Designing Embedded Multiprocessor Networks-on-Chip - CiteSeerX
238
DESIGNING EMBEDDED MULTIPROCESSOR NETWORKS-ON-CHIP WITH USERS IN MIND A Thesis Submitted to the Faculty of Carnegie Mellon University by Chen-Ling Chou In Partial Fulfillment of the Requirements for the Degree of Doctor of Philosophy April 2010
Transcript of Designing Embedded Multiprocessor Networks-on-Chip - CiteSeerX

DESIGNING EMBEDDED MULTIPROCESSOR NETWORKS-ON-CHIP
WITH USERS IN MIND
A Thesis
Submitted to the Faculty
of
Carnegie Mellon University
by
Chen-Ling Chou
In Partial Fulfillment of the Requirements for
the Degree of
Doctor of Philosophy
April 2010

ii
© Copyright by Chen-Ling Chou 2010
All Rights Reserved

iii
To my parents Chien-Te Chou, Hui-Yueh Chiang and my husband Hung-Chih Lai

iv
ACKNOWLEDGMENTS
I would like to express my sincere gratitude to all those who have inspired me during my
doctoral study and have supported me in finishing this dissertation.
I especially want to thank my advisor, Professor Radu Marculescu, for his continuous sup-
port, motivation and invaluable guidance during my research and study at Carnegie Mellon
University (CMU). His perpetual energy and enthusiasm in research had motivated all his
advisees, including me. Without his inspiration, patience, friendship and our stimulating dis-
cussions, this dissertation would have never been possible.
I am also grateful to my thesis committee members Professor Shawn Blanton, Dr. Michael
Kishinevsky, Prof. Twan Basten, and Prof. Onur Mutlu for their insightful suggestions and
comments on my research. In particular, I would like to thank Dr. Michael Kishinevsky for
hiring me as an intern at Intel Strategic CAD Lab. The associated experience broadened my
perspective on the practical aspects in the industry.
All my lab buddies at the Center for Silicon System Implementation (CSSI) of CMU made
it a convivial place to work. In particular, I would like to thank my colleagues at our System
Level Design (SLD) group, i.e. Paul Bogdan, Shun-ping Chiu, Cory Bevilacqua, Miray Kas,
and all previous members of SLD group, i.e. Jung-Chun (Mike) Kao, Umit Ogras, Nicholas H.
Zamora, and Ting-Chun Huang; They had inspired me in research and life through our interac-
tions during the long hours in the lab. Thanks.
v
I would also like to thank all of my friends in Pittsburgh who made this city a better place
to live. In particular, I would like to thank my badminton friends in CMU and University of
Pittsburgh, who have made my Ph.D. life more fruitful and exciting. Playing badminton regu-
larly with them makes me full of energy, as well as contributes to my persistence and hard-
working in research.
My deepest gratitude goes to my family (my mom Hui-Yueh Chiang, my father Chien-Te
Chou, and my husband Hung-Chih Lai) for their unflagging love and support throughout my
life; this dissertation is simply impossible without them. In particular, without the encourage-
ment and support from Hung-Chih, my graduate study would have finished much earlier with-
out a Ph.D. degree.
Finally, I would like to express my gratitude to several funding agencies, National Science
Foundation and Gigascale Systems Research Center, one of five research centers funded under
the Focus Center Research Program, a Semiconductor Research Corporation program.

vi
TABLE OF CONTENTS
Page
LIST OF TABLES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xi
LAST OF FIGURES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiii
ABBREVIATIONS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xviii
ABSTRACT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xx
1. Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1. Trends and Challenges for Embedded Systems . . . . . . . . . . . . . . . . . . . . . . . .1
1.2. Evolution of Embedded System Design . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3
1.3. Motivation for User-Centric Design. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8
1.3.1. User Behavior Variation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8
1.3.2. Proposed User-aware Design Methodology . . . . . . . . . . . . . . . . . . . . . .12
1.4. Dissertation Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15
1.4.1. DSE for Full-custom NoC with Predictable System Configurations . . .15
1.4.2. User-centric Design Methodology Handling Unpredictable System
Configurations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .15
1.5. Dissertation Organization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .20
2. Embedded NoC Platform Characterization. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.1. NoC Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .23
2.2. Application Modeling. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .29
2.3. Trace-based Energy Modeling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .30
2.3.1. User Trace Modeling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31
2.3.2. Computation Energy Modeling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .32

vii
2.3.3. Communication Energy Modeling . . . . . . . . . . . . . . . . . . . . . . . . . . . . .33
3. System Interconnect DSE for Full-custom NoC Platforms . . . . . . . . . . . . . . . . . . . . . . 35
3.1. Introduction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .35
3.2. Previous Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .37
3.3. System Interconnect in MPSoC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .38
3.3.1. General Framework for Application-specific MPSoC . . . . . . . . . . . . . .38
3.3.2. System Interconnect Problem Formulation . . . . . . . . . . . . . . . . . . . . . .40
3.3.3. Communication Fabric Exploration Flow . . . . . . . . . . . . . . . . . . . . . . .43
3.4. Optimization of System Interconnect Problem. . . . . . . . . . . . . . . . . . . . . . . . .45
3.4.1. Exact System Interconnect Exploration . . . . . . . . . . . . . . . . . . . . . . . . .45
3.4.2. Heuristic for Speeding up System Interconnect Exploration . . . . . . . . .48
3.5. Experimental Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .50
3.5.1. Industrial Case Study . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .50
3.5.2. Synthetic Applications for Larger Systems . . . . . . . . . . . . . . . . . . . . . .53
3.6. Summary. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .55
4. User-Centric DSE for Heterogeneous Embedded NoCs. . . . . . . . . . . . . . . . . . . . . . . . . 57
4.1. Introduction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .57
4.2. Related Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .58
4.3. Preliminaries . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .59
4.4. The Problem and Steps for DSE. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .62
4.4.1. User Behavior Similarity and Clustering . . . . . . . . . . . . . . . . . . . . . . . .62
4.4.2. Automated NoC Platform Generation . . . . . . . . . . . . . . . . . . . . . . . . . .65
4.4.3. Validation Process . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .70
4.5. Experimental Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .72
4.5.1. Evaluation of User Behavior Clustering. . . . . . . . . . . . . . . . . . . . . . . . .73
Page

viii
4.5.2. NoC Platform Evaluation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .75
4.5.3. Evaluation of Entire Design Methodology . . . . . . . . . . . . . . . . . . . . . . .76
4.6. Summary. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .77
5. Energy- and Performance-Aware Incremental Mapping for NoC . . . . . . . . . . . . . . . . . 79
5.1. Introduction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .79
5.2. Related Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .83
5.3. Motivational Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .84
5.4. Incremental Run-time Mapping Problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . .86
5.4.1. Proposed Methodology. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .86
5.4.2. Problem Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .88
5.4.3. Significance of the Problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .89
5.5. Solving the Incremental Mapping Problem . . . . . . . . . . . . . . . . . . . . . . . . . . .90
5.5.1. Solutions to the Near Convex Region Selection Problem. . . . . . . . . . . .90
5.5.2. Solutions to the Vertex Allocation Problem . . . . . . . . . . . . . . . . . . . . . .103
5.6. Experimental Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .107
5.6.1. Evaluation of Region Selection Algorithm on Random Applications. . .107
5.6.2. Evaluation of Vertex Allocation Algorithm on Random Applications . .109
5.6.3. Random Applications Considering Energy Overhead for the Entire Incremental Mapping Process. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .111
5.6.4. Real Applications Considering Energy Overhead for the Entire Incremental Mapping Process . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .112
5.7. Summary. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .114
6. Fault-tolerant Techniques for On-line Resource Management . . . . . . . . . . . . . . . . . . . . 117
6.1. Introduction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .117
6.2. Related Work and Novel Contributions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .120
6.3. Analysis for Network Contention and Spare Core Placement . . . . . . . . . . . . .121
Page

ix
6.3.1. Network Contention Impact . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .121
6.3.2. Spare Core Placement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .125
6.4. Investigations Involving New Metrics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .129
6.5. Fault-tolerant Resource Management. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .133
6.5.1. RUN_FT_MAPPING Process . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .134
6.5.2. RUN_FT_MAPPING Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .135
6.6. Experimental Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .138
6.6.1. Evaluation with Specific Patterns . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .138
6.6.2. Impact of Failure Rates with Spare Core Placement . . . . . . . . . . . . . . . .140
6.6.3. Evaluation with Real Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . .141
6.7. Summary. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .142
7. User-Aware Dynamic Task Allocation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
7.1. Introduction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .143
7.2. Related Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .147
7.3. Preliminaries and Methodology Overview. . . . . . . . . . . . . . . . . . . . . . . . . . . .148
7.3.1. Motivational Examples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .148
7.3.2. System Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .153
7.3.3. Overview of the proposed methodology . . . . . . . . . . . . . . . . . . . . . . . . .155
7.3.4. User Modeling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .157
7.4. Problem Formulation of User-Aware Task Allocation Process . . . . . . . . . . .159
7.5. User-Aware Task Allocation Approaches . . . . . . . . . . . . . . . . . . . . . . . . . . . .162
7.5.1. Solving the Region Forming Sub-problem (P1) . . . . . . . . . . . . . . . . . . .162
7.5.2. Solving the Region Rotation Sub-problem (P2) . . . . . . . . . . . . . . . . . . .165
7.5.3. Solving the Region Selection Sub-problem (P3). . . . . . . . . . . . . . . . . . .168
7.5.4. Solving the Application Mapping Sub-problem (P4) . . . . . . . . . . . . . . .168
Page

x
7.6. Light-Weight Model Learning Process . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .168
7.7. Experimental Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .171
7.7.1. Evaluation on Random Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . .173
7.7.2. Real Applications with Run-time Energy Overhead Considered . . . . . .177
7.7.3. Real Applications with On-line Learning of User Model . . . . . . . . . . . .180
7.8. Summary. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .183
8. Conclusions and Future Directions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 185
8.1. Dissertation Contributions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .185
8.2. Future Directions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .188
8.2.1. Challenges Ahead for User-centric Embedded System Design . . . . . . .188
8.2.2. Increasing Flow Experience by Designing Embedded Systems . . . . . . .189
LIST OF REFERENCES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193
APPENDIX A. Machine Learning Techniques Survey for User-centric Design . . . . . . . . 203
APPENDIX B. ILP-based Contention-aware Application Mapping . . . . . . . . . . . . . . . . . 207
B.1. Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .207
B.2. Preliminaries . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .207
B.3. Problem Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .209
B.4. ILP-based Contention-aware Mapping Approach . . . . . . . . . . . . . . .210
B.4.1. Parameters and Variables . . . . . . . . . . . . . . . . . . . . . . . . . .210
B.4.2. Objective Function . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .211
B.4.3. Constraints . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .212
B.5. Experimental Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .213
B.5.1. Experiments using Synthetic Applications . . . . . . . . . . . . .213
B.5.2. Experiments using Real Applications . . . . . . . . . . . . . . . . .215
B.6. Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .217
Page

xi
LIST OF TABLES
Table Page
1.1 Three different categories of user-system interaction. . . . . . . . . . . . . . . . . . . . . . . . 11
2.1 Impact of adding the control network on area. The synthesis is performed for Xilinx Virtex-II Pro XC2VP30 FPGA.. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.1 Architecture template for the NoC platform. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
4.2 Computation energy consumption comparison for three trace clusters and different resource sets derived by the proposed and traditional design flow. . . . . . . . . . . . . . 75
5.1 L1(R’) + L1(R-R’) minimization problem when using the Euclidean Minimum (EM), Fixed Center (FC), and Neighbor_aware Frontier (NF) heuristics. . . . . . . . . 97
5.2 Mapping approach proposed in [27] vs. our algorithms results. . . . . . . . . . . . . . 114
6.1 Comparison among the Random, MBS [99], and Nearest Neighbor (NN) [27] map- ping methods.. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
6.2 Throughput and Energy Consumption between proposed FT and Nearest Neighbor (NN) approaches for all-to-all and one-to-all communication patterns. . . . . . . . . 139
6.3 Impact of contamination area on different failure rates under Side and Random spare core placements. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
6.4 Comparison between the Nearest Neighbor (NN) and our FT mapping results on the overall system performance. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
7.1 Event communication cost [in bits] for three approaches and five applications entering in the system as shown in Figure 7.2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
7.2 Comparison of communication consumption among different approaches on a different size NoCs. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177
7.3 Comparison of the run-time overhead and the overall communication energy savings under four implementations on a 5 × 5 mesh NoC. . . . . . . . . . . . . . . . . . . 180

xii
7.4 Normalized event cost in stages 1, 2, and 3 under different user models from four users normalized to the total event cost of “Nearest Neighbor [27]” approach.. . . . 181
B.1 Energy and throughput comparison between energy-aware in [79] and contention-aware mapping. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 214
B.2 Communication energy overhead and throughput improvement of our contention- aware solution compared to the energy-aware solution [79]. . . . . . . . . . . . . . . . . . 215
PageTable

xiii
LIST OF FIGURES
Figure Page
1.1 General idea of newly proposed user-centric design. . . . . . . . . . . . . . . . . . . . . . . . 3
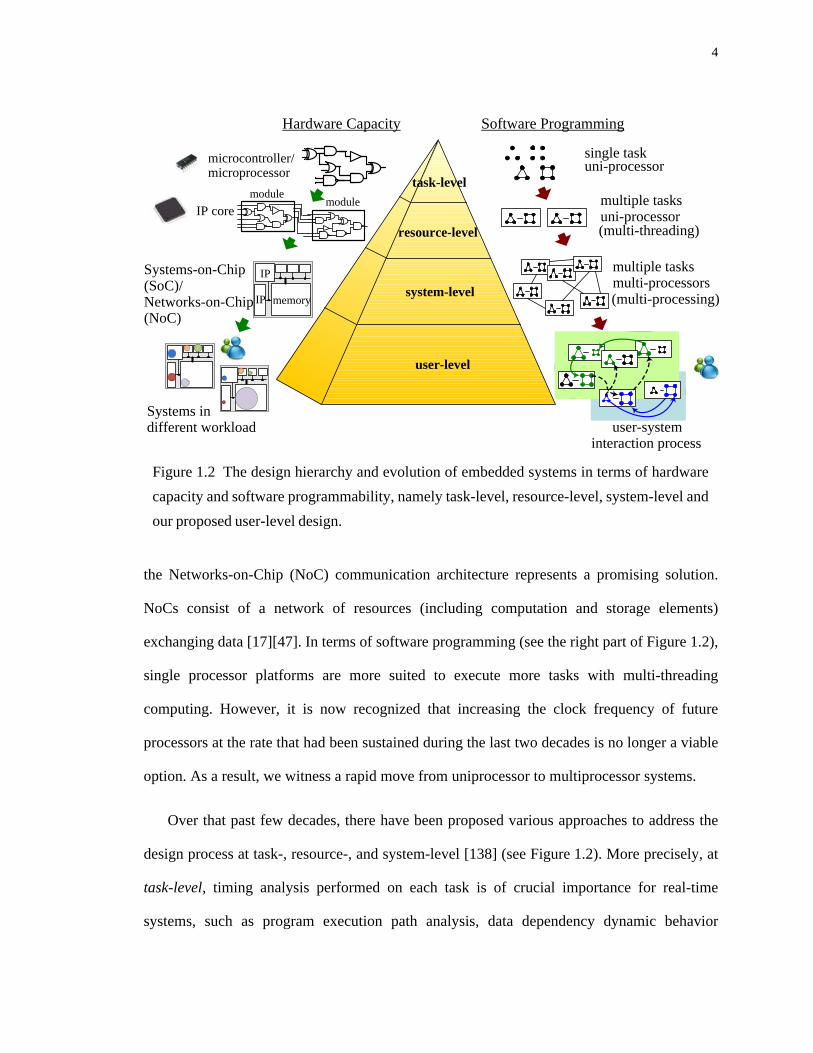
1.2 The design hierarchy and evolution of embedded systems in terms of hardware capacity and software programmability, namely task-level, resource-level, system- level and our proposed user-level design. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
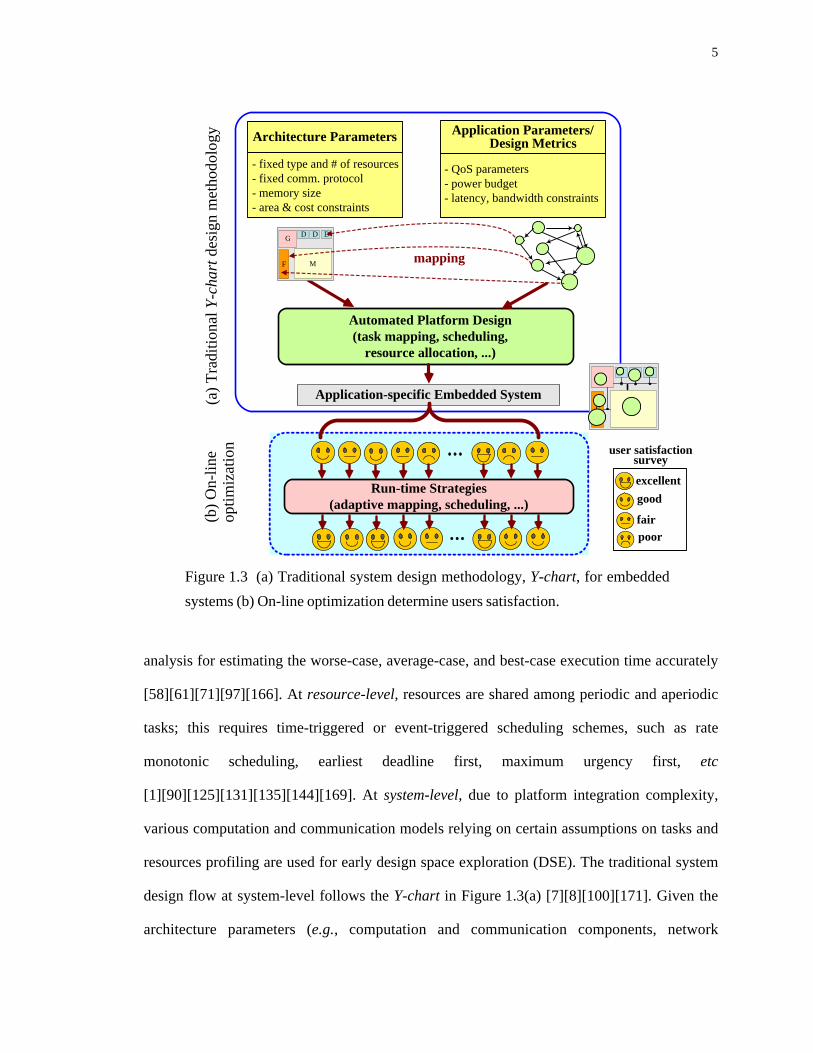
1.3 (a) Traditional system design methodology, Y-chart, for embedded systems (b) On- line optimization determine users satisfaction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.4 Hierarchy of needs at each level of abstraction from system designer and user per- spectives. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.5 Three-day user traces from two users. (a) Appearances of five different Windows applications (b) Total number of applications in the system of each time instant. . 9
1.6 User satisfaction ratings corresponding to different CPU usage for two users. . . . 10
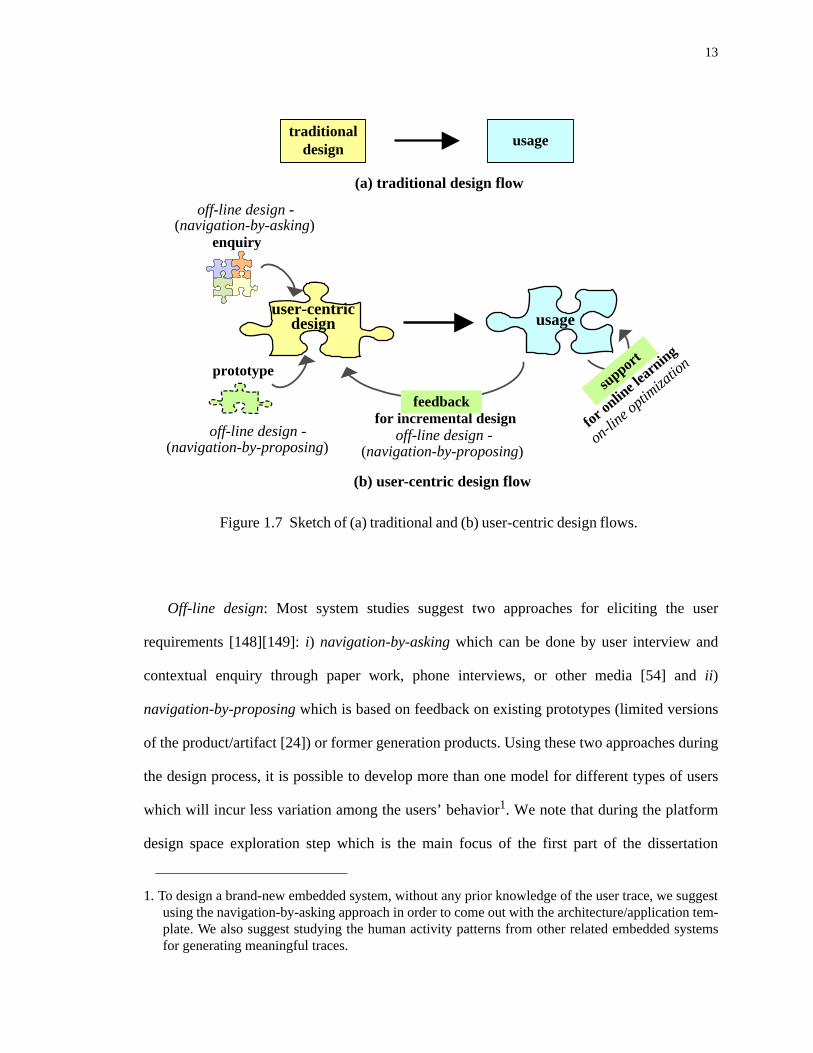
1.7 Sketch of (a) traditional and (b) user-centric design flows. . . . . . . . . . . . . . . . . . . 13
1.8 User-centric design flow for heterogeneous NoCs, including user behavior analysis, NoC architecture automation, and optimization process. Five types of problems with the “*” sign with their related machine learning techniques are surveyed in Appendix A.. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.1 Homogeneous or heterogeneous 2-D mesh NoCs with PEs and interconnect via the data and control networks described in a generalized way.. . . . . . . . . . . . . . . . . . . 25
2.2 (a) The logical view of the control network. (b) The on-chip router micro-archi- tecture that handles the control network.. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.3 Application Characterization Graph (ACG) characteristics. The tasks belonging to the same vertex are mapped onto the same PE. Each edge represents the commu- nication between two nodes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.1 Block diagram for a general MPSoC platform. . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.2 General platform with multiple IPs communicated via the system interconnect. . . 39

xiv
3.3 (a) System interconnect design space trading off the system performance and area/ wirelength overhead (b) Traditional bus model connecting four IP blocks (c) Fully connected switches with four IP blocks (d) Possible optimized communication fabric for four IP blocks. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.4 The flow of the communication fabric design space exploration with the analysis, simulation, and evaluation stages shown explicitly. . . . . . . . . . . . . . . . . . . . . . . . . 44
3.5 A three-IP example of communication fabric exploration using the branch and bound algorithm. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.6 The pseudo code of the system interconnect exploration using the branch and bound method. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.7 The proposed heuristic for four IPs with the number of muxes set to 2. . . . . . . . . 49
3.8 System interconnect exploration for a real SoC design. (a) Pareto-optimal set (latency vs. fabric area) obtained via analysis. (b) Simulation results for solutions in (a). (c) Pareto-optimal set (i.e., latency vs. fabric wirelength) obtained via analysis. (d) Simulation results for solutions in (c). . . . . . . . . . . . . . . . . . . . . . . . . 51
3.9 Forty non-Pareto points and Pareto curve plots obtained via analysis (a) and via simulation (b). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.10 Solutions comparison between branch and bound method (BB) and the proposed heuristic for system interconnect exploration of a synthetic application with 13 IP blocks. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
3.11 Run-time and solution quality comparison between branch and bound approach (BB) and our heuristic as the system size scales up. . . . . . . . . . . . . . . . . . . . . . . . . 54
4.1 The proposed user-centric design flow in terms of the off-line DSE processes. . . 60
4.2 Main steps of user behavior clustering. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
4.3 Main steps for computational resource selection.. . . . . . . . . . . . . . . . . . . . . . . . . . 66
4.4 Main steps for resource location assignment. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
4.5 Validation process of the newly proposed methodology.. . . . . . . . . . . . . . . . . . . . 71
4.6 Pareto points showing the tradeoffs between price and computation energy con- sumption. For each cluster, four users are randomly selected and their Pareto curves are plotted. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
5.1 Example of NoC incremental application mapping comparing the greedy and our proposed solutions. The greedy approach which does not consider additional mappings incurs higher communication overhead for App 2, and the system
PageFigure

xv
communication cost as well, compared to our proposed solution. . . . . . . . . . . . . . 80
5.2 Motivational example for incremental mapping process. (a) Optimal solution (b) Near convex region solution. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
5.3 Overview of the proposed incremental mapping methodology.. . . . . . . . . . . . . . . 86
5.4 Overview of the proposed methodology. (a) The incoming application ACG (b) Current system configuration (c) The near convex region selection step (d) The ver-tex allocation step. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
5.5 The impact of Manhattan Distance (MD) on communication energy consumption for four different scenarios (S1-S4). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
5.6 L1(R’) + L1(R-R’) minimization problem: select a region R’, such that the sum of the total Manhattan Distance (MD) between any pair of tiles inside region R and that inside region R-R’ is minimized. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
5.7 Region with N = 20 resulting from several distinct methods, namely (a) Best Case (BC) (b) Worst Case (WC) (c) Euclidean Minimum (EM) (d) Fixed Center (FC) (e) Random Frontier (RF) (f) Neighbor_aware Frontier (NF). Note that the shape of the resulted regions would be the same even if shifted to other coordinates. Here, we only consider minimizing the total Manhattan Distance between any pair of these N tiles inside R’, i.e., L1(R’). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
5.8 L1 distance results showing the scalability of the solutions obtained via the Best Case (BC), Worst Case (WC) and four heuristics (EM, FC, RF, and NF).. . . . . . . 95
5.9 Histogram over 1000 runs for L1(R’) + L1(R-R’) minimization problem. We repre- sent [L1(R’) + L1(R-R’)] distances on the x-axis and their frequency of occurrence on the y-axis. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
5.10 Dispersion and Centrifugal factor calculation example. . . . . . . . . . . . . . . . . . . . 99
5.11 Near convex region selection algorithm. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
5.12 Incremental run-time mapping process. (a) The ACG of the incoming application (b) Current system behavior (c) Near convex region selection process (d) Vertex allocation process. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .101
5.13 Vertex allocation algorithm. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
5.14 Vertex allocation process based on the example in Figure 5.12. (a) Initial con- figuration with every vertex white. (b) Vertex 6 is discovered. (c) Vertex 9 is discovered. (d) Vertex 7 is finished and colored black. (e) Vertex 9 is colored from gray to black. (f) Vertex 6 is colored from gray to black (g) Vertex allocation process is done; all vertices are colored black. . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
PageFigure

xvi
5.15 (a) Impact of selection region process on inter-processor communication. (b) Com- munication energy loss: optimal mapping vs. our allocation algorithm given a selected region. (c) Optimal vs. our allocation algorithm under different com- munication rates. (d) Communication energy savings: arbitrary mapping vs. our allocation algorithm. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
5.16 Communication energy consumption comparison using random applications. . . 111
6.1 Non-ideal 2-D mesh platform consists of resources connected via a network. The re- sources include computational tiles (i.e., manager titles, active and spare cores) and memory titles. Permanent, transient, or intermittent faults may affect the computational and communication components on this platform. . . . . . . . . . . . . . 118
6.2 Application mapping on mesh-based 3 × 3 NoC (a) Application characteristic ACG = (V, E) (b) Source-based contention (c) Destination-based contention (d) Path-based contention. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
6.3 The (a) source-based (b) destination-based (c) path-based contention impact on average packet latency. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
6.4 (a) Application Characterization Graph (ACG) (b) Spare cores (‘S’) are assigned towards the side of the system. (c) Spare cores ‘S’ are randomly distributed in the system (d) Spare cores ‘S’ are evenly distributed in the system. . . . . . . . . . . . . . . 126
6.5 Quantitative analysis on the performance impact on three different spare core placements. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
6.6 Two mapping results for the ACG in Figure 6.4(a) where the spare cores are ran- domly placed on the platform. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
6.7 3D Kiviat plots showing WMD, LCC, and SFF metrics for three difference map- ping schemes (i.e., Random, MBS, and NN). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132
6.8 The FT resource management framework. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
6.9 Main steps of RUN_MIGRATION process. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
6.10 Main steps of RUN_FT_MAPPING process. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
7.1 Contiguous (a) and non-contiguous (b)-(e) allocations for four applications using standard techniques.. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
7.2 Motivational example of run-time resource management with user behavior taken into consideration. (a) Application characteristics. (b) Events in the system. (c)(d)(e) Task allocation scheme under Approach 1, Approach 2, and Hybrid ap- proach, respectively. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
7.3 Overview of the proposed methodology. Default approach (i.e., Approach 2) is
PageFigure

xvii
applied in stage 1. Hybrid approach with pre-defined user model is applied in stage 2. Hybrid approach with on-line learned user model is applied in stage 3. . . 155
7.4 Algorithm flow for our proposed methodology.. . . . . . . . . . . . . . . . . . . . . . . . . . . 156
7.5 Main steps of the region forming algorithm. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163
7.6 Example showing the region forming algorithm on an ACG. . . . . . . . . . . . . . . . . 164
7.7 The subtraction calculation during the region rotation process. . . . . . . . . . . . . . . . 166
7.8 Main steps of the region rotation algorithm.. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167
7.9 Four possible decision tree structures for user model. . . . . . . . . . . . . . . . . . . . . . . 169
7.10 4-fold cross-validation for model learning. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
7.11 (a) Pseudo codes of tree structure learning process without cross-validation method and (b)(c) with cross-validation method. . . . . . . . . . . . . . . . . . . . . . . . . . . 162
7.12 Communication energy loss compared to the optimal solution for (a) region forming (P1) sub-problem and (b) application mapping (P4) sub-problem on a 2D- mesh NoC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174
7.13 (a) Communication cost comparison among Approach 1, Approach 2, and the hybrid approach (which considers the user behavior) on an 8 × 8 NoC. (b) L(R) where R is the available/unused resources comparison among Approach 1, Ap- proach 2, and thee hybrid approach. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176
8.1 Model exploration for user-centric design flow. . . . . . . . . . . . . . . . . . . . . . . . . . . 188
8.2 Four-quadrant states in terms of challenge and skill level.. . . . . . . . . . . . . . . . . . . 191
A.1 (a) Five types of problems for user-centric design i) classification ii) regression iii) similarity iv) clustering v) reinforcement learning (b) Selected machine learn- ing approaches. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .204
B.1 (a) Logical and (b) physical application characterization graph. (c) one core map- ping example.. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 208
B.2 Path-based contention count in a 4 × 4 NoC comparing the random, energy-aware in [79] and contention-aware mapping. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 214
B.3 (a) Parallel-1 benchmark (b)(c) Mapping results of the energy-aware approach [79] and our contention-aware method (d) Average packet latency and throughput comparison under these two mapping methods. . . . . . . . . . . . . . . . . . . . . . . . . . . . 216
PageFigure

xviii
ABBREVIATIONS
ACG Application characterization graph
CC Computation capacities
CMP Chip multiprocessors
DSE Design space exploration
DSP Digital signal processor
E3S Embedded system synthesis benchmark
GM Global manager
FCA Failure contamination area
FIFO First-in-first-out
FT Fault tolerant
GPU Graphics processing units
IDC Identification content
ILP Integer linear programming
I/O Input/output
IP Intellectual property
LACG Logical application characterization graph
MCR Minimal computation requirement
MD Manhattan distance
MPSoC Multiprocessor Systems-on-Chip
NI Network interface
NN Nearest neighbor
NoC Networks-on-Chip
OS Operating system
PACG Physical application characterization graph
PCI Peripheral component interconnect

xix
PDA Personal digital assistant
PE Processing element
PL Port location
PTM Predictive technology model
RMS Recognition, mining, and synthesis
SATA Serial advanced technology attachment
SoC Systems-on-Chip
UART Universal asynchronous receiver/transmitter
USB Universal serial bus
WCET Worst case execution time

xx
ABSTRACT
Future embedded Systems-on-Chip (SoCs) designed at nanoscale will likely consist of
tens or hundreds of (potentially energy-efficient) heterogeneous cores supporting one or sev-
eral dedicated applications. For such systems, the Networks-on-Chip (NoC) communication
architectures have been proposed as a scalable solution which consists of a network of
resources exchanging packets while running various applications concurrently. Over recent
years, embedded systems have gained an enormous amount of processing power and function-
ality with the ultimate goal on power and performance optimization.
In this dissertation, with the ultimate goal that any system optimization is to satisfy the end
user, we study outstanding problems on embedded system methodology, while incorporating
the user behavior information into the modeling, analysis, optimization, and evaluation steps.
Our specific contributions are as follows.
• For predictable system configurations derived from use-case applications, we explore
the design space of system interconnect on application-specific multi-processor sys-
tems-on-chips (MPSoCs). With the proposed analytical and simulation models, we can
theoretically generate fabric solutions with optimal cost-performance trade-offs, while
considering various design constrains, such as power, area, and wirelength.
• For unpredictable system configurations incorporating users’ interaction with the sys-
tem, we present a new design methodology for automatically generating regular NoC
platforms, while including explicitly the information about the user experience into the
xxi
design process. Such off-line design flow aims at minimizing the workload variance and
allows the system to better adapt to different types of uses.
• For applications entering and leaving the system dynamically, we propose an efficient
technique for run-time application mapping onto heterogeneous NoC platforms
with the goal of minimizing the communication energy consumption, while still
providing performance guarantees. The proposed technique allows for new appli-
cations to be easily added to the system platform with minimal inter-processor
communication overhead.
• To address the problem of runtime resource management in NoC platforms while con-
sidering permanent, transient, and intermittent failures, we propose a system-level fault-
tolerant approach that investigates several metrics for network contention and system
fragmentation, as well as their impacts on system performance.
• Finally, having generated system platforms which exhibit less variation among the
users’ behavior, we explore flexible and extensible run-time resource management tech-
niques that allow system to adapt to run-time stimuli specific to each class of user
behaviors; these techniques change dynamically according to the user models built on-
line based on different user needs.

1
1. INTRODUCTION
1.1. Trends and Challenges for Embedded Systems
Embedded systems consist of hardware and software integrated on the same silicon
platform that typically runs one or a few dedicated applications in a static or dynamic manner
[116]. These systems became very popular in recent years and in fact dominate the
semiconductor industry nowadays. To give a bit of perspective, whereas only 3% of
processors are used in general-purpose workstations, desktop or laptop computers, about 97%
of the 6.5 billion processors produced worldwide in 2004 were integrated into embedded
systems that were deployed in avionics, automotive, multimedia, consumer electronics, office
appliances, robots and toys [55].
From a technological standpoint, computing hardware has improved dramatically over the
past forty years. As Gordon Moore predicted, almost every measure of capability in electronic
devices (e.g., processor speed, memory storage capacity, etc.) has improved at roughly
exponential rates over the years. For example, flashes with capacities over 1GB have replaced
3-1/2 inch floppy disks with a capacity of 1.44MB, while cell phones have gradually replaced
beepers and other obsolete communication devices because of their higher flexibility and
efficiency in communication [6]. However, among these high-tech products, only a few of
them made a long lasting impact, while others got eliminated through competition.
A natural question is then whether or not the success of embedded systems follows in
some sense Darwin’s principle of natural selection [48], or Spencer’s concept on survival of

2
the fittest [157]? In short, both philosophies argue that all species evolve from common
ancestors and only the fittest organisms get the chance to prevail over time.
Although finding a definite answer is a complicated endeavor, we believe that such ideas
may also apply to the evolution of embedded systems. More precisely, we believe that the
success of various embedded systems comes as a result of users selection and therefore the
products which fit users demands the best, would eventually dominate the market; the other
products are simply not competitive and they are meant to perish over a short period of time.
Perhaps, a more appropriate interpretation of these classical principles of evolution in the
context of embedded systems would be consider the survival of the “fit enough” system.
Indeed, although embedded systems have gained an enormous amount of processing power
and functionality, from users’ perspective, the newest or the most advanced products are not
necessarily the best. Instead, quite often, one can observe that products that “fit enough”, or
provide “just-enough performance” do reasonably well [132], and so designers can rather
focus on adding some additional features (e.g., appearance, low power, practicability,
interface, price) rather than focusing exclusively on improving devices raw performance.
Indeed, due to the high variability seen in user preferences, it becomes much more challenging
for system designers to satisfy the users taste, and this is especially true for the large class of
personal embedded systems (e.g., cell phones, personal digital assistants (PDAs), gaming
devices, etc.) [86].
Starting from these ideas, and in contrast to the traditional design flow, we propose a user-
centric embedded system design methodology which gets users directly involved in the design
flow, with the goal of minimizing the workload variance; this allows the system to better adapt
to different types of user needs and workload variations. More specifically, we collect traces
from various users (see dots in Figure 1.1) and investigate important behavioral traits in order
to cluster them (see circles in Figure 1.1). For each cluster of such user traces and depending

3
on the architectural parameters extracted from high-level specifications, we propose an
optimization technique for system architecture (see the square in Figure 1.1 which is done at
design time). We also propose validation techniques to assess the robustness of the newly
proposed design methodology. For such a design, we can further apply optimization
techniques (see arrow in Figure 1.1 which means at run time) to better adapt to users’
requirements on-line. Of note, in this dissertation, we restrict our attention to user-centric
design for embedded applications. However, we believe the idea of “user-centric design” can
be applied to other areas too, such as web applications [25][26], marketing business
[128][148], user interface design [133] and games design [139].
1.2. Evolution of Embedded System Design
Embedded systems today are increasingly complex and multi-functional in nature. The
design hierarchy, as well as the evolution, of embedded systems can be represented as in
Figure 1.2. Given the advances in the semiconductor industry (see the left part of Figure 1.2),
more and more microprocessors are used for building real systems. Moreover, the Intellectual
Property (IP) integrated solutions provide Systems-on-Chip (SoC) designers with a fast way to
develop robust embedded applications. For providing high scalability in large SoC designs,
Figure 1.1 General idea of newly proposed user-centric design.
user behavior traits 1
user
beh
avio
r tra
its 2 : user traces
: cluster with similar user traces
: at design time, sort of ideal platforms are generated for each cluster
: at run-time, making these platforms better adapt to users’ requirements
4
the Networks-on-Chip (NoC) communication architecture represents a promising solution.
NoCs consist of a network of resources (including computation and storage elements)
exchanging data [17][47]. In terms of software programming (see the right part of Figure 1.2),
single processor platforms are more suited to execute more tasks with multi-threading
computing. However, it is now recognized that increasing the clock frequency of future
processors at the rate that had been sustained during the last two decades is no longer a viable
option. As a result, we witness a rapid move from uniprocessor to multiprocessor systems.
Over that past few decades, there have been proposed various approaches to address the
design process at task-, resource-, and system-level [138] (see Figure 1.2). More precisely, at
task-level, timing analysis performed on each task is of crucial importance for real-time
systems, such as program execution path analysis, data dependency dynamic behavior
task-level
resource-level
system-level
user-level
modulemodule
IP
IP memory
Figure 1.2 The design hierarchy and evolution of embedded systems in terms of hardwarecapacity and software programmability, namely task-level, resource-level, system-level andour proposed user-level design.
Hardware Capacity Software Programming
single taskuni-processor
multiple tasksuni-processor
multiple tasksmulti-processors
microcontroller/
IP core
Systems in
microprocessor
(multi-threading)
(multi-processing)
different workload user-systeminteraction process
Systems-on-Chip(SoC)/Networks-on-Chip(NoC)
5
analysis for estimating the worse-case, average-case, and best-case execution time accurately
[58][61][71][97][166]. At resource-level, resources are shared among periodic and aperiodic
tasks; this requires time-triggered or event-triggered scheduling schemes, such as rate
monotonic scheduling, earliest deadline first, maximum urgency first, etc
[1][90][125][131][135][144][169]. At system-level, due to platform integration complexity,
various computation and communication models relying on certain assumptions on tasks and
resources profiling are used for early design space exploration (DSE). The traditional system
design flow at system-level follows the Y-chart in Figure 1.3(a) [7][8][100][171]. Given the
architecture parameters (e.g., computation and communication components, network
- QoS parameters- power budget- latency, bandwidth constraints
Application Parameters/ Design Metrics
- fixed type and # of resources- fixed comm. protocol - memory size- area & cost constraints
Architecture Parameters
Automated Platform Design(task mapping, scheduling,
resource allocation, ...)
G
M
D
F
D D
mapping
Application-specific Embedded System
user satisfactionsurvey
Run-time Strategies(adaptive mapping, scheduling, ...)
...
...
excellentgood
fairpoor
G
M
D
F
D D
Figure 1.3 (a) Traditional system design methodology, Y-chart, for embeddedsystems (b) On-line optimization determine users satisfaction.
(a) T
radi
tiona
l Y-c
hart
des
ign
met
hodo
logy
(b) O
n-lin
e op
timiz
atio
n
6
topology, etc.) and application-specific parameters (e.g., power constraints, maximum
latency, multiple use-cases [106], etc.), the customized architecture (or system platform) is
automatically generated offline using static techniques, such as generic optimization
[4][114], symbolic search [60][109][150], predictive modeling [44][91][121], or dynamic
programming [31]. Afterwards, the system is manufactured and deployed for use by different
users as shown in Figure 1.3(b). However, due to differences in users’ behavior, the platform
will likely not satisfy all the users equally well, even assuming perfect techniques for run-
time optimization. In other words, some users may find the system difficult or inefficient to
use, even though it may be highly recommended by other users. Such issues are typically the
cause for significant losses in product sales and revenues.
Since any system optimization has ultimately the goal of satisfying each end user, we
consider one more level in this design hierarchy, namely the user-level, in order to deal with
the real workload variation from different users [132]. As shown in this representation (see the
bottom of the pyramid in Figure 1.2), the users interact directly with the system. Due to
variations in users’ behavior, the workload across different resources may exhibit high
variability even when using the same hardware platform. Murali et al. in [106] deal with the
mapping for a finite set of use-cases on an given NoC where all use-cases belong to the same
task sets. Our methodology targets generating NoC-based platforms for multiple applications
simultaneously running on it where each application has its own task set. In addition, our
scenario considers the users’ interaction with the system; therefore, the system configurations
at each time instant in our case are impossible to be predicted off-line [62]. This motivates us
to define a new DSE methodology for future embedded systems by considering an extra
degree of freedom, namely, the user experience; this encompasses all aspects related to end-
user interaction with the platform and the associated design costs (e.g., power, performance).

7
In order to design embedded systems from users perspective, we discuss the needs at each
level of abstraction both from system designers and users perspectives, as shown in
Figure 1.4. First, at the task- and resource- level, the designers need to make sure that the
codes for tasks are error-free and are written in a modular style (i.e., IP module). Later, the IP
module integration/composition at system-level can help building the embedded systems,
while covering the entire design space for early estimation (i.e. system composability). In
addition, at user-level, a wide range of embedded systems usually considers programmability
purposes to support system upgradability and extensibility for dealing with any other run-time
system changes from various users.
Once the system is manufactured and deployed, the needs are different from the users
perspective (see Figure 1.4). Basically, users purchase the end products based on the
functionality and features they need. Also, the end products need to be easy to set up
(reliability), operate (usability), and update (adaptability) in order to support different run-
time stimuli and user preferences. Therefore, our main contribution in this work is to develop
Figure 1.4 Hierarchy of needs at each level of abstractionfrom system designer and user perspectives.
errorless
functionality
modularity
reliability
composabilityusability
extensibilityadapability
Designer perspective
User perspective
desi
gn c
ompl
exity
user
dem
and
task-level
resource-level
system-level
user-level

8
the user-centric design methodology, both from system designers and users perspectives; the
user-centric design flow as discussed in the next section.
1.3. Motivation for User-Centric Design
As discussed above, future embedded systems running multiple applications concurrently
should rely on a variety of system configurations, which are challenging to design. Although
prior work for exploring the design space exists [66], the traditional design flow (see
Figure 1.3) still can generate only one or just a few platform configurations, most likely along
the same Pareto curve which trades off multiple objectives [51]. However, due to the
potentially high user behavior variation, such a platform (or limited set of platforms) still
hardly meet all user needs or maximize the users satisfaction even assuming perfect
techniques for run-time optimization. Given all the above considerations, this section first
discusses the potential use of user-centric design flow (see Section 1.3.1) and later introduces
a novel idea on developing new methodologies and optimization techniques to get users
directly involved in the design flow (see Section 1.3.2).
1.3.1. User Behavior Variation
The critical questions that determine the potential use of user-centric design flow are as
follows: i) How much difference in users’ behavior there is? ii) How one can make sure that a
particular user is satisfied with the system at hand? iii) Is it necessary to propose different
designs for different users? In this chapter, we try to answer these questions based on some
realistic user traces.
Regarding the first question, Figure 1.5 presents data and the corresponding CPU usage
from a three-day trace (about 7-9 working hours per day) of two user sequences collected from

9
five applications, namely Internet Explorer, Microsoft Office Powerpoint, Matlab, Adobe
Acrobat, and Microsoft Office Word running under Windows XP. More precisely,
Figure 1.5(a) plots the presence of these five applications separately with “high/low” values
meaning application “running/not running” in the system (with solid and dash lines for two
different users). Figure 1.5(b) shows the total number of applications executed in the system
for these two users (in this representation, each time unit represents 15 minutes). As we can
see, the arrival order and frequencies of application entering and leaving the system vary a lot
from one user to another. Based on data on these five applications, the average number of
0 20 40 60 80 1000
1
2
3
4
5
Time unit
# of
app
licat
ions
in
the
syst
em0 20 40 60 80 100
Win. explorer
MSpowerpoint
Matlab
Adobeacrobat
MSword
Time unit
Figure 1.5 Three-day user traces from two users. (a) Appearances of five differentWindows applications (b) Total number of applications in the system of each time instant.
user 1 user 2
(a)
(b)
Time unit
Time unit0 20 40 60 80 100
0 20 40 60 80 100
5
# of
app
licat
ions
in th
e sy
stem
Internet Explorer
Microsoft OfficePowerpoint
Matlab
Adobe Acrobat
Microsoft OfficeWord
4
3
2
1
0

10
applications running in the system concurrently is 2.48 and 2.06 for solid-line and dash-line
users, respectively, while the switching frequency (i.e., number of times to switch from one
application to another) is 1.1/15mins and 1.5/15mins, respectively. Moreover, from these
collected traces, we observe that the solid-line user makes always a high use of CPU (i.e., on
average, 60% CPU use with variance 71), while the dash-line user has a higher variance of
CPU utilization (i.e., on average, 46% CPU use with a variance of 540).
With respect to the second question, recent studies have shown that there exists a
considerable variation in user expectation and user satisfaction relative to the actual system
performance [68][152][153]. Namely, some users are sensitive to system changes, while
others are not. Evidence is given in Figure 1.6. showing the relationship between the CPU
usage for some collected traces and the user satisfaction for two different users. During
experiments, users typically provide a satisfaction rating (1: very poor, 2: poor, 3: indifferent,
4: good, to 5: very good) every 15 minutes. The correlation of the user satisfaction rating
(variable x) to the CPU usage (variable y) can be interpreted using Pearson’s Product Moment
Correlation Coefficient (rxy):
Figure 1.6 User satisfaction ratings corresponding to different CPU usage for two users.
1 2 3 4 50
20%
40%
60%
80%
100%
CPU
usa
ge
User satification (1: very poor - 5: very good)
user 1
user 2

11
(1.1)
where n is the number of points in the data series X and Y written as xi and yi where i =
1,..., n. The correlation results in a value between -1 and 1, indicating the degree of linear
dependence between the variables. As it approaches zero there is less of a relationship. On the
contrary, the closer the coefficient to either -1 or 1, the stronger the correlation between the
variables; the more sensitive of the user to the CPU usage. As observed in Figure 1.6, the
correlation between the CPU usage and the user satisfaction for the first and the second user is
-0.36 and -0.85, respectively. We can conclude that user 2 is more sensitive to the CPU
utilization. This variation in user satisfaction indicates the existence of potential for further
optimization.
Regarding the third question, indeed, it is important to analyze how users interact with the
systems they use. We classify such interaction into three categories. Table 1.1 summarizes the
differences between these three categories:
Table 1.1 Three different categories of user-system interaction.
User-system Interaction Applications Note
I. shared, and used by several people at
one time
flight schedulemonitors, cen-tral air-condi-tioners, etc.
policy-driven,designed for popularity
II. shared, but only used by one person
at one time
ATM machines,equipment infitness centers,rental cars,computers inlibraries, etc.
event-driven,designed for
diversification
III. non-shared, one person owns the
system
cell phones, per-sonal digitalassistant (PDA),mp3 player, etc.
user-driven,designed for
user satisfaction
rxy
n xiyi∑ xi∑( ) yi∑( )×–
n xi2
∑ xi∑( )2
– n yi2
∑ yi∑( )2
–×-----------------------------------------------------------------------------------------------=
systemtime n
systemtime n+1
systemtime n + N...
systemtime n
systemtime n+1
systemtime n + N...
systemtime n
systemtime n+1
systemtime n + N...

