
Data Evaluation for a Newly Developed Slack-Line Mooring ...
20
Data Evaluation for a Newly Developed Slack-Line Mooring Buoy Deployed in the Eastern Indian Ocean IWAO UEKI Research Institute for Global Change, Japan Agency for Marine-Earth Science and Technology, Yokosuka, Japan NOBUHIRO FUJII Marine Works Japan, Ltd., Yokohoma, Japan YUKIO MASUMOTO AND KEISUKE MIZUNO Research Institute for Global Change, Japan Agency for Marine-Earth Science and Technology, Yokosuka, Japan (Manuscript received 17 August 2009, in final form 1 March 2010) ABSTRACT For the purpose of climate research and forecasting the Research Moored Array for African–Asian– Australian Monsoon Analysis and Prediction (RAMA) in the Indian Ocean has been planned. Development of RAMA has been gradually accelerated in recent years as a multinational effort. To promote RAMA the authors have developed a small size buoy system, which uses the slack-line mooring method, intended for the easy handling of maintenance on a relatively small vessel. The authors have also conducted a field experiment of the simultaneous deployment of new slack-line mooring and conventional taut-line mooring in the eastern Indian Ocean. This paper describes the performance of the newly developed buoy system, especially the data consistency against the taut-line mooring system, which is usually used for a tropical moored buoy array. Although the slack-line mooring method has the advantage of downsizing the total mooring system, it also has the disadvantage of having relatively large vertical shifts of installed sensors produced by a large migration of the surface buoy. To offset this disadvantage to a certain extent, a data reconstruction method has been developed and evaluated. Through the data comparison between both mooring systems, it is confirmed that the reconstructed data of the newly developed buoy can basically capture the same features as that observed with a conventional taut-line mooring system. The maximum mean difference of 20.168C and the maximum root-mean-square (RMS) difference of 0.588C for temperature appeared within the thermocline layer, whereas the maximum mean difference of 0.02 and the maximum RMS difference of 0.09 for salinity appeared within the mixed layer. Considering a distance of 8 n mi between the two moorings, these values are ac- ceptable for regarding that the two moorings can observe same feature. Results of this study support the introduction of various types of mooring systems for a multinational approach of RAMA and contribute to the further progress of RAMA, climate research, and forecasting. 1. Introduction The tropical buoy array, which consists of the Tropical Atmosphere Ocean/Triangle Trans-Ocean Buoy Net- work (TAO/TRITON) array in the Pacific, the Prediction and Research Moored Array in the Tropical Atlantic (PIRATA) in the Atlantic, and the Research Moored Array for African–Asian–Australian Monsoon Analysis and Prediction (RAMA) in the Indian Ocean, is an im- portant component of several global earth observing systems—such as the Global Ocean Observing System (GOOS) and the Global Climate Observing System (GCOS). These basin-scale tropical mooring arrays have been designed to describe and monitor climate variability, such as the El Nin ˜ o–Southern Oscillation (ENSO) in the Pacific. An advantage of using a mooring array is its ca- pability to capture the short-term variability of the ocean and the atmosphere associated with climate variability. A highly developed mooring array is the TAO/TRITON array in the Pacific. The data observed with TAO/ TRITON array are used for ENSO monitoring, prediction, Corresponding author address: Iwao Ueki, Japan Agency for Marine-Earth Science and Technology, 2-15 Natsushima-cho, Yokosuka 237-0061, Japan. E-mail: [email protected] JULY 2010 UEKI ET AL. 1195 DOI: 10.1175/2010JTECHO735.1 Ó 2010 American Meteorological Society Unauthenticated | Downloaded 12/25/21 10:26 AM UTC
Transcript of Data Evaluation for a Newly Developed Slack-Line Mooring ...

Data Evaluation for a Newly Developed Slack-Line Mooring Buoy Deployedin the Eastern Indian Ocean
IWAO UEKI
Research Institute for Global Change, Japan Agency for Marine-Earth Science and Technology, Yokosuka, Japan
NOBUHIRO FUJII
Marine Works Japan, Ltd., Yokohoma, Japan
YUKIO MASUMOTO AND KEISUKE MIZUNO
Research Institute for Global Change, Japan Agency for Marine-Earth Science and Technology, Yokosuka, Japan
(Manuscript received 17 August 2009, in final form 1 March 2010)
ABSTRACT
For the purpose of climate research and forecasting the Research Moored Array for African–Asian–
AustralianMonsoon Analysis and Prediction (RAMA) in the Indian Ocean has been planned. Development
of RAMA has been gradually accelerated in recent years as a multinational effort. To promote RAMA the
authors have developed a small size buoy system, which uses the slack-line mooring method, intended for the
easy handling of maintenance on a relatively small vessel. The authors have also conducted a field experiment
of the simultaneous deployment of new slack-line mooring and conventional taut-line mooring in the eastern
Indian Ocean. This paper describes the performance of the newly developed buoy system, especially the data
consistency against the taut-line mooring system, which is usually used for a tropical moored buoy array.
Although the slack-linemooringmethod has the advantage of downsizing the total mooring system, it also has
the disadvantage of having relatively large vertical shifts of installed sensors produced by a large migration of
the surface buoy. To offset this disadvantage to a certain extent, a data reconstruction method has been
developed and evaluated. Through the data comparison between both mooring systems, it is confirmed that
the reconstructed data of the newly developed buoy can basically capture the same features as that observed
with a conventional taut-line mooring system. The maximum mean difference of20.168C and the maximum
root-mean-square (RMS) difference of 0.588C for temperature appeared within the thermocline layer,
whereas themaximummean difference of 0.02 and themaximumRMSdifference of 0.09 for salinity appeared
within the mixed layer. Considering a distance of 8 n mi between the two moorings, these values are ac-
ceptable for regarding that the two moorings can observe same feature. Results of this study support the
introduction of various types of mooring systems for a multinational approach of RAMA and contribute to
the further progress of RAMA, climate research, and forecasting.
1. Introduction
The tropical buoy array, which consists of the Tropical
Atmosphere Ocean/Triangle Trans-Ocean Buoy Net-
work (TAO/TRITON) array in the Pacific, the Prediction
and Research Moored Array in the Tropical Atlantic
(PIRATA) in the Atlantic, and the Research Moored
Array for African–Asian–Australian Monsoon Analysis
and Prediction (RAMA) in the Indian Ocean, is an im-
portant component of several global earth observing
systems—such as the Global Ocean Observing System
(GOOS) and the Global Climate Observing System
(GCOS). These basin-scale tropical mooring arrays have
been designed to describe and monitor climate variability,
such as the El Nino–Southern Oscillation (ENSO) in the
Pacific. An advantage of using a mooring array is its ca-
pability to capture the short-term variability of the ocean
and the atmosphere associated with climate variability.
A highly developedmooring array is the TAO/TRITON
array in the Pacific. The data observed with TAO/
TRITONarray are used forENSOmonitoring, prediction,
Corresponding author address: Iwao Ueki, Japan Agency for
Marine-Earth Science and Technology, 2-15 Natsushima-cho,
Yokosuka 237-0061, Japan.
E-mail: [email protected]
JULY 2010 UEK I ET AL . 1195
DOI: 10.1175/2010JTECHO735.1
� 2010 American Meteorological SocietyUnauthenticated | Downloaded 12/25/21 10:26 AM UTC

