
DESENVOLVIMENTO E IMPLEMENTAÇÃO DE UM SISTEMA …
138
DESENVOLVIMENTO E IMPLEMENTAÇÃO DE UM SISTEMA DE AUTOMAÇÃO DE UMA MAQUETE DE ELEVADOR DE DOIS PAVIMENTOS Erick Gama Antunes Norat Projeto de Graduação apresentado ao Curso de Engenharia Elétrica da Escola Politécnica, Universidade Federal do Rio de Janeiro, como parte dos requisitos necessários à obtenção do título de Engenheiro. Orientador: Marcos Vicente de Brito Moreira Rio de Janeiro Março de 2020
Transcript of DESENVOLVIMENTO E IMPLEMENTAÇÃO DE UM SISTEMA …

DESENVOLVIMENTO E IMPLEMENTAÇÃO DE UM SISTEMA DE
AUTOMAÇÃO DE UMA MAQUETE DE ELEVADOR DE DOIS PAVIMENTOS
Erick Gama Antunes Norat
Projeto de Graduação apresentado ao Curso
de Engenharia Elétrica da Escola Politécnica,
Universidade Federal do Rio de Janeiro, como
parte dos requisitos necessários à obtenção do
título de Engenheiro.
Orientador: Marcos Vicente de Brito Moreira
Rio de Janeiro
Março de 2020

ii
DESENVOLVIMENTO E IMPLEMENTAÇÃO DE UM SISTEMA DE
AUTOMAÇÃO DE UMA MAQUETE DE ELEVADOR DE DOIS PAVIMENTOS
Erick Gama Antunes Norat
PROJETO DE GRADUAÇÃO SUBMETIDO AO CORPO DOCENTE DO CURSO
DE ENGENHARIA ELÉTRICA DA ESCOLA POLITÉCNICA DA
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS
REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE
ENGENHEIRO ELECTRICISTA.
Examinado por:
RIO DE JANEIRO, RJ - BRASIL
MARÇO DE 2020

iii
Norat, Erick Gama Antunes
Desenvolvimento e implementação de um sistema de automação de
uma maquete de elevador de dois pavimentos / Erick Gama Antunes
Norat. -Rio de Janeiro: UFRJ/ Escola Politécnica, 2020
XV, 140 p.: il.; 29,7 cm
Orientador: Marcos Vicente de Brito Moreira
Projeto de Graduação – UFRJ/ Escola Politécnica/ Curso de
Engenharia Elétrica, 2020.
Referências Bibliográficas: p. 138 - 140.
1. Elevador. 2. Inversor de Frequência. 3. Controlador Lógico
Programável. 4. GRAFCET. I. Moreira, Marcos Vicente de Brito.
II. Universidade Federal do Rio de Janeiro, Escola Politécnica, Curso de
Engenharia Elétrica. III. Título.

iv
Freedom will destroy itself if it is
not exercised within some sort of
moral framework, some body of
shared beliefs, some spiritual
heriTAGe transmitted through the
Church, the family and the
school."
Margaret Thatcher

v
Agradecimentos
Sou eternamente grato a Deus por ter me dado forças para seguir no caminho correto e
superado todas as dificuldades em minha vida. Meu percurso na faculdade não foi
diferente, repleto de desafios exaustivos que, muito embora eu tenha sentido vontade de
desistir, persisti e pude superá-los e aprender muito com eles.
Certamente foi Deus que colocou as pessoas mais maravilhosas em minha vida, minha
família, para sempre me proporcionar fonte infinita de energia positiva para eu ter sempre
vontade de sorrir e caminhar adiante. Obrigado mesmo mãe, pai, vó, vô e mano por
estarem sempre próximos a mim.
Quero agradecer a todos os meus amigos mais próximos, amizades que quero levar para
sempre, Pablo, Felipe, Estêvão, Geraldo, Antônio, Juliana, Dona Miriam, Seu Carlos
Alberto, Yan, Alexandre, Matheus, Matheus (são dois Matheuses), Hugo, Leandro,
Edgard, Erenilton, João Pedro e Marco Antônio. Claro que há muitos outros e se você
não achou seu nome aqui, me procura depois que eu agradeço pessoalmente.
Obviamente sou grato por todos os professores, orientadores, funcionários e
responsáveis que tive a oportunidade de encontrar na faculdade e que me instruíram e me
deram o conhecimento para eu possa um dia vir a executar minha futura profissão de
engenheiro. Obrigado professor Marcos por ter me orientado, o senhor é um excelente
professor. Obrigado também João Pedro que me auxiliou a construir a maquete do
elevador, esse trabalho só foi possível devido a sua ajuda.
Finalmente acabei, consegui concluir mais uma etapa na vida e me tornar engenheiro
Electricista, espero concluir mais etapas e continuar a viver essa vida feliz.

vi
Resumo do Projeto de Graduação apresentado à Escola Politécnica/ UFRJ como parte dos
requisitos necessários para a obtenção do grau de Engenheiro Electricista.
DESENVOLVIMENTO E IMPLEMENTAÇÃO DE UM SISTEMA DE
AUTOMAÇÃO DE UMA MAQUETE DE ELEVADOR DE DOIS PAVIMENTOS
Erick Gama Antunes Norat
Março/2020
Orientador: Marcos Vicente de Brito Moreira
Curso: Engenharia Elétrica
Este trabalho apresenta de forma didática a construção de uma maquete de elevador
de dois pavimentos que simula, com boa semelhança à realidade, o funcionamento de
um elevador real de passageiros e a instalação de um sistema automatizado utilizando
CLP (Controlador Lógico Programável) que controla todo o sistema de elevação. A
maquete apresenta também um motor de indução, como máquina de tração, acionado
por inversor de frequência da marca WEG.
Foi criado um GRAFCET Global que representa o comportamento sequencial do
sistema de elevação e um método de conversão de GRAFCET para diagrama ladder foi
adaptado do método proposto por Moreira e Basílio (2013) para ser executado pelos
CLPs da Schneider Electric.
Palavras-chave: Elevador, Inversor de Frequência, Controlador Lógico Programável,
GRAFCET.

vii
Abstract of Undergraduate Project presented to POLI/ UFRJ as a partial fulfillment of the
requirements for the degree of Engineer.
DEVELOPMENT AND IMPLEMENTATION OF AN AUTOMATION SYSTEM
FOR A TWO-PAVEMENT ELEVATOR MODEL
Erick Gama Antunes Norat
March/2020
Advisor: Marcos Vicente de Brito Moreira
Course: Electrical Engineering
This work presents, in a constructive and didactic form a two floor elevator model that
simulates, with reasonable accuracy to reality, the operation of a real passenger based
elevator and the implementation of an automatic system utilizing PLC (Programmable
Logic Controller) which controls the whole elevation process. The model is also
composed by an induction motor, as a traction machine, driven by a frequency inverter
from WEG.
A Global GRAFCET, that represents the sequential behavior of the elevation system,
was built and a method of conversion from GRAFCET to ladder diagram was adapted
from the method proposed by Moreira and Basílio (2013) to be executed by the PLCs of
Schneider Electric.
Keywords: Elevator, Frequency Inverter, Programmable Logic Controller, GRAFCET.

viii
Sumário
Lista de Figuras .............................................................................................................. xii
Lista de Tabelas ............................................................................................................. xvi
1. Introdução ................................................................................................................ 1
1.1. Motivação .......................................................................................................... 1
1.2. Objetivo ............................................................................................................. 1
1.3 Organização do Trabalho ................................................................................... 2
2. Fundamentos Teóricos ............................................................................................ 4
2.1. GRAFCET ......................................................................................................... 4
Termos e definições .................................................................................... 4
Representação de um GRAFCET ............................................................... 5
Sintaxe do GRAFCET ................................................................................ 5
Evolução do GRAFCET ............................................................................. 5
Situação Inicial ........................................................................................... 6
Transposição de uma Transição ................................................................. 6
Evolução das Etapas Ativas ........................................................................ 6
Evoluções Simultâneas ............................................................................... 6
Ativação e Desativação Simultânea de uma Etapa ..................................... 6
Eventos de Entrada ................................................................................. 7
Eventos Internos ..................................................................................... 7
Evento Interno Descrito pela Ativação de uma Etapa ............................ 7
Evento Interno Descrito pela Desativação de uma Etapa ....................... 7
Evento Interno Descrito pela Transposição de uma Transição ............... 7
Modos de Saída ....................................................................................... 8
Modo Contínuo ....................................................................................... 8
Modo Memorizado ................................................................................. 8

ix
Evolução não-Transitória ........................................................................ 8
Evolução Transitória ............................................................................... 9
Consequência da Evolução Transitória no Modo Contínuo ................. 10
Consequência da Evolução Transitória no Modo Memorizado ............ 10
GRAFCET Conexo ............................................................................... 11
GRAFCET Parcial ................................................................................ 11
Uso de Ordem de Forçamento de GRAFCET Parcial .......................... 12
Representação Gráfica dos Elementos de GRAFCET .......................... 13
2.2. Inversor de Frequência ..................................................................................... 18
2.2.1. Controle Escalar V/f ................................................................................. 19
2.2.2. Controle V/f em Malha Aberta ................................................................. 21
2.2.3. Controle Escalar V/f do Inversor de Frequência da WEG, Modelo
CFW300 .................................................................................................................. 21
2.2.4. Características do Inversor de Frequência da WEG, Modelo CFW300 ... 22
2.3. Circuito Ponte H .............................................................................................. 23
2.4. Controladores Lógicos Programáveis (CLP) ................................................... 25
2.5. Diagrama Ladder usado pelo Zelio soft 2 da Schneider Electric ..................... 26
2.5.1. Contatos .................................................................................................... 27
2.5.2. Bobinas ..................................................................................................... 28
2.5.3. Temporizadores ........................................................................................ 29
2.5.4. Bloco de Texto ......................................................................................... 31
2.6. Conversão do GRAFCET para Ladder ............................................................ 32
2.6.1. Módulo de inicialização............................................................................ 33
2.6.2. Módulo de Eventos Externos .................................................................... 34
2.6.3. Módulo das Condições ............................................................................. 34
2.6.4. Módulo da Dinâmica ................................................................................ 35
2.6.5. Módulo das Ações .................................................................................... 36

x
3. Construção da maquete com base em aspectos construtivos de um elevador de
passageiro ...................................................................................................................... 37
3.1. Aspectos Construtivos Gerais de Elevador de Passageiro ............................... 37
3.1.1. Cabos de aço e circuito de emergência ..................................................... 38
3.1.2. Sistema de Freio ....................................................................................... 41
3.1.3. Máquina de Tração ................................................................................... 43
3.1.4. Portas de Pavimentos e de Cabina ............................................................ 43
3.1.5. Sistema de Automação de Elevadores ...................................................... 46
3.2. Aspecto Construtivo da Maquete do Elevador de Passageiros ........................ 52
3.2.1. Máquina de tração .................................................................................... 53
3.2.2. Freio Eletromecânico ................................................................................ 54
3.2.3. Cabo de Aço ............................................................................................. 57
3.2.4. Cabina ....................................................................................................... 58
3.2.5. Porta de Cabina ......................................................................................... 59
3.2.6. Trilhos ....................................................................................................... 60
3.2.7. Sensores Magnéticos e Imãs ..................................................................... 61
3.2.8. Sensores Mecânicos de Fim de Curso ...................................................... 62
3.2.9. Painel de botões ........................................................................................ 63
3.2.10. Fontes CC ............................................................................................. 65
3.2.11. Inversor de Frequência da WEG, CFW300 .......................................... 67
3.2.12. Controladores Lógicos Programáveis da Schneider Electric ................ 74
4. Modelagem ............................................................................................................. 77
4.1. Circuito de inspeção ......................................................................................... 79
4.2. Circuito de porta .............................................................................................. 83
4.3. Circuito Principal ............................................................................................. 89
4.4. Conversão de GRAFCET para Diagrama Ladder ........................................... 97
4.4.1. Módulo da Inicialização ........................................................................... 98

xi
4.4.2. Módulo dos Eventos Externos ................................................................ 100
4.4.3. Módulo das Condições ........................................................................... 102
4.4.4. Módulo da Dinâmica .............................................................................. 105
4.4.5. Módulo das Ações .................................................................................. 109
4.4.6. Conversão de Ordem de Forçamento em Diagrama Ladder .................. 112
5. Validação e discussões ......................................................................................... 115
5.1. Teste no modo simulação do programa Zelio soft 2 ...................................... 115
5.2. Teste na Maquete do Elevador ....................................................................... 118
6. Conclusão ............................................................................................................. 119
Referências Bibliográficas ......................................................................................... 120

xii
Lista de Figuras
Figura 1 - Estrutura e Interpretação de um GRAFCET que representa o comportamento
sequencial de um sistema genérico. .................................................................................. 5
Figura 2 - Evolução não-transitória. ................................................................................. 9
Figura 3 - Evolução transitória. ........................................................................................ 9
Figura 4 - Presença de ação contínua em uma evolução transitória. .............................. 10
Figura 5 - Presença de uma ação memorizada em uma evolução transitória. ................ 11
Figura 6 - GRAFCET conexo. ........................................................................................ 11
Figura 7 - GRAFCET global formado pelos GRAFCETs parciais G1 e G2. ................ 12
Figura 8 - Ordens de forçamento. ................................................................................... 12
Figura 9 - Senóide modificada genérica em vermelho e sua componente fundamental
filtrada em azul. .............................................................................................................. 18
Figura 10 - Circuito eletroeletrônico de um inversor de frequência............................... 18
Figura 11 - Circuito equivalente de um motor de indução. ............................................ 20
Figura 12 - Controle escalar V/f malha aberta [10]. ....................................................... 21
Figura 13 - Controle escalar V/f do inversor de frequência CFW300............................ 22
Figura 14 - Dados de placa do inversor de frequência CFW300.................................... 23
Figura 15 - Borne do inversor de frequência CFW300. ................................................. 23
Figura 16 - Dois tipos de circuitos ponte H. Na Figura 16a) o circuito mais usual e na
Figura 16b) o circuito escolhido para o projeto. ............................................................. 24
Figura 17 - CLP controlando abertura de portas de um elevador. .................................. 25
Figura 18 - Programa Zelio soft 2 da Schneider Electric. ............................................... 27
Figura 19 - Contatos NA e NF presentes no software usado. ........................................ 27
Figura 20 - Entradas digitais, contatos e bobinas auxiliares e saídas digitais presentes no
software. ......................................................................................................................... 28
Figura 21 - Tipos de bobinas existentes no software...................................................... 28
Figura 22 - Tipos de temporizadores presentes no software. ......................................... 30
Figura 23 - Contatos e bobinas dos temporizadores. ...................................................... 30
Figura 24 - Contatos e bobinas do temporizador T2. ..................................................... 31
Figura 25 - Bobinas da função bloco de texto. ............................................................... 32
Figura 26 - Configuração de um bloco de texto. ............................................................ 32
Figura 27 - Modo da inicialização. ................................................................................. 33
Figura 28 - Modo de eventos externos. Detecção de borda de subida de um sinal. ....... 34

xiii
Figura 29 - Modo das condições..................................................................................... 35
Figura 30 - Modo da dinâmica. ...................................................................................... 35
Figura 31 - Modo das ações. ........................................................................................... 36
Figura 32 – Acima, os cabos de aço ligados à máquina de tração e abaixo, os cabos de
aço presos à cabina. ........................................................................................................ 38
Figura 33 - Regulador de velocidade para sistema de emergência do elevador em
manutenção. .................................................................................................................... 39
Figura 34 - Modelos de reguladores de velocidade para elevadores vendidos pela Casa
do Elevador, distribuidor exclusivo Elevatec [15]. ........................................................ 39
Figura 35 - À esquerda, limite final inferior e à direita, o tipo de fim de curso usado... 40
Figura 36 - Máquina de tração do sistema de elevação em manutenção e seu freio
eletromecânico. ............................................................................................................... 41
Figura 37 - Quadro de comando para elevador [16]. ...................................................... 42
Figura 38 - Operador de portas. ...................................................................................... 44
Figura 39 - Rampa articulada do operador de porta e sensores elétricos presentes nas
portas de pavimentos. ..................................................................................................... 45
Figura 40 - Hastes de ferro na imagem à esquerda e sensores magnéticos à direita. ..... 51
Figura 41 - Curva de velocidade..................................................................................... 52
Figura 42 - Maquete do elevador construída. ................................................................. 53
Figura 43 - Motor de indução usado como máquina de tração e dados de placa. .......... 54
Figura 44 - Freio eletromecânico da maquete do elevador. ........................................... 55
Figura 45 - Força magnética, força da mola e seus respectivos braços de alavanca para
cálculo dos torques. ........................................................................................................ 55
Figura 46 - Cabo de aço enrolado ao eixo torneado. ...................................................... 57
Figura 47 - Confecções de cabos de aço e tabela com especificações [18].................... 58
Figura 48 - A cabina da maquete. ................................................................................... 58
Figura 49 - Porta da cabina da maquete e ponte H. ........................................................ 59
Figura 50 - Sensores magnéticos da porta da maquete. .................................................. 60
Figura 51 – Trilhos, roldanas e sensores magnéticos. .................................................... 61
Figura 52 - Sensores magnéticos usados na maquete. .................................................... 61
Figura 53 – Tipo de sensor fim de curso usado para limite superior e inferior. ............. 63
Figura 54 - Painel de botões da maquete. ....................................................................... 63
Figura 55 - Fonte de 24 Vcc. .......................................................................................... 65
Figura 56 - Fonte CC de 5 Vcc. ...................................................................................... 65

xiv
Figura 57 - Inversor de frequência modelo CFW300A07P3S2NB20. ........................... 67
Figura 58 - Configuração PNP. ...................................................................................... 68
Figura 59 - Parâmetros de multispeed. ........................................................................... 69
Figura 60 - Relé do freio eletromecânico. ...................................................................... 70
Figura 61 - Curva V/F parametrizada [12]. .................................................................... 72
Figura 62 - Funcionamento do inversor na frenagem CC [12]. ..................................... 73
Figura 63 - Os dois CLPs modelo SR2D101BD. ........................................................... 74
Figura 64 - CLP modelo SR2B202BD. .......................................................................... 75
Figura 65 - Circuito geral do sistema de automação proposto para a maquete com os
circuitos de controles simplificados. .............................................................................. 77
Figura 66 - GRAFCETs parciais G1 e G4 que representam o circuito de inspeção. ..... 78
Figura 67 - GRAFCETs parciais G2 e G5 que controlam o circuito de porta. .............. 78
Figura 68 - GRAFCETs parciais G3 e G6 que controlam o circuito principal. ............. 79
Figura 69 - Circuito de inspeção..................................................................................... 80
Figura 70 - GRAFCET parcial G1. ................................................................................ 81
Figura 71 - GRAFCET parcial G4. ................................................................................ 83
Figura 72 - Circuito de porta. ......................................................................................... 84
Figura 73 - GRAFCET parcial G2. ................................................................................ 85
Figura 74 - Parte do GRAFCET parcial G2 que simula defeito de porta. ...................... 87
Figura 75 - GRAFCET parcial G5. ................................................................................ 88
Figura 76 - Circuito principal. ........................................................................................ 89
Figura 77 - GRAFCET parcial G3. ................................................................................ 91
Figura 78 - Curva de velocidade da maquete. ................................................................ 92
Figura 79 - Parte do GRAFCET parcial G3 que simula defeito de porta. ...................... 96
Figura 80 - GRAFCET parcial G6. ................................................................................ 97
Figura 81 – As bobinas não podem ser repetidas. .......................................................... 98
Figura 82 - Módulo da inicialização do circuito de inspeção. ........................................ 99
Figura 83 - Módulo da inicialização do circuito de porta. .............................................. 99
Figura 84 - Módulo da inicialização do circuito principal. .......................................... 100
Figura 85 - Módulo dos eventos externos do circuito de inspeção. ............................. 100
Figura 86 - Módulo dos eventos externos do circuito de porta. ................................... 101
Figura 87 - Módulo dos eventos externos do circuito principal. .................................. 101
Figura 88 - Módulo das condições do circuito de inspeção. ........................................ 102
Figura 89 - Módulo das condições do circuito de porta. .............................................. 104

xv
Figura 90 - Módulo das condições do circuito principal. ............................................. 105
Figura 91 - Módulo da dinâmica do circuito de inspeção. ........................................... 106
Figura 92 - Módulo da dinâmica do circuito de porta. ................................................. 107
Figura 93 - Módulo da dinâmica do circuito principal parte 1/2. ................................. 108
Figura 94 - Módulo da dinâmica do circuito principal parte 2/2. ................................. 109
Figura 95 - Módulo das ações do circuito de inspeção. ............................................... 110
Figura 96 - Módulo das ações do circuito de porta. ..................................................... 110
Figura 97 - Módulo das ações do circuito principal. .................................................... 111
Figura 98 - As duas ações armazenadas sendo "setadas" no módulo das ações e sendo
"resetadas" no módulo das condições. .......................................................................... 112
Figura 99 - Conversão da ordem de forçamento G1INIT em diagrama ladder. ...... 113
Figura 100 - Conversão da ordem de forçamento G2INIT em diagrama ladder. .... 114
Figura 101 - Conversão da ordem de forçamento G3INIT em diagrama ladder. .... 114
Figura 102 – Simulação do modo de inspeção começando com a porta da cabina já
fechada. ......................................................................................................................... 115
Figura 103 – Botões para modo simulação do programa Zelio soft 2. ......................... 116
Figura 104 - Entradas I2 e I6 verdadeiras fazendo a saída Q2 verdadeira. .................. 116
Figura 105 – Entradas I4 e I6 verdadeiras fazendo a saída Q3 verdadeira. ................. 117
Figura 106 – Entradas I5 e I6 fazendo a saída Q4 verdadeira. ..................................... 117
Figura 107 – Transferência do ladder do computador para os CLPs. .......................... 118

xvi
Lista de Tabelas
Tabela 1- Símbolos de GRAFCET e suas descrições..................................................... 13
Tabela 2 - Informações de entrada enviadas ao quadro de comando. ............................ 46
Tabela 3 - Ações de saída enviadas pelo quadro de comando........................................ 50
Tabela 4 - Sensores magnéticos e suas funções. ............................................................ 62
Tabela 5 - Botões da maquete e suas funções. ............................................................... 64
Tabela 6 - Carga exigida pelos dois CLPs SR2D101BD. .............................................. 66
Tabela 7 - Carga exigida pelo CLP SR2B202BD e pelo inversor de frequência
CFW300. ........................................................................................................................ 66
Tabela 8 - Carga exigida pelo relé do freio eletromecânico e por duas ventoinhas. ...... 66
Tabela 9 - Parâmetros do motor inseridos no inversor de frequência. ........................... 69
Tabela 10 - Funções dos bornes do inversor de frequência. ........................................... 70
Tabela 11 - Parametrização das velocidades da maquete. .............................................. 71
Tabela 12 - Parametrização dos tempos de aceleração e desaceleração. ........................ 71
Tabela 13 - Parâmetros de frenagem CC. ....................................................................... 72
Tabela 14 - Características gerais dos CLPs SR2D101BD. ........................................... 75
Tabela 15 - Características gerais do CLP SR2B202BD. .............................................. 76
Tabela 16 - Variáveis de entrada e saída do circuito de inspeção. ................................. 80
Tabela 17 - Variáveis de entrada e saída do circuito de porta. ....................................... 84
Tabela 18 - Variáveis de entrada e saída do circuito principal. ...................................... 89
Tabela 19 - Receptividades das transições t20, t21, t29 e t30. ....................................... 93

1
1. Introdução
1.1. Motivação
O fato de um elevador de passageiros ser um dos meios de transportes mais seguro e,
talvez, o mais utilizado e difundido no planeta motiva qualquer engenheiro Electricista a
estudar como funciona um sistema de elevação. Aplicar os conhecimentos adquiridos
durante a graduação e estudar, compreender e aplicar as grandezas físicas e técnicas
utilizadas nos elevadores é gratificante e motivante para qualquer profissional da área
técnica.
Segundo o Diário Oficial de São Paulo de 2012 [1], a prefeitura de São Paulo vinha
registrando elevadores desde 1930, e já havia 68 mil elevadores registrados na época.
Anualmente eram realizadas 4,2 trilhões de viagens em elevadores com índices de
acidentes próximos a zero, transportando mais de 25 milhões de pessoas por dia na capital
paulista, número oito vezes maior de passageiros transportados por ônibus, segundo o
Sindicato das Empresas de Elevadores do Estado de São Paulo. Ainda, segundo o
sindicato, mais de 300 mil elevadores estão em operação no Brasil. Atualmente esses
números estão ainda maiores.
Elevador é um equipamento que transporta objetos ou pessoas verticalmente ou
diagonalmente. O primeiro elevador foi construído por Arquimedes, antigo matemático
grego, em 236 a.C. e esse feito foi registrado nas obras do engenheiro e arquiteto Vitrúvio
150 anos depois, no século I a.C. Consistia em um sistema de carga vertical composto
por um conjunto de roldanas movidas por força humana, animal, ou água [2].
Em 1854, o americano Elisha Graves Otis cria um dispositivo de segurança que atua
caso haja rompimento dos cabos que sustentam a cabina do elevador (cabina é a estrutura
que transporta os passageiros). Um dispositivo que acoplava uma mola resistente de aço
preso à cabina que engrenava com uma catraca caso o cabo se rompesse. Esse feito
viabilizou a construção de elevadores muito mais seguros capazes de mudar o mundo,
fazendo as cidades crescerem verticalmente [2], [3].
Hoje, com o avanço tecnológico, elevadores cada vez mais rápidos, confortáveis, com
bom funcionamento e melhores sistemas de automação e segurança são construídos ao
redor de todo o mundo.
1.2. Objetivo
O objetivo desse trabalho é a construção de uma maquete de um elevador de dois
pavimentos que simule, com boa semelhança à realidade, o funcionamento de um
elevador real de passageiros; a instalação de um sistema automatizado utilizando

2
controladores lógicos programáveis (CLPs) que controle todo o sistema de elevação; além
disso, como se propõe usar um motor de indução como máquina de tração da cabina,
optou-se pela utilização de um inversor de frequência para acionar esse motor de indução
através de controle escalar V/f.
Vale ressaltar que a maquete não apresenta tudo que existe em um elevador real, já
que isso seria complexo demais para realizar nesse trabalho, o que não impede de, em
trabalhos futuros, mais estruturas e componentes serem adicionados. O intuito é que tenha
algumas características presentes em um elevador e que funcionem de acordo com a
realidade. Por exemplo, a maquete apresentará: cabina, máquina de tração (motor de
indução), freio eletromecânico, cabo de aço, porta de cabina, trilhos, sensores, botões,
além de três CLPs e um inversor de frequência. E como a maquete deve operar:
• realizar inspeção assim que o sistema for ligado
• atender chamadas e memorizar chamadas
• cabina só se move com porta fechada
• cabina abre e fecha porta somente quando alinhada ao pavimento
• freio eletromecânico abre quando energizado
• freio eletromecânico opera quando desenergizado
• em caso de emergência, freio deve atuar
• botão abrir porta simula uma emergência durante movimento
• limites superior e inferior deve evitar colisão no teto e fundo da maquete
• botão emergência simula uma emergência
• realizar inspeção após cada emergência
Para fazer o sistema automatizado, primeiramente será feito um GRAFCET global do
sistema de elevação da maquete. Alguns projetos de graduação, como [4], [5], já se
propuseram a criar um sistema de automação para elevador de passageiro usando Redes
de Petri Interpretadas para Controle, formalismo ligeiramente semelhante ao GRAFCET
usado neste trabalho. Em seguida, esse GRAFCET será convertido para diagrama ladder,
utilizando um método de conversão baseado no método proposto em [6]. E assim, o
ladder será implementado em três CLPs da Schneider Electric que irão controlar todo o
funcionamento do sistema da maquete.
O acionamento do motor de indução será feito por um inversor de frequência da WEG,
modelo CFW300, utilizando um controle escalar V/f (controle apropriado para cargas
onde o torque não varia), que receberá sinais de controle dos CLPs e enviará sinais de
controle para acionar o motor e o freio eletromecânico.
1.3 Organização do Trabalho
O trabalho foi organizado em seis capítulos.

