
D A I-II - ITU AVIATION INSTITUTE Main Pageaviation.itu.edu.tr/img/aviation/datafiles/Lecture...
83
D ATA A NALYTICS IN AIR TRANSPORTATION SYSTEMS I - II DR . EMRE KOYUNCU (I STANBUL T ECHNICAL U NIVERSITY ) Advanced Information Systems Module 5-9 : 1-6 June 2015 Istanbul Technical University Air Transportation Management M.Sc. Program
Transcript of D A I-II - ITU AVIATION INSTITUTE Main Pageaviation.itu.edu.tr/img/aviation/datafiles/Lecture...
DATA ANALYTICS IN AIR TRANSPORTATION SYSTEMS I-II
DR EMRE KOYUNCU (ISTANBUL TECHNICAL UNIVERSITY)
Advanced Information Systems
Module 5-9 1-6 June 2015
Istanbul Technical University
Air Transportation Management
MSc Program
LEARNING OBJECTIVES
bull Data Analytics in AT
ndash TBO Flight Operation case
ndash Flight Incidents case
ndash FDM based flight performance analysis
ndash Delay Propagation in ATM Network
TRAJECTORY BASED-OPERATIONS (TBO)
bull A New ATM Paradigm Trajectory Based-Operations (TBO)
- Key feature of the target concept of operations proposed by SESAR and NextGen
- Collaborative management of business trajectories supported by advanced trajectory-based
automation tools
- Trajectory-based automation tools rely on trajectory prediction
- To support the interoperability between disparate trajectory-based automation tools
there is a need for mechanisms to synchronise Trajectory Predictors (TPs)
- TP synchronisation is a key prerequisite for the SESARNext Gen concepts
- The REACT project has focused on one of the types of information that can be
shared between TPs to achieve synchronisation the Aircraft Intent
A BIT OF TERMINOLOGY
bull Business Trajectory
ndash Represents the businessmission intention of an airspace user
ndash Evolves through a collaborative planning process that involves users and ATM service providers and whose outcome should be a trajectory that results in minimum deviations from the user preferences
bull Interoperability is a property referring to the ability of diverse systems to work together (inter-operate)
bull A key necessary condition for the interoperability of trajectory-based automation tools is the synchronisation of the underlying TPs
bull The synchronisation of two TPs results in a minimally acceptable difference between the trajectory outputs of those TPs (this minimally acceptable difference depends on the applications supported by the TPs)
5
TOWARDS TRAJECTORY BASED OPERATIONS (TBO)
City B
AOC1
AOC2
ANSP1
ANSP2
ANSP3
ANSP4
ANSP1
BUSINESS TRAJECTORIES
ANSP= Air Navigation Service Provider
AOC= Airline Operations Centre
6
TOWARDS TBO INTEROPERABILITY AND TP SYNCHRONISATION
TRAJECTORY RELATED
INFORMATION
AOC1
AOC2
ANSP1
ANSP2
ANSP3
ANSP1
ANSP4
7
TRAJECTORY RELATED
INFORMATION
TOWARDS TBO INTEROPERABILITY AND TP SYNCHRONISATION
TP2
TPI
TP1
TPP
TP6
TPN
TP3
TPR
TP4
TPK
TP5
TPL
TPH
CDampR
ASAS
FMS
AMANFDPS
FMS
FMS
ATFM
AMAN= Arrival manager
DMAN= Departure manager
FMS= Flight Management System
FP=Flight Planning
ASAS=Airborne Separation Assurance System
ATFM=Air Traffic Flow Management
FDPS=Flight Data Processing Tool
CDampR=Conflict Detection and Resolution
Actual aircraft state
(position speed
weighthellip)
MORE TERMINOLOGY TRAJECTORY-RELATED INFORMATION
Environmental
Conditions
Pilot
Real World
Trajectory Prediction (Air or Ground)
Flight Commands
amp Guidance
Modes
Flight
Intent
Flight
Plan
Tactical
Amendments to
Flight Plan
Airborne
Automation
System
Actual
Trajectory
Aircraft
Predicted
Trajectory
Trajectory
Computation
Infrastructure
Aircraft
Intent
Intent
Generation
Infrastructure
Initial
Conditions
Trajectory Predictor (TP)
AT or ABOVE FL290
SHARING TRAJECTORY-RELATED INFORMATION
Data COM InfrastructurePredicted trajectory
information
Flight
Intent
Airborne
Predicted
Trajectory
TP PROCESS 2 (eg arrival manager)
Flight
Intent
Ground
Predicted
Trajectory
Trajectory
Computation
Infrastructure
(1)
Aircraft
Intent
Intent
Generation
Infrastructure
(1)
Airborne TP
Trajectory
Computation
Infrastructure
(2)
Aircraft
Intent
Intent
Generation
Infrastructure
(2)
Ground TP
Aircraft Intent
information
Flight Intent
Information
Trajectory Prediction (eg flight management system)
bull Two levels in the language grammar lexical and syntactical
bull Lexical Level Instructions
ndash Instructions are atomic inputs to the Trajectory Engine that capture basic
commands and guidance modes at the disposal of the pilotFMS to direct the
operation of the aircraft
bull Syntactical level Operations
ndash Operations are sets of compatible instructions that when simultaneously active
univocally determine the ensuing aircraft motion
bull With a reduced set of instructions (AIDL alphabet) any possible aircraft
operation can be formally specified in such a way that the ensuing aircraft
motion is unambiguously determined
SHARING TRAJECTORY-RELATED INFORMATION
11
Next generation
FMS
AOC 2
ATFM DST
FMS
AOC 1
FDPS
AMAN DST
Next
Generation
FDPS
Air-Air
Air-Ground
Ground-Ground
SHARING TRAJECTORY-RELATED INFORMATION
12
TRAJECTORY RELATED INFORMATION
AIRCRAFT INTENT
TP2
TPI
TPP
TPR
TPK
TP5
TPL
TPH
Translator
I-5
Translator
R-5
Translator
2-K
Translator
R-2
Translator
2-5
Translator
I-2
Translator
H-5
Translator
R-P
N (N-1) divide 2TRANSLATORS
Translator
K-P
Translator
5-K
Translator
I-R
Translator
5-P
Translator
L-5
Translator
I-H
Translator
H-L
Translator
R-K
Translator
L-P
SHARING TRAJECTORY-RELATED INFORMATION
13
TP2
TPI
TPP
TPR
TPK
TP5
TPL
TPH
Translator
L-AIDL
AIDL
Translator
5-AIDL
Translator
P-AIDL
Translator
K-AIDL
Translator
R-AIDL
Translator
2-AIDL
Translator
H-AIDL
Translator
I-AIDL
N TRANSLATORS
SHARING TRAJECTORY-RELATED INFORMATION
externalinternal
Constraints amp
Rules
Aeronautical
Nav Data
Weather
Data
Basic Flight
Data amp
Schedule
Route Type amp
Optimization
Settings
Aircraft
Performance
Data
Business Rules
euroFlight
Number
City Pair
Alternate
ADES
DOF STD
Fuel Policy AC Type
AC
Equipment
AC
Envelope
Payload
Payload -
Range
Wind
Condition
Air Pressure
Air Temp
Natural
Hazards
Stat Dyn
Routes
Fix Free
Route
Opt Criteria
Cost Index
Traffic
Rights
RNAV Rules
NOTAM
TFR
(eg RAD)
Terrain
Clearance
Terminal
Procedures
DCT
Connection
Airport
Definition
Flight
connectivity
Human Req
Time Costs
Business
Targets
Business
Constraints
Conditional
Routes
DATA TYPES
bull METARTAF
LTBA 312020Z 05006KT 030V100 CAVOK 1908 Q1018 NOSIG
TAF LTBA 311640Z 31180124 03009KT CAVOK
BECMG 01030106 SCT035
TEMPO 01080112 04015G25KT
BECMG 01140116 CAVOK
Weather
Data
METAR EXPLAINED
KTTN 051853Z 04011KT 12SM VCTS SN FZFG BKN003 OVC010 M02M02 A3006 RMK AO2 TSB40
SLP176 P0002 T10171017
bull KTTN is the ICAO identifier for the Trenton-Mercer Airport
bull 051853Z indicates the day of the month is the 5th and the time of day is 1853 ZuluUTC 653PM GMT
or 153PM Eastern Standard Time
bull 04011KT indicates the wind is from 040deg true (north east) at 11 knots (20 kmh 13 mph) In the United
States the wind direction must have a 60deg or greater variance for variable wind direction to be reported
and the wind speed must be greater than 3 knots (56 kmh 35 mph)
bull 12SM indicates the prevailing visibility is 1frasl2 mi (800 m) SM = statute mile
bull VCTS indicates a thunderstorm (TS) in the vicinity (VC) which means from 5ndash10 mi (8ndash16 km)
bull SN indicates snow is falling at a moderate intensity a preceding plus or minus sign (+-) indicates heavy
or light precipitation Without a +- sign moderate precipitation is assumed
bull FZFG indicates the presence of freezing fog
bull BKN003 OVC010 indicates a broken (58 to 78 of the sky covered) cloud layer at 300 ft (91 m) above
ground level (AGL) and an overcast (88 of the sky covered) layer at 1000 ft (300 m)
bull M02M02 indicates the temperature is minus2degC (28degF) and the dewpoint is minus2degC (28degF) An M in
front of the number indicates that the temperaturedew point is minus ie below zero (0) Celsius
bull A3006 indicates the altimeter setting is 3006 inHg (1018 hPa)
bull RMK indicates the remarks section follows
DATA TYPES
bull Aeronautical Information Manual (AIM)
ndash SID and STAR Taxi charts
Aeronautical
Nav Data
SID
STAR
DATA TYPES
bull Airspace rules
ndash Eg seperation
Constraints amp
Rules
DATA TYPES
bull Cost Index
bull Airline (User) preferred routes
ndash User Preferences Model (UPM)
Route Type amp
Optimization
Settings
COST DEFINITION
COST INDEX EXAMPLE
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
INPUTS
bull Initial conditions (IC)
bull Flight Intent (FI)
bull User Preferences Model (UPM)
ndash ie airline policy
bull Operational Context Model (OCM)
ndash rules of airpace including
STARs and SIDs
bull ie ATFM policy
ndash Aircraft Performance Model
(APM)
bull Based on BADA
ndash Weather Model (WM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Flight Intent with User Preferences Model (UPM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull FI with UPM and Operational Context Model (OCM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory with details
DATA TYPES
bull Flight Plan
bull Regulated Flight Plan
bull Actual Flight data (Current Tactical)
bull Correlated Position data
bull CDM related data
Basic Flight
Data amp
Schedule
4D TRAJECTORY DATA PROFILES
LIPEEDFMJMP803JMPD22820110301031200BB9377945220110301031500FPLFPLAFPNEXENEXENNN2011030103150020110301031500TEFINS783849NNN00ACHN
NNN600300N00N0NDCULTNRSNNK00344154791F160N0234019032500LIPELUPOS5N10A443151N0111749EY
032955DCT7518V443121N0110416E32Y 033515DCT15038V443048N0104912E67Y 033640DCT16043V443040N0104526E75Y
033830LUPOSL99516057W443017N0103453EY 034355PARL99516099N444920N0101736EY 034735MISPOL995160127W450126N0100450EY
035305BEKANL995160169W451930N0094540EY 035720TZOL995160202N453333N0093026EY 040450PEPAGN851160260W455902N0090417EY
040730ABESIN851160280W460935N0090234EY 041350PIXOSN851160329W463619N0085859EY 041800SOPERN851160361W465322N0085640EY
042155ELMURN851160391W470924N0085427EY 042350ROLSAN851160406W471723N0085321EY 042705KUDESDCT160431W473115N0085126EN
044840DCT160597V490001N0083550E76N 045435DCT75623V491355N0083323E88N
050205EDFM3650A492821N0083051EN23032500LI040545NAS443151N0111749E460244N0090341E11600267
032500LIMMFIR040545FIR443151N0111749E460244N0090341E11600267 032500LIPECR033115ES443151N0111749E443113N0110030E194023
032500LIPECTR033115AUA443151N0111749E443113N0110030E194023 033115LIPPADS033735ES443113N0110030E443029N0104009E941602350
033115LIPPC1X033735ES443113N0110030E443029N0104009E941602350 033115LIPPCTA033735AUA443113N0110030E443029N0104009E941602350
033735LIMMECTA034805AUA443029N0104009E450310N0100300E16016050131 033735LIMMES1034805ES443029N0104009E450310N0100300E16016050131
033735LIMMES1X034805ES443029N0104009E450310N0100300E16016050131 034635LIMMR60041420ES445759N0100829E463827N0085842E160160119333
034805LIMMACTA040730AUA450310N0100300E460935N0090234E160160131280 034805LIMMADE035640ES450310N0100300E453126N0093244E160160131197
035640LIMMANE040730ES453126N0093244E460935N0090234E160160197280 040545LS042705NAS460244N0090341E473115N0085126E160160267431
040545LSASFIR042705FIR460244N0090341E473115N0085126E160160267431 040730LSAZCTA042705AUA460935N0090234E473115N0085126E160160280431
040730LSAZSSL042420ES460935N0090234E471936N0085303E160160280410 041545LSTSA50P042020CRSA464419N0085754E470300N0085520E160160344379
041545LSTSA52P041620ERSA464419N0085754E464627N0085736E160160344348 041620LSTSA51P042020ERSA464627N0085736E470300N0085520E160160348379
042020LSTSA40P042115ERSA470300N0085520E470644N0085449E160160379386
042420LSAZESL042705ES471936N0085303E473115N0085126E1601604104310344157065F160N02340 F140N023493 F160N023498 F150N0234390
F100N023439778032200LIPELUPOS5N10A443151N0111749EY 032540DCT6014V443128N0110716E25Y 032730DCT6022V443115N0110115E39Y
032800DCT6824V443111N0105944E42Y 032830DCT7027V443106N0105729E47Y 032845DCT7528V443105N0105644E49Y 032855DCT7829V443103N0105558E51Y
032910DCT8030V443102N0105513E53Y 032925DCT8032V443058N0105343E56Y 032955DCT8834V443055N0105212E60Y 033035DCT10037V443050N0104957E65Y
033040DCT10038V443048N0104912E67Y 033050DCT10439V443047N0104826E68Y 033110DCT10640V443045N0104741E70Y 033150DCT10644V443038N0104441E77Y
033155DCT11045V443037N0104355E79Y 033215LUPOSL99511057W443017N0103453EY 033240DCT11071V443638N0102907E33Y
033245DCT11472V443705N0102843E36Y 033310DCT12074V443800N0102753E40Y 033335DCT12078V443948N0102615E50Y 033345DCT12479V444016N0102550E52Y
033410DCT12880V444043N0102525E55Y 033445DCT12883V444205N0102411E62Y 033500DCT13084V444232N0102346E64Y 033515DCT13087V444353N0102232E71Y
033540DCT13789V444448N0102143E76Y 033600DCT14090V444515N0102118E79Y 033620DCT14092V444609N0102029E83Y 033640DCT14493V444637N0102004E86Y
033700DCT14094V444704N0101939E88Y 033740DCT14098V444853N0101801E98Y 033755PARL99514499N444920N0101736EY
034015DCT144120V445825N0100802E75Y 034110MISPOL995145127W450126N0100450EY 034200DCT145134V450427N0100138E17Y
034215DCT150135V450452N0100111E19Y 034250DCT150140V450702N0095854E31Y 034325DCT154142V450753N0095759E36Y
034405DCT160145V450911N0095637E43Y 034425DCT160148V451028N0095515E50Y 034520DCT160155V451329N0095203E67Y
034625DCT160162V451629N0094852E83Y 034720BEKANL995160169W451930N0094540EY 035145TZOL995160202N453333N0093026EY
035700DCT160242V455107N0091224E69Y 035925PEPAGN851160260W455902N0090417EY 040205ABESIN851160280W460935N0090234EY
040715DCT160319V463052N0085943E80Y 040840PIXOSN851160329W463619N0085859EY 041315SOPERN851160361W465322N0085640EY
041720DCT160390V470852N0085431E97Y 041730ELMURN851157391W470924N0085427EY 041755DCT150393V471028N0085418E13Y
041820DCT150397V471236N0085401E40Y 041920DCT150405V471651N0085325E93Y 041935ROLSAN851147406W471723N0085321EY
042000DCT140408V471830N0085312E8Y 042125DCT140419V472436N0085221E52Y 042205DCT140425V472755N0085154E76Y
042225DCT134427V472902N0085144E84Y 042240DCT130428V472935N0085140E88Y 042320KUDESN851121431W473115N0085126EN
042435DCT100437V473343N0085439E21N 042720ROMIRN851100459W474247N0090628EN 042825VEDOKN851100468W474724N0090714EN
042905TINOXDCT100473W475007N0090740EY 044335DCT100571G484048N0084511EY 045005DCT100607V485957N0083916E68Y
045040DCT94609V490101N0083856E72Y 045100DCT94611V490205N0083836E75Y 045140DCT84614V490341N0083807E81Y 045200DCT84616V490445N0083747E85Y
045240DCT74619V490620N0083717E91Y 045345INKAMDCT54624W490900N0083628EY 045655DCT54642V491820N0083258E56Y
045950DCT16656G492536N0083015EY 050110EDFM3661A492821N0083051EY39032200LI040020NAS443151N0111749E460244N0090341E11600267
032200LIMMFIR040020FIR443151N0111749E460244N0090341E11600267 032200LIPECR033020ES443151N0111749E443052N0105042E196036
032200LIPECTR033020AUA443151N0111749E443052N0105042E196036 033020LIPPADS033205ES443052N0105042E443029N0104009E961103650
033020LIPPC1X033205ES443052N0105042E443029N0104009E961103650 033020LIPPCTA033205AUA443052N0105042E443029N0104009E961103650
033205LIMMECTA034140AUA443029N0104009E450310N0100300E11014550131 033205LIMMES1034140ES443029N0104009E450310N0100300E11014550131
4D TRAJECTORY DATA PROFILES
Tactical flight Models
bull FTFM - Filed Tactical Flight Model The FTFM is the
ldquoinitialrdquo profile as it reflects the status of the demand before
activation of the regulation plan It is computed with the latest
flight plan version sent by each AO to the CFMUIFPS
bull RTFM - Regulated Tactical Flight Model The RTFM is the
ldquoregulatedrdquo profile as it reflects the status of the demand after
activation of the regulation plan It is computed with the latest
ATFM slot (CTOT) issued to the AO by the ground
regulation system
bull CTFM - Current Tactical Flight Model The CTFM is the
ldquoactualrdquo profile as it integrates the actual entry time of the
flights in the regulated TV It is computed with the Radar
Data sent by ACCs to CFMUETFMS ref
CPG_GEN - Profiles generated by the CFMU path generation
tool
bull SCR - Shortest Constrained Route
bull SRR - Shortest RAD restriction applied Route
bull SUR - Shortest Unconstrained Route
bull DCT - Direct route
CPF - Correlated Position reports for a Flight CPRs
(Correlated Position Reports) which are surveillance data
collected from the ACCs
Filed Flight Plan
CDM
Header
Point Profile
Airspace Profile
Circle Intersection
Profile
RTFM Profile
CTFM Profile
CFP Profile
FTFM Profile
4D TRAJECTORY DATA PROFILES
Current Tactical Flight Model (CTFM) is computed with Radar Data sent by
Area Control Centers to CFMUETFMS so it can be deemed as a fused
version of FTFM with real data
ENHANCED TACTICAL FLOW MANAGEMENT SYSTEM (ETFMS) EUROCONTROL 2013
DATA TYPES
bull Base of Aircraft Data (BADA) depending on ac type
ndash Nominal control variables (BADA 3)
ndash Full flight variable envelope (BADA 4)
bull optimization
Aircraft
Performance
Data
AIRCRAFT EQUATION OF MOTION
bull equation of motion sufficient in 3 dof
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
number of parameters of the system that may vary independently
BASE OF AIRCRAFT DATA (BADA)
bull There are two families of BADA APM based on the same modelling approach and components [EUROCONTROL]
bull BADA Family 3ndash providing a 90 coverage of the current aircraft types operating
in the ECAC airspace
ndash model aircraft behaviour over the normal operations part of the flight envelope and to meet todays requirements for aircraft performance modelling and simulation
bull BADA Family 4 ndash a newly developed model intended to meet advanced functional
and precision requirements of the new ATM systems
ndash providing a 60 coverage of the current aircraft types operating in ECAC airspace
ndash BADA 4 provides accurate modelling of aircraft over the entire flight envelope and enables modelling and simulation of advanced concepts of future systems
AIRCRAFT PERFORMANCE MODEL
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
BADA AIRCRAFT LIMITATION MODEL
DATA TYPES
bull Business objectives
ndash Cost Index
ndash User Preferences Model (UPM)
ndash Ground delays due to connectionshellip
Business Rules
euro
HORIZONTAL OPTIMISATION
TO_WPT FROM_WPT Cost
A
B
C
DEP
DEP
DEP
21
25
23
A
A
E
B
52
40
CG 45
B
B
E
F
49
53
G
G
F
J
73
79
E
E
K
H
84
75
F
F
H
I
70
67
I
I
L
M
96
85
HL 86
JM 119
KO 117
KL 109
MQ 115
LP 118
QDEST 134
OP 136
PDEST 130
Worklist
Dijkstra algorithm
DEPDEST
16
40
19
12
19
J
28
34
I14
17
O33
25
Q30
P32
F24
28
D
E
19
31
G22
A
B
C
2125
23
H
K
35
26 L
M18
29
1) Selection of segments for current from- waypoint
2) Calculation of costs for selected segments
3) Entering calculated datasets into worklist
4) Selection of best dataset from worklist
5) To- waypoint of best dataset becomes from- waypoint
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
LEARNING OBJECTIVES
bull Data Analytics in AT
ndash TBO Flight Operation case
ndash Flight Incidents case
ndash FDM based flight performance analysis
ndash Delay Propagation in ATM Network
TRAJECTORY BASED-OPERATIONS (TBO)
bull A New ATM Paradigm Trajectory Based-Operations (TBO)
- Key feature of the target concept of operations proposed by SESAR and NextGen
- Collaborative management of business trajectories supported by advanced trajectory-based
automation tools
- Trajectory-based automation tools rely on trajectory prediction
- To support the interoperability between disparate trajectory-based automation tools
there is a need for mechanisms to synchronise Trajectory Predictors (TPs)
- TP synchronisation is a key prerequisite for the SESARNext Gen concepts
- The REACT project has focused on one of the types of information that can be
shared between TPs to achieve synchronisation the Aircraft Intent
A BIT OF TERMINOLOGY
bull Business Trajectory
ndash Represents the businessmission intention of an airspace user
ndash Evolves through a collaborative planning process that involves users and ATM service providers and whose outcome should be a trajectory that results in minimum deviations from the user preferences
bull Interoperability is a property referring to the ability of diverse systems to work together (inter-operate)
bull A key necessary condition for the interoperability of trajectory-based automation tools is the synchronisation of the underlying TPs
bull The synchronisation of two TPs results in a minimally acceptable difference between the trajectory outputs of those TPs (this minimally acceptable difference depends on the applications supported by the TPs)
5
TOWARDS TRAJECTORY BASED OPERATIONS (TBO)
City B
AOC1
AOC2
ANSP1
ANSP2
ANSP3
ANSP4
ANSP1
BUSINESS TRAJECTORIES
ANSP= Air Navigation Service Provider
AOC= Airline Operations Centre
6
TOWARDS TBO INTEROPERABILITY AND TP SYNCHRONISATION
TRAJECTORY RELATED
INFORMATION
AOC1
AOC2
ANSP1
ANSP2
ANSP3
ANSP1
ANSP4
7
TRAJECTORY RELATED
INFORMATION
TOWARDS TBO INTEROPERABILITY AND TP SYNCHRONISATION
TP2
TPI
TP1
TPP
TP6
TPN
TP3
TPR
TP4
TPK
TP5
TPL
TPH
CDampR
ASAS
FMS
AMANFDPS
FMS
FMS
ATFM
AMAN= Arrival manager
DMAN= Departure manager
FMS= Flight Management System
FP=Flight Planning
ASAS=Airborne Separation Assurance System
ATFM=Air Traffic Flow Management
FDPS=Flight Data Processing Tool
CDampR=Conflict Detection and Resolution
Actual aircraft state
(position speed
weighthellip)
MORE TERMINOLOGY TRAJECTORY-RELATED INFORMATION
Environmental
Conditions
Pilot
Real World
Trajectory Prediction (Air or Ground)
Flight Commands
amp Guidance
Modes
Flight
Intent
Flight
Plan
Tactical
Amendments to
Flight Plan
Airborne
Automation
System
Actual
Trajectory
Aircraft
Predicted
Trajectory
Trajectory
Computation
Infrastructure
Aircraft
Intent
Intent
Generation
Infrastructure
Initial
Conditions
Trajectory Predictor (TP)
AT or ABOVE FL290
SHARING TRAJECTORY-RELATED INFORMATION
Data COM InfrastructurePredicted trajectory
information
Flight
Intent
Airborne
Predicted
Trajectory
TP PROCESS 2 (eg arrival manager)
Flight
Intent
Ground
Predicted
Trajectory
Trajectory
Computation
Infrastructure
(1)
Aircraft
Intent
Intent
Generation
Infrastructure
(1)
Airborne TP
Trajectory
Computation
Infrastructure
(2)
Aircraft
Intent
Intent
Generation
Infrastructure
(2)
Ground TP
Aircraft Intent
information
Flight Intent
Information
Trajectory Prediction (eg flight management system)
bull Two levels in the language grammar lexical and syntactical
bull Lexical Level Instructions
ndash Instructions are atomic inputs to the Trajectory Engine that capture basic
commands and guidance modes at the disposal of the pilotFMS to direct the
operation of the aircraft
bull Syntactical level Operations
ndash Operations are sets of compatible instructions that when simultaneously active
univocally determine the ensuing aircraft motion
bull With a reduced set of instructions (AIDL alphabet) any possible aircraft
operation can be formally specified in such a way that the ensuing aircraft
motion is unambiguously determined
SHARING TRAJECTORY-RELATED INFORMATION
11
Next generation
FMS
AOC 2
ATFM DST
FMS
AOC 1
FDPS
AMAN DST
Next
Generation
FDPS
Air-Air
Air-Ground
Ground-Ground
SHARING TRAJECTORY-RELATED INFORMATION
12
TRAJECTORY RELATED INFORMATION
AIRCRAFT INTENT
TP2
TPI
TPP
TPR
TPK
TP5
TPL
TPH
Translator
I-5
Translator
R-5
Translator
2-K
Translator
R-2
Translator
2-5
Translator
I-2
Translator
H-5
Translator
R-P
N (N-1) divide 2TRANSLATORS
Translator
K-P
Translator
5-K
Translator
I-R
Translator
5-P
Translator
L-5
Translator
I-H
Translator
H-L
Translator
R-K
Translator
L-P
SHARING TRAJECTORY-RELATED INFORMATION
13
TP2
TPI
TPP
TPR
TPK
TP5
TPL
TPH
Translator
L-AIDL
AIDL
Translator
5-AIDL
Translator
P-AIDL
Translator
K-AIDL
Translator
R-AIDL
Translator
2-AIDL
Translator
H-AIDL
Translator
I-AIDL
N TRANSLATORS
SHARING TRAJECTORY-RELATED INFORMATION
externalinternal
Constraints amp
Rules
Aeronautical
Nav Data
Weather
Data
Basic Flight
Data amp
Schedule
Route Type amp
Optimization
Settings
Aircraft
Performance
Data
Business Rules
euroFlight
Number
City Pair
Alternate
ADES
DOF STD
Fuel Policy AC Type
AC
Equipment
AC
Envelope
Payload
Payload -
Range
Wind
Condition
Air Pressure
Air Temp
Natural
Hazards
Stat Dyn
Routes
Fix Free
Route
Opt Criteria
Cost Index
Traffic
Rights
RNAV Rules
NOTAM
TFR
(eg RAD)
Terrain
Clearance
Terminal
Procedures
DCT
Connection
Airport
Definition
Flight
connectivity
Human Req
Time Costs
Business
Targets
Business
Constraints
Conditional
Routes
DATA TYPES
bull METARTAF
LTBA 312020Z 05006KT 030V100 CAVOK 1908 Q1018 NOSIG
TAF LTBA 311640Z 31180124 03009KT CAVOK
BECMG 01030106 SCT035
TEMPO 01080112 04015G25KT
BECMG 01140116 CAVOK
Weather
Data
METAR EXPLAINED
KTTN 051853Z 04011KT 12SM VCTS SN FZFG BKN003 OVC010 M02M02 A3006 RMK AO2 TSB40
SLP176 P0002 T10171017
bull KTTN is the ICAO identifier for the Trenton-Mercer Airport
bull 051853Z indicates the day of the month is the 5th and the time of day is 1853 ZuluUTC 653PM GMT
or 153PM Eastern Standard Time
bull 04011KT indicates the wind is from 040deg true (north east) at 11 knots (20 kmh 13 mph) In the United
States the wind direction must have a 60deg or greater variance for variable wind direction to be reported
and the wind speed must be greater than 3 knots (56 kmh 35 mph)
bull 12SM indicates the prevailing visibility is 1frasl2 mi (800 m) SM = statute mile
bull VCTS indicates a thunderstorm (TS) in the vicinity (VC) which means from 5ndash10 mi (8ndash16 km)
bull SN indicates snow is falling at a moderate intensity a preceding plus or minus sign (+-) indicates heavy
or light precipitation Without a +- sign moderate precipitation is assumed
bull FZFG indicates the presence of freezing fog
bull BKN003 OVC010 indicates a broken (58 to 78 of the sky covered) cloud layer at 300 ft (91 m) above
ground level (AGL) and an overcast (88 of the sky covered) layer at 1000 ft (300 m)
bull M02M02 indicates the temperature is minus2degC (28degF) and the dewpoint is minus2degC (28degF) An M in
front of the number indicates that the temperaturedew point is minus ie below zero (0) Celsius
bull A3006 indicates the altimeter setting is 3006 inHg (1018 hPa)
bull RMK indicates the remarks section follows
DATA TYPES
bull Aeronautical Information Manual (AIM)
ndash SID and STAR Taxi charts
Aeronautical
Nav Data
SID
STAR
DATA TYPES
bull Airspace rules
ndash Eg seperation
Constraints amp
Rules
DATA TYPES
bull Cost Index
bull Airline (User) preferred routes
ndash User Preferences Model (UPM)
Route Type amp
Optimization
Settings
COST DEFINITION
COST INDEX EXAMPLE
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
INPUTS
bull Initial conditions (IC)
bull Flight Intent (FI)
bull User Preferences Model (UPM)
ndash ie airline policy
bull Operational Context Model (OCM)
ndash rules of airpace including
STARs and SIDs
bull ie ATFM policy
ndash Aircraft Performance Model
(APM)
bull Based on BADA
ndash Weather Model (WM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Flight Intent with User Preferences Model (UPM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull FI with UPM and Operational Context Model (OCM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory with details
DATA TYPES
bull Flight Plan
bull Regulated Flight Plan
bull Actual Flight data (Current Tactical)
bull Correlated Position data
bull CDM related data
Basic Flight
Data amp
Schedule
4D TRAJECTORY DATA PROFILES
LIPEEDFMJMP803JMPD22820110301031200BB9377945220110301031500FPLFPLAFPNEXENEXENNN2011030103150020110301031500TEFINS783849NNN00ACHN
NNN600300N00N0NDCULTNRSNNK00344154791F160N0234019032500LIPELUPOS5N10A443151N0111749EY
032955DCT7518V443121N0110416E32Y 033515DCT15038V443048N0104912E67Y 033640DCT16043V443040N0104526E75Y
033830LUPOSL99516057W443017N0103453EY 034355PARL99516099N444920N0101736EY 034735MISPOL995160127W450126N0100450EY
035305BEKANL995160169W451930N0094540EY 035720TZOL995160202N453333N0093026EY 040450PEPAGN851160260W455902N0090417EY
040730ABESIN851160280W460935N0090234EY 041350PIXOSN851160329W463619N0085859EY 041800SOPERN851160361W465322N0085640EY
042155ELMURN851160391W470924N0085427EY 042350ROLSAN851160406W471723N0085321EY 042705KUDESDCT160431W473115N0085126EN
044840DCT160597V490001N0083550E76N 045435DCT75623V491355N0083323E88N
050205EDFM3650A492821N0083051EN23032500LI040545NAS443151N0111749E460244N0090341E11600267
032500LIMMFIR040545FIR443151N0111749E460244N0090341E11600267 032500LIPECR033115ES443151N0111749E443113N0110030E194023
032500LIPECTR033115AUA443151N0111749E443113N0110030E194023 033115LIPPADS033735ES443113N0110030E443029N0104009E941602350
033115LIPPC1X033735ES443113N0110030E443029N0104009E941602350 033115LIPPCTA033735AUA443113N0110030E443029N0104009E941602350
033735LIMMECTA034805AUA443029N0104009E450310N0100300E16016050131 033735LIMMES1034805ES443029N0104009E450310N0100300E16016050131
033735LIMMES1X034805ES443029N0104009E450310N0100300E16016050131 034635LIMMR60041420ES445759N0100829E463827N0085842E160160119333
034805LIMMACTA040730AUA450310N0100300E460935N0090234E160160131280 034805LIMMADE035640ES450310N0100300E453126N0093244E160160131197
035640LIMMANE040730ES453126N0093244E460935N0090234E160160197280 040545LS042705NAS460244N0090341E473115N0085126E160160267431
040545LSASFIR042705FIR460244N0090341E473115N0085126E160160267431 040730LSAZCTA042705AUA460935N0090234E473115N0085126E160160280431
040730LSAZSSL042420ES460935N0090234E471936N0085303E160160280410 041545LSTSA50P042020CRSA464419N0085754E470300N0085520E160160344379
041545LSTSA52P041620ERSA464419N0085754E464627N0085736E160160344348 041620LSTSA51P042020ERSA464627N0085736E470300N0085520E160160348379
042020LSTSA40P042115ERSA470300N0085520E470644N0085449E160160379386
042420LSAZESL042705ES471936N0085303E473115N0085126E1601604104310344157065F160N02340 F140N023493 F160N023498 F150N0234390
F100N023439778032200LIPELUPOS5N10A443151N0111749EY 032540DCT6014V443128N0110716E25Y 032730DCT6022V443115N0110115E39Y
032800DCT6824V443111N0105944E42Y 032830DCT7027V443106N0105729E47Y 032845DCT7528V443105N0105644E49Y 032855DCT7829V443103N0105558E51Y
032910DCT8030V443102N0105513E53Y 032925DCT8032V443058N0105343E56Y 032955DCT8834V443055N0105212E60Y 033035DCT10037V443050N0104957E65Y
033040DCT10038V443048N0104912E67Y 033050DCT10439V443047N0104826E68Y 033110DCT10640V443045N0104741E70Y 033150DCT10644V443038N0104441E77Y
033155DCT11045V443037N0104355E79Y 033215LUPOSL99511057W443017N0103453EY 033240DCT11071V443638N0102907E33Y
033245DCT11472V443705N0102843E36Y 033310DCT12074V443800N0102753E40Y 033335DCT12078V443948N0102615E50Y 033345DCT12479V444016N0102550E52Y
033410DCT12880V444043N0102525E55Y 033445DCT12883V444205N0102411E62Y 033500DCT13084V444232N0102346E64Y 033515DCT13087V444353N0102232E71Y
033540DCT13789V444448N0102143E76Y 033600DCT14090V444515N0102118E79Y 033620DCT14092V444609N0102029E83Y 033640DCT14493V444637N0102004E86Y
033700DCT14094V444704N0101939E88Y 033740DCT14098V444853N0101801E98Y 033755PARL99514499N444920N0101736EY
034015DCT144120V445825N0100802E75Y 034110MISPOL995145127W450126N0100450EY 034200DCT145134V450427N0100138E17Y
034215DCT150135V450452N0100111E19Y 034250DCT150140V450702N0095854E31Y 034325DCT154142V450753N0095759E36Y
034405DCT160145V450911N0095637E43Y 034425DCT160148V451028N0095515E50Y 034520DCT160155V451329N0095203E67Y
034625DCT160162V451629N0094852E83Y 034720BEKANL995160169W451930N0094540EY 035145TZOL995160202N453333N0093026EY
035700DCT160242V455107N0091224E69Y 035925PEPAGN851160260W455902N0090417EY 040205ABESIN851160280W460935N0090234EY
040715DCT160319V463052N0085943E80Y 040840PIXOSN851160329W463619N0085859EY 041315SOPERN851160361W465322N0085640EY
041720DCT160390V470852N0085431E97Y 041730ELMURN851157391W470924N0085427EY 041755DCT150393V471028N0085418E13Y
041820DCT150397V471236N0085401E40Y 041920DCT150405V471651N0085325E93Y 041935ROLSAN851147406W471723N0085321EY
042000DCT140408V471830N0085312E8Y 042125DCT140419V472436N0085221E52Y 042205DCT140425V472755N0085154E76Y
042225DCT134427V472902N0085144E84Y 042240DCT130428V472935N0085140E88Y 042320KUDESN851121431W473115N0085126EN
042435DCT100437V473343N0085439E21N 042720ROMIRN851100459W474247N0090628EN 042825VEDOKN851100468W474724N0090714EN
042905TINOXDCT100473W475007N0090740EY 044335DCT100571G484048N0084511EY 045005DCT100607V485957N0083916E68Y
045040DCT94609V490101N0083856E72Y 045100DCT94611V490205N0083836E75Y 045140DCT84614V490341N0083807E81Y 045200DCT84616V490445N0083747E85Y
045240DCT74619V490620N0083717E91Y 045345INKAMDCT54624W490900N0083628EY 045655DCT54642V491820N0083258E56Y
045950DCT16656G492536N0083015EY 050110EDFM3661A492821N0083051EY39032200LI040020NAS443151N0111749E460244N0090341E11600267
032200LIMMFIR040020FIR443151N0111749E460244N0090341E11600267 032200LIPECR033020ES443151N0111749E443052N0105042E196036
032200LIPECTR033020AUA443151N0111749E443052N0105042E196036 033020LIPPADS033205ES443052N0105042E443029N0104009E961103650
033020LIPPC1X033205ES443052N0105042E443029N0104009E961103650 033020LIPPCTA033205AUA443052N0105042E443029N0104009E961103650
033205LIMMECTA034140AUA443029N0104009E450310N0100300E11014550131 033205LIMMES1034140ES443029N0104009E450310N0100300E11014550131
4D TRAJECTORY DATA PROFILES
Tactical flight Models
bull FTFM - Filed Tactical Flight Model The FTFM is the
ldquoinitialrdquo profile as it reflects the status of the demand before
activation of the regulation plan It is computed with the latest
flight plan version sent by each AO to the CFMUIFPS
bull RTFM - Regulated Tactical Flight Model The RTFM is the
ldquoregulatedrdquo profile as it reflects the status of the demand after
activation of the regulation plan It is computed with the latest
ATFM slot (CTOT) issued to the AO by the ground
regulation system
bull CTFM - Current Tactical Flight Model The CTFM is the
ldquoactualrdquo profile as it integrates the actual entry time of the
flights in the regulated TV It is computed with the Radar
Data sent by ACCs to CFMUETFMS ref
CPG_GEN - Profiles generated by the CFMU path generation
tool
bull SCR - Shortest Constrained Route
bull SRR - Shortest RAD restriction applied Route
bull SUR - Shortest Unconstrained Route
bull DCT - Direct route
CPF - Correlated Position reports for a Flight CPRs
(Correlated Position Reports) which are surveillance data
collected from the ACCs
Filed Flight Plan
CDM
Header
Point Profile
Airspace Profile
Circle Intersection
Profile
RTFM Profile
CTFM Profile
CFP Profile
FTFM Profile
4D TRAJECTORY DATA PROFILES
Current Tactical Flight Model (CTFM) is computed with Radar Data sent by
Area Control Centers to CFMUETFMS so it can be deemed as a fused
version of FTFM with real data
ENHANCED TACTICAL FLOW MANAGEMENT SYSTEM (ETFMS) EUROCONTROL 2013
DATA TYPES
bull Base of Aircraft Data (BADA) depending on ac type
ndash Nominal control variables (BADA 3)
ndash Full flight variable envelope (BADA 4)
bull optimization
Aircraft
Performance
Data
AIRCRAFT EQUATION OF MOTION
bull equation of motion sufficient in 3 dof
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
number of parameters of the system that may vary independently
BASE OF AIRCRAFT DATA (BADA)
bull There are two families of BADA APM based on the same modelling approach and components [EUROCONTROL]
bull BADA Family 3ndash providing a 90 coverage of the current aircraft types operating
in the ECAC airspace
ndash model aircraft behaviour over the normal operations part of the flight envelope and to meet todays requirements for aircraft performance modelling and simulation
bull BADA Family 4 ndash a newly developed model intended to meet advanced functional
and precision requirements of the new ATM systems
ndash providing a 60 coverage of the current aircraft types operating in ECAC airspace
ndash BADA 4 provides accurate modelling of aircraft over the entire flight envelope and enables modelling and simulation of advanced concepts of future systems
AIRCRAFT PERFORMANCE MODEL
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
BADA AIRCRAFT LIMITATION MODEL
DATA TYPES
bull Business objectives
ndash Cost Index
ndash User Preferences Model (UPM)
ndash Ground delays due to connectionshellip
Business Rules
euro
HORIZONTAL OPTIMISATION
TO_WPT FROM_WPT Cost
A
B
C
DEP
DEP
DEP
21
25
23
A
A
E
B
52
40
CG 45
B
B
E
F
49
53
G
G
F
J
73
79
E
E
K
H
84
75
F
F
H
I
70
67
I
I
L
M
96
85
HL 86
JM 119
KO 117
KL 109
MQ 115
LP 118
QDEST 134
OP 136
PDEST 130
Worklist
Dijkstra algorithm
DEPDEST
16
40
19
12
19
J
28
34
I14
17
O33
25
Q30
P32
F24
28
D
E
19
31
G22
A
B
C
2125
23
H
K
35
26 L
M18
29
1) Selection of segments for current from- waypoint
2) Calculation of costs for selected segments
3) Entering calculated datasets into worklist
4) Selection of best dataset from worklist
5) To- waypoint of best dataset becomes from- waypoint
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
TRAJECTORY BASED-OPERATIONS (TBO)
bull A New ATM Paradigm Trajectory Based-Operations (TBO)
- Key feature of the target concept of operations proposed by SESAR and NextGen
- Collaborative management of business trajectories supported by advanced trajectory-based
automation tools
- Trajectory-based automation tools rely on trajectory prediction
- To support the interoperability between disparate trajectory-based automation tools
there is a need for mechanisms to synchronise Trajectory Predictors (TPs)
- TP synchronisation is a key prerequisite for the SESARNext Gen concepts
- The REACT project has focused on one of the types of information that can be
shared between TPs to achieve synchronisation the Aircraft Intent
A BIT OF TERMINOLOGY
bull Business Trajectory
ndash Represents the businessmission intention of an airspace user
ndash Evolves through a collaborative planning process that involves users and ATM service providers and whose outcome should be a trajectory that results in minimum deviations from the user preferences
bull Interoperability is a property referring to the ability of diverse systems to work together (inter-operate)
bull A key necessary condition for the interoperability of trajectory-based automation tools is the synchronisation of the underlying TPs
bull The synchronisation of two TPs results in a minimally acceptable difference between the trajectory outputs of those TPs (this minimally acceptable difference depends on the applications supported by the TPs)
5
TOWARDS TRAJECTORY BASED OPERATIONS (TBO)
City B
AOC1
AOC2
ANSP1
ANSP2
ANSP3
ANSP4
ANSP1
BUSINESS TRAJECTORIES
ANSP= Air Navigation Service Provider
AOC= Airline Operations Centre
6
TOWARDS TBO INTEROPERABILITY AND TP SYNCHRONISATION
TRAJECTORY RELATED
INFORMATION
AOC1
AOC2
ANSP1
ANSP2
ANSP3
ANSP1
ANSP4
7
TRAJECTORY RELATED
INFORMATION
TOWARDS TBO INTEROPERABILITY AND TP SYNCHRONISATION
TP2
TPI
TP1
TPP
TP6
TPN
TP3
TPR
TP4
TPK
TP5
TPL
TPH
CDampR
ASAS
FMS
AMANFDPS
FMS
FMS
ATFM
AMAN= Arrival manager
DMAN= Departure manager
FMS= Flight Management System
FP=Flight Planning
ASAS=Airborne Separation Assurance System
ATFM=Air Traffic Flow Management
FDPS=Flight Data Processing Tool
CDampR=Conflict Detection and Resolution
Actual aircraft state
(position speed
weighthellip)
MORE TERMINOLOGY TRAJECTORY-RELATED INFORMATION
Environmental
Conditions
Pilot
Real World
Trajectory Prediction (Air or Ground)
Flight Commands
amp Guidance
Modes
Flight
Intent
Flight
Plan
Tactical
Amendments to
Flight Plan
Airborne
Automation
System
Actual
Trajectory
Aircraft
Predicted
Trajectory
Trajectory
Computation
Infrastructure
Aircraft
Intent
Intent
Generation
Infrastructure
Initial
Conditions
Trajectory Predictor (TP)
AT or ABOVE FL290
SHARING TRAJECTORY-RELATED INFORMATION
Data COM InfrastructurePredicted trajectory
information
Flight
Intent
Airborne
Predicted
Trajectory
TP PROCESS 2 (eg arrival manager)
Flight
Intent
Ground
Predicted
Trajectory
Trajectory
Computation
Infrastructure
(1)
Aircraft
Intent
Intent
Generation
Infrastructure
(1)
Airborne TP
Trajectory
Computation
Infrastructure
(2)
Aircraft
Intent
Intent
Generation
Infrastructure
(2)
Ground TP
Aircraft Intent
information
Flight Intent
Information
Trajectory Prediction (eg flight management system)
bull Two levels in the language grammar lexical and syntactical
bull Lexical Level Instructions
ndash Instructions are atomic inputs to the Trajectory Engine that capture basic
commands and guidance modes at the disposal of the pilotFMS to direct the
operation of the aircraft
bull Syntactical level Operations
ndash Operations are sets of compatible instructions that when simultaneously active
univocally determine the ensuing aircraft motion
bull With a reduced set of instructions (AIDL alphabet) any possible aircraft
operation can be formally specified in such a way that the ensuing aircraft
motion is unambiguously determined
SHARING TRAJECTORY-RELATED INFORMATION
11
Next generation
FMS
AOC 2
ATFM DST
FMS
AOC 1
FDPS
AMAN DST
Next
Generation
FDPS
Air-Air
Air-Ground
Ground-Ground
SHARING TRAJECTORY-RELATED INFORMATION
12
TRAJECTORY RELATED INFORMATION
AIRCRAFT INTENT
TP2
TPI
TPP
TPR
TPK
TP5
TPL
TPH
Translator
I-5
Translator
R-5
Translator
2-K
Translator
R-2
Translator
2-5
Translator
I-2
Translator
H-5
Translator
R-P
N (N-1) divide 2TRANSLATORS
Translator
K-P
Translator
5-K
Translator
I-R
Translator
5-P
Translator
L-5
Translator
I-H
Translator
H-L
Translator
R-K
Translator
L-P
SHARING TRAJECTORY-RELATED INFORMATION
13
TP2
TPI
TPP
TPR
TPK
TP5
TPL
TPH
Translator
L-AIDL
AIDL
Translator
5-AIDL
Translator
P-AIDL
Translator
K-AIDL
Translator
R-AIDL
Translator
2-AIDL
Translator
H-AIDL
Translator
I-AIDL
N TRANSLATORS
SHARING TRAJECTORY-RELATED INFORMATION
externalinternal
Constraints amp
Rules
Aeronautical
Nav Data
Weather
Data
Basic Flight
Data amp
Schedule
Route Type amp
Optimization
Settings
Aircraft
Performance
Data
Business Rules
euroFlight
Number
City Pair
Alternate
ADES
DOF STD
Fuel Policy AC Type
AC
Equipment
AC
Envelope
Payload
Payload -
Range
Wind
Condition
Air Pressure
Air Temp
Natural
Hazards
Stat Dyn
Routes
Fix Free
Route
Opt Criteria
Cost Index
Traffic
Rights
RNAV Rules
NOTAM
TFR
(eg RAD)
Terrain
Clearance
Terminal
Procedures
DCT
Connection
Airport
Definition
Flight
connectivity
Human Req
Time Costs
Business
Targets
Business
Constraints
Conditional
Routes
DATA TYPES
bull METARTAF
LTBA 312020Z 05006KT 030V100 CAVOK 1908 Q1018 NOSIG
TAF LTBA 311640Z 31180124 03009KT CAVOK
BECMG 01030106 SCT035
TEMPO 01080112 04015G25KT
BECMG 01140116 CAVOK
Weather
Data
METAR EXPLAINED
KTTN 051853Z 04011KT 12SM VCTS SN FZFG BKN003 OVC010 M02M02 A3006 RMK AO2 TSB40
SLP176 P0002 T10171017
bull KTTN is the ICAO identifier for the Trenton-Mercer Airport
bull 051853Z indicates the day of the month is the 5th and the time of day is 1853 ZuluUTC 653PM GMT
or 153PM Eastern Standard Time
bull 04011KT indicates the wind is from 040deg true (north east) at 11 knots (20 kmh 13 mph) In the United
States the wind direction must have a 60deg or greater variance for variable wind direction to be reported
and the wind speed must be greater than 3 knots (56 kmh 35 mph)
bull 12SM indicates the prevailing visibility is 1frasl2 mi (800 m) SM = statute mile
bull VCTS indicates a thunderstorm (TS) in the vicinity (VC) which means from 5ndash10 mi (8ndash16 km)
bull SN indicates snow is falling at a moderate intensity a preceding plus or minus sign (+-) indicates heavy
or light precipitation Without a +- sign moderate precipitation is assumed
bull FZFG indicates the presence of freezing fog
bull BKN003 OVC010 indicates a broken (58 to 78 of the sky covered) cloud layer at 300 ft (91 m) above
ground level (AGL) and an overcast (88 of the sky covered) layer at 1000 ft (300 m)
bull M02M02 indicates the temperature is minus2degC (28degF) and the dewpoint is minus2degC (28degF) An M in
front of the number indicates that the temperaturedew point is minus ie below zero (0) Celsius
bull A3006 indicates the altimeter setting is 3006 inHg (1018 hPa)
bull RMK indicates the remarks section follows
DATA TYPES
bull Aeronautical Information Manual (AIM)
ndash SID and STAR Taxi charts
Aeronautical
Nav Data
SID
STAR
DATA TYPES
bull Airspace rules
ndash Eg seperation
Constraints amp
Rules
DATA TYPES
bull Cost Index
bull Airline (User) preferred routes
ndash User Preferences Model (UPM)
Route Type amp
Optimization
Settings
COST DEFINITION
COST INDEX EXAMPLE
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
INPUTS
bull Initial conditions (IC)
bull Flight Intent (FI)
bull User Preferences Model (UPM)
ndash ie airline policy
bull Operational Context Model (OCM)
ndash rules of airpace including
STARs and SIDs
bull ie ATFM policy
ndash Aircraft Performance Model
(APM)
bull Based on BADA
ndash Weather Model (WM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Flight Intent with User Preferences Model (UPM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull FI with UPM and Operational Context Model (OCM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory with details
DATA TYPES
bull Flight Plan
bull Regulated Flight Plan
bull Actual Flight data (Current Tactical)
bull Correlated Position data
bull CDM related data
Basic Flight
Data amp
Schedule
4D TRAJECTORY DATA PROFILES
LIPEEDFMJMP803JMPD22820110301031200BB9377945220110301031500FPLFPLAFPNEXENEXENNN2011030103150020110301031500TEFINS783849NNN00ACHN
NNN600300N00N0NDCULTNRSNNK00344154791F160N0234019032500LIPELUPOS5N10A443151N0111749EY
032955DCT7518V443121N0110416E32Y 033515DCT15038V443048N0104912E67Y 033640DCT16043V443040N0104526E75Y
033830LUPOSL99516057W443017N0103453EY 034355PARL99516099N444920N0101736EY 034735MISPOL995160127W450126N0100450EY
035305BEKANL995160169W451930N0094540EY 035720TZOL995160202N453333N0093026EY 040450PEPAGN851160260W455902N0090417EY
040730ABESIN851160280W460935N0090234EY 041350PIXOSN851160329W463619N0085859EY 041800SOPERN851160361W465322N0085640EY
042155ELMURN851160391W470924N0085427EY 042350ROLSAN851160406W471723N0085321EY 042705KUDESDCT160431W473115N0085126EN
044840DCT160597V490001N0083550E76N 045435DCT75623V491355N0083323E88N
050205EDFM3650A492821N0083051EN23032500LI040545NAS443151N0111749E460244N0090341E11600267
032500LIMMFIR040545FIR443151N0111749E460244N0090341E11600267 032500LIPECR033115ES443151N0111749E443113N0110030E194023
032500LIPECTR033115AUA443151N0111749E443113N0110030E194023 033115LIPPADS033735ES443113N0110030E443029N0104009E941602350
033115LIPPC1X033735ES443113N0110030E443029N0104009E941602350 033115LIPPCTA033735AUA443113N0110030E443029N0104009E941602350
033735LIMMECTA034805AUA443029N0104009E450310N0100300E16016050131 033735LIMMES1034805ES443029N0104009E450310N0100300E16016050131
033735LIMMES1X034805ES443029N0104009E450310N0100300E16016050131 034635LIMMR60041420ES445759N0100829E463827N0085842E160160119333
034805LIMMACTA040730AUA450310N0100300E460935N0090234E160160131280 034805LIMMADE035640ES450310N0100300E453126N0093244E160160131197
035640LIMMANE040730ES453126N0093244E460935N0090234E160160197280 040545LS042705NAS460244N0090341E473115N0085126E160160267431
040545LSASFIR042705FIR460244N0090341E473115N0085126E160160267431 040730LSAZCTA042705AUA460935N0090234E473115N0085126E160160280431
040730LSAZSSL042420ES460935N0090234E471936N0085303E160160280410 041545LSTSA50P042020CRSA464419N0085754E470300N0085520E160160344379
041545LSTSA52P041620ERSA464419N0085754E464627N0085736E160160344348 041620LSTSA51P042020ERSA464627N0085736E470300N0085520E160160348379
042020LSTSA40P042115ERSA470300N0085520E470644N0085449E160160379386
042420LSAZESL042705ES471936N0085303E473115N0085126E1601604104310344157065F160N02340 F140N023493 F160N023498 F150N0234390
F100N023439778032200LIPELUPOS5N10A443151N0111749EY 032540DCT6014V443128N0110716E25Y 032730DCT6022V443115N0110115E39Y
032800DCT6824V443111N0105944E42Y 032830DCT7027V443106N0105729E47Y 032845DCT7528V443105N0105644E49Y 032855DCT7829V443103N0105558E51Y
032910DCT8030V443102N0105513E53Y 032925DCT8032V443058N0105343E56Y 032955DCT8834V443055N0105212E60Y 033035DCT10037V443050N0104957E65Y
033040DCT10038V443048N0104912E67Y 033050DCT10439V443047N0104826E68Y 033110DCT10640V443045N0104741E70Y 033150DCT10644V443038N0104441E77Y
033155DCT11045V443037N0104355E79Y 033215LUPOSL99511057W443017N0103453EY 033240DCT11071V443638N0102907E33Y
033245DCT11472V443705N0102843E36Y 033310DCT12074V443800N0102753E40Y 033335DCT12078V443948N0102615E50Y 033345DCT12479V444016N0102550E52Y
033410DCT12880V444043N0102525E55Y 033445DCT12883V444205N0102411E62Y 033500DCT13084V444232N0102346E64Y 033515DCT13087V444353N0102232E71Y
033540DCT13789V444448N0102143E76Y 033600DCT14090V444515N0102118E79Y 033620DCT14092V444609N0102029E83Y 033640DCT14493V444637N0102004E86Y
033700DCT14094V444704N0101939E88Y 033740DCT14098V444853N0101801E98Y 033755PARL99514499N444920N0101736EY
034015DCT144120V445825N0100802E75Y 034110MISPOL995145127W450126N0100450EY 034200DCT145134V450427N0100138E17Y
034215DCT150135V450452N0100111E19Y 034250DCT150140V450702N0095854E31Y 034325DCT154142V450753N0095759E36Y
034405DCT160145V450911N0095637E43Y 034425DCT160148V451028N0095515E50Y 034520DCT160155V451329N0095203E67Y
034625DCT160162V451629N0094852E83Y 034720BEKANL995160169W451930N0094540EY 035145TZOL995160202N453333N0093026EY
035700DCT160242V455107N0091224E69Y 035925PEPAGN851160260W455902N0090417EY 040205ABESIN851160280W460935N0090234EY
