Design and performance analysis of the Real-Time HCCA...
15
Design and performance analysis of the Real-Time HCCA scheduler for IEEE 802.11e WLANs Claudio Cicconetti * , Luciano Lenzini, Enzo Mingozzi, Giovanni Stea Dipartimento di Ingegneria dell’Informazione, University of Pisa, Pisa, Italy Available online 6 February 2007 Abstract This paper presents a new scheduling algorithm, called Real-Time HCCA (RTH), devised to support Quality of Service (QoS) at the flow level in an IEEE 802.11e network using the Hybrid Coordinator Function (HCF) Controlled Channel Access (HCCA) function. RTH separates online activities which take place at the frame transmission timescale, from offline activities which take place at the flow lifetime timescale. Complex computations are relegated to offline activities, while online tasks are kept as simple as possible. More specifically, at admission control time, RTH computes a periodic schedule based on the well-known Earliest Deadline First algorithm for 802.11e Traffic Streams (TSs). In doing so, the Stack Resource Policy is applied to account for non-pre-emptability of frame transmissions. Furthermore, the parameters are configured so as to reduce the MAC overhead due to polling uplink TSs. On the other hand, online scheduling is enforced simply by reading the pre-computed schedule, at little or no computational cost. RTH performance is assessed in terms of the admission control limit and of the amount of channel capacity that is left for contention-based access. Under both criteria, RTH is shown to outperform the sample scheduler proposed in IEEE 802.11e. Ó 2007 Elsevier B.V. All rights reserved. Keywords: Wireless LANs; Quality of service; Real-time scheduling; Admission control; 802.11e; HCCA 1. Introduction The IEEE 802.11 [9] has established itself as the worldwide standard in terms of indoor and outdoor wireless LANs (WLANs). The growing interest by customers in applications requiring Quality of Ser- vice guarantees, such as Voice over IP (VoIP), has led to the standardization of the IEEE 802.11e stan- dard [8]. This has in fact enhanced the IEEE 802.11 standard by adding QoS support. More specifically, IEEE 802.11e specifies the Hybrid Coordinator Function (HCF) Controlled Channel Access (HCCA) function, which requires centralized sched- uling and allows applications to negotiate parame- terized service guarantees. IEEE 802.11e also specifies the Enhanced Distributed Coordination Access (EDCA) function, which achieves statistical service differentiation in a distributed manner. HCCA is specifically devised to transmit traffic with real-time constraints. Scheduling in 802.11e HCCA is controlled by the Hybrid Coordinator (HC), which transmits downlink data frames and schedules 1389-1286/$ - see front matter Ó 2007 Elsevier B.V. All rights reserved. doi:10.1016/j.comnet.2007.01.027 * Corresponding author. Tel.: +39 050 2217 452; fax: +39 050 2217 600. E-mail addresses: [email protected] (C. Cicconetti), [email protected] (L. Lenzini), [email protected] (E. Mingozzi), [email protected] (G. Stea). Computer Networks 51 (2007) 2311–2325 www.elsevier.com/locate/comnet
Transcript of Design and performance analysis of the Real-Time HCCA...

Computer Networks 51 (2007) 2311–2325
www.elsevier.com/locate/comnet
Design and performance analysis of the Real-Time HCCAscheduler for IEEE 802.11e WLANs
Claudio Cicconetti *, Luciano Lenzini, Enzo Mingozzi, Giovanni Stea
Dipartimento di Ingegneria dell’Informazione, University of Pisa, Pisa, Italy
Available online 6 February 2007
Abstract
This paper presents a new scheduling algorithm, called Real-Time HCCA (RTH), devised to support Quality of Service(QoS) at the flow level in an IEEE 802.11e network using the Hybrid Coordinator Function (HCF) Controlled ChannelAccess (HCCA) function. RTH separates online activities which take place at the frame transmission timescale, from offline
activities which take place at the flow lifetime timescale. Complex computations are relegated to offline activities, whileonline tasks are kept as simple as possible. More specifically, at admission control time, RTH computes a periodic schedulebased on the well-known Earliest Deadline First algorithm for 802.11e Traffic Streams (TSs). In doing so, the StackResource Policy is applied to account for non-pre-emptability of frame transmissions. Furthermore, the parameters areconfigured so as to reduce the MAC overhead due to polling uplink TSs. On the other hand, online scheduling is enforcedsimply by reading the pre-computed schedule, at little or no computational cost. RTH performance is assessed in terms ofthe admission control limit and of the amount of channel capacity that is left for contention-based access. Under bothcriteria, RTH is shown to outperform the sample scheduler proposed in IEEE 802.11e.� 2007 Elsevier B.V. All rights reserved.
Keywords: Wireless LANs; Quality of service; Real-time scheduling; Admission control; 802.11e; HCCA
1. Introduction
The IEEE 802.11 [9] has established itself as theworldwide standard in terms of indoor and outdoorwireless LANs (WLANs). The growing interest bycustomers in applications requiring Quality of Ser-vice guarantees, such as Voice over IP (VoIP), hasled to the standardization of the IEEE 802.11e stan-
1389-1286/$ - see front matter � 2007 Elsevier B.V. All rights reserved
doi:10.1016/j.comnet.2007.01.027
* Corresponding author. Tel.: +39 050 2217 452; fax: +39 0502217 600.
E-mail addresses: [email protected] (C. Cicconetti),[email protected] (L. Lenzini), [email protected] (E.Mingozzi), [email protected] (G. Stea).
dard [8]. This has in fact enhanced the IEEE 802.11standard by adding QoS support. More specifically,IEEE 802.11e specifies the Hybrid CoordinatorFunction (HCF) Controlled Channel Access(HCCA) function, which requires centralized sched-uling and allows applications to negotiate parame-terized service guarantees. IEEE 802.11e alsospecifies the Enhanced Distributed CoordinationAccess (EDCA) function, which achieves statisticalservice differentiation in a distributed manner.HCCA is specifically devised to transmit traffic withreal-time constraints. Scheduling in 802.11e HCCAis controlled by the Hybrid Coordinator (HC),which transmits downlink data frames and schedules
.

2312 C. Cicconetti et al. / Computer Networks 51 (2007) 2311–2325
uplink transmissions by polling the associated sta-tions. While the standard does not specify that amandatory scheduling algorithm must be imple-mented at the HC, the latter is of obvious impor-tance in terms of QoS provisioning capabilities, asdiscussed in [6].