3
No Capítulo 1 é apresentada a introdução, mostrando a motivação para o estudo sobre
sistemas de elevação e o objetivo do trabalho a ser realizado.
No Capítulo 2 os fundamentos teóricos estudados que dão base para esse trabalho são
apresentados. São abordados os fundamentos de GRAFCET, inversor de frequência,
circuito ponte H, controladores lógicos programáveis (CLP), programação em diagrama
ladder do software Zelio soft 2 e a conversão do GRAFCET para ladder.
No Capítulo 3 primeiramente, são apresentadas todas as características de um elevador
de passageiro, todos os componentes e seus funcionamentos seguindo a norma NBR NM
207:1999 [7]. Em seguida será detalhado tudo que estará presente na maquete, conforme
o objetivo desse trabalho, tentando ser o mais fidedigno possível com um sistema de
elevação real.
No Capítulo 4 é obtido o modelo do sistema de automação. Trata-se da confecção do
GRAFCET que descreve o comportamento proposto para o sistema de elevação da
maquete e a converção do GRAFCET para diagrama ladder.
No Capítulo 5 é realizada a validação da modelagem que consiste em verificar se o
sistema está sendo controlado de forma correta. Essa verificação será primeiramente feita
com o modo simulação do software Zelio soft 2 e, em seguida, testado na planta,
interagindo com a maquete como se ela fosse um elevador de passageiro real. Caso o
comportamento esteja correto, a modelagem é válida.
No Capítulo 6 é apresentada a conclusão, mostrando as considerações finais e falando
do aprendizado adquirido, além de indicar trabalhos futuros, incentivando outros estudos
e projetos que podem ser realizados a partir desse.

4
2. Fundamentos Teóricos
2.1. GRAFCET
Neste capítulo serão abordados, de forma objetiva, os principais fundamentos teóricos
que definem a linguagem GRAFCET, segundo a norma IEC 60848:2002 [8]. Esta norma
define GRAFCET como uma linguagem que descreve de forma funcional o
comportamento sequencial de um sistema de controle.
Termos e definições
Os termos e definições, segundo a norma IEC 60848:2002 [8], para essa linguagem
serão listados abaixo.
Ação: elemento associado a uma etapa, indicando uma atividade a ser realizada nas
variáveis de saída.
Arco: elemento que indica o caminho da etapa para transição ou da transição para
etapa.
Evento de entrada/Input: evento caracterizado pela mudança de, pelo menos, um
valor de todas as variáveis de entrada do sistema.
Evento interno: evento caracterizado pela associação de um evento de entrada com
uma situação do sistema.
Situação: nome do estado do sistema, descrito por GRAFCET, caracterizado pelas
etapas ativas em um dado instante.
Etapa: elemento usado para a definição do estado da parte sequencial do sistema. Uma
etapa pode estar ativa ou inativa.
Estrutura: parte do GRAFCET que permite descrever a possível evolução entre
situações.
Evolução transitória: evolução caracterizada pela transposição de várias transições
sucessivas na ocorrência de um único evento de entrada/input.
Transição: elemento que indica uma evolução possível de uma atividade entre duas
ou mais etapas.
Receptividade de transição: elemento associado com a transição que indica o
resultado de uma expressão booleana. A condição pode ser verdadeira ou falsa.
Interpretação: parte do GRAFCET que permite a ligação entre:
- As variáveis de entrada e a estrutura, por meio da receptividade de transição.
- As variáveis de saída e a estrutura, por meio das ações.

5
Representação de um GRAFCET
Um GRAFCET é uma representação gráfica e sintética de uma parte sequencial do
comportamento de um sistema. A Figura 1 mostra a estrutura de um GRAFCET genérico,
sua interpretação, as variáveis de entrada e de saída.
Figura 1 - Estrutura e Interpretação de um GRAFCET que representa o
comportamento sequencial de um sistema genérico.
Sintaxe do GRAFCET
A alternância entre etapa/transição e transição/etapa deve sempre ser respeitada não
importa qual seja a sequência do sistema. Assim, duas etapas nunca devem estar ligadas
diretamente só por um arco, isto é, o arco deve sempre ligar uma etapa a uma transição e
uma transição a uma etapa.
Evolução do GRAFCET
Cada situação é caracterizada pelo conjunto de etapas ativas em um dado instante. A
regra de evolução do GRAFCET somente afeta a aplicação, nas etapas, à medida que as
situações evoluem em uma sequência do sistema.

6
Situação Inicial
A situação inicial é a situação no instante inicial. É descrito pelo conjunto de etapas
ativas no instante inicial. A escolha para a situação inicial, depende do projetista, e da
metodologia relacionada ao tipo de sequência considerada.
Transposição de uma Transição
A transposição de uma transição ocorre quando uma transição está habilitada
(transição habilitada ocorre quando todos as etapas anteriores, ligadas a essa transição,
estão ativas), e quando sua receptividade de transição é verdadeira.
Evolução das Etapas Ativas
A transposição de uma transição provoca a ativação de todas as etapas posteriores e a
desativação de todas as etapas anteriores. Cabe ao projetista, conhecendo os aspectos
mecânicos e lógicos do sistema, evitar um efeito avalanche para não permitir que diversas
transições sejam simultaneamente transpostas indevidamente.
Evoluções Simultâneas
A evolução entre duas situações implica que nenhuma situação intermediária é
possível. A mudança de uma situação para outra é instantânea.
Várias transições que podem transpor simultaneamente, vão transpor
simultaneamente. Cabe ao projetista procurar evitar essas transposições simultâneas
associando condições de transição mutualmente excludentes a fim de não gerar um
comportamento indesejado no sistema.
Ativação e Desativação Simultânea de uma Etapa
Se uma etapa ativa simultaneamente se ativa e se desativa durante a operação, ela
permanece ativa. Ou melhor, se uma etapa estava incluída em uma situação anterior e
também está incluída na situação posterior, ela deve permanecer ativa.

7
Eventos de Entrada
Um evento de entrada é uma mudança definida pelo valor anterior e valor posterior de
todas as variáveis de entrada que caracteriza esse único evento. Na prática, um grupo de
eventos de entrada é especificado somente pela mudança de estado (borda de subida ou
borda de descida) caracterizado de uma ou várias variáveis booleanas de entrada.
Eventos Internos
A conexão entre uma dada situação e um evento de entrada é chamado de evento
interno. Um conjunto de eventos internos será descrito a seguir.
Evento Interno Descrito pela Ativação de uma
Etapa
A ocorrência de um evento de entrada em uma dada situação que tem como
consequência a ativação de uma etapa.
Evento Interno Descrito pela Desativação de uma
Etapa
A ocorrência de um evento de entrada em uma dada situação que tem como
consequência a ativação de uma etapa.
Evento Interno Descrito pela Transposição de uma
Transição
A ocorrência de um evento de entrada em uma dada situação que tem como
consequência a transposição de uma transição.

8
Modos de Saída
As ações estabelecem uma conexão entre a evolução do GRAFCET e as saídas. Dois
modos de saída, denominados modo contínuo e modo memorizado, descrevem como as
saídas dependem da evolução e das entradas do sistema.
Modo Contínuo
No modo contínuo, a associação de uma ação a uma etapa indica que a variável de
saída tem um valor verdadeiro se a etapa estiver ativa e se a condição de atribuição for
verificada, sendo a condição de atribuição uma expressão lógica das variáveis de entrada
e/ou das variáveis internas.
Se a etapa não tiver ativa ou a condição de atribuição não for verdadeira, a variável de
saída se torna falsa e a ação contínua associada a essa etapa não é realizada.
Modo Memorizado
No modo memorizado, a associação de uma ação com eventos internos é usada para
indicar que uma variável de saída se torna e se mantém verdadeira se um desses eventos
internos ocorrer.
Uma representação explícita é necessária para descrever a associação da ação com os
eventos (ação na ativação da etapa, ação na desativação da etapa, ação na transposição da
transição).
O valor de uma saída (output) associado a uma ação memorizada permanece sem ser
modificada até que um novo evento específico ocorra para modificar seu valor.
Evolução não-Transitória
A evolução é dita não-transitória quando um evento de entrada leva a somente um
estágio de evolução, que seria a transposição de uma ou mais transições simultâneas.
O exemplo a seguir, Figura 2 retirada da norma IEC 60848:2002, mostra uma evolução
não-transitória.

9
Figura 2 - Evolução não-transitória.
Inicialmente a etapa X11 está ativa e a = b = c = 0. Assim que “a” mudar de valor, a =
1, a transição (1) é transposta, desativando a etapa X11 e ativando a etapa X12. Ou seja,
a situação posterior é a etapa X12 ativa.
Evolução Transitória
Em alguns casos, a evolução pode levar a sucessivas transposições de algumas
transições, acarretando não somente um estágio de evolução, mas sim em inúmeros
estágios, se as receptividades associadas as transições subsequentes forem verdadeiras.
Essas etapas intermediárias são etapas instáveis, ou seja, elas não são realmente ativadas,
mas consideram-se que foram virtualmente ativadas e desativadas durante a evolução,
assim como as transições também são virtualmente transpostas.
Na Figura 3 é apresentado um exemplo retirado da norma IEC 60848:2002, em que
ocorre uma evolução transitória.
Figura 3 - Evolução transitória.
Nesse caso, somente a etapa X11 está ativa na situação inicial, porém a receptividade
b = 1 e todas as outras a = c = 0. Assim que a receptividade “a” mudar seu valor para a =
1, a transição (1) é transposta, desativando a etapa X11 e ativando virtualmente a etapa

10
X12. Como a receptividade “b” já era verdadeira, a etapa X12 é virtualmente desativada
e a transição (2) é virtualmente transposta, ativando a etapa X13. Ou seja, para esse caso,
a situação inicial evolui para a situação na qual somente a etapa X13 está ativa.
Consequência da Evolução Transitória no Modo
Contínuo
No modo contínuo, uma ação contínua associada a uma etapa, sendo essa etapa
instável devido a uma evolução transitória, não é efetiva, já que a etapa não é ativada de
fato.
Na Figura 4 é apresentado um exemplo retirado da norma IEC 60848:2002 em que há
uma ação contínua em uma evolução transitória.
Figura 4 - Presença de ação contínua em uma evolução transitória.
Havendo uma evolução transitória como já explicado anteriormente, uma ação
contínua, associada à etapa X12 virtualmente ativada e desativada, não é realizada.
Consequência da Evolução Transitória no Modo
Memorizado
No modo memorizado, uma ação armazenada associada a uma etapa, sendo essa etapa
instável devido a uma evolução transitória, é efetiva desde que essa ação esteja associada
aos eventos responsáveis pela evolução (eventos como ativação e desativação da etapa
instável).
Na Figura 5 é apresentado um exemplo retirado da norma IEC 60848:2002 em que há
uma ação memorizada em uma evolução transitória.

11
Figura 5 - Presença de uma ação memorizada em uma evolução transitória.
Ocorrendo uma evolução transitória, ações armazenadas, associadas a etapas que
sejam virtualmente ativadas e desativadas, são realizadas. Ou seja, a variável de saída “B”
receberá o valor “1” na ativação virtual da etapa X12.
GRAFCET Conexo
Um GRAFCET conexo é uma estrutura na qual sempre existe arco entre quaisquer dois
elementos, alternando entre etapas e transições. Por exemplo, a Figura 6 é um
GRAFCET conexo.
Figura 6 - GRAFCET conexo.
GRAFCET Parcial

12
Um GRAFCET parcial é formado por um ou vários GRAFCETs conexos, um
GRAFCET parcial resulta da divisão do GRAFCET global que descreve o
comportamento da parte sequencial do sistema.
Na Figura 7, G1 e G2 são GRAFCETs parciais que formam o GRAFCET global.
Figura 7 - GRAFCET global formado pelos GRAFCETs parciais G1 e G2.
Uso de Ordem de Forçamento de GRAFCET
Parcial
Ordens de forçamento permitem a imposição de uma situação específica a um dado
GRAFCET parcial, a partir da situação de outro.
Na Figura 8 existem quatro tipos de uso de ordens de forçamento.
Figura 8 - Ordens de forçamento.
Primeira ordem de forçamento da Figura 8: enquanto a etapa X17 estiver ativa, as
etapas X8, X9 e X11 do GRAFCET parcial G12 são ativadas.

13
Segunda ordem de forçamento da Figura 8: enquanto a etapa X48 estiver ativa, a
situação do GRAFCET parcial G3 permanece inalterada. Mais conhecida como “ordem
de congelamento”.
Terceira ordem de forçamento da Figura 8: enquanto a etapa X23 estiver ativa, o
GRAFCET parcial G4 é forçado à situação vazia, ou seja, nenhuma etapa desse
GRAFCET parcial está ativa.
Quarta ordem de forçamento da Figura 8: enquanto a etapa X63 estiver ativa, o
GRAFCET parcial G8 é forçado à situação inicial, ou seja, só a etapa inicial está ativa.
Essa ordem foi usada no projeto.
Representação Gráfica dos Elementos de
GRAFCET
Serão listados na Tabela 1 somente os símbolos usados nesse trabalho e cada símbolo
junto com sua descrição foram retirados da norma IEC 60848:2002 [8]. A numeração dos
símbolos também seguirá a numeração presente na norma.
Tabela 1- Símbolos de GRAFCET e suas descrições.
Número Símbolo Descrição
[1]
Etapa: Num dado instante, a etapa
pode estar tanto ativa quanto inativa.
Recomenda-se que o símbolo seja
um quadrado.
O rótulo para se referir à etapa deve
substituir o asterisco, por exemplo, um
valor alfanumérico.
Para indicar que uma etapa está ativa
usa-se um ponto.
[2]
Variável da Etapa: Uma etapa
ativa ou inativa pode ser representada
por um valor lógico “1” ou “0”,
respectivamente, de uma variável
booleana X*, em que o asterisco deve
ser substituído pelo rótulo da etapa em
questão.
[3]
Etapa Inicial: Indica que essa etapa
pertence à situação inicial.

14
[7]
Transição: Sempre de uma etapa
para outra. É representada por uma
linha sempre perpendicular ao arco
que liga as etapas.
Pode ser posicionada em arcos que
se encontram na horizontal, só por
questões de representação gráfica.
Transição Fonte: Transição que
não possui nenhuma etapa de entrada.
Por convenção, é uma transição
sempre habilitada e é transposta
quando sua receptividade * passa a ser
verdadeira.
Transição Dreno: Transição que
não possui etapas de saída. É transposta
quando sua receptividade * passa a ser
verdadeira.
[8]
Designação da Transição:
Transições devem ter receptividades
que geralmente são colocadas à
esquerda da transição, para não ser
confundido com receptividade de
transição. O asterisco é substituído por
um valor alfanumérico.

15
[9]
Sincronização precedendo ou
sucedendo uma transição: Quando
várias etapas estão conectadas à
mesma transição, os arcos que partem
das etapas e chegam na transição, ou
mesmo os arcos que partem da
transição e chegam nas etapas são
agrupados. É representado por duas
linhas horizontais paralelas.
[10]
Arco de Cima para Baixo: O
caminho de evolução entre etapas é
indicado por arcos conectando etapas
a transições e transições a etapas.
Por convenção, a direção de
evolução é sempre de cima pra baixo.
Arcos são representados na vertical
e horizontal. O uso na diagonal é
permitido quando facilitar uma melhor
interpretação do gráfico.
[11]
Arco de Baixo para Cima:
Quando a convenção não é respeitada,
usa-se uma SETa para indicar a
direção de evolução e, até mesmo,
para facilitar a interpretação do
gráfico.
[13]
Receptividade de Transição:
Uma proposição lógica associada a
cada transição que pode ser tanto
verdadeira ou falsa.
Se uma variável lógica
correspondente existir, ela é igual a
“1”, quando a receptividade for
verdadeira, ou igual a “0”, quando a
receptividade for falsa.
Receptividades podem ser
inúmeras variáveis booleanas, tais
como: variáveis de entrada, variável
de etapa, etc.

16
[15]
Borda de Subida de uma Variável
Lógica: O símbolo “↑” significa que a
transição de condição é verdadeira
somente na mudança de estado da
variável (na mudança do valor “0” para
o valor “1”).
[16]
Borda de Descida de uma Variável
Lógica: o símbolo “↓” significa que a
transição de condição é verdadeira
somente na mudança de estado da
variável (na mudança de valor “1” para o
valor “0”).
[18]
Receptividade de Transição
Dependente do Tempo: Indica que a
receptividade de transição é verdadeira
após um tempo t1 da ocorrência da
ativação da etapa X*, e se torna falsa na
desativação da etapa X*.
[20]
Ação Contínua: É necessariamente
associada a uma etapa. Inúmeras ações
contínuas podem ser associadas a uma
etapa.
[21]
Designação de uma Saída: É a
designação de uma variável de saída
associada ao seu valor verdadeiro de
acordo com a regra de designação.
Cada ação deve ter uma designação,
um rótulo dentro do retângulo, se
referindo a essa ação.
[22]
Condição de Designação: Uma
proposição lógica que pode ser
verdadeira ou falsa e que influencia
ações contínuas.
A ausência de notação indica que a
condição é sempre verdade.
O asterisco pode ser substituído por
uma designação em formato de texto,
uma expressão booleana entre variáveis
de entrada e/ou variáveis internas.

17
[27]
Ação na Ativação: É uma ação
armazenada ou impulsional realizada na
ativação da etapa com a qual está
associada.
[28]
Ação na Desativação: É uma ação
armazenada ou impulsional realizada na
desativação da etapa com a qual está
associada.
[29]
Ação na Transposição: É uma ação
memorizada que ocorre na transposição
de uma transição
[32]
Nome de um GRAFCET Parcial:
Por convenção, a letra G indica um
GRAFCET parcial.
O asterisco deve ser substituído pelo
nome do GRAFCET parcial.
[34]
Situação de um GRAFCET
Parcial: É representada pelo conjunto
de suas etapas ativas em um
determinado instante.
A situação de um GRAFCET parcial
# é dado por G#...,... e o conteúdo
entre parêntesis lista as etapas ativas
desse GRAFCET parcial nesse dado
instante.
[37]
Situação Inicial de um GRAFCET
Parcial: Conduz a situação de um
GRAFCET parcial # à situação inicial.
[38]
Ordem de Forçamento de um
GRAFCET Parcial: É uma ordem
interna, associada à atividade de uma
etapa de um GRAFCET parcial de nível
hierárquico maior, que permite impor
uma situação a um outro GRAFCET
parcial de nível hierárquico menor.

18
2.2. Inversor de Frequência
O inversor de frequência é um equipamento eletroeletrônico capaz de transformar um
sinal senoidal de entrada (com uma certa tensão e frequência de entrada), em outro sinal
senoidal modificado de saída (com uma tensão e frequência de saída). Uma forma de onda
de uma senóide modificada genérica é mostrada na Figura 9.
Figura 9 - Senóide modificada genérica em vermelho e sua componente fundamental
filtrada em azul.
A onda em vermelho é uma senóide modificada genérica e a onda em azul é a onda
senoidal modificada filtrada (com um filtro passa baixas), a fim de obter sua componente
fundamental.
Inversores de frequência são muito usados para acionamentos de motores de indução,
por exemplo, já que permitem ajuste de nível de tensão e frequência de alimentação do
motor para controle de sua velocidade rotórica e torque mecânico. De forma bem
simplificada, o circuito eletroeletrônico de um inversor de frequência é mostrado na
Figura 10.
Figura 10 - Circuito eletroeletrônico de um inversor de frequência.

19
As entradas do inversor de frequência, nomeadas de R, S e T (rede trifásica, podendo
ser também monofásica), são ligadas na parte retificadora, também chamada de ponte
retificadora trifásica (podendo ser uma ponte retificadora monofásica caso a entrada seja
monofásica), formada por diodos ou tiristores, que retifica a tensão de entrada e alimenta
o barramento CC, carregando o banco de capacitores. Na saída existe um módulo de
potência que contém IGBTs (Insulated Gate Bipolar Transistor) em seu interior.
Os IGBTs são semicondutores de potência totalmente controláveis, ou seja, recebe um
sinal de controle para condução do IGBT e outro sinal de controle para o corte da
condução. A lógica de controle por PWM, proveniente da placa de controle, controla os
disparos dos IGBTs o que produz ondas senoidais modificadas nas saídas U, V e W.
Embora não sejam senóides puras, esse sinal de tensão de saída do inversor consegue
acionar um motor de indução perfeitamente. Os próprios enrolamentos ou bobinas
presentes nos motores servem como filtros de altas frequências, ou seja, a tensão que
chega no motor tem a forma da onda vermelha da Figura 9, mas a corrente nos
enrolamentos é filtrada e tem a forma mais parecida com a onda azul. Existe a
possibilidade, também, de acoplar filtros passa-baixa, na saída do inversor com intuito de
tornar a saída o mais senoidal possível, ou seja, diminuindo as harmônicas, ou em outras
palavras, diminuindo o THD, Total Harmonic Distortion, fazendo a tensão já chegar aos
enrolamentos com a forma da onda em azul para reduzir o consumo de energia.
2.2.1. Controle Escalar V/f
Controle de velocidade escalar é muito utilizado para motores de indução,
principalmente para situações de torque constante. A estratégia para o controle escalar é
manter o fluxo de entreferro constante. Como a relação entre o torque eletromecânico
desenvolvido pelo motor de indução e a densidade de fluxo eletromagnético é dada pela
equação (1), nota-se que para um fluxo eletromagnético no entreferro constante, o torque
desenvolvido também é constante [9], [10].
𝑇𝑒𝑚 = 2𝜋𝑟2𝑙𝐾𝑟𝐵𝑚 (1)
Na qual:
𝑇𝑒𝑚: torque desenvolvido pelo motor;
𝑟: raio do rotor;
𝑙: comprimento axial do rotor;
𝐾𝑟: valor RMS da densidade linear de corrente do rotor;
𝐵𝑚: valor RMS da densidade de fluxo no entreferro.
Em motores de indução, o fluxo de entreferro é proporcional à tensão em cima da
reatância de magnetização (tensão de entreferro) e inversamente proporcional à
frequência da tensão de entrada (no estator), dada pela equação (2) [10], [11],.

20
𝐸𝑚
𝑓1= 4,44 𝑁1𝑘𝜔𝜑𝑚 (2)
Na qual:
𝐸𝑚: tensão de entreferro;
𝑓1: frequência da tensão de entrada;
𝑁1: número de espiras no enrolamento por fase do estator;
𝑘𝜔: constante de enrolamento da máquina;
𝜑𝑚: fluxo de entreferro por polo.
A tensão 𝐸𝑚, tensão na reatância de magnetização, não é a mesma tensão de entrada,
𝑉1, conforme mostra o circuito equivalente de um motor de indução, Figura 11. Na
realidade a tensão de entreferro é a tensão de entrada reduzida da queda de tensão em
cima da impedância estatórica, R1+jX1. Então para manter 𝐸𝑚
𝑓1 constante, 𝑉1 deve ser
controlado para controlar o valor de 𝐸𝑚.
Figura 11 - Circuito equivalente de um motor de indução.
Mantendo a relação 𝐸𝑚
𝑓1 constante, o fluxo de entreferro, 𝜑𝑚, também se mantém
constante. Se o fluxo de entreferro, 𝜑𝑚 , for constante, a densidade de fluxo, 𝐵𝑚 , também
se mantém constante. 𝐾𝑟 também se mantém constante por ser um valor proporcional a
corrente do estator, i2, já que a corrente no estator é constante por se tratar de um controle
para carga constante. Então se obtém o torque, 𝑇𝑒𝑚, no motor de indução constante.
Supondo, no caso, que seja mantida a relação 𝑉1/𝑓1. Para manter a tensão de entreferro
constante e, consequentemente, 𝜑𝑚 constante, ao ocorrer uma eventual queda na corrente
𝑖1, como a tensão na impedância estatórica diminuiria, 𝐸𝑚 aumentaria. Logo a corrente
de magnetização, 𝑖𝑚 deve aumentar, então é preciso compensar diminuindo a tensão 𝑉1.
Caso o contrário ocorra, ou seja, haja um aumento da corrente 𝑖1, a tensão 𝐸𝑚 vai
diminuir, 𝑖𝑚 vai diminuir, logo é preciso aumentar a tensão 𝑉1 para manter o fluxo de
entreferro constante. Considerando, agora, que a frequência 𝑓1 varie, a tensão 𝐸𝑚 deve
variar igualmente segundo a equação (2). Assim que funciona o controle escalar V/f,
varia-se 𝑉1 de acordo com a variação tanto da frequência 𝑓1, quanto da corrente 𝑖1 para
alterar 𝐸𝑚 e manter o fluxo de entreferro constante, mantendo o torque mecânico
constante.

21
2.2.2. Controle V/f em Malha Aberta
A Figura 12 apresenta um sistema com método de controle escalar V/f malha aberta.
Figura 12 - Controle escalar V/f malha aberta [10].
É um sistema em malha aberta no qual ajusta-se a tensão V1 e a frequência f1 a partir
de uma função pré-determinada V1 = f(f1) e da velocidade rotórica 𝜔1, sem levar em
consideração a dependência da carga, ou seja, escorregamento constante. Esse método de
controle desconsidera a queda de tensão na impedância estatórica, tornando a relação V/f
linear.
Esse método leva à perda de torque em baixas frequências pois a queda na resistência
do estator passa a ser significativa para essas frequências. Para corrigir essa perda de
torque em baixas frequências é utilizado um booster de tensão (início das curvas azul e
vermelha no Gerador de Função da Figura 12), aumentando a tensão para baixas
frequências e com isso aumentando o seu conjugado.
2.2.3. Controle Escalar V/f do Inversor de Frequência
da WEG, Modelo CFW300
O inversor de frequência usado nesse projeto é o modelo da WEG, CFW300. O método
de controle escalar V/f usado está descrito na Figura 13.
Conforme o diagrama de blocos, a referência de frequência f*, limitada por P133
(velocidade mínima) e P134 (velocidade máxima), é aplicada ao bloco “Curva V/f” de
onde sai a amplitude de tensão e sua frequência que são enviadas ao motor.
Com o monitoramento da corrente de saída, tanto a total, quanto a sua componente
ativa, além do monitoramento da tensão no barramento CC, são implementados
compensadores e reguladores que auxiliam na proteção e desempenho do controle V/f
[12].

