DeepLearningProgramming Lecture4:Deepneuralnetworks · 24/29 07.05.2018...
29
Lecture 4: Deep neural networks Deep Learning Programming Dr. Hanhe Lin Universität Konstanz, 07.05.2018
Transcript of DeepLearningProgramming Lecture4:Deepneuralnetworks · 24/29 07.05.2018...

Lecture 4: Deep neural networksDeep Learning Programming
Dr. Hanhe LinUniversität Konstanz, 07.05.2018

Note
- Submit your group lists by the end of this week, up to 5 in each group- I will attend a conference between 28.05 and 01.06, so the course will be changed to
23.05 exercise session
2 / 29 07.05.2018 Deep Learning Programming - Lecture 4 Dr. Hanhe Lin
1 Forward and backward propagation - 1.1 A 3-layer neural networks
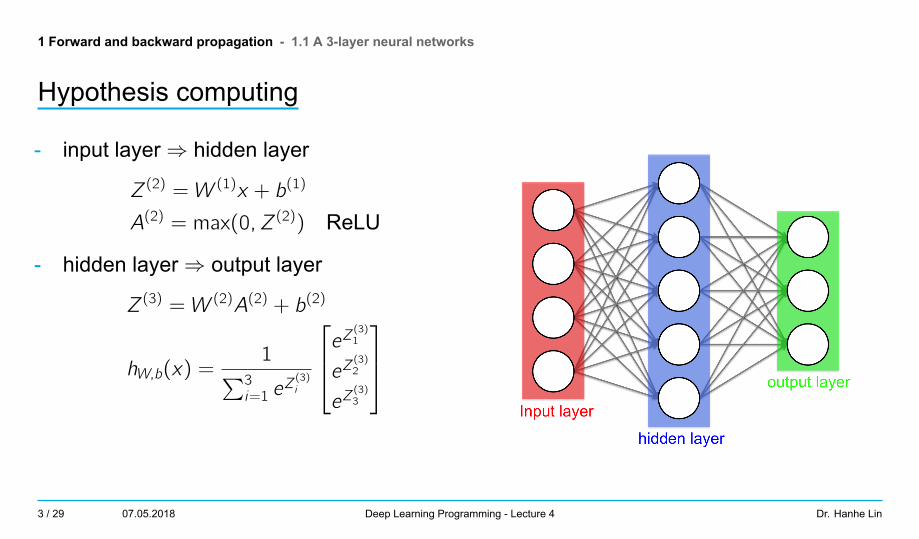
Hypothesis computing
- input layer⇒ hidden layer
Z(2) = W (1)x + b(1)
A(2) = max(0, Z(2)) ReLU
- hidden layer⇒ output layer
Z(3) = W (2)A(2) + b(2)
hW,b(x) =1∑3
i=1 eZ(3)i
eZ(3)1
eZ(3)2
eZ(3)3
3 / 29 07.05.2018 Deep Learning Programming - Lecture 4 Dr. Hanhe Lin

1 Forward and backward propagation - 1.1 A 3-layer neural networks
Loss function
-
J(W, b) =−1
m
m∑i=1
3∑k=1
(1{y (i) = k}loghW,b(x (i))
)+λ
2
2∑l=1
||W (l)||2
4 / 29 07.05.2018 Deep Learning Programming - Lecture 4 Dr. Hanhe Lin

1 Forward and backward propagation - 1.1 A 3-layer neural networks
Partial derivative
- output layer⇒ hidden layer
∆(3) = −(1{y (i) = k} −
eZ(3)∑3
i=1 eZ(3)i
)∂
∂W (2)J(W, b) = ∆(3)A(2) + λW (2)
∂
∂b(2)J(W, b) = ∆(3)
- hidden layer⇒ input layer
∆(2) = ∆(3)W (2)f ′(Z(2))
f ′(Z(2)) =
{1 if Z(2)i > 00 else
∂
∂W (1)J(W, b) = ∆(2)x + λW (1)
∂
∂b(1)J(W, b) = ∆(2)
5 / 29 07.05.2018 Deep Learning Programming - Lecture 4 Dr. Hanhe Lin