12
The systems in the first category are public and can be used by several people at the same
time. The design of such systems places emphasis on wide accessibility and it always follows
a static policy. Flight schedule monitors, for instance, fall into this category. We suggest
surveying the human dynamics for this category.
The second category of systems are also public, but are only used by one person at a time.
Equipment in fitness centers or computers in a library belong to this category. We suggest
storing diverse (default) settings for such system; while an user logs in, or say an event occurs,
the system can adapt easily to his/her preferences.
The third (and the most difficult to design) category is represented by systems that are
personal, such as cell phones, PDAs or laptops. Due to the high variation in users satisfaction,
we suggest minimizing such variations not only during the off-line DSE but also at run-time.
In this dissertation, we focus on the design belonging to the second and third categories
while for design in the first category, there is a need to explore the human pattern activity
(more discussion are elaborated in Section 8.2.2).
1.3.2. Proposed User-aware Design Methodology
With the above discussion, we delve now into presenting new methodologies and
optimization techniques that have the users directly involved in the design flow as shown in
Figure 1.7. More precisely, in contrast to traditional design flow (see Figure 1.7(a)), we first
incorporate the user experience into the design process in order to minimize the workload
variance; then, we apply further optimizations in order to maximize the overall user
satisfaction (see Figure 1.7(b)). This process has two major steps:
13
Off-line design: Most system studies suggest two approaches for eliciting the user
requirements [148][149]: i) navigation-by-asking which can be done by user interview and
contextual enquiry through paper work, phone interviews, or other media [54] and ii)
navigation-by-proposing which is based on feedback on existing prototypes (limited versions
of the product/artifact [24]) or former generation products. Using these two approaches during
the design process, it is possible to develop more than one model for different types of users
which will incur less variation among the users’ behavior1. We note that during the platform
design space exploration step which is the main focus of the first part of the dissertation
1. To design a brand-new embedded system, without any prior knowledge of the user trace, we suggestusing the navigation-by-asking approach in order to come out with the architecture/application tem-plate. We also suggest studying the human activity patterns from other related embedded systemsfor generating meaningful traces.
user-centricdesign usage
prototype
enquiry
for incremental designfeedback
support
for onlin
e learning
Figure 1.7 Sketch of (a) traditional and (b) user-centric design flows.
(a) traditional design flow
(b) user-centric design flow
(navigation-by-asking)
off-line design -
on-line o
ptimiza
tion
off-line design -
(navigation-by-proposing)
off-line design - (navigation-by-proposing)
traditional design usage
14
[40][41], we target the main features (i.e., critical and predictable workload) of the system
from the hardware resources perspective with deterministic software running on it (i.e.
deterministic resource management, deterministic routing scheme, etc.). In other words, the
workloads generated by the newly downloaded applications or updated will stress the
hardware resources of the SoC in a similar manner as the initial set of applications and
therefore incur a minimal penalty.
On-line optimization: Due to various user expectations, a lightweight on-line optimization
is proposed to maximize the user satisfaction. Suggested methods includes reinforcement
learning (i.e., the system learns the behavior through trial-and-error interactions with a
dynamic environment [152][153]) and regression (i.e., predict or forecast the following
behavior [36][122]). Of note, system upgradability and extensibility are now considered
important features for a wide range of embedded systems, as discussed in Figure 1.4 of
Chapter 1.2; that is, the platform should be flexible enough to support various run-time system
changes, including newly-downloaded applications, third-party application programs, bug
fixes/patches, etc. However, all such updates are typically captured in software replacement
(e.g., based on the latest release of the firmware [12][67]) which is used to upgrade a system
already deployed in the field, rather than the off-line platform design space exploration step.
For all such updates, the hardware resources inside the system remain the same, but just a
different version of the firmware would be used to support the application updates. Similar
work can be seen in [38] which proposes an on-line user model for dynamic resource
management under a real-time operating system where the parameters would be updated
accordingly to the newly-download applications.

15
1.4. Dissertation Overview
This dissertation focuses on developing new methodologies, design automation and
optimization tools to support embedded NoC design while taking the user experience
information into consideration. The contribution of this thesis can be divided into two parts: 1)
DSE for full-custom embedded NoC with predictable system configurations and 2) user-
centric design methodology handling unpredictable system configurations. In what follows,
we summarize our contribution in these two directions.
1.4.1. DSE for Full-custom NoC with Predictable System Configurations
The first part of the dissertation addresses a new problem for system interconnect design
space exploration of application-specific MPSoCs supporting use-case applications where the
system configuration is given in advance. As a novel contribution, we develop an analytical
model for network-based communication fabric design space exploration and theoretically
generate fabric solutions with optimal cost-performance trade-offs, while considering various
design constrains, such as power, area, and wirelength. For large systems, we propose an
efficient approach for obtaining competitive solutions with significant less computation time.
The accuracy of our analytical model is evaluated via a SystemC simulator using several
synthetic applications and an industrial SoC design.
1.4.2. User-centric Design Methodology Handling Unpredictable System Configura-
tions
This second part of this dissertation focuses on developing a user-centric design
methodology for embedded systems targeting heterogeneous NoC platforms which support
multiple applications interacting with the system, i.e. unpredictable system configurations. In
order to expedite the user-centric concept into future embedded systems, we cover design

16
space exploration of heterogeneous NoC platforms, as well as the validation process to show
the robustness of the proposed flow (see Section 1.4.2.A). We further apply on-line
optimization processes with the goal of maximizing user satisfaction and the associated design
metrics (see Section 1.4.2.B).
1.4.2.A. DSE methodology for Heterogeneous Embedded NoC
As discussed in Figure 1.2, as opposed to the traditional design flow considering the task-,
resource-, or system-level optimization, our proposed methodology targets one level above,
namely, user-level design. More importantly, through analyzing the users’ interaction with the
system, we are able to provide more robust platforms for applications characterized with high
workload variation. Figure 1.8 outlines the proposed design methodology. Given collected
user traces from existing systems or prototypes, as well as the basic architecture and
application templates, a novel design methodology is proposed for building user-centric
heterogeneous embedded NoCs, which aims at minimizing the workload variance and allows
the system to better adapt to different types of uses. This methodology addresses the user
behavior analysis (including classification, similarity, and clustering problems), DSE for
automated NoC platform generation (including model learning problem), and potential
optimization (i.e. regression, reinforcement learning problems). More precisely, we apply
machine learning techniques to cluster the traces from various users into several classes, such
that the differences in user behavior for each class are minimized. Then, for each cluster, we
propose an architecture automation deciding the number, the type, and the location of
resources available in the platform, while satisfying various design constraints. Of note, as
shown with the “*” sign in this figure, five types of problems, i.e. classification, similarity,
clustering, regression, and reinforcement learning, are explored for use-centric embedded
systems design. More details about these five types of problems and related machine
learning techniques are surveyed in Appendix A.

17
We have performed multiple experiments on the real embedded system benchmark using
realistic user traces with the goal of minimizing the energy consumption under given price
constraints. With considering the user experience into the off-line DSE step, the system
platforms generated by our approach achieve about 30% computation energy savings, on
average, compared to the unique platform derived from the traditional design flow shown in
Figure 1.3; this implies that each system configuration we generate is highly suitable for a
particular class of user behaviors.
Figure 1.8 User-centric design flow for heterogeneous NoCs, including user behavior analysis,NoC architecture automation, and optimization process. Five types of problems with the “*”sign with their related machine learning techniques are surveyed in Appendix A.
User TracesArchitecture Template Application Template
User Behavior AnalysisClassification*, Similarity* & Clustering*
Cluster 1 Cluster k
user satisfactionsurvey
Light-weight Run-time Optimization Regression*, Reinforcement Learning*
excellent
good
fair
poor
Automated NoC Platform Design Space Exploration Learning a model*
...Trace Cluster 1 Trace Cluster 2 Trace Cluster kCluster 2
NoC Platform 1 NoC Platform 2 NoC Platform k...

18
1.4.2.B. Optimizations for NoC-based embedded systems
Having generated system platforms which exhibit less variation among the user behavior,
we explore extensible and flexible run-time resource management techniques that allow
systems to adapt to run-time stimuli specific to different user behaviors. Our NoC-based
embedded systems support a diverse mix of large and small applications running
simultaneously. More precisely, we address the following three problems:
1. Energy- and performance-aware incremental mapping for NoC
Achieving effective run-time mapping on heterogeneous system is a challenging task,
particularly since the arrival order of the target applications is not known a priori. We
address precisely the energy- and performance-aware incremental mapping problem for
NoC-based platforms and propose an efficient technique with the goal of minimizing
the communication energy consumption of the entire system, while still providing
the required performance guarantees. The proposed technique not only minimizes
the inter-processor communication energy consumption of the incoming application,
but also allows for new applications to be added to the system with minimal inter-
processor communication overhead. Experimental results show that the proposed
technique is very fast and scales very well, and as much as 50% communication energy
savings can be achieved compared to the state-of-the-art task allocation scheme.
2. Fault-tolerant techniques for on-line resource management
Resource utilization and system reliability are critical issues for the overall computing
capability of multiprocessor systems-on-chip (MPSoCs) running a mix of small and
large applications. This is particularly true for MPSoCs consisting of many cores that
communicate via the NoC approach since any failures propagating through the
computation or communication infrastructure can degrade the system performance, or
even render the whole system useless. Such failures may result from imperfect

19
manufacturing, crosstalk, electromigration, alpha particle hits, or cosmic radiation, etc.
and be permanent, transient, or intermittent in nature. Therefore, the system
configurations become unpredictable under such non-ideal platform.
Given the above consideration, we are first to propose a system-level fault-tolerant
approach addressing the problem of run-time resource management in non-ideal NoC
platforms. The proposed application mapping techniques in this new framework aim at
optimizing the entire system performance and communication energy consumption,
while considering the static and dynamic occurrence of permanent, transient, and
intermittent failures in the system. As the main theoretical contribution, we address the
spare core placement problem and its impact on system fault-tolerant (FT) properties. At
the same time, several critical metrics are investigated for providing insight into the
resource management process. A FT application mapping approach for non-ideal NoC
platforms is then proposed to solve this problem. Experimental results show that our
proposed approach is efficient and highly scalable; significant throughput improvements
can be achieved compared to the existing solutions that do not consider possible failures
in the system.
3. User-aware dynamic task allocation
Users’ dynamic interactions with the system result in different system configurations,
which cannot be predicted and modeled at design time. Consequently, determining how
to react to run-time stimuli the system receives, while maintaining high performance is
a major objective of this dissertation. As novel contribution, we incorporate the user
behavior information in the resource allocation process; this allows system to better
respond to real-time changes and adapt dynamically to different user needs. In other
words, the technique is well-suited to be embedded in future products (cell phones,
PDAs, multimodal games, etc).

20
Several algorithms are proposed for solving the task allocation problem, while
minimizing the communication energy consumption and network contention resulting
from the same or different applications. We further present a light-weight machine
learning technique for boosting the user model at run-time. Experimental results
show that for real applications considering the real user behavior information and on-
line building the user model, we can achieve around 75.8% communication energy
savings compared to state-of-the-art task allocation scenario on the NoC platform.
1.5. Dissertation Organization
The OS-controlled NoC architecture, application model and the associated energy model
on the target embedded MPSoCs supporting one or multiple applications are first introduced
in Chapter 2. The full-custom NoC platform design with predictable system configurations are
explored in Chapter 3. Then, for platforms having unpredictable system configurations, we
present a new design methodology for automatic platform generation of future embedded
NoCs, while including explicitly the information about the user experience into the design
process (Chapter 4). Having generated system platforms which exhibit less variation among
the users’ behavior, in Chapter 5, we present the incremental mapping techniques for
supporting applications interacting with the embedded NoC platforms. Following that in
Chapter 6, considering more general platform scenarios, we address system reliability issue
and present FT application mapping techniques for the target platforms where permanent,
transient, and intermittent failures may happen in the system. In Chapter 7, while observing the
major variation coming from users’ interaction with the system, we explore flexible and
extensible run-time resource management techniques that allow system to adapt to run-time
stimuli specific to each class of user behaviors; these techniques can change dynamically
according to the user model built based on user needs.

21
Following these off-line DSE and on-line optimization techniques for user-centric
embedded systems, we summarize our contributions and discuss some interesting open
problems in user-centric design in Chapter 8. Finally, we study related machine learning
techniques helping user-centric embedded system design in Appendix A. In Appendix B, the
integer linear programming (ILP) model is built for investigating critical factors on system
performance, where the conclusion has been used for supporting the run-time resource
management optimization as explained in Chapter 6 and Chapter 7.

22

23
2. EMBEDDED NOC PLATFORM CHARACTERIZATION
In order to better illustrate the methodologies, algorithms and ideas of user-centric
embedded NoC designs developed in this dissertation, the platform characterization and user
traces descriptions are needed. This chapter first provides a discussion of the suitable NoC
platform for handling predictable and unpredictable system configurations, respectively.
Finally, the application and energy models reflecting the user traces are described.
2.1. NoC Architecture
NoC represents a novel communication paradigm for systems-on-chip [47][134]. The
NoC solution brings networking approach to on-chip communication and provides notable
improvements in terms of performance, scalability, and flexibility, over the traditional bus-
based or more complex hierarchical bus structures (e.g. AMBA, STBus) [94]. In general, the
NoC architecture consists of multiple heterogeneous processors/resources and storage
elements interconnected via a packet switched network. For NoC platforms targeting on one
or several use-case applications resulting in a few and predictable system configurations, it is
necessary to discuss the design space exploration of NoC topology with several design
metrics, e.g. physical effects (SoC floorplan, total wirelength, maximum wirelength, area
overhead of interconnect fabrics), and other tight design parameters (application deadlines,
system performance, communication power consumption). More details for exploring the full-
custom NoC platform design are shown in Chapter 3.

24
From Chapter 4 to Chapter 7 in this dissertation, our target NoC platform supports multi-
processing where multiple applications are able to enter and leave the system dynamically,
resulting in unpredictable system configurations. Under such multi-processing paradigm with
various unpredictable system configurations, there is no way to customize the communication
architecture; instead, NoC with the regular topology (i.e. mesh, torus, ring) would be more
suitable. Although most of the work presented in this dissertation is applicable to other
topologies as we discuss when appropriate in the remaining chapters of this dissertation, we
assume our target NoC platform consists of multiple resources or processing elements (PEs)
interconnected by a 2-D H × W mesh network, as shown in Figure 2.1. The system can be
either homogeneous (i.e., identical PEs integration) or heterogeneous (i.e., consist of
different types of PEs or PEs operating at different voltage and frequency levels1). We
formulate the NoC platform in a generalized way, while illustrating the properties of
computation components, communication components, and the control scheme under such
platform.
• Computation components in NoC platform: Assume there exist n different types of
PEs/resources ri, i.e. r1, r2,..., rn RE having different computation capabilities CC(ri)
in the platform, where CC(r1) CC(r2) ... CC(rn)2. N(ri) represents the
number of resources of type ri in the platform. Therefore, the NoC-based MPSoC
platform can be characterized as Λ = (A, Ω(A)) where A = (N(r1), N(r2), ..., N(rn))
represents a resource set, capturing the number and the types of PEs integrated in the
1.The PEs operate at fixed voltage and frequency levels which are selected from a finite set (Vi, fi).When the voltage level of a PE is different from that of the network, mixed-clock first-in-first-out(FIFOs) need to be utilized. We also assume that the voltage/frequency assignment for PEs (or volt-age island partitioning problem) is already determined using an approach similar to the one pre-sented in [119].
2.We note that for some MPSoCs supporting memory intensive applications, i.e. video/audio, multime-dia, the location of PE in Figure 2.1 can be placed with a block of memory module if necessary.
∈
≤ ≤ ≤

25
platform while Ω(A) represents the precise location of each PE in platform Λ (i.e.
resource mapping).
• Communication components in NoC platform: The communication infrastructure
consists of a data network and a control network (shown as solid and dotted lines,
respectively, in Figure 2.1), each containing routers and channels connected to the PEs
via standard network interfaces (NIs). The data network delivers data packets among
PEs under a wormhole routing scheme [113], while the control network (i.e., the routers
and links represented by dotted lines in Figure 2.1) is used to move around the control
messages sending from the global manager (GM). The data and control networks are
separated to ensure that data in the data network does not interfere with the control
messages in the control network. For large NoCs, it is suggested to have multiple
Figure 2.1 Homogeneous or heterogeneous 2-D mesh NoCs with PEs andinterconnect via the data and control networks described in a generalized way.
PENI
PENI
PENI
...... ...
......
PENI
PENI
...
PENI
PENI ... PE
NI
NI
data networkcontrol network
memory
processingunit
controlunit
NIR
GMOS
R
R
R
R
R
R
R
R
R
16 bits
2 bits
NI: Network interface
R: Router
OS: Operating systemGM: Global manager
PE: Processing element
26
distributed managers, instead of one global manager, along with a hierarchical
control mechanism, similar to the cluster locality idea proposed in [110].
• Control schemes in NoC platform: At least one of the PEs acts as a GM, i.e., master
PE, operating under the control of an operating system (OS), while others can be
considered as slave PEs (see Figure 2.1); each of them is an independent sub-
system, including the processing core (control unit and datapath) and its local
memory. Of note, the real-time OS in our embedded system should be designed to
be compact and efficient. We assume that such OS supports non-preemptive multi-
tasking and event-based programming. More precisely, the OS provides predictable
and controllable resource management, which includes monitoring the user’s
behavior and making the task allocation/mapping decision only when new events
occur (i.e. an application enters the system); the slave PEs are responsible for executing
the tasks/jobs assigned to them by the GM.
Here, we first provide a more thorough description of the control scheme via GM and
control network. In addition, an accompanying discussion of the router micro-architecture
(arbitration, buffers, etc.) that handles the control network and its area overhead are then
included, as well as a complete energy estimation via simulation of the control network.
• Operation of the GM and the control network: The task of the GM is to continuously
track the status of the PEs (idle/available or used/unavailable) in the system. When an
incoming application Q enters the system, the GM runs our incremental mapping
process and makes the run-time decision for the incoming application Q. After the
mapping decision is taken, the necessary resources are allocated to the tasks of this
incoming application, and the application starts executing. Once the application Q
finishes its execution and leaves the system, the PEs assigned to the application Q send
their address back to the GM through the control network to notify the GM that they

27
become available. This way, the GM always knows the status of the PEs in the system
and can take further decisions for new applications. Therefore, we do not need a fully
connected network, but just a tree that accumulates the messages for the GM, where the
structure of it is equivalent to a broadcast tree obtained by reversing the direction of all
edges as shown in Figure 2.2(a). We note that the architecture of our proposed control
network is designed here for the specific purpose; other different types of control
networks can also be built into the platform for supporting different types of control
messages [164].
• Design of the control network: As shown in Figure 2.1, the control network has
limited connectivity requirements, and it is physically separated from the data network.
More precisely, these two networks do not share any circuitry, such as links or buffers.
• Area overhead of our proposed network: In terms of implementation, we employ the
router described in [94] for the data network. In order to evaluate the overhead of the
control network, we add extra buffers and a MUX/DEMUX pair to the existing router
outputcontroller
inputcontroller
inpu
tco
ntro
ller
oupu
tco
ntro
ller
outputcontroller
inputcontroller
Mux/Demux
inpu
tco
ntro
ller
oupu
tco
ntro
ller
arbiter
inputcontroller
ouputcontroller
5 X 5switch
(crossbar)
routingtable
GM
Figure 2.2 (a) The logical view of the control network. (b) The on-chip router micro-architecture that handles the control network.
(a) (b)

28
used for data network (see Figure 2.2(b)). After that, we implemented a 4 × 4 mesh
network using both the original routers and the modified routers. Finally, the designs are
synthesized using Xilinx ISE to evaluate the area overhead (see data in Table 2.1).
• Energy overhead of the control messages in the control network: In terms of the
energy overhead for delivering the control messages, we utilize the bit energy model
[170] which is the same metric used when dealing with data messages which will be
later explained in Section 2.3. The energy consumption for transmitting the control
messages is related to the location of the GM and the amount of control messages. As
mentioned before, the control network is used only to send the status information from
PEs to the GM. This status information includes the address of the PE and an extra bit of
information showing the PE is busy or idle. Therefore, the size of control messages is
dependent on the network size. For an W × H NoC, we only need bits
to decode the address of each PE. Obviously, the volume of the control messages is
much smaller than the volume of the data messages, which is usually in Megabytes per
second for embedded applications. Moreover, the architecture view of the control
network is much simpler than the data network, as described before. Consequently, the
control network is expected to have significantly smaller energy consumption compared
Table 2.1 Impact of adding the control network on area. The synthesis is performed for Xilinx Virtex-II Pro XC2VP30 FPGA.
# of slicesone router in ‘pure’ data network 392
one router in our proposed network 401area overhead 2.3%
4 × 4 mesh network with ‘pure’ data network 67374 × 4 mesh network with our proposed network 6891
area overhead 2.2%
2 W H×( )log
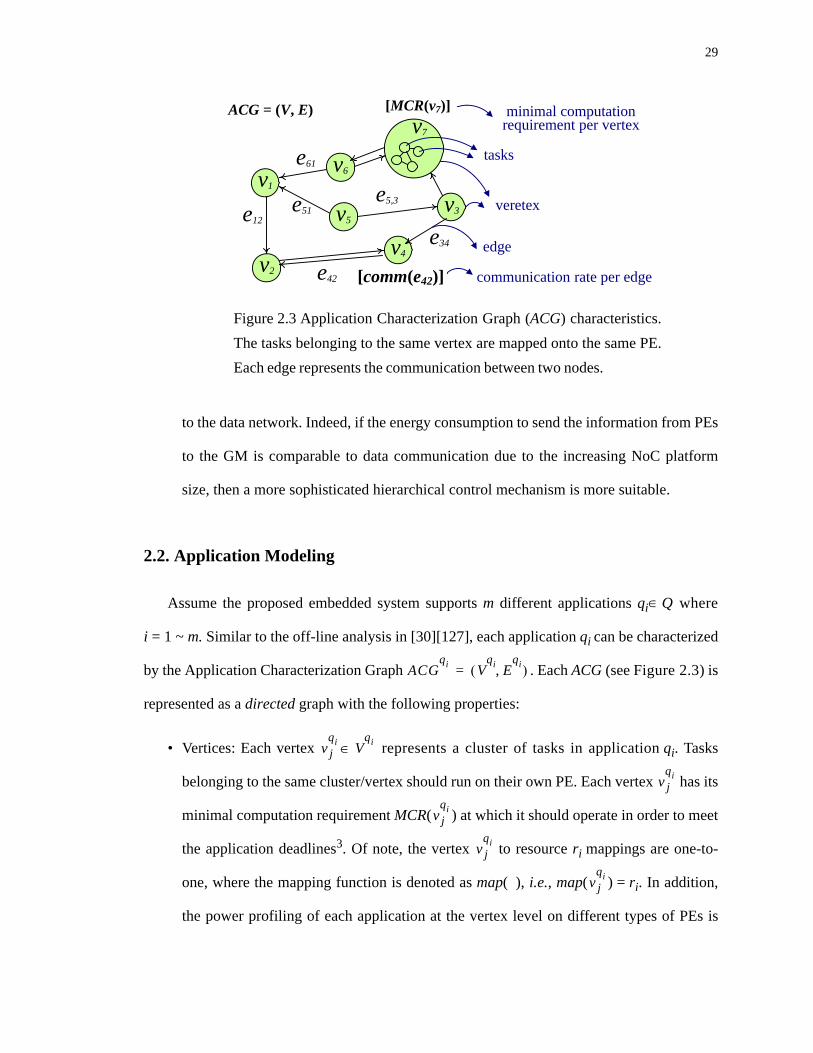
29
to the data network. Indeed, if the energy consumption to send the information from PEs
to the GM is comparable to data communication due to the increasing NoC platform
size, then a more sophisticated hierarchical control mechanism is more suitable.
2.2. Application Modeling
Assume the proposed embedded system supports m different applications qi Q where
i = 1 ~ m. Similar to the off-line analysis in [30][127], each application qi can be characterized
by the Application Characterization Graph . Each ACG (see Figure 2.3) is
represented as a directed graph with the following properties:
• Vertices: Each vertex represents a cluster of tasks in application qi. Tasks
belonging to the same cluster/vertex should run on their own PE. Each vertex has its
minimal computation requirement MCR( ) at which it should operate in order to meet
the application deadlines3. Of note, the vertex to resource ri mappings are one-to-
one, where the mapping function is denoted as map( ), i.e., map( ) = ri. In addition,
the power profiling of each application at the vertex level on different types of PEs is
∈
ACGqi V
qi Eqi,( )=
Figure 2.3 Application Characterization Graph (ACG) characteristics.The tasks belonging to the same vertex are mapped onto the same PE.Each edge represents the communication between two nodes.
veretex
tasks
communication rate per edge
ACG = (V, E)
e12
[comm(e42)]
e51
v1
v2
v3
v4
v5
e5,3
e34
v6e61
edge
v7
e42
[MCR(v7)] minimal computation requirement per vertex
v jqi V
qi∈
v jqi
v jqi
v jqi
v jqi

30
assumed to be available where represents the power
consumption, while vertex maps/executes on resource rk. Of note, for some
memory intensive applications, e.g. multimedia, a vertex can also be characterized as a
buffer or memory unit and needs to assign to the corresponding memory block in the
platform (see Footnote 2 in this chapter).
• Edges: Each directed edge in E characterizes the communication between
vertex and vertex , while weights comm( ) stand for the communication rate
(i.e., bits per time unit) from vertex to vertex .
2.3. Trace-based Energy Modelling
Multiprocessor embedded computing systems are always designed with the goal of
consuming less power. The trend of adding heterogeneity helps low the power demands while
maintaining performance. For a reasonable platform modeling, as seen in Section 2.1, we
have n different types of PEs with different computation capabilities in our NoC platform.
Here, a system-level energy modelling for such NoC-based MPSoC platform is presented. It is
worth to mention that as reported by the MIT RAW on-chip network, the communication
energy consumption represents 36% of the total energy consumption [20]. Therefore, in order
to achieve the accuracy of the high level system modeling, our proposed energy model covers
both computation and communication modules. We first formulate the user traces which are
recorded from relevant users over time and then describe for the computation energy model
and communication energy model, respectively, for such trace-based user patterns.
3.Note that, while dealing with the off-line task partitioning process, in order to meet the applicationdeadline, we use the worst case communication time for communications between nodes (i.e., lon-gest communication path). Moreover, we use the worst case execution time (WCET) for data-dependent tasks, where the WCET of a task is the maximum length of time that the task takes toexecute on a resource with certain computation capability.
P vjqi rk map vj
qi
⎝ ⎠⎛ ⎞=,⎝ ⎠
⎛ ⎞
vjqi
ejkqi E
qi∈
vjqi vk
qi ejkqi
vjqi vk
qi
31
2.3.1. User Trace Modeling
As we mentioned in Section 1.3.2, the best way for collecting the user traces is either from
the product prototype or from products belonging to an earlier generation of systems.
However, since such NoC-based products are rather difficult to have access to, we collect user
patterns/traces by monitoring the behavior of the Windows XP environment as users login and
logoff the system. By collecting real traces, as opposed to generate some traces based on
traditional distributions like heavy-tailed or exponential distribution, we are able to directly
capture the essence of human behavior while users interact with computing systems.
Before explaining the collected user traces, some terminology needs to be introduced. Let
[t1, App Q, t2] characterize an event where an application Q enters and then leaves the system
during a specific time period between two arbitrary moments in time t1 and t2. A session is a
sequence of events between a user signing in and out of a system. An episode is a discrete
period extracted from a session. The behavior of any user is defined as a set of consecutive,
overlapping events spanning a given period of interaction between the user and the system. In
order to learn the user’s behavior, it is desirable to examine long episodes, or even entire
sessions, as this would generate more accurate user data.
In our experiments, we collect multiple sessions from twenty users within three months.
Each session is represented as discrete time sequences sampled in 10 minutes4
collecting from user i while logging the system. Each element = {q1, q2,...} represents a set
of applications actively running in the system at discrete time t. For example, from the session
of user i,
4. Here we set 10 minutes for sampling the collected user traces at application-level with the consider-ation of reasonable simulation time for our experiments. For obtaining more accurate user interac-tion with the system, it is suggested to sample at higher rates, e.g. every minute, or to collect data atthread- or process-level.
ℜi ℜit⟨ ⟩=
ℜit

32
(2.1)
it is intuitive to see that at time 2, applications 2 enters the system and leaves at time 5.
Application 1 enters the system at time 1 and leaves at time 3, but later enters again at time 4,
etc. We can further obtain several events from this session, e.g. [1, App 1, 3], [2, App 2, 5], [4,
App 3, 8], [6, App 2, 7].
Therefore, by doing such an experiment, the collected information includes the detailed
time sequence of applications usage in the system; that is, we understand that “when
considering how many and which applications the user frequently accesses and for how long”.
Those traces will be utilized for later experiments discussed in Chapter 4 and Chapter 7.
2.3.2. Computation Energy Modeling
represents the computation energy consumption while running α onto
{β}, where α can be a vertex vi, an application qi, or a user trace , and {β} stands for a
resource set with one or multiple number of available resources able to run α. Assume
that the power consumption of each task running on certain specific resource is obtained
by off-line analysis and given in advance (as explained in Section 2.2),
can be obtained as a linear summation of the computation cost of running each vertex onto
the corresponding resources. Assume the duration of the trace α is from time 0 to ,
(2.2)
where is 1 if vertex vi is running on the system, 0 otherwise. Through this
dissertation, we are using embedded benchmark suite from [50] which profiled the codes
ℜi ℜi1 ℜi
2 ℜi3 ℜi
4 ℜ5, , , , i ℜi6 ℜi
7 ℜi8 …, , , ,⟨ ⟩=
q1{ } q1 q2,{ } q2{ } q1 q2 q3, ,{ } q1 q3,{ } q2 q3,{ } q1 q3,{ } q2{ }…, , , , , , ,⟨ ⟩=
Ecomp α β{ },( )
ℜi
Ecomp α β{ },( )
Tα
Ecomp α β{ },( ) P viqi rk map vi
qi
⎝ ⎠⎛ ⎞=,⎝ ⎠
⎛ ⎞ Δvi t( )
t 1=
Tα
∑⎝ ⎠⎜ ⎟⎜ ⎟⎛ ⎞
×vi in app qi or trace ℜi∀
∑=
Δvi t( )
33
of real embedded applications from EEBMC benchmarks (available at www.eembc.org)
onto several commercial processors and reported the power profiles for each vertex and
the corresponding graph for application qi, as well as the idle power for
each commercial processors.
2.3.3. Communication Energy Modeling
The communication energy modeling for NoC architectures have been explored in the
literature [170]. Ye et al. in [170] built the bit energy metric (with bit-level accuracy) for
modeling the energy consumption in a communication network. More precisely, it tracks
the dynamic energy consumed when transmitting one bit of data from the source to the
destination PEs through the whole network fabrics, including interconnect wires, arbiters,
input/output buffers, and crossbar for routing the data.
In this dissertation, we choose the bit energy model from [170] as it provides an efficient
approximation for the network fabrics under consideration with reasonable accuracy in
system-level of abstraction. For transmitting one bit through each network fabric component
(interconnect wires, buffers, etc.), we obtain the parameters from the Predictive Technology
Model (PTM) [129] which provides accurate, customizable, and predictive model files for
future transistor and interconnect technologies. We believe that with PTM, the modeling of
the system interconnect is accurate enough even before the advanced semiconductor
technology is fully developed. Here, we give the details of the communication energy
modelling for our NoC platform supporting worm-hole switching and minimal-path routing.
represents the total communication energy consumption of running α
(user traces recording the behavior of a set of applications over a finite period of time) on
the resource set {β} from time 0 to (the duration of user trace α), while vertices having
higher communication are assigned to PEs as closely as possible:
ACGqi V
qi Eqi,( )=
Ecomm α β{ },( )
Tα

34
(2.3)
where = 1 if application Q is active in the system between time t-1 and t, and
0 otherwise. The communication energy consumption of any application Q per time unit is
calculated as follows:
(2.4)
where is the communication rate of an edge in application Q (in bits per time unit),
and stands for the energy consumption to send one bit between the PEs where
vertices vi and vj are allocated to (in Joules per bit). More precisely,
(2.5)
The term represents the Manhattan Distance between the PEs where vertices vi and
vj are allocated to. The parameter stands for the energy consumed in routers, including
the crossbar switch and buffers, while represents the energy consumed in one unit link,
for one bit of data; these parameters are assumed to be constant obtained from the PTM
model.
We note that the parameters and would be different due to different circuit
design, post-silicon devices, wirelength and bandwidth, or even under different semiconductor
technology [129]. Here, we set them as fix values such that the overall computation and
communication energy consumption ratio is about 7:3, similar to the observation from the
MIT RAW on-chip network [20].
Ecomm α β{ },( ) EcommApp Q ΔApp Q t( )
t 1=
Tα
∑⎝ ⎠⎜ ⎟⎜ ⎟⎛ ⎞
×all applications
∑=
ΔApp Q t( )
EcommApp Q comm eij( ) EBit eij( )×
eij∀ E in App Q∈∑=
comm eij( )
EBit eij( )
EBit eij( ) MD eij( ) 1+( ) ERbit× MD eij( ) ELink×+=
MD eij( )
ERbit
ELink
ERbit ELink

35
3. SYSTEM INTERCONNECT DSE FOR FULL-CUSTOM NOC
PLATFORMS
3.1. Introduction
In the foreseeable future, it is expected that more computing resources will be integrated
into systems built at nanoscale. Consequently, the interconnect infrastructure plays a crucial
role for building truly scalable platforms [28]. For application-specific multi-processor
systems-on-chip (MPSoCs) supporting one or a few dedicated applications resulting in
predictable system configurations, customizing the computation and communication
architecture is needed in order to optimize various design metrics, such as power
consumption, throughput, area overhead, wirelength cost, etc.
Interconnect topology and protocol design are both critical steps while designing the chip
communication infrastructure. We note that most of the existing interconnect solutions are
developed to support a specific standard or in-house communication protocol [75]. In this
chapter, we propose a new approach which improves the system interconnect for data
transmission, while leaving the protocol untouched. This facilitates design re-use and
minimizes the design effort which are all critical to meet the tight time-to-market constraints.
Starting from these considerations, the goal of this chapter is to develop a new
methodology for system interconnect exploration, that allows designers to easily take
meaningful (system-wide) optimization decisions. More precisely, our approach optimizes the
data communication phase by replacing the bus-based interconnect with a NoC architecture,
while minimally altering the control phase of the communication protocol. In other words,

36
instead of providing a specific interconnect solution which satisfies the imposed design
constraints, the proposed approach explores a class of communication architectures
exhaustively, while considering the available floorplanning information [2][57]. As a results,
our approach can help designers find the Pareto-optimal solutions trading off power,
performance and other design metrics that account for various physical-level effects.
Due to the high resource reuse it enables, this hybrid approach can be easily integrated
into an up-to-date design flow in industry, as opposed to forcing a sudden paradigm change
towards fully NoC-based designs. To the best of our knowledge, this is the first attempt to
implement a hybrid communication model where the data phase (i.e. data transmission)
happens via the NoC approach, while the control phase from the original protocol design is
kept unchanged. Towards this end, our main contributions are as follows:
• The SIDE framework is proposed in an analytical manner for system interconnect
design space exploration, which allows a single run to explore multiple design points
that trade off various design metrics (e.g. average packet latency, area cost, wirelength).
The accuracy of the proposed analytical model is further validated using a SystemC
simulation model specifically developed for this work.
• To reduce the exploration complexity, we also propose a heuristic approach which
achieves three orders of magnitude reduction in runtime, while still providing high
quality solutions compared to the optimal solution.
• By taking the floorplanning information into account while enumerating various system
interconnect topologies, we are able to produce optimal placement of resources across
the communication fabric.
Taken together, these contributions represent an important step towards providing
designers an efficient analytical solution for system interconnect in application-specific

37
MPSoCs. Of note, the terms system interconnect and communication fabric, are used
interchangeably in this chapter.
The remaining of this chapter is organized as follows. In Section 3.2, we review the
related work. The general MPSoC platform with the related interconnect problem and design
space exploration flow are described in Section 3.3, while new optimization algorithms are
presented in Section 3.4. Experimental results in Section 3.5 show the accuracy and efficiency
of our system interconnect exploration under realistic benchmarks and an industrial case
study. Finally, we summarize our contribution in Section 3.6.
3.2. Previous Work
There exists a significant body of work on synthesizing and generating bus-based systems.
For instance, Sonics MicroNetwork [156] is a TDMA-based bus system handling different
access patterns, interrupt schemes of the intellectual property (IP) modules, while still proving
a high bandwidth. The STBus from STMicroelectronics is a flexible and high-performance
communication infrastructure based on shared buses and support for advanced protocol
features, such as out-of-order and multi-threading [160].
NoCs have been recently proposed as a promising solution to solve the scalability problem
in bus-based systems [17][47]. For application-specific NoCs, using the regular topology is
not always a good choice. Instead, topology selection and synthesis are becoming critical steps
in the design of an efficient communication architecture [107][168]. For instance, Yan et al.
propose greedy algorithms with Steiner-tree methods for reducing the NoC synthesis problem
[168]. The NoC synthesis problem considering physical effects, such as floorplanning and
wirelength, is discussed in [18][78][85][108][158]. Ascia et al. propose genetic approach for
NoC mapping problem considering multiple objectives [5]. In addition, other tools, such as

38
xpipes [85], NetChip [18], for NoC architecture automation and interconnect modeling
[9][120][170] are proposed for system-level communication optimization.
3.3. System Interconnect in MPSoC
3.3.1. General Framework for Application-specific MPSoC
Figure 3.1 shows a generic architecture for application-specific MPSoCs. As seen, such a
platform consists of multiple computing modules, i.e. general-purpose processor, graphics
processing units (GPU), Digital signal processor (DSP), intellectual property (IP), i.e. video/
audio processors, and related peripheral Input/Output (I/O) controller. These modules are not
only communicating with each other through the system interconnect, but also connected to
the off-chip memory and I/Os, such as universal serial bus (USB) devices, serial advanced
technology attachment (SATA), universal asynchronous receiver/transmitter (UART),
peripheral component interconnect (PCI).
Figure 3.1 Block diagram for a general MPSoC platform.
AudioProcessor
one or more levels of
cache
CPU
VideoProcessor
DSP
RISC
Others...
Display
system interconnectmemory controller
memory
others…
Wi-Fi
flash
UART
PCI
USB
SATA
Ethernet
Peripheral I/O controller

39
Traditional system interconnect uses the bus-based protocol which consists of two main
phases, namely a control phase and a data phase. A complete data transmission from a source
IP block to a destination block needs to complete the control phase first and only then the data
phase can proceed. The control phase follows the general handshake protocol (with VALID/
READY signals and exchanges of data packet information like data size, data priority etc.) to
ensure that the data are successfully transferred to/from buffer through the up-stream and
down-stream data buses, respectively.
The general platform with multiple IPs connecting with the system interconnect is shown in
Figure 3.2. In this representation, each IP block bi has only one input and one output port
denoted as “ini” and “outi”, respectively. The data packets are sent/received to/from the
communication fabric through the network interfaces. In general, the communication fabric
consists of multiplexers (mux), repeaters for transmitting packets over long links, links of
wire
other control circuits…
data bus
control bus
buffere.g. SRAM (on-chip), DRAM (off-chip)Scratchpad memory (SPM) …
multiplexer
set arbiter
repeater
IP block b0
IP block b2
out0
in0
out 3
in3
out2
in2
out |B
|-1
in|B
|-1
out 1
in1
system interconnect
IP block b|B|-1IP block b3
IP block b1
Figure 3.2 General platform with multiple IPs communicated via thesystem interconnect.

40
different widths, storage elements (e.g., elastic buffer memory, static random access memory,
scratchpad memory, dynamic random access memory, etc.), and other control circuitry (e.g.,
the arbiter). All signals in the control phase are managed by the system arbiter which drives
multiple data transactions and supports out-of-order transaction completion too. In addition,
each IP block of the platform can act as a master, slave, or both under such protocol. A master
initiates read or write (R/W) requests to the arbiter, while a slave can only respond to such R/W
requests from the arbiter. However, such a bus-based protocol is not scalable and becomes
easily a performance bottleneck as the number of IP blocks in the platform increases (i.e. ten-
plus IPs). Therefore, our idea is to keep the control phase (i.e. communication protocol) as it is
and build other communication fabric for data transmission among IPs. In addition, the system
arbiter is not only responsible for handling and scheduling the send or receive requests from
master or slave IP blocks, but also for setting up the path similar to circuit switching
techniques for data transmission on the proposed communication infrastructure. The problem
formulation for system interconnect is discussed next.
3.3.2. System Interconnect Problem Formulation
The system configurations are assumed to be predictable where may derive from one or
multiple use-case applications [105]. Similar to the application modeling in Section 2.2, the
use-case applications are decomposed into a set of communicating tasks via static analysis and
simulation and are characterized by an application characterization graph (ACG) = (V, E),
which is a directed graph where each vertex bi in B represents an IP block, while each directed
edge eij in E characterizes the communication flow from vertex bi to vertex bj. The weights
comm(eij) stand for bandwidth values (in bits per second) required for communication from
vertex bi to vertex bj. The system interconnect problem can be formulated as follows:

41
Given i) Floorplan of the system with information about placement regions or exact
locations for input and output ports, ii) the ACG and iii) design metrics and constraints (e.g.,
wirelength, area, power);
Objective - Explore a class of communication architectures that trades-off the system
performance and other design metrics, while meeting all the imposed constraints (i.e.,
maximum wirelength and communication fabric power-consumption overhead).
The high-level view of the interconnect synthesis problem with |B| = 4 IP blocks is shown
in Figure 3.3. Figure 3.3(a) explore the system interconnect trading off the system
performance and area/wirelength overhead, showing in left and right y-axis, respectively. As
shown, there are two extreme points in the design space. One left-most point illustrates the
system interconnect corresponding to a traditional bus for four IP blocks1: the data can be sent
from any source IP to the up-stream bus and then be stored in the buffers. Later on, once the
destination IP is ready for receiving data, the stored data can be delivered through the down-
stream bus to its destination IP. Such a communication model is simple and typically has a
low area and wirelength overhead (see Figure 3.3(b)). However, such a bus model will suffer
from poor performance and scalability issues when integrating more IP blocks in the system
since all data transmissions need to share the same wires (i.e. the up-stream and down-stream
buses).
Figure 3.3(c) plots the other extreme case, i.e. fully connected switches. Intuitively, the
system performance of such a model is much better than the one in Figure 3.3(b), since each
IP can communicate with any other IP, at any time, through its own mux without sharing it
1. In this chapter, a mux as in Figure 3.3 represents a switch with an arbiter so it has routing capabili-ties.
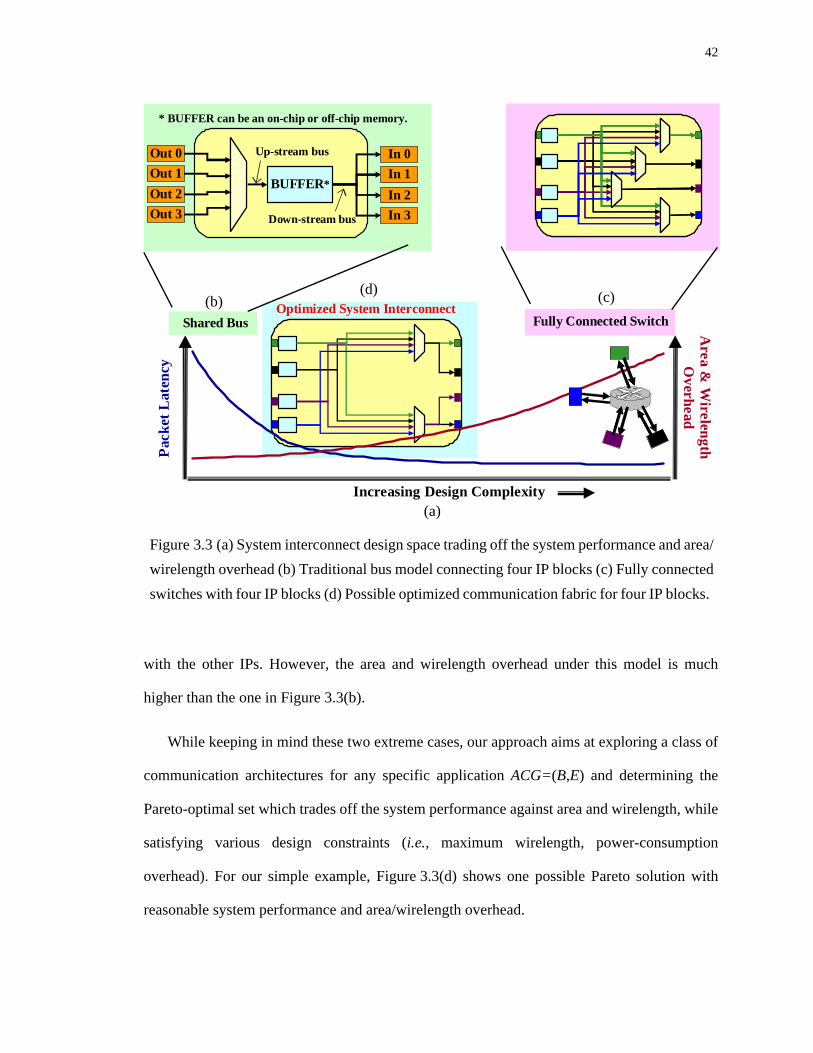
42
with the other IPs. However, the area and wirelength overhead under this model is much
higher than the one in Figure 3.3(b).
While keeping in mind these two extreme cases, our approach aims at exploring a class of
communication architectures for any specific application ACG=(B,E) and determining the
Pareto-optimal set which trades off the system performance against area and wirelength, while
satisfying various design constraints (i.e., maximum wirelength, power-consumption
overhead). For our simple example, Figure 3.3(d) shows one possible Pareto solution with
reasonable system performance and area/wirelength overhead.
Figure 3.3 (a) System interconnect design space trading off the system performance and area/wirelength overhead (b) Traditional bus model connecting four IP blocks (c) Fully connectedswitches with four IP blocks (d) Possible optimized communication fabric for four IP blocks.
Shared Bus
BUFFER*
In 0In 1
In 3In 2
Up-stream bus
Down-stream bus
* BUFFER can be an on-chip or off-chip memory.
Optimized System Interconnect
Pack
et L
aten
cy
Area &
Wirelength
Overhead
Increasing Design Complexity
Out 0Out 1
Out 3Out 2
Fully Connected Switch
(c)(d) (b)
(a)

43
The solution space of this interconnect problem, from a logical view, follows the |B|th Bell
number, also known as the set partitioning problem, where Bn is the number of ways that a set
of n elements can be partitioned into non-empty subsets [13]. For example, B4 = {(1234),
(1)(234), (2)(134), (3)(124), (4)(123), (12)(34), (13)(24), (14)(23), (12)(3)(4), (13)(2)(4),
(14)(2)(3), (23)(1)(4), (24)(1)(3), (34)(1)(2), (1)(2)(3)(4)}, i.e. elements 1, 2, 3, and 4 are
partitioned in 1, 2, 3, or 4 subsets. Also, it is clear that the interconnect in Figure 3.3(b), (c),
and (d) correspond to sets (1234), (1)(2)(3)(4), and (12)(34), respectively.
We note that the solution space grows rapidly, the time complexity being O(nlogn)n (B1-
B10 are 1, 2, 5, 15,..., 115975). In this work, we first propose an algorithm to cover the entire
design space for obtaining the Pareto-optimal solutions (Section 3.4.1); later on, we propose a
heuristic for larger systems to efficiently cover most of the Pareto-optimal solutions as
detailed in Section 3.4.2.
3.3.3. Communication Fabric Exploration Flow
The proposed communication fabric exploration flow for application-specific NoC is
depicted in Figure 3.4. Assume that the floorplan of IP blocks is given2. The inputs of our
flow are i) the I/O port locations (pl) for each IP block, ii) the application communication
graph (ACG) and iii) design constraints, D (e.g., maximum wirelength, maximum power-
consumption for the communication fabric) as shown in Figure 3.4. The modeling block
contains the performance analysis tool, optimal wirelength model in linear-time complexity,
and the fabric area model. Of course, it is also possible to include other models such as, power
[170], or even inductive coupling or crosstalk noise analysis [34] in this exploration.
2. In an industrial setting, this is often the case., e.g., a DDR controller should be near the edge, etc.Moreover, if there are un-placed IP blocks, a floorplanner tool, such as PARQUET [2], can beincluded to floorplan the chip as a pre-processing step.

44
With all inputs and the modeling library available, we explore a class of communication
fabrics and report the Pareto-optimal sets trading off selected design metrics, while satisfying
all design constraints (see the analysis stage in Figure 3.4). Without loss of generality, in the
rest of this chapter we assume that all the communication fabrics work under the same
operating frequency, although the proposed framework can be easily applied to fabrics with
multiple operating frequency settings throughout the chip by reflecting such a concern in the
performance analysis and wirelength models we can handle. In addition, the buffer sizing
problem and specific routing scheme can be further discussed after the communication fabrics
are decided [80][159].
As shown in the simulation stage of Figure 3.4, the netlists corresponding to the Pareto-
optimal sets are automatically generated and fed to the cycle-accurate SystemC simulator
Figure 3.4 The flow of the communication fabric design space exploration withthe analysis, simulation, and evaluation stages shown explicitly.
Constraints (area, power, maxwirelength, ...)
Regions of I/O ports of each IP
App. Comm. Graph (ACG)
Communication Fabric
Design Space Exploration
Evaluation Stage
performanceanalysis model
linear-time wirelength model
other models (power, etc.)
Pareto-optimal solutions
reconfigure mux/ wire connections
traffic generator
SystemC performance simulator with proposed comm. protocal
analysis plot
simulation plot
Simulation Stage
Analysis Stage
netlists
compare
fabric area model

45
specifically developed for this study. The simulator is used both to evaluate the Pareto-optimal
points found analytically and validate the accuracy of our analysis. Our simulator follows the
Intel® XScaleTM System Interconnect (XSI) like communication protocol, on-chip
interconnect for application-specific SoCs, for handling the multiple data transmission.
Finally, we evaluate the accuracy of analytical solutions by simulating them with the SystemC
simulator and comparing the analytical and simulation results, as depicted in the evaluation
stage in Figure 3.4).
3.4. Optimization of System Interconnect Problem
3.4.1. Exact System Interconnect Exploration
Our communication fabric exploration is based on a branch and bound approach. This
approach is capable of searching all solutions efficiently by walking through a tree structure.
For instance, Figure 3.5 shows an example of the tree structure needed to explore the
communication fabric solutions for a simple case with three IPs in the system. Assigning
different IPs to the communication muxes, allows us to explore different solutions. Two
extreme cases of the communication fabric are 1) assign each IP to a separate mux and 2)
assign all IPs to one single mux (see logical views in Figure 3.3(a) and (b), respectively).
As seen in Figure 3.5, the tree structure starts with the root node where no IPs are assigned
to any of muxes. At each level i, we assign IP bi to a different mux, denoted as an intermediate
node, by branching out from its corresponding parent node. For example, the branches of node
(1xx)(xxx)(xxx) at level 2, where IP b2 is placed into muxes 1, 2, and 3, result into nodes
(12x)(xxx)(xxx), (1xx)(2xx)(xxx), and (1xx)(xxx)(2xx), respectively. In addition, to speed up
exploration while keeping the optimality of the approach, we stop branching the nodes which
are isomorphic with other nodes in the tree. For example (see the “R” sign in Figure 3.5), the

46
nodes (1xx)(2xx)(xxx) and (1xx)(xxx)(2xx) are isomorphic, which implies that the solutions
branching out from node (1xx)(2xx)(xxx) are identical to those branching out from node
(1xx)(xxx)(2xx). Therefore, the node (1xx)(xxx)(2xx) is considered redundant in this case and
there is no need to further consider its children nodes in the solution space.
In addition, all nodes at level 3 are leaf nodes since all IPs have been assigned to muxes.
When reaching a leaf node, the expected average packet latency, total wirelength, area, and
power under the resulted mux structure are obtained using our analytical performance model,
optimal tree placer in [32], and the power model. If these results satisfy the design constraints
(e.g., the maximum wirelength in the fabric is smaller than a given value, and the power-
consumption overhead compared to a bus-based design does not exceed a threshold), we
Mux 1
X X X X X X X X X
Mux 2 Mux 3
1 X X X X X X X X
1 2 X X X X X X X
1 2 3
X 1 X X X X X X X
1 X X 2 X X X X X 1 X X X X X 2 X X
1 2 3 1 2 3
Example for 3 IPs
123
123
123
123
- Expected avg. latency- Total wire length- Fabric area
123
12
123
3
123
12
123
3
123
1
123
2
123
3
123
1
123
2
123
3
123
1
123
2
123
3
Level 0
Level 1
Level 2
Level 3
Figure 3.5 A three-IP example of communication fabricexploration using the branch and bound algorithm.
root node
intermediatenode
leaf node
redundant

47
check whether or not this solution belongs to the Pareto-optimal set. If yes, we include the
solution into the Pareto-optimal set and delete any solutions dominated by this one.
The branching process is applied in a recursive manner until all branchings hit level 3 or
stop at some intermediate level. The pseudo code of the branch and bound algorithm
implemented in a depth-first search manner is shown in Figure 3.6. Our solution structure is
listed in lines 01. The main search function of the tree structure is shown in lines 06-21. As
seen, at every iteration, we add one IP to a specific mux (line 06). When reaching a leaf node,
the expected latency, wirelength, area, and power are calculated and the solution is identified
as a Pareto point (lines 12-15). If we reach an intermediate node which is not redundant, we do
Figure 3.6 The pseudo code of the system interconnect explorationusing the branch and bound method.
Input: I/O port regions pl, ACG = (B,E), design constraints D, Output: Pareto-optimal set trading off metrics01 Solution S {latency, area, wirelength, power};02 MAIN PROCEDURE{03 Pareto-optimal ;04 Pareto-optimal = EXPLORE(1, 1);05 } EXPLORE(next_agent, next_mux){06 Solution S[next_mux].push_back(next_agent);07 IF (S is leaf_node)08 S.latency = estimate_latency(S, ACG);09 S.area = calculate_area(S, pl);10 S.wirelength = calculate_wirelength(S, pl);11 S.power = calculate_power(S, pl);12 IF (S satisfies constraints D)13 IF (S dominates solutions in Pareto-optimal)14 Pareto-optimal Pareto-optimal {S};15 delete_non_Pareto in Pareto-optimal;16 ELSE17 FOR (mux_ind = 1 to num_agent)18 IF(S is redundant_node)19 break;20 ELSE21 EXPLORE( next_agent+1, mux_ind ); }
∅←
← ∪

48
the depth-first search recursively to branch out this node by placing the next IP at different
muxes (see lines 17-21).
The estimate_latency function in Figure 3.6 (line 08) computes the average packet latency
for a given solution using a technique similar to the analysis presented in [120]. In short, we
first calculate the contention probability between each flow passing through the same
multiplexer. Then, we use these contention probabilities to find the approximate queuing
delays, as described in [120]. Similarly, the calculate_area and calculate_wirelength functions
in Figure 3.6 (see lines 09-10) are implemented using the technique presented in [32], while the
calculate_power function is estimated under predictive technology model [129].
In summary, for each mux with more than two inputs, we decompose the mux into a tree
structure and later apply the linear time optimal tree placement method in [32] to place each
decomposed mux. After all muxes are placed, the wirelength is calculated using the Steiner tree
method [168]. The corresponding area is the sum of all decomposed muxes, repeaters and
buffers for each mux structure and the corresponding power is the total power consumed on the
system interconnect components.
3.4.2. Heuristic for Speeding up System Interconnect Exploration
The run-time complexity of the above branch and bound algorithm grows exponentially
with the number of IP blocks in the system. Therefore, we propose a linear run-time heuristic
which can obtain solutions close to the ones in the Pareto-optimal set.
For solving the communication fabric optimization problem for |B| IP blocks, we generate
|B| solutions with number of muxes (num_mux) ranging from 1 to |B| (i.e. |B| class). The final
solution of this heuristic is obtained from the best solution among these |B| classes.