040715DCT160319V463052N0085943E80Y 040840PIXOSN851160329W463619N0085859EY 041315SOPERN851160361W465322N0085640EY
041720DCT160390V470852N0085431E97Y 041730ELMURN851157391W470924N0085427EY 041755DCT150393V471028N0085418E13Y
041820DCT150397V471236N0085401E40Y 041920DCT150405V471651N0085325E93Y 041935ROLSAN851147406W471723N0085321EY
042000DCT140408V471830N0085312E8Y 042125DCT140419V472436N0085221E52Y 042205DCT140425V472755N0085154E76Y
042225DCT134427V472902N0085144E84Y 042240DCT130428V472935N0085140E88Y 042320KUDESN851121431W473115N0085126EN
042435DCT100437V473343N0085439E21N 042720ROMIRN851100459W474247N0090628EN 042825VEDOKN851100468W474724N0090714EN
042905TINOXDCT100473W475007N0090740EY 044335DCT100571G484048N0084511EY 045005DCT100607V485957N0083916E68Y
045040DCT94609V490101N0083856E72Y 045100DCT94611V490205N0083836E75Y 045140DCT84614V490341N0083807E81Y 045200DCT84616V490445N0083747E85Y
045240DCT74619V490620N0083717E91Y 045345INKAMDCT54624W490900N0083628EY 045655DCT54642V491820N0083258E56Y
045950DCT16656G492536N0083015EY 050110EDFM3661A492821N0083051EY39032200LI040020NAS443151N0111749E460244N0090341E11600267
032200LIMMFIR040020FIR443151N0111749E460244N0090341E11600267 032200LIPECR033020ES443151N0111749E443052N0105042E196036
032200LIPECTR033020AUA443151N0111749E443052N0105042E196036 033020LIPPADS033205ES443052N0105042E443029N0104009E961103650
033020LIPPC1X033205ES443052N0105042E443029N0104009E961103650 033020LIPPCTA033205AUA443052N0105042E443029N0104009E961103650
033205LIMMECTA034140AUA443029N0104009E450310N0100300E11014550131 033205LIMMES1034140ES443029N0104009E450310N0100300E11014550131
4D TRAJECTORY DATA PROFILES
Tactical flight Models
bull FTFM - Filed Tactical Flight Model The FTFM is the
ldquoinitialrdquo profile as it reflects the status of the demand before
activation of the regulation plan It is computed with the latest
flight plan version sent by each AO to the CFMUIFPS
bull RTFM - Regulated Tactical Flight Model The RTFM is the
ldquoregulatedrdquo profile as it reflects the status of the demand after
activation of the regulation plan It is computed with the latest
ATFM slot (CTOT) issued to the AO by the ground
regulation system
bull CTFM - Current Tactical Flight Model The CTFM is the
ldquoactualrdquo profile as it integrates the actual entry time of the
flights in the regulated TV It is computed with the Radar
Data sent by ACCs to CFMUETFMS ref
CPG_GEN - Profiles generated by the CFMU path generation
tool
bull SCR - Shortest Constrained Route
bull SRR - Shortest RAD restriction applied Route
bull SUR - Shortest Unconstrained Route
bull DCT - Direct route
CPF - Correlated Position reports for a Flight CPRs
(Correlated Position Reports) which are surveillance data
collected from the ACCs
Filed Flight Plan
CDM
Header
Point Profile
Airspace Profile
Circle Intersection
Profile
RTFM Profile
CTFM Profile
CFP Profile
FTFM Profile
4D TRAJECTORY DATA PROFILES
Current Tactical Flight Model (CTFM) is computed with Radar Data sent by
Area Control Centers to CFMUETFMS so it can be deemed as a fused
version of FTFM with real data
ENHANCED TACTICAL FLOW MANAGEMENT SYSTEM (ETFMS) EUROCONTROL 2013
DATA TYPES
bull Base of Aircraft Data (BADA) depending on ac type
ndash Nominal control variables (BADA 3)
ndash Full flight variable envelope (BADA 4)
bull optimization
Aircraft
Performance
Data
AIRCRAFT EQUATION OF MOTION
bull equation of motion sufficient in 3 dof
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
number of parameters of the system that may vary independently
BASE OF AIRCRAFT DATA (BADA)
bull There are two families of BADA APM based on the same modelling approach and components [EUROCONTROL]
bull BADA Family 3ndash providing a 90 coverage of the current aircraft types operating
in the ECAC airspace
ndash model aircraft behaviour over the normal operations part of the flight envelope and to meet todays requirements for aircraft performance modelling and simulation
bull BADA Family 4 ndash a newly developed model intended to meet advanced functional
and precision requirements of the new ATM systems
ndash providing a 60 coverage of the current aircraft types operating in ECAC airspace
ndash BADA 4 provides accurate modelling of aircraft over the entire flight envelope and enables modelling and simulation of advanced concepts of future systems
AIRCRAFT PERFORMANCE MODEL
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
BADA AIRCRAFT LIMITATION MODEL
DATA TYPES
bull Business objectives
ndash Cost Index
ndash User Preferences Model (UPM)
ndash Ground delays due to connectionshellip
Business Rules
euro
HORIZONTAL OPTIMISATION
TO_WPT FROM_WPT Cost
A
B
C
DEP
DEP
DEP
21
25
23
A
A
E
B
52
40
CG 45
B
B
E
F
49
53
G
G
F
J
73
79
E
E
K
H
84
75
F
F
H
I
70
67
I
I
L
M
96
85
HL 86
JM 119
KO 117
KL 109
MQ 115
LP 118
QDEST 134
OP 136
PDEST 130
Worklist
Dijkstra algorithm
DEPDEST
16
40
19
12
19
J
28
34
I14
17
O33
25
Q30
P32
F24
28
D
E
19
31
G22
A
B
C
2125
23
H
K
35
26 L
M18
29
1) Selection of segments for current from- waypoint
2) Calculation of costs for selected segments
3) Entering calculated datasets into worklist
4) Selection of best dataset from worklist
5) To- waypoint of best dataset becomes from- waypoint
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
A BIT OF TERMINOLOGY
bull Business Trajectory
ndash Represents the businessmission intention of an airspace user
ndash Evolves through a collaborative planning process that involves users and ATM service providers and whose outcome should be a trajectory that results in minimum deviations from the user preferences
bull Interoperability is a property referring to the ability of diverse systems to work together (inter-operate)
bull A key necessary condition for the interoperability of trajectory-based automation tools is the synchronisation of the underlying TPs
bull The synchronisation of two TPs results in a minimally acceptable difference between the trajectory outputs of those TPs (this minimally acceptable difference depends on the applications supported by the TPs)
5
TOWARDS TRAJECTORY BASED OPERATIONS (TBO)
City B
AOC1
AOC2
ANSP1
ANSP2
ANSP3
ANSP4
ANSP1
BUSINESS TRAJECTORIES
ANSP= Air Navigation Service Provider
AOC= Airline Operations Centre
6
TOWARDS TBO INTEROPERABILITY AND TP SYNCHRONISATION
TRAJECTORY RELATED
INFORMATION
AOC1
AOC2
ANSP1
ANSP2
ANSP3
ANSP1
ANSP4
7
TRAJECTORY RELATED
INFORMATION
TOWARDS TBO INTEROPERABILITY AND TP SYNCHRONISATION
TP2
TPI
TP1
TPP
TP6
TPN
TP3
TPR
TP4
TPK
TP5
TPL
TPH
CDampR
ASAS
FMS
AMANFDPS
FMS
FMS
ATFM
AMAN= Arrival manager
DMAN= Departure manager
FMS= Flight Management System
FP=Flight Planning
ASAS=Airborne Separation Assurance System
ATFM=Air Traffic Flow Management
FDPS=Flight Data Processing Tool
CDampR=Conflict Detection and Resolution
Actual aircraft state
(position speed
weighthellip)
MORE TERMINOLOGY TRAJECTORY-RELATED INFORMATION
Environmental
Conditions
Pilot
Real World
Trajectory Prediction (Air or Ground)
Flight Commands
amp Guidance
Modes
Flight
Intent
Flight
Plan
Tactical
Amendments to
Flight Plan
Airborne
Automation
System
Actual
Trajectory
Aircraft
Predicted
Trajectory
Trajectory
Computation
Infrastructure
Aircraft
Intent
Intent
Generation
Infrastructure
Initial
Conditions
Trajectory Predictor (TP)
AT or ABOVE FL290
SHARING TRAJECTORY-RELATED INFORMATION
Data COM InfrastructurePredicted trajectory
information
Flight
Intent
Airborne
Predicted
Trajectory
TP PROCESS 2 (eg arrival manager)
Flight
Intent
Ground
Predicted
Trajectory
Trajectory
Computation
Infrastructure
(1)
Aircraft
Intent
Intent
Generation
Infrastructure
(1)
Airborne TP
Trajectory
Computation
Infrastructure
(2)
Aircraft
Intent
Intent
Generation
Infrastructure
(2)
Ground TP
Aircraft Intent
information
Flight Intent
Information
Trajectory Prediction (eg flight management system)
bull Two levels in the language grammar lexical and syntactical
bull Lexical Level Instructions
ndash Instructions are atomic inputs to the Trajectory Engine that capture basic
commands and guidance modes at the disposal of the pilotFMS to direct the
operation of the aircraft
bull Syntactical level Operations
ndash Operations are sets of compatible instructions that when simultaneously active
univocally determine the ensuing aircraft motion
bull With a reduced set of instructions (AIDL alphabet) any possible aircraft
operation can be formally specified in such a way that the ensuing aircraft
motion is unambiguously determined
SHARING TRAJECTORY-RELATED INFORMATION
11
Next generation
FMS
AOC 2
ATFM DST
FMS
AOC 1
FDPS
AMAN DST
Next
Generation
FDPS
Air-Air
Air-Ground
Ground-Ground
SHARING TRAJECTORY-RELATED INFORMATION
12
TRAJECTORY RELATED INFORMATION
AIRCRAFT INTENT
TP2
TPI
TPP
TPR
TPK
TP5
TPL
TPH
Translator
I-5
Translator
R-5
Translator
2-K
Translator
R-2
Translator
2-5
Translator
I-2
Translator
H-5
Translator
R-P
N (N-1) divide 2TRANSLATORS
Translator
K-P
Translator
5-K
Translator
I-R
Translator
5-P
Translator
L-5
Translator
I-H
Translator
H-L
Translator
R-K
Translator
L-P
SHARING TRAJECTORY-RELATED INFORMATION
13
TP2
TPI
TPP
TPR
TPK
TP5
TPL
TPH
Translator
L-AIDL
AIDL
Translator
5-AIDL
Translator
P-AIDL
Translator
K-AIDL
Translator
R-AIDL
Translator
2-AIDL
Translator
H-AIDL
Translator
I-AIDL
N TRANSLATORS
SHARING TRAJECTORY-RELATED INFORMATION
externalinternal
Constraints amp
Rules
Aeronautical
Nav Data
Weather
Data
Basic Flight
Data amp
Schedule
Route Type amp
Optimization
Settings
Aircraft
Performance
Data
Business Rules
euroFlight
Number
City Pair
Alternate
ADES
DOF STD
Fuel Policy AC Type
AC
Equipment
AC
Envelope
Payload
Payload -
Range
Wind
Condition
Air Pressure
Air Temp
Natural
Hazards
Stat Dyn
Routes
Fix Free
Route
Opt Criteria
Cost Index
Traffic
Rights
RNAV Rules
NOTAM
TFR
(eg RAD)
Terrain
Clearance
Terminal
Procedures
DCT
Connection
Airport
Definition
Flight
connectivity
Human Req
Time Costs
Business
Targets
Business
Constraints
Conditional
Routes
DATA TYPES
bull METARTAF
LTBA 312020Z 05006KT 030V100 CAVOK 1908 Q1018 NOSIG
TAF LTBA 311640Z 31180124 03009KT CAVOK
BECMG 01030106 SCT035
TEMPO 01080112 04015G25KT
BECMG 01140116 CAVOK
Weather
Data
METAR EXPLAINED
KTTN 051853Z 04011KT 12SM VCTS SN FZFG BKN003 OVC010 M02M02 A3006 RMK AO2 TSB40
SLP176 P0002 T10171017
bull KTTN is the ICAO identifier for the Trenton-Mercer Airport
bull 051853Z indicates the day of the month is the 5th and the time of day is 1853 ZuluUTC 653PM GMT
or 153PM Eastern Standard Time
bull 04011KT indicates the wind is from 040deg true (north east) at 11 knots (20 kmh 13 mph) In the United
States the wind direction must have a 60deg or greater variance for variable wind direction to be reported
and the wind speed must be greater than 3 knots (56 kmh 35 mph)
bull 12SM indicates the prevailing visibility is 1frasl2 mi (800 m) SM = statute mile
bull VCTS indicates a thunderstorm (TS) in the vicinity (VC) which means from 5ndash10 mi (8ndash16 km)
bull SN indicates snow is falling at a moderate intensity a preceding plus or minus sign (+-) indicates heavy
or light precipitation Without a +- sign moderate precipitation is assumed
bull FZFG indicates the presence of freezing fog
bull BKN003 OVC010 indicates a broken (58 to 78 of the sky covered) cloud layer at 300 ft (91 m) above
ground level (AGL) and an overcast (88 of the sky covered) layer at 1000 ft (300 m)
bull M02M02 indicates the temperature is minus2degC (28degF) and the dewpoint is minus2degC (28degF) An M in
front of the number indicates that the temperaturedew point is minus ie below zero (0) Celsius
bull A3006 indicates the altimeter setting is 3006 inHg (1018 hPa)
bull RMK indicates the remarks section follows
DATA TYPES
bull Aeronautical Information Manual (AIM)
ndash SID and STAR Taxi charts
Aeronautical
Nav Data
SID
STAR
DATA TYPES
bull Airspace rules
ndash Eg seperation
Constraints amp
Rules
DATA TYPES
bull Cost Index
bull Airline (User) preferred routes
ndash User Preferences Model (UPM)
Route Type amp
Optimization
Settings
COST DEFINITION
COST INDEX EXAMPLE
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
INPUTS
bull Initial conditions (IC)
bull Flight Intent (FI)
bull User Preferences Model (UPM)
ndash ie airline policy
bull Operational Context Model (OCM)
ndash rules of airpace including
STARs and SIDs
bull ie ATFM policy
ndash Aircraft Performance Model
(APM)
bull Based on BADA
ndash Weather Model (WM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Flight Intent with User Preferences Model (UPM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull FI with UPM and Operational Context Model (OCM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory with details
DATA TYPES
bull Flight Plan
bull Regulated Flight Plan
bull Actual Flight data (Current Tactical)
bull Correlated Position data
bull CDM related data
Basic Flight
Data amp
Schedule
4D TRAJECTORY DATA PROFILES
LIPEEDFMJMP803JMPD22820110301031200BB9377945220110301031500FPLFPLAFPNEXENEXENNN2011030103150020110301031500TEFINS783849NNN00ACHN
NNN600300N00N0NDCULTNRSNNK00344154791F160N0234019032500LIPELUPOS5N10A443151N0111749EY
032955DCT7518V443121N0110416E32Y 033515DCT15038V443048N0104912E67Y 033640DCT16043V443040N0104526E75Y
033830LUPOSL99516057W443017N0103453EY 034355PARL99516099N444920N0101736EY 034735MISPOL995160127W450126N0100450EY
035305BEKANL995160169W451930N0094540EY 035720TZOL995160202N453333N0093026EY 040450PEPAGN851160260W455902N0090417EY
040730ABESIN851160280W460935N0090234EY 041350PIXOSN851160329W463619N0085859EY 041800SOPERN851160361W465322N0085640EY
042155ELMURN851160391W470924N0085427EY 042350ROLSAN851160406W471723N0085321EY 042705KUDESDCT160431W473115N0085126EN
044840DCT160597V490001N0083550E76N 045435DCT75623V491355N0083323E88N
050205EDFM3650A492821N0083051EN23032500LI040545NAS443151N0111749E460244N0090341E11600267
032500LIMMFIR040545FIR443151N0111749E460244N0090341E11600267 032500LIPECR033115ES443151N0111749E443113N0110030E194023
032500LIPECTR033115AUA443151N0111749E443113N0110030E194023 033115LIPPADS033735ES443113N0110030E443029N0104009E941602350
033115LIPPC1X033735ES443113N0110030E443029N0104009E941602350 033115LIPPCTA033735AUA443113N0110030E443029N0104009E941602350
033735LIMMECTA034805AUA443029N0104009E450310N0100300E16016050131 033735LIMMES1034805ES443029N0104009E450310N0100300E16016050131
033735LIMMES1X034805ES443029N0104009E450310N0100300E16016050131 034635LIMMR60041420ES445759N0100829E463827N0085842E160160119333
034805LIMMACTA040730AUA450310N0100300E460935N0090234E160160131280 034805LIMMADE035640ES450310N0100300E453126N0093244E160160131197
035640LIMMANE040730ES453126N0093244E460935N0090234E160160197280 040545LS042705NAS460244N0090341E473115N0085126E160160267431
040545LSASFIR042705FIR460244N0090341E473115N0085126E160160267431 040730LSAZCTA042705AUA460935N0090234E473115N0085126E160160280431
040730LSAZSSL042420ES460935N0090234E471936N0085303E160160280410 041545LSTSA50P042020CRSA464419N0085754E470300N0085520E160160344379
041545LSTSA52P041620ERSA464419N0085754E464627N0085736E160160344348 041620LSTSA51P042020ERSA464627N0085736E470300N0085520E160160348379
042020LSTSA40P042115ERSA470300N0085520E470644N0085449E160160379386
042420LSAZESL042705ES471936N0085303E473115N0085126E1601604104310344157065F160N02340 F140N023493 F160N023498 F150N0234390
F100N023439778032200LIPELUPOS5N10A443151N0111749EY 032540DCT6014V443128N0110716E25Y 032730DCT6022V443115N0110115E39Y
032800DCT6824V443111N0105944E42Y 032830DCT7027V443106N0105729E47Y 032845DCT7528V443105N0105644E49Y 032855DCT7829V443103N0105558E51Y
032910DCT8030V443102N0105513E53Y 032925DCT8032V443058N0105343E56Y 032955DCT8834V443055N0105212E60Y 033035DCT10037V443050N0104957E65Y
033040DCT10038V443048N0104912E67Y 033050DCT10439V443047N0104826E68Y 033110DCT10640V443045N0104741E70Y 033150DCT10644V443038N0104441E77Y
033155DCT11045V443037N0104355E79Y 033215LUPOSL99511057W443017N0103453EY 033240DCT11071V443638N0102907E33Y
033245DCT11472V443705N0102843E36Y 033310DCT12074V443800N0102753E40Y 033335DCT12078V443948N0102615E50Y 033345DCT12479V444016N0102550E52Y
033410DCT12880V444043N0102525E55Y 033445DCT12883V444205N0102411E62Y 033500DCT13084V444232N0102346E64Y 033515DCT13087V444353N0102232E71Y
033540DCT13789V444448N0102143E76Y 033600DCT14090V444515N0102118E79Y 033620DCT14092V444609N0102029E83Y 033640DCT14493V444637N0102004E86Y
033700DCT14094V444704N0101939E88Y 033740DCT14098V444853N0101801E98Y 033755PARL99514499N444920N0101736EY
034015DCT144120V445825N0100802E75Y 034110MISPOL995145127W450126N0100450EY 034200DCT145134V450427N0100138E17Y
034215DCT150135V450452N0100111E19Y 034250DCT150140V450702N0095854E31Y 034325DCT154142V450753N0095759E36Y
034405DCT160145V450911N0095637E43Y 034425DCT160148V451028N0095515E50Y 034520DCT160155V451329N0095203E67Y
034625DCT160162V451629N0094852E83Y 034720BEKANL995160169W451930N0094540EY 035145TZOL995160202N453333N0093026EY
035700DCT160242V455107N0091224E69Y 035925PEPAGN851160260W455902N0090417EY 040205ABESIN851160280W460935N0090234EY
040715DCT160319V463052N0085943E80Y 040840PIXOSN851160329W463619N0085859EY 041315SOPERN851160361W465322N0085640EY
041720DCT160390V470852N0085431E97Y 041730ELMURN851157391W470924N0085427EY 041755DCT150393V471028N0085418E13Y
041820DCT150397V471236N0085401E40Y 041920DCT150405V471651N0085325E93Y 041935ROLSAN851147406W471723N0085321EY
042000DCT140408V471830N0085312E8Y 042125DCT140419V472436N0085221E52Y 042205DCT140425V472755N0085154E76Y
042225DCT134427V472902N0085144E84Y 042240DCT130428V472935N0085140E88Y 042320KUDESN851121431W473115N0085126EN
042435DCT100437V473343N0085439E21N 042720ROMIRN851100459W474247N0090628EN 042825VEDOKN851100468W474724N0090714EN
042905TINOXDCT100473W475007N0090740EY 044335DCT100571G484048N0084511EY 045005DCT100607V485957N0083916E68Y
045040DCT94609V490101N0083856E72Y 045100DCT94611V490205N0083836E75Y 045140DCT84614V490341N0083807E81Y 045200DCT84616V490445N0083747E85Y
045240DCT74619V490620N0083717E91Y 045345INKAMDCT54624W490900N0083628EY 045655DCT54642V491820N0083258E56Y
045950DCT16656G492536N0083015EY 050110EDFM3661A492821N0083051EY39032200LI040020NAS443151N0111749E460244N0090341E11600267
032200LIMMFIR040020FIR443151N0111749E460244N0090341E11600267 032200LIPECR033020ES443151N0111749E443052N0105042E196036
032200LIPECTR033020AUA443151N0111749E443052N0105042E196036 033020LIPPADS033205ES443052N0105042E443029N0104009E961103650
033020LIPPC1X033205ES443052N0105042E443029N0104009E961103650 033020LIPPCTA033205AUA443052N0105042E443029N0104009E961103650
033205LIMMECTA034140AUA443029N0104009E450310N0100300E11014550131 033205LIMMES1034140ES443029N0104009E450310N0100300E11014550131
4D TRAJECTORY DATA PROFILES
Tactical flight Models
bull FTFM - Filed Tactical Flight Model The FTFM is the
ldquoinitialrdquo profile as it reflects the status of the demand before
activation of the regulation plan It is computed with the latest
flight plan version sent by each AO to the CFMUIFPS
bull RTFM - Regulated Tactical Flight Model The RTFM is the
ldquoregulatedrdquo profile as it reflects the status of the demand after
activation of the regulation plan It is computed with the latest
ATFM slot (CTOT) issued to the AO by the ground
regulation system
bull CTFM - Current Tactical Flight Model The CTFM is the
ldquoactualrdquo profile as it integrates the actual entry time of the
flights in the regulated TV It is computed with the Radar
Data sent by ACCs to CFMUETFMS ref
CPG_GEN - Profiles generated by the CFMU path generation
tool
bull SCR - Shortest Constrained Route
bull SRR - Shortest RAD restriction applied Route
bull SUR - Shortest Unconstrained Route
bull DCT - Direct route
CPF - Correlated Position reports for a Flight CPRs
(Correlated Position Reports) which are surveillance data
collected from the ACCs
Filed Flight Plan
CDM
Header
Point Profile
Airspace Profile
Circle Intersection
Profile
RTFM Profile
CTFM Profile
CFP Profile
FTFM Profile
4D TRAJECTORY DATA PROFILES
Current Tactical Flight Model (CTFM) is computed with Radar Data sent by
Area Control Centers to CFMUETFMS so it can be deemed as a fused
version of FTFM with real data
ENHANCED TACTICAL FLOW MANAGEMENT SYSTEM (ETFMS) EUROCONTROL 2013
DATA TYPES
bull Base of Aircraft Data (BADA) depending on ac type
ndash Nominal control variables (BADA 3)
ndash Full flight variable envelope (BADA 4)
bull optimization
Aircraft
Performance
Data
AIRCRAFT EQUATION OF MOTION
bull equation of motion sufficient in 3 dof
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
number of parameters of the system that may vary independently
BASE OF AIRCRAFT DATA (BADA)
bull There are two families of BADA APM based on the same modelling approach and components [EUROCONTROL]
bull BADA Family 3ndash providing a 90 coverage of the current aircraft types operating
in the ECAC airspace
ndash model aircraft behaviour over the normal operations part of the flight envelope and to meet todays requirements for aircraft performance modelling and simulation
bull BADA Family 4 ndash a newly developed model intended to meet advanced functional
and precision requirements of the new ATM systems
ndash providing a 60 coverage of the current aircraft types operating in ECAC airspace
ndash BADA 4 provides accurate modelling of aircraft over the entire flight envelope and enables modelling and simulation of advanced concepts of future systems
AIRCRAFT PERFORMANCE MODEL
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
BADA AIRCRAFT LIMITATION MODEL
DATA TYPES
bull Business objectives
ndash Cost Index
ndash User Preferences Model (UPM)
ndash Ground delays due to connectionshellip
Business Rules
euro
HORIZONTAL OPTIMISATION
TO_WPT FROM_WPT Cost
A
B
C
DEP
DEP
DEP
21
25
23
A
A
E
B
52
40
CG 45
B
B
E
F
49
53
G
G
F
J
73
79
E
E
K
H
84
75
F
F
H
I
70
67
I
I
L
M
96
85
HL 86
JM 119
KO 117
KL 109
MQ 115
LP 118
QDEST 134
OP 136
PDEST 130
Worklist
Dijkstra algorithm
DEPDEST
16
40
19
12
19
J
28
34
I14
17
O33
25
Q30
P32
F24
28
D
E
19
31
G22
A
B
C
2125
23
H
K
35
26 L
M18
29
1) Selection of segments for current from- waypoint
2) Calculation of costs for selected segments
3) Entering calculated datasets into worklist
4) Selection of best dataset from worklist
5) To- waypoint of best dataset becomes from- waypoint
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
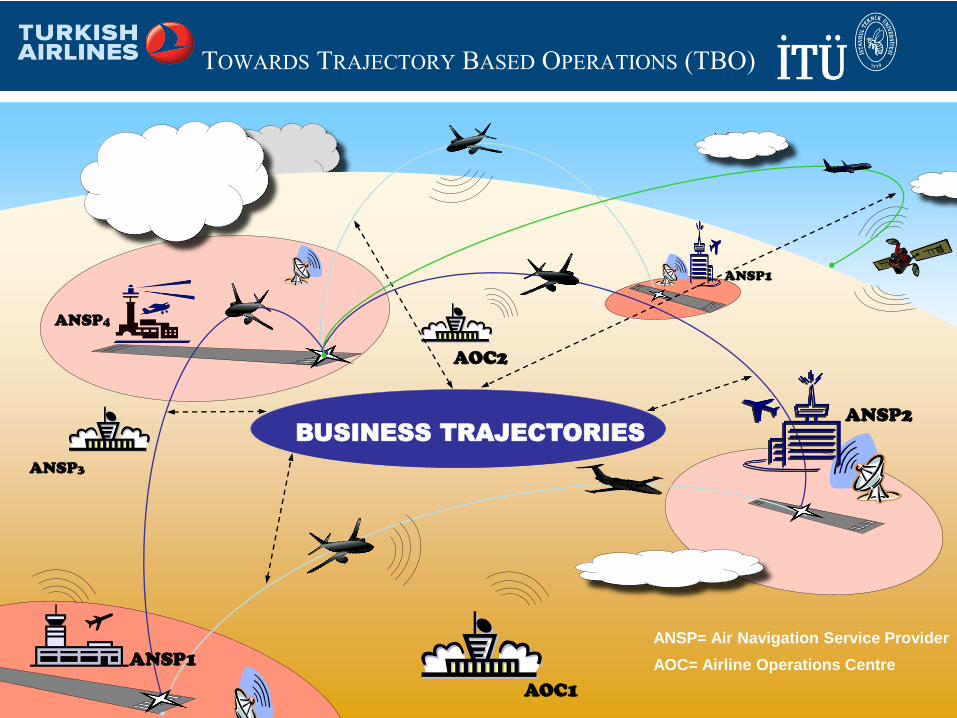
5
TOWARDS TRAJECTORY BASED OPERATIONS (TBO)
City B
AOC1
AOC2
ANSP1
ANSP2
ANSP3
ANSP4
ANSP1
BUSINESS TRAJECTORIES
ANSP= Air Navigation Service Provider
AOC= Airline Operations Centre
6
TOWARDS TBO INTEROPERABILITY AND TP SYNCHRONISATION
TRAJECTORY RELATED
INFORMATION
AOC1
AOC2
ANSP1
ANSP2
ANSP3
ANSP1
ANSP4
7
TRAJECTORY RELATED
INFORMATION
TOWARDS TBO INTEROPERABILITY AND TP SYNCHRONISATION
TP2
TPI
TP1
TPP
TP6
TPN
TP3
TPR
TP4
TPK
TP5
TPL
TPH
CDampR
ASAS
FMS
AMANFDPS
FMS
FMS
ATFM
AMAN= Arrival manager
DMAN= Departure manager
FMS= Flight Management System
FP=Flight Planning
ASAS=Airborne Separation Assurance System
ATFM=Air Traffic Flow Management
FDPS=Flight Data Processing Tool
CDampR=Conflict Detection and Resolution
Actual aircraft state
(position speed
weighthellip)
MORE TERMINOLOGY TRAJECTORY-RELATED INFORMATION
Environmental
Conditions
Pilot
Real World
Trajectory Prediction (Air or Ground)
Flight Commands
amp Guidance
Modes
Flight
Intent
Flight
Plan
Tactical
Amendments to
Flight Plan
Airborne
Automation
System
Actual
Trajectory
Aircraft
Predicted
Trajectory
Trajectory
Computation
Infrastructure
Aircraft
Intent
Intent
Generation
Infrastructure
Initial
Conditions
Trajectory Predictor (TP)
AT or ABOVE FL290
SHARING TRAJECTORY-RELATED INFORMATION
Data COM InfrastructurePredicted trajectory
information
Flight
Intent
Airborne
Predicted
Trajectory
TP PROCESS 2 (eg arrival manager)
Flight
Intent
Ground
Predicted
Trajectory
Trajectory
Computation
Infrastructure
(1)
Aircraft
Intent
Intent
Generation
Infrastructure
(1)
Airborne TP
Trajectory
Computation
Infrastructure
(2)
Aircraft
Intent
Intent
Generation
Infrastructure
(2)
Ground TP
Aircraft Intent
information
Flight Intent
Information
Trajectory Prediction (eg flight management system)
bull Two levels in the language grammar lexical and syntactical
bull Lexical Level Instructions
ndash Instructions are atomic inputs to the Trajectory Engine that capture basic
commands and guidance modes at the disposal of the pilotFMS to direct the
operation of the aircraft
bull Syntactical level Operations
ndash Operations are sets of compatible instructions that when simultaneously active
univocally determine the ensuing aircraft motion
bull With a reduced set of instructions (AIDL alphabet) any possible aircraft
operation can be formally specified in such a way that the ensuing aircraft
motion is unambiguously determined
SHARING TRAJECTORY-RELATED INFORMATION
11
Next generation
FMS
AOC 2
ATFM DST
FMS
AOC 1
FDPS
AMAN DST
Next
Generation
FDPS
Air-Air
Air-Ground
Ground-Ground
SHARING TRAJECTORY-RELATED INFORMATION
12
TRAJECTORY RELATED INFORMATION
AIRCRAFT INTENT
TP2
TPI
TPP
TPR
TPK
TP5
TPL
TPH
Translator
I-5
Translator
R-5
Translator
2-K
Translator
R-2
Translator
2-5
Translator
I-2
Translator
H-5
Translator
R-P
N (N-1) divide 2TRANSLATORS
Translator
K-P
Translator
5-K
Translator
I-R
Translator
5-P
Translator
L-5
Translator
I-H
Translator
H-L
Translator
R-K
Translator
L-P
SHARING TRAJECTORY-RELATED INFORMATION
13
TP2
TPI
TPP
TPR
TPK
TP5
TPL
TPH
Translator
L-AIDL
AIDL
Translator
5-AIDL
Translator
P-AIDL
Translator
K-AIDL
Translator
R-AIDL
Translator
2-AIDL
Translator
H-AIDL
Translator
I-AIDL
N TRANSLATORS
SHARING TRAJECTORY-RELATED INFORMATION
externalinternal
Constraints amp
Rules
Aeronautical
Nav Data
Weather
Data
Basic Flight
Data amp
Schedule
Route Type amp
Optimization
Settings
Aircraft
Performance
Data
Business Rules
euroFlight
Number
City Pair
Alternate
ADES
DOF STD
Fuel Policy AC Type
AC
Equipment
AC
Envelope
Payload
Payload -
Range
Wind
Condition
Air Pressure
Air Temp
Natural
Hazards
Stat Dyn
Routes
Fix Free
Route
Opt Criteria
Cost Index
Traffic
Rights
RNAV Rules
NOTAM
TFR
(eg RAD)
Terrain
Clearance
Terminal
Procedures
DCT
Connection
Airport
Definition
Flight
connectivity
Human Req
Time Costs
Business
Targets
Business
Constraints
Conditional
Routes
DATA TYPES
bull METARTAF
LTBA 312020Z 05006KT 030V100 CAVOK 1908 Q1018 NOSIG
TAF LTBA 311640Z 31180124 03009KT CAVOK
BECMG 01030106 SCT035
TEMPO 01080112 04015G25KT
BECMG 01140116 CAVOK
Weather
Data
METAR EXPLAINED
KTTN 051853Z 04011KT 12SM VCTS SN FZFG BKN003 OVC010 M02M02 A3006 RMK AO2 TSB40
SLP176 P0002 T10171017
bull KTTN is the ICAO identifier for the Trenton-Mercer Airport
bull 051853Z indicates the day of the month is the 5th and the time of day is 1853 ZuluUTC 653PM GMT
or 153PM Eastern Standard Time
bull 04011KT indicates the wind is from 040deg true (north east) at 11 knots (20 kmh 13 mph) In the United
States the wind direction must have a 60deg or greater variance for variable wind direction to be reported
and the wind speed must be greater than 3 knots (56 kmh 35 mph)
bull 12SM indicates the prevailing visibility is 1frasl2 mi (800 m) SM = statute mile
bull VCTS indicates a thunderstorm (TS) in the vicinity (VC) which means from 5ndash10 mi (8ndash16 km)
bull SN indicates snow is falling at a moderate intensity a preceding plus or minus sign (+-) indicates heavy
or light precipitation Without a +- sign moderate precipitation is assumed
bull FZFG indicates the presence of freezing fog
bull BKN003 OVC010 indicates a broken (58 to 78 of the sky covered) cloud layer at 300 ft (91 m) above
ground level (AGL) and an overcast (88 of the sky covered) layer at 1000 ft (300 m)
bull M02M02 indicates the temperature is minus2degC (28degF) and the dewpoint is minus2degC (28degF) An M in
front of the number indicates that the temperaturedew point is minus ie below zero (0) Celsius
bull A3006 indicates the altimeter setting is 3006 inHg (1018 hPa)
bull RMK indicates the remarks section follows
DATA TYPES
bull Aeronautical Information Manual (AIM)
ndash SID and STAR Taxi charts
Aeronautical
Nav Data
SID
STAR
DATA TYPES
bull Airspace rules
ndash Eg seperation
Constraints amp
Rules
DATA TYPES
bull Cost Index
bull Airline (User) preferred routes
ndash User Preferences Model (UPM)
Route Type amp
Optimization
Settings
COST DEFINITION
COST INDEX EXAMPLE
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
INPUTS
bull Initial conditions (IC)
bull Flight Intent (FI)
bull User Preferences Model (UPM)
ndash ie airline policy
bull Operational Context Model (OCM)
ndash rules of airpace including
STARs and SIDs
bull ie ATFM policy
ndash Aircraft Performance Model
(APM)
bull Based on BADA
ndash Weather Model (WM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Flight Intent with User Preferences Model (UPM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull FI with UPM and Operational Context Model (OCM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory with details
DATA TYPES
bull Flight Plan
bull Regulated Flight Plan
bull Actual Flight data (Current Tactical)
bull Correlated Position data
bull CDM related data
Basic Flight
Data amp
Schedule
4D TRAJECTORY DATA PROFILES
LIPEEDFMJMP803JMPD22820110301031200BB9377945220110301031500FPLFPLAFPNEXENEXENNN2011030103150020110301031500TEFINS783849NNN00ACHN
NNN600300N00N0NDCULTNRSNNK00344154791F160N0234019032500LIPELUPOS5N10A443151N0111749EY
032955DCT7518V443121N0110416E32Y 033515DCT15038V443048N0104912E67Y 033640DCT16043V443040N0104526E75Y
033830LUPOSL99516057W443017N0103453EY 034355PARL99516099N444920N0101736EY 034735MISPOL995160127W450126N0100450EY
035305BEKANL995160169W451930N0094540EY 035720TZOL995160202N453333N0093026EY 040450PEPAGN851160260W455902N0090417EY
040730ABESIN851160280W460935N0090234EY 041350PIXOSN851160329W463619N0085859EY 041800SOPERN851160361W465322N0085640EY
042155ELMURN851160391W470924N0085427EY 042350ROLSAN851160406W471723N0085321EY 042705KUDESDCT160431W473115N0085126EN
044840DCT160597V490001N0083550E76N 045435DCT75623V491355N0083323E88N
050205EDFM3650A492821N0083051EN23032500LI040545NAS443151N0111749E460244N0090341E11600267
032500LIMMFIR040545FIR443151N0111749E460244N0090341E11600267 032500LIPECR033115ES443151N0111749E443113N0110030E194023
032500LIPECTR033115AUA443151N0111749E443113N0110030E194023 033115LIPPADS033735ES443113N0110030E443029N0104009E941602350
033115LIPPC1X033735ES443113N0110030E443029N0104009E941602350 033115LIPPCTA033735AUA443113N0110030E443029N0104009E941602350
033735LIMMECTA034805AUA443029N0104009E450310N0100300E16016050131 033735LIMMES1034805ES443029N0104009E450310N0100300E16016050131
033735LIMMES1X034805ES443029N0104009E450310N0100300E16016050131 034635LIMMR60041420ES445759N0100829E463827N0085842E160160119333
034805LIMMACTA040730AUA450310N0100300E460935N0090234E160160131280 034805LIMMADE035640ES450310N0100300E453126N0093244E160160131197
035640LIMMANE040730ES453126N0093244E460935N0090234E160160197280 040545LS042705NAS460244N0090341E473115N0085126E160160267431
040545LSASFIR042705FIR460244N0090341E473115N0085126E160160267431 040730LSAZCTA042705AUA460935N0090234E473115N0085126E160160280431
040730LSAZSSL042420ES460935N0090234E471936N0085303E160160280410 041545LSTSA50P042020CRSA464419N0085754E470300N0085520E160160344379
041545LSTSA52P041620ERSA464419N0085754E464627N0085736E160160344348 041620LSTSA51P042020ERSA464627N0085736E470300N0085520E160160348379
042020LSTSA40P042115ERSA470300N0085520E470644N0085449E160160379386
042420LSAZESL042705ES471936N0085303E473115N0085126E1601604104310344157065F160N02340 F140N023493 F160N023498 F150N0234390
F100N023439778032200LIPELUPOS5N10A443151N0111749EY 032540DCT6014V443128N0110716E25Y 032730DCT6022V443115N0110115E39Y
032800DCT6824V443111N0105944E42Y 032830DCT7027V443106N0105729E47Y 032845DCT7528V443105N0105644E49Y 032855DCT7829V443103N0105558E51Y
032910DCT8030V443102N0105513E53Y 032925DCT8032V443058N0105343E56Y 032955DCT8834V443055N0105212E60Y 033035DCT10037V443050N0104957E65Y
033040DCT10038V443048N0104912E67Y 033050DCT10439V443047N0104826E68Y 033110DCT10640V443045N0104741E70Y 033150DCT10644V443038N0104441E77Y
033155DCT11045V443037N0104355E79Y 033215LUPOSL99511057W443017N0103453EY 033240DCT11071V443638N0102907E33Y
033245DCT11472V443705N0102843E36Y 033310DCT12074V443800N0102753E40Y 033335DCT12078V443948N0102615E50Y 033345DCT12479V444016N0102550E52Y
033410DCT12880V444043N0102525E55Y 033445DCT12883V444205N0102411E62Y 033500DCT13084V444232N0102346E64Y 033515DCT13087V444353N0102232E71Y
033540DCT13789V444448N0102143E76Y 033600DCT14090V444515N0102118E79Y 033620DCT14092V444609N0102029E83Y 033640DCT14493V444637N0102004E86Y
033700DCT14094V444704N0101939E88Y 033740DCT14098V444853N0101801E98Y 033755PARL99514499N444920N0101736EY
034015DCT144120V445825N0100802E75Y 034110MISPOL995145127W450126N0100450EY 034200DCT145134V450427N0100138E17Y
034215DCT150135V450452N0100111E19Y 034250DCT150140V450702N0095854E31Y 034325DCT154142V450753N0095759E36Y
034405DCT160145V450911N0095637E43Y 034425DCT160148V451028N0095515E50Y 034520DCT160155V451329N0095203E67Y
034625DCT160162V451629N0094852E83Y 034720BEKANL995160169W451930N0094540EY 035145TZOL995160202N453333N0093026EY
035700DCT160242V455107N0091224E69Y 035925PEPAGN851160260W455902N0090417EY 040205ABESIN851160280W460935N0090234EY
040715DCT160319V463052N0085943E80Y 040840PIXOSN851160329W463619N0085859EY 041315SOPERN851160361W465322N0085640EY
041720DCT160390V470852N0085431E97Y 041730ELMURN851157391W470924N0085427EY 041755DCT150393V471028N0085418E13Y
041820DCT150397V471236N0085401E40Y 041920DCT150405V471651N0085325E93Y 041935ROLSAN851147406W471723N0085321EY
042000DCT140408V471830N0085312E8Y 042125DCT140419V472436N0085221E52Y 042205DCT140425V472755N0085154E76Y
042225DCT134427V472902N0085144E84Y 042240DCT130428V472935N0085140E88Y 042320KUDESN851121431W473115N0085126EN
042435DCT100437V473343N0085439E21N 042720ROMIRN851100459W474247N0090628EN 042825VEDOKN851100468W474724N0090714EN
042905TINOXDCT100473W475007N0090740EY 044335DCT100571G484048N0084511EY 045005DCT100607V485957N0083916E68Y
045040DCT94609V490101N0083856E72Y 045100DCT94611V490205N0083836E75Y 045140DCT84614V490341N0083807E81Y 045200DCT84616V490445N0083747E85Y
045240DCT74619V490620N0083717E91Y 045345INKAMDCT54624W490900N0083628EY 045655DCT54642V491820N0083258E56Y
045950DCT16656G492536N0083015EY 050110EDFM3661A492821N0083051EY39032200LI040020NAS443151N0111749E460244N0090341E11600267
032200LIMMFIR040020FIR443151N0111749E460244N0090341E11600267 032200LIPECR033020ES443151N0111749E443052N0105042E196036
032200LIPECTR033020AUA443151N0111749E443052N0105042E196036 033020LIPPADS033205ES443052N0105042E443029N0104009E961103650
033020LIPPC1X033205ES443052N0105042E443029N0104009E961103650 033020LIPPCTA033205AUA443052N0105042E443029N0104009E961103650
033205LIMMECTA034140AUA443029N0104009E450310N0100300E11014550131 033205LIMMES1034140ES443029N0104009E450310N0100300E11014550131
4D TRAJECTORY DATA PROFILES
Tactical flight Models
bull FTFM - Filed Tactical Flight Model The FTFM is the
ldquoinitialrdquo profile as it reflects the status of the demand before
activation of the regulation plan It is computed with the latest
flight plan version sent by each AO to the CFMUIFPS
bull RTFM - Regulated Tactical Flight Model The RTFM is the
ldquoregulatedrdquo profile as it reflects the status of the demand after
activation of the regulation plan It is computed with the latest
ATFM slot (CTOT) issued to the AO by the ground
regulation system
bull CTFM - Current Tactical Flight Model The CTFM is the
ldquoactualrdquo profile as it integrates the actual entry time of the
flights in the regulated TV It is computed with the Radar
Data sent by ACCs to CFMUETFMS ref
CPG_GEN - Profiles generated by the CFMU path generation
tool
bull SCR - Shortest Constrained Route
bull SRR - Shortest RAD restriction applied Route
bull SUR - Shortest Unconstrained Route
bull DCT - Direct route
CPF - Correlated Position reports for a Flight CPRs
(Correlated Position Reports) which are surveillance data
collected from the ACCs
Filed Flight Plan
CDM
Header
Point Profile
Airspace Profile
Circle Intersection
Profile
RTFM Profile
CTFM Profile
CFP Profile
FTFM Profile
4D TRAJECTORY DATA PROFILES
Current Tactical Flight Model (CTFM) is computed with Radar Data sent by
Area Control Centers to CFMUETFMS so it can be deemed as a fused
version of FTFM with real data
ENHANCED TACTICAL FLOW MANAGEMENT SYSTEM (ETFMS) EUROCONTROL 2013
DATA TYPES
bull Base of Aircraft Data (BADA) depending on ac type
ndash Nominal control variables (BADA 3)
ndash Full flight variable envelope (BADA 4)
bull optimization
Aircraft
Performance
Data
AIRCRAFT EQUATION OF MOTION
bull equation of motion sufficient in 3 dof
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
number of parameters of the system that may vary independently
BASE OF AIRCRAFT DATA (BADA)
bull There are two families of BADA APM based on the same modelling approach and components [EUROCONTROL]
bull BADA Family 3ndash providing a 90 coverage of the current aircraft types operating
in the ECAC airspace
ndash model aircraft behaviour over the normal operations part of the flight envelope and to meet todays requirements for aircraft performance modelling and simulation
bull BADA Family 4 ndash a newly developed model intended to meet advanced functional
and precision requirements of the new ATM systems
ndash providing a 60 coverage of the current aircraft types operating in ECAC airspace
ndash BADA 4 provides accurate modelling of aircraft over the entire flight envelope and enables modelling and simulation of advanced concepts of future systems
AIRCRAFT PERFORMANCE MODEL
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
BADA AIRCRAFT LIMITATION MODEL
DATA TYPES
bull Business objectives
ndash Cost Index
ndash User Preferences Model (UPM)
ndash Ground delays due to connectionshellip
Business Rules
euro
HORIZONTAL OPTIMISATION
TO_WPT FROM_WPT Cost
A
B
C
DEP
DEP
DEP
21
25
23
A
A
E
B
52
40
CG 45
B
B
E
F
49
53
G
G
F
J
73
79
E
E
K
H
84
75
F
F
H
I
70
67
I
I
L
M
96
85
HL 86
JM 119
KO 117
KL 109
MQ 115
LP 118
QDEST 134
OP 136
PDEST 130
Worklist
Dijkstra algorithm
DEPDEST
16
40
19
12
19
J
28
34
I14
17
O33
25
Q30
P32
F24
28
D
E
19
31
G22
A
B
C
2125
23
H
K
35
26 L
M18
29
1) Selection of segments for current from- waypoint
2) Calculation of costs for selected segments
3) Entering calculated datasets into worklist
4) Selection of best dataset from worklist
5) To- waypoint of best dataset becomes from- waypoint
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
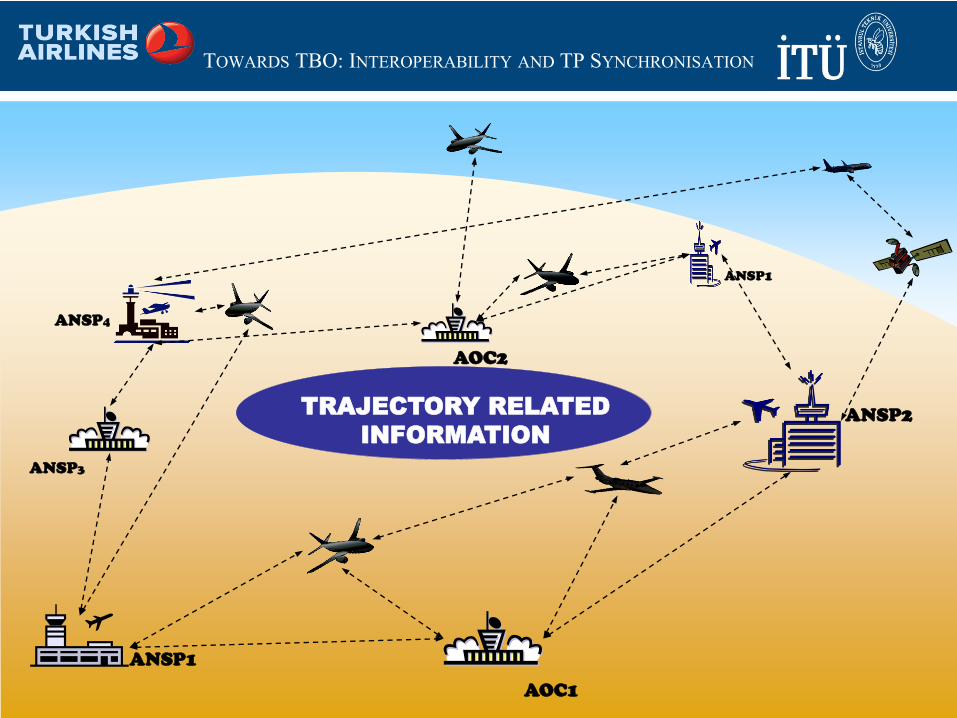
6
TOWARDS TBO INTEROPERABILITY AND TP SYNCHRONISATION
TRAJECTORY RELATED
INFORMATION
AOC1
AOC2
ANSP1
ANSP2
ANSP3
ANSP1
ANSP4
7
TRAJECTORY RELATED
INFORMATION
TOWARDS TBO INTEROPERABILITY AND TP SYNCHRONISATION
TP2
TPI
TP1
TPP
TP6
TPN
TP3
TPR
TP4
TPK
TP5
TPL
TPH
CDampR
ASAS
FMS
AMANFDPS
FMS
FMS
ATFM
AMAN= Arrival manager
DMAN= Departure manager
FMS= Flight Management System
FP=Flight Planning
ASAS=Airborne Separation Assurance System
ATFM=Air Traffic Flow Management
FDPS=Flight Data Processing Tool
CDampR=Conflict Detection and Resolution
Actual aircraft state
(position speed
weighthellip)
MORE TERMINOLOGY TRAJECTORY-RELATED INFORMATION
Environmental
Conditions
Pilot
Real World
Trajectory Prediction (Air or Ground)
Flight Commands
amp Guidance
Modes
Flight
Intent
Flight
Plan
Tactical
Amendments to
Flight Plan
Airborne
Automation
System
Actual
Trajectory
Aircraft
Predicted
Trajectory
Trajectory
Computation
Infrastructure
Aircraft
Intent
Intent
Generation
Infrastructure
Initial
Conditions
Trajectory Predictor (TP)
AT or ABOVE FL290
SHARING TRAJECTORY-RELATED INFORMATION
Data COM InfrastructurePredicted trajectory
information
Flight
Intent
Airborne
Predicted
Trajectory
TP PROCESS 2 (eg arrival manager)
Flight
Intent
Ground
Predicted
Trajectory
Trajectory
Computation
Infrastructure
(1)
Aircraft
Intent
Intent
Generation
Infrastructure
(1)
Airborne TP
Trajectory
Computation
Infrastructure
(2)
Aircraft
Intent
Intent
Generation
Infrastructure
(2)
Ground TP
Aircraft Intent
information
Flight Intent
Information
Trajectory Prediction (eg flight management system)
bull Two levels in the language grammar lexical and syntactical
bull Lexical Level Instructions
ndash Instructions are atomic inputs to the Trajectory Engine that capture basic
commands and guidance modes at the disposal of the pilotFMS to direct the
operation of the aircraft
bull Syntactical level Operations
ndash Operations are sets of compatible instructions that when simultaneously active
univocally determine the ensuing aircraft motion
bull With a reduced set of instructions (AIDL alphabet) any possible aircraft
operation can be formally specified in such a way that the ensuing aircraft
motion is unambiguously determined
SHARING TRAJECTORY-RELATED INFORMATION
11
Next generation
FMS
AOC 2
ATFM DST
FMS
AOC 1
FDPS
AMAN DST
Next
Generation
FDPS
Air-Air
Air-Ground
Ground-Ground
SHARING TRAJECTORY-RELATED INFORMATION
12
TRAJECTORY RELATED INFORMATION
AIRCRAFT INTENT
TP2
TPI
TPP
TPR
TPK
TP5
TPL
TPH
Translator
I-5
Translator
R-5
Translator
2-K
Translator
R-2
Translator
2-5
Translator
I-2
Translator
H-5
Translator
R-P
N (N-1) divide 2TRANSLATORS
Translator
K-P
Translator
5-K
Translator
I-R
Translator
5-P
Translator
L-5
Translator
I-H
Translator
H-L
Translator
R-K
Translator
L-P
SHARING TRAJECTORY-RELATED INFORMATION
13
TP2
TPI
TPP
TPR
TPK
TP5
TPL
TPH
Translator
L-AIDL
AIDL
Translator
5-AIDL
Translator
P-AIDL
Translator
K-AIDL
Translator
R-AIDL
Translator
2-AIDL
Translator
H-AIDL
Translator
I-AIDL
N TRANSLATORS
SHARING TRAJECTORY-RELATED INFORMATION
externalinternal
Constraints amp
Rules
Aeronautical
Nav Data
Weather
Data
Basic Flight
Data amp
Schedule
Route Type amp
Optimization
Settings
Aircraft
Performance
Data
Business Rules
euroFlight
Number
City Pair
Alternate
ADES
DOF STD
Fuel Policy AC Type
AC
Equipment
AC
Envelope
Payload
Payload -
Range
Wind
Condition
Air Pressure
Air Temp
Natural
Hazards
Stat Dyn
Routes
Fix Free
Route
Opt Criteria
Cost Index
Traffic
Rights
RNAV Rules
NOTAM
TFR
(eg RAD)
Terrain
Clearance
Terminal
Procedures
DCT
Connection
Airport
Definition
Flight
connectivity
Human Req
Time Costs
Business
Targets
Business
Constraints
Conditional
Routes
DATA TYPES
bull METARTAF
LTBA 312020Z 05006KT 030V100 CAVOK 1908 Q1018 NOSIG
TAF LTBA 311640Z 31180124 03009KT CAVOK
BECMG 01030106 SCT035
TEMPO 01080112 04015G25KT
BECMG 01140116 CAVOK
Weather
Data
METAR EXPLAINED
KTTN 051853Z 04011KT 12SM VCTS SN FZFG BKN003 OVC010 M02M02 A3006 RMK AO2 TSB40
SLP176 P0002 T10171017
bull KTTN is the ICAO identifier for the Trenton-Mercer Airport
bull 051853Z indicates the day of the month is the 5th and the time of day is 1853 ZuluUTC 653PM GMT
or 153PM Eastern Standard Time
bull 04011KT indicates the wind is from 040deg true (north east) at 11 knots (20 kmh 13 mph) In the United
States the wind direction must have a 60deg or greater variance for variable wind direction to be reported
and the wind speed must be greater than 3 knots (56 kmh 35 mph)
bull 12SM indicates the prevailing visibility is 1frasl2 mi (800 m) SM = statute mile
bull VCTS indicates a thunderstorm (TS) in the vicinity (VC) which means from 5ndash10 mi (8ndash16 km)
bull SN indicates snow is falling at a moderate intensity a preceding plus or minus sign (+-) indicates heavy
or light precipitation Without a +- sign moderate precipitation is assumed
bull FZFG indicates the presence of freezing fog
bull BKN003 OVC010 indicates a broken (58 to 78 of the sky covered) cloud layer at 300 ft (91 m) above
ground level (AGL) and an overcast (88 of the sky covered) layer at 1000 ft (300 m)
bull M02M02 indicates the temperature is minus2degC (28degF) and the dewpoint is minus2degC (28degF) An M in
front of the number indicates that the temperaturedew point is minus ie below zero (0) Celsius
bull A3006 indicates the altimeter setting is 3006 inHg (1018 hPa)
bull RMK indicates the remarks section follows
DATA TYPES
bull Aeronautical Information Manual (AIM)
ndash SID and STAR Taxi charts
Aeronautical
Nav Data
SID
STAR
DATA TYPES
bull Airspace rules
ndash Eg seperation
Constraints amp
Rules
DATA TYPES
bull Cost Index
bull Airline (User) preferred routes
ndash User Preferences Model (UPM)
Route Type amp
Optimization
Settings
COST DEFINITION
COST INDEX EXAMPLE
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
INPUTS
bull Initial conditions (IC)
bull Flight Intent (FI)
bull User Preferences Model (UPM)
ndash ie airline policy
bull Operational Context Model (OCM)
ndash rules of airpace including
STARs and SIDs
bull ie ATFM policy
ndash Aircraft Performance Model
(APM)
bull Based on BADA
ndash Weather Model (WM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Flight Intent with User Preferences Model (UPM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull FI with UPM and Operational Context Model (OCM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory with details
DATA TYPES
bull Flight Plan
bull Regulated Flight Plan
bull Actual Flight data (Current Tactical)
bull Correlated Position data
bull CDM related data
Basic Flight
Data amp
Schedule
4D TRAJECTORY DATA PROFILES
LIPEEDFMJMP803JMPD22820110301031200BB9377945220110301031500FPLFPLAFPNEXENEXENNN2011030103150020110301031500TEFINS783849NNN00ACHN
NNN600300N00N0NDCULTNRSNNK00344154791F160N0234019032500LIPELUPOS5N10A443151N0111749EY
032955DCT7518V443121N0110416E32Y 033515DCT15038V443048N0104912E67Y 033640DCT16043V443040N0104526E75Y
033830LUPOSL99516057W443017N0103453EY 034355PARL99516099N444920N0101736EY 034735MISPOL995160127W450126N0100450EY
035305BEKANL995160169W451930N0094540EY 035720TZOL995160202N453333N0093026EY 040450PEPAGN851160260W455902N0090417EY
040730ABESIN851160280W460935N0090234EY 041350PIXOSN851160329W463619N0085859EY 041800SOPERN851160361W465322N0085640EY
042155ELMURN851160391W470924N0085427EY 042350ROLSAN851160406W471723N0085321EY 042705KUDESDCT160431W473115N0085126EN
044840DCT160597V490001N0083550E76N 045435DCT75623V491355N0083323E88N
050205EDFM3650A492821N0083051EN23032500LI040545NAS443151N0111749E460244N0090341E11600267
032500LIMMFIR040545FIR443151N0111749E460244N0090341E11600267 032500LIPECR033115ES443151N0111749E443113N0110030E194023
032500LIPECTR033115AUA443151N0111749E443113N0110030E194023 033115LIPPADS033735ES443113N0110030E443029N0104009E941602350
033115LIPPC1X033735ES443113N0110030E443029N0104009E941602350 033115LIPPCTA033735AUA443113N0110030E443029N0104009E941602350
033735LIMMECTA034805AUA443029N0104009E450310N0100300E16016050131 033735LIMMES1034805ES443029N0104009E450310N0100300E16016050131
033735LIMMES1X034805ES443029N0104009E450310N0100300E16016050131 034635LIMMR60041420ES445759N0100829E463827N0085842E160160119333
034805LIMMACTA040730AUA450310N0100300E460935N0090234E160160131280 034805LIMMADE035640ES450310N0100300E453126N0093244E160160131197
035640LIMMANE040730ES453126N0093244E460935N0090234E160160197280 040545LS042705NAS460244N0090341E473115N0085126E160160267431
040545LSASFIR042705FIR460244N0090341E473115N0085126E160160267431 040730LSAZCTA042705AUA460935N0090234E473115N0085126E160160280431
040730LSAZSSL042420ES460935N0090234E471936N0085303E160160280410 041545LSTSA50P042020CRSA464419N0085754E470300N0085520E160160344379
041545LSTSA52P041620ERSA464419N0085754E464627N0085736E160160344348 041620LSTSA51P042020ERSA464627N0085736E470300N0085520E160160348379
042020LSTSA40P042115ERSA470300N0085520E470644N0085449E160160379386
042420LSAZESL042705ES471936N0085303E473115N0085126E1601604104310344157065F160N02340 F140N023493 F160N023498 F150N0234390
F100N023439778032200LIPELUPOS5N10A443151N0111749EY 032540DCT6014V443128N0110716E25Y 032730DCT6022V443115N0110115E39Y
032800DCT6824V443111N0105944E42Y 032830DCT7027V443106N0105729E47Y 032845DCT7528V443105N0105644E49Y 032855DCT7829V443103N0105558E51Y
032910DCT8030V443102N0105513E53Y 032925DCT8032V443058N0105343E56Y 032955DCT8834V443055N0105212E60Y 033035DCT10037V443050N0104957E65Y
033040DCT10038V443048N0104912E67Y 033050DCT10439V443047N0104826E68Y 033110DCT10640V443045N0104741E70Y 033150DCT10644V443038N0104441E77Y
033155DCT11045V443037N0104355E79Y 033215LUPOSL99511057W443017N0103453EY 033240DCT11071V443638N0102907E33Y
033245DCT11472V443705N0102843E36Y 033310DCT12074V443800N0102753E40Y 033335DCT12078V443948N0102615E50Y 033345DCT12479V444016N0102550E52Y
033410DCT12880V444043N0102525E55Y 033445DCT12883V444205N0102411E62Y 033500DCT13084V444232N0102346E64Y 033515DCT13087V444353N0102232E71Y
033540DCT13789V444448N0102143E76Y 033600DCT14090V444515N0102118E79Y 033620DCT14092V444609N0102029E83Y 033640DCT14493V444637N0102004E86Y
033700DCT14094V444704N0101939E88Y 033740DCT14098V444853N0101801E98Y 033755PARL99514499N444920N0101736EY
034015DCT144120V445825N0100802E75Y 034110MISPOL995145127W450126N0100450EY 034200DCT145134V450427N0100138E17Y
