Design and Testing of a Rotary Wing MAV with an Active Structure for Stability and Contro
11
Design and Testing of a Rotary Wing MAV with an Active Structure for Stability and Control Paul Samuel Asst. Research Scientist [email protected] Jayant Sirohi Asst. Research Scientist [email protected] Felipe Bohorquez Grad. Research Asst. [email protected] Ronald Couch Grad. Research Asst. [email protected] Alfred Gessow Rotorcraft Center Department of Aerospace Engineering University of Maryland College Park, MD 20742-3015 Abstract The design and testing of a rotary wing Micro Aerial Vehicle (MAV) using an active, flexible structure for stability and control is discussed in this paper. The vehicle configuration consists of a set of coaxial, counter-rotating rotors independently driven by two coaxial electric motors. Multi-functional structures are used as the primary structural components with the ultimate goal of vehicle weight minimization. Light-weight carbon fiber composite beams comprise the MAV structure. The inherent flexibility of the structure enables the realization of a rotor system with marginal passive stability and minimal complexity. Thin, lightweight shape memory alloy (SMA) wires are incorporated in the structure. The wires serve as lateral control actuators as well as a portion of the structural support. Structural vibration is mitigated through the integration of constrained viscoelastic damping material into the composite structural elements. In addition, power is provided to the upper electric motor through conduits integrated into the composite structural elements. A lithium polymer battery pack is used to power the vehicle and serves as the structural support for the electronics and sensors. Preliminary tests show that the SMA actuator has a bandwidth of approximately 1 Hz and can provide sufficient authority for lateral control. Introduction For many years, there has been much interest in the development of very small flying vehicles, referred to as Micro Aerial Vehicles (MAVs), for sensory applications such as covert imaging, biological and chemical agent detection, and urban intelligence gathering. One of the earliest examples was a mechanical dragonfly with an integrated listening device developed by the CIA in the 1970s. 1 A common requirement of many of the missions envisioned for MAVs is the ability both to loiter for long periods of time and to effectively maneuver in confined spaces. Since 1999, the Alfred Gessow Rotorcraft Center at the University of Maryland has focused on the devel- opment of rotary-wing MAVs. The first vehicle resulting from this effort was MICOR (MIcro Presented at the AHS 61st Annual Forum, Grapevine, TX, 1-3 June 2005. Copyright c 2005 by AHS International, Inc. All rights reserved. COaxial Rotorcraft). 2, 3 MICOR has two counter- rotating rotors arranged in a coaxial configu- ration, with each rotor driven by an independent electric motor. Since the development of the first prototype, MICOR has been significantly refined. 4 Most recently, an innovative swashplate was added to the vehicle for lateral control. This research has demonstrated the effectiveness of the coaxial configuration for rotary-wing MAVs. The original MICOR prototype was powered by three Tadiran LIMnO2 3V batteries. This vehicle could hover for approximately four minutes and had a negligible payload capacity. At the time, the large current flow (about 3A) required by the electronics and motors exceeded the batteries capabilities, which were designed to provide a maximum continuous current of 1 A. When forced to discharge at higher current levels, their effective energy density was reduced, shortening the flying time. Since then, battery technology
description
Alfred Gessow Rotorcraft Center Department of Aerospace Engineering University of Maryland College Park, MD 20742-3015 Ronald Couch Grad. Research Asst. [email protected] Jayant Sirohi Asst. Research Scientist [email protected] Felipe Bohorquez Grad. Research Asst. [email protected] Presented at the AHS 61st Annual Forum, Grapevine, TX, 1-3 June 2005. Copyright c 2005 by AHS International, Inc. All rights reserved.