In this paper we address the problem of real-timescheduling in HCCA. More specifically, our aim isto devise a scheduling algorithm that provides trafficflows with a fixed amount of granted capacity over afixed period. This kind of service is well suited, forinstance, to Voice over IP (VoIP) traffic, which gen-erates constant size packets at fixed intervals. Suchan algorithm should be flexible, i.e., able to copewith flows with different requirements (e.g., voicecoding schemes with different packet generationrates). It should also be effective, so as to allowfor a high utilization of the medium, and simple,so that scheduling decisions do not require anunfeasible amount of computations at the HC. Tothe best of our knowledge, there are only twoHCCA algorithms in the literature that are designedto provide traffic flows with the aforementionedreal-time guarantees: the sample scheduler, whichhas been included in the 802.11e document forinformation purposes, and Scheduling based onEstimated Transmission Time (SETT-EDD) [7].However, neither fulfills all the above-mentionedrequirements. In fact, the sample scheduler tendsto perform poorly when scheduling flows with dif-ferent service requirements. On the other hand,SETT-EDD may require as many as O(n) opera-tions per scheduling decision, n being the numberof admitted flows. Furthermore, no schedulabilitytest has been provided, nor can it be straightfor-wardly derived. Thus it is not possible to decide apriori whether a flow can be admitted or not.
In this paper, we overcome the limitations of theabove-mentioned algorithms by proposing Real-Time HCCA (RTH) as a new scheduling algorithmfor real-time traffic in 802.11e HCCA. The basicidea behind RTH (see [3]) is to split the schedulingtask into online and offline activities. The formeroccur at the MAC frame transmission timescale,and are kept as simple as possible. The latter occurat the flow lifetime timescale, which is expected tobe several orders of magnitude larger than theMAC frame transmission’s timescale. At the lattertimescale it is feasible to trade simplicity for effec-tiveness, i.e., to perform more complex computa-tions in order to optimize the performance. InRTH, offline activities include: (i) checking the
admission of a new flow, i.e., testing whether it ispossible to provide the new flow with the requiredQoS guarantees without violating those of thealready admitted flows, and (ii) computing a timeta-ble, i.e., a periodic schedule of transmission oppor-tunities for the admitted flows. The only onlineactivity consists of looking up the pre-computedtimetable, and granting transmission opportunitiesto the various stations accordingly. Thus, onlinescheduling requires O(1) operations per schedulingdecision with respect to the number of admittedflows. The RTH timetable is computed accordingto the Earliest Deadline First (EDF) schedulingalgorithm [11,16]. The latter is a well-known real-time scheduling algorithm, whose main idea is toschedule the task with the earliest deadline. In otherwords, it assumes a fluid system model, where taskscan be scheduled arbitrarily small amounts ofcapacity. Such a model does not hold for 802.11e,where packets of finite duration require atomictransmission. For this reason, we also borrow theconcept of blocking from the Stack Resource Policy(SRP) [1,16]: a higher priority task is not allowed topreempt the ongoing task whenever the latter is in acritical section. IEEE 802.11e frame exchangesequences are in fact regarded as critical sections.Moreover, we devise a simple, yet effective proce-dure to minimize the overhead of polling uplinkflows within the above framework.
The paper is organized as follows. In Section 2we describe the features of the IEEE 802.11eMAC protocol to support QoS, and review relatedresearch. The RTH scheduling algorithm isdescribed in Section 3, and analyzed in Section 4.Finally, conclusions are drawn in Section 5.
2. IEEE 802.11e and QoS support
In this section, we set out the necessary back-ground to the paper. First, we describe the enhance-ments of 802.11e that are related to the support ofQoS using HCCA, as well as introducing somenotations that will be used throughout this paper.We then review the related work on real-time sched-uling in HCCA.
2.1. IEEE 802.11e MAC protocol
As already mentioned, HCCA is a centralizedaccess mechanism controlled by the HC, whichresides in the QoS-Access Point (QAP). Each QoS-enabled 802.11e station (QSTA) may establish up

C. Cicconetti et al. / Computer Networks 51 (2007) 2311–2325 2313
to eight HCCA Traffic Streams (TS). TSs are guar-anteed a parameterized QoS access to the medium,and they can be either uni-directional (i.e., uplinkor downlink), or bi-directional. In all cases, TSsare initiated and terminated only by QSTAs. How-ever, the QAP performs an admission control proce-dure to ensure that the admission of a new TS doesnot violate the service guarantees of the alreadyadmitted TSs.
The QAP can take control of the medium when-ever it needs to allocate transmission opportunities(TXOPs) to TSs. It does so by accessing the mediumwith a higher priority than QSTAs. Note howeverthat the QAP is not allowed to interrupt ongoingtransmissions. During TXOPs, the medium isaccessed by only one QSTA. More specifically, adownlink TXOP consists of a burst of QoS Data(data, for short) frames transmitted from the QAPto a QSTA. On the other hand, an uplink TXOPis initiated when the QAP polls a QSTA, whichtakes control of the medium for a time intervalsmaller than or equal to the TXOP duration limitspecified in the QoS CF-Poll (poll, for short) mes-sage. If the TS of a polled QSTA does not have datato transmit, or if the head-of-line packet does not fitinto the remaining TXOP duration, the QSTA sendsa QoS CF-Null (null, for short) frame to the QAP. Ifthe polled QSTA does not use up the TXOPentirely, then the QAP has two options: (i) takeback control of the medium, by immediately start-ing a new TXOP, or (ii) resume the contention-based access to the medium. A sample HCCA frameexchange sequence is illustrated in Fig. 1.
The time spent in polling QSTAs can beaccounted for as a MAC overhead, which is addedto the overhead due to direct acknowledgment ofdata frames. However, such overhead can bereduced by combining multiple control messagesand/or piggybacking them on data frames. If the
Fig. 1. Sample HCCA fram
optional piggybacking feature is supported, theQAP may piggyback an acknowledgment and/or apoll on the ongoing data frame, as long as the con-trol messages and the data frame are addressed tothe same recipient. An example of how piggybac-king reduces the polling overhead is shown inFig. 1, where the second poll message from theQAP is piggybacked on a data frame. Furthermore,the optional QAck feature allows the QAP tocombine control and data messages addressed todifferent QSTAs. More specifically, the QAP canpiggyback a poll message directed to a QAck-enabled QSTA on a data frame addressed toanother QSTA, or on a message that acknowledgesthe correct reception of a data frame from anotherQSTA. Additionally, the QAP can jointly transmita data frame to a QSTA and acknowledge the cor-rect reception of a data frame from anotherQAck-enabled QSTA.
A QSTA requests the admission of a new TS i bysending an Add Traffic Stream (ADDTS) messageto the QAP, which contains the Traffic Specification(TSPEC). In this study, we only consider the subsetof five mandatory TSPEC fields, which are, for TS i:mean data rate (Ri), nominal Service Data Unit
(SDU) size (Ni), minimum PHY rate (Ci), delay
bound (Di) and maximum service interval (MSIi).The first four parameters characterize TS i. Specifi-cally, the delay bound field specifies the maximumlifetime of an SDU at the QSTA: if an SDU experi-ences a delay greater than Di, it is dropped by theQSTA. The parameter MSIi is a service require-ment, and corresponds to the maximum time thatcan elapse between two subsequent polls at the sameQSTA. The standard allows us to specify oneparameter between Di and MSIi, or both. If theQAP admits the TS, it responds to the ADDTS witha positive acknowledgment message. The latterincludes the service start time, which specifies the
e exchange sequence.

2314 C. Cicconetti et al. / Computer Networks 51 (2007) 2311–2325
starting time from when the QSTA is allowed tosend frames that belong to the admitted TS.