and process study in associated mechanisms (McPhaden
et al. 1998; Kuroda and Amitani 2001). PIRATA, de-
veloped as a multinational array by Brazil, France, and
the United States, also provides useful information re-
garding the tropical Atlantic climate variability and its
prediction (Servain et al. 1998; Bourles et al. 2008).
Compared with arrays in the Pacific and the Atlantic,
RAMA in the Indian Ocean is still developing. The
Indian Ocean has important climate variability, such as
monsoon activity (Webster et al. 1998) and the Indian
Ocean Dipole (IOD) event (Saji et al. 1999; Webster
et al. 1999), which affects the local and world climate
through atmospheric teleconnections. RAMA is par-
ticularly effective for research and prediction of intra-
seasonal variability, such as theMadden–Julian oscillation
(MJO;Madden and Julian 1994; Lloyd and Vecchi 2010).
Despite the recognition of the societal and economic im-
pacts of climate variability in the Indian Ocean at pres-
ent, we do not have adequate observational data for
understanding the coupled ocean–atmosphere behavior.
The Climate Variability and Predictability (CLIVAR)/
GOOS Indian Ocean Panel (IOP) established an imple-
mentation plan for the sustained basin-scale IndianOcean
observing system (IndOOS), which consists of satellite-
based and in situ measurements (Meyers and Boscolo
2006; Masumoto et al. 2010). The satellite-based mea-
surements provide oceanic surface properties, such as
sea surface temperature, sea level, wind, rain, cloud, and
ocean color, whereas the in situ measurements provide
subsurface information. The in situ measurements cover
a variety of elements, such as the basin-scale mooring
array, Argo floats, surface drifters, expendable bathy-
thermograph (XBT) lines, and coastal tide gauge sta-
tions. RAMA, a component of IndOOS, is essential for
capturing the seasonal monsoon variability and intra-
seasonal disturbances. Simultaneous measurements for
oceanic and meteorological variables lead us to in-
vestigate the relationship and interaction between var-
iations in both the fields.
The main portion of the planned RAMA consists of
38 surface moorings, which measure subsurface tem-
perature, salinity, and mixed layer currents, and surface
meteorological variables. In addition to these surface
moorings, RAMA has eight subsurface acoustic Doppler
current profilers (ADCPs) and current-meter moorings
for subsurface and deep currents (Masumoto et al. 2005;
Sengupta et al. 2004;Murty et al. 2006). The array covers
major regions associated with the ocean–atmosphere
interaction in the Indian Ocean, such as the equatorial
waveguide; the Arabian Sea and the Bay of Bengal,
where intraseasonal and semiannual atmospheric forc-
ing is dominant; the eastern and western pole of IOD;
and the thermocline ridge near 108S. The array is de-
signed to capture the basin-scale pattern of oceanic and
atmospheric variability on intraseasonal to interannual
time scales. The mooring observations at fixed positions
are suitable for studying oceanic responses for atmo-
spheric disturbances such as theMJO, ocean–atmospheric
interactions, and mixed layer dynamics. In addition to
using the acquired data for studying the previously
mentioned scientific interest, the data are also used for
developing operational climate forecast models and
carrying out weather and climate prediction, ocean-
state monitoring, reanalysis, and satellite validation.
The lifetime of each mooring is basically 1 yr; there-
fore, annual replacement of the moorings is required.
By making reasonable assumptions, McPhaden et al.
(2006) estimated that a minimum of 142 days of ship
time per year is required tomaintain the completeRAMA
array. To solve this fundamental problem, a multina-
tional approach is required for securing financial resources
and ship time. At present, nations including Japan, the
TABLE 1. Observed parameters and depths of underwater sensors for m-TRITON and TRITONmoorings. Except temperature, salinity,
and pressure, each mooring has a current meter at a depth of 10 m.
m-TRITON TRITON
Level No. Depth (m) Parameter Depth (m) Parameter
1 1 Temperature, conductivity, pressure 1.5 Temperature, conductivity
2 10 Temperature, conductivity, pressure 25 Temperature, conductivity
3 20 Temperature, conductivity, pressure 50 Temperature, conductivity
4 40 Temperature, conductivity, pressure 75 Temperature, conductivity
5 60 Temperature, pressure 100 Temperature, conductivity
6 80 Temperature, pressure 125 Temperature, conductivity
7 100 Temperature, conductivity, pressure 150 Temperature, conductivity
8 120 Temperature, pressure 200 Temperature, conductivity
9 140 Temperature, pressure 250 temperature, conductivity
10 200 Temperature, pressure 300 Temperature, conductivity, pressure
11 300 Temperature, pressure 500 Temperature, conductivity
12 500 Temperature, pressure 750 Temperature, conductivity, pressure
1196 JOURNAL OF ATMOSPHER IC AND OCEAN IC TECHNOLOGY VOLUME 27
Unauthenticated | Downloaded 12/25/21 10:26 AM UTC

United States, India, Indonesia, China, and France pro-
vide mooring equipment, ship time, logistic support, and
so on. The present status of RAMA is 54% complete,
with 25 of the 46 total mooring sites occupied at the end
of February 2010. The percentage increased gradually
compared with 47% at the end of 2008, reported by
McPhaden et al. (2009).
The Japan Agency for Marine-Earth Science and
Technology (JAMSTEC) deployed anADCP subsurface
mooring at 08908E in 2000 (Masumoto et al. 2005) and
two TRITON moorings at 58S, 958E and 1.58S, 908E in
2001 (Hase et al. 2008). These moorings became an ini-
tiation of the basin-scale IndianOceanmooring array. In
2005, JAMSTEC started a 5-yr program named the In-
dian Ocean Moored Buoy Network Initiative for Cli-
mate Studies (IOMICS) for promoting RAMA. In this
program, it is vital to develop a small size buoy system,
which will enable an easier mooring operation, reduce
maintenance costs, and enhance its capability for data
sampling and transmission. To reduce the surface buoy
size, the slack-linemooringmethod is adopted instead of
the taut-line mooring method for the TRITON buoy.
The two TRITON mooring sites described before were
replaced by the new buoy system named m-TRITON in
February 2008.
In this study, we evaluate the observed data acquired
by the newly developed m-TRITON buoy through a
field experiment for two types of mooringmethods—the
FIG. 1. Schematic representation of the m-TRITON mooring system.
FIG. 2. Schematic diagram of the difference between (left) taut-
line and (right) slack-linemoorings. Note that the shape ofmooring
lines for both buoys is not to scale to emphasize the different
concepts.
JULY 2010 UEK I ET AL . 1197
Unauthenticated | Downloaded 12/25/21 10:26 AM UTC
slack-line and taut-line methods—in the eastern equa-
torial Indian Ocean. The characteristics of RAMA as a
multinational effort and the installation of various types
of moorings will be considered. Therefore, consistency
in data quality among different mooring methods is cru-
cial. Section 2 describes the newly developedm-TRITON
buoy and the difference between slack-line and taut-line
moorings. Details of the field experiment and the be-
havior of the m-TRITON buoy are given in sections 3
and 4. In section 5, we discuss the interpolation method
used for the acquired data. Data evaluation through the
field experiment is described in section 6, and the results
are summarized in section 7.
2. Development of the m-TRITON buoy
To understand the mechanisms of the Indian Ocean’s
variation and the importance of its role with respect to
the global climate system, JAMSTEC has started two
surface moorings named TRITON at 1.58S, 908E and
58S, 958E in the eastern Indian Ocean since 2001 fol-
lowing the western Pacific TRITON moorings. The fo-
cus of the Indian Ocean TRITON moorings is the IOD
and oceanic response to atmospheric disturbances such
as MJO and monsoon. These TRITON moorings have
successfully provided information about the condition of
the eastern Indian Ocean, especially for the IOD event in
2006 and 2007 (Horii et al. 2007). Although the TRITON
buoy shows good performance as a climate-monitoring
buoy system, the relatively large buoy size (weight of
the surface float is 2400 kg and diameter is 2.4 m) re-
quires a large vessel for maintenance and hence a high
cost.
To promote the activities related to the Global Earth
Observation System of Systems (GEOSS), JAMSTEC
started the IOMICS program in 2005. One of the vital
portions of this program is the development of a new
buoy system. TheCLIVAR/GOOS IOP established some
recommendations for the development and maintenance
of the basin-scale mooring array in the Indian Ocean. In
the case of the observed variables, the required variables
are almost the same as for the present TRITONmoorings,
such as wind, air temperature, relative humidity, short-
wave radiation, barometric pressure, and precipitation
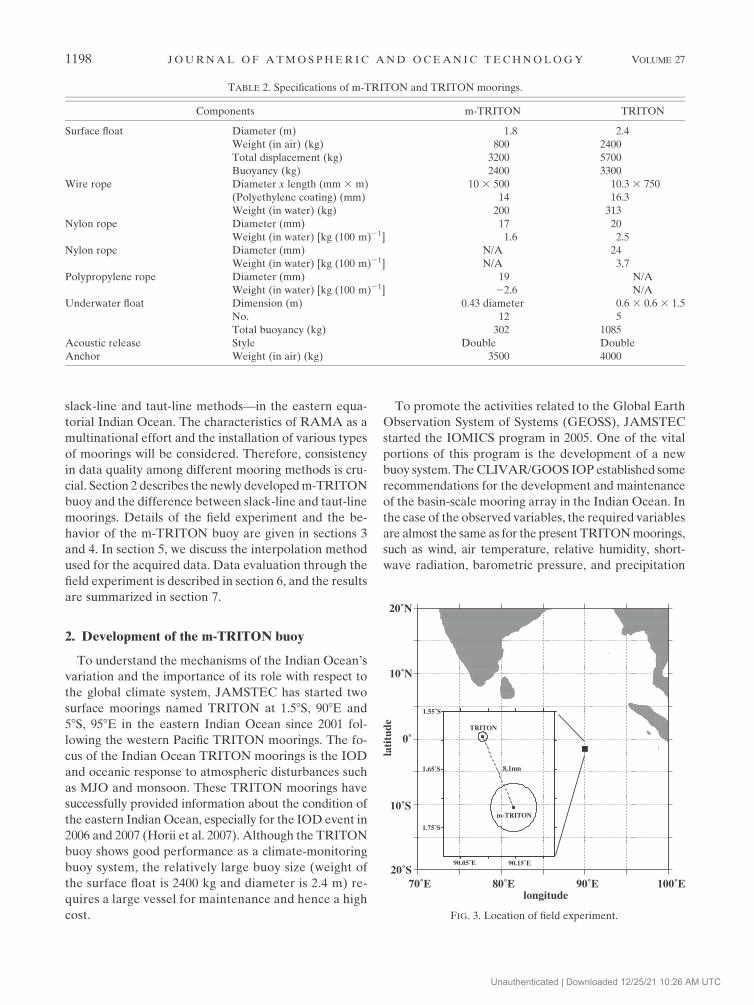
TABLE 2. Specifications of m-TRITON and TRITON moorings.
Components m-TRITON TRITON
Surface float Diameter (m) 1.8 2.4
Weight (in air) (kg) 800 2400
Total displacement (kg) 3200 5700
Buoyancy (kg) 2400 3300
Wire rope Diameter x length (mm 3 m) 10 3 500 10.3 3 750
(Polyethylene coating) (mm) 14 16.3
Weight (in water) (kg) 200 313
Nylon rope Diameter (mm) 17 20
Weight (in water) [kg (100 m)21] 1.6 2.5
Nylon rope Diameter (mm) N/A 24
Weight (in water) [kg (100 m)21] N/A 3.7
Polypropylene rope Diameter (mm) 19 N/A
Weight (in water) [kg (100 m)21] 22.6 N/A
Underwater float Dimension (m) 0.43 diameter 0.6 3 0.6 3 1.5
No. 12 5
Total buoyancy (kg) 302 1085
Acoustic release Style Double Double
Anchor Weight (in air) (kg) 3500 4000
FIG. 3. Location of field experiment.
1198 JOURNAL OF ATMOSPHER IC AND OCEAN IC TECHNOLOGY VOLUME 27
Unauthenticated | Downloaded 12/25/21 10:26 AM UTC
for meteorological variables, and also the upper-ocean
temperature, salinity, and horizontal currents for the
physical oceanographic variables. However, the sam-
pling levels in the ocean are slightly different between
both, depending on the shallower mixed layer in the
Indian Ocean. The observed parameters and depths for
m-TRITON are partly modified according to the recom-
mendations, as listed in Table 1. Another key issue of
the recommendations is a multinational approach for
array maintenance. Although each mooring belonging
to RAMA will be deployed through national programs,
the coordination of these national efforts at an inter-
national level is essential for optimizing the utilization of
resources, such as ship time and mooring facilities, to
coordinate deployment schedules, maintainmeasurement
standards, and promote the free and open exchange of
data. We basically follow the recommendation on the
development of the m-TRITON mooring system. To
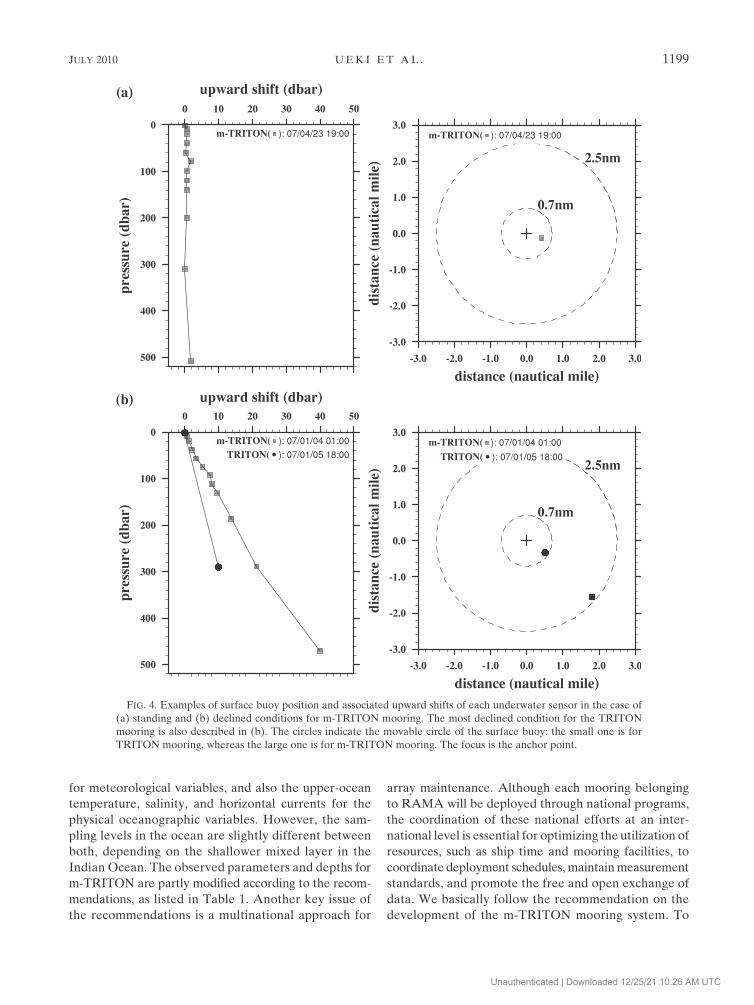
FIG. 4. Examples of surface buoy position and associated upward shifts of each underwater sensor in the case of
(a) standing and (b) declined conditions for m-TRITON mooring. The most declined condition for the TRITON
mooring is also described in (b). The circles indicate the movable circle of the surface buoy: the small one is for
TRITON mooring, whereas the large one is for m-TRITON mooring. The focus is the anchor point.
JULY 2010 UEK I ET AL . 1199
Unauthenticated | Downloaded 12/25/21 10:26 AM UTC