49
Figure 3.7 shows one class of the heuristic with two muxes for four IP blocks (i.e., |B|=4,
num_mux = 2). As shown in the figure, the structure starts with the root node where no IPs are
assigned to any mux (see level 0 in Figure 3.7). We first sort the IPs based on the total
communication bandwidth requirement ( ), and assume d1 >
d2 > d3 > d4. Later, at level i, we assign IP block di to each mux, as shown in Figure 3.7; that is,
at level i, we have a partial solution where IPs d1~di are assigned to muxes. Then, we apply
the performance analysis tool (explained in Section 3.4.1) to each intermediate node, i.e.
partial_latency function in Figure 3.7. The algorithm branches only along the node with the
better performance (i.e., lower partial_latency value). In order to deal with the sensitivity to
Mux 1
X X X X X X X
Mux 2Example for 4 IPs
Level 0
Level 1
Level 2
Level 3
X
X X X X X X Xd1 X X X d1 X X XX
branch only node 1 with prob. p if partial_latency(node 2) - partial_latency(node 1) < varpartial_latency(node 1)
d2 X X X X X Xd1 X X X d2 X X Xd1
d3 X X d2 X X Xd1 X X X d2 d3 X Xd1
Level 4 d4 d2 d3d1 d2 d3 d4d1
node 1 node 2
num_mux = 2sort order: d1>d2>d3>d4
node 3 node 4
branch only node 4 with prob. p if partial_latency(node 3) - partial_latency(node 4) < varpartial_latency(node 4)
Figure 3.7 The proposed heuristic for four IPs with the number of muxes set to 2.
intermediate node
leaf node
di comm eij( ) comm eji( )+[ ]j∀
∑=

50
system performance in partial_latency function, we accept the solution with a certain
probability p when its corresponding performance is within the variance var of the best
solution on that level. This process continues until reaching the leaf node (all IPs are assigned
to muxes) and start considering whether or not this solution belongs to the Pareto curve.
3.5. Experimental Results
3.5.1. Industrial Case Study
To evaluate the potential of our communication fabric exploration approach for a real
application, we apply this approach to an industrial SoC design, namely the Intel® media
processor CE 3100 [83]. For this example, we are given the number of IPs in the system, as
well as the application communication graph. In addition, the floorplan information of this
design and the locations of I/O ports for each IP are also known. We used an industrial process
technology for estimating the area, wirelength, and power on system interconnect. Through
system interconnect exploration, we report the Pareto-optimal set trading off performance and
two physical design metrics, i.e., area and wirelength, while satisfying the imposed constraints
such that the system designers can easily make meaningful system optimization choices.
We first apply the proposed exact exploration technique to find the Pareto-optimal set
trading off the average packet latency and communication fabric area (see Figure 3.8(a)) with
the power overhead constraints set to 0.15 (i.e. the power consumption of communication
fabric cannot be more than 15% of that of a bus-based implementation). This makes sense
since the power consumption of the communication fabric does not represent a big portion
from the power consumption of the entire system. Similarly, Figure 3.8(c) reports the Pareto-
optimal set trading off the average packet latency and communication wirelength.

51
In order to validate the accuracy of the analysis stage (see Figure 3.4), we take the
potential solutions in the Pareto-optimal set and simulate them using our SystemC simulator.
The simulation results of data in Figure 3.8(a) and (c) are shown in Figure 3.8(b) and (d),
respectively. Note that in our analysis model (Figure 3.8(a) and (c)), we capture the high-level
system performance without implementing all the details of the communication protocol.
Therefore, the protocol related latencies such as set-up time, is not included in the analysis.
Since the relative accuracy is sufficient to make accurate comparisons between alternative
solutions, we show the normalize latency values in Figure 3.8. We note that the Pareto points
80 85 90 95 100 105 110
0.96
0.98
1analysis
90 100 110 120 130 140 150
0.94
0.96
0.98
1analysis
80 85 90 95 100 105 110
20
30
40
50simulation
90 100 110 120 130 140 150
20
30
40
50simulation
Figure 3.8 System interconnect exploration for a real SoC design. (a) Pareto-optimal set(latency vs. fabric area) obtained via analysis. (b) Simulation results for solutions in (a). (c)Pareto-optimal set (i.e., latency vs. fabric wirelength) obtained via analysis. (d) Simulationresults for solutions in (c).
(a) (b)
(c) (d)
3 muxes
1 mux (bus model)
3 muxes
1 mux (bus model)
3 muxes 3 muxes
1 mux (bus model)1 mux (bus model)
10.2%
5.3%
40%
40%
communication fabric area communication fabric area
wirelength wirelength
1
0.8
0.6
0.4
pack
et la
tenc
yno
rmal
ized
1
0.8
0.6
0.4
norm
aliz
edpa
cket
late
ncy
1
0.8
0.6
0.4no
rmal
ized
pack
et la
tenc
y1
0.8
0.6
pack
et la
tenc
yno
rmal
ized

52
are accurately captured by analysis. Later, in Figure 3.9, we also show that no actual Pareto
points are missed by analysis.
As seen in Figure 3.8, our proposed SIDE framework covers the entire design space
exploration of system interconnect, including the traditional bus model (one mux case or
signal bus) which is suffers from having a poor performance, but involves less fabric area and
wirelength. When compared against the one mux case (i.e. a single bus), the fabric with three
muxes (i.e., the highlighted circles in Figure 3.8) can achieve around 40% reduction in
communication latency with only 5.3% wirelength and 10.2% area overhead with respect to
the original single bus design. The power consumed by the system interconnect with a 3-
muxes implementation is about 8.16% higher than that of a bus-based implementation. Note
that the reported overhead in area and power is negligible with respect to the entire chip area
and power (below 0.1%). However, the communication latency improvement leads to
significant gains in system-level performance for multiple applications.
In addition, we plot the non-Pareto points to confirm that no candidate points are missed
out in our exploration process. After obtaining all solutions with the branch and bound
algorithm, we select forty points with a smaller fabric area and later report the real simulation
90 100 110 120 130 140 150
0.94
0.96
0.98
1
:: Non-Pareto points
Pareto-optimal set
90 100 110 120 130 140 150
0.94
0.96
0.98
1
:: Non-Pareto points
Pareto-optimal set
analysis
90 100 110 120 130 140 150
20
30
40
50
::Non-Pareto pointsPareto-optimal set
simulation
Figure 3.9 Forty non-Pareto points and Pareto curve plots obtained via analysis (a) andvia simulation (b).
(a) (b)communication fabric area communication fabric area
1
0.8
0.6
0.4
1
0.8
0.6
0.4
norm
aliz
ed p
acke
t lat
ency
norm
aliz
ed p
acke
t lat
ency

53
results for those points. The analysis and simulation results for Pareto-points, plus forty non-
Pareto points, are shown in Figure 3.9 (a) and (b), respectively. As shown in Figure 3.9(a), it is
easy to see that all points in the Pareto-optimal set (see cross signs) dominate all other forty
solutions (dot signs). It is worth mentioning that the forty points obtained from the analysis
stage are indeed dominated by the Pareto-optimal set in real simulation, as shown in
Figure 3.9(b); this demonstrates that our early-stage analysis is able to make good design
choices systematically.
3.5.2. Synthetic Applications for Larger Systems
We now evaluate the run-time and the solution quality of the branch and bound approach
(see Section 3.4.1) against the proposed heuristic (see Section 3.4.2). Four categories of
synthetic applications are generated, with complete floorplaning information about I/O
locations for each IP. Each category contains 10 applications with 7, 9, 11, and 13 IPs,
respectively.
Figure 3.10 shows the solutions obtained with the branch and bound approach and our
heuristic (displayed with dots and crosses, respectively) and their corresponding Pareto curves
for one synthetic application with 13 IPs. As seen in Figure 3.10, those two Pareto curves are
close even though three out of Pareto-optimal solutions are not obtained from the heuristic;
that is, points 7, 8, and 14 can be obtained using the proposed heuristic which are indeed in the
Pareto-optimal set (points 1, 2, 6). The degradation in quality of the heuristic solutions
compared to the optimal solutions is calculated as a difference in area between the solution
generated by the heuristic and an area of the Pareto-optimal solution with the closest (from
below) latency. For example, For example, the average area increase with respect to the exact
algorithm for all design points reported in Figure 3.10 is 2%.

54
As mentioned before, the branch and bound exploration is exponential in nature. The run-
time overhead for exploring the system with 7, 8, ... , 13 IPs is 40 ms, 55 ms, 70 ms, 310 ms, 3
s, 2 min, 40 min. For future MPSoCs with hundreds of IPs, there is a need of using the proposed
heuristic to explore the exponentially increasing design space. Figure 3.11 shows how our
heuristic performs compared to the branch and bound approach as the system size grows up
120 140 160 180
0.94
0.96
0.98
1
::::
solutions from branch and bound approachsolutions from heuristicPareto-optimal set (branch and bound) points 1-6Pareto set (heuristic) points 7-14
1
23
45 6
7
8
9
1011 1314
12
Figure 3.10 Solutions comparison between branch and bound methodand the proposed heuristic for system interconnect exploration of asynthetic application with 13 IP blocks.
nor
mal
ized
pa
cket
late
ncy
communication fabric area
1
0.8
0.6
0.4
Figure 3.11 Run-time and solution quality comparison between branch and boundapproach and our heuristic as the system size scales up.
6 8 10 12 140
0.5
1
6 8 10 12 140
1
2
3 x 104
system size (# of IPs) system size (# of IPs)
spee
dup
degr
adat
ion
in q
ualit
y(h
euris
tic/b
ranc
h an
d bo
und)
(bra
nch
and
boun
d/he
urist
ic)
55
(four categories with the number of IP set to 7, 9, 11, and 13). For the heuristic, the parameter
iter, variance var, and probability p are set to 30, 0.3, and 0.5, respectively. For a system
consisting of 11 IPs, our heuristic runs 1800 times faster than the branch and bound algorithm,
on average. Meanwhile, the solutions obtained by the heuristic remain competitive as the
system size scales up.
3.6. Summary
In this chapter, we have addressed the problem of system interconnect exploration for
application-specific MPSoCs where the system configurations are predictable. As a novel
contribution, we have developed an analytical model for network-based communication fabric
design space exploration and theoretically generated fabric solutions with optimal cost-
performance trade-offs, while considering various design constrains, such as power, area, and
wirelength. For large systems, we have proposed an efficient approach for obtaining
competitive solutions with significant less computation time. The accuracy of our analytical
model has been evaluated via a SystemC simulator using several synthetic applications and an
industrial SoC design.
In the remaining of this dissertation, we will address the design space exploration for NoC
platforms where the system configurations are not predictable due to users interacting with
multiple applications within the system.

56

57
4. USER-CENTRIC DSE FOR HETEROGENEOUS NOCS
4.1. Introduction
As mentioned in Chapter 3, for systems resulting in predictable system configurations, the
traditional Y-chart flow (see Figure 1.3) works well; however, for future embedded systems,
most likely, we will have multiple applications interacting with the system, which results in
unpredictable system configurations. Since such application interaction is due to the end user
behavior, therefore, by analyzing the user interaction with the system, we are able to provide
more robust platforms for applications characterized by high workload variation and
unpredictable system configurations.
In order to consider the end user behavior into the DSE, in this chapter, our user-centric
design methodology relies on collecting user traces from similar, existing systems or
prototypes (see Figure 1.8). The user trace modeling has been discussed in Section 2.3.1,
which captures what applications are running, at what times, in the system. The novel
contributions of our proposed DSE methodology are as follows:
• First, we target user behavior analysis. More precisely, we apply machine learning
techniques to cluster the traces from various users such that the differences in user
behavior for each class are minimized.
• Then, for each cluster, we propose an offline algorithm for automated architecture
generation of heterogeneous NoC platforms that deal explicitly with computation and

58
communication components and satisfy various design constraints, while facing
significant workload variations.
We note that by taking the user experience into consideration into the DSE methodology,
the generated system platforms exhibit less variation among the users’ behavior; this implies
that each system is highly suitable for a particular user cluster and therefore the overhead of
later applying various online optimization techniques can be reduced as well
[36][38][122][152][153]. In this chapter, however, we restrict ourselves to the offline
optimization part of platform generation, while follow up chapters will consider the run-time
optimization aspects (see Chapter 5, Chapter 6, and Chapter 7).
4.2. Related Work
In an early attempt, Dick and Jha propose a multiobjective genetic search algorithm for
co-synthesis of hardware/software embedded systems which trades off price and power
consumption [51]. Some design methodologies for automatic generation of architecture for
heterogeneous embedded MPSoCs were later studied in [7][100]. Different from the heuristics
used to handle a large design space, Ozisikyilmaz et al. propose a predictive modeling
technique to estimate the system performance by looking at information from past systems
[121]. More recently, Shojaei et al. propose a BDD-based approach to efficiently obtain
Pareto points which help multi-dimensional optimization [150]. Instead of using the bus-
based communication, Chatha et al. address the automated synthesis of an application-
specific NoC architecture with optimized topology [31]. However, their approach targets
single application characteristics (i.e., the communication trace graph is fixed) which is
not realistic to use for different users. Murali et al. consider multiple use-cases during the
NoC design process [106]. However, they optimize the NoC using only worst case
constraints. In reality, the distribution of use-cases for various users are very different.
59
Gheorghita et al. presented a generic and systematic design-time/run-time methodology
for handing the dynamic nature of modern embedded systems, so-called system-scenario-
based design [63].
The differences in user behavior have been also elaborated. For instance, Kang et al. in
[86] observe the differences between younger and middle-aged adults in the use of
complicated electronic devices. Rabaey et al. in [132] discuss the wide range of workloads of
the future and advocate for new metrics to guide the exploration and optimization of future
systems, such as the user functionality, reliability, composability. To our best knowledge, we
are the first to take the collected user traces as input into DSE for building MPSoC platforms,
where their system configurations (i.e. system scenarios, use-cases) are not predictable at
design time.
4.3. Preliminaries
In this chapter, we give the details of the proposed user-centric design framework for
embedded NoC platforms. Later, we illustrate the detailed steps and related machine learning
techniques for off-line user-centric DSE, while targeting a generic platform of a system that
belongs to the third category in Table 1.1.
Our proposed user-centric design flow is shown in Figure 4.1. In order to take the user
behavior into consideration, the inputs of our design flow are:
• Architecture template, which consists of computation resources (e.g., FPGA, DSP,
ASIC), communication resources (e.g., router, FIFO, segmented bus), and the
communication protocol (e.g., routing/switching scheme). Of note, we focus only the
NoC platform on 2-D mesh topology and minimal-path routing, but the communication
architecture may be more general.

60
• Applications specification which captures the task graph characteristics (e.g., number of
tasks and communication rate between them), inter-application synchronization,
computation profile (e.g., power consumption, application deadlines).
• User experience which is based on data from users involvement through contextual
enquiry, prototype, and feedback from previous generation products (see
Figure 1.3(b)). This may include user traces, customer preferences, or other relevant
data.
The entire user-centric design flow involves several steps with the goal of generating
systems that meet the user needs. Here, we assume that the user needs in this case are to have
a system with low power consumption, but still able to maintain its basic performance. In
other words, our goal for the system design is to minimize the energy consumption, i.e. the
computation and communication consumption, per user.
Figure 4.1 The proposed user-centric design flow in terms of the off-line DSE processes.
- application charact.- QoS parameters
- comp. components- comm. components - storage elements
- contextual enquiry- prototype- legacy data & feedback
User ExperiencesArchitecture Template Application Template
Automated NoC Platform Design (see Section 3.4.2) 1. Computational resource selection
2. Resource location assignment
...Trace Cluster 1 Trace Cluster 2 Trace Cluster k
NoC Platform 1 NoC Platform 2 NoC Platform k...
Identification Content (IDC)
User Behavior Clustering (see Section 3.4.1) 1. Application usage similarity
2. K-mean clustering process

61
As mentioned in Section 1.3.2, we first need to understand the psychological, social, or
even ergonomic factors that affect the pattern of involvement of different users, in order to
classify the user behaviors. Then, we need to explore the problem of clustering the user traces
such that all users belonging to the same cluster have a similar1 behavior, while interacting
with the target system (see clusters 1 to k in Figure 4.1, details are discussed in
Section 4.4.1). Here, we assume that k is a given design parameter that can be determined by
market surveys or from previous design experience2. After knowing the involvement of users
into the same cluster, we can decide the architecture parameters (i.e., the number and type of
resources) under different design constraints/metrics (area, cost, etc.). Then, for building the
platform, we can follow the NoC platform automation process specific to this cluster of traces
(see Section 4.4.2). Later, we propose a validation process for this user-centric design flow in
order to assess whether or not the system can satisfy the involvement of users in that cluster
configuration (see Section 4.4.3).
To formulate the problem for off-line design, some terminologies are needed:
• ri : a resource of type i considered as the computation component in the platform (see
Section 2.1). Assume there exist n different types of resources, r1, r2,..., rn RE, N(ri)
represents the number of resources of type ri for the platform, while M(ri) represents
the price of resource ri.
• qi : an application with a set of tasks which are not shared with other applications. Each
application qi can be characterized as where the property details of
1. In terms of similar, it can be ‘frequency of accessing an application’, ‘time spent with each particularapplication’, etc. Through confirmatory factor analysis and model analysis, one can derive latentvariables (based on various observable behavior variables as listed above) that can be used to betterclassify users into categories (see the details in Section 4.4.1).
2. For example, for the non-shared systems that owned by certain person, k might be 5 or more, such asthe different models of the cell phones. However, for systems which are shared and used by severalpeople at a time, the universal design (k = 1 or maybe 2) that are usable and effective for everyone issufficient.
∈
ACGqi V
qi Eqi,( )=

62
each application has been described in Section 2.2. Assume there exist m different
applications which can run on the platform, i.e., q1, q2,..., qm Q. Each vertex has a
sets of resources which can only be mapped to in order to meet the application
deadlines, i.e. { } where ri , MCR( ) CC(ri).
We note that the computation/communication energy modeling for a specific user trace
have been characterized in Section 2.3.
4.4. The Problem and Steps for DSE
4.4.1. User Behavior Similarity and Clustering
As mentioned in Figure 1.1, because the variation of user behavior interacting with the
system is quite high and in order to satisfy most of the users through off-line DSE, we need to
classify the user behaviors before clustering the user traces such that the users belonging to the
same cluster would have a similar behavior while interacting with the system. Keeping the
goal of minimizing the energy consumption, we need to observe how users interact with the
system, i.e. how many and which applications the user often uses and for how long. In
addition, each application has different resource requirements and power profiles so extracting
this kind of information is crucial for later customizing the design process.
Here, we define some terms specifically in order to figure out how similar the traces from
users are in a quantitative way; the steps of user behavior clustering process are later explained
in Figure 4.2.
• Application resource demand (L): The degree of resource demands for an application.
The application qi which demands a larger number of resource of type rn has a higher
value.
∈ v jqi
vjqi map 1–⊆ REj
qi ∀ ∈ REjqi v j
qi ≤
Lrn
qi

63
• Inter-application similarity: Two applications requiring similar resources (i.e. having
similar resource demand) have a high inter-application similarity coefficient.
• Application appearance probability ( ): The probability of observing a subset of
applications, v, in user trace .
• Application-usage similarity: Two user traces reflecting a similar frequency of
application appearance (i.e. having similar application appearance probability) have a
high application-usage similarity coefficient.
• Subset function (F): If A is a subset of (or is included in) B, then F(A, B) = 1; otherwise
it is 0.
• Cluster mapping (C): C(i) = j indicates that i has been clustered into the jth group,
where i:C(i) = j represents all the elements in the jth group.
• k-MEAN clustering: The algorithm in [21] groups the objects (or data points) based on
attributes/features into k different groups, where k is a positive integer. The grouping
here is done by minimizing the sum of squares of distances between data and the
corresponding cluster centroid. The k-MEAN clustering algorithm involves three
important steps. First, k initial data points are randomly selected from the data set and
set it as the center if each cluster. Second, we do the re-assign process, i.e. assign other
data points to the closest center. Third, we do the re-center process, i.e. the centroid of
each of the k clusters are re-calculated. We repeat steps 2 and 3 until all these processes
converged (the centroid of each cluster is not changed anymore).
By applying the k-MEAN clustering approach, our goal is to cluster the users having similar
behavior interacting with the system into the same cluster. Each user can be treated as a data
point. The distance between users reflect the coefficient of inter-application and application-
pvℜi
ℜi

64
Figure 4.2 Main steps of user behavior clustering.
Input: task graph characteristics of each application qi , and the task-level computing cost, )Output: user behavior cluster S
• Step 1: Derive the Pareto curve trading off the resources and computation powerconsumption for each application qi (similar to the solution proposed in[51]). Each Pareto point gives the mini-mum power consumption for application qi.
• Step 2: Given all Pareto points, calculate , i.e. the resourcedemand for application qi to each resource type rj for j = 1,..., n, where
• Step 3: Normalize for each application qi.
where
• Step 4: Set each application as a data point di and apply k-MEAN clustering to groupall data points di into z clusters. Assign the center of each cluster, μr where r=1,..., z, to the identification content (IDCr) which will be utilized in the testingstage and define an z-dimensional application vector V = (v1,v2,...,vz) =(di:C(di)=1, di:C(di)=2,..., di:C(di) = z) capturing the applications within thecorresponding cluster.
• Step 5: Calculate for each user trace , i.e. the applicationsets appearance probability with corresponding application set vi for i = 1,..., z,where
• Step 6: Set from traces of each user as a data point di and apply k-MEAN clusteringto group data points di into k clusters. Assign the center of each cluster, μr’,where r’=1, ..., k, to the identification content (IDCr’) and generate a k-dimen-sional trace cluster vector S = (S1, S2, ..., Sk) = (di:C(di) = 1, di:C(di) = 2,...,di:C(di) = k), where Si is a group of user traces with high correlation applica-tion-usage similarity.
• Step 7: Assign μr’ to the identification content (IDCr’). Then, generate a k-dimensionaltrace cluster vector S = (S1, S2,...,Sk) = (di:C(di)=1, di:C(di)=2,..., di:C(di) = k)capturing the user traces within the corresponding cluster.
Gqi T
qi Eqi,( )=
Ecomp tjqi rk,⎝ ⎠
⎛ ⎞
Ecomp qi N r1( ) N r2( ) … N rn( ), , , ,( )
Lqi Lr1
qi Lr2
qi … Lrn
qi, , ,⎝ ⎠⎛ ⎞=
Lrj
qi
∑= =−
−==
))(max(
1 1
1
))]}(,...,)(),...,(,([
))](,...,1)(),...,(,([{j
i
j
rN
x njicomp
njicompqr rNxrNrNqEavg
rNxrNrNqEavgL
Lqi
Lqi Lr1
qi Lr2
qi … Lrn
qi, ,⎝ ⎠⎛ ⎞ Lr1
qi avg Lqi( )– … Lrn
qi avg Lqi( )–, ,⎝ ⎠
⎛ ⎞= =
avg Lqi( ) Lr1
qi Lr2
qi … Lrn
qi+ + +⎝ ⎠⎛ ⎞ n⁄=
Lqi
pvℜi pv1
ℜi pv2
ℜi … pvz
ℜi, , ,⎝ ⎠⎛ ⎞= ℜi
pvj
ℜi
F qk ql,{ } vj,( )qk ql,{ }∀ ℜi
t⟨ ⟩∈∑
ℜit⟨ ⟩∀ ℜi∈∑
pvℜi
------------------------------------------------------------------------------------------------=
pvℜi
65
usage similarities; the closer distance, the higher similarity coefficient. More precisely, as
shown in Figure 4.2, the clustering is achieved by first grouping together all similar
applications (i.e. applications in the same cluster vi have a high inter-application similarity,
see Steps 1-4), and then clustering the traces that use these application groups in a similar way
(i.e. traces in the same cluster Si have a high application-usage similarity, see Steps 5-7).
4.4.2. Automated NoC Platform Generation
From Section 4.4.1, we obtain the set of user traces which have a similar interaction with
the system. Here, for each cluster of traces, our goal is to generate an NoC platform (i.e., a set
of resources interconnected via a mesh-like network) which minimizes the energy
consumption. Therefore, the design automation process of our NoC platform involves two
critical steps: i) Computational resource selection, which decides the number and type of
resources needed to build the platform with the price constraint satisfied, and ii) Resource
location assignment, which provides the tile location for each resource in the 2-D tile-based
NoC. Of note, while running a user trace on any platform Λ, one can observe that applications
enter and leave the system dynamically. Here, we apply a greedy approach for the application
mapping problem; that is, based on the available resources of the platform, we assign vertex vi
to the currently available resources rj consuming the minimum amount of power. The vertex to
resource mappings are one-to-one and vice versa, where the mapping function is denoted as
map( ), i.e., map(vi) = rj. In addition, the price of each type of resource rj is defined as M(rj)
while the total platform price constraints is set to Φ.
1.Computational Resource Selection
Given all user traces in a cluster S, i.e., S and a price constraint Φ.
Find a resource set A which
∀ ℜi ℜit⟨ ⟩= ∈

66
minimizes (4.1)
such that: Φ (4.2)
vertex vx in S, map(vx) {REx} (4.3)
The steps for the computational resource selection problem are summarized in Figure 4.3.
In Equation 4.2, the sum of the prices of resources integrating in the platform is not
greater the price constraint Φ while Equation 4.3 guarantees that all application tasks
running on the platform would be assigned to the specific resources for meeting the
application deadline.
Main idea: We start out with an initial set of resources (A(0)) which minimizes our
objective without considering the price constraint (Step 1). The price constraints can later
Ecomp ℜi A,( )ℜi∀ S∈∑
⎩ ⎭⎨ ⎬⎧ ⎫
M ri( )ri∀ A∈∑ ≤
∀ ℜi ∈ ⊆
Figure 4.3 Main steps for computational resource selection.
• Step 1: initialize platform A with unlimited resources, find A(0)
which min and j 0.
• Step 2: While ( Θ(j) > Φ)•
find A(j+1) (..., N(rx)-1,..., N(ry)+1,...)
// replace rx with ry,where W(ry) < W(rx), which minimize the energy-price
cost ratio while all tasks still meeting application deadlines, i.e.
and j j+1
End While;
return A(j)
Ecomp ℜi A 0( ),( )ℜi∀ S∈∑
⎩ ⎭⎨ ⎬⎧ ⎫
←
M ri( )ri∀ A t( )∈∑ =
←
min
Ecomp ℜi A j 1+( ),( )ℜi∀ S∈∑ Ecomp ℜi A j( ),( )
ℜi∀ S∈∑–
M ri( )ri∀ A j( )∈∑ M ri( )
ri∀ A j 1+( )∈∑–
-------------------------------------------------------------------------------------------------------------------------------
⎩ ⎭⎪ ⎪⎪ ⎪⎨ ⎬⎪ ⎪⎪ ⎪⎧ ⎫
←

67
be met by replacing the more expensive resources with cheaper ones. Since there are at
most n × (n-1) pairs of possible replacements for a platform with n types of resources,
n × (n-1) evaluations are performed. Then, the replacement that results in the largest price
reduction and smallest computation energy consumption overhead is updated (Step 2) while
satisfying the Equation 4.3 requirement. We continue this step until the price of the updated
resource set satisfies the price constraint.
Example: Assume that we are building a platform with (W × H) = Q resources with the
templates of five different types of resources, i.e. r1, r2, r3, r4, r5 and r1 has the strongest
computational capability but with the highest price. The resource set A is defined as (N(r1),
N(r2), N(r3), N(r4), N(r5)). Under this case, in Step 1 we have A(0) = (Q,0,0,0,0). Then in
Step 2, if A(0)cannot satisfy the price constraint Φ (i.e. Q × M(r1) > Φ), then we replace one
resource with the lower price in the original set, i.e. (Q-1,1,0,0,0), (Q-1,0,1,0,0), (Q-1,0,0,1,0),
(Q-1,0,0,0,1) Find the next iteration resource set A(1) which has lowest price reduction but
with small computational cost overhead. We pursue this greedy approach until finding A(j)
which satisfies the price constraint Φ.
Complexity: Simply speaking, finding the solution space of the computational resource
selection problem is related to that of the integer permutation problem, i.e., finding a
set S = {(N(r1),N(r2),...,N(rn)) | N(r1) + N(r2) + ... +N(rn) = Q}, where the solution
size equals to (Q + n − 1)!/(Q! × (n − 1)!). However, using our proposed greedy approach,
we can obtain a reasonable solution about 60x faster compared to the exhaustive search time
(see experimental results in Section 4.5).
2.Resource Location Assignment
After obtaining the number and type of computational resources from the previous step,
our task becomes to allocate each resource to the tile-based NoC platform with the goal of
N∈

68
minimizing the communication energy consumption when all user traces for a certain cluster
are running in the system. The resource location assignment problem is formulated as follows:
Given all user traces in a cluster S, i.e., S and a W×H 2-D tile-based NoC3
with a resource set A that satisfies
, (W×H). (4.4)
Find a one-to-one resource location assignment Ω( ) from any resource ri in A to a
specific tile location, Ω(ri)=(xi, yi), which
min (4.5)
such that: 1 xi W, 1 yi H. (4.6)
To solve this problem, we need the following notation:
• B(xi, yi): The neighbors of tile (xi, yi), i.e., (xi+1, yi), (xi, yi+1), (xi-1, yi), (xi, yi-1), where
1 xi+1, xi-1 W and 1 yi+1, yi-1 H.
• Empty/Full tile: The tile (xi, yi) without/with a computational resource ri already
assigned to it.
• Transmission matrix ψ: Each entry ψ uv stores the aggregate communication rate
between resources ru and rv.
The steps for the resource location assignment problem are summarized in Figure 4.4.
Main idea: We start out by calculating and normalizing the transmission matrix ψ
(Steps 1-2). Then, by allocating two resources, ru and rv, with the highest ψ uv values as close
3. We believe that the dimensions of the mesh (W × H) or even the total number of resources for build-ing the platform should be determined by previous design experience rather than the outcome of thesynthesis step since it is related not only to system reliability (e.g., one can have spare cores in theplatform), but also to the manufacturing process, or even chip yield. Except for such factors, thevalues of W and H would be close to each other in order to minimize the communication costamong resources.
∀ℜi ℜit⟨ ⟩= ∈
ri∀ A∈ N ri( )i 1=
n
∑ ≤
Ecomm ℜi Ω A( ),( )ℜi∀ S∈∑
⎩ ⎭⎨ ⎬⎧ ⎫
≤ ≤ ≤ ≤
≤ ≤ ≤ ≤

69
as possible, we are able to minimize the communication energy consumption, while running
applications onto the system (Steps 3-5). More precisely, the neighboring resources of ru are
assigned based on the ratio ψui, for i = 1, ..., n, as shown in Step 4.
Complexity: Assume the user trace set is . The exhaustive resource allocation
assignment on a (W × H) = Q platform with the resource set (N(r1), N(r2), ..., N(rn)) is
. (4.7)
Our proposed heuristic can reduce such problem to the complexity of ( ),
where Steps 1 and 2 need to go through the user trace set once before generating
with size k × k. Later, in Steps 3-6, based on , we assign each resource in Q greedily
Figure 4.4 Main steps for resource location assignment.
• Step 1: generate an n×n transmission matrix ψ with each entry
ψ(u, v) = ψ uv =
where map(vj) = ru and map(vk) = rv
• Step 2: normalize the transition matrix ψ,
i.e., ψ uv
• Step 3: get u with largest ψuv or ψvu value, then set the location of ru , i.e. Ω(ru) = (xu,yu), to the center of the platform.
• Step 4: decide B(xu, yu) such that ri with greater ψui has a higher possibility to beassigned to B(xu, yu).
i.e., ψu1 : ψu2 : ... : ψun N(r1): N(r2): ...: N(rn), where r1, r2,..., rn B(xu, yu)
• Step 5: get a filled tile (xu, yu) with the greatest empty neighboring tiles.
• Step 6: repeat Steps 4 and 5, until all resources get assigned to the corresponding tilelocations in the NoC platform.
comm ejkqi
⎝ ⎠⎛ ⎞
ejkqi∀ Y
qi∈
∑qi∀ ℜi
t⟨ ⟩∈∑
ℜit⟨ ⟩∀ ℜi∈
∑ℜi∀ S∈∑
ψuv ψuvv 1=
n∑
⎝ ⎠⎜ ⎟⎛ ⎞
←
≈ ∈
ℜ
ℜ C N r1( )Q C N r2( )
Q N r1( )–× … C N rk( )
Q N r1( )– …– N rk 1–( )–××⎝ ⎠
⎛ ⎞×
ℜ= Q!N r1( )( )! N r2( )( )!× … N rk( )( )!××
---------------------------------------------------------------------------------------×
ℜ ψ Q×+
ℜ ψ
ψ

70
onto the corresponding tile locations in the platform. As shown in experimental results in
Section 4.5, we can obtain a reasonable solution about 4000× faster compared to the optimal
search time.
Of note, we focus only the NoC platform with 2-D mesh (W × H) topology, where W and
H are design parameters which can be determined by previous experience, as explained in
Footnote 3 of this chapter. In addition, minimal-path routing is selected as the switching
scheme through this chapter, but the communication architecture and routing scheme may be
more general. That is, our proposed resource assignment approach can be extended to
different topologies under different routing schemes, for instance, by redefining B(xi, yi)
which are the neighbors of tile (xi, yi) and giving some weight to B(xi, yi) which would capture
the distance (as determined by the topology and routing scheme) among the computational
resources.
4.4.3. Validation Process
Here, we validate the potential and robustness of our user-centric design flow (see
Figure 4.5). In this chapter, the system is defined as robust if it performs well not only under
ordinary/given cases (i.e. training dataset), but also under unpredictable/unknown cases (i.e.
testing dataset). Generally speaking, the training and testing datasets are usually given. The
training dataset is used to generate platforms under the user-centric design flow, while the
testing dataset is used to determine whether or not this design flow produces robust platforms
for different types of users. Theoretically, the user traces (see Figure 4.1) observed from an
older version of the platform, Dbefore, can be set as the training dataset in order to produce a
new generation platform. Then, we should take the user traces running on the new platform,
Dafter, as the testing dataset in order to validate the design flow. However, in practice, we
cannot have access to the later traces, Dafter, in advance. Therefore, if we have a reasonable
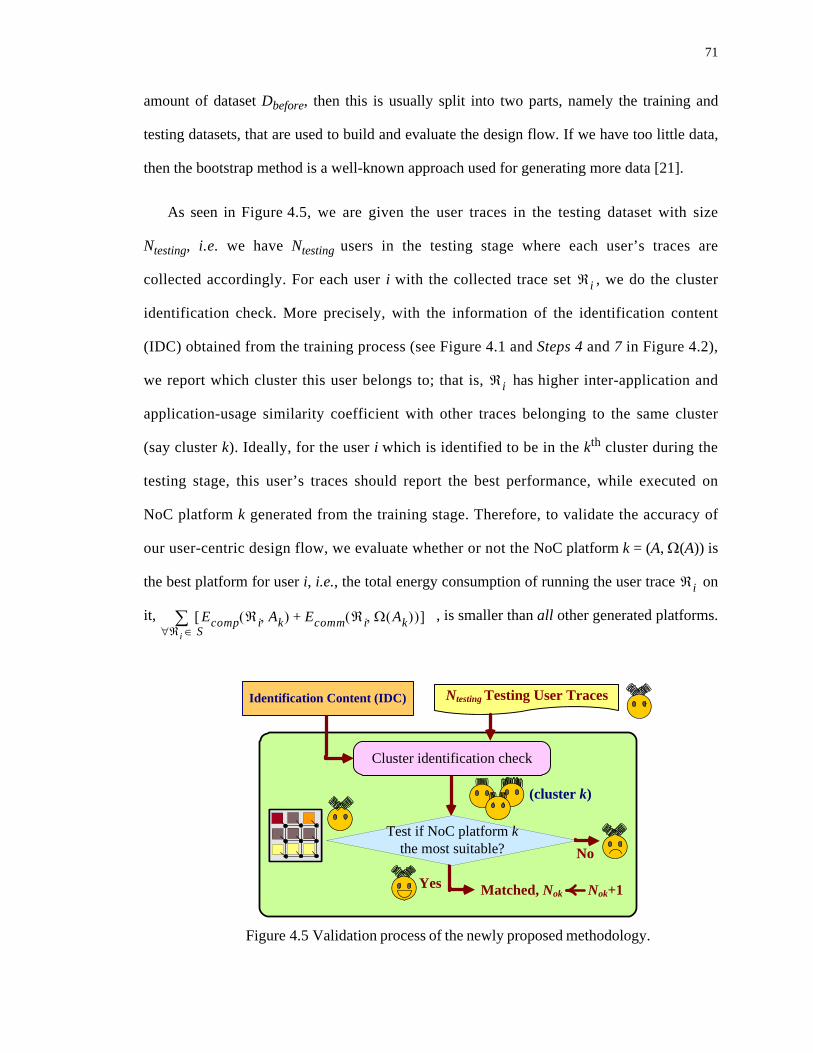
71
amount of dataset Dbefore, then this is usually split into two parts, namely the training and
testing datasets, that are used to build and evaluate the design flow. If we have too little data,
then the bootstrap method is a well-known approach used for generating more data [21].
As seen in Figure 4.5, we are given the user traces in the testing dataset with size
Ntesting, i.e. we have Ntesting users in the testing stage where each user’s traces are
collected accordingly. For each user i with the collected trace set , we do the cluster
identification check. More precisely, with the information of the identification content
(IDC) obtained from the training process (see Figure 4.1 and Steps 4 and 7 in Figure 4.2),
we report which cluster this user belongs to; that is, has higher inter-application and
application-usage similarity coefficient with other traces belonging to the same cluster
(say cluster k). Ideally, for the user i which is identified to be in the kth cluster during the
testing stage, this user’s traces should report the best performance, while executed on
NoC platform k generated from the training stage. Therefore, to validate the accuracy of
our user-centric design flow, we evaluate whether or not the NoC platform k = (A, Ω(A)) is
the best platform for user i, i.e., the total energy consumption of running the user trace on
it, , is smaller than all other generated platforms.
Figure 4.5 Validation process of the newly proposed methodology.
Ntesting Testing User Traces
Yes
Test if NoC platform k the most suitable?
Matched, Nok Nok+1
No
Identification Content (IDC)
(cluster k)
Cluster identification check
ℜi
ℜi
ℜi
Ecomp ℜi Ak,( ) Ecomm ℜi Ω Ak( ),( )+[ ]ℜi∀ S∈∑

72
If yes, it means that the user i passes the validation process and we label it as a match for
user i. Finally, the accuracy rate for our user-centric design flow, i.e., (Nok/Ntesting)×100%,
is reported where Nok is the number of user passes the validation process while Ntesting is the
total number of users in the testing stage. It is obvious that the higher the accuracy rate is, the
more robust the platforms are.
4.5. Experimental Results
To evaluate the user behavior model and the associated design flow, we apply our
proposed methodology to some real applications with realistic user traces. Our environment
and design inputs are as follows:
• Five different types of computational resources ri are available in the architecture
template; the corresponding processor model and its price (in U.S. dollars, USD), M(ri)
are listed in Table 4.1.
Table 4.1 Architecture template for the NoC platform.
• Seven applications are executed on the system platform, including two synthetic
applications generated by the TGFF package [162], Automotive/Industrial,
Consumer, Networking, Office automation, and Telecom from the embedded system
benchmark suite (E3S) [50]. Some pre-processing (such as task binding,
scheduling) is done for these seven applications, where task graphs have sizes 7, 7,
Resource Type, ri Part Number Price, M(ri)r1: DSP 300MHz TI TMS320C6203 112r2: RISC 266MHz IBM PowerPC 405GP 65r3: DSP 60MHz Analog Devices 21065L 10
r4: x86 μprocessor 400MHz AMD K6-2E 77r5: μcontroller 133MHz AMD ElanSC520 33

73
8, 6, 5, 4, and 6, respectively. Each task is going to execute on one resource later. In
addition, the task profile, the power consumption of running task ti on each
processor type, are analyzed beforehand under specified performance constraints.
• Hundreds of user traces (i.e., both training and testing datasets) are used to validate the
accuracy of the design flow. Realistic user patterns are collected the behavior of the
Windows XP environment from twenty users as users login and logoff the system. We
sample the patterns in about 10 minute for generating the traces; the bootstrap method is
later applied to generate even more traces [21].
Assume that, due to various incompatibilities, at most four applications can execute on the
platform simultaneously. In addition, based on data from market surveys or previous design
experience, assume that our goal is to generate three different platforms (i.e., parameter k is set
to 3) in order to satisfy different types of users. The price constraint for each platform is set to
1500 USD (i.e., Φ = 1500).
4.5.1. Evaluation of User Behavior Clustering
The clustering of user behavior is the most critical step in this design flow. Indeed, if the
user traces in the same cluster have a high variance in terms of the resource requirements, the
corresponding platform may not fit well most users in this cluster.
Figure 4.6 shows the clustering results. All feasible Pareto points are derived trading
off the price of the platform and the computation energy consumption. We randomly
select four users in each trace cluster and plot the corresponding Pareto curves. As shown
in Figure 4.6, the variation of users within the same cluster is quite small. We also
produce three resource sets (A1, A2, and A3) for these three trace clusters, while meeting
the price constraint (Φ = 1500). For example, for cluster 1, the resource set A1 consists of

74
3 resources of type r1, 6 of type r2, 6 of r3, 6 of r4, and 7 of r5, with the total price being equal
to 1479. As shown, these three resource sets (A1, A2, and A3) are quite different although their
prices are close to 1500.
Table 4.2 shows the normalized computation energy consumption of using these three
resource sets with each trace cluster. For example, for the second entry in second column,
the value 1.22 gives the computation energy consumption ratio of running all traces in
cluster 1 onto A1 and A2; that is,
: = 1 : 1.22 (4.8)
1250 1300 1350 1400 1450 1500 15500
1
2
3
4
5
6
7
8
9
10x 109
1250 1300 1350 1400 1450 1500 1550
10
9
8
7
6
5
4
3
2
1
0
x 109
users in cluster1
users in cluster2
users in cluster3
Figure 4.6 Pareto points showing the trade-offs between price and computationenergy consumption. For each cluster, four users are randomly selected and theirPareto curves are plotted.
A1 = (3,6,6,6,7)
A2 = (5,5,3,2,13)
A3 = (3,7,3,4,11)
price (unit: U.S. dollars)
com
p. e
nerg
y co
nsum
ptio
n (μ
J)
Ecomp ℜi A1,( )ℜi∀ S1∈∑
Ecomp ℜi A1,( )ℜi∀ S1∈∑
--------------------------------------------------------
Ecomp ℜi A2,( )ℜi∀ S1∈∑
Ecomp ℜi A1,( )ℜi∀ S1∈∑
--------------------------------------------------------

75
Of note, from Figure 4.6 and Table 4.2, we can conclude that the user-centric
methodology has the potential to separate the users having different behavior interacting
with the system quite effectively. In addition, by doing so, our platforms can be optimized
for each specific cluster of users with the goal satisfied.
Finally, we compare our proposed methodology against the traditional design flow which
generates only one platform, A’ (see the last row of Table 4.2), while optimizing the
computation energy consumption for the entire set of user traces, under the price constraint
Φ = 1500. As it can be observed, we achieve about 30% computation energy savings, on
average, compared to the unique platform, A’, derived from the traditional design flow.
4.5.2. NoC Platform Evaluation
We first evaluate the solution quality of the computational resource selection algorithm in
Section 4.4.2.I for traces with 200 users in the training dataset (Dbefore), against the best
solution which can be derived from the Pareto curve in Figure 4.6. The experiments are
performed on an AMD Athlon™ 64 Processor 3000+ running at 2.04GHz. Compared to
the optimal solution obtained from exhaustive search, our method consumes 5% more
computation energy, on average, for all these three clusters. However, it requires more than
10 hours to get the optimal resource sets for one cluster, while our algorithm takes only about
10 minutes to produce these reasonable platforms. Of note, for evaluating future systems in
Table 4.2 Computation energy consumption comparison for three trace clusters and different resource sets derived by the proposed and traditional design flow.
Resources Traces Cluster 1 Cluster 2 Cluster 3Set A1 1 1.47 1.35Set A2 1.22 1 1.33Set A3 1.33 1.28 1Set A’ 1.50 1.18 1.31

76
the market on millions of users, the proposed heuristic has the potential for producing
platform with industrial time-to-market constraints.
Next, we evaluate the solution quality of the resource location assignment algorithm
(Section 4.4.2.II) against the optimal solution, given a fixed set of resources running the
user traces. We observe that our method consumes only 7% more energy in
communication, on average, compared to the optimal resource location assignment but it
takes several seconds to process our heuristic, while hours for obtaining the optimal
solution.
To show the potential of our approach for larger platforms, we apply our proposed
approach to resource selection and allocation on 6 × 6, 8 × 8, 10 × 10 platforms using the
same settings shown in Table 4.1. Our approach has less than 7% computation energy
overhead and 5% communication energy overhead compared to the optimal solution for these
three platform settings. However, our solution can be obtained within 12, 15, 20 minutes,
while it takes about 40 minutes, 10 hours and more than three days to get the optimal solution
for 6 × 6, 8 × 8, 10 × 10 platforms, respectively.
4.5.3. Evaluation of Entire Design Methodology
Finally, we apply the validation process in Figure 4.5 (Section 4.4.3) to show the
potential of the user-centric design methodology. The size of training dataset ranges from 100
to 700 (we sample the collected user behavior in about 10 minutes as users login and logoff
this system), while the size of the testing dataset is fixed to 500. We observe that the accuracy
rate, (Nok/Ntesting) × 100%, increases as the size of the training data increases (for training
dataset size of 100, 300 and 500, the accuracy rate is 73%, 84%, and 87%, respectively).
By applying 700 training data for building these three platforms, we can have more

77
information for user behavior clustering and therefore, come up with a higher accuracy rate
(around 90%).
4.6. Summary
In this chapter, we have proposed a unified user-centric design framework for off-line
design space exploration (DSE) and on-line optimization techniques for embedded systems.
Our investigations target primarily heterogeneous multi-processor SoCs with resources
communicating via the NoC approach, but the approach is completely general and appropriate
to embedded systems design.
More precisely, in this new design methodology, we consider explicitly the information
about the user experience and apply machine learning techniques to develop a design flow
which aims at minimizing the workload variance; this allows the system to better adapt to
different types of user needs and workload variations. As shown, efficient algorithms have
been proposed for clustering the users’ behavior and automatically generating 2-D NoC
platforms such that the values of the total computation and communication energy
consumption are minimized, give specific design constraints. In addition, a validation process
for the proposed user-centric design flow has been proposed to show the robustness of the
framework. Although we focus on the architectures interconnected by 2D mesh networks with
minimal-path routing schemes, our user-centric design framework can be adapted to other
regular architectures with different network topologies or different deterministic routing
schemes.
Our experimental results using real applications have shown that by considering the user
experience into the design space exploration step, the system platforms generated by our
approach achieve more than 30% total energy savings, on average, compared to the single
platform derived from the traditional design flow; this implies that each system configuration

78
we generate is highly suitable for the targeted class of user and workload behaviors. Last but
not least, the problems addressed in this work are focused at the system-level, while future
work can cover the other levels of abstraction using a similar philosophy.

