DEFINITION AND TESTING OF AN ARCHITECTURAL...
27
D EFINITION AND T ESTING OF AN A RCHITECTURAL T RADESPACE FOR O N-ORBIT A SSEMBLERS AND S ERVICERS 1 October 2014 Christopher Jewison David Sternberg, Bryan McCarthy, David Miller, Alvar Saenz-Otero IAC-14- D1-4.1x23285 65th International Astronautical Congress, Toronto, Canada. Copyright ©2014 by Massachusetts Institute of Technology (MIT). Published by the IAF, with permission and released to the IAF to publish in all forms.
Transcript of DEFINITION AND TESTING OF AN ARCHITECTURAL...

DEFINITION AND TESTING OF AN
ARCHITECTURAL TRADESPACE FOR
ON-ORBIT ASSEMBLERS AND SERVICERS
1 October 2014
Christopher Jewison
David Sternberg, Bryan McCarthy, David Miller, Alvar Saenz-Otero
IAC-14- D1-4.1x23285
65th International Astronautical Congress, Toronto, Canada. Copyright ©2014 by Massachusetts Institute of Technology (MIT).
Published by the IAF, with permission and released to the IAF to publish in all forms.

Motivation • On-orbit assembly, servicing,
and spacecraft reconfiguration
• Mission-specific designs stem from principal architectural decisions
• Currently no comprehensive study of full tradespace of on-orbit assemblers and servicers
IAC-14- D1-4.1x23285 1 of 20 1-October-2014
[DA
RP
A]
• Goal: select the correct architecture • Definition of tradespace
• Qualitative analysis of chosen architectures
• Discusses current and future experiments in support of analysis quantification
NASA
DARPA

On-Orbit Assembly Architectures • Three continuous axes
• Integrated vs. External • Integrated – servicing/assembly
functions are inherent to satellite itself
• External – servicing/assembly functions are performed by external spacecraft
• Centralized vs. Distributed • Centralized – servicing/assembly
function contained in single, central entity
• Distributed – servicing/assembly function distributed amongst multiple entities
• Prox Ops vs. Captured • Proximity Operations – some or all
components of the system are not captured at all times and must fly independently
• Captured – all components of the system are fully captured at all times
Note: initial rendezvous and final separation are not considered proximity operations in this nomenclature
Eight architecture extremes
help define the tradespace
IAC-14- D1-4.1x23285 2 of 20
Prox Ops Captured
Integrated
External
Centralized
Distributed
1 2
3 4
5 6
7 8
1-October-2014

On-Orbit Assembly Architectures
Architecture
Number 1 2 3 4
Description
Integrated
Distributed
Prox Ops
Integrated
Distributed
Captured
Integrated
Centralized
Prox Ops
Integrated
Centralized
Captured
Nickname “Beehive”
“Integrated
Construction
Crew”
“Integrated
Tug” “Spider”
Architecture
Number 5 6 7 8
Description
External
Distributed
Prox Ops
External
Distributed
Captured
External
Centralized
Prox Ops
External
Centralized
Captured
Nickname “Carrier”
“External
Construction
Crew”
“External
Tug” “Shuttle”
IAC-14- D1-4.1x23285 3 of 20 1-October-2014

Sample CONOPS
IAC-14- D1-4.1x23285 4 of 20 1-October-2014
1
4
3 2
5 6
5 7
4
3 2 1
6 5 7
4
3 2 1
6
5 7
4
3 2 1
6
5 7
4 3
2 1
6 5 7
4 3 2 1
6
5
7
4 3 2 1
6
Active module
Passive module
Robotic arm
Architecture 1: “Beehive”
Integrated, Distributed, Prox Ops

Sample CONOPS
IAC-14- D1-4.1x23285 5 of 20 1-October-2014
1
4
3 2
5 6
5 7
4
3 2 1
6 5 7
4
3 2 1
6
5 7
4
3 2 1
6
5 7
4 3
2 1
6 5 7
4 3 2 1
6
5
7
4 3 2 1
6
Active module
Passive module
Robotic arm
Architecture 2: “Integrated Crew”
Integrated, Distributed, Captured
1
4
3 2
5 6
5 7
4
3 2 1
6 5
7
4
3 2 1
6
5
7
4
3
2 1
6
5 7
4 3
2 1
6
5
7
4 3 2 1
6
4 3 2 1 5
7
6