contribute to the multinational RAMA, our focus for
the new system development is concentrated on down-
sizing for the purpose of easy maintenance by smaller
vessels, which enables us to select from a wide range of
vessels for maintenance.
For this purpose, we have adopted a slack-linemooring
method for the m-TRITON system rather than the taut-
line mooring method used for the present TRITON sys-
tem. The basic concepts of our surface mooring are no
breaking off, no drifting with an anchor, and no sub-
merging the surface buoy. The slack-line mooring has a
relatively long mooring line, which is longer than the
water depth to reduce the tension along the mooring line.
A scope ratio, which is the ratio of the mooring line and
the water depth, of 1.3 is adopted for the m-TRITON
mooring system (Fig. 1). In the case of the same drag
force induced by currents, the tension along the moor-
ing line of a slack-linemooring is lower than that of taut-
line mooring because slack-line mooring allows a wider
range of surface buoy migration. Therefore, we can use
a small surface buoy, a thinner-diameter cable, and smaller
parts such as shackles, chains, and the anchor (Fig. 2).
The specifications of the m-TRITON and TRITON
mooring systems are listed in Table 2. Although the slack-
line mooring method has advantages for the downsizing
of the total system, it also has a disadvantage that un-
derwater sensors installed on the mooring line can ver-
tically move a large distance according to the larger
inclination of the mooring line as compared to that in
the case of the taut-line method. Therefore, we have to
observe the depth of each sensor and convert the ob-
served variables at each depth into those at the fixed
depth for the time series analysis. Because the data con-
version contains an error, which depends on the inter–
extrapolation method, verification is required.
3. Field experiment for data comparison
For the purpose of the verification of the performance
of a 1-yr mooring and data consistency between differ-
ent mooring methods, we conducted a field experiment
at 1.58S, 908E fromDecember 2006 to February 2008. In
the field experiment, two moorings by m-TRITON and
the present TRITON buoy were carried out. The dis-
tance between both moorings is approximately 8 n mi
(Fig. 3). The actual positions of both the moorings are
1842.989S, 90808.289E for m-TRITON and 1835.639S,90805.419E for TRITON.
In this study, we focus on the comparison between the
water temperature and salinity of both moorings. The
installed sensors for temperature and salinity are SBE-
37IM and SBE-39IM, manufactured by Sea-Bird Elec-
tronics, Inc, respectively. The nominal accuracies of
temperature and conductivity are 0.0028C and 0.0003
S m21, corresponding to a salinity of 0.002 at a conduc-
tivity level of around 6 S m21. Considering the calibra-
tion error of our sensor calibration system, the actual
accuracy of conductivity–salinity becomes (0.000 85 Sm21)/
(0.006) (Ando et al. 2005). These are the satisfactory
TABLE 3. Statistical values of the pressure observed with each
underwater sensor on m-TRITON mooring from 5 Dec 2006 to
6 Feb 2008.
Install
depth (m)
Statistical values of observed pressure (dbar)
Mean Std dev Min Max
10 9.73 0.13 8.47 10.18
20 19.66 0.18 18.13 20.40
40 39.66 0.35 36.04 40.61
60 59.21 0.52 53.22 60.25
80 78.13 0.76 69.37 79.63
100 99.14 1.02 87.90 100.58
120 118.72 1.29 104.66 120.41
140 138.60 1.56 121.56 140.49
200 198.25 2.38 172.79 200.73
310 307.49 4.09 264.50 311.65
510 503.55 7.91 455.85 511.71
FIG. 5. Time series of the surface buoy position (blue line) defined from the anchor point and
the observed pressure (red line) of the deepest sensor installed at 510 m.
1200 JOURNAL OF ATMOSPHER IC AND OCEAN IC TECHNOLOGY VOLUME 27
Unauthenticated | Downloaded 12/25/21 10:26 AM UTC