034215DCT150135V450452N0100111E19Y 034250DCT150140V450702N0095854E31Y 034325DCT154142V450753N0095759E36Y
034405DCT160145V450911N0095637E43Y 034425DCT160148V451028N0095515E50Y 034520DCT160155V451329N0095203E67Y
034625DCT160162V451629N0094852E83Y 034720BEKANL995160169W451930N0094540EY 035145TZOL995160202N453333N0093026EY
035700DCT160242V455107N0091224E69Y 035925PEPAGN851160260W455902N0090417EY 040205ABESIN851160280W460935N0090234EY
040715DCT160319V463052N0085943E80Y 040840PIXOSN851160329W463619N0085859EY 041315SOPERN851160361W465322N0085640EY
041720DCT160390V470852N0085431E97Y 041730ELMURN851157391W470924N0085427EY 041755DCT150393V471028N0085418E13Y
041820DCT150397V471236N0085401E40Y 041920DCT150405V471651N0085325E93Y 041935ROLSAN851147406W471723N0085321EY
042000DCT140408V471830N0085312E8Y 042125DCT140419V472436N0085221E52Y 042205DCT140425V472755N0085154E76Y
042225DCT134427V472902N0085144E84Y 042240DCT130428V472935N0085140E88Y 042320KUDESN851121431W473115N0085126EN
042435DCT100437V473343N0085439E21N 042720ROMIRN851100459W474247N0090628EN 042825VEDOKN851100468W474724N0090714EN
042905TINOXDCT100473W475007N0090740EY 044335DCT100571G484048N0084511EY 045005DCT100607V485957N0083916E68Y
045040DCT94609V490101N0083856E72Y 045100DCT94611V490205N0083836E75Y 045140DCT84614V490341N0083807E81Y 045200DCT84616V490445N0083747E85Y
045240DCT74619V490620N0083717E91Y 045345INKAMDCT54624W490900N0083628EY 045655DCT54642V491820N0083258E56Y
045950DCT16656G492536N0083015EY 050110EDFM3661A492821N0083051EY39032200LI040020NAS443151N0111749E460244N0090341E11600267
032200LIMMFIR040020FIR443151N0111749E460244N0090341E11600267 032200LIPECR033020ES443151N0111749E443052N0105042E196036
032200LIPECTR033020AUA443151N0111749E443052N0105042E196036 033020LIPPADS033205ES443052N0105042E443029N0104009E961103650
033020LIPPC1X033205ES443052N0105042E443029N0104009E961103650 033020LIPPCTA033205AUA443052N0105042E443029N0104009E961103650
033205LIMMECTA034140AUA443029N0104009E450310N0100300E11014550131 033205LIMMES1034140ES443029N0104009E450310N0100300E11014550131
4D TRAJECTORY DATA PROFILES
Tactical flight Models
bull FTFM - Filed Tactical Flight Model The FTFM is the
ldquoinitialrdquo profile as it reflects the status of the demand before
activation of the regulation plan It is computed with the latest
flight plan version sent by each AO to the CFMUIFPS
bull RTFM - Regulated Tactical Flight Model The RTFM is the
ldquoregulatedrdquo profile as it reflects the status of the demand after
activation of the regulation plan It is computed with the latest
ATFM slot (CTOT) issued to the AO by the ground
regulation system
bull CTFM - Current Tactical Flight Model The CTFM is the
ldquoactualrdquo profile as it integrates the actual entry time of the
flights in the regulated TV It is computed with the Radar
Data sent by ACCs to CFMUETFMS ref
CPG_GEN - Profiles generated by the CFMU path generation
tool
bull SCR - Shortest Constrained Route
bull SRR - Shortest RAD restriction applied Route
bull SUR - Shortest Unconstrained Route
bull DCT - Direct route
CPF - Correlated Position reports for a Flight CPRs
(Correlated Position Reports) which are surveillance data
collected from the ACCs
Filed Flight Plan
CDM
Header
Point Profile
Airspace Profile
Circle Intersection
Profile
RTFM Profile
CTFM Profile
CFP Profile
FTFM Profile
4D TRAJECTORY DATA PROFILES
Current Tactical Flight Model (CTFM) is computed with Radar Data sent by
Area Control Centers to CFMUETFMS so it can be deemed as a fused
version of FTFM with real data
ENHANCED TACTICAL FLOW MANAGEMENT SYSTEM (ETFMS) EUROCONTROL 2013
DATA TYPES
bull Base of Aircraft Data (BADA) depending on ac type
ndash Nominal control variables (BADA 3)
ndash Full flight variable envelope (BADA 4)
bull optimization
Aircraft
Performance
Data
AIRCRAFT EQUATION OF MOTION
bull equation of motion sufficient in 3 dof
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
number of parameters of the system that may vary independently
BASE OF AIRCRAFT DATA (BADA)
bull There are two families of BADA APM based on the same modelling approach and components [EUROCONTROL]
bull BADA Family 3ndash providing a 90 coverage of the current aircraft types operating
in the ECAC airspace
ndash model aircraft behaviour over the normal operations part of the flight envelope and to meet todays requirements for aircraft performance modelling and simulation
bull BADA Family 4 ndash a newly developed model intended to meet advanced functional
and precision requirements of the new ATM systems
ndash providing a 60 coverage of the current aircraft types operating in ECAC airspace
ndash BADA 4 provides accurate modelling of aircraft over the entire flight envelope and enables modelling and simulation of advanced concepts of future systems
AIRCRAFT PERFORMANCE MODEL
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
BADA AIRCRAFT LIMITATION MODEL
DATA TYPES
bull Business objectives
ndash Cost Index
ndash User Preferences Model (UPM)
ndash Ground delays due to connectionshellip
Business Rules
euro
HORIZONTAL OPTIMISATION
TO_WPT FROM_WPT Cost
A
B
C
DEP
DEP
DEP
21
25
23
A
A
E
B
52
40
CG 45
B
B
E
F
49
53
G
G
F
J
73
79
E
E
K
H
84
75
F
F
H
I
70
67
I
I
L
M
96
85
HL 86
JM 119
KO 117
KL 109
MQ 115
LP 118
QDEST 134
OP 136
PDEST 130
Worklist
Dijkstra algorithm
DEPDEST
16
40
19
12
19
J
28
34
I14
17
O33
25
Q30
P32
F24
28
D
E
19
31
G22
A
B
C
2125
23
H
K
35
26 L
M18
29
1) Selection of segments for current from- waypoint
2) Calculation of costs for selected segments
3) Entering calculated datasets into worklist
4) Selection of best dataset from worklist
5) To- waypoint of best dataset becomes from- waypoint
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
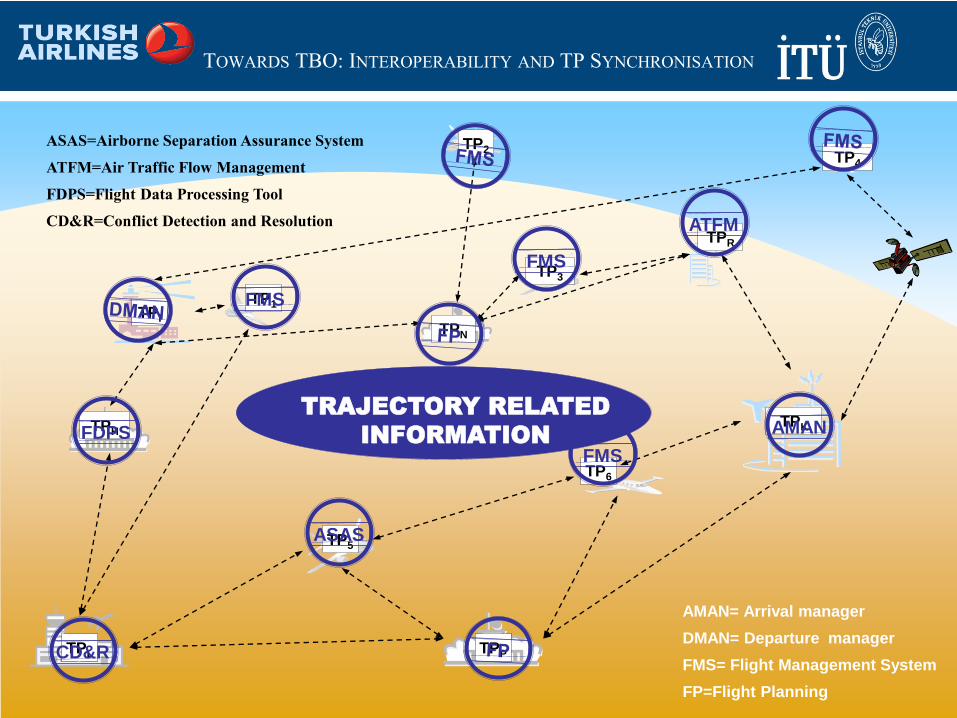
7
TRAJECTORY RELATED
INFORMATION
TOWARDS TBO INTEROPERABILITY AND TP SYNCHRONISATION
TP2
TPI
TP1
TPP
TP6
TPN
TP3
TPR
TP4
TPK
TP5
TPL
TPH
CDampR
ASAS
FMS
AMANFDPS
FMS
FMS
ATFM
AMAN= Arrival manager
DMAN= Departure manager
FMS= Flight Management System
FP=Flight Planning
ASAS=Airborne Separation Assurance System
ATFM=Air Traffic Flow Management
FDPS=Flight Data Processing Tool
CDampR=Conflict Detection and Resolution
Actual aircraft state
(position speed
weighthellip)
MORE TERMINOLOGY TRAJECTORY-RELATED INFORMATION
Environmental
Conditions
Pilot
Real World
Trajectory Prediction (Air or Ground)
Flight Commands
amp Guidance
Modes
Flight
Intent
Flight
Plan
Tactical
Amendments to
Flight Plan
Airborne
Automation
System
Actual
Trajectory
Aircraft
Predicted
Trajectory
Trajectory
Computation
Infrastructure
Aircraft
Intent
Intent
Generation
Infrastructure
Initial
Conditions
Trajectory Predictor (TP)
AT or ABOVE FL290
SHARING TRAJECTORY-RELATED INFORMATION
Data COM InfrastructurePredicted trajectory
information
Flight
Intent
Airborne
Predicted
Trajectory
TP PROCESS 2 (eg arrival manager)
Flight
Intent
Ground
Predicted
Trajectory
Trajectory
Computation
Infrastructure
(1)
Aircraft
Intent
Intent
Generation
Infrastructure
(1)
Airborne TP
Trajectory
Computation
Infrastructure
(2)
Aircraft
Intent
Intent
Generation
Infrastructure
(2)
Ground TP
Aircraft Intent
information
Flight Intent
Information
Trajectory Prediction (eg flight management system)
bull Two levels in the language grammar lexical and syntactical
bull Lexical Level Instructions
ndash Instructions are atomic inputs to the Trajectory Engine that capture basic
commands and guidance modes at the disposal of the pilotFMS to direct the
operation of the aircraft
bull Syntactical level Operations
ndash Operations are sets of compatible instructions that when simultaneously active
univocally determine the ensuing aircraft motion
bull With a reduced set of instructions (AIDL alphabet) any possible aircraft
operation can be formally specified in such a way that the ensuing aircraft
motion is unambiguously determined
SHARING TRAJECTORY-RELATED INFORMATION
11
Next generation
FMS
AOC 2
ATFM DST
FMS
AOC 1
FDPS
AMAN DST
Next
Generation
FDPS
Air-Air
Air-Ground
Ground-Ground
SHARING TRAJECTORY-RELATED INFORMATION
12
TRAJECTORY RELATED INFORMATION
AIRCRAFT INTENT
TP2
TPI
TPP
TPR
TPK
TP5
TPL
TPH
Translator
I-5
Translator
R-5
Translator
2-K
Translator
R-2
Translator
2-5
Translator
I-2
Translator
H-5
Translator
R-P
N (N-1) divide 2TRANSLATORS
Translator
K-P
Translator
5-K
Translator
I-R
Translator
5-P
Translator
L-5
Translator
I-H
Translator
H-L
Translator
R-K
Translator
L-P
SHARING TRAJECTORY-RELATED INFORMATION
13
TP2
TPI
TPP
TPR
TPK
TP5
TPL
TPH
Translator
L-AIDL
AIDL
Translator
5-AIDL
Translator
P-AIDL
Translator
K-AIDL
Translator
R-AIDL
Translator
2-AIDL
Translator
H-AIDL
Translator
I-AIDL
N TRANSLATORS
SHARING TRAJECTORY-RELATED INFORMATION
externalinternal
Constraints amp
Rules
Aeronautical
Nav Data
Weather
Data
Basic Flight
Data amp
Schedule
Route Type amp
Optimization
Settings
Aircraft
Performance
Data
Business Rules
euroFlight
Number
City Pair
Alternate
ADES
DOF STD
Fuel Policy AC Type
AC
Equipment
AC
Envelope
Payload
Payload -
Range
Wind
Condition
Air Pressure
Air Temp
Natural
Hazards
Stat Dyn
Routes
Fix Free
Route
Opt Criteria
Cost Index
Traffic
Rights
RNAV Rules
NOTAM
TFR
(eg RAD)
Terrain
Clearance
Terminal
Procedures
DCT
Connection
Airport
Definition
Flight
connectivity
Human Req
Time Costs
Business
Targets
Business
Constraints
Conditional
Routes
DATA TYPES
bull METARTAF
LTBA 312020Z 05006KT 030V100 CAVOK 1908 Q1018 NOSIG
TAF LTBA 311640Z 31180124 03009KT CAVOK
BECMG 01030106 SCT035
TEMPO 01080112 04015G25KT
BECMG 01140116 CAVOK
Weather
Data
METAR EXPLAINED
KTTN 051853Z 04011KT 12SM VCTS SN FZFG BKN003 OVC010 M02M02 A3006 RMK AO2 TSB40
SLP176 P0002 T10171017
bull KTTN is the ICAO identifier for the Trenton-Mercer Airport
bull 051853Z indicates the day of the month is the 5th and the time of day is 1853 ZuluUTC 653PM GMT
or 153PM Eastern Standard Time
bull 04011KT indicates the wind is from 040deg true (north east) at 11 knots (20 kmh 13 mph) In the United
States the wind direction must have a 60deg or greater variance for variable wind direction to be reported
and the wind speed must be greater than 3 knots (56 kmh 35 mph)
bull 12SM indicates the prevailing visibility is 1frasl2 mi (800 m) SM = statute mile
bull VCTS indicates a thunderstorm (TS) in the vicinity (VC) which means from 5ndash10 mi (8ndash16 km)
bull SN indicates snow is falling at a moderate intensity a preceding plus or minus sign (+-) indicates heavy
or light precipitation Without a +- sign moderate precipitation is assumed
bull FZFG indicates the presence of freezing fog
bull BKN003 OVC010 indicates a broken (58 to 78 of the sky covered) cloud layer at 300 ft (91 m) above
ground level (AGL) and an overcast (88 of the sky covered) layer at 1000 ft (300 m)
bull M02M02 indicates the temperature is minus2degC (28degF) and the dewpoint is minus2degC (28degF) An M in
front of the number indicates that the temperaturedew point is minus ie below zero (0) Celsius
bull A3006 indicates the altimeter setting is 3006 inHg (1018 hPa)
bull RMK indicates the remarks section follows
DATA TYPES
bull Aeronautical Information Manual (AIM)
ndash SID and STAR Taxi charts
Aeronautical
Nav Data
SID
STAR
DATA TYPES
bull Airspace rules
ndash Eg seperation
Constraints amp
Rules
DATA TYPES
bull Cost Index
bull Airline (User) preferred routes
ndash User Preferences Model (UPM)
Route Type amp
Optimization
Settings
COST DEFINITION
COST INDEX EXAMPLE
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
INPUTS
bull Initial conditions (IC)
bull Flight Intent (FI)
bull User Preferences Model (UPM)
ndash ie airline policy
bull Operational Context Model (OCM)
ndash rules of airpace including
STARs and SIDs
bull ie ATFM policy
ndash Aircraft Performance Model
(APM)
bull Based on BADA
ndash Weather Model (WM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Flight Intent with User Preferences Model (UPM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull FI with UPM and Operational Context Model (OCM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory with details
DATA TYPES
bull Flight Plan
bull Regulated Flight Plan
bull Actual Flight data (Current Tactical)
bull Correlated Position data
bull CDM related data
Basic Flight
Data amp
Schedule
4D TRAJECTORY DATA PROFILES
LIPEEDFMJMP803JMPD22820110301031200BB9377945220110301031500FPLFPLAFPNEXENEXENNN2011030103150020110301031500TEFINS783849NNN00ACHN
NNN600300N00N0NDCULTNRSNNK00344154791F160N0234019032500LIPELUPOS5N10A443151N0111749EY
032955DCT7518V443121N0110416E32Y 033515DCT15038V443048N0104912E67Y 033640DCT16043V443040N0104526E75Y
033830LUPOSL99516057W443017N0103453EY 034355PARL99516099N444920N0101736EY 034735MISPOL995160127W450126N0100450EY
035305BEKANL995160169W451930N0094540EY 035720TZOL995160202N453333N0093026EY 040450PEPAGN851160260W455902N0090417EY
040730ABESIN851160280W460935N0090234EY 041350PIXOSN851160329W463619N0085859EY 041800SOPERN851160361W465322N0085640EY
042155ELMURN851160391W470924N0085427EY 042350ROLSAN851160406W471723N0085321EY 042705KUDESDCT160431W473115N0085126EN
044840DCT160597V490001N0083550E76N 045435DCT75623V491355N0083323E88N
050205EDFM3650A492821N0083051EN23032500LI040545NAS443151N0111749E460244N0090341E11600267
032500LIMMFIR040545FIR443151N0111749E460244N0090341E11600267 032500LIPECR033115ES443151N0111749E443113N0110030E194023
032500LIPECTR033115AUA443151N0111749E443113N0110030E194023 033115LIPPADS033735ES443113N0110030E443029N0104009E941602350
033115LIPPC1X033735ES443113N0110030E443029N0104009E941602350 033115LIPPCTA033735AUA443113N0110030E443029N0104009E941602350
033735LIMMECTA034805AUA443029N0104009E450310N0100300E16016050131 033735LIMMES1034805ES443029N0104009E450310N0100300E16016050131
033735LIMMES1X034805ES443029N0104009E450310N0100300E16016050131 034635LIMMR60041420ES445759N0100829E463827N0085842E160160119333
034805LIMMACTA040730AUA450310N0100300E460935N0090234E160160131280 034805LIMMADE035640ES450310N0100300E453126N0093244E160160131197
035640LIMMANE040730ES453126N0093244E460935N0090234E160160197280 040545LS042705NAS460244N0090341E473115N0085126E160160267431
040545LSASFIR042705FIR460244N0090341E473115N0085126E160160267431 040730LSAZCTA042705AUA460935N0090234E473115N0085126E160160280431
040730LSAZSSL042420ES460935N0090234E471936N0085303E160160280410 041545LSTSA50P042020CRSA464419N0085754E470300N0085520E160160344379
041545LSTSA52P041620ERSA464419N0085754E464627N0085736E160160344348 041620LSTSA51P042020ERSA464627N0085736E470300N0085520E160160348379
042020LSTSA40P042115ERSA470300N0085520E470644N0085449E160160379386
042420LSAZESL042705ES471936N0085303E473115N0085126E1601604104310344157065F160N02340 F140N023493 F160N023498 F150N0234390
F100N023439778032200LIPELUPOS5N10A443151N0111749EY 032540DCT6014V443128N0110716E25Y 032730DCT6022V443115N0110115E39Y
032800DCT6824V443111N0105944E42Y 032830DCT7027V443106N0105729E47Y 032845DCT7528V443105N0105644E49Y 032855DCT7829V443103N0105558E51Y
032910DCT8030V443102N0105513E53Y 032925DCT8032V443058N0105343E56Y 032955DCT8834V443055N0105212E60Y 033035DCT10037V443050N0104957E65Y
033040DCT10038V443048N0104912E67Y 033050DCT10439V443047N0104826E68Y 033110DCT10640V443045N0104741E70Y 033150DCT10644V443038N0104441E77Y
033155DCT11045V443037N0104355E79Y 033215LUPOSL99511057W443017N0103453EY 033240DCT11071V443638N0102907E33Y
033245DCT11472V443705N0102843E36Y 033310DCT12074V443800N0102753E40Y 033335DCT12078V443948N0102615E50Y 033345DCT12479V444016N0102550E52Y
033410DCT12880V444043N0102525E55Y 033445DCT12883V444205N0102411E62Y 033500DCT13084V444232N0102346E64Y 033515DCT13087V444353N0102232E71Y
033540DCT13789V444448N0102143E76Y 033600DCT14090V444515N0102118E79Y 033620DCT14092V444609N0102029E83Y 033640DCT14493V444637N0102004E86Y
033700DCT14094V444704N0101939E88Y 033740DCT14098V444853N0101801E98Y 033755PARL99514499N444920N0101736EY
034015DCT144120V445825N0100802E75Y 034110MISPOL995145127W450126N0100450EY 034200DCT145134V450427N0100138E17Y
034215DCT150135V450452N0100111E19Y 034250DCT150140V450702N0095854E31Y 034325DCT154142V450753N0095759E36Y
034405DCT160145V450911N0095637E43Y 034425DCT160148V451028N0095515E50Y 034520DCT160155V451329N0095203E67Y
034625DCT160162V451629N0094852E83Y 034720BEKANL995160169W451930N0094540EY 035145TZOL995160202N453333N0093026EY
035700DCT160242V455107N0091224E69Y 035925PEPAGN851160260W455902N0090417EY 040205ABESIN851160280W460935N0090234EY
040715DCT160319V463052N0085943E80Y 040840PIXOSN851160329W463619N0085859EY 041315SOPERN851160361W465322N0085640EY
041720DCT160390V470852N0085431E97Y 041730ELMURN851157391W470924N0085427EY 041755DCT150393V471028N0085418E13Y
041820DCT150397V471236N0085401E40Y 041920DCT150405V471651N0085325E93Y 041935ROLSAN851147406W471723N0085321EY
042000DCT140408V471830N0085312E8Y 042125DCT140419V472436N0085221E52Y 042205DCT140425V472755N0085154E76Y
042225DCT134427V472902N0085144E84Y 042240DCT130428V472935N0085140E88Y 042320KUDESN851121431W473115N0085126EN
042435DCT100437V473343N0085439E21N 042720ROMIRN851100459W474247N0090628EN 042825VEDOKN851100468W474724N0090714EN
042905TINOXDCT100473W475007N0090740EY 044335DCT100571G484048N0084511EY 045005DCT100607V485957N0083916E68Y
045040DCT94609V490101N0083856E72Y 045100DCT94611V490205N0083836E75Y 045140DCT84614V490341N0083807E81Y 045200DCT84616V490445N0083747E85Y
045240DCT74619V490620N0083717E91Y 045345INKAMDCT54624W490900N0083628EY 045655DCT54642V491820N0083258E56Y
045950DCT16656G492536N0083015EY 050110EDFM3661A492821N0083051EY39032200LI040020NAS443151N0111749E460244N0090341E11600267
032200LIMMFIR040020FIR443151N0111749E460244N0090341E11600267 032200LIPECR033020ES443151N0111749E443052N0105042E196036
032200LIPECTR033020AUA443151N0111749E443052N0105042E196036 033020LIPPADS033205ES443052N0105042E443029N0104009E961103650
033020LIPPC1X033205ES443052N0105042E443029N0104009E961103650 033020LIPPCTA033205AUA443052N0105042E443029N0104009E961103650
033205LIMMECTA034140AUA443029N0104009E450310N0100300E11014550131 033205LIMMES1034140ES443029N0104009E450310N0100300E11014550131
4D TRAJECTORY DATA PROFILES
Tactical flight Models
bull FTFM - Filed Tactical Flight Model The FTFM is the
ldquoinitialrdquo profile as it reflects the status of the demand before
activation of the regulation plan It is computed with the latest
flight plan version sent by each AO to the CFMUIFPS
bull RTFM - Regulated Tactical Flight Model The RTFM is the
ldquoregulatedrdquo profile as it reflects the status of the demand after
activation of the regulation plan It is computed with the latest
ATFM slot (CTOT) issued to the AO by the ground
regulation system
bull CTFM - Current Tactical Flight Model The CTFM is the
ldquoactualrdquo profile as it integrates the actual entry time of the
flights in the regulated TV It is computed with the Radar
Data sent by ACCs to CFMUETFMS ref
CPG_GEN - Profiles generated by the CFMU path generation
tool
bull SCR - Shortest Constrained Route
bull SRR - Shortest RAD restriction applied Route
bull SUR - Shortest Unconstrained Route
bull DCT - Direct route
CPF - Correlated Position reports for a Flight CPRs
(Correlated Position Reports) which are surveillance data
collected from the ACCs
Filed Flight Plan
CDM
Header
Point Profile
Airspace Profile
Circle Intersection
Profile
RTFM Profile
CTFM Profile
CFP Profile
FTFM Profile
4D TRAJECTORY DATA PROFILES
Current Tactical Flight Model (CTFM) is computed with Radar Data sent by
Area Control Centers to CFMUETFMS so it can be deemed as a fused
version of FTFM with real data
ENHANCED TACTICAL FLOW MANAGEMENT SYSTEM (ETFMS) EUROCONTROL 2013
DATA TYPES
bull Base of Aircraft Data (BADA) depending on ac type
ndash Nominal control variables (BADA 3)
ndash Full flight variable envelope (BADA 4)
bull optimization
Aircraft
Performance
Data
AIRCRAFT EQUATION OF MOTION
bull equation of motion sufficient in 3 dof
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
number of parameters of the system that may vary independently
BASE OF AIRCRAFT DATA (BADA)
bull There are two families of BADA APM based on the same modelling approach and components [EUROCONTROL]
bull BADA Family 3ndash providing a 90 coverage of the current aircraft types operating
in the ECAC airspace
ndash model aircraft behaviour over the normal operations part of the flight envelope and to meet todays requirements for aircraft performance modelling and simulation
bull BADA Family 4 ndash a newly developed model intended to meet advanced functional
and precision requirements of the new ATM systems
ndash providing a 60 coverage of the current aircraft types operating in ECAC airspace
ndash BADA 4 provides accurate modelling of aircraft over the entire flight envelope and enables modelling and simulation of advanced concepts of future systems
AIRCRAFT PERFORMANCE MODEL
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
BADA AIRCRAFT LIMITATION MODEL
DATA TYPES
bull Business objectives
ndash Cost Index
ndash User Preferences Model (UPM)
ndash Ground delays due to connectionshellip
Business Rules
euro
HORIZONTAL OPTIMISATION
TO_WPT FROM_WPT Cost
A
B
C
DEP
DEP
DEP
21
25
23
A
A
E
B
52
40
CG 45
B
B
E
F
49
53
G
G
F
J
73
79
E
E
K
H
84
75
F
F
H
I
70
67
I
I
L
M
96
85
HL 86
JM 119
KO 117
KL 109
MQ 115
LP 118
QDEST 134
OP 136
PDEST 130
Worklist
Dijkstra algorithm
DEPDEST
16
40
19
12
19
J
28
34
I14
17
O33
25
Q30
P32
F24
28
D
E
19
31
G22
A
B
C
2125
23
H
K
35
26 L
M18
29
1) Selection of segments for current from- waypoint
2) Calculation of costs for selected segments
3) Entering calculated datasets into worklist
4) Selection of best dataset from worklist
5) To- waypoint of best dataset becomes from- waypoint
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
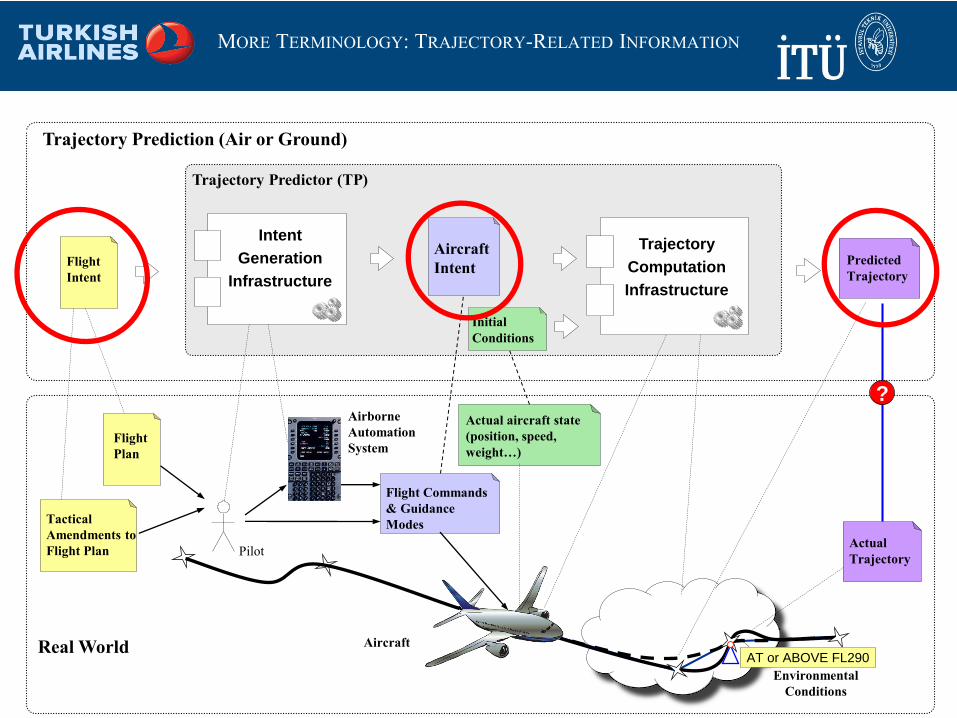
Actual aircraft state
(position speed
weighthellip)
MORE TERMINOLOGY TRAJECTORY-RELATED INFORMATION
Environmental
Conditions
Pilot
Real World
Trajectory Prediction (Air or Ground)
Flight Commands
amp Guidance
Modes
Flight
Intent
Flight
Plan
Tactical
Amendments to
Flight Plan
Airborne
Automation
System
Actual
Trajectory
Aircraft
Predicted
Trajectory
Trajectory
Computation
Infrastructure
Aircraft
Intent
Intent
Generation
Infrastructure
Initial
Conditions
Trajectory Predictor (TP)
AT or ABOVE FL290
SHARING TRAJECTORY-RELATED INFORMATION
Data COM InfrastructurePredicted trajectory
information
Flight
Intent
Airborne
Predicted
Trajectory
TP PROCESS 2 (eg arrival manager)
Flight
Intent
Ground
Predicted
Trajectory
Trajectory
Computation
Infrastructure
(1)
Aircraft
Intent
Intent
Generation
Infrastructure
(1)
Airborne TP
Trajectory
Computation
Infrastructure
(2)
Aircraft
Intent
Intent
Generation
Infrastructure
(2)
Ground TP
Aircraft Intent
information
Flight Intent
Information
Trajectory Prediction (eg flight management system)
bull Two levels in the language grammar lexical and syntactical
bull Lexical Level Instructions
ndash Instructions are atomic inputs to the Trajectory Engine that capture basic
commands and guidance modes at the disposal of the pilotFMS to direct the
operation of the aircraft
bull Syntactical level Operations
ndash Operations are sets of compatible instructions that when simultaneously active
univocally determine the ensuing aircraft motion
bull With a reduced set of instructions (AIDL alphabet) any possible aircraft
operation can be formally specified in such a way that the ensuing aircraft
motion is unambiguously determined
SHARING TRAJECTORY-RELATED INFORMATION
11
Next generation
FMS
AOC 2
ATFM DST
FMS
AOC 1
FDPS
AMAN DST
Next
Generation
FDPS
Air-Air
Air-Ground
Ground-Ground
SHARING TRAJECTORY-RELATED INFORMATION
12
TRAJECTORY RELATED INFORMATION
AIRCRAFT INTENT
TP2
TPI
TPP
TPR
TPK
TP5
TPL
TPH
Translator
I-5
Translator
R-5
Translator
2-K
Translator
R-2
Translator
2-5
Translator
I-2
Translator
H-5
Translator
R-P
N (N-1) divide 2TRANSLATORS
Translator
K-P
Translator
5-K
Translator
I-R
Translator
5-P
Translator
L-5
Translator
I-H
Translator
H-L
Translator
R-K
Translator
L-P
SHARING TRAJECTORY-RELATED INFORMATION
13
TP2
TPI
TPP
TPR
TPK
TP5
TPL
TPH
Translator
L-AIDL
AIDL
Translator
5-AIDL
Translator
P-AIDL
Translator
K-AIDL
Translator
R-AIDL
Translator
2-AIDL
Translator
H-AIDL
Translator
I-AIDL
N TRANSLATORS
SHARING TRAJECTORY-RELATED INFORMATION
externalinternal
Constraints amp
Rules
Aeronautical
Nav Data
Weather
Data
Basic Flight
Data amp
Schedule
Route Type amp
Optimization
Settings
Aircraft
Performance
Data
Business Rules
euroFlight
Number
City Pair
Alternate
ADES
DOF STD
Fuel Policy AC Type
AC
Equipment
AC
Envelope
Payload
Payload -
Range
Wind
Condition
Air Pressure
Air Temp
Natural
Hazards
Stat Dyn
Routes
Fix Free
Route
Opt Criteria
Cost Index
Traffic
Rights
RNAV Rules
NOTAM
TFR
(eg RAD)
Terrain
Clearance
Terminal
Procedures
DCT
Connection
Airport
Definition
Flight
connectivity
Human Req
Time Costs
Business
Targets
Business
Constraints
Conditional
Routes
DATA TYPES
bull METARTAF
LTBA 312020Z 05006KT 030V100 CAVOK 1908 Q1018 NOSIG
TAF LTBA 311640Z 31180124 03009KT CAVOK
BECMG 01030106 SCT035
TEMPO 01080112 04015G25KT
BECMG 01140116 CAVOK
Weather
Data
METAR EXPLAINED
KTTN 051853Z 04011KT 12SM VCTS SN FZFG BKN003 OVC010 M02M02 A3006 RMK AO2 TSB40
SLP176 P0002 T10171017
bull KTTN is the ICAO identifier for the Trenton-Mercer Airport
bull 051853Z indicates the day of the month is the 5th and the time of day is 1853 ZuluUTC 653PM GMT
or 153PM Eastern Standard Time
bull 04011KT indicates the wind is from 040deg true (north east) at 11 knots (20 kmh 13 mph) In the United
States the wind direction must have a 60deg or greater variance for variable wind direction to be reported
and the wind speed must be greater than 3 knots (56 kmh 35 mph)
bull 12SM indicates the prevailing visibility is 1frasl2 mi (800 m) SM = statute mile
bull VCTS indicates a thunderstorm (TS) in the vicinity (VC) which means from 5ndash10 mi (8ndash16 km)
bull SN indicates snow is falling at a moderate intensity a preceding plus or minus sign (+-) indicates heavy
or light precipitation Without a +- sign moderate precipitation is assumed
bull FZFG indicates the presence of freezing fog
bull BKN003 OVC010 indicates a broken (58 to 78 of the sky covered) cloud layer at 300 ft (91 m) above
ground level (AGL) and an overcast (88 of the sky covered) layer at 1000 ft (300 m)
bull M02M02 indicates the temperature is minus2degC (28degF) and the dewpoint is minus2degC (28degF) An M in
front of the number indicates that the temperaturedew point is minus ie below zero (0) Celsius
bull A3006 indicates the altimeter setting is 3006 inHg (1018 hPa)
bull RMK indicates the remarks section follows
DATA TYPES
bull Aeronautical Information Manual (AIM)
ndash SID and STAR Taxi charts
Aeronautical
Nav Data
SID
STAR
DATA TYPES
bull Airspace rules
ndash Eg seperation
Constraints amp
Rules
DATA TYPES
bull Cost Index
bull Airline (User) preferred routes
ndash User Preferences Model (UPM)
Route Type amp
Optimization
Settings
COST DEFINITION
COST INDEX EXAMPLE
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
INPUTS
bull Initial conditions (IC)
bull Flight Intent (FI)
bull User Preferences Model (UPM)
ndash ie airline policy
bull Operational Context Model (OCM)
ndash rules of airpace including
STARs and SIDs
bull ie ATFM policy
ndash Aircraft Performance Model
(APM)
bull Based on BADA
ndash Weather Model (WM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Flight Intent with User Preferences Model (UPM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull FI with UPM and Operational Context Model (OCM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory with details
DATA TYPES
bull Flight Plan
bull Regulated Flight Plan
bull Actual Flight data (Current Tactical)
bull Correlated Position data
bull CDM related data
Basic Flight
Data amp
Schedule
4D TRAJECTORY DATA PROFILES
LIPEEDFMJMP803JMPD22820110301031200BB9377945220110301031500FPLFPLAFPNEXENEXENNN2011030103150020110301031500TEFINS783849NNN00ACHN
NNN600300N00N0NDCULTNRSNNK00344154791F160N0234019032500LIPELUPOS5N10A443151N0111749EY
032955DCT7518V443121N0110416E32Y 033515DCT15038V443048N0104912E67Y 033640DCT16043V443040N0104526E75Y
033830LUPOSL99516057W443017N0103453EY 034355PARL99516099N444920N0101736EY 034735MISPOL995160127W450126N0100450EY
035305BEKANL995160169W451930N0094540EY 035720TZOL995160202N453333N0093026EY 040450PEPAGN851160260W455902N0090417EY
040730ABESIN851160280W460935N0090234EY 041350PIXOSN851160329W463619N0085859EY 041800SOPERN851160361W465322N0085640EY
042155ELMURN851160391W470924N0085427EY 042350ROLSAN851160406W471723N0085321EY 042705KUDESDCT160431W473115N0085126EN
044840DCT160597V490001N0083550E76N 045435DCT75623V491355N0083323E88N
050205EDFM3650A492821N0083051EN23032500LI040545NAS443151N0111749E460244N0090341E11600267
032500LIMMFIR040545FIR443151N0111749E460244N0090341E11600267 032500LIPECR033115ES443151N0111749E443113N0110030E194023
032500LIPECTR033115AUA443151N0111749E443113N0110030E194023 033115LIPPADS033735ES443113N0110030E443029N0104009E941602350
033115LIPPC1X033735ES443113N0110030E443029N0104009E941602350 033115LIPPCTA033735AUA443113N0110030E443029N0104009E941602350
033735LIMMECTA034805AUA443029N0104009E450310N0100300E16016050131 033735LIMMES1034805ES443029N0104009E450310N0100300E16016050131
033735LIMMES1X034805ES443029N0104009E450310N0100300E16016050131 034635LIMMR60041420ES445759N0100829E463827N0085842E160160119333
034805LIMMACTA040730AUA450310N0100300E460935N0090234E160160131280 034805LIMMADE035640ES450310N0100300E453126N0093244E160160131197
035640LIMMANE040730ES453126N0093244E460935N0090234E160160197280 040545LS042705NAS460244N0090341E473115N0085126E160160267431
040545LSASFIR042705FIR460244N0090341E473115N0085126E160160267431 040730LSAZCTA042705AUA460935N0090234E473115N0085126E160160280431
040730LSAZSSL042420ES460935N0090234E471936N0085303E160160280410 041545LSTSA50P042020CRSA464419N0085754E470300N0085520E160160344379
041545LSTSA52P041620ERSA464419N0085754E464627N0085736E160160344348 041620LSTSA51P042020ERSA464627N0085736E470300N0085520E160160348379
042020LSTSA40P042115ERSA470300N0085520E470644N0085449E160160379386
042420LSAZESL042705ES471936N0085303E473115N0085126E1601604104310344157065F160N02340 F140N023493 F160N023498 F150N0234390
F100N023439778032200LIPELUPOS5N10A443151N0111749EY 032540DCT6014V443128N0110716E25Y 032730DCT6022V443115N0110115E39Y
032800DCT6824V443111N0105944E42Y 032830DCT7027V443106N0105729E47Y 032845DCT7528V443105N0105644E49Y 032855DCT7829V443103N0105558E51Y
032910DCT8030V443102N0105513E53Y 032925DCT8032V443058N0105343E56Y 032955DCT8834V443055N0105212E60Y 033035DCT10037V443050N0104957E65Y
033040DCT10038V443048N0104912E67Y 033050DCT10439V443047N0104826E68Y 033110DCT10640V443045N0104741E70Y 033150DCT10644V443038N0104441E77Y
033155DCT11045V443037N0104355E79Y 033215LUPOSL99511057W443017N0103453EY 033240DCT11071V443638N0102907E33Y
033245DCT11472V443705N0102843E36Y 033310DCT12074V443800N0102753E40Y 033335DCT12078V443948N0102615E50Y 033345DCT12479V444016N0102550E52Y
033410DCT12880V444043N0102525E55Y 033445DCT12883V444205N0102411E62Y 033500DCT13084V444232N0102346E64Y 033515DCT13087V444353N0102232E71Y
033540DCT13789V444448N0102143E76Y 033600DCT14090V444515N0102118E79Y 033620DCT14092V444609N0102029E83Y 033640DCT14493V444637N0102004E86Y
033700DCT14094V444704N0101939E88Y 033740DCT14098V444853N0101801E98Y 033755PARL99514499N444920N0101736EY
034015DCT144120V445825N0100802E75Y 034110MISPOL995145127W450126N0100450EY 034200DCT145134V450427N0100138E17Y
034215DCT150135V450452N0100111E19Y 034250DCT150140V450702N0095854E31Y 034325DCT154142V450753N0095759E36Y
034405DCT160145V450911N0095637E43Y 034425DCT160148V451028N0095515E50Y 034520DCT160155V451329N0095203E67Y
034625DCT160162V451629N0094852E83Y 034720BEKANL995160169W451930N0094540EY 035145TZOL995160202N453333N0093026EY
035700DCT160242V455107N0091224E69Y 035925PEPAGN851160260W455902N0090417EY 040205ABESIN851160280W460935N0090234EY
040715DCT160319V463052N0085943E80Y 040840PIXOSN851160329W463619N0085859EY 041315SOPERN851160361W465322N0085640EY
041720DCT160390V470852N0085431E97Y 041730ELMURN851157391W470924N0085427EY 041755DCT150393V471028N0085418E13Y
041820DCT150397V471236N0085401E40Y 041920DCT150405V471651N0085325E93Y 041935ROLSAN851147406W471723N0085321EY
042000DCT140408V471830N0085312E8Y 042125DCT140419V472436N0085221E52Y 042205DCT140425V472755N0085154E76Y
042225DCT134427V472902N0085144E84Y 042240DCT130428V472935N0085140E88Y 042320KUDESN851121431W473115N0085126EN
042435DCT100437V473343N0085439E21N 042720ROMIRN851100459W474247N0090628EN 042825VEDOKN851100468W474724N0090714EN
042905TINOXDCT100473W475007N0090740EY 044335DCT100571G484048N0084511EY 045005DCT100607V485957N0083916E68Y
045040DCT94609V490101N0083856E72Y 045100DCT94611V490205N0083836E75Y 045140DCT84614V490341N0083807E81Y 045200DCT84616V490445N0083747E85Y
045240DCT74619V490620N0083717E91Y 045345INKAMDCT54624W490900N0083628EY 045655DCT54642V491820N0083258E56Y
045950DCT16656G492536N0083015EY 050110EDFM3661A492821N0083051EY39032200LI040020NAS443151N0111749E460244N0090341E11600267
032200LIMMFIR040020FIR443151N0111749E460244N0090341E11600267 032200LIPECR033020ES443151N0111749E443052N0105042E196036
032200LIPECTR033020AUA443151N0111749E443052N0105042E196036 033020LIPPADS033205ES443052N0105042E443029N0104009E961103650
033020LIPPC1X033205ES443052N0105042E443029N0104009E961103650 033020LIPPCTA033205AUA443052N0105042E443029N0104009E961103650
033205LIMMECTA034140AUA443029N0104009E450310N0100300E11014550131 033205LIMMES1034140ES443029N0104009E450310N0100300E11014550131
4D TRAJECTORY DATA PROFILES
Tactical flight Models
bull FTFM - Filed Tactical Flight Model The FTFM is the
ldquoinitialrdquo profile as it reflects the status of the demand before
activation of the regulation plan It is computed with the latest
flight plan version sent by each AO to the CFMUIFPS
bull RTFM - Regulated Tactical Flight Model The RTFM is the
ldquoregulatedrdquo profile as it reflects the status of the demand after
activation of the regulation plan It is computed with the latest
ATFM slot (CTOT) issued to the AO by the ground
regulation system
bull CTFM - Current Tactical Flight Model The CTFM is the
ldquoactualrdquo profile as it integrates the actual entry time of the
flights in the regulated TV It is computed with the Radar
Data sent by ACCs to CFMUETFMS ref
CPG_GEN - Profiles generated by the CFMU path generation
tool
bull SCR - Shortest Constrained Route
bull SRR - Shortest RAD restriction applied Route
bull SUR - Shortest Unconstrained Route
bull DCT - Direct route
CPF - Correlated Position reports for a Flight CPRs
(Correlated Position Reports) which are surveillance data
collected from the ACCs
Filed Flight Plan
CDM
Header
Point Profile
Airspace Profile
Circle Intersection
Profile
RTFM Profile
CTFM Profile
CFP Profile
FTFM Profile
4D TRAJECTORY DATA PROFILES
Current Tactical Flight Model (CTFM) is computed with Radar Data sent by
Area Control Centers to CFMUETFMS so it can be deemed as a fused
version of FTFM with real data
ENHANCED TACTICAL FLOW MANAGEMENT SYSTEM (ETFMS) EUROCONTROL 2013
DATA TYPES
bull Base of Aircraft Data (BADA) depending on ac type
ndash Nominal control variables (BADA 3)
ndash Full flight variable envelope (BADA 4)
bull optimization
Aircraft
Performance
Data
AIRCRAFT EQUATION OF MOTION
bull equation of motion sufficient in 3 dof
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
number of parameters of the system that may vary independently
BASE OF AIRCRAFT DATA (BADA)
bull There are two families of BADA APM based on the same modelling approach and components [EUROCONTROL]
bull BADA Family 3ndash providing a 90 coverage of the current aircraft types operating
in the ECAC airspace
ndash model aircraft behaviour over the normal operations part of the flight envelope and to meet todays requirements for aircraft performance modelling and simulation
bull BADA Family 4 ndash a newly developed model intended to meet advanced functional
and precision requirements of the new ATM systems
ndash providing a 60 coverage of the current aircraft types operating in ECAC airspace
ndash BADA 4 provides accurate modelling of aircraft over the entire flight envelope and enables modelling and simulation of advanced concepts of future systems
AIRCRAFT PERFORMANCE MODEL
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
BADA AIRCRAFT LIMITATION MODEL
DATA TYPES
bull Business objectives
ndash Cost Index
ndash User Preferences Model (UPM)
ndash Ground delays due to connectionshellip
Business Rules
euro
HORIZONTAL OPTIMISATION
TO_WPT FROM_WPT Cost
A
B
C
DEP
DEP
DEP
21
25
23
A
A
E
B
52
40
CG 45
B
B
E
F
49
53
G
G
F
J
73
79
E
E
K
H
84
75
F
F
H
I
70
67
I
I
L
M
96
85
HL 86
JM 119
KO 117
KL 109
MQ 115
LP 118
QDEST 134
OP 136
PDEST 130
Worklist
Dijkstra algorithm
DEPDEST
16
40
19
12
19
J
28
34
I14
17
O33
25
Q30
P32
F24
28
D
E
19
31
G22
A
B
C
2125
23
H
K
35
26 L
M18
29
1) Selection of segments for current from- waypoint
2) Calculation of costs for selected segments
3) Entering calculated datasets into worklist
4) Selection of best dataset from worklist
5) To- waypoint of best dataset becomes from- waypoint
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
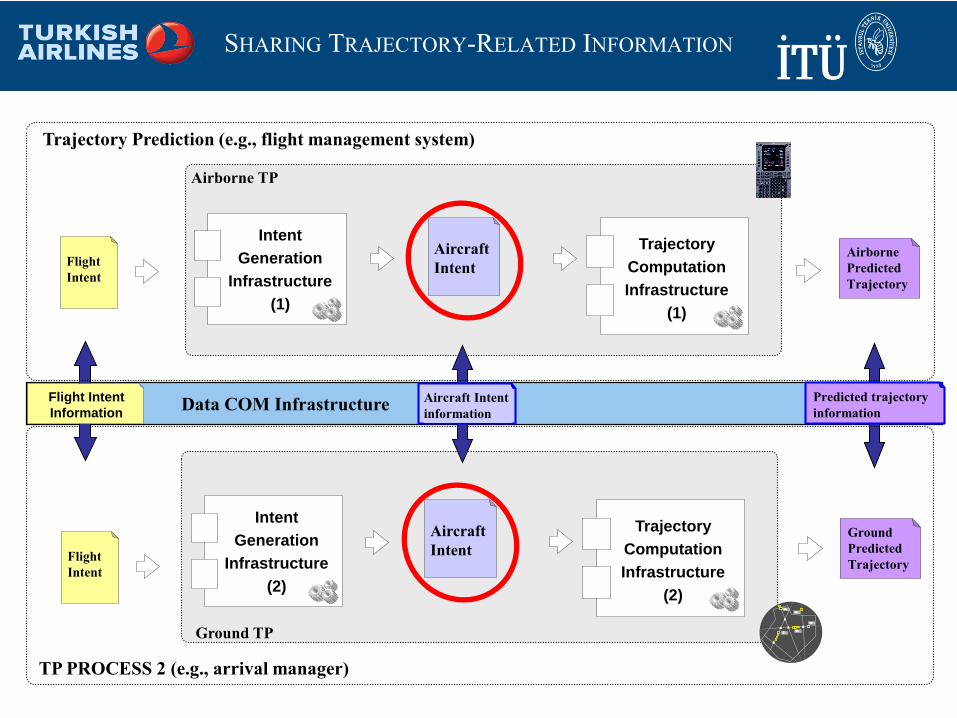
SHARING TRAJECTORY-RELATED INFORMATION
Data COM InfrastructurePredicted trajectory
information
Flight
Intent
Airborne
Predicted
Trajectory
TP PROCESS 2 (eg arrival manager)
Flight
Intent
Ground
Predicted
Trajectory
Trajectory
Computation
Infrastructure
(1)
Aircraft
Intent
Intent
Generation
Infrastructure
(1)
Airborne TP
Trajectory
Computation
Infrastructure
(2)
Aircraft
Intent
Intent
Generation
Infrastructure
(2)
Ground TP
Aircraft Intent
information
Flight Intent
Information
Trajectory Prediction (eg flight management system)
bull Two levels in the language grammar lexical and syntactical
bull Lexical Level Instructions
ndash Instructions are atomic inputs to the Trajectory Engine that capture basic
commands and guidance modes at the disposal of the pilotFMS to direct the
operation of the aircraft
bull Syntactical level Operations
ndash Operations are sets of compatible instructions that when simultaneously active
univocally determine the ensuing aircraft motion
bull With a reduced set of instructions (AIDL alphabet) any possible aircraft
operation can be formally specified in such a way that the ensuing aircraft
motion is unambiguously determined
SHARING TRAJECTORY-RELATED INFORMATION
11
Next generation
FMS
AOC 2
ATFM DST
FMS
AOC 1
FDPS
AMAN DST
Next
Generation
FDPS
Air-Air
Air-Ground
Ground-Ground
SHARING TRAJECTORY-RELATED INFORMATION
12
TRAJECTORY RELATED INFORMATION
AIRCRAFT INTENT
TP2
TPI
TPP
TPR
TPK
TP5
TPL
TPH
Translator
I-5
Translator
R-5
Translator
2-K
Translator
R-2
Translator
2-5
Translator
I-2
Translator
H-5
Translator
R-P
N (N-1) divide 2TRANSLATORS
Translator
K-P
Translator
5-K
Translator
I-R
Translator
5-P
Translator
L-5
Translator
I-H
Translator
H-L
Translator
R-K
Translator
L-P
SHARING TRAJECTORY-RELATED INFORMATION
13
TP2
TPI
TPP
TPR
TPK
TP5
TPL
TPH
Translator
L-AIDL
AIDL
Translator
5-AIDL
Translator
P-AIDL
Translator
K-AIDL
Translator
R-AIDL
Translator
2-AIDL
Translator
H-AIDL
Translator
I-AIDL
N TRANSLATORS
SHARING TRAJECTORY-RELATED INFORMATION
externalinternal
Constraints amp
Rules
Aeronautical
Nav Data
Weather
Data
Basic Flight
Data amp
Schedule
Route Type amp
Optimization
Settings
Aircraft
Performance
Data
Business Rules
euroFlight
Number
City Pair
Alternate
ADES
DOF STD
Fuel Policy AC Type
AC
Equipment
AC
Envelope
Payload
Payload -
Range
Wind
Condition
Air Pressure
Air Temp
Natural
Hazards
Stat Dyn
Routes
Fix Free
Route
Opt Criteria
Cost Index
Traffic
Rights
RNAV Rules
NOTAM
TFR
(eg RAD)
Terrain
Clearance
Terminal
Procedures
DCT
Connection
Airport
Definition
Flight
connectivity
Human Req
Time Costs
Business
Targets
Business
Constraints
Conditional
Routes
DATA TYPES
bull METARTAF
LTBA 312020Z 05006KT 030V100 CAVOK 1908 Q1018 NOSIG
TAF LTBA 311640Z 31180124 03009KT CAVOK
BECMG 01030106 SCT035
TEMPO 01080112 04015G25KT
BECMG 01140116 CAVOK
Weather
Data
METAR EXPLAINED
KTTN 051853Z 04011KT 12SM VCTS SN FZFG BKN003 OVC010 M02M02 A3006 RMK AO2 TSB40
SLP176 P0002 T10171017
bull KTTN is the ICAO identifier for the Trenton-Mercer Airport
bull 051853Z indicates the day of the month is the 5th and the time of day is 1853 ZuluUTC 653PM GMT
or 153PM Eastern Standard Time
bull 04011KT indicates the wind is from 040deg true (north east) at 11 knots (20 kmh 13 mph) In the United
States the wind direction must have a 60deg or greater variance for variable wind direction to be reported
and the wind speed must be greater than 3 knots (56 kmh 35 mph)
bull 12SM indicates the prevailing visibility is 1frasl2 mi (800 m) SM = statute mile
bull VCTS indicates a thunderstorm (TS) in the vicinity (VC) which means from 5ndash10 mi (8ndash16 km)
bull SN indicates snow is falling at a moderate intensity a preceding plus or minus sign (+-) indicates heavy
or light precipitation Without a +- sign moderate precipitation is assumed
bull FZFG indicates the presence of freezing fog
bull BKN003 OVC010 indicates a broken (58 to 78 of the sky covered) cloud layer at 300 ft (91 m) above
ground level (AGL) and an overcast (88 of the sky covered) layer at 1000 ft (300 m)
bull M02M02 indicates the temperature is minus2degC (28degF) and the dewpoint is minus2degC (28degF) An M in
front of the number indicates that the temperaturedew point is minus ie below zero (0) Celsius
bull A3006 indicates the altimeter setting is 3006 inHg (1018 hPa)
bull RMK indicates the remarks section follows
DATA TYPES
bull Aeronautical Information Manual (AIM)
ndash SID and STAR Taxi charts
Aeronautical
Nav Data
SID
STAR
DATA TYPES
bull Airspace rules
ndash Eg seperation
Constraints amp
Rules
DATA TYPES
bull Cost Index
bull Airline (User) preferred routes
ndash User Preferences Model (UPM)
Route Type amp
Optimization
Settings
COST DEFINITION
COST INDEX EXAMPLE
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
INPUTS
bull Initial conditions (IC)
bull Flight Intent (FI)
bull User Preferences Model (UPM)
ndash ie airline policy
bull Operational Context Model (OCM)
ndash rules of airpace including
STARs and SIDs
bull ie ATFM policy
ndash Aircraft Performance Model
(APM)
bull Based on BADA
ndash Weather Model (WM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Flight Intent with User Preferences Model (UPM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull FI with UPM and Operational Context Model (OCM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory with details
DATA TYPES
bull Flight Plan
bull Regulated Flight Plan
bull Actual Flight data (Current Tactical)
bull Correlated Position data
bull CDM related data
Basic Flight
Data amp
Schedule
4D TRAJECTORY DATA PROFILES
LIPEEDFMJMP803JMPD22820110301031200BB9377945220110301031500FPLFPLAFPNEXENEXENNN2011030103150020110301031500TEFINS783849NNN00ACHN
NNN600300N00N0NDCULTNRSNNK00344154791F160N0234019032500LIPELUPOS5N10A443151N0111749EY
032955DCT7518V443121N0110416E32Y 033515DCT15038V443048N0104912E67Y 033640DCT16043V443040N0104526E75Y
033830LUPOSL99516057W443017N0103453EY 034355PARL99516099N444920N0101736EY 034735MISPOL995160127W450126N0100450EY
035305BEKANL995160169W451930N0094540EY 035720TZOL995160202N453333N0093026EY 040450PEPAGN851160260W455902N0090417EY
040730ABESIN851160280W460935N0090234EY 041350PIXOSN851160329W463619N0085859EY 041800SOPERN851160361W465322N0085640EY
042155ELMURN851160391W470924N0085427EY 042350ROLSAN851160406W471723N0085321EY 042705KUDESDCT160431W473115N0085126EN
044840DCT160597V490001N0083550E76N 045435DCT75623V491355N0083323E88N
050205EDFM3650A492821N0083051EN23032500LI040545NAS443151N0111749E460244N0090341E11600267
032500LIMMFIR040545FIR443151N0111749E460244N0090341E11600267 032500LIPECR033115ES443151N0111749E443113N0110030E194023
032500LIPECTR033115AUA443151N0111749E443113N0110030E194023 033115LIPPADS033735ES443113N0110030E443029N0104009E941602350
033115LIPPC1X033735ES443113N0110030E443029N0104009E941602350 033115LIPPCTA033735AUA443113N0110030E443029N0104009E941602350
033735LIMMECTA034805AUA443029N0104009E450310N0100300E16016050131 033735LIMMES1034805ES443029N0104009E450310N0100300E16016050131
033735LIMMES1X034805ES443029N0104009E450310N0100300E16016050131 034635LIMMR60041420ES445759N0100829E463827N0085842E160160119333
034805LIMMACTA040730AUA450310N0100300E460935N0090234E160160131280 034805LIMMADE035640ES450310N0100300E453126N0093244E160160131197
035640LIMMANE040730ES453126N0093244E460935N0090234E160160197280 040545LS042705NAS460244N0090341E473115N0085126E160160267431
040545LSASFIR042705FIR460244N0090341E473115N0085126E160160267431 040730LSAZCTA042705AUA460935N0090234E473115N0085126E160160280431
040730LSAZSSL042420ES460935N0090234E471936N0085303E160160280410 041545LSTSA50P042020CRSA464419N0085754E470300N0085520E160160344379
041545LSTSA52P041620ERSA464419N0085754E464627N0085736E160160344348 041620LSTSA51P042020ERSA464627N0085736E470300N0085520E160160348379
042020LSTSA40P042115ERSA470300N0085520E470644N0085449E160160379386
042420LSAZESL042705ES471936N0085303E473115N0085126E1601604104310344157065F160N02340 F140N023493 F160N023498 F150N0234390
F100N023439778032200LIPELUPOS5N10A443151N0111749EY 032540DCT6014V443128N0110716E25Y 032730DCT6022V443115N0110115E39Y
032800DCT6824V443111N0105944E42Y 032830DCT7027V443106N0105729E47Y 032845DCT7528V443105N0105644E49Y 032855DCT7829V443103N0105558E51Y
032910DCT8030V443102N0105513E53Y 032925DCT8032V443058N0105343E56Y 032955DCT8834V443055N0105212E60Y 033035DCT10037V443050N0104957E65Y
033040DCT10038V443048N0104912E67Y 033050DCT10439V443047N0104826E68Y 033110DCT10640V443045N0104741E70Y 033150DCT10644V443038N0104441E77Y
033155DCT11045V443037N0104355E79Y 033215LUPOSL99511057W443017N0103453EY 033240DCT11071V443638N0102907E33Y
033245DCT11472V443705N0102843E36Y 033310DCT12074V443800N0102753E40Y 033335DCT12078V443948N0102615E50Y 033345DCT12479V444016N0102550E52Y
033410DCT12880V444043N0102525E55Y 033445DCT12883V444205N0102411E62Y 033500DCT13084V444232N0102346E64Y 033515DCT13087V444353N0102232E71Y
033540DCT13789V444448N0102143E76Y 033600DCT14090V444515N0102118E79Y 033620DCT14092V444609N0102029E83Y 033640DCT14493V444637N0102004E86Y
033700DCT14094V444704N0101939E88Y 033740DCT14098V444853N0101801E98Y 033755PARL99514499N444920N0101736EY
034015DCT144120V445825N0100802E75Y 034110MISPOL995145127W450126N0100450EY 034200DCT145134V450427N0100138E17Y
034215DCT150135V450452N0100111E19Y 034250DCT150140V450702N0095854E31Y 034325DCT154142V450753N0095759E36Y
034405DCT160145V450911N0095637E43Y 034425DCT160148V451028N0095515E50Y 034520DCT160155V451329N0095203E67Y
034625DCT160162V451629N0094852E83Y 034720BEKANL995160169W451930N0094540EY 035145TZOL995160202N453333N0093026EY
035700DCT160242V455107N0091224E69Y 035925PEPAGN851160260W455902N0090417EY 040205ABESIN851160280W460935N0090234EY
040715DCT160319V463052N0085943E80Y 040840PIXOSN851160329W463619N0085859EY 041315SOPERN851160361W465322N0085640EY
041720DCT160390V470852N0085431E97Y 041730ELMURN851157391W470924N0085427EY 041755DCT150393V471028N0085418E13Y
041820DCT150397V471236N0085401E40Y 041920DCT150405V471651N0085325E93Y 041935ROLSAN851147406W471723N0085321EY
042000DCT140408V471830N0085312E8Y 042125DCT140419V472436N0085221E52Y 042205DCT140425V472755N0085154E76Y
042225DCT134427V472902N0085144E84Y 042240DCT130428V472935N0085140E88Y 042320KUDESN851121431W473115N0085126EN
042435DCT100437V473343N0085439E21N 042720ROMIRN851100459W474247N0090628EN 042825VEDOKN851100468W474724N0090714EN
042905TINOXDCT100473W475007N0090740EY 044335DCT100571G484048N0084511EY 045005DCT100607V485957N0083916E68Y
045040DCT94609V490101N0083856E72Y 045100DCT94611V490205N0083836E75Y 045140DCT84614V490341N0083807E81Y 045200DCT84616V490445N0083747E85Y
045240DCT74619V490620N0083717E91Y 045345INKAMDCT54624W490900N0083628EY 045655DCT54642V491820N0083258E56Y
045950DCT16656G492536N0083015EY 050110EDFM3661A492821N0083051EY39032200LI040020NAS443151N0111749E460244N0090341E11600267
032200LIMMFIR040020FIR443151N0111749E460244N0090341E11600267 032200LIPECR033020ES443151N0111749E443052N0105042E196036
032200LIPECTR033020AUA443151N0111749E443052N0105042E196036 033020LIPPADS033205ES443052N0105042E443029N0104009E961103650
033020LIPPC1X033205ES443052N0105042E443029N0104009E961103650 033020LIPPCTA033205AUA443052N0105042E443029N0104009E961103650
033205LIMMECTA034140AUA443029N0104009E450310N0100300E11014550131 033205LIMMES1034140ES443029N0104009E450310N0100300E11014550131
4D TRAJECTORY DATA PROFILES
Tactical flight Models
bull FTFM - Filed Tactical Flight Model The FTFM is the
ldquoinitialrdquo profile as it reflects the status of the demand before
activation of the regulation plan It is computed with the latest
flight plan version sent by each AO to the CFMUIFPS