22
Figura 13 - Controle escalar V/f do inversor de frequência CFW300.
2.2.4. Características do Inversor de Frequência da
WEG, Modelo CFW300
O inversor de frequência usado nesse projeto tem entrada monofásica e saída trifásica
com os dados de placa presentes na Figura 14.

23
Figura 14 - Dados de placa do inversor de frequência CFW300.
O inversor de frequência apresenta um borne de controle com quatro entradas digitais
(DI1 a DI4), uma entrada analógica de corrente (AI1 (A)) e outra de tensão (AI1 (V)),
uma saída digital a relé (contatos N.F., Comum, N.A.) e a conexão do terra (GND) de
acordo com a Figura 15. As entradas digitais podem ser parametrizadas e associadas a
funções, por exemplo, RUN, STOP, multispeed (velocidades de rotação do motor) e
frenagem CC (injeção de corrente contínua no motor).
Figura 15 - Borne do inversor de frequência CFW300.
2.3. Circuito Ponte H
Ponte H é um circuito usado para, a partir de uma fonte de tensão e corrente constante
(fonte CC), obter uma saída com polaridade de tensão e sentido de corrente ajustável. É

24
usado, também, para controle de sentido de giro e controle de velocidade de motor CC,
ou até mesmo como inversor monofásico. Por isso esse circuito foi escolhido para
controlar o sentido de giro do motor CC da porta da cabina da maquete.
Na Figura 16 são apresentados dois circuitos. O de cima é o circuito de ponte H
mais usual, formado por quatro chaves (podem ser transistores ou mesmo relés), S1, S2,
S3 e S4 e o de baixo o circuito ponte H escolhido para o projeto. No circuito de cima, o
sentido da corrente no motor é para a esquerda (motor girará em um sentido, horário, por
exemplo) caso as chaves S1 e S4 estejam fechadas e S2 e S3 abertas; o sentido da corrente
se inverte (motor girará no outro sentido, anti-horário) caso as chaves S2 e S3 se fechem
e S1 e S4 se abram. Já no circuito escolhido, o sentido da corrente é para a esquerda
(motor girará no sentido horário) se o Relé2 for energizado e o Relé1 se mantiver
desligado; o sentido da corrente se inverte (motor girará no sentido anti-horário) caso o
Relé1 se energize e o Relé2 se desenergize.
Figura 16 - Dois tipos de circuitos ponte H. Na Figura 16a) o circuito mais usual e na
Figura 16b) o circuito escolhido para o projeto.
O circuito com dois relés foi escolhido pois evita um curto-circuito na fonte CC de
alimentação (fonte +V, -V da Figura 16) devido ao seu isolamento galvânico. No caso da
Figura 16a), as chaves S1 e S3 nunca devem ser fechadas simultaneamente, isso também
vale para as chaves S2 e S4, já que isso ocasionaria um curto circuito na fonte. A
configuração escolhida, com dois relés, evita tal incidente.

25
2.4. Controladores Lógicos Programáveis (CLP)
Segundo a NEMA (National Electrical Manufactures Association), o CLP é um
computador com memória programável capaz de armazenar instruções que são usadas
para realizar funções específicas, ou mesmo um dispositivo eletrônico usado no mercado
pelas empresas que controlam inúmeros processos através de entradas e saídas digitais ou
analógicas.
Para o CLP interagir com a planta, é necessária a presença de sensores e atuadores. Os
sensores enviam sinais elétricos proveniente da mudança da condição física de um
elemento do sistema para o CLP. Já os atuadores recebem os comandos elétricos da saída
do CLP e convertem esses comandos em uma ação física no sistema.
Por exemplo, a Figura 17 mostra, de forma simplificada, a abertura da porta da cabina
quando o elevador chega no andar. O sensor magnético, quando percebe o imã preso à
cabina (indicando que a cabina chegou no andar), envia um sinal para as entradas do CLP
que executa o ladder e envia o comando abrir porta através de sua saída. A saída alimenta
o Relé 1 da ponte H e com isso, o motor CC da porta da cabina é alimentando pela fonte
CC, abrindo a porta. A fonte CC está presente para converter uma tensão alternada da
rede em uma tensão menor e contínua para ser usada pelo relé da ponte H, pelo motor CC
e pelo CLP que funcionam com tensão contínua.
Figura 17 - CLP controlando abertura de portas de um elevador.

26
De modo geral o CLP funciona em dois modos: programação e execução. No modo
programação, o usuário consegue editar os parâmetros e configurações, e o CLP não
executa nenhuma ação. Já no modo execução, o CLP executa o programa do usuário
realizando ciclos de varredura. Um ciclo de varredura é constituído de três etapas: (i)
realização da leitura de entradas; (ii) execução do código de controle programado; (iii)
atualização das variáveis de saída e de valores de outras variáveis como temporizadores
e contadores.
As linguagens de programação de CLPs definidas pela norma internacional IEC61131-
3, são: (i) diagrama de bloco de funções; (ii) diagrama ladder; (iii) sequenciamento
gráfico de funções (em inglês, SFC – Sequential Function Chart); (iv) lista de instrução
e (v) texto estruturado.
Este trabalho apresenta a conversão de um GRAFCET em diagrama ladder. Essa
linguagem foi escolhida pois é a mais utilizada pela indústria e por estar disponível em
quase todos CLPs.
A linguagem em diagrama ladder está presente nos CLPs escolhidos para este projeto.
São três CLPs da empresa Schneider Electric, dois deles são modelo Zelio Logic
SR2D101BD e um modelo Zelio Logic SR2B202BD. As características dos CLPs usados
neste trabalho serão detalhadas no capítulo 3, Estudo de Caso. Além disso, foi usado o
programa Zelio soft 2 que permite parametrizar e mudar as configurações dos CLPs via
computador e programar o diagrama ladder usado no projeto [13].
2.5. Diagrama Ladder usado pelo Zelio soft 2 da
Schneider Electric
No diagrama ladder, as funções lógicas são representadas por contatos e bobinas de
forma análoga a um esquema elétrico com relés e contatores, e sua leitura é feita de cima
para baixo, da esquerda para direita.
Além de bobinas e contatos, também existem contadores, temporizadores,
comparadores, funções de cálculos matemáticos, bloco de texto (mensagem escrita que
pode ser exibida no display), dentre outras funções. Neste trabalho, serão usados contatos,
bobinas, temporizadores e bloco de texto presentes no Zelio soft 2.
A Figura 18 mostra o programa Zelio soft 2, indicando as opções de entradas digitais
(discrete inputs), bobinas auxiliares (auxiliary relays), saídas digitais (discrete outputs),
temporizadores (timers) e blocos de texto (text block).

27
Figura 18 - Programa Zelio soft 2 da Schneider Electric.
2.5.1. Contatos
Os contatos existentes no programa Zelio soft 2 usados neste projeto são de dois tipos,
contato NA (normalmente aberto) e contato NF (normalmente fechado), conforme
mostrado na Figura 19.
Figura 19 - Contatos NA e NF presentes no software usado.
A Figura 19 apresenta um contato NA previamente nomeado de N5 pelo programa,
em caixa alta, associado a uma variável de entrada genérica sensor1 e um contato NF
nomeado de n5 pelo programa em caixa baixa, associado à mesma variável sensor1.
No programa Zelio soft 2, todos os contatos, bobinas, temporizadores são memórias
internas previamente nomeadas, ou seja, N5 é um rótulo previamente definido. A Figura
20a) mostra as memórias internas previamente definidas para as variáveis de entrada
digitais (discrete inputs), a Figura 20b) as bobinas auxiliares (auxiliary relays, que serão
usadas para variáveis internas) e Figura 20c) as variáveis de saída digitais (discrete
outputs).

28
Figura 20 - Entradas digitais, contatos e bobinas auxiliares e saídas digitais presentes
no software.
O contato NA verifica o estado lógico da variável associada a ele, quando o seu valor
lógico é 1, o contato retorna o valor verdadeiro, dando continuidade lógica no segmento
que ele está inserido; caso o valor lógico seja 0, o contato retorna valor falso,
interrompendo o segmento. Já o contato NF funciona de forma contrária ao contato NA,
retornando verdadeiro caso a variável tenha valor lógico 0 e retornando falso caso a
variável tenha valor lógico 1.
2.5.2. Bobinas
As bobinas existentes são de quatro tipos: bobina simples, bobina impulsional, bobina
SET e bobina RESET, como mostrado na Figura 21.
Figura 21 - Tipos de bobinas existentes no software.

29
A Figura 21 apresenta a bobina simples rotulada de N1, associada à variável t10 (por
exemplo, a transição (10) de um GRAFCET genérico), a bobina impulsional rotulada de
N2, a bobina SET de N3, rotulada de SN3, e a bobina RESET de N4, rotulada de RN4,
associada à variável Ligar Motor (por exemplo, uma ação memorizada).
Quando um sinal chega na bobina (sinal de valor lógico 1), é dito que ela foi
energizada. A bobina simples é energizada quando um sinal de valor lógico 1 é percebido
e é desenergizada quando o sinal é interrompido (sinal de valor lógico 0).
A bobina impulsional é energizada e desenergizada quando há uma variação de valor
lógico de 0 para 1. Ela detecta uma borda de subida do sinal e muda seu estado. Ela
estando inicialmente desenergizada, quando detecta uma borda de subida do sinal ela se
energiza e permanece energizada até que ela detecte outra borda de subida, voltando a
ficar desenergizada.
A bobina SET é energizada quando um sinal de valor lógico 1 é percebido e permanece
energizada mesmo que esse sinal mude para valor lógico 0. A bobina SET, quando
energizada, altera o valor lógico da memória interna associada a ela para 1 e mantém esse
valor. Para desenergizar uma bobina SET e mudar o nível lógico da memória interna para
0, a sua bobina RESET deve receber um sinal de valor lógico 1. Ou seja, se a bobina SET
de N3 (SN3) for energizada, a memória interna N3 muda para valor lógico 1 e permanece
até a bobina RESET de N3 (RN3) ser energizada, mudando o valor lógico de N3 que
estava em 1 para 0 e permanecendo nesse novo valor lógico.
A bobina RESET funciona de forma contrária à da bobina SET. Quando um sinal de
valor lógico 1 é percebido, ela energiza e permanece energizada. Porém, a bobina RESET,
quando energizada, altera o valor lógico da memória interna associada para 0 e mantém
esse valor. Para desenergizar uma bobina RESET e mudar o nível lógico da memória
interna para 1, a sua bobina SET deve receber um sinal de valor lógico 1. Ou seja, se a
bobina RESET de N2 (RN2) for energizada, a memória interna N2 muda para valor lógico
0 e mantém esse valor até a bobina SET de N2 (SN2) ser energizada, mudando o valor
lógico de N2 que estava em 0 para 1 e permanecendo nesse novo valor lógico.
2.5.3. Temporizadores
Temporizadores são usados para fazer uma lógica dependente do tempo no diagrama
ladder e, com isso, representar alguma instrução temporizada do sistema a ser controlado.
Como no GRAFCET existem receptividades de transições temporizadas, ou mesmo ação
temporizada, faz-se uso dos temporizadores.
No programa existem onze tipos de temporizadores, sendo possível escolher a unidade
de tempo (fração de segundos, segundos, minutos, horas) e o tempo t para seu
funcionamento. Alguns tipos de temporizadores mais conhecidos e presentes no software
são, Function A: Active, control held down (conhecido como timer on delay); Function

30
a: Active, press to start/STOP; Function C: off delay (conhecido como timer off delay),
dentre outros. A Figura 22 apresenta os tipos de temporizadores presentes no Zelio soft 2.
Figura 22 - Tipos de temporizadores presentes no software.
Os temporizadores apresentam bobinas e contatos já nomeados pelo programa Zelio
soft 2 conforme Figura 23.
Figura 23 - Contatos e bobinas dos temporizadores.
Os contatos são nomeados como Tx (x um valor alfanumérico) e as bobinas TTx e
RTx. De forma geral, a bobina TTx é responsável por receber o sinal de entrada do
temporizador para começar a conTAGem do tempo e a bobina RTx é responsável pela a
reinicialização da conTAGem. Para ser mais exato, a função das bobinas depende do tipo

31
de temporizador usado. Há tipo de temporizador que só necessita de um sinal de entrada
(TTx) para iniciar e reinicializar a conTAGem do tempo, enquanto há outros tipos de
temporizadores que têm duas entradas de sinais, um para iniciar (TTx) e outro para
reinicializar (RTx) a conTAGem de tempo. A Figura 24 apresenta de forma ilustrativa o
contato do temporizador T2 e das suas bobinas, TT2 e RT2.
Figura 24 - Contatos e bobinas do temporizador T2.
O temporizador Function A, ao receber um sinal verdadeiro em sua bobina TTx, conta
um tempo t e muda o sinal de falso para verdadeiro em seu contato Tx; para reinicializar
o temporizador, o sinal em sua bobina TTx deve ir a falso, mudando o sinal de seu contato
de verdadeiro para falso também.
O temporizador Function a funciona com dois sinais de entrada. Ao receber um pulso
de sinal verdadeiro em sua bobina TTx, ele conta um tempo t e muda o sinal de falso para
verdadeiro em seu contato Tx; para reinicializar o temporizador, um pulso de sinal
verdadeiro deve ser enviado para sua bobina RTx, mudando o sinal de seu contato de
verdadeiro para falso também.
Já o temporizador Function C ao receber um sinal verdadeiro em sua bobina TTx, seu
contato Tx muda de falso para verdadeiro; quando o sinal na bobina TTx muda para falso,
o seu contato Tx leva um tempo t para mudar de valor verdadeiro para valor falso.
Neste trabalho foram usados os temporizadores Function A e Function a para a
inicialização das etapas iniciais (símbolo (3) da Tabela 1) e para a transposição
temporizada de uma transição (símbolo (18) da Tabela 1) respectivamente.
2.5.4. Bloco de Texto
No bloco de texto há bobinas que possibilitam exibir alguma mensagem de texto no
display do CLP quando energizadas. Essa função bloco de texto está disponível para o
modelo Zelio Logic SR2B202BD pois esse apresenta display, e não está presente no
modelo Zelio Logic SR2D101BD, já que não apresenta display.
As bobinas já estão listadas no programa como pode ser visto na Figura 25.

32
Figura 25 - Bobinas da função bloco de texto.
As bobinas TXx e RXx (x um valor alfanumérico, conforme Figura 25) funcionam
como bobinas SET e RESET respectivamente, ou seja, ações armazenadas ou
impulsionais. Quando uma bobina TXx é energizada, uma mensagem de texto será
exibida no display e permanecerá no display até que a bobina RXx seja energizada,
retirando a mensagem do display. Conforme a Figura 26, essa mensagem pode ser uma
data, hora, valor de alguma variável interna do programa, ou mesmo um texto definido
(“elevator” no caso da Figura 29).
Figura 26 - Configuração de um bloco de texto.
2.6. Conversão do GRAFCET para Ladder
O método proposto neste trabalho realiza a conversão de um GRAFCET para ladder
baseada no método proposto em [6], que consiste na conversão de uma Rede de Petri
Interpretada para Controle (RPIC) para diagrama ladder. Como GRAFCET tem muitas

33
semelhanças a uma RPIC, possuindo a mesma regra de evolução do sistema, eventos
de entrada e saída, transições, transposição de transições e lugares equivalentes a
etapas, é possível considerar que o método Moreira e Basílio (2013) proposto em [6]
converta um GRAFCET para diagrama ladder.
Ou seja, o método sugerido neste trabalho divide o diagrama ladder em cinco módulos,
a saber: (i) módulo de inicialização, (ii) módulo de eventos externos, (iii) módulo das
condições, (iv) módulo da dinâmica e (v) módulo das ações. Porém, algumas
modificações foram feitas no método para se ajustar ao diagrama ladder presente no
software Zelio soft 2.
2.6.1. Módulo de inicialização
Neste módulo é feita a inicialização do GRAFCET. Todas as etapas iniciais que devem
ser ativadas no instante inicial, serão ativadas.
O método Moreira e Basílio (2013) utiliza um contato normalmente fechado associado
a uma memória interna, B0, para energizar bobinas SET associadas aos lugares iniciais
(que devem receber as fichas inicialmente) e energizar a bobina SET associada à memória
interna B0 para que no próximo ciclo de varredura o contato normalmente fechado de B0
esteja aberto, tendo finalizado a inicialização. A Figura 27 mostra os lugares iniciais p1,
p2, p3, p6 sendo inicializados, cada um com uma ficha, exceto p6 que inicializa com duas
fichas.
Figura 27 - Modo da inicialização.
Se for considerado que lugares em redes de Petri são equivalentes às etapas em
GRAFCET, a presença de uma ou mais fichas em uma etapa significa que essa etapa está
ativada e a ausência de fichas significa que ela está desativada.
O método para fazer o módulo de inicialização proposto neste trabalho é diferente do
método Moreira e Basílio (2013), porque os CLPs usados não permitem o uso direto desse
método já que o número de bobinas SET e RESET para cada memória interna é limitado
a uma bobina de cada tipo, impedindo a repetição de bobinas SET e RESET no diagrama
para uma mesma memória interna. Ou seja, a memória interna que será associada a uma
etapa será ativada de outra forma detalhada no capítulo 4.

34
2.6.2. Módulo de Eventos Externos
No módulo de eventos externos todos os sinais de entrada são associados a memórias
internas, ou seja, seus valores, a cada ciclo de varredura, são lidos e armazenados nessas
memórias. A Figura 28, mostra como é feita a detecção de uma borda de subida de uma
variável de entrada segundo método Moreira e Basílio (2013).
Figura 28 - Modo de eventos externos. Detecção de borda de subida de um sinal.
Os contatos NA (normalmente abertos) nomeados de INPUT signal são entradas
digitais. O contato NF (normalmente fechado) de B1 e suas bobinas SET e RESET servem
para identificar um sinal de borda de subida e armazenar esse valor na bobina ↑signal.
Inicialmente o contato NF de B1 está fechado e quando o INPUT signal muda seu estado
lógico de falso para verdadeiro (borda de subida), tanto a bobina ↑signal, quanto a bobina
SET de B1 são energizadas. Quando o valor do INPUT signal ficar falso, a bobina RESET
de B1 é energizada e o contato NF de B1 volta a se fechar.
O módulo de eventos externos proposto nesse trabalho é parecido com o método
Moreira e Basílio (2013), porém não foi usado a detecção de bordas de subida. Uma
entrada digital, representada por contato NA ou NF, detecta o valor lógico do sinal e
energiza uma bobina simples de uma memória interna. Essa bobina, ao se energizar ou
desenergizar, armazena o valor do sinal de entrada. O módulo dos eventos externos será
explicado melhor no capítulo 4.
2.6.3. Módulo das Condições
No módulo das condições são estruturadas as condições para transposição das
transições. A Figura 29 apresenta um exemplo de como o ladder é construído segundo o
método Moreira e Basílio (2013).

35
Figura 29 - Modo das condições.
A Figura 29 apresenta cinco transições, t1, t2, t3, t4 e t5, representadas por bobinas. A
transição t1 transpõe quando os lugares P1 e P2 e a receptividade R1 são verdadeiros. A
transição t2, t3 e t4 transpõem de forma bem análoga a t1. E a transição t5, temporizada
com um delay d5, transpõe quando P5 e R5 são verdadeiras e quando P6 receber, no
mínimo, três fichas.
Para haver a transposição de cada transição associada a uma bobina é necessário
colocar contatos em série que representem as etapas anteriores a essa transição e a sua
receptividade.
Seguindo as regras de transposição de transição e o método Moreira e Basílio (2013).
foi elaborado um módulo das condições diferente que representasse essas transposições
e se adequasse ao software dos CLPs utilizados neste trabalho.
2.6.4. Módulo da Dinâmica
Após a transposição de cada transição, as etapas devem ser atualizadas. A Figura 30
mostra a conversão da dinâmica para ladder segundo método Moreira e Basílio (2013).
Figura 30 - Modo da dinâmica.
Neste método como é usado para RPIC, quando uma transição é transposta, uma ficha
é adicionada nos lugares posteriores e uma ficha é retirada dos lugares anteriores. Logo,
quando a transição é transposta, seu contato fecha e energiza as bobinas SET e RESET
associadas aos lugares que ganharam e perderam fichas respectivamente. Fazendo uma
associação de que lugares são etapas, para converter um GRAFCET em um diagrama
ladder como o da Figura 30, a etapa que é ativada (lugar que recebe ficha), é associada a
uma bobina SET e a etapa desativada (lugar que perde uma ficha), é associada a uma
bobina RESET.

36
O método usado neste trabalho para elaborar o módulo da dinâmica também é diferente
do método da Figura 30. Mais uma vez, devido à impossibilidade do uso direto do método
Moreira e Basílio (2011) para programar no software Zelio soft 2, uma outra estrutura de
ladder foi desenvolvida e explicada no capítulo 4.
2.6.5. Módulo das Ações
No módulo das ações, as etapas são associadas às bobinas das saídas digitais. E essas
bobinas são associadas às ações tanto contínuas, quanto impulsionais. Caso uma ação
impulsional seja associada a uma etapa, é usada uma bobina SET e caso essa ação seja
contínua, uma bobina simples. A Figura 31, segundo o método Moreira e Basílio (2013),
mostra o módulo das ações.
Figura 31 - Modo das ações.
Na Figura 31 o lugar P4, representado por um contato NA, tem uma ação contínua
action X associada a ele. Quando esse lugar recebe uma ficha, seu contato se fecha e a
bobina de saída nomeada de action X é energizada. Essa bobina de saída ao se energizar,
fecha um contato físico (relé ou transistor) de saída do CLP que fecha um circuito elétrico,
realizando a ação action X.
Neste trabalho a maioria das ações são contínuas, exceto para as mensagens de texto
dos blocos de textos, que são ações armazenadas ou impulsionais que ocorrem na ativação
de etapas. Ou seja, o módulo das ações proposto no método Moreira e Basílio (2013) foi
o único módulo que pôde ser usado de forma direta no programa Zelio soft 2 usado nesse
trabalho, com uma adição para o RESET dos blocos de texto que ocorrem na transposição
de transições. Esse módulo também é explicado capítulo 4.

37
3. Construção da maquete com base em
aspectos construtivos de um elevador
de passageiro
Este trabalho tem como objetivo criar uma maquete de um elevador de dois
pavimentos que se aproxime ao máximo à realidade, ou seja, que contenha algumas das
estruturas, sensores e equipamentos presentes em um elevador real, com as mesmas
funções, e que opere da mesma forma ou muito próximo ao comportamento de um
elevador real.
Primeiramente serâo descritos os aspectos construtivos de elevadores seguindo a
norma NBR NM 207:1999 [7] e em seguida, na seção 3.2 deste capítulo, serão
apresentados os aspectos construtivos da maquete.
3.1. Aspectos Construtivos Gerais de Elevador de
Passageiro
Segundo NBR NM 207:1999 nos seus itens [12.2] e [9.1.1], os elevadores só podem
ser acionados por tração e devem utilizar cabos de aço para sustentar a cabina. Os cabos
são presos a um sistema de polias com cavidades especiais que impedem seu
deslizamento. A roldana é acoplada diretamente ao eixo do motor elétrico, ou através de
uma caixa redutora, que reduz a velocidade de rotação da roldana em relação à velocidade
do motor. A redutora permite que o motor opere com sua velocidade nominal (velocidade
de rotação muito elevada para movimentar a cabina) reduzindo essa velocidade angular
para que a cabina se mova com velocidade linear confortável aos passageiros. Por
exemplo, de acordo com [14], a velocidade em elevadores de percurso de até 29 m que
atendam de seis a oito pessoas é de 1 m/s.
Em geral, no mercado atual motores de indução são utilizados sendo acionados por
inversores de frequência (tecnologia nova que conquistou o mercado). O motor acoplado
a uma caixa redutora é chamado de máquina de tração. Caso não haja caixa redutora, a
máquina de tração é somente o motor.
Quando a máquina de tração se move, a roldana que tensiona os cabos de aço é
acionada que por sua vez movimenta a cabina para cima ou para baixo. A máquina de
tração e o sistema de controle ficam normalmente na casa de máquinas que se encontra
acima do último pavimento.
Os cabos de aço além de estarem conectados à cabina, também são conectados ao
contrapeso. O motivo de se usar o contrapeso é para equilibrar, ao máximo, o conjunto e
assim poupar energia, já que assim o motor vai precisar fornecer energia somente para

38
tirar a cabina da inércia. Um sistema sem contrapeso se assemelha a uma balança com
carga em só um dos lados. Para mover a balança é necessário realizar uma força maior,
logo um torque maior. Ou seja, exigiria motores maiores, de maior potência para erguer
a carga total da cabina, o que desperdiçaria muito mais energia.
A cabina e o contrapeso são fixados a um sistema de trilhos guias, localizados por
toda a extensão do poço do elevador. As guias evitam que a cabina e o contrapeso
balancem em excesso e servem também para fixação dos freios de emergência.
3.1.1. Cabos de aço e circuito de emergência
Os elevadores são máquinas muito seguras, pois existem vários sistemas de
segurança redundantes que garantem que a cabina raramente caia. O primeiro deles são
os cabos de aço mostrados na Figura 32 (fotos salvas durante um serviço de manutenção
de um elevador realizado pela empresa Crown Serviços de Elevadores).
Figura 32 – Acima, os cabos de aço ligados à máquina de tração e abaixo, os cabos
de aço presos à cabina.
Cada cabo de aço, respeitando a norma NBR NM 207:1999 no seu item [9.1.2], deve
suportar carga nominal e contrapeso. Mesmo que cada cabo, sozinho, consiga suportar
todo o peso, os elevadores utilizam múltiplos cabos de aço, em geral usando quatro cabos
ou mais, sendo que a norma estipula no mínimo três cabos (NBR NM 207:1999 no seu

39
item [9.1.3]). Ou seja, mesmo com a ruptura de um dos cabos, devido a redundância, a
cabina não despencará.
Caso uma eventual falha maior aconteça, por exemplo, todos os cabos se rompam,
o sistema de freio de emergência atuará freando a cabina e o contrapeso, evitando suas
quedas, conforme a norma NBR NM 207:1999 no seu item [9.7.1.1]. O sistema de
frenagem de emergência é ativado por força centrífuga e apresenta cabos que são presos
à cabina e passam pelo regulador/limitador de velocidade que gira livremente, como
mostrado na Figura 33 (foto salva durante um serviço de manutenção de um elevador
realizado pela empresa Crown Serviços de Elevadores). Estes cabos do sistema de
frenagem não têm função de sustentar a cabina, eles apenas ativam os freios. Como o
regulador tem uma faixa pré-determinada de velocidade, quando a velocidade da cabina
atinge esta velocidade máxima nominal pré-determinada do regulador, ele envia um
comando elétrico que provoca a parada imediata do elevador. Caso o comando elétrico
não pare o elevador, a força centrífuga do giro ativa travas que bloqueiam o regulador,
tensionando os cabos, que por sua vez ativam os freios de segurança, que se encontram
embaixo da cabina e do contrapeso, prendendo-os aos trilhos guias.
Figura 33 - Regulador de velocidade para sistema de emergência do elevador em
manutenção.
Modelos de regulador de velocidade podem ser vistos na Figura 34.
Figura 34 - Modelos de reguladores de velocidade para elevadores vendidos pela
Casa do Elevador, distribuidor exclusivo Elevatec [15].