Transcript of Design and Testing of a Rotary Wing MAV with an Active Structure for Stability and Contro

Design and Testing of a Rotary Wing MAV with an ActiveStructure for Stability and Control
Paul SamuelAsst. Research Scientist
Jayant SirohiAsst. Research [email protected]
Felipe BohorquezGrad. Research [email protected]
Ronald CouchGrad. Research [email protected]
Alfred Gessow Rotorcraft CenterDepartment of Aerospace Engineering
University of MarylandCollege Park, MD 20742-3015
Abstract
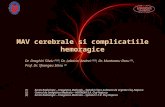
The design and testing of a rotary wing Micro Aerial Vehicle (MAV) using an active, flexiblestructure for stability and control is discussed in this paper. The vehicle configuration consistsof a set of coaxial, counter-rotating rotors independently driven by two coaxial electric motors.Multi-functional structures are used as the primary structural components with the ultimate goalof vehicle weight minimization. Light-weight carbon fiber composite beams comprise the MAVstructure. The inherent flexibility of the structure enables the realization of a rotor system withmarginal passive stability and minimal complexity. Thin, lightweight shape memory alloy (SMA)wires are incorporated in the structure. The wires serve as lateral control actuators as well asa portion of the structural support. Structural vibration is mitigated through the integration ofconstrained viscoelastic damping material into the composite structural elements. In addition,power is provided to the upper electric motor through conduits integrated into the compositestructural elements. A lithium polymer battery pack is used to power the vehicle and serves as thestructural support for the electronics and sensors. Preliminary tests show that the SMA actuatorhas a bandwidth of approximately 1 Hz and can provide sufficient authority for lateral control.
Introduction
For many years, there has been much interestin the development of very small flying vehicles,referred to as Micro Aerial Vehicles (MAVs),for sensory applications such as covert imaging,biological and chemical agent detection, andurban intelligence gathering. One of the earliestexamples was a mechanical dragonfly with anintegrated listening device developed by the CIAin the 1970s.1 A common requirement of many ofthe missions envisioned for MAVs is the abilityboth to loiter for long periods of time and toeffectively maneuver in confined spaces. Since1999, the Alfred Gessow Rotorcraft Center at theUniversity of Maryland has focused on the devel-opment of rotary-wing MAVs. The first vehicleresulting from this effort was MICOR (MIcro
Presented at the AHS 61st Annual Forum, Grapevine, TX,1-3 June 2005. Copyright c© 2005 by AHS International,Inc. All rights reserved.
COaxial Rotorcraft).2,3 MICOR has two counter-rotating rotors arranged in a coaxial configu-ration, with each rotor driven by an independentelectric motor. Since the development of thefirst prototype, MICOR has been significantlyrefined.4 Most recently, an innovative swashplatewas added to the vehicle for lateral control. Thisresearch has demonstrated the effectiveness of thecoaxial configuration for rotary-wing MAVs.
The original MICOR prototype was powered bythree Tadiran LIMnO2 3V batteries. This vehiclecould hover for approximately four minutes andhad a negligible payload capacity. At the time,the large current flow (about 3A) required bythe electronics and motors exceeded the batteriescapabilities, which were designed to provide amaximum continuous current of 1 A. Whenforced to discharge at higher current levels, theireffective energy density was reduced, shorteningthe flying time. Since then, battery technology

Flexible Structure
Coaxial Counter-Rotating Rotor System
Electronics Supported by Li-Poly Battery Pack
Electric Motors with Integrated
Gearboxes
Flexible Central Support
Figure 1. Flexible MAV.
has improved significantly, in particular with theadvent of lithium polymer (Li-Poly) batteries.These batteries have a high energy density andcan handle the large current flow required to flyMICOR. However, even the most advanced Li-Poly batteries do not provide the power requiredto achieve a sufficient mission duration. Thus,the operating efficiency of the vehicle must beimproved.
Great strides have been made in the efficiencyof lift generation of the rotor. The figure ofmerit (FOM) of the original MICOR rotor wasapproximately 0.42.2 A comprehensive aerody-namic investigation was subsequently performedwhich suggested a number of changes to thedesign of the rotor blades. These advance-ments have enabled the current MICOR rotorto reach a FOM of approximately 0.64.5 Theserotor and battery improvements have lead toan estimated hover endurance of 20 minuteswith an estimated payload capacity of 20 grams,
which is approaching the level necessary forpractical application. However, improvements arestill necessary in order to further increase theendurance and payload capacity of the vehicle.
