Describing Function Calculations for Some Common Nonlinearities
25
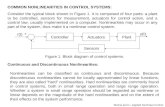
1 | Page Detailed Describing Function Calculations for Some Common Nonlinearities (I) First Nonlinearity: Saturation with Dead Band Figure NL1: A Plot of the Saturation-with-Dead-Band Nonlinearity We are to show that the describing function for the Saturation-with-Dead-Band nonlinearity, with the input assumed to be = (1) is given by , = 〈 if < (2) , = −− 〈 if <<, (3) , = −− 〈 if > (4) where and are respectively given by = (5) and = (6) − − −
-
Upload
desinamichael -
Category
Documents
-
view
21 -
download
0
description
control Engineering notes
Transcript of Describing Function Calculations for Some Common Nonlinearities

1 | P a g e
Detailed Describing Function Calculations for Some
Common Nonlinearities
(I) First Nonlinearity: Saturation with Dead Band
Figure NL1: A Plot of the Saturation-with-Dead-Band Nonlinearity
We are to show that the describing function for the Saturation-with-Dead-Band nonlinearity,
with the input assumed to be � = � ��� �� (1) is given by
��, �� = �⟨�� if � < � (2)
��, �� = ��� ��� − � − ��� ��� � ⟨�� if � < � < �, (3)
��, �� = ��� �� − � − ��� ������� ��� � ⟨�� if � > �
(4)
where � and � are respectively given by
� = ����� !"�#
(5)
and
� = ����� !$�#
(6)
����
%
−% −� −� � �
&���

2 | P a g e
and the gradient � is given by � = %� − �
(7)
Solution
Situation 1: ' < �
Figure 1: The Sketch of &��� vs �� for the Saturation-with-Deadband Nonlinearity �� < ��
Using Sketches of &���v ���� (the nonlinearity) and ����v ��
It is clear from the sketches of Figure 1 that when ' < �, the input operates entirely in
the dead-band, meaning that the output will always be zero.
For this, there is no need for any calculation of a describing function since it is clear that
it will always be zero.
Therefore,
����
%
−% −� −� � �
�
��
&���
�
&���
� = � ()* ��
����
��
If � < � for Saturation with Dead Band, then ��, �� = �⟨��

3 | P a g e
Situation 2: � < ' < +
First Step: Drawing Out the Three Sketches
Figure 2: The Sketch of &��� vs �� for the Saturation-with-Deadband Nonlinearity �� < � < +�
Using Sketches of &���v ���� (the nonlinearity) and ����v ��
Second Step: Writing Out The Equations
From the graph of &��� against ,- of Figure 2, it is easy to write out the equations as
&��� = �, � ≤ �� < ��
= ��� ��� �� − ��, �� < �� < ��
= �, �� < �� < �/
= ��� ��� �� + ��, �/ < �� < �1
= �, �1 < �� < �� (8)
where ��, ��, �/, and �1 are the �� values corresponding to the points A, B, C, and D in Figure
2.
����
%
−% −� −� � �
�
��
&���
� � ��
B is the point � = � 2�� < ,- < 34
A is the point � = � 2� < ,- < ��4
C is the point � = −� 2� < ,- < /�� 4
D is the point � = −� 2/�� < ,- < 234
6 7
8 9
&���
� = � ()* ��
����
��

4 | P a g e
Third Step: Checking for Odd and Half-Wave Symmetries
By inspection, the nonlinearity displays odd symmetry and the output displays half-wave
symmetry with respect to time.
Fourth Step: Calculation of :; Using Expression for Half-Wave-Symmetrical Nonlinearities
��, �� = 7�� ⟨�� 9
where
7� = 1� < &�����
� ��� �� ��� ≠ �
10
&��� = �, � ≤ �� < ��
= ���> ��� �� − ��, �� < ,- < ��
11
Therefore,
7� = 1� < &�����
� ��� �� ���
7� = 1� ?@@A< ���
� ��� �� ��� + <���� ��� �� − ����
��� ��� �� ���BCC
D
7� = 1� ?@@A <���
����
���� �� − �� ��� ������BCCD
12
We recall from our elementary trigonometry that
EF� �G = � − � ���� G 13
or ���� G = � − EF� �G�
14

