DC Motor Hız Kontrolü için Model Referans...
7
Şekil 1: Deney düzeneği DC Motor Hız Kontrolü için Model Referans Uyarlamalı PID Denetleyici Tasarımı Yasin Yeniaydın, Burak Sakacı, Tuğçe Yaren, Volkan Süel, Selçuk Kizir Mekatronik Mühendisliği Bölümü Kocaeli Üniversitesi, İzmit/KOCAELİ {ysnynydn, buraksakaci, tuceyaren, v.suel.mekatronik}@gmail.com, [email protected] Özetçe Bu çalışmada STM32F4 uygulama geliştirme kiti ve Matlab destekli Waijung blok seti kullanılarak, uyarlamalı kontrol yöntemlerinden biri olan Model Referans Uyarlamalı PID Denetleyicisi (MRUPIDD) tasarımı, tasarlanan bu denetleyicinin DC motor üzerinde hız kontrolü uygulaması ve sonuçlarının karşılaştırılması sunulmaktadır. Hatayı minimize edecek şekilde kontrol parametrelerini ayarlayan ayarlama mekanizması için MIT kuralı kullanılmıştır. Sistemin takip etmesi istenen referans modeli için 2. dereceden bir sistem, doğal frekans ve sönümleme oranı dikkate alınarak oluşturulmuştur. 1. Giriş Sistemin dinamik yapısının değişmesi, çevresel durumlar ve bozucu etkiler sistem kontrolünü zorlaştırmaktadır ve geleneksel geri beslemeli kontrol yöntemleri, bu gibi durumlarda istenilen kontrol için yetersiz performans sergilemektedir [1]. Uyarlamalı kontrol, parametreleri değişen veya başlangıçta belli olmayan sistemleri kontrol etmek için kullanılan bir kontrol yöntemidir. Örneğin, bir hava aracı uçtukça yakıt tüketimine bağlı olarak kütlesi yavaşça azalacaktır. Bu durumda, bu tür değişen durumlara karşı adapte olabilecek bir kontrol yöntemi gereklidir [2]. Bu kontrol yönteminin sahip olacağı özellikleri uyarlamalı kontrol yöntemi karşılamaktadır. Uyarlamalı kontrol yöntemi trafik ışıklarından, hava araçlarına ve otomobillere kadar birçok kullanım yerine sahiptir. Çok fazla sayıda uyarlamalı kontrol tekniği vardır. Bunlardan biri Model Referans Uyarlamalı Kontrol (MRUK) tekniğidir. MRUK ilk olarak, oto pilot kontrol problemini çözmek için önerilmiştir [3]. Bu kontrol tekniğinde bulunan elemanlardan biri referans modelidir. İstenilen çıkış referans modeli olarak adlandırılan transfer fonksiyonu tarafından üretilir. Kontrolün sağlanması için gerekli olan kontrol parametreleri ayarlama mekanizmasında oluşturulur. Yukarıda ele alınan durumlarda uyarlamalı kontrol yönteminin iyi sonuç vermesinden dolayı, bu kontrol yöntemine olan ilgi son yıllarda artmıştır. Sar ve Dewan [3], yaptıkları çalışmada DC motor hız kontrolü için model referans uyarlamalı PI denetleyicisi tasarlamışlar ve LabVIEW programında simülasyon yaparak sonuçları elde etmişlerdir. Ali ve arkadaşları [4], DC Motor hız kontrolü için MRUPIDD tasarlamışlar ve sonuçları MATLAB-SIMULINK ortamında elde etmişlerdir. Bu çalışmada, sabit mıknatıslı bir DC motorun hız kontrolüne yönelik MRUK tabanlı PID denetleyicisi tasarlanarak uygulanmıştır. MRUPIDD, Matlab destekli Waijung blok seti ve STM32F4 uygulama geliştirme kiti yardımı ile tasarlanıp, uygulanmıştır. STM32F4 uygulama geliştirme kitinin seçilmesinin nedenleri arasında, kitin kolay öğrenilebilmesi, düşük maliyetli oluşu ve 32 bitlik işlemciye sahip olmasından dolayı 8 bitlik işlemcilere göre daha hızlı olması gibi özellikleri başta gelmektedir. Kitin içerisinde bulunan ARM işlemci, Waijung blok setinde bulunan bloklar ve Matlab yardımı ile programlanmaktadır. Uyarlamalı ve Sabit Mıknatıslı DC Servo Motor Motor Sürücüsü STM32F4 Uygulama Geliştirme Kiti USB-UART Dönüştürücü 313
Transcript of DC Motor Hız Kontrolü için Model Referans...

