Design of a virtual reality training system for human–robot … · proof Int J Interact Des Manuf...
16
See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/271837242 Design of a virtual reality training system for human–robot collaboration in manufacturing tasks Article in International Journal for Interactive Design and Manufacturing (IJIDeM) · February 2015 DOI: 10.1007/s12008-015-0259-2 CITATIONS 9 READS 799 2 authors: Some of the authors of this publication are also working on these related projects: Automation of CFRP part manufacturing in small batches View project Low-cost high-performance Fused Fillament Fabrication View project Elias Matsas National Technical University of Athens 12 PUBLICATIONS 48 CITATIONS SEE PROFILE George-Christopher Vosniakos National Technical University of Athens 151 PUBLICATIONS 1,637 CITATIONS SEE PROFILE All content following this page was uploaded by Elias Matsas on 06 February 2015. The user has requested enhancement of the downloaded file.
Transcript of Design of a virtual reality training system for human–robot … · proof Int J Interact Des Manuf...

Seediscussions,stats,andauthorprofilesforthispublicationat:https://www.researchgate.net/publication/271837242
Designofavirtualrealitytrainingsystemfor
human–robotcollaborationinmanufacturing
tasks
ArticleinInternationalJournalforInteractiveDesignandManufacturing(IJIDeM)·February2015
DOI:10.1007/s12008-015-0259-2
CITATIONS
9
READS
799
2authors:
Someoftheauthorsofthispublicationarealsoworkingontheserelatedprojects:
AutomationofCFRPpartmanufacturinginsmallbatchesViewproject
Low-costhigh-performanceFusedFillamentFabricationViewproject
EliasMatsas
NationalTechnicalUniversityofAthens
12PUBLICATIONS48CITATIONS
SEEPROFILE
George-ChristopherVosniakos
NationalTechnicalUniversityofAthens
151PUBLICATIONS1,637CITATIONS
SEEPROFILE
AllcontentfollowingthispagewasuploadedbyEliasMatsason06February2015.
Theuserhasrequestedenhancementofthedownloadedfile.

unco
rrec
ted
pro
of
Int J Interact Des Manuf
DOI 10.1007/s12008-015-0259-2
ORIGINAL PAPER
Design of a virtual reality training system for human–robot
collaboration in manufacturing tasks
Elias Matsas · George-Christopher Vosniakos
Received: 9 October 2014 / Accepted: 29 January 2015
© Springer-Verlag France 2015
Abstract This paper presents a highly interactive and1
immersive Virtual Reality Training System (VRTS)2
(“beWare of the Robot”) in terms of a serious game that sim-3
ulates in real-time the cooperation between industrial robotic4
manipulators and humans, executing simple manufacturing5
tasks. The scenario presented refers to collaborative handling6
in tape-laying for building aerospace composite parts. The7
tools, models and techniques developed and used to build8
the “beWare of the Robot” application are described. System9
setup and configuration are presented in detail, as well as user10
tracking and navigation issues. Special emphasis is given to11
the interaction techniques used to facilitate implementation12
of virtual human–robot (HR) collaboration. Safety issues,13
such as contacts and collisions are mainly tackled through14
“emergencies”, i.e. warning signals in terms of visual stim-15
uli and sound alarms. Mental safety is of utmost priority and16
the user is provided augmented situational awareness and17
enhanced perception of the robot’s motion due to immersion18
and real-time interaction offered by the VRTS as well as by19
special warning stimuli. The short-term goal of the research20
was to investigate users’ enhanced experience and behav-21
iour inside the virtual world while cooperating with the robot22
and positive pertinent preliminary findings are presented and23
briefly discussed. In the longer term, the system can be used24
to investigate acceptability of H–R collaboration and, ulti-25
mately, serve as a platform for programming collaborative26
H–R manufacturing cells.27
E. Matsas · G.-C. Vosniakos (B)
School of Mechanical Engineering, National Technical University
of Athens, Heroon Polytechniou 9, 15780 Zografou-Athens, Greece
e-mail: [email protected]
E. Matsas
e-mail: [email protected]
Keywords Virtual reality · Human–robot collaboration · 28
Safety · Manufacturing training · Interaction · Serious game 29
1 Introduction 30
In modern manufacturing systems an emerging need for 31
cooperation (or collaboration) and work-space sharing of 32
industrial robots and humans to execute manufacturing tasks 33
has arisen. The goal of this coexistence and collaboration is 34
to improve quality and productivity by enhancing workers’ 35
sensory-motor abilities, knowledge and dexterity in manually 36
performed tasks with the strength, accuracy and repeatabil- 37
ity of robots. In this case, rather than replacing the human’s 38
work with robots in repetitive and alienating tasks, collab- 39
orative assistance of robots can lead workers to perform 40
“value-added work” [1]. Robots are already used for teaming 41
up with, or assisting workers in assembly lines, especially 42
in automotive and aerospace industry. For instance a new 43
manipulator arm structure is presented in [2] consisting of a 44
mixture of SCARA manipulator and a parallelogram struc- 45
ture that allows the operator to move inside its workspace and 46
handle very heavy loads with an accuracy of few millimeters. 47
In [1], a mobile robotic assistant vis-à-vis human assistant is 48
evaluated in terms of performance for H–R collaboration in 49
fetch-and-deliver tasks. In the automotive industry a slow- 50
moving robot is reported to have been introduced, which 51
collaborates in proximity with a human worker to insulate 52
and water-seal vehicle doors [3]. Furthermore, a two-armed 53
collaborative manufacturing robot has been designed and 54
produced that automatically adapts to changes in its environ- 55
ment, such as obstacles, accidental contacts, dropped objects, 56
or variable conveyor speeds. It can work close to workers 57
without the need of safety cages, since it contains sensors 58
123
Journal: 12008 MS: 0259 TYPESET DISK LE CP Disp.:2015/2/2 Pages: 15 Layout: Large
Au
tho
r P
ro
of