Sample CONOPS
IAC-14- D1-4.1x23285 6 of 20 1-October-2014
1
4
3 2
5 6
5 7
4
3 2 1
6 5 7
4
3 2 1
6
5 7
4
3 2 1
6
5 7
4 3
2 1
6 5 7
4 3 2 1
6
5
7
4 3 2 1
6
Active module
Passive module
Robotic arm
Architecture 3: “Integrated Tug”
Integrated, Centralized, Prox Ops
1
4
3 2
5 6
5 7
4
3 2 1
6 5
7
4
3 2 1
6
5
7
4
3
2 1
6
5 7
4 3
2 1
6
5
7
4 3 2 1
6
4 3 2 1 5
7
6
1 3 2
4 5 6
5
4
3 2 1
4
3 2 1
5 4
3 2 1
5
5
4 3
2
5
4 3 2
1
4 3 2 1
5
1

Sample CONOPS
IAC-14- D1-4.1x23285 7 of 20 1-October-2014
1
4
3 2
5 6
5 7
4
3 2 1
6 5 7
4
3 2 1
6
5 7
4
3 2 1
6
5 7
4 3
2 1
6 5 7
4 3 2 1
6
5
7
4 3 2 1
6
Active module
Passive module
Robotic arm
Architecture 4: “Spider”
Integrated, Centralized, Captured
1
4
3 2
5 6
5 7
4
3 2 1
6 5
7
4
3 2 1
6
5
7
4
3
2 1
6
5 7
4 3
2 1
6
5
7
4 3 2 1
6
4 3 2 1 5
7
6
1 3 2
4 5 6
5
4
3 2 1
4
3 2 1
5 4
3 2 1
5
5
4 3
2
5
4 3 2
1
4 3 2 1
5
1
1 3 2
4 5 6
4
3 2 1
5 5
4
3 2 1
3
5
5
4 3
2
1
5
4 3 2 1
4 3 2 1
5
4
2 1

Sample CONOPS
IAC-14- D1-4.1x23285 8 of 20 1-October-2014
Architecture 5: “Carrier”
External, Distributed, Prox Ops
Active module
Passive module
External module
Robotic arm
1 3 2
4 5 6
5
7
4
3 2 1
6
4
3 2 1
5 6
4
3
2 1
7
5
4 3
2 1
7 5 6
4 3 2 1
7
4 3 2 1
6
5
7
6
5
7
6
9 8
9 8 9 8
9 8 9 8 9 8

Sample CONOPS
IAC-14- D1-4.1x23285 9 of 20 1-October-2014
Architecture 6: “External Crew”
External, Distributed, Captured
1 3 2
4 5 6
5
7
4
3 2 1
6
4
3 2 1
5 6
4
3
2 1
7
5
4 3
2 1
7 5 6
4 3 2 1
7
4 3 2 1
6
5
7
6
5
7
6
9 8
9 8 9 8
9 8 9 8 9 8
1 3 2
4 5 6
5
6
3 1
7
5 6
4 3
2 1
7
5
6
4 3 2 1
7
5
7
6
5
7
6
5 7
6
4
3 2 1
4
2
4
3 2 1
4 3 2 1 9 8
9 8
9 8 9 8
9 8 9 8
Active module
Passive module
External module
Robotic arm

Sample CONOPS
IAC-14- D1-4.1x23285 10 of 20 1-October-2014
Architecture 7: “External Tug”
External, Centralized, Prox Ops
1 3 2
4 5 6
5
7
4
3 2 1
6
4
3 2 1
5 6
4
3
2 1
7
5
4 3
2 1
7 5 6
4 3 2 1
7
4 3 2 1
6
5
7
6
5
7
6
9 8
9 8 9 8
9 8 9 8 9 8
1 3 2
4 5 6
5
6
3 1
7
5 6
4 3
2 1
7
5
6
4 3 2 1
7
5
7
6
5
7
6
5 7
6
4
3 2 1
4
2
4
3 2 1
4 3 2 1 9 8
9 8
9 8 9 8
9 8 9 8
1 3 2
4 5 6
5
5
4 3
2
1
5
4 3 2
1
5
5 5
3
2 1
4
3 2 1
4
3 2 1
4
4 3 2 1 9 8
9 8
9 8
9 8 9 8
9 8
Active module
Passive module
External module
Robotic arm