bull RTFM - Regulated Tactical Flight Model The RTFM is the
ldquoregulatedrdquo profile as it reflects the status of the demand after
activation of the regulation plan It is computed with the latest
ATFM slot (CTOT) issued to the AO by the ground
regulation system
bull CTFM - Current Tactical Flight Model The CTFM is the
ldquoactualrdquo profile as it integrates the actual entry time of the
flights in the regulated TV It is computed with the Radar
Data sent by ACCs to CFMUETFMS ref
CPG_GEN - Profiles generated by the CFMU path generation
tool
bull SCR - Shortest Constrained Route
bull SRR - Shortest RAD restriction applied Route
bull SUR - Shortest Unconstrained Route
bull DCT - Direct route
CPF - Correlated Position reports for a Flight CPRs
(Correlated Position Reports) which are surveillance data
collected from the ACCs
Filed Flight Plan
CDM
Header
Point Profile
Airspace Profile
Circle Intersection
Profile
RTFM Profile
CTFM Profile
CFP Profile
FTFM Profile
4D TRAJECTORY DATA PROFILES
Current Tactical Flight Model (CTFM) is computed with Radar Data sent by
Area Control Centers to CFMUETFMS so it can be deemed as a fused
version of FTFM with real data
ENHANCED TACTICAL FLOW MANAGEMENT SYSTEM (ETFMS) EUROCONTROL 2013
DATA TYPES
bull Base of Aircraft Data (BADA) depending on ac type
ndash Nominal control variables (BADA 3)
ndash Full flight variable envelope (BADA 4)
bull optimization
Aircraft
Performance
Data
AIRCRAFT EQUATION OF MOTION
bull equation of motion sufficient in 3 dof
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
number of parameters of the system that may vary independently
BASE OF AIRCRAFT DATA (BADA)
bull There are two families of BADA APM based on the same modelling approach and components [EUROCONTROL]
bull BADA Family 3ndash providing a 90 coverage of the current aircraft types operating
in the ECAC airspace
ndash model aircraft behaviour over the normal operations part of the flight envelope and to meet todays requirements for aircraft performance modelling and simulation
bull BADA Family 4 ndash a newly developed model intended to meet advanced functional
and precision requirements of the new ATM systems
ndash providing a 60 coverage of the current aircraft types operating in ECAC airspace
ndash BADA 4 provides accurate modelling of aircraft over the entire flight envelope and enables modelling and simulation of advanced concepts of future systems
AIRCRAFT PERFORMANCE MODEL
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
BADA AIRCRAFT LIMITATION MODEL
DATA TYPES
bull Business objectives
ndash Cost Index
ndash User Preferences Model (UPM)
ndash Ground delays due to connectionshellip
Business Rules
euro
HORIZONTAL OPTIMISATION
TO_WPT FROM_WPT Cost
A
B
C
DEP
DEP
DEP
21
25
23
A
A
E
B
52
40
CG 45
B
B
E
F
49
53
G
G
F
J
73
79
E
E
K
H
84
75
F
F
H
I
70
67
I
I
L
M
96
85
HL 86
JM 119
KO 117
KL 109
MQ 115
LP 118
QDEST 134
OP 136
PDEST 130
Worklist
Dijkstra algorithm
DEPDEST
16
40
19
12
19
J
28
34
I14
17
O33
25
Q30
P32
F24
28
D
E
19
31
G22
A
B
C
2125
23
H
K
35
26 L
M18
29
1) Selection of segments for current from- waypoint
2) Calculation of costs for selected segments
3) Entering calculated datasets into worklist
4) Selection of best dataset from worklist
5) To- waypoint of best dataset becomes from- waypoint
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
bull Two levels in the language grammar lexical and syntactical
bull Lexical Level Instructions
ndash Instructions are atomic inputs to the Trajectory Engine that capture basic
commands and guidance modes at the disposal of the pilotFMS to direct the
operation of the aircraft
bull Syntactical level Operations
ndash Operations are sets of compatible instructions that when simultaneously active
univocally determine the ensuing aircraft motion
bull With a reduced set of instructions (AIDL alphabet) any possible aircraft
operation can be formally specified in such a way that the ensuing aircraft
motion is unambiguously determined
SHARING TRAJECTORY-RELATED INFORMATION
11
Next generation
FMS
AOC 2
ATFM DST
FMS
AOC 1
FDPS
AMAN DST
Next
Generation
FDPS
Air-Air
Air-Ground
Ground-Ground
SHARING TRAJECTORY-RELATED INFORMATION
12
TRAJECTORY RELATED INFORMATION
AIRCRAFT INTENT
TP2
TPI
TPP
TPR
TPK
TP5
TPL
TPH
Translator
I-5
Translator
R-5
Translator
2-K
Translator
R-2
Translator
2-5
Translator
I-2
Translator
H-5
Translator
R-P
N (N-1) divide 2TRANSLATORS
Translator
K-P
Translator
5-K
Translator
I-R
Translator
5-P
Translator
L-5
Translator
I-H
Translator
H-L
Translator
R-K
Translator
L-P
SHARING TRAJECTORY-RELATED INFORMATION
13
TP2
TPI
TPP
TPR
TPK
TP5
TPL
TPH
Translator
L-AIDL
AIDL
Translator
5-AIDL
Translator
P-AIDL
Translator
K-AIDL
Translator
R-AIDL
Translator
2-AIDL
Translator
H-AIDL
Translator
I-AIDL
N TRANSLATORS
SHARING TRAJECTORY-RELATED INFORMATION
externalinternal
Constraints amp
Rules
Aeronautical
Nav Data
Weather
Data
Basic Flight
Data amp
Schedule
Route Type amp
Optimization
Settings
Aircraft
Performance
Data
Business Rules
euroFlight
Number
City Pair
Alternate
ADES
DOF STD
Fuel Policy AC Type
AC
Equipment
AC
Envelope
Payload
Payload -
Range
Wind
Condition
Air Pressure
Air Temp
Natural
Hazards
Stat Dyn
Routes
Fix Free
Route
Opt Criteria
Cost Index
Traffic
Rights
RNAV Rules
NOTAM
TFR
(eg RAD)
Terrain
Clearance
Terminal
Procedures
DCT
Connection
Airport
Definition
Flight
connectivity
Human Req
Time Costs
Business
Targets
Business
Constraints
Conditional
Routes
DATA TYPES
bull METARTAF
LTBA 312020Z 05006KT 030V100 CAVOK 1908 Q1018 NOSIG
TAF LTBA 311640Z 31180124 03009KT CAVOK
BECMG 01030106 SCT035
TEMPO 01080112 04015G25KT
BECMG 01140116 CAVOK
Weather
Data
METAR EXPLAINED
KTTN 051853Z 04011KT 12SM VCTS SN FZFG BKN003 OVC010 M02M02 A3006 RMK AO2 TSB40
SLP176 P0002 T10171017
bull KTTN is the ICAO identifier for the Trenton-Mercer Airport
bull 051853Z indicates the day of the month is the 5th and the time of day is 1853 ZuluUTC 653PM GMT
or 153PM Eastern Standard Time
bull 04011KT indicates the wind is from 040deg true (north east) at 11 knots (20 kmh 13 mph) In the United
States the wind direction must have a 60deg or greater variance for variable wind direction to be reported
and the wind speed must be greater than 3 knots (56 kmh 35 mph)
bull 12SM indicates the prevailing visibility is 1frasl2 mi (800 m) SM = statute mile
bull VCTS indicates a thunderstorm (TS) in the vicinity (VC) which means from 5ndash10 mi (8ndash16 km)
bull SN indicates snow is falling at a moderate intensity a preceding plus or minus sign (+-) indicates heavy
or light precipitation Without a +- sign moderate precipitation is assumed
bull FZFG indicates the presence of freezing fog
bull BKN003 OVC010 indicates a broken (58 to 78 of the sky covered) cloud layer at 300 ft (91 m) above
ground level (AGL) and an overcast (88 of the sky covered) layer at 1000 ft (300 m)
bull M02M02 indicates the temperature is minus2degC (28degF) and the dewpoint is minus2degC (28degF) An M in
front of the number indicates that the temperaturedew point is minus ie below zero (0) Celsius
bull A3006 indicates the altimeter setting is 3006 inHg (1018 hPa)
bull RMK indicates the remarks section follows
DATA TYPES
bull Aeronautical Information Manual (AIM)
ndash SID and STAR Taxi charts
Aeronautical
Nav Data
SID
STAR
DATA TYPES
bull Airspace rules
ndash Eg seperation
Constraints amp
Rules
DATA TYPES
bull Cost Index
bull Airline (User) preferred routes
ndash User Preferences Model (UPM)
Route Type amp
Optimization
Settings
COST DEFINITION
COST INDEX EXAMPLE
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
INPUTS
bull Initial conditions (IC)
bull Flight Intent (FI)
bull User Preferences Model (UPM)
ndash ie airline policy
bull Operational Context Model (OCM)
ndash rules of airpace including
STARs and SIDs
bull ie ATFM policy
ndash Aircraft Performance Model
(APM)
bull Based on BADA
ndash Weather Model (WM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Flight Intent with User Preferences Model (UPM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull FI with UPM and Operational Context Model (OCM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory with details
DATA TYPES
bull Flight Plan
bull Regulated Flight Plan
bull Actual Flight data (Current Tactical)
bull Correlated Position data
bull CDM related data
Basic Flight
Data amp
Schedule
4D TRAJECTORY DATA PROFILES
LIPEEDFMJMP803JMPD22820110301031200BB9377945220110301031500FPLFPLAFPNEXENEXENNN2011030103150020110301031500TEFINS783849NNN00ACHN
NNN600300N00N0NDCULTNRSNNK00344154791F160N0234019032500LIPELUPOS5N10A443151N0111749EY
032955DCT7518V443121N0110416E32Y 033515DCT15038V443048N0104912E67Y 033640DCT16043V443040N0104526E75Y
033830LUPOSL99516057W443017N0103453EY 034355PARL99516099N444920N0101736EY 034735MISPOL995160127W450126N0100450EY
035305BEKANL995160169W451930N0094540EY 035720TZOL995160202N453333N0093026EY 040450PEPAGN851160260W455902N0090417EY
040730ABESIN851160280W460935N0090234EY 041350PIXOSN851160329W463619N0085859EY 041800SOPERN851160361W465322N0085640EY
042155ELMURN851160391W470924N0085427EY 042350ROLSAN851160406W471723N0085321EY 042705KUDESDCT160431W473115N0085126EN
044840DCT160597V490001N0083550E76N 045435DCT75623V491355N0083323E88N
050205EDFM3650A492821N0083051EN23032500LI040545NAS443151N0111749E460244N0090341E11600267
032500LIMMFIR040545FIR443151N0111749E460244N0090341E11600267 032500LIPECR033115ES443151N0111749E443113N0110030E194023
032500LIPECTR033115AUA443151N0111749E443113N0110030E194023 033115LIPPADS033735ES443113N0110030E443029N0104009E941602350
033115LIPPC1X033735ES443113N0110030E443029N0104009E941602350 033115LIPPCTA033735AUA443113N0110030E443029N0104009E941602350
033735LIMMECTA034805AUA443029N0104009E450310N0100300E16016050131 033735LIMMES1034805ES443029N0104009E450310N0100300E16016050131
033735LIMMES1X034805ES443029N0104009E450310N0100300E16016050131 034635LIMMR60041420ES445759N0100829E463827N0085842E160160119333
034805LIMMACTA040730AUA450310N0100300E460935N0090234E160160131280 034805LIMMADE035640ES450310N0100300E453126N0093244E160160131197
035640LIMMANE040730ES453126N0093244E460935N0090234E160160197280 040545LS042705NAS460244N0090341E473115N0085126E160160267431
040545LSASFIR042705FIR460244N0090341E473115N0085126E160160267431 040730LSAZCTA042705AUA460935N0090234E473115N0085126E160160280431
040730LSAZSSL042420ES460935N0090234E471936N0085303E160160280410 041545LSTSA50P042020CRSA464419N0085754E470300N0085520E160160344379
041545LSTSA52P041620ERSA464419N0085754E464627N0085736E160160344348 041620LSTSA51P042020ERSA464627N0085736E470300N0085520E160160348379
042020LSTSA40P042115ERSA470300N0085520E470644N0085449E160160379386
042420LSAZESL042705ES471936N0085303E473115N0085126E1601604104310344157065F160N02340 F140N023493 F160N023498 F150N0234390
F100N023439778032200LIPELUPOS5N10A443151N0111749EY 032540DCT6014V443128N0110716E25Y 032730DCT6022V443115N0110115E39Y
032800DCT6824V443111N0105944E42Y 032830DCT7027V443106N0105729E47Y 032845DCT7528V443105N0105644E49Y 032855DCT7829V443103N0105558E51Y
032910DCT8030V443102N0105513E53Y 032925DCT8032V443058N0105343E56Y 032955DCT8834V443055N0105212E60Y 033035DCT10037V443050N0104957E65Y
033040DCT10038V443048N0104912E67Y 033050DCT10439V443047N0104826E68Y 033110DCT10640V443045N0104741E70Y 033150DCT10644V443038N0104441E77Y
033155DCT11045V443037N0104355E79Y 033215LUPOSL99511057W443017N0103453EY 033240DCT11071V443638N0102907E33Y
033245DCT11472V443705N0102843E36Y 033310DCT12074V443800N0102753E40Y 033335DCT12078V443948N0102615E50Y 033345DCT12479V444016N0102550E52Y
033410DCT12880V444043N0102525E55Y 033445DCT12883V444205N0102411E62Y 033500DCT13084V444232N0102346E64Y 033515DCT13087V444353N0102232E71Y
033540DCT13789V444448N0102143E76Y 033600DCT14090V444515N0102118E79Y 033620DCT14092V444609N0102029E83Y 033640DCT14493V444637N0102004E86Y
033700DCT14094V444704N0101939E88Y 033740DCT14098V444853N0101801E98Y 033755PARL99514499N444920N0101736EY
034015DCT144120V445825N0100802E75Y 034110MISPOL995145127W450126N0100450EY 034200DCT145134V450427N0100138E17Y
034215DCT150135V450452N0100111E19Y 034250DCT150140V450702N0095854E31Y 034325DCT154142V450753N0095759E36Y
034405DCT160145V450911N0095637E43Y 034425DCT160148V451028N0095515E50Y 034520DCT160155V451329N0095203E67Y
034625DCT160162V451629N0094852E83Y 034720BEKANL995160169W451930N0094540EY 035145TZOL995160202N453333N0093026EY
035700DCT160242V455107N0091224E69Y 035925PEPAGN851160260W455902N0090417EY 040205ABESIN851160280W460935N0090234EY
040715DCT160319V463052N0085943E80Y 040840PIXOSN851160329W463619N0085859EY 041315SOPERN851160361W465322N0085640EY
041720DCT160390V470852N0085431E97Y 041730ELMURN851157391W470924N0085427EY 041755DCT150393V471028N0085418E13Y
041820DCT150397V471236N0085401E40Y 041920DCT150405V471651N0085325E93Y 041935ROLSAN851147406W471723N0085321EY
042000DCT140408V471830N0085312E8Y 042125DCT140419V472436N0085221E52Y 042205DCT140425V472755N0085154E76Y
042225DCT134427V472902N0085144E84Y 042240DCT130428V472935N0085140E88Y 042320KUDESN851121431W473115N0085126EN
042435DCT100437V473343N0085439E21N 042720ROMIRN851100459W474247N0090628EN 042825VEDOKN851100468W474724N0090714EN
042905TINOXDCT100473W475007N0090740EY 044335DCT100571G484048N0084511EY 045005DCT100607V485957N0083916E68Y
045040DCT94609V490101N0083856E72Y 045100DCT94611V490205N0083836E75Y 045140DCT84614V490341N0083807E81Y 045200DCT84616V490445N0083747E85Y
045240DCT74619V490620N0083717E91Y 045345INKAMDCT54624W490900N0083628EY 045655DCT54642V491820N0083258E56Y
045950DCT16656G492536N0083015EY 050110EDFM3661A492821N0083051EY39032200LI040020NAS443151N0111749E460244N0090341E11600267
032200LIMMFIR040020FIR443151N0111749E460244N0090341E11600267 032200LIPECR033020ES443151N0111749E443052N0105042E196036
032200LIPECTR033020AUA443151N0111749E443052N0105042E196036 033020LIPPADS033205ES443052N0105042E443029N0104009E961103650
033020LIPPC1X033205ES443052N0105042E443029N0104009E961103650 033020LIPPCTA033205AUA443052N0105042E443029N0104009E961103650
033205LIMMECTA034140AUA443029N0104009E450310N0100300E11014550131 033205LIMMES1034140ES443029N0104009E450310N0100300E11014550131
4D TRAJECTORY DATA PROFILES
Tactical flight Models
bull FTFM - Filed Tactical Flight Model The FTFM is the
ldquoinitialrdquo profile as it reflects the status of the demand before
activation of the regulation plan It is computed with the latest
flight plan version sent by each AO to the CFMUIFPS
bull RTFM - Regulated Tactical Flight Model The RTFM is the
ldquoregulatedrdquo profile as it reflects the status of the demand after
activation of the regulation plan It is computed with the latest
ATFM slot (CTOT) issued to the AO by the ground
regulation system
bull CTFM - Current Tactical Flight Model The CTFM is the
ldquoactualrdquo profile as it integrates the actual entry time of the
flights in the regulated TV It is computed with the Radar
Data sent by ACCs to CFMUETFMS ref
CPG_GEN - Profiles generated by the CFMU path generation
tool
bull SCR - Shortest Constrained Route
bull SRR - Shortest RAD restriction applied Route
bull SUR - Shortest Unconstrained Route
bull DCT - Direct route
CPF - Correlated Position reports for a Flight CPRs
(Correlated Position Reports) which are surveillance data
collected from the ACCs
Filed Flight Plan
CDM
Header
Point Profile
Airspace Profile
Circle Intersection
Profile
RTFM Profile
CTFM Profile
CFP Profile
FTFM Profile
4D TRAJECTORY DATA PROFILES
Current Tactical Flight Model (CTFM) is computed with Radar Data sent by
Area Control Centers to CFMUETFMS so it can be deemed as a fused
version of FTFM with real data
ENHANCED TACTICAL FLOW MANAGEMENT SYSTEM (ETFMS) EUROCONTROL 2013
DATA TYPES
bull Base of Aircraft Data (BADA) depending on ac type
ndash Nominal control variables (BADA 3)
ndash Full flight variable envelope (BADA 4)
bull optimization
Aircraft
Performance
Data
AIRCRAFT EQUATION OF MOTION
bull equation of motion sufficient in 3 dof
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
number of parameters of the system that may vary independently
BASE OF AIRCRAFT DATA (BADA)
bull There are two families of BADA APM based on the same modelling approach and components [EUROCONTROL]
bull BADA Family 3ndash providing a 90 coverage of the current aircraft types operating
in the ECAC airspace
ndash model aircraft behaviour over the normal operations part of the flight envelope and to meet todays requirements for aircraft performance modelling and simulation
bull BADA Family 4 ndash a newly developed model intended to meet advanced functional
and precision requirements of the new ATM systems
ndash providing a 60 coverage of the current aircraft types operating in ECAC airspace
ndash BADA 4 provides accurate modelling of aircraft over the entire flight envelope and enables modelling and simulation of advanced concepts of future systems
AIRCRAFT PERFORMANCE MODEL
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
BADA AIRCRAFT LIMITATION MODEL
DATA TYPES
bull Business objectives
ndash Cost Index
ndash User Preferences Model (UPM)
ndash Ground delays due to connectionshellip
Business Rules
euro
HORIZONTAL OPTIMISATION
TO_WPT FROM_WPT Cost
A
B
C
DEP
DEP
DEP
21
25
23
A
A
E
B
52
40
CG 45
B
B
E
F
49
53
G
G
F
J
73
79
E
E
K
H
84
75
F
F
H
I
70
67
I
I
L
M
96
85
HL 86
JM 119
KO 117
KL 109
MQ 115
LP 118
QDEST 134
OP 136
PDEST 130
Worklist
Dijkstra algorithm
DEPDEST
16
40
19
12
19
J
28
34
I14
17
O33
25
Q30
P32
F24
28
D
E
19
31
G22
A
B
C
2125
23
H
K
35
26 L
M18
29
1) Selection of segments for current from- waypoint
2) Calculation of costs for selected segments
3) Entering calculated datasets into worklist
4) Selection of best dataset from worklist
5) To- waypoint of best dataset becomes from- waypoint
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS

11
Next generation
FMS
AOC 2
ATFM DST
FMS
AOC 1
FDPS
AMAN DST
Next
Generation
FDPS
Air-Air
Air-Ground
Ground-Ground
SHARING TRAJECTORY-RELATED INFORMATION
12
TRAJECTORY RELATED INFORMATION
AIRCRAFT INTENT
TP2
TPI
TPP
TPR
TPK
TP5
TPL
TPH
Translator
I-5
Translator
R-5
Translator
2-K
Translator
R-2
Translator
2-5
Translator
I-2
Translator
H-5
Translator
R-P
N (N-1) divide 2TRANSLATORS
Translator
K-P
Translator
5-K
Translator
I-R
Translator
5-P
Translator
L-5
Translator
I-H
Translator
H-L
Translator
R-K
Translator
L-P
SHARING TRAJECTORY-RELATED INFORMATION
13
TP2
TPI
TPP
TPR
TPK
TP5
TPL
TPH
Translator
L-AIDL
AIDL
Translator
5-AIDL
Translator
P-AIDL
Translator
K-AIDL
Translator
R-AIDL
Translator
2-AIDL
Translator
H-AIDL
Translator
I-AIDL
N TRANSLATORS
SHARING TRAJECTORY-RELATED INFORMATION
externalinternal
Constraints amp
Rules
Aeronautical
Nav Data
Weather
Data
Basic Flight
Data amp
Schedule
Route Type amp
Optimization
Settings
Aircraft
Performance
Data
Business Rules
euroFlight
Number
City Pair
Alternate
ADES
DOF STD
Fuel Policy AC Type
AC
Equipment
AC
Envelope
Payload
Payload -
Range
Wind
Condition
Air Pressure
Air Temp
Natural
Hazards
Stat Dyn
Routes
Fix Free
Route
Opt Criteria
Cost Index
Traffic
Rights
RNAV Rules
NOTAM
TFR
(eg RAD)
Terrain
Clearance
Terminal
Procedures
DCT
Connection
Airport
Definition
Flight
connectivity
Human Req
Time Costs
Business
Targets
Business
Constraints
Conditional
Routes
DATA TYPES
bull METARTAF
LTBA 312020Z 05006KT 030V100 CAVOK 1908 Q1018 NOSIG
TAF LTBA 311640Z 31180124 03009KT CAVOK
BECMG 01030106 SCT035
TEMPO 01080112 04015G25KT
BECMG 01140116 CAVOK
Weather
Data
METAR EXPLAINED
KTTN 051853Z 04011KT 12SM VCTS SN FZFG BKN003 OVC010 M02M02 A3006 RMK AO2 TSB40
SLP176 P0002 T10171017
bull KTTN is the ICAO identifier for the Trenton-Mercer Airport
bull 051853Z indicates the day of the month is the 5th and the time of day is 1853 ZuluUTC 653PM GMT
or 153PM Eastern Standard Time
bull 04011KT indicates the wind is from 040deg true (north east) at 11 knots (20 kmh 13 mph) In the United
States the wind direction must have a 60deg or greater variance for variable wind direction to be reported
and the wind speed must be greater than 3 knots (56 kmh 35 mph)
bull 12SM indicates the prevailing visibility is 1frasl2 mi (800 m) SM = statute mile
bull VCTS indicates a thunderstorm (TS) in the vicinity (VC) which means from 5ndash10 mi (8ndash16 km)
bull SN indicates snow is falling at a moderate intensity a preceding plus or minus sign (+-) indicates heavy
or light precipitation Without a +- sign moderate precipitation is assumed
bull FZFG indicates the presence of freezing fog
bull BKN003 OVC010 indicates a broken (58 to 78 of the sky covered) cloud layer at 300 ft (91 m) above
ground level (AGL) and an overcast (88 of the sky covered) layer at 1000 ft (300 m)
bull M02M02 indicates the temperature is minus2degC (28degF) and the dewpoint is minus2degC (28degF) An M in
front of the number indicates that the temperaturedew point is minus ie below zero (0) Celsius
bull A3006 indicates the altimeter setting is 3006 inHg (1018 hPa)
bull RMK indicates the remarks section follows
DATA TYPES
bull Aeronautical Information Manual (AIM)
ndash SID and STAR Taxi charts
Aeronautical
Nav Data
SID
STAR
DATA TYPES
bull Airspace rules
ndash Eg seperation
Constraints amp
Rules
DATA TYPES
bull Cost Index
bull Airline (User) preferred routes
ndash User Preferences Model (UPM)
Route Type amp
Optimization
Settings
COST DEFINITION
COST INDEX EXAMPLE
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
INPUTS
bull Initial conditions (IC)
bull Flight Intent (FI)
bull User Preferences Model (UPM)
ndash ie airline policy
bull Operational Context Model (OCM)
ndash rules of airpace including
STARs and SIDs
bull ie ATFM policy
ndash Aircraft Performance Model
(APM)
bull Based on BADA
ndash Weather Model (WM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Flight Intent with User Preferences Model (UPM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull FI with UPM and Operational Context Model (OCM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory with details
DATA TYPES
bull Flight Plan
bull Regulated Flight Plan
bull Actual Flight data (Current Tactical)
bull Correlated Position data
bull CDM related data
Basic Flight
Data amp
Schedule
4D TRAJECTORY DATA PROFILES
LIPEEDFMJMP803JMPD22820110301031200BB9377945220110301031500FPLFPLAFPNEXENEXENNN2011030103150020110301031500TEFINS783849NNN00ACHN
NNN600300N00N0NDCULTNRSNNK00344154791F160N0234019032500LIPELUPOS5N10A443151N0111749EY
032955DCT7518V443121N0110416E32Y 033515DCT15038V443048N0104912E67Y 033640DCT16043V443040N0104526E75Y
033830LUPOSL99516057W443017N0103453EY 034355PARL99516099N444920N0101736EY 034735MISPOL995160127W450126N0100450EY
035305BEKANL995160169W451930N0094540EY 035720TZOL995160202N453333N0093026EY 040450PEPAGN851160260W455902N0090417EY
040730ABESIN851160280W460935N0090234EY 041350PIXOSN851160329W463619N0085859EY 041800SOPERN851160361W465322N0085640EY
042155ELMURN851160391W470924N0085427EY 042350ROLSAN851160406W471723N0085321EY 042705KUDESDCT160431W473115N0085126EN
044840DCT160597V490001N0083550E76N 045435DCT75623V491355N0083323E88N
050205EDFM3650A492821N0083051EN23032500LI040545NAS443151N0111749E460244N0090341E11600267
032500LIMMFIR040545FIR443151N0111749E460244N0090341E11600267 032500LIPECR033115ES443151N0111749E443113N0110030E194023
032500LIPECTR033115AUA443151N0111749E443113N0110030E194023 033115LIPPADS033735ES443113N0110030E443029N0104009E941602350
033115LIPPC1X033735ES443113N0110030E443029N0104009E941602350 033115LIPPCTA033735AUA443113N0110030E443029N0104009E941602350
033735LIMMECTA034805AUA443029N0104009E450310N0100300E16016050131 033735LIMMES1034805ES443029N0104009E450310N0100300E16016050131
033735LIMMES1X034805ES443029N0104009E450310N0100300E16016050131 034635LIMMR60041420ES445759N0100829E463827N0085842E160160119333
034805LIMMACTA040730AUA450310N0100300E460935N0090234E160160131280 034805LIMMADE035640ES450310N0100300E453126N0093244E160160131197
035640LIMMANE040730ES453126N0093244E460935N0090234E160160197280 040545LS042705NAS460244N0090341E473115N0085126E160160267431
040545LSASFIR042705FIR460244N0090341E473115N0085126E160160267431 040730LSAZCTA042705AUA460935N0090234E473115N0085126E160160280431
040730LSAZSSL042420ES460935N0090234E471936N0085303E160160280410 041545LSTSA50P042020CRSA464419N0085754E470300N0085520E160160344379
041545LSTSA52P041620ERSA464419N0085754E464627N0085736E160160344348 041620LSTSA51P042020ERSA464627N0085736E470300N0085520E160160348379
042020LSTSA40P042115ERSA470300N0085520E470644N0085449E160160379386
042420LSAZESL042705ES471936N0085303E473115N0085126E1601604104310344157065F160N02340 F140N023493 F160N023498 F150N0234390
F100N023439778032200LIPELUPOS5N10A443151N0111749EY 032540DCT6014V443128N0110716E25Y 032730DCT6022V443115N0110115E39Y
032800DCT6824V443111N0105944E42Y 032830DCT7027V443106N0105729E47Y 032845DCT7528V443105N0105644E49Y 032855DCT7829V443103N0105558E51Y
032910DCT8030V443102N0105513E53Y 032925DCT8032V443058N0105343E56Y 032955DCT8834V443055N0105212E60Y 033035DCT10037V443050N0104957E65Y
033040DCT10038V443048N0104912E67Y 033050DCT10439V443047N0104826E68Y 033110DCT10640V443045N0104741E70Y 033150DCT10644V443038N0104441E77Y
033155DCT11045V443037N0104355E79Y 033215LUPOSL99511057W443017N0103453EY 033240DCT11071V443638N0102907E33Y
033245DCT11472V443705N0102843E36Y 033310DCT12074V443800N0102753E40Y 033335DCT12078V443948N0102615E50Y 033345DCT12479V444016N0102550E52Y
033410DCT12880V444043N0102525E55Y 033445DCT12883V444205N0102411E62Y 033500DCT13084V444232N0102346E64Y 033515DCT13087V444353N0102232E71Y
033540DCT13789V444448N0102143E76Y 033600DCT14090V444515N0102118E79Y 033620DCT14092V444609N0102029E83Y 033640DCT14493V444637N0102004E86Y
033700DCT14094V444704N0101939E88Y 033740DCT14098V444853N0101801E98Y 033755PARL99514499N444920N0101736EY
034015DCT144120V445825N0100802E75Y 034110MISPOL995145127W450126N0100450EY 034200DCT145134V450427N0100138E17Y
034215DCT150135V450452N0100111E19Y 034250DCT150140V450702N0095854E31Y 034325DCT154142V450753N0095759E36Y
034405DCT160145V450911N0095637E43Y 034425DCT160148V451028N0095515E50Y 034520DCT160155V451329N0095203E67Y
034625DCT160162V451629N0094852E83Y 034720BEKANL995160169W451930N0094540EY 035145TZOL995160202N453333N0093026EY
035700DCT160242V455107N0091224E69Y 035925PEPAGN851160260W455902N0090417EY 040205ABESIN851160280W460935N0090234EY
040715DCT160319V463052N0085943E80Y 040840PIXOSN851160329W463619N0085859EY 041315SOPERN851160361W465322N0085640EY
041720DCT160390V470852N0085431E97Y 041730ELMURN851157391W470924N0085427EY 041755DCT150393V471028N0085418E13Y
041820DCT150397V471236N0085401E40Y 041920DCT150405V471651N0085325E93Y 041935ROLSAN851147406W471723N0085321EY
042000DCT140408V471830N0085312E8Y 042125DCT140419V472436N0085221E52Y 042205DCT140425V472755N0085154E76Y
042225DCT134427V472902N0085144E84Y 042240DCT130428V472935N0085140E88Y 042320KUDESN851121431W473115N0085126EN
042435DCT100437V473343N0085439E21N 042720ROMIRN851100459W474247N0090628EN 042825VEDOKN851100468W474724N0090714EN
042905TINOXDCT100473W475007N0090740EY 044335DCT100571G484048N0084511EY 045005DCT100607V485957N0083916E68Y
045040DCT94609V490101N0083856E72Y 045100DCT94611V490205N0083836E75Y 045140DCT84614V490341N0083807E81Y 045200DCT84616V490445N0083747E85Y
045240DCT74619V490620N0083717E91Y 045345INKAMDCT54624W490900N0083628EY 045655DCT54642V491820N0083258E56Y
045950DCT16656G492536N0083015EY 050110EDFM3661A492821N0083051EY39032200LI040020NAS443151N0111749E460244N0090341E11600267
032200LIMMFIR040020FIR443151N0111749E460244N0090341E11600267 032200LIPECR033020ES443151N0111749E443052N0105042E196036
032200LIPECTR033020AUA443151N0111749E443052N0105042E196036 033020LIPPADS033205ES443052N0105042E443029N0104009E961103650
033020LIPPC1X033205ES443052N0105042E443029N0104009E961103650 033020LIPPCTA033205AUA443052N0105042E443029N0104009E961103650
033205LIMMECTA034140AUA443029N0104009E450310N0100300E11014550131 033205LIMMES1034140ES443029N0104009E450310N0100300E11014550131
4D TRAJECTORY DATA PROFILES
Tactical flight Models
bull FTFM - Filed Tactical Flight Model The FTFM is the
ldquoinitialrdquo profile as it reflects the status of the demand before
activation of the regulation plan It is computed with the latest
flight plan version sent by each AO to the CFMUIFPS
bull RTFM - Regulated Tactical Flight Model The RTFM is the
ldquoregulatedrdquo profile as it reflects the status of the demand after
activation of the regulation plan It is computed with the latest
ATFM slot (CTOT) issued to the AO by the ground
regulation system
bull CTFM - Current Tactical Flight Model The CTFM is the
ldquoactualrdquo profile as it integrates the actual entry time of the
flights in the regulated TV It is computed with the Radar
Data sent by ACCs to CFMUETFMS ref
CPG_GEN - Profiles generated by the CFMU path generation
tool
bull SCR - Shortest Constrained Route
bull SRR - Shortest RAD restriction applied Route
bull SUR - Shortest Unconstrained Route
bull DCT - Direct route
CPF - Correlated Position reports for a Flight CPRs
(Correlated Position Reports) which are surveillance data
collected from the ACCs
Filed Flight Plan
CDM
Header
Point Profile
Airspace Profile
Circle Intersection
Profile
RTFM Profile
CTFM Profile
CFP Profile
FTFM Profile
4D TRAJECTORY DATA PROFILES
Current Tactical Flight Model (CTFM) is computed with Radar Data sent by
Area Control Centers to CFMUETFMS so it can be deemed as a fused
version of FTFM with real data
ENHANCED TACTICAL FLOW MANAGEMENT SYSTEM (ETFMS) EUROCONTROL 2013
DATA TYPES
bull Base of Aircraft Data (BADA) depending on ac type
ndash Nominal control variables (BADA 3)
ndash Full flight variable envelope (BADA 4)
bull optimization
Aircraft
Performance
Data
AIRCRAFT EQUATION OF MOTION
bull equation of motion sufficient in 3 dof
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
number of parameters of the system that may vary independently
BASE OF AIRCRAFT DATA (BADA)
bull There are two families of BADA APM based on the same modelling approach and components [EUROCONTROL]
bull BADA Family 3ndash providing a 90 coverage of the current aircraft types operating
in the ECAC airspace
ndash model aircraft behaviour over the normal operations part of the flight envelope and to meet todays requirements for aircraft performance modelling and simulation
bull BADA Family 4 ndash a newly developed model intended to meet advanced functional
and precision requirements of the new ATM systems
ndash providing a 60 coverage of the current aircraft types operating in ECAC airspace
ndash BADA 4 provides accurate modelling of aircraft over the entire flight envelope and enables modelling and simulation of advanced concepts of future systems
AIRCRAFT PERFORMANCE MODEL
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
BADA AIRCRAFT LIMITATION MODEL
DATA TYPES
bull Business objectives
ndash Cost Index
ndash User Preferences Model (UPM)
ndash Ground delays due to connectionshellip
Business Rules
euro
HORIZONTAL OPTIMISATION
TO_WPT FROM_WPT Cost
A
B
C
DEP
DEP
DEP
21
25
23
A
A
E
B
52
40
CG 45
B
B
E
F
49
53
G
G
F
J
73
79
E
E
K
H
84
75
F
F
H
I
70
67
I
I
L
M
96
85
HL 86
JM 119
KO 117
KL 109
MQ 115
LP 118
QDEST 134
OP 136
PDEST 130
Worklist
Dijkstra algorithm
DEPDEST
16
40
19
12
19
J
28
34
I14
17
O33
25
Q30
P32
F24
28
D
E
19
31
G22
A
B
C
2125
23
H
K
35
26 L
M18
29
1) Selection of segments for current from- waypoint
2) Calculation of costs for selected segments
3) Entering calculated datasets into worklist
4) Selection of best dataset from worklist
5) To- waypoint of best dataset becomes from- waypoint
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS

12
TRAJECTORY RELATED INFORMATION
AIRCRAFT INTENT
TP2
TPI
TPP
TPR
TPK
TP5
TPL
TPH
Translator
I-5
Translator
R-5
Translator
2-K
Translator
R-2
Translator
2-5
Translator
I-2
Translator
H-5
Translator
R-P
N (N-1) divide 2TRANSLATORS
Translator
K-P
Translator
5-K
Translator
I-R
Translator
5-P
Translator
L-5
Translator
I-H
Translator
H-L
Translator
R-K
Translator
L-P
SHARING TRAJECTORY-RELATED INFORMATION
13
TP2
TPI
TPP
TPR
TPK
TP5
TPL
TPH
Translator
L-AIDL
AIDL
Translator
5-AIDL
Translator
P-AIDL
Translator
K-AIDL
Translator
R-AIDL
Translator
2-AIDL
Translator
H-AIDL
Translator
I-AIDL
N TRANSLATORS
SHARING TRAJECTORY-RELATED INFORMATION
externalinternal
Constraints amp
Rules
Aeronautical
Nav Data
Weather
Data
Basic Flight
Data amp
Schedule
Route Type amp
Optimization
Settings
Aircraft
Performance
Data
Business Rules
euroFlight
Number
City Pair
Alternate
ADES
DOF STD
Fuel Policy AC Type
AC
Equipment
AC
Envelope
Payload
Payload -
Range
Wind
Condition
Air Pressure
Air Temp
Natural
Hazards
Stat Dyn
Routes
Fix Free
Route
Opt Criteria
Cost Index
Traffic
Rights
RNAV Rules
NOTAM
TFR
(eg RAD)
Terrain
Clearance
Terminal
Procedures
DCT
Connection
Airport
Definition
Flight
connectivity
Human Req
Time Costs
Business
Targets
Business
Constraints
Conditional
Routes
DATA TYPES
bull METARTAF
LTBA 312020Z 05006KT 030V100 CAVOK 1908 Q1018 NOSIG
TAF LTBA 311640Z 31180124 03009KT CAVOK
BECMG 01030106 SCT035
TEMPO 01080112 04015G25KT
BECMG 01140116 CAVOK
Weather
Data
METAR EXPLAINED
KTTN 051853Z 04011KT 12SM VCTS SN FZFG BKN003 OVC010 M02M02 A3006 RMK AO2 TSB40
SLP176 P0002 T10171017
bull KTTN is the ICAO identifier for the Trenton-Mercer Airport
bull 051853Z indicates the day of the month is the 5th and the time of day is 1853 ZuluUTC 653PM GMT
or 153PM Eastern Standard Time
bull 04011KT indicates the wind is from 040deg true (north east) at 11 knots (20 kmh 13 mph) In the United
States the wind direction must have a 60deg or greater variance for variable wind direction to be reported
and the wind speed must be greater than 3 knots (56 kmh 35 mph)
bull 12SM indicates the prevailing visibility is 1frasl2 mi (800 m) SM = statute mile
bull VCTS indicates a thunderstorm (TS) in the vicinity (VC) which means from 5ndash10 mi (8ndash16 km)
bull SN indicates snow is falling at a moderate intensity a preceding plus or minus sign (+-) indicates heavy
or light precipitation Without a +- sign moderate precipitation is assumed
bull FZFG indicates the presence of freezing fog
bull BKN003 OVC010 indicates a broken (58 to 78 of the sky covered) cloud layer at 300 ft (91 m) above
ground level (AGL) and an overcast (88 of the sky covered) layer at 1000 ft (300 m)
bull M02M02 indicates the temperature is minus2degC (28degF) and the dewpoint is minus2degC (28degF) An M in
front of the number indicates that the temperaturedew point is minus ie below zero (0) Celsius
bull A3006 indicates the altimeter setting is 3006 inHg (1018 hPa)
bull RMK indicates the remarks section follows
DATA TYPES
bull Aeronautical Information Manual (AIM)
ndash SID and STAR Taxi charts
Aeronautical
Nav Data
SID
STAR
DATA TYPES
bull Airspace rules
ndash Eg seperation
Constraints amp
Rules
DATA TYPES
bull Cost Index
bull Airline (User) preferred routes
ndash User Preferences Model (UPM)
Route Type amp
Optimization
Settings
COST DEFINITION
COST INDEX EXAMPLE
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
INPUTS
bull Initial conditions (IC)
bull Flight Intent (FI)
bull User Preferences Model (UPM)
ndash ie airline policy
bull Operational Context Model (OCM)
ndash rules of airpace including
STARs and SIDs
bull ie ATFM policy
ndash Aircraft Performance Model
(APM)
bull Based on BADA
ndash Weather Model (WM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Flight Intent with User Preferences Model (UPM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull FI with UPM and Operational Context Model (OCM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory with details
DATA TYPES
bull Flight Plan
bull Regulated Flight Plan
bull Actual Flight data (Current Tactical)
bull Correlated Position data
bull CDM related data
Basic Flight
Data amp
Schedule
4D TRAJECTORY DATA PROFILES
LIPEEDFMJMP803JMPD22820110301031200BB9377945220110301031500FPLFPLAFPNEXENEXENNN2011030103150020110301031500TEFINS783849NNN00ACHN
NNN600300N00N0NDCULTNRSNNK00344154791F160N0234019032500LIPELUPOS5N10A443151N0111749EY
032955DCT7518V443121N0110416E32Y 033515DCT15038V443048N0104912E67Y 033640DCT16043V443040N0104526E75Y
033830LUPOSL99516057W443017N0103453EY 034355PARL99516099N444920N0101736EY 034735MISPOL995160127W450126N0100450EY
035305BEKANL995160169W451930N0094540EY 035720TZOL995160202N453333N0093026EY 040450PEPAGN851160260W455902N0090417EY
040730ABESIN851160280W460935N0090234EY 041350PIXOSN851160329W463619N0085859EY 041800SOPERN851160361W465322N0085640EY
042155ELMURN851160391W470924N0085427EY 042350ROLSAN851160406W471723N0085321EY 042705KUDESDCT160431W473115N0085126EN
044840DCT160597V490001N0083550E76N 045435DCT75623V491355N0083323E88N
050205EDFM3650A492821N0083051EN23032500LI040545NAS443151N0111749E460244N0090341E11600267
032500LIMMFIR040545FIR443151N0111749E460244N0090341E11600267 032500LIPECR033115ES443151N0111749E443113N0110030E194023
032500LIPECTR033115AUA443151N0111749E443113N0110030E194023 033115LIPPADS033735ES443113N0110030E443029N0104009E941602350
033115LIPPC1X033735ES443113N0110030E443029N0104009E941602350 033115LIPPCTA033735AUA443113N0110030E443029N0104009E941602350
033735LIMMECTA034805AUA443029N0104009E450310N0100300E16016050131 033735LIMMES1034805ES443029N0104009E450310N0100300E16016050131
033735LIMMES1X034805ES443029N0104009E450310N0100300E16016050131 034635LIMMR60041420ES445759N0100829E463827N0085842E160160119333
034805LIMMACTA040730AUA450310N0100300E460935N0090234E160160131280 034805LIMMADE035640ES450310N0100300E453126N0093244E160160131197
035640LIMMANE040730ES453126N0093244E460935N0090234E160160197280 040545LS042705NAS460244N0090341E473115N0085126E160160267431
040545LSASFIR042705FIR460244N0090341E473115N0085126E160160267431 040730LSAZCTA042705AUA460935N0090234E473115N0085126E160160280431
040730LSAZSSL042420ES460935N0090234E471936N0085303E160160280410 041545LSTSA50P042020CRSA464419N0085754E470300N0085520E160160344379
041545LSTSA52P041620ERSA464419N0085754E464627N0085736E160160344348 041620LSTSA51P042020ERSA464627N0085736E470300N0085520E160160348379
042020LSTSA40P042115ERSA470300N0085520E470644N0085449E160160379386
042420LSAZESL042705ES471936N0085303E473115N0085126E1601604104310344157065F160N02340 F140N023493 F160N023498 F150N0234390
F100N023439778032200LIPELUPOS5N10A443151N0111749EY 032540DCT6014V443128N0110716E25Y 032730DCT6022V443115N0110115E39Y
032800DCT6824V443111N0105944E42Y 032830DCT7027V443106N0105729E47Y 032845DCT7528V443105N0105644E49Y 032855DCT7829V443103N0105558E51Y
032910DCT8030V443102N0105513E53Y 032925DCT8032V443058N0105343E56Y 032955DCT8834V443055N0105212E60Y 033035DCT10037V443050N0104957E65Y
033040DCT10038V443048N0104912E67Y 033050DCT10439V443047N0104826E68Y 033110DCT10640V443045N0104741E70Y 033150DCT10644V443038N0104441E77Y
033155DCT11045V443037N0104355E79Y 033215LUPOSL99511057W443017N0103453EY 033240DCT11071V443638N0102907E33Y
033245DCT11472V443705N0102843E36Y 033310DCT12074V443800N0102753E40Y 033335DCT12078V443948N0102615E50Y 033345DCT12479V444016N0102550E52Y
033410DCT12880V444043N0102525E55Y 033445DCT12883V444205N0102411E62Y 033500DCT13084V444232N0102346E64Y 033515DCT13087V444353N0102232E71Y
033540DCT13789V444448N0102143E76Y 033600DCT14090V444515N0102118E79Y 033620DCT14092V444609N0102029E83Y 033640DCT14493V444637N0102004E86Y
033700DCT14094V444704N0101939E88Y 033740DCT14098V444853N0101801E98Y 033755PARL99514499N444920N0101736EY
034015DCT144120V445825N0100802E75Y 034110MISPOL995145127W450126N0100450EY 034200DCT145134V450427N0100138E17Y
034215DCT150135V450452N0100111E19Y 034250DCT150140V450702N0095854E31Y 034325DCT154142V450753N0095759E36Y
034405DCT160145V450911N0095637E43Y 034425DCT160148V451028N0095515E50Y 034520DCT160155V451329N0095203E67Y
034625DCT160162V451629N0094852E83Y 034720BEKANL995160169W451930N0094540EY 035145TZOL995160202N453333N0093026EY
035700DCT160242V455107N0091224E69Y 035925PEPAGN851160260W455902N0090417EY 040205ABESIN851160280W460935N0090234EY
040715DCT160319V463052N0085943E80Y 040840PIXOSN851160329W463619N0085859EY 041315SOPERN851160361W465322N0085640EY
041720DCT160390V470852N0085431E97Y 041730ELMURN851157391W470924N0085427EY 041755DCT150393V471028N0085418E13Y
041820DCT150397V471236N0085401E40Y 041920DCT150405V471651N0085325E93Y 041935ROLSAN851147406W471723N0085321EY
042000DCT140408V471830N0085312E8Y 042125DCT140419V472436N0085221E52Y 042205DCT140425V472755N0085154E76Y
042225DCT134427V472902N0085144E84Y 042240DCT130428V472935N0085140E88Y 042320KUDESN851121431W473115N0085126EN
042435DCT100437V473343N0085439E21N 042720ROMIRN851100459W474247N0090628EN 042825VEDOKN851100468W474724N0090714EN
042905TINOXDCT100473W475007N0090740EY 044335DCT100571G484048N0084511EY 045005DCT100607V485957N0083916E68Y
045040DCT94609V490101N0083856E72Y 045100DCT94611V490205N0083836E75Y 045140DCT84614V490341N0083807E81Y 045200DCT84616V490445N0083747E85Y
045240DCT74619V490620N0083717E91Y 045345INKAMDCT54624W490900N0083628EY 045655DCT54642V491820N0083258E56Y
045950DCT16656G492536N0083015EY 050110EDFM3661A492821N0083051EY39032200LI040020NAS443151N0111749E460244N0090341E11600267
032200LIMMFIR040020FIR443151N0111749E460244N0090341E11600267 032200LIPECR033020ES443151N0111749E443052N0105042E196036
032200LIPECTR033020AUA443151N0111749E443052N0105042E196036 033020LIPPADS033205ES443052N0105042E443029N0104009E961103650
033020LIPPC1X033205ES443052N0105042E443029N0104009E961103650 033020LIPPCTA033205AUA443052N0105042E443029N0104009E961103650
033205LIMMECTA034140AUA443029N0104009E450310N0100300E11014550131 033205LIMMES1034140ES443029N0104009E450310N0100300E11014550131
4D TRAJECTORY DATA PROFILES
Tactical flight Models
bull FTFM - Filed Tactical Flight Model The FTFM is the
ldquoinitialrdquo profile as it reflects the status of the demand before
activation of the regulation plan It is computed with the latest
flight plan version sent by each AO to the CFMUIFPS
bull RTFM - Regulated Tactical Flight Model The RTFM is the
ldquoregulatedrdquo profile as it reflects the status of the demand after
activation of the regulation plan It is computed with the latest
ATFM slot (CTOT) issued to the AO by the ground
regulation system
bull CTFM - Current Tactical Flight Model The CTFM is the
ldquoactualrdquo profile as it integrates the actual entry time of the
flights in the regulated TV It is computed with the Radar
Data sent by ACCs to CFMUETFMS ref
CPG_GEN - Profiles generated by the CFMU path generation
tool
bull SCR - Shortest Constrained Route
bull SRR - Shortest RAD restriction applied Route
bull SUR - Shortest Unconstrained Route
bull DCT - Direct route
CPF - Correlated Position reports for a Flight CPRs
(Correlated Position Reports) which are surveillance data
collected from the ACCs
Filed Flight Plan
CDM
Header
Point Profile
Airspace Profile
Circle Intersection
Profile
RTFM Profile
CTFM Profile
CFP Profile
FTFM Profile
4D TRAJECTORY DATA PROFILES
Current Tactical Flight Model (CTFM) is computed with Radar Data sent by
Area Control Centers to CFMUETFMS so it can be deemed as a fused
version of FTFM with real data
ENHANCED TACTICAL FLOW MANAGEMENT SYSTEM (ETFMS) EUROCONTROL 2013
DATA TYPES
bull Base of Aircraft Data (BADA) depending on ac type
ndash Nominal control variables (BADA 3)
ndash Full flight variable envelope (BADA 4)
bull optimization
Aircraft
Performance
Data
AIRCRAFT EQUATION OF MOTION
bull equation of motion sufficient in 3 dof
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
number of parameters of the system that may vary independently
BASE OF AIRCRAFT DATA (BADA)
bull There are two families of BADA APM based on the same modelling approach and components [EUROCONTROL]
bull BADA Family 3ndash providing a 90 coverage of the current aircraft types operating
in the ECAC airspace
ndash model aircraft behaviour over the normal operations part of the flight envelope and to meet todays requirements for aircraft performance modelling and simulation
bull BADA Family 4 ndash a newly developed model intended to meet advanced functional
and precision requirements of the new ATM systems
ndash providing a 60 coverage of the current aircraft types operating in ECAC airspace
ndash BADA 4 provides accurate modelling of aircraft over the entire flight envelope and enables modelling and simulation of advanced concepts of future systems
AIRCRAFT PERFORMANCE MODEL
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
BADA AIRCRAFT LIMITATION MODEL
DATA TYPES
bull Business objectives
ndash Cost Index
ndash User Preferences Model (UPM)
ndash Ground delays due to connectionshellip
Business Rules
euro
HORIZONTAL OPTIMISATION
TO_WPT FROM_WPT Cost
A
B
C
DEP
DEP
DEP
21
25
23
A
A
E
B
52
40
CG 45
B
B
E
F
49
53
G
G
F
J
73
79
E
E
K
H
84
75
F
F
H
I
70
67
I
I
L
M
96
85
HL 86
JM 119
KO 117
KL 109
MQ 115
LP 118
QDEST 134
OP 136
PDEST 130
Worklist
Dijkstra algorithm
DEPDEST
16
40
19
12
19
J
28
34
I14
17
O33
25
Q30
P32
F24
28
D
E
19
31
G22
A
B
C
2125
23
H
K
35
26 L
M18
29
1) Selection of segments for current from- waypoint
2) Calculation of costs for selected segments
3) Entering calculated datasets into worklist
4) Selection of best dataset from worklist
5) To- waypoint of best dataset becomes from- waypoint
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
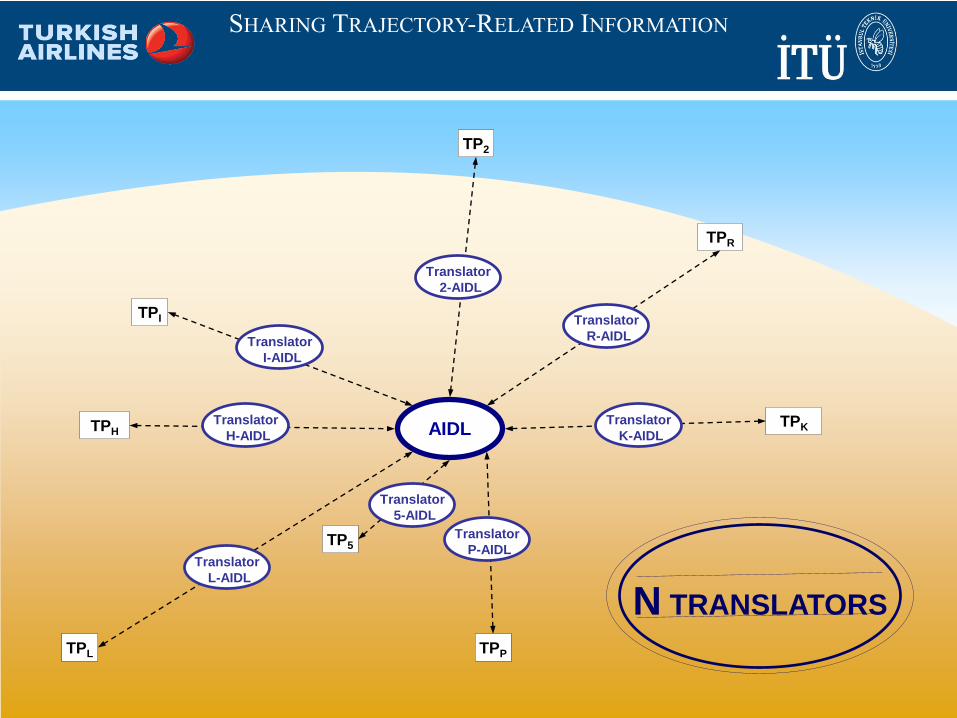
13
TP2
TPI
TPP
TPR
TPK
TP5
TPL
TPH
Translator
L-AIDL
AIDL
Translator
5-AIDL
Translator
P-AIDL
Translator
K-AIDL
Translator
R-AIDL
Translator
2-AIDL
Translator
H-AIDL
Translator
I-AIDL
N TRANSLATORS
SHARING TRAJECTORY-RELATED INFORMATION
externalinternal
Constraints amp
Rules
Aeronautical
Nav Data
Weather
Data
Basic Flight
Data amp
Schedule
Route Type amp
Optimization
Settings
Aircraft
Performance
Data
Business Rules
euroFlight
Number
City Pair
Alternate
ADES
DOF STD
Fuel Policy AC Type
AC
Equipment
AC
Envelope
Payload
Payload -
Range
Wind
Condition
Air Pressure
Air Temp
Natural
Hazards
Stat Dyn
Routes
Fix Free
Route
Opt Criteria
Cost Index
Traffic
Rights
RNAV Rules
NOTAM
TFR
(eg RAD)
Terrain
Clearance
Terminal
Procedures
DCT
Connection
Airport
Definition
Flight
connectivity
Human Req
Time Costs
Business
Targets
Business
Constraints
Conditional
Routes
DATA TYPES
bull METARTAF
LTBA 312020Z 05006KT 030V100 CAVOK 1908 Q1018 NOSIG
TAF LTBA 311640Z 31180124 03009KT CAVOK
BECMG 01030106 SCT035
TEMPO 01080112 04015G25KT
BECMG 01140116 CAVOK
Weather
Data
METAR EXPLAINED
KTTN 051853Z 04011KT 12SM VCTS SN FZFG BKN003 OVC010 M02M02 A3006 RMK AO2 TSB40
SLP176 P0002 T10171017
bull KTTN is the ICAO identifier for the Trenton-Mercer Airport
bull 051853Z indicates the day of the month is the 5th and the time of day is 1853 ZuluUTC 653PM GMT
or 153PM Eastern Standard Time
bull 04011KT indicates the wind is from 040deg true (north east) at 11 knots (20 kmh 13 mph) In the United
States the wind direction must have a 60deg or greater variance for variable wind direction to be reported
and the wind speed must be greater than 3 knots (56 kmh 35 mph)
bull 12SM indicates the prevailing visibility is 1frasl2 mi (800 m) SM = statute mile
bull VCTS indicates a thunderstorm (TS) in the vicinity (VC) which means from 5ndash10 mi (8ndash16 km)
bull SN indicates snow is falling at a moderate intensity a preceding plus or minus sign (+-) indicates heavy
or light precipitation Without a +- sign moderate precipitation is assumed
bull FZFG indicates the presence of freezing fog
bull BKN003 OVC010 indicates a broken (58 to 78 of the sky covered) cloud layer at 300 ft (91 m) above
ground level (AGL) and an overcast (88 of the sky covered) layer at 1000 ft (300 m)
bull M02M02 indicates the temperature is minus2degC (28degF) and the dewpoint is minus2degC (28degF) An M in
front of the number indicates that the temperaturedew point is minus ie below zero (0) Celsius
bull A3006 indicates the altimeter setting is 3006 inHg (1018 hPa)
bull RMK indicates the remarks section follows
DATA TYPES
bull Aeronautical Information Manual (AIM)
ndash SID and STAR Taxi charts
Aeronautical
Nav Data
SID
STAR
DATA TYPES
bull Airspace rules
ndash Eg seperation
Constraints amp
Rules
DATA TYPES
bull Cost Index
bull Airline (User) preferred routes
ndash User Preferences Model (UPM)
Route Type amp
Optimization
Settings
COST DEFINITION
COST INDEX EXAMPLE
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
INPUTS
bull Initial conditions (IC)
bull Flight Intent (FI)
bull User Preferences Model (UPM)
ndash ie airline policy
bull Operational Context Model (OCM)
ndash rules of airpace including
STARs and SIDs
bull ie ATFM policy
ndash Aircraft Performance Model
(APM)
bull Based on BADA
ndash Weather Model (WM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Flight Intent with User Preferences Model (UPM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull FI with UPM and Operational Context Model (OCM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory with details
DATA TYPES
bull Flight Plan
bull Regulated Flight Plan
bull Actual Flight data (Current Tactical)