40
Além do dispositivo regulador de velocidade enviar um comando de emergência, é
muito comum utilizar um relé de saída do inversor de frequência como mais um elemento
de segurança. Esse relé de saída opera e se fecha quando o status do inversor é OK, ou
seja, não apresentando nenhum alarme ou pronto para o funcionamento. Caso o inversor
apresente um defeito (sobretensão, sobrecorrente), sua saída trifásica é cortada e o relé de
saída muda de estado cortando a alimentação do freio eletromecânico, parando o
movimento da cabina.
Existem, também, sensores fim de curso no limite superior e inferior do poço do
elevador. A cabina não deve se chocar com o teto do poço, nem com o fundo, pois isso
seria um acidente gravíssimo. Quando a cabina encosta em um deles, um sinal é enviado
para o sistema de automação que corta a alimentação tanto do motor, quanto do freio
eletromecânico (o freio opera e trava o eixo do motor ao ser desenergizado), freando a
cabina. Na Figura 35, na foto à esquerda, há três sensores presos ao trilho sendo que o
mais embaixo é o limite final inferior do poço indicado com uma SETa vermelha e seu
tipo, dentre os fins de curso que existem, está indicado à direita da foto (foto salva durante
um serviço de manutenção de um elevador realizado pela empresa Crown Serviços de
Elevadores).
Figura 35 - À esquerda, limite final inferior e à direita, o tipo de fim de curso usado.
Os sistemas de automação de elevadores apresentam um circuito elétrico de
emergência com os contatos do dispositivo regulador de velocidade, do relé de saída do
inversor de frequência, dos fins de curso superior e inferior, todos em série, pois
usualmente seus contatos costumam ser normalmente fechados (NF). Qualquer sensor de
segurança a mais que seja adicionado, entraria em série com seu contato NF. Qualquer
emergência detectada por pelo menos um desses sensores, seu contato se abriria, abrindo
todo o circuito de emergência, executando as ações para parar a cabina imediatamente. É
possível usar a lógica inversa, com os contatos normalmente abertos (NA), todos em
paralelo. Quando pelo menos um deles detectar uma emergência, seu contato se fecha e
executa as ações para parar a cabina.

41
3.1.2. Sistema de Freio
O sistema de freio de um elevador é o conjunto formado por inversor de frequência,
máquina de tração e um freio eletromecânico que fica acoplado ao eixo do motor,
conforme a norma NBR NM 207:1999 em seu item [12.4.1.2]. O sistema de freio tem a
função tanto de desacelerar a cabina, quanto de mantê-la estacionada nos pavimentos. A
Figura 36 apresenta a máquina de tração (motor CA de indução conectado à uma redutora
de velocidade) e o freio eletromecânico acoplado ao eixo do motor CA (foto salva durante
um serviço de manutenção de um elevador realizado pela empresa Crown Serviços de
Elevadores).
Figura 36 - Máquina de tração do sistema de elevação em manutenção e seu freio
eletromecânico.
O conjunto responsável por desacelerar a cabina é o inversor de frequência junto com
o motor da máquina de tração. O inversor de frequência, instalado no quadro de comando,
diminui a frequência de saída que é enviada ao motor, e este vai reduzindo sua velocidade
e freando a cabina. Vale ressaltar que durante a frenagem, o motor pode operar como
gerador, já que o inversor obriga a frequência do estator a reduzir, enquanto a frequência
do rotor permanece maior, ou seja, a carga envia energia ao motor. Essa energia enviada
ao motor é transmitida ao inversor de frequência, que carrega seu barramento CC (banco
de capacitores). Isso faz com que deva ser ligado um resistor de frenagem ao inversor de
frequência para evitar que o banco de capacitor queime com sobretensão. Quando a tensão
ultrapassa um certo valor, o resistor dissipa essa energia sobressalente. A Figura 37
apresenta um quadro de comando VVVF (variable volTAGe, variable frequency), com
todas as suas placas de controle e inversor de frequência de marca Yaskawa, modelo
L1000E [16].

42
Figura 37 - Quadro de comando para elevador [16].
O freio eletromecânico (Figura 36) é responsável por manter a cabina estacionada nos
pavimentos. O freio eletromecânico é acoplado ao eixo do motor e freia o rotor quando
ele é desenergizado e libera o rotor quando ele é energizado, segundo a norma NBR NM
207:1999 no seu item [12.4.2.1]. Para o freio abrir, é preciso alimentar sua bobina com
corrente contínua e para mantê-lo aberto, deve ser mantido um fluxo de corrente contínua
constante segundo a norma NBR NM no seu item [12.4.2.3]. E ao desenergizar a bobina,
o freio atua através da força de molas. Isso é feito por uma questão de segurança, uma
vez que se houver falta de energia, é preciso que o motor seja freado, para evitar que o
elevador despenque com a ação da gravidade.
O inversor de frequência possui uma função, chamada “frenagem CC”, usada para
frear o motor eletricamente na parada da cabina, num momento antes do freio
eletromecânico se fechar. Essa função do inversor injeta corrente contínua nos
enrolamentos do motor do elevador, produzindo um campo magnético estacionário que
trava o rotor, criando um “freio elétrico”. Essa função do inversor de frequência só traz
mais segurança para o sistema, já que adiciona mais um tipo de freio ao sistema do
elevador. Além disso, esse “freio elétrico” por meio da frenagem CC é muito mais
imediato que o freio eletromecânico, que apresenta um atraso para sua operação (atraso
causado tanto por tempos de comutação de contatos elétricos quanto por operação
mecânica das sapatas de frenagem). Para contornar esse atraso e evitar que a cabina fique
“solta” por um breve momento na parada, é usada essa função de frenagem CC.
Uma forma de dar a partida no motor do elevador é liberando o freio eletromecânico
só quando o inversor de frequência já estiver enviando uma certa frequência (não muito
elevada) e consequentemente, enviando também uma tensão para o motor. Para isso, é

43
necessário que uma saída digital do inversor de frequência, programada para operar
quando uma certa frequência de saída for estabelecida, feche o circuito de alimentação do
freio eletromecânico, provocando sua abertura. Dessa forma é garantido que o motor
tenha torque para partir a carga após a abertura do freio.
Essas formas tanto de dar partida, quanto de frear o motor são para evitar que o motor
fique sem torque no seu eixo na partida e na parada justamente durante a operação do
freio eletromecânico. Caso o motor fique sem torque nesse breve momento, isso pode
acarretar um breve rollback, que ocorre quando o sistema cabina-contrapeso se move,
pela ação da gravidade, no sentido contrário do que a cabina tem de ir. Por exemplo, caso
a cabina esteja no primeiro andar, cheia de passageiros e todos queiram subir até o último
andar. Como o contrapeso é mais leve que a cabina cheia, durante a partida do motor, se
o freio eletromecânico se abrir e o motor não tiver torque de partida suficiente para
suspender a cabina, ela acaba descendo por um breve momento pois a força da gravidade
é superior a força do motor. Só depois que o motor escorregar e adquirir torque que ela
subirá. A sensação para o passageiro é de um tranco e isso traz desconforto, o que deve
ser evitado.
3.1.3. Máquina de Tração
Responsável pelo movimento do elevador, a máquina de tração (Figura 36) converte a
energia elétrica proveniente da rede em energia cinética para realizar o trabalho de
mover a cabina. Para a escolha da máquina de tração, existem alguns tipos de motores
no mercado como por exemplo: motor CC, motor CA de indução de uma velocidade,
motor CA de indução de duas velocidades, motor CA síncrono de imã permanente.
Nos dias atuais, os motores mais usados em elevadores são o motor CA de indução
e síncronos de imã permanente, cujos circuitos de acionamento baseiam-se em inversores
de frequência, por ser uma solução com controle de velocidade preciso e por atender a
todos os parâmetros de conforto e consumo de energia elétrica.
3.1.4. Portas de Pavimentos e de Cabina
Em elevadores, existem tanto a porta da cabina quanto as portas de pavimentos. A
bertura das portas ocorre somente quando a cabina estiver alinhada ao pavimento (NBR
NM 207:1999 no seu item [7.7.1]). O dispositivo que abre e fecha as portas é o operador
de portas. Esse fica fixado acima da cabina e as portas da cabina são acopladas a ele. A
Figura 38 mostra um operador de porta que abre somente a porta de cabina e destrinca as
portas de pavimentos quando a cabina se alinha a um andar (foto salva durante um serviço
de manutenção de um elevador realizado pela empresa Crown Serviços de Elevadores).
Esse operador não abre as portas de pavimentos (somente as destrinca) e estas são abertas
e fechadas pelos passageiros.

44
Figura 38 - Operador de portas.
Existem operadores de portas distintos no mercado, mas algumas características
são comuns entre eles, tais como: um motor para abrir e fechar as portas,
correias/cabos/hastes fixados ao motor e à porta de cabina, sensores de limite final de
porta aberta e porta fechada (podem ser contatos secos ou sensores mecânicos), sensor
infravermelho (barreira fotoelétrica) para evitar esmagamento de um passageiro que entre
ou saia da cabina com as portas se fechando. Outra característica comum nos operadores
de porta é uma estrutura mecânica móvel responsável por se acoplar a cada porta de
pavimento quando a cabina está alinhada a este. Essa estrutura mecânica móvel se chama
rampa articulada ou arrastador que tem o objetivo de destrincar mecanicamente as portas
de pavimentos e acoplar a porta da cabina à porta do pavimento, para que ambas abram e
fechem juntas.
A Figura 39 mostra como o operador de portas trinca e destrinca as portas de
pavimento. Quando a cabina chega no andar desejado, a porta da cabina se abre e a rampa
articulada realiza o movimento de destrincar a porta de pavimento. A rampa articulada
então desencosta da haste fazendo com que o “dente” se abaixe, destrincando
mecanicamente a porta de pavimento. Além da função de manter a porta de pavimento
trincada mecanicamente, o “dente” também suspende ou abaixa o contato elétrico seco
de porta de pavimento trincada. Quando o “dente” se abaixa, o contato seco se abre e o
sensor porta trincada fica falso. Esse comando elétrico, dentre outros, é enviado para o
quadro de comando que processa as informações e toma as devidas ações.

45
Figura 39 - Rampa articulada do operador de porta e sensores elétricos presentes nas
portas de pavimentos.

46
A norma NBR NM 207:1999, nos seus itens [7.7.4.1] e [7.7.4.2], exige um sensor
elétrico de trinco nas portas de pavimento. A porta de pavimento além de se fechar, ela
deve ser trincada, para evitar sua abertura quando a cabina não estiver alinhada ao
pavimento e, por segurança, para que nenhum passageiro corra o risco de cair no poço do
elevador. Para destrincar e abrir essa porta, sem a presença da cabina no pavimento,
somente com uso de uma chave especial (NBR NM 207:1999 no seu item [7.7.3.2]) para
uma eventual manutenção, por exemplo.
Por questões de segurança, o motor do elevador só pode operar e mover a cabina
caso todas as portas estejam fechadas. Ou seja, a porta de cabina deve estar fechada (NBR
NM 207:1999 no seu item [8.8.1]) e todas as portas de pavimentos devem estar fechadas
e trincadas (NBR NM 207:1999 no seu item [7.7.2.1]).
Logo, por segurança, os contatos dos sensores de trinco das portas de pavimento, os
contatos dos sensores das portas de pavimentos fechadas e os contatos dos sensores de
porta de cabina fechada, devem ser dispostos em série, caso sejam contatos NF
(normalmente fechados). Caso os contatos sejam NA (normalmente abertos), eles devem
ser dispostos em paralelo.
3.1.5. Sistema de Automação de Elevadores
O sistema de automação dos elevadores presentes no mercado é composto por algumas
placas de controle dedicadas e elas variam de empresa para empresa. Essas placas são
responsáveis por receber tanto sinais de sensores, quanto comando de outras placas e
enviam sinais de saída para executar ações externas.
A seguir, nas Tabelas Tabela 2 e
Tabela 3, são listadas as informações de entrada, ou seja, os sensores e botões mais
relevantes e presentes em provavelmente todos os comandos de elevador vendidos no
mercado, além das informações de saída, ou seja, as ações que devem ser executadas em
um sistema automatizado de elevador. Esta lista de informações de entrada e saída está
presente em [17].
Tabela 2 - Informações de entrada enviadas ao quadro de comando.
Botões de pavimento
Botões que se encontram em cada
pavimento. Em cada pavimento existe
um botão para chamada de subida e outro
para chamada de descida, feito para o
passageiro pressionar e indicar se quer
subir ou descer. Com exceção do
primeiro e último andar, que só tem um

47
botão indicando para subir e descer,
respectivamente.
Botões de cabina
Botões que se encontram no interior
da cabina. Normalmente são botões
numerados, indicando cada andar, ou até
mesmo siglas. Ao serem pressionados, o
elevador irá se encaminhar para o andar
desejado.
Botão abrir porta de cabina
Botão que se encontra dentro da
cabina e serve para abrir porta de cabina
quando essa ainda estiver se fechando.
Botão de emergência
Botão que se encontra do lado de fora,
na parte superior da cabina e na casa de
máquina. Ao ser pressionado deve parar
todo o sistema, interromper todas as
ações e desenergizar o motor e o freio
eletromecânico. Com isso o elevador
para.
Sensores de pavimento
Sensores que indicam que a cabina
está alinhada aos pavimentos. O motor,
no momento que a cabina estiver
alinhada ao pavimento, deve ser
parado/freado.
Sensores de corte de alta
velocidade de subida e de descida
Sensores que são responsáveis por
reduzir a velocidade da cabina antes dela
chegar ao pavimento. Esses sensores são
usados quando não há uso de encoder
que informa, com precisão, tanto ao
inversor de frequência quanto ao sistema
de automação a posição da cabina.
Sensor porta de cabina aberta
Sensor do tipo fim de curso que indica
que a porta da cabina está totalmente
aberta. Esse sensor se encontra no
operador de porta.
Sensor porta de cabina fechada
Sensor de segurança do tipo fim de
curso que indica que a porta da cabina
está totalmente fechada. Esse sensor se
encontra no operador de porta.
Sensores de corte de alta
velocidade na abertura e fechamento
de portas
Sensores responsáveis por reduzir a
velocidade das portas durante o
fechamento e a abertura, evitando que as

48
portas cheguem nos sensores fim de
curso em alta velocidade.
Sensores portas de pavimentos
fechadas
Sensores de segurança presentes em
cada porta de pavimento e têm a
finalidade de indicar se cada porta de
pavimento está fechada.
Sensores portas de pavimentos
trincadas
Sensor de segurança presente em cada
porta de pavimento, com a finalidade de
indicar se a porta de pavimento está
trincada mecanicamente, ou não.
Quando a porta de pavimento trinca
mecanicamente, o sensor, um contato
elétrico seco, por exemplo, é acionado.
Sensor inspeção fundo do poço
Sensor que se encontra no fundo do
poço e é usado no modo inspeção.
Quando o elevador perde a informação
do andar que se encontra, com uma falta
de luz por exemplo, é possível resgatar
essa informação realizando a inspeção e
posicionando a cabina no primeiro
andar. Quando a cabina estiver descendo
no modo inspeção e acionar o sensor
fundo do poço, ela deve parar e subir até
o primeiro pavimento.
Sensor de barreira infravermelho
Sensor usado na porta de cabina que
evita o esmagamento do passageiro
quando a porta estiver se fechando, NBR
NM 207:1999 [7.5.2.1.3]. Esse sensor é
composto de um emissor e um receptor.
No momento em que o passageiro passar
entre o emissor e o receptor
interrompendo o sinal de infravermelho
quando a porta estiver se fechando, a
porta deve abrir imediatamente para
evitar que o passageiro seja esmagado.
Inversor de frequência pronto
Os inversores de frequência
costumam ter relés de saída que operam
e se fecham quando o inversor está OK
(em bom funcionamento, sem nenhum
alarme). Esse relé é usado no circuito de
emergência.

49
Sensores limites finais
Sensores de emergência que se
encontram no limite inferior e superior
do poço. A cabina não pode ir muito
além deles, senão ela bate no fundo ou
no teto do poço. Logo eles são usados no
circuito de emergência. Se um desses
sensores for acionado, o motor tem de ter
sua alimentação cortada e a cabina deve
frear imediatamente por meio do freio
eletromecânico.
Dispositivo regulador de
velocidade
Sensor de emergência que fica no
regulador de velocidade. O sensor envia
um comando elétrico que desenergiza o
motor e o freio eletromecânico, freando
imediatamente o elevador.
Botão By Pass dos limites finais
Quando os sensores limites finais são
acionados devido a alguma emergência,
esse botão faz um by pass, permitindo
mover a cabina manualmente para cima
ou para baixo para retirá-la do limite e,
por exemplo, realizar uma manutenção.
Chave automática/manual
Chave que altera entre os modos
automático e manual do sistema do
elevador.
Botão geral (modo manual)
Botão que deve ser pressionado
simultaneamente com os botões de
subida manual ou descida manual para
mover a cabina manualmente.
Botão subida manual
Botão que move a cabina no sentido
de subida em modo manual, com uma
velocidade de inspeção. O botão geral
deve ser pressionado simultaneamente
com o botão de subida manual.
Botão descida manual
Botão que move a cabina no sentido
de descida em modo manual, com uma
velocidade de inspeção. O botão geral
deve ser pressionado simultaneamente
com o botão de descida manual.

50
Tabela 3 - Ações de saída enviadas pelo quadro de comando.
Abrir/fechar freio eletromecânico
O freio eletromecânico é acionado e
ele fecha quando é cortada sua
alimentação. A cabina só se move com
o freio eletromecânico aberto, ou seja,
com o freio energizado.
Subir cabina
Quando o acionamento é feito via
inversor de frequência, esse comando
deve ser enviado para o inversor de
frequência que irá girar o motor no
sentido de subir a cabina.
Descer cabina
Quando o acionamento é feito via
inversor de frequência, esse comando
deve ser enviado para o inversor de
frequência que irá girar o motor no
sentido de descer a cabina.
Abrir porta de cabina
Esse comando deve ser enviado para
o operador de portas que irá girar o
motor para abrir a porta.
Fechar porta de cabina
Esse comando deve ser enviado para
o operador de portas que irá girar o
motor para fechar a porta.
Velocidade alta
Quando o acionamento é feito via
inversor de frequência, esse comando
deve ser enviado para o inversor de
frequência que estabelecerá a
velocidade alta definida em um dos
parâmetros de multispeed do inversor.
Essa é a velocidade mais alta que o
elevador atinge durante sua viagem no
modo automático.
Velocidade média
Quando o acionamento é feito via
inversor de frequência, esse comando
deve ser enviado para o inversor de
frequência que estabelecerá a
velocidade média definida em um dos
parâmetros de multispeed do inversor.
Essa é a velocidade usada para o modo
inspeção.

51
Velocidade baixa
Quando o acionamento é feito via
inversor de frequência, esse comando
deve ser enviado para o inversor de
frequência que estabelecerá a
velocidade baixa definida em um dos
parâmetros de multispeed do inversor.
Essa é a velocidade mais baixa que o
elevador atinge durante sua viagem no
modo automático, usada para nivelar a
cabina ao pavimento antes da parada.
Display indicador de andar
Display que indica tanto sentido,
quanto o andar em que a cabina se
encontra.
Modo automático
Modo que o elevador opera
automaticamente, atendendo
normalmente aos passageiros.
Modo manual
Modo no qual o elevador não está
liberado para uso de passageiros, e está
sendo usado por uma equipe de
manutenção para reparar alguma falha
ou defeito.
Quanto ao movimento da cabina, o quadro de comandos envia informações ao inversor
de frequência pré-programado para operar o motor de tração e atender ao funcionamento
do sistema de elevação.
Elevadores devem transportar passageiros de forma segura e confortável. Dito isso, a
aceleração na partida e na frenagem devem ser confortáveis aos passageiros e para isso é
preciso construir uma curva de velocidade parametrizando as multispeeds no inversor de
frequência. As mudanças de velocidade ocorrem à medida que a cabina vai se movendo
e acionando os sensores posicionados pelos trilhos. A Figura 40 (foto salva durante um
serviço de manutenção de um elevador realizado pela empresa Crown Serviços de
Elevadores) mostra exemplo de sensores magnéticos para mudança de velocidades.
Figura 40 - Hastes de ferro na imagem à esquerda e sensores magnéticos à direita.

52
A curva de velocidade de um elevador segue aproximadamente o formato apresentado
na Figura 41 abaixo.
Figura 41 - Curva de velocidade.
Na Figura 41, F1, F2 e F3 são as diferentes frequências ou velocidades (multispeeds)
parametrizadas no inversor de frequência. São mostradas as rampas de aceleração e
desaceleração, sendo duas rampas de aceleração, a primeira com aceleração menor
(inclinação menor) e a segunda com aceleração maior (inclinação maior), enquanto só há
uma rampa de desaceleração. A mudança de curva de aceleração pode ser parametrizada
no inversor de frequência, enquanto a mudança das velocidades ocorre com o
acionamento dos sensores que existem nos trilhos. Há um sensor corte de alta velocidade,
que reduz a velocidade da frequência F3 para F1 e o sensor de pavimento que reduz a
velocidade da frequência F1 a zero. O formato da curva, ou seja, os valores
parametrizados no inversor de frequência e o posicionamento dos sensores ao longo dos
trilhos fica a critério do projetista ou engenheiro responsável.
3.2. Aspecto Construtivo da Maquete do Elevador de
Passageiros
Nesta seção serão listados e descritos todos os componentes que estarão presentes na
maquete do elevador, buscando fidelidade a um elevador real.
A maquete, Figura 42, apresenta as seguintes dimensões: 2 m de altura, 50 cm de
largura e 50 cm de profundidade. A maquete é composta por um motor de indução sem
redutora como máquina de tração; um freio eletromecânico; cabo de aço; cabina; porta de
cabina com motor CC; trilhos; sensores magnéticos e imãs; sensores mecânicos de fim de
curso; duas fontes CC para alimentar o sistema de automação e ventoinhas; um inversor

53
de frequência da WEG de modelo CFW300 para acionamento do motor de indução e três
CLPs da empresa Schneider Electric, dois deles de modelo SR2D101BD e um modelo
SR2B202BD.
Figura 42 - Maquete do elevador construída.
3.2.1. Máquina de tração
A máquina de tração da maquete é um motor de indução trifásico, de 6 polos,
velocidade nominal de 1130 RPM, com potência de 0,33 cv, 60 Hz. A Figura 43 mostra
o motor usado como máquina de tração e seus dados de placa.

54
Figura 43 - Motor de indução usado como máquina de tração e dados de placa.
Os enrolamentos do rotor foram ligados em delta/triângulo para poder alimentar o
motor com 220 Vca através da saída de tensão do inversor de frequência, aproveitando
uma corrente de linha maior para obter um torque maior.
Sabendo que o fluxo de entreferro é proporcional à corrente de armadura, o torque fica
proporcional ao quadrado da corrente de armadura. Ligando o motor em delta/triângulo,
o torque desenvolvido é o triplo do torque caso o motor fosse fechado em Y/estrela.
Como nessa maquete não foi usado contrapeso nem redutora de velocidade, pois seria
um trabalho mais complexo, demandando mais tempo e material, o motor traciona
diretamente a cabina. Ou seja, a máquina é de tração direta, e um eixo torneado foi
acoplado ao rotor do motor de indução. Este eixo torneado é feito de alumínio e o cabo
de aço foi fixado a ele. Já o cabo de aço foi conectado direto à cabina, puxando todo seu
peso além da sua carga.
3.2.2. Freio Eletromecânico
O freio eletromecânico foi desenvolvido com um freio de bicicleta, uma mola de
material resistente, hastes de ferro que servem como braço de alavanca e bobinas retiradas
de transformadores 127/220 Vca para 12/24 Vca, conforme Figura 44.
O freio de bicicleta foi fixado na cantoneira, e as pastilhas de borracha ficaram em
contato com o eixo torneado. A mola resistente foi presa aos braços do freio de bicicleta,
sempre fazendo uma força para fechar o freio, ou seja, as pastilhas de borracha estão
sempre fazendo força contra o eixo torneado. Para abrir o freio, foram usadas longas
hastes de ferro presas pelas pontas de cima ao freio de bicicleta. Já as pontas de baixo das
hastes estão inseridas nas bobinas dos transformadores que ao serem energizadas, atraem
as hastes para seu interior, abrindo o freio pois o torque da força magnética é superior ao
torque da força da mola. A Figura 44 apresenta o freio eletromecânico elaborado para
esse projeto.

55
Figura 44 - Freio eletromecânico da maquete do elevador.
Na Figura 45 são representadas as forças da mola e a magnética, além de seus braços
de alavanca. Os braços das forças magnéticas são hastes, indicadas em vermelho, bem
longas, justamente, para garantir que o torque produzido pela força magnética seja maior
que o torque produzido pela força da mola.
Figura 45 - Força magnética, força da mola e seus respectivos braços de alavanca
para cálculo dos torques.