One potential area of improvement is the vehicleweight. A reduction in vehicle weight leads toan increase in payload capacity or an increasein endurance due to a reduction in the powerrequired to hover. The incorporation of multi-functional structures is an effective technique forminimizing the weight of an MAV by reducingthe structural weigh fraction of the vehicle. Inaddition, minimizing the power drawn by othervehicle systems such as control actuators leads toan increase in endurance.
The focus of the current research is the devel-opment of a rotary-wing MAV that uses an active,flexible structure to achieve stability and control.The inherent flexibility of the support structureis expected to enable the vehicle to demon-

strate marginal passive stability, minimizing thework done and thus the power drawn by thecontrol system actuators. Weight minimization isachieved by making the flexible structure activethrough the use of integrated Shape MemoryAlloy (SMA) wires. The SMA wires provide bothactuation and a portion of the structural supportfor the vehicle. In addition, a Li-Poly batterypack powers the vehicle and is used as the supportstructure for the MAV electronics and sensors,further decreasing the structural weight fractionof the vehicle.
Configuration
The design of a hovering MAV is driven bythe desire for efficient operation resulting in amaximum flight duration. Efficient operationis achieved through efficient rotor design,weight minimization, and actuator workloadreduction. Concurrent research at the Universityof Maryland has lead to the development ofefficient rotors for a coaxial MAV.4,5 The rotorsystem used for this vehicle is based on this work.
Weight reduction is achieved through theincorporation of multi-functional structures.Multi-functional structures are necessary vehiclesystems that are designed to serve as structuralcomponents. For the current research, thebattery and the actuators are multi-functional.In order for the structural supports to doubleas actuators, a vehicle architecture had to bedeveloped that would allow small changes inthe shape of the structure to be used as controlinputs. The resulting MAV developed in thisresearch is shown in figure 1.
The rotors and motors are mounted coaxially.The previous work on MICOR2,3 has shownthat the coaxial rotor configuration is effectivefor rotary-wing MAVs from the perspective ofboth stability and controllability. The motorsare supported by four flexible members, eachwith integrated SMA wires (the SMAs are notshown in figure 1). Thus, each flexible memberserves as a control actuator. The flexible centralsupport structure, shown in figure 2, is keptin tension by the 4 members and serves tokeep the motors appropriately aligned. Thecentral support consists of a section of cableprotected by silicon tube and is attached at eachend by a bearing mounted in each rotor hub.The bearings allow the rotors to counter-rotatewithout twisting the central support.
Central Support
Shaft
Integrated Bearings
Figure 2. Central Support Structure.
Teeter Stops
Blade Root Clamps
Teeter Hinge
Carbon Blades
Stabilizer Bar
Integrated Bearing
Gearbox
Figure 3. Rotor Hub.
Each rotor consists of two blades and a stabilizerbar. The rotational inertia of the stabilizer barminimizes any change in the tip path plane of therotor that may be caused by small perturbationsin the orientation of the vehicle. The weights atthe tip of the stabilizer bar increase the rotationalinertia of the bar and are shaped to minimizedrag. Each rotor is free to teeter about the axisof the stabilizer bars. However, teeter-stops havebeen incorporated to ensure that the rotor doesnot collide with the structure. The rotor hub isshown in figure 3. As stated above, an efficientrotor blade design resulting from the work on

Actuator
Gravity
Thrust
Actuator
Figure 4. Vehicle Schematic.
MICOR4,5 has been incorporated.
The Li-Poly battery pack powers the vehicle andserves as a structural support for the vehicleelectronics and payload. Currently, in addition tothe battery pack, the vehicle electronics consistof a six-channel receiver, a yaw gyro, two motorspeed controllers and four small SMA controlboards that interpret the receiver signals andregulate the voltage sent to the SMA actuatorsaccordingly.