1 Forward and backward propagation - 1.2 A 4-layer neural networks
Hypothesis computing
- Let A(1) = x
Z(2) = W (1)A(1) + b(1)
A(2) = f (Z(2))
Z(3) = W (2)A(2) + b(2)
A(3) = f (Z(3))
Z(4) = W (3)A(3) + b(3)
hW,b(x)︸ ︷︷ ︸A(4)
=1∑3
i=1 eZ(4)i
eZ(4)1
eZ(4)2
eZ(4)3
︸ ︷︷ ︸
f (Z(4))
6 / 29 07.05.2018 Deep Learning Programming - Lecture 4 Dr. Hanhe Lin
1 Forward and backward propagation - 1.2 A 4-layer neural networks
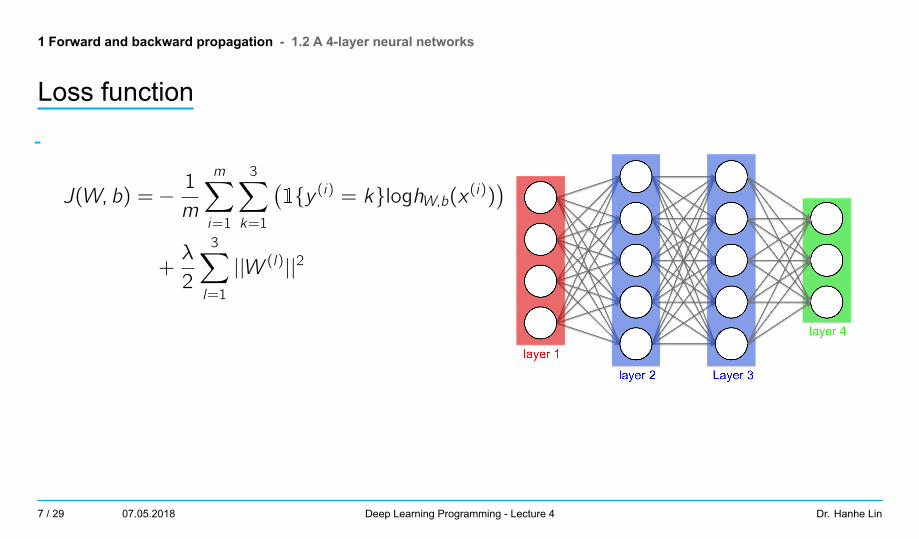
Loss function
-
J(W, b) =−1
m
m∑i=1
3∑k=1
(1{y (i) = k}loghW,b(x (i))
)+λ
2
3∑l=1
||W (l)||2
7 / 29 07.05.2018 Deep Learning Programming - Lecture 4 Dr. Hanhe Lin
1 Forward and backward propagation - 1.2 A 4-layer neural networks
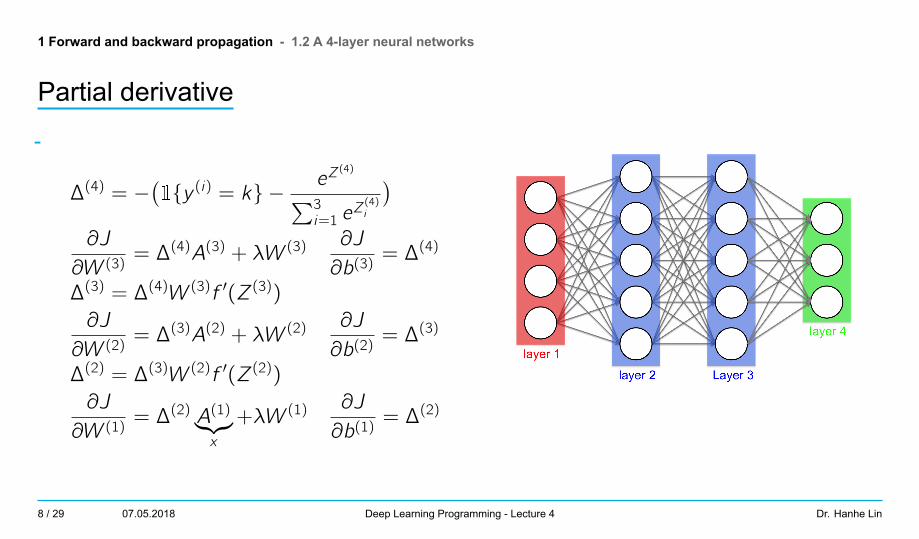
Partial derivative
-
∆(4) = −(1{y (i) = k} −
eZ(4)∑3
i=1 eZ(4)i
)∂J
∂W (3)= ∆(4)A(3) + λW (3)
∂J
∂b(3)= ∆(4)
∆(3) = ∆(4)W (3)f ′(Z(3))
∂J
∂W (2)= ∆(3)A(2) + λW (2)
∂J
∂b(2)= ∆(3)
∆(2) = ∆(3)W (2)f ′(Z(2))
∂J
∂W (1)= ∆(2) A(1)︸︷︷︸
x
+λW (1)∂J
∂b(1)= ∆(2)
8 / 29 07.05.2018 Deep Learning Programming - Lecture 4 Dr. Hanhe Lin