Sample CONOPS
IAC-14- D1-4.1x23285 11 of 20 1-October-2014
Architecture 8: “Shuttle”
External, Centralized, Captured
1 3 2
4 5 6
5
7
4
3 2 1
6
4
3 2 1
5 6
4
3
2 1
7
5
4 3
2 1
7 5 6
4 3 2 1
7
4 3 2 1
6
5
7
6
5
7
6
9 8
9 8 9 8
9 8 9 8 9 8
1 3 2
4 5 6
5
6
3 1
7
5 6
4 3
2 1
7
5
6
4 3 2 1
7
5
7
6
5
7
6
5 7
6
4
3 2 1
4
2
4
3 2 1
4 3 2 1 9 8
9 8
9 8 9 8
9 8 9 8
1 3 2
4 5 6
5
5
4 3
2
1
5
4 3 2
1
5
5 5
3
2 1
4
3 2 1
4
3 2 1
4
4 3 2 1 9 8
9 8
9 8
9 8 9 8
9 8
1 3 2
4 5 6
4
2 1 2 1
5
4 3
2
1
5
4 3 2 1
5
3
5
3
5
5
4
3 2 1 4
4 3 2 1 9 8
9 8
9 8 9 8
9 8 9 8
Active module
Passive module
External module
Robotic arm

Cost
Architecture
1 Integrated Distributed
Prox Ops Beehive
2
Integrated
Distributed
Captured
Integrated Crew
3
Integrated
Centralized
Prox Ops
Integrated Tug
4
Integrated
Centralized
Captured
Spider
5
External
Distributed
Prox Ops
Carrier
6
External
Distributed
Captured
External Crew
7
External
Centralized
Prox Ops
External Tug
8
External
Centralized
Captured
Shuttle
Mobility
Rendezvous
Propellant
Decisions
Complexity of
Control
Time Efficiency
Actions
Proximity
Operations
Robotic Arm
Manipulation
Risk
Low Cost Medium Cost High Cost
IAC-14- D1-4.1x23285 12 of 20 1-October-2014

Iterative and Incremental
Testing with SPHERES
Diameter 0.22 m
Mass (w/tank & batteries) 4.3 kg
Max linear acceleration 0.17 m/s2
Max angular acceleration 3.5 rad/s2
Power consumption 13 W
Battery lifetime (replaceable) 2 hours
IAC-14- D1-4.1x23285 13 of 20 1-October-2014
Risk
Tolerance
Dynamic
Authenticity
Testing
Duration
ISS
Orbit
RGA Ground
• Testbed for the development of
multi-spacecraft GN&C algorithms
• Repeatable test conditions
• Incrementally validate algorithms
from ground testbed in 3DOF to
the ISS in 6DOF
CO2 Tank
Pressure
Regulator
Knob
Thruster
Battery Door
Ultrasound
Metrology
Receiver
Control
Panel NASA

SPHERES Ground Testing • 1DOF Rotational Control
• Benchmark data for fuel
consumption and response
time for Architecture 1 and 5
• Assess controllability of
released spacecraft from
Architectures 4 through 8
IAC-14- D1-4.1x23285 14 of 20 1-October-2014
• 3DOF Proximity Operations
• Quantify proximity operations
metrics for Architecture 3 and 7
• Assess feasibility of control
algorithms for performance of
larger systems across CONOPS