Currently, the complete vehicle weight withoutpayload is estimated to be 118 grams. Forcomparison, MICOR currently weighs 135grams.5 However, certain components have notcurrently been optimized for weight and thusfurther weight reduction is possible.
Structural Flexibility
In order to develop a flexible structure thatenables passive stability and to determine theappropriate location of the SMA wires for control,the appropriate deformation for a desired rotorresponse must first be determined. Considerthe schematic of the vehicle with two in-planeactuators, given in figure 4.
Kinematic Representation
A kinematic diagram of the vehicle can be used tomore clearly understand the vehicle deformation.Consider the simple kinematic diagram presentedin figure 5. Only internal forces have been
Rotor Planes
Center Line
Motor
CentralShaft
Motor
Tensile Force
Motor Separation Distance
Tensile Force
Figure 5. Basic Kinematic Diagram.
included. The central support is assumed to berigid and pinned at each end. Both motors havea sliding pin at the base and a pinned joint at theconnection to the central shaft. The compositebeams are bent and attached to the base of eachmotor thus applying the tensile force indicated inthe figure. The tensile force serves to keep thestructure aligned acting against any rotation atthe pinned joints as this rotation, herein referredto as motor tilt, decreases the motor separationdistance. Hence, the tensile force can be replacedby relatively soft torsional springs located at thepinned joints between the central shaft and themotors, as indicated in figure 6.
The composite structural support beams arerigidly attached to the base of each motor, perpen-dicular to the motor axis of rotation. In additionto reducing the motor separation distance, motortilt causes a deformation, effectively a localbending, of the composite beams. The beamsresist this local bending more strongly than thanthey resist a decrease in motor separation distancefor a given degree of motor tilt. This effect isrepresented by a relatively stiff torsional springplaced at the base of each motor, as indicated infigure 7.
Control Actuation
Directional control is achieved by tilting the planeof both rotors toward the desired direction ofmotion. Thus, deformation as shown in figure 8

Motor
Soft TorsionalSprings
Motor
Motor Separation Distance
Rotor Planes
Center Line
Figure 6. Modified Kinematic Diagram.
Stiff TorsionalSpring
Center Line
Actuator
Actuator
Soft TorsionalSpringsRotor Planes
Stiff TorsionalSpring
Figure 7. Improved Kinematic Diagram.
must be imposed by the actuators. Note that themoments are applied directly to the stiff torsionalsprings and thus only the soft torsional springsresist the deformation. In addition, it should bementioned that since the rotor blades are free toteeter, only the planes of the stabilizer bars aredirectly affected. The deformation changes thecollective pitch of the rotors in a cyclic mannersuch that the collective pitch of each advancingblade is at a minimum and the collective pitchof each retreating blade is at a maximum perpen-dicular to the plane of actuation. This causes each
ActuationMoment
ActuationMoment
Rotor Planes
Center Line
Figure 8. Kinematic Diagram with ActuationMoments Imposed.
rotor plane to tilt in the desired direction.
Based on this kinematic analysis, an analyticalmodel is under development that should aid infurther refinement of the vehicle structure. Theproperties of the current support structure arebeing determined for inclusion in the model. It isanticipated that actuation of the SMA wires willlead to an increase in the stiffness of the structuralsupports, effectively increasing the stiffness of thetorsional springs during actuation. However, ithas not yet been determined whether the changein stiffness is non-negligible.
Passive Stability
Passive stability is achieved by allowing the rotorto react to small perturbations in the orientationof the vehicle such that any change in the tip pathplane of the rotor is minimized. The flexibilityof the support structure acts as a virtual teeterhinge for the stabilizer bar and is represented inthe model by pinned joints at the bottom andtop of each motor. This virtual hinge allows therotational inertia of the stabilizer bar to keepthe tip-path-plane of the rotor steady when smallexternal disturbances change the orientation ofthe vehicle.