unco
rrec
ted
pro
of
Int J Interact Des Manuf
and Artificial Intelligence software that enable it to “see”59
objects, “feel” feedback forces and “understand” tasks [4].60
In a different application realm, it seems that collabora-61
tive robots are destined to provide help, offer personalized62
services and generally improve quality of life to the elderly,63
e.g. ASTRO [5] and the Giraff [6] robots. However, safety64
concerns keep human–robot (H–R) collaboration in industry65
still under-exploited, despite its seemingly offering a good66
balance between productivity, quality, flexibility and initial67
as well as running cost. For a long time now, safety of the68
human interacting with industrial robots is addressed by seg-69
regation between humans and robots in space and/or in time.70
The most critical safety aspects are the moving robot arm71
and the perceptibility of arm movements [7]. Modern safety72
techniques in H–R collaboration integrate infra-red light cur-73
tains, robotic vision with cameras, emergency-stop buttons74
and alarms, structured either in a stop-and-go fashion, or to75
slow down the robot movements. Yet, most of the above tech-76
niques usually stop the entire production when used in pro-77
duction lines and not in smaller cells. Collaborative robots are78
developing so quickly that international standards are having79
trouble to keep up. Although the International Organization80
for Standardization (ISO) has revised the ISO 10218 standard81
Part II, which allows cooperation of robot with personnel, it82
has yet to work out safety standards for collaborative robots,83
such as how much force a robot can safely apply to different84
parts of a human worker’s body [8,9].85
However, no matter how safe (physically) collaborative86
robots are, they may not be welcomed by human workers. To87
assure acceptability of such a collaboration between humans88
and robots, all important physical and “mental” safety issues89
that arise must be successfully dealt with. Physical safety90
means that the robot does not physically injure humans. Men-91
tal safety, on the other hand, can be defined as the enhanced92
users’ vigilance and awareness of the robot motion, that will93
not cause any unpleasantness such as fear, shock or surprise94
[9,10].95
Recent H–R interaction studies have shown that a fluent96
collaboration (beyond stop-and-go interaction type) requires97
awareness and anticipation of intention by both human and98
robotic agents [11]. Situation awareness can be defined as99
“the perception of the elements in the environment within100
a volume of time and space, the comprehension of their101
meaning and the projection of their status in the near future”102
[12]. To enable and facilitate this awareness and anticipation,103
it is important that both humans and robots communicate104
their status, location and intent, either explicitly through cer-105
tain cues such as audio/visual signals or implicitly via their106
actions and motion paths [1]. Serious games and highly inter-107
active and immersive Virtual, Augmented or Mixed Real-108
ity training applications are preferentially deployed in such109
cases, since they can provide enhanced training in all three110
levels of situation awareness (perception, comprehension and 111
projection). 112
In terms of functionality, Virtual Reality (VR) allows users 113
to be extracted from physical reality in order to virtually 114
change time, space, and (or) interaction type [13]. There- 115
fore, the three main features of VR are: Interaction, Immer- 116
sion and Imagination. Virtual Reality-based Training Sys- 117
tems (VRTSs) are advanced computer-assisted, interactive 118
training systems using VR technology, e.g. allowing trainees 119
to properly test and operate new equipment before it is actu- 120
ally installed [14]. VRTSs typically provide trainees impor- 121
tant perceptual cues and multi-modal feedback (e.g., visual, 122
auditory, and haptic), enabling effective transfer of virtu- 123
ally acquired knowledge to real-world operation skills. The 124
significance of VR in manufacturing training and in H–R 125
collaboration is widely pointed out in the literature, indica- 126
tively [14–18]. Furthermore, VRTSs need to have the neces- 127
sary physical fidelity to mimic the resolution of the physical 128
world in order to be effective for tasks that are characterized 129
by a significant perceptual and/or motor component [19]. 130
All VRTSs can be decomposed into three distinct functional 131
parts: (i) input devices for interaction, such as sensors, track- 132
ers, mice (ii) output devices (mainly for immersion, such as 133
Head Mounted Displays, large 3D displays and force feed- 134
back arms), and (iii) a VR engine including data and models 135
that constitute the virtual scene, interaction models, and a 136
graphical representation of the user (avatar) [20]. 137
This paper presents a highly interactive and immersive 138
VRTS (“beWare of the Robot”) in terms of a serious game 139
that simulates in real-time the cooperation between industrial 140
robotic manipulators and humans, executing simple manu- 141
facturing tasks. The scenario presented includes collabora- 142
tive handling in tape-laying for building aerospace compos- 143
ite parts. Safety issues, such as contacts and collisions are 144
mainly tackled through “emergencies”, i.e. warning signals 145
in terms of visual stimuli and sound alarms. Mental safety is 146
of upmost priority and the approach followed is that warning 147
stimuli inside a VRTS that offers immersion and real-time 148
interaction can provide to the user augmented situational 149
awareness and enhanced perception of the robot’s motion. 150
The short-term goal of the research is to investigate users’ 151
enhanced experience and behaviour inside the virtual world, 152
while cooperating with a robot, whilst the overall long-term 153
goal is to investigate the acceptability of H–R collaboration 154
and enhance the relevant terms by means of such an environ- 155
ment. 156
In Sect. 2, related work on VEs for H–R Collaboration is 157
presented. Sect. 3 provides an overview of the system and 158
details of the VE, whilst Sect. 4 explains implementation- 159
specifics relating to interaction techniques and the 3D user 160
interfaces for tracking and interaction. Preliminary findings 161
concerning user’s experience are presented and briefly dis- 162
123
Journal: 12008 MS: 0259 TYPESET DISK LE CP Disp.:2015/2/2 Pages: 15 Layout: Large
Au
tho
r P
ro
of

unco
rrec
ted
pro
of
Int J Interact Des Manuf
cussed in Sect. 5. Finally, in Sect. 6, conclusions and future163
work are summarized.164
2 Related work165
In the literature, a deictic mode of sensory-motor control with166
symbolic gestures and a Virtual Research Head Mounted Dis-167
play (HMD) for teleoperation and teleassistance, was first168
proposed in [21], that can be useful for H–R interaction and169
control. Morioka and Sakakibara [22] developed a new cell170
production assembly system, in which physical and informa-171
tion supports are provided to the human operators to increase172
productivity. A human and a mobile robot cooperate in a173
shared workspace without stopping with the use of vision174
and speed restriction techniques. Krüger et al. [23] gives a175
survey about H–R cooperation in assembly, safety systems,176
and all available technologies that support the cooperation.177
Giesler et al. [24] presented an Augmented Reality (AR)-178
based approach wherein human and robot mostly share skills179
rather than physically collaborate. Corrales et al. [25] present180
the implementation of real-time proximity queries between181
humans and robotic manipulators, used by safety strategies182
/ algorithms for avoiding collisions. From another point of183
view, Arai et al. [26] deal with mental strains and stress of184
human operators in H–R cell production systems and pro-185
pose metrics (distance, speed) for a physiologically comfort-186
able collaboration, concluding that to reduce mental strains187
human operators need to be notified of robot motions before188
they happen. Charoenseange and Tonggoed [27] present an189
implementation of H–R collaboration in shared workspace190
for virtual assembly tasks, using AR techniques to provide191
necessary information to the human operator. An AR inter-192
face for interactive robot path planning is also shown in [28].193
Several H–R interaction methods and a Euclidean distance-194
based method are implemented, to assist the user in path195
planning, within the AR environment. In [17], a H–R collabo-196
ration experiment is conducted in an immersive Virtual Envi-197
ronment (CAVE), to evaluate the latter with respect to real-198
world applications. A markerless interface and a KinectTM-199
based interaction method that allows a human operator to200
communicate his movements to a dual robotic manipulator201
during an object manipulation task is presented in [29]. Wang202
et al. [30] report a novel, vision-guided method of real-time203
active collision avoidance for H–R collaboration in an aug-204
mented environment, where the system can alert the operator,205
stop or modify the robot’s trajectory away from an approach-206
ing operator. Qiu et al. [31] propose a real-time driving model207
for personalized Virtual Human modeling, and integrate the208
complete model into a VR environment for interactive assem-209
bly. Zaeh and Roesel [32] present a safety-based smart H–R210
system, which perceives its environment with multiple sen-211
sors and integrates a robot with reactive behavior and an oper-212
ator. Neuhoefer et al. [33] developed an immersive VR/AR 213
simulation system for H–R cooperation, with a virtual robot 214
and real-time physics simulation capabilities. Usability eval- 215
uation between the AR and the VR configuration showed 216
users’ preference towards the former. Weistroffer et al. [34] 217
presented an immersive VR simulating environment to study 218
how people perceive robots during collaboration tasks, as 219
well as the acceptability of H–R collaboration. To summa- 220
rize, a large number of authors have thoroughly tackled H–R 221
collaboration safety aspects, as well as tools and methods for 222
safe collaboration. Many authors have also studied VR or AR 223
environments for teleoperation and teleassistance. Very few 224
studies focus on mental safety issues and acceptance of H–R 225
collaboration using immersive and interactive VR systems. 226
3 VRTS overview 227
In this section, the tools, models and techniques exploited in 228
building the “beWare of the Robot” application are described. 229
System setup and configuration are presented in detail, as 230
well as user tracking and navigation issues. Special emphasis 231
is given to the interaction techniques used to facilitate virtual 232
H–R collaboration implementation. 233
3.1 Use case 234
A use case scenario was developed, representing H–R collab- 235
orative tape laying for building aerospace fabric reinforced 236
composite parts. Conventional tape laying typically involves 237
carbon fiber reinforcement in the form of profiled fabric lay- 238
ers (patches/cloths) being stacked manually by an operator 239
inside a die successively, one on top of the other, until the 240
desired thickness is reached. In the H–R collaborative sce- 241
nario, the robotic manipulator is assigned the picking and the 242
transfer of the patches towards the human. Once the user takes 243
the patch from the robot and places it in the right position 244
inside the metallic die located in front of him, the robot pro- 245
ceeds to feed the next patch. The process is repeated until all 246
different patches are properly placed in the die by the human, 247
hereby represented by the avatar’s hands. These direct H–R 248
collaborative tasks are kept as simple as possible, but they 249
involve close proximity between human and robot and they 250
are performed in parallel, as a “hand-to-hand” collabora- 251
tive manipulation scenario. The latter was selected to rep- 252
resent typical “hand-to-hand” H–R collaborative manufac- 253
turing scenarios, to ensure further exploitation in the future. 254
The robot arm is attached upside-down to a metallic struc- 255
ture next to the user and the workbench on which the die lies, 256
see Fig. 1. The robotic arm takes a carbon patch (cloth) from 257
a workbench on which the patches are stacked, and handles 258
it towards the user. When the robot moves, the user is capa- 259
ble of both virtually seeing and hearing it. In addition, the 260
123
Journal: 12008 MS: 0259 TYPESET DISK LE CP Disp.:2015/2/2 Pages: 15 Layout: Large
Au
tho
r P
ro
of