1 Forward and backward propagation - 1.3 Forward propagation
Forward propagation
- From layer l to layer l + 1, the activation is computed as:
Z(l+1) = W (l)A(l) + b(l)
A(l+1) = f (Z(l+1))
- When l = 1, A(1) = x- When l is equal to the number of layers L, f(x) is the cost function of linear model, e.g.,
softmax in previous example
9 / 29 07.05.2018 Deep Learning Programming - Lecture 4 Dr. Hanhe Lin
1 Forward and backward propagation - 1.4 Backward propagation
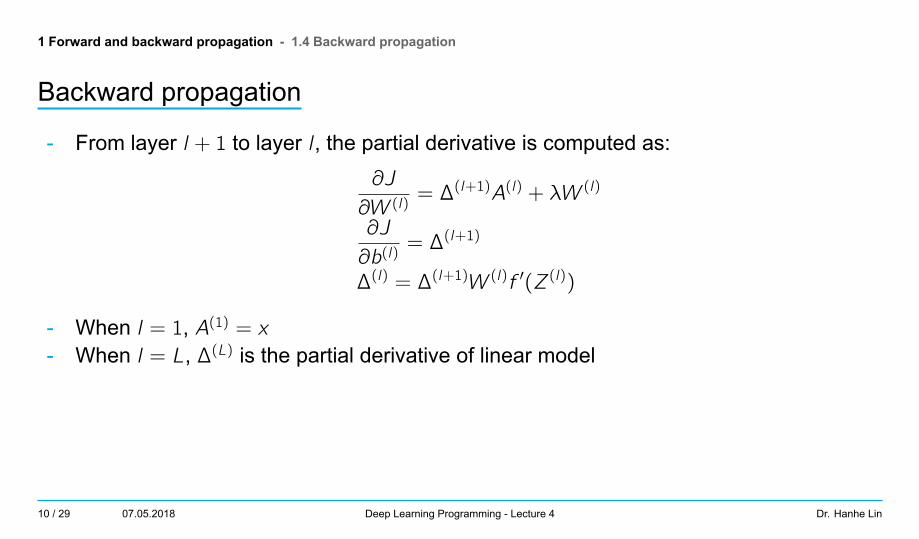
Backward propagation
- From layer l + 1 to layer l , the partial derivative is computed as:∂J
∂W (l)= ∆(l+1)A(l) + λW (l)
∂J
∂b(l)= ∆(l+1)
∆(l) = ∆(l+1)W (l)f ′(Z(l))
- When l = 1, A(1) = x- When l = L, ∆(L) is the partial derivative of linear model
10 / 29 07.05.2018 Deep Learning Programming - Lecture 4 Dr. Hanhe Lin
2 Build a L-layer neural networks - 2.1 Training, validation, and test sets
Hyperparameter tuning
- To build a neural network, one must tune a lot of parameters. For example, number oflayers, learning rate of SGD, number of units in each hidden layers, regularizationparameter, ...
- Two options to find optimal parameters:- a separate validation set when you have a large dataset- k-fold cross validation when you have a small dataset
- Q: why cannot use the test set for the purpose of tweaking hyperparameters?
11 / 29 07.05.2018 Deep Learning Programming - Lecture 4 Dr. Hanhe Lin