56
Como o torque ( ) é calculado como o produto vetorial entre a força aplicada (𝐹 ) e o
braço de alavanca (𝑟 , distância da força aplicada até um ponto fixo) segundo a equação
(3).
= 𝑟 × 𝐹
(3)
| | = 𝑟. 𝐹. sin 𝜃
(4)
Teta (𝜃) é o ângulo formado entre a força aplicada e o braço de alavanca e “𝑟. sin 𝜃” é
a componente de 𝑟 perpendicular a 𝐹 .
Como dito, é necessário que o torque da força magnética fosse superior ao torque da
força da mola, ou seja:
𝑚𝑎𝑔 ≥ 𝑚𝑜𝑙𝑎
(5)
𝑟𝑚𝑎𝑔. 𝐹𝑚𝑎𝑔. sin 𝜃𝑚𝑎𝑔 ≥ 𝑟𝑚𝑜𝑙𝑎. 𝐹𝑚𝑜𝑙𝑎. sin 𝜃𝑚𝑜𝑙𝑎
(6)
Como não são conhecidos os módulos das forças magnética (𝐹𝑚𝑎𝑔) e da mola (𝐹𝑚𝑜𝑙𝑎),
nem mesmo os ângulos entre os braços de alavancas e as forças (𝜃𝑚𝑎𝑔 e 𝜃𝑚𝑜𝑙𝑎) e o valor
de 𝑟𝑚𝑜𝑙𝑎 é de aproximadamente 4 cm, foram utilizadas hastes de ferro bem compridas,
forçando que 𝑟𝑚𝑎𝑔 fosse um número elevado para garantir a veracidade da desigualdade
da equação (6).
Como foi realizado um teste de abertura de freio eletromecânico, e o torque da força
magnética das bobinas abriu o freio, significa que o tamanho das hastes escolhidas foi
mais que suficiente para satisfazer a desigualdade da equação (6).
Logo o freio eletromecânico é totalmente operável, sendo possível fazê-lo atuar,
freando o eixo do motor, além de fazê-lo abrir, liberando o eixo.
Foi escolhido alimentar a bobina de 220 Vca com 127 Vca para reduzir a corrente já
que o transformador foi desmontado e perdeu suas propriedades elétricas e térmicas.
Mesmo que a corrente seja menor nesse caso, o campo magnético gerou uma força para
atrair as hastes de ferro que, atuando sobre seu longo braço de alavanca, fez com que o
torque produzido pela força magnética fosse superior ao torque da mola. Embora a norma
NBR NM 207:1999 no seu item [12.4.2.3] indique o uso de corrente contínua para abrir
e manter o freio aberto, foi usado corrente alternada para o projeto desse freio, obtendo o
mesmo resultado. Esse freio foi feito para operar igual ao freio eletromecânico real,
segundo a norma NBR NM 207:1999 no seu item [12.4.2.1], freando quando não estiver
energizado e liberando o freio quando estiver energizado.
Conforme a Figura 45, é possível notar a presença de dissipadores acoplados às
bobinas e ventoinhas apontadas para as mesmas bobinas. Isso porque essas bobinas estão

57
superaquecendo, sendo possível que venham a queimar com uso constante. Isso ocorre
devido ao fato dessas bobinas não serem projetadas para receber tensão e circular uma
corrente nessas condições. A bobina de um transformador necessita de seu núcleo
ferromagnético para dissipar o seu calor, ao retirar o núcleo ferromagnético para utilizar
as bobinas para abrir o freio, o calor não se dissipa, podendo aquecer o fio da bobina e
possivelmente superaquecer o verniz do condutor até queimar a bobina. Os dissipadores
e ventoinhas soprando ar nas bobinas foram usados para contornar o problema do
superaquecimento, aumentando de dois minutos para aproximadamente quatro minutos
de uso constante, ou seja, podendo realizar mais chamadas consecutivas na maquete. Não
é um ganho muito significativo para uso constante, mas sim para um uso moderado entre
uma chamada e outra, deixando que o calor das bobinas dissipe com a presença dos
dissipadores e ventoinhas, aumentando o tempo de operação da maquete além dos quatro
minutos.
3.2.3. Cabo de Aço
O cabo de aço usado foi um cabo de 2 mm de diâmetro preso no topo da cabina. É um
cabo fino o suficiente para enrolar no eixo torneado no qual foi preso e resistente para
suportar a carga que ele vai puxar. A Figura 46 mostra o cabo de aço enrolado ao eixo
torneado.
Figura 46 - Cabo de aço enrolado ao eixo torneado.
O cabo não tem suas especificações da forma de confecção, nem sua tensão de ruptura
no rótulo de sua embalagem. Mas seguindo a tabela presente na Figura 47 que segue as
normas NBR ISO 2408:2008/ABNT NBR 6327 é possível aproximar quanto o cabo
suporta de carga antes de romper.
Para um cabo de aço com 2 mm de diâmetro, segundo a Figura 47, existem tensões de
ruptura diferentes, dependendo de seu diâmetro e de como o cabo de aço é confeccionado
[18].

58
Figura 47 - Confecções de cabos de aço e tabela com especificações [18].
Como só se sabe que seu diâmetro é de 2 mm, então de acordo com a tabela, existem
tensões de ruptura de 236, 255, 261 e 283 kgf. Supondo o pior cenário, com uma tensão
de ruptura de 236 kgf, o cabo suportaria uma carga de 236 kg antes de romper.
Como a carga a ser tracionada é muito inferior a isso, já que a cabina pesa
aproximadamente 6 kg e a carga adicional que o freio eletromecânico consegue segurar,
sem escorregar (foram feitos teste de carga para achar a carga máxima suportada pelo
freio eletromecânico), é de 6 kg, o cabo de aço de 2 mm é o suficiente para suportar, no
máximo, 12 kg de carga.
3.2.4. Cabina
A cabina tem formato de paralelepípedo feita com uma estrutura de ferro, uma tábua
de madeira em sua face inferior para ser o piso, e em suas faces laterais foram presas
cartolinas. O cabo de aço é preso na parte superior da cabina, bem no centro da estrutura.
E na face frontal, foi presa a porta da cabina, como mostrado na Figura 48.
Figura 48 - A cabina da maquete.

59
Além disso, oito roldanas foram presas nas arestas laterais da cabina, duas em cada
aresta, que vão guiar a cabina pelos trilhos. Cada roldana que foi presa à cabina pode se
mover minimamente para um lado e para o outro devido ao uso de parafusos compridos
e molas. Esse movimento é necessário para evitar que as roldanas escapem dos trilhos.
Mesmo que os trilhos não estejam perfeitamente retos, isso as mantém presas a eles.
3.2.5. Porta de Cabina
A porta da cabina foi feita aproveitando uma bandeja de CDs de aparelho de som. A
bandeja foi retirada do aparelho de som e já que apresenta um motor CC de 5 V usado
para abrir e fechar a bandeja, foi adaptada para ser a porta da cabina. O motor CC foi
usado, junto com a ponte H, para abrir e fechar a porta de cabina. A Figura 49 mostra a
porta da cabina.
Figura 49 - Porta da cabina da maquete e ponte H.
Um elevador real apresenta porta de cabina e portas de pavimentos. Nessa maquete
não existem as portas de pavimentos, ou seja, a porta de cabina vai simular o
funcionamento dos dois tipos de porta ao mesmo tempo.
A porta da cabina só deve se abrir em duas situações: quando o elevador se alinhar a
um pavimento, abrindo porta para o passageiro entrar ou sair da cabina; ou quando um
passageiro, dentro da cabina estacionada, apertar o botão abrir porta enquanto a porta da
cabina estiver se fechando, para ela reabrir. Nas duas situações, a cabina está estacionada
em um pavimento, podendo realizar abertura e fechamento de porta.
Segundo as normas NBR NM 207:1999 nos seus itens [8.8.1] e [7.7.2.1], o motor do
elevador só pode operar e mover a cabina se a porta da cabina estiver fechada e todas as
de pavimento estiverem fechadas e trincadas. Como a maquete não apresenta portas de
pavimentos, para simular o funcionamento real de um elevador dentro das normas,
enquanto a porta de cabina da maquete não estiver fechada, o motor permanecerá

60
desligado. O motor só irá operar e mover a cabina se a porta da cabina da maquete estiver
fechada. Por isso o sistema de automação proposto interrompe o movimento da cabina
quando a porta da cabina se abre.
Para simular, na maquete, alguma emergência com as portas de um elevador, foi criada
uma função adicional ao botão abrir porta. Esse, ao ser pressionado enquanto a cabina
estiver se movimentando, abre a porta e nesse momento, a cabina deve parar seu
movimento (o motor deve receber o comando STOP do inversor de frequência e o freio
eletromecânico deve ser desenergizado, freando o eixo do motor) e ao liberar o botão, a
cabina deve voltar a realizar seu movimento (motor deve receber o comando RUN do
inversor e o freio deve ser energizado novamente, liberando o eixo).
Foram posicionados sensores magnéticos e um imã na porta da cabina para detectar se
a porta está aberta ou se a porta está fechada de acordo com a Figura 50.
Figura 50 - Sensores magnéticos da porta da maquete.
Uma melhor explicação, de como foi elaborado o GRAFCET para o funcionamento
da porta de cabina e a conversão para ladder, mostrando quais sensores foram usados e
as ações de saída, será apresentada no capítulo 4.
3.2.6. Trilhos
Os trilhos foram feitos com cantoneiras de ferro com perfil L, de ¾ de polegada de
largura e toda a estrutura tem, aproximadamente, dois metros de altura. Sensores
magnéticos foram presos nos trilhos e um imã fica preso em uma das roldanas. À medida

61
que a cabina se move, o imã, preso à roldana, passa pelos sensores magnéticos, enviando
os sinais às entradas dos CLPs.
A Figura 51 mostra os trilhos e as roldanas e sensores magnéticos presos a eles.
Figura 51 – Trilhos, roldanas e sensores magnéticos.
3.2.7. Sensores Magnéticos e Imãs
Neste trabalho foram usados sensores magnéticos que foram posicionados por toda a
estrutura a fim de informar os eventos que ocorrem no sistema do elevador para os CLPs.
A Figura 52 apresenta os sensores magnéticos usados no projeto.
Figura 52 - Sensores magnéticos usados na maquete.
Na Tabela 4, estão os sensores magnéticos presentes nos circuitos, listados por nome
(nomes usados no programa Zelio soft 2) e os eventos externos que eles informam aos
CLPs.

62
Tabela 4 - Sensores magnéticos e suas funções.
Sensores Eventos externos
Sensor fundo do poço
Informa que a cabina chegou no fundo
do poço, ou seja, está abaixo do primeiro
pavimento.
Sensor 1º pavimento Informa que a cabina chegou ao
primeiro pavimento.
Sensor 2º pavimento Informa que a cabina chegou ao
segundo pavimento.
Corte de alta sobe
Informa que a cabina está no sentido de
subida e deve mudar da velocidade alta
para velocidade baixa.
Corte de alta desce
Informa que a cabina está no sentido de
descida e deve mudar da velocidade alta
para velocidade baixa.
Sensor porta fechada
Informa que a porta da cabina está
fechada.
Esse sensor quando está ativado
representa a ativação dos seguintes
sensores, presentes em um sistema de
elevação real, ligados em série: sensor
porta da cabina fechada, sensores porta de
pavimentos fechadas e sensores porta de
pavimentos trincadas.
Esse sensor quando está desativado
representa a desativação de pelo menos
um dos seguintes sensores, ligados em
série: sensor porta da cabina fechada,
sensores porta de pavimentos fechadas e
sensores porta de pavimentos trincadas
Sensor porta aberta Informa que a porta da cabina está
aberta.
3.2.8. Sensores Mecânicos de Fim de Curso
Existem dois sensores mecânicos de fim de curso presos aos trilhos. Eles são
posicionados no limite superior e no limite inferior do poço da maquete, e são
responsáveis pela parada da cabina caso sejam acionados. A Figura 53 mostra o tipo de
sensor utilizado.

63
Figura 53 – Tipo de sensor fim de curso usado para limite superior e inferior.
Caso ocorra alguma emergência, ou algum mal funcionamento do sistema de
automação, a cabina pode se dirigir a um desses limites, tanto superior, quanto inferior, e
se chocar no topo ou no fundo da estrutura da maquete. Na vida real isso seria um acidente
gravíssimo, logo os sensores fim de curso nos sistemas de automação de um elevador são
fundamentais para permitir o acionamento dos freios e a parada da cabina. Esses limites
estão ligados em paralelo com o botão emergência da maquete, já que eles apresentam a
mesma função, cessar o movimento da cabina.
3.2.9. Painel de botões
Foi utilizado um painel de botões para comandar o elevador. A Figura 54 apresenta o
painel de botões com suas funções indicadas.
Figura 54 - Painel de botões da maquete.

64
Um elevador apresenta inúmeros botões por todo seu circuito (por exemplo, botões
dentro da cabina, botões em cada pavimento e etc). Porém a maquete construída reúne
todos os botões em um único painel para facilitar a utilização. A
Tabela 5 contém os botões e as funções atribuídas a eles.
Tabela 5 - Botões da maquete e suas funções.
Botão primeiro
pavimento
Botão que ficaria instalado no primeiro pavimento. Ao
ser pressionado, indica que o passageiro quer chamar o
elevador, ou seja, o elevador deve ir até o primeiro
pavimento.
Botão segundo
pavimento
Botão que ficaria instalado no segundo pavimento. Ao
ser pressionado, indica que o passageiro quer chamar o
elevador, ou seja, o elevador deve ir até o segundo
pavimento.
Botão primeiro
andar cabina
Botão que ficaria instalado no interior da cabina. Ao ser
pressionado, indica que o passageiro está no interior da
cabina e deseja ir para o primeiro pavimento.
Botão segundo
andar cabina
Botão que ficaria instalado no interior da cabina. Ao ser
pressionado, indica que o passageiro está no interior da
cabina e deseja ir para o segundo pavimento.
Botão abrir porta
Botão que ficaria instalado no interior da cabina. Esse
apresenta duas funções.
Sua função normal: ao ser pressionado enquanto a porta
estiver se fechando, a porta se reabrirá.
Foi adicionada uma outra função: simular uma falha de
porta enquanto a cabina estiver se movendo. Ao ser
pressionado enquanto a cabina estiver se movendo, a porta
se abre, o motor deve ser freado e o freio eletromecânico
ser ativado imediatamente.
Botão inspeção
Botão que ficaria instalado na casa de máquinas. Esse
botão é pressionado quando o sistema do elevador não sabe
a posição de sua cabina. Ou seja, ao ser pressionado, o
sistema desce a cabina até o fundo do poço e em seguida
posiciona a cabina no primeiro pavimento.
Botão emergência
Botão que ficaria instalado na casa de máquinas. Ao
pressionar esse botão, a cabina deve ser parada
imediatamente pelo freio eletromecânico, o motor deve ser
desenergizado e todos os CLPs devem ser forçados a suas
etapas iniciais.

65
3.2.10. Fontes CC
Existem duas fontes de corrente contínua nessa maquete. Uma das fontes apresenta
tensão de entrada 127/220 Vca e saída 24 Vcc, 14,1 A mostrada na Figura 55.
Figura 55 - Fonte de 24 Vcc.
A segunda fonte usada para alimentar o motor da porta da cabina tem entrada de
tensão alternada 127 /220Vca e saída 5 Vcc, 1,2 A mostrada na Figura 56.
Figura 56 - Fonte CC de 5 Vcc.
A fonte da Figura 55 foi usada para alimentar os três CLPs e todos os seus bornes de
entrada e saída; os bornes de controle do inversor de frequência; a bobina do relé que
energiza o freio eletromecânico; as bobinas dos relés da ponte H usada para operar o
motor CC da porta da cabina e as ventoinhas que resfriam as bobinas do freio
eletromecânico, já que todos esses itens funcionam com alimentação de 24 Vcc. Já a fonte

66
da Figura 56 foi usada na alimentação do motor da porta da cabina, para alimentar a sua
armadura, já que a alimentação do motor é de 5 Vcc.
Segundo os dados presentes em [19], foi montada a Tabela 6 com a carga exigida pelos
dois CLPs modelo SR2D101BD.
Tabela 6 - Carga exigida pelos dois CLPs SR2D101BD.
Corrente de alimentação do CLP 100 mA (x 2)
Corrente dos bornes de entrada 4 mA (x 12)
Corrente de borne de saída ligado às
bobinas dos relés da ponte H 15 mA (x 2)
Corrente de borne de saída ligado em
outros bornes de entrada dos CLPs 4 mA (x 6)
Soma total (S1) S1 = 0,302 A
Segundo os dados presentes em [20] a respeito do CLP modelo SR2B202BD e dos
dados em [21] a respeito do inversor de frequência CFW300, foi elaborada a Tabela 7.
Tabela 7 - Carga exigida pelo CLP SR2B202BD e pelo inversor de frequência
CFW300.
Corrente de alimentação do CLP 100 mA (x 1)
Corrente dos bornes de entrada 4 mA (x 12)
Corrente de borne de saída ligado em
outros bornes de entrada dos CLPs 4 mA (x 2)
Corrente de borne de saída ligado aos
bornes de entrada do inversor de frequência
4 a 20 mA (x 6)
(foi usado valor de 20 mA para
cálculo de carga)
Soma total (S2) S2 = 0,276 A
As duas ventoinhas de 12 Vcc exigem, cada uma, correntes de 150 mA e de 160 mA.
Para obter a tensão de 12 Vcc, foi usado um regulador de tensão 7812 para alimentar as
ventoinhas. A tensão de entrada do regulador é de 24 Vcc para obter em sua saída 12 Vcc.
A corrente de saída que o regulador consegue suportar é de 1 A, ou seja, o regulador
suporta a corrente total das duas ventoinhas de 310 mA. Além disso, existe ainda a carga
exigida pela bobina do relé que aciona o freio eletromecânico. Com isso foi montada a
Tabela 8.
Tabela 8 - Carga exigida pelo relé do freio eletromecânico e por duas ventoinhas.
Corrente da bobina do relé que aciona
circuito do freio eletromecânico 15 mA (x 1)
Corrente das ventoinhas 150 + 160 mA
Soma total (S3) S3 = 0,325 A

67
Calculando a soma da carga total (S1+S2+S3, equação (7)) é possível perceber que a
fonte de 24 Vcc consegue alimentar todas as cargas.
𝑆𝑜𝑚𝑎 𝑐𝑎𝑟𝑔𝑎 𝑡𝑜𝑡𝑎𝑙 = 𝑆1 + 𝑆2 + 𝑆3 = 0,953 𝐴
(7)
𝐶𝑜𝑟𝑟𝑒𝑛𝑡𝑒 𝑚á𝑥𝑖𝑚𝑎 𝑑𝑒 𝑠𝑎í𝑑𝑎 𝑑𝑎 𝑓𝑜𝑛𝑡𝑒 𝑑𝑒 24 𝑉𝑑𝑐
14,1 𝐴 > 0,953 𝐴
(8)
Já a outra fonte de tensão de 5 Vcc com corrente de saída de 1,2 A atende a carga do
motor CC de 5 Vcc.
3.2.11. Inversor de Frequência da WEG, CFW300
Foi usado o inversor de frequência, modelo CFW300A07P3S2NB20, com entrada
monofásica 200-240 Vca, corrente de entrada de 16,1 A e frequência de entrada de
50/60 Hz. Sua tensão de saída é trifásica podendo alcançar no máximo à tensão de entrada,
ou seja, 0-Rede Vca, com uma corrente de saída de até 7,3 A, podendo alcançar uma
frequência de saída de 400 Hz, Figura 57. A rede usada para alimentar todo o sistema da
maquete tem dois níveis de tensão, tanto 127 Vca e 220 Vca.
Figura 57 - Inversor de frequência modelo CFW300A07P3S2NB20.

68
O inversor CFW300 foi escolhido pois atende ao motor de indução trifásico usado na
maquete como máquina de tração. Seu rotor foi ligado em 220 Vca triângulo/delta e a
rede que o alimenta é de 220 Vca. Além disso, a corrente de saída do inversor é maior
que a corrente nominal do motor, o que é suficiente para atender a sua carga.
Os seus bornes de controle foram alimentados com uma fonte externa de 24 Vcc, como
mencionado anteriormente, e quando energizados exigem uma corrente de 4 a 20 mA.
Para isso, é necessário parametrizar o inversor e colocar o parâmetro P271=1, pois assim
as entradas digitais DI1, DI2, DI3, DI4 podem receber e serem ativadas pela tensão de 24
Vcc (configuração PNP), permitindo o uso de uma fonte externa. A ligação é feita
segundo a Figura 58 presente em [21].
Figura 58 - Configuração PNP.
O inversor foi parametrizado, seguindo o manual, para controlar o motor de indução e
fazê-lo operar como um motor de elevador, ou seja, o motor vai apresentar algumas
velocidades de operação (velocidade baixa, alta e de inspeção), deve mudar o sentido de
giro (para subir e descer a cabina), conter tempos de aceleração e desaceleração e realizar
frenagem CC.
Inicialmente, são modificados os parâmetros P296, P297, P399, P400, P401, P402,
P403, P404 e P409. A Tabela 9 foi preenchida identificando cada parâmetro e seus
respectivos valores. Alguns desses valores são obtidos a partir dos dados de placa do
motor, ou seja, sua tensão nominal, corrente nominal, rotação nominal, frequência
nominal e a potência nominal, conforme Figura 43.
A frequência de chaveamento dos IGBTs é de 5 kHz. O rendimento do motor não é
mencionado nos dados de placa, logo o parâmetro padrão de fábrica não foi modificado,
67%. Já a resistência do estator foi adquirida com o autoajuste, colocando o parâmetro
P202=5 (método de controle VVW – volTAGe vector WEG) e em seguida o parâmetro
P408=1 para iniciar o autoajuste (o inversor injeta corrente contínua no estator e através
da medição corrente e tensão, determina a resistência).

69
Tabela 9 - Parâmetros do motor inseridos no inversor de frequência.
Parâmetro Descrição Valor (unidade)
P296 Tensão nominal da rede 2 = 200 / 240 Vca
P399 Rendimento nominal do motor 67 (%)
P400 Tensão nominal do motor 220 (Vca)
P401 Corrente nominal do motor 1.7 (A)
P402 Rotação nominal do motor 1130 (rpm)
P403 Frequência nominal do motor 60 (Hz)
P404 Potência nominal do motor 2 = 245 (W) ou 1/3 cv
P409 Resistência do estator 56,50 (Ω)
Em seguida foi definido que o inversor vai ser comandado remotamente. A origem da
referência de frequência remota foi definida no parâmetro P222, fazendo P222=8
(multispeed), podendo ser estabelecidas 8 velocidades diferentes, conforme Figura 59.
Figura 59 - Parâmetros de multispeed.
Logo, é necessário definir a seleção de giro remota, fazendo o parâmetro P226=4
(DIx). E definir os parâmetros P263, P264, P265 e P266 que representam,
respectivamente, as entradas digitais DI1, DI2, DI3 e DI4. Ou seja, as entradas digitais
são usadas para controlar o sentido de giro e as multivelocidades. Para isso, os parâmetros
foram definidos como P263=4 (sentido de retorno), P264=5 (sentido de avanço),
P265=13 (multispeed) e P266=13 (multispeed).
A Figura 58 mostra os bornes do inversor de frequência e a Tabela 10 apresenta as
funções dos bornes.

70
Tabela 10 - Funções dos bornes do inversor de frequência.
Bornes Funções
DI1 Sentido Desce (P263=4)
DI2 Sentido Sobe (P264=5)
DI3 Multispeed (P265=13)
DI4 Multispeed (P266=13)
GND Onde é ligado o negativo da fonte CC
Relé NF Contato normalmente fechado do relé
Relé COMUM Contato comum do relé
Relé NA Contato normalmente aberto do relé (P275=2)
O parâmetro P275 define a função da saída digital DO1. Fazendo P275=2, o contato
NA do relé de saída se fecha para F ≥ Fx (F é a frequência de saída (P002) e Fx é a
frequência definida em P281). Fx foi definida como P281=4,5 Hz. Ou seja, quando a
frequência de saída for maior que 4,5 Hz o contato NA do relé de saída vai se fechar. Esse
relé é usado para abrir e fechar o freio eletromecânico.
O contato NA do relé da saída digital do inversor ao se fechar, alimenta com 24 Vcc a
bobina de outro relé que suporta uma corrente maior, 10 A. Ao ser alimentado, ele fecha
seu contato e permite que a rede (127 Vca) alimente as bobinas do freio eletromecânico,
liberando o eixo para girar.
Como as duas bobinas usadas no sistema do freio eletromecânico consomem no total
em torno de 1,4 A, corrente maior que a corrente suportada pelo relé de saída do inversor,
0,5 A, foi utilizado outro relé de 10 A que suporta mais corrente para a tensão de 120
Vca, Figura 60.
Figura 60 - Relé do freio eletromecânico.
Os bornes de multispeed, DI3 e DI4, podem ser considerados bits que definem as
velocidades de operação do elevador, conforme uma combinação binária de acordo com
a Tabela 11. O bit 0 indica que o borne está sem alimentação, 0 V, e o bit 1 indica que o
borne está recebendo 24 V. Na Tabela 11 são mostrados os parâmetros P124, P125, P126
e P127 respectivos às velocidades de operação.

71
Tabela 11 - Parametrização das velocidades da maquete.
Nível lógico dos bornes
D3 D4 Velocidade
parametrizada (Hz) Parâmetro
0 0 0 P124
0 1 20 P125
1 0 7,5 P126
1 1 15 P127
Quando a cabina estiver parada (0 Hz) nenhum dos bornes estará recebendo 24 V, ou
seja, nível lógico zero. Para a cabina se mover em velocidade baixa, de 7,5 Hz, só o borne
D3 receberá 24 V, ou seja, nível lógico um. Já a velocidade de inspeção, de 15 Hz, ambos
os bornes estão energizados. E a velocidade alta, de 20 Hz, somente o borne D4 recebe
24 V.
Também foram definidos os tempos de aceleração e desaceleração nos parâmetros
P100 e P101 respectivamente, Tabela 12.
Tabela 12 - Parametrização dos tempos de aceleração e desaceleração.
Parâmetro Função Tempo (s)
P100 Tempo de aceleração 2
P101 Tempo de desaceleração 0,1
O tempo de aceleração é definido como o tempo necessário para sair da velocidade
zero até a frequência máxima (parâmetro P134). Já o tempo de desaceleração é definido
como o tempo para sair da velocidade máxima até a velocidade zero.
O tempo de desaceleração ficou bem reduzido, 0,1 s, pois durante o modo inspeção, a
cabina desce até o fundo do poço e sobe até o primeiro pavimento. Quando o sensor fundo
do poço for ativado, o motor deve desacelerar a cabina rapidamente, para evitar que a
cabina bata no fundo do poço ou mesmo acione o sensor limite inferior que acusaria uma
emergência. Por isso a desaceleração deve ocorrer em um curto período.
Definem-se a frequência mínima e máxima que o inversor vai operar nos parâmetros
P133 e P134. A frequência mínima foi definida como P133=4,5 Hz e a máxima P134=
60 Hz. A frequência máxima foi definida como 60 Hz já que é a frequência nominal do
motor de acordo com seus dados de placa da Figura 43. Com isso, podemos construir a
curva V/f da Figura 61.

72
Figura 61 - Curva V/F parametrizada [12].
De acordo com a Figura 61, P142 é a tensão de saída máxima do inversor e é definido
como P142=100% da tensão de entrada (220 Vca). P145 é a frequência de
enfraquecimento de campo, definida como P145=P134=60 Hz. P143 é uma tensão
intermediária definida como P143=30% da tensão de entrada (220 Vca). P146 é a
frequência intermediária e foi definida como P146=20 Hz, velocidade máxima da cabina.
P136 é um boost de torque manual, ou seja, é um aumento da tensão de saída do inversor
para compensar a queda de tensão na resistência estatórica em baixas frequências, e seu
valor foi definido como P136=5% (valor suficiente para partir o motor e levantar a
cabina).
Como o tipo de controle definido no projeto foi o escalar V/f, o parâmetro P202 deve
ser definido como P202=0, já que é um controle que se adequa ao caso de um elevador
que tem uma carga que não varia no tempo, ou seja, o torque é constante durante todo o
percurso da cabina.
Por fim, são definidos os parâmetros P300, P301 e P302 respectivos a frenagem CC
usada na parada da cabina. A Tabela 13 lista esses parâmetros, suas descrições e seus
valores.
Tabela 13 - Parâmetros de frenagem CC.
Parâmetros Descrição Valor (unidade)
P300 Tempo de frenagem CC na parada 0,5 (s)
P301 Frequência de início da frenagem CC 4,5 (Hz)
P302 Tensão na frenagem CC 40 (%)
Nesse projeto, só foi usado frenagem CC na parada da cabina. A frenagem CC
funciona de acordo com a Figura 62.