temperature value of 0.028Cand salinity value of 0.02 for
the recommendation accuracy supposed by CLIVAR/
GOOS IOP. Each underwater sensor was installed at
the standard depth, which is different between both
moorings, of each mooring system as listed in Table 1.
The standard depth of the TRITON mooring was de-
signed to capture the thick mixed layer of the western
Pacific Ocean, and the same mooring was deployed in
the Indian Ocean. However, the standard depth of the
m-TRITON mooring is designed for maintaining con-
sistency, as in the case of RAMA. The data acquired by
the TRITON mooring is converted into values at the
standard depth of m-TRITON using a type of spline
interpolation method proposed by Akima (1970) for
comparison.
Although data comparison between both moorings
was planned for 1-yr moorings fromDecember 2006, the
TRITON buoy unfortunately drifted after July 2007
because of vandalism. Therefore, available data for the
comparison is approximately 6 months. The temporal
resolution of each underwater sensor is 10 min for the
internal record, and the hourly averaged data are trans-
mitted by the ARGOS satellite communication system.
Because the minimum requirement for temporal sam-
pling of the RAMAdata is hourly, we use the hourly data
for comparison.
4. Behavior of the m-TRITON mooring
The m-TRITONmooring for the field experiment has
a scope ratio of 1.3 for a water depth of 4700 m,meaning
that there is a total mooring line of 6100 m. Further, it
allows for a movable radius of 3900 m, corresponding to
approximately 2.1 n mi, for the surface buoy. The be-
havior of the surface buoy and each underwater sensor
are illustrated as examples of the standing and inclined
TABLE 4. List of CTD casts on buoy operation cruise around
1.58S, 908E.
Date Location Cruise code
14 Nov 2000 00859.959S, 90800.149E MR00-K07
14 Nov 2000 02800.019S, 90800.069E MR00-K07
23 Oct 2001 01840.339S, 89859.539E MR01-K05
23 Oct 2001 01859.969S, 89859.829E MR01-K05
30 Jul 2002 01835.959S, 90803.669E MR02-K04
30 Jul 2002 01839.259S, 90800.679E MR02-K04
30 Jul 2002 02800.019S, 90800.049E MR02-K04
12 Jul 2003 01840.059S, 90800.779E MR03-K03
12 Jul 2003 01835.299S, 90804.659E MR03-K03
13 Jul 2003 01859.819S, 89859.779E MR03-K03
10 Jul 2004 01840.339S, 89859.129E MR04–03
8 Aug 2005 01837.699S, 90802.139E MR05–03
10 Aug 2005 02800.079S, 89859.859E MR05–03
5 Dec 2006 01838.369S, 90800.409E MR06–05
8 Feb 2008 01840.799S, 90801.439E MR07–07
FIG. 6. (a) Temperature and (b) salinity profiles observed with 15 CTD casts conducted on the buoy operation
cruise from 2000 to 2007. The red line indicates the mean profile of all casts, and the closed circles on the y axes
represent the target depths for the buoy observation.
JULY 2010 UEK I ET AL . 1201
Unauthenticated | Downloaded 12/25/21 10:26 AM UTC

conditions in Fig. 4. For the standing condition, when the
surface buoy is located around the anchor point, each
underwater sensor is located at the appropriate depths,
which are the nominal install depths of 1, 10, 20, 40, 60,
80, 100, 120, 140, 200, 310, and 510 m. It should be noted
that the two deeper sensors are installed below the tar-
get depths of 300 and 500 m because of the consider-
ation for the upward shift of underwater sensors. On the
other hand, the positions of underwater sensors become
shallower with an increase in the depth for the inclined
condition. In the case of the most declined condition,
the upward shifts of each underwater sensor for the
m-TRITON mooring are approximately twice as large
as those for TRITON mooring.
The statistical values for the observed pressure of
each underwater sensor during the mooring period from
December 2006 to February 2008 are listed in Table 3.
It should be noted that a pressure value in decibars at
a certain depth in the upper layer of the eastern Equa-
torial Indian Ocean is approximately 0.6% larger than
a depth value in meters. Considering the marking error
for the installation depth of each sensor on a wire rope,
we can regard the maximum value of the observed pres-
sure as the realistic installation depth. Except for the
sensor installed at a depth of 510 m, differences between
the observed mean and the installed depth of each
sensor are within a few decibars. The values of standard
deviation increase with an increase in depth. Consider-
ing an accuracy of 1.5 dbar for the pressure measure-
ment, effects of slack-line mooring appeared below 80 m.
The percentage of pressure values within themean plus–
minus accuracy in the total period are more than 95%
above 80 m, around 90% in the thermocline layer from
80 to 140 m, and less than 65% below 140 m. These
values imply that an effect of slack-line mooring cannot
be ignored, especially in a deeper layer. For the deepest
sensor installed at 510 m, the mean observed pressure is
503.6 dbar with a standard deviation of 7.9 dbar and the
maximum upward shift indicates approximately 55 dbar.
This high variability is caused by the variation in a tilt of
the mooring line, and it is a characteristic of the slack-
line mooring method.
The relationship between the surface buoy position
defined from the anchor point and the deepest sensor
depth is shown in Fig. 5. The anchor point is detected by
acoustical triangulation after buoy deployment, and the
surface buoy position is calculated by the ARGOS sys-
tem. The observed pressure has the tendency to de-
crease when the surface buoy is away from the anchor
point. The lowest observed pressure under 480 dbar ap-
peared in January 2007, and the longest distance from the
anchor point to the surface buoy was recorded at that
FIG. 7. Profile of the vertical gradient for temperature calculated from 15 CTD casts: (a) mean and (b) std dev. (c),(d) As in (a),(b), but
for salinity.
1202 JOURNAL OF ATMOSPHER IC AND OCEAN IC TECHNOLOGY VOLUME 27
Unauthenticated | Downloaded 12/25/21 10:26 AM UTC

time. Although a tilt of the mooring line is also affected
by the vertical structure of ocean currents, the upward
shifts of each underwater sensor are mainly governed by
the surface buoy position.
5. Reconstruction of standard-level data
As described in the previous section, the vertical po-
sitions of each sensor installed on the m-TRITON
mooring have a relatively large variation, especially the
deeper sensors, because of the adoption of the slack-line
mooring method. As a result, the observed temperature
and salinity include effects of sensor position shifts in
addition to temporal variation. It should be noted that
we concentrate on the effects of the vertical shifts of in-
stalled sensors because the horizontal gradients of tem-
perature and salinity are relatively small compared with
the vertical gradients of these variables, except the sa-
linity front caused by a low-salinity patch.
Before the development of the m-TRITON buoy, we
deployed TRITON buoys at the same sites from 2000
and conducted 15 CTD casts around 1.58S, 908E during
buoy operation cruises (Table 4). Although 15 casts are
insufficient to describe the nature of variability for the
temperature and salinity at the site, we can confirm the
basis of the vertical structure of temperature and salin-
ity from these vertically high-resolution data. Figure 6
shows the temperature and salinity profiles observed
with CTD casts around 1.58S, 908E. Although the ther-
moclines appeared to have a relatively wide range from
60 to 120 dbar, a large difference among the casts was
related to the variations in the mixed layer thickness and
sharpness of the thermocline. Compared with the value
in the case of the thermocline layer, the difference above
40 dbar and below 200 dbar was relatively small. With
respect to salinity profiles, there was a salinity maximum
between 60 and 120 dbar. Basically, a layer of uniform
salinity was recognized near the sea surface; however, its
thickness varied largely. Moreover, the shallow halo-
cline appeared when the sea surface salinity was low.
The vertical gradient of temperature and salinity cal-
culated from the CTD casts are also shown in Fig. 7.
In the case of temperature, large gradients appeared
around the thermocline, and the maximum values of the
mean and standard deviation of the 15 casts were20.738and 0.938C dbar21. Meanwhile, large gradients for sa-
linity appeared above and below the salinity maximum.
The maximum vertical gradient appeared at 92 dbar,
and the values of the mean and standard deviation of
the 15 casts in this case were 0.03 and 0.12 dbar21,
FIG. 8. (a) Temperature and (b) salinity profiles observed with the CTD cast and m-TRITON mooring after
deployment. The solid lines indicate the CTD cast data, and the blue and red circles indicate the raw and the
reconstructed standard-level data, respectively.
JULY 2010 UEK I ET AL . 1203
Unauthenticated | Downloaded 12/25/21 10:26 AM UTC