5 | P a g e
Therefore, making appropriate substitutions in (12) gives us
7� = 1� <�����
��H� − EF� ���� I − �� ��� ������
7� = 1� <���� [� − EF� ���]��
��− �� ��� ��� ���
7� = ���� H�� − ��� ���� I |��M����M�� − 1��� [−EF� ��] |��M����M��
7� = ���� N�� − ��� � 2��4� − �� + ��� ���� O + 1��� �EF� �� − EF� ��� 7� = ���� H�� − ��� �� − �� + ��� ���� I − 1��� EF� ��
7� = ���� H�� − �� + ��� ���� I − 1��� EF� ��
7� = �� − ������ + ����� ���� − 1��� EF� ��
15
Now, we know that when
� = �, �� = �� 16
Thus, making substitutions into the input sinusoid equation
� = � ��� �� 17
leads to
� = � ��� �� 18
which eventually leads to
�� = ����� !"�#
19
Also, from the well-known elementary identity
����P + EF��P = � 20

6 | P a g e
we know that
EF� P = √� − ����P 21
which means that
EF� �� = R� − ������ = S� − �"��� = R������ 22
Substituting for EF� �� in (15) gives
7� = �� − ������ + ����� ���� − 1��� √�� − ���
23
Using (23), the describing function is therefore given by
��, �� = 7�� ⟨��
i.e.
��, �� = �� T�� − ������ + ����� ���� − 1��� √�� − ��� U ⟨��
��, �� = V� − ����� + ���� ���� − 1��� √�� − ���� W ⟨��
24
Now, we can re-write 1��� R������� as
1��� √�� − ���� = 1�� . �� . √�� − ��� = 1�� . ��� �� . EF� ��
25
and since we know from elementary trigonometry that
��� ��� = � ��� �� . EF� �� 26
then 1��� √�� − ���� = ��� . ���� �� . EF� �� = �� ��� ����
27
Therefore (24) can be re-written as

7 | P a g e
��, �� = H� − ����� + ���� ���� − �� ��� ���� I ⟨��
��, �� = H� − ����� − ���� ���� I ⟨��
28
For good measure, we can factor out ��� in (28) to get ��, �� = ��� H�� − �� − ��� ���� I ⟨��
29
��, �� = ��� H�� − �� − ��� ���� I ⟨��
�� = ����� !"�# ; � = %� − �
If � < � < � for Saturation with Dead Band, then
where �� is given by

8 | P a g e
Situation 3: ' > + First Step: Drawing Out the Three Sketches
Figure 3: The Sketch of &��� vs �� for the Saturation-with-Deadband Nonlinearity �� > ��
Using Sketches of &���v ���� (the nonlinearity) and ����v ��
Please let me know if any bit of the sketching of this diagram is not clear to you.
Because of lack of space, I have left out the description of the points ,- = Z[, ,- =Z\, ,- = Z] and ,- = Z^ from the x vs. ,- plot. However, it should be easy to deduce
that these points correspond respectively to the points E, F, G, and H on the y vs ,- plot.
����
%
−% −� −� � �
�
��
&���
� � ��
A is the point � = � 2� < ,- < ��4
B is the point � = � 2� < ,- < ��4
C is the point � = � 2�� < ,- < �4
D is the point � = � 2�� < ,- < �4
E is the point � = −� 2� < ,- < /�� 4
F is the point � = −� 2� < ,- < /�� 4
G is the point � = −� 2/�� < ,- < 2�4
H is the point � = −� 2/�� < ,- < 2�4
6
7
_ `
&��� � = � ()* ��
����
��
7 8 9 a b
�� = �� �corr. to pt. 6)
�� = �� (corr. to pt. B)
�� = �/ (corr. to pt. C) �� = �1 (corr. to pt. D)