According to [8], the QAP is responsible forscheduling TXOPs so that the negotiated TSPECparameters of admitted TSs are satisfied. More spe-cifically, for any time interval [t1, t2] greater than aminimum specification interval, which is selectedby the QAP, the HCCA function is committed toscheduling a number of TXOPs to TS i, whosecumulative duration Wi(t1, t2) is such that
W iðt1; t2ÞPRi
N iðt2 � t1 � DiÞ
� �� tNi ; ð1Þ
where Di is equal to MSIi, if MSIi is specified, other-wise it is equal to Di, and tNi is the nominal transmis-
sion time for TS i. In fact, tNi is the time to transmitan SDU that belongs to TS i, including the timeneeded to receive the corresponding acknowledg-ment and the interframe spaces (see Fig. 1)
tNi ¼ SIFSþ tPHY þhMAC þ Ni
CDATAi
� �þ SIFSþ tPHY þ
hACK
CACKi
� �;
where tPHY is the time duration of the PHY header,hMAC (hACK) is the size of the MAC header(acknowledgment frame), and CDATA ðCACKiÞ isthe physical transmission rate of data (acknowledg-ment) frames. The notations are summarized inTable 1.
2.2. Related work
Current research challenges of 802.11e haverecently been reviewed in [13]. The authors state
Table 1Glossary of HCCA notation
Parameter
Mean data rate (bps) R
Nominal SDU size (bits) N
Minimum PHY rate (bps) CDelay bound (s) D
Maximum service interval (s) MSINominal transmission time (s) tN
Poll duration (s) tP
Size of the MAC header (bits) hMAC
Size of ACK frames (bits) hACK
Size of poll frames (bits) hPOLL
PHY transmission rate of data frames (bps) CDATA
PHY transmission rate of ACK frames (bps) CACK
PHY transmission rate of poll frames (bps) CPOLL
Duration of the PHY header (s) tPHY
that most existing work on HCCA is aimed at devis-ing strategies to improve the performance of Vari-able Bit-Rate (VBR) traffic. In fact, the standardQAP commitment reported in Eq. (1) is based onthe mean data rate. Thus, enforcing such a guaran-tee in the presence of VBR traffic would require theamount of capacity reserved at each period to beover-provisioned so as to absorb traffic peaks withsmall delays. However, the focus of this paper isto design an efficient HCCA scheduler which pro-vides TSs with a guarantee that complies with thestandard requirement. To the best of our knowl-edge, only two algorithms for this purpose havebeen proposed in the literature: the sample sched-uler, which has been included in the 802.11e docu-ment for information purposes, and Schedulingbased on Estimated Transmission Time (SETT-EDD) [7].
The sample scheduler serves each TS on a peri-odic basis, where the period (called Service Interval,SI) is the same for all TSs and is set to the smallestDi. The TXOP duration of TS i, namely eCi, is thenset to the smallest value that satisfies Eq. (1)
eCi ¼Ri
NiSI
� �� tNi ; ð2Þ
eCi is rounded up to contain an integer number ofSDUs of nominal size, which may produce a surplusbandwidth allocation to that particular TS. Notethat the TXOP computation according to the stan-dard is slightly different from the one in Eq. (2).Specifically, in Eq. (2) we do not take into accountthe maximum SDU size that can be specified in theTSs TSPEC. This is because in this study we onlyconsider those QoS guarantees that provide eachTS with a fixed amount of capacity granted on aperiodical basis.
The schedulability test is as follows: a given set ofTSs is schedulable with the sample scheduler if andonly ifP
iðeCi þ tPiÞSI
6 1;
where tP is the time to transmit a poll message,including the interframe space (see Fig. 1)
tP ¼ PIFSþ tPHY þhPOLL
CPOLL
� �;
where hPOLL is the size of poll frames and CPOLL isthe physical transmission rate of poll frames. Thepolling overhead of TS i, tPi , is equal to tP if i isan uplink TS, otherwise it is zero.

C. Cicconetti et al. / Computer Networks 51 (2007) 2311–2325 2315
The admission control algorithm and the methodto derive the timetable are extremely simple, yeteffective when all TSs have the same Di. However,if TSs with different Di are admitted, they are thenall served with the same period as the TS with thesmallest Di, i.e., SI. Therefore, all TSs with Di > SIare polled more often than needed, which unneces-sarily increases the polling overhead, thus wastingbandwidth.
SETT-EDD is based on an online version of theEarliest Due Date (EDD), which is a well-knownalgorithm in the real-time literature [16]. Specifi-cally, SETT-EDD requires that TSs additionallyspecify the minimum service interval (mSI), i.e., theminimum time that must elapse between twoconsecutive TXOPs, and the maximum burst size(MBS). The latter are used to set up virtual tokenbuckets, which are used to check the eligibility ofTXOPs. Furthermore, TXOPs are assigned a releasetime equal to mSI and a deadline equal to MSI.EDD is then used to select the next eligible TXOPto be scheduled. Therefore each scheduling decisionentails (i) updating the set of eligible TXOPs accord-ing to the virtual token buckets and (ii) selecting theone with the nearest deadline according to EDD.Unless complex data structures are employed, ascheduling decision may then require as many asO(n) operations, n being the number of admittedTSs. To make matters worse, since EDD relies onpreemption, which is not possible with packetizedtraffic, the theoretical results related to EDD cannotbe straightforwardly, if at all, applied to devise an
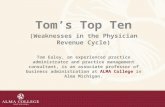
Fig. 2. RTH Architecture. The offline activities, i.e., the admission contrA flow diagram of the enforcement procedure, which is the only online
admission control test for SETT-EDD. As a matterof fact, no admission control test has been derivedfor SETT-EDD, which means that it is not possibleto guarantee a priori that deadlines are met.
In the following we present RTH, which unlikeSETT-EDD provides explicit a priori deadline guar-antees. Furthermore, we show that – although ithas the same online complexity as the sample sched-uler – it is more effective than the latter, in thatit better accounts for TSs with heterogeneousrequirements.
3. Real-Time HCCA (RTH) scheduler
RTH is made up of three blocks, as shown inFig. 2: an admission control algorithm, a timetable
computation algorithm and an enforcement proce-dure. The admission control and the timetable com-putation are offline activities, performed within theMAC sublayer Management Entity (MLME) ofthe QAP. The MAC sublayer of the QAP only runsthe enforcement procedure, which is the sole onlineactivity. As already outlined, the enforcement pro-cedure is used by the QAP to grant TXOPs to theadmitted TSs, based on a periodical timetable pre-pared by the timetable computation. The timetablecomputation is only run when the admission controladmits a new TS. The timetable computation isbased on theoretical results from the real-timescheduling literature, with regard to the EDF sched-uling algorithm [11] with the SRP policy [1]. Theadmission control procedure also produces sets of
ol and timetable computation procedures, are depicted on the left.activity, is reported on the right.