73
Figura 62 - Funcionamento do inversor na frenagem CC [12][16].
A frenagem CC ocorre quando a frequência de saída for menor que a frequência em
P301. Assim que a frenagem CC ocorrer, o inversor de frequência permanece injetando
corrente contínua por um tempo P300.
A frequência de início da frenagem CC foi definida como 4,5 Hz, justamente porque
a velocidade baixa também é 4,5 Hz. Ou seja, quando a cabina estiver se aproximando do
pavimento no qual ela deve parar, a cabina, primeiramente, reduzirá da velocidade alta
para a velocidade baixa ao passar pelo sensor corte de alta velocidade e em seguida deve
frear quando passar no sensor do pavimento. Como a cabina ao se aproximar do
pavimento vai estar em velocidade baixa, quando passar no sensor de pavimento, o
inversor de frequência vai reduzir a velocidade de 4,5 Hz para zero. Como a frequência
de saída vai cair abaixo de 4,5 Hz, imediatamente o inversor vai realizar a frenagem CC.
Logo a cabina pára com 2 tipos de freios, um elétrico (frenagem CC) e um
eletromecânico. A frenagem CC deve durar enquanto os dois relés levam seu tempo para
operar e o freio eletromecânico leva seu tempo para frear o eixo do motor.
Olhando as referências [22], [23] e [24] que são datasheets de relés e contatores e a
referência [25], datasheet de freios eletromagnéticos existentes no mercado, os tempos
de operação de relés e contatores são muito pequenos, da ordem de 10 ms de fechamento
e 5 ms de abertura para contatos de relés e 40 ms fechamento e 10 ms abertura para
contatos de contatores. Já para operar freios eletromagnéticos, o tempo para seu
fechamento é da ordem de 0,2 s. Ou seja, o tempo de duração da frenagem CC, P300,
deve ser maior que a soma dos tempos de fechamento do freio eletromagnético e dos
tempos de abertura dos contatos de dois relés.
𝑃300 > 𝑡𝑓𝑟𝑒𝑖𝑜 + 𝑡𝑎𝑏𝑒𝑟𝑡𝑢𝑟𝑎 𝑟𝑒𝑙é1 + 𝑡𝑎𝑏𝑒𝑟𝑡𝑢𝑟𝑎 𝑟𝑒𝑙é2
(9)
𝑃300 > 0,2 + 0,005 + 0,005
(10)
𝑃300 > 0,201 𝑠
(11)

74
Neste trabalho optou-se por um tempo de frenagem CC ainda maior, P300 = 0,5 s, pois
o freio eletromecânico construído nesse projeto, obviamente, tem uma performance pior
que os freios vendidos no mercado. Ou seja, considerando o dobro do tempo para ele
operar, P300 deve ser maior que 0,401 s.
𝑃300 > 2. 𝑡𝑓𝑟𝑒𝑖𝑜 + 𝑡𝑎𝑏𝑒𝑟𝑡𝑢𝑟𝑎 𝑟𝑒𝑙é1 + 𝑡𝑎𝑏𝑒𝑟𝑡𝑢𝑟𝑎 𝑟𝑒𝑙é2 (12)
𝑃300 > 2 × 0,2 + 0,005 + 0,005 (13)
𝑃300 > 0,401 𝑠 (14)
𝑃300 = 0,5 𝑠 (15)
3.2.12. Controladores Lógicos Programáveis da Schneider
Electric
Nesta subseção são apresentados os dados dos três CLPs usados neste projeto e quais
circuitos eles implementam.
Os dois CLPs de modelo Zelio Logic SR2D101BD, Figura 63, foram usados para fazer
o circuito de inspeção e o circuito de porta do elevador. A Tabela 14 apresenta suas
especificações [19].
Figura 63 - Os dois CLPs modelo SR2D101BD.

75
Tabela 14 - Características gerais dos CLPs SR2D101BD.
Zelio Logic SR2D101BD
Descrição Valor
Número de linhas de programa 240 para diagrama ladder
Tempo de varredura 6 – 90 ms
Tensão de alimentação 24 Vcc (limites 19,2 – 30 Vcc)
Corrente de alimentação 100 mA
Número de entradas digitais 6
Tensão das entradas digitais 24 Vcc
Corrente das entradas digitais 4 mA
Tensão que garante estado lógico 1 ≥15 V
Tensão que garante estado lógico 0 ≤5 V
Corrente que garante estado lógico 1 ≥2,2 mA
Corrente que garante estado lógico 0 ≤0,75 mA
Número de saídas digitais 4 relés de saída
Tensão das saídas digitais 24 – 250 Vca
5 – 30 Vcc
Corrente das saídas digitais 8 A
O CLP de modelo Zelio Logic SR2B202BD, Figura 64, foi usado para fazer o circuito
principal do elevador. A Tabela 15 apresenta suas especificações [20].
Figura 64 - CLP modelo SR2B202BD.

76
Tabela 15 - Características gerais do CLP SR2B202BD.
Zelio Logic SR2B202BD
Descrição Valor
Número de linhas de programa 240 para diagrama ladder
Tempo de varredura 6 – 90 ms
Tensão de alimentação 24 Vcc (limites 19,2 – 30 Vcc)
Corrente de alimentação 100 mA
Número de entradas digitais 12
Tensão das entradas digitais 24 Vcc
Corrente das entradas digitais 4 mA
Tensão que garante estado lógico 1 ≥15 V
Tensão que garante estado lógico 0 ≤5 V
Corrente que garante estado lógico 1 ≥2,2 mA
Corrente que garante estado lógico 0 ≤0,75 mA
Número de saídas digitais 8 transistores de saída
Tensão das saídas digitais 24 Vcc (limites 19,2 – 30 Vcc)
5 – 30 Vcc
Corrente das saídas digitais 0,5 – 0,625 A
Nos capítulos 4 e 5 serão explicados como foi elaborado o GRAFCET global que
controla o sistema da maquete e o método proposto de conversão de GRAFCET em
diagrama ladder.

77
4. Modelagem
Inicialmente será apresentada a Figura 65 que tem o intuito de detalhar o circuito
geral, ou seja, como a rede é ligada ao circuito e cada ligação entre os equipamentos,
além de indicar o posicionamento de cada sensor e botão na maquete. A Figura 65
apresenta de forma simplificada os circuitos de controle (circuito de inspeção, circuito
de porta e circuito principal) que serão especificamente detalhados mais adiante neste
capítulo.
Figura 65 - Circuito geral do sistema de automação proposto para a maquete com os
circuitos de controles simplificados.
Diante do circuito geral da maquete, a fim de automatizar seu funcionamento,
respeitando as características expostas no capítulo 3, foi criado um GRAFCET global que
descreve o comportamento a ser controlado do sistema de elevação proposto.
O GRAFCET global é composto por 6 GRAFCETs parciais que se encontram na
Figura 66, Figura 67 e Figura 68. O par de GRAFCET G1 e G4 descreve o
comportamento do circuito de inspeção, o par G2 e G5 o comportamento do circuito da
porta e o par G3 e G6 o comportamento do circuito principal.

78
Figura 66 - GRAFCETs parciais G1 e G4 que representam o circuito de inspeção.
Figura 67 - GRAFCETs parciais G2 e G5 que controlam o circuito de porta.

79
Figura 68 - GRAFCETs parciais G3 e G6 que controlam o circuito principal.
Ou seja, primeiramente, vale apresentar como foram elaborados os circuitos de
inspeção, de porta e o principal, mostrando as entradas e saídas para cada CLP a fim de
explicar a construção do GRAFCET global do sistema da maquete, e em seguida
apresentar a conversão dos GRAFCETs em diagrama ladder.
4.1. Circuito de inspeção
O circuito de inspeção, representado pelos GRAFCETs parciais G1 e G4, é
apresentado na Figura 69 e para controlar essa parte do circuito foi usado o CLP de
modelo SR2D101BD que apresenta seis entradas digitais e quatro saídas digitais. As
entradas do CLP são consideradas variáveis de entrada que podem ser usadas como
receptividade das transições presentes nos dois GRAFCETs em questão e cada saída do
CLP contém uma, ou mais de uma, ação contínua associada às etapas dos GRAFCETs.
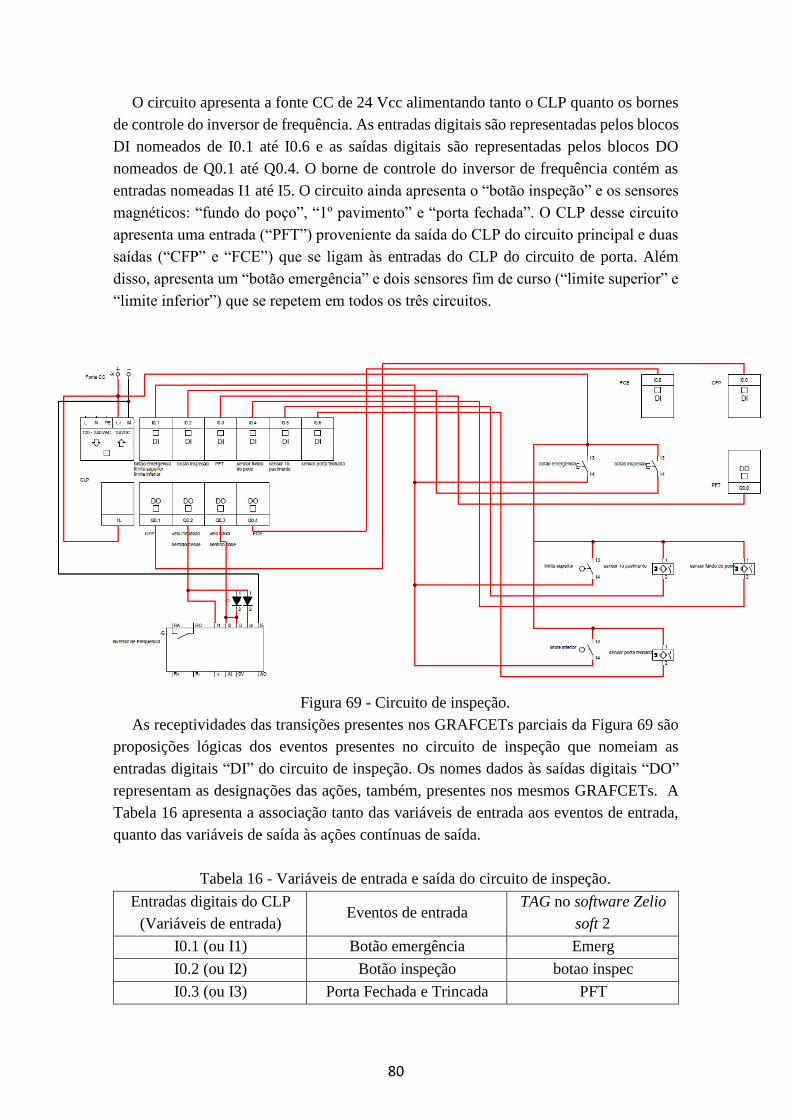
80
O circuito apresenta a fonte CC de 24 Vcc alimentando tanto o CLP quanto os bornes
de controle do inversor de frequência. As entradas digitais são representadas pelos blocos
DI nomeados de I0.1 até I0.6 e as saídas digitais são representadas pelos blocos DO
nomeados de Q0.1 até Q0.4. O borne de controle do inversor de frequência contém as
entradas nomeadas I1 até I5. O circuito ainda apresenta o “botão inspeção” e os sensores
magnéticos: “fundo do poço”, “1º pavimento” e “porta fechada”. O CLP desse circuito
apresenta uma entrada (“PFT”) proveniente da saída do CLP do circuito principal e duas
saídas (“CFP” e “FCE”) que se ligam às entradas do CLP do circuito de porta. Além
disso, apresenta um “botão emergência” e dois sensores fim de curso (“limite superior” e
“limite inferior”) que se repetem em todos os três circuitos.
Figura 69 - Circuito de inspeção.
As receptividades das transições presentes nos GRAFCETs parciais da Figura 69 são
proposições lógicas dos eventos presentes no circuito de inspeção que nomeiam as
entradas digitais “DI” do circuito de inspeção. Os nomes dados às saídas digitais “DO”
representam as designações das ações, também, presentes nos mesmos GRAFCETs. A
Tabela 16 apresenta a associação tanto das variáveis de entrada aos eventos de entrada,
quanto das variáveis de saída às ações contínuas de saída.
Tabela 16 - Variáveis de entrada e saída do circuito de inspeção.
Entradas digitais do CLP
(Variáveis de entrada) Eventos de entrada
TAG no software Zelio
soft 2
I0.1 (ou I1) Botão emergência Emerg
I0.2 (ou I2) Botão inspeção botao inspec
I0.3 (ou I3) Porta Fechada e Trincada PFT

81
I0.4 (ou I4) Sensor fundo do poço sensor fundo poco
I0.5 (ou I5) Sensor 1° pavimento sensor 1o pav
I0.6 (ou I6) Sensor porta fechada Sensor porta fechada
Saídas digitais do CLP
(Variáveis de saída) Ações contínuas de saída
TAG no software Zelio
soft 2
Q0.1 (ou Q1) Comando fechar porta CFP
Q0.2 (ou Q2) Velocidade de inspeção e
sentido desce vel insp e sentido desce
Q0.3 (ou Q3) Velocidade baixa e sentido
sobe vel baixa e sentido sobe
Q0.4 (ou Q4) Final circuito de inspeção FCI
Após apresentação do circuito de inspeção e das variáveis de entrada e saída, será
explicada a construção dos dois GRAFCETs parciais G1 e G4. Considere inicialmente o
GRAFCET parcial G1, Figura 70. Esse GRAFCET parcial foi criado pensando não
somente na inicialização do sistema de automação da maquete, mas também em um
eventual defeito que cause uma emergência e obrigue o sistema a parar. Por exemplo,
assim que um elevador é instalado em um prédio e seu sistema de automação é ligado, o
sistema tem de detectar onde a cabina se encontra antes que qualquer passageiro possa
usar esse elevador. Além disso, caso um defeito ocorra, por exemplo, uma queda de
energia que desligue o sistema, isso levaria à perda de posição da cabina pelo sistema,
sendo necessário detectar sua posição novamente. Para detectar a posição da cabina foi
criado o processo de inspeção com uso da linguagem GRAFCET que resultou no
GRAFCET parcial G1.
Figura 70 - GRAFCET parcial G1.

82
Assim que o sistema da maquete é ligado, esse não sabe onde a cabina se encontra.
Então, onde quer que a cabina se encontre, o sistema, inicialmente, deve posicioná-la no
primeiro andar. Para isso, o “botão inspeção” deve ser pressionado para que o sistema
desça a cabina, com velocidade de inspeção, até o “sensor fundo do poço”. Esse sensor
se encontra justamente no fundo do poço, abaixo do primeiro andar. Assim que a cabina
chegar nesse sensor, ela deve frear, parar e subir, com velocidade baixa, até o “sensor 1º
pavimento”. Por fim, quando a cabina chegar nesse sensor, o sistema irá freá-la,
estacionando-a no primeiro andar. Ao término da inspeção, a cabina estará no primeiro
andar e o sistema de elevação da maquete entrará em funcionamento normal, ou seja, apto
a transportar cargas como se fosse um elevador transportando passageiros.
Levando em consideração os fundamentos teóricos sobre GRAFCET apresentados no
capítulo 2, será detalhado o GRAFCET parcial G1.
A etapa inicial do GRAFCET parcial G1 é a etapa X31 que aguarda a transposição de
duas transições para evoluir o GRAFCET. O sistema está parado esperando que o “botão
inspeção” seja pressionado para realizar a inspeção. As duas transições, t2 e t7, transpõem
quando o “botão de inspeção” é pressionado, com uma pequena diferença entre as duas.
A transição t2 é transposta quando o “botão inspeção” é pressionado e o “sensor porta
fechada” está negado, ou seja, está com nível lógico falso; já a transição t7 é transposta
quando o “botão de inspeção” é pressionado e o “sensor porta fechada” está com nível
lógico verdadeiro. Com a transposição de t7, não há necessidade do sistema mandar o
comando de fechar porta, pois essa já está fechada, evoluindo direto para a ativação da
etapa X3. Já a transposição da transição t2 ocorre se a porta não estiver fechada e o “botão
inspeção” for pressionado, ativando a etapa X2, que tem uma ação contínua associada
chamada “CFP” (comando fechar porta). Nesse momento, essa ação é enviada para outro
GRAFCET parcial, G2, e é usada como variável de entrada, X2. G2 se encarrega de fechar
a porta e enviar uma ação de saída de volta a G1. Essa ação, “PFT” (porta fechada e
trincada), é usada como variável de entrada em G1 e receptividade da transição t3.
Quando t3 é transposta, a etapa X3 é ativada, realizando suas ações contínuas associadas:
“sentido desce” e “velocidade inspeção”. Ou seja, até então, o sistema que estava parado,
está fechando a porta da cabina, ou detectando se esta já estava fechada, para poder mover
a cabina e realizar a inspeção.
As ações de X3 são enviadas aos bornes do inversor de frequência que aciona o motor
de indução para descer a cabina em velocidade de inspeção. Quando a cabina acionar o
“sensor fundo do poço”, a transição t4 é transposta, desativando X3 e ativando a etapa
X4. A etapa X4 tem duas ações contínuas associadas: “sentido sobe” e “velocidade
baixa”. Essas ações são enviadas ao inversor de frequência, fazendo a cabina frear seu
movimento de descida com velocidade de inspeção e iniciar seu movimento de subida
com velocidade baixa.
Assim que o “sensor 1º pavimento” for acionado, a transição t5 é transposta, ativando
a etapa X5. Essa etapa tem uma ação contínua de saída “FCI” (final circuito de inspeção)
que é enviada ao GRAFCET parcial G3, como variável de entrada X5. Decorrido 0,3 s

83
após a ativação da etapa X5, ela é desativada com a transposição da transição temporizada
t6.
Considere, agora, o GRAFCET parcial G4 apresentado na Figura 71. Esse GRAFCET
unido aos GRAFCETs parciais G5 e G6 param totalmente o sistema da maquete, freando
eletricamente o motor, freando mecanicamente a cabina e levando G1 à sua situação
inicial.
Figura 71 - GRAFCET parcial G4.
Como esses GRAFCETs parciais foram criados para parar o movimento da cabina
imediatamente, também foram usados para simular uma emergência em um elevador real.
Em uma emergência real, um contator abriria a alimentação do motor e o freio
eletromecânico atuaria, freando a cabina. No caso da maquete, não há contator para abrir
a alimentação do motor. Porém, o inversor de frequência envia tanto um comando STOP
ao motor, obrigando-o a frear eletricamente em 0,1 s (segundo rampa de desaceleração),
quanto um comando para o freio eletromecânico, fazendo-o atuar e freando a cabina.
A transição t1 é transposta quando uma emergência é detectada, ou o “botão
emergência” é pressionado, ou tanto o limite superior, quanto o limite inferior forem
acionados. A receptividade de t1 é a conjunção da negação da etapa X31 com a
“emergência” somente para evitar que, por exemplo, pressionem o “botão de emergência”
enquanto o sistema estiver em situação inicial, pois o sistema já está parado. Com a
transposição de t1, a etapa X1 é ativada realizando sua ordem de forçamento, G1INIT.
Sua ordem leva G1 a sua situação inicial, ou seja, desativa todas as etapas e só ativa a
etapa X31. Quando a “emergência” deixar de ser detectada, a transição t42 é transposta e
a ordem de forçamento para de ser executada.
4.2. Circuito de porta
O circuito de porta, representado pelos GRAFCETs parciais G2 e G5, é apresentado
na Figura 72 e para controlar essa parte do circuito foi usado o outro CLP de modelo
SR2D101BD que apresenta seis entradas e quatro saídas digitais.

84
Figura 72 - Circuito de porta.
As receptividades de transições presentes nos GRAFCETs parciais G2 e G5 são
proposições lógicas dos eventos que nomeiam as entradas do CLP do circuito da
Figura 72. As designações de saída de G2 e G5 são as ações que nomeiam as saídas
digitais do circuito de porta. As entradas e saídas digitais do CLP do circuito de inspeção
são apresentadas na Tabela 17.
Tabela 17 - Variáveis de entrada e saída do circuito de porta.
Entradas digitais do CLP
(Variáveis de entrada) Eventos de entrada
TAG no software Zelio
soft 2
I0.1 (ou I1) Comando fechar porta CFP
I0.2 (ou I2) Sensor porta fechada sensor porta fechada
I0.3 (ou I3) Botão abre porta botao abre porta
I0.4 (ou I4) Sensor porta aberta sensor porta aberta
I0.5 (ou I5) Chamada atendida chamada atendida
I0.6 (ou I6) Botão emergência Emerg
Saídas digitais do CLP
(Variáveis de saída) Ações contínuas de saída
TAG no software Zelio
soft 2
Q0.1 (ou Q1) Fechar porta fechar porta
Q0.2 (ou Q2) Abrir porta abrir porta
Q0.3 (ou Q3) Porta Fechada e Trincada PFT
Q0.4 (ou Q4) Porta aberta porta aberta
Após apresentação do circuito de porta e das variáveis de entradas e saídas, será
explicada a construção dos dois GRAFCETs parciais G2 e G5. Considere, inicialmente o
GRAFCET parcial G2, conforme a Figura 73. Esse GRAFCET parcial foi criado para
operar a porta da cabina da maquete. Lembrando que a maquete não tem portas de

85
pavimentos da mesma forma que em elevadores reais. O funcionamento da porta simula
o funcionamento de uma porta de elevador real, ou seja, abre somente quando a cabina
estiver alinhada a um pavimento, e fecha quando o elevador, estacionado em algum
pavimento, recebe um comando de chamada para ser atendida. Enquanto a porta estiver
fechando, ao pressionarem o “botão abrir portas”, ela abre novamente. Além disso, para
simular um defeito ou uma falha de segurança, (por exemplo, abertura de porta durante o
movimento da cabina), foi criado um ramo no GRAFCET parcial G2. Ao pressionar o
“botão abrir porta” durante o movimento da cabina, a porta da cabina se abre, a cabina
freia tanto eletricamente, com o inversor de frequência (rampa de desaceleração de 0,1
s), quanto mecanicamente com o freio eletromecânico, além de preservar a informação
de referência de velocidade e o sentido de giro que o inversor de frequência enviava ao
motor. Para simular o defeito, o botão abrir porta deve ser mantido pressionado e ao retirar
o dedo do botão, o sistema fecha a porta e volta a movimentar a cabina com a velocidade
e sentido que tinha anteriormente.
Figura 73 - GRAFCET parcial G2.
A partir dos fundamentos teóricos sobre GRAFCET apresentados no capítulo 2, será
detalhado o GRAFCET parcial G2.
A etapa inicial do GRAFCET parcial G2 é etapa X30, nesse momento o sistema da
maquete está parado, esperando realizar a inspeção. Quando a etapa X30 é ativada, o
GRAFCET se divide em dois ramos, aguardando a transposição da transição t8 ou da t11.

86
A transição t8 é transposta com o “sensor porta fechada” negado e com o sinal de “CFP”
proveniente da ativação da etapa X2 do GRAFCET parcial G1. Já a transição t11 é
transposta com uma seguinte proposição lógica: “sensor porta fechada” e negação da
“emergência” e 0,5 s transcorridos após a ativação da etapa X30. Ou seja, caso a porta já
esteja fechada e “emergência” esteja em nível lógico zero, t11 é transposta 0,5 s após a
ativação da etapa X30, ativando diretamente a etapa X8, evitando ter de ativar a etapa
X7. Mas se a porta estiver aberta, ao receber o comando “CFP” (comando fechar porta),
a transição t8 é transposta, ativando a etapa X7. A etapa X7 tem uma ação contínua
associada “fechar a porta” que fecha a porta da cabina. Até aqui o sistema está fechando
a porta da cabina ou detectando se a porta está fechada para realizar a inspeção, já que a
cabina só pode se mover de porta fechada.
Com a ativação da etapa X7, a porta da cabina está se fechando e o GRAFCET G2 se
divide em dois ramos, podendo evoluir pelo ramo da transição t10 ou pelo ramo da
transição t14. Com a porta se fechando, transição t10 é transposta quando o “sensor porta
fechada” for ativado, ativando a etapa X8 que tem uma ação contínua associada “PFT”
(porta fechada e trincada). Já a transição t14 é transposta quando o “botão abrir porta” for
pressionado, ativando a etapa X9 que tem uma ação associada “abrir porta” que abre a
porta da cabina. Até aqui, o circuito ou está fechando totalmente a porta, ou reabrindo a
porta da maquete que estava fechando, simulando a reabertura de porta da cabina de um
elevador real. Um elevador real, antes de realizar o fechamento total da porta de cabina,
pode reabrir a porta caso alguém pressione o botão abrir porta ou mesmo interrompa a
barreira de infravermelho.
Com a ativação da etapa X8, a porta da cabina está fechada e a ação “PFT” foi enviada
aos GRAFCETs parciais G1 e G3. Após a etapa X8 o GRAFCET parcial G2 se divide,
podendo seguir pelo ramo da transição t12 ou pelo ramo da transição t15. O ramo de t12
acontece com a cabina estacionada em algum pavimento, já o ramo de t15 acontece com
a cabina em movimento. Com a cabina estacionada e de porta fechada, o sistema aguarda
o comando de “chamada atendida” para abrir a porta. Ou seja, tanto depois da inspeção,
quanto durante o funcionamento normal do sistema, quando a cabina se alinha e estaciona
em um andar, o circuito de porta recebe um comando de “chamada atendida”, indicando
que a cabina chegou no seu andar escolhido e a transição t12 é transposta. O comando
“chamada atendida” é a ação contínua associada às etapas X20 e X27, do GRAFCET
parcial G3. Já com a cabina em movimento e de porta fechada, o sistema pode detectar o
acionamento do “botão abrir porta”, transpondo a transição t15. Esse ramo da transição
t15 foi criado para simular um defeito que ocorre com as portas de um elevador real. Caso
alguma porta, tanto de cabina, quanto de pavimento se abra durante o movimento da
cabina, o sistema deve frear imediatamente a cabina.
Será detalhado primeiramente a continuação do ramo da transição t12, para em seguida
ser detalhado o ramo da transição t15 que simula um defeito de porta.
Após a transposição da transição t12, a etapa X9 é ativada, realizando a ação contínua
associada a essa etapa, “abrir porta”. A porta da cabina será aberta, e assim que o “sensor
porta aberta” for acionado, a etapa X9 é desativada e ativada a X10. Com isso a ação

87
contínua “porta aberta”, associada a etapa X10, é enviada ao GRAFCET parcial G3.
Nesse momento, a cabina está de porta aberta aguardando alguma chamada ser realizada.
Assim que uma chamada for realizada, será enviado ao GRAFCET parcial G2 a variável
de entrada “CFP”. Essa variável de entrada é ação contínua associada às etapas X15 e
X16 do GRAFCET parcial G3. Logo, a transição temporizada t9 é transposta após 3 s da
ativação de uma das duas etapas, X15 ou X16. Com a transposição de t9, o GRAFCET
volta a ativar a etapa X7, realizando sua ação associada “fechar porta”. Ou seja, a porta
vai fechar 3 s após uma chamada ser realizada.
Considere, agora, o ramo em vermelho apresentado na Figura 74 que simula um
defeito na porta. Com relação a esse ramo em destaque, a transposição da transição t15
ocorre quando o “botão abrir porta” é pressionado enquanto a cabina estiver em
movimento. Com a transposição de t15, a etapa X8 é desativada, deixando de executar a
ação contínua “PFT” e ativando a etapa X11 que tem a ação “abrir porta”. A ação contínua
“PFT” é usada como evento de entrada do GRAFCET parcial G3 e quando ela deixa de
ser executada, G3 cessa o movimento da cabina. Nesse momento, a cabina que estava se
movendo, assim que a porta abre, cessa seu movimento, freando eletricamente através do
inversor de frequência (rampa de desaceleração de 0,1 s) e freando mecanicamente com
o freio eletromecânico. A cabina permanece freada enquanto o “botão abrir porta” for
mantido pressionado.
Figura 74 - Parte do GRAFCET parcial G2 que simula defeito de porta.