79
5. ENERGY- AND PERFORMANCE-AWARE INCREMENTAL
MAPPING FOR NOC
5.1. Introduction
Having generated NoC platforms which exhibit less variation among the users’ behavior
in Chapter 4, in this chapter, we concentrate on the dynamic resource management process
and present a robust algorithm for heterogeneous NoC-based MPSoCs. Here, we target real-
time applications described as task graphs (see the application modelling in Figure 2.3) as
opposed to general-purpose best-effort applications usually found in chip multiprocessors
(CMPs). As the target NoC platform discussed in Section 2.1, these applications are mapped
onto embedded MPSoCs where the basic architecture consists of homogenous PEs operating
at multiple voltage levels. More precisely, we assume that only the PEs connected to the NoC
have multiple voltage levels, whereas the network itself (including links, routers, etc.), is in its
own voltage-frequency domain. Of note, our proposed algorithm can also be applied to
platforms with different types of resources without any change with the given CC(ri) for each
resource ri.
A GM is responsible for system resource management which involves mapping the
incoming applications to the available PEs and handling the inter-processor communication
(the details of the control scheme related to GM shown in Section 2.1). Since the arrival order
and execution times of the applications are not known at design time (that is, applications
arrive at arbitrary times and leave the system after being executed), performing effective run-
time mapping is an important and challenging task. Towards this end, we propose a run-time

80
mapping technique which allocates the appropriate resources to the incoming application tasks
such that the communication energy is minimized, given some deadline constraints. At the
same time, all the pre-existing applications still run on the initial set of resources they have
been allocated to.
To illustrate the proposed methodology, we assume a system architecture with two voltage
levels as shown in Figure 5.1. The gray squares represent the PEs operating at higher voltage
levels, while the black dots show the tasks belonging to a pre-existing application which
cannot be reallocated. Applications App 1 and App 2 shown in Figure 5.1(a) and
pre-existing application
greedy solution(cost = 10 + 6 = 16)
proposed solution (cost = 10 + 7 = 17)
+ App
1 + App 2
greedy solution (cost = 10 + 6 + 12 = 28)
proposed solution (cost = 10 + 7 + 8 = 25)
assume (initial cost = 10) + App 2
1 2
4
5
3
76
1
4 5
7
6
23 1
4 5
7
6
23
1 2
4
5
3
76
1
2
3 6
5
4
1
2
3 6
5
4
+ App 1
vertexedge
1
2
5
3
6
4 7
App 1
1
2 5
3 6
4
App 2
Figure 5.1 Example of NoC incremental application mapping comparing the greedy and ourproposed solutions. The greedy approach which does not consider additional mappingsincurs higher communication overhead for App 2, and the system communication cost aswell, compared to our proposed solution.
(a) (b)
(c)
(d) (e)
(f) (g)

81
Figure 5.1(b), respectively, need to be mapped sequentially to the initial system configuration
in Figure 5.1(c). Suppose that vertices 4 and 6 are the critical vertices for App 1, while vertex
2 is the critical vertex for App 2; this means that they must be allocated to the PEs operating at
the highest voltage level in order to meet the application deadlines.
After the arrival of each new application App i, a greedy approach would map App i to the
NoC resources such that the inter-processor communication cost of App i is minimized for the
current configuration (that is, ignoring any future arrivals). In this simple example, the total
system communication cost is the sum of the communication cost of all applications; that is:
(5.1)
where MD(vi , vj) respresents the Manhattan Distance between any two application
vertices, vi and vj, connected to each other. As illustrated in Figure 5.1(d), even though the
greedy approach minimizes the communication cost for the current configuration, the newly
generated region consisting of the remaining (available) PEs is quite scattered. Consequently,
mapping any additional application onto this configuration would be ineffective, as it can be
seen for the non-contiguous region of App 2 in Figure 5.1(e).
As opposed to this, our newly proposed methodology does consider applications that may
arrive to the system at future times and consequently, it offers a more effective mapping in the
presence of dynamically incoming applications. Indeed, as shown in Figure 5.1(g), when
App 2 is mapped after App 1, the system communication cost becomes smaller than the cost
obtained using the greedy approach. Intuitively, since the pre-existing applications cannot be
reallocated, the performance of the greedy solution becomes much worse compared to our
proposed solution.
Note that the task migration approach is complementary to our incremental mapping;
indeed, task migration is an effective strategy to achieve load balancing and high resource
System communication cost MD vi vj,( )
i j,( )∀∑
App∀∑=

82
utilization. For distributed systems without shared memory support, the task migration policy
must be implemented by passing messages among PEs; the implicit migration cost is large due
to the need of moving the process context [19]. However, for embedded MPSoCs with shared
memory, we have two contexts to worry about from a migration perspective: The user context
(called the remote) and the system context (called the deputy or home node). Only the user
context (i.e. stacks, memory maps, registers of the process) needs to be migrated, while the
system context is kept either on the home node or in the shared memory. Therefore, the
migration process can be implemented with middleware support on top of the operating
system. In this chapter, we do not focus on the task migration process. Instead, we target an
incremental mapping process which does not need to change the current system configuration.
In summary, the novel contribution of this chapter consists of a new approach for dynamic
application mapping such that the total communication energy consumption in the system is
minimized. At the same time, additional applications can be easily added to the resulting
system with minimal communication cost overhead.
The remaining of this chapter is organized as follows: We first review the related work
(Section 5.2) and give an motivation example to highlight the key idea of our work
(Section 5.3). In Section 5.4, we formulate the problem of run-time incremental mapping and
present the proposed methodology. Then, we propose a two-step algorithm to solve this
problem; more precisely, the near convex region selection problem is discussed in
Section 5.5.1, while the vertex allocation problem is addressed in Section 5.5.2. The
experimental results appear in Section 5.6, while Section 5.7 summarizes our main
contribution.
83
5.2. Related Work
Resource allocation is a fundamental problem encountered in a variety of areas, including
processor allocation for supercomputers and task assignment in massively parallel processing
systems. While dealing with the resource management process, Karp et al. in [88] study the
problem of finding the shape of a region assigned to tasks for minimizing the pairwise
distance of all points within that region; they observe that there is no closed-form solution for
getting the optimal region. Bender et al. in [14] express the solution as a differential equation
to solve the resource allocation problem and provides a theoretical proof for getting the
optimal solution. Bender et al. in [15] present an approximate algorithm for selecting
processors such that to minimize the average number of communication hops in
supercomputers. Shojaei et al. in [151] present a pareto-algebra heuristic for finding multiple
feasible configurations trading off several design metrics, e.g. energy consumption, with the
resource usage for various types of resources at run-time.
In terms of the off-line resource allocation problem for NoC, several approaches have
been proposed. Hu et al. in [79] propose a branch and bound algorithm to map IP cores onto a
tile-based NoC architecture, while satisfying the bandwidth constraints and minimizing the
total communication energy consumption. The work in [104] considers the mapping problem
for minimizing the communication delay with split routing.
While dealing with the resource management problem for “multiple applications” in the
system, Pop et al. present an approach to incremental design of distributed systems for hard
real-time applications over a bus [130]. More recently, Murali et al. proposed a methodology
for mapping multiple use-cases onto NoCs, where each use-case has different communication
requirements and traffic patterns [105].

84
In terms of the on-line resource management for NoCs, the techniques proposed so far rely
on a resource manager operating under operating system (OS) control [117]. This OS-
controlled mechanism allows the system operate effectively in a dynamic manner. Smit et al.
[154] propose a run-time task assignment algorithm on heterogeneous processors. However,
the task graphs are restricted to have either a small number of tasks or a task degree of no
more than two. More recently, Carvalho et al. propose dynamic task mapping scheme in NoC-
based heterogeneous MPSoCs, targeting the channel load minimization for improving the
performance [27].
As such, all the previous work mentioned above does not maximize the system efficiency
by considering the possible addition of new applications. In this chapter, our goal is to
optimize the communication energy consumption for all possible system configurations (at
different time instances) considering that applications can dynamically arrive and leave the
system.
5.3. Motivational Example
We illustrate the incremental mapping process using three applications. For simplicity, the
system considered in this example has only a single voltage level. As shown in the optimal
mapping solution in Figure 5.2(a), whenever a new application arrives in the system, we
minimize the average communication distance for the incoming application and all existing
applications in the system. Applying the optimal mapping in practice would be infeasible
since the run-time for deciding the configuration which gives the optimal solution and
reconfiguring the previous applications by migrating tasks is too high. However, we can get a
significant insight from analyzing the results produced by an optimal solution. Indeed, by
looking at Figure 5.2, we observe that each application tends to cover a convex region, while
the PE utilization of the system increases. Therefore, if no task migration is allowed,
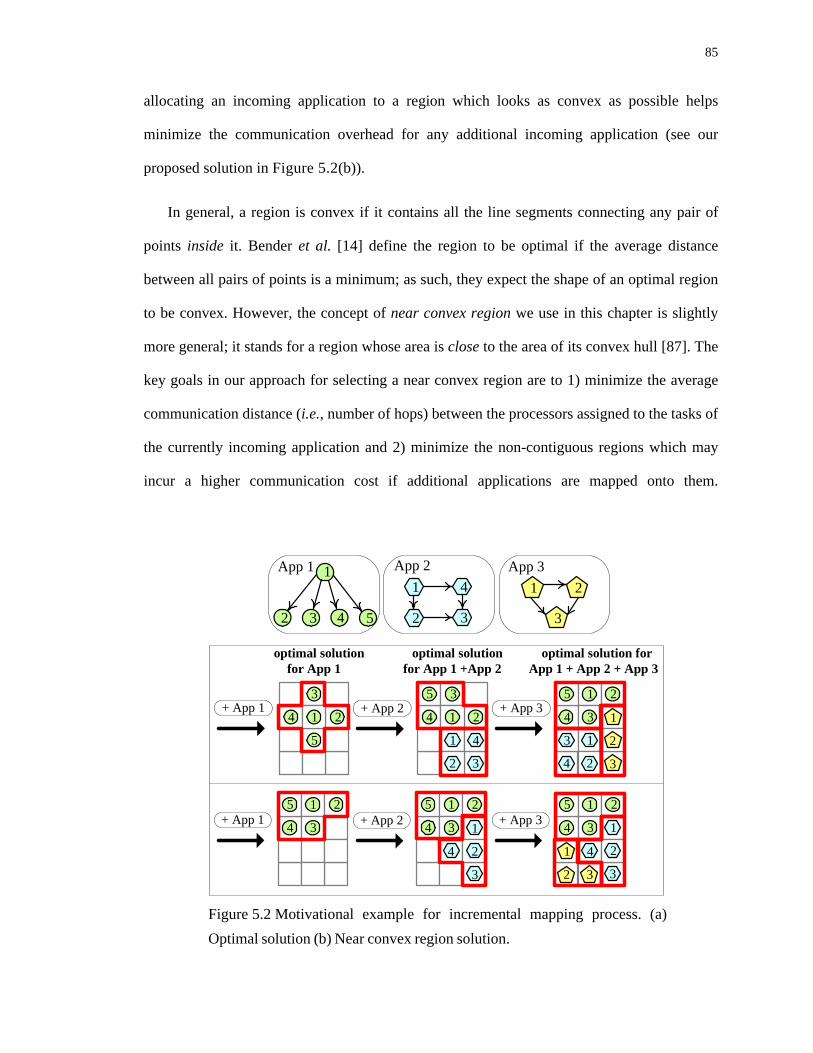
85
allocating an incoming application to a region which looks as convex as possible helps
minimize the communication overhead for any additional incoming application (see our
proposed solution in Figure 5.2(b)).
In general, a region is convex if it contains all the line segments connecting any pair of
points inside it. Bender et al. [14] define the region to be optimal if the average distance
between all pairs of points is a minimum; as such, they expect the shape of an optimal region
to be convex. However, the concept of near convex region we use in this chapter is slightly
more general; it stands for a region whose area is close to the area of its convex hull [87]. The
key goals in our approach for selecting a near convex region are to 1) minimize the average
communication distance (i.e., number of hops) between the processors assigned to the tasks of
the currently incoming application and 2) minimize the non-contiguous regions which may
incur a higher communication cost if additional applications are mapped onto them.
Figure 5.2 Motivational example for incremental mapping process. (a)Optimal solution (b) Near convex region solution.
optimal solutionfor App 1
+ App 1
optimal solutionfor App 1 +App 2
optimal solution for App 1 + App 2 + App 3
+ App 2 + App 3
+ App 1 + App 2 + App 3
2
3
11 24
5
3
1 25
34
1 25
34
1 25
34
1 25
341 24
35
32
41
24
13
2
3
1
32
412
3
1
4
1
2 3 4 5
App 1 App 2 App 31 4
2 3
1 2
3

86
Consequently, our problem formulation generalizes the optimal region considerations [14] for
dynamic system configurations with limited resources.
5.4. Incremental Run-time Mapping Problem
5.4.1. Proposed Methodology
Our proposed methodology is summarized in Figure 5.3. All applications are described
by ACGs which result from an off-line task partitioning similar to [30][127]. Our on-line
incremental mapping process is activated only when an application arrives in the system1. Our
objective is to first select a near convex region (see Section 5.5.1) and then decide on which
PE within this region should each vertex in the ACG be mapped to (Section 5.5.2), such that
the communication energy consumption is minimized under given timing constraints.
1. Of note, in this dissertation, we assume that each application is characterized by one fixed ACG.Therefore, as an application arrives, we realize the number of PEs for selection in order to meetdeadline. However, the application specification could be built more general by considering differ-ent modes of computation. For example, while executing multimedia applications, some users arealways in high-quality mode, but some in low-quality mode under difference situations. This modeprediction can be further captured in the user model, explaining in Chapter 7.
Figure 5.3 Overview of the proposed incremental mapping methodology.
App 2 App n...
Task Partitioning Process
ACGn...
update
System Utilization
(done by GM)
ACG2
on-lineoff-line
Near Convex Region Selection(see Section 5.5.1)
Vertex Allocation(see Section 5.5.2)
App 1
ACG1
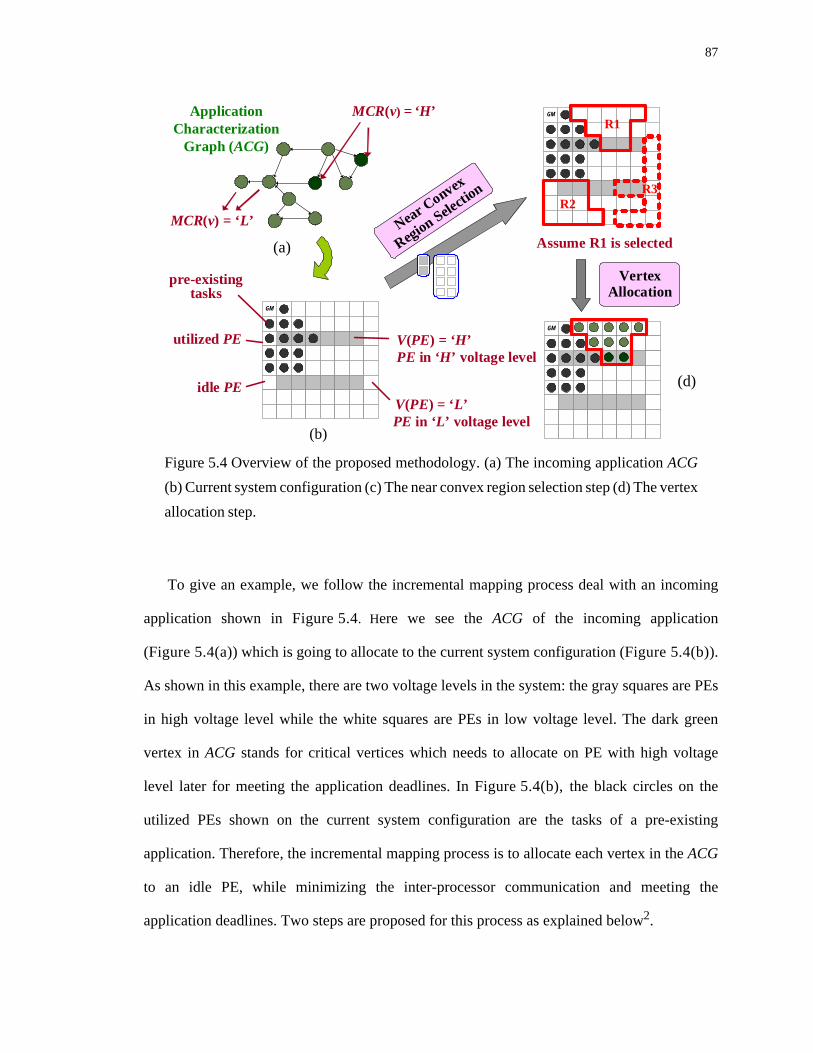
87
To give an example, we follow the incremental mapping process deal with an incoming
application shown in Figure 5.4. Here we see the ACG of the incoming application
(Figure 5.4(a)) which is going to allocate to the current system configuration (Figure 5.4(b)).
As shown in this example, there are two voltage levels in the system: the gray squares are PEs
in high voltage level while the white squares are PEs in low voltage level. The dark green
vertex in ACG stands for critical vertices which needs to allocate on PE with high voltage
level later for meeting the application deadlines. In Figure 5.4(b), the black circles on the
utilized PEs shown on the current system configuration are the tasks of a pre-existing
application. Therefore, the incremental mapping process is to allocate each vertex in the ACG
to an idle PE, while minimizing the inter-processor communication and meeting the
application deadlines. Two steps are proposed for this process as explained below2.
MCR(v) = ‘H’
GM
Assume R1 is selected
idle PE
utilized PE
Application Characterization
Graph (ACG)
GM
R1
R2R3
GM
MCR(v) = ‘L’
PE in ‘H’ voltage level
PE in ‘L’ voltage level
pre-existing tasks
Near Convex
Region Selectio
n
Vertex Allocation
V(PE) = ‘H’
V(PE) = ‘L’
Figure 5.4 Overview of the proposed methodology. (a) The incoming application ACG(b) Current system configuration (c) The near convex region selection step (d) The vertexallocation step.
(a)
(b)
(d)

88
1.The first step is to select a near convex region, that is, to select a region as convex as
possible. The region can be defined as convex if it contains all the line segments con-
necting any pair of its points [87]. That is, as arbitrarily connecting two points in that
region, the line segments should be inside the region. As shown in Figure 5.3(c), R1
and R2 are more convex than region R3; and all of them have at least two PEs at the
high voltage level. Selecting nonconvexity will incur much higher communication costs
for additional mapping. We address this issue in more details in Section 5.5.1. Here, we
assume R1 is selected in this example.
2.The second step consists of assigning vertices to PEs within the selected region (with
critical vertices mapped onto PEs with higher voltage levels), while minimizing the
inter-vertex communication. More details are shown in Section 5.5.2.
5.4.2. Problem Formulation
To formulate this problem, we need a few notations as follows:
• PEij: the PE located at the intersection of the ith row and jth column of the network. We
assume PE11 is the global manager GM3;
• V(PEij): the voltage level that processor PEij belongs to;
• MCR(vi): the minimal computation requirement at which it should operate in order to
meet the application deadlines;
2. For a larger NoC with multiple distributed managers, hierarchical control mechanism may beneeded, similar to the cluster locality approach proposed in [110]. Thus selecting a suitable clusterfor allocating the incoming application would be done before applying our two-step algorithm.
3. Of note, the location of the GM indeed affects the MD of PEs and GM and therefore slightly modi-fies the energy consumption of moving the control messages, as seen in Equation 2.5. However,compared to the energy consumes on sending the data messages, the difference of energy consump-tion on control networks is negligible. Here, we assume the GM is located at the top- and left-mostof the platform.

89
• MD(PEij, PEkl): Manhattan Distance (MD) between PEij and PEkl.
Using this notation, the problem of dynamic incremental mapping for NoCs can be
formulated as follows:
Given the current system behavior and the ACG of the incoming application
Find a near convex region R and a vertex mapping function map( ),
in R, with the objective:
(5.2)
such that .
5.4.3. Significance of the Problem
To prove that the MD metric in the problem formulation heavily affects the
communication energy consumption, we consider the following experiment. An ACG is
generated using the TGFF package [162]. Then we implement four scenarios for mapping this
application onto an 8 × 8 homogeneous NoC. Scenario 1 (S1) in Figure 5.5 uses our method,
scenario 2 (S2) uses the Nearest Neighbor heuristic proposed in [27], scenario 3 (S3)
randomly maps the application vertices inside a 4 × 4 rectangle region, while scenario 4 (S4)
randomly maps the application vertices onto any PEs in an 8 × 8 NoC. The x-axis in
Figure 5.5 represents the average MD between two vertices, while y-axis represents the
communication energy consumption normalized to that of the first scenario. As we can see,
minimizing the MD between application vertices is an effective way to minimize the
communication energy consumption of the applications.
vk∀ V map vk( ) PEij→,∈
min Energy w ei j,( )ei j,∀∑ MD map vi( ) map vj( ),( )×=
⎩ ⎭⎨ ⎬⎧ ⎫
vk∀ V V PEij( ) MCR vk( )≥,∈

90
5.5. Solving the Incremental Mapping Problem
5.5.1. Solutions to the Near Convex Region Selection Problem
When dealing with region selection problem for the incremental mapping process, we
need to minimize the communication cost of the incoming application and, at the same time,
minimize the communication cost overhead for any additional incoming application. To
generalize and formulate this problem, the L1 distance is defined as follows.
Definition 1: The L1 distance of a region R with N tiles, denoted as L1(R), is the total MD
between any pair of these N tiles inside R.
The scenario in Figure 5.6(a) covers the general case of the incremental mapping
problem. Such a scenario includes some pre-existing applications (i.e., the black circles in
Figure 5.6) running in the system, as well as a new incoming application which needs to be
allocated on the remaining/available PEs (these M PEs in the thick line region R are indicated
in Figure 5.6(a)).
0 1 2 3 4 5 6 70
2
4
6
8
Avg. Manhattan Distance between verticesCom
m. e
nerg
y co
nsum
ptio
n ra
tio
Figure 5.5 The impact of Manhattan Distance (MD) on communicationenergy consumption for four different scenarios (S1-S4).
S1S2
S3
S4

91
Assume that this incoming application requires N PEs (with N < M). Our objective is to
find a sub-region R’ with N PEs to assign to this incoming application which minimizes the
metric L1(R’) + L1(R-R’) as shown in Figure 5.6(b)4. Intuitively, it is difficult to consider
these two terms, L1(R’) and L1(R-R’), at the same time. In Section 5.5.1.A, we first focus on
minimizing the first term L1(R’) (we call this the L1 problem), which is a special case of the
general allocation problem. This gives us an insight into the problem of minimizing
L1(R’) + L1(R-R’) which is discussed in Section 5.5.1.B. Finally, in Section 5.5.1.C, the
region selection algorithm is proposed for NoC platforms with multiple voltage levels.
5.5.1.A Minimization of L1(R’)
Minimizing L1(R’) for a region R’ with N tiles is a special case of the general allocation
problem in [15]. To find a lower bound for L1(R’), we first implement the best-case solution to
conjecture the best shape of the region. Then, the worst-case solution in a contiguous region
for this problem is derived as the upper bound. Note that since the incremental mapping
process is done on-line, we need to look for near-optimal solutions with very low cost (i.e.,
4. Of note, if the workload for future applications is predictable, it is suggested to have weights onthese two terms, L1(R’) and L1(R-R’). Such idea is later explored at Chapter 7 while considering theuser behavior into the resource management process.
Figure 5.6 L1(R’) + L1(R-R’) minimization problem: select a region R’, such that the
sum of the total Manhattan Distance (MD) between any pair of tiles inside region R andthat inside region R-R’ is minimized.
(a) (b)
Minimize L1(R’)+L1(R-R’)
Select R’
|R| = M |R’| = N, |R-R’| = M-N
RR'
R-R'
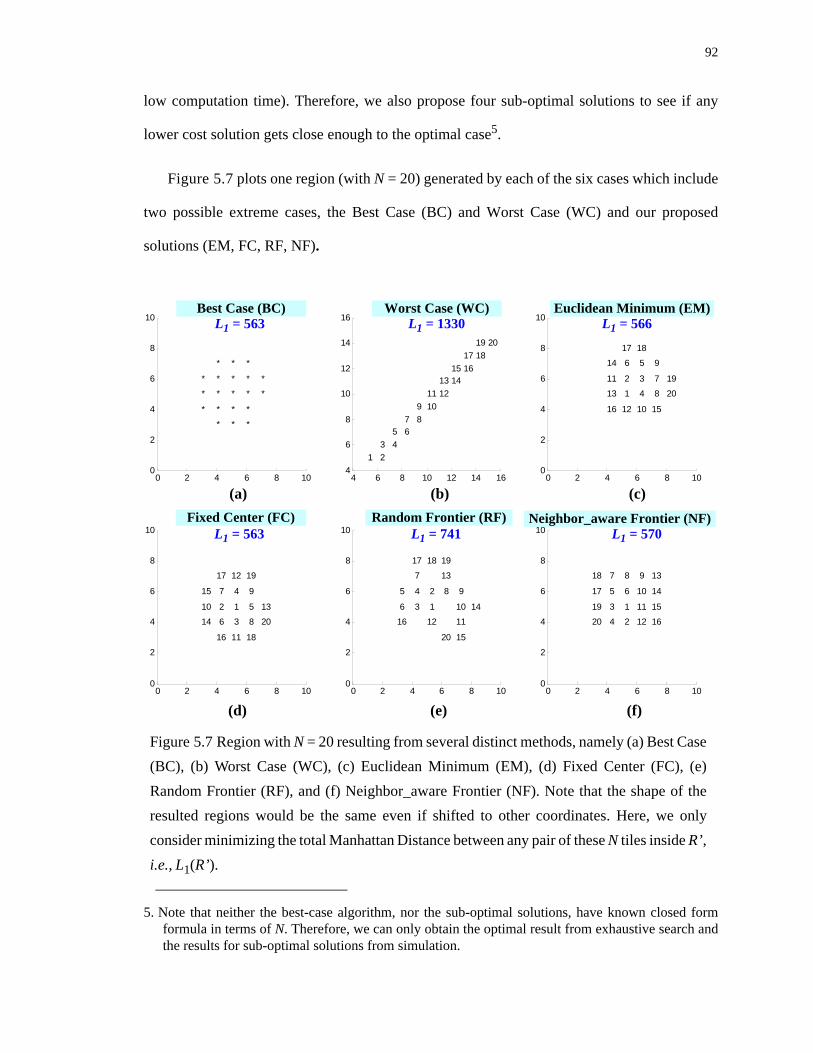
92
low computation time). Therefore, we also propose four sub-optimal solutions to see if any
lower cost solution gets close enough to the optimal case5.
Figure 5.7 plots one region (with N = 20) generated by each of the six cases which include
two possible extreme cases, the Best Case (BC) and Worst Case (WC) and our proposed
solutions (EM, FC, RF, NF).
5. Note that neither the best-case algorithm, nor the sub-optimal solutions, have known closed formformula in terms of N. Therefore, we can only obtain the optimal result from exhaustive search andthe results for sub-optimal solutions from simulation.
0 2 4 6 8 100
2
4
6
8
10Best Case
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
4 6 8 10 12 14 164
6
8
10
12
14
16Worst Case
1 2 3 4
5 6 7 8
9 1011 12
13 1415 16
17 1819 20
0 2 4 6 8 100
2
4
6
8
10Euclidean Minimum
1
2 3
4
5 6
7
8
9
10
11
12
13
14
1516
17 18
19
20
0 2 4 6 8 100
2
4
6
8
10Fixed Center
1 2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
0 2 4 6 8 100
2
4
6
8
10Random Frontier
1
2
3
4 5
6
7
8 9
10
1112
13
14
15
16
17 18 19
20
0 2 4 6 8 100
2
4
6
8
10Neighbor_awared Frontier
1
2
3
4
5 6
7 8 9
10
11
12
13
14
15
16
17
18
19
20
Neighbor_aware Frontier (NF)Random Frontier (RF)Fixed Center (FC)
Euclidean Minimum (EM)Worst Case (WC)Best Case (BC)
Figure 5.7 Region with N = 20 resulting from several distinct methods, namely (a) Best Case(BC), (b) Worst Case (WC), (c) Euclidean Minimum (EM), (d) Fixed Center (FC), (e)Random Frontier (RF), and (f) Neighbor_aware Frontier (NF). Note that the shape of theresulted regions would be the same even if shifted to other coordinates. Here, we onlyconsider minimizing the total Manhattan Distance between any pair of these N tiles inside R’,i.e., L1(R’).
L1 = 563 L1 = 1330 L1 = 566
(a) (b) (c)
L1 = 563 L1 = 741 L1 = 570
(d) (e) (f)

93
1. Best Case (BC): This corresponds to the optimal solution generated by an exhaustive
search but obviously this works only for moderate values of N.
2. Worst Case (WC): The closed-form solution for the worst-case of a contiguous region
R with N tiles:
L1(worst) (5.3)
Proof: The worst case of L1(R) with N tiles inside R is to place the fth tile to the resulting
region with distance N-k from the kth placed tile where f = 1 ~ N and k = 1 ~ f-1; that is,
L1(worst)
3. Euclidean Minimum (EM): While adding the fth tile into the region with f = 1 ~ N, the
EM heuristic updates the center, (xc , yc), by recalculating the arithmetic mean of f-1 tiles and
then selects a tile (x , y) with minimum Euclidean distance, , to the
updated center.
4. Fixed Center (FC): The 1st tile of the region is always set as the fixed center, (xc , yc).
While adding the fth tile into the region with f = 1 ~ N, the FC heuristic selects a tile (x , y)
with minimum Manhattan Distance, , to the fixed center.
5. Random Frontier (RF): While adding the fth tile into the region with f = 1 ~ N, the RF
heuristic randomly selects a tile from the frontier of the region consisting of N-1 tiles.
6. Neighbor-aware Frontier (NF): Every tile has four neighbors. The tile is considered to
be available, if it has not been selected into the region. While adding the fth tile into the region
R( )N N 1–( )× N 1+( )×
6----------------------------------------------------=
R( ) 1( ) 1 2+( ) … 1 2 … N 1–+ + +( )+ + +=
1( ) N 1–( )×= 2( ) N 2–( )× … N 1–( ) 1( )×+ + +
i N i–( )×i 1=
N 1–∑=
N N 1–( )× N 1+( )×
6----------------------------------------------------=
x xc– 2 y yc– 2+
x xc– y yc–+

94
with f = 1 ~ N, the NF heuristic searches the frontier of the resulted region and then selects a
tile with minimal number of available neighbors.
We should note that there exists more than one solution for these four cases (EM, FC, RF,
and NF), even for the BC and WC scenarios. Figure 5.7 shows a few concrete instances of
regions generated by each of the six cases for N = 20. The numbers on tiles in Figure 5.7(b)-
(f) represent the selection order when forming the regions. We initially set the tile (5, 5) as the
1st tile of the region.
As can be seen in Figure 5.7(a), the resulting shapes of BC are almost “circular”.
However, this solution cannot be applied to run-time incremental mapping due to its high run-
time overhead. For example, it take more than 40 minutes to get the optimal solution for
N = 20, while running on a Intel® Pentium 4 CPU with 2.60GHz. On the contrary, the EM,
FC, and RF heuristics take less than 10 μsec. We observe that for EM and FC cases, they
differ by less than 1% compared to the optimal solution (see Figure 5.7(c) and (d)). For the
RF case, there may exist holes inside the region and this would greatly increase the L1 distance
(e.g., for N = 20, 31.6% increase of the L1 distance compared to the optimal solution in
Figure 5.7(e)). In order to reduce the probability of getting holes inside a region, we propose
the NF heuristic which includes the neighbors information. Indeed, the solution produced by
the NF for N = 20 is only by 1.24% away compared to the optimal solution and it can be
obtained within 5 μsec.
To show the scalability of these heuristics, we need to test regions containing a large
number of tiles. The simulation results for the L1 distance under BC, and WC scenarios and
these four heuristics (EM, FC, RF, and NF) are shown in Figure 5.8(a). We plot the L1
distance from running 1000 experiments with N varying from 1 to 200 (see Figure 5.8(a)).
Since it takes more than 40 minutes to get the result for the BC if N = 20, we do not report

95
results for BC scenario when N is greater than 20 tiles. We do show, however, results for BC
when N varies from 1 to 20 (see Figure 5.8(b)).
From Figure 5.8(a), we observe that the results obtained from EM and FC cases are close
to each other. Of note, the NF heuristic has only 2.63% increase of the L1 distance compared
0 5 10 15 200
100
200
300
400
500
600Worst CaseEuclidean MinimumFixed CenterRandom FrontierNeighbor_aware FrontierBest Case
Figure 5.8 L1 distance results showing the scalability of the solutions obtained via the Best
Case (BC), Worst Case (WC) and four heuristics (EM, FC, RF, and NF).
0 50 100 150 2000
0.5
1
1.5
2 x 105
Worst CaseEuclidean MinimumFixed CenterRandom FrontierNeighbor_aware FrontierBest Case
L 1 d
ista
nce
# of tiles, N
L 1 d
ista
nce
# of tiles, N
(a)
(b)

96
to the FC heuristic for N = 200. Moreover, from Figure 5.8(b), EM, FC, and NF cases are
close to the optimal solution (i.e., the BC scenario) for N varying from 1 to 20.
5.5.1.B Minimization of L1(R’) + L1(R-R’)
Now we have a better sense about minimizing L1(R’) + L1(R-R’). Considering the system
configuration in Figure 5.6(a)), assume that the new incoming application has 12 vertices,
i.e., |R’| = 12. To minimize L1(R’) + L1(R-R’), we implement the EM, FC, and NF heuristics
described above. The first tile of each approach is selected from any boundary tile of R, i.e.
any boundary of the available tiles or next to the boundary of existing vertices. Note that
compared to the problem discussed in Section 5.5.1.A, the L1(R’) + L1(R-R’) minimization
problem has one obvious limitation: the boundary constraint. Under this limitation, for the
EM, FC, and NF cases, we need to add one more constraint; that is, the grid which is selected
should be inside the region R. Additionally, for the NF case, since the boundary condition
greatly influences the neighboring information, we need additional modifications. Initially,
every tile in the grid has four neighbors, except the corner tiles which have only three
neighbors. Other steps are the same as in Section 5.5.1.A.
Figure 5.9 shows the histogram of [L1(R’) + L1(R-R’)] values derived from 1000 runs for
each heuristic (EM, FC, and NF). For example, in Figure 5.9(c) which uses the NF approach,
we can get the [L1(R’) + L1(R-R’)] distance equal to 498 for 369 times. Of note, neither EM
nor FC can obtain this small value. We also summarize these data in Table 5.1 which lists the
L1 distance of the selected region R’ and the remaining region R-R’ for an average of 1000
runs. Also, we list the standard deviation over the mean of L1(R’) + L1(R-R’) in 1000 runs, and
the best/worst results for each heuristic.
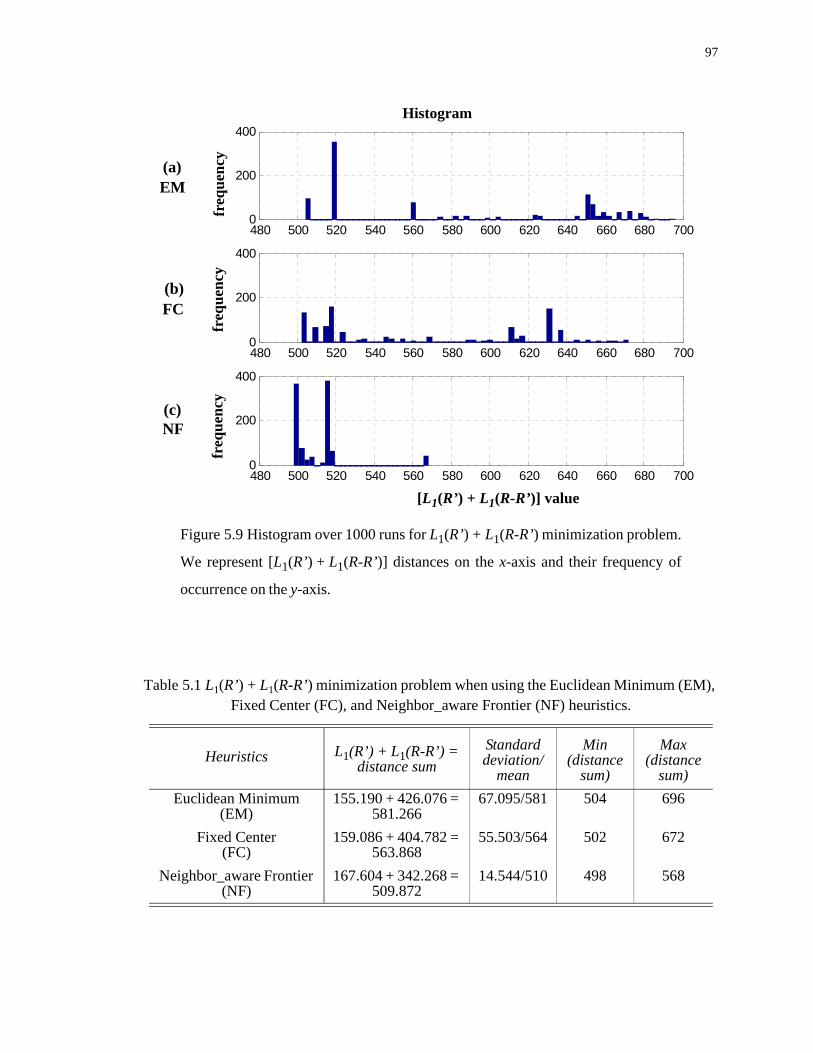
97
Table 5.1 L1(R’) + L1(R-R’) minimization problem when using the Euclidean Minimum (EM), Fixed Center (FC), and Neighbor_aware Frontier (NF) heuristics.
Heuristics L1(R’) + L1(R-R’) = distance sum
Standarddeviation/
mean
Min(distance
sum)
Max(distance
sum)Euclidean Minimum
(EM)155.190 + 426.076 =
581.26667.095/581 504 696
Fixed Center (FC)
159.086 + 404.782 = 563.868
55.503/564 502 672
Neighbor_aware Frontier (NF)
167.604 + 342.268 = 509.872
14.544/510 498 568
Figure 5.9 Histogram over 1000 runs for L1(R’) + L1(R-R’) minimization problem.
We represent [L1(R’) + L1(R-R’)] distances on the x-axis and their frequency of
occurrence on the y-axis.
480 500 520 540 560 580 600 620 640 660 680 7000
200
400
480 500 520 540 560 580 600 620 640 660 680 7000
200
400
480 500 520 540 560 580 600 620 640 660 680 7000
200
400
Histogram
[L1(R’) + L1(R-R’)] value
freq
uenc
yfr
eque
ncy
freq
uenc
y
(a)EM
(b)FC
(c)NF

98
From Figure 5.9 and Table 5.1, we observe that the EM and FC do not work well for
solving the L1(R’) + L1(R-R’) minimization problem. As seen in Table 5.1, even though the
value of L1(R’) of EM and FC heuristics is quite small, the pairwise distance outside the
region, namely L1(R-R’), is relatively high; that is, the selected region does not help for
additional mappings. On the contrary, the NF with the neighboring information included helps
the additional mappings (the decrease in L1(R-R’) distance is 19% and 15% compared to the
EM and FC, respectively). Even if the distance L1(R’) of the NF is about 8% and 5% larger
than that of the EM and FC, respectively, the total distance, L1(R’) + L1(R-R’) of the NF is still
10% less than the solutions provided by the EM and FC. In addition, when observing the NF
in Figure 5.9(c), we have a higher probability to get the smaller L1(R’) + L1(R-R’) value
compared to EM and FC heuristics shown in Figure 5.9(a) and (b). This matches the goals of
the incremental mapping process, namely, to minimize the inter-processor communication cost
for the incoming application (i.e., smaller L1(R’)) and easily add additional applications to the
resulting system with minimal inter-processor communication overhead (i.e., smaller L1(R-
R’)).
5.5.1.C Solution to the Region Selection Problem for Run-time Incremental Mapping
Process
From the discussion in Section 5.5.1.A and Section 5.5.1.B, we decide to apply the NF
heuristic to the region selection problem (see Figure 5.3). Since for the above discussion, all
grids were considered to be the same (i.e., homogeneous system), we need to define two new
terms in order to deal with the heterogeneity of our proposed platform (see Figure 5.4(b)).
• Dispersion factor (D): The dispersion factor of a PE, D(PE), is defined as:
D(PE) = C - number of utilized neighbors of that PE (5.4)

99
where C is a constant. For the corner PEs, C = 3; for other PEs inside (including the
boundary), C = 46.
The PEs with the smaller D(PE) value indicate a higher likelihood to be included into
the current region. Indeed, a PE that has most of its neighbors utilized (i.e., PE with a
small D(PE) value), is very likely to be later isolated; then selecting this PE for the
current region helps reduce its dispersion probability.
• Centrifugal factor (C): The PE centrifugal factor, C(PE), is defined as the Manhattan
Distance between any PE and the border of the current region. PEs with the smaller
C(PE) value indicate a high likelihood to be included into the current region. Indeed,
since every PE in a near convex region should be close to the borders of that region, the
PE with smaller C(PE) is better suited for selection to form a near convex region.
Examples of calculation of the Dispersion and Centrifugal factors are shown in
Figure 5.10. PE12, PE13, PE21, PE22, PE23, and PE31 are running pre-existing applications
and considered to be unavailable. The current region is framed with thicker lines. We
6. The reason of not setting C as 2, 3, 4 for corner tiles, boundary tiles, and others is to avoid the higherprobability of keeping selecting all the boundary tiles into the region, such that the formed regionmay lose the convexity.
Figure 5.10 Dispersion and Centrifugal factor calculation example.
GM1
2
3
4
5
6
7
1 2 3 4 5 6 7
current region
C(PE32) = 1
C(PE77) = 7
D(PE34) = 4
D(PE53) = 3D(PE32) = 1
D(PE77) = 3
C(PE53) = 1
C(PE34) = 2
xy

100
demonstrate how to select and bring PEs into the current region, while keeping its shape as
convex as possible. In Figure 5.10, four PEs (PE32, PE34, PE53, and PE77) are selected as
examples for calculating D(PE) and C(PE). For PE32, D(PE32) = 1 since its neighbors PE22,
PE31, and PE42 are unavailable, while C(PE32) = 1 since it has a Manhattan Distance of 1 to
the region boundary. Other three PEs with Dispersion and Centrifugal factors calculation are
shown in Figure 5.10. Since PE with minimum D(PE) + C(PE) value indicates a higher
likelihood to form a near convex region, under the current region, PE32 is more likely to be
selected to become part of the region compared to PE53, PE34, and PE77. The steps of region
selection (similar to maze routing [93]) are used in Figure 5.11. (assuming k voltage levels in
the system and mk is the number of available PEs in the kth voltage level).
Of note, the k value in the platform does affect the convexity of the region selection; the
larger k value is, the less convexity the region it may form. Therefor, if the k value is too close
to the number of PEs in the system, that is, the platform is much heterogeneity, then it is not
suitable to apply the approach proposed in this chapter. However, it is reported that the k value
is much smaller than the number of PEs in the platform due to the circuit (mixed-clock FIFO)
or energy overhead of communicating PEs in different voltage levels. One experiment in [119]
shows that having 3 voltage levels for 5 × 5 NoC (total 25 PEs) for telecom benchmark
Figure 5.11 Near convex region selection algorithm.
Step 1): Assign each vertex v to Si where i is greater than M(v), and sortthem out in non-decreasing order, |S1|≤|S2|≤ … ≤|Sk|.
Step 2): Start with S1, select a PEij with minimum code transfer energy
Step 3): Update the D(PE) and C(PE) for unselected and idle PEs of
Step 4): Repeat Step 3 for the remaining sets.
that set. Select PEij with lowest D(PEij)+ C(PEij) into region. Continue with Step 3 until the number of PEs in the selected region matches the size of this set.
consumption and include into the region.

101
collected from embedded system synthesis benchmark suite (E3S) [50], the energy
consumption is more than four time reduction compared to the single voltage level case, and
smaller than that of 4, 5, or more voltage levels cases. Given the platform with the reasonable
heterogeneity, our region selected by our proposed approach (see Figure 5.11) forms more
convex than other task allocation approach which does not consider the additional mappings,
which has hugh impact on the overall communication cost as proofed in Section 5.5.1.B.
Now, we consider now a simple example and describe our approach step-by-step. The
ACG of the incoming application and system behavior are given in Figure 5.12 ((a) and (b))
where the black dots show the pre-existing applications in the system. The number marked on
Figure 5.12 Incremental run-time mapping process. (a) The ACG of the incomingapplication (b) Current system behavior (c) Near convex region selection process (d) Vertexallocation process.
GM
|SH|=2|SL|=7
GM1 2
3
4
5
6
7
{1} {2}
{3}
{5}
{4}
{6}
{9}
{6} {6}
R1
ACG
MC
R(v 4
) = M
CR(
v 6) =
v2
v1v3
v4 v5
v6 v7
v8v9
R1 is selected
1
2
3
4
5
6
7
GM
R1
v5 v1
v2
v3
v4v6
v7
v8
v9
1 2 3 4
1 2
`H
'
3 4 5
5 6 7
1 2
3
4
5
6
7
1 2 3 4 5 6 7 xy
xy
xy
`H’ voltage level`L’ voltage level
(a) (b)
(c)
(d)

102
each PE (e.g., {3} on PE32) in Figure 5.12(c) represents the selection order in forming a near
convex region. PEs with the same number show that they are selected into the region at the
same time.
We can see from Figure 5.12(a), that there are two vertices (v4 and v6) with
M(v4) = M(v6) = ‘H’ which are supposed to be mapped onto the PEs at high (‘H’) voltage
level; the other vertices can be mapped onto the PEs in ‘L’ voltage level, namely, |SH| = 2
(SH = {v4 , v6}) and |SL| = 7 (Step 1). Let us start with SH (Step 2), and assume that PE42 is
selected first to become part of the region for minimizing the code transfer energy
consumption (Figure 5.12(c)). Then, PE43 is the second PE selected for the region (Step 3)
since it has the lowest D(PE43) + C(PE43) = 3 + 1 (D(PE43) = 3 because PE33, PE44, and
PE53 are all idle. Comparing this to D(PE44) + C(PE44) = 4 + 2 or
D(PE46) + C(PE46) = 4 + 4, implies that PE43 gets selected). Step 3 terminates since the PEs
in SH are all selected inside the region. Now, we deal with the selection of SL (Step 4). Going
back to Step 3, PE32 is selected since it has the lowest D(PE) + C(PE) = 1 + 1. After that,
PE33 is selected with D(PE33)+C(PE33) = 1 + 1 and then PE41 is selected with
D(PE41)+C(PE41) = 2 + 1. With the same rule, PE51, PE52, and PE53 are selected with the
lowest D(PE)+C(PE)=4. Finally, PE61 is randomly selected among PE61, PE62, PE63, PE34,
and PE54, with all of them getting the same value of D(PE) + C(PE).
5.5.1.D Complexity of the Region Selection Algorithm
In order to determine the time complexity of the region selection algorithm, assume that
the ACG = (V, E) and the system contains a total of n × n PEs organized in k voltage levels,
where |V| < n2. Therefore, |S1| + |S2| + ... + |Sk| = |V|, where Si is the size of vertex set which is
about to be selected for the ith voltage level and m1 + m2 + ... + mk n2, where mi is the
number of available PEs in ith voltage level.
≤

103
In Step 1 of Figure 5.11, calculating the size of PE sets takes O(V) time and the run-time
for sorting them is O(VlogV) if using QUICKSORT. Steps 2-4 need O(m12+m2
2+...+mk2) since in
Step 3, we need to update D(PE)+C(PE) for each PE in a certain set which takes linear time.
The worst-case scenario occurs when only one PE is selected into the region each time. Thus,
the total run time of region selection algorithm is O(n4+VlogV); that is, O(n4) since VlogV <
n2logn2 < n4. However, in Steps 3-4, we can record the frontier of the region and store the
information, D(PE)+C(PE), of this wavefront in a HEAP. Using this data structure, the run-
time for Steps 3-4 is reduced from O(m12 + m2
2 + ... + mk2) to O(S1logS1 + S2logS2
+ ... + SklogSk) = O(VlogV). Thus, the total time complexity of the region selection algorithm
becomes O(VlogV).
5.5.2. Solutions to the Vertex Allocation Problem
After the near convex region is selected, we continue allocating vertices of the incoming
application to the PEs with specific voltage levels in the selected region (see Figure 5.3),
while minimizing the inter-processor communication. To keep track of the vertex allocation
process, we color each vertex white, gray, or black. A gray vertex indicates that it has some
tentative PE locations but its precise location will be decided later. On the contrary, a black
vertex indicates that it has been already mapped onto some PE and this mapping will not
change anymore. All vertices start out being white and may later either become gray and then
black, or become directly black. A PE is set to be unavailable after a black vertex is mapped
onto it.
We define two actions for vertices:
• DISCOVER: This consists of 1) Select available PEs with a specific voltage level for
vertex t and 2) Color vertex t gray; then, vertex t is considered as “discovered”.

104
• FINISH: This consists of 1) Select a specific PE for vertex t such that the distance
between vertex t and its gray or black neighboring vertices is minimized. (Note that if
more than one PE gets the minimum distance, we select the PEij with its D(PEij) closest
to the number of nonblack neighbors of vertex t) and 2) Color vertex t black; then,
vertex t is considered as “finished”.
In short, we first sort vertices into an ordered set using the non-increasing order of their
total communication volume; that is, the higher communication volume a vertex has, the
earlier it is discovered or finished. The vertex allocation algorithm is summarized in
Figure 5.13.
Let us follow now the same example in Figure 5.12. The ACG in Figure 5.12(a) is going
to be mapped onto the region R1 which has been selected in Section 5.5.1.C. The final result is
shown in Figure 5.12(d); Figure 5.14 shows the vertex allocation process step-by-step.
Remember that for this ACG, the smallest vertex set is SH= {v4 , v6}.
Assume now that, based on the total communication volume, the vertex ordered set is {9,
6, 7, 5, 8, 4, 1, 3, 2}. Also, assume that all vertices are initially white (Figure 5.14(a)). We
Step 1): Color all vertices white. Then, start with the first white vertex in
Step 2): IF neighbors of vertex t are neither gray nor black, then do
Step 3): IF neighbors of vertex t are either gray or black, then do FINISH
Step 4): Go back to the first vertex of the ordered set, do Steps 2 and 3 for
Figure 5.13 Vertex allocation algorithm.
Step 5): Repeat Step 4 if there exists any nonblack vertex in the ordered set; otherwise, stop the algorithm.
each nonblack vertex t until the color of any nonblack vertex changes. Then go to Step 5.
for vertex t.
the smallest vertex set based on the ordered set.
DISCOVER for vertex t.