Often, the requirements for hover stability andmaneuverability conflict, particularly when thevehicle is designed to be passively stable. Passivestability is particulary desirable for MAVs as

power is at a premium and thus the power usedby an active stability system could significantlydiminish the flight duration of the vehicle. Themotor/rotor system is designed to take advantageof the inherent flexibility of the structure inorder to achieve marginal stability. However, thestability of the vehicle is dependent upon theflexibility of the structure. As mentioned above,actuation of the SMAs is expected to stiffenthe structure, potentially changing (reducing) thepassive stability of the vehicle and improvingcontrollability and maneuverability.
Vibration Mitigation
One problem inherent to flexible structures isvibration. Initial vehicle testing demonstratedthat the structure was extremely sensitive to rotorvibration. For a real system, the rotor willalways cause some degree of vibration since itcan never have perfect track and balance. Hence,the structure must be designed to tolerate thisvibration.
Two modifications were made in order to mitigatethe effect of vibration. First, the stiffness ofthe structure was changed such that the naturalfrequency of the structure would not coalesce withthe excitation frequency of the rotor during hover.However, changes in the rotational velocity of therotors are used to control altitude and yaw. Thus,ensuring that the rotor excitation frequency willnot coalesce with the natural frequency of thestructure over the entire operational envelope ofthe vehicle is nearly impossible.
To further mitigate vibration, a second modifi-cation was made. A constrained layer ofviscoelastic polymer damping material wasintegrated into each composite beam. Eachsupport structure is comprised of a 10 mil layerof viscoelastic polymer sandwiched between twolayers of carbon fiber. The sandwich structure isshown in figure 9.
After the modifications were implemented on thevehicle, additional tests were performed. Thesetests demonstrated that the modifications hadthe desired effect and the structure sufficientlydamped over the operational envelope.
Lateral Control
As stated above, four actuators are incor-porated into the vehicle, spaced 90 degrees
Carbon Fiber Beams
10 mil Viscoelastic
Polymer
Figure 9. Viscoelastic Sandwich Structure.
apart about the rotational axis of the rotors.Actuation is achieved through the use of thin,light-weight SMA wires mounted on the beamsurface. These wires offer a relatively large forceand displacement while providing an operationalbandwidth sufficient for stability and control.
SMA Properties
Shape Memory Alloys (SMAs) belong to a class ofmaterials that have the ability to ‘memorize’ theirshape at a low temperature.6 Strains impartedto the material at a low temperature can berecovered when the material is exposed to asufficiently elevated temperature. On subsequentcooling, the material does not undergo any furtherchange in geometry. This phenomenon is knownas the Shape Memory Effect (SME).7,8
A widely known material that exhibits the SME isNitinol, which is an alloy of Nickel and Titanium.A large number of actuators based on Nitinolare commercially available.9 Nitinol is mostcommonly available in the form of thin wires. Itis typically capable of recovering strains on theorder of 6-8%. The thermal activation of thewires can be conveniently achieved by passinga current through the wire and making use ofthe self-heating of the wire. These propertiesmake it attractive for use as a simple, lightweight,high stroke force generator in MAV applications.Typical Nitinol properties are summarized inTable 1.
The basic phenomenon responsible for the shapememory effect is a thermally activated phasetransformation.10 At high temperatures, thematerial exists in the austenite phase. On cooling,the austenite phase transforms to martensitephase, with a large change in Young’s modulus.At a molecular level, the phase transformationproceeds at the local speed of sound of the

Maximum recoverable strain 6%Youngs modulus (martensite), Gpa 23.7Youngs modulus (austenite), Gpa 53.5Activation temperature, F 94Density, g/cc 6.45Wire diameter, in 0.005Linear resistance, ohms/in 1.7
Table 1. Typical Properties of SMA Wire
material. However, as the material is thermallyactivated, the overall speed of the transformationis limited by the heat transfer rate in the material,which is typically much slower than the localspeed of sound. Consequently, actuation basedon the shape memory effect is usually very slow,and typical actuators operate at frequencies of lessthan 1 Hz.