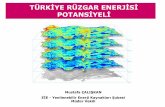
Şekil 1: Deney düzeneği
DC Motor Hız Kontrolü için Model Referans Uyarlamalı PID
Denetleyici Tasarımı
Yasin Yeniaydın, Burak Sakacı, Tuğçe Yaren, Volkan Süel, Selçuk Kizir
Mekatronik Mühendisliği Bölümü
Kocaeli Üniversitesi, İzmit/KOCAELİ
{ysnynydn, buraksakaci, tuceyaren, v.suel.mekatronik}@gmail.com,
Özetçe
Bu çalışmada STM32F4 uygulama geliştirme kiti ve Matlab
destekli Waijung blok seti kullanılarak, uyarlamalı kontrol
yöntemlerinden biri olan Model Referans Uyarlamalı PID
Denetleyicisi (MRUPIDD) tasarımı, tasarlanan bu
denetleyicinin DC motor üzerinde hız kontrolü uygulaması ve
sonuçlarının karşılaştırılması sunulmaktadır. Hatayı minimize
edecek şekilde kontrol parametrelerini ayarlayan ayarlama
mekanizması için MIT kuralı kullanılmıştır. Sistemin takip
etmesi istenen referans modeli için 2. dereceden bir sistem,
doğal frekans ve sönümleme oranı dikkate alınarak
oluşturulmuştur.
1. Giriş
Sistemin dinamik yapısının değişmesi, çevresel durumlar ve
bozucu etkiler sistem kontrolünü zorlaştırmaktadır ve
geleneksel geri beslemeli kontrol yöntemleri, bu gibi
durumlarda istenilen kontrol için yetersiz performans
sergilemektedir [1]. Uyarlamalı kontrol, parametreleri değişen
veya başlangıçta belli olmayan sistemleri kontrol etmek için
kullanılan bir kontrol yöntemidir. Örneğin, bir hava aracı
uçtukça yakıt tüketimine bağlı olarak kütlesi yavaşça
azalacaktır. Bu durumda, bu tür değişen durumlara karşı
adapte olabilecek bir kontrol yöntemi gereklidir [2]. Bu
kontrol yönteminin sahip olacağı özellikleri uyarlamalı kontrol
yöntemi karşılamaktadır. Uyarlamalı kontrol yöntemi trafik
ışıklarından, hava araçlarına ve otomobillere kadar birçok
kullanım yerine sahiptir.
Çok fazla sayıda uyarlamalı kontrol tekniği vardır.
Bunlardan biri Model Referans Uyarlamalı Kontrol (MRUK)
tekniğidir. MRUK ilk olarak, oto pilot kontrol problemini
çözmek için önerilmiştir [3]. Bu kontrol tekniğinde bulunan
elemanlardan biri referans modelidir. İstenilen çıkış referans
modeli olarak adlandırılan transfer fonksiyonu tarafından
üretilir. Kontrolün sağlanması için gerekli olan kontrol
parametreleri ayarlama mekanizmasında oluşturulur.
Yukarıda ele alınan durumlarda uyarlamalı kontrol
yönteminin iyi sonuç vermesinden dolayı, bu kontrol
yöntemine olan ilgi son yıllarda artmıştır. Sar ve Dewan [3],
yaptıkları çalışmada DC motor hız kontrolü için model
referans uyarlamalı PI denetleyicisi tasarlamışlar ve LabVIEW
programında simülasyon yaparak sonuçları elde etmişlerdir.
Ali ve arkadaşları [4], DC Motor hız kontrolü için MRUPIDD
tasarlamışlar ve sonuçları MATLAB-SIMULINK ortamında
elde etmişlerdir.