unco
rrec
ted
pro
of
Int J Interact Des Manuf
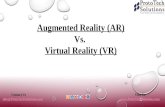
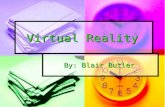
Fig. 1 The shop-floor
environment and the main VE
components as seen from a third
person shooter inside Unity
3dTM
robot’s work envelope is always visible by the user as a semi-261
transparent, red, toroidal type surface. The latter is an exact262
representation of the real robot workspace, and its projection263
on the floor is also depicted in Fig. 1. When the user enters264
the robot’s workspace, the red surface is blinking and a sound265
alarm is turned on, to warn the user of the robot’s proximity266
and a possible collision. The use of these visual and audio267
warning stimuli might be argued to be imprecise or unrealis-268
tic and even to compromise physical fidelity, however such269
exaggerated triggers can prove very effective for tasks that270
are characterized by a significant perceptual component [19],271
and can provide the user enhanced situational awareness and272
alertness of a potentially hazardous workspace [35]. More-273
over, according to Bowman et al. [36], 3D user interfaces274
should deliver only as much realism as is needed for the par-275
ticular application.276
3.2 System setup and configuration277
“BeWare of the robot” VRTS is a standalone build devel-278
oped on the Unity 3dTM game engine platform that can279
run on a typical PC with WindowsTM operating system.280
The system platform consists of: the “beWare of the robot”281
application, a PC running Windows XPTM equipped with an282
nVidia QuadroTM FX1700 graphics card, an eMagin Z800283
3DVisorTM HMD with stereo ear buds, a Microsoft KinectTM284
sensor, keyboard and mouse. Furthermore, in order to be able285
to reproduce what the user sees through the HMD and to286
record the user with a video camera, a projector is normally287
used, cloning the displays of the HMD on a wall behind the288
user. KinectTM sensor and headtracker (input) data are trans-289
mitted to the PC over USB cables. Communication between290
Unity 3dTM and the KinectTM sensor is implemented with the291
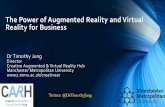
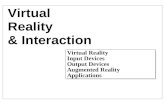
OpenNI framework. Figure 2 shows a diagram of the system292
and data flow between its main components.293
Shop-floor environment and its components were devel- 294
oped using RhinocerosTM and 3ds MaxTM software, for 3D 295
part design, mesh creation and editing, and avatar’s biped 296
design. The skinned model of the avatar was created online 297
in the Evolver website [37]. 3D parts and models are exported 298
in “.fbx” file format for increased compatibility with Unity 299
3dTM software. Unity 3dTM game engine was used for assem- 300
bly, rendering, lighting, shading, physics and collision mod- 301
elling, simulation, programming and building the compila- 302
tion. 303
The VRTS incorporates (i) the assembly of original 3d 304
models forming the virtual model of a composites hand lay- 305
out work-cell, (ii) the model of a StäubliTM RX90L robotic 306
manipulator, (iii) the skinned model of an avatar with a biped 307
attached to it, (iv) real-time data exchange with the tracking 308
devices, (v) interaction scripts in C# and Unity’s JavaScript 309
mainly concerning collision and ray-casting, child/parenting 310
functions and skeletal tracking of avatar joints, (vi) real-time 311
shadows, rendering and lighting, and (vii) image, video and 312
audio textures from real working spaces. The virtual scene 313
of the shop-floor, its main components 3d models and the 314
avatar are depicted in Fig. 1. 315
3.3 The virtual scene—simulating environment 316
During execution and testing of the “beWare of the robot” 317
application, the user is asked to wear the HMD and to stand 318
straight at a distance of 2–3 m towards the KinectTM sensor. 319
The VE is rendered in real time in frame-sequential stereo- 320
scopic vision in the HMD, and a monoscopic duplicate of it 321
is shown typically through a wall projector behind the user. 322
When the system starts the user sees the initial screen of the 323
VE and a calibration prompt, see Fig. 3. 324
Calibration of the user against the avatar skeleton is 325
achieved by the user raising hands with both elbows bent at 326
123
Journal: 12008 MS: 0259 TYPESET DISK LE CP Disp.:2015/2/2 Pages: 15 Layout: Large
Au
tho
r P
ro
of

unco
rrec
ted
pro
of
Int J Interact Des Manuf
Fig. 2 System setup
Fig. 3 The initial view of the VE as seen from the user (first person
shooter/egocentric view)
90◦ thereby standing in “Y” posture towards the Kinect sen-327
sor, see Fig. 4a. After calibrating, users are usually allowed328
some time to familiarise themselves with system’s tracking,329
navigating and travelling capabilities and to explore the dif-330
ferent objects of the VE as well as interaction with them.331
When the user moves or turns in real space, the avatar’s body332
and the virtual viewpoint change accordingly. When the user333
walks around in the real space, the avatar follows the same334
path in the VE, though with some spatial restrictions and lim-335
its, defined by the HMD cables length and the sensor tracking336
range. When the user turns his head, the avatar’s head and337
the first person camera attached to it respond accordingly.338
The user can also collide or interact with rigid bodies in the339
virtual scene, bend his body in every direction, move his340
hands and handle selected objects, see Fig. 5, noting that 341
the clone of the VE projected on the background wall was 342
for the benefit of the researchers. Stereoscopic vision offered 343
by the HMD, combined with body and head tracking capa- 344
bilities, provide the user an enhanced feeling of immersion 345
and involvement. Moreover, immersion and presence feel- 346
ings are enriched with 3d sound sources, i.e. robot motion 347
sound, alarm, shop-floor sounds, real-time shadows, and the 348
video of a real manufacturing work-cell which is reproduced 349
on the background wall, in form of a video texture, see Fig. 1. 350
Once immersed in the virtual scene and familiarized with 351
navigation and tracking, the user has to push a green button, 352
located on the workbench, to start the training, see Fig. 4b. 353
Apart from the green (start) button, a red, emergency stop but- 354
ton is also located on the workbench. When the user pushes 355
the green start button, a collision is detected between the cap- 356
sule colliders of the avatar hands and the sphere collider that 357
envelops the button. Colliders are invisible components of the 358
Unity physics library, defining the shape of an object for the 359
purpose of physical collisions, elaborated on further in Sect. 360
4.2 below. This collision makes the robotic arm start mov- 361
ing from its default position towards the workbench with the 362
carbon cloths (patches) stacked in the desired order. When 363
the robot’s end-effector approaches the first patch in the right 364
distance and orientation, their ray-casting colliders interact 365
with each-other and the end-effector becomes parent of the 366
cloth, i.e. the cloth is virtually attached to it and follows its 367
movements. The robot then moves again and hands the patch 368
over to the user (avatar) with the proper orientation. 369
123
Journal: 12008 MS: 0259 TYPESET DISK LE CP Disp.:2015/2/2 Pages: 15 Layout: Large
Au
tho
r P
ro
of

unco
rrec
ted
pro
of
Int J Interact Des Manuf
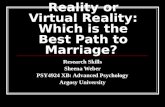
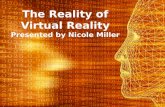
Fig. 4 A storyboard visualising the different tasks of the use-case scenario
At the same time, the user has to approach the robotic370
arm, see Fig. 4c, preferably with only one arm extended, and371
take the patch from the end-effector, minding not to collide372
with the robot’s body. A ray-casting collider is attached to373
the avatar’s index fingers, allowing the user to take the patch374
from the robot, when the fingers touch the patch, see Fig. 4d.375
The avatar fingers are now parents of the patch. If the user376
enters the robot’s workspace when trying to grab the patch,377
the red surface representing the workspace starts flashing and378
an alarm sound is turned on, to warn the user to be aware of379
the robot’s proximity and of a potential hazard.380
Afterwards, the user has to move towards the workbench 381
where the metallic die lies and place the cloth on the high- 382
lighted (rendered with red color) surface of the die, see 383
Fig. 4e. The appropriate, different part of the die is high- 384
lighted, depending on the patch being handled, in order to 385
guide the user as to the position, boundary and orientation of 386
the patch. 387
The patch is not released from the avatar’s hand until it is 388
properly placed in the indicated area of the die. After that it 389
is released (destroyed) and appears laid in its final position 390
on the die, see Fig. 4f–n. Thereafter, the robotic arm moves 391
123
Journal: 12008 MS: 0259 TYPESET DISK LE CP Disp.:2015/2/2 Pages: 15 Layout: Large
Au
tho
r P
ro
of