The major factors affecting the bandwidth ofSMA wire are the heating and cooling rates.While the heating rate can be increased byincreasing the current passed through the wire,the cooling rate depends primarily on theconvective heat transfer from the wire to thesurrounding medium. The cooling rate can beincreased by decreasing the diameter of the wires.Therefore, the wires must be thin enough toachieve the required bandwidth, but thick enoughto sustain the required actuation force.
Figure 10 shows a schematic of the stress-strainbehavior of a SMA wire acting against springs ofdifferent stiffness. Also shown are the stress-straincurves of the SMA at low and high temperatures.The curves labeled (1) and (2) depict the strainrecovery of the SMA wire acting against a non-linear spring, while the curve labeled (3) depictsthe strain recovery of the SMA wire acting againsta linear spring. Curves (1) and (2) are of interestfor the present application because an SMA wirebehaves as a non-linear spring.
SMA Actuation
Figure 11 shows a schematic of an antagonisticSMA actuator with feedback. SMA wire 1 isheated by passing current through it from theDC voltage source. SMA wire 2 is kept at roomtemperature and small current is passed throughit to measure its resistance. The wires are initiallypre-strained by the same amount (approximately3%). Heating of wire 1 causes it to recover thepre-strain and increase the pre-strain in wire 2.
Figure 10. SMA Wire Strain Recovery withDifferent Loading Conditions.
current
SMA 1 SMA 2
motion
(actuator) (sensor)
low current source
DC voltage
Figure 11. Antagonistic SMA Wire Actuator.
The resistance in wire 2 changes as a result of itsdeformation and is measured to provide a positionfeedback for the actuator.
Each actuator implemented on this vehicle is anantagonistic SMA actuator, arranged as a bi-morph. In this configuration, an SMA wire isattached to either side of a stiff central structure.Passing current through one of the wires causes itto contract, bending the structure in the directionof the actuated wire. Passing current through theopposing wire causes the structure to bend in theopposite direction. As in the actuator shown infigure 11, the non-actuated wire can be used forposition, or bending, feedback. Alternately, if amore accurate measure of deformation is required,

Integrated SMAs
Composite Strips
Actuated SMA
Direction of Motion
(a) (b)
Figure 12. SMA Bi-Morph Actuator withIntegrated Wires.
strain gauges can be integrated into the structure.
Two SMA bi-morph architectures have beenconsidered. The first is an SMA sandwichstructure. This actuator consists of two SMAwires and three carbon strips arranged as seenin figure 12(a). When one SMA wire is actuated,the curvature of the actuator is changed. Thisis demonstrated in figure 12(b). Integrating theSMA wires into the structure has the advantageof protecting the wires.
In the second bi-morph architecture, the wiresare placed external to the carbon structure andare held in place using small brackets, as shownin figure 13(a). Once again, when one SMAwire is actuated, the curvature of the actuatoris changed and demonstrated in figure 13(b).Although this architecture does not offer the samedegree of protection for the wires as the first, itoffers a larger actuation moment since the wiresare placed further from the axis of symmetry.In addition, the external wires are more easilycooled, allowing faster actuation response times.From a practical standpoint, this configurationoffers the additional advantage that the wires aremuch easier to replace if broken.
Both SMA bi-morph architectures were evaluated.It was determined that for the first prototype of
SMAs
Composite Strip
Actuated SMA
Direction of Motion
SMAMounting Brackets
(a) (b)
Figure 13. SMA Bi-Morph Actuator withExternal Wires.
the vehicle, the external wire architecture waspreferable as it offered larger actuation momentsand ease of implementation.