105
Figure 5.14 Vertex allocation process based on the example in Figure 5.12. (a) Initialconfiguration with every vertex white. (b) Vertex 6 is discovered. (c) Vertex 9 is discovered.(d) Vertex 7 is finished and colored black. (e) Vertex 9 is colored from gray to black. (f)Vertex 6 is colored from gray to black (g) Vertex allocation process is done; all vertices arecolored black.
v2
v1v3
v4 v5
v6 v7
v8v9
v2
v1v3
v4 v5
v6 v7
v8v9
v7
v2
v1v3
v4 v5
v6 v7
v8v9
v2
v1v3
v4 v5
v6 v7
v8v9
v7v9
v6
v7v9
v2
v1v3
v4 v5
v6
v8
v2
v1v3
v4 v5
v6 v7
v8v9
v6
v6 v6
3
4
5
6
1 2 3
v9
v6 v6
v9 v9
v9 v9
v9
v9
v9
v7
3
4
5
6
1 2 3
3
4
5
6
1 2 3
3
4
5
6
1 2 3
3
4
5
6
1 2 3
3
4
5
6
1 2 3
v6 v6
v9
v9 v9
v9
v9
v9
v9
v6 v6
v6 ...
v7
v9
v5
xy
xy
xy
xy
xy
xy
v6
v7v9
v2
v1v3
v4 v5
v6 v7
v8v9
3
4
5
6
1 2 3xy
v5
v2 v4
v3
v8
v1
v9
(a) (b) (c) (d)
(e) (f) (g)
106
start with vertex 6, since it has the smallest order among the vertices in SH (Step 1). Since at
this time its neighbors, vertices 5 and 7 (see in Figure 5.14(a)) are white, we DISCOVER this
vertex (i.e., color it gray) and select PE42 and PE43 (because these are the only PE locations at
‘H’ voltage level in region R1) to map it (Step 2); namely, vertex 6 will be allocated onto PE42
or PE43 later (Figure 5.14(b)). Then continuing with Step 4, we go back to the first vertex in
the ordered set. At this moment, the color of vertex 9 changes from white to gray since all
neighbors of vertex 9 are white; we select PE32, PE33, PE41, PE51, PE52, PE53, and PE61 for
it (Figure 5.14(c)). With the following repeat of Step 4, the color of vertices 9 and 6 remains
unchanged. Then, we consider vertex 7; its color changes from white to black directly since
vertices 6 and 9 are gray. We allocate vertex 7 onto PE52 (Figure 5.14(d)) since PE32, PE33,
PE41, PE52, PE53 has the minimum distance with the gray PEs where vertex 6 allocated and
D(PE52) = 3 equals to the number of nonblack neighbors of vertex 7. And then, since there
exists nonblack vertex in the ordered set, we repeat Step 4. Vertex 9 becomes black since its
neighbor, vertex 7, is colored black (Figure 5.14(e)) and we allocate vertex 9 onto the precise
location, PE51 (Figure 5.14(f)). We continue this process until all vertices are colored black
and each vertex is allocated a precise PE location. Figure 5.14(g) shows the final result of
vertex allocation process.
Complexity of the vertex allocation algorithm: The total run time of our algorithm has a
complexity of O(V2+E). This is because the body of the loop (Steps 4-5) executes |V| times,
while reaching at most |V| vertices each time. In addition, since each vertex will be reached at
most two times (i.e., DISCOVER and FINISH), and the adjacency list of each vertex is
scanned only when the vertex is reached, the total time of scanning the adjacency lists is O(E).

107
5.6. Experimental Results
We first evaluate the impact of the near convex region selection and vertex allocation
steps of the incremental mapping process using synthetic benchmarks (see Section 5.6.1 and
Section 5.6.2, respectively). Then, the overall algorithm with run-time energy overhead
considered is evaluated using synthetic benchmarks (see Section 5.6.3). To show the potential
of our proposed mapping algorithms for real applications, we later apply it to the embedded
system synthesis benchmark suite, E3S [50] (Section 5.6.4).
5.6.1. Evaluation of Region Selection Algorithm on Random Applications
To show that the choice of a near convex region heavily impacts the communication cost
of the incremental mapping process, we consider the following experiment. Several sets of
applications are generated using the TGFF package [162]. The vertex number and the
communication volume are randomly generated according to some specified distributions.
Then, applications are randomly selected for mapping onto the system or being removed from
it. For mapping onto the resulting system while pre-existing application remain fixed, two
different strategies are implemented: 1) A greedy approach minimizing the inter-processor
communication cost of the current configuration but without considering the newly incoming
applications and 2) A near convex region is first selected using the proposed approach and
then the application is optimally mapped onto this region using exhaustive search.
The number of vertices per application ranges between 5 and 10. The system consists of
7 × 7 PEs with PE11 being used as the global manager. The variance of the communication
volume per edge in one application is set arbitrarily between 0 and 106. Initially, there is no
application in the system. The sequence of events in the system is incremented whenever an
application comes to or departs from the system. If the number of idle PEs in the system is

108
smaller than the number of vertices of the incoming application, then the incoming application
is not accepted.
Figure 5.15(a) shows the inter-processor communication cost ratio between the mapping
using Strategy_1 (i.e., without selecting a region) and that in Strategy_2 (with selecting a near
convex region). Here, the inter-processor communication contains all communications (i.e.,
pre-existing and the incoming applications) in the system. We also show the number of
utilized PEs (except the GM) in that particular system configuration.
Variance of comm. rate per edge10
010
110
210
310
410
510
65
10
15
20
25
30
Com
m. e
nerg
y lo
ss (%
)
8 10 15 20 25 3040
45
50
55
60
Number of vertices per application
Com
m. e
nerg
y sa
ving
s (%
)
Figure 5.15 (a) Impact of selection region process on inter-processor communication. (b)Communication energy loss: optimal mapping vs. our allocation algorithm given a selectedregion. (c) Optimal vs. our allocation algorithm under different communication rates. (d)Communication energy savings: arbitrary mapping vs. our allocation algorithm.
0
0.2
0.4
0.6
0.8
1
1.2
1.4
05101520253035404550
:
: # of utilized PE
Com
mun
icat
ion
cost
ratio
1 3 5 7 9 11 13 15Random sequence of incoming applications
Strategy_2Strategy_1 #
of u
tiliz
ed P
E
(a) (b)
(c) (d)
8 9 10 11 1216
18
20
22
24
Number of vertices per application
Com
m. e
nerg
y lo
ss (%
)

109
As shown in Figure 5.15(a), there is a slight increase in the communication ratio at the
beginning because the greedy approach performs well when the number of utilized PEs in the
system is small. Once the number of utilized PEs increases due to the incoming applications,
the benefit of our proposed algorithm becomes obvious. Finally, the ratio becomes stable since
for Strategy_1, when the application leaves the system, there is always a scattered region left
for additional mapping. This example demonstrates that near convex region selection
definitely helps the incremental mapping process.
5.6.2. Evaluation of Vertex Allocation Algorithm on Random Applications
We first compare the run-time and solution of our algorithm against exhaustive approach.
Experiments here are performed on a Intel® Pentium 4 CPU (2.60GHz with 768MB memory),
while we later report the run-time and energy overhead of running our algorithms on the real
embedded processor in Figure 5.6.4. The run-time for finding the optimal mapping within
selected region increases exponentially with the number of vertices in each application: For 8,
9, 10, 11, and 12 vertices in one application, it takes 0.2sec, 1.5sec, 4min, 10min, and 2hrs,
respectively, to obtain the optimal mapping. On the other hand, the run-time of our algorithm
stays within 3μsec, when the number of vertices varies between 8 and 20. Since finding the
optimal mapping for a region with 13 vertices takes more than 26hrs, we vary the number of
vertices per application from 8 to 12 (see points on x-axis in Figure 5.15(b)). More
specifically, there are 5 categories, (|V|=8-12), each category containing 40 applications
generated with TGFF.
We denote the energy consumption of our allocation algorithm by Eh, and the energy
consumption of the optimal mapping with the same region by Ee. Thus (Eh-Ee)/Ee × 100% is
the percentage of reported energy loss compared to the optimal solution. As shown in
Figure 5.15(b), the energy loss for each category is always less than 21%, and not scale up as

110
problem size increases. Therefore, our vertex allocation algorithm provides good results for
large designs.
Now, we address the impact of variance of communication rate per edge on the energy
consumption in Figure 5.15(c). The vertex number in one application used in this experiment
is fixed to 10 and the variance of communication volume per edge is set from 100, 101, 102,...,
to 106 (7 categories). For each category, we run 50 different ACGs and calculate the averages.
It can be seen from Figure 5.15(c) that our average communication energy loss in all
categories is within 21.5% compared to the optimal solution under the same region.
Last, in Figure 5.15(d), we compare the solution of an arbitrary mapping against our
algorithm. Since the run-time of arbitrary mapping is very small, we can consider ACGs with
a large number of vertices (i.e., 30 in Figure 5.15(d)) and see if our algorithm scales well. The
number of vertices per application used in this experiment ranges between 8 and 30 (i.e., 6
categories, |V|=8, 10, 15, 20, 25, and 30). We generate 20 different regions with PE
locations corresponding to the number of vertices in each category and then run 20
different applications on each selected region. The variance of communication volume per
edge and per application is set between 0 and 106.
We denote the energy consumption of our allocation algorithm by Eh, and the energy
consumption of the arbitrary mapping solution by Ea; then (Ea-Eh)/Ea × 100% is the
percentage of reported energy savings compared to the arbitrary mapping solutions which
are averaged from 500 random results. As shown in Figure 5.15(d), at least 45% savings
can be achieved in all categories; of note, the savings increase as the vertex size scales up.

111
5.6.3. Random Applications Considering Energy Overhead for the Entire Incremen-
tal Mapping Process
We compare seven scenarios to our near convex region selection and vertex allocation
technique (denoted as ‘our_all’ in Figure 5.16) in terms of the communication energy
consumption. In this comparison, the communication energy consumption includes the
energy overhead of delivering control messages (see Section 2.1) and that of running our
on-line processes. The latter overhead is measured by executing the C programs on
MicroBlaze processor running on Xilinx Virtex-II Pro XC2VP30 FPGA. For all these
scenarios, we first perform the region selection process using neighbor frontier (NF), euclidian
minimum (EM), fixed center (FC) or our near convex region selection technique (our). Then,
we perform vertex allocation using either random mapping (random) or our proposed
approach (our) presented in Section 5.5.2.
For example, in Figure 5.16, the notation ‘NF + our’ indicates that we implement the
‘NF’ algorithm (in Section 5.5.1.A) for region selection step and then use “our” vertex
Figure 5.16 Communication energy consumption comparisonusing random applications.
0 2000 4000 6000 8000 10000 120000
0.5
1
1.5
2
:::::::
(NF + our) / our_all(EM + our) / our_all(FC + our) / our_all(NF + random) / our_all(EM + random) / our_all(FC + random) / our_all
Total comm. rate per application (bits)
Com
m. e
nerg
y co
nsum
ptio
n ra
tio
Nearest Neighbor / our_all
112
allocation solutions (in Section 5.5.2) for mapping vertices into the selected region. The
experimental results in Figure 5.16 already include the energy overhead of running these
algorithms, i.e., ‘NF’, ‘EM’, or ‘FC’, and ‘our’ where the results in Figure 5.16 assume the
‘random’ algorithm has zero energy overhead.
Finally, the last scenario we consider is the state-of-the-art mapping approach proposed in
[27]. In this case, we allocate the vertices as close as possible without considering a particular
region. The comparison with this scenario is marked as ‘Nearest Neighbor’ in Figure 5.16.
As observed in Figure 5.16, when the total communication rate for applications is too
small, it can be seen the quality loss of our approach due to the comparable run-time energy
overhead of running our mapping algorithm. However, when the total communication volume
per application is over 10000 bits, we can achieve more than 37.5% = (1.6 - 1)/1.6
communication energy savings compared to all other scenarios.
5.6.4. Real Applications Considering Energy Overhead for the Entire Incremental
Mapping Process
The communication energy overhead of on-line processes contains the message
transmission into the control network and our on-line algorithms (i.e., near convex region
selection and vertex allocation). The incremental mapping process is activated only when a
new application arrives, and so the PEs need to send their status to GM. The communication
volume for all control messages is [a bits (for showing PE address, which depends on network
size) + 1 bit (PE status)] × MD (Manhattan Distance of all PEs to GM). For the 6 × 6 network,
a = 6 (26>36), MD = 180; therefore, all control bits for one incoming application are within 1
Kilobit. Compared to the communication volume in real applications (which is in the
Megabits range), the energy overhead for transmitting the control messages is negligible.

113
Next, we evaluate the extra energy overhead of our on-line algorithms. Our system
contains 6 × 6 PEs of AMD ElanSC520 (133 MHz), AMD K6-2E (500MHz), and one
MicroBlaze core (100MHz) for the global manager running our on-line algorithms. To
evaluate the potential of our on-line algorithms for real applications, we apply it to embedded
system synthesis benchmark suit, E3S [50]. We first do the off-line partitioning process for
each benchmark. The communication energy consumption is measured by a C++ simulator
using the bit energy model [170]. We start with a given system configuration running a set of
pre-existing applications. We denote some terms for energy saving calculation.
• Ph: the communication power consumption of our mapping algorithms
• Pa: the communication power consumption of the implementation of the state-of-the-art
allocation scheme which maps tasks on a contiguous region and as close as possible
[27]
• Pon-line: the power consumption of running the on-line algorithms (a constant, obtained
from MicroBlaze datasheet)
• Tet: the execution time of that application
• Ton-line: the execution time of running our on-line algorithms (obtained from
MicroBlaze processor running on Xilinx Vertex-II Pro XC2VP30 FPGA)
Thus, the communication energy savings of our algorithms compared to mapping
approach proposed in [27] is calculated as follows:
(5.5)Pa Tet×( ) Ph Tet× Pon-line Ton-line×+( )–
Pa Tet×----------------------------------------------------------------------------------------------------------- 100%×
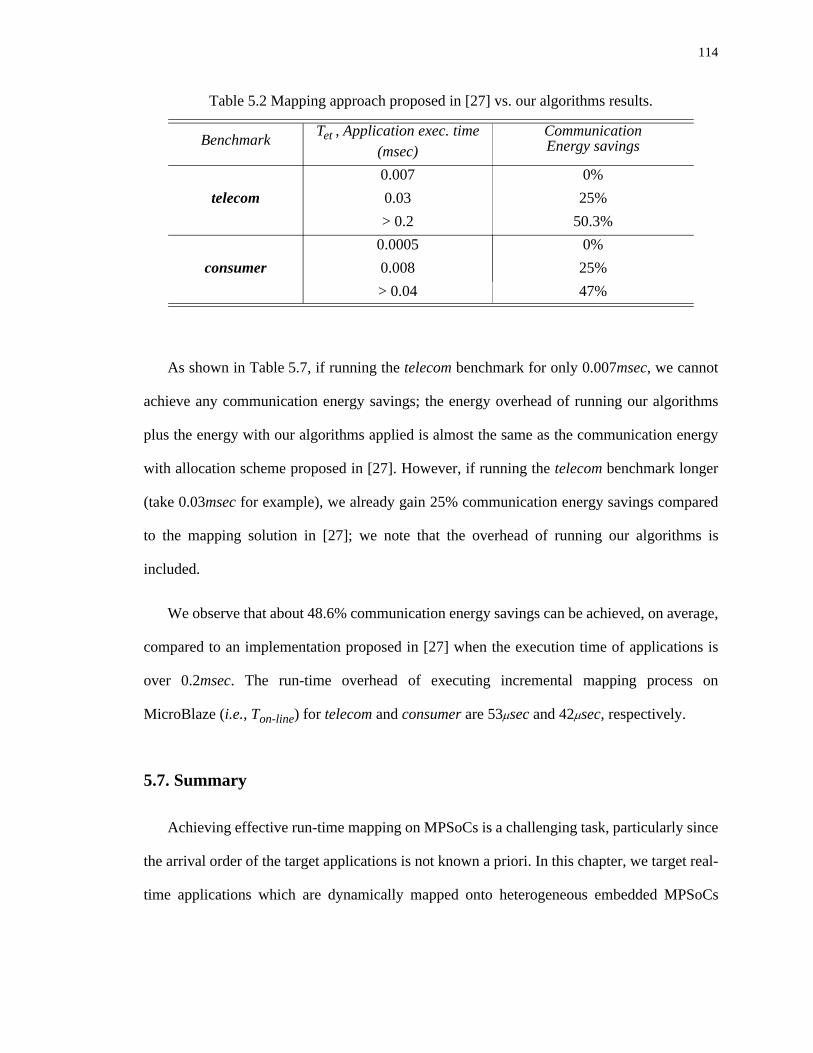
114
Table 5.2 Mapping approach proposed in [27] vs. our algorithms results.
As shown in Table 5.7, if running the telecom benchmark for only 0.007msec, we cannot
achieve any communication energy savings; the energy overhead of running our algorithms
plus the energy with our algorithms applied is almost the same as the communication energy
with allocation scheme proposed in [27]. However, if running the telecom benchmark longer
(take 0.03msec for example), we already gain 25% communication energy savings compared
to the mapping solution in [27]; we note that the overhead of running our algorithms is
included.
We observe that about 48.6% communication energy savings can be achieved, on average,
compared to an implementation proposed in [27] when the execution time of applications is
over 0.2msec. The run-time overhead of executing incremental mapping process on
MicroBlaze (i.e., Ton-line) for telecom and consumer are 53μsec and 42μsec, respectively.
5.7. Summary
Achieving effective run-time mapping on MPSoCs is a challenging task, particularly since
the arrival order of the target applications is not known a priori. In this chapter, we target real-
time applications which are dynamically mapped onto heterogeneous embedded MPSoCs
Benchmark Tet , Application exec. time (msec)
CommunicationEnergy savings
0.007 0%telecom 0.03 25%
> 0.2 50.3%0.0005 0%
consumer 0.008 25%> 0.04 47%

115
where communication happens via the NoC approach and resources connected to the NoC
have multiple voltage levels.
More precisely, we have addressed precisely the energy- and performance-aware
incremental mapping problem for NoCs with multiple voltage levels and proposed an efficient
technique (consisting of near convex region selection and vertex allocation processes) to solve
it. As shown, using the near convex region selection technique, the mapping results of our
algorithms can be obtained very efficiently; also, they are not far from the optimal case.
Moreover, additional incoming applications can be added into system with minimal
communication overhead. Experimental results have shown that the proposed technique is
very fast and as much as 50% communication energy savings can be achieved compared to
using an the state-of-the-art task allocation scheme.
Of note, in this chapter, we address the run-time resource management problem on the 2-D
mesh-based platform, i.e. platform with regular topology. However, the workload variation on
the system may result from the system itself or users’ interaction with the system; we further
discuss deeply about these two factors on run-time optimization in Chapter 6 and Chapter 7,
respectively.

116

117
6. FAULT-TOLERANT TECHNIQUES FOR ON-LINE
RESOURCE MANAGEMENT
6.1. Introduction
Resource utilization and system reliability are critical issues for the overall computing
capability of MPSoCs running a mix of small and large applications [23]. This is particularly
true for MPSoCs consisting of many cores that communicate via the NoC approach since any
failures propagating through the computation or communication infrastructure can degrade the
system performance, or even render the whole system useless. Such failures may result from
imperfect manufacturing, crosstalk, electromigration, alpha particle hits, or cosmic radiation,
and be permanent, transient, or intermittent in nature [145].
Existing fault-tolerant (FT) techniques for NoC resilience target the device, packet/data, or
end-to-end transaction levels of abstraction [53][142]. However, there is a need to
complement these approaches by handling failures at system-level and thus ensuring
resiliency while maintaining the required levels of system performance. From this perspective,
it has been shown that adding spare cores and wires can significantly improve the reliability,
reduce the cost, and be a substitute for the burn-in process [65][145]. For instance, for the
Intel 80-core processor [72], adding 10 or 20 spare cores to achieve 10 × 9 or 10 × 10
configurations, can make the system yield jump to 90% and 99%, respectively [146].
As shown in Figure 6.1, the NoC platform we consider is a 2-D tile-based architecture,
which consists of various resources and network elements. More precisely, the resources
consist of computational tiles (i.e. processors/cores/resources) and memory tiles, while the

118
network elements consist of routers, links, and resource-network interfaces. In the remaining
part of the chapter, we may use the term “resource” and the term “core” alternatively when
there is no ambiguity.
In terms of the computational tiles, we assume a j-out-of-i-core model [145]; that is,
except the distributed manager tiles that control the status of the entire system, the platform
consists of i cores where at least j of these i cores should be defect-free (or active, reachable)
cores responsible for running the application tasks in order to satisfy the system performance
requirements. In other words, if there exist k (permanent) faulty cores in the system due to the
imperfections in manufacturing (see the ‘flash sign’ in Figure 6.1), then we assign i-j-k cores
as spares for application computation. Of note, some design parameters given for the
model, i.e. i, j, and k, are related to the chip yield or manufacturing process; a more
detailed discussion on them can be found in [145][146].
Coming back to Figure 6.1, the main task of the manager titles (‘MA’ tiles in Figure 6.1)
is to 1) decide on resource management and 2) control the migration process via the platform
operating system. The role of a spare core (‘S’ in Figure 6.1) is to replace the (temporarily
Figure 6.1 Non-ideal 2-D mesh platform consists of resources connected via anetwork. The resources include computational tiles (i.e., manager titles, activeand spare cores) and memory titles. Permanent, transient, or intermittent faultsmay affect the computational and communication components on this platform.
: computational core/tile, type: ‘CP’
: router: links: distributed global MAnager
: Spare core: permanent faulty core: transient/intermittent faulty coreMEM MEM MEM
!
MA
MA
S
S
S!
MEM MEM MEM
!
MA
MA
S
S
S!
MA
MEM
S
!
: MEMory, type: ‘MEM’

119
or intermittent) faulty cores (see ‘!’ in Figure 6.1) or other unreachable cores (due to the
failure of the system interconnect). In other words, each active core has a probability p > 0 to
be affected by transient, intermittent, or permanent faults. We note that p is not a constant
during the chip lifetime, as it depends on chip lifetime cycles, processor utilization, or even
temperature. If necessary, the application tasks assigned to the active core will migrate to the
spares in order to continue being processed. Such task migration processes are controlled by
the distributed manager tiles.
Doing effective resource management for such irregular MPSoCs while failures occur
dynamically, and minimizing the communication energy consumption while maximizing the
entire system performance is a challenging task. It is obvious that the lack of regularity
increases the distance among various cores; this may further incur a higher network contention
on inter- or intra- application communication. In turn, the contention in the network may
degrade the system throughput. Critical factors for causing the system degradation need to be
quantified in order to handle the dynamic application mapping on such irregular platforms. In
addition, when a transient, intermittent, or permanent failure occurs, the system must be able
to isolate the failure from the offending resource and thus some mechanisms are needed in
order to avoid failure propagation to the rest of the system.
Given the above consideration, we address the problem of run-time fault tolerant resource
management, with the objective of allocating the application tasks to the available, reachable, and
defect-free resources in irregular NoC-based multiprocessor platforms (i.e., j-out-of-i computation
model with known and dynamic faulty probability p for each active core). The goal of this
dynamic technique is to minimize the communication energy consumption and network
contention, while maximizing the overall system performance. The challenge of the approach is
to manage the run-time and energy overhead for running such an algorithm, while maintaining
useful levels of fault tolerance in the network [42]. Our contributions are as follows:

120
• First, we explore the spare core placement problem and investigate the impact on failure
propagation probability.
• Second, we analyze the major factors that produce network contention before
investigating critical metrics for measuring the network contention and system
fragmentation, as well as their impacts on system performance.
• Third, we propose and evaluate an efficient algorithm for fault-tolerant resource
management with the goal of minimizing the communication energy consumption and
maximizing the overall system performance.
Taken together, these specific contributions improve the system-level resiliency, while
optimizing the communication energy consumption and the system performance.
The remaining of this chapter is organized as follows. In Section 6.2, we review the
relevant work. Section 6.3 analyzes the impact on network contention and spare core
placement. In Section 6.4, we investigate several critical metrics and provide insight into the
FT resource management problem on irregular platforms. The problem formulation and
details of the proposed FT algorithms are presented in Section 6.5. Experimental results are
presented in Section 6.6. Finally, we summarize our contribution in Section 6.7.
6.2. Related Work and Novel Contributions
There is a considerable work on online failures/errors diagnosis and detection for
multiprocessor systems at micro-architecture level with low power and area overhead
[49][96]. Besides this work, operating system control in NoC-based multiprocessor platforms
has been proposed to support system-level fault-tolerance [117]. Other techniques for failure/
error as well as thermal monitoring for NoC platforms have been proposed in [84][136]. More
recently, Huang et al. have taken the system lifetime reliability and system lifetime into

121
consideration at design time, while dealing with the application task mapping in NoC-based
MPSoCs [82]. In addition, transient failures on NoC links have also been considered under
stochastic and adaptive routing schemes [53][102][142].
There exists prior work on run-time application mapping on NoCs that aims at optimizing
the packet latency and power/energy consumption [27][79][110][154]. However, to the best of
our knowledge, this is the first work that considers the run-time fault-tolerant resource
management on non-ideal NoC platforms which is able to cope with the occurrence of static
and dynamic failures on both computational or communication components. Of note, while we
assume there exists a fault/error detection scheme with support for thermal monitoring, we
focus our attention on application mapping for such non-ideal NoC platforms which support
multiple applications entering and leaving the system dynamically.
6.3. Analysis for Network Contention and Spare Core Placement
6.3.1. Network Contention Impact
Since applications enter and leave the system dynamically, the application communication
contention is less likely to be avoided. Therefore, before proposing the mechanism for run-
time FT resource management (especially on such irregular NoC), it is definitely necessary to
figure out the impact of all possible communication contention on system performance; here,
we clarify them into three types: source-based, destination-based, and path-based contention.
Figure 6.2 captures one application mapping on mesh-based 3 × 3 NoC, where the application
characteristic is defined in Section 2.2.
• Source-based contention: it occurs when two traffic flows originating from the same
source contend for the same links, as shown in Figure 6.2(b).

122
• Destination-based contention: it occurs when two traffic flows which have the same
destination contend for the same links, as shown in Figure 6.2(c).
• Path-based contention: it occurs when two traffic flows which neither come from the
same source, nor go towards the same destination contend for the same links
somewhere in the network, as shown in Figure 6.2(d). These two traffic flows can be
from the same applications or from the different applications, so-called internal or
external network contention as defined in [98] and [99]. From the definition of path-
based contention, it mostly comes from the external contention.
To illustrate the impact of the source-based, destination-based, and path-based network
contention on the packet latency, we consider the following experiment, i.e., several mapping
configurations (see Figure 6.3) in a 4 × 4 mesh NoC: without/with only source-based
contention (cases 1 vs. 2), without/with only destination-based contention (cases 3 vs. 4), and
without/with only path-based contention (cases 5 vs. 6). We apply the XY routing and
wormhole switching for data transmission with 5 flits per packet. The communication rate (or
the packet injection rate from the source core) of transmissions in each configuration is set to
be the same. For fixed injection rates in each configuration, we run 100 different experiments
and calculate the corresponding average packet latency and throughput; the latency is
Figure 6.2 Application mapping on mesh-based 3 × 3 NoC (a) Application characteristicACG = (V, E) (b) Source-based contention (c) Destination-based contention (d) Path-based contention.
e12
e13 e13
e23 e24
e13
v1 v2 v3
v4
v1 v2 v3
v4
v1 v2 v3
v4
PEACG = (V , E)
e12
v4
v2
v1
v3
e13
e23e24
e43
(a) (b) (c) (d)

123
0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10
100
200
300
400
500case 1: without source-based contentioncase 2: with source-based contention
Figure 6.3 The (a) source-based (b) destination-based (c) path-based contention impacton average packet latency.
packet injection rate (packet/cycle)
avg.
pac
ket l
aten
cy
0.08 0.1 0.12 0.14 0.16 0.180
100
200
300
400case 3: without destination-based contentioncase 4: with destination-based contention
packet injection rate (packet/cycle)
avg.
pac
ket l
aten
cy
0.1 0.15 0.2 0.25 0.3 0.35 0.40
100
200
300
400case 5: without path-based contentioncase 6: with path-based contention
packet injection rate (packet/cycle)
avg.
pac
ket l
aten
cy
S DD
D
D
S D
D
D
D
case 1
case 2
(a)
D SS
SS
S
D S
S
S
S
case 3
case 4
(b)
D
D
D
S
S
SD
S
D
SD
D
D
S
S
S
case 5
case 6
(c)

124
calculated from the time when packets are generated from sources to the time when the
packets reach the destination. The results are plotted in Figure 6.3 with the x-axis showing the
total injection rate of all transmissions in that configuration and the y-axis showing the
average packet latency at the corresponding injection rate.
As seen in Figure 6.3(a), for source-based contention (i.e., cases 1 and 2), the throughput
is the same. This makes sense since every generated packet needs to pass through the link
from the source core to its router; therefore, the system performance is basically limited by the
injection rate of the source core.
For destination-based contention (i.e., cases 3 and 4 in Figure 6.3(b)), the system
throughput has about 2% improvement. We observe that the bottleneck of these two
configurations (i.e., cases 3 and 4) is actually due to the link between the router and its
corresponding destination core for which all packets contend. Obviously, such intra-tile
contention can be mitigated via careful hardware/software codesign (i.e., clustering process),
but can not be solved via mapping.
As seen in Figure 6.3(c), there is a dramatic throughput difference when comparing cases
5 and 6 (without/with path-based contention, respectively) as 118% throughput improvement
is observed (i.e., the throughput improves from 0.16 to 0.35 without path-based contention in
the network). Moreover, we observe that the frequency of occurrence of the path-based
contention is much higher compared to the source-based and destination-based contention as
the system size scales up. By doing several experiments involving many runs, we observed
that the ratio of path-based to source-based contention and the ratio of path-based to
destination-based contention increase linearly with the network size (i.e., for 4 × 4, 6 × 6,
8 × 8, and 10 × 10, the ratios are 1.2, 2.5, 4.0, 5.6, respectively). Therefore, in the remaining of
this chapter, we focus on minimizing the path-based contention since this has the most
significant impact on the packet latency and can be mitigated through the mapping process.
125
Of note, to show the impact of the path-based contention minimization on system
performance, we proof such statement using an integer linear programming-based (ILP-based)
contention-aware mapping technique with the goal of minimizing the network contention and
communication energy consumption (see Appendix B for a detailed formulation on ILP
method and more experimental results for synthetic and real applications). Through such ILP-
based analysis, it can be observed that by mitigating the critical contention, i.e. path-based
contention, the end-to-end average packet latency can be significantly decreased with minimal
communication energy overhead. Indeed, this concept has been explored in Chapter 5. As
discussed in Section 5.5.1, under the near convex region selection step, we are able to
minimize the network contention resulting from different applications, which helps mitigating
a large portion of path-based contention. Since it is impossible to remove all internal and
external of path-based contentions during run-time mapping on such irregular platform, we
investigate several metrics, as discussed in Section 6.4, in order to achieve this goal.
6.3.2. Spare Core Placement
Any fault tolerant (FT) scheme needs to show i) No single point of failure ii) No single
point of repair iii) Fault detection and recovery iv) Fault isolation to the failing core v) Fault
containment to prevent propagation of the failure [59]. For the first two requirements, it is
clear that since the spare cores exist, if any of the cores in the system fails, it is unlikely to
bring the entire system to a halt. In addition, we do not need to shut down the entire system in
order to replace a failed core; instead, we can simply have the state recovery scheme in each
core [64] or replace the failed core with the spare one at run-time via task/process migration.
The task migration at task- and resource-level have been well studied for reduced response
time [19][161] and proactive/reactive interrupt [140] between processors and so this is out of
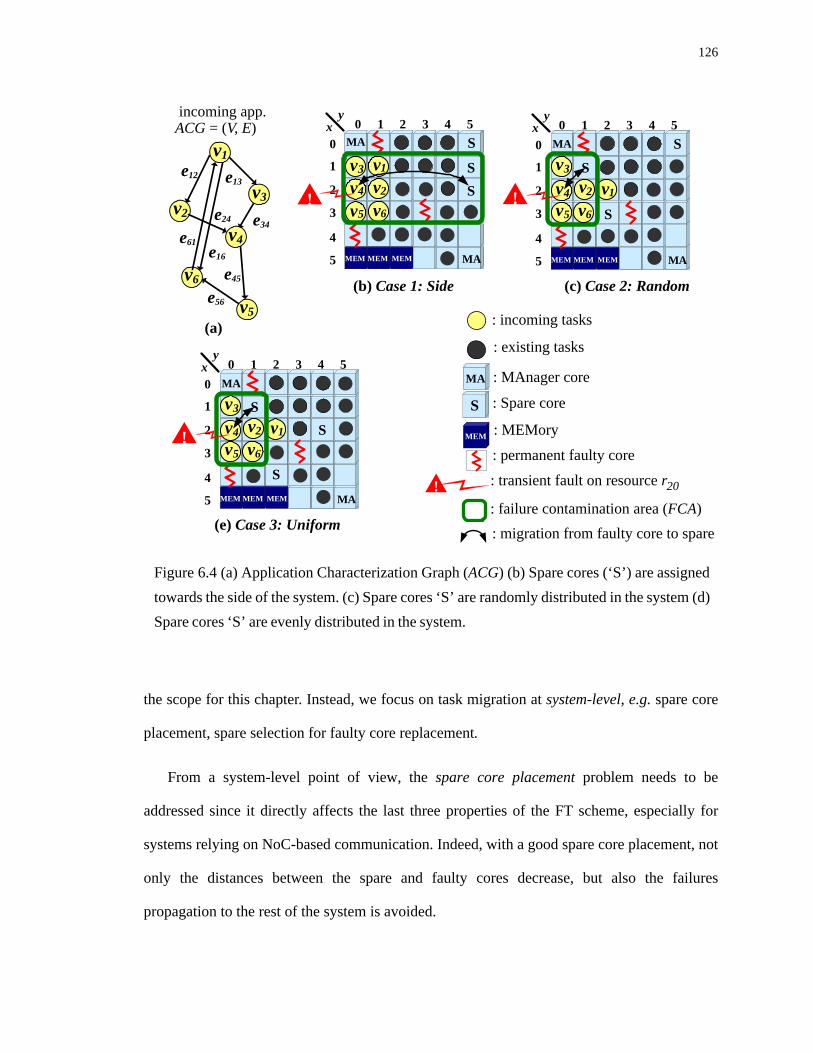
126
the scope for this chapter. Instead, we focus on task migration at system-level, e.g. spare core
placement, spare selection for faulty core replacement.
From a system-level point of view, the spare core placement problem needs to be
addressed since it directly affects the last three properties of the FT scheme, especially for
systems relying on NoC-based communication. Indeed, with a good spare core placement, not
only the distances between the spare and faulty cores decrease, but also the failures
propagation to the rest of the system is avoided.
e12
v3
v6
v4
v5
v2
e13
e34e24
e45
e56
e16
e61
v1
Figure 6.4 (a) Application Characterization Graph (ACG) (b) Spare cores (‘S’) are assignedtowards the side of the system. (c) Spare cores ‘S’ are randomly distributed in the system (d)Spare cores ‘S’ are evenly distributed in the system.
ACG = (V, E)
!
: existing tasks
: incoming tasks
: Spare core
: MAnager core
: permanent faulty core
: transient fault on resource r20
: failure contamination area (FCA): migration from faulty core to spare
(a)
(b) Case 1: Side (c) Case 2: Random
: MEMory
incoming app.
MA
S
MEM
0
1
2
3
4
S
S
v1
v3
v5
v2v4!
xy
v6
MA S
MEMMEM MAMEM5
0 1 2 3 4 50
1
2
3
4
0 1 2 3 4 5xy
v3
v5
v1
v4 v2! v6
MA S
SS
MEMMEM MAMEM5
0
1
2
3
4
S
S
v1
v3
v5
v2v4!
xy
v6
MA
S
MEMMEM MAMEM5
0 1 2 3 4 5
(e) Case 3: Uniform

127
Assume that an incoming application (see its ACG in Figure 6.4(a)) needs to be
mapped onto a 6 × 6 NoC platform interconnected via a mesh network under wormhole
switching and XY routing (if there exists failed links, use minimal-path routing instead).
Each resource rmn is located in the NoC at the intersection of mth row and nth column.
Several spare core placement schemes are studied here: Case 1) Side assignment: Assign
the spare cores to the side of the system (shown in Figure 6.4(b)), Case 2) Random
assignment: Randomly distribute the spare cores in the system (shown in Figure 6.4(c)),
and Case 3) Uniform assignment: Evenly distribute the spare cores in the system (shown
in Figure 6.4(d)), Case 3).
Intuitively, the distance among the active cores in Case 2 and Case 3 is higher than
that in Case 1 since the system size grows by involving the spares; this, in turn, results in
higher communication energy consumption and lower system performance. For example,
it can be seen that for the incoming application in Figure 6.4(b) and (c),
MD(e12) = MD(e13) = 1 in Case 1, while MD(e13) = 3 in Case 2. However, when a
transient fault occurs at core r20, the master will assign the closest spare to recover the
fault. Therefore, cores r25 and r11 are selected in these two cases which means that the
distance between the faulty core and the closest spare is 5 and 2, respectively. Moreover,
we define the failure contamination area (FCA) to reflect the failure propagation
probability, namely the greatest area resulting from the communication re-routing while
replacing the faulty core with a spare. As seen in Figure 6.4(a), since vertices v2, v3 and
v5 have the communication with vertex v4, the FCA in Case 1 is much higher than that in
Case 2. Shown as the thick frames in Figure 6.4(b), (c), and (d), the FCA value in Cases
1 and 2 is 18 and 6, respectively; this may further degrade the performance of some other
existing application shown with black dots in the system.
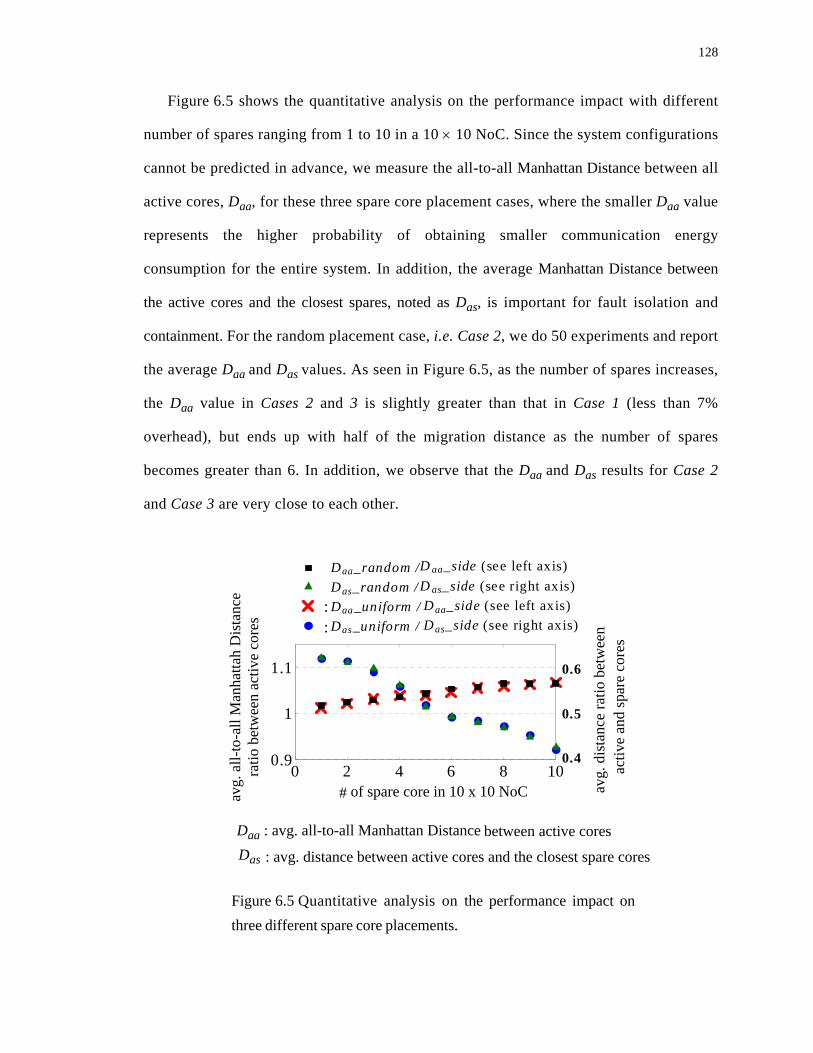
128
Figure 6.5 shows the quantitative analysis on the performance impact with different
number of spares ranging from 1 to 10 in a 10 × 10 NoC. Since the system configurations
cannot be predicted in advance, we measure the all-to-all Manhattan Distance between all
active cores, Daa, for these three spare core placement cases, where the smaller Daa value
represents the higher probability of obtaining smaller communication energy
consumption for the entire system. In addition, the average Manhattan Distance between
the active cores and the closest spares, noted as Das, is important for fault isolation and
containment. For the random placement case, i.e. Case 2, we do 50 experiments and report
the average Daa and Das values. As seen in Figure 6.5, as the number of spares increases,
the Daa value in Cases 2 and 3 is slightly greater than that in Case 1 (less than 7%
overhead), but ends up with half of the migration distance as the number of spares
becomes greater than 6. In addition, we observe that the Daa and Das results for Case 2
and Case 3 are very close to each other.
0.6
0.5
0.4
Daa_random / Daa_side (see left axis)Das_random / Das_side (see right axis)
0 2 4 6 8 100.9
1
1.1
::
0.6
0.5
0.4
Daa_uniform / Daa_side (see left axis)Das_uniform / Das_side (see right axis)
Daa_random / D aa_side (see left axis)Das_random / D as_side (see right axis)
Figure 6.5 Quantitative analysis on the performance impact onthree different spare core placements.
# of spare core in 10 x 10 NoC
Daa : avg. all-to-all Manhattan Distance
Das : avg. distance between active cores and the closest spare cores
avg.
all-
to-a
ll M
anha
ttah
Dis
tanc
e
ra
tio b
etw
een
activ
e co
res
avg.
dis
tanc
e ra
tio b
etw
een
activ
e an
d sp
are
core
s
between active cores

129
In conclusion, distributing spares at random or evenly within the system slightly
increases the all-to-all Manhattan Distance among the active cores. This may causes some
communication energy consumption during the mapping process, but it maintains useful
levels of fault isolation and containment compared to the scenario when spares are placed on
the sides. More evaluations on system throughput for spare core placement are shown in
Section 6.6.2.
6.4. Investigations Involving New Metrics
In practice, applications can enter and leave the system dynamically and since the faults
existing in the system can be transient or intermittent, the locations of faulty cores may
change at run-time. Therefore, our goal is to find a mapping function, map( ), for allocating
the incoming application tasks (see application modeling in Section 2.2) to the reachable,
available and fault-free cores on a non-ideal 2D mesh NoC platform (see Figure 6.1) such that
i) the communication energy consumption is minimized ii) the network contention is
minimized and iii) the entire system performance is maximized. Of note, the applications
execution time and their relative ordering are not known in advance, thus considering the entire
system optimization during mapping is the critical challenge for solving this problem. Again,
the application modeling and the communication energy modeling have been described in
Section 2.2 and Section 2.3, respectively. Even though we assume the platform under
consideration is based on a 2-D tile-based architecture and a wormhole switching scheme, we
emphasize that our proposed algorithms can be extended for other irregular topologies with
other switching schemes.
Three new performance metrics are defined next in order to reach these three goals of
finding the FT mapping function, map( ), as mentioned.

130
1. Weighted Manhattan Distance (WMD): Let vertices vi and vj be mapped onto resources
rab and rcd, respectively. The weighted Manhattan Distance between any two vertices is
defined by
comm(eij) × MD(map(vi) , map(vj)) = comm(eij) × (|a-c| + |b-d|) (6.1)
Based on the bit energy metric [170], it is obvious that the weighted Manhattan distance
is positively correlated with the communication energy consumption.
2. Link Contention Count (LCC): The link contention occurs when two communication
flows eij and ekl from the same or different ACGs, where i k and j l, contend for the
same link somewhere in the network. Such link contention can produce a significant
degradation on system performance.
3. System Fragmentation Factor (SFF): This factor reflects the degree to which the non-
contiguity of one application may affect other regions where vertices in different applications
may be allocated to. The system fragmentation factor is defined as
(6.2)
where w and h are the width and the height of the minimal enclosing rectangle covering
the mapping solution of ACG = (V, E), while f and s are the number of faulty cores and spares
in that rectangle, respectively. Therefore, the smaller SFF value for each application on the
system is a good indication of optimizing the entire system performance.
One example can be seen in Figure 6.6 where two possible mapping results (map( ) and
map’( )) are shown with solid and dotted circles, respectively. With the same ACG shown in
Figure 6.4(a), the WMD of vertex v1 and vertex v6 in map( ) is r(e16) × 2, while in map’( ) is
r(e16) × 5. Under the routing referring to Figure 6.6, the LCC in map( ) for the ACG is 1
(i.e. e13 and e24 share the same link,); the LCC in map’( ) is 5. In addition, the SFF in map( )
≠ ≠
SFF w h× V– f– s–w h×
-----------------------------------------=

131
for the ACG is 0.11 = 1/9 while that in map’( ) is 0.33 = 4/12. As seen, the larger the SFF, the
more interference exists between the cores from different applications (see the dashed line in
Figure 6.6(b)).
Now, we evaluate the composite effect of these three metrics (i.e., WMD, LCC, SFF) on
the average packet latency2. Several ACGs are generated using the TGFF package [162],
where the number of vertices ranges from 5 to 15. Then, we implement three different
scenarios (i.e., Random mapping (Random), Multiple Buddy Strategy (MBS) [99] and Nearest
Neighbor approach (NN) [27]) for allocating application tasks onto a 10 × 10 NoC with
randomly selected faulty and spare cores. For each scenario, the average packet latencies, as
well as the average values of the three metrics defined above are calculated for twenty
different system configurations.
We employ 3D Kiviat graphs to provide a composite view of the impact of these three
metrics [112]. A Kiviat graph consists of three dimensions, each representing one of the
aforementioned metrics emanating from a central point, as seen in Figure 6.7. Each metric
2. Of note, our objective function (i.e. system performance and communication energy consumption) ispositively correlated with the average packet latency [27][79].
Figure 6.6 Two mapping results for the ACG in Figure 6.4(a)where the spare cores are randomly placed on the platform.
(a) map( ) (b) map’( )
0
1
2
3
4
S
S
xMA S
MEMMEM MAMEM5
0 1 2 3 4 5
v6
v4
v5
v3v2v1
y
0
1
2
3
4
S
Sv1
v3
v5
v2v4
xy
v6
MA S
MEMMEM MAMEM5
0 1 2 3 4 5

132
varies from zero to the largest value observed in the experiments. As shown, the composite
view of three metrics lies within the shaded area. Intuitively, the smaller the area, the better
the system performance and the lower communication energy consumption corresponding to a
particular approach is.
Table 6.1 reports the values of these three metrics and the corresponding Kiviat area,
i.e. (K( )), while the system latency is measured in cycles and the communication energy
consumption is normalized to the Random approach. As we can see, due to its smaller
Kiviat area, the NN approach performs better and consumes lower communication energy
than the MBS and random approaches.
Table 6.1 Comparison among the Random, MBS [99], and Nearest Neighbor (NN) [27]
mapping methods.metrics \ mapping scenario Random MBS [99] NN [27]
WMD 0.95 0.60 0.2LCC 0.93 0.60 0.57SFF 0.94 0.85 0.58
Kiviat area 1.1478 0.5975 0.2427average packet latency 342.1 148.27 94.22
normalized comm. energy consumption 1 0.48 0.32
Figure 6.7 3D Kiviat plots showing WMD, LCC, and SFF metrics forthree difference mapping schemes (i.e., Random, MBS, and NN).
(a) Random (b) MBS (c) NN
WMD
LCC SFF
WMD
LCC SFF
WMD
LCC SFF
•

133
6.5. Fault-Tolerant Resource Management
In general, the FT resource management covers i) migrating tasks from faulty cores to
spares (discussed in Section 6.5.1) and ii) allocating the incoming application tasks to
available, reachable, and faulty-free cores (discussed in Section 6.5.2). The platform and
application models have been discussed in Section 2.1 and Section 2.2, respectively. Here,
we define some properties before formulating the FT scheme:
• There are two sets of cores/tiles rmn in the NoC platform, namely {CP, MEM} (see the
‘CP’ and ‘MEM’ cores in Figure 6.1)3.
• All applications have been done the off-line analysis and described by ACG = (V, E)
(see Section 2.2), where the type of each vertex vi, type(vi), can be either ‘t’ (i.e.,
representing a cluster of tasks) or ‘b’ (i.e., representing a buffer or memory unit). Tasks
belonging to the same cluster/vertex should run on their own defect-free computational
core (‘CP’), while the buffer module should be assigned to the memory tile ‘MEM’ of
the NoC platform.
• For rmn CP, s(rmn) stands for the status of core located at rmn. s(rmn) = -3 if the core
is assigned to be a spare, s(rmn) = -2 if the core is permanent faulty, s(rmn) = -1 if
the core is affected by transient or intermittent faults, s(rmn) = 0 if the core has
been already assigned to some application and s(rmn) = 1 if the core is idle/
available.
• map( ): vi map(vi) = rmn stands for a mapping function from one vertex to one
core.
3. As explained in Footnote 2 of Chapter 2, we may have memory module inside the MPSoC plat-form for memory intensive applications, as well as some vertices being characterized as a buf-fer unit in applications.
∈
→

134
The FT resource management strategy is described in Figure 6.8. Of note, in this chapter,
we assume that the failure rate of each core is updated based on the temperature of the core. In
addition, we apply the reactive task migration4 on faulty cores (see Section 6.5.1). As seen,
our scheme supports multiple applications entering and leaving the system dynamically (see
Section 6.5.2) and the distributed managers keep track of the cores status.
6.5.1. RUN_MIGRATION Process
Similarly to the control scheme in [117], our NoC platform includes the data and control
network. The reactive task migration procedure is given in Figure 6.9.
We note the FCA value in Step 02 (Figure 6.9) is highly dependent on the spare core
placement where its impact are evaluated in Section 6.3.2. The run-time and energy overhead
of Steps 1 and 3 are discussed in [19][161] based on the process response time and code
4. The reactive task migration process implies that after one core fails, it will be replaced by a spare,while the proactive task migration implies that the system manager monitors the failure probabilityof each core and migrates a failure-prone core to the spare before it actually fails. Although wefocus on the former scheme, it can be easily extended to become a proactive scheme with additionalNoC monitoring [84][117].
Figure 6.8 The FT resource management framework.
while(1){
if (faults are detected at rmn && migration is necessary)
RUN_MIGRATION(rmn);
if (one application ACGQ enters && resources are enough)
map(vi V in ACGQ) =RUN_FT_MAPPING(conf , ACGQ);
if (one application ACGP leaves) update rmn status where
rmn map-1(vi V in ACGP), s(rmn) 1;
}
∈
∀ ∈ ∈ →

135
sizes at task- and resource-level and is out of the scope of this work. Indeed, we consider
here task migration at system-level so we focus on spare core placement, spare selection for
faulty core replacement, etc. instead of showing the details of the task migration at task- and
resource-level (i.e., setup the interrupts in the codes for doing the migration, etc).
6.5.2. RUN_FT_MAPPING Process
Problem Formulation
Given the current system configuration, conf, and the incoming application ACGQ
Find map( ): vi map(vi) = rmn, vi V in ACGQ which minimizes the Kiviat area,
i.e. (K( )) corresponding to the three metrics, WMD, LCC, and SFF
Such that:
vi vj V, map(vi) map(vj) (6.3)
vi V and type(vi) = ‘t’, map(vi) = rmn CP and s(rmn) = 1 (6.4)
vi V and type(vi) = ‘b’, map(vi) = rmn MEM (6.5)
Figure 6.9 Main steps of RUN_MIGRATION process.
01: The failed core tmn sends out the message to themanager through the control network.
02: The distributed manager searches the closest availablespare which results in a smaller FCA value.
03: Execute the code migration or related data transmissionthrough the data network.
→ ∀ ∈
•
∀ ≠ ∈ ≠
∀ ∈ ∈
∀ ∈ ∈