bull Correlated Position data
bull CDM related data
Basic Flight
Data amp
Schedule
4D TRAJECTORY DATA PROFILES
LIPEEDFMJMP803JMPD22820110301031200BB9377945220110301031500FPLFPLAFPNEXENEXENNN2011030103150020110301031500TEFINS783849NNN00ACHN
NNN600300N00N0NDCULTNRSNNK00344154791F160N0234019032500LIPELUPOS5N10A443151N0111749EY
032955DCT7518V443121N0110416E32Y 033515DCT15038V443048N0104912E67Y 033640DCT16043V443040N0104526E75Y
033830LUPOSL99516057W443017N0103453EY 034355PARL99516099N444920N0101736EY 034735MISPOL995160127W450126N0100450EY
035305BEKANL995160169W451930N0094540EY 035720TZOL995160202N453333N0093026EY 040450PEPAGN851160260W455902N0090417EY
040730ABESIN851160280W460935N0090234EY 041350PIXOSN851160329W463619N0085859EY 041800SOPERN851160361W465322N0085640EY
042155ELMURN851160391W470924N0085427EY 042350ROLSAN851160406W471723N0085321EY 042705KUDESDCT160431W473115N0085126EN
044840DCT160597V490001N0083550E76N 045435DCT75623V491355N0083323E88N
050205EDFM3650A492821N0083051EN23032500LI040545NAS443151N0111749E460244N0090341E11600267
032500LIMMFIR040545FIR443151N0111749E460244N0090341E11600267 032500LIPECR033115ES443151N0111749E443113N0110030E194023
032500LIPECTR033115AUA443151N0111749E443113N0110030E194023 033115LIPPADS033735ES443113N0110030E443029N0104009E941602350
033115LIPPC1X033735ES443113N0110030E443029N0104009E941602350 033115LIPPCTA033735AUA443113N0110030E443029N0104009E941602350
033735LIMMECTA034805AUA443029N0104009E450310N0100300E16016050131 033735LIMMES1034805ES443029N0104009E450310N0100300E16016050131
033735LIMMES1X034805ES443029N0104009E450310N0100300E16016050131 034635LIMMR60041420ES445759N0100829E463827N0085842E160160119333
034805LIMMACTA040730AUA450310N0100300E460935N0090234E160160131280 034805LIMMADE035640ES450310N0100300E453126N0093244E160160131197
035640LIMMANE040730ES453126N0093244E460935N0090234E160160197280 040545LS042705NAS460244N0090341E473115N0085126E160160267431
040545LSASFIR042705FIR460244N0090341E473115N0085126E160160267431 040730LSAZCTA042705AUA460935N0090234E473115N0085126E160160280431
040730LSAZSSL042420ES460935N0090234E471936N0085303E160160280410 041545LSTSA50P042020CRSA464419N0085754E470300N0085520E160160344379
041545LSTSA52P041620ERSA464419N0085754E464627N0085736E160160344348 041620LSTSA51P042020ERSA464627N0085736E470300N0085520E160160348379
042020LSTSA40P042115ERSA470300N0085520E470644N0085449E160160379386
042420LSAZESL042705ES471936N0085303E473115N0085126E1601604104310344157065F160N02340 F140N023493 F160N023498 F150N0234390
F100N023439778032200LIPELUPOS5N10A443151N0111749EY 032540DCT6014V443128N0110716E25Y 032730DCT6022V443115N0110115E39Y
032800DCT6824V443111N0105944E42Y 032830DCT7027V443106N0105729E47Y 032845DCT7528V443105N0105644E49Y 032855DCT7829V443103N0105558E51Y
032910DCT8030V443102N0105513E53Y 032925DCT8032V443058N0105343E56Y 032955DCT8834V443055N0105212E60Y 033035DCT10037V443050N0104957E65Y
033040DCT10038V443048N0104912E67Y 033050DCT10439V443047N0104826E68Y 033110DCT10640V443045N0104741E70Y 033150DCT10644V443038N0104441E77Y
033155DCT11045V443037N0104355E79Y 033215LUPOSL99511057W443017N0103453EY 033240DCT11071V443638N0102907E33Y
033245DCT11472V443705N0102843E36Y 033310DCT12074V443800N0102753E40Y 033335DCT12078V443948N0102615E50Y 033345DCT12479V444016N0102550E52Y
033410DCT12880V444043N0102525E55Y 033445DCT12883V444205N0102411E62Y 033500DCT13084V444232N0102346E64Y 033515DCT13087V444353N0102232E71Y
033540DCT13789V444448N0102143E76Y 033600DCT14090V444515N0102118E79Y 033620DCT14092V444609N0102029E83Y 033640DCT14493V444637N0102004E86Y
033700DCT14094V444704N0101939E88Y 033740DCT14098V444853N0101801E98Y 033755PARL99514499N444920N0101736EY
034015DCT144120V445825N0100802E75Y 034110MISPOL995145127W450126N0100450EY 034200DCT145134V450427N0100138E17Y
034215DCT150135V450452N0100111E19Y 034250DCT150140V450702N0095854E31Y 034325DCT154142V450753N0095759E36Y
034405DCT160145V450911N0095637E43Y 034425DCT160148V451028N0095515E50Y 034520DCT160155V451329N0095203E67Y
034625DCT160162V451629N0094852E83Y 034720BEKANL995160169W451930N0094540EY 035145TZOL995160202N453333N0093026EY
035700DCT160242V455107N0091224E69Y 035925PEPAGN851160260W455902N0090417EY 040205ABESIN851160280W460935N0090234EY
040715DCT160319V463052N0085943E80Y 040840PIXOSN851160329W463619N0085859EY 041315SOPERN851160361W465322N0085640EY
041720DCT160390V470852N0085431E97Y 041730ELMURN851157391W470924N0085427EY 041755DCT150393V471028N0085418E13Y
041820DCT150397V471236N0085401E40Y 041920DCT150405V471651N0085325E93Y 041935ROLSAN851147406W471723N0085321EY
042000DCT140408V471830N0085312E8Y 042125DCT140419V472436N0085221E52Y 042205DCT140425V472755N0085154E76Y
042225DCT134427V472902N0085144E84Y 042240DCT130428V472935N0085140E88Y 042320KUDESN851121431W473115N0085126EN
042435DCT100437V473343N0085439E21N 042720ROMIRN851100459W474247N0090628EN 042825VEDOKN851100468W474724N0090714EN
042905TINOXDCT100473W475007N0090740EY 044335DCT100571G484048N0084511EY 045005DCT100607V485957N0083916E68Y
045040DCT94609V490101N0083856E72Y 045100DCT94611V490205N0083836E75Y 045140DCT84614V490341N0083807E81Y 045200DCT84616V490445N0083747E85Y
045240DCT74619V490620N0083717E91Y 045345INKAMDCT54624W490900N0083628EY 045655DCT54642V491820N0083258E56Y
045950DCT16656G492536N0083015EY 050110EDFM3661A492821N0083051EY39032200LI040020NAS443151N0111749E460244N0090341E11600267
032200LIMMFIR040020FIR443151N0111749E460244N0090341E11600267 032200LIPECR033020ES443151N0111749E443052N0105042E196036
032200LIPECTR033020AUA443151N0111749E443052N0105042E196036 033020LIPPADS033205ES443052N0105042E443029N0104009E961103650
033020LIPPC1X033205ES443052N0105042E443029N0104009E961103650 033020LIPPCTA033205AUA443052N0105042E443029N0104009E961103650
033205LIMMECTA034140AUA443029N0104009E450310N0100300E11014550131 033205LIMMES1034140ES443029N0104009E450310N0100300E11014550131
4D TRAJECTORY DATA PROFILES
Tactical flight Models
bull FTFM - Filed Tactical Flight Model The FTFM is the
ldquoinitialrdquo profile as it reflects the status of the demand before
activation of the regulation plan It is computed with the latest
flight plan version sent by each AO to the CFMUIFPS
bull RTFM - Regulated Tactical Flight Model The RTFM is the
ldquoregulatedrdquo profile as it reflects the status of the demand after
activation of the regulation plan It is computed with the latest
ATFM slot (CTOT) issued to the AO by the ground
regulation system
bull CTFM - Current Tactical Flight Model The CTFM is the
ldquoactualrdquo profile as it integrates the actual entry time of the
flights in the regulated TV It is computed with the Radar
Data sent by ACCs to CFMUETFMS ref
CPG_GEN - Profiles generated by the CFMU path generation
tool
bull SCR - Shortest Constrained Route
bull SRR - Shortest RAD restriction applied Route
bull SUR - Shortest Unconstrained Route
bull DCT - Direct route
CPF - Correlated Position reports for a Flight CPRs
(Correlated Position Reports) which are surveillance data
collected from the ACCs
Filed Flight Plan
CDM
Header
Point Profile
Airspace Profile
Circle Intersection
Profile
RTFM Profile
CTFM Profile
CFP Profile
FTFM Profile
4D TRAJECTORY DATA PROFILES
Current Tactical Flight Model (CTFM) is computed with Radar Data sent by
Area Control Centers to CFMUETFMS so it can be deemed as a fused
version of FTFM with real data
ENHANCED TACTICAL FLOW MANAGEMENT SYSTEM (ETFMS) EUROCONTROL 2013
DATA TYPES
bull Base of Aircraft Data (BADA) depending on ac type
ndash Nominal control variables (BADA 3)
ndash Full flight variable envelope (BADA 4)
bull optimization
Aircraft
Performance
Data
AIRCRAFT EQUATION OF MOTION
bull equation of motion sufficient in 3 dof
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
number of parameters of the system that may vary independently
BASE OF AIRCRAFT DATA (BADA)
bull There are two families of BADA APM based on the same modelling approach and components [EUROCONTROL]
bull BADA Family 3ndash providing a 90 coverage of the current aircraft types operating
in the ECAC airspace
ndash model aircraft behaviour over the normal operations part of the flight envelope and to meet todays requirements for aircraft performance modelling and simulation
bull BADA Family 4 ndash a newly developed model intended to meet advanced functional
and precision requirements of the new ATM systems
ndash providing a 60 coverage of the current aircraft types operating in ECAC airspace
ndash BADA 4 provides accurate modelling of aircraft over the entire flight envelope and enables modelling and simulation of advanced concepts of future systems
AIRCRAFT PERFORMANCE MODEL
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
BADA AIRCRAFT LIMITATION MODEL
DATA TYPES
bull Business objectives
ndash Cost Index
ndash User Preferences Model (UPM)
ndash Ground delays due to connectionshellip
Business Rules
euro
HORIZONTAL OPTIMISATION
TO_WPT FROM_WPT Cost
A
B
C
DEP
DEP
DEP
21
25
23
A
A
E
B
52
40
CG 45
B
B
E
F
49
53
G
G
F
J
73
79
E
E
K
H
84
75
F
F
H
I
70
67
I
I
L
M
96
85
HL 86
JM 119
KO 117
KL 109
MQ 115
LP 118
QDEST 134
OP 136
PDEST 130
Worklist
Dijkstra algorithm
DEPDEST
16
40
19
12
19
J
28
34
I14
17
O33
25
Q30
P32
F24
28
D
E
19
31
G22
A
B
C
2125
23
H
K
35
26 L
M18
29
1) Selection of segments for current from- waypoint
2) Calculation of costs for selected segments
3) Entering calculated datasets into worklist
4) Selection of best dataset from worklist
5) To- waypoint of best dataset becomes from- waypoint
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS

externalinternal
Constraints amp
Rules
Aeronautical
Nav Data
Weather
Data
Basic Flight
Data amp
Schedule
Route Type amp
Optimization
Settings
Aircraft
Performance
Data
Business Rules
euroFlight
Number
City Pair
Alternate
ADES
DOF STD
Fuel Policy AC Type
AC
Equipment
AC
Envelope
Payload
Payload -
Range
Wind
Condition
Air Pressure
Air Temp
Natural
Hazards
Stat Dyn
Routes
Fix Free
Route
Opt Criteria
Cost Index
Traffic
Rights
RNAV Rules
NOTAM
TFR
(eg RAD)
Terrain
Clearance
Terminal
Procedures
DCT
Connection
Airport
Definition
Flight
connectivity
Human Req
Time Costs
Business
Targets
Business
Constraints
Conditional
Routes
DATA TYPES
bull METARTAF
LTBA 312020Z 05006KT 030V100 CAVOK 1908 Q1018 NOSIG
TAF LTBA 311640Z 31180124 03009KT CAVOK
BECMG 01030106 SCT035
TEMPO 01080112 04015G25KT
BECMG 01140116 CAVOK
Weather
Data
METAR EXPLAINED
KTTN 051853Z 04011KT 12SM VCTS SN FZFG BKN003 OVC010 M02M02 A3006 RMK AO2 TSB40
SLP176 P0002 T10171017
bull KTTN is the ICAO identifier for the Trenton-Mercer Airport
bull 051853Z indicates the day of the month is the 5th and the time of day is 1853 ZuluUTC 653PM GMT
or 153PM Eastern Standard Time
bull 04011KT indicates the wind is from 040deg true (north east) at 11 knots (20 kmh 13 mph) In the United
States the wind direction must have a 60deg or greater variance for variable wind direction to be reported
and the wind speed must be greater than 3 knots (56 kmh 35 mph)
bull 12SM indicates the prevailing visibility is 1frasl2 mi (800 m) SM = statute mile
bull VCTS indicates a thunderstorm (TS) in the vicinity (VC) which means from 5ndash10 mi (8ndash16 km)
bull SN indicates snow is falling at a moderate intensity a preceding plus or minus sign (+-) indicates heavy
or light precipitation Without a +- sign moderate precipitation is assumed
bull FZFG indicates the presence of freezing fog
bull BKN003 OVC010 indicates a broken (58 to 78 of the sky covered) cloud layer at 300 ft (91 m) above
ground level (AGL) and an overcast (88 of the sky covered) layer at 1000 ft (300 m)
bull M02M02 indicates the temperature is minus2degC (28degF) and the dewpoint is minus2degC (28degF) An M in
front of the number indicates that the temperaturedew point is minus ie below zero (0) Celsius
bull A3006 indicates the altimeter setting is 3006 inHg (1018 hPa)
bull RMK indicates the remarks section follows
DATA TYPES
bull Aeronautical Information Manual (AIM)
ndash SID and STAR Taxi charts
Aeronautical
Nav Data
SID
STAR
DATA TYPES
bull Airspace rules
ndash Eg seperation
Constraints amp
Rules
DATA TYPES
bull Cost Index
bull Airline (User) preferred routes
ndash User Preferences Model (UPM)
Route Type amp
Optimization
Settings
COST DEFINITION
COST INDEX EXAMPLE
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
INPUTS
bull Initial conditions (IC)
bull Flight Intent (FI)
bull User Preferences Model (UPM)
ndash ie airline policy
bull Operational Context Model (OCM)
ndash rules of airpace including
STARs and SIDs
bull ie ATFM policy
ndash Aircraft Performance Model
(APM)
bull Based on BADA
ndash Weather Model (WM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Flight Intent with User Preferences Model (UPM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull FI with UPM and Operational Context Model (OCM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory with details
DATA TYPES
bull Flight Plan
bull Regulated Flight Plan
bull Actual Flight data (Current Tactical)
bull Correlated Position data
bull CDM related data
Basic Flight
Data amp
Schedule
4D TRAJECTORY DATA PROFILES
LIPEEDFMJMP803JMPD22820110301031200BB9377945220110301031500FPLFPLAFPNEXENEXENNN2011030103150020110301031500TEFINS783849NNN00ACHN
NNN600300N00N0NDCULTNRSNNK00344154791F160N0234019032500LIPELUPOS5N10A443151N0111749EY
032955DCT7518V443121N0110416E32Y 033515DCT15038V443048N0104912E67Y 033640DCT16043V443040N0104526E75Y
033830LUPOSL99516057W443017N0103453EY 034355PARL99516099N444920N0101736EY 034735MISPOL995160127W450126N0100450EY
035305BEKANL995160169W451930N0094540EY 035720TZOL995160202N453333N0093026EY 040450PEPAGN851160260W455902N0090417EY
040730ABESIN851160280W460935N0090234EY 041350PIXOSN851160329W463619N0085859EY 041800SOPERN851160361W465322N0085640EY
042155ELMURN851160391W470924N0085427EY 042350ROLSAN851160406W471723N0085321EY 042705KUDESDCT160431W473115N0085126EN
044840DCT160597V490001N0083550E76N 045435DCT75623V491355N0083323E88N
050205EDFM3650A492821N0083051EN23032500LI040545NAS443151N0111749E460244N0090341E11600267
032500LIMMFIR040545FIR443151N0111749E460244N0090341E11600267 032500LIPECR033115ES443151N0111749E443113N0110030E194023
032500LIPECTR033115AUA443151N0111749E443113N0110030E194023 033115LIPPADS033735ES443113N0110030E443029N0104009E941602350
033115LIPPC1X033735ES443113N0110030E443029N0104009E941602350 033115LIPPCTA033735AUA443113N0110030E443029N0104009E941602350
033735LIMMECTA034805AUA443029N0104009E450310N0100300E16016050131 033735LIMMES1034805ES443029N0104009E450310N0100300E16016050131
033735LIMMES1X034805ES443029N0104009E450310N0100300E16016050131 034635LIMMR60041420ES445759N0100829E463827N0085842E160160119333
034805LIMMACTA040730AUA450310N0100300E460935N0090234E160160131280 034805LIMMADE035640ES450310N0100300E453126N0093244E160160131197
035640LIMMANE040730ES453126N0093244E460935N0090234E160160197280 040545LS042705NAS460244N0090341E473115N0085126E160160267431
040545LSASFIR042705FIR460244N0090341E473115N0085126E160160267431 040730LSAZCTA042705AUA460935N0090234E473115N0085126E160160280431
040730LSAZSSL042420ES460935N0090234E471936N0085303E160160280410 041545LSTSA50P042020CRSA464419N0085754E470300N0085520E160160344379
041545LSTSA52P041620ERSA464419N0085754E464627N0085736E160160344348 041620LSTSA51P042020ERSA464627N0085736E470300N0085520E160160348379
042020LSTSA40P042115ERSA470300N0085520E470644N0085449E160160379386
042420LSAZESL042705ES471936N0085303E473115N0085126E1601604104310344157065F160N02340 F140N023493 F160N023498 F150N0234390
F100N023439778032200LIPELUPOS5N10A443151N0111749EY 032540DCT6014V443128N0110716E25Y 032730DCT6022V443115N0110115E39Y
032800DCT6824V443111N0105944E42Y 032830DCT7027V443106N0105729E47Y 032845DCT7528V443105N0105644E49Y 032855DCT7829V443103N0105558E51Y
032910DCT8030V443102N0105513E53Y 032925DCT8032V443058N0105343E56Y 032955DCT8834V443055N0105212E60Y 033035DCT10037V443050N0104957E65Y
033040DCT10038V443048N0104912E67Y 033050DCT10439V443047N0104826E68Y 033110DCT10640V443045N0104741E70Y 033150DCT10644V443038N0104441E77Y
033155DCT11045V443037N0104355E79Y 033215LUPOSL99511057W443017N0103453EY 033240DCT11071V443638N0102907E33Y
033245DCT11472V443705N0102843E36Y 033310DCT12074V443800N0102753E40Y 033335DCT12078V443948N0102615E50Y 033345DCT12479V444016N0102550E52Y
033410DCT12880V444043N0102525E55Y 033445DCT12883V444205N0102411E62Y 033500DCT13084V444232N0102346E64Y 033515DCT13087V444353N0102232E71Y
033540DCT13789V444448N0102143E76Y 033600DCT14090V444515N0102118E79Y 033620DCT14092V444609N0102029E83Y 033640DCT14493V444637N0102004E86Y
033700DCT14094V444704N0101939E88Y 033740DCT14098V444853N0101801E98Y 033755PARL99514499N444920N0101736EY
034015DCT144120V445825N0100802E75Y 034110MISPOL995145127W450126N0100450EY 034200DCT145134V450427N0100138E17Y
034215DCT150135V450452N0100111E19Y 034250DCT150140V450702N0095854E31Y 034325DCT154142V450753N0095759E36Y
034405DCT160145V450911N0095637E43Y 034425DCT160148V451028N0095515E50Y 034520DCT160155V451329N0095203E67Y
034625DCT160162V451629N0094852E83Y 034720BEKANL995160169W451930N0094540EY 035145TZOL995160202N453333N0093026EY
035700DCT160242V455107N0091224E69Y 035925PEPAGN851160260W455902N0090417EY 040205ABESIN851160280W460935N0090234EY
040715DCT160319V463052N0085943E80Y 040840PIXOSN851160329W463619N0085859EY 041315SOPERN851160361W465322N0085640EY
041720DCT160390V470852N0085431E97Y 041730ELMURN851157391W470924N0085427EY 041755DCT150393V471028N0085418E13Y
041820DCT150397V471236N0085401E40Y 041920DCT150405V471651N0085325E93Y 041935ROLSAN851147406W471723N0085321EY
042000DCT140408V471830N0085312E8Y 042125DCT140419V472436N0085221E52Y 042205DCT140425V472755N0085154E76Y
042225DCT134427V472902N0085144E84Y 042240DCT130428V472935N0085140E88Y 042320KUDESN851121431W473115N0085126EN
042435DCT100437V473343N0085439E21N 042720ROMIRN851100459W474247N0090628EN 042825VEDOKN851100468W474724N0090714EN
042905TINOXDCT100473W475007N0090740EY 044335DCT100571G484048N0084511EY 045005DCT100607V485957N0083916E68Y
045040DCT94609V490101N0083856E72Y 045100DCT94611V490205N0083836E75Y 045140DCT84614V490341N0083807E81Y 045200DCT84616V490445N0083747E85Y
045240DCT74619V490620N0083717E91Y 045345INKAMDCT54624W490900N0083628EY 045655DCT54642V491820N0083258E56Y
045950DCT16656G492536N0083015EY 050110EDFM3661A492821N0083051EY39032200LI040020NAS443151N0111749E460244N0090341E11600267
032200LIMMFIR040020FIR443151N0111749E460244N0090341E11600267 032200LIPECR033020ES443151N0111749E443052N0105042E196036
032200LIPECTR033020AUA443151N0111749E443052N0105042E196036 033020LIPPADS033205ES443052N0105042E443029N0104009E961103650
033020LIPPC1X033205ES443052N0105042E443029N0104009E961103650 033020LIPPCTA033205AUA443052N0105042E443029N0104009E961103650
033205LIMMECTA034140AUA443029N0104009E450310N0100300E11014550131 033205LIMMES1034140ES443029N0104009E450310N0100300E11014550131
4D TRAJECTORY DATA PROFILES
Tactical flight Models
bull FTFM - Filed Tactical Flight Model The FTFM is the
ldquoinitialrdquo profile as it reflects the status of the demand before
activation of the regulation plan It is computed with the latest
flight plan version sent by each AO to the CFMUIFPS
bull RTFM - Regulated Tactical Flight Model The RTFM is the
ldquoregulatedrdquo profile as it reflects the status of the demand after
activation of the regulation plan It is computed with the latest
ATFM slot (CTOT) issued to the AO by the ground
regulation system
bull CTFM - Current Tactical Flight Model The CTFM is the
ldquoactualrdquo profile as it integrates the actual entry time of the
flights in the regulated TV It is computed with the Radar
Data sent by ACCs to CFMUETFMS ref
CPG_GEN - Profiles generated by the CFMU path generation
tool
bull SCR - Shortest Constrained Route
bull SRR - Shortest RAD restriction applied Route
bull SUR - Shortest Unconstrained Route
bull DCT - Direct route
CPF - Correlated Position reports for a Flight CPRs
(Correlated Position Reports) which are surveillance data
collected from the ACCs
Filed Flight Plan
CDM
Header
Point Profile
Airspace Profile
Circle Intersection
Profile
RTFM Profile
CTFM Profile
CFP Profile
FTFM Profile
4D TRAJECTORY DATA PROFILES
Current Tactical Flight Model (CTFM) is computed with Radar Data sent by
Area Control Centers to CFMUETFMS so it can be deemed as a fused
version of FTFM with real data
ENHANCED TACTICAL FLOW MANAGEMENT SYSTEM (ETFMS) EUROCONTROL 2013
DATA TYPES
bull Base of Aircraft Data (BADA) depending on ac type
ndash Nominal control variables (BADA 3)
ndash Full flight variable envelope (BADA 4)
bull optimization
Aircraft
Performance
Data
AIRCRAFT EQUATION OF MOTION
bull equation of motion sufficient in 3 dof
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
number of parameters of the system that may vary independently
BASE OF AIRCRAFT DATA (BADA)
bull There are two families of BADA APM based on the same modelling approach and components [EUROCONTROL]
bull BADA Family 3ndash providing a 90 coverage of the current aircraft types operating
in the ECAC airspace
ndash model aircraft behaviour over the normal operations part of the flight envelope and to meet todays requirements for aircraft performance modelling and simulation
bull BADA Family 4 ndash a newly developed model intended to meet advanced functional
and precision requirements of the new ATM systems
ndash providing a 60 coverage of the current aircraft types operating in ECAC airspace
ndash BADA 4 provides accurate modelling of aircraft over the entire flight envelope and enables modelling and simulation of advanced concepts of future systems
AIRCRAFT PERFORMANCE MODEL
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
BADA AIRCRAFT LIMITATION MODEL
DATA TYPES
bull Business objectives
ndash Cost Index
ndash User Preferences Model (UPM)
ndash Ground delays due to connectionshellip
Business Rules
euro
HORIZONTAL OPTIMISATION
TO_WPT FROM_WPT Cost
A
B
C
DEP
DEP
DEP
21
25
23
A
A
E
B
52
40
CG 45
B
B
E
F
49
53
G
G
F
J
73
79
E
E
K
H
84
75
F
F
H
I
70
67
I
I
L
M
96
85
HL 86
JM 119
KO 117
KL 109
MQ 115
LP 118
QDEST 134
OP 136
PDEST 130
Worklist
Dijkstra algorithm
DEPDEST
16
40
19
12
19
J
28
34
I14
17
O33
25
Q30
P32
F24
28
D
E
19
31
G22
A
B
C
2125
23
H
K
35
26 L
M18
29
1) Selection of segments for current from- waypoint
2) Calculation of costs for selected segments
3) Entering calculated datasets into worklist
4) Selection of best dataset from worklist
5) To- waypoint of best dataset becomes from- waypoint
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
DATA TYPES
bull METARTAF
LTBA 312020Z 05006KT 030V100 CAVOK 1908 Q1018 NOSIG
TAF LTBA 311640Z 31180124 03009KT CAVOK
BECMG 01030106 SCT035
TEMPO 01080112 04015G25KT
BECMG 01140116 CAVOK
Weather
Data
METAR EXPLAINED
KTTN 051853Z 04011KT 12SM VCTS SN FZFG BKN003 OVC010 M02M02 A3006 RMK AO2 TSB40
SLP176 P0002 T10171017
bull KTTN is the ICAO identifier for the Trenton-Mercer Airport
bull 051853Z indicates the day of the month is the 5th and the time of day is 1853 ZuluUTC 653PM GMT
or 153PM Eastern Standard Time
bull 04011KT indicates the wind is from 040deg true (north east) at 11 knots (20 kmh 13 mph) In the United
States the wind direction must have a 60deg or greater variance for variable wind direction to be reported
and the wind speed must be greater than 3 knots (56 kmh 35 mph)
bull 12SM indicates the prevailing visibility is 1frasl2 mi (800 m) SM = statute mile
bull VCTS indicates a thunderstorm (TS) in the vicinity (VC) which means from 5ndash10 mi (8ndash16 km)
bull SN indicates snow is falling at a moderate intensity a preceding plus or minus sign (+-) indicates heavy
or light precipitation Without a +- sign moderate precipitation is assumed
bull FZFG indicates the presence of freezing fog
bull BKN003 OVC010 indicates a broken (58 to 78 of the sky covered) cloud layer at 300 ft (91 m) above
ground level (AGL) and an overcast (88 of the sky covered) layer at 1000 ft (300 m)
bull M02M02 indicates the temperature is minus2degC (28degF) and the dewpoint is minus2degC (28degF) An M in
front of the number indicates that the temperaturedew point is minus ie below zero (0) Celsius
bull A3006 indicates the altimeter setting is 3006 inHg (1018 hPa)
bull RMK indicates the remarks section follows
DATA TYPES
bull Aeronautical Information Manual (AIM)
ndash SID and STAR Taxi charts
Aeronautical
Nav Data
SID
STAR
DATA TYPES
bull Airspace rules
ndash Eg seperation
Constraints amp
Rules
DATA TYPES
bull Cost Index
bull Airline (User) preferred routes
ndash User Preferences Model (UPM)
Route Type amp
Optimization
Settings
COST DEFINITION
COST INDEX EXAMPLE
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
INPUTS
bull Initial conditions (IC)
bull Flight Intent (FI)
bull User Preferences Model (UPM)
ndash ie airline policy
bull Operational Context Model (OCM)
ndash rules of airpace including
STARs and SIDs
bull ie ATFM policy
ndash Aircraft Performance Model
(APM)
bull Based on BADA
ndash Weather Model (WM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Flight Intent with User Preferences Model (UPM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull FI with UPM and Operational Context Model (OCM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory with details
DATA TYPES
bull Flight Plan
bull Regulated Flight Plan
bull Actual Flight data (Current Tactical)
bull Correlated Position data
bull CDM related data
Basic Flight
Data amp
Schedule
4D TRAJECTORY DATA PROFILES
LIPEEDFMJMP803JMPD22820110301031200BB9377945220110301031500FPLFPLAFPNEXENEXENNN2011030103150020110301031500TEFINS783849NNN00ACHN
NNN600300N00N0NDCULTNRSNNK00344154791F160N0234019032500LIPELUPOS5N10A443151N0111749EY
032955DCT7518V443121N0110416E32Y 033515DCT15038V443048N0104912E67Y 033640DCT16043V443040N0104526E75Y
033830LUPOSL99516057W443017N0103453EY 034355PARL99516099N444920N0101736EY 034735MISPOL995160127W450126N0100450EY
035305BEKANL995160169W451930N0094540EY 035720TZOL995160202N453333N0093026EY 040450PEPAGN851160260W455902N0090417EY
040730ABESIN851160280W460935N0090234EY 041350PIXOSN851160329W463619N0085859EY 041800SOPERN851160361W465322N0085640EY
042155ELMURN851160391W470924N0085427EY 042350ROLSAN851160406W471723N0085321EY 042705KUDESDCT160431W473115N0085126EN
044840DCT160597V490001N0083550E76N 045435DCT75623V491355N0083323E88N
050205EDFM3650A492821N0083051EN23032500LI040545NAS443151N0111749E460244N0090341E11600267
032500LIMMFIR040545FIR443151N0111749E460244N0090341E11600267 032500LIPECR033115ES443151N0111749E443113N0110030E194023
032500LIPECTR033115AUA443151N0111749E443113N0110030E194023 033115LIPPADS033735ES443113N0110030E443029N0104009E941602350
033115LIPPC1X033735ES443113N0110030E443029N0104009E941602350 033115LIPPCTA033735AUA443113N0110030E443029N0104009E941602350
033735LIMMECTA034805AUA443029N0104009E450310N0100300E16016050131 033735LIMMES1034805ES443029N0104009E450310N0100300E16016050131
033735LIMMES1X034805ES443029N0104009E450310N0100300E16016050131 034635LIMMR60041420ES445759N0100829E463827N0085842E160160119333
034805LIMMACTA040730AUA450310N0100300E460935N0090234E160160131280 034805LIMMADE035640ES450310N0100300E453126N0093244E160160131197
035640LIMMANE040730ES453126N0093244E460935N0090234E160160197280 040545LS042705NAS460244N0090341E473115N0085126E160160267431
040545LSASFIR042705FIR460244N0090341E473115N0085126E160160267431 040730LSAZCTA042705AUA460935N0090234E473115N0085126E160160280431
040730LSAZSSL042420ES460935N0090234E471936N0085303E160160280410 041545LSTSA50P042020CRSA464419N0085754E470300N0085520E160160344379
041545LSTSA52P041620ERSA464419N0085754E464627N0085736E160160344348 041620LSTSA51P042020ERSA464627N0085736E470300N0085520E160160348379
042020LSTSA40P042115ERSA470300N0085520E470644N0085449E160160379386
042420LSAZESL042705ES471936N0085303E473115N0085126E1601604104310344157065F160N02340 F140N023493 F160N023498 F150N0234390
F100N023439778032200LIPELUPOS5N10A443151N0111749EY 032540DCT6014V443128N0110716E25Y 032730DCT6022V443115N0110115E39Y
032800DCT6824V443111N0105944E42Y 032830DCT7027V443106N0105729E47Y 032845DCT7528V443105N0105644E49Y 032855DCT7829V443103N0105558E51Y
032910DCT8030V443102N0105513E53Y 032925DCT8032V443058N0105343E56Y 032955DCT8834V443055N0105212E60Y 033035DCT10037V443050N0104957E65Y
033040DCT10038V443048N0104912E67Y 033050DCT10439V443047N0104826E68Y 033110DCT10640V443045N0104741E70Y 033150DCT10644V443038N0104441E77Y
033155DCT11045V443037N0104355E79Y 033215LUPOSL99511057W443017N0103453EY 033240DCT11071V443638N0102907E33Y
033245DCT11472V443705N0102843E36Y 033310DCT12074V443800N0102753E40Y 033335DCT12078V443948N0102615E50Y 033345DCT12479V444016N0102550E52Y
033410DCT12880V444043N0102525E55Y 033445DCT12883V444205N0102411E62Y 033500DCT13084V444232N0102346E64Y 033515DCT13087V444353N0102232E71Y
033540DCT13789V444448N0102143E76Y 033600DCT14090V444515N0102118E79Y 033620DCT14092V444609N0102029E83Y 033640DCT14493V444637N0102004E86Y
033700DCT14094V444704N0101939E88Y 033740DCT14098V444853N0101801E98Y 033755PARL99514499N444920N0101736EY
034015DCT144120V445825N0100802E75Y 034110MISPOL995145127W450126N0100450EY 034200DCT145134V450427N0100138E17Y
034215DCT150135V450452N0100111E19Y 034250DCT150140V450702N0095854E31Y 034325DCT154142V450753N0095759E36Y
034405DCT160145V450911N0095637E43Y 034425DCT160148V451028N0095515E50Y 034520DCT160155V451329N0095203E67Y
034625DCT160162V451629N0094852E83Y 034720BEKANL995160169W451930N0094540EY 035145TZOL995160202N453333N0093026EY
035700DCT160242V455107N0091224E69Y 035925PEPAGN851160260W455902N0090417EY 040205ABESIN851160280W460935N0090234EY
040715DCT160319V463052N0085943E80Y 040840PIXOSN851160329W463619N0085859EY 041315SOPERN851160361W465322N0085640EY
041720DCT160390V470852N0085431E97Y 041730ELMURN851157391W470924N0085427EY 041755DCT150393V471028N0085418E13Y
041820DCT150397V471236N0085401E40Y 041920DCT150405V471651N0085325E93Y 041935ROLSAN851147406W471723N0085321EY
042000DCT140408V471830N0085312E8Y 042125DCT140419V472436N0085221E52Y 042205DCT140425V472755N0085154E76Y
042225DCT134427V472902N0085144E84Y 042240DCT130428V472935N0085140E88Y 042320KUDESN851121431W473115N0085126EN
042435DCT100437V473343N0085439E21N 042720ROMIRN851100459W474247N0090628EN 042825VEDOKN851100468W474724N0090714EN
042905TINOXDCT100473W475007N0090740EY 044335DCT100571G484048N0084511EY 045005DCT100607V485957N0083916E68Y
045040DCT94609V490101N0083856E72Y 045100DCT94611V490205N0083836E75Y 045140DCT84614V490341N0083807E81Y 045200DCT84616V490445N0083747E85Y
045240DCT74619V490620N0083717E91Y 045345INKAMDCT54624W490900N0083628EY 045655DCT54642V491820N0083258E56Y
045950DCT16656G492536N0083015EY 050110EDFM3661A492821N0083051EY39032200LI040020NAS443151N0111749E460244N0090341E11600267
032200LIMMFIR040020FIR443151N0111749E460244N0090341E11600267 032200LIPECR033020ES443151N0111749E443052N0105042E196036
032200LIPECTR033020AUA443151N0111749E443052N0105042E196036 033020LIPPADS033205ES443052N0105042E443029N0104009E961103650
033020LIPPC1X033205ES443052N0105042E443029N0104009E961103650 033020LIPPCTA033205AUA443052N0105042E443029N0104009E961103650
033205LIMMECTA034140AUA443029N0104009E450310N0100300E11014550131 033205LIMMES1034140ES443029N0104009E450310N0100300E11014550131
4D TRAJECTORY DATA PROFILES
Tactical flight Models
bull FTFM - Filed Tactical Flight Model The FTFM is the
ldquoinitialrdquo profile as it reflects the status of the demand before
activation of the regulation plan It is computed with the latest
flight plan version sent by each AO to the CFMUIFPS
bull RTFM - Regulated Tactical Flight Model The RTFM is the
ldquoregulatedrdquo profile as it reflects the status of the demand after
activation of the regulation plan It is computed with the latest
ATFM slot (CTOT) issued to the AO by the ground
regulation system
bull CTFM - Current Tactical Flight Model The CTFM is the
ldquoactualrdquo profile as it integrates the actual entry time of the
flights in the regulated TV It is computed with the Radar
Data sent by ACCs to CFMUETFMS ref
CPG_GEN - Profiles generated by the CFMU path generation
tool
bull SCR - Shortest Constrained Route
bull SRR - Shortest RAD restriction applied Route
bull SUR - Shortest Unconstrained Route
bull DCT - Direct route
CPF - Correlated Position reports for a Flight CPRs
(Correlated Position Reports) which are surveillance data
collected from the ACCs
Filed Flight Plan
CDM
Header
Point Profile
Airspace Profile
Circle Intersection
Profile
RTFM Profile
CTFM Profile
CFP Profile
FTFM Profile
4D TRAJECTORY DATA PROFILES
Current Tactical Flight Model (CTFM) is computed with Radar Data sent by
Area Control Centers to CFMUETFMS so it can be deemed as a fused
version of FTFM with real data
ENHANCED TACTICAL FLOW MANAGEMENT SYSTEM (ETFMS) EUROCONTROL 2013
DATA TYPES
bull Base of Aircraft Data (BADA) depending on ac type
ndash Nominal control variables (BADA 3)
ndash Full flight variable envelope (BADA 4)
bull optimization
Aircraft
Performance
Data
AIRCRAFT EQUATION OF MOTION
bull equation of motion sufficient in 3 dof
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
number of parameters of the system that may vary independently
BASE OF AIRCRAFT DATA (BADA)
bull There are two families of BADA APM based on the same modelling approach and components [EUROCONTROL]
bull BADA Family 3ndash providing a 90 coverage of the current aircraft types operating
in the ECAC airspace
ndash model aircraft behaviour over the normal operations part of the flight envelope and to meet todays requirements for aircraft performance modelling and simulation
bull BADA Family 4 ndash a newly developed model intended to meet advanced functional
and precision requirements of the new ATM systems
ndash providing a 60 coverage of the current aircraft types operating in ECAC airspace
ndash BADA 4 provides accurate modelling of aircraft over the entire flight envelope and enables modelling and simulation of advanced concepts of future systems
AIRCRAFT PERFORMANCE MODEL
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
BADA AIRCRAFT LIMITATION MODEL
DATA TYPES
bull Business objectives
ndash Cost Index
ndash User Preferences Model (UPM)
ndash Ground delays due to connectionshellip
Business Rules
euro
HORIZONTAL OPTIMISATION
TO_WPT FROM_WPT Cost
A
B
C
DEP
DEP
DEP
21
25
23
A
A
E
B
52
40
CG 45
B
B
E
F
49
53
G
G
F
J
73
79
E
E
K
H
84
75
F
F
H
I
70
67
I
I
L
M
96
85
HL 86
JM 119
KO 117
KL 109
MQ 115
LP 118
QDEST 134
OP 136
PDEST 130
Worklist
Dijkstra algorithm
DEPDEST
16
40
19
12
19
J
28
34
I14
17
O33
25
Q30
P32
F24
28
D
E
19
31
G22
A
B
C
2125
23
H
K
35
26 L
M18
29
1) Selection of segments for current from- waypoint
2) Calculation of costs for selected segments
3) Entering calculated datasets into worklist
4) Selection of best dataset from worklist
5) To- waypoint of best dataset becomes from- waypoint
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS

METAR EXPLAINED
KTTN 051853Z 04011KT 12SM VCTS SN FZFG BKN003 OVC010 M02M02 A3006 RMK AO2 TSB40
SLP176 P0002 T10171017
bull KTTN is the ICAO identifier for the Trenton-Mercer Airport
bull 051853Z indicates the day of the month is the 5th and the time of day is 1853 ZuluUTC 653PM GMT
or 153PM Eastern Standard Time
bull 04011KT indicates the wind is from 040deg true (north east) at 11 knots (20 kmh 13 mph) In the United
States the wind direction must have a 60deg or greater variance for variable wind direction to be reported
and the wind speed must be greater than 3 knots (56 kmh 35 mph)
bull 12SM indicates the prevailing visibility is 1frasl2 mi (800 m) SM = statute mile
bull VCTS indicates a thunderstorm (TS) in the vicinity (VC) which means from 5ndash10 mi (8ndash16 km)
bull SN indicates snow is falling at a moderate intensity a preceding plus or minus sign (+-) indicates heavy
or light precipitation Without a +- sign moderate precipitation is assumed
bull FZFG indicates the presence of freezing fog
bull BKN003 OVC010 indicates a broken (58 to 78 of the sky covered) cloud layer at 300 ft (91 m) above
ground level (AGL) and an overcast (88 of the sky covered) layer at 1000 ft (300 m)
bull M02M02 indicates the temperature is minus2degC (28degF) and the dewpoint is minus2degC (28degF) An M in
front of the number indicates that the temperaturedew point is minus ie below zero (0) Celsius
bull A3006 indicates the altimeter setting is 3006 inHg (1018 hPa)
bull RMK indicates the remarks section follows
DATA TYPES
bull Aeronautical Information Manual (AIM)
ndash SID and STAR Taxi charts
Aeronautical
Nav Data
SID
STAR
DATA TYPES
bull Airspace rules
ndash Eg seperation
Constraints amp
Rules
DATA TYPES
bull Cost Index
bull Airline (User) preferred routes
ndash User Preferences Model (UPM)
Route Type amp
Optimization
Settings
COST DEFINITION
COST INDEX EXAMPLE
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
INPUTS
bull Initial conditions (IC)
bull Flight Intent (FI)
bull User Preferences Model (UPM)
ndash ie airline policy
bull Operational Context Model (OCM)
ndash rules of airpace including
STARs and SIDs
bull ie ATFM policy
ndash Aircraft Performance Model
(APM)
bull Based on BADA
ndash Weather Model (WM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Flight Intent with User Preferences Model (UPM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull FI with UPM and Operational Context Model (OCM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory with details
DATA TYPES
bull Flight Plan
bull Regulated Flight Plan
bull Actual Flight data (Current Tactical)
bull Correlated Position data
bull CDM related data
Basic Flight
Data amp
Schedule
4D TRAJECTORY DATA PROFILES
LIPEEDFMJMP803JMPD22820110301031200BB9377945220110301031500FPLFPLAFPNEXENEXENNN2011030103150020110301031500TEFINS783849NNN00ACHN
NNN600300N00N0NDCULTNRSNNK00344154791F160N0234019032500LIPELUPOS5N10A443151N0111749EY
032955DCT7518V443121N0110416E32Y 033515DCT15038V443048N0104912E67Y 033640DCT16043V443040N0104526E75Y
033830LUPOSL99516057W443017N0103453EY 034355PARL99516099N444920N0101736EY 034735MISPOL995160127W450126N0100450EY
035305BEKANL995160169W451930N0094540EY 035720TZOL995160202N453333N0093026EY 040450PEPAGN851160260W455902N0090417EY
040730ABESIN851160280W460935N0090234EY 041350PIXOSN851160329W463619N0085859EY 041800SOPERN851160361W465322N0085640EY
042155ELMURN851160391W470924N0085427EY 042350ROLSAN851160406W471723N0085321EY 042705KUDESDCT160431W473115N0085126EN
044840DCT160597V490001N0083550E76N 045435DCT75623V491355N0083323E88N
050205EDFM3650A492821N0083051EN23032500LI040545NAS443151N0111749E460244N0090341E11600267
032500LIMMFIR040545FIR443151N0111749E460244N0090341E11600267 032500LIPECR033115ES443151N0111749E443113N0110030E194023
032500LIPECTR033115AUA443151N0111749E443113N0110030E194023 033115LIPPADS033735ES443113N0110030E443029N0104009E941602350
033115LIPPC1X033735ES443113N0110030E443029N0104009E941602350 033115LIPPCTA033735AUA443113N0110030E443029N0104009E941602350
033735LIMMECTA034805AUA443029N0104009E450310N0100300E16016050131 033735LIMMES1034805ES443029N0104009E450310N0100300E16016050131
033735LIMMES1X034805ES443029N0104009E450310N0100300E16016050131 034635LIMMR60041420ES445759N0100829E463827N0085842E160160119333
034805LIMMACTA040730AUA450310N0100300E460935N0090234E160160131280 034805LIMMADE035640ES450310N0100300E453126N0093244E160160131197
035640LIMMANE040730ES453126N0093244E460935N0090234E160160197280 040545LS042705NAS460244N0090341E473115N0085126E160160267431
040545LSASFIR042705FIR460244N0090341E473115N0085126E160160267431 040730LSAZCTA042705AUA460935N0090234E473115N0085126E160160280431
040730LSAZSSL042420ES460935N0090234E471936N0085303E160160280410 041545LSTSA50P042020CRSA464419N0085754E470300N0085520E160160344379
041545LSTSA52P041620ERSA464419N0085754E464627N0085736E160160344348 041620LSTSA51P042020ERSA464627N0085736E470300N0085520E160160348379
042020LSTSA40P042115ERSA470300N0085520E470644N0085449E160160379386
042420LSAZESL042705ES471936N0085303E473115N0085126E1601604104310344157065F160N02340 F140N023493 F160N023498 F150N0234390
F100N023439778032200LIPELUPOS5N10A443151N0111749EY 032540DCT6014V443128N0110716E25Y 032730DCT6022V443115N0110115E39Y
032800DCT6824V443111N0105944E42Y 032830DCT7027V443106N0105729E47Y 032845DCT7528V443105N0105644E49Y 032855DCT7829V443103N0105558E51Y
032910DCT8030V443102N0105513E53Y 032925DCT8032V443058N0105343E56Y 032955DCT8834V443055N0105212E60Y 033035DCT10037V443050N0104957E65Y
033040DCT10038V443048N0104912E67Y 033050DCT10439V443047N0104826E68Y 033110DCT10640V443045N0104741E70Y 033150DCT10644V443038N0104441E77Y
033155DCT11045V443037N0104355E79Y 033215LUPOSL99511057W443017N0103453EY 033240DCT11071V443638N0102907E33Y
033245DCT11472V443705N0102843E36Y 033310DCT12074V443800N0102753E40Y 033335DCT12078V443948N0102615E50Y 033345DCT12479V444016N0102550E52Y
033410DCT12880V444043N0102525E55Y 033445DCT12883V444205N0102411E62Y 033500DCT13084V444232N0102346E64Y 033515DCT13087V444353N0102232E71Y
033540DCT13789V444448N0102143E76Y 033600DCT14090V444515N0102118E79Y 033620DCT14092V444609N0102029E83Y 033640DCT14493V444637N0102004E86Y
033700DCT14094V444704N0101939E88Y 033740DCT14098V444853N0101801E98Y 033755PARL99514499N444920N0101736EY
034015DCT144120V445825N0100802E75Y 034110MISPOL995145127W450126N0100450EY 034200DCT145134V450427N0100138E17Y
034215DCT150135V450452N0100111E19Y 034250DCT150140V450702N0095854E31Y 034325DCT154142V450753N0095759E36Y
034405DCT160145V450911N0095637E43Y 034425DCT160148V451028N0095515E50Y 034520DCT160155V451329N0095203E67Y
034625DCT160162V451629N0094852E83Y 034720BEKANL995160169W451930N0094540EY 035145TZOL995160202N453333N0093026EY
035700DCT160242V455107N0091224E69Y 035925PEPAGN851160260W455902N0090417EY 040205ABESIN851160280W460935N0090234EY
040715DCT160319V463052N0085943E80Y 040840PIXOSN851160329W463619N0085859EY 041315SOPERN851160361W465322N0085640EY
041720DCT160390V470852N0085431E97Y 041730ELMURN851157391W470924N0085427EY 041755DCT150393V471028N0085418E13Y
041820DCT150397V471236N0085401E40Y 041920DCT150405V471651N0085325E93Y 041935ROLSAN851147406W471723N0085321EY
042000DCT140408V471830N0085312E8Y 042125DCT140419V472436N0085221E52Y 042205DCT140425V472755N0085154E76Y
042225DCT134427V472902N0085144E84Y 042240DCT130428V472935N0085140E88Y 042320KUDESN851121431W473115N0085126EN
042435DCT100437V473343N0085439E21N 042720ROMIRN851100459W474247N0090628EN 042825VEDOKN851100468W474724N0090714EN
042905TINOXDCT100473W475007N0090740EY 044335DCT100571G484048N0084511EY 045005DCT100607V485957N0083916E68Y
045040DCT94609V490101N0083856E72Y 045100DCT94611V490205N0083836E75Y 045140DCT84614V490341N0083807E81Y 045200DCT84616V490445N0083747E85Y
045240DCT74619V490620N0083717E91Y 045345INKAMDCT54624W490900N0083628EY 045655DCT54642V491820N0083258E56Y
045950DCT16656G492536N0083015EY 050110EDFM3661A492821N0083051EY39032200LI040020NAS443151N0111749E460244N0090341E11600267
032200LIMMFIR040020FIR443151N0111749E460244N0090341E11600267 032200LIPECR033020ES443151N0111749E443052N0105042E196036
032200LIPECTR033020AUA443151N0111749E443052N0105042E196036 033020LIPPADS033205ES443052N0105042E443029N0104009E961103650
033020LIPPC1X033205ES443052N0105042E443029N0104009E961103650 033020LIPPCTA033205AUA443052N0105042E443029N0104009E961103650
033205LIMMECTA034140AUA443029N0104009E450310N0100300E11014550131 033205LIMMES1034140ES443029N0104009E450310N0100300E11014550131
4D TRAJECTORY DATA PROFILES
Tactical flight Models
bull FTFM - Filed Tactical Flight Model The FTFM is the
ldquoinitialrdquo profile as it reflects the status of the demand before
activation of the regulation plan It is computed with the latest
flight plan version sent by each AO to the CFMUIFPS
bull RTFM - Regulated Tactical Flight Model The RTFM is the
ldquoregulatedrdquo profile as it reflects the status of the demand after
activation of the regulation plan It is computed with the latest
ATFM slot (CTOT) issued to the AO by the ground
regulation system
bull CTFM - Current Tactical Flight Model The CTFM is the
ldquoactualrdquo profile as it integrates the actual entry time of the
flights in the regulated TV It is computed with the Radar
Data sent by ACCs to CFMUETFMS ref
CPG_GEN - Profiles generated by the CFMU path generation
tool
bull SCR - Shortest Constrained Route
bull SRR - Shortest RAD restriction applied Route
bull SUR - Shortest Unconstrained Route
bull DCT - Direct route
CPF - Correlated Position reports for a Flight CPRs
(Correlated Position Reports) which are surveillance data
collected from the ACCs
Filed Flight Plan
CDM
Header
Point Profile
Airspace Profile
Circle Intersection
Profile
RTFM Profile
CTFM Profile
CFP Profile
FTFM Profile
4D TRAJECTORY DATA PROFILES
Current Tactical Flight Model (CTFM) is computed with Radar Data sent by
Area Control Centers to CFMUETFMS so it can be deemed as a fused
version of FTFM with real data
ENHANCED TACTICAL FLOW MANAGEMENT SYSTEM (ETFMS) EUROCONTROL 2013
DATA TYPES
bull Base of Aircraft Data (BADA) depending on ac type
ndash Nominal control variables (BADA 3)
ndash Full flight variable envelope (BADA 4)
bull optimization
Aircraft
Performance
Data
AIRCRAFT EQUATION OF MOTION
bull equation of motion sufficient in 3 dof
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
number of parameters of the system that may vary independently
BASE OF AIRCRAFT DATA (BADA)
bull There are two families of BADA APM based on the same modelling approach and components [EUROCONTROL]
bull BADA Family 3ndash providing a 90 coverage of the current aircraft types operating
in the ECAC airspace
ndash model aircraft behaviour over the normal operations part of the flight envelope and to meet todays requirements for aircraft performance modelling and simulation
bull BADA Family 4 ndash a newly developed model intended to meet advanced functional
and precision requirements of the new ATM systems
ndash providing a 60 coverage of the current aircraft types operating in ECAC airspace
ndash BADA 4 provides accurate modelling of aircraft over the entire flight envelope and enables modelling and simulation of advanced concepts of future systems
AIRCRAFT PERFORMANCE MODEL
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
BADA AIRCRAFT LIMITATION MODEL
DATA TYPES
bull Business objectives
ndash Cost Index
ndash User Preferences Model (UPM)
ndash Ground delays due to connectionshellip
Business Rules
euro
HORIZONTAL OPTIMISATION
TO_WPT FROM_WPT Cost
A
B
C
DEP
DEP
DEP
21
25
23
A
A
E
B
52
40
CG 45
B
B
E
F
49
53
G
G
F
J
73
79
E
E
K
H
84
75
F
F
H
I
70
67
I
I
L
M
96
85
HL 86
JM 119
KO 117
KL 109
MQ 115
LP 118
QDEST 134
OP 136
PDEST 130
Worklist
Dijkstra algorithm
DEPDEST
16
40
19
12
19
J
28
34
I14
17
O33
25
Q30
P32
F24
28
D
E
19
31
G22
A
B
C
2125
23
H
K
35
26 L
M18
29
1) Selection of segments for current from- waypoint
2) Calculation of costs for selected segments
3) Entering calculated datasets into worklist
4) Selection of best dataset from worklist
5) To- waypoint of best dataset becomes from- waypoint
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
DATA TYPES
bull Aeronautical Information Manual (AIM)
ndash SID and STAR Taxi charts
Aeronautical
Nav Data
SID
STAR
DATA TYPES
bull Airspace rules
ndash Eg seperation
Constraints amp
Rules
DATA TYPES
bull Cost Index
bull Airline (User) preferred routes
ndash User Preferences Model (UPM)
Route Type amp
Optimization
Settings
COST DEFINITION
COST INDEX EXAMPLE
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
INPUTS
bull Initial conditions (IC)
bull Flight Intent (FI)
bull User Preferences Model (UPM)
ndash ie airline policy
bull Operational Context Model (OCM)
ndash rules of airpace including
STARs and SIDs
bull ie ATFM policy
ndash Aircraft Performance Model
(APM)
bull Based on BADA
ndash Weather Model (WM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Flight Intent with User Preferences Model (UPM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull FI with UPM and Operational Context Model (OCM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory with details
DATA TYPES
bull Flight Plan
bull Regulated Flight Plan
bull Actual Flight data (Current Tactical)
bull Correlated Position data
bull CDM related data
Basic Flight
Data amp
Schedule
4D TRAJECTORY DATA PROFILES
LIPEEDFMJMP803JMPD22820110301031200BB9377945220110301031500FPLFPLAFPNEXENEXENNN2011030103150020110301031500TEFINS783849NNN00ACHN
NNN600300N00N0NDCULTNRSNNK00344154791F160N0234019032500LIPELUPOS5N10A443151N0111749EY
032955DCT7518V443121N0110416E32Y 033515DCT15038V443048N0104912E67Y 033640DCT16043V443040N0104526E75Y
033830LUPOSL99516057W443017N0103453EY 034355PARL99516099N444920N0101736EY 034735MISPOL995160127W450126N0100450EY
035305BEKANL995160169W451930N0094540EY 035720TZOL995160202N453333N0093026EY 040450PEPAGN851160260W455902N0090417EY
040730ABESIN851160280W460935N0090234EY 041350PIXOSN851160329W463619N0085859EY 041800SOPERN851160361W465322N0085640EY
042155ELMURN851160391W470924N0085427EY 042350ROLSAN851160406W471723N0085321EY 042705KUDESDCT160431W473115N0085126EN