9 | P a g e
Second Step: Writing Out The Equations
From the graph of &��� against ,- of Figure 3, we can write out the equations as
&��� = �, � ≤ �� < ��
= ��� ��� �� − ��, �� < �� < ��
= %, �� < �� < �/
= ��� ��� �� − ��, �/ < �� < �1
= �, �1 < �� < �c
= ��� ��� �� + ��, �c < �� < �d = %, �d < �� < �e
= ��� ��� �� − ��, �e < �� < �f
= �, �f < �� < �� (30)
where �), ) = �, �, … . f are the �� values corresponding to the points A, B, C, D, E, F, G, and H
respectively in Figure 3.
Third Step: Checking for Odd and Half-Wave Symmetries
By inspection, the nonlinearity displays odd symmetry and the output displays half-wave
symmetry with respect to time.
Fourth Step: Calculation of :; Using Expression for Half-Wave-Symmetrical Nonlinearities Again, we write
��, �� = 7�� ⟨�� 31
where
7� = 1� < &�����
� ��� �� ��� ≠ �
32
&��� = �, � ≤ �� < ��
= ��� ��� �� − ��, �� < �� < ��
= %, �� < �� < ��
33
Therefore,

10 | P a g e
7� = 1� < &�����
� ��� �� ���
7� = 1� ?@@A< ���
� ��� �� ��� + < ���� ��� �� − ������
� ��� �� ��� + < %��
�� ��� �� ���BCC
D
7� = 1� ?@@A < ���� ��� �� − ����
��� ��� �� ��� + < %
����
��� �� ���BCCD
34
Let us make �� = � �� = � 35
(34) then becomes
7� = 1� ?@@A<���� ��� �� − ���
� � ��� �� ��� + < %��
� ��� �� ���BCCD
7� = 1� ?@@A<��� ()*� �� − �� ()* ���������
� + < %��
� ��� �� �����BCCD
36
Again, using the relation ���� G = � − EF� �G�
37
in (36) gives us
7� = 1� ?@@A< !�� H� − EF� ���� I − �� ��� ��# ������
� + < %��
� ��� �� �����BCCD
7� = 1� H!��� H�� − ()* ���� I + �� EF� ��# |��M���M� − [% hi( ��] |��M���M�� I
7� = 1� H!��� H� − ()* ��� I + �� EF� �# − !��� H� − ()* ��� I + �� EF� �# − % � hi( �� − hi( �� I

11 | P a g e
7� = 1� H!��� �� − �� + ��1 �()* �� − ()* ��� + �� �EF� � − EF� �# + %hi( � I
38
Let us expand (38).
7� = ���� �� − �� + ��� �()* �� − ()* ��� + 1��� �EF� � − EF� �� + 1%� hi( � 39
Pulling out jklm from the RHS of (39) gives
7� = ���� H�� − �� + ��� ���� �()* �� − ()* ��� + 1��� ���� �EF� � − EF� ��+ 1%� ���� hi( � I
7� = ���� H�� − �� + �� �()* �� − ()* ��� + � �� �EF� � − EF� �� + �%�� hi( � I
40
Now, we know that when
� = �, �� = � 41 � = �, �� = � 42
Thus, as we did for the second case earlier,
� = � ��� �� 43
leads to
� = � ��� � 44
and
� = � ��� � 45
So that ��� � = ��
46
and ��� � = ��
47
Again, using the identity
����P + EF��P = � 48
gives
EF� P = √� − ����P 49