unco
rrec
ted
pro
of
Int J Interact Des Manuf
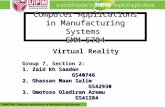
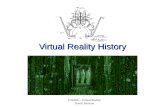
Fig. 5 Hands tracking example-avatar’s hands following the user’s arm movements (left), and avatar’s hand moving a patch and placing it onto
the red-coloured surface of the die (right)
again to the workbench with the carbon cloths, in order to392
fetch the next patch to the user. This process is repeated until393
all different patches are properly placed in the die (Fig. 4o)394
and there are no patches left on the workbench.395
The completion of the above tasks, including calibration,396
for four different patches normally takes about 6-8 minutes.397
A graphical representation of the system activities workflow398
is given in the UML activity diagram in Fig. 6. In the latter,399
task-sharing between the user, the tracker and the robot is400
presented in three vertical swim-lanes respectively.401
3.4 Avatar402
An avatar is very seldom used in H–R collaboration appli-403
cations reported in literature irrespective of how immersive404
or interactive the latter are. Most of them use either a fixed405
camera, or a simple first person shooter to abstractly simu-406
late the user’s vision and navigation. Aiming at a more fluent407
and realistic collaboration between the user and the robot, it408
was decided to involve a skinned and fully functional male409
avatar model. The inclusion of a realistic and functional vir-410
tual body may enhance the sense of presence, which in turn411
has a positive effect on spatial knowledge acquisition and412
usage [36,38]. Furthermore, Usoh et al. [38] showed the413
importance of user association with the virtual body, Thus,414
a highly detailed avatar was created consisting of 11,000415
polygons. In addition, when the user is looking down, or is416
simply facing his arms, he can see a realistic representation417
of his tracked virtual hands and arms. This is considered to418
be essential for the sense of presence in such a first-person419
shooter application, where the user is wearing a HMD and420
the real world is completely blocked from his view.421
The avatar shown in Fig. 7 was created as a textured mesh422
model, with a custom face (clone) and a body animation rig.423
A biped was attached to the avatar mesh model, making it424
kinematically functional, i.e. the different body parts mesh,425
the skin and cloth textures follow the biped’s kinematics. The 426
representation of the avatar object in Unity game engine has 427
a straightforward tree hierarchy, with the mesh model as a 428
parent and 3D Transforms ordered as children according to 429
the biped’s kinematic chain. 430
The main camera is attached to the avatar’s head as a child 431
of the head transform, at eye height and with ±60◦ field of 432
view about the local vertical axis. A first person shooter is 433
created in this way, offering to the user the perspective of 434
the avatar, and a view of his hands, if combined with head 435
and body tracking. The first person perspective was preferred 436
to the third person perspective because it arguably offers an 437
augmented presence, realism and immersion feeling; every 438
action taking place in the VE can be experienced by the user 439
as if performed by him/her. 440
A capsule collider bounds the avatar’s torso and two 441
smaller capsule colliders are attached to its hands. The col- 442
liders are used by the physics engine of Unity game engine 443
for collision detection and for event triggering as explained 444
in Sect. 3.3. Rigid body physics is also added in the avatar’s 445
hands, head and torso. The 11 avatar tracking points (Unity 446
Transforms) that are used for skeletal tracking of the user are 447
depicted in Fig. 7 on the right. 448
3.5 Robot 449
The industrial robot manipulator arm used in the H–R col- 450
laboration scenario is a StäubliTM RX 90L with six rotational 451
joints. It can lift objects with a maximum weight of 12 kg 452
and a maximum reach of 1185 mm. The virtual robot end 453
effector is a simplified vacuum based custom design for fast 454
handling of the lightweight carbon patches. 455
The virtual robot arm is suspended from a structure next to 456
the workbench, so that it can easily collaborate with the user, 457
as shown in Fig. 8. The robot object in Unity has a straightfor- 458
ward tree hierarchy, allowing proper robot motion according 459
123
Journal: 12008 MS: 0259 TYPESET DISK LE CP Disp.:2015/2/2 Pages: 15 Layout: Large
Au
tho
r P
ro
of

unco
rrec
ted
pro
of
Int J Interact Des Manuf
Fig. 6 UML activity diagram for the system workflow
to robot open kinematic chain, starting from the base joint460
(J1) being just a parent and successively moving to the last461
one (J6) being just a child. In the VRTS, the robotic arm is462
controlled by forward kinematics scripts only, i.e. joint val-463
ues are only used to control the robot motion and determined464
position and orientation of the end-effector.465
A combination of mesh and primitive-shape colliders466
is used in the robot structure to increase execution speed;467
primitive-shape colliders such as box, sphere or capsule col-468
liders are faster in collision detection calculations, compared469
to complex mesh colliders. Capsule colliders are attached to470
the base, the arm and the forearm of the robot, and box collid-471
ers to the shoulder and the elbow. In the end-effector, though,472
where extra accuracy is needed to avoid false-collisions with473
the avatar’s hand, a mesh collider was preferred.474
The robot work envelope is depicted as a penetrable, semi- 475
transparent toroidal-like surface form, an exact copy of the 476
real robot workspace, with a mesh collider and the alarm 477
audio source attached to it. 478
4 Implementation 479
4.1 Unity VR engine 480
Unity is a platform for game creation including a game 481
engine and an Integrated Development Environment (IDE). 482
All the necessary resources (models, textures, sounds etc.) 483
are imported in a Unity project as assets, which are included 484
in GameObjects (classes) [39]. Components and scripts are 485
123
Journal: 12008 MS: 0259 TYPESET DISK LE CP Disp.:2015/2/2 Pages: 15 Layout: Large
Au
tho
r P
ro
of

unco
rrec
ted
pro
of
Int J Interact Des Manuf
Fig. 7 The skinned avatar
inside the VE with the capsule
collider attached to its left hand
(middle), and, the 11 skeletal
tracking points in the avatar’s
biped (right)
Fig. 8 The robotic arm and the different colliders attached to it
then attached to GameObjects to control their behaviour.486
Components, or combination of components, usually add487
functionality to GameObjects, and they can be transforms,488
cameras, colliders, particles, rays, rigid bodies, audio sources489
etc.490
Scripts are essential elements of every VR application,491
and they are treated by the game engine as original com-492
ponents, written by the developer. Scripts can be used to493
respond to inputs, trigger events or wait for events to run,494
or even to create special physical or kinematical behaviours.495
Three programming languages are supported in Unity: (i) C#,496
(ii) UnityScript which is modelled after JavaScript, and, (iii)497
Boo, a language similar to Python. All original scripts devel-498
oped for the “beWare of the Robot” application are written499
in C#. Two functions are defined inside every class in Unity500
scripts: (i) the Start function, which is called once by Unity,501
before the play mode begins, and where all properties are set502
to their initial values, and, (ii) the Update function, which 503
is handled during the frame update in play mode, and which 504
usually includes movements, actions triggering, responses to 505
user actions, and whatever needs to be handled over time. 506
A very useful Unity asset type is the Prefab. Prefabs are 507
instances of a GameObject, cloning the complete original one 508
with its components and its properties. Any changes made 509
to a prefab are immediately applied to all its instances. The 510
advantage of Prefabs is that they are re-usable and they can be 511
easily instantiated or destroyed throughout the runtime, with 512
a few lines of code. In the scenario implemented composite 513
patches creation, selection and placement are implemented 514
with prefabs. 515
Transforms are the essential kinematic components in 516
Unity; transforms are the equivalent components to 3D 517
frames of other VR engines. Every GameObject has a trans- 518
form attached to it, determining its position, rotation and 519
scaling, relatively to the transform’s parent. 520
4.2 Interaction techniques 521
In VR, an interaction technique is a means or a method 522
including both hardware (I/O devices) and software com- 523
ponents for accomplishing the desired interaction task, via a 524
user interface (e.g. manipulating, moving, selecting etc) [36]. 525
The most preferable, successful and tried-and-true interac- 526
tion techniques attempt to simulate, or adapt from, the real, 527
physical world, referring to real behavioural schemes. If these 528
schemes are difficult to implement, 3D interaction metaphors 529
can prove very effective [13]. Such metaphors or a combi- 530
nation of them, form the fundamental mental model of a 531
technique, a symbolic image and a perceptual manifestation 532
of what users can do by using these techniques [36]. 533
123
Journal: 12008 MS: 0259 TYPESET DISK LE CP Disp.:2015/2/2 Pages: 15 Layout: Large
Au
tho
r P
ro
of