Bu çalışmada, sabit mıknatıslı bir DC motorun hız
kontrolüne yönelik MRUK tabanlı PID denetleyicisi
tasarlanarak uygulanmıştır. MRUPIDD, Matlab destekli
Waijung blok seti ve STM32F4 uygulama geliştirme kiti
yardımı ile tasarlanıp, uygulanmıştır. STM32F4 uygulama
geliştirme kitinin seçilmesinin nedenleri arasında, kitin kolay
öğrenilebilmesi, düşük maliyetli oluşu ve 32 bitlik işlemciye
sahip olmasından dolayı 8 bitlik işlemcilere göre daha hızlı
olması gibi özellikleri başta gelmektedir. Kitin içerisinde
bulunan ARM işlemci, Waijung blok setinde bulunan bloklar
ve Matlab yardımı ile programlanmaktadır. Uyarlamalı ve
Sabit Mıknatıslı
DC Servo Motor
Motor
Sürücüsü
STM32F4 Uygulama
Geliştirme Kiti
USB-UART
Dönüştürücü
313
Mavi
Typewritten Text
TOK 2014 Bildiri Kitabı 11-13 Eylül 2014, Kocaeli

sabit katsayılı PID denetleyici tasarımı dışında Waijung blok
seti kullanılarak, bulanık mantık, faz ilerlemeli, faz gerilemeli,
kayma kipli kontrol, kesir dereceli kontrol, durum geri
beslemeli kontrol yöntemleri vb. ile denetleyici tasarımı
rahatlıkla yapılabilir.
Bu çalışmada hız kontrol uygulaması için DC motor tercih
edilmiştir. DC motorlar robotik uygulamalarında ve
endüstriyel alanlarda sıklıkla kullanılmaktadır. Ucuz ve
küçüktürler. Herhangi bir sistemde direk ya da dişli kutularıyla
birlikte (redüktörlü ya da redüktörsüz) kullanılabilirler. Ayrıca
boyut, şekil ve güç bakımından çok çeşitli olmaları da sık
kullanılmalarının bir diğer sebebidir.
DC motor hız kontrolü, Şekil 1’de görülen deney düzeneği
ile test edilmiş ve sonuçları sunulmuştur. Deney düzeneğinde
1/43 redüktör oranına sahip enkoderli ve sabit mıknatıslı
Faulhaber DC motor, LMD18200 motor sürücüsü, STM32F4
uygulama geliştirme kiti ve seri haberleşme için USB-UART
dönüştürücü kartı bulunmaktadır. Bu makalede, ilk olarak DC
motor modeli açıklanacak ve sonrasında MRUK yönteminden
bahsedilecektir. Ardından, MRUPIDD yönteminde ayarlama
mekanizmasının temel yapısını oluşturacak olan MIT kuralı
açıklanıp, hız kontrolü için MRUPIDD tasarımı yapılacaktır.
Son olarak, tasarlanan denetleyici motor üzerinde test
edilerek, sonuçlar grafikler halinde oluşturulacaktır.
2. DC Motor Modeli
DC motorun matematiksel modellemesinde motorun
elektriksel ve mekaniksel yapısından yararlanılır.
Şekil 2: DC motorun elektriksel ve mekaniksel yapısı [5]
Şekil 2’de DC motor modeli görülmektedir. Bu modelde
kullanılan değişkenlerin ve sabitlerin birimleri e (V), R (ohm), L (Henry), i (Amper), J (kge2), b (Nms), Kt (NmA), Ke (
V/rad/sn), ω (rad/sn) ve T (Nm)’dir. DC motor hız kontrolü
yapabilmek için sistem çıkışını hız olarak verecek bir transfer
fonksiyonu oluşturmak gerekir. Aşağıda gösterildiği gibi elde
edilen denklemler sonucunda sistem girişi Volt, çıkışı rad/sn
olan transfer fonksiyonu oluşturulmuştur.
iKTt
(1)
wKee
(2)
Kt ve Ke birbirine eşit olduğundan dolayı, bunların yerine K parametresi kullanılmıştır.
edt
diLRiV
(3)
Tdt
db
dt
dj
2
2
(4)
Gerilim, zıt emk, moment denklemlerinden sistem transfer
fonksiyonu elde edilir. Motorun hızı ile gerilim arası ilişki
bulunarak transfer fonksiyonu elde edilmiş olur. Elde edilen
transfer fonksiyonu:
2))(()(
)(
KRLsbJs
K
sV
s
(5)
Tablo 1’de hız kontrolünü gerçekleştirdiğimiz DC
motorun parametreleri görülmektedir.