044840DCT160597V490001N0083550E76N 045435DCT75623V491355N0083323E88N
050205EDFM3650A492821N0083051EN23032500LI040545NAS443151N0111749E460244N0090341E11600267
032500LIMMFIR040545FIR443151N0111749E460244N0090341E11600267 032500LIPECR033115ES443151N0111749E443113N0110030E194023
032500LIPECTR033115AUA443151N0111749E443113N0110030E194023 033115LIPPADS033735ES443113N0110030E443029N0104009E941602350
033115LIPPC1X033735ES443113N0110030E443029N0104009E941602350 033115LIPPCTA033735AUA443113N0110030E443029N0104009E941602350
033735LIMMECTA034805AUA443029N0104009E450310N0100300E16016050131 033735LIMMES1034805ES443029N0104009E450310N0100300E16016050131
033735LIMMES1X034805ES443029N0104009E450310N0100300E16016050131 034635LIMMR60041420ES445759N0100829E463827N0085842E160160119333
034805LIMMACTA040730AUA450310N0100300E460935N0090234E160160131280 034805LIMMADE035640ES450310N0100300E453126N0093244E160160131197
035640LIMMANE040730ES453126N0093244E460935N0090234E160160197280 040545LS042705NAS460244N0090341E473115N0085126E160160267431
040545LSASFIR042705FIR460244N0090341E473115N0085126E160160267431 040730LSAZCTA042705AUA460935N0090234E473115N0085126E160160280431
040730LSAZSSL042420ES460935N0090234E471936N0085303E160160280410 041545LSTSA50P042020CRSA464419N0085754E470300N0085520E160160344379
041545LSTSA52P041620ERSA464419N0085754E464627N0085736E160160344348 041620LSTSA51P042020ERSA464627N0085736E470300N0085520E160160348379
042020LSTSA40P042115ERSA470300N0085520E470644N0085449E160160379386
042420LSAZESL042705ES471936N0085303E473115N0085126E1601604104310344157065F160N02340 F140N023493 F160N023498 F150N0234390
F100N023439778032200LIPELUPOS5N10A443151N0111749EY 032540DCT6014V443128N0110716E25Y 032730DCT6022V443115N0110115E39Y
032800DCT6824V443111N0105944E42Y 032830DCT7027V443106N0105729E47Y 032845DCT7528V443105N0105644E49Y 032855DCT7829V443103N0105558E51Y
032910DCT8030V443102N0105513E53Y 032925DCT8032V443058N0105343E56Y 032955DCT8834V443055N0105212E60Y 033035DCT10037V443050N0104957E65Y
033040DCT10038V443048N0104912E67Y 033050DCT10439V443047N0104826E68Y 033110DCT10640V443045N0104741E70Y 033150DCT10644V443038N0104441E77Y
033155DCT11045V443037N0104355E79Y 033215LUPOSL99511057W443017N0103453EY 033240DCT11071V443638N0102907E33Y
033245DCT11472V443705N0102843E36Y 033310DCT12074V443800N0102753E40Y 033335DCT12078V443948N0102615E50Y 033345DCT12479V444016N0102550E52Y
033410DCT12880V444043N0102525E55Y 033445DCT12883V444205N0102411E62Y 033500DCT13084V444232N0102346E64Y 033515DCT13087V444353N0102232E71Y
033540DCT13789V444448N0102143E76Y 033600DCT14090V444515N0102118E79Y 033620DCT14092V444609N0102029E83Y 033640DCT14493V444637N0102004E86Y
033700DCT14094V444704N0101939E88Y 033740DCT14098V444853N0101801E98Y 033755PARL99514499N444920N0101736EY
034015DCT144120V445825N0100802E75Y 034110MISPOL995145127W450126N0100450EY 034200DCT145134V450427N0100138E17Y
034215DCT150135V450452N0100111E19Y 034250DCT150140V450702N0095854E31Y 034325DCT154142V450753N0095759E36Y
034405DCT160145V450911N0095637E43Y 034425DCT160148V451028N0095515E50Y 034520DCT160155V451329N0095203E67Y
034625DCT160162V451629N0094852E83Y 034720BEKANL995160169W451930N0094540EY 035145TZOL995160202N453333N0093026EY
035700DCT160242V455107N0091224E69Y 035925PEPAGN851160260W455902N0090417EY 040205ABESIN851160280W460935N0090234EY
040715DCT160319V463052N0085943E80Y 040840PIXOSN851160329W463619N0085859EY 041315SOPERN851160361W465322N0085640EY
041720DCT160390V470852N0085431E97Y 041730ELMURN851157391W470924N0085427EY 041755DCT150393V471028N0085418E13Y
041820DCT150397V471236N0085401E40Y 041920DCT150405V471651N0085325E93Y 041935ROLSAN851147406W471723N0085321EY
042000DCT140408V471830N0085312E8Y 042125DCT140419V472436N0085221E52Y 042205DCT140425V472755N0085154E76Y
042225DCT134427V472902N0085144E84Y 042240DCT130428V472935N0085140E88Y 042320KUDESN851121431W473115N0085126EN
042435DCT100437V473343N0085439E21N 042720ROMIRN851100459W474247N0090628EN 042825VEDOKN851100468W474724N0090714EN
042905TINOXDCT100473W475007N0090740EY 044335DCT100571G484048N0084511EY 045005DCT100607V485957N0083916E68Y
045040DCT94609V490101N0083856E72Y 045100DCT94611V490205N0083836E75Y 045140DCT84614V490341N0083807E81Y 045200DCT84616V490445N0083747E85Y
045240DCT74619V490620N0083717E91Y 045345INKAMDCT54624W490900N0083628EY 045655DCT54642V491820N0083258E56Y
045950DCT16656G492536N0083015EY 050110EDFM3661A492821N0083051EY39032200LI040020NAS443151N0111749E460244N0090341E11600267
032200LIMMFIR040020FIR443151N0111749E460244N0090341E11600267 032200LIPECR033020ES443151N0111749E443052N0105042E196036
032200LIPECTR033020AUA443151N0111749E443052N0105042E196036 033020LIPPADS033205ES443052N0105042E443029N0104009E961103650
033020LIPPC1X033205ES443052N0105042E443029N0104009E961103650 033020LIPPCTA033205AUA443052N0105042E443029N0104009E961103650
033205LIMMECTA034140AUA443029N0104009E450310N0100300E11014550131 033205LIMMES1034140ES443029N0104009E450310N0100300E11014550131
4D TRAJECTORY DATA PROFILES
Tactical flight Models
bull FTFM - Filed Tactical Flight Model The FTFM is the
ldquoinitialrdquo profile as it reflects the status of the demand before
activation of the regulation plan It is computed with the latest
flight plan version sent by each AO to the CFMUIFPS
bull RTFM - Regulated Tactical Flight Model The RTFM is the
ldquoregulatedrdquo profile as it reflects the status of the demand after
activation of the regulation plan It is computed with the latest
ATFM slot (CTOT) issued to the AO by the ground
regulation system
bull CTFM - Current Tactical Flight Model The CTFM is the
ldquoactualrdquo profile as it integrates the actual entry time of the
flights in the regulated TV It is computed with the Radar
Data sent by ACCs to CFMUETFMS ref
CPG_GEN - Profiles generated by the CFMU path generation
tool
bull SCR - Shortest Constrained Route
bull SRR - Shortest RAD restriction applied Route
bull SUR - Shortest Unconstrained Route
bull DCT - Direct route
CPF - Correlated Position reports for a Flight CPRs
(Correlated Position Reports) which are surveillance data
collected from the ACCs
Filed Flight Plan
CDM
Header
Point Profile
Airspace Profile
Circle Intersection
Profile
RTFM Profile
CTFM Profile
CFP Profile
FTFM Profile
4D TRAJECTORY DATA PROFILES
Current Tactical Flight Model (CTFM) is computed with Radar Data sent by
Area Control Centers to CFMUETFMS so it can be deemed as a fused
version of FTFM with real data
ENHANCED TACTICAL FLOW MANAGEMENT SYSTEM (ETFMS) EUROCONTROL 2013
DATA TYPES
bull Base of Aircraft Data (BADA) depending on ac type
ndash Nominal control variables (BADA 3)
ndash Full flight variable envelope (BADA 4)
bull optimization
Aircraft
Performance
Data
AIRCRAFT EQUATION OF MOTION
bull equation of motion sufficient in 3 dof
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
number of parameters of the system that may vary independently
BASE OF AIRCRAFT DATA (BADA)
bull There are two families of BADA APM based on the same modelling approach and components [EUROCONTROL]
bull BADA Family 3ndash providing a 90 coverage of the current aircraft types operating
in the ECAC airspace
ndash model aircraft behaviour over the normal operations part of the flight envelope and to meet todays requirements for aircraft performance modelling and simulation
bull BADA Family 4 ndash a newly developed model intended to meet advanced functional
and precision requirements of the new ATM systems
ndash providing a 60 coverage of the current aircraft types operating in ECAC airspace
ndash BADA 4 provides accurate modelling of aircraft over the entire flight envelope and enables modelling and simulation of advanced concepts of future systems
AIRCRAFT PERFORMANCE MODEL
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
BADA AIRCRAFT LIMITATION MODEL
DATA TYPES
bull Business objectives
ndash Cost Index
ndash User Preferences Model (UPM)
ndash Ground delays due to connectionshellip
Business Rules
euro
HORIZONTAL OPTIMISATION
TO_WPT FROM_WPT Cost
A
B
C
DEP
DEP
DEP
21
25
23
A
A
E
B
52
40
CG 45
B
B
E
F
49
53
G
G
F
J
73
79
E
E
K
H
84
75
F
F
H
I
70
67
I
I
L
M
96
85
HL 86
JM 119
KO 117
KL 109
MQ 115
LP 118
QDEST 134
OP 136
PDEST 130
Worklist
Dijkstra algorithm
DEPDEST
16
40
19
12
19
J
28
34
I14
17
O33
25
Q30
P32
F24
28
D
E
19
31
G22
A
B
C
2125
23
H
K
35
26 L
M18
29
1) Selection of segments for current from- waypoint
2) Calculation of costs for selected segments
3) Entering calculated datasets into worklist
4) Selection of best dataset from worklist
5) To- waypoint of best dataset becomes from- waypoint
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
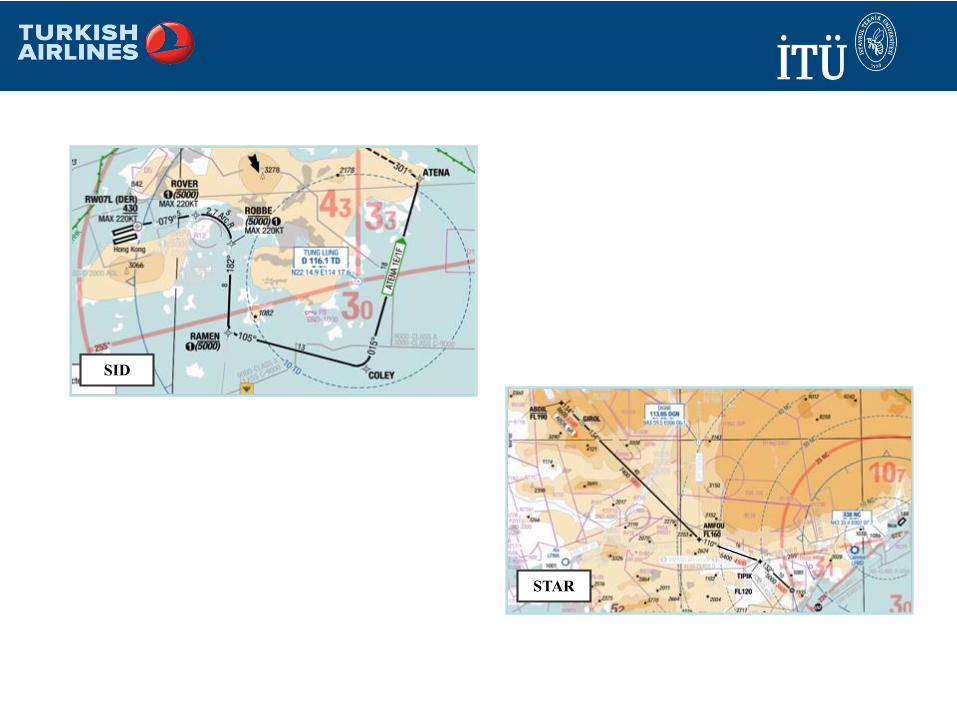
SID
STAR
DATA TYPES
bull Airspace rules
ndash Eg seperation
Constraints amp
Rules
DATA TYPES
bull Cost Index
bull Airline (User) preferred routes
ndash User Preferences Model (UPM)
Route Type amp
Optimization
Settings
COST DEFINITION
COST INDEX EXAMPLE
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
INPUTS
bull Initial conditions (IC)
bull Flight Intent (FI)
bull User Preferences Model (UPM)
ndash ie airline policy
bull Operational Context Model (OCM)
ndash rules of airpace including
STARs and SIDs
bull ie ATFM policy
ndash Aircraft Performance Model
(APM)
bull Based on BADA
ndash Weather Model (WM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Flight Intent with User Preferences Model (UPM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull FI with UPM and Operational Context Model (OCM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory with details
DATA TYPES
bull Flight Plan
bull Regulated Flight Plan
bull Actual Flight data (Current Tactical)
bull Correlated Position data
bull CDM related data
Basic Flight
Data amp
Schedule
4D TRAJECTORY DATA PROFILES
LIPEEDFMJMP803JMPD22820110301031200BB9377945220110301031500FPLFPLAFPNEXENEXENNN2011030103150020110301031500TEFINS783849NNN00ACHN
NNN600300N00N0NDCULTNRSNNK00344154791F160N0234019032500LIPELUPOS5N10A443151N0111749EY
032955DCT7518V443121N0110416E32Y 033515DCT15038V443048N0104912E67Y 033640DCT16043V443040N0104526E75Y
033830LUPOSL99516057W443017N0103453EY 034355PARL99516099N444920N0101736EY 034735MISPOL995160127W450126N0100450EY
035305BEKANL995160169W451930N0094540EY 035720TZOL995160202N453333N0093026EY 040450PEPAGN851160260W455902N0090417EY
040730ABESIN851160280W460935N0090234EY 041350PIXOSN851160329W463619N0085859EY 041800SOPERN851160361W465322N0085640EY
042155ELMURN851160391W470924N0085427EY 042350ROLSAN851160406W471723N0085321EY 042705KUDESDCT160431W473115N0085126EN
044840DCT160597V490001N0083550E76N 045435DCT75623V491355N0083323E88N
050205EDFM3650A492821N0083051EN23032500LI040545NAS443151N0111749E460244N0090341E11600267
032500LIMMFIR040545FIR443151N0111749E460244N0090341E11600267 032500LIPECR033115ES443151N0111749E443113N0110030E194023
032500LIPECTR033115AUA443151N0111749E443113N0110030E194023 033115LIPPADS033735ES443113N0110030E443029N0104009E941602350
033115LIPPC1X033735ES443113N0110030E443029N0104009E941602350 033115LIPPCTA033735AUA443113N0110030E443029N0104009E941602350
033735LIMMECTA034805AUA443029N0104009E450310N0100300E16016050131 033735LIMMES1034805ES443029N0104009E450310N0100300E16016050131
033735LIMMES1X034805ES443029N0104009E450310N0100300E16016050131 034635LIMMR60041420ES445759N0100829E463827N0085842E160160119333
034805LIMMACTA040730AUA450310N0100300E460935N0090234E160160131280 034805LIMMADE035640ES450310N0100300E453126N0093244E160160131197
035640LIMMANE040730ES453126N0093244E460935N0090234E160160197280 040545LS042705NAS460244N0090341E473115N0085126E160160267431
040545LSASFIR042705FIR460244N0090341E473115N0085126E160160267431 040730LSAZCTA042705AUA460935N0090234E473115N0085126E160160280431
040730LSAZSSL042420ES460935N0090234E471936N0085303E160160280410 041545LSTSA50P042020CRSA464419N0085754E470300N0085520E160160344379
041545LSTSA52P041620ERSA464419N0085754E464627N0085736E160160344348 041620LSTSA51P042020ERSA464627N0085736E470300N0085520E160160348379
042020LSTSA40P042115ERSA470300N0085520E470644N0085449E160160379386
042420LSAZESL042705ES471936N0085303E473115N0085126E1601604104310344157065F160N02340 F140N023493 F160N023498 F150N0234390
F100N023439778032200LIPELUPOS5N10A443151N0111749EY 032540DCT6014V443128N0110716E25Y 032730DCT6022V443115N0110115E39Y
032800DCT6824V443111N0105944E42Y 032830DCT7027V443106N0105729E47Y 032845DCT7528V443105N0105644E49Y 032855DCT7829V443103N0105558E51Y
032910DCT8030V443102N0105513E53Y 032925DCT8032V443058N0105343E56Y 032955DCT8834V443055N0105212E60Y 033035DCT10037V443050N0104957E65Y
033040DCT10038V443048N0104912E67Y 033050DCT10439V443047N0104826E68Y 033110DCT10640V443045N0104741E70Y 033150DCT10644V443038N0104441E77Y
033155DCT11045V443037N0104355E79Y 033215LUPOSL99511057W443017N0103453EY 033240DCT11071V443638N0102907E33Y
033245DCT11472V443705N0102843E36Y 033310DCT12074V443800N0102753E40Y 033335DCT12078V443948N0102615E50Y 033345DCT12479V444016N0102550E52Y
033410DCT12880V444043N0102525E55Y 033445DCT12883V444205N0102411E62Y 033500DCT13084V444232N0102346E64Y 033515DCT13087V444353N0102232E71Y
033540DCT13789V444448N0102143E76Y 033600DCT14090V444515N0102118E79Y 033620DCT14092V444609N0102029E83Y 033640DCT14493V444637N0102004E86Y
033700DCT14094V444704N0101939E88Y 033740DCT14098V444853N0101801E98Y 033755PARL99514499N444920N0101736EY
034015DCT144120V445825N0100802E75Y 034110MISPOL995145127W450126N0100450EY 034200DCT145134V450427N0100138E17Y
034215DCT150135V450452N0100111E19Y 034250DCT150140V450702N0095854E31Y 034325DCT154142V450753N0095759E36Y
034405DCT160145V450911N0095637E43Y 034425DCT160148V451028N0095515E50Y 034520DCT160155V451329N0095203E67Y
034625DCT160162V451629N0094852E83Y 034720BEKANL995160169W451930N0094540EY 035145TZOL995160202N453333N0093026EY
035700DCT160242V455107N0091224E69Y 035925PEPAGN851160260W455902N0090417EY 040205ABESIN851160280W460935N0090234EY
040715DCT160319V463052N0085943E80Y 040840PIXOSN851160329W463619N0085859EY 041315SOPERN851160361W465322N0085640EY
041720DCT160390V470852N0085431E97Y 041730ELMURN851157391W470924N0085427EY 041755DCT150393V471028N0085418E13Y
041820DCT150397V471236N0085401E40Y 041920DCT150405V471651N0085325E93Y 041935ROLSAN851147406W471723N0085321EY
042000DCT140408V471830N0085312E8Y 042125DCT140419V472436N0085221E52Y 042205DCT140425V472755N0085154E76Y
042225DCT134427V472902N0085144E84Y 042240DCT130428V472935N0085140E88Y 042320KUDESN851121431W473115N0085126EN
042435DCT100437V473343N0085439E21N 042720ROMIRN851100459W474247N0090628EN 042825VEDOKN851100468W474724N0090714EN
042905TINOXDCT100473W475007N0090740EY 044335DCT100571G484048N0084511EY 045005DCT100607V485957N0083916E68Y
045040DCT94609V490101N0083856E72Y 045100DCT94611V490205N0083836E75Y 045140DCT84614V490341N0083807E81Y 045200DCT84616V490445N0083747E85Y
045240DCT74619V490620N0083717E91Y 045345INKAMDCT54624W490900N0083628EY 045655DCT54642V491820N0083258E56Y
045950DCT16656G492536N0083015EY 050110EDFM3661A492821N0083051EY39032200LI040020NAS443151N0111749E460244N0090341E11600267
032200LIMMFIR040020FIR443151N0111749E460244N0090341E11600267 032200LIPECR033020ES443151N0111749E443052N0105042E196036
032200LIPECTR033020AUA443151N0111749E443052N0105042E196036 033020LIPPADS033205ES443052N0105042E443029N0104009E961103650
033020LIPPC1X033205ES443052N0105042E443029N0104009E961103650 033020LIPPCTA033205AUA443052N0105042E443029N0104009E961103650
033205LIMMECTA034140AUA443029N0104009E450310N0100300E11014550131 033205LIMMES1034140ES443029N0104009E450310N0100300E11014550131
4D TRAJECTORY DATA PROFILES
Tactical flight Models
bull FTFM - Filed Tactical Flight Model The FTFM is the
ldquoinitialrdquo profile as it reflects the status of the demand before
activation of the regulation plan It is computed with the latest
flight plan version sent by each AO to the CFMUIFPS
bull RTFM - Regulated Tactical Flight Model The RTFM is the
ldquoregulatedrdquo profile as it reflects the status of the demand after
activation of the regulation plan It is computed with the latest
ATFM slot (CTOT) issued to the AO by the ground
regulation system
bull CTFM - Current Tactical Flight Model The CTFM is the
ldquoactualrdquo profile as it integrates the actual entry time of the
flights in the regulated TV It is computed with the Radar
Data sent by ACCs to CFMUETFMS ref
CPG_GEN - Profiles generated by the CFMU path generation
tool
bull SCR - Shortest Constrained Route
bull SRR - Shortest RAD restriction applied Route
bull SUR - Shortest Unconstrained Route
bull DCT - Direct route
CPF - Correlated Position reports for a Flight CPRs
(Correlated Position Reports) which are surveillance data
collected from the ACCs
Filed Flight Plan
CDM
Header
Point Profile
Airspace Profile
Circle Intersection
Profile
RTFM Profile
CTFM Profile
CFP Profile
FTFM Profile
4D TRAJECTORY DATA PROFILES
Current Tactical Flight Model (CTFM) is computed with Radar Data sent by
Area Control Centers to CFMUETFMS so it can be deemed as a fused
version of FTFM with real data
ENHANCED TACTICAL FLOW MANAGEMENT SYSTEM (ETFMS) EUROCONTROL 2013
DATA TYPES
bull Base of Aircraft Data (BADA) depending on ac type
ndash Nominal control variables (BADA 3)
ndash Full flight variable envelope (BADA 4)
bull optimization
Aircraft
Performance
Data
AIRCRAFT EQUATION OF MOTION
bull equation of motion sufficient in 3 dof
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
number of parameters of the system that may vary independently
BASE OF AIRCRAFT DATA (BADA)
bull There are two families of BADA APM based on the same modelling approach and components [EUROCONTROL]
bull BADA Family 3ndash providing a 90 coverage of the current aircraft types operating
in the ECAC airspace
ndash model aircraft behaviour over the normal operations part of the flight envelope and to meet todays requirements for aircraft performance modelling and simulation
bull BADA Family 4 ndash a newly developed model intended to meet advanced functional
and precision requirements of the new ATM systems
ndash providing a 60 coverage of the current aircraft types operating in ECAC airspace
ndash BADA 4 provides accurate modelling of aircraft over the entire flight envelope and enables modelling and simulation of advanced concepts of future systems
AIRCRAFT PERFORMANCE MODEL
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
BADA AIRCRAFT LIMITATION MODEL
DATA TYPES
bull Business objectives
ndash Cost Index
ndash User Preferences Model (UPM)
ndash Ground delays due to connectionshellip
Business Rules
euro
HORIZONTAL OPTIMISATION
TO_WPT FROM_WPT Cost
A
B
C
DEP
DEP
DEP
21
25
23
A
A
E
B
52
40
CG 45
B
B
E
F
49
53
G
G
F
J
73
79
E
E
K
H
84
75
F
F
H
I
70
67
I
I
L
M
96
85
HL 86
JM 119
KO 117
KL 109
MQ 115
LP 118
QDEST 134
OP 136
PDEST 130
Worklist
Dijkstra algorithm
DEPDEST
16
40
19
12
19
J
28
34
I14
17
O33
25
Q30
P32
F24
28
D
E
19
31
G22
A
B
C
2125
23
H
K
35
26 L
M18
29
1) Selection of segments for current from- waypoint
2) Calculation of costs for selected segments
3) Entering calculated datasets into worklist
4) Selection of best dataset from worklist
5) To- waypoint of best dataset becomes from- waypoint
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
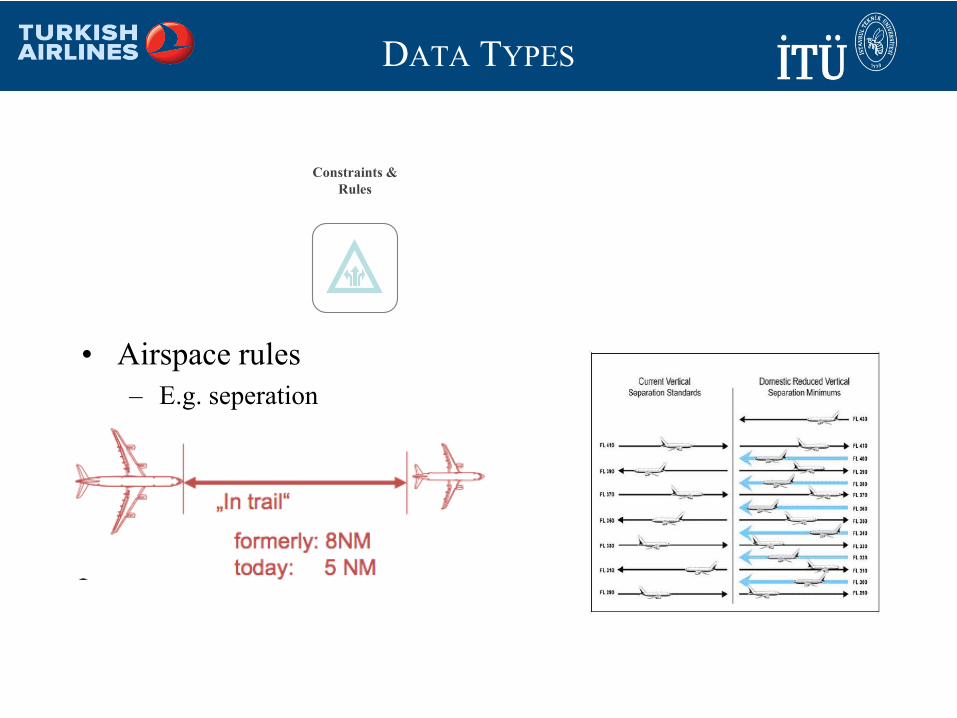
DATA TYPES
bull Airspace rules
ndash Eg seperation
Constraints amp
Rules
DATA TYPES
bull Cost Index
bull Airline (User) preferred routes
ndash User Preferences Model (UPM)
Route Type amp
Optimization
Settings
COST DEFINITION
COST INDEX EXAMPLE
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
INPUTS
bull Initial conditions (IC)
bull Flight Intent (FI)
bull User Preferences Model (UPM)
ndash ie airline policy
bull Operational Context Model (OCM)
ndash rules of airpace including
STARs and SIDs
bull ie ATFM policy
ndash Aircraft Performance Model
(APM)
bull Based on BADA
ndash Weather Model (WM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Flight Intent with User Preferences Model (UPM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull FI with UPM and Operational Context Model (OCM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory with details
DATA TYPES
bull Flight Plan
bull Regulated Flight Plan
bull Actual Flight data (Current Tactical)
bull Correlated Position data
bull CDM related data
Basic Flight
Data amp
Schedule
4D TRAJECTORY DATA PROFILES
LIPEEDFMJMP803JMPD22820110301031200BB9377945220110301031500FPLFPLAFPNEXENEXENNN2011030103150020110301031500TEFINS783849NNN00ACHN
NNN600300N00N0NDCULTNRSNNK00344154791F160N0234019032500LIPELUPOS5N10A443151N0111749EY
032955DCT7518V443121N0110416E32Y 033515DCT15038V443048N0104912E67Y 033640DCT16043V443040N0104526E75Y
033830LUPOSL99516057W443017N0103453EY 034355PARL99516099N444920N0101736EY 034735MISPOL995160127W450126N0100450EY
035305BEKANL995160169W451930N0094540EY 035720TZOL995160202N453333N0093026EY 040450PEPAGN851160260W455902N0090417EY
040730ABESIN851160280W460935N0090234EY 041350PIXOSN851160329W463619N0085859EY 041800SOPERN851160361W465322N0085640EY
042155ELMURN851160391W470924N0085427EY 042350ROLSAN851160406W471723N0085321EY 042705KUDESDCT160431W473115N0085126EN
044840DCT160597V490001N0083550E76N 045435DCT75623V491355N0083323E88N
050205EDFM3650A492821N0083051EN23032500LI040545NAS443151N0111749E460244N0090341E11600267
032500LIMMFIR040545FIR443151N0111749E460244N0090341E11600267 032500LIPECR033115ES443151N0111749E443113N0110030E194023
032500LIPECTR033115AUA443151N0111749E443113N0110030E194023 033115LIPPADS033735ES443113N0110030E443029N0104009E941602350
033115LIPPC1X033735ES443113N0110030E443029N0104009E941602350 033115LIPPCTA033735AUA443113N0110030E443029N0104009E941602350
033735LIMMECTA034805AUA443029N0104009E450310N0100300E16016050131 033735LIMMES1034805ES443029N0104009E450310N0100300E16016050131
033735LIMMES1X034805ES443029N0104009E450310N0100300E16016050131 034635LIMMR60041420ES445759N0100829E463827N0085842E160160119333
034805LIMMACTA040730AUA450310N0100300E460935N0090234E160160131280 034805LIMMADE035640ES450310N0100300E453126N0093244E160160131197
035640LIMMANE040730ES453126N0093244E460935N0090234E160160197280 040545LS042705NAS460244N0090341E473115N0085126E160160267431
040545LSASFIR042705FIR460244N0090341E473115N0085126E160160267431 040730LSAZCTA042705AUA460935N0090234E473115N0085126E160160280431
040730LSAZSSL042420ES460935N0090234E471936N0085303E160160280410 041545LSTSA50P042020CRSA464419N0085754E470300N0085520E160160344379
041545LSTSA52P041620ERSA464419N0085754E464627N0085736E160160344348 041620LSTSA51P042020ERSA464627N0085736E470300N0085520E160160348379
042020LSTSA40P042115ERSA470300N0085520E470644N0085449E160160379386
042420LSAZESL042705ES471936N0085303E473115N0085126E1601604104310344157065F160N02340 F140N023493 F160N023498 F150N0234390
F100N023439778032200LIPELUPOS5N10A443151N0111749EY 032540DCT6014V443128N0110716E25Y 032730DCT6022V443115N0110115E39Y
032800DCT6824V443111N0105944E42Y 032830DCT7027V443106N0105729E47Y 032845DCT7528V443105N0105644E49Y 032855DCT7829V443103N0105558E51Y
032910DCT8030V443102N0105513E53Y 032925DCT8032V443058N0105343E56Y 032955DCT8834V443055N0105212E60Y 033035DCT10037V443050N0104957E65Y
033040DCT10038V443048N0104912E67Y 033050DCT10439V443047N0104826E68Y 033110DCT10640V443045N0104741E70Y 033150DCT10644V443038N0104441E77Y
033155DCT11045V443037N0104355E79Y 033215LUPOSL99511057W443017N0103453EY 033240DCT11071V443638N0102907E33Y
033245DCT11472V443705N0102843E36Y 033310DCT12074V443800N0102753E40Y 033335DCT12078V443948N0102615E50Y 033345DCT12479V444016N0102550E52Y
033410DCT12880V444043N0102525E55Y 033445DCT12883V444205N0102411E62Y 033500DCT13084V444232N0102346E64Y 033515DCT13087V444353N0102232E71Y
033540DCT13789V444448N0102143E76Y 033600DCT14090V444515N0102118E79Y 033620DCT14092V444609N0102029E83Y 033640DCT14493V444637N0102004E86Y
033700DCT14094V444704N0101939E88Y 033740DCT14098V444853N0101801E98Y 033755PARL99514499N444920N0101736EY
034015DCT144120V445825N0100802E75Y 034110MISPOL995145127W450126N0100450EY 034200DCT145134V450427N0100138E17Y
034215DCT150135V450452N0100111E19Y 034250DCT150140V450702N0095854E31Y 034325DCT154142V450753N0095759E36Y
034405DCT160145V450911N0095637E43Y 034425DCT160148V451028N0095515E50Y 034520DCT160155V451329N0095203E67Y
034625DCT160162V451629N0094852E83Y 034720BEKANL995160169W451930N0094540EY 035145TZOL995160202N453333N0093026EY
035700DCT160242V455107N0091224E69Y 035925PEPAGN851160260W455902N0090417EY 040205ABESIN851160280W460935N0090234EY
040715DCT160319V463052N0085943E80Y 040840PIXOSN851160329W463619N0085859EY 041315SOPERN851160361W465322N0085640EY
041720DCT160390V470852N0085431E97Y 041730ELMURN851157391W470924N0085427EY 041755DCT150393V471028N0085418E13Y
041820DCT150397V471236N0085401E40Y 041920DCT150405V471651N0085325E93Y 041935ROLSAN851147406W471723N0085321EY
042000DCT140408V471830N0085312E8Y 042125DCT140419V472436N0085221E52Y 042205DCT140425V472755N0085154E76Y
042225DCT134427V472902N0085144E84Y 042240DCT130428V472935N0085140E88Y 042320KUDESN851121431W473115N0085126EN
042435DCT100437V473343N0085439E21N 042720ROMIRN851100459W474247N0090628EN 042825VEDOKN851100468W474724N0090714EN
042905TINOXDCT100473W475007N0090740EY 044335DCT100571G484048N0084511EY 045005DCT100607V485957N0083916E68Y
045040DCT94609V490101N0083856E72Y 045100DCT94611V490205N0083836E75Y 045140DCT84614V490341N0083807E81Y 045200DCT84616V490445N0083747E85Y
045240DCT74619V490620N0083717E91Y 045345INKAMDCT54624W490900N0083628EY 045655DCT54642V491820N0083258E56Y
045950DCT16656G492536N0083015EY 050110EDFM3661A492821N0083051EY39032200LI040020NAS443151N0111749E460244N0090341E11600267
032200LIMMFIR040020FIR443151N0111749E460244N0090341E11600267 032200LIPECR033020ES443151N0111749E443052N0105042E196036
032200LIPECTR033020AUA443151N0111749E443052N0105042E196036 033020LIPPADS033205ES443052N0105042E443029N0104009E961103650
033020LIPPC1X033205ES443052N0105042E443029N0104009E961103650 033020LIPPCTA033205AUA443052N0105042E443029N0104009E961103650
033205LIMMECTA034140AUA443029N0104009E450310N0100300E11014550131 033205LIMMES1034140ES443029N0104009E450310N0100300E11014550131
4D TRAJECTORY DATA PROFILES
Tactical flight Models
bull FTFM - Filed Tactical Flight Model The FTFM is the
ldquoinitialrdquo profile as it reflects the status of the demand before
activation of the regulation plan It is computed with the latest
flight plan version sent by each AO to the CFMUIFPS
bull RTFM - Regulated Tactical Flight Model The RTFM is the
ldquoregulatedrdquo profile as it reflects the status of the demand after
activation of the regulation plan It is computed with the latest
ATFM slot (CTOT) issued to the AO by the ground
regulation system
bull CTFM - Current Tactical Flight Model The CTFM is the
ldquoactualrdquo profile as it integrates the actual entry time of the
flights in the regulated TV It is computed with the Radar
Data sent by ACCs to CFMUETFMS ref
CPG_GEN - Profiles generated by the CFMU path generation
tool
bull SCR - Shortest Constrained Route
bull SRR - Shortest RAD restriction applied Route
bull SUR - Shortest Unconstrained Route
bull DCT - Direct route
CPF - Correlated Position reports for a Flight CPRs
(Correlated Position Reports) which are surveillance data
collected from the ACCs
Filed Flight Plan
CDM
Header
Point Profile
Airspace Profile
Circle Intersection
Profile
RTFM Profile
CTFM Profile
CFP Profile
FTFM Profile
4D TRAJECTORY DATA PROFILES
Current Tactical Flight Model (CTFM) is computed with Radar Data sent by
Area Control Centers to CFMUETFMS so it can be deemed as a fused
version of FTFM with real data
ENHANCED TACTICAL FLOW MANAGEMENT SYSTEM (ETFMS) EUROCONTROL 2013
DATA TYPES
bull Base of Aircraft Data (BADA) depending on ac type
ndash Nominal control variables (BADA 3)
ndash Full flight variable envelope (BADA 4)
bull optimization
Aircraft
Performance
Data
AIRCRAFT EQUATION OF MOTION
bull equation of motion sufficient in 3 dof
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
number of parameters of the system that may vary independently
BASE OF AIRCRAFT DATA (BADA)
bull There are two families of BADA APM based on the same modelling approach and components [EUROCONTROL]
bull BADA Family 3ndash providing a 90 coverage of the current aircraft types operating
in the ECAC airspace
ndash model aircraft behaviour over the normal operations part of the flight envelope and to meet todays requirements for aircraft performance modelling and simulation
bull BADA Family 4 ndash a newly developed model intended to meet advanced functional
and precision requirements of the new ATM systems
ndash providing a 60 coverage of the current aircraft types operating in ECAC airspace
ndash BADA 4 provides accurate modelling of aircraft over the entire flight envelope and enables modelling and simulation of advanced concepts of future systems
AIRCRAFT PERFORMANCE MODEL
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
BADA AIRCRAFT LIMITATION MODEL
DATA TYPES
bull Business objectives
ndash Cost Index
ndash User Preferences Model (UPM)
ndash Ground delays due to connectionshellip
Business Rules
euro
HORIZONTAL OPTIMISATION
TO_WPT FROM_WPT Cost
A
B
C
DEP
DEP
DEP
21
25
23
A
A
E
B
52
40
CG 45
B
B
E
F
49
53
G
G
F
J
73
79
E
E
K
H
84
75
F
F
H
I
70
67
I
I
L
M
96
85
HL 86
JM 119
KO 117
KL 109
MQ 115
LP 118
QDEST 134
OP 136
PDEST 130
Worklist
Dijkstra algorithm
DEPDEST
16
40
19
12
19
J
28
34
I14
17
O33
25
Q30
P32
F24
28
D
E
19
31
G22
A
B
C
2125
23
H
K
35
26 L
M18
29
1) Selection of segments for current from- waypoint
2) Calculation of costs for selected segments
3) Entering calculated datasets into worklist
4) Selection of best dataset from worklist
5) To- waypoint of best dataset becomes from- waypoint
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS

DATA TYPES
bull Cost Index
bull Airline (User) preferred routes
ndash User Preferences Model (UPM)
Route Type amp
Optimization
Settings
COST DEFINITION
COST INDEX EXAMPLE
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
INPUTS
bull Initial conditions (IC)
bull Flight Intent (FI)
bull User Preferences Model (UPM)
ndash ie airline policy
bull Operational Context Model (OCM)
ndash rules of airpace including
STARs and SIDs
bull ie ATFM policy
ndash Aircraft Performance Model
(APM)
bull Based on BADA
ndash Weather Model (WM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Flight Intent with User Preferences Model (UPM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull FI with UPM and Operational Context Model (OCM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory with details
DATA TYPES
bull Flight Plan
bull Regulated Flight Plan
bull Actual Flight data (Current Tactical)
bull Correlated Position data
bull CDM related data
Basic Flight
Data amp
Schedule
4D TRAJECTORY DATA PROFILES
LIPEEDFMJMP803JMPD22820110301031200BB9377945220110301031500FPLFPLAFPNEXENEXENNN2011030103150020110301031500TEFINS783849NNN00ACHN
NNN600300N00N0NDCULTNRSNNK00344154791F160N0234019032500LIPELUPOS5N10A443151N0111749EY
032955DCT7518V443121N0110416E32Y 033515DCT15038V443048N0104912E67Y 033640DCT16043V443040N0104526E75Y
033830LUPOSL99516057W443017N0103453EY 034355PARL99516099N444920N0101736EY 034735MISPOL995160127W450126N0100450EY
035305BEKANL995160169W451930N0094540EY 035720TZOL995160202N453333N0093026EY 040450PEPAGN851160260W455902N0090417EY
040730ABESIN851160280W460935N0090234EY 041350PIXOSN851160329W463619N0085859EY 041800SOPERN851160361W465322N0085640EY
042155ELMURN851160391W470924N0085427EY 042350ROLSAN851160406W471723N0085321EY 042705KUDESDCT160431W473115N0085126EN
044840DCT160597V490001N0083550E76N 045435DCT75623V491355N0083323E88N
050205EDFM3650A492821N0083051EN23032500LI040545NAS443151N0111749E460244N0090341E11600267
032500LIMMFIR040545FIR443151N0111749E460244N0090341E11600267 032500LIPECR033115ES443151N0111749E443113N0110030E194023
032500LIPECTR033115AUA443151N0111749E443113N0110030E194023 033115LIPPADS033735ES443113N0110030E443029N0104009E941602350
033115LIPPC1X033735ES443113N0110030E443029N0104009E941602350 033115LIPPCTA033735AUA443113N0110030E443029N0104009E941602350
033735LIMMECTA034805AUA443029N0104009E450310N0100300E16016050131 033735LIMMES1034805ES443029N0104009E450310N0100300E16016050131
033735LIMMES1X034805ES443029N0104009E450310N0100300E16016050131 034635LIMMR60041420ES445759N0100829E463827N0085842E160160119333
034805LIMMACTA040730AUA450310N0100300E460935N0090234E160160131280 034805LIMMADE035640ES450310N0100300E453126N0093244E160160131197
035640LIMMANE040730ES453126N0093244E460935N0090234E160160197280 040545LS042705NAS460244N0090341E473115N0085126E160160267431
040545LSASFIR042705FIR460244N0090341E473115N0085126E160160267431 040730LSAZCTA042705AUA460935N0090234E473115N0085126E160160280431
040730LSAZSSL042420ES460935N0090234E471936N0085303E160160280410 041545LSTSA50P042020CRSA464419N0085754E470300N0085520E160160344379
041545LSTSA52P041620ERSA464419N0085754E464627N0085736E160160344348 041620LSTSA51P042020ERSA464627N0085736E470300N0085520E160160348379
042020LSTSA40P042115ERSA470300N0085520E470644N0085449E160160379386
042420LSAZESL042705ES471936N0085303E473115N0085126E1601604104310344157065F160N02340 F140N023493 F160N023498 F150N0234390
F100N023439778032200LIPELUPOS5N10A443151N0111749EY 032540DCT6014V443128N0110716E25Y 032730DCT6022V443115N0110115E39Y
032800DCT6824V443111N0105944E42Y 032830DCT7027V443106N0105729E47Y 032845DCT7528V443105N0105644E49Y 032855DCT7829V443103N0105558E51Y
032910DCT8030V443102N0105513E53Y 032925DCT8032V443058N0105343E56Y 032955DCT8834V443055N0105212E60Y 033035DCT10037V443050N0104957E65Y
033040DCT10038V443048N0104912E67Y 033050DCT10439V443047N0104826E68Y 033110DCT10640V443045N0104741E70Y 033150DCT10644V443038N0104441E77Y
033155DCT11045V443037N0104355E79Y 033215LUPOSL99511057W443017N0103453EY 033240DCT11071V443638N0102907E33Y
033245DCT11472V443705N0102843E36Y 033310DCT12074V443800N0102753E40Y 033335DCT12078V443948N0102615E50Y 033345DCT12479V444016N0102550E52Y
033410DCT12880V444043N0102525E55Y 033445DCT12883V444205N0102411E62Y 033500DCT13084V444232N0102346E64Y 033515DCT13087V444353N0102232E71Y
033540DCT13789V444448N0102143E76Y 033600DCT14090V444515N0102118E79Y 033620DCT14092V444609N0102029E83Y 033640DCT14493V444637N0102004E86Y
033700DCT14094V444704N0101939E88Y 033740DCT14098V444853N0101801E98Y 033755PARL99514499N444920N0101736EY
034015DCT144120V445825N0100802E75Y 034110MISPOL995145127W450126N0100450EY 034200DCT145134V450427N0100138E17Y
034215DCT150135V450452N0100111E19Y 034250DCT150140V450702N0095854E31Y 034325DCT154142V450753N0095759E36Y
034405DCT160145V450911N0095637E43Y 034425DCT160148V451028N0095515E50Y 034520DCT160155V451329N0095203E67Y
034625DCT160162V451629N0094852E83Y 034720BEKANL995160169W451930N0094540EY 035145TZOL995160202N453333N0093026EY
035700DCT160242V455107N0091224E69Y 035925PEPAGN851160260W455902N0090417EY 040205ABESIN851160280W460935N0090234EY
040715DCT160319V463052N0085943E80Y 040840PIXOSN851160329W463619N0085859EY 041315SOPERN851160361W465322N0085640EY
041720DCT160390V470852N0085431E97Y 041730ELMURN851157391W470924N0085427EY 041755DCT150393V471028N0085418E13Y
041820DCT150397V471236N0085401E40Y 041920DCT150405V471651N0085325E93Y 041935ROLSAN851147406W471723N0085321EY
042000DCT140408V471830N0085312E8Y 042125DCT140419V472436N0085221E52Y 042205DCT140425V472755N0085154E76Y
042225DCT134427V472902N0085144E84Y 042240DCT130428V472935N0085140E88Y 042320KUDESN851121431W473115N0085126EN
042435DCT100437V473343N0085439E21N 042720ROMIRN851100459W474247N0090628EN 042825VEDOKN851100468W474724N0090714EN
042905TINOXDCT100473W475007N0090740EY 044335DCT100571G484048N0084511EY 045005DCT100607V485957N0083916E68Y
045040DCT94609V490101N0083856E72Y 045100DCT94611V490205N0083836E75Y 045140DCT84614V490341N0083807E81Y 045200DCT84616V490445N0083747E85Y
045240DCT74619V490620N0083717E91Y 045345INKAMDCT54624W490900N0083628EY 045655DCT54642V491820N0083258E56Y
045950DCT16656G492536N0083015EY 050110EDFM3661A492821N0083051EY39032200LI040020NAS443151N0111749E460244N0090341E11600267
032200LIMMFIR040020FIR443151N0111749E460244N0090341E11600267 032200LIPECR033020ES443151N0111749E443052N0105042E196036
032200LIPECTR033020AUA443151N0111749E443052N0105042E196036 033020LIPPADS033205ES443052N0105042E443029N0104009E961103650
033020LIPPC1X033205ES443052N0105042E443029N0104009E961103650 033020LIPPCTA033205AUA443052N0105042E443029N0104009E961103650
033205LIMMECTA034140AUA443029N0104009E450310N0100300E11014550131 033205LIMMES1034140ES443029N0104009E450310N0100300E11014550131
4D TRAJECTORY DATA PROFILES
Tactical flight Models
bull FTFM - Filed Tactical Flight Model The FTFM is the
ldquoinitialrdquo profile as it reflects the status of the demand before
activation of the regulation plan It is computed with the latest
flight plan version sent by each AO to the CFMUIFPS
bull RTFM - Regulated Tactical Flight Model The RTFM is the
ldquoregulatedrdquo profile as it reflects the status of the demand after
activation of the regulation plan It is computed with the latest
ATFM slot (CTOT) issued to the AO by the ground
regulation system
bull CTFM - Current Tactical Flight Model The CTFM is the
ldquoactualrdquo profile as it integrates the actual entry time of the
flights in the regulated TV It is computed with the Radar
Data sent by ACCs to CFMUETFMS ref
CPG_GEN - Profiles generated by the CFMU path generation
tool
bull SCR - Shortest Constrained Route
bull SRR - Shortest RAD restriction applied Route
bull SUR - Shortest Unconstrained Route
bull DCT - Direct route
CPF - Correlated Position reports for a Flight CPRs
(Correlated Position Reports) which are surveillance data
collected from the ACCs
Filed Flight Plan
CDM
Header
Point Profile
Airspace Profile
Circle Intersection
Profile
RTFM Profile
CTFM Profile
CFP Profile
FTFM Profile
4D TRAJECTORY DATA PROFILES
Current Tactical Flight Model (CTFM) is computed with Radar Data sent by
Area Control Centers to CFMUETFMS so it can be deemed as a fused
version of FTFM with real data
ENHANCED TACTICAL FLOW MANAGEMENT SYSTEM (ETFMS) EUROCONTROL 2013
DATA TYPES
bull Base of Aircraft Data (BADA) depending on ac type
ndash Nominal control variables (BADA 3)
ndash Full flight variable envelope (BADA 4)
bull optimization
Aircraft
Performance
Data
AIRCRAFT EQUATION OF MOTION
bull equation of motion sufficient in 3 dof
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
number of parameters of the system that may vary independently
BASE OF AIRCRAFT DATA (BADA)
bull There are two families of BADA APM based on the same modelling approach and components [EUROCONTROL]
bull BADA Family 3ndash providing a 90 coverage of the current aircraft types operating
in the ECAC airspace
ndash model aircraft behaviour over the normal operations part of the flight envelope and to meet todays requirements for aircraft performance modelling and simulation
bull BADA Family 4 ndash a newly developed model intended to meet advanced functional
and precision requirements of the new ATM systems
ndash providing a 60 coverage of the current aircraft types operating in ECAC airspace
ndash BADA 4 provides accurate modelling of aircraft over the entire flight envelope and enables modelling and simulation of advanced concepts of future systems
AIRCRAFT PERFORMANCE MODEL
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
BADA AIRCRAFT LIMITATION MODEL
DATA TYPES
bull Business objectives
ndash Cost Index
ndash User Preferences Model (UPM)
ndash Ground delays due to connectionshellip
Business Rules
euro
HORIZONTAL OPTIMISATION
TO_WPT FROM_WPT Cost
A
B
C
DEP
DEP
DEP
21
25
23
A
A
E
B
52
40
CG 45
B
B
E
F
49
53
G
G
F
J
73
79
E
E
K
H
84
75
F
F
H
I
70
67
I
I
L
M
96
85
HL 86
JM 119
KO 117
KL 109
MQ 115
LP 118
QDEST 134
OP 136
PDEST 130
Worklist
Dijkstra algorithm
DEPDEST
16
40
19
12
19
J
28
34
I14
17
O33
25
Q30
P32
F24
28
D
E
19
31
G22
A
B
C
2125
23
H
K
35
26 L
M18
29
1) Selection of segments for current from- waypoint
2) Calculation of costs for selected segments
3) Entering calculated datasets into worklist
4) Selection of best dataset from worklist
5) To- waypoint of best dataset becomes from- waypoint
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS

COST DEFINITION
COST INDEX EXAMPLE
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
INPUTS
bull Initial conditions (IC)
bull Flight Intent (FI)
bull User Preferences Model (UPM)
ndash ie airline policy
bull Operational Context Model (OCM)
ndash rules of airpace including
STARs and SIDs
bull ie ATFM policy
ndash Aircraft Performance Model
(APM)
bull Based on BADA
ndash Weather Model (WM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Flight Intent with User Preferences Model (UPM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull FI with UPM and Operational Context Model (OCM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory with details
DATA TYPES
bull Flight Plan
bull Regulated Flight Plan
bull Actual Flight data (Current Tactical)
bull Correlated Position data
bull CDM related data
Basic Flight
Data amp
Schedule
4D TRAJECTORY DATA PROFILES
LIPEEDFMJMP803JMPD22820110301031200BB9377945220110301031500FPLFPLAFPNEXENEXENNN2011030103150020110301031500TEFINS783849NNN00ACHN
NNN600300N00N0NDCULTNRSNNK00344154791F160N0234019032500LIPELUPOS5N10A443151N0111749EY
032955DCT7518V443121N0110416E32Y 033515DCT15038V443048N0104912E67Y 033640DCT16043V443040N0104526E75Y
033830LUPOSL99516057W443017N0103453EY 034355PARL99516099N444920N0101736EY 034735MISPOL995160127W450126N0100450EY
035305BEKANL995160169W451930N0094540EY 035720TZOL995160202N453333N0093026EY 040450PEPAGN851160260W455902N0090417EY
040730ABESIN851160280W460935N0090234EY 041350PIXOSN851160329W463619N0085859EY 041800SOPERN851160361W465322N0085640EY
042155ELMURN851160391W470924N0085427EY 042350ROLSAN851160406W471723N0085321EY 042705KUDESDCT160431W473115N0085126EN
044840DCT160597V490001N0083550E76N 045435DCT75623V491355N0083323E88N
050205EDFM3650A492821N0083051EN23032500LI040545NAS443151N0111749E460244N0090341E11600267
032500LIMMFIR040545FIR443151N0111749E460244N0090341E11600267 032500LIPECR033115ES443151N0111749E443113N0110030E194023
032500LIPECTR033115AUA443151N0111749E443113N0110030E194023 033115LIPPADS033735ES443113N0110030E443029N0104009E941602350
033115LIPPC1X033735ES443113N0110030E443029N0104009E941602350 033115LIPPCTA033735AUA443113N0110030E443029N0104009E941602350
033735LIMMECTA034805AUA443029N0104009E450310N0100300E16016050131 033735LIMMES1034805ES443029N0104009E450310N0100300E16016050131
033735LIMMES1X034805ES443029N0104009E450310N0100300E16016050131 034635LIMMR60041420ES445759N0100829E463827N0085842E160160119333
034805LIMMACTA040730AUA450310N0100300E460935N0090234E160160131280 034805LIMMADE035640ES450310N0100300E453126N0093244E160160131197
035640LIMMANE040730ES453126N0093244E460935N0090234E160160197280 040545LS042705NAS460244N0090341E473115N0085126E160160267431
040545LSASFIR042705FIR460244N0090341E473115N0085126E160160267431 040730LSAZCTA042705AUA460935N0090234E473115N0085126E160160280431
040730LSAZSSL042420ES460935N0090234E471936N0085303E160160280410 041545LSTSA50P042020CRSA464419N0085754E470300N0085520E160160344379
041545LSTSA52P041620ERSA464419N0085754E464627N0085736E160160344348 041620LSTSA51P042020ERSA464627N0085736E470300N0085520E160160348379
042020LSTSA40P042115ERSA470300N0085520E470644N0085449E160160379386
042420LSAZESL042705ES471936N0085303E473115N0085126E1601604104310344157065F160N02340 F140N023493 F160N023498 F150N0234390
F100N023439778032200LIPELUPOS5N10A443151N0111749EY 032540DCT6014V443128N0110716E25Y 032730DCT6022V443115N0110115E39Y
032800DCT6824V443111N0105944E42Y 032830DCT7027V443106N0105729E47Y 032845DCT7528V443105N0105644E49Y 032855DCT7829V443103N0105558E51Y
032910DCT8030V443102N0105513E53Y 032925DCT8032V443058N0105343E56Y 032955DCT8834V443055N0105212E60Y 033035DCT10037V443050N0104957E65Y
033040DCT10038V443048N0104912E67Y 033050DCT10439V443047N0104826E68Y 033110DCT10640V443045N0104741E70Y 033150DCT10644V443038N0104441E77Y
033155DCT11045V443037N0104355E79Y 033215LUPOSL99511057W443017N0103453EY 033240DCT11071V443638N0102907E33Y
033245DCT11472V443705N0102843E36Y 033310DCT12074V443800N0102753E40Y 033335DCT12078V443948N0102615E50Y 033345DCT12479V444016N0102550E52Y
033410DCT12880V444043N0102525E55Y 033445DCT12883V444205N0102411E62Y 033500DCT13084V444232N0102346E64Y 033515DCT13087V444353N0102232E71Y
033540DCT13789V444448N0102143E76Y 033600DCT14090V444515N0102118E79Y 033620DCT14092V444609N0102029E83Y 033640DCT14493V444637N0102004E86Y
033700DCT14094V444704N0101939E88Y 033740DCT14098V444853N0101801E98Y 033755PARL99514499N444920N0101736EY
034015DCT144120V445825N0100802E75Y 034110MISPOL995145127W450126N0100450EY 034200DCT145134V450427N0100138E17Y
034215DCT150135V450452N0100111E19Y 034250DCT150140V450702N0095854E31Y 034325DCT154142V450753N0095759E36Y
034405DCT160145V450911N0095637E43Y 034425DCT160148V451028N0095515E50Y 034520DCT160155V451329N0095203E67Y
034625DCT160162V451629N0094852E83Y 034720BEKANL995160169W451930N0094540EY 035145TZOL995160202N453333N0093026EY
035700DCT160242V455107N0091224E69Y 035925PEPAGN851160260W455902N0090417EY 040205ABESIN851160280W460935N0090234EY
040715DCT160319V463052N0085943E80Y 040840PIXOSN851160329W463619N0085859EY 041315SOPERN851160361W465322N0085640EY
041720DCT160390V470852N0085431E97Y 041730ELMURN851157391W470924N0085427EY 041755DCT150393V471028N0085418E13Y
041820DCT150397V471236N0085401E40Y 041920DCT150405V471651N0085325E93Y 041935ROLSAN851147406W471723N0085321EY
042000DCT140408V471830N0085312E8Y 042125DCT140419V472436N0085221E52Y 042205DCT140425V472755N0085154E76Y
042225DCT134427V472902N0085144E84Y 042240DCT130428V472935N0085140E88Y 042320KUDESN851121431W473115N0085126EN
042435DCT100437V473343N0085439E21N 042720ROMIRN851100459W474247N0090628EN 042825VEDOKN851100468W474724N0090714EN
042905TINOXDCT100473W475007N0090740EY 044335DCT100571G484048N0084511EY 045005DCT100607V485957N0083916E68Y
045040DCT94609V490101N0083856E72Y 045100DCT94611V490205N0083836E75Y 045140DCT84614V490341N0083807E81Y 045200DCT84616V490445N0083747E85Y
045240DCT74619V490620N0083717E91Y 045345INKAMDCT54624W490900N0083628EY 045655DCT54642V491820N0083258E56Y
045950DCT16656G492536N0083015EY 050110EDFM3661A492821N0083051EY39032200LI040020NAS443151N0111749E460244N0090341E11600267
032200LIMMFIR040020FIR443151N0111749E460244N0090341E11600267 032200LIPECR033020ES443151N0111749E443052N0105042E196036
032200LIPECTR033020AUA443151N0111749E443052N0105042E196036 033020LIPPADS033205ES443052N0105042E443029N0104009E961103650
033020LIPPC1X033205ES443052N0105042E443029N0104009E961103650 033020LIPPCTA033205AUA443052N0105042E443029N0104009E961103650
033205LIMMECTA034140AUA443029N0104009E450310N0100300E11014550131 033205LIMMES1034140ES443029N0104009E450310N0100300E11014550131
4D TRAJECTORY DATA PROFILES
Tactical flight Models
bull FTFM - Filed Tactical Flight Model The FTFM is the
ldquoinitialrdquo profile as it reflects the status of the demand before
activation of the regulation plan It is computed with the latest
flight plan version sent by each AO to the CFMUIFPS
bull RTFM - Regulated Tactical Flight Model The RTFM is the
ldquoregulatedrdquo profile as it reflects the status of the demand after
activation of the regulation plan It is computed with the latest
ATFM slot (CTOT) issued to the AO by the ground
regulation system
bull CTFM - Current Tactical Flight Model The CTFM is the
ldquoactualrdquo profile as it integrates the actual entry time of the
flights in the regulated TV It is computed with the Radar
Data sent by ACCs to CFMUETFMS ref
CPG_GEN - Profiles generated by the CFMU path generation
tool
bull SCR - Shortest Constrained Route
bull SRR - Shortest RAD restriction applied Route
bull SUR - Shortest Unconstrained Route
bull DCT - Direct route
CPF - Correlated Position reports for a Flight CPRs
(Correlated Position Reports) which are surveillance data
collected from the ACCs
Filed Flight Plan
CDM
Header
Point Profile
Airspace Profile
Circle Intersection
Profile
RTFM Profile
CTFM Profile
CFP Profile
FTFM Profile
4D TRAJECTORY DATA PROFILES
Current Tactical Flight Model (CTFM) is computed with Radar Data sent by
Area Control Centers to CFMUETFMS so it can be deemed as a fused
version of FTFM with real data
ENHANCED TACTICAL FLOW MANAGEMENT SYSTEM (ETFMS) EUROCONTROL 2013
DATA TYPES
bull Base of Aircraft Data (BADA) depending on ac type
ndash Nominal control variables (BADA 3)
ndash Full flight variable envelope (BADA 4)
bull optimization
Aircraft
Performance
Data
AIRCRAFT EQUATION OF MOTION
bull equation of motion sufficient in 3 dof
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
number of parameters of the system that may vary independently
BASE OF AIRCRAFT DATA (BADA)
bull There are two families of BADA APM based on the same modelling approach and components [EUROCONTROL]
bull BADA Family 3ndash providing a 90 coverage of the current aircraft types operating
in the ECAC airspace
