DESIGN AND PERFORMANCE OF TELESCOPING MICROPIPETTE ARRAYS...
4
DESIGN AND PERFORMANCE OF TELESCOPING MICROPIPETTE ARRAYS FOR HIGH THROUGHPUT IN VIVO PATCH CLAMPING Suhasa B. Kodandaramaiah 1 , Saifullah Malik 1 , Mike J. Dergance 1 , Edward S. Boyden 2 and Craig R. Forest 1 1 George W. Woodruff School of Mechanical Engineering Georgia Institute of Technology Atlanta, Georgia, United States 2 Department of Brain and Cognitive Sciences Massachusetts Institute of Technology Cambridge, Massachusetts, United States ABSTRACT Precise positioning (e.g., 1-100 μm) of an electrode or arrays of electrodes is a critical requirement for many in vivo electrophysiology studies. We are developing an instrument to manipulate arrays of micropipette electrodes utilizing a novel actuation strategy wherein flexible fused silica micropipettes telescope within teflon conduits configured in non- rectilinear configurations. This strategy circumvents the steric hindrances that limit the number micropipettes to just one in conventional setups. To prove this concept, we have designed a device that allows the simultaneous actuation of an array of four micropipettes. We have experimentally characterized the linear translation of micropipettes in this device and have achieved a minimum step resolution of 1 μm. Further in vivo electrophysiology experiments validate the efficacy of this device for in vivo patch clamping. INTRODUCTION In vivo patch clamping (IVPC) is an electrophysiology technique used to measure sub-threshold synaptic events, as well as intrinsic channel activities, with extremely high signal-to noise and fine temporal precision, during defined behavioral or pathological states [1,2]. Using IVPC to record from multiple neurons simultaneously in behaving animals would allow us to understand how neural dynamics emerge from the synaptic and electrical processes within neuronal networks. Despite the advantages, it has proven to be a very difficult technique to use and to date, no system has been proposed for recording arbitrarily large numbers of cells, in the fashion of tetrodes or multi-electrode arrays. The stereotaxic hindrance in a conventional IVPC setup limits the number of micropipettes that can be simultaneously controlled in the confined experimental space to just one. We are working to develop instrumentation for precise positioning of the tips of densely packed array of micropipettes to be used for patch clamping in vivo. It is based on a novel actuation strategy that allows micrometer resolution positioning of flexible fused silica micropipettes that telescope within sheaths in non-rectilinear configurations (Figure 1). FIGURE 1. Schematic of the micropipette actuation strategy. The teflon sheath forms a curved, rigid and low friction conduit for the translation of a flexible fused silica micropipette. The micropipette tips used for IVPC can be closely spaced in a 2-dimensional array (e.g., 1 mm apart), while the distal ends (e.g., the ends away from the brain, which connect to amplifiers and manipulators) can be spaced far apart, so that inexpensive motors and stages can be used to perform the actuation. The fused silica micropipettes are flexible laterally yet stiff axially for accurate translation and force feedback. Since fused silica is not typically used for IVPC, we have characterized its ability to subserve precision movement and electrophysiology. MATERIALS AND METHODS In order for IVPC to be scalable to multiple micropipettes, several key design criteria must be satisfied. First, the micropipettes must have a very consistent tip size and access resistance
Transcript of DESIGN AND PERFORMANCE OF TELESCOPING MICROPIPETTE ARRAYS...
DESIGN AND PERFORMANCE OF TELESCOPING MICROPIPETTE ARRAYS FOR HIGH THROUGHPUT IN VIVO PATCH CLAMPING
Suhasa B. Kodandaramaiah1, Saifullah Malik1, Mike J. Dergance1, Edward S.