Actuator Implementation and Testing
Recall that for a desired lateral motion, bothrotor planes must be tilted in the direction ofthe desired motion and thus the vehicle mustbe deformed as shown in figure 8. Once again,consider the schematic of the vehicle given infigure 4. Assume that a leftward motion isdesired. For the actuators to impose the appro-priate deformation, the curvature of the upperhalf of the left actuator and the lower half of theright actuator must decrease while the curvatureof the the lower half of the left actuator and theupper half of the right actuator must increase.This is demonstrated in figure 14
In order for a single SMA wire to cause opposingchanges in curvature in the upper and lower halvesof the actuator, the wire must switch from oneside of the actuator to the other between thehalves. Thus, both wires in a given SMA bi-morph must cross at the middle of the actuatoras shown in figure 15.
A single implemented actuator is shown in figure16. The mounting brackets for this actuator

Gravity
Thrust
IncreaseCurvature
DecreaseCurvature
DecreaseCurvature
IncreaseCurvature
Direction of Motion
Figure 14. Actuated Vehicle Schematic.
SMAs
SMACross-Over
Point Opposing Curvature
Composite Strip
Actuated SMA
(a) (b)
Figure 15. SMA Actuator with Cross-Over.
are small slotted disks which slide onto thestructure. Holes in the disks support the SMAwire. The actuator was attached to the vehicleelectronics and tested. The resulting deformationwas observed, and the displacement of the centralshaft from the rotational axis of the motors wasfound to be 1.4 mm at the center point of theshaft. The bandwidth of the actuator was foundto be on the order of 1 Hz. Note that thisdeformation was achieved using a single SMA wireactuator. Improved performance is anticipatedwhen all actuators are implemented as two SMAwires will be used to impose any desired moment.
SMAActuator
Figure 16. SMA Actuator Mounted on Vehicle.
Cross-Over Point
SMA Mounting Brackets
SMA Wire
(a) (b)
Figure 17. SMA Actuator Close-Up.
A new set of mounting brackets has beenmanufactured that are integral to the compositestructure. These brackets consist of smallsegments of teflon tube attached to the structureusing epoxy. For comparison, an enlarged viewof the cross-over point for each type of bracketis shown in figure 17. The original brackets infigure 17(a) are shown with SMA wires mounted,however, the wires have not yet been mountedin the new brackets shown in figure 17(b).Actuator fabrication is progressing and a compre-hensive assessment of their control effectivenesswill follow. However, preliminary tests indicatethat the rotor planes deflect as expected when theSMA wire is actuated. Further testing is requiredto determine whether the deflection provides suffi-cient control authority for the vehicle.

Yaw Control
Yaw control is achieved through differential rotorRPM. A yaw gyro is placed in series with thelower rotor. The gyro makes small adjustmentsto the RPM of the rotor so that the orientation ofthe vehicle is held relatively steady when no yawis commanded. When a yaw is commanded, theRPM of both rotors change so that the vehicle canyaw while holding a relatively constant altitude.
In addition, thrust is controlled by varying theRPM of the rotors in tandem. Hence, the yawgyro is required to ensure that yaw is kept to aminimum when a change in thrust is commanded.This approach has been show to be effective inpast research.2–5
Electronics Integration
As stated above, the vehicle electronics consistof a Li-Poly battery pack, a six-channel receiver,a yaw gyro, two motor speed controllers andfour small SMA control boards. The Li-Polybattery pack powers the vehicle and serves asthe structural support the vehicle electronics andpayload.
The primary challenge involved with integratingthe electronics is providing power to the uppermotor since, as seen in figure 1, the batteriesare located at the base of the vehicle. To solvethis problem, a single power conduit has beenincorporated into each structural support. Theconduit and solder point are shown in figure 18.
The conduit is integrated in the sandwichstructure between two 5 mil layers of viscoelasticpolymer, as shown in figure 18(a). Currently, thevehicle uses coreless motors and thus two of theconduits are used, one for the positive motor leadand one for the negative motor lead. However,since four conduits are available, the vehicle caneasily be upgraded to use three phase brushlessmotors.
A schematic of the resulting final structure withall current electronics integrated is shown in figure19. If it is determined that strain sensors arenecessary for actuator feedback, the can be easilyintegrated as shown in figure 20.