unco
rrec
ted
pro
of
Int J Interact Des Manuf
The typical generic interaction tasks in VEs are the fol-534
lowing: (i) selection, (ii) manipulation, (iii) navigation (travel535
and way-finding), and, (iv) system control [36]. All of the536
above tasks are performed during the runtime of ‘BeWare537
of the Robot’ application, and they are accomplished with538
the use of a wide variety of natural interaction techniques539
(schemes). No metaphors or “magic” (i.e. overcoming human540
or real world limitations) techniques are employed. Many of541
the techniques used for some tasks are used in combina-542
tion with interaction techniques for other tasks not directly543
related to them (cross-task techniques), e.g. the ray-casting544
technique is used for selection and for system control, or, the545
direct virtual hand technique is used for manipulation and546
activation of controls.547
Ray-casting and collision-based pointing techniques are548
used for selection, and direct-virtual-hand, real hand ges-549
tures, collision, and child/parenting techniques are used for550
manipulation. a A ray casting script is attached to the avatar’s551
index fingers and the robot end-effector, which casts a small,552
invisible ray in a specific direction against all colliders, and553
returns a true Boolean value when the object with the desired554
tag is hit. If this value is true during H–R collaboration, the555
cloth is attached to the avatar’s hand, i.e. it becomes a child556
of the hand’s transform. According to the parenting tech-557
nique, the child inherits the movement and rotation of its558
parent. Although there are two interfering rays hitting the559
patch (when the user tries to grab the patch from the robot),560
the user is favoured because the ray cast from the avatar’s561
fingers is longer than the ray cast from the end-effector. The562
user then has to properly position and lay the cloth on the red-563
coloured area of the die. This task is accomplished in the VE564
with a combination of interaction techniques. First, the box565
collider of the patch collides with the red-coloured part of566
the die and a trigger event is sent destroying the patch object;567
the patch thus appears released from the avatar’s hand. At the568
same time, a prefab of the laid patch, which was not visible569
before, is instantiated and rendered, appearing as if it were570
automatically placed, laid and shaped in its final position of571
the die.572
Collision detection and triggering is the main interaction573
technique, and it is mostly implemented using sphere, box574
and cylinder covering techniques. The use of primitive shape575
colliders (or combination of them) is preferred to the use of576
complex mesh colliders, for increased execution speed and577
for maintaining a steady frame rate. During typical tests run-578
time, a steady frame rate, greater than 25 frames per second is579
obtained, which balances affordability and quality. Collision580
detection can be used either for solid object collision behav-581
iour, and thus, initiate rigid body physics actions (onCollisio-582
nEnter function), or just as a trigger event (onTriggerEnter583
function) that allows other colliders to pass through, and sim-584
ply triggers an event or calls another function. For example,585
when a game object tagged as “avatar” collides with the trig-586
Fig. 9 The visual alarm is enabled (flashing), warning the user that
he/she has entered the robot workspace
ger mesh collider of the robot workspace, the OnTriggerEnter 587
function enables the audio alarm to start playing, and makes 588
the renderer of the robot workspace start flashing, see Fig. 9. 589
Navigation and travel are implemented with simple phys- 590
ical motions and (real) walking techniques, since head and 591
body tracking is used. Navigation techniques based on track- 592
ing and walking are natural and instinctive, allowing there- 593
fore the user to carry out other, more important tasks without 594
being distracted even by thinking about how to move around. 595
Another advantage is that the hands are not used at all for 596
navigation, thus being entirely free to be devoted to the pur- 597
poses for which they are used in reality. In addition, walking 598
technique provides to the user vestibular cues that help him 599
understand the size of the environment [36]. However, walk- 600
ing is not always feasible due to real space limitations; in the 601
current case real walking is nevertheless an appropriate and 602
effective technique, as the size of the active working envi- 603
ronment is equal to the range of the Kinect tracker, and the 604
cabling length of the I/O devices allows freedom of move- 605
ment in the tracked area. 606
The system control task is crucial since it allows the user to 607
control the interaction flow between other tasks of the appli- 608
cation; a command is issued to request the system to perform 609
a function, or to change the system state. In this case, neither 610
Graphical User Interfaces (GUIs: buttons, menus etc), nor 611
physical tools are used for system control. The main tech- 612
nique used is the tracking-driven virtual hand that interacts 613
(selects, manipulates) with specific objects, and that in turn 614
triggers an event or a change in the system state/interaction 615
mode. For example, when the user’s virtual hand interacts 616
with the green button, e.g. the user walks to, points with his 617
hand to, approaches and finally touches/collides with it, a 618
function is triggered that moves the robotic arm and makes 619
it fetch the first patch. Similarly, patch selection, grabbing, 620
placement and release, call a function and change the system 621
state or request it to perform an action (parenting, render, 622
change colour etc). However, some conventional system con- 623
123
Journal: 12008 MS: 0259 TYPESET DISK LE CP Disp.:2015/2/2 Pages: 15 Layout: Large
Au
tho
r P
ro
of

unco
rrec
ted
pro
of
Int J Interact Des Manuf
trol techniques are also used, such as the postural commands624
technique during the calibration process. Finally, mouse and625
keyboard are still used, but for minor system control tasks,626
such as the exit-on-escape-button function, which terminates627
the application, and parameter value typing in the settings628
window at the beginning of the application.629
4.3 3D user interfaces for interaction and tracking630
3D User Interfaces (UIs) involve 3D interaction, in which631
user tasks are performed directly in a 3D spatial context [36].632
In “beWare of the Robot” application, two main 3D UIs are633
employed: an eMagin Z800 3DVisor HMD and a Microsoft634
KinectTM sensor.635
The HMD is used as an output device for visual display,636
stereoscopic vision and 3D sound, and as an input device for637
head motion tracking. The Kinect sensor is used as an input638
device for skeletal tracking and positioning of the user.639
The Z800 HMD uses two OLED microdisplays to accom-640
plish the stereoscopic effect, when a frame-sequential 3D sig-641
nal is transmitted by the graphics card. Although the Z800642
HMD has three integrated gyroscopes and accelerometers to643
detect head motion along the X, Y and Z axis, HMD head644
tracking is limited to the head’s pitch angle, i.e. head turn-645
ing up or down (vertical head tracking) in the range ±60◦.646
Data from the other two gyroscopes are not exploited, since647
a tracking conflict arose between the tracking data of the648
Kinect on the one hand, and the data of the HMD gyroscope649
on the other hand. More specifically, the conflict was caused650
by the simultaneous horizontal tracking of the head (yaw651
rotation angle) by the HMD, and of the horizontal skeletal652
tracking of the shoulders and the neck by the Kinect sen-653
sor; for example, the avatar (camera) exhibits intensely and654
irregular trembling when the shoulders turn in one direction655
and the head turns in the opposite direction, thus making the656
immersion experience unbearable. This is the reason for not657
using the Kinect tracking data of the upper body (head and658
neck joints).659
The HMD headtracker, which comes bundled with a660
mouse-emulating software, translates the detected motion661
into smooth and accurate mouse motion on the screen. Spe-662
cialized settings in the bundled software and the character663
controller settings in Unity are also used to fine-tune mouse664
emulation. In Unity VR engine, the main camera is attached665
to the head transform, which is child of the character con-666
troller and the avatar. A “Mouse Look” script is attached to667
the main camera, mapping the mouse translational move to668
rotational move of the camera.669
3D skeletal tracking and positioning using Microsoft670
KinectTM is conducted by continuous processing of RGB671
and depth images of the user [29], captured by the sensor672
that is fixed in front of him. The sensor contains two cam-673
eras (one infrared and one standard video camera) and an674
infrared projector that produces a grid of dots (structured IR 675
light at 830 nm) that measure the distance of objects from the 676
Kinect, and compose a “depth map” of the image [40]. The 677
output images are downsampled and transmitted to the host 678
device via the USB cable, at a frame rate of 9–30 Hz. Kinect 679
software takes the computed depth map and infers body posi- 680
tion using machine learning and “known skeletons”, thereby 681
transforming the body parts image into a skeleton. 682
The OpenNI framework was chosen as the middleware for 683
Kinect, both for skeletal tracking, as well as a basic driver. 684
Tracking data of twenty body joints were available. How- 685
ever, data corresponding to just eleven of the joints were 686
sufficient and were therefore matched to the correspondent 687
biped control points, see Fig. 7. In particular, head, neck and 688
lower leg tracking, including feet, is not carried out. As men- 689
tioned above, head tracking is performed by the HMD. In 690
addition, the absence of neck, leg and feet tracking by the 691
KinectTM sensor does not affect the overall tracking qual- 692
ity or the immersion feeling in such a first person shooter 693
application, since the overall response of the biped to the 694
movements of the tracked joints was accurate enough. On 695
the contrary, it was noticed that lack of feet tracking made 696
the avatar’s movement smoother and steadier in the vertical 697
direction. When the user looks down he/she could see his/her 698
tracked virtual hands and arms, and probably the untracked 699
feet. However, given the fact that the feet are always oriented 700
in the hips direction, feet tracking absence is not noticeable 701
and was not described by any user as a distraction. 702
As far as Kinect’sTM tracking limitations and problems 703
are concerned, observations in [35] revealed that almost half 704
of the users sometimes “lost control” of their hands, even 705
instantaneously. That is because experiment tasks required 706
user body rotation towards the sensor, and at the extremes 707
hands tracking is confusing: KinectTM sensor cannot easily 708
distinguish the left from the right hand. In addition when 709
users turn their body more than 90◦ to the Kinect sensor 710
axis, skeletal tracking is sometimes lost, and avatar remains 711
“frozen” for a while in the last detected posture, although the 712
user may continue moving. 713
5 User experience and discussion 714
In interactive VEs, the human user becomes a real partici- 715
pant in the virtual world, interacting and manipulating virtual 716
objects. Human performance in training VEs highly depends 717
on the degree of presence that the user experiences, i.e. the 718
subjective experience of being in one place or environment 719
even when one is situated in another. Indeed, presence is the 720
most important measure for situation awareness in an inter- 721
active VE [41]. Prothero et al. [42] claim that “presence” 722
and “situation awareness” are overlapping constructs. It is 723
generally agreed that the two necessary conditions to expe- 724
rience presence are immersion and involvement. This work 725
123
Journal: 12008 MS: 0259 TYPESET DISK LE CP Disp.:2015/2/2 Pages: 15 Layout: Large
Au
tho
r P
ro
of