136
Equation 6.3 means that each vertex should be mapped to exactly one tile and no tile can
host more than one vertex. Equation 6.4 and Equation 6.5 imply that the vertices should be
assigned to the correct type of resources in the system.
RUN_FT_MAPPING Algorithm
Any run-time algorithm must be lightweight and have a low energy consumption. Hence,
we define a few variables to achieve such a goal. For each tile t, the number of available (and
non-faulty) neighboring cores is stored in the variable neighbor[t], while the center of the
current resulting region R is stored in the variable center[R]. ED(tij , tkl) stands for the
Euclidean Distance between tiles tij and tkl, i.e. ED(tij , tkl) = (|i - k|2 + |j - l|2)1/2.
The steps of the RUN_FT_MAPPING algorithm are shown in Figure 6.10. We assume the
number of vertices of type ‘b’ and ‘t’ in the incoming ACG are S1 and S2, respectively.
In Steps 01-07, we select a region from the current system configuration with the goal of
minimizing the SFF; this helps reducing the LCC caused by different applications. Also the
number of cores belonging to the MEM and CP set should be equal to the number of vertices of
types ‘b’ and ‘t’ in ACG. Then, in Steps 08-10, we assign vertices to the selected region with
the goal of minimizing the WMD and LCC caused by this incoming application. With the
minimization of these three metrics, we seek to get a smaller Kiviat area through the
incremental mapping process.
The run time complexity of the FT algorithm is O(VlogV + ElogE). In Steps 03-07, if we
can search the possible tiles and store the information of neighbor[tmn] + ED(tmn, center[R])
of this wavefront in a HEAP, the complexity is O(VlogV). In Steps 08-10 with another HEAP
structure, it takes O(ElogE) to get the next un-assigned vertex from ACG and O(VlogV) to
find an available tile for it inside the region R. Of note, our FT approach can be implemented

137
on platforms that support different topologies (i.e., torus, or even irregular networks) by
modifying the neighbor[t] value accordingly.
Figure 6.10 Main steps of RUN_FT_MAPPING process.
Input: (1) current system configuration, conf
(2) one incoming application ACGQ = (V, E)
Output: mapping solutions for all vertices in ACGQ to the fault-free and thecorresponding types of cores.
01: Set a region R
02: If S1 > 0, mode = 1; otherwise, mode = 2.
03: If mode = 1, select a core rmn MEM with minimum code transfer energyconsumption and R R {rmn}, then go to 04. If mode = 2, randomly select atile rmn CP and R R {rmn}, then go to 06.
04: If S1 > (# of cores MEM in R), then select rmn MEM with smallestneighbor[rmn] + ED(rmn, center[R]) and R R {rmn}
05: Repeat 04 until S1 = (# of cores MEM in R), then go to 06.
06: If S2 > (# of cores CP in R), then select rmn CP with smallest value of
neighbor[rmn] + ED(rmn, center[R]) and R R {rmn}
07: Repeat 06 until S2 = (# of cores CP in R), then go to 08.
08: Start with vertex vk in ACG with the largestvalue and map it onto rmn CP or MEM closest
to center[R] if type(vk) = ‘t’ or ‘b’.
09: Pick an unassigned vertex vi with the largest comm(eki) + comm(eik) value toall assigned vertices vk in ACGQ, and map it onto one available core rmn in R (i.e.map(vi) = rmn) such that the WMD value between vi and all other assigned vk isminimized. If more than one tile is satisfied, select one which results in thesmallest LCC value.
10: Repeat 09 until all vertices get assigned to tiles selected in R.
∅←
∈← ∪
∈ ← ∪
∈ ∈← ∪
∈
∈ ∈
← ∪
∈
comm eki( ) comm eik( )+i 1 V∼=
∑ ∈
138
6.6. Experimental Results
6.6.1. Evaluation with Specific Patterns
In this section, we evaluate our FT mapping algorithm using a set of widely-used
workloads consisting of 1) communication-intensive applications with all vertices
communicating in an all-to-all fashion and 2) applications where all vertices communicate
with each other through a central memory only (denoted as one-to-all communication).
Several sets of applications are generated using the TGFF package [162] with the number of
vertices ranging from 5 to 35 in one ACG. The communication rates are randomly generated
according to some specified distributions. The sequences of incoming applications are also
generated randomly.
In terms of spare cores, we consider two spare core placement scenarios: 1) Side
placement, where all spares are assigned towards the sides and 2) Random placement, where
spares are randomly distributed across the platform. Also, 10% of the computational cores are
assumed to be permanently faulty due to the manufacturing process and randomly distributed
across the platform. As observed, the uniform spare core placement scenario (Case 3
discussed in Section 6.3.2) gives similar results to the random spare core placement; here we
report only the comparison between side and random placements.
To have a more accurate fault model, we use thermal modelling via HotSpot [73] to
estimate the temperature of each active computational core. We set the failure rate per cycle
for each core (at a room temperature of 25 C) to 10-9. Therefore, the estimated failure rate of
each core would be updated using the Arrhenius model [76] based on the temperature
obtained from the thermal measurements. In addition, in terms of the failure rate of the
memory, Alion System Reliability Analysis Centers report that the memory mean-time-
between-failure rates are around 700 years [74]. Also, since the on-chip buffer/memory
°

139
tiles benefit from built-in-self diagnostics and repair schemes, we assume that permanent
failures in memory do not occur at simulation.
Table 6.2 shows the throughput and communication energy consumption comparison
for two mapping approaches, namely 1) our proposed FT mapping (FT) and 2) Nearest
Neighbor (NN) [27]5, an heuristic which maps vertices with higher communication as closely
as possible, for NoCs of different sizes. All results are experimented from an NoC simulator
using C++ language.
As seen in Table 6.2 for the all-to-all communication, our proposed technique (FT)
achieves indeed a higher throughput and has a lower communication energy consumption
compared to the NN approach, especially for larger NoC platforms. Of note, our FT
approach works even better when the spares are located randomly in the platform
compared to the NN approach. For one-to-all communication, the system performance
cannot improve much since the bottleneck is mainly due to the memory module (i.e.,
accessing data to/from memory). Despite this, we still can achieve more communication
energy savings compared to the NN approach.
5. Even though the path load approach proposed in [27] performs the best, it does not consider any typeof failures in the cores of the platform so it is not directly comparable with our FT approach.
Table 6.2 Throughput and Energy Consumption between proposed FT and Nearest Neighbor (NN) approaches for all-to-all and one-to-all communication patterns.
space core placement-Side space core placement-Random
specific ACGs in different NoC size
throughput improvement (FT vs. NN)
comm. energy consumption
savings(FT vs. NN)
throughput improvement (FT vs. NN)
comm. energy consumption
savings(FT vs. NN)
5 × 5 all-to-all 23.2% 12.5% 23.5% 15.8%10 × 10 all-to-all 98.1% 32.1% 102.1% 36.2%30 × 30 all-to-all 163.2% 77.3% 178.2% 85.2%5 × 5 one-to-all 3.4% 13.8% 4.1% 17.8%
10 × 10 one-to-all 5.7% 17.5% 6.9% 23.6%30 × 30 one-to-all 19.4% 32.8% 25.9% 54.1%
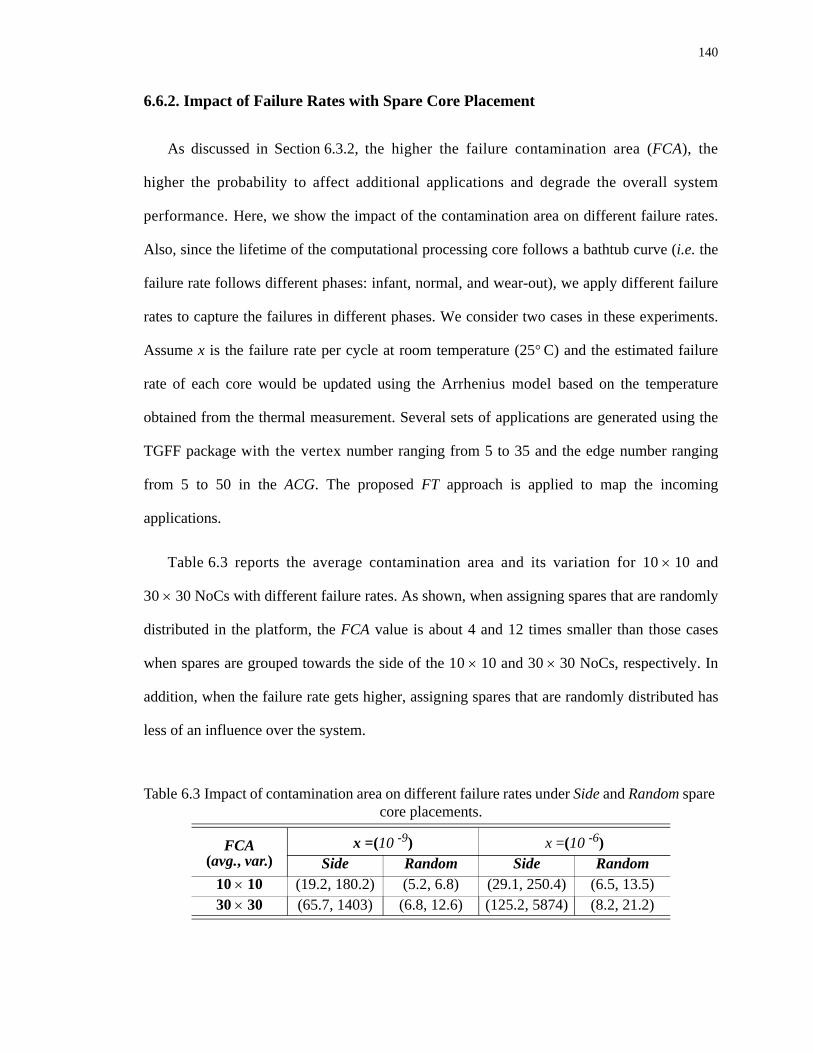
140
6.6.2. Impact of Failure Rates with Spare Core Placement
As discussed in Section 6.3.2, the higher the failure contamination area (FCA), the
higher the probability to affect additional applications and degrade the overall system
performance. Here, we show the impact of the contamination area on different failure rates.
Also, since the lifetime of the computational processing core follows a bathtub curve (i.e. the
failure rate follows different phases: infant, normal, and wear-out), we apply different failure
rates to capture the failures in different phases. We consider two cases in these experiments.
Assume x is the failure rate per cycle at room temperature (25 C) and the estimated failure
rate of each core would be updated using the Arrhenius model based on the temperature
obtained from the thermal measurement. Several sets of applications are generated using the
TGFF package with the vertex number ranging from 5 to 35 and the edge number ranging
from 5 to 50 in the ACG. The proposed FT approach is applied to map the incoming
applications.
Table 6.3 reports the average contamination area and its variation for 10 × 10 and
30 × 30 NoCs with different failure rates. As shown, when assigning spares that are randomly
distributed in the platform, the FCA value is about 4 and 12 times smaller than those cases
when spares are grouped towards the side of the 10 × 10 and 30 × 30 NoCs, respectively. In
addition, when the failure rate gets higher, assigning spares that are randomly distributed has
less of an influence over the system.
Table 6.3 Impact of contamination area on different failure rates under Side and Random spare core placements.
FCA (avg., var.)
x =(10 -9) x =(10 -6)Side Random Side Random
10 × 10 (19.2, 180.2) (5.2, 6.8) (29.1, 250.4) (6.5, 13.5)30 × 30 (65.7, 1403) (6.8, 12.6) (125.2, 5874) (8.2, 21.2)
°

141
6.6.3. Evaluation with Real Applications
We evaluate the potential of our algorithm on several real applications, namely five
benchmarks from the Embedded System Synthesis Benchmarks Suite [50], a video object
plane decoder, the MPEG4 decoder, picture-in-picture, and multi-window display
applications, where the last four applications include several memory modules. The
ACGs of these nine applications are built through an off-line analysis; applications are
randomly selected to enter and leave the system.
The Nearest Neighbor (NN) mapping approach in [27] is evaluated against our FT
method. Also, the comparison of 1) the average packet latency (i.e., the time elapsed between
packet generation at the source core and packet arrival at the destination core, in cycles), 2)
communication energy consumption, and 3) the Kiviat area, on these approaches are given in
Table 6.4. In each run, 5%-15% of the computational cores are assumed to be
permanently faulty and randomly distributed in the system. We report the average results
of running 50 runs for each mapping approach under different NoC sizes (e.g. 10 × 10
NN). We note that the range of each metric in the Kiviat graph is normalized from zero to the
largest value observed in random mapping implementation. The same fault model is applied
as that in Section 6.6.1. In addition, the overhead of the energy consumption for running
our FT algorithm is included in the communication energy consumption measurement.
As shown in Table 6.4, our approach can obtain lower average packet latency and smaller
communication energy consumption compared to the NN approach. The data of the Kiviat
area also imply that by minimizing the WMD, LCC, SFF metrics, we are able to reduce the
average packet latency quite significantly; this, in turn, increases the system performance and
decreases the communication energy consumption. The run-time overhead for running the FT
(see Figure 6.10) and NN approaches on a 100MHz MicroBlaze processor acting as a

142
distributed manager is, on average, 68μs and 46μs, respectively; these values are well suited
to this kind of on-line optimizations.
6.7. Summary
In this chapter, we have proposed a system-level fault-tolerant approach addressing the
problem of run-time resource management in non-ideal multiprocessor platforms where
communication happens via the NoC approach. The proposed application mapping techniques
in this new framework aim at optimizing the entire system performance and communication
energy consumption, while considering the static and dynamic occurrence of permanent,
transient, and intermittent failures in the system. As the main theoretical contribution, we have
analyzed the main factor of producing network contention and addressed the spare core
placement problem with its impact on system fault-tolerant (FT) properties. Then we have
investigated several critical metrics and provided insight into the resource management
process. Finally, a FT application mapping approach for non-ideal multiprocessor platforms
has been presented. Experimental results have shown that our proposed approach is efficient
and highly scalable; significant throughput improvements can be achieved compared to the
existing solutions that do not consider possible failures in the system.
Table 6.4 Comparison between the Nearest Neighbor (NN) and our FT mapping results on the overall system performance.
NoC size mapping approach avg. latency
normalized comm. energy consumption
Kiviat area
10 × 10NN [27] 105.37 1 0.264
FT 63.82 0.54 0.051
20 × 20NN [27] 191.28 1 0.351
FT 67.33 0.37 0.042
30 × 30NN [27] 275.12 1 0.383
FT 66.33 0.29 0.021

143
7. USER-AWARE DYNAMIC TASK ALLOCATION
7.1. Introduction
As discussed in Figure 1.3, for multiple use-case NoCs (such as Tile64TM by Tilera
[164] which deliver high performance computing for embedded applications), different
system configurations resulting from unpredictable failures (presented in Chapter 6) or
multi-user behaviors are too dynamic and too complex in nature to be modeled off-line.
As discussed about the user-centric design flow (see Figure 1.8), even though after having
generated NoC platforms which exhibit less variation among the users’ behavior (see
Chapter 4), there still exists some variation between the targeted platform and users within
each cluster (see the distance between the squares and the dots belonging to that cluster in
Figure 1.1). Therefore, the need for more sophisticated light-weight run-time optimization
for maximizing the user satisfaction and adapting to different user needs becomes
apparent (see the arrows in Figure 1.1). This chapter focuses on the resource management
problem, more precisely, task allocation problem while taking the user behavior into
consideration1.
The task allocation problem has been a key issue for performance optimization in parallel
and distributed systems [10][15][16][29][95][98][99][165]. To date, contiguous (see
Figure 7.1(a)) and non-contiguous (Figure 7.1(b)-(e)) allocation techniques have been
1. Our user-centric run-time optimization proposed in this chapter can also be applied to the non-idealplatform, i.e. platform with permanent, transient, or intermittent faults discussed in Chapter 6.
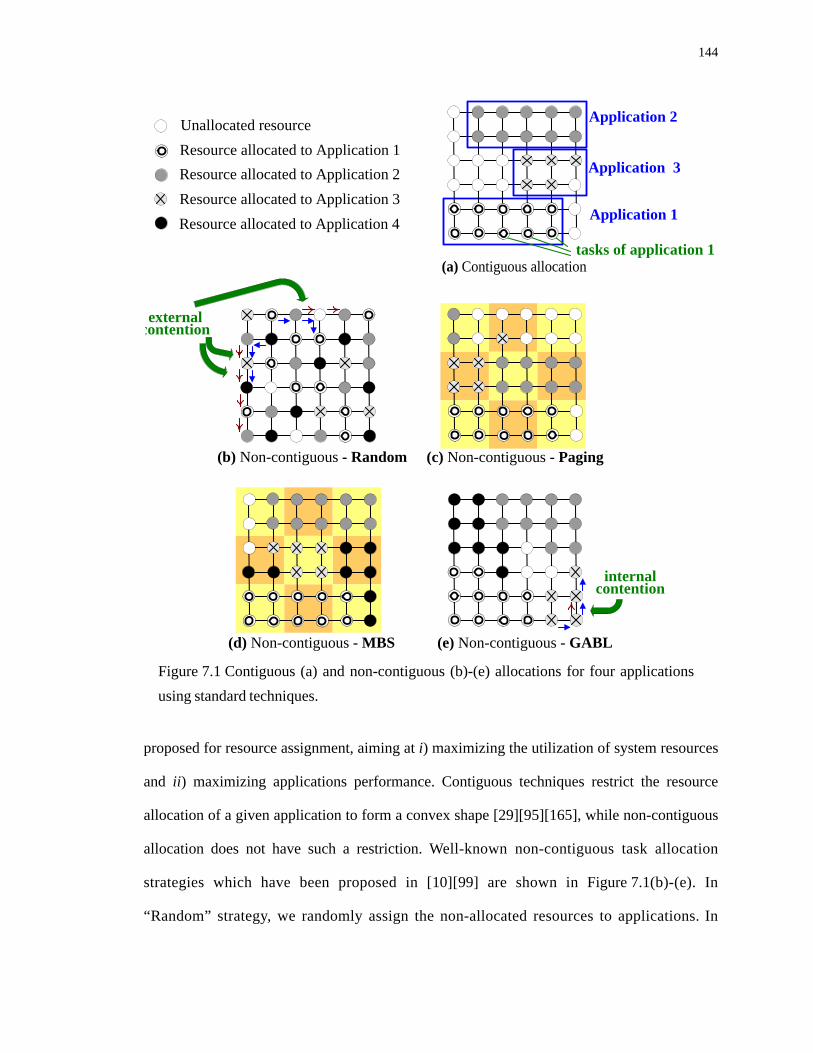
144
proposed for resource assignment, aiming at i) maximizing the utilization of system resources
and ii) maximizing applications performance. Contiguous techniques restrict the resource
allocation of a given application to form a convex shape [29][95][165], while non-contiguous
allocation does not have such a restriction. Well-known non-contiguous task allocation
strategies which have been proposed in [10][99] are shown in Figure 7.1(b)-(e). In
“Random” strategy, we randomly assign the non-allocated resources to applications. In
Unallocated resourceResource allocated to Application 1Resource allocated to Application 2Resource allocated to Application 3
external contention
Application 1
tasks of application 1
internal contention
Resource allocated to Application 4
Application 2
Application 3
Figure 7.1 Contiguous (a) and non-contiguous (b)-(e) allocations for four applicationsusing standard techniques.
(b) Non-contiguous - Random (c) Non-contiguous - Paging
(d) Non-contiguous - MBS (e) Non-contiguous - GABL
(a) Contiguous allocation

145
“Paging” and “Multiple Buddy Strategy (MBS)”, the mesh network is divided into non-
overlapping sub-meshes initially. “Paging” selects the non-allocated sub-meshes in row-
major order, while “MBS” allocates applications to contiguous sub-meshes if possible.
“Greedy-Available-Busy-List (GABL)” allocates resources from the largest free sub-
mesh of any size. The contiguous strategy achieves only 34% to 66% resource utilization
[95], while the latter can reach up to 78% [165]. However, the performance of non-contiguous
allocation may suffer due to internal and external contention caused by messages originating
from the “same” or “different” applications, respectively, contending for the same link. Of
note, there is no external contention for contiguous allocation (see Figure 7.1(a)) because the
tasks of the same application belong to a convex region, while tasks from different
applications do not communicate among them (also, application tasks are not reallocated
once they start executing).
The resource management techniques proposed so far for SoCs rely on a resource
manager operating under the control of an operating system (OS) [117]; this allows the
system operate effectively in a dynamic manner. Since SoC design is moving towards a
communication-centric paradigm [17], new metrics (e.g., physical links with limited
bandwidth, communication-energy minimization) need to be considered in the resource
management process. Indeed, with inadequate task assignment, the system will likely perform
poorly. As an example, the “Random” case in Figure 7.1(b) causes severe internal/external
network contention; this contention incurs a longer transmission latency and smaller system
throughput.
This chapter focuses on proposing an effective run-time resource management onto
embedded NoC-based MPSoC. Given that the arrival order and the execution time of the
target applications is not known a priori, achieving effective run-time resource management
on such platform is a challenging task. Of note, as discussed in Figure 6.3.1, the path-based

146
internal and external contention especially have large impact on system performance.
Compared to Chapter 5, Chapter 6, and the previous work, our contributions in this chapter
are as follows:
• Propose strategies for minimizing the path-based internal and external network
contention.
• Present algorithms for resource management while incorporating certain user
characteristics to better respond to run-time changes.
• Propose light-weight machine learning techniques for learning structures with critical
parameters/thresholds which are able to adapt to different types of users.
Different users result in different system configurations which cannot be predicted and
modeled at design time. Consequently, how to react to run-time stimuli the system receives,
while maintaining high performance is our main objective in this chapter. The best known
example for considering external interactions (e.g., human users) to the electronic devices is
perhaps the e-commerce site “Amazon.com”. An interface collecting various data on user
activity (e.g., who is interested in what and when) helps the search engine recommend users
what products to buy. Also, the context-aware mobile computing utilizes wearable sensor
devices for sensing the users and their current state to exploit the context information and
reduce the demand for human attention [77].
We believe that our approach aimed at incorporating the user behavior in resource
management can automatically adapt to different user needs. In other words, the technique is
well-suited to be embedded in future products belonging to the second and third categories in
Table 1.1.
This chapter is organized as follows: In Section 7.2, we review related work. The system
description and our newly proposed methodology are described in Section 7.3. The run-time

147
task allocation problem is formulated in Section 7.4 and efficient algorithms to solve it are
presented in Section 7.5. The on-line light-weight user model learning process is explained in
Section 7.6. Experimental results in Section 7.7 show the kind of communication energy
savings that can be achieved by considering the user behavior. Finally, we summarize our
contribution in Section 7.8.
7.2. Related Work
The resource management problem has been addressed in the literature in various contexts
like supercomputers, parallel and distributed systems, SoCs, etc. While having the goal of
maximizing the system performance, many techniques such as partitioning, mapping,
scheduling, resource sharing, load balancing have been proposed to date. Pastrnak et al.
present methods such that several tasks can run concurrently by exploiting the task- and data-
level parallelism [127]. Chang et al. address the coarse-grain task partitioning and clustering
problem to preserve the modularity of the initial application description [29]. Moreira et al.
propose an online resource allocation heuristic for multiprocessor SoCs which can achieve
utilization values up to 95% [111]. Nollet et al. apply task migration to improve the system
performance by reconfiguring the hardware tiles [118] and propose the adaptive routing to
ensure the quality-of-service requests of various applications [117]. Smit et al. propose a run-
time task assignment algorithm on heterogeneous processors [154] targeting on the current
system configuration.
Some prior work does consider the whole system configuration. For instance, Murali et al.
propose an off-line methodology for mapping multiple use-cases (with different
communication requirements and traffic patterns) onto NoCs [105]. Also, Pop et al. present
the incremental design approach of distributed systems for hard real-time applications over a
bus [130].

148
With the ever-increasing connectivity between systems and users, how to design an
electronic system which can examine and mediate people’s interactions is becoming an
important challenge. We first addressed the run-time task allocation problem on NoC-based
platforms, while considering the user behavior in [36]. Then, we generalize the technique in
[36] to include the user behavior and pre-defined user model in the energy optimization
process and then propose a light-weight machine learning technique for boosting the user
model at run-time. We show that by taking the user behavior into consideration during the
task allocation process and building a specific model for each user, the system can respond
much better to run-time changes and adapt dynamically to user needs.
7.3. Preliminaries and Methodology Overview
7.3.1. Motivational Examples
Our motivational example of run-time task allocation with user behavior taken into
consideration is given in Figure 7.2. When an event occurs (e.g., an application enters the
system), our objective is to allocate the tasks belonging to this application to the available
resources on the platform such that the path-based internal/external network contention
and communication cost can be minimized. In the remaining part of this chapter, the term
“internal/external contention” stands for path-based internal/external contention where it
occurs when two traffic flows which neither come from the same source, nor go towards the
same destination contend for the same links somewhere in the network (see definition in
Section 6.3.1). More precisely, reducing the internal contention always comes with the
benefit of minimizing the communication cost; however, this increases the probability of
external contention for additional mappings. More details can be found in the example
discussed in Figure 7.2. Figure 7.2(a) describes the characteristics of applications App 1 -

149
at time 4
Time
0 1 2 3 4
1
11
23
45
67
8
4 567 8
1213
1014
9
111213
10149
18161915
20 17
1816
17
1915
20
18 16171915
20
2122
2324
25
2122
232425
2122
232425
App 11
App 2 App 3 App 4 [0, App 1, 5][1, App 2, 6][2, App 3, 12][3, App 4, 13][4, App 5, 9]2 3
45
6 78
9
11
10 12
13 14
1516 17
18 19 2021
22 23
24 25
App 5
2 2
2
10 101010
1
1 1 1
1 2 2
2 2 25 5
5 5
at time 0 at time 1 at time 2 at time 3
12
3
12
3
12
3
12
3
12
3
12
3
12
3
12
3
12
3
12
3
12
3
12
3
12
3
12
3
45
67
8 45
67
8 45
67
8
45
67
8 45
67
8 45
67
8 45
67
8
111213
1014
9
111213
1014
91816
17
1915
20
4 567 8
4 567 8
4 567 8
111213
10149
111213
10149
111213
10149
111213
10149
111213
10149
18 16171915
20
18161915
2017
Approach 1: primarily minimize internal metrics
Approach 2: primarily minimize external metrics
Hybrid approach: user behavior considered
Figure 7.2 Motivational example of run-time resource management with user behaviortaken into consideration. (a) Application characteristics. (b) Events in the system. (c)(d)(e)Task allocation scheme under Approach 1, Approach 2, and Hybrid approach, respectively.
(a) Application characteristics (b) Events
(c)
(d)
(e)

150
App 5. More precisely, each vertex vi contains a cluster of tasks that will acquire a resource
later. Each edge eij represents the communication between two vertices vi and vj, while the
weight of each edge, r(eij), gives the corresponding communication rate (e.g., bits/sec).
Figure 7.2(b) shows the events in the system; one event [t1, Q, t2] represents App Q running
in the system from time t1 (sec) to t2 (sec) as defined in Section 2.3.1. Figure 7.2(c), (d), and
(e) show the system configurations at particular times 0, 1, 2, 3, and 4 under three different
approaches. At each specific time, a new application arrives in the system and creates a more
complex configuration. These three different approaches are as follows:
• Approach 1: Focus primarily on minimizing the internal contention and communication
cost; minimize the external contention only as a secondary goal.
• Approach 2: Focus primarily on minimizing the external contention; minimize the
internal contention and communication cost only as a secondary goal.
• Hybrid approach: A hybrid method consists of combining Approaches 1 and 2 with user
behavior taken into consideration.
As observed in Figure 7.2(c), when the system utilization increases, in Approach 1, the
remaining (available) resources are quite dispersed; this results in an increase of external
contention and incurs a higher communication overhead for additional mappings. On the
contrary, in Approach 2 (see Figure 7.2(d)), the regions occupied by applications (shown with
thicker lines) are near convex; this helps reducing the external contention and lessen the
additional communication costs. For example, as shown in Figure 7.2(d) at time 1, there is no
external contention under such configuration. However, the drawback of Approach 2 is that
with this near convex region limitation, we can only obtain the sub-optimal communication
cost for the incoming application. It is hard to judge which approach is an adequate solution to
the run-time task allocation problem, particularly when the application characteristics are not

151
known a priori. Therefore, in this chapter, we address this very issue and present a hybrid
allocation approach leveraging Approaches 1 and 2 while considering the user interaction with
the system.
Here, we consider at least one PE acting as a global manager which observes the user’s
behavior for a long session (or episode). Also, with the same example shown in Figure 7.2,
we assume that the manager predicts that applications App 2 and App 4 have a higher
probability to become critical applications since the former application has a higher
communication rate, while the latter one has a long presence in the system according to the
user’s behavior traces. In the hybrid approach, Approach 1 is applied only to the critical
applications.
In this example, we assume that the minimal-path routing is used to transmit data. For
simplicity, the communication cost (i.e. energy consumption in bits, EQ) of the event
[t1, Q, t2] is defined as follows:
(7.1)
where MD(vi , vj) represents the Manhattan Distance between any two vertices, vi and vj,
connected to each other in App Q. The event communication cost for each application under
different approaches is summarized in Table 7.1.
Table 7.1 Event communication cost [in bits] for three approaches and five applications entering in the system as shown in Figure 7.2.
App 1 App 2 App 3 App 4 App 5Approach 1 40 200 50 100 175Approach 2 40 250 60 120 125
Hybrid approach 40 200 60 100 125
EQ MD vi vj,( ) comm eij( )×( ) t2 t1–×i j,( ) in App Q∀
∑=

152
As shown in Figure 7.2(c), the internal contention is indeed minimized for the first four
applications and these four events consume the least amount of communication cost by time 3
(see Table 7.1 under Approach 1). However, the remaining (available) resources are quite
dispersed (see (Figure 7.2(c) at time 3)) when the system utilization increases; this results in
an increase of external contention and therefore it will incur a higher communication overhead
for any additional mapping. As shown in Table 7.1, the event communication cost for App 5
under Approach 1 is about 40% higher than those under Approach 2 and the hybrid approach.
On the contrary, in Approach 2, the regions occupied by applications (shown with thicker
lines) are near convex; this helps reducing the external contention and decreasing the
additional communication costs (compare Figure 7.2(c) and (d) at time 3). However, the
drawback of Approach 2 is that with this near convex region limitation, we can only obtain the
sub-optimal communication cost for the incoming application. In other words, it does not
work well when the system utilization is low (see Table 7.1 and compare the cost of App 2, 3,
and 4 of Approach 2 with that of Approach 1). For Approaches 1 and 2, it is hard to judge
which one is the adequate solution to the run-time task allocation problem, particularly when
the application characteristics are not known a priori.
Our motivation for applying the hybrid approach is to leverage the advantages offered by
both approaches 1 and 2; that is, we aim at balancing the internal/external contention and,
subsequently minimize the event communication cost (see Table 7.1). The basic idea is that,
by observing the user’s behavior, we can predict what the critical applications are and then
minimize their communication cost via Approach 1. Even if this may cause a larger external
contention, this can be later mitigated by applying Approach 2 to other applications.
Moreover, we observe that mitigating the internal and external contention reduces the
system fragmentation, which has a huge impact on system throughput. To show the influence
of system fragmentation on the mapping quality, we consider two scenarios for multiple

153
application mappings on 6 × 6 and 10 × 10 mesh NoCs, respectively, while considering fifteen
to twenty five vertices having all-to-all communication in each application: Scenario 1)
randomly and contiguously select the unused resources for each application Scenario 2) apply
either Approach 1 or Approach 2. We observe that the system throughput in the second
scenario improves by 45% and 108% compared to the first scenario, which implies that
mitigating the internal and external contention not only helps minimizing the communication
overhead for additional mappings, but also has a huge impact on maximum system
throughput.
Of note, the reallocation of resources to defragment the system, also called task migration,
is a complementary approach aimed at achieving load balancing and high resource utilization.
For distributed systems without shared memory support, the task migration policy must be
implemented by passing messages among resources; the implicit migration cost is large due to
the need of moving the process context [161]. Therefore, in this chapter, we do not consider
the task migration process. Instead, we target an run-time mapping process which does not
need to change the current system configuration.
7.3.2. System Description
As mentioned in Chapter 2, our embedded NoC platform is based on a 2-D mesh
architecture consisting of heterogeneous processing resources (i.e., master PEs running
the OS acting as global managers and several slave processor/PEs as shown in
Figure 2.1(a)). Each segmented link li between PEs has the same bandwidth B(li). We
further assume that each slave processor SPi has its computation capability, CC(SPi), with
level set from 1 to i. In addition, the slave processors in our system are processor-based
cores, e.g. Digital Signal Processor (DSP), ARM, and all application codes are compiled
already and stored in the global program memory where each slave process can easily access.

154
In the remaining part of the chapter, we may use the term “master PE” and “global manager
(GM)” alternatively when there is no ambiguity.
The real-time OS built in our embedded system is designed to be very compact and
efficient, such as Open AT OS provided by Wavecom [77]. We assume such OS supports non-
preemptive multi-tasking and event-based programming. More precisely, the OS control
mechanism as presented in Chapter 2 can be used to provide predictable and controllable
resource management, which includes monitoring the user’s behavior and making the task
allocation/mapping decision only when new events occur.
The communication infrastructure in such platform consists of a Data Network and a
Control Network (shown as solid and dotted lines, respectively, in Figure 2.1) which supports
minimal-path routing scheme2 and worm-hole switching. And the sum of all communication
flows passing through the link li cannot exceed its bandwidth B(li). Under such a platform,
the bit energy model as presented in Section 2.3.3 can be used to derive the communication
energy consumption of the entire system analytically. Assume now that applications enter
and leave the system at time t, where t is an integer. The total communication energy
consumed by some events in any session/episode si under a certain user model ST, during time
interval t = 0 ~ , is denoted by:
(7.2)
where is the length of session si and where stands for the communication
energy consumption of any application Q per time unit (see Section 2.3.3).
2. After the mapping of the incoming application is done, elimination of possible deadlocks betweenthe communication traces can be achieved by adding additional virtual channels in the router as apost-processing step [46]. In this chapter, we focus on the mapping step.
Tsi
Ecomm TsiST,( ) Ecomm
App Q ΔApp Q t( )t 1=
Tα
∑⎝ ⎠⎜ ⎟⎜ ⎟⎛ ⎞
×all applications
∑t 1=
Tsi∑=
TsiEcomm
App Q

155
7.3.3. Overview of the proposed methodology
We assume that all applications have been characterized by the Application Characteristic
Graph ACG = (V, E) as presented in Section 2.2. Our proposed methodology handling the
user-aware task allocation includes three stages as shown in Figure 7.3. In stage 1, when a
user starts first signing in the system, the master PE uses the default approach (i.e., Approach
2) for application mapping and, at the same time, records the user sequences that characterize
Figure 7.3 Overview of the proposed methodology. Default approach (i.e., Approach 2) isapplied in stage 1. Hybrid approach with pre-defined user model is applied in stage 2. Hybridapproach with on-line learned user model is applied in stage 3.
Done by Master Processor
Application Characteristics
EventTrigger
Approach 2
System Configuration
Application Characteristics
Pre-defined User Model
System Configuration
Application Characteristics
On-line Learned User Model
Minimize external
contention
Approach 2Minimize external
contention
Approach 1Minimize internal
contention
user sequences
user
sequ
ence
s
user
sequ
ence
s
user
sequ
ence
s
user
sequ
ence
s
user sequences
user sequences
user sequences
stage 1
EventTrigger
stage 2
Approach 2Minimize external
contention
Approach 1Minimize internal
contention
EventTrigger
stage 3
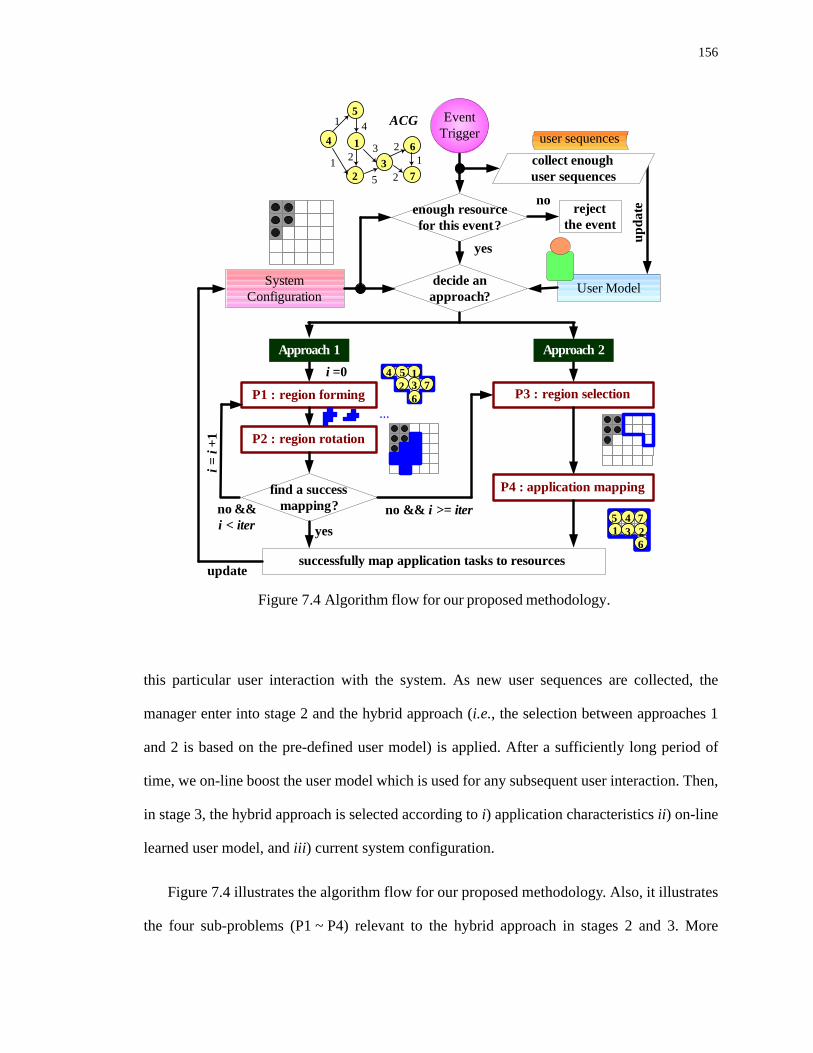
156
this particular user interaction with the system. As new user sequences are collected, the
manager enter into stage 2 and the hybrid approach (i.e., the selection between approaches 1
and 2 is based on the pre-defined user model) is applied. After a sufficiently long period of
time, we on-line boost the user model which is used for any subsequent user interaction. Then,
in stage 3, the hybrid approach is selected according to i) application characteristics ii) on-line
learned user model, and iii) current system configuration.
Figure 7.4 illustrates the algorithm flow for our proposed methodology. Also, it illustrates
the four sub-problems (P1 ~ P4) relevant to the hybrid approach in stages 2 and 3. More
Figure 7.4 Algorithm flow for our proposed methodology.
no
yes
upda
te
User ModelSystem Configuration
decide an approach?
user sequences
i =0
P1 : region forming
P2 : region rotation
Approach 1
find a success mapping?
yesno && i < iter
i = i
+1
P3 : region selection
P4 : application mapping
Approach 252 7
136
4
...
63
5 72
41
no && i >= iter
successfully map application tasks to resourcesupdate
ACG1
23
64
7
5
2
4
5
3
1
2
211
enough resource for this event?
reject the event
collect enough user sequences
EventTrigger

157
precisely, for Approach 1, we first form a region to minimize the internal contention for the
incoming application (P1) and then rotate/translate the resulting region to fit the current
system configuration (P2). For Approach 2, in order to minimize the external contention, we
do the opposite, namely first select a near convex region based on the current configuration
(P3), and then map the application tasks onto the selected region (P4). The detailed
explanation and objective of each subproblem are explained in Section 7.4.
Note that if the number of vertices in an application is greater than the total number of
available resources, the system can, in principle, reject this application or start it at a different
level of granularity (which may result in lower performance). Since we focus on task
allocation, we use the first mechanism; changing the application granularity at run-time is left
for future work.
7.3.4. User Modeling
As shown in Figure 7.3 (i.e., steps from stage 2 to stage 3), the manager records many user
sequences for a specific user and then, at run-time, it builds the user model which is able to
predict the probability of a certain application as being critical. Considering the run-time
overhead, we propose two ratios for building this model.
• Instantaneous communication rate ratio ( ): the ratio between the communication
rate of application Q (bits per time unit) and that of all applications occurring from
time 0 to T.
(7.3)
• Cumulative communication energy ratio ( ): Ratio between the communication energy
consumption of application Q active in the system ( (t) = 1 if Q is active between times
α
α
r eij( )eij∀ E in AppQ∈
∑
r eij( )eij∀ E in AppQ∈
∑⎝ ⎠⎜ ⎟⎛ ⎞
AppQ ever occured∀∑
---------------------------------------------------------------------------------------------------=
β
Δ

158
t-1 and t, and 0 otherwise) and the communication energy of all events in the system from
time 0 to T.
(7.4)
Later on, we introduce an user model based on two threshold/parameters, and , for
the master PE predicting whether the incoming application is critical or not for a particular
user. As mentioned, if the incoming application is recognized as critical, then Approach 1 is
applied; otherwise, Approach 2 is used.
We observe that in most systems, however, the application sequence from different users
is not stationary (The user behavior variation has been discussed in Section 1.3.1). More
precisely, none or multiple applications may be identified as critical from sequences belonging
to a certain user and so parameters ( or/and ) should be able to fit different users. In
other words, under such non-stationary behaviors between different users (see Figure 1.5), it is
meaningful to learn on-line the structure of the user model if we can collect enough user
sequence information. We note that the light-weight learning process is not executed every
time when an application enters the system. Instead, it can be executed based on the user
(manual) settings, or when the global manger records enough user data. The user learning
process is described in Section 7.6, while the performance (including the overhead) is reported
in Section 7.7.3. In addition, the learning process can be done either on the global manager, or
on some slave processors which have access to the recorded user information. We note that in
this chapter, since the “light-weight” user model is built at run-time for each specific user, we
only include two parameters, and , which can be obtained with low computational
effort. For more accurate user models, we can include other factors which affect the user
behavior, such as location, time, environment (similar to context-aware computing [141]), or
even using more complex structure for building the models (e.g. neural network [126]).
β
Δ t( )t 1=
T
∑⎝ ⎠⎜ ⎟⎛ ⎞
EcommApp Q×
Ecomm_total T( )-------------------------------------------------=
αth βth
αth βth
αth βth
159
Moreover, predicting the user sequences at run-time may be a challenging task (e.g. finding
the correlations among applications using hidden markov model [126], predicting the modes
of applications for each user), which has the potential to maximize the resource management
process at run-time.
The following user-aware task allocation process (Section 7.4 and Section 7.5) and user
model learning process (Section 7.6) are limited to be applied on systems utilized by one
specific user for certain time or a long period of time, i.e. systems in categories 2 and 3 in
Table 1.1. For systems with multiple user interacting with at the same time, it is suggested to
explore the human pattern activity (for more discussion, see Section 8.2.2).
7.4. Problem Formulation of User-Aware Task Allocation Process
In this section, we first define some terms; the formulation of four sub-problems (see
Figure 7.4 P1 - P4) are presented later.
• MD(si = (xi , yi), sj = (xj , yj)): Manhattan Distance between locations si and sj where xi,
xj, yi, and yj are the x- and y- coordinates in the mesh system, i.e. MD(si, sj) = |xi - xj| +
|yi - yj|.
• ED(si = (xi , yi), sj = (xj , yj)): Euclidean Distance between locations si and sj, i.e.
ED(si, sj)) = (|xi - xj|2 + |yi - yj|2)1/2.
• R: a region containing several locations. This region can be contiguous or non-
contiguous.
• L(R): sum of pairwise Manhattan distances between all locations within R.
Similar to the two dispersal metrics presented by Mache [101], we use a metric for
measuring the external contention in the system during the run-time mapping process, namely

160
L(R)+L(R’-R), where R’ is the region with available resources in current system configuration
and R is the region with available resources which is going to be selected for the incoming
application. We proved that minimizing the metric, L(R)+L(R’-R), helps reducing the external
contention in Chapter 5.
Region Forming Sub-problem (P1)
Given the ACG of an incoming application and the current system configuration
Find a region R and a corresponding location G(vi) inside R, vi V in ACG which:
(7.5)
Such that: vi vj V, G(vi) G(vj) (7.6)
vi vj with M(vi) = M(vj), MD(G(vi) , G(vj)) dist (7.7)
where dist is observed from the current configuration.
If more than one region satisfies Equation 7.5, then select the region R for which L(R) is
minimized, i.e. we select the region as convex as possible since this helps reducing external
contention.
Region Rotation Sub-problem (P2)
Given an already formed region R (derived from P1) and the current configuration with
region R’ containing the available resources
Find a placement for the region R within R’ which:
min { L(R’-R) } (7.8)
Such that: vi V, CC(SPi = G(vi)) M(vi) (7.9)
∀ ∈
min Comm. cost comm eij( ) MD G vi( ) G vj( ),( )×e∀ ij E∈∑=
⎩ ⎭⎨ ⎬⎧ ⎫
∀ ≠ ∈ ≠
∀ ≠ ≈
∀ ∈ ≥

161
each link lk , (7.10)
Region Selection Sub-problem (P3)
Given the number of resources s required by the incoming application and the current
configuration with region R’ containing the available resources
Find a region R inside R’ with the number of locations in R equal to |V| which:
min { L(R) + L(R’ - R) } (7.11)
and min { nodes_affected(R) + links_affected(R) } (7.12)
Such that:
computation capacity level i, # of (CC(s) = i) in R = # of (M(vi V) = i) in ACG (7.13)
Application Mapping Sub-problem (P4)
Given a selected region R (derived from P3) and the ACG of the incoming application
Find H(vi) inside R, vi V in ACG which:
(7.14)
Such that: vi vj V, H(vi) H(vj) (7.15)
vi V, M(vi) = CC(G(vi)) (7.16)
each link lk , (7.17)
∀ comm. flows through lkall apps in the system∀
∑ B lk( )≤
∀ ∈
∀ ∈
min Comm. cost comm eij( ) MD H vi( ) H vj( ),( )×e∀ ij E∈∑=
⎩ ⎭⎨ ⎬⎧ ⎫
∀ ≠ ∈ ≠
∀ ∈
∀ comm. flows through lkall apps in the system∀
∑ B lk( )≤

162
7.5. User-Aware Task Allocation Approaches
Here, the algorithms used in Approaches 1 and 2 to solve the four sub-problems P1 ~ P4
are described in detail; why and how each approach is selected is later explained in
Section 7.6.
7.5.1. Solving the Region Forming Sub-problem (P1)
For this subproblem, we do not set any region boundary; therefore, there may exist more
than one solution minimizing the internal contention. As stated, we select the region R with
L(R) minimized. This is because, the more convex the region is, the better for minimizing the
external contention and communication overhead for additional applications.
In general, the region is convex if it contains all the line segments connecting any pair of
points inside it. Bender et al. [16] define the region to be optimal if the average distance
between any pair of points is a minimum; as such, the shape of an optimal region is expected
to be convex. However, the concept of near convex region we use here is more general; it
stands for a region whose area is closest to the area of its convex hull [35][37][89]. Our
objective in this sub-problem is to minimize the internal contention and communication cost
of the incoming application and, at the same time, make the resulting region as convex as
possible.
The region forming procedure is shown in Figure 7.5; it assumes that the input ACG is
represented using adjacency lists. Several additional data structures are maintained with each
vertex in the ACG. The color of each vertex u V is stored in the variable color[u], and the
communication weighted sum of u to other black/white neighbors are stored in the variable
Adj_b[u] and Adj_w[u], respectively. In addition, the center of the current resulting region R is
stored in the variable Center[R].
∈

163
An illustrative example is shown in Figure 7.6; here, we assume that each vertex vi in the
ACG has the same computational requirements. A BLACK vertex in Figure 7.6 stands for a
vertex which has been processed and got its specific location, while a WHITE vertex is a vertex
not processed yet. Initially, all vertices are WHITE and vertex v3 (for clarity, circle 3 stands for
Figure 7.5 Main steps of the region forming algorithm.
Input: (1) current system configuration
(2) ACG=(V,E)
Output: a region R(G), and its corresponding mapping G( ) for each vertex,i.e. R with the locations = (x1,y1) = G(v1), , ... ,
01: for each vertex u V02: do color[u] WHITE03: R04: choose u V such that Adj_w[u] is maximized05: color[u] BLACK06: G[u] = Center[R] (0,0)07: R R {G[u]} 08: if
09: do update Adj_b[u] for each vertex u10: choose u with color[u] = WHITE and Adj_b[u] is maximized11: color[u] BLACK12: choose available location gx,y such that , MD(gx,y , color[v] = = BLACK) dist where dist is observed from the current configuration and is minimized
and then ED(Center[R] , gx,y) is minimized13: G[u] gx,y
14: R R {gx,y}15: update Center[R]
gx1 y1, gx2 y2, gx V y V,
∈
←
Φ←
∈
←
←
← ∪
color u[ ]= =BLACKu∀ V∈∑ V<
u∀ V∈
←
v∀ V∈ ≈
comm euv( ) MD gx y, G v( ),( )×( )v∀ V∈
color v[ ]= =BLACK
∑
←
← ∪