Boyden2 and Craig R. Forest1 1George W. Woodruff School of Mechanical Engineering
Georgia Institute of Technology Atlanta, Georgia, United States
2Department of Brain and Cognitive Sciences Massachusetts Institute of Technology
Cambridge, Massachusetts, United States
ABSTRACT Precise positioning (e.g., 1-100 µm) of an electrode or arrays of electrodes is a critical requirement for many in vivo electrophysiology studies. We are developing an instrument to manipulate arrays of micropipette electrodes utilizing a novel actuation strategy wherein flexible fused silica micropipettes telescope within teflon conduits configured in non-rectilinear configurations. This strategy circumvents the steric hindrances that limit the number micropipettes to just one in conventional setups. To prove this concept, we have designed a device that allows the simultaneous actuation of an array of four micropipettes. We have experimentally characterized the linear translation of micropipettes in this device and have achieved a minimum step resolution of 1 µm. Further in vivo electrophysiology experiments validate the efficacy of this device for in vivo patch clamping. INTRODUCTION In vivo patch clamping (IVPC) is an electrophysiology technique used to measure sub-threshold synaptic events, as well as intrinsic channel activities, with extremely high signal-to noise and fine temporal precision, during defined behavioral or pathological states [1,2]. Using IVPC to record from multiple neurons simultaneously in behaving animals would allow us to understand how neural dynamics emerge from the synaptic and electrical processes within neuronal networks. Despite the advantages, it has proven to be a very difficult technique to use and to date, no system has been proposed for recording arbitrarily large numbers of cells, in the fashion of tetrodes or multi-electrode arrays. The stereotaxic hindrance in a conventional IVPC setup limits the number of micropipettes that can
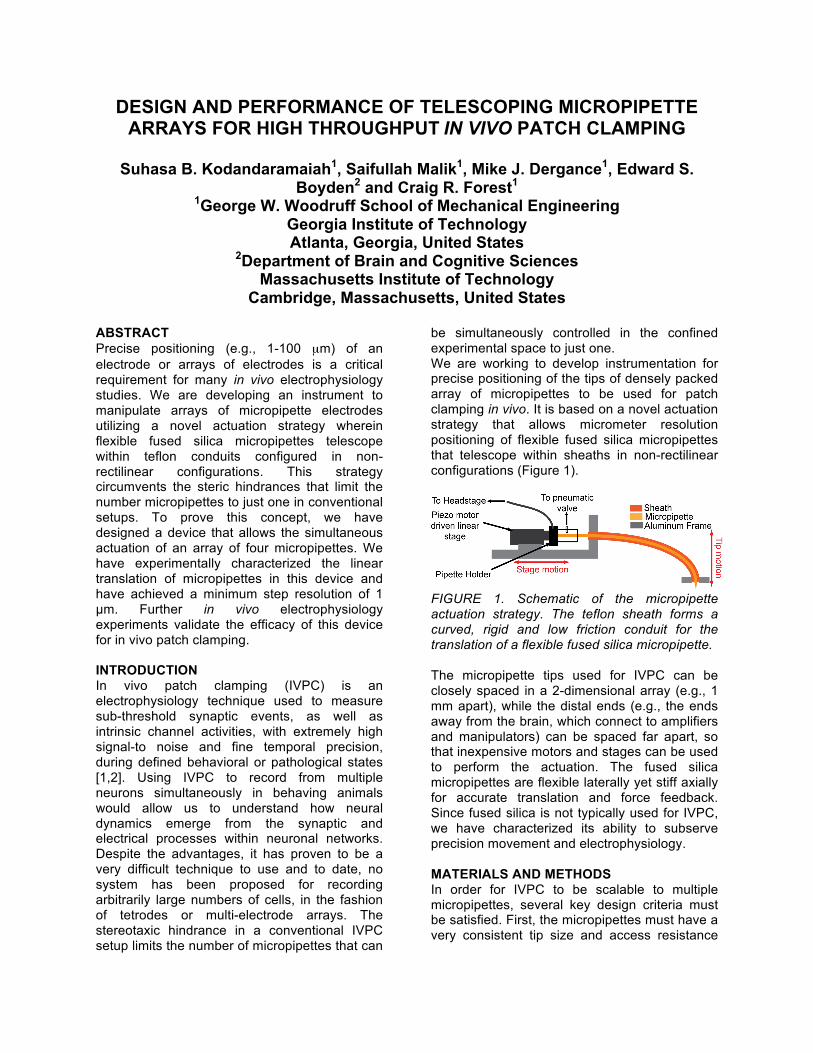
be simultaneously controlled in the confined experimental space to just one. We are working to develop instrumentation for precise positioning of the tips of densely packed array of micropipettes to be used for patch clamping in vivo. It is based on a novel actuation strategy that allows micrometer resolution positioning of flexible fused silica micropipettes that telescope within sheaths in non-rectilinear configurations (Figure 1).