respectively. The accuracy of the pressure sensor in-
stalled in the m-TRITON mooring was 1.5 dbar; there-
fore, the observational error for temperature and salinity
can exceed 1.108C and 0.05 at the depth at which the
maximum vertical gradient appeared. In addition to this
observational error, the vertical shifts of the installed
sensors caused by the slack-line mooring method led to
an additional error, if we considered the nominal target
depth as the correct depth without any correction.
Although each underwater sensor measures pressure,
for convenient use of the observed temperature and
salinity, raw data should be reconstructed into standard-
level data by an appropriate procedure, which reduces
the misinterpretation of the observational error caused
by the effects of the vertical shifts of the installed sen-
sors. The standard levels are defined by the target depths
of 1, 10, 20, 40, 60, 80, 100, 120, 140, 200, 300, and 500 m
for temperature and 1, 10, 20, 40, and 100 m for salinity—
these levels are recommended by CLIVAR/GOOS IOP.
Basically, we applied the Akima spline method proposed
byAkima (1970) for the reconstruction. TheAkima spline
method is a continuously differentiable subspline inter-
polation. It is built from piecewise third-order poly-
nomials and has an advantage of avoiding the typical
spline overshooting that occurs when the behavior of
the spline points is nonpolynomic. Because all under-
water sensors measure pressure, we can acquire 12 sets
of (P, T) pairs and 5 sets of (P, S) pairs. From these pairs
we get temperature and salinity profiles by applying the
Akima spline method, and temperature and salinity at
standard levels are extracted. For the bottom level, we
used the linear inter–extrapolation method instead of the
Akima spline method to avoid relatively large errors, de-
pending on how low was the resolution of measurements
in the vertical.
To confirm the normal operation of each underwater
sensor, we conducted a CTD cast near the m-TRITON
mooring when the deployment was completed. The ac-
quired profiles could be used for confirming the re-
constructionmethod. Figure 8 indicates the temperature
and salinity profiles at 1841.409S, 90810.289E, which
corresponds to a 4.7-km northeast point from the
m-TRITON mooring. The raw and reconstructed data
observed with the m-TRITON mooring are also shown
in Fig. 8. For the reconstruction of standard-level data of
the deepest level, corresponding to 500 m for tempera-
ture and 100 m for salinity, the deepest sensor may lo-
cate shallower than the deepest standard level because
of the inclined mooring line. In fact, in the case of this
comparison with the CTD cast, the observed pressure
of the deepest sensor for the salinity was 98.8 dbar. In
this case, the reconstruction of standard-level data for
100-dbar salinity was carried out by using linear extrap-
olation instead of the Akima spline method. Except the
sea surface salinity, the reconstructed data including
the deepest level were consistent with the CTD cast data
FIG. 9. Mean profiles of (a) temperature and (b) salinity calculated from 15 CTD casts with the observed pressure
variation range corresponding to minimum–maximum range from 5 Dec 2006 to 6 Feb 2008. The closed circles
indicate values at standard levels.
1204 JOURNAL OF ATMOSPHER IC AND OCEAN IC TECHNOLOGY VOLUME 27
Unauthenticated | Downloaded 12/25/21 10:26 AM UTC

and the raw data in this comparison. A large sea surface
salinity difference between m-TRITON and CTD cast
observations might be caused by the relationship be-
tween the small horizontal structure of a low-salinity
patch and the difference between both the observation
points. We do not expect such sharp gradients at deeper
levels; therefore, we have to pay attention to the re-
construction of the deepest-level data. Although the
vertical gradient of temperature between 300 and 500 m
was relatively small in the equatorial Indian Ocean, the
salinity between 40 and 100 mwas quite large because of
the existence of a high-salinity core at around 100 m.
Therefore, the reconstructed salinity data for 100 m
might contain a relatively large error because of the po-
sition of the salinity maximum.
Although the validity of the adopted reconstruction
method was tested through the comparison between the
observed data with the m-TRITON mooring and the
CTD cast conducted just after deployment, the slack-
line mooring effect was not dominant in this situation;
the observed pressure of each sensor was almost equiv-
alent to that of the nominal target depth. Therefore, by
using the past 15 CTD casts presented previously, we
conducted a virtual test for the evaluation of the in-
terpolation method by simulating the slack-line effect.
The virtual test was carried out as follows. First, we
gathered temperature and salinity data at virtual ob-
served levels, which were defined by 14-month statistics
of the observed pressure described in section 3 from
each CTD cast. The virtual observed levels were set up
for three test cases: virtual observed pressure had values
of mean minus standard deviation, mean plus standard
deviation, and minimum. Then, we reconstructed the
standard-level data from the virtually observed data us-
ing the adopted method. Finally, the standard-level data
were compared with the real-value data, which were
gathered at each nominal standard level from the origi-
nal CTD cast. This procedure was repeated for 15 CTD
casts for each case.
Figure 9 indicates the mean temperature and salinity
profiles calculated from 15 CTD casts with minimum
TABLE 5. Error estimation of virtual test for temperature, with
values of the 14-month observed mean minus the standard de-
viation as the virtual observed pressure. The OE is misleading
when we regard the observed data as the standard-level data
without any correction, and the RE is defined as the difference
between the reconstructed data and the real data at the standard
level.
Standard
level (m)
Temperature
at standard
level (8C)Pressure
(dbar)
OE (8C) RE (8C)
Mean
Std
dev Mean
Std
dev
10 29.10 9.60 0.00 0.00 0.00 0.00
20 29.11 19.48 0.00 0.01 0.00 0.01
40 29.08 39.32 0.00 0.01 0.00 0.01
60 28.94 58.69 0.02 0.04 0.00 0.03
80 27.41 77.37 0.29 0.42 0.08 0.21
100 25.27 98.12 0.27 0.34 20.08 0.27
120 18.64 117.44 0.87 0.98 0.34 0.76
140 16.32 137.04 0.18 0.16 20.05 0.20
200 13.15 195.87 0.15 0.12 0.06 0.12
300 11.33 303.41 20.04 0.03 0.00 0.04
500 9.60 495.64 0.02 0.02 20.01 0.02
TABLE 6. As in Table 5, but with values of the 14-month ob-
served mean plus the standard deviation as the virtual observed
pressure.
Standard
level (m)
Temperature
at standard
level (8C)Pressure
(dbar)
OE (8C) RE (8C)
Mean
Std
dev Mean
Std
dev
10 29.10 9.86 0.00 0.00 0.00 0.00
20 29.11 19.84 0.00 0.00 0.00 0.00
40 29.08 40.01 0.00 0.00 0.00 0.00
60 28.94 59.74 0.00 0.00 0.00 0.00
80 27.41 78.89 0.07 0.10 0.01 0.06
100 25.27 100.16 0.00 0.00 0.00 0.00
120 18.64 120.01 0.00 0.00 0.00 0.00
140 16.32 140.16 0.00 0.00 0.00 0.00
200 13.15 200.64 20.02 0.01 0.01 0.02
300 11.33 311.58 20.15 0.09 0.00 0.13
500 9.60 511.47 20.06 0.05 0.03 0.05
TABLE 7. As in Table 5, but with the minimum values of observed
pressure within 14 months as the virtual observed pressure.
Standard
level (m)
Temperature
at standard
level (8C)Pressure
(dbar)
OE (8C) RE (8C)
Mean
Std
dev Mean
Std
dev
10 29.10 8.47 0.01 0.02 0.01 0.02
20 29.11 18.13 0.00 0.02 0.00 0.01
40 29.08 36.04 0.01 0.02 0.00 0.01
60 28.94 53.22 0.08 0.16 20.09 0.23
80 27.41 69.37 1.01 1.48 0.16 0.33
100 25.27 87.90 1.59 1.39 20.08 0.44
120 18.64 104.66 5.74 3.42 20.06 0.26
140 16.32 121.56 1.86 0.65 20.14 0.86
200 13.15 172.79 1.02 0.25 0.21 0.19
300 11.33 264.50 0.45 0.25 20.02 0.20
500 9.60 455.85 0.32 0.09 20.10 0.13
TABLE 8. As in Table 7, but for salinity.
Standard
level (m)
Salinity at
standard
level
Pressure
(dbar)
OE RE
Mean
Std
dev Mean
Std
dev
10 34.48 8.47 20.01 0.02 0.00 0.01
20 34.53 18.13 20.01 0.01 0.00 0.01
40 34.61 36.04 20.02 0.03 0.00 0.02
100 35.11 87.90 20.07 0.16 0.03 0.21
JULY 2010 UEK I ET AL . 1205
Unauthenticated | Downloaded 12/25/21 10:26 AM UTC

and maximum pressure values observed in 14 months.
As shown in these profiles, the vertical shifts of each
sensor produced a mismatch between the target depth
and the realistic depth, especially at deeper levels. In
addition to the deeper levels, this mismatch might pro-
duce misleading observed data at the depth of large
vertical gradient levels, such as near the thermocline
and halocline.
As shown in the previous section, the vertical shifts of
the sensors installed from near the sea surface to 60 m
were small; therefore, the test is concentrated on the
sensors installed 80 m and below. In addition to the
evaluation of the reconstruction method, we calculated
the errors defined as original errors (OEs), which were
caused bymisleading data if we considered the observed
data at the virtual observed levels as the standard-level
data without any correction. Results from this calcula-
tion demonstrated the need for data reconstruction.
In the case of having values of a 14-monthmeanminus
standard deviation as the virtual observed pressures, the
largest slack-line effect on the temperature data was
recognized at the standard level of 120 m, whereas
the largest upward shift appeared on the sensor in-
stalled at 510 m (Table 5). In the case of temperature,
the OEs of the mean and standard deviation of the
15 CTD casts were 0.878 and 0.988C, The largest slack-
line effect on the salinity data appeared at the standard
level of 100 m, and the OEs of the mean and standard
deviation of the 15 CTD casts at the level were 20.01
and 0.03. The reconstruction errors (REs) derived
from the comparison between the reconstructed and
the real data are also listed in Table 5. The REs were
relatively small against the OEs. The largest value of
REs for the mean and standard deviation of the 15 CTD
casts in the case of temperature at the standard level of
120 m were 0.348 and 0.768C. The largest value of REs
for the mean and standard deviation of the 15 CTD
casts in the case of salinity at the standard level of 100 m
were 0.00 and 0.03, which were small and comparable
to OEs.
FIG. 10. Time–depth diagram of temperature observed with (a) m-TRITON and (b) TRITON
moorings.
1206 JOURNAL OF ATMOSPHER IC AND OCEAN IC TECHNOLOGY VOLUME 27
Unauthenticated | Downloaded 12/25/21 10:26 AM UTC