Tablo 1: Kullanılan DC motorun parametreleri
Sembol Tanım Değer
J Rotor Atalet
Momenti 47e-7
B Viskoz Sönümleme 35e-5
K Elektriksel ve Tork
Sabiti 34.2e-3
R Rotor Direnci 4
L Rotor Endüktansı 630e-6
3. Model Referans Uyarlamalı Kontrol
MRUK, uyarlamalı kontrol yöntemlerinden biridir. Sistem
parametreleri ve bozucu etkiler, sistemin dinamik
davranışından daha yavaş değişirse MRUK, sistem kontrolü
için kullanılabilir [4]. Bu denetleyicide amaç arzu edilen
çıkışı, sistemin takip etmesidir. Oluşturulan referans modeline
uygulanan giriş sinyali ile arzu edilen çıkış üretilir. Sistemin
istenilen çıkışa oturması için ayarlama mekanizması tasarlanır.
Sistem parametreleri değişirse veya bozucu etkiler gelse bile
ayarlama mekanizması sistem çıkışının, istenilen çıkışı
mükemmel bir şekilde takip etmesini garanti etmelidir [6].
Şekil 4’te MRUK sisteminin blok diyagramı gösterilmektedir.
Şekil 3: MRUK’nın genel yapısı
Şekil 3’te gösterilen sistem iki farklı geri besleme
döngüsüne sahiptir. Bunlardan birincisi, denetleyici ve
sistemden oluşur, aynı zamanda iç döngü olarak bilinir.
İkincisi, denetleyici parametrelerini kontrolü sağlayacak
şekilde değiştiren ayarlama mekanizması, istenilen çıkışı
üreten referans modelinden oluşur ve aynı zamanda dış döngü
olarak bilinir.
MRUK yöntemi temel olarak sistem girişi (ugiriş), denetleyici çıkışı (u), sistem çıkışı (ysistem) ve referans modeli
çıkışı (ymodel) bilgilerine dayanır. MRUK tabanlı denetleyici
tasarımında en önemli sorun ayarlama mekanizmasını
314

oluşturmaktır. MIT kuralı, Lyapunov teorisi, pasiflik teorisi,
vb. birbirinden farklı ayarlama mekanizmaları vardır. Burada,
denetleyici parametrelerini ayarlamak için MIT kuralı
kullanılmıştır [3].
3.1. MIT Kuralı
MIT Kuralı ilk olarak Massachusetts Teknoloji Enstitüsü
(MIT)’nün araştırmacıları tarafından 1960 yılında geliştirilmiş
ve hava araçlarında oto pilot sistemi tasarlamak için
kullanılmıştır. MRUK tabanlı herhangi bir sistemde
denetleyici tasarlamak için MIT kuralı kullanılabilir [1].
MRUK tabanlı sistemlerde takip etme hatası (e), ysistem ile
arzu edilen çıkış olan ymodel arasındaki fark olarak adlandırılır.
e = ysistem - ymodel (6)
Takip etme hatasından sonra denetleyici parametre
vektörünün (Ɵ) bir fonksiyonu olan maliyet fonksiyonu
tanımlanabilir. Maliyet fonksiyonunun seçimi, kontrol
parametrelerinin nasıl güncelleneceğini belirlemektedir [7].
Aşağıda seçilen maliyet fonksiyonu gösterilmektedir.
J(Ɵ) = 2
2
1e (Ɵ) (7)
Ɵ parametresine bağlı olan maliyet fonksiyonunu en aza
indirecek bir denklem gereklidir. Maliyet fonksiyonu
değerinin azalması takip etme hatasının azalarak sistem
çıkışının istenilen çıkışa yaklaşması anlamına gelmektedir.
Bunu sağlayan denklem MIT kuralı olarak adlandırılmakta ve
aşağıda gösterilmektedir. Denklem 8’de bulunan γ sabiti
uyarlama kazancı olarak adlandırılmaktadır.
ee
J
dt
d (8)
MIT kuralı Ɵ’nın zamana göre değişiminin, maliyet
fonksiyonun Ɵ’ya göre değişimine negatif yönde orantısal
olduğunu göstermektedir. MIT kuralı ile birlikte Ɵ zamanla
maliyet fonksiyonunu negatif yönde etkilemekte böylece
maliyet fonksiyonu değeri azalmaktadır. Maliyet fonksiyonu
değerinin azalması takip etme hatasını azaltmaktadır. Takip
etme hatası azaldığında ise sistem çıkışı, arzu edilen çıkışı
mükemmel bir şekilde takip etmektedir.