FIGURE 1. Schematic of the micropipette actuation strategy. The teflon sheath forms a curved, rigid and low friction conduit for the translation of a flexible fused silica micropipette. The micropipette tips used for IVPC can be closely spaced in a 2-dimensional array (e.g., 1 mm apart), while the distal ends (e.g., the ends away from the brain, which connect to amplifiers and manipulators) can be spaced far apart, so that inexpensive motors and stages can be used to perform the actuation. The fused silica micropipettes are flexible laterally yet stiff axially for accurate translation and force feedback. Since fused silica is not typically used for IVPC, we have characterized its ability to subserve precision movement and electrophysiology. MATERIALS AND METHODS In order for IVPC to be scalable to multiple micropipettes, several key design criteria must be satisfied. First, the micropipettes must have a very consistent tip size and access resistance

[3]. Second, the micropipettes must be packable in close proximity (e.g., within a millimeter of each other) so that they can record neurons in the same brain, and ideally the same microcircuit, without steric hindrance from the amplifiers and translation stages that are typically attached to the micropipettes. Third, the system must allow for positive and negative pressure to be delivered to each micropipette, in an automated fashion, as traditional single-electrode patching methods will not scale easily to many electrodes.
FIGURE 2: (a) Photograph of the prototype fourmicropipette array, (b) the configuration of the curved Teflon sheaths within it, and (c) headstage containing 4 parallel translating fused silica micropipettes. Accordingly, we set out to design the micropipette array that allows independent control of an array of 4 micropipettes spaced 1 mm apart with a travel range of 10 mm and minimum step resolution of 1 µm (Figure 2). The micropipettes were formed by pulling polyimide coated fused silica capillaries (300 µm ID, 650 µm OD, Polymicro Technologies Inc) using the P2000 pipette puller (Sutter Instrument Company). They were routed between the control hardware and dense, parallel packing of the tips in a 1 mm x 1 mm square area via Teflon sheaths (AWG 21, Zeus Inc) that act as conduits (See Figure 2b,c). This packing density is advantageous for introducing multiple micropipettes into a 3 mm x 3 mm craniotomy on a head-fixed mouse. The sheaths are routed in a
curved configuration through a 3D printed ABS chassis. The curvature of the sheaths was empirically determined (see the following section) to be the most effective for telescoping fused silica capillaries within them. They are fixed in place by filling the chassis with epoxy adhesive and letting it cure, thus forming rigid and low-friction conduits for the micropipette translation. A spring loaded shaft translating in a linear-roller ball bearing acts as an inexpensive interface between a pipette holder (Axon instruments Inc) and a piezo-motor (Newport Corporation) for linear actuation. EXPERIMENTAL RESULTS Linear Translation Characterization
FIGURE 3: Experimental setup used for screening geometrical parameters affecting micropipette translation. Using the setup shown in Figure 3, we tested the feasibility of actuating micropipettes telescoping in sheaths fixed in various configurations. We systematically varied two main geometric parameters: the bend radius (8-22 cm), and micropipette length (5-20 cm) as shown. We observed stick slip phenomenon in the lower bend radii configurations (8 and 10 cm). Further, the maximum length of the micropipettes in the device had to be limited to 10 cm to facilitate easy back filling. Using these criterions, we designed the micropipette array to telescope within 6cm long sheaths bent at 12cm radius. We characterized the displacement of successive components of the actuation system as a function of the piezo-motor micro-steps (Figure 3). Shown in figure 4 is the displacement of the micropipette tip with respect to piezo-motor actuated at 1-µm steps.

We have been successful in achieving the aimed minimum step resolution of 1+/-0.287 µm and the actuator exhibits good linearity (r2=0.997) for a range of up to 10 millimeters.