The test where the values of the 14-month mean plus
standard deviation was considered to be the virtual ob-
served pressures represented an almost standing condi-
tion of mooring; therefore, only two sensors installed at
310 and 510 m largely departed from the standard level.
It should be noted that these sensors are installed at the
depth of 10 m below the standard level to reduce slack-
line effect for temperature data. In this case, the largest
value of the OEs for the mean and standard deviation of
the 15 CTD casts appeared at the standard level of
300 m, and the values were20.158 and 0.098C (Table 6).
The values of REs for the mean and standard deviation
of the 15 CTD casts for this level were relatively small
(0.008 and 0.138C), which is the same as in the previous
case.
The most prominent case for the slack-line effect
appeared in the case with the minimum values of ob-
served pressure within 14 months served as the virtual
observed pressure. In the case of temperature, the largest
value of the OEs for the mean and standard deviation of
the 15 CTD casts was recognized at the standard level of
120 m, as in the first case. However, these values were
relatively large (5.748 and 3.428C; Table 7). In addition
to these largest values, relatively large values of the OEs
for the mean and standard deviation of the 15 CTD casts
appeared below the standard level of 60 m. The values
of REs for the mean and standard deviation of the
15 CTD casts at the standard level of 120 m were20.068and 0.218C, and the largest values of 0.198C for the mean
of the 15 CTD casts appeared at the standard level of
200 m. In the case of salinity, the OEs for the mean of
the 15 CTD casts at all standard levels were less than
20.01 (Table 8), and the smallest value of 20.07 with
a standard deviation of 0.16 was observed at the stan-
dard level of 100 m. Although the REs were relatively
small compared with those of OEs, as shown in the case
of temperature, the largest value of 0.03 for the mean
of the 15 CTD casts and that of 0.21 for the standard
FIG. 11. Time series of temperature observed with (a) m-TRITON and (b) TRITON
moorings at 40 m, and (c) its difference (m-TRITON temperature minus TRITON tempera-
ture). (d) Low-pass-filtered (25-h running mean) difference is also indicated. The observed
temperature is reconstructed into standard-level data.
JULY 2010 UEK I ET AL . 1207
Unauthenticated | Downloaded 12/25/21 10:26 AM UTC

deviation at the standard level of 100 m suggested a
difficulty in the reconstruction for the bottom level when
the slack-line effect was significant.
As shown in the results from the virtual test, OEs at
the standard level near the thermocline and halocline
increased. This result indicates a need for the data re-
construction of the standard-level data. On the other
hand, REs were relatively small even near the thermo-
cline and halocline. The maximum value of RE (0.168C)near the thermocline, corresponding to 80 m with the
minimum values of observed pressure within 14 months,
was less than the observation error (1.108C) estimated
from the pressure sensor accuracy. In the case of salinity,
the maximum value of RE (0.03) at the standard level of
100 m with the minimum values of observed pressure
within 14 months was equivalent to the observation
error (0.05).
6. Data comparison between two types of mooringsystems
When the slack-line mooring method was adopted for
the m-TRITON buoy, relatively large vertical shifts of
the installed sensors were coincident with the down-
sizing of the total mooring system. However, they could
be reduced by using an appropriate procedure, as dem-
onstrated in the previous section. In this section, we
confirm the data consistency between different mooring
methods through the field experiment described in sec-
tion 3. We have to pay attention to the difference in the
observation levels between the both moorings in the
data comparison. It should be noted that the recon-
structed m-TRITON data is used for this analysis.
In general, temporal variations in the vertical struc-
ture for temperature at both sites show almost the same
features, especially thermocline variation; however, there
are notable differences in the detailed structure, such
as mixed layer thickness (Fig. 10). To clarify the details,
we attempted a time series comparison between both
the buoys in three classified ranges: in the mixed layer
(40 m), in the thermocline (100 m), and below the ther-
mocline (300 m). It should be noted that the TRITON
temperature at 40 m was reconstructed by using the
Akima spline method because of the lack of observation
data at this depth. The available data for comparison
were acquired within almost 6 months from 5December
2006 to 16 June 2007.
At the depth of 40 m, themean difference (m-TRITON
minus TRITON) and root-mean-square (RMS) differ-
ence for temperature were 0.128 and 0.528C (Fig. 11).
The RMS difference decreased when we used a 25-h
running-mean filter as a low-pass filter, which suggested
an effect of a spatial phase difference in high-frequency
signals caused by a distance of 8 n mi between the two
buoys. The difference increased as the m-TRITON tem-
perature was higher than the TRITON temperature
in the middle of January and from February to March
2007 when the temperature rapidly decreased. It was
suggested from the time–depth diagram of the temper-
ature observed with both the moorings (Fig. 12) that the
difference was caused by a difference in the vertical res-
olution of the observation levels. The TRITON mooring
could not capture a detailed structure of the surface
mixed layer, especially near the bottom, which appeared
from 40 to 60 m.
At the depth of 100 m, the mean difference and
RMS difference in temperature were20.168 and 0.588C(Fig. 13). The m-TRITON temperature was relatively
lower than the TRITON temperature until the end of
February 2007, and then the difference decreased until
the beginning of April 2007. The amplitude of the dif-
ference increased after the beginning of April 2007.
This depth corresponds to the thermocline layer on av-
erage; therefore, the temperature variation was probably
affected by ocean dynamics forced by the sea surface
wind.
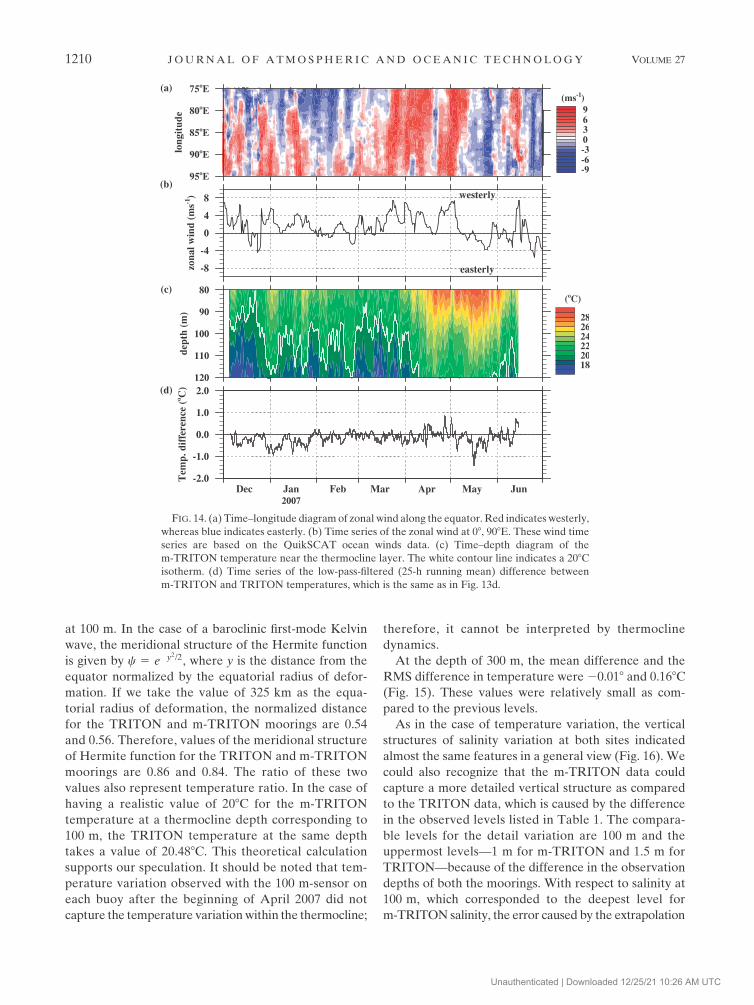
The time series of the equatorial zonal wind with the
time–depth diagram of temperature acquired with the
m-TRITON buoy is shown in Fig. 14. If we considered
a 208C isotherm as an index for thermocline variation, it
FIG. 12. Time–depth diagram of the upper-layer temperature
observed with (a) m-TRITON and (b) TRITON moorings from
Feb to Mar 2007. The closed circles indicate nominal observed
levels.
1208 JOURNAL OF ATMOSPHER IC AND OCEAN IC TECHNOLOGY VOLUME 27
Unauthenticated | Downloaded 12/25/21 10:26 AM UTC