3.2. MRUPIDD Tasarımı
Denklem 9’da PID denetleyicisi transfer fonksiyonu
verilmiştir.
)(][)( sesKs
KKsU
D
İ
p
(9)
Tablo 1’ de görüldüğü gibi J, B ve L motor parametre
değerlerinin çok küçük olması nedeniyle motor modeli birinci
dereceden varsayılıp, transfer fonksiyonu Denklem 10’da
verilmiştir.
as
b
,
1, a
Kb
M (10)
Sistemin ileri yol transfer fonksiyonu Denklem 11, kapalı
çevrim transfer fonksiyonu Denklem 12’ deki gibidir.
])[( sKs
KK
as
b
D
i
p
(11)
ipD
ipD
cbKsbKasbK
KsKsKb
sU
sY
)()1(
)(
)(
)(
2
2
(12)
Denklem 8’de verilen MIT kuralının KP kontrol parametresine
uygulanması ile aşağıdaki denklem elde edilir.
p
p
p
p
p
K
y
y
e
e
J
K
J
dt
dK
e
J
= e (13)
y
e
= 1)(
y
yym
pK
y
’nin bulunması ile KP kontrol parametresinin zamana
göre değişimi rahatlıkla bulunabilir. Bunun için Denklem 14,
Denklem 12’nin içler dışlar çarpımı sonucu elde edilir.
)]()[(])()1)[((22
ipDCipDKsKsKbsUbKsbKasbKsY (14)
Denklem 14’ün KP’ye göre türevinin uygulanması sonucu
Denklem 15 elde edilir.
ipD
C
pbKsbKasbK
sYsUbs
K
sY
)()1(
))()(()(
2
(15)
Denklem 15’i MIT kuralı ile birleştirdiğimizde KP’nin zamana
göre değişimini ifade eden denklem aşağıdaki gibi bulunur.
))()(()()1(
2sYsU
bKsbKasbK
bse
t
K
C
ipD
p
p
(16)
Denklem 14’ün Kİ’ye göre türevinin uygulanması sonucu
Denklem 17 elde edilir.
ipD
C
ibKsbKasbK
sYsUb
K
sY
)()1(
))()(()(
2
(17)
Denklem 17’yi MIT kuralı ile birleştirdiğimizde Kİ’nin
zamana göre değişimini ifade eden denklem aşağıdaki gibi
bulunur.
))()(()()1(
2sYsU
bKsbKasbK
be
t
K
C
ipD
i
i
(18)
Denklem 14’ün KD’ye göre türevinin uygulanması sonucu
Denklem 19 elde edilir.
315

ipD
C
DbKsbKasbK
sYsUbs
K
sY
)()1(
))()(()(
2
2
(19)
Denklem 19’u MIT kuralı ile birleştirdiğimizde KD’nin
zamana göre değişimini ifade eden denklem aşağıdaki gibi
bulunur.
))()(()()1(
2
2
sYsUbKsbKasbK
bse
t
K
C
ipD
D
D
(20)
4. Gerçek Zamanlı Uygulama
Sistemlerin karakteristik özelliklerinden bazıları, oturma
zamanı, yükselme zamanı ve aşım bilgisidir. İstenilen
karakteristiğe sahip olan ikinci dereceden bir sistemin
matematiksel modelinin transfer fonksiyonu ζ (sönüm oranı)
ve n
(doğal frekans) bilgileri kullanılarak oluşturulabilir.