FIGURE 3: Displacements of various components of the actuation system as function of piezo-motor microsteps. Accuracy of displacement increases with successive steps in the system. We conducted the metrology experiments using both contact (dial gauge, Mahr Inc) and non-contact (capacitive sensor, Capacitec Inc) methods. Thus, the actual penetrative motion of the micropipette in the brain tissue is an interpolation of the motion characteristic observed in these two methods.
FIGURE 4: Displacement of the micropipette tip with respect to actuator input. Measured accuracy is +/- 0.287 µm, r2=0.997 (n=5). The principle difference observed was the introduction of a settling time of 1.6 seconds for the micropipette to reached the desired displacement when the measurements were taken using the dial gauge. This is because of the force exerted on the micropipette tip by the dial gauge head. However, no dynamic effects were observed in the electrophysiology experiments described in the following section.
In rare instances, it is advantageous in an IVPC experiment to be able to retract the micropipette to de-clogging the tip. We have measured the micropipette translation backlash error to be 12 µm. In Vivo Electrophysiology To test the efficacy of the device, in vivo electrophysiology experiments were conducted on anesthetized mice using the micropipette array. We have successfully recorded dendritic spikelet activity in vivo (Figure 5a). Further, we compared the electrical impedance changes in the fused silica micropipette in the proximity of a neuron to a conventional IVPC experimental setup where a borosilicate micropipette was actuated by the commercially available MPC 200 (Sutter Instruments Inc) micromanipulator (Figure 5b).
FIGURE 5: (a) Dentritic spikelet recordings from a neuron in vivo using the designed micropipette array, (b) comparison of the micropipette resistance to the change observed in a borosilicate micropipette in a standard IVPC setup as a neuron is approached (zero displacement is taken as the point at which resistance change is first observed). In both methods, the micropipettes could be advanced 10-15 µm from the time an increase in resistance was observed before impaling/brushing past the neuron (indicated by a drop in resistance). Thus we can conclude that the micropipette actuation strategy can be used with the predicted accuracy even as it penetrates the brain tissue. CONCLUSION Independent micrometer resolution manipulation of densely packed micropipette arrays enables

the measurement of sub-threshold synaptic activity in vivo from multiple neurons simultaneously. We have characterized the linear translation telescoping actuation strategy can be used to actuate the micropipettes with micrometer step resolution. In vivo electrophysiology experiments show that micropipette can be successfully used for patch clamping and are comparable to commercially available micromanipulators. This device will allow us to target up to four neurons simultaneously in vivo. Further scaling of the device and developing an algorithm to automate the patch clamping protocol could allow the control of up to 25 such micropipettes. This will represent a paradigm shift in the scalability of patch clamping technology and will, in future years, potentially enable recordings from arbitrarily large numbers of cells, in the fashion of tetrodes and multi-electrode arrays. REFERENCES [1] Harvey C D, Collman F, Dombeck D A,
Tank D W, Intracellular dynamics of hippocampal place cells during virtual navigation. Nature 2009. 461(7266): p. 941-U196.
[2] Dombeck D A, Khabbaz A N, Collman F, Adelmann T A, Tank D W, Imaging large-scale neural activity with cellular resolution in awake, mobile mice. Neuron, 2007. 56(1): p. 43-57.
[3] Margrie T W, Brecht M, and Sakmann B, In vivo, low-resistance, whole-cell recordings from neurons inthe anaesthetized and awake mammalian brain. Pflugers Arch, 2002. 444(4): p. 491-8.









![SEMI-PROFESSIONAL TELESCOPING WANDS - …envirospec.com/pdfarchive/TWands3.pdf · 12/18/24 FT TELESCOPING WAND [FIBERGLASS] Semi-Professional, Commercial, & Industrial Use TELESCOPING](https://static.fdocuments.net/doc/165x107/5ad84b307f8b9af9068d531b/semi-professional-telescoping-wands-ft-telescoping-wand-fiberglass-semi-professional.jpg)