164
vertex v3) is selected as having the largest communication to its neighbors (see Figure 7.6(a)).
Then vertex v3 is located at the center grid G0,0 (see the solid dot in Figure 7.6(b)).
Next, vertex v2 is selected since it has the largest communication rate with vertex v3
(compared to vertices v1, v6, and v7 (Figure 7.6(c)) and is located at G-1,0 (Figure 7.6(d)). Now
the center is updated to G-1/2,0, as shown with the solid dot in Figure 7.6(d). Then, vertex v1 is
selected since it has largest communication with BLACK vertices v2 and v3 (see Figure 7.6(e)).
Now, since grid positions G0,1, G1,0, and G0,-1 have the shortest MD and the same internal
contention, we calculate their ED to the center G-1/2,0. We select G0,1 or G0,-1 for vertex v1
since its ED to the center is smallest, as shown in Figure 7.6(f). Following this, vertices v5, v4,
v6, and v7 are successively selected for forming the region; the remaining process is shown in
Figure 7.6(g)-(n). The final solution is shown in Figure 7.6(n) with a thick line.
Complexity of the region forming algorithm: The overhead for initialization is O(V) (line
1-3), while it takes O(E) for line 4 and constant time for line 5-7. There are totally |V| - 1
iterations in the main loop (line 8-15). For each iteration, one vertex is reached by searching
edge with maximum communication rate (takes O(E) time) and then costs O(logV) to get the
location if implemented using HEAP to search the wavefront of the resulting region. The total
2
4
5
3
1
1
2
5
63
4
7
2
211 2
4
5
3
1
1
2
5
63
4
7
2
211 2
4
5
3
1
1
2
5
63
4
7
2
211
3 32 321
2
4
5
3
1
1
2
5
63
4
7
2
211
5321
2
4
5
3
1
1
2
5
63
4
7
2
211
53214
2
4
5
3
1
1
2
5
63
4
7
2
211
53214
6
2
4
5
3
1
1
2
5
63
4
7
2
211
53214
67
y
x
y
x
y
x
y
x
y
x
y
x
y
x
(b) (d) (f) (h) (j) (l) (n)Figure 7.6 Example showing the region forming algorithm on an ACG.
ACG
(a) (c) (e) (g) (i) (k) (l)
165
time complexity is O(VElogV). However, the edge searching, if implemented with another
HEAP, it would only take O(ElogE) for these |V| - 1 iterations. Therefore, the time complexity
of this algorithm can be reduced to O(VlogV + ElogE).
7.5.2. Solving the Region Rotation Sub-problem (P2)
By solving the sub-problem P1, we get a region with each vertex vi and its corresponding
location G(vi). Now, we need to search a placement for this region on the current configuration
with the objective of fitting the region within the configuration as best as possible. First, we
define some terms and a metric for measuring it.
• Rrec: a minimal enclosing rectangle containing the region R. Assume the size of the
rectangle is m × n.
• Rotation(Rrec): all rotations of Rrec, i.e. rotate by 90, 180, 270 degree, and reverse (up
and down, left and right).
• grid_status(Rrec): an m × n matrix with the value of the entry set to its minimal
computation requirement if one vertex is allocated on it, otherwise set to 0.
• Rs: an m × n sub-mesh in the system configuration.
• system_status(Rs): an m × n matrix with the value of the entry set to its computational
capacity if the resource inside is not used, otherwise set to 0.
• subtract(grid_status(Rrec) , system_status(Rs)): subtracting grid_status(Rrec) from
system_status(Rs). If one of the entries of the resulting matrix is negative, then
subtract(Rrec , Rs) is set to 0; otherwise, subtract(Rrec , Rs) is defined as the sum of the
entries in the resulting matrix. Since subtract(Rrec , Rs) is defined as the matching

166
difference, a lower positive value stands for a better match. Of note, if
subtract(Rrec , Rs) = 0, we cannot place Rrec onto the sub-mesh Rs.
One simple example is illustrated in Figure 7.7. Assume that the region, R, shown in
Figure 7.7(a) contains all vertices inside it. The minimal rectangle containing R, Rrec, is shown
in Figure 7.7(b). Assume that two different sub-meshes, Rs1 and Rs2, have the same size of
Rrec extracted from the current configuration; the empty space in Figure 7.7(c) and (d)
represents the locations of un-used (i.e., available) resources. After subtracting
grid_status(Rrec) from system_status(Rs), the subtract(Rrec , Rs1) is 3 which implies that these
two rectangles fit pretty well. On the contrary, subtract(Rrec , Rs2) is set to 0 since one of the
entries of the resulting matrix is negative, which implies that these two rectangles do not
match.
The steps of region rotation algorithm are shown in Figure 7.8.
Figure 7.7 The subtraction calculation during the region rotation process.
1 2 1 00 1 1 20 0 1 0
RRrec
grid_status(Rrec)
=
Rs1 Rs2
1 2 1 10 1 1 20 0 1 2
1 2 1 11 1 1 20 0 0 2
system_status(Rs1)
=
system_status(Rs2)
=
0 0 0 1 0 0 0 00 0 0 2
=0 0 0 1 1 0 0 00 0 -1 2
=
subtract(Rrec,Rs1) = 3 subtract(Rrec,Rs2) = 0
Rs1 -Rrec Rs2 -Rrec
53214
67
53214
67
(a) (b) (c) (d)
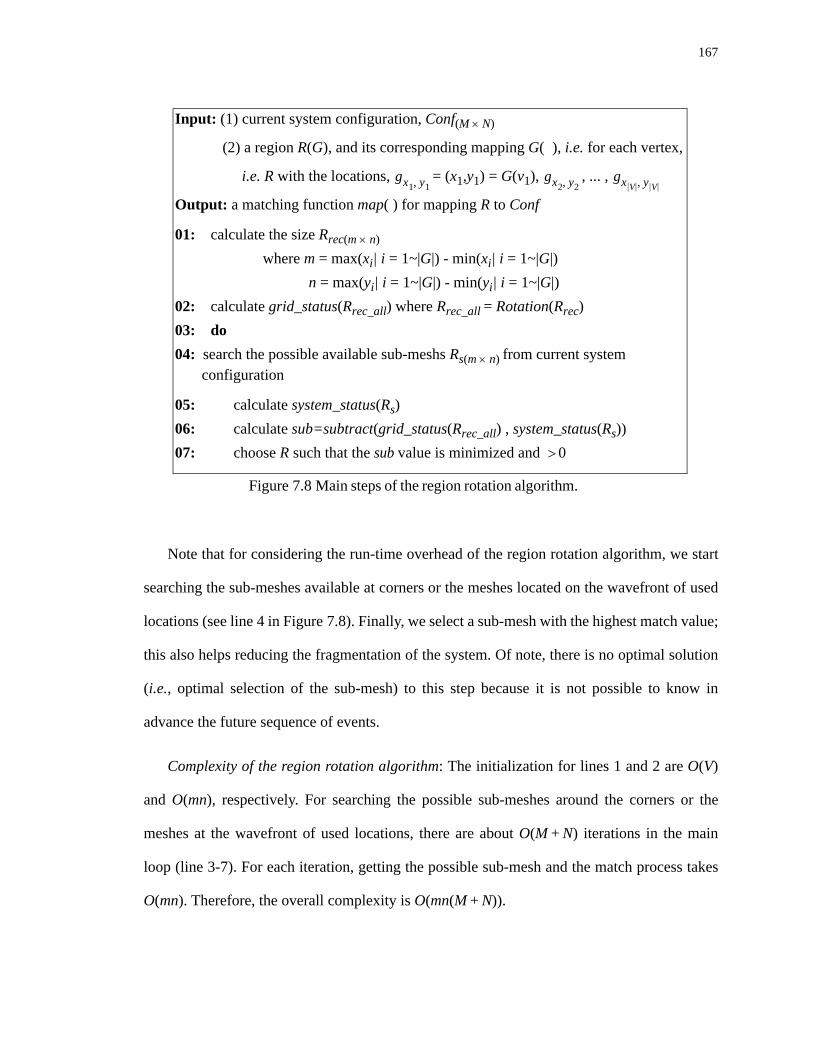
167
Note that for considering the run-time overhead of the region rotation algorithm, we start
searching the sub-meshes available at corners or the meshes located on the wavefront of used
locations (see line 4 in Figure 7.8). Finally, we select a sub-mesh with the highest match value;
this also helps reducing the fragmentation of the system. Of note, there is no optimal solution
(i.e., optimal selection of the sub-mesh) to this step because it is not possible to know in
advance the future sequence of events.
Complexity of the region rotation algorithm: The initialization for lines 1 and 2 are O(V)
and O(mn), respectively. For searching the possible sub-meshes around the corners or the
meshes at the wavefront of used locations, there are about O(M + N) iterations in the main
loop (line 3-7). For each iteration, getting the possible sub-mesh and the match process takes
O(mn). Therefore, the overall complexity is O(mn(M + N)).
Figure 7.8 Main steps of the region rotation algorithm.
Input: (1) current system configuration, Conf(M × N)
(2) a region R(G), and its corresponding mapping G( ), i.e. for each vertex,
i.e. R with the locations, = (x1,y1) = G(v1), , ... ,
Output: a matching function map( ) for mapping R to Conf
01: calculate the size Rrec(m × n)
where m = max(xi| i = 1~|G|) - min(xi| i = 1~|G|) n = max(yi| i = 1~|G|) - min(yi| i = 1~|G|)02: calculate grid_status(Rrec_all) where Rrec_all = Rotation(Rrec)03: do04: search the possible available sub-meshs Rs(m × n) from current system configuration
05: calculate system_status(Rs)06: calculate sub=subtract(grid_status(Rrec_all) , system_status(Rs))07: choose R such that the sub value is minimized and 0
gx1 y1, gx2 y2, gx V y V,
>

168
7.5.3. Solving the Region Selection Sub-problem (P3)
The purpose of this sub-problem is to minimize the external contention, while selecting a
region R from the current configuration containing all available resources in R’. As discussed
in [35][37], we check that, indeed, selecting a near convex region helps minimizing i) the
external contention, ii) the communication cost for the incoming applications, i.e., L(R), and
iii) the communication overhead for additional applications, i.e., L(R-R’). Therefore, selecting
resources to form a near convex region becomes our goal for this sub-problem. More details
on the algorithm steps and examples was explained in Section 5.5.1.
Note that, there is no optimal solution for this region selection sub-problem since the
sequence of future events is not known a priori. We later evaluate the overall methodology for
long event sessions and show the potential of the region selection algorithm (see Section 7.7).
7.5.4. Solving the Application Mapping Sub-problem (P4)
The inputs of the application mapping sub-problem are i) the ACG of the incoming
application and ii) the resulting region (derived from P3). Our goal here is to map the
application tasks in ACG to the resource locations in R, i.e. vertex allocation process, such that
the communication energy consumption can be minimized. More details on the algorithm
steps and examples are available in Section 5.5.2.
7.6. Light-Weight Model Learning Process
As we already mentioned, as the global manager collects enough data on sequences from
one user, it starts building a light-weight user model that can be used to decide between
approaches 1 or 2 (see stage 3 in Figure 7.3), instead of simply using the pre-defined user
model (stage 2 in Figure 7.3). We apply a machine learning technique, more precisely decision
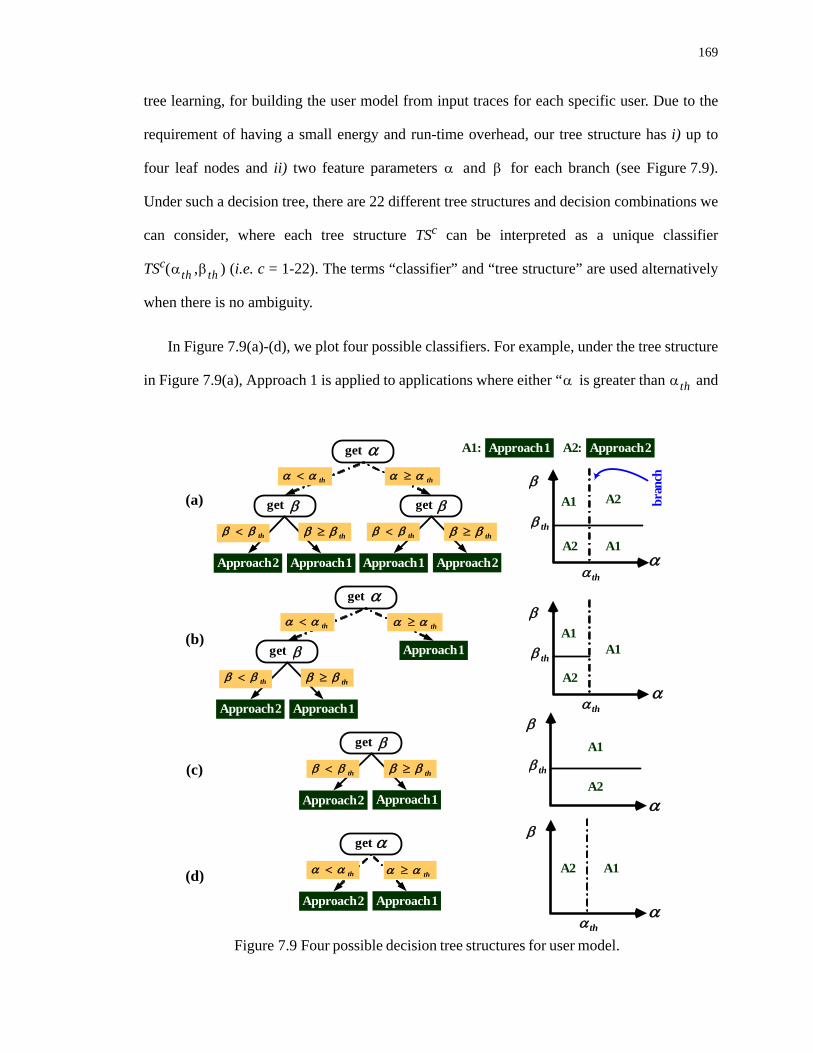
169
tree learning, for building the user model from input traces for each specific user. Due to the
requirement of having a small energy and run-time overhead, our tree structure has i) up to
four leaf nodes and ii) two feature parameters and for each branch (see Figure 7.9).
Under such a decision tree, there are 22 different tree structures and decision combinations we
can consider, where each tree structure TSc can be interpreted as a unique classifier
TSc( , ) (i.e. c = 1-22). The terms “classifier” and “tree structure” are used alternatively
when there is no ambiguity.
In Figure 7.9(a)-(d), we plot four possible classifiers. For example, under the tree structure
in Figure 7.9(a), Approach 1 is applied to applications where either “ is greater than and
α β
αth βth
get α
get β
αget
thαα ≥α thαα <
α thββ ≥α thββ <α thββ ≥α thββ <
Approach 2Approach 1Approach 1Approach 2
Get get β
α thββ ≥α thββ <
Approach 1Approach 2
get
αα
Approach 1Approach 2
α
thαα ≥thαα <
get α
get β
αα thαα <
α thββ ≥α thββ <
Approach 1
Approach 1Approach 2
β
thαα ≥
α
β
thα
thβ
Approach 2A2:Approach 1A1:
A2
A1
A1
A2
α
β
thα
thβ A1A1
A2
α
β
thβA1
A2
α
β
thα
A1A2
bran
ch
Figure 7.9 Four possible decision tree structures for user model.
(a)
(b)
(c)
(d)
α αth

170
is smaller than ”, or “ is smaller than and is greater than ”. If we use the
structure in Figure 7.9(d), then the critical application decision is made only depending on
values.
While the sequences of events vary a lot for different users (see Figure 1.5, where the
number and type of applications running on the system are quite different), the specific tree
structures should be learned to fit a certain user. We denote the collected/given sessions3 for
any user ui as the training dataset ( ), while the future (or unseen) sessions as the testing
dataset ( ). The goal of the model learning process is to a find a tree structure ST and the
related threshold value, and/or , such that the communication energy consumption for
future user sequences in is minimized. Since the dataset is not given in advance, we
can only target the sessions in ; that is,
Given sessions in ,
Find a tree structure TSc and corresponding parameters which minimize:
(7.18)
where is the length of session si
c = 1- 22, and = 0.1, 0.2,...0.9
It has been observed that, the performance of the training set is not a good indicator of
predictive performance of the unseen data due to the problem of over-fitting [56]. More
precisely, Efron in [56] proposes a cross-validation method for minimizing the future
prediction error. Here, we first explain the k-fold cross-validation method [92] and then
3. A session is a sequence of events when users log in and log off the system. As shown in Figure 1.5,every duration from the positive clock edge to the negative clock edge is referred to as an event.
β βth α αth β βth
αth
Dtrui
Dteui
αth βth
Dteui Dte
ui
Dtrui
Dtrui
αthc βth
c,( )
min Ecomm_total TsiTSc αth
c βthc,( ),⎝ ⎠
⎛ ⎞
si in Dtr
ui∀
∑⎩ ⎭⎪ ⎪⎨ ⎬⎪ ⎪⎧ ⎫
Tsi
αth βth

171
provide the pseudo code of our tree-based learning process with and without cross-
validation.
In the k-fold cross-validation, the training dataset Dtr is randomly partitioned into k
mutually exclusive subsets (called folds) D1, D2,..., Dk of approximately equal sizes. Each
classifier TS( , ) is trained and tested k times; each time t {1, 2, ..., k}, the classifier is
trained on D-Dt and tested on the validation set Dt. The performance of this classifier is
measured by the average testing results on the validation set Dt, t=1~k. The cross-validation
example with k = 4 is shown in Figure 7.10 where the validation sets are indicated by the gray
blocks. For each classifier TS, we train with (D2,D3,D4), (D1,D3,D4),(D1,D2,D4),(D1,D2,D3)
and test on D1,D2,D3, and D4, respectively. The goal is to find a classifier such that the
average testing results on the validation sets are the best.
Figure 7.11 (a) and (b)(c) illustrate the pseudo code of the structure learning process
without and with cross-validation, respectively. The sub-function find_para takes as inputs D
and TSc, and it returns the parameters for classifier c and its corresponding
performance results, Emin. The k-fold cross-validation method works as we train on D-Dt (see
line 3 in Figure 7.11(b))and test on the validation set Dt (see line 4 in Figure 7.11(b)) for t = 1 -
k.
Of note, the complexity of the k-fold cross-validation approach depends on several
parameters, such as the value k, the model selection with related factors and the amount of
αth βth ∈
Figure 7.10 4-fold cross-validation for model learning.
D1 D2 D3 D4
D1 D2 D3 D4
D1 D2 D3 D4
D1 D2 D3 D4
t = 1
t = 2
t = 3
t = 4
training set
validation set
Dtr
αthc βth
c,( )

172
Figure 7.11 (a) Pseudo codes of tree structure learning process withoutcross-validation method and (b)(c) with cross-validation method.
01: 02: for = 0.1 : 0.1 : 0.903: for = 0.1 : 0.1 : 0.904:
05: if
06: do
07:
08: return
find_para Dateset D classifier TSc,( )
Emin ∞←
αthβth
Etmp Ecomm_total TsiTSc αth βth,( ),⎝ ⎠
⎛ ⎞ si in D∀∑←
Etmp Emin<
Emin Etmp←
αthc βth
c,( ) αth βth,( )←
αthc βth
c Emin, ,
01: for c=1 : 1 : num_classifier 02:
03: select one classifier c’, s.t. minimize 04: output: learned model
TSDtr
c αthc βth
c,( ) Ec,⎝ ⎠⎛ ⎞ find_para Dtr TSc,( )=
Eallc′
TSc′ αthc′ βth
c′,( )
(a) structure learning without cross validation
01: for c=1 : 1 : num_classifier 02: for t = 1 : 1 : k03: 04:
05: select one classifier , minimize
06:
07: output: learned model
TSDtr Dt–c αth
c βthc,( ) Ec,⎝ ⎠
⎛ ⎞ find_para Dtr Dt– TSc,( )=
Eallc 1
k--- Ecomm_total Tsi
TSDtr Dt–c αth
c βthc,( ),⎝ ⎠
⎛ ⎞
si in Dt∀∑
t 1=
k
∑=
c″ Eallc″
TSDtr
c″ αthc″ βth
c″,( ) Ec,⎝ ⎠⎛ ⎞ find_para Dtr TSc″,( )=
TSc″ αthc″ βth
c″,( )
(b) structure learning with k-fold cross-validation
(c) subfuntion find_para( )

173
training data we have (i.e. the number of sequences of events we collect). For k, 10 is a widely
suggested value [56]. In terms of the amount of training data, intuitively, the more, the better.
If the user learning process does not have any memory or runtime limitation, then we can use
all collected data or even apply bootstrap method [56] which can increase the model accuracy.
In practice, however, we need to carefully select all the parameter settings. We report the
overhead in Section 7.7.3 for our system environment.
7.7. Experimental Results
In Section 7.7.1, we evaluate the hybrid approach consisting of Approaches 1 and 2 under
the pre-defined user model (stage 2 in Figure 7.3). We first evaluate two sub-problems, P1 and
P4, which have an optimal solution; later, the methodology combining P1-P4 at stage 2 is
evaluated. In Section 7.7.2, the energy overhead of running our run-time algorithms is
evaluated for real applications. Finally, the performance of the on-line user model learning
process in stage 3 is reported in Section 7.7.3.
7.7.1. Evaluation on Random Applications
We first evaluate the solution quality of region forming and application mapping
algorithms against the optimal solution. The experiments are performed on an AMD
Athlon™ 64 Processor 3000+ running at 2.04GHz; the results are shown in Figure 7.12.
Twenty categories of random applications are generated with TGFF [162]; these are
combinations of ‘ACG density with 30%, 50%, 70%, 90%’ and ‘variance of communication
rate per edge in one application of 10, 102, 103, 104, and 105’. Each category contains 50
applications with the number of vertices in a ACG ranging from 8 to 12 and assume each
vertex has the same computation requirement. The ACG density of an application is defined as

174
the number of edges in the application divided by the total number of edges in the complete
graph (in which each pair of vertices is connected by an edge). For instance, the ACG density
of an application in Figure 7.6 with 7 vertices and 9 edges is 9/21×100% = 42.8%.
Figure 7.12(a) gives the communication energy consumption under the region forming
algorithm (P1) by comparing it against the optimal solution (i.e., internal communication cost
minimized without any boundary constraint). Figure 7.12(b) compares the communication
energy consumption of the application mapping algorithm (P4) against the optimal solution
for a given region obtained from the region selection algorithm (P3) and the size of the region
is the same as the vertex number in that ACG. Simulation takes around 3 minutes to get the
optimal solution for each application; this is clearly inadequate for a run-time solution. In
contrast, our algorithms for P1 and P4 takes less than 1 microsecond. As shown in
Figure 7.12(a)-(b), the loss in communication energy consumption is less than 12% compared
to optimal solution for all categories, and about 4.5% and 6.2% communication energy loss,
on average, in Figure 7.12(a) and (b), respectively.
ACG density (%)
10 510 4 10 3 10 2 10 1
Variance of comm.
rate per edge
Com
m. e
nerg
y lo
ss p
erce
ntag
e
Figure 7.12 Communication energy loss compared to the optimal solution for (a) regionforming (P1) sub-problem and (b) application mapping (P4) sub-problem on a 2D-mesh NoC.
(a) (b)
Com
m. e
nerg
y lo
ss p
erce
ntag
e
10 510 4 10 3 10 2 10 1
Variance of comm.
rate per edgeACG density (%)

175
Next, we evaluate the stage 2 of the entire methodology as shown in Figure 7.3. Assume
that 10 different applications can be invoked by an user and their ACGs have been generated
with the number of vertices in each application ranges from 3 to 10 and the execution time of
applications ranges from 5 to 30 seconds. Next, we use probabilities to capture the user
behavior. More precisely, we randomly generate the first 100 events; after that, events come
out according to the occurrence probability of all previous events. Events displayed in
Figure 7.13 start from the 101st event sequence. The events are executed on a platform with
8 × 8 processors, one of them being the master PE. The pre-defined user model we use is the
same as the structure in Figure 7.9(b) with and set to 0.8 and 0.7, respectively;
these threshold values fit the best all the data collected from various user sequences). The
communication cost at time t is computed with the total communication energy consumed by
all applications running in the system, over a period from time t-1 to time t.
In Figure 7.13(a), we denote the communication cost of the hybrid approach by “cost_3”,
while the communication cost with Approaches 1 and 2 is denoted by “cost_1” and “cost_2”,
respectively. For the hybrid approach, the process starts taking the user behavior into
consideration after time 20, while the iteration, iter (see Figure 7.4), is set to 3. Note that, the
information of an application leaving the system is not displayed in the figure.
As shown in Figure 7.13(a), with user behavior considered, the energy overhead at
start is less than that when a deterministic approach is applied. As shown, Approach 1
performs well initially since the system utilization is low. As the system utilization
increases, Approach 1 performs poorly since there are many non-contiguous regions in
the system. One can also see that the communication cost ratio does not fluctuate
significantly after the system runs for a certain period of time. We estimate that the
hybrid approach achieves about 40% and 25% communication energy savings, compared
αth βth

176
to approaches 1 and 2, respectively. We also compare the L(R) metric, where R is the
available/unused resources in the system at each time unit among different approaches. We
denote the L(R) of the hybrid approach by “L_3”, while the L(R) with Approaches 1 and 2 are
denoted by “L_1” and “L_2”. In Figure 7.13(b), we plot the ratio of L_3/L_1, L_3/L_2, and
the number of applications in the system at each time unit. As shown in Figure 7.13(b), the
L(R) of the hybrid approach is less than 10% greater than that of Approach 2, which implies
:
:
:
: L_3 / L_1: L_3 / L_2: # of applications in the system
1110987654321
1110987654321
0 50 100 150
1110987654321
Figure 7.13 (a) Communication cost comparison among Approach 1, Approach 2, and thehybrid approach (which considers the user behavior) on an 8 × 8 NoC. (b) L(R) where R isthe available/unused resources comparison among Approach 1, Approach 2, and thee hybridapproach.
0 50 100 150
0.4
0.6
0.8
1
1.2
1.4
:::
cost_3 / cost_2cost_3 / cost_1
event trigger
time (sec)
com
mun
icat
ion
ratio
time (sec)
L(R
) rat
io
# of
app
licat
ions
(a)
(b)
L_1/L_3L_2/L_3

177
that the external contention in hybrid approach is not so serious. In addition, when the system
utilization is higher (i.e. more applications are present in the system), it can be observed that
L(R) in Approach 1 is much higher than that in hybrid approach; this is because, when the
application leaves the system, there is always a scattered region left in the system
configuration.
To show the scalability of our proposed methodology, we report the communication
consumption comparison among these three approaches on different size NoCs, i.e. 6 × 6,
8 × 8, 10 × 10, and 12 × 12 as shown in Table 7.2. The communication cost of running
applications on each NoC for a certain approach is obtained when the ratio does not fluctuate
significantly, i.e. after the system runs for a certain period of time (similar to the case in
Figure 7.13(a)). As observed, the ratio decreases as the size of the platform increases,
which shows that our hybrid approach looks promising particularly for large NoC
platforms.
7.7.2. Real Applications with Run-time Energy Overhead Considered
In this section, we apply our proposed methodology to real applications, i.e. the embedded
system benchmark suite (E3S) [50]: Automotive/Industrial, Consumer, Networking, Office
automation, and Telecom. Our homogeneous 5 × 5 mesh-based NoC contains 24 slave
processors (some are AMD ElanSC520 operating at 133 MHz, some are AMD K6-2E
Table 7.2 Comparison of communication consumption among different approaches on a different size NoCs.
communication ratio 6 × 6 8 × 8 10 × 10 12 × 12cost_3/cost_1 0.74 0.60 0.48 0.32cost_3/cost_2 0.81 0.75 0.71 0.63

178
operating at 500 MHz) and one master PE, MicroBlaze core (100MHz) acting as the global
manager.
A C++ simulator using the bit energy metric model in [170] evaluates the
communication energy consumption where is set to 4.49 × 10-13 (Joule/bit) and
contains the energy consumes on the routing engine (10-13 Joules/packet), arbiter request
(1.155 × 10-12 Joules/packet), switch fabric (2.84 × 10-13 Joules/bit), and buffer reading and
writing (1.056 × 10-12 and 2.831 × 10-12 Joules/bit, respectively).
Five benchmarks of E3S have been partitioned off-line [30][127]. As such, the number of
vertices in the ACG of each benchmark ranges from 3 to 8 and vertices have two different of
computation capacity level where critical vertices must be operate at AMD K6-2E for meeting
the application deadline. The user sequences come from realistic data collected from five
different applications running under Windows XP. The execution time of an event is
normalized to the reasonable range from 10 μs to 10 ms for E3S benchmarks. We run 200
events (from the 101st to the 300th event) for each scenario: “Nearest Neighbor [27]”,
“Approach 1”, “Approach 2”, and “Hybrid approach”. For “Approach 1” and “Approach 2”
scenarios, we only apply approach 1 and approach 2, respectively, to all events (see
Figure 7.4). For the “Hybrid approach” scenario, approaches 1 and 2 are selected at run-time
(the iteration, iter (see Figure 7.4) is set to 3) based on the pre-defined user model in
Figure 7.9(b), with and set to 0.8 and 0.7, respectively. Of note, “Approach 2” and
“Hybrid approach” correspond to stages 1 and 2 in Figure 7.3, respectively.
In the following evaluation, we consider the run-time and energy overhead of processing
our proposed algorithms: i) running the approach selection process (i.e., , compared to
, ) on the manager, ii) running the resource assignment process (i.e., P1-P2 for
Approach 1 and P3-P4 for Approach 2) and iii) sending the control messages over the control
network back to the manager. Of note, the communication volume for all control messages in
Elink ERbit
αth βth
α β
αth βth

179
one event is Z = [a bits (for showing the location of the slave processor, which depends on
network size) + 1 bit (resource status)] × MD (distance of all slave processors to the master
PE). Of note, compared to the data messages transmitted for real applications (which is in the
order of Megabits), the overhead of sending control messages is clearly negligible.
To compare the communication energy consumption for each scenario, we denote some
variables as follows:
• : the communication energy consumption of an event Q, or an application Q, in
scenario x.
• :the energy overhead of running the approach selection and resource
assignment processes on the master PE for the event Q in scenario x.
• :the run-time overhead of running the approach selection and resource
assignment processes on the master PE for the event Q in scenario x (obtained from
MicroBlaze processor running on Xilinx Vertex-II Pro XC2VP30 FPGA).
We set the scenario “Nearest Neighbor [27]” as the baseline algorithm and we assume
zero energy and run-time overhead for the baseline algorithm. Then the total communication
energy consumption for these 200 events in scenario x is:
[ ]
The experimental results are shown in Table 7.3. We determine experimentally that for
the “Hybrid approach”, about 60% communication energy savings can be achieved compared
to “Nearest Neighbor” scenario.
EApp Qx
EApp Qx_select
TApp Qx_select
Q 101=
300
∑ EApp Qx
Ex_select
App Q+

180
When comparing with “Approach 1” and “Approach 2” schemes, the “Hybrid approach”
provides around 38% and 24% communication energy savings, respectively. The average run-
time overhead of the approach selection and resource assignment processes in “Approach
1”, “Approach 2”, and “Hybrid approach” scenarios for one event is 47.2μsec, 49.4μsec, and
53.4μsec, respectively. As the hard deadline of E3S benchmarks are in msec order, our
algorithms are appropriate to be done at run-time.
7.7.3. Real Applications with On-line Learning of User Model
Here, we evaluate the performance with the on-line user model. In this implementation,
we include a Multimedia System (MMS) [80], a Video Object Plane Decoder [104], and
the five E3S benchmarks [50]; the number of vertices in the ACG of each benchmark
ranges from 5 to 25. Four scenarios (Nearest Neighbor [27], stages 1, 2, and 3 in Figure 7.3)
are considered for the system configuration of a 10 × 10 mesh network. For stage 3, 10-fold
cross-validation method is used for learning the user model [56]. As discussed in Section 2.3.1
for capturing the essence of human behavior while users interact with computing systems, the
user sequences come from collecting the behaviors of four users running seven
applications (i.e. Media player, Windows explorer, Windows powerpoint, Matlab, Adobe
acrobat, Microsoft word, and Outlook express) in a Windows XP environment; the
execution time is normalized, ranging from 10 μs to 100ms.
Table 7.3 Comparison of the run-time overhead and the overall communication energy savings under four implementations on a 5 × 5 mesh NoC.
Approach Tx_selection, orAvg. run-time overhead
per event (μsec)Normalized
total event costNearest Neighbor [27] 0 1
Approach 1 47.2 0.682Approach 2 (stage 1) 49.4 0.551
Hybrid approach (stage 2) 53.4 0.405
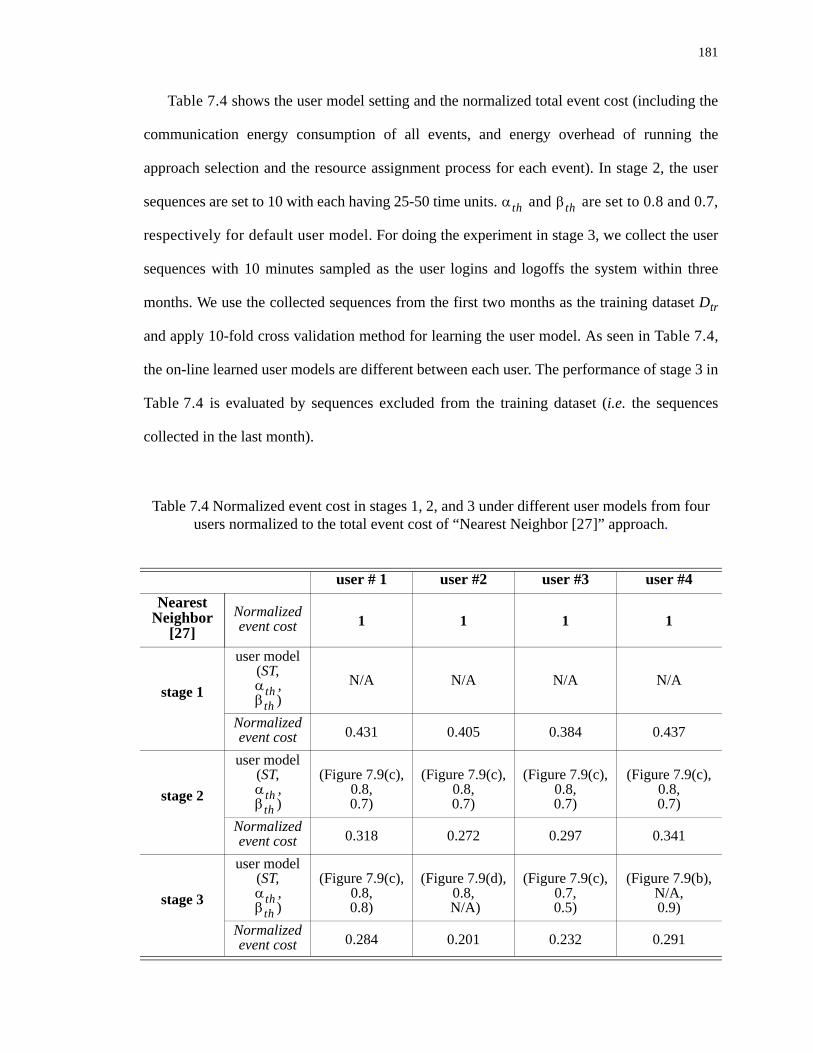
181
Table 7.4 shows the user model setting and the normalized total event cost (including the
communication energy consumption of all events, and energy overhead of running the
approach selection and the resource assignment process for each event). In stage 2, the user
sequences are set to 10 with each having 25-50 time units. and are set to 0.8 and 0.7,
respectively for default user model. For doing the experiment in stage 3, we collect the user
sequences with 10 minutes sampled as the user logins and logoffs the system within three
months. We use the collected sequences from the first two months as the training dataset Dtr
and apply 10-fold cross validation method for learning the user model. As seen in Table 7.4,
the on-line learned user models are different between each user. The performance of stage 3 in
Table 7.4 is evaluated by sequences excluded from the training dataset (i.e. the sequences
collected in the last month).
Table 7.4 Normalized event cost in stages 1, 2, and 3 under different user models from four users normalized to the total event cost of “Nearest Neighbor [27]” approach.
user # 1 user #2 user #3 user #4Nearest
Neighbor [27]
Normalizedevent cost 1 1 1 1
stage 1
user model(ST,
,)
N/A N/A N/A N/A
Normalizedevent cost 0.431 0.405 0.384 0.437
stage 2
user model(ST,
,)
(Figure 7.9(c), 0.8, 0.7)
(Figure 7.9(c), 0.8, 0.7)
(Figure 7.9(c), 0.8, 0.7)
(Figure 7.9(c), 0.8, 0.7)
Normalizedevent cost 0.318 0.272 0.297 0.341
stage 3
user model(ST,
,)
(Figure 7.9(c),0.8,0.8)
(Figure 7.9(d),0.8,
N/A)
(Figure 7.9(c),0.7,0.5)
(Figure 7.9(b), N/A,0.9)
Normalizedevent cost 0.284 0.201 0.232 0.291
αth βth
αthβth
αthβth
αthβth

182
As observed in Table 7.4, with the pre-defined user model considered (stage 2), we
achieve 70%, on average, communication energy savings compared to the “Nearest
Neighbor” schemes. With learned user model (stage 3), we can achieve 18% and 75%, on
average, communication energy savings compared the pre-defined user model scheme
and the “Nearest Neighbor” schemes, respectively4. While experimenting on the user
model learning procedure for the training dataset Dtr without 10-fold cross-validation
method, we observe that the energy consumes 15% more on the testing dataset, on
average, for each user compared to user model learning with cross-validation method
applied.
Of note, the overhead of the model learning step is not included in Table 7.4 since the
learning step is not executed for each event. Basically, we collect hundreds of sequences from
one user for a period of time and update the user model once for that user if necessary. The
overhead of learning the user model is affected by multiple factors, i.e. the user model
complexity (including the parameters and the structure for building the model), the amount of
collected sequences (how often for updating the model), and the computation capability of the
global manager.
Here, we report that the run-time overhead of the learned user model process (steps in
Figure 7.11 (b)) running on 100MHz MicroBlaze processor with the collected user sequences
(sessions with 10 minutes sampled as the user login and logoff the system for three months)
without and with the cross-validation process are 1.3 second and 9.6 seconds. The user model is
learned from 22 different decision trees (or classifiers) combined with different and
values ranging from 0.1, 0.2,...,to 0.9, while using the 10-fold cross-validation. We
conclude that having the cross-validation process for the learning process indeed helps
4. For example, in the MIT RAW on-chip network where the communication energy consumption rep-resents 36% of the total energy consumption [20], applying our approach in stage 3 of Figure 7.3can save 27% of total energy consumption compared to the “Nearest Neighbor” scheme.
αth βth

183
build more accurate user model, but we need to evaluate its run-time overhead. Therefore,
in reality, there is no restricted rule of when, where, and even how to update the user model. It
is suggested to do some analysis to see whether or not the current user behavior is suitable for
the latest updated user model. In addition, we could update the model slightly (e.g. modifying
the thresholds only) instead of learning the model using whole collected sequences. Moreover,
for future embedded systems, the user model learning process is not necessary to be built on
the system itself. We could upload the collected sequences periodically to the data center and
with its strong computation capacity, we are able to build more accurate model before
downloading relevant parameters back to the system.
The proposed tree-based structure for building user model on-line for each specific user is
the first step for run-time optimization while taking the user behavior into consideration. More
work needs to be done by increasing the adaptability of the system while considering the
feedback between system and users. In addition, if one user with his/her behavior has hugh
difference for certain reasons (as shown in Figure 1.1, the dot changes from one cluster to
other clusters), it is suggested to either include heavier run-time optimization such that the
system can better adapt to this user, or suggest the user to own new platform which can fit
him/her well with light-wight optimization.
7.8. Summary
In this chapter, we have proposed a run-time strategy for allocating the application tasks to
embedded MPSoC platform where communication happens via the NoC approach. As novel
contribution, we have incorporated the user behavior information in the resource allocation
process; this allows system to better respond to real-time changes and adapt dynamically to
different user needs. Several algorithms have been proposed for solving the task allocation
problem, while minimizing the communication energy consumption and network contention.

184
By applying machine learning techniques, more precisely tree-based model learning, for building
the user model from input traces, we can achieve around 75.8% communication energy savings
compared to an arbitrarily contiguous allocation scenario on the NoC platform. As suggested,
although we focus on the 2-D mesh NoC platform, our algorithm can be adapted to other
regular architecture with different networks topologies.
It can be seen that the methodology proposed in this chapter can be applied to embedded
system in the second and third categories as discussed in Table 1.1. For the systems in the first
category, we are also interested in researching the patterns of human dynamics which allow us
to follow specific human actions in ultimate detail, such as adding the social behavior
component (flow experience). This remains to be done in future work (see Table 8.2.2).

185
8. CONCLUSIONS AND FUTURE DIRECTIONS
With industry shifting to platform-based embedded system design, much progress in the
traditional DSE techniques has been moving from task-level, resource-level, to even system-
level perspective, while targeting system optimization with the goal of improving the system
performance. Over recent years, embedded systems have gained an enormous amount of
processing power and functionality; future systems will likely consist of tens or hundreds of
heterogeneous cores supporting multiple applications. However, from users’ perspective,
users purchase “fit enough” products which typically provide “just-enough performance”
during operation, and rather focus on additional concerns, such as the appearance,
practicability of the product, or even price. In addition, due to the high variability seen in user
preferences, it becomes much more challenging for system designers to meet the various users
taste.
8.1. Dissertation Contributions
In this dissertation, we propose a unified user-centric embedded design framework for
both off-line DSE and on-line optimization, while explicitly involving the user experience into
the process. In other words, we target incorporating the user behavior information into the
system design, optimization, and evaluation steps. The main contributions of this dissertation
can be summarized as follows:
• For MPSoCs with predictable system configurations, the platform can be generated
following the traditional Y-chart design flow, given the universal use-cases application
parameters, and architecture templates. In Chapter 3, we explored the system

186
interconnect for large MPSoC design using the NoC communication approach, which
aims at trading off the system performance and several physical design metrics. The
results demonstrated that the optimization framework is capable of obtaining Pareto
solutions with multiple buses instead of the current single bus that significantly reduces
communication latency with negligible fabric wirelength and area penalty.
• Satisfying the end user is the ultimate goal of any system optimization. Toward this end,
in Chapter 4, we presented a new design methodology for automatic regular platform
generation of embedded NoCs resulting in unpredictable system configurations, while
including explicitly the information about the user experience into the design process;
this aims at minimizing the workload variance and allows the system to better adapt to
different types of uses. More precisely, we relied on machine learning techniques to
cluster the traces from various users into several classes, such that the differences in
user behavior for each class are minimized. Then, for each cluster, we proposed an
architecture automation deciding the number, the type, and the location of resources
available in the platform, while satisfying various design constraints.
• Exploring on-line resource allocation techniques while mapping multiple applications
onto multiple computing resources is a fundamentally important issue in MPSoC
design. This also belongs to the large class of resource allocation problems in parallel
systems. In Chapter 5, efficient techniques for run-time application mapping onto
NoC platforms with multiple voltage levels have been presented with the goal of
minimizing the total communication energy consumption and maximizing the
system performance, while still providing the required performance guarantees. In
parallel, the proposed techniques allow for new applications to be easily added to
the system platform with minimal inter-processor communication overhead.

187
• The collective resource utilization and system reliability are important for achieving
overall computing capacity in MPSoCs. Especially, for larger MPSoCs integrated with
hundreds or thousands cores where the communication happens via the NoC approach,
any failures through the computation or communication components may degrade the
system performance, or even render the whole system useless. In Chapter 6, we
discussed the workload variation resulting from the system itself and later investigated
the spare core placement problem taking into account the with fault-tolerant property.
As the main theoretical contribution, we addressed the resource management problem on
irregular NoC platforms where permanent, transient, and intermittent faults can appear
statically or dynamically in the system. A fault-tolerant application mapping algorithm
has been presented which allocates the application tasks to the available, reachable, and
defect-free resources with the goal of maximizing the overall system performance.
• Due to variations in users’ behavior, the workload across different resources may
exhibit high variability even when using the same hardware platform. In Chapter 7,
extensible and flexible run-time resource management techniques have been presented
that allow systems to respond much better to run-time changes. In addition, we
proposed light-weight machine learning techniques for learning the user model at run-
time such that the systems are able to adapt dynamically to user needs. Given the
application characteristics, the on-line learned user model, and current system
configuration, our algorithm assigned the dynamic application tasks to the appropriate
resources such that the overall system performance is maximized. It has been
experimentally demonstrated that considering the user behavior during the resource
management process has an important impact on the system performance improvement.

188
8.2. Future Directions
The methodologies and user-centric ideas presented in this dissertation can open several
interesting research topics and challenges. In what follows, we summarize these directions.
8.2.1. Challenges Ahead for User-centric Embedded System Design
System-level approach (e.g., early performance analysis, evaluation) play an important
role in DSE, especially for large-scale embedded systems which consist of multiple
heterogeneous cores. Here, we highlight several important issues for designing embedded
systems (not just NoC platforms!) with users in mind.
• Model exploration and its level of granularity: Simply speaking, the proposed user-
centric design flow (see Figure 1.7(b)) is to explore models based on given data as
shown in Figure 8.1. Machine learning techniques help exploring robust models
together with useful parameters/features from given data for predicting the output result
as accurately as possible. More details for user model exploration and the corresponding
challenges are surveyed in Appendix A. In addition, having the right level of granularity
for application, platform, and user trace specification (see Chapter 2) is still opening
problem for embedded systems.
Figure 8.1 Model exploration for user-centric design flow.
model
data
datadata
model
data

189
• Human Dynamics: Systems are designed for humans. Exploring human dynamics helps
capturing individual human behavior and following specific human actions in ultimate
detail. Several study on human dynamics are already available, such as heavy tailed
distribution (also known as power law distribution) [11][69][70][163]. However, it is
still an open problem as to how one can incorporate human activity patterns in
embedded systems design.
• Workload Fidelity: Due to the user preference variation, it is required to understand the
buyer-to-be’s workload of target applications before designing a system [52]. Chen et
al. develop a workload analysis: recognition, mining, and synthesis (RMS) to model
events, objects, and concepts cased on end-user inputs which can be applied to
embedded systems, gaming, graphics, and even financial analytics [33]. With well
understanding of the workloads from different users, we could come out with the right
level of granularity for application specification, and later capture the main scenario for
system configuration for each specific user.
User-centric research for embedded systems is still at an early stage, and there is much
work that needs to be carried out, from modeling the user behavior, to analysis of various
workloads, and to user-aware DSE and optimization. However, we believe that making users
part of the design process is crucial for embedded systems design as this can lead to better and
more flexible designs in the future.
8.2.2. Increasing Flow Experience by Designing Embedded Systems
We argue that future embedded systems need to be designed using a flexible user-centric
design methodology geared primarily toward maximizing the user satisfaction (i.e., flow
experience) rather than only optimizing performance and power consumption. Therefore,
compared to the traditional design, we aim at re-focusing the current design paradigm by

190
placing the user behavior at the center of the design process and by using psychological
variables such as user ability and motivation as the main drivers of this process. This allows
systems to become more capable of adapting to different users' needs and of enhancing short-
and long-term user satisfaction.
Generally speaking, the flow experience is a mental state in which an individual feels
completely immersed in the task or activity at hand. Think, for instance, of web browsing.
While in flow, the user experiences enhanced motivation, concentration, positive affect, and
task involvement [45]. Theoretically, an individual achieves a state of flow when his/her
abilities match the challenges faced when engaged in executing a particular task. It has been
observed that designing interfaces that favor flow experiences helps increase the usability of
the information technology in use. Moreover, the increased user motivation experienced
during a flow episode guarantees continued use of technology and enhanced return behavior
[124].
Prior work in psychology indicates that while each task or application makes users feel
more or less stimulated, the optimal level of motivation (i.e., the flow experience) is achieved
by challenging tasks that match the user's abilities as seen in Figure 8.2 [45][167]. Indeed, if
the level of challenge presented by an application is low and does not engage the user, then the
user can quickly lose interest and get relaxed or even become bored by that particular activity
(see zones III and IV in Figure 8.2). However, if the task challenge is beyond the user's current
ability, then the activity becomes overwhelming and the user may feel frustrated or even
anxious (zone I in Figure 8.2). As shown in Figure 8.2, the flow zone (zone II) is reached only
when the task is challenging and the user's skills are great enough to deal with it; when
achieving a flow experience, the individual truly finds pleasure in doing the current activity
[45][147].

191
Therefore, from previous psychological research, mapping the relationship between the
task difficulty and the level of user ability is very important in predicting flow experience.
Applying this work to the embedded system design process, the experience of anxiety or
relaxation should prompt designers to either change the level of challenge in the system (e.g.,
CPU) or to motivate the user to increase his/her skill level in order to re-experience the flow
[147]. Thus, in order to maximize user flow experience, the traditional design paradigm needs
to be redefined by taking into consideration psychological variables such as user ability and
positive affect.
Looking forward, we believe that enhancing the users; flow experience offers a new
paradigm for understanding both individual and collective human functioning and
consequently plan to explore its implications for user-centric DSE of embedded systems.
Motivation and preliminary results are reported in [43]. We are hopeful that the future design
process will take into account the human nature of users and their ever-changing abilities and
interests.
Figure 8.2 Four-quadrant states in terms of challenge and skill level.
Skill Level
Cha
lleng
e Le
vel
I. Anxiety II. Flow
III. Boredom IV. Relaxation
Skill Level
Cha
lleng
e Le
vel
I. Anxiety II. Flow
III. Boredom IV. Relaxation

192

193
Bibliography
[1] H. Abdel-wahab, et al., “A proportional share resource allocation algorithm for real-time, time-shared systems,”
Proc. Real-Time Systems Symposium, 1996, pp. 288-299.
[2] S. N. Adya and I. L. Markov, “Fixed-outline floorplanning: enabling hierarchical design,” IEEE Trans. on VLSI
Systems, vol 11(6), Dec. 2003, pp. 1120-1135.
[3] R. Alur, D. L. Dill, “A theory of timed automata,” Theoretical Computer Science, 1994, vol. 126, pp. 183-235.
[4] G. Ascia, V. Catania, M. Palesi, “Multi-objective mapping for mesh-based NoC architectures,” Proc. Hardware/
Software Codesign and System Synthesis (CODES+ISSS), Sept. 2004, pp.182-187.
[5] G. Ascia, V. Catania, M. Palesi., “A multi-objective genetic approach to mapping problem on Network-on-Chip,”
Journal of Universal Computer Science, vol. 12, no. 4, 2006, pp. 370-394.
[6] A. Avd, “1.1 Billion Cell Phones Sold Worldwide In 2007, Says Study,” http://www.switched.com/2008/01/25/1-
1-billion-cell-phones-sold-worldwide-in-2007-says-study/.
[7] A. Baghdadi, et al., “An efficient architecture model for systematic design of application-specific multiprocessor
SoC,” Proc. DATE, 2001, pp. 55-63.
[8] F. Balarin, et al. Hardware-Software Co-design of Embedded Systems - The POLIS approach. Kluwer Academic
Publishers, 1997.
[9] N. Banerjee, P. Vellanki, K. S. Chatha, “A power and performance model for Network-on-Chip architectures,”
Proc. DATE, 2004, pp. 1250-1255.
[10] S. Bani-Mohammad, M. Ould-Khaoua, I. Ababneh, L. M. Mackenzie, “An efficient processor allocation strategy
that maintains a high degree of contiguity among processors in 2D mesh connected multicomputers.” Proc.
Computer Systems and Applications, 2007, pp. 934-941.
[11] A.-L. Barabási, “The origin of bursts and heavy tails in human dynamics,” Nature 435, 2005, pp. 207-211.
[12] M. Barr, “Architecting embedded systems for add-on software,” Embedded Systems Programming, Sept. 1999,
pp. 49-60.
[13] Bell, E. T. “Exponential Numbers” Amer. Math. Monthly 41, 1934, pp. 411-419 .
[14] C. M. Bender, M. A. Bender, E. D. Demaine, S. P. Fekete, “What is the optimal shape of a city?,” Journal of
Physics A: Mathematical and General, vol. 37, 2004, pp. 147-159.
[15] M. A. Bender, et al., “Communication-aware processor allocation for supercomputers,” Proc. Workshop on
Algorithms and Data Structure, Aug. 2005, pp. 169-181.
[16] C. M. Bender, M. A. Bender, E. Demaine, and S. Fekete, “What is the optimal shape of a city?,” Journal of Physics
A: Mathematical and General, vol. 37, 2004, pp. 147-159.
[17] L. Benini, G. De Micheli, “Networks on chip: a new paradigm for systems on chip design,” Proc. DATE, 2002, pp.
418-419.
[18] D. Bertozzi, and A. Jalabert, “NoC synthesis flow for customized domain specific multiprocessor systems-on-
chip,” IEEE Trans. Parallel Distrib. Syst., vol. 16, no. 2, Feb. 2005, pp. 113-129.