Summary and Conclusion
The focus of this paper is the developmentof a rotary wing MAV that uses an active,
Power Conduit in Viscoelastic
Solder Point for Conduit
(a)
(b)
Figure 18. Integrated Power Conduit.
Carbon Fiber Beams
5 mil Viscoelastic
SMA Wire Power Conduit
Integrated SMA Mounting Brackets
Figure 19. Structure Cross Section.
Carbon Fiber Beam
5 mil Viscoelastic
Integrated Strain Sensors
Figure 20. Structure Cross Section withIntegrated Strain Guages.

flexible structure to achieve stability and control.The inherent flexibility of the support structureis designed to enable the vehicle to demon-strate marginal passive stability, minimizing thework and thus the power drawn by an activestability system. Weight minimization is achievedthrough the incorporation of multi-functionalstructures. The flexible structure is made activeby integrating SMA wires. The SMA wiresprovide both actuation and a portion of thestructural support for the vehicle. A Li-Polybattery pack is used as the support structure forthe MAV electronics and sensors, further reducingthe vehicle weight.
An actuator was fabricated and tested. Theactuator behaved as expected, producing thedeformation required for lateral motion. Theactuator was found to have a bandwidth on theorder of 1 Hz. An assessment of the controleffectiveness of the actuator in in progress.
Acknowledgements
This research is supported by the Army ResearchOffice through the MAV MURI Program (GrantNo. ARMY-W911NF0410176) with Dr. GaryAnderson serving as Technical Monitor.
References
1. “CIA Exhibits Spy Gadgets with Bond Edge,”Reuters, Retrieved from http://www.cnn.com/2003/TECH/10/28/tech.cia.reut/index.html, October 28,2003.
2. Samuel, P., Sirohi, J., Rudd, L., Pines, D. and Perel,R., “Design and Analysis of a Micro Coaxial Rotor-craft,” Proceedings of the AHS Vertical Lift AircraftDesign Conference, San Francisco, CA, January 19-21, 2000.
3. Bohorquez, F., Samuel, P., Sirohi, J., Rudd, L., Pines,D. and Perel, R., “Design, Analysis and Performanceof a Rotary Wing MAV, Journal of the AmericanHelicopter Society, Vol. 48, No. 2, pp. 80-90, April,2003.
4. Bohorquez, F. and Pines, D., “Hover Performance andSwashplate Design of a Coaxial Rotary Wing MicroAir Vehicle,” Proceedings of the AHS 60th Forum,Baltimore, MD, June 7-10, 2004.
5. Bohorquez, F. and Pines, D., “Rotor Designfor Efficient Rotary Wing Micro Air Vehicles,”Proceedings of the AHS International Specialists’Meeting - Unmanned Rotorcraft: Design, Control andTesting, Chandler, AZ, January 18-20, 2005.
6. Buehler, W., Wiley, R. and Wang, F., “Nickel-BasedAlloys,” US Patent 3,174,851,23, March, 1965.
7. Chopra, I., “Review of State of Art of Smart Struc-tures and Integrated Systems,” AIAA Journal, Vol.40, No. 11, pp. 2145-2187, November, 2002.
8. Prahlad, H., and Chopra, I., “Experimental Charac-teristics of Ni-Ti Shape Memory Alloys underUniaxial Loading Conditions,” Journal of IntelligentMaterial Systems and Structures, Vol. 11, No. 4, pp.272-282, 2001.
9. Dynalloy Inc., “Website: http://www.dynalloy.com,Technical Characteristics of Flexinol TM ActuatorWires,” Dynalloy, Inc., 3194-A Airport Loop Dr.,Costa Mesa, CA 92626-3405, 2002.
10. Wayman, C., and Duerig, T., “Engineering Aspectsof Shape Memory Alloys,” in An introductionto martensite and shape memory, Butterworth-Heinemann Ltd., 1990.
11. Fay, J., The helicopter: history, piloting and how itflies, Newton Abbot: David & Charles, 4th ed. 1987,c1954.