unco
rrec
ted
pro
of
Int J Interact Des Manuf
Table 1 Test results (SD: strongly disagree, D: strongly agree, N: neutral, A: agree, SA: strongly agree)
Question SD D N A SA
I feel like I was really moving in the scene 0 1 3 5 21
Wearing the HMD I feel present and involved in the virtual activity 2 1 5 15 7
I lost my concentration, even instantaneously, during the experiment 28 0 0 2 0
Wearing the HMD I feel immerged in the virtual environment 1 0 7 13 9
I feel like I was really moving an object with my hand, despite the fact that
the object did not have physical mass
1 7 8 12 2
I did not easily perceive the red transparent surface that represented the robot
workspace
29 0 0 0 1
Audiovisual stimuli (alarms) helped me being aware of a potentially
hazardous workspace
0 1 1 8 20
I did not encounter any difficulties during the initial calibration process with
the Kinect sensor
0 3 3 6 18
I feel like the avatar followed my body and head movements precisely 1 2 12 14 1
It was easy to take the patches form the robot’s end-effector 0 0 9 13 8
It was easy to navigate/move in the virtual world (ease of movement, restraint) 0 3 12 12 3
I feel like my behavior in the virtual world didn’t change, compared to my
behavior in the real world
3 10 9 8 0
I feel more like I was participating in an amusing game 0 2 5 10 13
After the experiment I went through, I believe that H–R training tasks can be
more attractive with the use of “serious games”
1 0 2 8 19
focuses more on “presence by involvement” [43], i.e. both726
involvement and immersion are thought to be necessary for727
experiencing presence.728
BeWare of the Robot was tested by a group of 30 pre-729
final year mechanical engineering students and the detailed730
findings are published in [35]. A summary of the main results731
is shown in Table 1.732
The results revealed that the system scored great in “pres-733
ence by involvement” and in navigation issues; a vast major-734
ity of subjects were feeling as if they were really moving in735
the scene, “involved and present” in the virtual activity, with-736
out losing their concentration at all during the test. It was also737
found that participants felt immerged in the VE when wear-738
ing the HMD and a large number of them felt as if they were739
really manipulating an object with their hands, despite the740
fact that the object did not have physical mass.741
During the H–R collaboration procedure almost all sub-742
jects answered that they easily perceived the red transparent743
surface that represented the robot’s workspace, and 70 % of744
subjects managed to complete the H–R collaborative tasks745
without entering into the workspace (which was the poten-746
tially hazardous area). Most of the subjects (93 %) favourably747
accepted the use of visual and auditory stimuli (alarms) for748
the robot’s workspace awareness. Note that, as already men-749
tioned in Sect. 3.1, the employment of the red surface (robot750
workspace) and of the visual and audio warning stimuli might751
seem contradictory with fidelity and realism of VEs, but752
realism and level-of-detail are not always the ultimate goal.753
In VRTSs learning procedure for example, exaggeration or 754
deformation of real events is “authorized” for understanding 755
complex situation [44], for enhancing situation awareness 756
[36], and for alerting in a potentially hazardous workspace 757
[35]. 758
Concerning usability and tracking quality, very few sub- 759
jects reported encountering any difficulties during the initial 760
detection and calibration process by the Kinect sensor. Most 761
of the participants considered that the avatar was following 762
their (tracked) movements precisely. On the other hand, 43 % 763
of the subjects felt that their movements were altered com- 764
pared with the real ones, and 23 % of them pointed out a slight 765
“vibration” in the avatar’s hands movements. Nevertheless, 766
70 % of the subjects answered that they easily managed to 767
pick-up the cloth patches from the robot’s end-effector, while 768
the majority said that it was easy to navigate (travel) in the 769
virtual world. 770
According to [38] immersion requires that there is a 771
match between the user’s proprioceptive feedback about 772
body movements and the information generated on the dis- 773
plays of the HMD. This is obviously favoured by a detailed 774
body mapping. In this work, where tracking is implemented 775
seamlessly, contactlessly, and without time delay, the consis- 776
tency between proprioceptive information and sensory feed- 777
back is high. 778
As to user motivation, 76 % of the participants replied that 779
during the experiment they were feeling more as if they were 780
participating in an amusing game, and 90 % of the subjects 781
123
Journal: 12008 MS: 0259 TYPESET DISK LE CP Disp.:2015/2/2 Pages: 15 Layout: Large
Au
tho
r P
ro
of