ndash model aircraft behaviour over the normal operations part of the flight envelope and to meet todays requirements for aircraft performance modelling and simulation
bull BADA Family 4 ndash a newly developed model intended to meet advanced functional
and precision requirements of the new ATM systems
ndash providing a 60 coverage of the current aircraft types operating in ECAC airspace
ndash BADA 4 provides accurate modelling of aircraft over the entire flight envelope and enables modelling and simulation of advanced concepts of future systems
AIRCRAFT PERFORMANCE MODEL
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
BADA AIRCRAFT LIMITATION MODEL
DATA TYPES
bull Business objectives
ndash Cost Index
ndash User Preferences Model (UPM)
ndash Ground delays due to connectionshellip
Business Rules
euro
HORIZONTAL OPTIMISATION
TO_WPT FROM_WPT Cost
A
B
C
DEP
DEP
DEP
21
25
23
A
A
E
B
52
40
CG 45
B
B
E
F
49
53
G
G
F
J
73
79
E
E
K
H
84
75
F
F
H
I
70
67
I
I
L
M
96
85
HL 86
JM 119
KO 117
KL 109
MQ 115
LP 118
QDEST 134
OP 136
PDEST 130
Worklist
Dijkstra algorithm
DEPDEST
16
40
19
12
19
J
28
34
I14
17
O33
25
Q30
P32
F24
28
D
E
19
31
G22
A
B
C
2125
23
H
K
35
26 L
M18
29
1) Selection of segments for current from- waypoint
2) Calculation of costs for selected segments
3) Entering calculated datasets into worklist
4) Selection of best dataset from worklist
5) To- waypoint of best dataset becomes from- waypoint
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
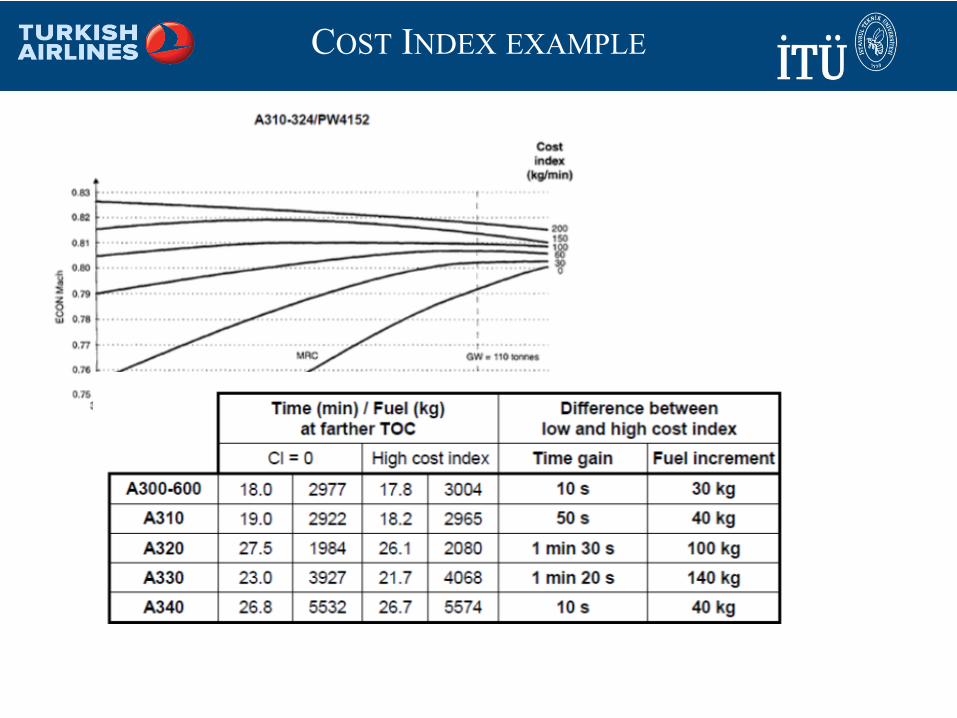
COST INDEX EXAMPLE
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
INPUTS
bull Initial conditions (IC)
bull Flight Intent (FI)
bull User Preferences Model (UPM)
ndash ie airline policy
bull Operational Context Model (OCM)
ndash rules of airpace including
STARs and SIDs
bull ie ATFM policy
ndash Aircraft Performance Model
(APM)
bull Based on BADA
ndash Weather Model (WM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Flight Intent with User Preferences Model (UPM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull FI with UPM and Operational Context Model (OCM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory with details
DATA TYPES
bull Flight Plan
bull Regulated Flight Plan
bull Actual Flight data (Current Tactical)
bull Correlated Position data
bull CDM related data
Basic Flight
Data amp
Schedule
4D TRAJECTORY DATA PROFILES
LIPEEDFMJMP803JMPD22820110301031200BB9377945220110301031500FPLFPLAFPNEXENEXENNN2011030103150020110301031500TEFINS783849NNN00ACHN
NNN600300N00N0NDCULTNRSNNK00344154791F160N0234019032500LIPELUPOS5N10A443151N0111749EY
032955DCT7518V443121N0110416E32Y 033515DCT15038V443048N0104912E67Y 033640DCT16043V443040N0104526E75Y
033830LUPOSL99516057W443017N0103453EY 034355PARL99516099N444920N0101736EY 034735MISPOL995160127W450126N0100450EY
035305BEKANL995160169W451930N0094540EY 035720TZOL995160202N453333N0093026EY 040450PEPAGN851160260W455902N0090417EY
040730ABESIN851160280W460935N0090234EY 041350PIXOSN851160329W463619N0085859EY 041800SOPERN851160361W465322N0085640EY
042155ELMURN851160391W470924N0085427EY 042350ROLSAN851160406W471723N0085321EY 042705KUDESDCT160431W473115N0085126EN
044840DCT160597V490001N0083550E76N 045435DCT75623V491355N0083323E88N
050205EDFM3650A492821N0083051EN23032500LI040545NAS443151N0111749E460244N0090341E11600267
032500LIMMFIR040545FIR443151N0111749E460244N0090341E11600267 032500LIPECR033115ES443151N0111749E443113N0110030E194023
032500LIPECTR033115AUA443151N0111749E443113N0110030E194023 033115LIPPADS033735ES443113N0110030E443029N0104009E941602350
033115LIPPC1X033735ES443113N0110030E443029N0104009E941602350 033115LIPPCTA033735AUA443113N0110030E443029N0104009E941602350
033735LIMMECTA034805AUA443029N0104009E450310N0100300E16016050131 033735LIMMES1034805ES443029N0104009E450310N0100300E16016050131
033735LIMMES1X034805ES443029N0104009E450310N0100300E16016050131 034635LIMMR60041420ES445759N0100829E463827N0085842E160160119333
034805LIMMACTA040730AUA450310N0100300E460935N0090234E160160131280 034805LIMMADE035640ES450310N0100300E453126N0093244E160160131197
035640LIMMANE040730ES453126N0093244E460935N0090234E160160197280 040545LS042705NAS460244N0090341E473115N0085126E160160267431
040545LSASFIR042705FIR460244N0090341E473115N0085126E160160267431 040730LSAZCTA042705AUA460935N0090234E473115N0085126E160160280431
040730LSAZSSL042420ES460935N0090234E471936N0085303E160160280410 041545LSTSA50P042020CRSA464419N0085754E470300N0085520E160160344379
041545LSTSA52P041620ERSA464419N0085754E464627N0085736E160160344348 041620LSTSA51P042020ERSA464627N0085736E470300N0085520E160160348379
042020LSTSA40P042115ERSA470300N0085520E470644N0085449E160160379386
042420LSAZESL042705ES471936N0085303E473115N0085126E1601604104310344157065F160N02340 F140N023493 F160N023498 F150N0234390
F100N023439778032200LIPELUPOS5N10A443151N0111749EY 032540DCT6014V443128N0110716E25Y 032730DCT6022V443115N0110115E39Y
032800DCT6824V443111N0105944E42Y 032830DCT7027V443106N0105729E47Y 032845DCT7528V443105N0105644E49Y 032855DCT7829V443103N0105558E51Y
032910DCT8030V443102N0105513E53Y 032925DCT8032V443058N0105343E56Y 032955DCT8834V443055N0105212E60Y 033035DCT10037V443050N0104957E65Y
033040DCT10038V443048N0104912E67Y 033050DCT10439V443047N0104826E68Y 033110DCT10640V443045N0104741E70Y 033150DCT10644V443038N0104441E77Y
033155DCT11045V443037N0104355E79Y 033215LUPOSL99511057W443017N0103453EY 033240DCT11071V443638N0102907E33Y
033245DCT11472V443705N0102843E36Y 033310DCT12074V443800N0102753E40Y 033335DCT12078V443948N0102615E50Y 033345DCT12479V444016N0102550E52Y
033410DCT12880V444043N0102525E55Y 033445DCT12883V444205N0102411E62Y 033500DCT13084V444232N0102346E64Y 033515DCT13087V444353N0102232E71Y
033540DCT13789V444448N0102143E76Y 033600DCT14090V444515N0102118E79Y 033620DCT14092V444609N0102029E83Y 033640DCT14493V444637N0102004E86Y
033700DCT14094V444704N0101939E88Y 033740DCT14098V444853N0101801E98Y 033755PARL99514499N444920N0101736EY
034015DCT144120V445825N0100802E75Y 034110MISPOL995145127W450126N0100450EY 034200DCT145134V450427N0100138E17Y
034215DCT150135V450452N0100111E19Y 034250DCT150140V450702N0095854E31Y 034325DCT154142V450753N0095759E36Y
034405DCT160145V450911N0095637E43Y 034425DCT160148V451028N0095515E50Y 034520DCT160155V451329N0095203E67Y
034625DCT160162V451629N0094852E83Y 034720BEKANL995160169W451930N0094540EY 035145TZOL995160202N453333N0093026EY
035700DCT160242V455107N0091224E69Y 035925PEPAGN851160260W455902N0090417EY 040205ABESIN851160280W460935N0090234EY
040715DCT160319V463052N0085943E80Y 040840PIXOSN851160329W463619N0085859EY 041315SOPERN851160361W465322N0085640EY
041720DCT160390V470852N0085431E97Y 041730ELMURN851157391W470924N0085427EY 041755DCT150393V471028N0085418E13Y
041820DCT150397V471236N0085401E40Y 041920DCT150405V471651N0085325E93Y 041935ROLSAN851147406W471723N0085321EY
042000DCT140408V471830N0085312E8Y 042125DCT140419V472436N0085221E52Y 042205DCT140425V472755N0085154E76Y
042225DCT134427V472902N0085144E84Y 042240DCT130428V472935N0085140E88Y 042320KUDESN851121431W473115N0085126EN
042435DCT100437V473343N0085439E21N 042720ROMIRN851100459W474247N0090628EN 042825VEDOKN851100468W474724N0090714EN
042905TINOXDCT100473W475007N0090740EY 044335DCT100571G484048N0084511EY 045005DCT100607V485957N0083916E68Y
045040DCT94609V490101N0083856E72Y 045100DCT94611V490205N0083836E75Y 045140DCT84614V490341N0083807E81Y 045200DCT84616V490445N0083747E85Y
045240DCT74619V490620N0083717E91Y 045345INKAMDCT54624W490900N0083628EY 045655DCT54642V491820N0083258E56Y
045950DCT16656G492536N0083015EY 050110EDFM3661A492821N0083051EY39032200LI040020NAS443151N0111749E460244N0090341E11600267
032200LIMMFIR040020FIR443151N0111749E460244N0090341E11600267 032200LIPECR033020ES443151N0111749E443052N0105042E196036
032200LIPECTR033020AUA443151N0111749E443052N0105042E196036 033020LIPPADS033205ES443052N0105042E443029N0104009E961103650
033020LIPPC1X033205ES443052N0105042E443029N0104009E961103650 033020LIPPCTA033205AUA443052N0105042E443029N0104009E961103650
033205LIMMECTA034140AUA443029N0104009E450310N0100300E11014550131 033205LIMMES1034140ES443029N0104009E450310N0100300E11014550131
4D TRAJECTORY DATA PROFILES
Tactical flight Models
bull FTFM - Filed Tactical Flight Model The FTFM is the
ldquoinitialrdquo profile as it reflects the status of the demand before
activation of the regulation plan It is computed with the latest
flight plan version sent by each AO to the CFMUIFPS
bull RTFM - Regulated Tactical Flight Model The RTFM is the
ldquoregulatedrdquo profile as it reflects the status of the demand after
activation of the regulation plan It is computed with the latest
ATFM slot (CTOT) issued to the AO by the ground
regulation system
bull CTFM - Current Tactical Flight Model The CTFM is the
ldquoactualrdquo profile as it integrates the actual entry time of the
flights in the regulated TV It is computed with the Radar
Data sent by ACCs to CFMUETFMS ref
CPG_GEN - Profiles generated by the CFMU path generation
tool
bull SCR - Shortest Constrained Route
bull SRR - Shortest RAD restriction applied Route
bull SUR - Shortest Unconstrained Route
bull DCT - Direct route
CPF - Correlated Position reports for a Flight CPRs
(Correlated Position Reports) which are surveillance data
collected from the ACCs
Filed Flight Plan
CDM
Header
Point Profile
Airspace Profile
Circle Intersection
Profile
RTFM Profile
CTFM Profile
CFP Profile
FTFM Profile
4D TRAJECTORY DATA PROFILES
Current Tactical Flight Model (CTFM) is computed with Radar Data sent by
Area Control Centers to CFMUETFMS so it can be deemed as a fused
version of FTFM with real data
ENHANCED TACTICAL FLOW MANAGEMENT SYSTEM (ETFMS) EUROCONTROL 2013
DATA TYPES
bull Base of Aircraft Data (BADA) depending on ac type
ndash Nominal control variables (BADA 3)
ndash Full flight variable envelope (BADA 4)
bull optimization
Aircraft
Performance
Data
AIRCRAFT EQUATION OF MOTION
bull equation of motion sufficient in 3 dof
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
number of parameters of the system that may vary independently
BASE OF AIRCRAFT DATA (BADA)
bull There are two families of BADA APM based on the same modelling approach and components [EUROCONTROL]
bull BADA Family 3ndash providing a 90 coverage of the current aircraft types operating
in the ECAC airspace
ndash model aircraft behaviour over the normal operations part of the flight envelope and to meet todays requirements for aircraft performance modelling and simulation
bull BADA Family 4 ndash a newly developed model intended to meet advanced functional
and precision requirements of the new ATM systems
ndash providing a 60 coverage of the current aircraft types operating in ECAC airspace
ndash BADA 4 provides accurate modelling of aircraft over the entire flight envelope and enables modelling and simulation of advanced concepts of future systems
AIRCRAFT PERFORMANCE MODEL
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
BADA AIRCRAFT LIMITATION MODEL
DATA TYPES
bull Business objectives
ndash Cost Index
ndash User Preferences Model (UPM)
ndash Ground delays due to connectionshellip
Business Rules
euro
HORIZONTAL OPTIMISATION
TO_WPT FROM_WPT Cost
A
B
C
DEP
DEP
DEP
21
25
23
A
A
E
B
52
40
CG 45
B
B
E
F
49
53
G
G
F
J
73
79
E
E
K
H
84
75
F
F
H
I
70
67
I
I
L
M
96
85
HL 86
JM 119
KO 117
KL 109
MQ 115
LP 118
QDEST 134
OP 136
PDEST 130
Worklist
Dijkstra algorithm
DEPDEST
16
40
19
12
19
J
28
34
I14
17
O33
25
Q30
P32
F24
28
D
E
19
31
G22
A
B
C
2125
23
H
K
35
26 L
M18
29
1) Selection of segments for current from- waypoint
2) Calculation of costs for selected segments
3) Entering calculated datasets into worklist
4) Selection of best dataset from worklist
5) To- waypoint of best dataset becomes from- waypoint
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
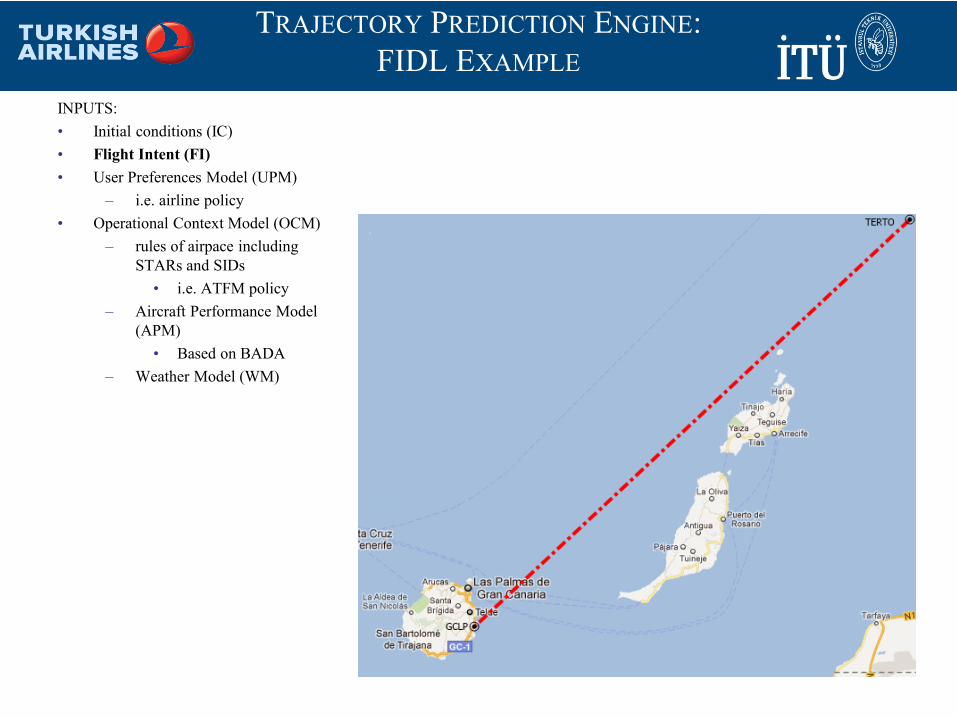
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
INPUTS
bull Initial conditions (IC)
bull Flight Intent (FI)
bull User Preferences Model (UPM)
ndash ie airline policy
bull Operational Context Model (OCM)
ndash rules of airpace including
STARs and SIDs
bull ie ATFM policy
ndash Aircraft Performance Model
(APM)
bull Based on BADA
ndash Weather Model (WM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Flight Intent with User Preferences Model (UPM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull FI with UPM and Operational Context Model (OCM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory with details
DATA TYPES
bull Flight Plan
bull Regulated Flight Plan
bull Actual Flight data (Current Tactical)
bull Correlated Position data
bull CDM related data
Basic Flight
Data amp
Schedule
4D TRAJECTORY DATA PROFILES
LIPEEDFMJMP803JMPD22820110301031200BB9377945220110301031500FPLFPLAFPNEXENEXENNN2011030103150020110301031500TEFINS783849NNN00ACHN
NNN600300N00N0NDCULTNRSNNK00344154791F160N0234019032500LIPELUPOS5N10A443151N0111749EY
032955DCT7518V443121N0110416E32Y 033515DCT15038V443048N0104912E67Y 033640DCT16043V443040N0104526E75Y
033830LUPOSL99516057W443017N0103453EY 034355PARL99516099N444920N0101736EY 034735MISPOL995160127W450126N0100450EY
035305BEKANL995160169W451930N0094540EY 035720TZOL995160202N453333N0093026EY 040450PEPAGN851160260W455902N0090417EY
040730ABESIN851160280W460935N0090234EY 041350PIXOSN851160329W463619N0085859EY 041800SOPERN851160361W465322N0085640EY
042155ELMURN851160391W470924N0085427EY 042350ROLSAN851160406W471723N0085321EY 042705KUDESDCT160431W473115N0085126EN
044840DCT160597V490001N0083550E76N 045435DCT75623V491355N0083323E88N
050205EDFM3650A492821N0083051EN23032500LI040545NAS443151N0111749E460244N0090341E11600267
032500LIMMFIR040545FIR443151N0111749E460244N0090341E11600267 032500LIPECR033115ES443151N0111749E443113N0110030E194023
032500LIPECTR033115AUA443151N0111749E443113N0110030E194023 033115LIPPADS033735ES443113N0110030E443029N0104009E941602350
033115LIPPC1X033735ES443113N0110030E443029N0104009E941602350 033115LIPPCTA033735AUA443113N0110030E443029N0104009E941602350
033735LIMMECTA034805AUA443029N0104009E450310N0100300E16016050131 033735LIMMES1034805ES443029N0104009E450310N0100300E16016050131
033735LIMMES1X034805ES443029N0104009E450310N0100300E16016050131 034635LIMMR60041420ES445759N0100829E463827N0085842E160160119333
034805LIMMACTA040730AUA450310N0100300E460935N0090234E160160131280 034805LIMMADE035640ES450310N0100300E453126N0093244E160160131197
035640LIMMANE040730ES453126N0093244E460935N0090234E160160197280 040545LS042705NAS460244N0090341E473115N0085126E160160267431
040545LSASFIR042705FIR460244N0090341E473115N0085126E160160267431 040730LSAZCTA042705AUA460935N0090234E473115N0085126E160160280431
040730LSAZSSL042420ES460935N0090234E471936N0085303E160160280410 041545LSTSA50P042020CRSA464419N0085754E470300N0085520E160160344379
041545LSTSA52P041620ERSA464419N0085754E464627N0085736E160160344348 041620LSTSA51P042020ERSA464627N0085736E470300N0085520E160160348379
042020LSTSA40P042115ERSA470300N0085520E470644N0085449E160160379386
042420LSAZESL042705ES471936N0085303E473115N0085126E1601604104310344157065F160N02340 F140N023493 F160N023498 F150N0234390
F100N023439778032200LIPELUPOS5N10A443151N0111749EY 032540DCT6014V443128N0110716E25Y 032730DCT6022V443115N0110115E39Y
032800DCT6824V443111N0105944E42Y 032830DCT7027V443106N0105729E47Y 032845DCT7528V443105N0105644E49Y 032855DCT7829V443103N0105558E51Y
032910DCT8030V443102N0105513E53Y 032925DCT8032V443058N0105343E56Y 032955DCT8834V443055N0105212E60Y 033035DCT10037V443050N0104957E65Y
033040DCT10038V443048N0104912E67Y 033050DCT10439V443047N0104826E68Y 033110DCT10640V443045N0104741E70Y 033150DCT10644V443038N0104441E77Y
033155DCT11045V443037N0104355E79Y 033215LUPOSL99511057W443017N0103453EY 033240DCT11071V443638N0102907E33Y
033245DCT11472V443705N0102843E36Y 033310DCT12074V443800N0102753E40Y 033335DCT12078V443948N0102615E50Y 033345DCT12479V444016N0102550E52Y
033410DCT12880V444043N0102525E55Y 033445DCT12883V444205N0102411E62Y 033500DCT13084V444232N0102346E64Y 033515DCT13087V444353N0102232E71Y
033540DCT13789V444448N0102143E76Y 033600DCT14090V444515N0102118E79Y 033620DCT14092V444609N0102029E83Y 033640DCT14493V444637N0102004E86Y
033700DCT14094V444704N0101939E88Y 033740DCT14098V444853N0101801E98Y 033755PARL99514499N444920N0101736EY
034015DCT144120V445825N0100802E75Y 034110MISPOL995145127W450126N0100450EY 034200DCT145134V450427N0100138E17Y
034215DCT150135V450452N0100111E19Y 034250DCT150140V450702N0095854E31Y 034325DCT154142V450753N0095759E36Y
034405DCT160145V450911N0095637E43Y 034425DCT160148V451028N0095515E50Y 034520DCT160155V451329N0095203E67Y
034625DCT160162V451629N0094852E83Y 034720BEKANL995160169W451930N0094540EY 035145TZOL995160202N453333N0093026EY
035700DCT160242V455107N0091224E69Y 035925PEPAGN851160260W455902N0090417EY 040205ABESIN851160280W460935N0090234EY
040715DCT160319V463052N0085943E80Y 040840PIXOSN851160329W463619N0085859EY 041315SOPERN851160361W465322N0085640EY
041720DCT160390V470852N0085431E97Y 041730ELMURN851157391W470924N0085427EY 041755DCT150393V471028N0085418E13Y
041820DCT150397V471236N0085401E40Y 041920DCT150405V471651N0085325E93Y 041935ROLSAN851147406W471723N0085321EY
042000DCT140408V471830N0085312E8Y 042125DCT140419V472436N0085221E52Y 042205DCT140425V472755N0085154E76Y
042225DCT134427V472902N0085144E84Y 042240DCT130428V472935N0085140E88Y 042320KUDESN851121431W473115N0085126EN
042435DCT100437V473343N0085439E21N 042720ROMIRN851100459W474247N0090628EN 042825VEDOKN851100468W474724N0090714EN
042905TINOXDCT100473W475007N0090740EY 044335DCT100571G484048N0084511EY 045005DCT100607V485957N0083916E68Y
045040DCT94609V490101N0083856E72Y 045100DCT94611V490205N0083836E75Y 045140DCT84614V490341N0083807E81Y 045200DCT84616V490445N0083747E85Y
045240DCT74619V490620N0083717E91Y 045345INKAMDCT54624W490900N0083628EY 045655DCT54642V491820N0083258E56Y
045950DCT16656G492536N0083015EY 050110EDFM3661A492821N0083051EY39032200LI040020NAS443151N0111749E460244N0090341E11600267
032200LIMMFIR040020FIR443151N0111749E460244N0090341E11600267 032200LIPECR033020ES443151N0111749E443052N0105042E196036
032200LIPECTR033020AUA443151N0111749E443052N0105042E196036 033020LIPPADS033205ES443052N0105042E443029N0104009E961103650
033020LIPPC1X033205ES443052N0105042E443029N0104009E961103650 033020LIPPCTA033205AUA443052N0105042E443029N0104009E961103650
033205LIMMECTA034140AUA443029N0104009E450310N0100300E11014550131 033205LIMMES1034140ES443029N0104009E450310N0100300E11014550131
4D TRAJECTORY DATA PROFILES
Tactical flight Models
bull FTFM - Filed Tactical Flight Model The FTFM is the
ldquoinitialrdquo profile as it reflects the status of the demand before
activation of the regulation plan It is computed with the latest
flight plan version sent by each AO to the CFMUIFPS
bull RTFM - Regulated Tactical Flight Model The RTFM is the
ldquoregulatedrdquo profile as it reflects the status of the demand after
activation of the regulation plan It is computed with the latest
ATFM slot (CTOT) issued to the AO by the ground
regulation system
bull CTFM - Current Tactical Flight Model The CTFM is the
ldquoactualrdquo profile as it integrates the actual entry time of the
flights in the regulated TV It is computed with the Radar
Data sent by ACCs to CFMUETFMS ref
CPG_GEN - Profiles generated by the CFMU path generation
tool
bull SCR - Shortest Constrained Route
bull SRR - Shortest RAD restriction applied Route
bull SUR - Shortest Unconstrained Route
bull DCT - Direct route
CPF - Correlated Position reports for a Flight CPRs
(Correlated Position Reports) which are surveillance data
collected from the ACCs
Filed Flight Plan
CDM
Header
Point Profile
Airspace Profile
Circle Intersection
Profile
RTFM Profile
CTFM Profile
CFP Profile
FTFM Profile
4D TRAJECTORY DATA PROFILES
Current Tactical Flight Model (CTFM) is computed with Radar Data sent by
Area Control Centers to CFMUETFMS so it can be deemed as a fused
version of FTFM with real data
ENHANCED TACTICAL FLOW MANAGEMENT SYSTEM (ETFMS) EUROCONTROL 2013
DATA TYPES
bull Base of Aircraft Data (BADA) depending on ac type
ndash Nominal control variables (BADA 3)
ndash Full flight variable envelope (BADA 4)
bull optimization
Aircraft
Performance
Data
AIRCRAFT EQUATION OF MOTION
bull equation of motion sufficient in 3 dof
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
number of parameters of the system that may vary independently
BASE OF AIRCRAFT DATA (BADA)
bull There are two families of BADA APM based on the same modelling approach and components [EUROCONTROL]
bull BADA Family 3ndash providing a 90 coverage of the current aircraft types operating
in the ECAC airspace
ndash model aircraft behaviour over the normal operations part of the flight envelope and to meet todays requirements for aircraft performance modelling and simulation
bull BADA Family 4 ndash a newly developed model intended to meet advanced functional
and precision requirements of the new ATM systems
ndash providing a 60 coverage of the current aircraft types operating in ECAC airspace
ndash BADA 4 provides accurate modelling of aircraft over the entire flight envelope and enables modelling and simulation of advanced concepts of future systems
AIRCRAFT PERFORMANCE MODEL
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
BADA AIRCRAFT LIMITATION MODEL
DATA TYPES
bull Business objectives
ndash Cost Index
ndash User Preferences Model (UPM)
ndash Ground delays due to connectionshellip
Business Rules
euro
HORIZONTAL OPTIMISATION
TO_WPT FROM_WPT Cost
A
B
C
DEP
DEP
DEP
21
25
23
A
A
E
B
52
40
CG 45
B
B
E
F
49
53
G
G
F
J
73
79
E
E
K
H
84
75
F
F
H
I
70
67
I
I
L
M
96
85
HL 86
JM 119
KO 117
KL 109
MQ 115
LP 118
QDEST 134
OP 136
PDEST 130
Worklist
Dijkstra algorithm
DEPDEST
16
40
19
12
19
J
28
34
I14
17
O33
25
Q30
P32
F24
28
D
E
19
31
G22
A
B
C
2125
23
H
K
35
26 L
M18
29
1) Selection of segments for current from- waypoint
2) Calculation of costs for selected segments
3) Entering calculated datasets into worklist
4) Selection of best dataset from worklist
5) To- waypoint of best dataset becomes from- waypoint
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS

TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Flight Intent with User Preferences Model (UPM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull FI with UPM and Operational Context Model (OCM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory with details
DATA TYPES
bull Flight Plan
bull Regulated Flight Plan
bull Actual Flight data (Current Tactical)
bull Correlated Position data
bull CDM related data
Basic Flight
Data amp
Schedule
4D TRAJECTORY DATA PROFILES
LIPEEDFMJMP803JMPD22820110301031200BB9377945220110301031500FPLFPLAFPNEXENEXENNN2011030103150020110301031500TEFINS783849NNN00ACHN
NNN600300N00N0NDCULTNRSNNK00344154791F160N0234019032500LIPELUPOS5N10A443151N0111749EY
032955DCT7518V443121N0110416E32Y 033515DCT15038V443048N0104912E67Y 033640DCT16043V443040N0104526E75Y
033830LUPOSL99516057W443017N0103453EY 034355PARL99516099N444920N0101736EY 034735MISPOL995160127W450126N0100450EY
035305BEKANL995160169W451930N0094540EY 035720TZOL995160202N453333N0093026EY 040450PEPAGN851160260W455902N0090417EY
040730ABESIN851160280W460935N0090234EY 041350PIXOSN851160329W463619N0085859EY 041800SOPERN851160361W465322N0085640EY
042155ELMURN851160391W470924N0085427EY 042350ROLSAN851160406W471723N0085321EY 042705KUDESDCT160431W473115N0085126EN
044840DCT160597V490001N0083550E76N 045435DCT75623V491355N0083323E88N
050205EDFM3650A492821N0083051EN23032500LI040545NAS443151N0111749E460244N0090341E11600267
032500LIMMFIR040545FIR443151N0111749E460244N0090341E11600267 032500LIPECR033115ES443151N0111749E443113N0110030E194023
032500LIPECTR033115AUA443151N0111749E443113N0110030E194023 033115LIPPADS033735ES443113N0110030E443029N0104009E941602350
033115LIPPC1X033735ES443113N0110030E443029N0104009E941602350 033115LIPPCTA033735AUA443113N0110030E443029N0104009E941602350
033735LIMMECTA034805AUA443029N0104009E450310N0100300E16016050131 033735LIMMES1034805ES443029N0104009E450310N0100300E16016050131
033735LIMMES1X034805ES443029N0104009E450310N0100300E16016050131 034635LIMMR60041420ES445759N0100829E463827N0085842E160160119333
034805LIMMACTA040730AUA450310N0100300E460935N0090234E160160131280 034805LIMMADE035640ES450310N0100300E453126N0093244E160160131197
035640LIMMANE040730ES453126N0093244E460935N0090234E160160197280 040545LS042705NAS460244N0090341E473115N0085126E160160267431
040545LSASFIR042705FIR460244N0090341E473115N0085126E160160267431 040730LSAZCTA042705AUA460935N0090234E473115N0085126E160160280431
040730LSAZSSL042420ES460935N0090234E471936N0085303E160160280410 041545LSTSA50P042020CRSA464419N0085754E470300N0085520E160160344379
041545LSTSA52P041620ERSA464419N0085754E464627N0085736E160160344348 041620LSTSA51P042020ERSA464627N0085736E470300N0085520E160160348379
042020LSTSA40P042115ERSA470300N0085520E470644N0085449E160160379386
042420LSAZESL042705ES471936N0085303E473115N0085126E1601604104310344157065F160N02340 F140N023493 F160N023498 F150N0234390
F100N023439778032200LIPELUPOS5N10A443151N0111749EY 032540DCT6014V443128N0110716E25Y 032730DCT6022V443115N0110115E39Y
032800DCT6824V443111N0105944E42Y 032830DCT7027V443106N0105729E47Y 032845DCT7528V443105N0105644E49Y 032855DCT7829V443103N0105558E51Y
032910DCT8030V443102N0105513E53Y 032925DCT8032V443058N0105343E56Y 032955DCT8834V443055N0105212E60Y 033035DCT10037V443050N0104957E65Y
033040DCT10038V443048N0104912E67Y 033050DCT10439V443047N0104826E68Y 033110DCT10640V443045N0104741E70Y 033150DCT10644V443038N0104441E77Y
033155DCT11045V443037N0104355E79Y 033215LUPOSL99511057W443017N0103453EY 033240DCT11071V443638N0102907E33Y
033245DCT11472V443705N0102843E36Y 033310DCT12074V443800N0102753E40Y 033335DCT12078V443948N0102615E50Y 033345DCT12479V444016N0102550E52Y
033410DCT12880V444043N0102525E55Y 033445DCT12883V444205N0102411E62Y 033500DCT13084V444232N0102346E64Y 033515DCT13087V444353N0102232E71Y
033540DCT13789V444448N0102143E76Y 033600DCT14090V444515N0102118E79Y 033620DCT14092V444609N0102029E83Y 033640DCT14493V444637N0102004E86Y
033700DCT14094V444704N0101939E88Y 033740DCT14098V444853N0101801E98Y 033755PARL99514499N444920N0101736EY
034015DCT144120V445825N0100802E75Y 034110MISPOL995145127W450126N0100450EY 034200DCT145134V450427N0100138E17Y
034215DCT150135V450452N0100111E19Y 034250DCT150140V450702N0095854E31Y 034325DCT154142V450753N0095759E36Y
034405DCT160145V450911N0095637E43Y 034425DCT160148V451028N0095515E50Y 034520DCT160155V451329N0095203E67Y
034625DCT160162V451629N0094852E83Y 034720BEKANL995160169W451930N0094540EY 035145TZOL995160202N453333N0093026EY
035700DCT160242V455107N0091224E69Y 035925PEPAGN851160260W455902N0090417EY 040205ABESIN851160280W460935N0090234EY
040715DCT160319V463052N0085943E80Y 040840PIXOSN851160329W463619N0085859EY 041315SOPERN851160361W465322N0085640EY
041720DCT160390V470852N0085431E97Y 041730ELMURN851157391W470924N0085427EY 041755DCT150393V471028N0085418E13Y
041820DCT150397V471236N0085401E40Y 041920DCT150405V471651N0085325E93Y 041935ROLSAN851147406W471723N0085321EY
042000DCT140408V471830N0085312E8Y 042125DCT140419V472436N0085221E52Y 042205DCT140425V472755N0085154E76Y
042225DCT134427V472902N0085144E84Y 042240DCT130428V472935N0085140E88Y 042320KUDESN851121431W473115N0085126EN
042435DCT100437V473343N0085439E21N 042720ROMIRN851100459W474247N0090628EN 042825VEDOKN851100468W474724N0090714EN
042905TINOXDCT100473W475007N0090740EY 044335DCT100571G484048N0084511EY 045005DCT100607V485957N0083916E68Y
045040DCT94609V490101N0083856E72Y 045100DCT94611V490205N0083836E75Y 045140DCT84614V490341N0083807E81Y 045200DCT84616V490445N0083747E85Y
045240DCT74619V490620N0083717E91Y 045345INKAMDCT54624W490900N0083628EY 045655DCT54642V491820N0083258E56Y
045950DCT16656G492536N0083015EY 050110EDFM3661A492821N0083051EY39032200LI040020NAS443151N0111749E460244N0090341E11600267
032200LIMMFIR040020FIR443151N0111749E460244N0090341E11600267 032200LIPECR033020ES443151N0111749E443052N0105042E196036
032200LIPECTR033020AUA443151N0111749E443052N0105042E196036 033020LIPPADS033205ES443052N0105042E443029N0104009E961103650
033020LIPPC1X033205ES443052N0105042E443029N0104009E961103650 033020LIPPCTA033205AUA443052N0105042E443029N0104009E961103650
033205LIMMECTA034140AUA443029N0104009E450310N0100300E11014550131 033205LIMMES1034140ES443029N0104009E450310N0100300E11014550131
4D TRAJECTORY DATA PROFILES
Tactical flight Models
bull FTFM - Filed Tactical Flight Model The FTFM is the
ldquoinitialrdquo profile as it reflects the status of the demand before
activation of the regulation plan It is computed with the latest
flight plan version sent by each AO to the CFMUIFPS
bull RTFM - Regulated Tactical Flight Model The RTFM is the
ldquoregulatedrdquo profile as it reflects the status of the demand after
activation of the regulation plan It is computed with the latest
ATFM slot (CTOT) issued to the AO by the ground
regulation system
bull CTFM - Current Tactical Flight Model The CTFM is the
ldquoactualrdquo profile as it integrates the actual entry time of the
flights in the regulated TV It is computed with the Radar
Data sent by ACCs to CFMUETFMS ref
CPG_GEN - Profiles generated by the CFMU path generation
tool
bull SCR - Shortest Constrained Route
bull SRR - Shortest RAD restriction applied Route
bull SUR - Shortest Unconstrained Route
bull DCT - Direct route
CPF - Correlated Position reports for a Flight CPRs
(Correlated Position Reports) which are surveillance data
collected from the ACCs
Filed Flight Plan
CDM
Header
Point Profile
Airspace Profile
Circle Intersection
Profile
RTFM Profile
CTFM Profile
CFP Profile
FTFM Profile
4D TRAJECTORY DATA PROFILES
Current Tactical Flight Model (CTFM) is computed with Radar Data sent by
Area Control Centers to CFMUETFMS so it can be deemed as a fused
version of FTFM with real data
ENHANCED TACTICAL FLOW MANAGEMENT SYSTEM (ETFMS) EUROCONTROL 2013
DATA TYPES
bull Base of Aircraft Data (BADA) depending on ac type
ndash Nominal control variables (BADA 3)
ndash Full flight variable envelope (BADA 4)
bull optimization
Aircraft
Performance
Data
AIRCRAFT EQUATION OF MOTION
bull equation of motion sufficient in 3 dof
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
number of parameters of the system that may vary independently
BASE OF AIRCRAFT DATA (BADA)
bull There are two families of BADA APM based on the same modelling approach and components [EUROCONTROL]
bull BADA Family 3ndash providing a 90 coverage of the current aircraft types operating
in the ECAC airspace
ndash model aircraft behaviour over the normal operations part of the flight envelope and to meet todays requirements for aircraft performance modelling and simulation
bull BADA Family 4 ndash a newly developed model intended to meet advanced functional
and precision requirements of the new ATM systems
ndash providing a 60 coverage of the current aircraft types operating in ECAC airspace
ndash BADA 4 provides accurate modelling of aircraft over the entire flight envelope and enables modelling and simulation of advanced concepts of future systems
AIRCRAFT PERFORMANCE MODEL
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
BADA AIRCRAFT LIMITATION MODEL
DATA TYPES
bull Business objectives
ndash Cost Index
ndash User Preferences Model (UPM)
ndash Ground delays due to connectionshellip
Business Rules
euro
HORIZONTAL OPTIMISATION
TO_WPT FROM_WPT Cost
A
B
C
DEP
DEP
DEP
21
25
23
A
A
E
B
52
40
CG 45
B
B
E
F
49
53
G
G
F
J
73
79
E
E
K
H
84
75
F
F
H
I
70
67
I
I
L
M
96
85
HL 86
JM 119
KO 117
KL 109
MQ 115
LP 118
QDEST 134
OP 136
PDEST 130
Worklist
Dijkstra algorithm
DEPDEST
16
40
19
12
19
J
28
34
I14
17
O33
25
Q30
P32
F24
28
D
E
19
31
G22
A
B
C
2125
23
H
K
35
26 L
M18
29
1) Selection of segments for current from- waypoint
2) Calculation of costs for selected segments
3) Entering calculated datasets into worklist
4) Selection of best dataset from worklist
5) To- waypoint of best dataset becomes from- waypoint
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
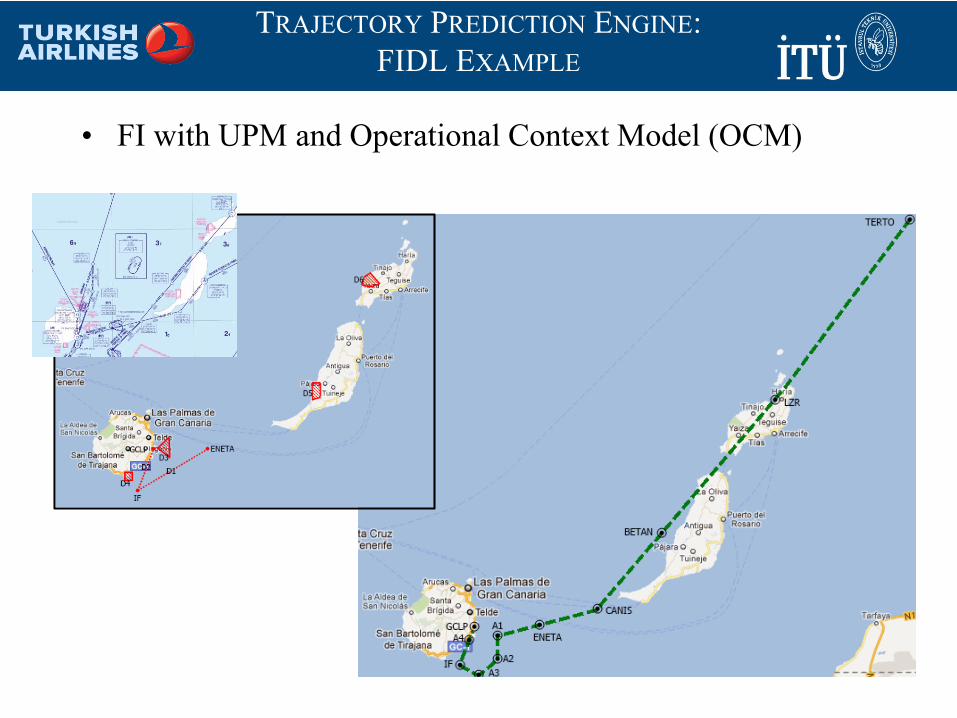
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull FI with UPM and Operational Context Model (OCM)
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory with details
DATA TYPES
bull Flight Plan
bull Regulated Flight Plan
bull Actual Flight data (Current Tactical)
bull Correlated Position data
bull CDM related data
Basic Flight
Data amp
Schedule
4D TRAJECTORY DATA PROFILES
LIPEEDFMJMP803JMPD22820110301031200BB9377945220110301031500FPLFPLAFPNEXENEXENNN2011030103150020110301031500TEFINS783849NNN00ACHN
NNN600300N00N0NDCULTNRSNNK00344154791F160N0234019032500LIPELUPOS5N10A443151N0111749EY
032955DCT7518V443121N0110416E32Y 033515DCT15038V443048N0104912E67Y 033640DCT16043V443040N0104526E75Y
033830LUPOSL99516057W443017N0103453EY 034355PARL99516099N444920N0101736EY 034735MISPOL995160127W450126N0100450EY
035305BEKANL995160169W451930N0094540EY 035720TZOL995160202N453333N0093026EY 040450PEPAGN851160260W455902N0090417EY
040730ABESIN851160280W460935N0090234EY 041350PIXOSN851160329W463619N0085859EY 041800SOPERN851160361W465322N0085640EY
042155ELMURN851160391W470924N0085427EY 042350ROLSAN851160406W471723N0085321EY 042705KUDESDCT160431W473115N0085126EN
044840DCT160597V490001N0083550E76N 045435DCT75623V491355N0083323E88N
050205EDFM3650A492821N0083051EN23032500LI040545NAS443151N0111749E460244N0090341E11600267
032500LIMMFIR040545FIR443151N0111749E460244N0090341E11600267 032500LIPECR033115ES443151N0111749E443113N0110030E194023
032500LIPECTR033115AUA443151N0111749E443113N0110030E194023 033115LIPPADS033735ES443113N0110030E443029N0104009E941602350
033115LIPPC1X033735ES443113N0110030E443029N0104009E941602350 033115LIPPCTA033735AUA443113N0110030E443029N0104009E941602350
033735LIMMECTA034805AUA443029N0104009E450310N0100300E16016050131 033735LIMMES1034805ES443029N0104009E450310N0100300E16016050131
033735LIMMES1X034805ES443029N0104009E450310N0100300E16016050131 034635LIMMR60041420ES445759N0100829E463827N0085842E160160119333
034805LIMMACTA040730AUA450310N0100300E460935N0090234E160160131280 034805LIMMADE035640ES450310N0100300E453126N0093244E160160131197
035640LIMMANE040730ES453126N0093244E460935N0090234E160160197280 040545LS042705NAS460244N0090341E473115N0085126E160160267431
040545LSASFIR042705FIR460244N0090341E473115N0085126E160160267431 040730LSAZCTA042705AUA460935N0090234E473115N0085126E160160280431
040730LSAZSSL042420ES460935N0090234E471936N0085303E160160280410 041545LSTSA50P042020CRSA464419N0085754E470300N0085520E160160344379
041545LSTSA52P041620ERSA464419N0085754E464627N0085736E160160344348 041620LSTSA51P042020ERSA464627N0085736E470300N0085520E160160348379
042020LSTSA40P042115ERSA470300N0085520E470644N0085449E160160379386
042420LSAZESL042705ES471936N0085303E473115N0085126E1601604104310344157065F160N02340 F140N023493 F160N023498 F150N0234390
F100N023439778032200LIPELUPOS5N10A443151N0111749EY 032540DCT6014V443128N0110716E25Y 032730DCT6022V443115N0110115E39Y
032800DCT6824V443111N0105944E42Y 032830DCT7027V443106N0105729E47Y 032845DCT7528V443105N0105644E49Y 032855DCT7829V443103N0105558E51Y
032910DCT8030V443102N0105513E53Y 032925DCT8032V443058N0105343E56Y 032955DCT8834V443055N0105212E60Y 033035DCT10037V443050N0104957E65Y
033040DCT10038V443048N0104912E67Y 033050DCT10439V443047N0104826E68Y 033110DCT10640V443045N0104741E70Y 033150DCT10644V443038N0104441E77Y
033155DCT11045V443037N0104355E79Y 033215LUPOSL99511057W443017N0103453EY 033240DCT11071V443638N0102907E33Y
033245DCT11472V443705N0102843E36Y 033310DCT12074V443800N0102753E40Y 033335DCT12078V443948N0102615E50Y 033345DCT12479V444016N0102550E52Y
033410DCT12880V444043N0102525E55Y 033445DCT12883V444205N0102411E62Y 033500DCT13084V444232N0102346E64Y 033515DCT13087V444353N0102232E71Y
033540DCT13789V444448N0102143E76Y 033600DCT14090V444515N0102118E79Y 033620DCT14092V444609N0102029E83Y 033640DCT14493V444637N0102004E86Y
033700DCT14094V444704N0101939E88Y 033740DCT14098V444853N0101801E98Y 033755PARL99514499N444920N0101736EY
034015DCT144120V445825N0100802E75Y 034110MISPOL995145127W450126N0100450EY 034200DCT145134V450427N0100138E17Y
034215DCT150135V450452N0100111E19Y 034250DCT150140V450702N0095854E31Y 034325DCT154142V450753N0095759E36Y
034405DCT160145V450911N0095637E43Y 034425DCT160148V451028N0095515E50Y 034520DCT160155V451329N0095203E67Y
034625DCT160162V451629N0094852E83Y 034720BEKANL995160169W451930N0094540EY 035145TZOL995160202N453333N0093026EY
035700DCT160242V455107N0091224E69Y 035925PEPAGN851160260W455902N0090417EY 040205ABESIN851160280W460935N0090234EY
040715DCT160319V463052N0085943E80Y 040840PIXOSN851160329W463619N0085859EY 041315SOPERN851160361W465322N0085640EY
041720DCT160390V470852N0085431E97Y 041730ELMURN851157391W470924N0085427EY 041755DCT150393V471028N0085418E13Y
041820DCT150397V471236N0085401E40Y 041920DCT150405V471651N0085325E93Y 041935ROLSAN851147406W471723N0085321EY
042000DCT140408V471830N0085312E8Y 042125DCT140419V472436N0085221E52Y 042205DCT140425V472755N0085154E76Y
042225DCT134427V472902N0085144E84Y 042240DCT130428V472935N0085140E88Y 042320KUDESN851121431W473115N0085126EN
042435DCT100437V473343N0085439E21N 042720ROMIRN851100459W474247N0090628EN 042825VEDOKN851100468W474724N0090714EN
042905TINOXDCT100473W475007N0090740EY 044335DCT100571G484048N0084511EY 045005DCT100607V485957N0083916E68Y
045040DCT94609V490101N0083856E72Y 045100DCT94611V490205N0083836E75Y 045140DCT84614V490341N0083807E81Y 045200DCT84616V490445N0083747E85Y
045240DCT74619V490620N0083717E91Y 045345INKAMDCT54624W490900N0083628EY 045655DCT54642V491820N0083258E56Y
045950DCT16656G492536N0083015EY 050110EDFM3661A492821N0083051EY39032200LI040020NAS443151N0111749E460244N0090341E11600267
032200LIMMFIR040020FIR443151N0111749E460244N0090341E11600267 032200LIPECR033020ES443151N0111749E443052N0105042E196036
032200LIPECTR033020AUA443151N0111749E443052N0105042E196036 033020LIPPADS033205ES443052N0105042E443029N0104009E961103650
033020LIPPC1X033205ES443052N0105042E443029N0104009E961103650 033020LIPPCTA033205AUA443052N0105042E443029N0104009E961103650
033205LIMMECTA034140AUA443029N0104009E450310N0100300E11014550131 033205LIMMES1034140ES443029N0104009E450310N0100300E11014550131
4D TRAJECTORY DATA PROFILES
Tactical flight Models
bull FTFM - Filed Tactical Flight Model The FTFM is the
ldquoinitialrdquo profile as it reflects the status of the demand before
activation of the regulation plan It is computed with the latest
flight plan version sent by each AO to the CFMUIFPS
bull RTFM - Regulated Tactical Flight Model The RTFM is the
ldquoregulatedrdquo profile as it reflects the status of the demand after
activation of the regulation plan It is computed with the latest
ATFM slot (CTOT) issued to the AO by the ground
regulation system
bull CTFM - Current Tactical Flight Model The CTFM is the
ldquoactualrdquo profile as it integrates the actual entry time of the
flights in the regulated TV It is computed with the Radar
Data sent by ACCs to CFMUETFMS ref
CPG_GEN - Profiles generated by the CFMU path generation
tool
bull SCR - Shortest Constrained Route
bull SRR - Shortest RAD restriction applied Route
bull SUR - Shortest Unconstrained Route
bull DCT - Direct route
CPF - Correlated Position reports for a Flight CPRs
(Correlated Position Reports) which are surveillance data
collected from the ACCs
Filed Flight Plan
CDM
Header
Point Profile
Airspace Profile
Circle Intersection
Profile
RTFM Profile
CTFM Profile
CFP Profile
FTFM Profile
4D TRAJECTORY DATA PROFILES
Current Tactical Flight Model (CTFM) is computed with Radar Data sent by
Area Control Centers to CFMUETFMS so it can be deemed as a fused
version of FTFM with real data
ENHANCED TACTICAL FLOW MANAGEMENT SYSTEM (ETFMS) EUROCONTROL 2013
DATA TYPES
bull Base of Aircraft Data (BADA) depending on ac type
ndash Nominal control variables (BADA 3)
ndash Full flight variable envelope (BADA 4)
bull optimization
Aircraft
Performance
Data
AIRCRAFT EQUATION OF MOTION
bull equation of motion sufficient in 3 dof
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
number of parameters of the system that may vary independently
BASE OF AIRCRAFT DATA (BADA)
bull There are two families of BADA APM based on the same modelling approach and components [EUROCONTROL]
bull BADA Family 3ndash providing a 90 coverage of the current aircraft types operating
in the ECAC airspace
ndash model aircraft behaviour over the normal operations part of the flight envelope and to meet todays requirements for aircraft performance modelling and simulation
bull BADA Family 4 ndash a newly developed model intended to meet advanced functional
and precision requirements of the new ATM systems
ndash providing a 60 coverage of the current aircraft types operating in ECAC airspace
ndash BADA 4 provides accurate modelling of aircraft over the entire flight envelope and enables modelling and simulation of advanced concepts of future systems
AIRCRAFT PERFORMANCE MODEL
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
BADA AIRCRAFT LIMITATION MODEL
DATA TYPES
bull Business objectives
ndash Cost Index
ndash User Preferences Model (UPM)
ndash Ground delays due to connectionshellip
Business Rules
euro
HORIZONTAL OPTIMISATION
TO_WPT FROM_WPT Cost
A
B
C
DEP
DEP
DEP
21
25
23
A
A
E
B
52
40
CG 45
B
B
E
F
49
53
G
G
F
J
73
79
E
E
K
H
84
75
F
F
H
I
70
67
I
I
L
M
96
85
HL 86
JM 119
KO 117
KL 109
MQ 115
LP 118
QDEST 134
OP 136
PDEST 130
Worklist
Dijkstra algorithm
DEPDEST
16
40
19
12
19
J
28
34
I14
17
O33
25
Q30
P32
F24
28
D
E
19
31
G22
A
B
C
2125
23
H
K
35
26 L
M18
29
1) Selection of segments for current from- waypoint
2) Calculation of costs for selected segments
3) Entering calculated datasets into worklist
4) Selection of best dataset from worklist
5) To- waypoint of best dataset becomes from- waypoint
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
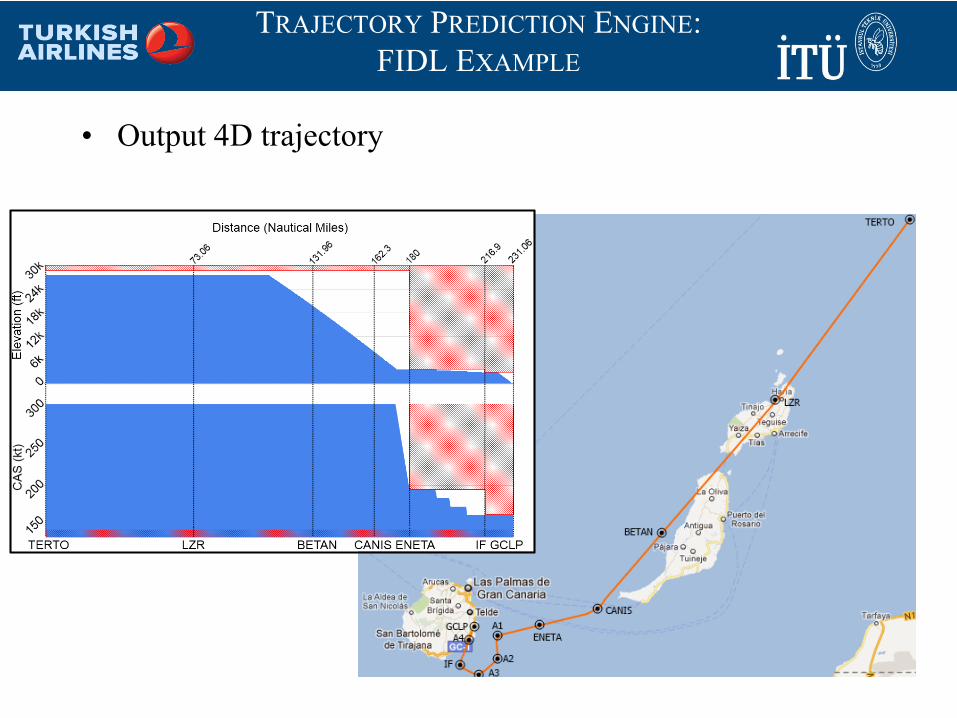
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory with details
DATA TYPES
bull Flight Plan
bull Regulated Flight Plan
bull Actual Flight data (Current Tactical)
bull Correlated Position data
bull CDM related data
Basic Flight
Data amp
Schedule
4D TRAJECTORY DATA PROFILES
LIPEEDFMJMP803JMPD22820110301031200BB9377945220110301031500FPLFPLAFPNEXENEXENNN2011030103150020110301031500TEFINS783849NNN00ACHN
NNN600300N00N0NDCULTNRSNNK00344154791F160N0234019032500LIPELUPOS5N10A443151N0111749EY
032955DCT7518V443121N0110416E32Y 033515DCT15038V443048N0104912E67Y 033640DCT16043V443040N0104526E75Y
033830LUPOSL99516057W443017N0103453EY 034355PARL99516099N444920N0101736EY 034735MISPOL995160127W450126N0100450EY
035305BEKANL995160169W451930N0094540EY 035720TZOL995160202N453333N0093026EY 040450PEPAGN851160260W455902N0090417EY
040730ABESIN851160280W460935N0090234EY 041350PIXOSN851160329W463619N0085859EY 041800SOPERN851160361W465322N0085640EY
042155ELMURN851160391W470924N0085427EY 042350ROLSAN851160406W471723N0085321EY 042705KUDESDCT160431W473115N0085126EN
044840DCT160597V490001N0083550E76N 045435DCT75623V491355N0083323E88N
050205EDFM3650A492821N0083051EN23032500LI040545NAS443151N0111749E460244N0090341E11600267
032500LIMMFIR040545FIR443151N0111749E460244N0090341E11600267 032500LIPECR033115ES443151N0111749E443113N0110030E194023
032500LIPECTR033115AUA443151N0111749E443113N0110030E194023 033115LIPPADS033735ES443113N0110030E443029N0104009E941602350
033115LIPPC1X033735ES443113N0110030E443029N0104009E941602350 033115LIPPCTA033735AUA443113N0110030E443029N0104009E941602350
033735LIMMECTA034805AUA443029N0104009E450310N0100300E16016050131 033735LIMMES1034805ES443029N0104009E450310N0100300E16016050131
033735LIMMES1X034805ES443029N0104009E450310N0100300E16016050131 034635LIMMR60041420ES445759N0100829E463827N0085842E160160119333
034805LIMMACTA040730AUA450310N0100300E460935N0090234E160160131280 034805LIMMADE035640ES450310N0100300E453126N0093244E160160131197
035640LIMMANE040730ES453126N0093244E460935N0090234E160160197280 040545LS042705NAS460244N0090341E473115N0085126E160160267431
040545LSASFIR042705FIR460244N0090341E473115N0085126E160160267431 040730LSAZCTA042705AUA460935N0090234E473115N0085126E160160280431
040730LSAZSSL042420ES460935N0090234E471936N0085303E160160280410 041545LSTSA50P042020CRSA464419N0085754E470300N0085520E160160344379
041545LSTSA52P041620ERSA464419N0085754E464627N0085736E160160344348 041620LSTSA51P042020ERSA464627N0085736E470300N0085520E160160348379
042020LSTSA40P042115ERSA470300N0085520E470644N0085449E160160379386
042420LSAZESL042705ES471936N0085303E473115N0085126E1601604104310344157065F160N02340 F140N023493 F160N023498 F150N0234390
F100N023439778032200LIPELUPOS5N10A443151N0111749EY 032540DCT6014V443128N0110716E25Y 032730DCT6022V443115N0110115E39Y
032800DCT6824V443111N0105944E42Y 032830DCT7027V443106N0105729E47Y 032845DCT7528V443105N0105644E49Y 032855DCT7829V443103N0105558E51Y
032910DCT8030V443102N0105513E53Y 032925DCT8032V443058N0105343E56Y 032955DCT8834V443055N0105212E60Y 033035DCT10037V443050N0104957E65Y
033040DCT10038V443048N0104912E67Y 033050DCT10439V443047N0104826E68Y 033110DCT10640V443045N0104741E70Y 033150DCT10644V443038N0104441E77Y
033155DCT11045V443037N0104355E79Y 033215LUPOSL99511057W443017N0103453EY 033240DCT11071V443638N0102907E33Y
033245DCT11472V443705N0102843E36Y 033310DCT12074V443800N0102753E40Y 033335DCT12078V443948N0102615E50Y 033345DCT12479V444016N0102550E52Y
033410DCT12880V444043N0102525E55Y 033445DCT12883V444205N0102411E62Y 033500DCT13084V444232N0102346E64Y 033515DCT13087V444353N0102232E71Y
033540DCT13789V444448N0102143E76Y 033600DCT14090V444515N0102118E79Y 033620DCT14092V444609N0102029E83Y 033640DCT14493V444637N0102004E86Y
033700DCT14094V444704N0101939E88Y 033740DCT14098V444853N0101801E98Y 033755PARL99514499N444920N0101736EY
034015DCT144120V445825N0100802E75Y 034110MISPOL995145127W450126N0100450EY 034200DCT145134V450427N0100138E17Y
034215DCT150135V450452N0100111E19Y 034250DCT150140V450702N0095854E31Y 034325DCT154142V450753N0095759E36Y
034405DCT160145V450911N0095637E43Y 034425DCT160148V451028N0095515E50Y 034520DCT160155V451329N0095203E67Y
034625DCT160162V451629N0094852E83Y 034720BEKANL995160169W451930N0094540EY 035145TZOL995160202N453333N0093026EY
035700DCT160242V455107N0091224E69Y 035925PEPAGN851160260W455902N0090417EY 040205ABESIN851160280W460935N0090234EY
040715DCT160319V463052N0085943E80Y 040840PIXOSN851160329W463619N0085859EY 041315SOPERN851160361W465322N0085640EY
041720DCT160390V470852N0085431E97Y 041730ELMURN851157391W470924N0085427EY 041755DCT150393V471028N0085418E13Y
041820DCT150397V471236N0085401E40Y 041920DCT150405V471651N0085325E93Y 041935ROLSAN851147406W471723N0085321EY
042000DCT140408V471830N0085312E8Y 042125DCT140419V472436N0085221E52Y 042205DCT140425V472755N0085154E76Y
042225DCT134427V472902N0085144E84Y 042240DCT130428V472935N0085140E88Y 042320KUDESN851121431W473115N0085126EN
042435DCT100437V473343N0085439E21N 042720ROMIRN851100459W474247N0090628EN 042825VEDOKN851100468W474724N0090714EN
042905TINOXDCT100473W475007N0090740EY 044335DCT100571G484048N0084511EY 045005DCT100607V485957N0083916E68Y
045040DCT94609V490101N0083856E72Y 045100DCT94611V490205N0083836E75Y 045140DCT84614V490341N0083807E81Y 045200DCT84616V490445N0083747E85Y
045240DCT74619V490620N0083717E91Y 045345INKAMDCT54624W490900N0083628EY 045655DCT54642V491820N0083258E56Y
045950DCT16656G492536N0083015EY 050110EDFM3661A492821N0083051EY39032200LI040020NAS443151N0111749E460244N0090341E11600267
032200LIMMFIR040020FIR443151N0111749E460244N0090341E11600267 032200LIPECR033020ES443151N0111749E443052N0105042E196036
032200LIPECTR033020AUA443151N0111749E443052N0105042E196036 033020LIPPADS033205ES443052N0105042E443029N0104009E961103650
033020LIPPC1X033205ES443052N0105042E443029N0104009E961103650 033020LIPPCTA033205AUA443052N0105042E443029N0104009E961103650
033205LIMMECTA034140AUA443029N0104009E450310N0100300E11014550131 033205LIMMES1034140ES443029N0104009E450310N0100300E11014550131
4D TRAJECTORY DATA PROFILES
Tactical flight Models
bull FTFM - Filed Tactical Flight Model The FTFM is the
ldquoinitialrdquo profile as it reflects the status of the demand before
activation of the regulation plan It is computed with the latest
flight plan version sent by each AO to the CFMUIFPS
bull RTFM - Regulated Tactical Flight Model The RTFM is the
ldquoregulatedrdquo profile as it reflects the status of the demand after
activation of the regulation plan It is computed with the latest
ATFM slot (CTOT) issued to the AO by the ground
regulation system
bull CTFM - Current Tactical Flight Model The CTFM is the
ldquoactualrdquo profile as it integrates the actual entry time of the
flights in the regulated TV It is computed with the Radar
Data sent by ACCs to CFMUETFMS ref
CPG_GEN - Profiles generated by the CFMU path generation
tool
bull SCR - Shortest Constrained Route
bull SRR - Shortest RAD restriction applied Route
bull SUR - Shortest Unconstrained Route
bull DCT - Direct route
CPF - Correlated Position reports for a Flight CPRs
(Correlated Position Reports) which are surveillance data
collected from the ACCs
Filed Flight Plan
CDM