2316 C. Cicconetti et al. / Computer Networks 51 (2007) 2311–2325
parameters describing each admitted TS, which arerequired by the timetable computation procedure.Below we describe the three above-mentioned pro-cedures and their interaction.
3.1. Enforcement procedure
A timetable is a list of entries hi,TXOPi, tii, eachof which states that TS i can access the mediumwithin [ti, ti + TXOPi). Let us assume that the latteris made available at the MAC sublayer of the QAP.One step of the enforcement procedure, executedwhenever a TXOP ends, consists of reading the nextentry in the timetable, hi,TXOPi, tii, waiting untiltime ti (possibly allowing stations to access the med-ium using contention in between), and then grantinga TXOP of duration TXOPi to TS i. The block dia-gram of the enforcement procedure is reported inFig. 2, along with a sample timetable and its associ-ated schedule. Note that the enforcement procedurehas O(1) computational complexity with respect tothe number of admitted TSs. As mentioned above,the timetable is built offline by computing an EDFschedule based on the requirements of the admittedTSs.
3.2. Admission control
The admission control procedure is run by theQAP whenever a QSTA requests the admission ofa new TS. The set of TSPEC parameters advertisedby the QSTA is hRi,Ni,Di,Cii, which are the manda-tory traffic specifications and requirements of IEEE802.11e HCCA. Based on the admission controlalgorithm described in detail below, the QAP deci-des whether to accept or reject the TS, and immedi-ately notifies the QSTA. If the TS is accepted, theQAP computes a new timetable, to be used by theenforcement procedure, as described in Section3.3. Otherwise, the TS cannot be served usingHCCA.
In RTH, a TS i is characterized by a capacity Ci
and a period Ti, both expressed in time units, whichare computed from the TSPEC parameters as fol-lows. Firstly, the capacity Ci is computed as Ci ¼dðRi � T iÞ=Nie � tNi , which is the minimum needed tocomply with the TS requirements in Eq. (1). Theratio Ni/Ri is the expected average interarrival timeof SDUs of TS i. Then, if the delay bound is smallerthan the expected average interarrival time, Ti is setto the delay bound itself. Otherwise, Ti is set to the
largest multiple of Ni/Ri that is not greater than thedelay bound, i.e., b(Ri/Ni) Æ DicNi/Ri, since the con-straint Ti 6 Di must be adhered to.
Using the above TS characterization, and withthe idea of employing EDF as a scheduling algo-rithm, we can regard TSs as tasks in a multi-pro-grammed environment, and capitalize on theschedulability tests already devised for such a con-text. Let us assume, without loss of generality, thatTSs are sorted by increasing period duration, i.e.,i > j) Ti P Tj. Essentially, Ci is the cumulativeduration of the TXOPs scheduled by the QAP eachTi instant. In the case of uplink TSs, Ci has to takeinto account the overhead due to polling, which alsodepends on the availability of the QAck optionalfeature. Although the capacity Ci does not need tobe allocated in a single TXOP, the minimum TXOPfor TS i should not be smaller than the time neededto transmit a nominal size SDU, including a poll foruplink TSs. Should this constraint be violated,nominal size SDUs would not fit into scheduledTXOPs, and these TXOPs would thus be wasted.Therefore the minimum critical section bi of TSi is its nominal size SDU transmission, i.e.,bi ¼ tNi þ tPi . When TS i is in a critical section,and is thus scheduled instead of the highest priorityTS j, TS i is said to block TS j. Let Bi denote themaximum critical section durations of TSs with aperiod longer than TS i, i.e., Bi = maxj>i{bj}. A suf-ficient condition for a set of n TSs to be schedulablewith EDF under the above constraint is derivedfrom SRP as follows:
Bi
T iþXj6i
Cj þ pj � tPj
T j6 1 8i : 1 6 i 6 n; ð3Þ
where pi is the maximum number of times that theQAP has to poll TS i, during Ti, with a dedicatedpoll message. If QAck is enabled on all stations,pi = 1, because if TS j preempts TS i at a TXOPboundary during its service, the QAP can piggybackthe poll message to TS j on the last acknowledgmentmessage to TS i. If QAck is disabled, thenpi = d(Ri Æ Ti)/Nie, which is the number of nominalsize SDUs served each period, i.e., the maximumnumber of pieces in which the capacity Ci can besplit due to preemption without violating criticalsection durations. Note that inequalities in (3) as-sume that TS i is blocked for the maximum timeduring its execution, which might not actuallyhappen. Thus, condition (3) is sufficient but notnecessary.

C. Cicconetti et al. / Computer Networks 51 (2007) 2311–2325 2317
Clearly, Bi is a non-decreasing function of thecritical section duration bj (j > i). However, as longas Bi is such that (3) holds, increasing bj does notactually hamper the schedulability of a set of TSs.On the other hand, having longer critical sectionsyields lower MAC overhead, since the number ofpreemptions experienced by a TS i might actuallydecrease. We thus compute for each TS i anextended critical section duration, namely �bi, whichis the maximum value such that Eq. (3) holds. Thelatter will be used instead of bi to compute the time-table under EDF/SRP. For this purpose, we firstdefine the extended maximum blocking times, whichare denoted as Bi and computed as follows:1
Bi ¼ 1�Xj6i
Cj þ pj � tPj
T j
!T i 8i : 1 6 i < n: ð4Þ
Note that, by definition of Bi, all inequalities in (3)hold if we substitute Bi into Bi. Then, we set the crit-ical section durations of all TSs as follows:2
�bi ¼ minj<i
Bj 8i : 1 < i 6 n: ð5Þ
We now have to prove that the critical section dura-tions �bi, computed according to (5), are the largestones that satisfy (3). We can easily prove this prop-osition by contradiction. Assume that there exists aset of critical sections bj also satisfying (3), and anindex k such that �bk < bk. It immediately followsfrom the definition of Bi that bi 6 minj<iBj, whichcan be substituted into �bk < bk so as to obtain
minj<k
Bj < bk 6 minj<k
Bj: ð6Þ
However, we can rewrite each inequality in (3) asfollows:
Bj
T jþXh6j
Ch þ phtPh
T h
6 1 ) Bj 6 1�Xh6j
Ch þ phtPh
T h
!T j:
The latter can be substituted into (6), in addition to(4), so as to obtain
1 The maximum blocking time of the lowest priority TS is notdefined, as it is never blocked by other TSs.
2 The critical section duration of the highest priority TS is notdefined, as it never blocks any TS.
minj<k
1�Xh6j
Ch þ phtPh
T h
!T j
< minj<k
1�Xh6j
Ch þ phtPh
T h
!T j;
which is obviously false. This concludes our proof.In summary, the admission control procedure
consists of: (i) checking the schedulability, assumingthat each TS has critical sections whose duration istNi þ tPi , i.e., the transmission of an SDU with nom-inal size at the minimum PHY rate (normativerequirement); (ii) computing up to what extent thosecritical sections can be extended while still ensuringschedulability, by applying (5), and (iii) using theextended critical sections to build the timetable off-line, taking advantage of enlarged TXOP durationsto reduce the polling overhead.