unco
rrec
ted
pro
of
Int J Interact Des Manuf
believe that training tasks requiring H–R collaboration can be782
more attractive with the use of interactive “serious games”.783
Eventually, the results suggest a positive prospect for the784
use of VR for training on H–R collaboration. Users experi-785
ence a high level of involvement and immersion, and there-786
fore, presence. The inclusion of a realistic avatar, that is the787
user’s own kinematic representation, strengthens the sense788
of presence. Stereoscopic vision combined with the body789
and head tracking capabilities provide the user an enhanced790
immersion feeling and have a positive effect on spatial knowl-791
edge. Moreover, first-person perspective was preferred to792
the third-person perspective, because it offers an augmented793
presence feeling; every action taking place in the VE can be794
experienced by the user as if performed by him/her. In addi-795
tion, moving around the scene and using real gestures (skele-796
tal tracking) to manipulate objects and to complete the tasks797
makes learning more active and impressive for learners than798
conventional, non-interactive training methods. Ultimately,799
the more control the user has in interacting with the VE and800
over the system, the higher his/her experience of presence801
and awareness, and the greater the success of the VRTS.802
6 Conclusion and future work803
A novel interactive VRTS named “beWare of the robot” has804
been presented, in terms of a serious game for H–R collabora-805
tion. This short-term aim of the research was to construct this806
system as a platform for experimentation. Thus, this paper807
presented an extended overview of the system, functional808
details of the Virtual Environment, interaction techniques and809
tools used, as well as 3D user interfaces for interaction, and810
especially for tracking.811
The medium-term aim of the research concerns the accept-812
ability of H–R collaboration, in regard to safety issues that813
arise during the execution of collaborative manufacturing814
tasks in a shared workspace. To establish the acceptability of815
the collaboration, mental safety issues, i.e. human’s aware-816
ness and vigilance of the moving robot, have to be tack-817
led. The line adopted in this work is that immersive serious818
games simulating H–R collaboration are the most pertinent819
tool to facilitate situation awareness, since they can provide820
enhanced training at all three levels of situation awareness821
(perception, comprehension and projection).822
H–R collaborative tape-laying for composite parts was823
implemented as a relatively simple use case, in which the824
virtual world includes a shop floor environment, an industrial825
robot and an avatar, a metallic die, carbon fibre patches, and826
several auxiliary machine shop objects. Both the VE model827
and the training scenario were designed to have the necessary828
fidelity and to be as close as possible to reality.829
What distinguishes this work is primarily the wide “blend-830
ing” of different interaction techniques that were used. More831
than 25 original scripts were deployed to accomplish all kinds 832
of interaction tasks: selection, manipulation, navigation, and, 833
system control. The main interaction techniques that were 834
used are: ray-casting, collision detection, child/parenting, 835
tracking-driven virtual hand, and, real walking technique. 836
Using markerless body and head tracking, human-system 837
interaction is natural, replicating real and inherent move- 838
ments. A second novelty of this work is the simultaneous 839
employment of the KinectTM sensor together with the HMD, 840
for skeletal and head tracking respectively. The HMD is 841
used as an output device for 3D visual display and as an 842
input device for head tracking. Head-tracking quality and 843
presence feeling are therefore higher, because by using one 844
device for both activities, the data generated on the output 845
displays correspond precisely to the input tracking data, and 846
the match between proprioception and sensory feedback is 847
considerable. A further novelty is the inclusion of a high qual- 848
ity avatar with the first person shooter, allowing the user to 849
observe his/her tracked hands, and to experience any activ- 850
ity as if it was really performed by him. This first-person 851
enhanced interactive experience is difficult, or even danger- 852
ous to be naturally performed in the real world involving a 853
real robot. Consequently, the VRTS can be seen as a tool to 854
obtain knowledge, and transferring (returning) this knowl- 855
edge back to the real world. 856
Overall, testing results are positive and suggest a good 857
prospect in the use of such applications for H–R collabora- 858
tion simulation or acceptability testing. It would be difficult 859
to claim, of course, that results can be generically applicable 860
to all aspects of H–R collaboration; the findings however sug- 861
gest that the immersive experience combined with warning 862
stimuli, can help the user to experience the feel of presence 863
as a situation awareness phenomenon, which is, eventually, 864
the intent of the research. 865
The long term-aim of the research is to consider task-based 866
or even safety-based robot motion programming according 867
to situation awareness and anticipation of intention by both 868
human and robot. For instance, the human could wait for 869
the robot to finish its task, move away or move with cau- 870
tion, or finally perform an alternative task. Conversely, the 871
robot would change its posture, work on another possible 872
task (patch), slow down or move with priority to a specific 873
joint. 874
Concerning tracking quality and experience newer I/O 875
devices would be considered, such as the KinectTM for Xbox 876
One sensor for tracking, the Leap MotionTM device for pre- 877
cise hand/finger tracking as well as immersion devices offer- 878
ing wider field of view and extensive headtracking (e.g. the 879
Oculus RiftTM). 880
Acknowledgments This research has been co-financed by the Euro- 881
pean Union (European Social Fund—ESF) and Greek national funds 882
through the Operational Program “Education and Lifelong Learning” of 883
123
Journal: 12008 MS: 0259 TYPESET DISK LE CP Disp.:2015/2/2 Pages: 15 Layout: Large
Au
tho
r P
ro
of

unco
rrec
ted
pro
of
Int J Interact Des Manuf
the National Strategic Reference Framework (NSRF)—Research Fund-884
ing Program: Heracleitus II. Investing in knowledge society through the885
European Social Fund. The authors would also like to thank Dimitrios886
Batras, MSc, for his generous help in programming, his motivation and887
his helpful comments during the development of the application.888
References889
1. Unhelkar, V.V., Siu, H.C., Shah, J.A.: Comparative performance890
of human and mobile robotic assistants in collaborative fetch-891
and-deliver tasks. In: Proc. 2014 ACM/IEEE Int. Conf. Human–892
robot Interact—HRI ’14, pp. 82–89 (2014). doi:10.1145/2559636.893
2559655894
2. de Santos, P.G., Garcia, E., Sarria, J., Ponticelli, R., Reviejo, J.: A895
new manipulator structure for power-assist devices. Ind. Robot. An.896
Int. J. 37(5), 452–458 (2010). doi:10.1108/01439911011063272897
3. Knight, W.: Smart Robots Can Now Work Right Next to Auto898
Workers. http://goo.gl/EUbRNX (2013). Accessed 22 April 2014899
4. Rethink robotics: baxter robot overview. http://goo.gl/fRUqou900
(2014). Accessed 22 April 2014901
5. Coradeschi, S., Cesta, A., Cortellessa, G., Coraci, L., Gonzalez, J.,902
Karlsson, L., Furfari, F., Loutfi, A., Orlandini, A., Palumbo, F., Pec-903
ora, F., von Rump, S., Stimec, A., Ullberg, J., Otslund, B.: Giraff-904
Plus: combining social interaction and long term monitoring for905
promoting independent living, 2013. In: 6th Int. Conf. Hum. Syst.906
Interact, pp. 578–585 (2013). doi:10.1109/HSI.2013.6577883907
6. Cavallo, F., Aquilano, M., Bonaccorsi, M., Mannari, I., Carrozza,908
M.C., Dario, P.: Multidisciplinary approach for developing a new909
robotic system for domiciliary assistance to elderly people. In:910
Annu. Int. Conf. IEEE Eng. Med. Biol. Soc. IEEE Eng. Med. Biol.911
Soc. Annu. Conf., pp. 5327–5330 (2011). doi:10.1109/HSI.2013.912
6577883913
7. Helander, M.G.: Ergonomics and safety considerations in the914
design of robotics workplaces: a review and some priorities for915
research. Int. J. Ind. Ergon. 6(2), 127–149 (1990). doi:10.1016/916
0169-8141(90)90018-W917
8. Working with robots: our friends electric. http://goo.gl/v8DhAK918
(2013). Accessed 22 April 2014919
9. Ogorodnikova, O.: Human robot interaction? The safety challenge920
(an integrated frame work for human safety). PhD dissertation,921
Budapest University of Technology and Economics, Faculty of922
Mechanical Engineering, Budapest (2010)923
10. Alami, R., Bicchi, A., Bischoff, R., Chatila, R., De Luca, A., De924
Santis, A.: Safe and dependable physical human–robot interaction925
in anthropic domains? State of the art and challenges. In: Bicchi,926
A., De Luca, A. (ed.) Procceedings IROS Workshop on pHRI—927
Physical Human–Robot Interaction in Anthropic Domains (2006)928
11. Hoffman, G., Breazeal, C.: Effects of anticipatory action on human-929
robot teamwork efficiency, fluency, and perception of team. Pro-930
ceeding ACM/IEEE Int. Conf. Human-robot Interact. - HRI ’07.931
1–8 (2007). doi:10.1145/1228716.1228718932
12. Wickens, C.D.: Situation awareness: review of Mica Ends-933
ley’s 1995 articles on situation awareness theory and mea-934
surement. Hum. Factors. 50(3), 397–403 (2008). doi:10.1518/935
001872008X288420936
13. Fuchs, P., Moreau, G., Moreau, G., Burkhardt, J.-M., Coquillart, S.:937
Le traité de la réalité virtuelle, vol. 2. L’interfaçage, l’immersion et938
l’interaction en environnement virtuel. Les Presses de l’Ecole des939
Mines de Paris, Paris (2006)940
14. Lin, F., Ye, L., Duffy, V., Su, C.-J.: Developing virtual environments941
for industrial training. Inf. Sci. (Ny) 140(1—-2), 153–170 (2002).942
doi:10.1016/S0020-0255(01)00185-2943
15. Shukla, C., Vazquez, M., Frank Chen, F.: Virtual manufacturing: an 944
overview. Comput. Ind. Eng. 31(1–2), 79–82 (1996). doi:10.1016/ 945
0360-8352(96)00083-6 946
16. Burdea, G., Coiffet, P.: Virtual Reality Technology, 2nd edn. Wiley- 947
Interscience, New York (2003) 948
17. Duguleana, M., Barbuceanu, F.G., Mogan, G.: Virtual and mixed 949
reality—new trends. In: Shumaker, R. (ed.) Virtual and mixed 950
reality—new trends. Springer, Berlin, pp. 164–173 (2011). doi:10. 951
1007/978-3-642-22021-0_19 952
18. Zhu, J., Ong, S.K., Nee, A.Y.C.: A context-aware augmented reality 953
system to assist the maintenance operators. Int. J. Interact. Des. 954
Manuf. (2014). doi:10.1007/s12008-013-0199-7 955
19. Nathanael, D., Vosniakos, G.-C., Mosialos, S.: Cognitive task 956
analysis for virtual reality training. In: Proceedings of the 28th 957
Annual European Conference on Cognitive Ergonomics—ECCE 958
’10. ACM Press, New York, p. 241 (2010). doi:10.1145/1962300. 959
1962350 960
20. Burkhardt, J.-M., Bardy, B., Lourdeaux, D.: Immersion, Réalisme 961
et Présence dans la conception et l ’ évaluation des Environnements 962
Virtuels. Psychol. Française. 48(2), 35–42 (2003) 963
21. Pook, P.K., Ballard, D.H.: Deictic human/robot interac- 964
tion. Rob. Auton. Syst. 18, 259–269 (1996). doi:10.1016/ 965
0921-8890(95)00080-1 966
22. Morioka, M., Sakakibara, S.: A new cell production assembly sys- 967
tem with human–robot cooperation. CIRP Ann. Manuf. Technol. 968
59, 9–12 (2010). doi:10.1016/j.cirp.2010.03.044 969
23. Krüger, J., Lien, T.K., Verl, A.: Cooperation of human and 970
machines in assembly lines. CIRP Ann. Manuf. Technol. 58, 628– 971
646 (2009). doi:10.1016/j.cirp.2009.09.009 972
24. Giesler, B., Steinhaus, P., Walther, M., Dillmann, R.: Sharing skills: 973
using augmented reality for human–robot collaboration. In: Woods, 974
A.J., Merritt, J.O., Benton, S.A., Bolas, M.T. (eds.) Proc. SPIE 975
5291, Stereoscopic Displays and Virtual Reality Systems XI, pp. 976
446–453 (2004). doi:10.1117/12.526689 977
25. Corrales, Ja, Candelas, Fa, Torres, F.: Safe human–robot inter- 978
action based on dynamic sphere-swept line bounding volumes. 979
Robot. Comput. Integr. Manuf. 27(1), 177–185 (2011). doi:10. 980
1016/j.rcim.2010.07.005 981
26. Arai, T., Kato, R., Fujita, M.: Assessment of operator stress induced 982
by robot collaboration in assembly. CIRP Ann. Manuf. Technol. 983
59(1), 5–8 (2010). doi:10.1016/j.cirp.2010.03.043 984
27. Charoenseang, S., Tonggoed, T.: Human–robot collaboration with 985
augmented reality. In: Stephanidis, C. (ed.) HCI International 986
2011—Posters’ Extended Abstracts. Springer, Berlin, pp. 93–97 987
(2011). doi:10.1007/978-3-642-22095-1_19 988
28. Fang, H.C., Ong, S.K., Nee, A.Y.C.: A novel augmented reality- 989
based interface for robot path planning. Int. J. Interact. Des. Manuf. 990
8(1), 33–42 (2014). doi:10.1007/s12008-013-0191-2 991
29. Du, G., Zhang, P.: Markerless human–robot interface for dual robot 992
manipulators using Kinect sensor. Robot. Comput. Integr. Manuf. 993
30(2), 150–159 (2014). doi:10.1016/j.rcim.2013.09.003 994
30. Wang, L., Schmidt, B., Nee, A.Y.C.: Vision-guided active collision 995
avoidance for human–robot collaborations. Manuf. Lett. 1(1), 5–8 996
(2013). doi:10.1016/j.mfglet.2013.08.001 997
31. Qiu, S., Fan, X., Wu, D., He, Q., Zhou, D.: Virtual human modeling 998
for interactive assembly and disassembly operation in virtual reality 999
environment. Int. J. Adv. Manuf. Technol. 69(9–12), 2355–2372 1000
(2013). doi:10.1007/s00170-013-5207-3 1001
32. Zaeh, M., Roesel, W.: Safety aspects in a human–robot interaction 1002
scenario: a human worker is co-operating with an industrial robot. 1003
In: Kim, J.-H., et al. (eds.) Progress in robotics. Springer, Berlin, 1004
pp. 53–62 (2009). doi:10.1007/978-3-642-03986-7_7 1005
33. Neuhoefer, J.A., Bernhard, K., Schlick, C.M.: Embedded aug- 1006
mented reality training system for dynamic human–robot coop- 1007
eration. NATO RTO-MP-HFM-169. RTO Human Factors and 1008
123
Journal: 12008 MS: 0259 TYPESET DISK LE CP Disp.:2015/2/2 Pages: 15 Layout: Large
Au
tho
r P
ro
of