12 | P a g e
which means that
EF� � = √� − ����� = S� − �"��� = R������ 50
EF� � = R� − ����� = S� − �$��� = R������ 51
Let us take a part of (40) and re-write it in trigonometric form i.e. let n = � �� �EF� � − EF� �� + �%�� hi( �
52
Then, we can write n = � �� EF� � − � �� EF� � + �%�� hi( �
n = � �� EF� � − � �� EF� � + �. %� ! ��# hi( �
53
and since � = %� − �
54
we have (53) becoming n = � �� EF� � − � �� EF� � + �. %� !� − �% # hi( �
n = � �� EF� � − � �� EF� � + �. !� − �� # hi( �
n = � �� EF� � − � �� EF� � + �. !�� − ��# hi( �
n = � �� EF� � − � �� EF� � + �. �� hi( � − �. �� hi( �
55
Replacing �� and
�� with ��� � and ��� � respectively gives n = � ��� � EF� � − � ��� � EF� � + �. ��� � hi( � − �. ��� � hi( � n = �. ��� � hi( � − � ��� � EF� � n = ��� �� − ��� �� 56
Therefore, (40) becomes 7� = ���� H�� − �� + �� �()* �� − ()* ��� + n I
7� = ���� H�� − �� + �� �()* �� − ()* ��� + ��� �� − ��� �� I
7� = ���� H�� − �� + �� �()* �� − ()* ��� − ���� �� − ��� ���I
7� = ���� H�� − �� − �� �()* �� − ()* ���I

13 | P a g e
The describing function is therefore given by
��, �� = 7�� ⟨��
i.e. ��, �� = �� V���� H�� − �� − �� �()* �� − ()* ���IW ⟨��
��, �� = ��� H�� − �� − �� �()* �� − ()* ���I ⟨��
57
Let us now put our results together:
��, �� = ��� H�� − �� − �� �()* �� − ()* ���I ⟨��
� = ����� !"�# ; � = ����� !$�# ; � = %� − �
Therefore, if � > � for Saturation with Dead Band, then
where �, � and � are given by
��, �� = ��� H�� − � − ��� ��� I ⟨��
��, �� = ��� H�� − �� − �� �()* �� − ()* ���I ⟨��
� = ����� !"�# ; � = ����� !$�# ; � = %� − �
For a system with a Saturation-with-Dead-Band nonlinearity (of Figure
NL1) excited by a sinusoidal input � = � ��� ��;
(A) If � < �, then ��, �� = �⟨��;
(B) If � < � < �, then
(C) If � > �, then
where �, � and � are given by

14 | P a g e
(II) Second Nonlinearity: Variable-Gain Nonlinearity
Figure NL2: A Plot of the Variable-Gain Nonlinearity
We are to show that the describing function for the Variable-Gain nonlinearity is given
by
o�, �p = %⟨�� if � < �
58
o�, �p = q %# −�� o%# − %p 2� + ()* ��� 4s ⟨�� if � > �
59
where � is given by � = ()*�� !��#
60
−� �
&���
���� %
%#
%#

15 | P a g e
Solution:
Situation 1: ' < �
First Step: Drawing Out the Three Sketches
Figure 4: The Sketch of &��� vs �� for the Variable-Gain Nonlinearity �� < �� Using Sketches
of &���v ���� (the nonlinearity) and ����v ��
Since the input t = ' sin ,- stays within the first linear domain defined by the gain x = yzt, then the output is strictly a scaled version of the input sinusoid, as shown in the
graph of y against ,-.
�
��
&���
� � ��
&���
� = � ()* ��
����
−� �
&���
����
%
%#
%#
��

16 | P a g e
Second Step: Writing Out The Equations
From the graph of &��� against ,- of Figure 2, it is easy to write out the equations as
&��� = %�, � ≤ �� < �� 61
Which leads on to
&��� = % � ��� �� ; � < �� < ��
62
Third Step: Checking for Odd and Half-Wave Symmetries
Again, by inspection, the nonlinearity displays odd symmetry and the output displays
half-wave symmetry with respect to time.
Fourth Step: Calculation of :; Using Expression for Half-Wave-Symmetrical Nonlinearities
��, �� = 7�� ⟨�� 63
where
7� = 1� < &�����
� ��� �� ��� ≠ �
64
&��� = % � ��� �� ; � < �� < ��
65
Therefore,
7� = 1� < &�����
� ��� �� ���

17 | P a g e
7� = 1� ?@@A<[% � ��� ��] ��� ��
��� �����BCC
D 7� = 1� ?@@
A< % � ���� ����
� �����BCCD
7� = 1%�� ?@@A< H� − EF� ���� I
��� �����BCC
D 7� = �%�� ?@@
A<[� − EF� ���]��
� �����BCCD
7� = �%�� H�� − ��� ���� I |��=���=�� 7� = �%�� H�� − ��� �� − � + ��� �� I
7� = �%�� ���� 7� = %� 66 Therefore (63) can be re-written as
��, �� = �� [%�]⟨��
��, �� = %⟨��
67
If � < � for the Variable-Gain Nonlinearity, then ��, �� = %⟨��

18 | P a g e
Situation 2: ' > �
First Step: Drawing Out the Three Sketches
Figure 5: The Sketch of &��� vs �� for the Variable-Gain Nonlinearity �� > �� Using Sketches
of &���v ���� (the nonlinearity) and ����v ��
Since the input t = ' sin ,- goes outside the first linear domain defined by the gain x = yzt, and into the region defined by the graphs with slope %#, the output is going to
be a combination of two different sinusoids, scaled by the two gradients yz and %#, as
shown in the graph of y against ,-.
�
��
&���
� � ��
&���
� = � ()* ��
����
−� �
&���
����
%
%#
%#
��
�� �� �/ �1
��
�� �/ �1

19 | P a g e
Second Step: Writing Out The Equations
I’ll take some time to explain how the equations can be derived.
Let us first write out the input-output equations (i.e. y against x).
For convenience, I will redraw the graph of Figure NL2 as Figure 6 below:
Figure 6: A Repeated Plot of the Variable-Gain Nonlinearity
Let us split the graph into 3 domains i.e. the domains t < −�, −� < t < � and t > �
Domain 1: � < −�
We recall that, for a straight line & = >� + h 68
Thus, for the line of gradient yz# in the domain t < −�, we can replace { with yz# in
(68) to get
& = %#� + h� 69
−� �
&���
����
%
%#
%#

20 | P a g e
I have used h� here to distinguish it from that of Domain 3 that we will get to shortly.
Our task now is to get the value of h�.
If we look at Figure 6, we will see that at the point of intersection of domains 1 and 2 (i.e.
the point t = −�), the value of y is given by relating the gradient % with x and – � i.e.
% = [� − & |�M��][� − �−��]
& |�M�� = −%� 70
Therefore, when � = −�, then & = −%�.
Replacing & with −%� and � with – � in (69) gives
−%� = %#�−�� + h�
h� = �%# − %�� 71
Thus, for domain 1, the equation of the line segment is
& = %#� + �%# − %�� 72
Domain 2: −� < � < �
The equation here is very straightforward and is given by & = %� 73
Domain 3: � > �
We use the same method used for the calculation of the equation of the line segment of
domain 1 i.e. we have
& = %#� + h� 74
Again, at the point of intersection of domains 2 and 3 (i.e. the point t = �), the value of y
is given by relating the gradient % with x and � i.e.
% = [& |�M� − �][� − �]
& |�M� = %� 75

21 | P a g e
Therefore, when � = �, then & = %�.
Replacing & with %� and � with � in (74) gives
%� = %#��� + h�
h� = �% − %#�� 76
Thus, for domain 3, the equation of the line segment is
& = %#� + �% − %#�� 77
Let us put our results together.
Now, back to our sketches of Figure 5, the relevant equations are found to be
&��� = %� = %� ()* ��, � ≤ �� < ��
&��� = %#� + o% − %#p�
= %#� ()* �� + o% − %#p�, �� ≤ �� < �� &��� = %� = %� ()* ��, �� ≤ �� < �/
&��� = %#� + �%# − %�� = %#� ()* �� + o%# − %p�, �/ ≤ �� < �1
&��� = %� = %� ()* ��, �1 ≤ �� < ��
78
& = %#� + �%# − %��
& = %�
& = %#� + �% − %#�� & = %�
(A) If t < −� then
(B) If −� < t < � then
(C) If t > � then