2 Build a L-layer neural networks - 2.1 Training, validation, and test sets
A separate validation set
- Split dataset into three non-overlapping sets, i.e., training set, validation set, and testset. For example, in our assignment, we have 49,000 training data, 1,000 validationdata, and 1,000 test data
- Train your model with training set, and measure the performance on validation set withdifferent parameters, choose the optimal parameters. Namely, the parameters thathas the best performance on validation set
- Measure the performance of your model on test set with the optimal parameter- Pros and cons:
- More bias- Less computational time
12 / 29 07.05.2018 Deep Learning Programming - Lecture 4 Dr. Hanhe Lin

2 Build a L-layer neural networks - 2.1 Training, validation, and test sets
k-fold Cross Validation (CV)
- Split training set into k equal sizedsubsets
- A single subset is retained as thevalidation data for testing the model, andthe remaining k − 1 subsets are used astraining data
- Repeat training process k times (thefolds), with each of the k subsets usedexactly once as the validation data.
- The k results from the folds can then beaveraged to produce a single estimation
- Pros and cons:- Less bias- More computational time
13 / 29 07.05.2018 Deep Learning Programming - Lecture 4 Dr. Hanhe Lin

2 Build a L-layer neural networks - 2.1 Training, validation, and test sets
Grid search for hyperparameter tuning
- Suppose we have two hyperparameters to tune, learning rate α and regularizationterm λ, to find the optimal hyperparameters, we
- pick a bunch of values of α- pick a bunch of values of λ- For each pair of α and λ, evaluate the validation error, either K-fold CV on
training set or on validation set- Pick the pair that gives the minimum value of the validation error
- Coarse-to-fine strategy
14 / 29 07.05.2018 Deep Learning Programming - Lecture 4 Dr. Hanhe Lin

2 Build a L-layer neural networks - 2.2 Data preprocessing
Motivation
- Each feature has a different scale, whichmay generate an oval shape
- Result: more iterations to converge- Four forms:
- mean subtraction- normalization- PCA- Whitening
15 / 29 07.05.2018 Deep Learning Programming - Lecture 4 Dr. Hanhe Lin

2 Build a L-layer neural networks - 2.2 Data preprocessing
Mean subtraction and normalization
- Mean subtraction:- most common form of preprocessing- subtract the mean across every individual feature in the data
- Normalization:- normalize the data dimensions so that they are of approximately the same scale- divide each dimension by its standard deviation after mean subtraction
16 / 29 07.05.2018 Deep Learning Programming - Lecture 4 Dr. Hanhe Lin

2 Build a L-layer neural networks - 2.2 Data preprocessing
PCA
- Principal Component Analysis (PCA) uses orthogonal transformation to convert a setof data of possibly correlated features into a set of values of linearly uncorrelatedfeatures called principal components
- Procedure:- mean subtraction- compute the covariance matrix, which is symmetric and positive semi-definite
with a size of n × n- compute the eigenvectors and eigenvalues of the covariance matrix- project the original (but zero-centered) data into the eigenbasis, namely,
zero-centered data multiply the eigenvectors of the covariance matrix- We could only keep the top k dimensions of the data, e.g., 100, that contain the most
variance so that saving space and time
17 / 29 07.05.2018 Deep Learning Programming - Lecture 4 Dr. Hanhe Lin