1DOF Rotational Control Ground Testing
IAC-14- D1-4.1x23285 15 of 20 1-October-2014
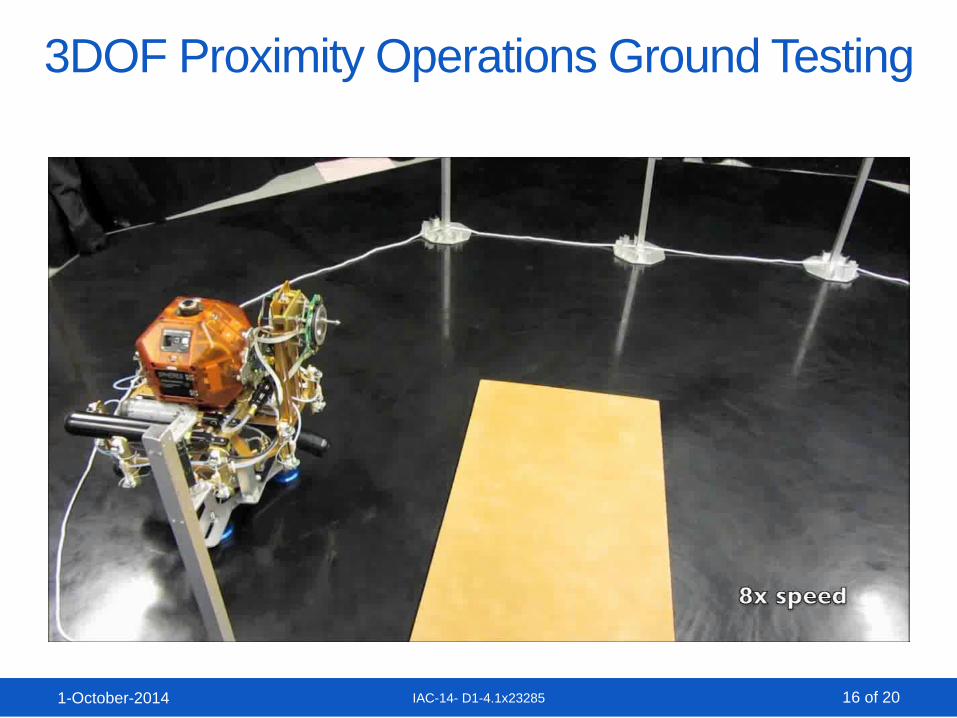
3DOF Proximity Operations Ground Testing
IAC-14- D1-4.1x23285 16 of 20 1-October-2014

Hardware Extensions to SPHERES • Halo
• Six electromechanical expansion ports
• Linux computer and power available to all peripherals
IAC-14- D1-4.1x23285 17 of 20 1-October-2014
• Universal Docking Port (UDP)
• Rigidly interconnect two satellites
• Color camera for relative navigation

ISS Testing Progression • Even small hardware gains can significantly expand testable
architecture space
• Exploit versatility of the SPHERES facility on the ISS as a testbed with traceability to many flight CONOPS
IAC-14- D1-4.1x23285 18 of 20 1-October-2014
SPHERES: 3
UDPs: 0
Halos: 0
Arms: 0
Proof Masses: 0
SPHERES: 3
UDPs: +3
Halos: 0
Arms: 0
Proof Masses: 0
SPHERES: 3
UDPs: 3+3
Halos: +1
Arms: 0
Proof Masses: 0
SPHERES: 3
UDPs: 6
Halos: 1+2
Arms: 0
Proof Masses: 0
SPHERES: 3
UDPs: 6
Halos: 3
Arms: 0
Proof Masses: +2
SPHERES: 3
UDPs: 6
Halos: 3
Arms: +2
Proof Masses: 2
SPHERES: 3
UDPs: 6
Halos: 3
Arms: 2+2
Proof Masses: 2
Prox Ops Architectures
(Tug Based)
Captured Architectures
(Robotic Arm Based)

CONOPS Implementation
IAC-14- D1-4.1x23285 19 of 20 1-October-2014
1
4
3 2
5 6
1
4
3 2
5 6
1
4
3 2
5 6
Architecture 1: “Beehive”
Integrated, Distributed, Prox Ops
Architecture 3: “Integrated Tug”
Integrated, Centralized, Prox Ops
Architecture 7: “External Tug”
External, Centralized, Prox Ops

QUESTIONS?
IAC-14- D1-4.1x23285 20 of 20 1-October-2014

BACKUPS
IAC-14- D1-4.1x23285 21 of 20 1-October-2014

Architecture Literature Review (1/2)
Architecture Author (Year) Concept
1 - “Beehive”
Integrated
Distributed
Prox Ops
Gralla, de Weck (2007)
Toglia (2011)
Barnhart (2012)
Self-assembly through module rendezvous and docking; MIT
Cooperative control of docked, modular, robotic spacecraft; MIT
Changing satellite morphology through cellularization; DARPA
2 - “Integrated Crew”
Integrated
Distributed
Captured
Ukegawa (2003) Control of modular, hinged, hexagon modules; Japan
3 - “Integrated Tug”
Integrated
Centralized
Prox Ops
Rodgers (2005) On-orbit assembly of segmented telescope using single EMFF tug
4 - “Spider”
Internal
Centralized
Captured
Lillie (2006) OTV w/ one arm on the s/c bus manipulates, resupply and servicing
at the ISS; Northrop-Grumman
IAC-14- D1-4.1x23285 22 of 20 1-October-2014