is seen that the thermocline depth changed considerably
until the end of February 2007, and it was then located
around 100 m until the first half of April 2007. The de-
velopment of themixed layer was found after themiddle
of April 2007, and the sensor installed around 100-m
depth captured the temperature variation within the
mixed layer. With respect to the wind variation, basi-
cally, westerly winds were dominant in the equatorial
region at 908E. For the spatial property of winds, the
zonal scales of thewesterly windswidened duringMarch–
April 2007. With respect to the time scale of wind varia-
tion, intraseasonal signals were recognized through the
entire observation period.
The oceanic response against the local westerly wind
near the equator was the Ekman transport to the equator
and the deepening of the thermocline. The relationship
between the observed vertical motion of the thermo-
cline and the zonal wind variation near the buoy position
was consistent until the end of February 2007—when
the westerly was dominant, the thermocline deepened.
However, the relationship become inconsistent from the
end of February to the middle of April 2007—vertical
motions of the thermocline became small, whereas the
local wind variation was not so different 1 month before.
This feature might be concerned with the upwelling
Kelvin waves exited by the easterly wind at the far-west
region around 758E. After the middle of April 2007, the
westerly had a large zonal scale; therefore, in addition
to the local wind, the downwelling Kelvin waves exited
by the westerly wind in the far-west region might sup-
port the remarkable deepening of the thermocline at the
observed site.
A large temperature difference between both the
buoys appeared until the end of February 2007 when
the thermocline was located between 80 and 120 m and
became relatively deeper, suggesting effects of the
westerly wind forcing.When the westerly was dominant,
the downwelling Kelvin waves exited near the equator.
Therefore, the influence of the downwelling was more
effective on the northern TRITON buoy as compared to
the southern m-TRITON buoy; the TRITON tempera-
ture became higher than the m-TRITON temperature
FIG. 13. As in Fig. 11, but for 100 m.
JULY 2010 UEK I ET AL . 1209
Unauthenticated | Downloaded 12/25/21 10:26 AM UTC
at 100 m. In the case of a baroclinic first-mode Kelvin
wave, the meridional structure of the Hermite function
is given by c 5 e�y2/2, where y is the distance from the
equator normalized by the equatorial radius of defor-
mation. If we take the value of 325 km as the equa-
torial radius of deformation, the normalized distance
for the TRITON and m-TRITON moorings are 0.54
and 0.56. Therefore, values of the meridional structure
of Hermite function for the TRITON and m-TRITON
moorings are 0.86 and 0.84. The ratio of these two
values also represent temperature ratio. In the case of
having a realistic value of 208C for the m-TRITON
temperature at a thermocline depth corresponding to
100 m, the TRITON temperature at the same depth
takes a value of 20.488C. This theoretical calculation
supports our speculation. It should be noted that tem-
perature variation observed with the 100 m-sensor on
each buoy after the beginning of April 2007 did not
capture the temperature variationwithin the thermocline;
therefore, it cannot be interpreted by thermocline
dynamics.
At the depth of 300 m, the mean difference and the
RMS difference in temperature were20.018 and 0.168C(Fig. 15). These values were relatively small as com-
pared to the previous levels.
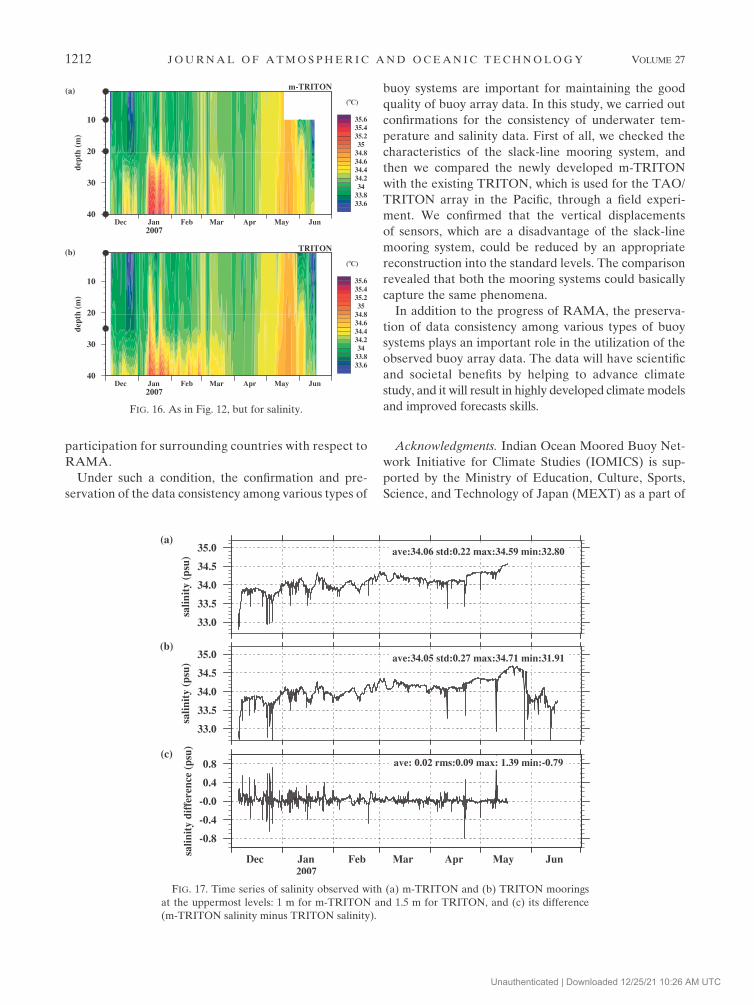
As in the case of temperature variation, the vertical
structures of salinity variation at both sites indicated
almost the same features in a general view (Fig. 16). We
could also recognize that the m-TRITON data could
capture a more detailed vertical structure as compared
to the TRITON data, which is caused by the difference
in the observed levels listed in Table 1. The compara-
ble levels for the detail variation are 100 m and the
uppermost levels—1 m for m-TRITON and 1.5 m for
TRITON—because of the difference in the observation
depths of both the moorings. With respect to salinity at
100 m, which corresponded to the deepest level for
m-TRITON salinity, the error caused by the extrapolation
FIG. 14. (a) Time–longitude diagramof zonal wind along the equator. Red indicates westerly,
whereas blue indicates easterly. (b) Time series of the zonal wind at 08, 908E. These wind time
series are based on the QuikSCAT ocean winds data. (c) Time–depth diagram of the
m-TRITON temperature near the thermocline layer. The white contour line indicates a 208Cisotherm. (d) Time series of the low-pass-filtered (25-h running mean) difference between
m-TRITON and TRITON temperatures, which is the same as in Fig. 13d.
1210 JOURNAL OF ATMOSPHER IC AND OCEAN IC TECHNOLOGY VOLUME 27
Unauthenticated | Downloaded 12/25/21 10:26 AM UTC