3.3. Timetable computation
The timetable computation produces an EDFschedule of the admitted TSs, whose parametersTi, Ci and �bi are computed as described in the previ-ous section. The schedule duration H is equal to theLeast Common Multiple (LCM) of the periods ofthe admitted TSs. The following working variablesare used: t is the virtual clock, i.e., the time at whichthe procedure schedules either a TXOP to the TSwith the earliest deadline, or some capacity to con-tention-based access; the flag q, which is meaningfulonly if QAck is enabled, specifies whether a pollmessage can be piggybacked on the next TXOP ornot; C0i is the capacity that has to be granted toTS i before its deadline expires; Di is the deadlineof TS i; and finally, Ri is the release time of TS i,i.e., the start time of the next period at which Ci isreplenished. The add() function inserts a new entryin the timetable that will be used by the enforcementprocedure.
The pseudo-code for the timetable computationis reported in Fig. 3. The computation of Ti, Ci
and �bi is not shown since it only involves elementaryoperations, which have been described in the previ-ous section. After the initialization of the workingvariables (lines 1–7), the main body of the timetablecomputation is started. The latter is a loop that lastsuntil the virtual clock t reaches the schedule dura-tion H (line 8). Firstly, the procedure checkswhether there is at least one TS i with unfulfilledcapacity (lines 9–10). If this is not the case, the

Fig. 3. Pseudo-code for the timetable computation.
2318 C. Cicconetti et al. / Computer Networks 51 (2007) 2311–2325
virtual clock is put forward until the earliest releasetime, i.e., the expected arrival time of the next SDU,and the loop restarts immediately (lines 10–13). Inthis case, q is also set to false (line 12). This isbecause it is not possible to piggyback a poll onthe next TXOP, since there is a gap between twoconsecutive TXOPs, which is left for contention-based access functions. If there are TSs withunfulfilled capacity, then the TS with the earliest
deadline, say TS i, is scheduled a TXOP. The TXOPduration depends on the release time of TSs with ahigher priority, i.e., with an earlier deadline than TSi. If TS i has the highest priority at time t, then thewhole of its unfulfilled capacity C0i is scheduled(lines 15–24). The time to poll TS i is added if eitherQAck is disabled or if it is impossible to piggybackthe poll to TS i on the last scheduled TXOP, i.e., q isfalse (lines 16–17). Then, the main loop restartsimmediately (line 24). If a TS exists with an unful-filled capacity and a higher priority than TS i, sayTS k, then TS i can be preempted (on an SDUboundary) by TS k depending on the temporal dis-tance between Ri and Rk (lines 25–30). Beforeupdating the working variables of TS i (lines 34–38), the procedure restores the unfulfilled capacities,if any, of the TSs whose release times expire beforethe end of the scheduled TXOP (lines 32–33).
Fig. 4 shows an example of timetable computa-tion with three TSs, whose parameters are reportedon the right. The output with the sample scheduleris also reported as a reference. Note that bi is notused by the timetable computation, and is reportedfor explanatory purposes only. As can be seen, thetimetable is computed over a period H = 30 timeunits, which is the LCM of 5, 10, and 15. Accordingto EDF, at time t the TS with the highest priority(i.e., earliest deadline), among those with someresidual capacity, is scheduled a TXOP. However,at time t = 5, TS 1, which has the highest priority,cannot preempt TS 3, since the latter is in a criticalsection, i.e., it has been scheduled part of a mini-mum size TXOP starting at t = 4. If bi were usedfor the timetable computation, then TS 1 wouldbe scheduled a TXOP at t = 6. Using the extended
critical section duration �bi, TS 3 is allowed to blockTS 1 until t = 8, while still guaranteeing that nodeadline will be missed. In this example, using �bi
instead of bi thus saves the overhead of an addi-tional poll to TS 3.
Each iteration of the main loop in Fig. 3 mayrequire as many as O(n) operations per TXOP,where n is the number of admitted TSs, because ofthe searches in lines 9, 14, and 32. The number ofiterations is equal to the overall number of sched-uled TXOPs, which in turn depends on the totalnumber of preemptions, plus the number of idleHCCA intervals, i.e., those intervals while theQAP refrains from scheduling TXOPs, which areleft for contention-based access functions. In gen-eral, the number of preemptions with EDF is notknown a priori, and deriving a relatively tight upper

Fig. 4. RTH schedule with three TSs, whose parameters are reported on the right. At the bottom, the output of the sample scheduler isalso reported.
C. Cicconetti et al. / Computer Networks 51 (2007) 2311–2325 2319
bound requires complex computations [15]. How-ever, with RTH, the number of iterations of themain loop in Fig. 3 is upper bounded byX
i
ðdCi=�bie þ 1ÞðH=T iÞ; ð7Þ
since each TS i can be preempted at most bCi=�bictimes in one period. This is because of its extendedcritical section duration �bi, and because there canbe at most one idle HCCA interval for each periodof any TS i. Therefore, the timetable computationmay be computationally expensive. However, asalready observed, such an overhead is not an issue,since the timetable is computed on a timescale of ahigher order of magnitude than that of the enforce-ment procedure. Moreover, when a QSTA requeststhe admission of a new TS, the QAP can provide itwith a quick yes/no response based on the admis-sion control algorithm. The latter requires O(n) sim-ple computations, n being the number of TSsinvolved. Furthermore, according to the standard,the actual start of the service for the newly admittedTS can be deferred to a later time (which is con-veyed in the ADDTS response message). Thisallows the scheduler to take the time needed to pro-duce the new timetable.
The QAP does not need to compute a new time-table when a QSTA deletes one of its admitted TSs.In fact, it can be easily proved that any subset of aset of admitted TSs is also feasible. Therefore, theQAP can simply remove the entries related to thedeleted TS from the current timetable.
We conclude the section by discussing the storagecomplexity of RTH. The timetable consists of a listof entries hi,TXOPi, tii, whose number is upperbounded by
PidCi=�bieðH=T iÞ. The latter is obtained
by subtracting the upper bound from the number ofidle HCCA intervals from expression (7). Let us
assume, as a rough computation, that each entrycan be represented as follows: TS i as an 8-bit iden-tifier, which allows up to 256 TSs to be served by theQAP at the same time; the TXOP as an 8-bit field,expressed in multiples of 32 ls, as specified by thestandard; the start time of the TXOP ti as a 32-bitfield, in ls, which allows the schedule duration tobe more than 71 min. In this way, one entry requiresmerely 6 bytes. Given that APs are currentlyshipped with the main memories in the order ofmegabytes, the storage complexity of RTH is notan issue.
4. Performance evaluation
In this section we evaluate the performance ofRTH, in terms of the admission control limit ofHCCA traffic and of the channel capacity left fortraffic served via contention-based access functions,i.e., DCF and EDCA. First, we compare the admis-sion control limit of the RTH and sample schedul-ers, with different mixes of QoS TSs. This analysisis carried out using an ad-hoc computational tool.Then, we employ packet-level simulation to assessthe performance of contention-based traffic underdifferent patterns of VoIP models. For both RTHand the sample scheduler we report the results withand without the QAck feature.