Denklem 21’de ikinci dereceden bir sistemin ζ ve n
değerlerine bağlı parametrik denklemi verilmiştir. Referans
modeli ikinci dereceden seçilip ζ ve n
değerleri dikkate
alınarak referans modelinin transfer fonksiyonu
oluşturulmuştur. Aşım ve salınım güvenlik gerektiren bazı
uygulamalarda istenmez ve aşım ve salınımın olmadığı
sistemler aşırı sönümlü sistemler olarak adlandırılır. Bu
çalışmada güvenlik gerekçesi nedeni ile sistemin aşırı sönümlü
olması istenmiş ve bunun için ζ değeri 1.2 seçilmiştir. n
değeri arttıkça sistemin yükselme ve oturma zamanı azalır
buna bağlı olarak doğal frekans 5 rad/s seçilmiştir ve seçilen
bu değer istenilen yükselme ve oturma zamanını
sağlamaktadır.
Referans Modeli transfer fonksiyonu [8]:
22
2
2
)(
nn
n
M
s
sG
(21)
Seçilen referans modelinde yükselme zamanı 2.0156 sn ve
oturma zamanı 3.6295 sn’dir.
4.1. Sistemin Waijung Blok Setleri Kullanılarak
Oluşturulan Simulink Modeli
Waijung blok setleri ile oluşturulan ve STM32F4 uygulama
geliştirme kitine yüklenen Simulink modeli Şekil 4’te
görülmektedir. Ayrıca Simulink modeli kontrol
parametrelerine ait 3 alt modele sahiptir ve bu alt modeller
Şekil 5-6-7’de verilmiştir.
Şekil 5: KP ayarlama mekanizması Simulink alt modeli
Şekil 6: Kİ ayarlama mekanizması Simulink alt modeli
Şekil 7: KD ayarlama ekanizması Simulink alt modeli
4.2. Gerçek Zamanlı Uygulama Sonuçları
Sistemin farklı referanslara karşı gerçek zamanlı yanıtları
Şekil 4: MRUPIDD sisteminin STM32F4 Simulink modeli
316

incelenmiş ve grafikler elde edilmiştir. Farklı referans
girişlerinin maksimum değeri olarak 4 rad/sn seçilmiştir. 4
rad/sn seçilmesinin nedeni deneylerde kullanılan DC motorun
maksimum hız değerinin 6.5 rad/sn civarında olmasıdır.
Deneylerde, sistemin karakteristik özellikleri açısından en
uygun KP Kİ ve KD ayarlama kazançları sırasıyla 6, 6 ve 2
olarak elde edilmiş ve bu çalışmada 4 rad/sn’lik basamak
fonksiyonunun giriş olarak kullanıldığı sistem yanıtı haricinde
elde edilen tüm sistem yanıtlarında bu kazanç değerleri
kullanılmıştır. 4 rad/sn‘lik basamak fonksiyonun giriş olarak
uygulandığı durumda KP Kİ ve KD ayarlama kazançları
sırasıyla 12, 12 ve 5 olarak girilmiştir. Farklı girişlere karşı
alınan yanıtlar Şekil 9 ve Şekil 14 arasında gösterilmiştir.
4.2.1. 4 rad/sn’lik Basamak Fonksiyonun Giriş Olarak
Uygulanması
Şekil 8’de, giriş olarak verilen 4 rad/sn’lik basamak
fonksiyonu ile DC motor sisteminin ve referans modelinin bu
girişe verdikleri yanıtlar gösterilmektedir.
Şekil 8: Referans modelinin ve sistemin girişe verdiği
yanıt
Şekil 9’da, tasarlanan denetleyiciye ait kontrol
parametrelerinin zamana göre aldığı değerler verilmektedir.
Kontrol parametreleri yaklaşık olarak 4 saniye sonra
değişmemektedir.
Şekil 9: KP Kİ ve KD değerlerinin değişimi
4.2.2. Darbe Fonksiyonunun Giriş Olarak Uygulanması
Şekil 10’da, sisteme giriş olarak verilen darbe fonksiyonu ile
geçici rejimde DC motor sisteminin ve referans modelinin bu
girişe verdikleri yanıtlar gösterilmektedir.
Sisteme uygulanan darbe fonksiyonunun özellikleri:
Darbe fonksiyonu genliği: 4
Darbe fonksiyonu periyodu: 10
Darbe fonksiyonu genişliği: %50
Şekil 10: Referans modelinin ve sistemin geçici
rejimde girişe verdiği yanıt
Şekil 11’de, tasarlanan denetleyiciye ait kontrol
parametrelerinin geçici rejimde zamana göre aldığı değerler
görülmektedir.