22 | P a g e
Third Step: Checking for Odd and Half-Wave Symmetries
Again, by inspection, the nonlinearity displays odd symmetry and the output displays
half-wave symmetry with respect to time.
Fourth Step: Calculation of :; Using Expression for Half-Wave-Symmetrical Nonlinearities
��, �� = 7�� ⟨�� 79
where
7� = 1� < &�����
� ��� �� ��� ≠ �
80
&��� = %� ()* ��, � ≤ �� < ��
&��� = %#� ()* �� + o% − %#p�, �� ≤ �� < �� 81
Therefore,
7� = 1� < &�����
� ��� �� ���
7� = 1� ?@@A< [% � ��� ��] ��� ����
� ����� + <[%#� ()* �� + o% − %#p�] ��� ����
�������BCC
D 7� = 1� ?@@
A< [% � ���� ��]��� ����� + <[%#� ���� �� + o% − %#p� ��� ��]
����
�����BCCD
7� = 1� ?@@A< H% � �� − hi( ����� I��
� �����+ <[%#� �� − hi( ����� + o% − %#p� ��� ��]
����
�����BCCD

23 | P a g e
7� = 1� V%�� H �� − ��� ���� I |��M���M��
+ V%#�� !�� − ��� ���� # − o% − %#p� EF� ��W |��M����M�� W 7� = 1� }%�� H �� − ��� ���� − � + ��� ����� I
+ N%#�� ~�� − ��� � 2��4� � − o% − %#p� EF� 2��4− %#�� !�� − ��� ���� # + o% − %#p� EF� ��O�
7� = 1� N%�� H �� − ��� ���� I+ V%#�� 2��4 − %#�� !�� − ��� ���� # + o% − %#p� EF� ��WO
7� = 1� N�� [% − %#] H �� − ��� ���� I + V%#��1 + o% − %#p� EF� ��WO
82
Let us expand (82) 7� = ��� �% − %#� H �� − ��� ���� I + %#� + 1�� o% − %#pEF� ��
83
Let us now “pull” X out of (83) i.e. 7� = � !�� �% − %#� H �� − ��� ���� I + %# + 1��� o% − %#p EF� ��#
84
Let n = 1��� o% − %#p EF� ��
85
We can re-write (85) as n = 1� �� o% − %#p EF� ��
86
and remembering that

24 | P a g e
()* �� = ��
87
makes (86) to become n = 1� ��� ��o% − %#p EF� ��
n = �� o% − %#p [���� �� EF� ��] n = �� o% − %#p ��� ���
88
Therefore, (84) becomes 7� = � !�� �% − %#� H �� − ��� ���� I + %# + n#
7� = � !%# + �� �% − %#� H �� − ��� ���� I + n#
7� = � !%# + �� �% − %#� H �� − ��� ���� I + �� o% − %#p ��� ���#
7� = � !%# + �� �% − %#� H �� − ��� ���� + ��� ���I#
7� = � !%# + �� �% − %#� H �� + !� − ��# ��� ���I#
7� = � !%# + �� �% − %#� H �� + �� ��� ���I#
7� = � !%# − �� �%# − %� H �� + �� ��� ���I#
89
Therefore (79) can be re-written as
��, �� = �� H� !%# − �� �%# − %� H �� + �� ��� ���I#I ⟨��
��, �� = !%# − �� �%# − %� H �� + �� ��� ���I# ⟨��
90
Let us put all our results for the Variable-Gain Nonlinearity together. The results are summarized
on the next page:

25 | P a g e
N.B.
[1] These solutions are not really as long as you see them. I have only made them this
long for the sake of clarity. You need not be intimidated by the length.
[2] I will try to send the solutions of the others before your mid-semester test. However, I
cannot guarantee that I’ll be able to do so. I have a lot to deal with now. I’ll advise us to
try these things out on our own. However, if you have challenges, please feel free to let
me know.
[3] All the best, as you “stretch your mathematical nerves a bit”! I’m sure you will be fine
in the end.
!%# − �� �%# − %� H �� + �� ��� ���I# ⟨��
� = ����� !"�#
For a system with a Variable-Gain nonlinearity (of Figure NL2)
excited by a sinusoidal input � = � ��� ��;
(A) If � < �, then ��, �� = %⟨��
(B) If � > �, then
where � is given by