Architecture Literature Review (2/2)
Architecture Author (Year) Concept
5 - “Carrier”
External
Distributed
Prox Ops
Stroupe (2005)
Gralla, de Weck (2007)
Barnhart (2012)
Robotic Construction Crew, terrestrial; JPL
Multiple tugs perform individual tasks; MIT
Changing satellite morphology through cellularization; DARPA
6 - “External Crew”
External
Distributed
Captured
7 - “External Tug”
External
Centralized
Prox Ops
Backes (1990)
Colombina (1994)
etc.
Kawano (1999)
Rumford (2003)
Galabova (2003)
Gralla, de Weck (2007)
Rembala (2009)
Prox ops with robotic arms, control; JPL
Prox ops with robotic arms, control; Italy
…
ETS-VII mission for robotic prox ops; Japan
DART project, proximity operations technology; Orbital
Space-tug design; MIT
Single tug performs everything and can be refueled; MIT
Future robotic assembly based on ISS experience; MDA
8 - “Shuttle”
External
Centralized
Captured
Lillie (2006)
Rembala (2009)
Akin (2002)
Dornehim (2006)
Zimpfer (2007)
OTV w/ one arm docks, manipulates, resupplies, retrieval and
servicing at the ISS; Northrop-Grumman
Future robotic assembly based on ISS experience; MDA
Hybrid free-flying teleoperator concept; Maryland
Orbital Express mission; DARPA
Shuttle operations description among others; Draper
IAC-14- D1-4.1x23285 23 of 20 1-October-2014

Architecture Literature Review
• Human vs. robotic assembly
• Erickson (1991), Stephens (2002), Purves (2002), Muller (2002), Akin
(2002)
• Robotic assembly architectures - Gralla & de Weck (2007)
• Self-assembly or passive, single-use or reusable, refuelable or not
• Based on mass & ΔV, a refuelable, reusable single tug is dominant
• Intelligent building blocks concept - Weise (2012)
• Metrics for assembly techniques - Stephens (2002)
• ISS assembly and servicing
• Brand (1990), Covault (1997), Goetz (2003)
• MIT Theses
• Rodgers SM (2005) – Tech. development for on-orbit assembly, UDP
• Baldesarra SM (2007) – Space telescope on-orbit servicing
• Mohan PhD (2010) – On-orbit assembly using SPHERES
IAC-14- D1-4.1x23285 24 of 20 1-October-2014

Architecture Works Cited (1/2) Akin, D.L., M.L. Bowden, “EVA, robotic, and cooperative assembly of large space structures”, 2002 IEEE Aerospace
Conference Proceedings, 7, Big Sky, Montana, March 2002.
Backes, P.G., K.S. Tso, "Autonomous single arm ORU changeout strategies, control issues, and implementation”, North-
Holland Robotics and Autonomous Systems, 1990.
Baldesarra, M. “A Decision-Making Framework to Determine the Value of On-Orbit Servicing Compared to Replacement
of Space Telescopes.” S.M. Thesis, Department Of Aeronautics and Astronautics, Massachusetts Institute of
Technology, Cambridge, MA, 2007.
Barnhart, D. Hill, L., Turnbull, M., & Will, P. “Changing Satellite Morphology through Cellularization”, AIAA 2012
Conference and Exposition. Pasadena, CA, September 2012.
Brand, V., “The Challenge of Assembling a Space Station in Orbit,” AGARD, Space Vehicle Flight Mechanics, 8, 1990.
Colombina, G.; Didot, F.; Magnani, G.; Rusconi, A., "Automation and robotics technology testbed for external servicing,"
Intelligent Robots and Systems '94. 'Advanced Robotic Systems and the Real World', IROS '94. Proceedings of the
IEEE/RSJ/GI International Conference on , vol.3, no., pp.1954,1963 vol.3, 12-16 Sep 1994
Covault, C., “Station Faces Difficult Assembly in Orbit”, Aviation Week & Space Technology, 147, p.47, 8 December 1997.
Dornheim, M.A., “Orbital Express to Test Full Autonomy for On-Orbit Service”, Aviation Week & Space Technology, 4
Jun 2006.
Erickson, J.D., Charles R.P., and Cooke, D. "Future needs for space robots for SEI", Proc. SPIE 1612, Cooperative
Intelligent Robotics in Space II, 2, March 1, 1992.
Galabova, K., G. Bounova, O. de Weck, and D. Hastings, “Architecting a Family of Space Tugs Based on Orbital Transfer
Mission Scenarios”, AIAA 2003-6368. AIAA Space 2003 Conference, Long Beach, CA, 23- 25 September 2003.
Goetz, T., T. Dark-Fox, and J. Mayer, “Building the International Space Station: Some Assembly Required”, AIAA-2005-
2599, AIAA/ICAS International Air and Space Symposium and Exposition: The Next 100 Year, Dayton, Ohio, July
2003.
Gralla, E., and De Weck, O., “Strategies for On-Orbit Assembly of Modular Spacecraft”. JBIS, Vol 60, 2007. pp. 219-227.
Kawano, I., M. Mokuno, T. Kasai, and T. Suzuki, “Result and Evaluation of Autonomous Rendezvous Docking
Experiments of ETS-VII”, AIAA- 99-4073, AIAA Guidance, Navigation, and Control Conference, Portland, Oregon,
August 1999.
IAC-14- D1-4.1x23285 25 of 20 1-October-2014