for the reconstruction of standard-level data increased
when the mooring system was declined. Therefore, we
paid attention to buoy behavior for the comparison.
At the depth of the uppermost levels, the mean dif-
ference and RMS difference in salinity were 0.02 and
0.09 (Fig. 17). The spatial and temporal small scales of
the low surface salinity patch distribution, which was ob-
served in the Pacific warm pool by Soloviev and Lukas
(1996), might reflect this small mean difference and the
relatively large RMS difference.
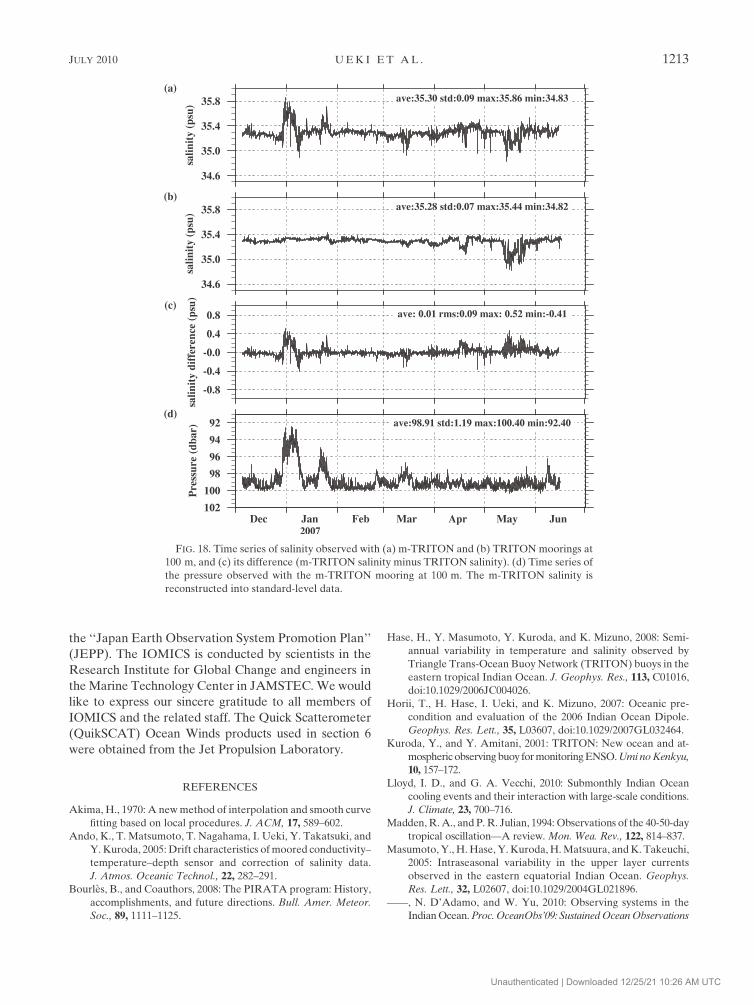
At the depth of 100 m, the mean difference and RMS
difference in salinity were 0.01 and 0.09 (Fig. 18). These
values were not so different from those in the uppermost
levels. However, there were some eventual signals as-
sociated with the pressure variation of the m-TRITON
sensor. These signals were caused by the data reconstruc-
tion method described in section 5 and produced an arti-
ficial error. Therefore, the actual RMS difference might
be reduced.
As described earlier, both buoys basically captured
the same signals, and it was suggested that the observed
differences were produced by the differences in the
mooring points and observation depths.
7. Concluding remarks
The progress of RAMA for understanding large-scale
ocean–atmosphere interaction phenomena, such as IOD
events, ocean dynamics, and climate variability in the
Indian Ocean, has been accelerated in the past 5 yr. A
fully developed RAMA will contribute to climate study
and operational activities for weather and climate fore-
casts, but it is still in the developing stage. To promote
the completion of RAMA, we developed a new slack-
line mooring buoy system, which facilitates the down-
sizing of the complete system for the purpose of easy
handling during operation. Because a multinational
effort is required for the progress of RAMA, the in-
stallation of various types of buoy systems are ex-
pected. Our new buoy system can become one such
system. Because this downsized system allows us to
select from a wide range of vessels, it leads to easy
FIG. 15. As in Fig. 11, but for 300 m.
JULY 2010 UEK I ET AL . 1211
Unauthenticated | Downloaded 12/25/21 10:26 AM UTC
participation for surrounding countries with respect to
RAMA.
Under such a condition, the confirmation and pre-
servation of the data consistency among various types of
buoy systems are important for maintaining the good
quality of buoy array data. In this study, we carried out
confirmations for the consistency of underwater tem-
perature and salinity data. First of all, we checked the
characteristics of the slack-line mooring system, and
then we compared the newly developed m-TRITON
with the existing TRITON, which is used for the TAO/
TRITON array in the Pacific, through a field experi-
ment. We confirmed that the vertical displacements
of sensors, which are a disadvantage of the slack-line
mooring system, could be reduced by an appropriate
reconstruction into the standard levels. The comparison
revealed that both the mooring systems could basically
capture the same phenomena.
In addition to the progress of RAMA, the preserva-
tion of data consistency among various types of buoy
systems plays an important role in the utilization of the
observed buoy array data. The data will have scientific
and societal benefits by helping to advance climate
study, and it will result in highly developed climatemodels
and improved forecasts skills.
Acknowledgments. Indian Ocean Moored Buoy Net-
work Initiative for Climate Studies (IOMICS) is sup-
ported by the Ministry of Education, Culture, Sports,
Science, and Technology of Japan (MEXT) as a part of
FIG. 16. As in Fig. 12, but for salinity.
FIG. 17. Time series of salinity observed with (a) m-TRITON and (b) TRITON moorings
at the uppermost levels: 1 m for m-TRITON and 1.5 m for TRITON, and (c) its difference
(m-TRITON salinity minus TRITON salinity).
1212 JOURNAL OF ATMOSPHER IC AND OCEAN IC TECHNOLOGY VOLUME 27
Unauthenticated | Downloaded 12/25/21 10:26 AM UTC
the ‘‘Japan Earth Observation System Promotion Plan’’
(JEPP). The IOMICS is conducted by scientists in the
Research Institute for Global Change and engineers in
the Marine Technology Center in JAMSTEC. We would
like to express our sincere gratitude to all members of
IOMICS and the related staff. The Quick Scatterometer
(QuikSCAT) Ocean Winds products used in section 6
were obtained from the Jet Propulsion Laboratory.
REFERENCES
Akima, H., 1970: A newmethod of interpolation and smooth curve
fitting based on local procedures. J. ACM, 17, 589–602.Ando, K., T. Matsumoto, T. Nagahama, I. Ueki, Y. Takatsuki, and
Y.Kuroda, 2005: Drift characteristics ofmoored conductivity–
temperature–depth sensor and correction of salinity data.
J. Atmos. Oceanic Technol., 22, 282–291.Bourles, B., and Coauthors, 2008: The PIRATA program: History,
accomplishments, and future directions. Bull. Amer. Meteor.
Soc., 89, 1111–1125.
Hase, H., Y. Masumoto, Y. Kuroda, and K. Mizuno, 2008: Semi-
annual variability in temperature and salinity observed by
Triangle Trans-Ocean Buoy Network (TRITON) buoys in the
eastern tropical Indian Ocean. J. Geophys. Res., 113, C01016,
doi:10.1029/2006JC004026.
Horii, T., H. Hase, I. Ueki, and K. Mizuno, 2007: Oceanic pre-
condition and evaluation of the 2006 Indian Ocean Dipole.
Geophys. Res. Lett., 35, L03607, doi:10.1029/2007GL032464.
Kuroda, Y., and Y. Amitani, 2001: TRITON: New ocean and at-
mospheric observingbuoy formonitoringENSO.UminoKenkyu,
10, 157–172.
Lloyd, I. D., and G. A. Vecchi, 2010: Submonthly Indian Ocean
cooling events and their interaction with large-scale conditions.
J. Climate, 23, 700–716.Madden,R.A., and P. R. Julian, 1994: Observations of the 40-50-day
tropical oscillation—A review. Mon. Wea. Rev., 122, 814–837.
Masumoto,Y., H.Hase,Y.Kuroda,H.Matsuura, andK. Takeuchi,
2005: Intraseasonal variability in the upper layer currents
observed in the eastern equatorial Indian Ocean. Geophys.
Res. Lett., 32, L02607, doi:10.1029/2004GL021896.
——, N. D’Adamo, and W. Yu, 2010: Observing systems in the
IndianOcean.Proc.OceanObs’09: SustainedOceanObservations
FIG. 18. Time series of salinity observed with (a) m-TRITON and (b) TRITONmoorings at
100 m, and (c) its difference (m-TRITON salinity minus TRITON salinity). (d) Time series of
the pressure observed with the m-TRITON mooring at 100 m. The m-TRITON salinity is
reconstructed into standard-level data.
JULY 2010 UEK I ET AL . 1213
Unauthenticated | Downloaded 12/25/21 10:26 AM UTC

and Information for Society, Vol. 2, J. Hall, D. E. Harrison,
and D. Stammer, Eds., Venice, Italy, European Space Agency,
WPP-306.
McPhaden, M. J., and Coauthors, 1998: The tropical ocean-global
atmosphere observing system: A decade of progress. J. Geo-
phys. Res., 103, 14 169–14 240.
——, Y. Kuroda, and V. S. N. Murty, 2006: Development of an
Indian Ocean moored buoy array for climate studies. CLIVAR
Exchanges, No. 11, International CLIVAR Project Office,
Southampton, United Kingdom, 3–5.
——, and Coauthors, 2009: RAMA: The research moored Array
for African–Asian–Australian Monsoon analysis and pre-
diction. Bull. Amer. Meteor. Soc., 90, 459–480.
Meyers, G., and R. Boscolo, 2006: The Indian Ocean Observing
System (IndOOS).CLIVAR Exchanges,No. 11, International
CLIVARProjectOffice, Southampton, UnitedKingdom, 2–3.
Murty, V. S. N., and Coauthors, 2006: Indian Moorings: Deep-sea
current-meter moorings in the eastern equatorial Indian
Ocean. CLIVAR Exchanges, No. 11, International CLIVAR
Project Office, Southampton, United Kingdom, 5–8.
Saji, N. H., B. N. Goswami, P. N. Vinayachandran, and T. Yamagata,
1999: A dipole mode in the tropical Indian Ocean. Nature, 401,
360–363.
Sengupta, D., R. Senan, V. S. N. Murty, and V. Fernando, 2004: A
biweekly mode in the equatorial Indian Ocean. J. Geophys.
Res., 109, C10003, doi:10.1029/2004JC002329.
Servain, J., A. J. Busalacchi, M. J. McPhaden, A. D. Moura,
G. Reverdin, M. Vianna, and S. E. Zebiak, 1998: A Pilot
Research Moored Array in the Tropical Atlantic (PIRATA).
Bull. Amer. Meteor. Soc., 79, 2019–2031.
Soloviev, A., and R. Lukas, 1996: Observation of spatial variability
of diurnal thermocline and rain-formed halocline in the west-
ern Pacific warm pool. J. Phys. Oceanogr., 26, 2529–2538.
Webster, P. J., V.Magana, T. Palmer, J. Shukla,R. Tomas,M.Yanai,
and T. Yasunari, 1998: Monsoons: Processes, predictability, and
the prospects for prediction. J. Geophys. Res., 103, 14 451–
14 510.
——, A. M. Moore, J. P. Loschnigg, and R. R. Lebben, 1999: Cou-
pled ocean–atmosphere dynamics in the Indian Ocean during
1997–98. Nature, 401, 356–360.
1214 JOURNAL OF ATMOSPHER IC AND OCEAN IC TECHNOLOGY VOLUME 27
Unauthenticated | Downloaded 12/25/21 10:26 AM UTC


