2 Build a L-layer neural networks - 2.2 Data preprocessing
Whitening
- After computing de-correlated data, the whitening operation divides every dimensionby the eigenvalue to normalize the scale
- Whitened data will be a Gaussian with zero mean and identity covariance matrix
18 / 29 07.05.2018 Deep Learning Programming - Lecture 4 Dr. Hanhe Lin

2 Build a L-layer neural networks - 2.2 Data preprocessing
Example: MNIST dataset
Figure: Original data Figure: PCA (300/784 dimensions) Figure: Whitening
19 / 29 07.05.2018 Deep Learning Programming - Lecture 4 Dr. Hanhe Lin

2 Build a L-layer neural networks - 2.2 Data preprocessing
Tips
- Data preprocessing should only be computed to training set exclusively, and thenapplied to validation/test data.
- Example: given a training set, compute the data mean, eigenvectors and eigenvaluesof covariance matrix, and keep them for further use. . .
- Data preprocessing is commonly used in traditional machine learning approaches.However, in Convolutional Networks, what we need to do is just to scale the pixelvalue from [0 255] to [0 1], namely, divide by 255
20 / 29 07.05.2018 Deep Learning Programming - Lecture 4 Dr. Hanhe Lin

2 Build a L-layer neural networks - 2.3 Weight and bias initialization
Weight and initialization
- Set all initial weights to zero⇒ same output⇒ same gradient⇒ same parametersupdate
- Initialize weights randomly to serve the purpose of symmetry breaking- Solutions:
- Random initialization with small numbers- Calibrate the variances with 1/
√n, where n is the number of inputs of each
neuron- Sparse initialization- He initialization, i.e., random initialization multiply
√2
dimension of the previous layer
- Bias initialization: zero initialization- My suggestion: random initialization is enough
21 / 29 07.05.2018 Deep Learning Programming - Lecture 4 Dr. Hanhe Lin
2 Build a L-layer neural networks - 2.4 Gradient check
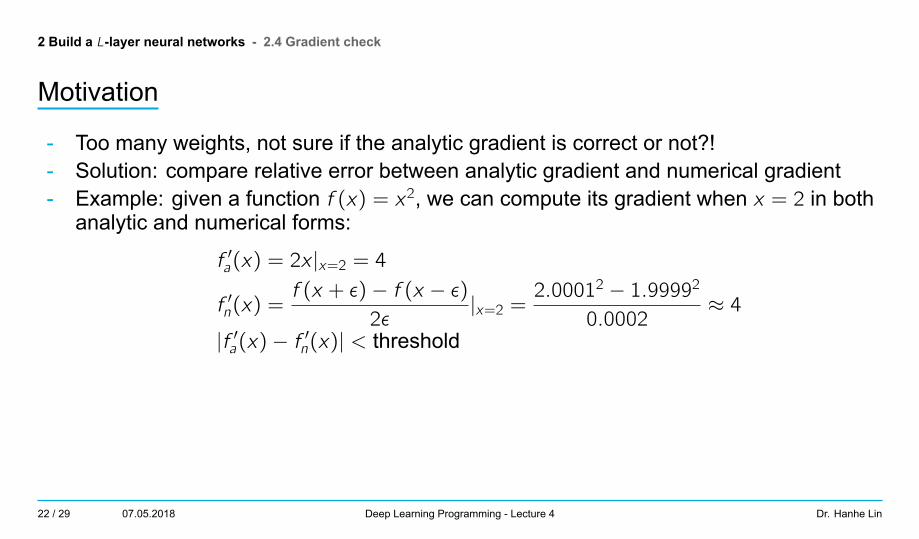
Motivation
- Too many weights, not sure if the analytic gradient is correct or not?!- Solution: compare relative error between analytic gradient and numerical gradient- Example: given a function f (x) = x2, we can compute its gradient when x = 2 in both
analytic and numerical forms:
f ′a(x) = 2x |x=2 = 4
f ′n(x) =f (x + ϵ)− f (x − ϵ)
2ϵ|x=2 =
2.00012 − 1.99992
0.0002≈ 4
|f ′a(x)− f ′n(x)| < threshold
22 / 29 07.05.2018 Deep Learning Programming - Lecture 4 Dr. Hanhe Lin