Architecture Works Cited (2/2) Lillie, C.F. "On-orbit assembly and servicing of future space observatories", Proc. SPIE 6265, Space Telescopes and
Instrumentation I: Optical, Infrared, and Millimeter, 62652D, June 14, 2006.
Mohan, Swati. “Quantitative Selection and Design of Model Generation Architectures for On- Orbit Autonomous
Assembly.” PhD Thesis. Massachusetts Institute of Technology. 2010.
Muller, R.M., “Assembly and servicing of a large telescope at the International Space Station”, 2002 IEEE Aerospace
Conference Proceedings, 7, Big Sky, Montana, March 2002.
Purves, L.R., “A method for estimating costs and benefits of space assembly and servicing by astronauts and robots”,
2002 IEEE Aerospace Conference Proceedings, 7, Big Sky, Montana, March 2002.
Rembala, Richard, Cameron Ower, Robotic assembly and maintenance of future space stations based on the ISS
mission operations experience, Acta Astronautica, Volume 65, Issues 7–8, pp. 912-920, Oct-Nov 2009
Rodgers, et al. “Concepts and Technology Development for the Autonomous Assembly and Reconfiguration of Modular
Space Systems.” MIT, Space Systems Laboratory #14-05, December 2005.
Rumford, T., “Demonstration of Autonomous Rendezvous Technology (DART) Project Summary”, in Space Systems
Technology and Operations, ed. P. Tchoryk, Jr., and J. Shoemaker, Proceedings of SPIE Vol. 5088, 2003.
Stephens, S.K.; Willenberg, H.J., "Metrics for in-space telescope assembly techniques," Aerospace Conference, 2003.
Proceedings. 2003 IEEE , vol.8, no., pp.8_3967,8_3977, March 8-15, 2003
Stroupe, T. Huntsberger, B. Kennedy, H. Aghazarian, E. Baumgartner, A. Ganino, M. Garrett, A. Okon, M. Robinson,
and J. Townsend, "Heterogeneous Robotic Systems for Assembly and Servicing," Proceedings of ISAIRAS 2005.
Toglia, C., F. Kennedy, S. Dubowsky, ’Cooperative Control of Modular Space Robots,' Autonomous Robots, In Press,
DOI: 10.1007/s10514-011-9238-z. 2011.
Ukegawa, K., Natori, M.C., “Concept of self-assembly of space structure systems using autonomous modules,” 54th
International Astronautical Congress of the International Astronautical Federation, 29 September - 3 October 2003,
Bremen, Germany, IAC-03-U.1.01 (2003).
Weise, J. K. Briess, A. Adomeit, Reimerdes, H-G, Goeller, M, Dillman, R. “An Intelligent Building Blocks Concept for
On-Orbit-Satellite Servicing.” Turin, Italy, Sept 4-6, 2012.
Zimpfer, D., P. Kachmar, and S. Tuohy, “Autonomous Rendezvous, Capture, and In-Space Assembly: Past, Present,
and Future”, AIAA- 2005-2523, 1st AIAA Space Exploration Conference: Continuing the Voyage of Discovery,
Orlando, Florida, January/February 2005.
IAC-14- D1-4.1x23285 26 of 20 1-October-2014