194
[19] S. Bertozzi, et al., “Supporting task migration in multi-processor systems-on-chip: a feasibility study,” Proc.
DATE, 2006, pp. 1-6.
[20] P. Bhojwani, et al., “A heuristic for peak power constrained design of network-on-chip (NoC) based multimode
systems,” Proc. VLSI Design, Jan. 2005, pp. 124-129.
[21] C. M. Bishop, Pattern Recognition and machine learning (Information Science and Statistics), 2006.
[22] R. Bitirgen, E. I.pek, and J.F. Martínez, “Coordinated management of multiple resources in chip multiprocessors:
A machine learning approach,” Intl. Symp. on Microarchitecture, Nov. 2008, pp. 318-329.
[23] S. Borkar, “Thousand core chips: a technology perspective,” in Proc. DAC, 2007, pp. 746-749.
[24] R. Burke, “The Wasabi Personal Shopper: a case-based recommender system,” Proc. Artificial intelligence States,
July 1999, pp. 844-849.
[25] I. V. Cadez, et al., “Model-based clustering and visualization of navigation patterns on a web site,” Data Mining
and Knowledge Discovery, 2003, pp. 399-424.
[26] I. V. Cadez, S. Gaffney, P. Smyth, “A general probabilistic framework for clustering individuals and objects,”
Proc. on Knowledge Discovery and Data Mining, Aug. 2000, pp. 140-149.
[27] E. Carvalho, N. Calazans, F. Moraes, “Heuristics for Dynamic Task Mapping in NoC-based Heterogeneous
MPSoCs,” IEEE/IFIP Workshop on Rapid System Prototyping, Porto Alegre, Brazil, May 2007, pp. 34-40.
[28] F. Catthoor, et al., “How can system-level design solve the interconnect technology scaling problem?,” Proc.
DATE, 2004, pp. 332-337.
[29] C. Chang and P. Mohapatra, “Improving performance of mesh connected multicomputers by reducing
fragmentation,” Journal of Parallel and Distributed Computing, vol. 52, no. 1, 1998, pp. 40-68.
[30] J.-M. Chang and M. Pedram, “Codex-dp: co-design of communicating systems using dynamic programming,”
IEEE Trans. Comput.-Aided Des. Integr. Circuits Syst. (TCAD), vol. 19, July 2000, pp. 732-744.
[31] K.S. Chathak, K. Srinivasan, G. Konjevod, “Automated techniques for mapping of application-specific network-
on-chip architectures,” IEEE Trans. Comput.-Aided Des. Integr. Circuits Syst. (TCAD), Aug. 2008, pp. 1425-
1438.
[32] S. Chatterjee, Z. Wei, A. Mishchenko, R. Brayton,“A linear time algorithm for optimum tree placement,” Intl.
Workshop on Logic and Synthesis, 2007.
[33] Y.-K. Chen, et al., “Convergence of recognition, mining, and synthesis workloads and its implications,” Proc. of
IEEE, 2008, pp. 790-807.
[34] P. Chen and K. Keutzer, “Towards true crosstalk noise analysis,” Proc. ICCAD, 1999, pp. 132-138.
[35] C.-L. Chou, R. Marculescu, “Incremental run-time application mapping for homogeneous NoCs with multiple
voltage levels,” Proc. Hardware/Software Codesign and System Synthesis (CODES+ISSS), Oct. 2007, pp. 161-
166.
[36] C.-L. Chou, R. Marculescu, “User-aware dynamic task allocation in Networks-on-Chip,” Proc. DATE, 2008, pp.
1232-1237.

195
[37] C.-L. Chou, U. Y. Ogras, R. Marculescu, “Energy- and performance-aware incremental mapping for Networks-
on-Chip with multiple voltage levels” IEEE Trans. on Computer-Aided Design of Integrated Circuits and Systems
(TCAD), vol. 27, no. 10, Oct. 2008, pp. 1866-1879.
[38] C.-L. Chou, R. Marculescu, “Run-time task allocation considering user behavior in embedded multiprocessor
Networks-on-Chip,” IEEE Trans. on Computer-Aided Design of Integrated Circuits and Systems (TCAD), vol. 19,
no. 1, Jan. 2010, pp. 78-91.
[39] C.-L. Chou, R. Marculescu, “Contention-aware application mapping for Network-on-Chip communication
architectures,” Proc. ICCD, Oct. 2008, pp. 164-169.
[40] C.-L. Chou, R. Marculescu, “User-centric design space exploration for heterogeneous Network-on-Chip
platforms,” Proc.DATE, April 2009, pp. 15-20.
[41] C.-L. Chou, R. Marculescu, “Designing heterogeneous embedded Network-on-Chip with users in mind,” to
appear, IEEE Trans. on Computer-Aided Design of Integrated Circuits and Systems (TCAD), 2010.
[42] C.-L. Chou, R. Marculescu, “Fault-tolerant algorithms for run-time resource allocation in many core systems,”
Proc. Semiconductor Research Corporation (SRC), TECHCON, 2009.
[43] C.-L. Chou, A. M. Miron, R. Marculescu, “Find your flow: Increasing flow experience by designing ‘Human’
Embedded Systems,” to appear, Proc. DAC, 2010.
[44] H. Cook, K. Skadron, “Predictive design space exploration using genetically programmed response surfaces,”
Proc. DAC, 2008, pp. 960-965.
[45] M. Csikszentmihalyi, “Flow: The psychology of optimal experience,” New York: Harper and Row, 1990.
[46] W. J. Dally and C. L. Seitz, “Deadlock-free message routing in multiprocessor interconnection networks,” IEEE
Trans. on Computer, 1987, pp. 547-553.
[47] W. J Dally, B. Towles, “Route packets, not wires: on-chip interconnection network,” Proc. DAC, 2001, pp. 684-
689.
[48] C. Darwin, On the origin of species by means of natural selection, or the preservation of favoured races in the
struggle for life,1859: ISBN 0-451-52906-5.
[49] S. Das, et al, “RazorII: In situ error detection and correction for PVT and SER tolerance,” IEEE Journal of Solid-
State Circuits, Jan. 2009, pp. 32-48.
[50] R. Dick, “Embedded system synthesis benchmarks suites (E3S),” http://ziyang.eecs.umich.edu/~dickrp/e3s/
[51] R. P. Dick, N. K. Jha, “MOGAC: A multiobjective genetic algorithm for hardware-software cosynthesis of
distributed embedded systems,” IEEE Trans. on Computer-Aided Design of Integrated Circuits and Systems
(TCAD), 1998, pp. 920-935.
[52] K. Diefendorff, and P. K. Dubey, “How multimedia workloads will change processor design,” Computer 30, 9,
Sept. 1997, pp. 43-45.
[53] T. Dumitras, S. Kerner, R. Marculescu, “Towards on-chip fault-tolerant communication,” Proc. ASP-DAC, 2003,
pp. 225-232.
[54] Eason, K. Information Technology and Organizational Change. 1st. Taylor & Francis, Inc. 1989.
196
[55] S. A. Edwards, “What do we do with 1012 transistors? The case for precision timing,” DSRC TeraChip Workshop,
2008.
[56] Bradley Efron, “Estimating the error rate of a prediction rule: improvement on cross-validation”, Journal of the
American Statistical Association, vol. 78, no. 382, 1983, pp. 316-331.
[57] Z. Feng, et al., Floorplan representation in VLSI, handbook of DATA structures and applications, by D.P. Mehta
and S. Sahni, Chapman and Hall, 2004, pp. 53-1: 53-29.
[58] C. Ferdinand, R. Wilhelm, “On predicting data cache behavior for real-time systems,” Proc. of the ACM Workshop
on Languages, Compilers, and Tools for Embedded Systems, 1998, pp.16-30.
[59] S. Fuller, RapidIO: The Embedded System Interconnect. ISBN: 0470092912.
[60] M. Geilen, T. Basten, “A calculator for pareto points,” Proc. DATE, 2007, pp. 16-20.
[61] S. V. Gheorghita, et al., “Automatic scenario detection for improved WCET estimation,” Proc. DAC, 2005, pp.
101-104.
[62] S. V. Gheorghita, T. Basten, H. Corporaal, “Application scenarios in streaming-oriented embedded-system
design,” IEEE Design & Test of Computers, vol. 25, no. 6, 2008, pp.581-589.
[63] S. V. Gheorghita, et al., “System-scenario based design of dynamic embedded system,” ACM Trans. on Design
Automation of Electronic Systems (TODAES), vol. 14, no. 1, Jan. 2009.
[64] M. Gomaa, et al., “Transient-fault recovery for chip multiprocessors,” Proc. ISCA, 2003, pp. 98-109.
[65] C. Grecu, et al., “Essential fault-tolerance metrics for NoC infrastructures,” On-Line Testing Symposium, 2007, pp.
37-42.
[66] M. Gries, “Methods for evaluating and covering the design space during early design development,” Integr. VLSI
Journal, 2004, pp. 131-183.
[67] Rebecca E. Grinter, “Systems architecture: product designing and social engineering,” ACM SIGSOFT Software
Engineering Notes, vol. 24, no. 2, 1999, pp.11-18.
[68] A. Gupta, B. Lin, P. A. Dinda, “Measuring and understanding user comfort with resource borrowing,” Proc. High
Performance Distributed Computing, June 2004, pp. 214-224.
[69] Mor Harchol-Balter, “The effect of heavy-tailed job size distributions on computer system design,” Proc. of the
ASA-IMS Conf. on Applications of Heavy Tailed Distributions in Economics, June 1999.
[70] T. Henderson and S. Bhatti, “Modelling user behaviour in networked games,” Proc of Intl. Conf. on Multimedia,
Sept. 2001, pp. 212-220.
[71] A. Hergenhan, W. Rosenstiel, “Static timing analysis of embedded software on advanced processor architectures,”
Proc. DATE, 2000, pp. 552-559.
[72] Y. Hoskote, “A 5-GHz Mesh Interconnect for a Teraflops Processor,” IEEE Micro, vol. 27, no. 5, Sept./Oct., 2007,
pp. 51-61.
[73] http://lava.cs.virginia.edu/HotSpot/
[74] http://src.alionscience.com/
[75] http://www.arm.com/products/solutions/axi_spec.html

197
[76] http://www.sematech.org/docubase/document/3955axfr.pdf
[77] http://www.wavecom.com/.
[78] Y. Hu, “Physical synthesis of energy-efficient networks-on-chip through topology exploration and wire style
optimization,” Proc. ICCD, 2005, pp. 111-118.
[79] J. Hu, R. Marculescu, “Energy- and performance-aware mapping for regular NoC architectures,” IEEE Trans. on
Computer-Aided Design of Integrated Circuits and Systems (TCAD), vol. 24, Apr. 2005, pp. 551-562.
[80] J. Hu, R. Marculescu, “Application-specific buffer space allocation for networks-on-chip router design,” Proc.
ICCAD, 2004, pp 354-361.
[81] J. Hu, R. Marculescu, “Energy-aware communication and task scheduling for network-on-chip architectures under
real-time constraints,” Proc. DATE, 2004, pp. 234-239.
[82] L. Huang, F. Yuan, and Q. Xu, “Lifetime reliability-aware task allocation and scheduling for MPSoC platforms,”
Proc. DATE, 2009, pp. 51-56.
[83] Intel Media processor CE 3100 [online] http://download.intel.com/design/celect/downloads/ce3100-product-
brief.pdf
[84] P. Ituero, et al., “Leakage-based on-chip thermal sensor for CMOS technology,” IEEE Intl. Symposium on Circuits
and Systems, 2007, pp.3327-3330.
[85] A. Jalabert, et al., “xpipesCompiler: A tool for instantiating application specific networks-on-chip,” Proc. DATE,
2005, pp. 884-889.
[86] N. E. Kang, W. Yoon, “Age- and experience-related user behavior differences in the use of complicated electronic
devices,” Int. J. Hum.-Comput. Stud., vol. 66, no. 6, 2008, pp 425-437.
[87] J. Kao, F. B. Prinz, “Optimal motion planning for deposition in layered manufacturing,” Proc. Design Engineering
Technical Conf., Sept. 1998, pp. 1-10.
[88] R. M. Karp, A. C. McKellar, C. K. Wong, “Near-optimal solutions to a 2-dimensional placement problem,” SIAM
Journal on Computing, vol. 4, 1975, pp. 271-286.
[89] J. Kao, F. B. Prinz, “Optimal motion planning for deposition in layered manufacturing,” Proc. Design Engineering
Technical Conf., Sept. 1998, pp. 13-16.
[90] D. I. Katcher, H. Arakawa, J. K. Strosnider, “Engineering and analysis of fixed priority schedulers,” IEEE Trans.
on Software Engineering, 1993, pp. 920-934.
[91] S. Khan, “Using predictive modeling for cross-program design space exploration in multicore systems,” Proc.
Parallel Architecture and Compilation Techniques, 2007, pp. 327-338.
[92] R. Kohavi, “A study of cross-validation and bootstrap for accuracy estimation and model selection.” Proc. of the
Fourteenth International Joint Conference on Artificial Intelligence, 1995, pp. 1137-1143.
[93] C. Y. Lee, “An algorithm for path connection and its applications,” IRE Trans. Electron Comput., vol. EC-10, Sept.
1961, pp. 346-365.

198
[94] H. G. Lee, N. Chang, U. Y. Ogras, R. Marculescu, “On-chip communication architecture exploration: A
quantitative evaluation of point-to-point, bus, and network-on-chip approaches,” ACM Trans. on Design
Automation of Electronic Systems (TODAES), vol. 12, no. 3, Aug. 2007.
[95] K. Li and K.-H. Cheng, “A two-dimensional buddy system for dynamic resource allocation in a partitionable mesh
connected system,” Journal of Parallel and Distributed Computing, vol. 12, 1991, pp. 79-83.
[96] M-L Li, et al., “Accurate microarchitecture-level fault modeling for studying hardware faults,” Intl. Conf. on High
Performance Computer Architecture, 2009, pp. 105-116.
[97] B. Lisper, “Fully automatic, parametric worst-case execution time analysis,” Workshop on Worst-Case Execution
Time (WCET) Analysis, 2003, pp. 77-80.
[98] W. Liu, V. Lo, K. Windisch, B. Nitzberg, “Non-contiguous processor allocation algorithms for distributed
memory multicomputers”, Proc. on Supercomputing, 1994, pp. 227-236.
[99] V. Lo, K. Windisch, W. Liu, and B. Nitzberg, “Non-contiguous processor allocation algorithms for mesh-
connected multicomputers,” IEEE Trans. on Parallel and Distributed Computing, vol. 8, no. 7, 1997, pp. 712-726.
[100]D. Lyonnard, et al., “Automatic generation of application-specific architectures for heterogeneous multiprocessor
system-on-chip,” Proc. DAC, 2002, pp. 518-523.
[101]J. Mache, V. Lo, “Dispersal metrics for non-contiguous processor allocation,” Technical Report, University of
Oregon, 1996.
[102]S. Manolache, P. Eles, and Z. Peng, “Fault and energy-aware communication mapping with guaranteed latency
for applications implemented on NoC,”Proc. DAC, 2005, pp. 266-269.
[103]Tom M. Mitchell. Machine Learning, ISBN: 0070428077, McGraw-Hill Science/Engineering/Math, 1997.
[104]S. Murali, G. De Micheli, “Bandwidth-constrained mapping of cores onto NoC architectures,” Proc. DATE, 2004,
pp. 896-901.
[105]S. Murali, et al., “Mapping and configuration methods for multi-use-case networks on chips,” Proc. ASP-DAC,
2006, pp. 146-151.
[106]S. Murali, et al., “A methodology for mapping multiple use-cases onto Networks on Chips,” Proc. DATE, 2006,
pp. 1-6.
[107]S. Murali, and G. De Micheli, G., “SUNMAP: a tool for automatic topology selection and generation for NoCs,”
Proc. DAC, 2004, pp. 914-919.
[108]S. Murali, et al.,“Designing application-specific networks on chips with floorplan information” Proc. ICCAD,
2006, pp. 355-362.
[109]S. Mohanty, et al., “Rapid design space exploration of heterogeneous embedded systems using symbolic search
and multi-granular simulation,” Proc. Joint Conference on Languages, Compilers and Tools For Embedded
Systems: Software and Compilers For Embedded Systems, 2002, pp. 18-27.
[110]A. A. F. Mohammad, R. Rudolf, J. Henkel, “ADAM: Run-time agent-based distributed application mapping for
on-chip communication,” Proc. DAC, 2008, pp. 760-765.

199
[111]O. Moreira, J. J. Mol, M. Bekooij, “Online resource management in a multiprocessor with a network-on-chip,”
Proc. ACM Symp. on Applied Computing, March 2007, pp.1557-1564.
[112]M. F. Morris, “Kiviat graphs: conventions and figures of merit,” SIGMETRICS Perform. Eval. Rev. 3, vol. 3, Oct.
1974, pp. 2-8.
[113]T. Moscibroda and Onur Mutlu, “A case for bufferless routing in on-chip networks,” Proc. ISCA, 2009, pp. 196-
207.
[114]F. Moya, J.M. Moya, J.C. Lopez, “Evaluation of design space exploration strategies,” Proc. EUROMICRO, pp.
472-476, 1999.
[115]. Neumaier, “Solving ill-conditioned and singular linear systems: A tutorial on regularization,” SIAM Review 40,
1998, pp. 636-666.
[116]T. Noergaard, Embedded Systems Architecture: A Comprehensive Guide for Engineers and Programmers
(Embedded Technology), Elsevier Science & Technology Books, 2005.
[117]V. Nollet, T. Marescaux, D. Verkerst, “Operating-system controlled network on chip,” Proc. DAC, 2004, pp. 256-
259.
[118]V. Nollet, et al., “Centralized run-time resource management in a network-on-chip containing reconfigurable
hardware tiles,” Proc. DATE, 2005, pp. 234-239.
[119]U. Y. Ogras, R. Marculescu, P. Choudhary, D. Marculescu, “Voltage-frequency island partitioning for GALS-
based networks-on-chip,” Proc. DAC, 2007, pp. 110-115.
[120]U. Y. Ogras, R. Marculescu, “Analytical router modeling for Networks-on-Chip performance analysis,” Proc.
DATE, 2007, pp. 1-6.
[121]B. Ozisikyilmaz, G. Memik, A. Choudhary, “Efficient system design space exploration using machine learning
techniques,” Proc. DAC, 2008, pp. 966-969.
[122]B. Ozisikyilmaz, G. Memik, and A. Choudhary, “Machine learning models to predict performance of computer
system design alternatives,” Proc. of international Conference on Parallel Processing (ICPP), 2008, pp. 495-502.
[123]O. Ozturk, M. Kandemir, S. W. Son, “An ILP based approach to reducing energy consumption in NoC-based
CMPS,” Proc. International Symposium on Low Power Electronics and Design (ISLPED), 2007, pp. 27- 29.
[124]S. Pace, “A grounded theory of the flow experiences of Web users,” Int. J. Human-Computer Studies, vol. 60,
2004, pp. 327-363.
[125]J. C. Palencia, M. González Harbour, “Schedulability analysis for tasks with static and dynamic offsets,” Proc. of
the Real-Time Systems Symposium, 1998, pp. 26-37.
[126]G. Paliouras, V. Karkaletsis, C. D. Spyropoulos. Machine Learning and Its Applications: Advanced Lectures,
Springer, 2001.
[127]A. M. Pastrnak, P. H. N. de With, S. Stuijk, J. van Meerbergen, “Parallel implementation of arbitrary-shaped
MPEG-4 decoder for multiprocessor Systems,” Proc. Visual Comm. and Image Processing, 2006.
[128]G. Prabhu, D. M. Frohlich, “Innovation for emerging markets: confluence of user, design, business and
technology research,” Proc. Human Computer Interaction, July 2005, pp. 22-27.

200
[129]Predictive Technology Model (PTM) website; http://www.eas.asu.edu/~ptm
[130]P. Pop, P. Eles, T. Pop, Z. Peng, “An approach to incremental design of distributed embedded systems,” Proc.
DAC, 2001, pp. 450-455.
[131]P. Pop, P. Eles, Z. Peng, “Bus access optimization for distributed embedded systems based on schedulability
analysis,” Proc. DATE, 2001, pp. 567-575.
[132]J. M. Rabaey, D. Burke, K. Lutz, J. Wawrzynek, “Workloads of the Future,” IEEE Design and Test of Computers,
vol. 25, no. 4, 2008, pp. 358-365.
[133]D. Rachovides, M. Perry, “HCI Research in the home: lessons for empirical research and technology
development,” Proc. Human Computer Interaction, vol. 2, Sept. 2006, pp. 11-15.
[134]V. Raghunathan, M. B. Srivastava and R. K. Gupta, “A survey of techniques for energy efficient on-chip
communication,” Proc. DAC, 2003, pp. 900-905.
[135]K. Ramamritham, J. A. Stankovic, P-F Shiah, “Efficient scheduling algorithms for real-time multiprocessor
systems,” IEEE Trans. on Parallel and Distributed Systems, 1990, pp. 184-194.
[136]P. Rantala, et al., “Agent-monitored fault-tolerant Network-on-Chips: concept, hierarchy, and case Study with
FFT Application,” DAC Workshop Digest in Diagnostic Services in Network-on-Chips, April 2008.
[137]C.-E. Rhee, H.-Y. Jeong, S. Ha, “Many-to-many core-switch mapping in 2-D mesh NoC architectures,” Proc.
ICCD, 2004, pp. 438-443.
[138]K. Richter, D. Ziegenbein, M. Jersak, and R.Ernst, “Bottom-up performance analysis of HW/SW platforms,”
Proc. of the IFIP World Computer Congress - Tc10 Stream on Distributed and Parallel Embedded Systems:
Design and Analysis of Distributed Embedded Systems, Aug. 2002, pp. 173-183.
[139]R. Rouse, Game design: theory and practice, Wordware Game Developer's Library, 2001.
[140]G. Sassatelli, et al., “Run-time mapping and communication strategies for Homogeneous NoC-Based MPSoCs,”
Proc IEEE Symposium on Field-Programmable Custom Computing Machines, 2007, pp. 295-296.
[141]B. Schilit, N. Adams, and R. Want, “Context-aware computing applications,” IEEE Workshop on Mobile
Computing Systems and Applications, 1994, pp. 85-90.
[142]T. Schonwald, et al., “Fully adaptive fault-tolerant routing algorithm for Network-on-Chip architecture,” Proc.
Digital System Design Architectures, Methods and Tools, 2007, pp. 527-534.
[143]B. Sethuraman, R. Vemuri, “optiMap: a tool for automated generation of NoC architectures using multi-port
routers for FPGAs,” Proc. DATE, 2006, pp. 947-952.
[144]L. Sha, R. Rajkumar, and S. S. Sathaye, “Generalized rate-monotonic scheduling theory: a framework for
developing real-time systems,” Proc. of the IEEE, vol. 82, no.1, Jan. 1994, pp.68-82.
[145]S. Shamshiri, et al., “A cost analysis framework for multi-core systems with spares,” Proc. Int. Test Conference,
2008, pp. 1-8.
[146]S. Shamshiri and K.-T. Cheng, “Yield and cost analysis of a reliable NoC,” IEEE VLSI Test Symposium, 2009, pp.
173-178.

201
[147]D.J. Shernoff et al., “Student engagement in high school classrooms from the perspective of flow theory,” School
Psychology Quarterly, 18, 2003, pp. 158-176.
[148]H. Shimazu, “ExpertClerk: Navigating shoppers buying process with the combination of asking and proposing,”
Proc. Joint Conference on Artificial Intelligence, 2001, pp. 1443-1450.
[149]H. Shimazu, “ExpertClerk: a conversational case-based reasoning tool for developing salesclerk agents in e-
commerce webshops,” Artificial Intelligence Review 18(3-4), pp. 223-244.
[150]H. Shojaei, et al., “SPaC: A symbolic pareto calculator,” Proc. CODES+ISSS, 2008, pp. 179-184.
[151]H. Shojaei, et al., “A parameterized compositional multi-dimensional multiple-choice knapsack heuristic for
CMP run-time management,” Proc. DAC, 2009, pp. 917-922.
[152]A. Shye, et al.,“Power to the People: Leveraging Human Physiological Traits to Control Microprocessor
Frequency,” Proc. MICRO, Nov. 2008, pp. 188-199.
[153]A. Shye, et al.,“Learning and Leveraging the Relationship between Architecture-Level Measurements and
Individual User Satisfaction,” Proc. ISCA, June 2008, pp. 427-438.
[154]L. T. Smit, et al., “Run-time assignment of tasks to multiple heterogeneous processors,” Progress Embedded
Systems Symp., Oct. 2004, pp. 185-192.
[155]L. I. Smith, “A tutorial on principal components analysis”, citeulike:353145, February 26, 2002.
[156]Sonics Integration Architecture. Available [online] http://www.sonicsinc.com
[157]H. Spencer, The Principles of Sociology, 1897, New York: D. Appleton.
[158]K. Srinivasan, et al., “An automated technique for topology and route generation of application Specific on-chip
interconnection networks,” Proc. ICCAD, 2005, pp. 231-237.
[159] K. Srinivasan, K. S. Chatha, “A technique for low energy mapping and routing in network-on-chip architectures,”
Proc. International Symposium on Low Power Electronics and Design (ISLPED), 2005, pp. 387-392.
[160]STMicroelectronics STBus Interconnect [online] http://www.st.com/stonline/products/technologies/soc/
stbus.htm
[161]T. T. Suen and J. S. Wong, “Efficient task migration algorithm for distributed systems,” IEEE Trans. Parallel
Distrib. Syst. vol. 3, 1992, pp. 488-499.
[162]Task graphs for free (TGFF v3.0) Keith Vallerio, 2003. http://ziyang.eecs.umich.edu/~dickrp/tgff/.
[163]A. Vázquez, et al., “Modeling bursts and heavy tails in human dynamics,” Physical Review E73, 036127, 2006.
[164]D. Wentzlaff, et al., “On-Chip Interconnection Architecture of the Tile Processor,” IEEE MICRO, vol. 27, no. 5,
2005, pp. 15-31.
[165]K. Windisch and V. Lo, “Contiguous and non-contiguous processor allocation algorithms for k-ary n-cubes”,
Proc. Intl. Conference on Parallel Processing, 1995, pp. 164-168.
[166]F. Wolf, R. Ernst, “Execution cost interval refinement in static software analysis,” J. Syst. Archit. 47, 3-4, Apr.
2001, pp. 339-356.
[167]R. A. Wright, and J. W. Brehm, “Energization and goal attractiveness,” In L.A. Pervin (Ed.), Goal concepts in
personality and social psychology, 1989, pp. 169-210, Hillsdale, NJ: Erlbaum.

202
[168]S. Yan and Bill Lin, “Application-specific network-on-chip architectures synthesis based on set partitions and
Steiner trees”, Proc. ASPDAC, 2008, pp. 277-282.
[169]P. Yang, et al.,“Managing dynamic concurrent tasks in embedded real-time multimedia systems,” Proc. of the
Symposium on System Synthesis (ISSS), 2002, pp. 112-119.
[170]T. T. Ye, L. Benini, and G. De Micheli, “Analysis of power consumption on switch fabrics in network routers,”
Proc. DAC, 2002, pp. 524-529.
[171]N.-E. Zergainoh, A. Baghdadi, A. Jerraya, “Hardware/software codesign of on-chip communication architecture
for application-specific multiprocessor system-on-chip,” Int. J. Embedded Systems, vol. 1, 2005, pp. 112-124.

203
APPENDIX A. MACHINE LEARNING TECHNIQUES SURVEY
FOR USER-CENTRIC DESIGN
Generally speaking, machine learning is the study of algorithms that allow machines/
computers/systems to learn based on the experience (i.e. collected training data) in such a
manner and later improved this expected performance [103]. In recent years, machine learning
has made its way from artificial intelligence into areas of administration, commerce, and
industry. In addition, it became the preferred approach for speech recognition, computer
vision, medical analysis, robot control, computational biology, sensor networks, etc [126].
More recently, for general systems design, Ozisikyilmaz et al. applied linear regression and
neural network methods on small portions of data through cycle-accurate simulations to
predict the performance of the entire design space [121][122]. Bitirgen et al. applied neural
network approach on multiple shared chip multiprocessor resources to enforce higher-level
performance objectives [22].
In this appendix, we study how machine learning algorithms can help user-centric
embedded system design. As mentioned in Section 1.4.2, five types of problems, i.e.
classification, similarity, clustering, regression, and reinforcement learning problems (see “*”
in Figure 1.8)) from user-centric design flow can be solved using machine learning
techniques. On example is shown in the case study of NoC embedded system (see Figure 4.1),
we explore the k-mean clustering methods for classifying user traces. Here, we first
explain these five types of problems (see Figure A.1(a)) and its applications. Later,
several machine learning techniques will be investigated to solve these problems (see
Figure A.1(b)).

204
• i) Classification: Given a data-set X = {x1, x2,...,xi} and the corresponding discrete
class-set Y = {y1, y2,...,yj}, the classification problem is to classify the new data xnew to
one class in Y. As example can be shown for medical diagnosis (i.e. diagnose whether
the patient gets cancer or not given medical reports from many patients). In our case of
user-centric embedded design for Figure 4.1, we can identify which class the new user/
customer belongs to and is suitable for which generated platform.
• ii) Similarity: Given a data-set X = {x1, x2,...,xi}, the similarity problem is to find some
similar data in this set for a given feature. Finding similar images in Google websites,
(a) (b)
classification
(from data todiscrete classes)
which class?
similarity
(finding data)
finding similar hair type as
clustering
(discovering structure in data)
clustered by head shape
reinforce learning
(training by feedback)
good goodfeedback
bad
badbadgood
good bad good
time (day)
246
hair
am
ount
regression
(predicting anumeric value)0 5 10 15 20
How many hairs at 20th day?
5
problemsselected machine
learning approaches
Naïve Bayes (NB)
Support Vector Machine (SVM)
K-nearest neighbor
Logistic regression
Decision tree
K-means
Neural Networks
Q-learning
Hidden Markov Model (HMM)
Gaussian Mixed Model (GMM)
Bayesian Networks
Figure A.1 (a) Five types of problems for user-centric design i) classification ii)regression iii) similarity iv) clustering v) reinforcement learning (b) Selected machinelearning approaches.
205
listing similar products in Amazon websites, etc. belong to this category. As an
example, in our case, it is highly recommended to figure out the similarity between
users while interacting with the system.
• iii) Clustering: Given a data-set X = {x1, x2,...,xi}, the clustering problem is to assign
similar data in the same group/cluster; that is to discover the structure in data. As an
example of sequence analysis in computational biology, clustering is used to group
homologous sequences into gene families. For our case study in Chapter 4, we explore
the k-mean clustering methods for grouping user traces with some similarity
coefficients.
• iv) Regression: The regression problem is to predict a numeric value from previous
data, as well as the potential trend. Examples can also be shown in the stock market, and
the temperature prediction for following days. For use-centric design, we can apply it
for off-line DSE for predicting the performance of the entire design space with small
portions of data [121][122] and for on-line optimization for predicting the application
execution time for certain user with the goal of improving system performance
improvement [22][36].
• v) Reinforcement learning: The reinforcement learning problem is to allow the machine/
agent to learn its behavior based on feedback from the environment. This behavior can
be learnt once, or keep on adapting as time goes by. It is widely used in robot design, i.e.
robot navigation where collision avoidance behavior can be learnt by negative feedback
from bumping into obstacles. In terms of user-centric design, the system is suggested to
update its strategies dynamically based on the users’ feedback [152][153].

206
Now, we propose to use some popular machine learning approaches [21] to solve these
five problems as shown in Figure A.1(b). The arrow from problem A to method B in
Figure A.1 implies that the problem A have been solved using the method B in the literature.
However, even applying those methods, there still exists various challenges in solving
these problems where we mention a few as follows. Techniques such as cross-validation [56],
regularization [115], have been proposed in order to avoid model over-fitting, i.e. if it is more
accurate for training dataset but less accurate in predicting new data or unseen testing dataset.
Principal component analysis (PCA) [155] is widely used to reduce the problem
dimensionality, i.e. to develop a smaller number of artificial variables (called principal
component) from a number of observed variables without much loss of information.
Bootstrapping approach is suggested to be applied if we have scarce training dataset, i.e. when
the model has too many variables and there are not enough participants/observations [92].

207
APPENDIX B. ILP-BASED CONTENTION-AWARE APPLICA-
TION MAPPING
B.1. Introduction
In this appendix, we analyze the impact of network contention on the application mapping
for 2D mesh-based NoC architectures. Our main theoretical contribution consists of an integer
linear programming (ILP) formulation of the contention-aware off-line application mapping
problem which aims at minimizing the type of network contention which highly affect the
system performance [39].
Previous work attempts to minimize the communication energy consumption
[79][123][137][159]. However, the communication energy consumption is a good indicator of
latency only if there is no congestion in the network. Indeed, in the absence of congestion,
packets are injected/transmitted through the network as soon as they are generated and then
latency can be estimated by counting the number of hops from source to destination.
Compared to previous work, our focus in this appendix is on the network contention problem;
this highly affects the latency, throughput, and communication energy consumption. We show
that, by mitigating the network contention, the packet latency can be significantly reduced;
this means that the network can support more traffic which directly translates into significant
throughput improvements.
B.2. Preliminaries
As mentioned in Section 2.2, the target application has been done the off-line analysis. To
better explain the off-line application mapping, we need to first introduce the following
definitions:
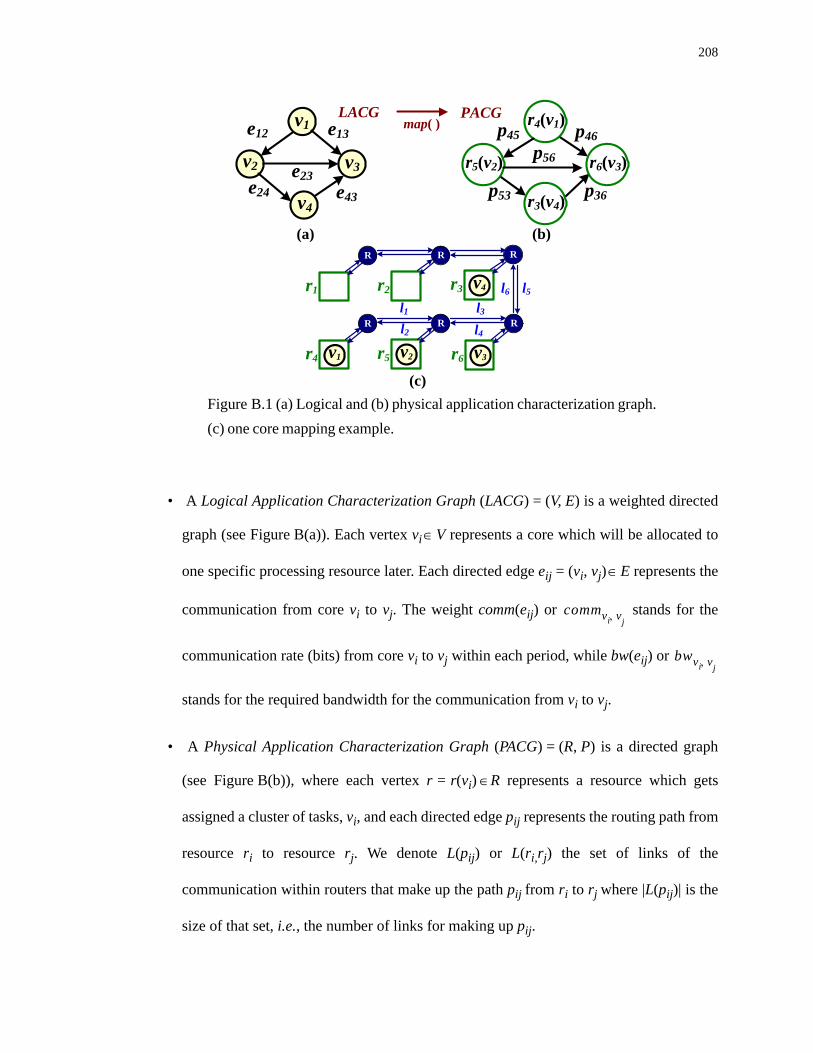
208
• A Logical Application Characterization Graph (LACG) = (V, E) is a weighted directed
graph (see Figure B(a)). Each vertex vi V represents a core which will be allocated to
one specific processing resource later. Each directed edge eij = (vi, vj) E represents the
communication from core vi to vj. The weight comm(eij) or stands for the
communication rate (bits) from core vi to vj within each period, while bw(eij) or
stands for the required bandwidth for the communication from vi to vj.
• A Physical Application Characterization Graph (PACG) = (R, P) is a directed graph
(see Figure B(b)), where each vertex r = r(vi) R represents a resource which gets
assigned a cluster of tasks, vi, and each directed edge pij represents the routing path from
resource ri to resource rj. We denote L(pij) or L(ri,rj) the set of links of the
communication within routers that make up the path pij from ri to rj where |L(pij)| is the
size of that set, i.e., the number of links for making up pij.
Figure B.1 (a) Logical and (b) physical application characterization graph.(c) one core mapping example.
(a) (b)
(c)
v1
v4
e13
e43
e12
v3v2
e24
r4(v1)p45
p53
p46
r5(v2) r6(v3)
r3(v4)
LACG PACGmap( )
p36
e23
p56
l1
l2
l3
R
l4R RR
l5l6
r6 v3r5 v2r4 v1
r3 v4
RR
r2r1
∈
∈
commvi v, j
bwvi v, j
∈

209
A mapping function map( ) maps the cores in the LACG to the resources in the NoC;
under a given routing mechanism, this results in the PACG.
Figure B(c) shows the mapping result of the LACG under the deterministic XY routing:
cores v1, v2, v3, and v4 are mapped onto resources r4, r5, r6, and r3, respectively, and
L(p45) = {l1}, L(p46) = {l1, l3}, L(p53) = {l3, l6}, L(p36) = {l5}, and L(p56) = {l3}. Note that as
defined the types of network contention in Section 6.3.1, source-based contention occurs in
this case since L(p45) L(p46) = {l1} , while the destination-based contention occurs
since L(p46) L(p56) = {l3} . And the path-based contention occurs since
L(p46) L(p53) = {l3} . With the motivation of significant impact on path-based
contention (see discussion in Figure 6.3), in what follows, we summarize our ILP-based
contention-aware mapping with path-based contention minimized.
B.3. Problem Formulation
Given the application characteristics and the NoC architecture, our objective is to map the
IP cores onto the NoC resources such that the sum of the weighted communication distance
and path-based network contention are minimized under a given routing mechanism. Of note,
minimizing the weighted communication distance directly contributes to minimizing the
communication energy consumption as well. More formally:
Given the LACG of the application, the routing mechanism, and the NoC architecture
Find a mapping function map( ) from LACG = (V, E) to PACG = (R, P) which minimizes:
min{ (B.1)
+ } for i k and j l
such that:
∩ ∅≠
∩ ∅≠
∩ ∅≠
1 α–( )β
----------------- comm eij( ) L map eij( )( )×[ ]eij∀ E∈∑×
αγ--- L map eij( )( ) L map ekl( )( )∩× ≠ ≠

210
(B.2)
(B.3)
(B.4)
where if and Bk is the capacity for link lk
Since the communication distance and path-based contention count have different units,
the normalization of these two metrics is approximated by assuming a worst-case scenario.
More precisely, β is set to ( ) × ( ) for an N × N NoC platform,
where the second factor, , is the longest distance in the network. γ is set to the
average number of path-based contentions of reasonable random mapping configurations. α is
a weighting coefficient meant to balance the communication distance and the contention
count. More precisely, we set α as the ratio of “the number of cores” to “the number of
resources + 1” (i.e., α = |V|/(|R| + 1)). If the number of cores is much smaller than the number
of resources (i.e., α is small), in order to avoid a higher communication distance, the first term
in (1) has a higher weight. Equation B.2 and Equation B.3 basically mean that each core
should be mapped to exactly one resource and no resource can host more than one core.
Finally, Equation B.4 guarantees that the load of each link will not exceed its bandwidth.
B.4. ILP-based Contention-aware Mapping Approach
B.4.1. Parameters and Variables
The given parameters are as follows:
• stands for the Manhattan Distance from resource rs to rt.
vi∀ V∈ , map vi( ) r vi( ) R∈=
vi∀ vj≠ V,∈ r vi( ) r vj( )≠
link lk∀ bwvi v, jlkmap vi( ) map vj( ),
Bk≤×vi vj,( )∀ E∈
∑,
lkmap vi( ) map vj( ),
1= lk L map vi( ) map vj( ),( )∈
comm eij( )eij∀ E∈∑ 2 N 1–( )×
2 N 1–( )×
MDrsrt

211
• The NoC architecture consists of |K| uni-directional segment links with IDs {l1, l2, ...,
l|K|}.
• For each link lk, where k = 1~|K|, represents whether or not this link lk is part of the
routing path from resource rs to resource rt, i.e., . Of note,
the above parameters are known under a given NoC architecture with a fixed routing
mechanism.
The variables of interest are as follows:
• shows the mapping result and can only take values in {0, 1}. More precisely, this
variable is set to 1, if the core vi is mapped onto resource rs.
• shows the communication path result and can only be {0, 1}. This variable is set to
1, if the communication path is made up from resources rs to rt, where cores vi and vj are
mapped onto.
• shows the path-based contention and can only be {0, 1}. This
variable is set to 1, while the cores vi, vj, vm, and vn are mapped onto resources rs, rt, rp,
and rq and at the same time, the communication path from resource rs to resource rt
shares the link lk with the path from resource rp to resource rq.
B.4.2. Objective Function
Our objective is to minimize the weighted communication distance and the path-based
network contentions as well, i.e.,
lkrsrt
lkrsrt 1 if lk L rs rt,( )∈,
0 otherwise ,⎩⎨⎧
=
mvi
rs
pvivj
rsrt
zlk_ vivjvmvnrsrtrprq( )

212
{
} (B.5)
B.4.3. Constraints
The following constraints are used:
• One-to-one core-to-resource mapping: Each resource cannot accept more than one core
(see Equation B.6). Each core should be mapped onto a specific resource (see Equation
B.7). Equation B.8 makes sure that variables are set to be either 0 or 1.
(B.6)
(B.7)
(B.8)
• Communication path: Any two communicating cores that belong to two different
resources make up a path. Therefore,
(B.9)
To transform Equation B.9 into an ILP formulation, we impose the following constraints:
(B.10)
(B.11)
• Bandwidth constraint on each link: For each k, all possible paths through link lk cannot
exceed its bandwidth Bk.
1 α–( )β
----------------- commvi vj, MDrsrtpvivj
rsrt×r∀ s rt, R∈
∑⎝ ⎠⎜ ⎟⎛ ⎞
×vi vj,( )∀ E∈
∑×
αγ--- zlk_ vivjvmvnrsrtrprq( )
lk∀vi vj,( )∀ vm vn,( ), E∈
rs∀ rt rp rq, , , R∈
∑×+
mvi
rs
rs∀ R∈ mvi
rs 1≤vi∀ V∈∑,
vi∀ V∈ mvi
rs
rs∀ R∈∑, 1=
vi V rs R∈,∈∀ 0 m≤ vi
rs, 1≤
vi vj,( )∀ E∈ pvivj
rsrt 1 if mvi
rs 1=⎝ ⎠⎛ ⎞ and mvj
rt 1=⎝ ⎠⎛ ⎞,
0 otherwise ,⎩⎪⎨⎪⎧
=,
mvi
rs mvj
rt 1–+ pvivj
rsrtmvi
rs mvj
rt+
2----------------------≤ ≤
0 p≤ vivj
rsrt 1≤

213
(B.12)
• Path-based network contention count: This type of contention occurs when two paths
with different sources or different destinations contend for the same link. Therefore,
(B.13)
if (B.14)
To transform Equation B.14 into an ILP formulation, we impose the following constraints:
(B.15)
(B.16)
Equation B.15 and Equation B.16 determine whether or not the path-based contention
occurs; if so, this variable is set to be 1.
B.5. Experimental Results
B.5.1. Experiments using Synthetic Applications
We first evaluate the number of path-based contentions on application mapping for a 4 × 4
NoC platform under three different scenarios: random (or adhoc) mapping, energy-aware
mapping [79] and our contention-aware mapping. Several sets of synthetic applications are
generated using the TGFF package [162]. The number of cores used in this experiment ranges
from 12 to 16, while the number of edges varies from 15, 20, ..., to 60 (organized in 10
categories). For each category, we generate 100 random task graphs and the corresponding
bwvi v, jlkrsrt× pvivj
rsrt Bk≤×vi vj,( )∀ E∈
∑rs∀ rt, R∈
∑
lkrsrt∀ L rs rt,( )∈⎝ ⎠
⎛ ⎞ & lkrprq∀ L rp rq,( )∈⎝ ⎠
⎛ ⎞
vi vj,( )∀ vm vn,( ), E∈i m & j n≠ ≠
rs∀ rt rp rq, , , R∈
zlk_ vivjvmvnrsrtrprq( ) 1= mvi
rs mvj
rt mvm
rp mvn
rq 1= = = =
pvivj
rsrt pvmvn
rprq lkrsrt lk
rprq 3–+ + + zlk_ vivjvmvnrsrtrprq( )≤
0 z≤ lk_ vivjvmvnrsrtrprq( ) 1≤

214
results (i.e., number of contentions, communication energy consumption, system throughput)
are calculated.
Figure B.2 shows the number of path-based contentions comparing these three scenarios,
while Table B.1 shows the communication energy ratio and throughput savings normalized to
the results of energy-aware mapping approach in [79] and contention-aware mapping
approaches for the selected categories (the number of edges set to 20, 30, 40, and 50). Of note,
The communication energy consumption and the packet latency are measured by a C++
simulator using the bit energy model in [170].
Table B.1 Energy and throughput comparison between energy-aware in [79] and contention-aware mapping.
As we can see in Figure B.2, the contention-aware mapping effectively reduces the path-
based contention. Moreover, the reduction increases as the number of edges scales up. For
instance, for task graphs with 50 edges, the number of path-based contention in the mapping
configuration can be reduced from 36 to 5. As observed in Table B.1, under the contention-
# of edges 20 30 40 50communication energy ratio 1.02 1.07 1.11 1.08
throughput savings 18.2% 24.1% 21.8% 13.5%
15 20 25 30 35 40 45 50 55 600
20
40
60random mappingenergy-aware mappingcontention-aware mapping
Figure B.2 Path-based contention count in a 4 × 4 NoC comparing therandom, energy-aware in [79] and contention-aware mapping.
# of edges in the task graph
cont
entio
n#
of p
ath-
base
d

215
aware mapping, the communication energy consumption is up to 11%1 larger compared to the
energy-aware mapping solution; however, the system throughput can be improved around
19.4%, on average. From Figure B.2 and Table B.1, it can be concluded that the contention-
aware mapping effectively reduces the path-based contention which achieves great system
throughput improvement with negligible energy loss.
B.5.2. Experiments using Real Applications
To evaluate the potential of our contention-aware idea for real-time examples, we apply it to
several benchmarks, such as examples with high degree of parallelism (Parallel-1 and Parallel-
2) [143], LU Decomposition [143], and MPEG4 decoder [159]. In Table B.2, the first three
benchmarks are mapped onto a 3 × 3 NoC platform, while the last is onto a 4 × 4 NoC platform.
The first through the fifth columns in Table B.2 show, respectively, the name of the benchmark,
the number of cores and edges in the LACG, the communication energy loss and the throughput
savings of our contention-aware solution compared to the energy-aware solution [79].
As seen in Table B.2, our contention-aware solution can achieve 17.4% throughput
savings, on average, with the communication energy loss within 9% compared to energy-
aware solution in [79].
Table B.2 Communication energy overhead and throughput improvement of our contention-aware solution compared to the energy-aware solution [79].
1. We note that this is only the communication energy part. If the communication energy consumptionis around 20% of the total energy consumption (as shown in [94]), we have only 2.2% energy loss.
benchmarks cores edgescomm. energy
overheadthroughput
improvementParallel-1 9 13 0% 16.9%Parallel-2 9 15 8.8% 20.4%
LU Decomposition 9 11 6.5% 14.1%MPEG4 Decoder 12 26 3.6% 18.2%

216
Figure B.3 plots the LACG of the Parallel-1 benchmark (see Figure B.3(a)), the mapping
results under two scenarios: energy-aware mapping [79] using ILP approach and our
contention-aware mapping approach (see Figure B.3(b) and (c), respectively), while the
average packet latency comparison for different injection rates in these two scenarios (see
Figure B.3(d)). The existing path-based contentions are highlighted in the mapping results. As
seen the energy-aware mapping result in Figure B.3(b), there are two pairs of path-based
contention in the network, while no path-based contention occurs when using the contention-
aware approach. We observe that for such path-based contention, the average latency goes up
dramatically after the packet injection rate exceeds a critical point (i.e. the network gets into
the congestion mode, see Figure B.3(d)). Also, when contention-aware constraints are taken
into consideration during the mapping process, the throughput for Parallel-1 moves from
0.2173 (packet/cycle) to 0.254 which represents about 16.9% throughput improvement.
0.1 0.15 0.2 0.25 0.30
100
200
300
400 energy-aware mapping [5]contention-aware mapping
12
3
46 8
7 9
5 12
3
468
7 9
5
1
2 3 4
6
87
9
5
Figure B.3 (a) Parallel-1 benchmark (b)(c) Mapping results of the energy-aware approach [79] and our contention-aware method (d) Average packetlatency and throughput comparison under these two mapping methods.
avg.
pac
ket l
aten
cy
Parallel-1
path-based contention
packet injection rate (packet/cycle)
(a) (b) (c)
(d)

217
B.6. Summary
In this appendix, we have addressed the issue of off-line core-resource mapping for NoC-
based platforms while considering the critical network contention minimization. We have
reported our results obtained from many experiments involving both synthetic and real
benchmarks. Experimental results show that, compared to other existing mapping approaches
based on communication energy minimization, our contention-aware mapping technique (with
the goal of reducing the path-based network contention) achieves a significant decrease in
packet latency (and implicitly, a throughput increase) with a negligible communication energy
overhead.
Although in this appendix we focus on 2-D mesh NoCs with XY routing, our idea can be
further adapted to other architectures implementing under different network topologies with
deterministic routing schemes. Moreover, the idea of minimizing the network contention is
not limited to core-resource mapping as presented. Instead, it can be applied to other NoC
synthesis problems and the mapping/scheduling heuristics on parallel systems to achieve
further system throughput improvements.


