unco
rrec
ted
pro
of
Int J Interact Des Manuf
Medicine Panel (HFM) Workshop, RDECOM, pp. 1–14, Orlando,1009
Florida, USA (2009)1010
34. Weistroffer, V., Paljic, A., Callebert, L., Fuchs, P.: A methodology1011
to assess the acceptability of human-robot collaboration using vir-1012
tual reality. In: Proceedings of the 19th ACM Symposium on Virtual1013
Reality Software and Technology—VRST ’13. ACM Press, New1014
York, p. 39 (2013). doi:10.1145/2503713.25037261015
35. Matsas, E., Batras, D., Vosniakos, G.: Beware of the robot: a1016
highly interactive and immersive virtual reality training applica-1017
tion in robotic manufacturing systems. In: Emmanouilidis, C.,1018
Taisch, M., Kiritsis, D. (eds.) Advances in Production Manage-1019
ment Systems. Competitive Manufacturing for Innovative Products1020
and Services. Springer, Berlin, pp. 606–613 (2013). doi:10.1007/1021
978-3-642-40352-1_761022
36. Bowman, D.A., Kruijff, E., LaViola, J.J., Poupyrev, I.: 3D User1023
Interfaces: Theory and Practice. Addison Wesley Longman Pub-1024
lishing Co., Inc, Redwood City (2004)1025
37. Evolver 3D digital avatar website. www.evolver.com. Accessed 231026
January 20121027
38. Usoh, M., Arthur, K., Whitton, M.C., Bastos, R., Steed, A., Slater,1028
M., Brooks, F.P.: Walking, walking-in-place, flying, in virtual1029
environments. In: Proc. 26th Annu. Conf. Comput. Graph. Inter-1030
act. Tech.—SIGGRAPH ’99, pp. 359–364 (1999). doi:10.1145/1031
311535.3115891032
39. Unity online manual. http://goo.gl/kH1Hv8. Accessed 25 July 1033
2014 1034
40. Miles, R.: Start here! Learn microsoft kinect API. O’Reilly Media 1035
Inc, Sebastopol (2012) 1036
41. Vora, J., Nair, S., Gramopadhye, A.K., Duchowski, A.T., Melloy, 1037
B.J., Kanki, B.: Using virtual reality technology for aircraft visual 1038
inspection training: presence and comparison studies. Appl. Ergon. 1039
33(6), 559–70 (2002). doi:10.1145/311535.311589 1040
42. Prothero, J.D., Parker, D.E., Furness III, T.A., Wells, M.J.: Towards 1041
a robust, quantitative measure for presence. In: Garland, D.J., End- 1042
sley, M.R. (eds.) Conference on Experimental Analysis and Mea- 1043
surement of Situational Awareness. Embry-Riddle Aeronautical 1044
University Press, Daytona Beach, pp. 359–366 (1995) 1045
43. Schuemie, M.J., van der Straaten, P., Krijn, M., van der Mast, C.A.: 1046
Research on presence in virtual reality: a survey. Cyberpsychol. 1047
Behav. 4(2), 183–201 (2001). doi:10.1089/109493101300117884 1048
44. Burkhardt, J.-M., Lourdeaux, D., Fuchs, P.: Conception d’un sys- 1049
tème de RV pour la formation des agents de conduite aux opérations 1050
en milieu ferroviaire. In: Richards, A., Grumbach, N. (eds.) Col- 1051
loque Réalité Virtuelle et Cognition, pp. 123–132. ENST Paris, 1052
France (1999) 1053
123
Journal: 12008 MS: 0259 TYPESET DISK LE CP Disp.:2015/2/2 Pages: 15 Layout: Large
Au
tho
r P
ro
of
View publication statsView publication stats