2 Build a L-layer neural networks - 2.4 Gradient check
Gradient check on cost function
- Suppose we have a cost function J(θ) with a set of parameters θ = [θ1, θ2, . . . , θn], let ϵis a very small number, say 10−4, a correct analytic gradient should meet:
∂J
∂θ1≈J(θ1 + ϵ, θ2, . . . , θn)− J(θ1 − ϵ, θ2, . . . , θn)
2ϵ∂J
∂θ2≈J(θ1, θ2 + ϵ, . . . , θn)− J(θ1, θ2 − ϵ, . . . , θn)
2ϵ...
∂J
∂θn≈J(θ1, θ2, . . . , θn + ϵ)− J(θ1, θ2, . . . , θn − ϵ)
2ϵ
23 / 29 07.05.2018 Deep Learning Programming - Lecture 4 Dr. Hanhe Lin

2 Build a L-layer neural networks - 2.4 Gradient check
Tip
- Compute analytic gradient f ′a- Estimate numerical gradient f ′n- Make sure they have a small relative error, say 1e − 7
relative error =|f ′a − f ′n|
max(|f ′a |, |f ′n|)
- Q: why not just use |f ′a − f ′n|?- Gradient check can be generalized to check gradient of any cost function
24 / 29 07.05.2018 Deep Learning Programming - Lecture 4 Dr. Hanhe Lin

2 Build a L-layer neural networks - 2.5 Train a neural network model
- Split dataset into training set, validation set, and test set- Design a network architecture according to your application- Train multiple models with different hyperparameters and find the optimal
hyperparameters by validation set:- Randomly initialize weights and biases- Repeat:
- Randomly select a subset of training data, i.e., mini-batch- Forward propagation to compute hypothesis hW,b(x)- Compute cost function J(W, b)- Back propagation to compute partial derivative of weights ∂J
∂W and biases∂J∂b
- Update weights and biases- Train a final model with the optimal hyperparameters and evaluate performance on
test set
25 / 29 07.05.2018 Deep Learning Programming - Lecture 4 Dr. Hanhe Lin

3 Deep feedforward neural networks
An example: face recognition
26 / 29 07.05.2018 Deep Learning Programming - Lecture 4 Dr. Hanhe Lin
3 Deep feedforward neural networks
Pros and cons
- Pros:- Learn feature and task model simultaneously- Better performance, but not that much
- Cons:- Computational intensive- Non-convex- Prone to overfitting- “Black box” model
27 / 29 07.05.2018 Deep Learning Programming - Lecture 4 Dr. Hanhe Lin

3 Deep feedforward neural networks
Universal approximation properties
- Given enough hidden units, feedforward neural networks with one hidden layer canapproximate any continuous function. However, it
- may not be able to find the right parameters- may find the wrong function as a result of overfitting
- The representational power of feedforward neural network with one hidden layer is thesame as those with multiple hidden layers
- In practice, feedforward neural networks with two hidden layers outperform those withone hidden layer. However, more hidden layers don’t improve that much
28 / 29 07.05.2018 Deep Learning Programming - Lecture 4 Dr. Hanhe Lin

3 Deep feedforward neural networks
Summary
- We extended 3-layer feedforward neural networks to multiple layer feedforward neuralnetworks with forward and backward propagation
- We introduced two ways to tune hyperparameters. If you have a large dataset, it isbetter to split dataset into training, validation, and test sets, whereas if you have asmall dataset, it is better to apply k-fold cross validation
- Data preprocessing is able to make learning faster. However, PCA/Whitening are notused in convolutional neural networks
- Random initialize weights for the purpose of symmetry breaking- Gradient check is very useful when you implement your own cost function
29 / 29 07.05.2018 Deep Learning Programming - Lecture 4 Dr. Hanhe Lin