4.1. System parameters and analysis tools
The physical layer parameters are those specifiedby the High Rate Direct Sequence Spread Spectrum(HR/DSSS) PHY [9], also known as 802.11b, andare reported in Table 2.
The results reported in Section 4.3 were obtainedwith a stand-alone C++ program, which emulatesthe behavior of the offline timetable computation

Table 2Evaluation MAC/PHY parameters
Parameter Value
SIFS (ls) 10PIFS (ls) 30DIFS (ls) 50SlotTime (ls) 20PHY header (ls) 192Data rate (Mb/s) 11Basic rate (Mb/s) 2Bit error rate (b/s) 0
Table 3Voice activity detection models for VoIP traffic flows
Type kON (s) kON kOFF (s) kOFF E[ON](s)
E[OFF](s)
M2M 2.184 0.435 3.093 0.455 5.86 7.47M2O 3.342 0.732 44.267 0.432 4.06 120.4O2M 23.952 1.278 3.941 0.820 22.2 4.39O2O 1.423 0.824 0.899 1.089 1.58 0.87
2320 C. Cicconetti et al. / Computer Networks 51 (2007) 2311–2325
algorithm and the HCCA admission control unit of802.11e, with both RTH and the sample scheduler.Those in Section 4.4 were obtained using the ns2
network simulator [12], where we implementedRTH and the sample scheduler using the HCCAimplementation framework described in [4]. Thesimulation was carried out using independent repli-cations [10]. Specifically, we ran a variable numberof independent replications of 600 s each, with a100 s initial warm-up period. In all the simulationruns, we estimated the 95% confidence interval foreach performance measure. Confidence intervalswere not drawn whenever negligible.
4.2. Traffic models and metrics
We considered two types of QoS traffic transmit-ted through HCCA: VoIP and videoconference.Both traffic types are bidirectional,3 thus QSTAsrequest the admission of an uplink and a downlinkTS at the same time. Data traffic, which possessesno specific QoS requirements, was transmitted usingDCF. Stations with data traffic operate in asymp-totic conditions, i.e., they always have a frame totransmit. The packet length of data traffic is con-stant and equal to 1500 bytes.
We simulated a VoIP stream of packets as anON/OFF source: during the ON (talkspurt) periodsthe traffic is CBR with parameters that depend onthe encoding scheme; during the OFF (silence) peri-ods no packets are generated. The encoding schemesthat we employed are [5] G.711, which generatespackets of 160 bytes (including IP/UDP/RTP head-ers) at a constant inter-arrival time of 20 ms, andG.723, which generates packets of 70 bytes (includ-ing IP/UDP/RTP headers) at a constant inter-arri-val time of 45.5 ms. For both encoding schemes,
3 The downlink and uplink traffic flows are not correlated.
we set the TSPEC delay bound to the packetinter-arrival time, the nominal SDU size to thepacket size, and the mean data rate to the peak rateduring talkspurts. Talkspurt and silence periodswere distributed according to Weibull distributions,so as to model four different types of conversations,as reported in Table 3 [2]: conference (i.e., many-to-many, M2M), lecture audience (i.e., many-to-one,M2O), lecture speaker (i.e., one-to-many, O2M),and two-way conversation (i.e., one-to-one, O2O).
We simulated videoconference traffic based on apre-encoded MPEG4 trace file [14], with an averagerate of 158 kb/s and a peak rate of 2.7 Mb/s. Thedelay bound of videoconference TSs was 100 ms,and the mean data rate the smallest rate such thatthe 95th percentile of the delay was smaller thanthe frame inter-arrival time. This was done assum-ing that the video stream was transmitted by anHCCA TS which is periodically granted a TXOPof fixed duration, with the period equal to the delaybound, i.e., 364 kb/s. Finally, the nominal SDU sizewas set equal to the MTU employed by the IPv4network layer, i.e., 1500 bytes.
According to the set of TSPEC parameters andthe traffic characterization, any VoIP SDU willexperience a delay lower than or equal to the packetinter-arrival time, whereas a videoconference SDUwill experience a delay lower than or equal to100 ms with probability 0.95.
Several metrics were defined to assess the perfor-mance of RTH. With regard to the admission con-trol analysis, we considered the number of TSsthat can be admitted, and the amount of channelcapacity that is not used by HCCA. The latter isdefined as the percentage of idle time within a sched-uling duration, and is derived from a schedulable setof TSs by applying the timetable computation algo-rithm in Fig. 3. The performance metrics of thepacket-level simulation analysis are the null rate,defined as the number of null messages sent in theunit of time, and the throughput of DCF traffic,which is the amount of bits correctly acknowledgedby the QAP in the unit of time.

Fig. 5. Admission control. Number of admitted VoIP G.723 TSsagainst the number of admitted VoIP G.711 TSs.
Fig. 6. Admission control. Number of admitted videoconferenceTSs against the number of admitted VoIP G.711 TSs.
C. Cicconetti et al. / Computer Networks 51 (2007) 2311–2325 2321
4.3. Admission control analysis
We first evaluated the performance of RTH interms of the admission control limit.4 Note thatthe admission control test for the sample schedulerdoes not take into account the presence of theQAck. However the admission control for RTHchanges if QAck is enabled, as shown in Fig. 3.
Fig. 5 shows the number of admitted VoIP G.723TSs as a function of the number of admitted VoIPG.711 TSs. Fig. 6 shows the number of admittedvideoconference TSs, as a function of the numberof admitted VoIP G.711 TSs. In both cases, thesample scheduler curve lies significantly below theRTH curve. This behavior confirms that the samplescheduler cannot efficiently accommodate TSs withdifferent TSPECs. In fact, firstly, it polls TSs withDi > SI more often than needed, by setting thescheduling duration to the smallest TS period. Sec-ondly, it overestimates the capacity needed by TSsbecause of the ceiling operator in Eq. (2). Withregards to mixed VoIP traffic only (i.e., Fig. 5),the RTH admission control limit does not changeif QAck is enabled. This is because the expectednumber of SDUs generated for each period is equalto one, for both G.711 and G.723 TSs. Therefore, inEq. (3) the value of pi is always one regardless of theQAck feature. This is not true with mixed VoIP andvideoconference traffic, where the latter is expectedto transmit many SDUs for each period. Hence theycan be preempted by TSs that have a higherdynamic priority at a given virtual time t in thetimetable computation. However, as can be seen inFig. 6, enabling QAck warrants a negligibleimprovement, i.e., at most one additional videocon-ference TS in only a few cases.
Even though the QAck has a negligible impact onthe HCCA admission control limit, enabling it canproduce a significant increase in the capacity avail-able for contention-based traffic. In Figs. 7 and 8we report an estimate of the lower bound of thiscapacity, by plotting the fraction of a schedule dura-tion that is not allocated to HCCA transmissions.Note that the actual capacity available for conten-tion-based traffic can only be evaluated throughpacket-level simulation, which we do in the nextsubsection. Our scenario has one VoIP G.711 TSand an increasing number of either VoIP G.723 or
Fig. 7. Unreserved HCCA capacity vs. number of VoIP G.723TSs, with one G.711 TS.