88
Assim que um defeito de porta ocorre, o sistema de um elevador real cessa seu
movimento imediatamente, só voltando a se mover quando o defeito é resolvido. Para a
maquete voltar a se mover, simulando que o defeito tenha sido resolvido, é necessário
liberar o “botão abrir porta”. Nesse momento, a cabina está parada e a porta ainda está
abrindo e há dois ramos pelos quais G2 pode evoluir, o ramo da transição t16 ou o da t18.
O ramo da t18, assim que o “botão abrir porta” for liberado (ou seja “botão abrir porta”
negado), antes da porta da cabina abrir totalmente, a transição t18 transpõe e ativa a etapa
X13, executando a ação contínua “fechar porta”.
Caso a porta abra totalmente enquanto se mantém pressionado o “botão abrir porta”, é
necessário cessar a ação “abrir porta”, senão o motor permanece forçando a abertura da
porta (situação de rotor bloqueado), podendo queimar o motor. Para contornar isso, assim
que a porta abre totalmente, o “sensor porta aberta” é ativado e a transição t16 é
transposta. Assim que essa transição transpõe, é ativado a etapa X12. Nesse momento, a
porta está aberta e o motor da porta está desligado. Quando o “botão abrir porta” for
liberado (“botão abrir porta” negado), a transição t17 transpõe e a etapa X13 é ativada,
executando sua ação contínua associada “fechar porta”.
Com a etapa X13 ativada, assim que o “sensor porta fechada” for detectado, a transição
t19 é transposta. Quando essa transição é transposta, a etapa X8 é novamente ativada,
executando sua ação “PFT”. Ou seja, a cabina que estava freada devido a uma simulação
de defeito na porta, volta a se mover quando a porta da cabina fecha e a ação “PFT” é
enviada ao GRAFCET parcial G3.
Considere, agora, o GRAFCET parcial G5 apresentado na Figura 75.
Figura 75 - GRAFCET parcial G5.
A função do GRAFCET parcial G5, como já apresentada anteriormente, é
funcionar em conjunto com os GRAFCETs parciais G4 e G6 com a finalidade de parar
totalmente o sistema da maquete, freando eletricamente o motor, freando mecanicamente
a cabina e levando G2 à situação inicial.
A receptividade de t7 é a conjunção da negação da etapa X30 com “emergência”. A
transposição de t7 ocorre quando uma “emergência” é detectada e a etapa X30 não está
ativa, consequentemente a etapa X6 é ativada realizando sua ordem de forçamento,
G2INIT. Sua ordem leva G2 à sua situação inicial, ou seja, desativa todas as etapas e
só ativa a etapa X30. Assim que a “emergência” deixa de ser detectada, a transição t44
transpõe, parando de realizar a ordem de forçamento.

89
4.3. Circuito Principal
O circuito principal apresentado na Figura 76, representado pelos GRAFCETs parciais
G3 e G6 é inserido no CLP de modelo SR2B202BD que apresenta 12 entradas digitais e
8 saídas digitais.
Figura 76 - Circuito principal.
As receptividades das transições presentes em G3 e G6 são os eventos de entrada da
parte do circuito principal da maquete. As designações de saída são as ações contínuas e
armazenadas realizadas na parte do circuito principal. Os eventos de entrada e as saídas
contínuas e armazenadas do circuito principal são apresentadas na Tabela 18.
Tabela 18 - Variáveis de entrada e saída do circuito principal.
Entradas digitais do CLP
(Variáveis de entrada) Eventos de entrada
TAG no software Zelio
soft 2
I1
Botão cabina 1
(botão primeiro andar
cabina)
botao cab 1
I2 Botão pavimento 1
(botão primeiro pavimento) botao pav 1
I3
Botão cabina 2
(botão segundo andar
cabina)
botao cab 2
I4 Botão pavimento 2
(botão segundo pavimento) botao pav 2

90
I5 Porta aberta Porta aberta
I6 Sensor 1° pavimento sensor 1o pav
I7 Sensor 2° pavimento sensor 2o pav
I8 Corte de alta descendo Corte alta desce
I9 Corte de alta subindo Corte alta sobe
I10 Botão emergência Emerg
I11 Final circuito inspeção FCI
I12 Porta fechada e trincada PFT
Saídas digitais do CLP
(Variáveis de saída) Ações contínuas de saída
TAG no software Zelio
soft 2
Q1 Comando fechar porta CFP
Q2 Sentido desce sentido desce
Q3 Velocidade alta descendo velc alta desce
Q4 Velocidade baixa descendo velc baixa desce
Q5 Chamada atendida chamada atendida
Q6 Sentido sobe sentido sobe
Q7 Velocidade alta subindo velc alta sobe
Q8 Velocidade baixa subindo velc baixa sobe

91
Display do CLP
(Variáveis de saída) Ações armazenadas de saída
TAG no software Zelio
soft 2
Display Digital
1º andar
(Mensagem de texto de
aviso de primeiro andar)
TX1 (SET) RX1
(RESET)
Display Digital
2º andar
(Mensagem de texto de
aviso de segundo andar)
TX2 (SET) RX2
(RESET)
Após apresentação do circuito principal e das variáveis de entrada e saída, será
explicada a construção dos dois GRAFCETs parciais G3 e G6. Considere, inicialmente o
GRAFCET parcial G3, Figura 77. Esse GRAFCET parcial foi criado para controlar o
atendimento das chamadas e o movimento da cabina utilizando o inversor de frequência
para operar o motor de tração da maquete.
Figura 77 - GRAFCET parcial G3.

92
O atendimento das chamadas é realizado ao pressionar os botões verdes presentes no
painel de botões da maquete, Figura 54. Quando um desses é pressionado, o sistema
reconhece que uma chamada foi feita, enviando as ações a serem cumpridas, como o
sentido que o inversor de frequência deve girar o motor e a frequência ou velocidade de
giro. Além disso, durante o movimento da cabina, os sensores Corte de alta sobe e Corte
de alta desce, (Tabela 4) são acionados para reduzir a velocidade da cabina e os sensores
de pavimentos são responsáveis por frear e estacionar a cabina no pavimento desejado.
A cabina se move de um andar para o outro de acordo com o formato da curva de
velocidade apresentada na Figura 78. A curva de velocidade da maquete é mais simples
que a curva da Figura 41, pois só foi parametrizado uma rampa de aceleração.
Figura 78 - Curva de velocidade da maquete.
A partir dos fundamentos teóricos sobre GRAFCET, será detalhado o GRAFCET
parcial G3.
Inicialmente o sistema está desligado e assim que é inicializado, o circuito de porta
fecha a porta, ou, caso ela já esteja fechada, o circuito de inspeção vai realizar a inspeção
e posicionar a cabina no primeiro andar. Ao final da inspeção, esse circuito envia um
comando “FCI” (final circuito de inspeção) para o circuito principal. Ou seja, a situação
inicial do GRAFCET parcial G3 consiste somente na etapa X29 ativa. A transição t38
aguarda o evento de entrada “FCI”, ação de saída do GRAFCET parcial G2. Assim que
“FCI” for enviado por G2 e recebido por G3, t38 é transposta. Assim que t38 for
transposta, a etapa X20 é ativada, realizando sua ação contínua “chamada atendida” e a
ação armazenada TX1=1, escrevendo “1° andar” no display do CLP. Assim que a cabina
estacionar no primeiro andar, a ação “chamada atendida” vai ser enviada para o circuito
porta (GRAFCET parcial G2), abrindo a porta da cabina. Assim que a porta terminar de
abrir e acionar o “sensor porta aberta”, a transição t41 vai transpor, desativando a etapa
X20 e ativando a etapa X33. Nesse momento, a inspeção terminou e a cabina já está
posicionada no primeiro andar de porta aberta aguardando uma chamada ser realizada.
Como a cabina está no primeiro andar, a única chamada que pode ser realizada é para o
segundo pavimento.

93
As transições responsáveis pelas chamadas são as transições t20, t21, t29, t30 e suas
receptividades estão indicadas na Tabela 19.
Tabela 19 - Receptividades das transições t20, t21, t29 e t30.
Transição Receptividade
t20 “botão cabina 1" ∙ 𝑋15 ∙ 𝑋20 ∙ 𝑋33
t21 “botão pavimento 1" ∙ 𝑋15 ∙ 𝑋20 ∙ 𝑋33
t29 “botão cabina 2" ∙ 𝑋22 ∙ 𝑋27 ∙ 𝑋32
t30 “botão pavimento 2" ∙ 𝑋22 ∙ 𝑋27 ∙ 𝑋32
Como t20, t21, t27 e t30 são transições fonte, para evitar instabilidade no GRAFCET
G3, foram usadas negações das etapas nas suas receptividades para evitar que cada uma
dessas transições transpusesse com apenas o apertar de um botão.
Com relação às transições t20 e t21, quando uma das etapas, X20 ou X33, estiver
ativada, isso significa que a cabina está no primeiro pavimento. Justamente por isso essas
etapas estão negadas, para evitar fazer uma chamada no sentido de descida com a cabina
já no primeiro andar. Se essas etapas negadas não estivessem em suas receptividades,
com a transposição ou de t20, ou de t21, as etapas X14 e X15 seriam ativadas, a cabina
continuaria estacionada no primeiro andar, e essa chamada no sentido de descida
permaneceria memorizada sem necessidade. Quando, eventualmente, uma chamada no
sentido de subida fosse atendida, logo em seguida a cabina ia atender a chamada
memorizada no sentido de descida.
Da mesma forma, com as transições t29 e t30, quando uma das etapas, X27 ou X32,
estiver ativada, isso significa que a cabina está no segundo pavimento. Justamente por
isso essas etapas estão negadas, para evitar fazer uma chamada no sentido de subida com
a cabina já no segundo andar. Se essas etapas negadas não estivessem em suas
receptividades, com a transposição ou de t29, ou de t30, as etapas X21 e X22 seriam
ativadas, a cabina continuaria estacionada no segundo andar, e essa chamada no sentido
de subida ficaria memorizada sem necessidade. Quando, eventualmente, uma chamada
no sentido de descida fosse atendida, logo em seguida a cabina ia atender a chamada
memorizada no sentido de subida.
A negação das etapas X15 e X22 também são usadas para evitar fazer uma segunda
chamada no mesmo sentido que já esteja sendo realizada no momento. Isso evita
memorizar uma chamada desnecessariamente.
Dando prosseguimento à evolução do GRAFCET parcial G3, o circuito principal está
aguardando uma chamada para o segundo andar, ou seja, ou o “botão cabina 2” ou o
“botão pavimento 2” podem ser pressionados nesse momento. Caso o “botão cabina 2”
seja pressionado, t29 transpõe, caso o “botão pavimento 2” seja pressionado, t30 transpõe.
Qualquer uma dessas transições, ao transpor, ativa as etapas X21 e X22. A etapa X21
sendo ativada, sua ação contínua “CFP” é realizada caso a condição de designação seja
respeitada, X33 ativa. Como a etapa X33 está ativa, esperando a transposição da transição
t31 para ser desativada, a condição de designação é verdadeira, logo a ação “CFP” é

94
realizada. A ação, “CFP”, é enviada ao GRAFCET parcial G2 e o circuito de porta vai
fechar a porta. Assim que a porta fechar, a ação “PFT” é enviada para o GRAFCET parcial
G3.
Como a receptividade da transição t31 é 𝑃𝐹𝑇 ∙ 𝑋15 , a transição t31 pode então
transpor, já que “PFT” é verdadeiro, restando saber se a etapa X15 está inativa. A negação
da etapa X15 ou sua inatividade significa que não há nenhuma chamada no sentido de
descida sendo realizada. Se uma chamada em um sentido estiver sendo realizada, esta
deve ser atendida primeiro para a próxima chamada no outro sentido ser realizada.
Assim que t31 for transposta, as etapas X21 e X33 são desativadas e a etapa X23
ativada. Com a transposição de t31, sua ação armazenada é realizada, fazendo RX1=1,
retirando o texto “1º andar” do display do CLP. E ao ativar a etapa X23, as ações contínuas
associadas, “sentido sobe” e “velocidade alta sobe”, são realizadas. Nesse momento, o
CLP envia dois comandos para o inversor de frequência que faz o motor subir a cabina
em velocidade alta, de acordo com a rampa de aceleração mostrada na curva de
velocidade da Figura 78. Lembrando, conforme capítulo 3, que o freio eletromecânico se
abre assim que a frequência enviada ao motor pelo inversor for maior que 4,5 Hz.
Quando a cabina passar pelo sensor “corte de alta sobe”, a transição t34 é transposta e
consequentemente são realizadas as ações contínuas “sentido sobe” e “velocidade baixa
sobe”. Ou seja, a cabina continua sendo erguida pelo motor, mas agora sua velocidade irá
reduzir, passando da velocidade alta, para a velocidade baixa. A cabina continua seu
movimento de subida até encontrar com o “sensor 2º pavimento”. Assim que o sensor for
ativado, a transição t37 transpõe, desativando as etapas X22 e X25 e ativando a etapa
X27. Ao desativar a etapa X25, as duas ações, “sentido sobe” e “velocidade baixa sobe”
são cessadas e o motor reduz a velocidade da cabina a zero. Então o inversor pré-
programado freia a cabina eletricamente (frenagem CC) e em seguida o freio
eletromecânico é desenergizado, o que faz ele atuar, estacionando a cabina no segundo
pavimento.
Com a cabina no segundo pavimento, a etapa X27 está ativa, logo suas duas ações
associadas são realizadas. A ação contínua, “chamada atendida” e a ação memorizada “2º
andar”. A ação contínua, “chamada atendida”, é enviada ao circuito de porta, e usada
como receptividade de t12 no GRAFCET parcial G2. Assim que t12 for transposta, X9 é
ativada, executando a ação abrir porta. Já a ação memorizada que atua na ativação faz o
texto “2º andar” aparecer no display do CLP (TX1=1). Assim que a porta abrir totalmente,
o “sensor porta aberta” é ativado, transpondo a transição t40, que ativa a etapa X32.
O elevador se encontra estacionado no segundo andar de porta aberta e pode receber
uma chamada para o primeiro pavimento assim que um dos botões, “botão cabina 1” ou
“botão pavimento 1”, for pressionado. Se o “botão cabina 1” for pressionado, t20
transpõe, mas caso o “botão pavimento 1” seja pressionado, t21 transpõe. Qualquer uma
dessas duas transições quando for transposta, vai ativar as etapas X14 e X15. Quando a
etapa X14 é ativada, sua ação associada, “CFP”, pode ser realizada. Essa é uma ação
contínua que tem uma condição de designação: a etapa X32 deve estar ativa. Como a
etapa X32 está ativa, a ação contínua “CFP” pode ser realizada. Essa ação então é enviada

95
como evento de entrada ao GRAFCET parcial G2 que comanda o fechamento da porta e
assim que a porta se fecha totalmente, a ação de G2, “PFT”, é enviada ao GRAFCET
parcial G3.
Com as etapas X14 e X32 ativas e G3 ao receber o evento de entrada “PFT”, a transição
t22 pode ser transposta, caso a etapa X22 esteja inativa, ou seja, não haja uma chamada
no sentido de subida ocorrendo nesse momento. Se não houver uma chamada de subida
sendo realizada, t22 transpõe, ativando a etapa X16 e desativando as etapas X14 e X32.
Com a transposição de t22, sua ação armazenada é realizada, já que é uma ação que atua
em sua transposição. Ou seja, a ação faz RX2=1 e com isso o texto “2º andar” é apagado
do display.
Nesse momento, com a etapa X16 ativa, as ações, “sentido desce” e “velocidade alta
desce”, são realizadas e enviadas ao inversor de frequência, que coloca o motor para girar
no sentido de descer a cabina com velocidade alta, respeitando sua curva de velocidade,
que inicialmente tem uma rampa de aceleração de 2 s. Assim que o inversor de frequência
enviar uma frequência superior a 4,5 Hz, o freio eletromecânico se abre, liberando a
cabina para se mover. Nesse momento, a cabina está se movendo no sentido de descida e
assim que o “sensor corte de alta desce” é acionado, a cabina vai reduzir sua velocidade
de alta para baixa, novamente, seguindo sua curva de velocidade. Isso acontece já que a
transição t25 transpõe quando o “sensor corte de alta desce” é acionado, ativando a etapa
X18 e desativando a etapa X16. A etapa X18 tem duas ações contínuas associadas,
“sentido desce” e “velocidade baixa desce”.
O elevador está se movendo em velocidade baixa no sentido de descida e assim que
passa no “sensor 1º pavimento”, a transição t28 transpõe, desativando as etapas X15 e
X18 e ativando X20. Assim que a etapa X20 é ativada, as duas ações associadas são
executadas. Uma delas é a ação contínua “chamada atendida” e a outra é uma ação
armazenada TX1=1, que faz aparecer o texto “1º andar” no display do CLP.
A ação “chamada atendida” é enviada ao circuito de porta e é usado como evento de
entrada de G2. O circuito de porta vai abrir a porta e assim que essa estiver totalmente
aberta, o “sensor porta aberta” vai ser acionado.
Quando o “sensor porta aberta” for acionado, a transição t41 vai transpor, ativando a
etapa X33. Associada a essa etapa, tem uma ação armazenada que é realizada em sua
desativação. Sua desativação ocorre com a realização de uma chamada para o segundo
andar. A evolução de G3 se repete, realizando chamadas ora para o primeiro andar e ora
para o segundo andar.
Considere agora os quatro ramos em destaque na Figura 79. Os quatros ramos em
questão são usados para simular, em conjunto com o circuito de porta, um defeito na porta
enquanto a cabina está se movendo. Quando uma das etapas, X16, X18, X23 ou X25,
estiver ativa, isso significa que a cabina está em movimento, com velocidade alta ou
baixa, para cima ou para baixo. Quando o “botão abrir porta” for pressionado para simular
um defeito na porta, o GRAFCET parcial G2 vai desativar a etapa X8 que tem a ação
associada “PFT”, e como essa ação é contínua, ela vai deixar de ser realizada. Para G2,
“PFT” é uma ação, uma variável de saída, mas para G3, “PFT” é evento de entrada e está

96
presente nas receptividades de todas as transições dos quatro ramos destacados da Figura
79. Os quatro ramos têm a mesma lógica de funcionamento, então será escolhido um
dentre os quatro para ser detalhado, dessa forma os outros três já estarão detalhados.
Figura 79 - Parte do GRAFCET parcial G3 que simula defeito de porta.
Quando a etapa X23 estiver ativa, a cabina se encontra em movimento no sentido de
subida com velocidade alta. Quando o “botão abrir porta” for pressionado, a ação de G2,
“PFT”, vai deixar de ser realizada e o GRAFCET parcial G3 interpreta esse evento como
“PFT” negado. Como a receptividade da transição t32 é “PFT” negado, t32 é transposta
nesse momento, desativando a etapa X23, deixando de realizar suas ações contínuas,
“sentido sobe” e “velocidade alta sobe”. Ou seja, a cabina estava subindo e assim que o
botão abrir porta for pressionado, a porta abre e a cabina cessa seu movimento, freando
eletricamente e ativando o freio eletromecânico. Isso simula um defeito real, caso a porta
da cabina se abra durante o movimento do elevador, o sistema deve freá-lo
imediatamente.

97
Assim que o “botão abrir porta” for liberado, G2 vai fechar a porta e quando ela
estiver totalmente fechada, G2 vai enviar “PFT” para G3. A receptividade da transição
t33 fica verdadeira, então t33 é transposta, ativando novamente a etapa X23 e com isso
realizando as ações “sentido sobe” e “velocidade alta sobe”. Ou seja, assim que o “botão
abrir porta” for liberado, o sistema devolve sentido e velocidade ao inversor de frequência
que retoma o movimento da cabina.
Todos os outros três ramos em vermelho tem o mesmo funcionamento,
diferenciando apenas o sentido e velocidade da cabina no momento da simulação do
defeito de porta.
Considere agora o GRAFCET parcial G6 apresentado na Figura 80.
Figura 80 - GRAFCET parcial G6.
A função do GRAFCET parcial G6 é parar totalmente o sistema da maquete, freando
eletricamente o motor, freando mecanicamente a cabina e reiniciando o diagrama ladder
para sua situação inicial.
A receptividade de t39 é a conjunção da negação da etapa X29 com uma “emergência”.
A transposição de t39 ocorre quando uma “emergência” é detectada e a etapa X29 não
está ativa, consequentemente a etapa X28 é ativada realizando sua ordem de forçamento,
G3INIT. Sua ordem leva G3 a sua situação inicial, ou seja, desativa todas as etapas e
só ativa a etapa X29. Assim que a “emergência” deixar de ser detectada, a transição t43
transpõe, deixando de realizar a ordem de forçamento.
4.4. Conversão de GRAFCET para Diagrama Ladder
O método de conversão de GRAFCET para diagrama ladder é baseado no método
Moreira e Basílio (2013). Os três pares de GRAFCETs parciais (G1-G4, G2-G5, G3-G6),
que representam os circuitos de inspeção, de porta e o principal, foram convertidos em
três diagramas ladders. Cada ladder foi inserido em um CLP e cada CLP será responsável
por um circuito.
Foram criados cinco módulos: módulo da inicialização, módulo dos eventos externos,
módulo das condições, módulo dinâmica, módulo das ações. Porém, não foi possível o
uso direto desse método para fazer o diagrama ladder da maquete. No método Moreira e
Basílio (2013) podem existir inúmeras bobinas SET e RESET da mesma variável no
diagrama ladder, porém os CLPs usados para automação da maquete não permitem

98
repetir bobinas da mesma variável, estando disponível quatro tipos de bobinas diferentes,
bobina normal, impulsional, SET e RESET, e só podendo usar um tipo de bobina de uma
variável no diagrama ladder.
Escolhendo como variável, ou memória interna, M1 como exemplo, é possível
perceber, na Figura 81, os quatro tipos de bobinas de M1 que estão em uso no ladder no
retângulo em vermelho e a SETa em vermelho aponta que as quatro bobinas já foram
usadas, não podendo ser usadas novamente.
Figura 81 – As bobinas não podem ser repetidas.
Ou seja, é preciso criar outro método de conversão para que esses CLPs possam ser
usados, evitando repetição de bobinas.
O método de conversão será explicado, porém, somente convertendo os GRAFCETs
parciais G1 e G4, do circuito de inspeção, para diagrama ladder. Ou seja, como o método
de conversão já vai ser apresentado para o circuito de inspeção, para os circuitos restantes,
circuito de porta e circuito principal, só serão apresentados os diagramas ladder,
eventualmente explicando alguma característica mais particular.
4.4.1. Módulo da Inicialização
Nesse módulo há a ativação das etapas presentes na situação inicial. A situação inicial
para os dois GRAFCETs parciais da Figura 66 consiste somente na etapa X31 ativa.
O método para ativação dessa etapa inicial foi feito com as linhas indicadas com SETas
em vermelho do diagrama ladder da Figura 82.

99
Figura 82 - Módulo da inicialização do circuito de inspeção.
O contato normalmente fechado da memória n6 energiza a bobina do
temporizador TT2 (Function A), e, após 0,1 segundos, seu contato T2 fecha, energizando
a bobina SET de n6 (SN6). Assim que SN6 for energizada, o contato de n6 abre e
permanece aberto, RESETando o temporizador T2. Assim que o contato T2 fecha, ele
também energiza a bobina impulsional da memória MN, representando a ativação da
etapa X31.
O módulo da inicialização dos outros GRAFCETs parciais também é feito da
mesma forma, o contato do temporizador deve ser conectado a todas as bobinas
impulsionais associadas às etapas da situação inicial, realizando a ativação dessas etapas.
Logo, o módulo da inicialização dos GRAFCETs parciais dos circuitos de porta e
principal estão presentes na Figura 83 e Figura 84, indicados com a SETa vermelha.
Figura 83 - Módulo da inicialização do circuito de porta.

100
Figura 84 - Módulo da inicialização do circuito principal.
4.4.2. Módulo dos Eventos Externos
Nesse módulo há a associação das variáveis de entrada com as memórias internas,
chamadas de discrete inputs no programa Zelio soft 2.
O módulo de eventos externos do circuito de inspeção ficou de acordo com a Figura
85.
Figura 85 - Módulo dos eventos externos do circuito de inspeção.
Os seis contatos normalmente abertos, I1 até I6, são as memórias chamadas
discrete inputs, que recebem o valor lógico das entradas digitais onde são ligados os
sensores e botões da maquete.
Na entrada digital I1 estão conectados três sensores em paralelo, o botão
emergência, o sensor limite superior e o sensor limite inferior. Os três são responsáveis
por detectar uma emergência. Quando uma emergência for detectada, o contato de I1
fecha, energizando a bobina MC nomeada emerg.
Na entrada I2 está conectado o botão inspeção. Assim que o botão inspeção for
pressionado, o contato de I1 fecha, energizando a bobina MD nomeada botão inspec.
Na entrada digital I3 está conectada a saída digital Q3 do circuito de porta. A saída Q3
do circuito de porta representa a ação “PFT” e quando essa ação é realizada, a saída Q3

101
fecha e energiza a entrada digital I3 do circuito de inspeção. Com isso, o contato
normalmente aberto de I3 fecha e energiza a bobina ME nomeada PFT.
Na entrada digital I4 está conectado o sensor fundo do poço. Assim que esse sensor é
acionado, o contato normalmente aberto de I4 fecha, energizando a bobina MF nomeada
sensor fundo do poço.
Na entrada digital I5 está conectado o sensor 1º pavimento e assim que esse sensor é
acionado, o contato normalmente aberto de I5 fecha, energizando a bobina MG nomeada
sensor 1º pav.
Na entrada digital I6 está conectado o sensor porta fechada. Assim que esse sensor é
acionado, o contato normalmente aberto de I6 fecha, energizando a bobina ML nomeada
sensor porta fechada.
Da mesma forma foram construídos os módulos dos eventos externos dos circuitos de
porta e principal, mostrados na Figura 86 e Figura 87.
Figura 86 - Módulo dos eventos externos do circuito de porta.
Figura 87 - Módulo dos eventos externos do circuito principal.