Şekil 11: Geçici rejimde KP Kİ ve KD değerlerinin
değişimi
Şekil 12’de, sisteme giriş olarak verilen darbe fonksiyonu
ile geçici rejimden sonra DC motor sisteminin ve referans
modelinin bu girişe verdikleri yanıtlar gösterilmektedir. Geçici
rejimden sonra sistemin, arzu edilen çıkışı takip ettiği
görülmektedir.
317

Şekil12: Referans modelinin ve sistemin geçici
rejimden sonra girişe verdiği yanıt
Şekil 13’te, tasarlanan denetleyiciye ait kontrol
parametrelerinin geçici rejimden sonra zamana göre aldığı
değerler verilmiştir.
Şekil 13: Geçici rejimden sonra KP Kİ ve KD
değerlerinin değişimi
4.2.3. Sinüs Fonksiyonunun Giriş Olarak Uygulanması
Şekil 14’te, sisteme giriş olarak verilen sinüs fonksiyonu ile
DC motor sisteminin ve referans modelinin bu girişe
verdikleri yanıtlar gösterilmektedir.
Şekil 14: Referans modelinin ve sistemin girişe verdiği
yanıt
Şekil 15’te, tasarlanan denetleyiciye ait kontrol
parametrelerinin zamana göre aldığı değerler görülmektedir.
Şekil 15: KP Kİ ve KD değerlerinin değişimi
Not : MRUPIDD, farklı parametre değerlerine sahip DC
motorlar için de benzer performans sağlayacaktır.
5. Sonuçlar
Sistem parametrelerinin değişmesi, çevresel durumlar, bozucu
etkiler sistem kontrolünü zorlaştırmaktadır. Bu gibi
durumların etkili olduğu sistemlerde en uygun kontrol
yöntemlerinden biri uyarlamalı kontrol tekniğidir. Bu
çalışmada farklı girişlere karşı MRUPIDD tasarımı yapılarak
DC motor hız denetimini incelenmiştir. İlk olarak 4 rad/sn’lik
basamak fonksiyon girişi uygulanmıştır. Yapılan testlerde γp, γi, γD değerlerinin sırasıyla 1, 1, 0.02’den 12, 12, 5’e artması
ile geçici rejim boyunca sistem çıkışı ile referans modeli
arasındaki fark olan takip etme hatasının azaldığı
gözlemlenmiştir. Daha sonra giriş olarak darbe fonksiyonu
uygulanmış ve geçici rejim boyunca sistem yanıtında
318

salınımların ve aşımın olduğu, geçici rejimden sonra sistemin
arzu edilen çıkışı takip ettiği gözlemlenmiştir. Son olarak
genliği 2 ile 6 rad/sn arasında değişen 0.1 Hz’lik sinüs
fonksiyonu giriş olarak uygulanmış ve sistemin hızlı bir
şekilde geçici rejimden çıkıp arzu edilen çıkışı takip ettiği
gözlemlenmiştir.
Kaynakça
[1] Jain P., Nigam M., J., “Design of a Model Reference
Adaptive Controller Using Modified MIT Rule for a
Second Order System”, Research India Publications,
ISSN 2231-1297, Volume 3, Number 4 (2013).
[2] http://en.wikipedia.org/wiki/Adaptive_control
[3] Sar S., K., Dewan L., “MRAC Based PI Controller for
Speed Control od D.C. Motor Using Lab View”,
Department of Electrical Engineering National Institute
of Technology Kurukshetra India.
[4] Ali A., Tayeb E., Mohd O., “Adaptive PID Controller for
Dc Motor Speed Control”, International Journal of
Engineering Inventions, ISSN: 2278-7461, Volume 1,
Issue 5 (September2012) PP: 26-30.
[5] http://www.ee.usyd.edu.au/tutorials_online/matlab/exam
ples/motor/motor.html
[6] Astrom K., J., Wittenmark B., “Adaptive Control”, 2nd
Ed. Pearson Education Asia, 2001, pp. 185-225.
[7] http://www.pages.drexel.edu/~kws23/tutorials/MRAC/th
eory/theory.html
[8] Kuo B.C., “Automatic Control Systems”, Prentice Hall,
Inc. 1975.
319


