4 As already said in Section 2.2, no admission control test hasbeen derived for SETT-EDD. Therefore, it is not possible toinclude it in the comparison.

Fig. 8. Unreserved HCCA capacity vs. number of videoconfer-ence TSs, with one G.711 TS.
2322 C. Cicconetti et al. / Computer Networks 51 (2007) 2311–2325
videoconference TSs, respectively. In both cases, thesample scheduler reserves much more capacity thanRTH for HCCA transmissions. This is becauseVoIP G.723 TSs and videoconference TSs areunnecessarily polled with the same frequency asVoIP G.711 TSs, which have a shorter period(20 ms vs. 45.5 ms and 20 ms vs. 100 ms, respec-tively). Thus, the capacity available for conten-tion-based access with RTH is significantly higherthan that available with the sample scheduler.Moreover, enabling QAck further reduces the over-head of polling uplink TSs, thus saving more capac-ity for contention-based access. This is especiallytrue with mixed VoIP traffic (Fig. 7), whereas thecapacity improvement with mixed VoIP G.711 andvideoconference traffic is quite modest (at most 4%of channel capacity). This is because VoIP TSs havestringent delay requirements, i.e., short periods,with low rate requirements, i.e., small capacities.Therefore, polling is a critical overhead factor,which cannot be captured by pi in Eq. (3), whichassumes that each TS consumes at least one pollmessage during its period. Actually building thetimetable allows TXOPs to be concatenated so thatonly few TSs really need to be polled individually.Such an improvement is not achieved with mixedVoIP and videoconference traffic (Fig. 8) becausethe total number of TSs, and hence the number ofpoll messages needed, is smaller than that neededwith VoIP traffic.
Fig. 9. Throughput of DCF traffic with increasing periodduration of the HCCA schedule.
4.4. Packet-level simulation analysis
In this section we discuss the results obtainedthrough simulation. Firstly, we observe that RTHproduces timetables that are much more ‘‘frag-
mented’’ than those obtained with the sample sched-uler. This is because the sample scheduler selects acommon schedule duration, and allocates all theTXOPs back to back starting from the beginningof the schedule. On the other hand, RTH servesTSs based on their actual periods, which may be dif-ferent, and hence may generate schedules with many‘‘gaps’’ of capacity left for contention-based access(see Fig. 4). Thus, contention-based access func-tions, which in fact can access the channel in thosegaps only, may have to contend for medium accessin shorter intervals with RTH than with the samplescheduler. One might wonder whether this nega-tively affects the throughput of contention-basedtraffic. We now show via simulation that this isnot the case. We simulate a system where the QAPkeeps the channel busy periodically for a fixedamount of time. The HCCA service is thus com-pletely characterized by two parameters: the dura-tion of the HCCA period, and the ratio of thebusy HCCA interval to the HCCA period, calledd. We vary the period while keeping d constant, soas to vary the absolute duration of the gaps leftfor contention-based access functions. In Fig. 9 weshow the throughput of DCF traffic against theHCCA period, which is varied from 5 ms to 1 s.Results are reported in the case of d = 0.2, 0.5,0.8, and with a variable number of QSTAs (i.e., 1,5, and 10 QSTAs). As can be seen, in all cases thecurves are almost constant, i.e., the throughput ofDCF traffic does not depend significantly on howlarge the contention intervals are. This is because,according to the 802.11e standard, the QAP doesnot notify QSTAs of the forthcoming TXOP starttime. Therefore, even though idle HCCA intervals

Fig. 11. Throughput of DCF traffic with different VAD modelsfor VoIP HCCA TSs, with (w/) and without (w/o) the QAckmechanism.
C. Cicconetti et al. / Computer Networks 51 (2007) 2311–2325 2323
are smaller than the DCF/EDCA frame exchangesequence, QSTAs still initiate transmission. In thiscase, the TXOP start will be delayed until the frameexchange sequence is completed. Note that thethroughput of DCF traffic slightly decreases whenthe number of QSTAs increases, due to the increas-ing number of collisions.
To conclude our analysis, we compare RTH withthe sample scheduler, in terms of the DCF through-put carried with different Voice Activity Detection(VAD) models for VoIP TSs. The performance ofSETT-EDD depends on some TSPEC parameters,such as mSI and MBS. No criterion for selectingthese parameters has been specified in [7], nor canit be straightforwardly inferred from the trafficmodel employed. In fact, SETT-EDD is besttailored to serve bursty traffic, while the simulatedscenarios only involve CBR VoIP TSs. On the otherhand, with CBR traffic, the sample scheduler is astronger competitor, since it serves such traffic witha perfectly periodic schedule. The simulated sce-nario includes ten QSTAs, five with G.711 VoIPTS, the other five with G.723 VoIP TS; additionally,the QAP serves a QSTA with DCF traffic. All fourVAD models were considered separately.
In Fig. 10 we show the null rate of VoIP TSs. Ascan be seen, regardless of the VAD modelemployed, the null rate is almost the same in bothschedulers with G.711 TSs. This is because QSTAsadvertise a smaller delay bound for G.711 TSs thanfor G.723 TSs (i.e., 20 ms vs. 45.5 ms). Therefore, inboth RTH and the sample scheduler, the serviceperiod of G.711 TSs is equal to their packet inter-arrival time. In this case, null messages are onlydue to the silence periods. In fact, the lower the ratioof the average ON period over the average
Fig. 10. Null rate of VoIP TSs, with different VAD models.
ON + OFF period in Table 3, the higher the chancethat the QAP polls an idle TS, and hence the nullrate. However, the null rate with RTH is signifi-cantly smaller than it is with the sample schedulerwith G.723 TSs. This is because RTH polls themat the same pace of packet arrival, while the samplescheduler polls all TSs each 20 ms. Thus, besides theunavoidable contribution to the null rate due to thesilence periods, the sample scheduler adds a signifi-cant overhead because it polls G.723 TSs at a higherrate than the packet generation.
In Fig. 11 we compare the actual throughputachieved by DCF traffic, with and without QAck,in the same settings as above. The throughputof DCF traffic with RTH is higher than with thesample scheduler, due to the reduced overheadwhen polling G.723 TSs. Clearly, the throughputincreases when QAck is enabled in both schedulers.However, RTH alone outperforms the samplescheduler with QAck enabled. Furthermore,enabling the QAck entails a higher throughputincrease with the RTH scheduler than with the sam-ple scheduler.
5. Conclusions
In this paper we have presented RTH, a schedul-ing algorithm to provide real-time guarantees under802.11e HCCA. RTH applies to those context rulesthat are derived from EDF scheduling with the SRPpolicy. Moreover, it defines a procedure that mapsthe TSPEC parameters of TSs to those that arerequired to carry out the scheduling procedure. Thisis done to reduce the number of polls to uplink TSsfor each period, and hence the resource wastage.