102
4.4.3. Módulo das Condições
Esse módulo é responsável pelas condições de transposição de transições dos
GRAFCETs parciais G1 e G4.
De acordo com a regra de transposição de transição, para uma transição ser transposta
é necessário que a transição esteja habilitada e sua receptividade de transição seja
verdadeira (True). Essas duas regras foram usadas nesse módulo das condições, ou seja,
as transições são associadas a bobinas e suas transposições ocorrem quando a bobina é
energizada. A “transição estar habilitada” foi representada colocando os contatos que
representem as etapas anteriores a essa transição como condição de energização da sua
bobina. E a “receptividade de transição ser verdadeira” é representada com uma
combinação lógica dos contatos (normalmente abertos ou fechados) relativos às entradas
digitais que compõem as receptividades das transições.
É possível ver as duas regras de transposição de transição serem convertidas em
diagrama ladder na Figura 88. Por exemplo, a transição t2 para estar habilitada necessita
que a etapa X31 esteja ativa e sua receptividade (𝑏𝑜𝑡ã𝑜 𝑖𝑛𝑠𝑝𝑒çã𝑜 ∙
𝑠𝑒𝑛𝑠𝑜𝑟 𝑝𝑜𝑟𝑡𝑎 𝑓𝑒𝑐ℎ𝑎𝑑𝑎 ) seja verdadeira. Ou seja, na linha 012, presente no diagrama da
Figura 88, a bobina M2 representa a transição t2, o contato normalmente aberto MN
representa a etapa anterior X31 necessária para que a transição esteja habilitada e o
contato normalmente aberto MD em série com o contato normalmente fechado mL,
ambos representam a receptividade de t2. A condição para transposição de t2 são três
variáveis representadas por contatos, todos em série. Quando o valor lógico da operação
dos três contatos for verdadeiro, a bobina que representa t2 se energiza, representando
sua transposição.
Figura 88 - Módulo das condições do circuito de inspeção.

103
A partir de uma rápida comparação entre a Figura 66 com esse módulo das condições,
é possível verificar cada transição e sua condição de transposição.
O módulo das condições dos circuitos de porta e principal são apresentados
abaixo, respectivamente, na Figura 89 e Figura 90.
No módulo do circuito de porta existem três transições, t14, t15 e t17 que apresentam
mais uma condição para transposição, além das duas mencionadas anteriormente:
transição estar habilitada e sua receptividade ser verdadeira. Basicamente é preciso evitar
que a receptividade de uma transição seja verdadeira antes dessa transição estar
habilitada. Ou melhor, primeiro a transição deve ficar habilitada e em seguida sua
receptividade deve se tornar verdadeira. Isso deve ocorrer devido ao módulo da dinâmica
que foi elaborado.
As etapas são representadas com bobinas impulsionais. Ao receber um sinal de
impulso (borda de subida), a bobina energiza, representando que a etapa está ativa. Ao
receber outro impulso, em outro ciclo de varredura, a bobina desenergiza, representando
que a etapa foi desativada. Esses impulsos representam as transposições das transições.
Logo é necessário que as transições, anteriores e posteriores à uma etapa, transponham
em ciclos de varreduras diferentes, pois dois impulsos no mesmo ciclo de varredura são
interpretados como se fosse somente um, e a etapa não será ativada e em seguida
desativada como deveria ocorrer.
Usando a transição t14, presente na linha 022 da Figura 89, como exemplo para melhor
compreensão dessa nova condição de transposição. A transição t14 é responsável por
perceber se o “botão abre porta” foi pressionado enquanto a cabina estiver estacionada no
pavimento. A receptividade de t14 seria somente o “botão abre porta” e para t14 ficar
habilitada, basta que X7 esteja ativa. Só que duas transições, t8 e t9, ativam X7. Quando
uma delas, ou t8, ou t9, transpor, ativando X7, e a receptividade de t14 já for verdadeira,
ou seja, o “botão abre porta” já estiver sendo pressionado, t14 vai transpor junto com t8
ou t9. A transposição no mesmo ciclo de varredura prejudica a evolução do GRAFCET,
como já explicado anteriormente, pois são dois impulsos enviados ao mesmo tempo para
a bobina impulsional de X7. Dessa forma, X7 permaneceria ativa após a transposição de
t14, o que seria um erro. Por isso é adicionado, na receptividade de t14, os contatos NF
de t8 e t9, ambos em série. Assim que qualquer um dos dois transpor, seu contato NF
abre, evitando a transposição de t14 no mesmo ciclo de varredura. Com essa adição, ao
final da transposição de t14, X7 será desativada.
Da mesma forma, essa condição adicional também está presente nas transições t15 e
t17. Na teoria, todas as transições, posteriores a uma etapa, poderiam ter, como condição
de transposição, os contatos NF das transições anteriores a essa etapa, e isso poderia ser
feito para todas as etapas. Mas nem todas as transições do GRAFCET global tem essa
peculiaridade de transpor junto com alguma outra transição, logo, seria adicionar contatos
de forma desnecessária. Fora que só cabem cinco contatos por linha no diagrama ladder,
ou seja, se necessitar de mais de cinco contatos para fazer a lógica da transposição de uma
transição, começa a exigir tanto criatividade do projetista, quanto a necessidade de mais
bobinas e contatos auxiliares, que são limitados.

104
No CLP SR2B202BD, foram usadas quase todas as bobinas auxiliares no diagrama
ladder do circuito principal, restando apenas duas. Caso necessitasse de mais três bobinas
auxiliares, simplesmente seria impossível elaborar o ladder. Ou seja, foi elaborado da
forma mais “econômica” possível em relação às memórias usadas, mas sem prejudicar na
segurança e confiabilidade.
Figura 89 - Módulo das condições do circuito de porta.

105
Figura 90 - Módulo das condições do circuito principal.
4.4.4. Módulo da Dinâmica
No módulo da dinâmica é feita a atualização das etapas após a transposição das
transições. A atualização ocorre ativando a(s) etapa(s) posterior(es) de uma transição e
desativando a(s) etapa(s) anterior(es).
Como dito anteriormente, como só é possível usar quatro bobinas de tipos diferentes
para cada memória interna, as etapas foram representadas por bobinas impulsionais.

106
Como uma etapa tem suas transições anteriores e suas transições posteriores ligadas a ela,
basta colocar todos os contatos normalmente abertos, que representam as transições,
ligados à bobina impulsional que representa a etapa. Isso pode ser observado no módulo
da dinâmica do circuito de inspeção, Figura 91.
Figura 91 - Módulo da dinâmica do circuito de inspeção.
Assim que uma transição anterior transpuser, seu contato fecha e envia um impulso à
bobina da etapa, ativando essa etapa, e quando uma transição posterior transpuser, seu
contato fecha enviando um outro impulso para mesma bobina, o que a desativa. Por isso
foi dito anteriormente que a transposição das transições anterior e posterior devem ocorrer
em ciclo de varreduras diferentes, para que haja ativação e desativação das etapas.
A seguir, na Figura 92, Figura 93 e Figura 94, são apresentados os módulos da
dinâmica dos circuitos de porta e principal.

107
Figura 92 - Módulo da dinâmica do circuito de porta.

108
Figura 93 - Módulo da dinâmica do circuito principal parte 1/2.

109
Figura 94 - Módulo da dinâmica do circuito principal parte 2/2.
4.4.5. Módulo das Ações
No módulo das ações, as etapas que apresentam ações de saída são representadas por
contatos NA e são ligados às bobinas de saída. Essas bobinas de saída realizam ações na
maquete, tanto ações contínuas, quanto ações armazenadas ou impulsionais. Ações
contínuas são representadas por bobinas simples, ações armazenadas por bobinas SET e
RESET.
Assim que uma dessas etapas é ativada, seu contato NA fecha, energizando a bobina
de saída. Quando uma bobina de saída é energizada, um relé ou transistor de saída fecha
seus contatos de saída, realizando a(s) ação(ões) associada(s) à etapa.
O módulo das ações do circuito de inspeção está presente na Figura 95.

110
Figura 95 - Módulo das ações do circuito de inspeção.
A etapa X2 apresenta uma ação contínua, “CFP”, realizada quando o borne Q1 é
fechado.
A etapa X3 apresenta duas ações contínuas, “velocidade inspeção” e “sentido desce”,
realizadas quando o borne Q2 é fechado.
A etapa X4 apresenta duas ações contínuas, “velocidade baixa” e “sentido sobe”,
realizadas quando o borne Q3 é fechado.
A etapa X5 apresenta uma ação contínua, “FCI”, realizada quando o borne Q4 é
fechado.
Os circuitos de porta e principal também apresentam ações contínuas e a conversão
dos seus GRAFCETs também obedece ao módulo das ações, conforme Figura 96 e Figura
97.
Figura 96 - Módulo das ações do circuito de porta.

111
Figura 97 - Módulo das ações do circuito principal.
Existem duas características diferentes no módulo das ações do circuito de inspeção.
A primeira característica é a presença de condições de designações em ações e a segunda
é a presença de ações armazenadas.
A primeira ocorre nas linhas 122 e 123 da Figura 97. Na linha 122, como a ação
armazenada “CFP” associada à etapa X14 tem uma condição de designação (a etapa X32
ativa), os contatos NA das etapas X14 e X32 estão em série ligados à bobina de Q1,
chamada de “CFP”. Já na linha 123, a condição de designação da mesma ação
armazenada, “CFP”, associada à X21 é a etapa X33 ativa, logo seus contatos NA também
estão em série e ligados à bobina Q1. Ou seja, além do contato NA da etapa que contém
uma ação de saída, é colocado em série o contato da condição de designação.
A segunda ocorre tanto nas linhas 134 e 135 da Figura 97, quanto no módulo das
condições. Dois recortes foram feitos no módulo das ações e no módulo das condições
para uma melhor explicação. Os recortes são exibidos na Figura 98 abaixo e as SETas em
vermelho indicam as bobinas SET e RESET das ações armazenadas.

112
Figura 98 - As duas ações armazenadas sendo "setadas" no módulo das ações e sendo
"resetadas" no módulo das condições.
Há apenas duas ações armazenadas no circuito principal, os blocos de texto “1º andar”
e “2º andar” exibidos no display do CLP SR2B202BD, que precisam de um evento para
“setar” as ações e outro evento para “resetar” as ações. As duas ações armazenadas, “1º
andar” e “2º andar”, são “setadas” na ativação das etapas X20 e X27 e “resetadas” na
transposição das transições t22 e t31, respectivamente, conforme foi mostrado na Figura
98. As duas bobinas SET dos textos são adicionadas, no módulo das ações, juntas com as
bobinas simples das ações contínuas (contato NA de X20 ligado a TX1 e contato NA de
X27 ligado a TX2), e, no módulo das condições, são adicionadas as bobinas RESET dos
textos juntas com as bobinas das transições (bobina RX1 em paralelo com a bobina de
t31 e bobina RX2 em paralelo com a bobina t22), assim as ações serão “resetadas” na
transposição das transições.
Além disso os contatos NA nomeados de “emerg” nas linhas 025 e 035 e os mesmos
contatos “emerg” NF nas linhas 024 e 034 foram usados para, trabalhando juntos, também
resetar as ações armazenadas quando ocorrer uma emergência. A presença dos contatos
NF é para evitar transpor as transições t22 e t31 quando houver uma emergência.
4.4.6. Conversão de Ordem de Forçamento em Diagrama
Ladder
Restou apenas apresentar a conversão das ordens de forçamento das etapas X1, X6 e
X28 em diagrama ladder. Quando essas etapas são ativadas, elas forçam os GRAFCETs
parciais G1, G2 e G3 para suas situações iniciais, ou seja, desativam todas as etapas e só
ativam as etapas iniciais.
Será apresentada a conversão da ordem de forçamento do circuito de inspeção,
lembrando que os circuitos de porta e principal seguem a mesma lógica de conversão.

113
O contato NA da etapa X1, que contém a ordem de forçamento G1INIT, é ligado a
todas as bobinas RESET das etapas do GRAFCET parcial G1, exceto a bobina da etapa
X31. Com isso, quando a etapa X1 for ativada, seu contato NA fecha, energizando as
bobinas RESET de todas as etapas do GRAFCET parcial G1, desativando cada uma delas,
excetuando-se a bobina de X31. E para ativar a etapa inicial X31, é colocado um contato
NA representando a etapa X1 ligado à bobina de X31 no módulo da dinâmica. A Figura
99 abaixo apresenta um recorte do módulo da dinâmica do circuito de inspeção com uma
SETa em vermelho indicando o contato NA da etapa X1 ligado à bobina da etapa inicial
X31, além de mostrar o contato NA da etapa X1 ligado às bobinas RESET das etapas de
G1, exceto X31.
Figura 99 - Conversão da ordem de forçamento G1INIT em diagrama ladder.
Agora será mostrada, na Figura 100 e Figura 101 a conversão das ordens de
forçamento de X6 e X28 dos circuitos de porta e principal respectivamente. As SETas em
vermelho apresentam os contatos NA das etapas X6 e X28 responsáveis por ativarem as
etapas iniciais dos GRAFCETs parciais G2 e G3 e logo abaixo os mesmos contatos que
desativam todas as etapas restantes.

114
Figura 100 - Conversão da ordem de forçamento G2INIT em diagrama ladder.
Figura 101 - Conversão da ordem de forçamento G3INIT em diagrama ladder.

115
5. Validação e discussões
Para validar os três diagramas ladder propostos para controlar a maquete do elevador
foi usado, inicialmente, o modo de simulação do software Zelio soft 2, para em seguida
serem feitos os testes finais na maquete até ela operar corretamente. Nesse modo, é
possível simular os sensores atuando, cada botão sendo pressionado e consequentemente
as ações de saída da maquete.
5.1. Teste no modo simulação do programa Zelio soft 2
Com os três diagramas ladder prontos, foi possível testar seus funcionamentos
seguindo justamente os GRAFCETs parciais. Como a situação inicial é conhecida, é
possível saber como acontecerá a evolução dos GRAFCETs, quais etapas se ativariam de
acordo com o acionamento dos devidos botões e sensores. Ou seja, o modo simulação
permite ao projetista imaginar o funcionamento da planta, identificar erros e falhas
somente com os eventos de entradas, os eventos internos e as ações de saída, sem
necessitar correr riscos e testar diretamente na planta.
Mais uma vez utilizando o circuito de inspeção como exemplo, suponha que o sistema
tenha sido ligado agora e a cabina já esteja de porta fechada. Caso o botão inspeção seja
pressionado, a cabina deve descer com velocidade de inspeção até o sensor fundo do poço
e subir com velocidade baixa até o sensor de primeiro pavimento, onde deve frear.
Ou seja, o caminho a ser seguido deve ser o indicado em vermelho na Figura 102
abaixo.
Figura 102 – Simulação do modo de inspeção começando com a porta da cabina já
fechada.
Para começar a simulação no programa Zelio soft 2, o botão S deve ser pressionado,
para entrar no modo simulação e em seguida deve ser pressionado o botão RUN para

116
começar a simulação. Para parar a simulação o botão STOP deve ser pressionado. Os
três botões são encontrados no canto superior direito do programa, Figura 103.
Figura 103 – Botões para modo simulação do programa Zelio soft 2.
A Figura 103 já se encontra no modo simulação, porém o botão STOP está vermelho,
indicando que a simulação ainda não iniciou. Ou seja, o botão RUN deve ser pressionado
para dar início à simulação, ficando da cor verde.
Para simular o trecho indicado em vermelho na Figura 102, basta que o sensor porta
fechada e o botão inspeção sejam acionados inicialmente, ou seja, na janela discrete input,
as entradas I2 e I6 são selecionados, ficando iluminadas. Quando isso for feito, as ações
da etapa X3, sentido desce e velocidade de inspeção, devem ser executadas, ou seja, na
janela discrete outputs, Q2 deve ficar iluminada. A Figura 104 apresenta a simulação com
as entradas I2 e I6 iluminadas e a saída Q2 ficando iluminada.
Figura 104 - Entradas I2 e I6 verdadeiras fazendo a saída Q2 verdadeira.

117
Com isso, está sendo simulado que a cabina está descendo com velocidade de inspeção
e quando chegar ao sensor fundo do poço, ela deve subir com velocidade baixa. Ou seja,
em seguida, as entradas I4 e I6 são selecionadas (a porta continua fechada, por isso I6
continua selecionada) e com isso a saída Q3 fica iluminada, conforme Figura 105.
Figura 105 – Entradas I4 e I6 verdadeiras fazendo a saída Q3 verdadeira.
De acordo com a simulação, a cabina, agora, está subindo com velocidade baixa e
quando ela encontrar com o sensor de 1º pavimento, ela deve frear. Ou seja, as entradas
I5 e I6 são selecionadas e, consequentemente, a saída Q4 fica iluminada, conforme a
Figura 106.
Figura 106 – Entradas I5 e I6 fazendo a saída Q4 verdadeira.
A cabina é freada já que foram retiradas as ações de saída, sentido sobe e velocidade
baixa, que estavam sendo enviadas ao inversor de frequência (Q3 foi apagado), logo o

118
inversor freia a cabina. Além disso a ação FCI é enviada ao circuito principal, GRAFCET
parcial G3, e é usada para dar início à evolução do GRAFCET G3.
Ou seja, foi possível simular os diagramas ladders que controlam o sistema da
maquete, verificando a evolução de cada GRAFCET parcial. Ou seja, a conversão dos
três pares de GRAFCETs (G1-G4, G2-G5, G3-G6) em diagrama ladder foi um sucesso,
sendo possível começar os testes na maquete do elevador.
5.2. Teste na Maquete do Elevador
Para iniciar os testes diretamente na planta é necessário enviar os diagramas ladder do
programa Zelio soft 2 para os CLPs. Para isso, é preciso conectar cada CLP ao computador
por meio de um cabo e enviar o programa para o CLP selecionando a opção indicada na
Figura 107.
Figura 107 – Transferência do ladder do computador para os CLPs.
Após a transferência de cada diagrama ladder para seus respectivos CLPs, iniciaram-
se os testes diretamente na maquete que funcionou conforme projetada, sendo possível
que qualquer um interaja com ela como se fosse um elevador de passageiro de dois
andares, lembrando que os testes e o uso da maquete não devem exceder o tempo de cinco
minutos.
A maquete realiza o modo inspeção, abre e fecha a porta, atende as chamadas de forma
correta (finalizando a chamada atual para atender a chamada futura), a cabina se desloca
de acordo com a curva de velocidade parametrizada e o sistema de freio funciona muito
bem, não só estacionando a cabina nos pavimentos, como freando imediatamente a cabina
quando uma emergência ocorre ou é simulada.

119
6. Conclusão
Neste trabalho foi apresentada a construção de uma maquete de um elevador de dois
pavimentos que simula, com boa semelhança à realidade, o funcionamento de um
elevador de passageiros, atendendo os objetivos propostos para o projeto na seção 1.2.
Foi elaborado também um GRAFCET global que representa o comportamento da
maquete e que foi convertido em diagrama ladder utilizando um método de conversão
específico para CLP Zelio Logic da Schneider. Conforme foi mostrado, foram criados três
diagramas ladders e cada um foi inserido em um CLP que recebiam os eventos externos
e executavam ações a fim de controlar a maquete. Foi usado um inversor de frequência
CFW300 da WEG para acionar um motor de indução para movimentar a cabina e foi
elaborado um freio eletromecânico que foi usado para frear e estacionar a cabina. Todo o
processo de elaboração da maquete foi muito bom para aplicar os conhecimentos
adquiridos no curso de engenharia elétrica da UFRJ.
Como trabalhos futuros são propostos a criação de uma maquete com mais pavimentos
com uma lógica de controle que atenda a todos os andares, utilização de outra linguagem
(SFC, ST e IL) para controlar a maquete, substituição dos CLPs da Schneider por outros
de marca alternativa, substituição do inversor de frequência da WEG por outro, ou a
criação de uma maquete mais completa, que apresente todas, ou quase todas as estruturas
de um elevador, por exemplo, adicionar portas de pavimentos, Leds para indicar o andar,
sinais sonoros para indicar que a cabina chegou em um pavimento, sensores
infravermelhos para colocar nas portas, ou até mesmo a utilização de encoder que informa
distância percorrida e velocidade ao inversor de frequência.

120
Referências Bibliográficas
[1] GELMETI, P. e PIERRY, R. B., “Prefeitura de São Paulo registra elevadores
desde a década de 1930,” 14 Junho 2012. [Online]. Available:
http://www.prefeitura.sp.gov.br/cidade/secretarias/upload/chamadas/14_1339684
076.06. [Acesso em 12 Outubro 2019].
[2] LANDMARK, LandMark Elevator, inc., 15 Fevereiro 2016. [Online]. Available:
https://landmarkelevator.com/history-of-elevator-technology/. [Acesso em 28
Outubro 2019].
[3] ELEVATOR HISTORY, 2019. [Online]. Available:
http://www.elevatorhistory.net/elevator-inventor/elisha-otis/. [Acesso em 1
Novembro 2019].
[4] NAPOLI, J. F. C., “Projeto de um Sistema de Automação para um Elevador de
Passageiros Utilizando Redes de Petri,” Projeto Final de Graduação, UFRJ -
Escola Politécnica, Rio de Janeiro, RJ - Brasil, 2013.
[5] MONTEZANO, A. F. M., “Modelo em Rede de Petri de um Sistema de
Automação de um Elevador de Passageiros,” UFRJ, Rio de Janeiro, RJ - Brasil,
2009.
[6] MOREIRA, M. V. and BASILIO, J. C., “Bridging the Gap Between Design and
Implementation of Discrete-Event Controllers,” IEEE Transactions on
Automation Science and Engineering, v. 11, n. 1, p. 48-65, 2013.
[7] ABNT/CB-04, Norma NBR NM 207, Elevadores elétricos de passageiros -
Requisitos de segurança para construção e instalação, ABNT, 1999.
[8] IEC, International Standard IEC 60848, 2ª ed., 2002.
[9] SLEMON, G. R., “On the Disign of High-Performance Surface-Mounted PM
Motors,” 1994.

121
[10] BERTONHA, L. C., “Controle escalar V/f do motor de indução monitorando o
fluxo de entreferro via terceira harmônica de tensão,” Dissertação submetida ao
DSCE/FEEC/UNICAMP, Campinas, SP - Brasil, p. 3-6, 2006.
[11] SEN, P. C., “Principles of Electrical Machines and Power Eletronics,” Kingston,
Ontario, Canada, John Wiley & Sons, p. 214-216, 1996.
[12] WEG S. A., Março 2018. [Online]. Available:
https://www.wolfautomation.com/media/pdf/ac-
drives/WEG/cfwthreehund/WEG-cfw300-v1-3x-programmanual.pdf. [Acesso em
10 Novembro 2019].
[13] SCHNEIDER ELECTRIC, Outubro 2017. [Online]. Available:
https://www.electrocentr.com.ua/files/documentation/SE/plc/zelio/guide/ZelioLo
gic_prog_manual_2017_en.pdf. [Acesso em 20 Novembro 2019].
[14] ATLAS SCHINDLER, “Manual de Transporte Vertical em Edifícios;
Elevadores de Passageiros, Escadas Rolantes, Obra Civil e Cálculo de Tráfego,”
p. 32, Dezembro 1999. [Online]. Available:
https://www.schindler.com/content/dam/web/br/pdf/ni/manual-transporte-
vertical.pdf. [Acesso em 10 Novembro 2019].
[15] CASA DO ELEVADOR - Distribuidor Exclusivo ELEVATEC, Casa do
Elevador, 2012. [Online]. Available:
http://www.casadoelevador.com.br/limitador.htm. [Acesso em 3 Novembro
2019].
[16] WT COMANDOS ELETRÔNICOS, 2017. [Online]. Available:
http://www.wtcomandoseletronicos.com.br/7.html. [Acesso em 18 Novembro
2019].
[17] ADDTECH TECNOLOGIA, “Quadro de Comando MC16R-VVVF, Manual de
Apresentação,” Março 2017. [Online]. Available:
https://docplayer.com.br/108346488-Quadro-de-comando-manual-de-
apresentacao.html. [Acesso em 27 Novembro 2019].

122
[18] CABLEMAX Cabos de Aço e Acessórios LTDA, 2010. [Online]. Available:
http://www.cabosdeacocablemax.com.br/tabela-de-cabos-de-aco.html. [Acesso
em 3 Novembro 2019].
[19] SCHNEIDER ELECTRIC, 2017. [Online]. Available:
https://www.se.com/br/pt/product/download-pdf/SR2D101BD. [Acesso em 15
Novembro 2019].
[20] SCHNEIDER ELECTRIC, 2017. [Online]. Available:
https://www.se.com/br/pt/product/download-pdf/SR2B202BD. [Acesso em 20
Novembro 2019].
[21] WEG S. A., 21 Outubro 2019. [Online]. Available:
https://static.WEG.net/medias/downloadcenter/hce/h5d/WEG-CFW300-user-
manual-10003325037-en-es-pt.pdf. [Acesso em 10 Novembro 2019].
[22] CROMATEK, 7 Novembro 2012. [Online]. Available:
https://cromatek.com.br/datasheet/reles/rele-CTK-1C-24VCC-15A.pdf. [Acesso
em 15 Novembro 2019].
[23] METALTEX, 2014. [Online]. Available:
https://datasheetspdf.com/parts/AX1RC2.pdf?id=1264798. [Acesso em 15
Novembro 2019].
[24] WEG S.A, “Folha de Dados - Contatores,” 27 Agosto 2019. [Online]. Available:
https://www.WEG.net/catalog/WEG/BR/pt/Automa%C3%A7%C3%A3o-e-
Controle-Industrial/Controls/Partida-e-Prote%C3%A7%C3%A3o-de-
Motores/Contatores/Pot%C3%AAncia/Contatores-CWB/CONTATOR-CWB12-
11-30C02/p/13192977. [Acesso em 15 Novembro 2019].
[25] VULKAN DRIVE TECH, “Catálogo Técnico: Frenos y Accesorios para
Aplicaciones Industriales,” p. 10, Outubro 2018. [Online]. Available:
https://www.vulkan.com/es-es/drivetech/Documents/Brakes-Technical-Data-ES-
PT.pdf. [Acesso em 20 Novembro 2019].


