2324 C. Cicconetti et al. / Computer Networks 51 (2007) 2311–2325
RTH is simple, in that complex operations are per-formed offline with respect to packet transmission,while scheduling decisions require a constant num-ber of operations compared to the number of admit-ted TSs.
We have evaluated the performance of RTH ana-lytically, using a stand-alone implementation of theadmission control algorithm and of the offline time-table computation procedure. We also assessed itthrough packet-level simulation, using ns2. In bothcases, we compared the results to those obtainedwith the sample scheduler. Our performance evalu-ation showed that (at least within the limits of theanalyzed scenarios) RTH is more efficient than thesample scheduler in terms of resource utilization.Not only can RTH admit more traffic, it also usescapacity sparingly, leaving more available for con-tention-based access functions. Furthermore, wehave shown that using the optional QAck featureprovides an effective means of reducing the pollingoverhead. While this yields little or no improvementon the admission control limit of HCCA traffic, itfurther increases the throughput of contention-based traffic. The increase, however, is larger withRTH than it is with the sample scheduler.
Acknowledgement
This study was carried out within the frameworkof the QUASAR project, funded by the Italian Min-
istry of Education, University and Research.
References
[1] T.P. Baker, Stack-based scheduling of real-time processes,Journal of Real-time Systems 3 (1) (1991) 67–100.
[2] Chen-Nee Chuah, R.H. Katz, Characterizing packet audiostreams from Internet multimedia applications, in: Proceed-ings of IEEE ICC 2002, New York, USA, April 28–May 2,2002, vol. 2, pp. 1199–2203.
[3] C. Cicconetti, L. Lenzini, E. Mingozzi, G. Stea, Efficientprovisioning of real-time QoS guarantees in IEEE 802.11eWLANs, in: Proceedings of European Wireless 2006, Ath-ens, Greece, April 2–5, 2005.
[4] C. Cicconetti, L. Lenzini, E. Mingozzi, G. Stea, A softwarearchitecture for simulating IEEE 802.11e HCCA, in: Pro-ceedings of IPS MoMe 2005, Warsaw, Poland, March 14–15,2005, pp. 97–104.
[5] Cisco Press, Traffic analysis for Voice over IP, November2001.
[6] D. Gao, J. Cai, K.N. Ngan, Admission control in IEEE802.11e wireless LANs, IEEE Network 19 (3) (2005) 6–13.
[7] A. Grilo, M. Macedo, M. Nunes, A scheduling algorithm forQoS support in IEEE 802.11e networks, IEEE WirelessCommunications 10 (3) (2003) 36–43.
[8] IEEE Std 802.11e Wireless LAN medium access control andphysical layer specifications, Medium access control qualityof service enhancements, 2005.
[9] IEEE Std 802.11 Part 11: Wireless LAN medium accesscontrol and physical layer specifications, 1999.
[10] A.M. Law, W.D. Kelton, Simulation Modeling and Anal-ysis, third ed., McGraw-Hill, 2000.
[11] C.L. Liu, J.W. Layland, Scheduling algorithms for multi-programming in a hard-real-time environment, Journal ofACM 20 (1) (1973) 46–61.
[12] http://www.isi.edu/nsnam/ns/.[13] N. Ramos, D. Panigrahi, S. Dey, Quality of service
provisioning in 802.11e networks: challenges, approaches,and future directions, IEEE Network 19 (3) (2005) 14–20.
[14] P. Seeling, M. Reisslein, B. Kulapala, Network performanceevaluation using frame size and quality traces of single-layerand two-layer video: a tutorial, IEEE CommunicationsSurveys and Tutorials 6 (2) (2004) 58–78.
[15] I. Shin, I. Lee, O. Sokolsky, Schedulability analysis withpreemption overhead, Tech. report MS-CIS-06-07, Univer-sity of Pennsylvania, 2006.
[16] J. Stankovic, K. Ramamritham, M. Spuri, G. Buttazzo,Deadline Scheduling for Real-time Systems, Kluwer Aca-demic Publishers, Boston, 1998.
Claudio Cicconetti graduated in Com-puter Systems Engineering from theUniversity of Pisa, Italy, in October2003. He is currently pursuing his PhDdegree at the same university. Hisresearch interests include Quality ofService in IEEE 802.16 and IEEE 802.11wireless networks, medium access con-trol protocols for mobile computing,wireless mesh networks. He is involvedin the EuQoS (End-to-end Quality of
Service support over heterogeneous networks) project, whichparticipates in the EU Information Society Technologies (IST)
Programme. He served as a member of the organizationcommittee for the international conference VALUETOOLS2006.Luciano Lenzini holds a degree in Physicsfrom the University of Pisa, Italy. Hejoined CNUCE, an institute of the Ital-ian National Research Council (CNR) in1970. In 1994 he joined the Departmentof Information Engineering of the Uni-versity of Pisa as a Full Professor. Hiscurrent research interests include thedesign and performance evaluation ofMAC protocols for wireless networksand the Quality of Service provision in
integrated and differentiated services networks. He is currently onthe Editorial Boards of Computer Networks and the Journal of
Communications and Networks. He served as chairman for the1992 IEEE Workshop on Metropolitan Area Networks and forthe 2002 European Wireless (EW2002) conference. He hasdirected several national and international projects in the area ofcomputer networking.
r Networks 51 (2007) 2311–2325 2325
Enzo Mingozzi has been an associateprofessor at the Faculty of Engineering
of the University of Pisa, Italy, sinceJanuary 2005. He received a Laurea(cum laude) degree and a PhD in Com-puter Systems Engineering in 1995 and2000, respectively, from the University ofPisa. His research activities span severalareas, including design and performanceevaluation of multiple access protocolsfor wireless networks, QoS provisioningand service integration in IP networks. He has been involved inseveral national (FIRB, PRIN) and international (Eurescom,
C. Cicconetti et al. / Compute
IST) projects, as well as research projects supported by privateindustries (Telecom Italia Lab, Nokia). He actively took part inthe standardization process of HIPERLAN/2 and HIPERAC-CESS networks, in the framework of the ETSI project BRAN(Broadband Radio Access Networks). He has served on theTechnical Program Committee of several international confer-ences. He served as the Tutorial Chair for the European Wireless2002 (EW2002) Conference Committee, and guest-edited a spe-
cial issue of the Wireless Networks journal on selected papersfrom EW2002.
Giovanni Stea is an assistant professor(Ricercatore) at the Department ofInformation Engineering of the Univer-sity of Pisa. His current research focus isdesign and performance evaluation ofcomputer networks. He has coauthoredseveral international publications andinternational patents. He has been andis involved in national and Europeanresearch projects, such as IST WINE-GLASS, Wireless IP NEtwork as a
Generic platform for Location Aware Service Support, and ISTEuQoS, End-to-end Quality of Service support over heteroge-
neous networks. He has served as a Member of the TechnicalProgram Committee and/or Organization Committee for sev-eral international conferences, including European Wireless,VALUETOOLS and SIGCOMM.