Header
Point Profile
Airspace Profile
Circle Intersection
Profile
RTFM Profile
CTFM Profile
CFP Profile
FTFM Profile
4D TRAJECTORY DATA PROFILES
Current Tactical Flight Model (CTFM) is computed with Radar Data sent by
Area Control Centers to CFMUETFMS so it can be deemed as a fused
version of FTFM with real data
ENHANCED TACTICAL FLOW MANAGEMENT SYSTEM (ETFMS) EUROCONTROL 2013
DATA TYPES
bull Base of Aircraft Data (BADA) depending on ac type
ndash Nominal control variables (BADA 3)
ndash Full flight variable envelope (BADA 4)
bull optimization
Aircraft
Performance
Data
AIRCRAFT EQUATION OF MOTION
bull equation of motion sufficient in 3 dof
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
number of parameters of the system that may vary independently
BASE OF AIRCRAFT DATA (BADA)
bull There are two families of BADA APM based on the same modelling approach and components [EUROCONTROL]
bull BADA Family 3ndash providing a 90 coverage of the current aircraft types operating
in the ECAC airspace
ndash model aircraft behaviour over the normal operations part of the flight envelope and to meet todays requirements for aircraft performance modelling and simulation
bull BADA Family 4 ndash a newly developed model intended to meet advanced functional
and precision requirements of the new ATM systems
ndash providing a 60 coverage of the current aircraft types operating in ECAC airspace
ndash BADA 4 provides accurate modelling of aircraft over the entire flight envelope and enables modelling and simulation of advanced concepts of future systems
AIRCRAFT PERFORMANCE MODEL
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
BADA AIRCRAFT LIMITATION MODEL
DATA TYPES
bull Business objectives
ndash Cost Index
ndash User Preferences Model (UPM)
ndash Ground delays due to connectionshellip
Business Rules
euro
HORIZONTAL OPTIMISATION
TO_WPT FROM_WPT Cost
A
B
C
DEP
DEP
DEP
21
25
23
A
A
E
B
52
40
CG 45
B
B
E
F
49
53
G
G
F
J
73
79
E
E
K
H
84
75
F
F
H
I
70
67
I
I
L
M
96
85
HL 86
JM 119
KO 117
KL 109
MQ 115
LP 118
QDEST 134
OP 136
PDEST 130
Worklist
Dijkstra algorithm
DEPDEST
16
40
19
12
19
J
28
34
I14
17
O33
25
Q30
P32
F24
28
D
E
19
31
G22
A
B
C
2125
23
H
K
35
26 L
M18
29
1) Selection of segments for current from- waypoint
2) Calculation of costs for selected segments
3) Entering calculated datasets into worklist
4) Selection of best dataset from worklist
5) To- waypoint of best dataset becomes from- waypoint
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
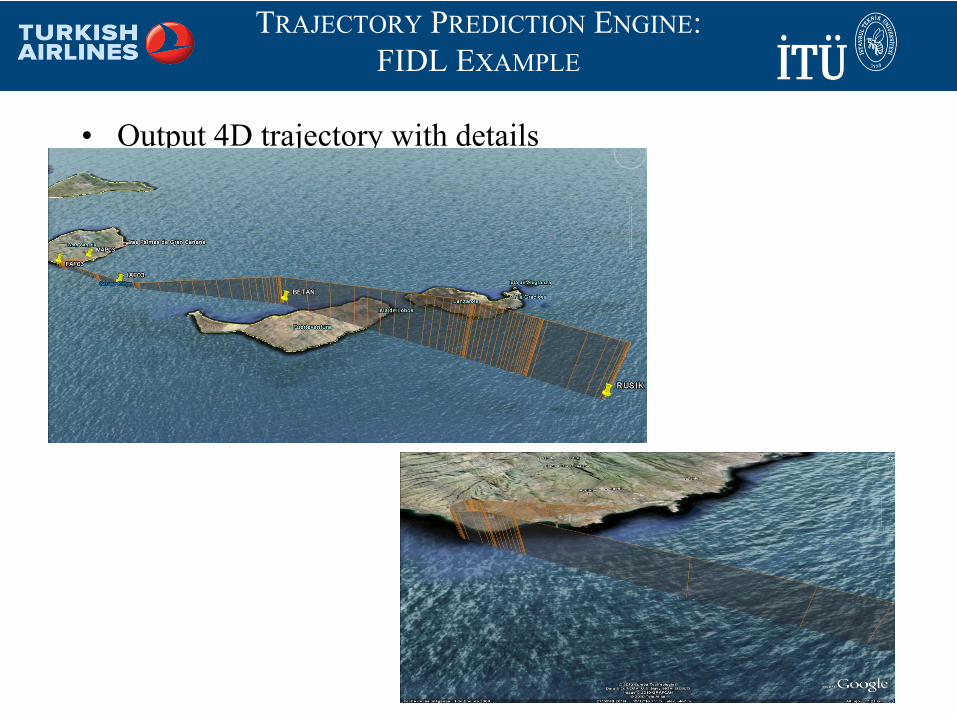
TRAJECTORY PREDICTION ENGINE
FIDL EXAMPLE
bull Output 4D trajectory with details
DATA TYPES
bull Flight Plan
bull Regulated Flight Plan
bull Actual Flight data (Current Tactical)
bull Correlated Position data
bull CDM related data
Basic Flight
Data amp
Schedule
4D TRAJECTORY DATA PROFILES
LIPEEDFMJMP803JMPD22820110301031200BB9377945220110301031500FPLFPLAFPNEXENEXENNN2011030103150020110301031500TEFINS783849NNN00ACHN
NNN600300N00N0NDCULTNRSNNK00344154791F160N0234019032500LIPELUPOS5N10A443151N0111749EY
032955DCT7518V443121N0110416E32Y 033515DCT15038V443048N0104912E67Y 033640DCT16043V443040N0104526E75Y
033830LUPOSL99516057W443017N0103453EY 034355PARL99516099N444920N0101736EY 034735MISPOL995160127W450126N0100450EY
035305BEKANL995160169W451930N0094540EY 035720TZOL995160202N453333N0093026EY 040450PEPAGN851160260W455902N0090417EY
040730ABESIN851160280W460935N0090234EY 041350PIXOSN851160329W463619N0085859EY 041800SOPERN851160361W465322N0085640EY
042155ELMURN851160391W470924N0085427EY 042350ROLSAN851160406W471723N0085321EY 042705KUDESDCT160431W473115N0085126EN
044840DCT160597V490001N0083550E76N 045435DCT75623V491355N0083323E88N
050205EDFM3650A492821N0083051EN23032500LI040545NAS443151N0111749E460244N0090341E11600267
032500LIMMFIR040545FIR443151N0111749E460244N0090341E11600267 032500LIPECR033115ES443151N0111749E443113N0110030E194023
032500LIPECTR033115AUA443151N0111749E443113N0110030E194023 033115LIPPADS033735ES443113N0110030E443029N0104009E941602350
033115LIPPC1X033735ES443113N0110030E443029N0104009E941602350 033115LIPPCTA033735AUA443113N0110030E443029N0104009E941602350
033735LIMMECTA034805AUA443029N0104009E450310N0100300E16016050131 033735LIMMES1034805ES443029N0104009E450310N0100300E16016050131
033735LIMMES1X034805ES443029N0104009E450310N0100300E16016050131 034635LIMMR60041420ES445759N0100829E463827N0085842E160160119333
034805LIMMACTA040730AUA450310N0100300E460935N0090234E160160131280 034805LIMMADE035640ES450310N0100300E453126N0093244E160160131197
035640LIMMANE040730ES453126N0093244E460935N0090234E160160197280 040545LS042705NAS460244N0090341E473115N0085126E160160267431
040545LSASFIR042705FIR460244N0090341E473115N0085126E160160267431 040730LSAZCTA042705AUA460935N0090234E473115N0085126E160160280431
040730LSAZSSL042420ES460935N0090234E471936N0085303E160160280410 041545LSTSA50P042020CRSA464419N0085754E470300N0085520E160160344379
041545LSTSA52P041620ERSA464419N0085754E464627N0085736E160160344348 041620LSTSA51P042020ERSA464627N0085736E470300N0085520E160160348379
042020LSTSA40P042115ERSA470300N0085520E470644N0085449E160160379386
042420LSAZESL042705ES471936N0085303E473115N0085126E1601604104310344157065F160N02340 F140N023493 F160N023498 F150N0234390
F100N023439778032200LIPELUPOS5N10A443151N0111749EY 032540DCT6014V443128N0110716E25Y 032730DCT6022V443115N0110115E39Y
032800DCT6824V443111N0105944E42Y 032830DCT7027V443106N0105729E47Y 032845DCT7528V443105N0105644E49Y 032855DCT7829V443103N0105558E51Y
032910DCT8030V443102N0105513E53Y 032925DCT8032V443058N0105343E56Y 032955DCT8834V443055N0105212E60Y 033035DCT10037V443050N0104957E65Y
033040DCT10038V443048N0104912E67Y 033050DCT10439V443047N0104826E68Y 033110DCT10640V443045N0104741E70Y 033150DCT10644V443038N0104441E77Y
033155DCT11045V443037N0104355E79Y 033215LUPOSL99511057W443017N0103453EY 033240DCT11071V443638N0102907E33Y
033245DCT11472V443705N0102843E36Y 033310DCT12074V443800N0102753E40Y 033335DCT12078V443948N0102615E50Y 033345DCT12479V444016N0102550E52Y
033410DCT12880V444043N0102525E55Y 033445DCT12883V444205N0102411E62Y 033500DCT13084V444232N0102346E64Y 033515DCT13087V444353N0102232E71Y
033540DCT13789V444448N0102143E76Y 033600DCT14090V444515N0102118E79Y 033620DCT14092V444609N0102029E83Y 033640DCT14493V444637N0102004E86Y
033700DCT14094V444704N0101939E88Y 033740DCT14098V444853N0101801E98Y 033755PARL99514499N444920N0101736EY
034015DCT144120V445825N0100802E75Y 034110MISPOL995145127W450126N0100450EY 034200DCT145134V450427N0100138E17Y
034215DCT150135V450452N0100111E19Y 034250DCT150140V450702N0095854E31Y 034325DCT154142V450753N0095759E36Y
034405DCT160145V450911N0095637E43Y 034425DCT160148V451028N0095515E50Y 034520DCT160155V451329N0095203E67Y
034625DCT160162V451629N0094852E83Y 034720BEKANL995160169W451930N0094540EY 035145TZOL995160202N453333N0093026EY
035700DCT160242V455107N0091224E69Y 035925PEPAGN851160260W455902N0090417EY 040205ABESIN851160280W460935N0090234EY
040715DCT160319V463052N0085943E80Y 040840PIXOSN851160329W463619N0085859EY 041315SOPERN851160361W465322N0085640EY
041720DCT160390V470852N0085431E97Y 041730ELMURN851157391W470924N0085427EY 041755DCT150393V471028N0085418E13Y
041820DCT150397V471236N0085401E40Y 041920DCT150405V471651N0085325E93Y 041935ROLSAN851147406W471723N0085321EY
042000DCT140408V471830N0085312E8Y 042125DCT140419V472436N0085221E52Y 042205DCT140425V472755N0085154E76Y
042225DCT134427V472902N0085144E84Y 042240DCT130428V472935N0085140E88Y 042320KUDESN851121431W473115N0085126EN
042435DCT100437V473343N0085439E21N 042720ROMIRN851100459W474247N0090628EN 042825VEDOKN851100468W474724N0090714EN
042905TINOXDCT100473W475007N0090740EY 044335DCT100571G484048N0084511EY 045005DCT100607V485957N0083916E68Y
045040DCT94609V490101N0083856E72Y 045100DCT94611V490205N0083836E75Y 045140DCT84614V490341N0083807E81Y 045200DCT84616V490445N0083747E85Y
045240DCT74619V490620N0083717E91Y 045345INKAMDCT54624W490900N0083628EY 045655DCT54642V491820N0083258E56Y
045950DCT16656G492536N0083015EY 050110EDFM3661A492821N0083051EY39032200LI040020NAS443151N0111749E460244N0090341E11600267
032200LIMMFIR040020FIR443151N0111749E460244N0090341E11600267 032200LIPECR033020ES443151N0111749E443052N0105042E196036
032200LIPECTR033020AUA443151N0111749E443052N0105042E196036 033020LIPPADS033205ES443052N0105042E443029N0104009E961103650
033020LIPPC1X033205ES443052N0105042E443029N0104009E961103650 033020LIPPCTA033205AUA443052N0105042E443029N0104009E961103650
033205LIMMECTA034140AUA443029N0104009E450310N0100300E11014550131 033205LIMMES1034140ES443029N0104009E450310N0100300E11014550131
4D TRAJECTORY DATA PROFILES
Tactical flight Models
bull FTFM - Filed Tactical Flight Model The FTFM is the
ldquoinitialrdquo profile as it reflects the status of the demand before
activation of the regulation plan It is computed with the latest
flight plan version sent by each AO to the CFMUIFPS
bull RTFM - Regulated Tactical Flight Model The RTFM is the
ldquoregulatedrdquo profile as it reflects the status of the demand after
activation of the regulation plan It is computed with the latest
ATFM slot (CTOT) issued to the AO by the ground
regulation system
bull CTFM - Current Tactical Flight Model The CTFM is the
ldquoactualrdquo profile as it integrates the actual entry time of the
flights in the regulated TV It is computed with the Radar
Data sent by ACCs to CFMUETFMS ref
CPG_GEN - Profiles generated by the CFMU path generation
tool
bull SCR - Shortest Constrained Route
bull SRR - Shortest RAD restriction applied Route
bull SUR - Shortest Unconstrained Route
bull DCT - Direct route
CPF - Correlated Position reports for a Flight CPRs
(Correlated Position Reports) which are surveillance data
collected from the ACCs
Filed Flight Plan
CDM
Header
Point Profile
Airspace Profile
Circle Intersection
Profile
RTFM Profile
CTFM Profile
CFP Profile
FTFM Profile
4D TRAJECTORY DATA PROFILES
Current Tactical Flight Model (CTFM) is computed with Radar Data sent by
Area Control Centers to CFMUETFMS so it can be deemed as a fused
version of FTFM with real data
ENHANCED TACTICAL FLOW MANAGEMENT SYSTEM (ETFMS) EUROCONTROL 2013
DATA TYPES
bull Base of Aircraft Data (BADA) depending on ac type
ndash Nominal control variables (BADA 3)
ndash Full flight variable envelope (BADA 4)
bull optimization
Aircraft
Performance
Data
AIRCRAFT EQUATION OF MOTION
bull equation of motion sufficient in 3 dof
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
number of parameters of the system that may vary independently
BASE OF AIRCRAFT DATA (BADA)
bull There are two families of BADA APM based on the same modelling approach and components [EUROCONTROL]
bull BADA Family 3ndash providing a 90 coverage of the current aircraft types operating
in the ECAC airspace
ndash model aircraft behaviour over the normal operations part of the flight envelope and to meet todays requirements for aircraft performance modelling and simulation
bull BADA Family 4 ndash a newly developed model intended to meet advanced functional
and precision requirements of the new ATM systems
ndash providing a 60 coverage of the current aircraft types operating in ECAC airspace
ndash BADA 4 provides accurate modelling of aircraft over the entire flight envelope and enables modelling and simulation of advanced concepts of future systems
AIRCRAFT PERFORMANCE MODEL
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
BADA AIRCRAFT LIMITATION MODEL
DATA TYPES
bull Business objectives
ndash Cost Index
ndash User Preferences Model (UPM)
ndash Ground delays due to connectionshellip
Business Rules
euro
HORIZONTAL OPTIMISATION
TO_WPT FROM_WPT Cost
A
B
C
DEP
DEP
DEP
21
25
23
A
A
E
B
52
40
CG 45
B
B
E
F
49
53
G
G
F
J
73
79
E
E
K
H
84
75
F
F
H
I
70
67
I
I
L
M
96
85
HL 86
JM 119
KO 117
KL 109
MQ 115
LP 118
QDEST 134
OP 136
PDEST 130
Worklist
Dijkstra algorithm
DEPDEST
16
40
19
12
19
J
28
34
I14
17
O33
25
Q30
P32
F24
28
D
E
19
31
G22
A
B
C
2125
23
H
K
35
26 L
M18
29
1) Selection of segments for current from- waypoint
2) Calculation of costs for selected segments
3) Entering calculated datasets into worklist
4) Selection of best dataset from worklist
5) To- waypoint of best dataset becomes from- waypoint
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
DATA TYPES
bull Flight Plan
bull Regulated Flight Plan
bull Actual Flight data (Current Tactical)
bull Correlated Position data
bull CDM related data
Basic Flight
Data amp
Schedule
4D TRAJECTORY DATA PROFILES
LIPEEDFMJMP803JMPD22820110301031200BB9377945220110301031500FPLFPLAFPNEXENEXENNN2011030103150020110301031500TEFINS783849NNN00ACHN
NNN600300N00N0NDCULTNRSNNK00344154791F160N0234019032500LIPELUPOS5N10A443151N0111749EY
032955DCT7518V443121N0110416E32Y 033515DCT15038V443048N0104912E67Y 033640DCT16043V443040N0104526E75Y
033830LUPOSL99516057W443017N0103453EY 034355PARL99516099N444920N0101736EY 034735MISPOL995160127W450126N0100450EY
035305BEKANL995160169W451930N0094540EY 035720TZOL995160202N453333N0093026EY 040450PEPAGN851160260W455902N0090417EY
040730ABESIN851160280W460935N0090234EY 041350PIXOSN851160329W463619N0085859EY 041800SOPERN851160361W465322N0085640EY
042155ELMURN851160391W470924N0085427EY 042350ROLSAN851160406W471723N0085321EY 042705KUDESDCT160431W473115N0085126EN
044840DCT160597V490001N0083550E76N 045435DCT75623V491355N0083323E88N
050205EDFM3650A492821N0083051EN23032500LI040545NAS443151N0111749E460244N0090341E11600267
032500LIMMFIR040545FIR443151N0111749E460244N0090341E11600267 032500LIPECR033115ES443151N0111749E443113N0110030E194023
032500LIPECTR033115AUA443151N0111749E443113N0110030E194023 033115LIPPADS033735ES443113N0110030E443029N0104009E941602350
033115LIPPC1X033735ES443113N0110030E443029N0104009E941602350 033115LIPPCTA033735AUA443113N0110030E443029N0104009E941602350
033735LIMMECTA034805AUA443029N0104009E450310N0100300E16016050131 033735LIMMES1034805ES443029N0104009E450310N0100300E16016050131
033735LIMMES1X034805ES443029N0104009E450310N0100300E16016050131 034635LIMMR60041420ES445759N0100829E463827N0085842E160160119333
034805LIMMACTA040730AUA450310N0100300E460935N0090234E160160131280 034805LIMMADE035640ES450310N0100300E453126N0093244E160160131197
035640LIMMANE040730ES453126N0093244E460935N0090234E160160197280 040545LS042705NAS460244N0090341E473115N0085126E160160267431
040545LSASFIR042705FIR460244N0090341E473115N0085126E160160267431 040730LSAZCTA042705AUA460935N0090234E473115N0085126E160160280431
040730LSAZSSL042420ES460935N0090234E471936N0085303E160160280410 041545LSTSA50P042020CRSA464419N0085754E470300N0085520E160160344379
041545LSTSA52P041620ERSA464419N0085754E464627N0085736E160160344348 041620LSTSA51P042020ERSA464627N0085736E470300N0085520E160160348379
042020LSTSA40P042115ERSA470300N0085520E470644N0085449E160160379386
042420LSAZESL042705ES471936N0085303E473115N0085126E1601604104310344157065F160N02340 F140N023493 F160N023498 F150N0234390
F100N023439778032200LIPELUPOS5N10A443151N0111749EY 032540DCT6014V443128N0110716E25Y 032730DCT6022V443115N0110115E39Y
032800DCT6824V443111N0105944E42Y 032830DCT7027V443106N0105729E47Y 032845DCT7528V443105N0105644E49Y 032855DCT7829V443103N0105558E51Y
032910DCT8030V443102N0105513E53Y 032925DCT8032V443058N0105343E56Y 032955DCT8834V443055N0105212E60Y 033035DCT10037V443050N0104957E65Y
033040DCT10038V443048N0104912E67Y 033050DCT10439V443047N0104826E68Y 033110DCT10640V443045N0104741E70Y 033150DCT10644V443038N0104441E77Y
033155DCT11045V443037N0104355E79Y 033215LUPOSL99511057W443017N0103453EY 033240DCT11071V443638N0102907E33Y
033245DCT11472V443705N0102843E36Y 033310DCT12074V443800N0102753E40Y 033335DCT12078V443948N0102615E50Y 033345DCT12479V444016N0102550E52Y
033410DCT12880V444043N0102525E55Y 033445DCT12883V444205N0102411E62Y 033500DCT13084V444232N0102346E64Y 033515DCT13087V444353N0102232E71Y
033540DCT13789V444448N0102143E76Y 033600DCT14090V444515N0102118E79Y 033620DCT14092V444609N0102029E83Y 033640DCT14493V444637N0102004E86Y
033700DCT14094V444704N0101939E88Y 033740DCT14098V444853N0101801E98Y 033755PARL99514499N444920N0101736EY
034015DCT144120V445825N0100802E75Y 034110MISPOL995145127W450126N0100450EY 034200DCT145134V450427N0100138E17Y
034215DCT150135V450452N0100111E19Y 034250DCT150140V450702N0095854E31Y 034325DCT154142V450753N0095759E36Y
034405DCT160145V450911N0095637E43Y 034425DCT160148V451028N0095515E50Y 034520DCT160155V451329N0095203E67Y
034625DCT160162V451629N0094852E83Y 034720BEKANL995160169W451930N0094540EY 035145TZOL995160202N453333N0093026EY
035700DCT160242V455107N0091224E69Y 035925PEPAGN851160260W455902N0090417EY 040205ABESIN851160280W460935N0090234EY
040715DCT160319V463052N0085943E80Y 040840PIXOSN851160329W463619N0085859EY 041315SOPERN851160361W465322N0085640EY
041720DCT160390V470852N0085431E97Y 041730ELMURN851157391W470924N0085427EY 041755DCT150393V471028N0085418E13Y
041820DCT150397V471236N0085401E40Y 041920DCT150405V471651N0085325E93Y 041935ROLSAN851147406W471723N0085321EY
042000DCT140408V471830N0085312E8Y 042125DCT140419V472436N0085221E52Y 042205DCT140425V472755N0085154E76Y
042225DCT134427V472902N0085144E84Y 042240DCT130428V472935N0085140E88Y 042320KUDESN851121431W473115N0085126EN
042435DCT100437V473343N0085439E21N 042720ROMIRN851100459W474247N0090628EN 042825VEDOKN851100468W474724N0090714EN
042905TINOXDCT100473W475007N0090740EY 044335DCT100571G484048N0084511EY 045005DCT100607V485957N0083916E68Y
045040DCT94609V490101N0083856E72Y 045100DCT94611V490205N0083836E75Y 045140DCT84614V490341N0083807E81Y 045200DCT84616V490445N0083747E85Y
045240DCT74619V490620N0083717E91Y 045345INKAMDCT54624W490900N0083628EY 045655DCT54642V491820N0083258E56Y
045950DCT16656G492536N0083015EY 050110EDFM3661A492821N0083051EY39032200LI040020NAS443151N0111749E460244N0090341E11600267
032200LIMMFIR040020FIR443151N0111749E460244N0090341E11600267 032200LIPECR033020ES443151N0111749E443052N0105042E196036
032200LIPECTR033020AUA443151N0111749E443052N0105042E196036 033020LIPPADS033205ES443052N0105042E443029N0104009E961103650
033020LIPPC1X033205ES443052N0105042E443029N0104009E961103650 033020LIPPCTA033205AUA443052N0105042E443029N0104009E961103650
033205LIMMECTA034140AUA443029N0104009E450310N0100300E11014550131 033205LIMMES1034140ES443029N0104009E450310N0100300E11014550131
4D TRAJECTORY DATA PROFILES
Tactical flight Models
bull FTFM - Filed Tactical Flight Model The FTFM is the
ldquoinitialrdquo profile as it reflects the status of the demand before
activation of the regulation plan It is computed with the latest
flight plan version sent by each AO to the CFMUIFPS
bull RTFM - Regulated Tactical Flight Model The RTFM is the
ldquoregulatedrdquo profile as it reflects the status of the demand after
activation of the regulation plan It is computed with the latest
ATFM slot (CTOT) issued to the AO by the ground
regulation system
bull CTFM - Current Tactical Flight Model The CTFM is the
ldquoactualrdquo profile as it integrates the actual entry time of the
flights in the regulated TV It is computed with the Radar
Data sent by ACCs to CFMUETFMS ref
CPG_GEN - Profiles generated by the CFMU path generation
tool
bull SCR - Shortest Constrained Route
bull SRR - Shortest RAD restriction applied Route
bull SUR - Shortest Unconstrained Route
bull DCT - Direct route
CPF - Correlated Position reports for a Flight CPRs
(Correlated Position Reports) which are surveillance data
collected from the ACCs
Filed Flight Plan
CDM
Header
Point Profile
Airspace Profile
Circle Intersection
Profile
RTFM Profile
CTFM Profile
CFP Profile
FTFM Profile
4D TRAJECTORY DATA PROFILES
Current Tactical Flight Model (CTFM) is computed with Radar Data sent by
Area Control Centers to CFMUETFMS so it can be deemed as a fused
version of FTFM with real data
ENHANCED TACTICAL FLOW MANAGEMENT SYSTEM (ETFMS) EUROCONTROL 2013
DATA TYPES
bull Base of Aircraft Data (BADA) depending on ac type
ndash Nominal control variables (BADA 3)
ndash Full flight variable envelope (BADA 4)
bull optimization
Aircraft
Performance
Data
AIRCRAFT EQUATION OF MOTION
bull equation of motion sufficient in 3 dof
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
number of parameters of the system that may vary independently
BASE OF AIRCRAFT DATA (BADA)
bull There are two families of BADA APM based on the same modelling approach and components [EUROCONTROL]
bull BADA Family 3ndash providing a 90 coverage of the current aircraft types operating
in the ECAC airspace
ndash model aircraft behaviour over the normal operations part of the flight envelope and to meet todays requirements for aircraft performance modelling and simulation
bull BADA Family 4 ndash a newly developed model intended to meet advanced functional
and precision requirements of the new ATM systems
ndash providing a 60 coverage of the current aircraft types operating in ECAC airspace
ndash BADA 4 provides accurate modelling of aircraft over the entire flight envelope and enables modelling and simulation of advanced concepts of future systems
AIRCRAFT PERFORMANCE MODEL
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
BADA AIRCRAFT LIMITATION MODEL
DATA TYPES
bull Business objectives
ndash Cost Index
ndash User Preferences Model (UPM)
ndash Ground delays due to connectionshellip
Business Rules
euro
HORIZONTAL OPTIMISATION
TO_WPT FROM_WPT Cost
A
B
C
DEP
DEP
DEP
21
25
23
A
A
E
B
52
40
CG 45
B
B
E
F
49
53
G
G
F
J
73
79
E
E
K
H
84
75
F
F
H
I
70
67
I
I
L
M
96
85
HL 86
JM 119
KO 117
KL 109
MQ 115
LP 118
QDEST 134
OP 136
PDEST 130
Worklist
Dijkstra algorithm
DEPDEST
16
40
19
12
19
J
28
34
I14
17
O33
25
Q30
P32
F24
28
D
E
19
31
G22
A
B
C
2125
23
H
K
35
26 L
M18
29
1) Selection of segments for current from- waypoint
2) Calculation of costs for selected segments
3) Entering calculated datasets into worklist
4) Selection of best dataset from worklist
5) To- waypoint of best dataset becomes from- waypoint
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
4D TRAJECTORY DATA PROFILES
LIPEEDFMJMP803JMPD22820110301031200BB9377945220110301031500FPLFPLAFPNEXENEXENNN2011030103150020110301031500TEFINS783849NNN00ACHN
NNN600300N00N0NDCULTNRSNNK00344154791F160N0234019032500LIPELUPOS5N10A443151N0111749EY
032955DCT7518V443121N0110416E32Y 033515DCT15038V443048N0104912E67Y 033640DCT16043V443040N0104526E75Y
033830LUPOSL99516057W443017N0103453EY 034355PARL99516099N444920N0101736EY 034735MISPOL995160127W450126N0100450EY
035305BEKANL995160169W451930N0094540EY 035720TZOL995160202N453333N0093026EY 040450PEPAGN851160260W455902N0090417EY
040730ABESIN851160280W460935N0090234EY 041350PIXOSN851160329W463619N0085859EY 041800SOPERN851160361W465322N0085640EY
042155ELMURN851160391W470924N0085427EY 042350ROLSAN851160406W471723N0085321EY 042705KUDESDCT160431W473115N0085126EN
044840DCT160597V490001N0083550E76N 045435DCT75623V491355N0083323E88N
050205EDFM3650A492821N0083051EN23032500LI040545NAS443151N0111749E460244N0090341E11600267
032500LIMMFIR040545FIR443151N0111749E460244N0090341E11600267 032500LIPECR033115ES443151N0111749E443113N0110030E194023
032500LIPECTR033115AUA443151N0111749E443113N0110030E194023 033115LIPPADS033735ES443113N0110030E443029N0104009E941602350
033115LIPPC1X033735ES443113N0110030E443029N0104009E941602350 033115LIPPCTA033735AUA443113N0110030E443029N0104009E941602350
033735LIMMECTA034805AUA443029N0104009E450310N0100300E16016050131 033735LIMMES1034805ES443029N0104009E450310N0100300E16016050131
033735LIMMES1X034805ES443029N0104009E450310N0100300E16016050131 034635LIMMR60041420ES445759N0100829E463827N0085842E160160119333
034805LIMMACTA040730AUA450310N0100300E460935N0090234E160160131280 034805LIMMADE035640ES450310N0100300E453126N0093244E160160131197
035640LIMMANE040730ES453126N0093244E460935N0090234E160160197280 040545LS042705NAS460244N0090341E473115N0085126E160160267431
040545LSASFIR042705FIR460244N0090341E473115N0085126E160160267431 040730LSAZCTA042705AUA460935N0090234E473115N0085126E160160280431
040730LSAZSSL042420ES460935N0090234E471936N0085303E160160280410 041545LSTSA50P042020CRSA464419N0085754E470300N0085520E160160344379
041545LSTSA52P041620ERSA464419N0085754E464627N0085736E160160344348 041620LSTSA51P042020ERSA464627N0085736E470300N0085520E160160348379
042020LSTSA40P042115ERSA470300N0085520E470644N0085449E160160379386
042420LSAZESL042705ES471936N0085303E473115N0085126E1601604104310344157065F160N02340 F140N023493 F160N023498 F150N0234390
F100N023439778032200LIPELUPOS5N10A443151N0111749EY 032540DCT6014V443128N0110716E25Y 032730DCT6022V443115N0110115E39Y
032800DCT6824V443111N0105944E42Y 032830DCT7027V443106N0105729E47Y 032845DCT7528V443105N0105644E49Y 032855DCT7829V443103N0105558E51Y
032910DCT8030V443102N0105513E53Y 032925DCT8032V443058N0105343E56Y 032955DCT8834V443055N0105212E60Y 033035DCT10037V443050N0104957E65Y
033040DCT10038V443048N0104912E67Y 033050DCT10439V443047N0104826E68Y 033110DCT10640V443045N0104741E70Y 033150DCT10644V443038N0104441E77Y
033155DCT11045V443037N0104355E79Y 033215LUPOSL99511057W443017N0103453EY 033240DCT11071V443638N0102907E33Y
033245DCT11472V443705N0102843E36Y 033310DCT12074V443800N0102753E40Y 033335DCT12078V443948N0102615E50Y 033345DCT12479V444016N0102550E52Y
033410DCT12880V444043N0102525E55Y 033445DCT12883V444205N0102411E62Y 033500DCT13084V444232N0102346E64Y 033515DCT13087V444353N0102232E71Y
033540DCT13789V444448N0102143E76Y 033600DCT14090V444515N0102118E79Y 033620DCT14092V444609N0102029E83Y 033640DCT14493V444637N0102004E86Y
033700DCT14094V444704N0101939E88Y 033740DCT14098V444853N0101801E98Y 033755PARL99514499N444920N0101736EY
034015DCT144120V445825N0100802E75Y 034110MISPOL995145127W450126N0100450EY 034200DCT145134V450427N0100138E17Y
034215DCT150135V450452N0100111E19Y 034250DCT150140V450702N0095854E31Y 034325DCT154142V450753N0095759E36Y
034405DCT160145V450911N0095637E43Y 034425DCT160148V451028N0095515E50Y 034520DCT160155V451329N0095203E67Y
034625DCT160162V451629N0094852E83Y 034720BEKANL995160169W451930N0094540EY 035145TZOL995160202N453333N0093026EY
035700DCT160242V455107N0091224E69Y 035925PEPAGN851160260W455902N0090417EY 040205ABESIN851160280W460935N0090234EY
040715DCT160319V463052N0085943E80Y 040840PIXOSN851160329W463619N0085859EY 041315SOPERN851160361W465322N0085640EY
041720DCT160390V470852N0085431E97Y 041730ELMURN851157391W470924N0085427EY 041755DCT150393V471028N0085418E13Y
041820DCT150397V471236N0085401E40Y 041920DCT150405V471651N0085325E93Y 041935ROLSAN851147406W471723N0085321EY
042000DCT140408V471830N0085312E8Y 042125DCT140419V472436N0085221E52Y 042205DCT140425V472755N0085154E76Y
042225DCT134427V472902N0085144E84Y 042240DCT130428V472935N0085140E88Y 042320KUDESN851121431W473115N0085126EN
042435DCT100437V473343N0085439E21N 042720ROMIRN851100459W474247N0090628EN 042825VEDOKN851100468W474724N0090714EN
042905TINOXDCT100473W475007N0090740EY 044335DCT100571G484048N0084511EY 045005DCT100607V485957N0083916E68Y
045040DCT94609V490101N0083856E72Y 045100DCT94611V490205N0083836E75Y 045140DCT84614V490341N0083807E81Y 045200DCT84616V490445N0083747E85Y
045240DCT74619V490620N0083717E91Y 045345INKAMDCT54624W490900N0083628EY 045655DCT54642V491820N0083258E56Y
045950DCT16656G492536N0083015EY 050110EDFM3661A492821N0083051EY39032200LI040020NAS443151N0111749E460244N0090341E11600267
032200LIMMFIR040020FIR443151N0111749E460244N0090341E11600267 032200LIPECR033020ES443151N0111749E443052N0105042E196036
032200LIPECTR033020AUA443151N0111749E443052N0105042E196036 033020LIPPADS033205ES443052N0105042E443029N0104009E961103650
033020LIPPC1X033205ES443052N0105042E443029N0104009E961103650 033020LIPPCTA033205AUA443052N0105042E443029N0104009E961103650
033205LIMMECTA034140AUA443029N0104009E450310N0100300E11014550131 033205LIMMES1034140ES443029N0104009E450310N0100300E11014550131
4D TRAJECTORY DATA PROFILES
Tactical flight Models
bull FTFM - Filed Tactical Flight Model The FTFM is the
ldquoinitialrdquo profile as it reflects the status of the demand before
activation of the regulation plan It is computed with the latest
flight plan version sent by each AO to the CFMUIFPS
bull RTFM - Regulated Tactical Flight Model The RTFM is the
ldquoregulatedrdquo profile as it reflects the status of the demand after
activation of the regulation plan It is computed with the latest
ATFM slot (CTOT) issued to the AO by the ground
regulation system
bull CTFM - Current Tactical Flight Model The CTFM is the
ldquoactualrdquo profile as it integrates the actual entry time of the
flights in the regulated TV It is computed with the Radar
Data sent by ACCs to CFMUETFMS ref
CPG_GEN - Profiles generated by the CFMU path generation
tool
bull SCR - Shortest Constrained Route
bull SRR - Shortest RAD restriction applied Route
bull SUR - Shortest Unconstrained Route
bull DCT - Direct route
CPF - Correlated Position reports for a Flight CPRs
(Correlated Position Reports) which are surveillance data
collected from the ACCs
Filed Flight Plan
CDM
Header
Point Profile
Airspace Profile
Circle Intersection
Profile
RTFM Profile
CTFM Profile
CFP Profile
FTFM Profile
4D TRAJECTORY DATA PROFILES
Current Tactical Flight Model (CTFM) is computed with Radar Data sent by
Area Control Centers to CFMUETFMS so it can be deemed as a fused
version of FTFM with real data
ENHANCED TACTICAL FLOW MANAGEMENT SYSTEM (ETFMS) EUROCONTROL 2013
DATA TYPES
bull Base of Aircraft Data (BADA) depending on ac type
ndash Nominal control variables (BADA 3)
ndash Full flight variable envelope (BADA 4)
bull optimization
Aircraft
Performance
Data
AIRCRAFT EQUATION OF MOTION
bull equation of motion sufficient in 3 dof
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
number of parameters of the system that may vary independently
BASE OF AIRCRAFT DATA (BADA)
bull There are two families of BADA APM based on the same modelling approach and components [EUROCONTROL]
bull BADA Family 3ndash providing a 90 coverage of the current aircraft types operating
in the ECAC airspace
ndash model aircraft behaviour over the normal operations part of the flight envelope and to meet todays requirements for aircraft performance modelling and simulation
bull BADA Family 4 ndash a newly developed model intended to meet advanced functional
and precision requirements of the new ATM systems
ndash providing a 60 coverage of the current aircraft types operating in ECAC airspace
ndash BADA 4 provides accurate modelling of aircraft over the entire flight envelope and enables modelling and simulation of advanced concepts of future systems
AIRCRAFT PERFORMANCE MODEL
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
BADA AIRCRAFT LIMITATION MODEL
DATA TYPES
bull Business objectives
ndash Cost Index
ndash User Preferences Model (UPM)
ndash Ground delays due to connectionshellip
Business Rules
euro
HORIZONTAL OPTIMISATION
TO_WPT FROM_WPT Cost
A
B
C
DEP
DEP
DEP
21
25
23
A
A
E
B
52
40
CG 45
B
B
E
F
49
53
G
G
F
J
73
79
E
E
K
H
84
75
F
F
H
I
70
67
I
I
L
M
96
85
HL 86
JM 119
KO 117
KL 109
MQ 115
LP 118
QDEST 134
OP 136
PDEST 130
Worklist
Dijkstra algorithm
DEPDEST
16
40
19
12
19
J
28
34
I14
17
O33
25
Q30
P32
F24
28
D
E
19
31
G22
A
B
C
2125
23
H
K
35
26 L
M18
29
1) Selection of segments for current from- waypoint
2) Calculation of costs for selected segments
3) Entering calculated datasets into worklist
4) Selection of best dataset from worklist
5) To- waypoint of best dataset becomes from- waypoint
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
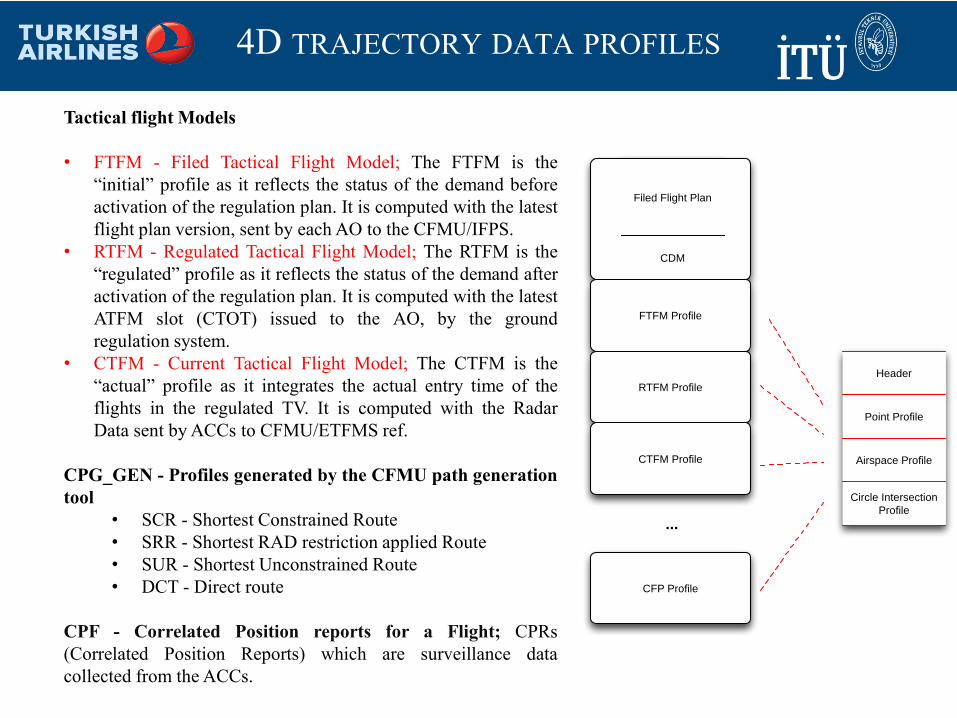
4D TRAJECTORY DATA PROFILES
Tactical flight Models
bull FTFM - Filed Tactical Flight Model The FTFM is the
ldquoinitialrdquo profile as it reflects the status of the demand before
activation of the regulation plan It is computed with the latest
flight plan version sent by each AO to the CFMUIFPS
bull RTFM - Regulated Tactical Flight Model The RTFM is the
ldquoregulatedrdquo profile as it reflects the status of the demand after
activation of the regulation plan It is computed with the latest
ATFM slot (CTOT) issued to the AO by the ground
regulation system
bull CTFM - Current Tactical Flight Model The CTFM is the
ldquoactualrdquo profile as it integrates the actual entry time of the
flights in the regulated TV It is computed with the Radar
Data sent by ACCs to CFMUETFMS ref
CPG_GEN - Profiles generated by the CFMU path generation
tool
bull SCR - Shortest Constrained Route
bull SRR - Shortest RAD restriction applied Route
bull SUR - Shortest Unconstrained Route
bull DCT - Direct route
CPF - Correlated Position reports for a Flight CPRs
(Correlated Position Reports) which are surveillance data
collected from the ACCs
Filed Flight Plan
CDM
Header
Point Profile
Airspace Profile
Circle Intersection
Profile
RTFM Profile
CTFM Profile
CFP Profile
FTFM Profile
4D TRAJECTORY DATA PROFILES
Current Tactical Flight Model (CTFM) is computed with Radar Data sent by
Area Control Centers to CFMUETFMS so it can be deemed as a fused
version of FTFM with real data
ENHANCED TACTICAL FLOW MANAGEMENT SYSTEM (ETFMS) EUROCONTROL 2013
DATA TYPES
bull Base of Aircraft Data (BADA) depending on ac type
ndash Nominal control variables (BADA 3)
ndash Full flight variable envelope (BADA 4)
bull optimization
Aircraft
Performance
Data
AIRCRAFT EQUATION OF MOTION
bull equation of motion sufficient in 3 dof
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
number of parameters of the system that may vary independently
BASE OF AIRCRAFT DATA (BADA)
bull There are two families of BADA APM based on the same modelling approach and components [EUROCONTROL]
bull BADA Family 3ndash providing a 90 coverage of the current aircraft types operating
in the ECAC airspace
ndash model aircraft behaviour over the normal operations part of the flight envelope and to meet todays requirements for aircraft performance modelling and simulation
bull BADA Family 4 ndash a newly developed model intended to meet advanced functional
and precision requirements of the new ATM systems
ndash providing a 60 coverage of the current aircraft types operating in ECAC airspace
ndash BADA 4 provides accurate modelling of aircraft over the entire flight envelope and enables modelling and simulation of advanced concepts of future systems
AIRCRAFT PERFORMANCE MODEL
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
BADA AIRCRAFT LIMITATION MODEL
DATA TYPES
bull Business objectives
ndash Cost Index
ndash User Preferences Model (UPM)
ndash Ground delays due to connectionshellip
Business Rules
euro
HORIZONTAL OPTIMISATION
TO_WPT FROM_WPT Cost
A
B
C
DEP
DEP
DEP
21
25
23
A
A
E
B
52
40
CG 45
B
B
E
F
49
53
G
G
F
J
73
79
E
E
K
H
84
75
F
F
H
I
70
67
I
I
L
M
96
85
HL 86
JM 119
KO 117
KL 109
MQ 115
LP 118
QDEST 134
OP 136
PDEST 130
Worklist
Dijkstra algorithm
DEPDEST
16
40
19
12
19
J
28
34
I14
17
O33
25
Q30
P32
F24
28
D
E
19
31
G22
A
B
C
2125
23
H
K
35
26 L
M18
29
1) Selection of segments for current from- waypoint
2) Calculation of costs for selected segments
3) Entering calculated datasets into worklist
4) Selection of best dataset from worklist
5) To- waypoint of best dataset becomes from- waypoint
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
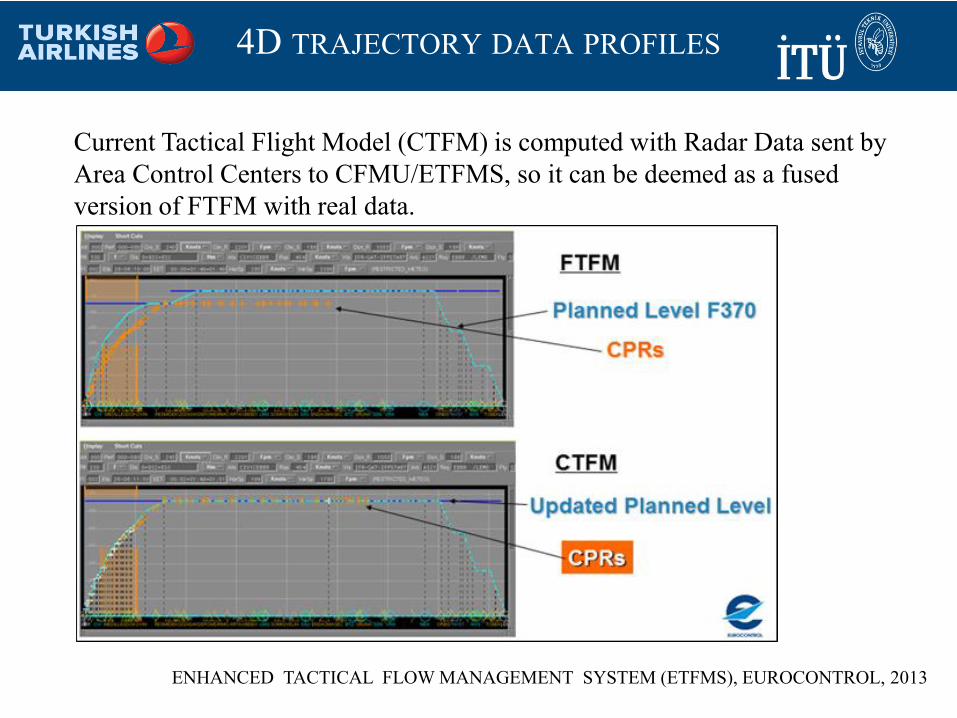
4D TRAJECTORY DATA PROFILES
Current Tactical Flight Model (CTFM) is computed with Radar Data sent by
Area Control Centers to CFMUETFMS so it can be deemed as a fused
version of FTFM with real data
ENHANCED TACTICAL FLOW MANAGEMENT SYSTEM (ETFMS) EUROCONTROL 2013
DATA TYPES
bull Base of Aircraft Data (BADA) depending on ac type
ndash Nominal control variables (BADA 3)
ndash Full flight variable envelope (BADA 4)
bull optimization
Aircraft
Performance
Data
AIRCRAFT EQUATION OF MOTION
bull equation of motion sufficient in 3 dof
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
number of parameters of the system that may vary independently
BASE OF AIRCRAFT DATA (BADA)
bull There are two families of BADA APM based on the same modelling approach and components [EUROCONTROL]
bull BADA Family 3ndash providing a 90 coverage of the current aircraft types operating
in the ECAC airspace
ndash model aircraft behaviour over the normal operations part of the flight envelope and to meet todays requirements for aircraft performance modelling and simulation
bull BADA Family 4 ndash a newly developed model intended to meet advanced functional
and precision requirements of the new ATM systems
ndash providing a 60 coverage of the current aircraft types operating in ECAC airspace
ndash BADA 4 provides accurate modelling of aircraft over the entire flight envelope and enables modelling and simulation of advanced concepts of future systems
AIRCRAFT PERFORMANCE MODEL
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
BADA AIRCRAFT LIMITATION MODEL
DATA TYPES
bull Business objectives
ndash Cost Index
ndash User Preferences Model (UPM)
ndash Ground delays due to connectionshellip
Business Rules
euro
HORIZONTAL OPTIMISATION
TO_WPT FROM_WPT Cost
A
B
C
DEP
DEP
DEP
21
25
23
A
A
E
B
52
40
CG 45
B
B
E
F
49
53
G
G
F
J
73
79
E
E
K
H
84
75
F
F
H
I
70
67
I
I
L
M
96
85
HL 86
JM 119
KO 117
KL 109
MQ 115
LP 118
QDEST 134
OP 136
PDEST 130
Worklist
Dijkstra algorithm
DEPDEST
16
40
19
12
19
J
28
34
I14
17
O33
25
Q30
P32
F24
28
D
E
19
31
G22
A
B
C
2125
23
H
K
35
26 L
M18
29
1) Selection of segments for current from- waypoint
2) Calculation of costs for selected segments
3) Entering calculated datasets into worklist
4) Selection of best dataset from worklist
5) To- waypoint of best dataset becomes from- waypoint
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS

DATA TYPES
bull Base of Aircraft Data (BADA) depending on ac type
ndash Nominal control variables (BADA 3)
ndash Full flight variable envelope (BADA 4)
bull optimization
Aircraft
Performance
Data
AIRCRAFT EQUATION OF MOTION
bull equation of motion sufficient in 3 dof
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
number of parameters of the system that may vary independently
BASE OF AIRCRAFT DATA (BADA)
bull There are two families of BADA APM based on the same modelling approach and components [EUROCONTROL]
bull BADA Family 3ndash providing a 90 coverage of the current aircraft types operating
in the ECAC airspace
ndash model aircraft behaviour over the normal operations part of the flight envelope and to meet todays requirements for aircraft performance modelling and simulation
bull BADA Family 4 ndash a newly developed model intended to meet advanced functional
and precision requirements of the new ATM systems
ndash providing a 60 coverage of the current aircraft types operating in ECAC airspace
ndash BADA 4 provides accurate modelling of aircraft over the entire flight envelope and enables modelling and simulation of advanced concepts of future systems
AIRCRAFT PERFORMANCE MODEL
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
BADA AIRCRAFT LIMITATION MODEL
DATA TYPES
bull Business objectives
ndash Cost Index
ndash User Preferences Model (UPM)
ndash Ground delays due to connectionshellip
Business Rules
euro
HORIZONTAL OPTIMISATION
TO_WPT FROM_WPT Cost
A
B
C
DEP
DEP
DEP
21
25
23
A
A
E
B
52
40
CG 45
B
B
E
F
49
53
G
G
F
J
73
79
E
E
K
H
84
75
F
F
H
I
70
67
I
I
L
M
96
85
HL 86
JM 119
KO 117
KL 109
MQ 115
LP 118
QDEST 134
OP 136
PDEST 130
Worklist
Dijkstra algorithm
DEPDEST
16
40
19
12
19
J
28
34
I14
17
O33
25
Q30
P32
F24
28
D
E
19
31
G22
A
B
C
2125
23
H
K
35
26 L
M18
29
1) Selection of segments for current from- waypoint
2) Calculation of costs for selected segments
3) Entering calculated datasets into worklist
4) Selection of best dataset from worklist
5) To- waypoint of best dataset becomes from- waypoint
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
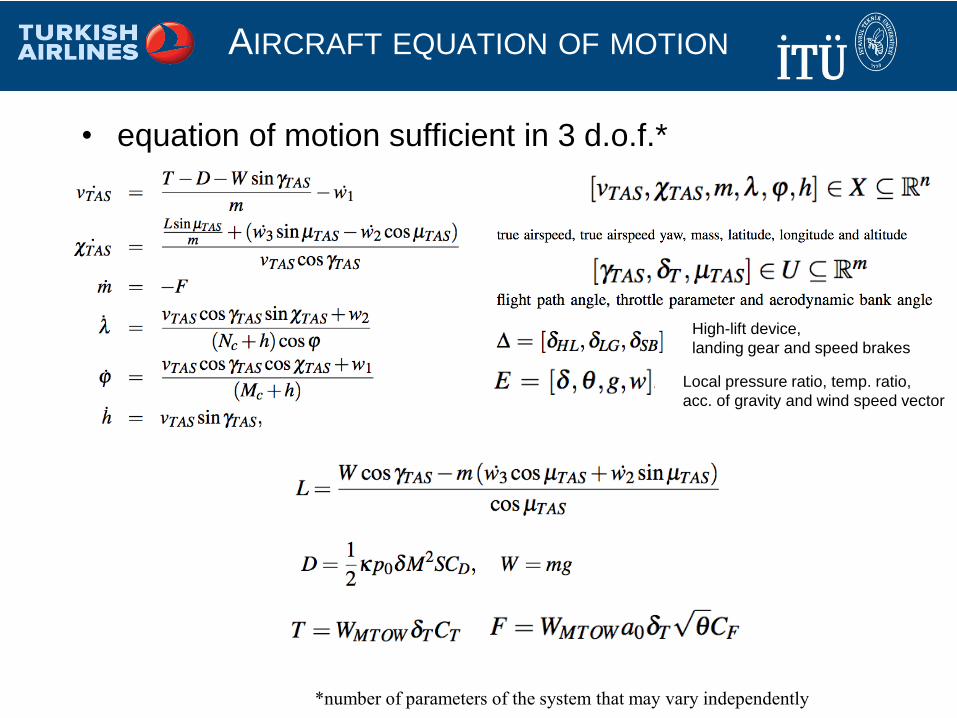
AIRCRAFT EQUATION OF MOTION
bull equation of motion sufficient in 3 dof
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
number of parameters of the system that may vary independently
BASE OF AIRCRAFT DATA (BADA)
bull There are two families of BADA APM based on the same modelling approach and components [EUROCONTROL]
bull BADA Family 3ndash providing a 90 coverage of the current aircraft types operating
in the ECAC airspace
ndash model aircraft behaviour over the normal operations part of the flight envelope and to meet todays requirements for aircraft performance modelling and simulation
bull BADA Family 4 ndash a newly developed model intended to meet advanced functional
and precision requirements of the new ATM systems
ndash providing a 60 coverage of the current aircraft types operating in ECAC airspace
ndash BADA 4 provides accurate modelling of aircraft over the entire flight envelope and enables modelling and simulation of advanced concepts of future systems
AIRCRAFT PERFORMANCE MODEL
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
BADA AIRCRAFT LIMITATION MODEL
DATA TYPES
bull Business objectives
ndash Cost Index
ndash User Preferences Model (UPM)
ndash Ground delays due to connectionshellip
Business Rules
euro
HORIZONTAL OPTIMISATION
TO_WPT FROM_WPT Cost
A
B
C
DEP
DEP
DEP
21
25
23
A
A
E
B
52
40
CG 45
B
B
E
F
49
53
G
G
F
J
73
79
E
E
K
H
84
75
F
F
H
I
70
67
I
I
L
M
96
85
HL 86
JM 119
KO 117
KL 109
MQ 115
LP 118
QDEST 134
OP 136
PDEST 130
Worklist
Dijkstra algorithm
DEPDEST
16
40
19
12
19
J
28
34
I14
17
O33
25
Q30
P32
F24
28
D
E
19
31
G22
A
B
C
2125
23
H
K
35
26 L
M18
29
1) Selection of segments for current from- waypoint
2) Calculation of costs for selected segments
3) Entering calculated datasets into worklist
4) Selection of best dataset from worklist
5) To- waypoint of best dataset becomes from- waypoint
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
BASE OF AIRCRAFT DATA (BADA)
bull There are two families of BADA APM based on the same modelling approach and components [EUROCONTROL]
bull BADA Family 3ndash providing a 90 coverage of the current aircraft types operating
in the ECAC airspace
ndash model aircraft behaviour over the normal operations part of the flight envelope and to meet todays requirements for aircraft performance modelling and simulation
bull BADA Family 4 ndash a newly developed model intended to meet advanced functional
and precision requirements of the new ATM systems
ndash providing a 60 coverage of the current aircraft types operating in ECAC airspace
ndash BADA 4 provides accurate modelling of aircraft over the entire flight envelope and enables modelling and simulation of advanced concepts of future systems
AIRCRAFT PERFORMANCE MODEL
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
BADA AIRCRAFT LIMITATION MODEL
DATA TYPES
bull Business objectives
ndash Cost Index
ndash User Preferences Model (UPM)
ndash Ground delays due to connectionshellip
Business Rules
euro
HORIZONTAL OPTIMISATION
TO_WPT FROM_WPT Cost
A
B
C
DEP
DEP
DEP
21
25
23
A
A
E
B
52
40
CG 45
B
B
E
F
49
53
G
G
F
J
73
79
E
E
K
H
84
75
F
F
H
I
70
67
I
I
L
M
96
85
HL 86
JM 119
KO 117
KL 109
MQ 115
LP 118
QDEST 134
OP 136
PDEST 130
Worklist
Dijkstra algorithm
DEPDEST
16
40
19
12
19
J
28
34
I14
17
O33
25
Q30
P32
F24
28
D
E
19
31
G22
A
B
C
2125
23
H
K
35
26 L
M18
29
1) Selection of segments for current from- waypoint
2) Calculation of costs for selected segments
3) Entering calculated datasets into worklist
4) Selection of best dataset from worklist
5) To- waypoint of best dataset becomes from- waypoint
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
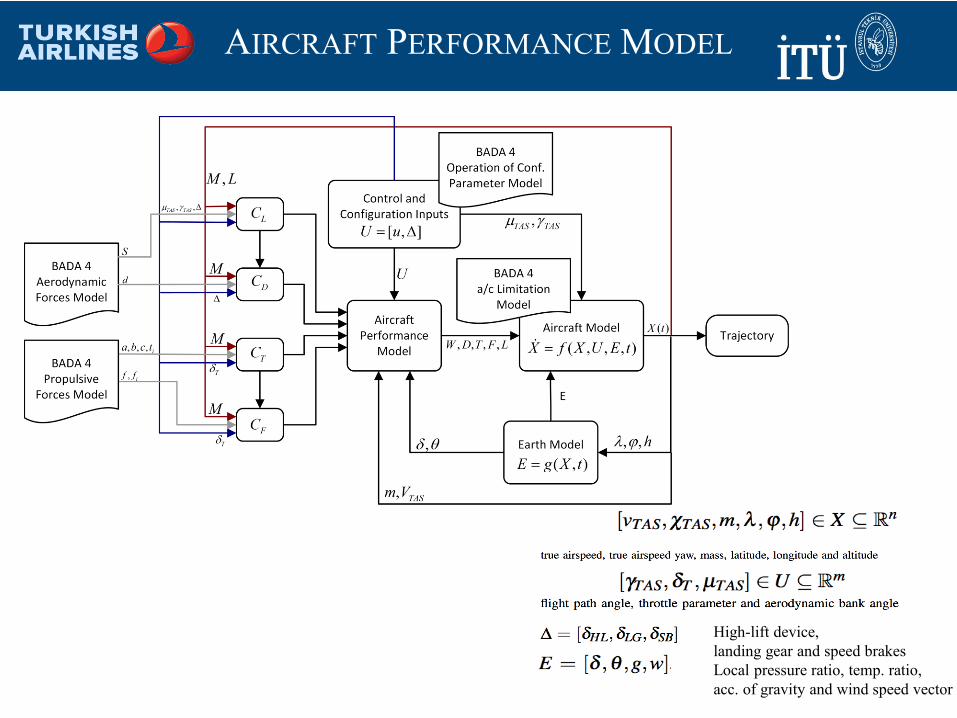
AIRCRAFT PERFORMANCE MODEL
High-lift device
landing gear and speed brakes
Local pressure ratio temp ratio
acc of gravity and wind speed vector
BADA AIRCRAFT LIMITATION MODEL
DATA TYPES
bull Business objectives
ndash Cost Index
ndash User Preferences Model (UPM)
ndash Ground delays due to connectionshellip
Business Rules
euro
HORIZONTAL OPTIMISATION
TO_WPT FROM_WPT Cost
A
B
C
DEP
DEP
DEP
21
25
23
A
A
E
B
52
40
CG 45
B
B
E
F
49
53
G
G
F
J
73
79
E
E
K
H
84
75
F
F
H
I
70
67
I
I
L
M
96
85
HL 86
JM 119
KO 117
KL 109
MQ 115
LP 118
QDEST 134
OP 136
PDEST 130
Worklist
Dijkstra algorithm
DEPDEST
16
40
19
12
19
J
28
34
I14
17
O33
25
Q30
P32
F24
28
D
E
19
31
G22
A
B
C
2125
23
H
K
35
26 L
M18
29
1) Selection of segments for current from- waypoint
2) Calculation of costs for selected segments
3) Entering calculated datasets into worklist
4) Selection of best dataset from worklist
5) To- waypoint of best dataset becomes from- waypoint
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
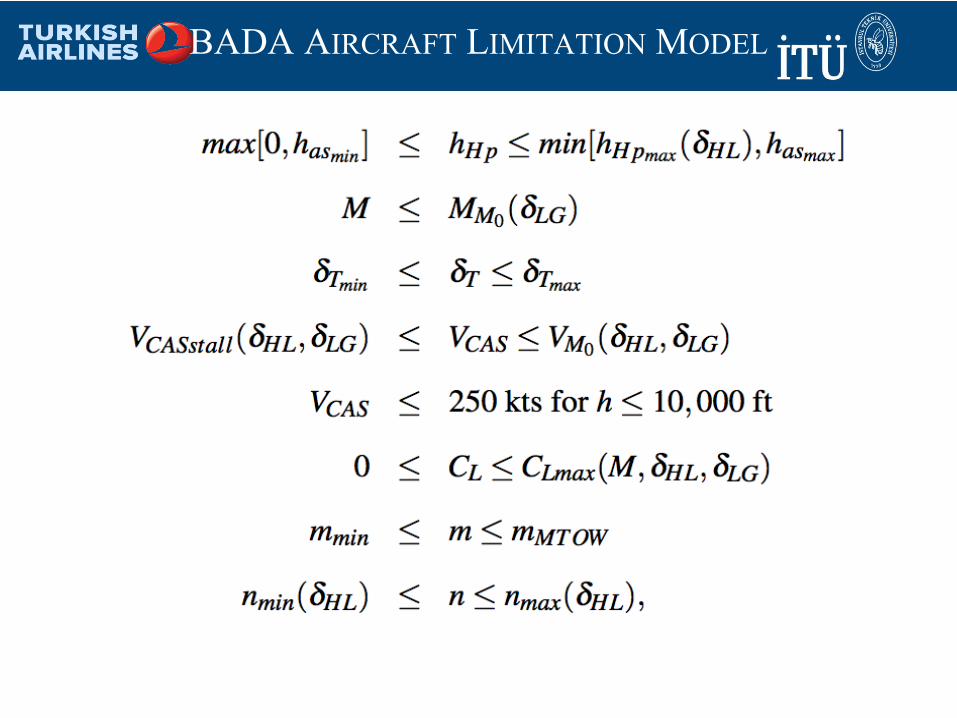
BADA AIRCRAFT LIMITATION MODEL
DATA TYPES
bull Business objectives
ndash Cost Index
ndash User Preferences Model (UPM)
ndash Ground delays due to connectionshellip
Business Rules
euro
HORIZONTAL OPTIMISATION
TO_WPT FROM_WPT Cost
A
B
C
DEP
DEP
DEP
21
25
23
A
A
E
B
52
40
CG 45
B
B
E
F
49
53
G
G
F
J
73
79
E
E
K
H
84
75
F
F
H
I
70
67
I
I
L
M
96
85
HL 86
JM 119
KO 117
KL 109
MQ 115
LP 118
QDEST 134
OP 136
PDEST 130
Worklist
Dijkstra algorithm
DEPDEST
16
40
19
12
19
J
28
34
I14
17
O33
25
Q30
P32
F24
28
D
E
19
31
G22
A
B
C
2125
23
H
K
35
26 L
M18
29
1) Selection of segments for current from- waypoint
2) Calculation of costs for selected segments
3) Entering calculated datasets into worklist
4) Selection of best dataset from worklist
5) To- waypoint of best dataset becomes from- waypoint
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
DATA TYPES
bull Business objectives
ndash Cost Index
ndash User Preferences Model (UPM)
ndash Ground delays due to connectionshellip
Business Rules
euro
HORIZONTAL OPTIMISATION
TO_WPT FROM_WPT Cost
A
B
C
DEP
DEP
DEP
21
25
23
A
A
E
B
52
40
CG 45
B
B
E
F
49
53
G
G
F
J
73
79
E
E
K
H
84
75
F
F
H
I
70
67
I
I
L
M
96
85
HL 86
JM 119
KO 117
KL 109
MQ 115
LP 118
QDEST 134
OP 136
PDEST 130
Worklist
Dijkstra algorithm
DEPDEST
16
40
19
12
19
J
28
34
I14
17
O33
25
Q30
P32
F24
28
D
E
19
31
G22
A
B
C
2125
23
H
K
35
26 L
M18
29
1) Selection of segments for current from- waypoint
2) Calculation of costs for selected segments
3) Entering calculated datasets into worklist
4) Selection of best dataset from worklist
5) To- waypoint of best dataset becomes from- waypoint
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS

HORIZONTAL OPTIMISATION
TO_WPT FROM_WPT Cost
A
B
C
DEP
DEP
DEP
21
25
23
A
A
E
B
52
40
CG 45
B
B
E
F
49
53
G
G
F
J
73
79
E
E
K
H
84
75
F
F
H
I
70
67
I
I
L
M
96
85
HL 86
JM 119
KO 117
KL 109
MQ 115
LP 118
QDEST 134
OP 136
PDEST 130
Worklist
Dijkstra algorithm
DEPDEST
16
40
19
12
19
J
28
34
I14
17
O33
25
Q30
P32
F24
28
D
E
19
31
G22
A
B
C
2125
23
H
K
35
26 L
M18
29
1) Selection of segments for current from- waypoint
2) Calculation of costs for selected segments
3) Entering calculated datasets into worklist
4) Selection of best dataset from worklist
5) To- waypoint of best dataset becomes from- waypoint
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
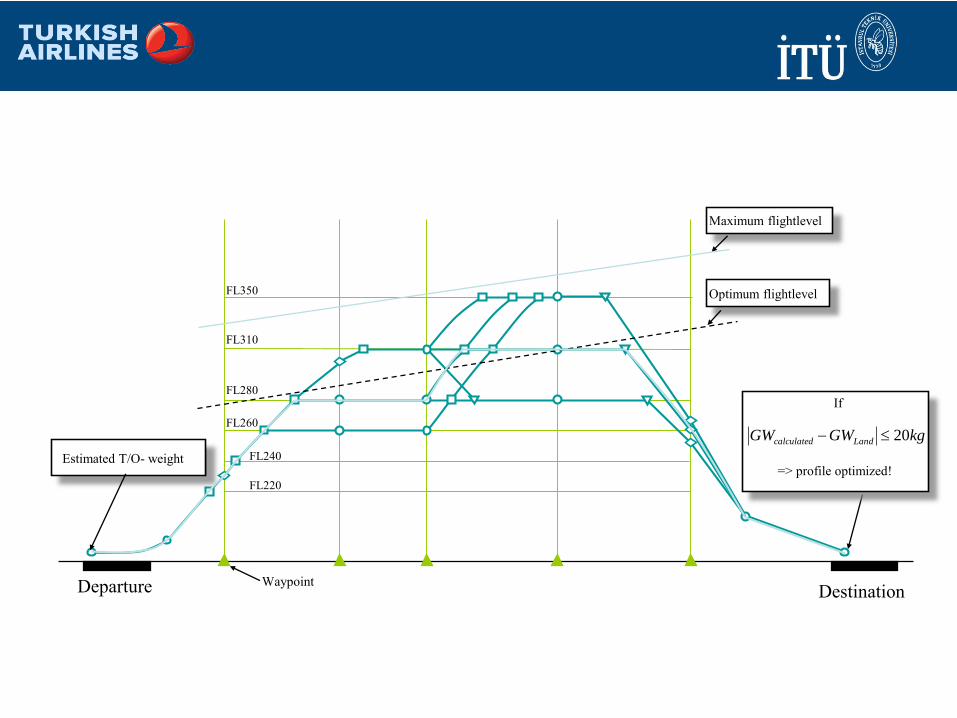
Departure DestinationWaypoint
FL350
FL310
FL280
FL260
FL240
FL220
Maximum flightlevel
Optimum flightlevel
Estimated TO- weight
kgGWGW Landcalculated 20
If
=gt profile optimized
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
DIJKSTRAS ALGORITHM
Dijkstras algorithm - is a solution to the single-source shortest path problem in graph theory
Works on both directed and undirected graphs However all edges must have nonnegative weights
Approach Greedy
Input Weighted graph G=EV and source vertex visinV such that all edge weights are nonnegative
Output Lengths of shortest paths (or the shortest paths themselves) from a given source vertex visinV to all other vertices
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
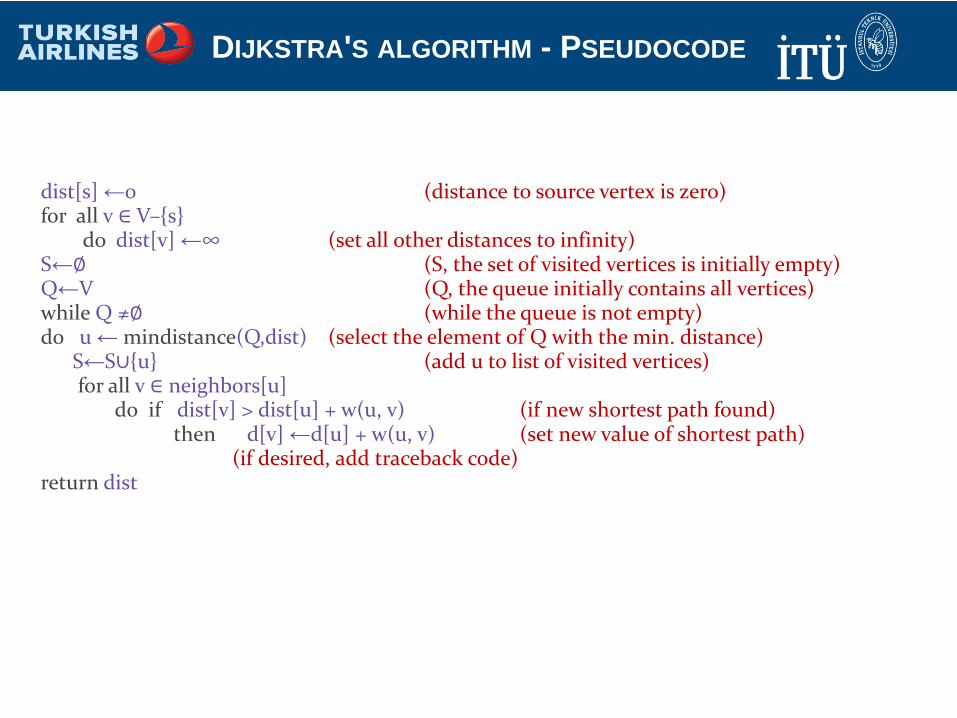
DIJKSTRAS ALGORITHM - PSEUDOCODE
dist[s] larr0 (distance to source vertex is zero)for all v isin Vndashs
do dist[v] larrinfin (set all other distances to infinity) Slarrempty (S the set of visited vertices is initially empty) QlarrV (Q the queue initially contains all vertices) while Q neempty (while the queue is not empty) do u larr mindistance(Qdist) (select the element of Q with the min distance)
SlarrScupu (add u to list of visited vertices) for all v isin neighbors[u]
do if dist[v] gt dist[u] + w(u v) (if new shortest path found)then d[v] larrd[u] + w(u v) (set new value of shortest path)
(if desired add traceback code)return dist
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
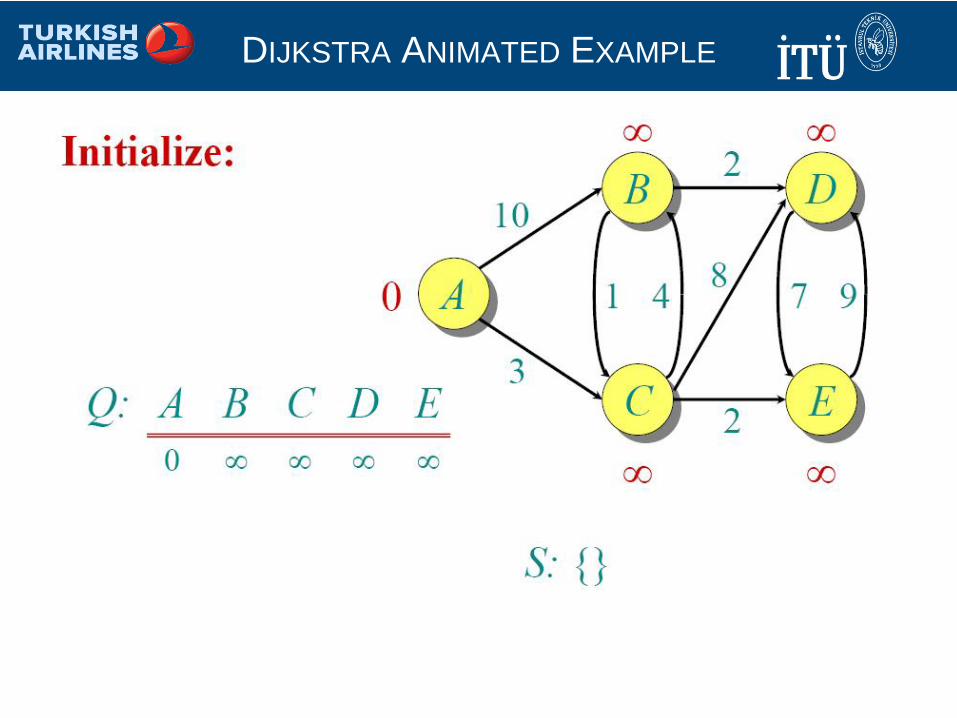
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
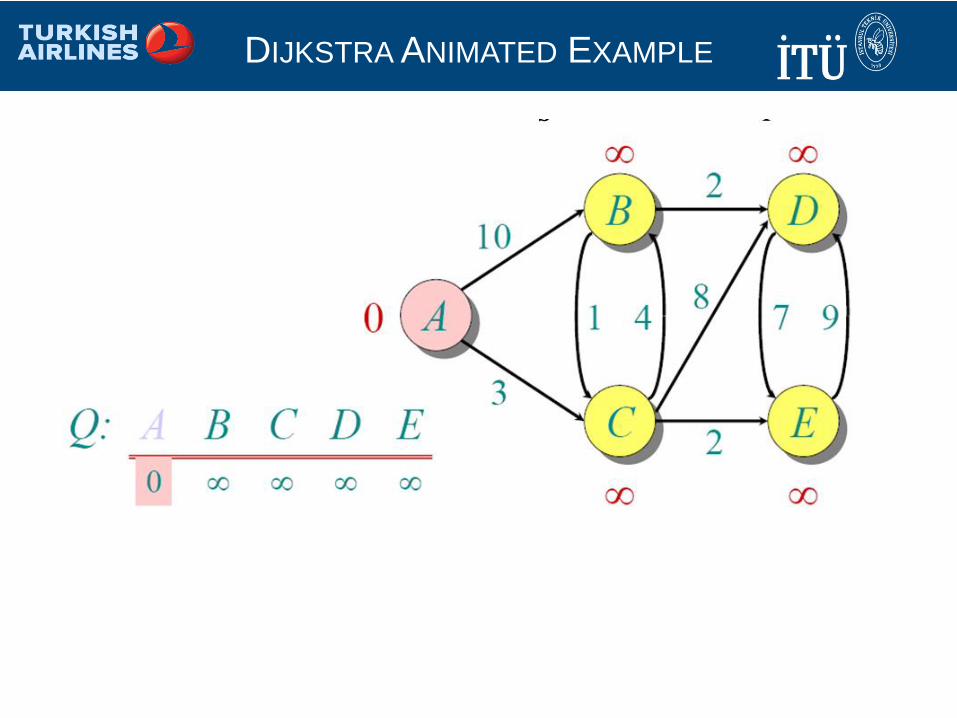
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
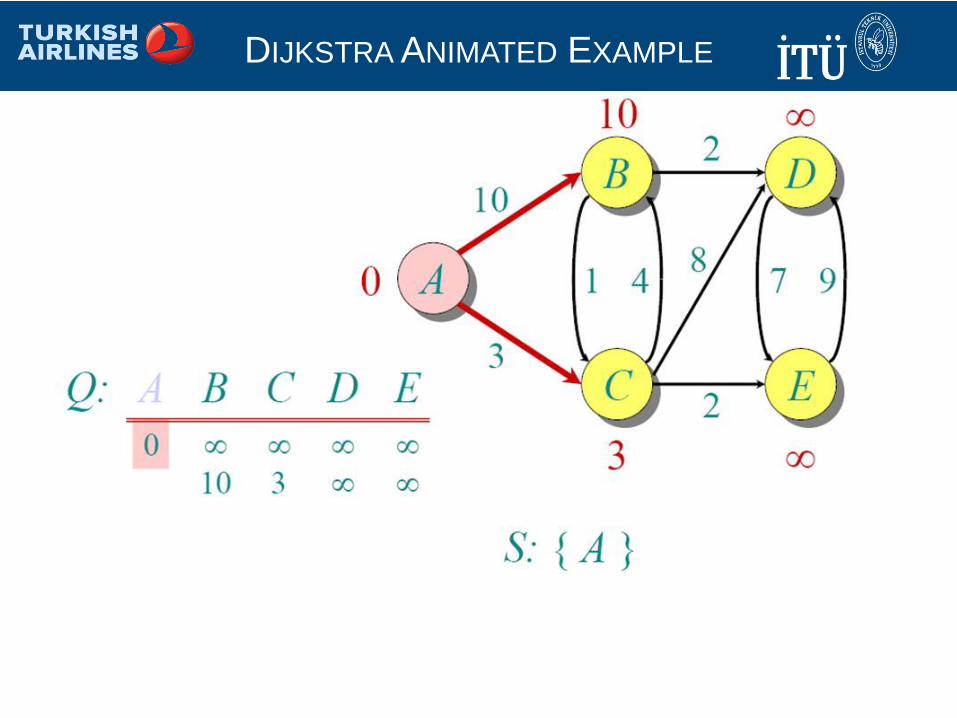
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
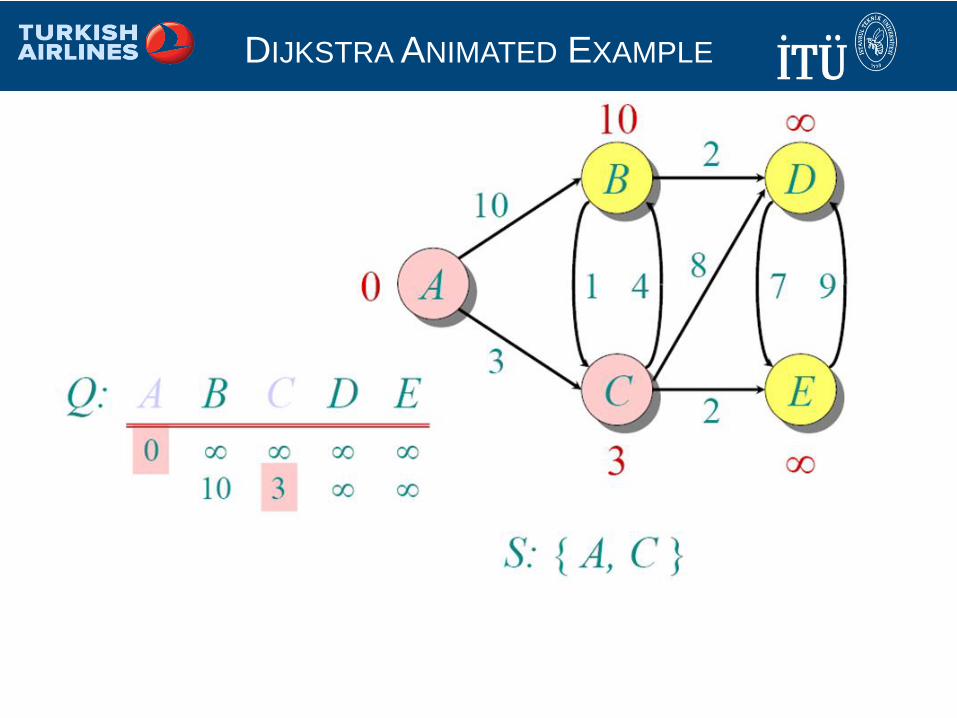
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
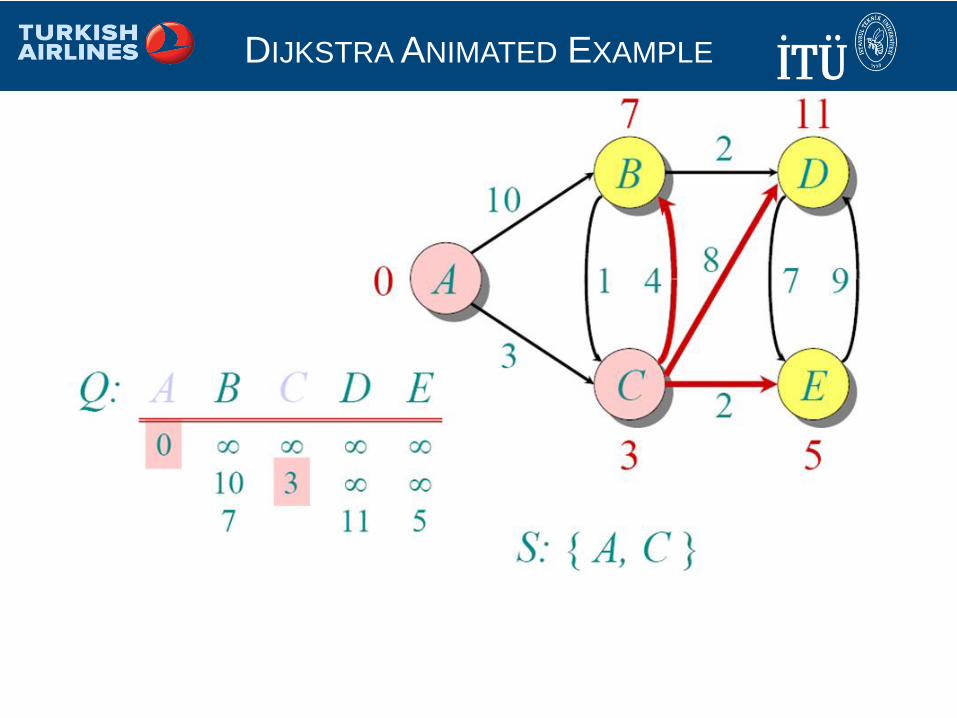
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
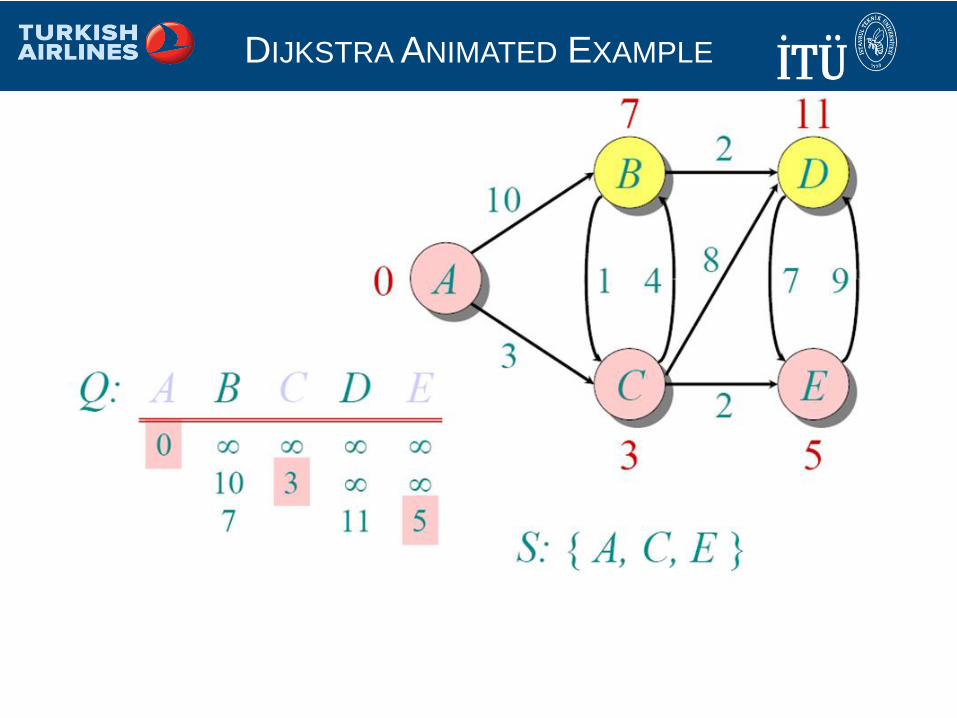
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
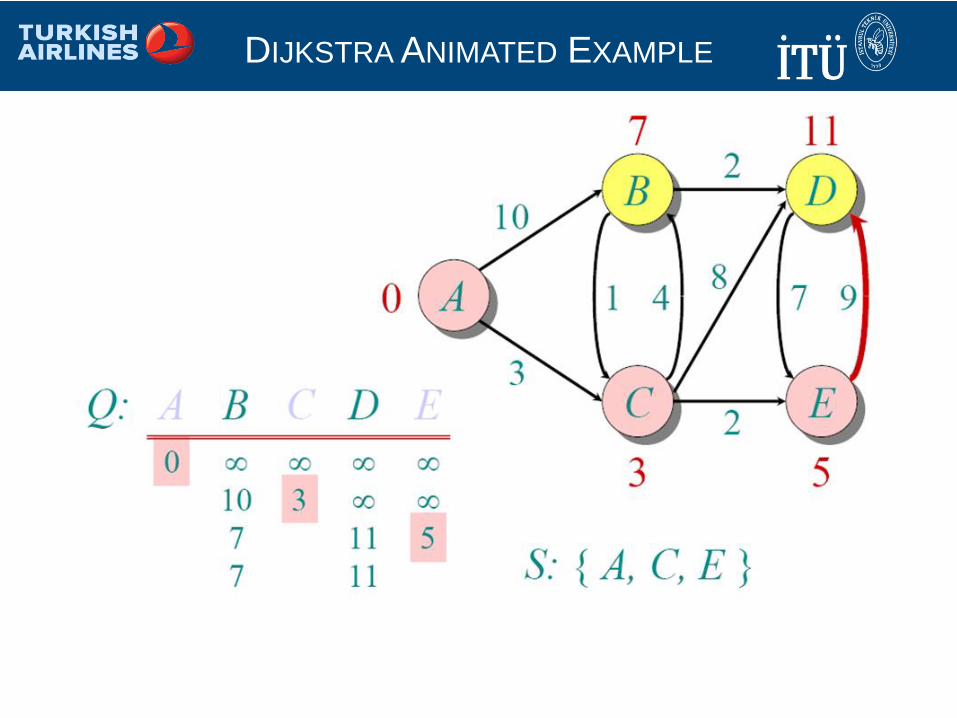
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
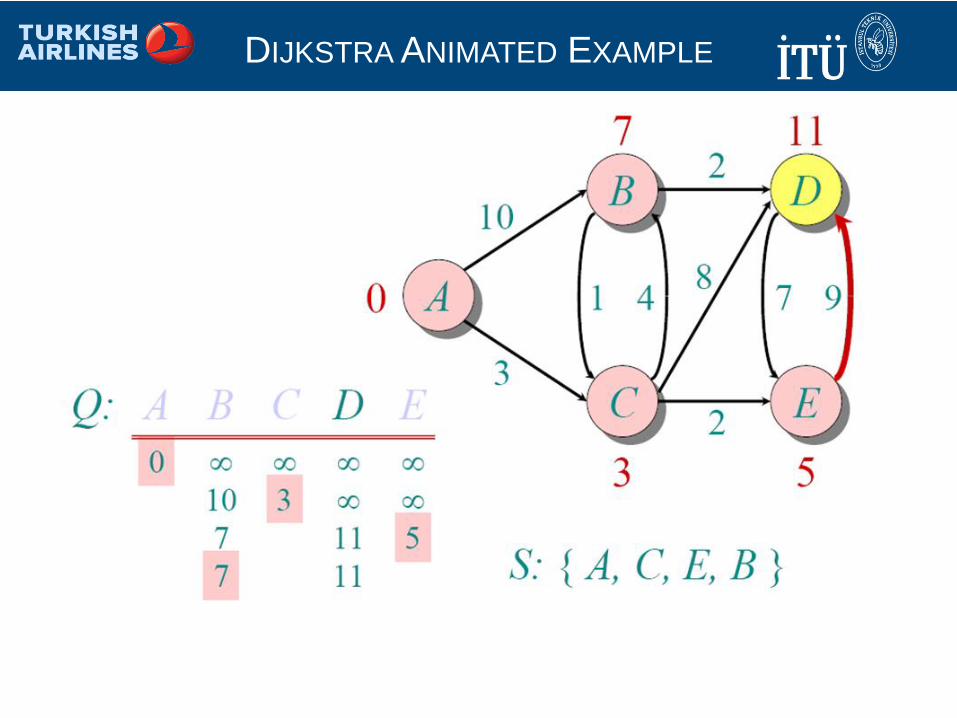
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
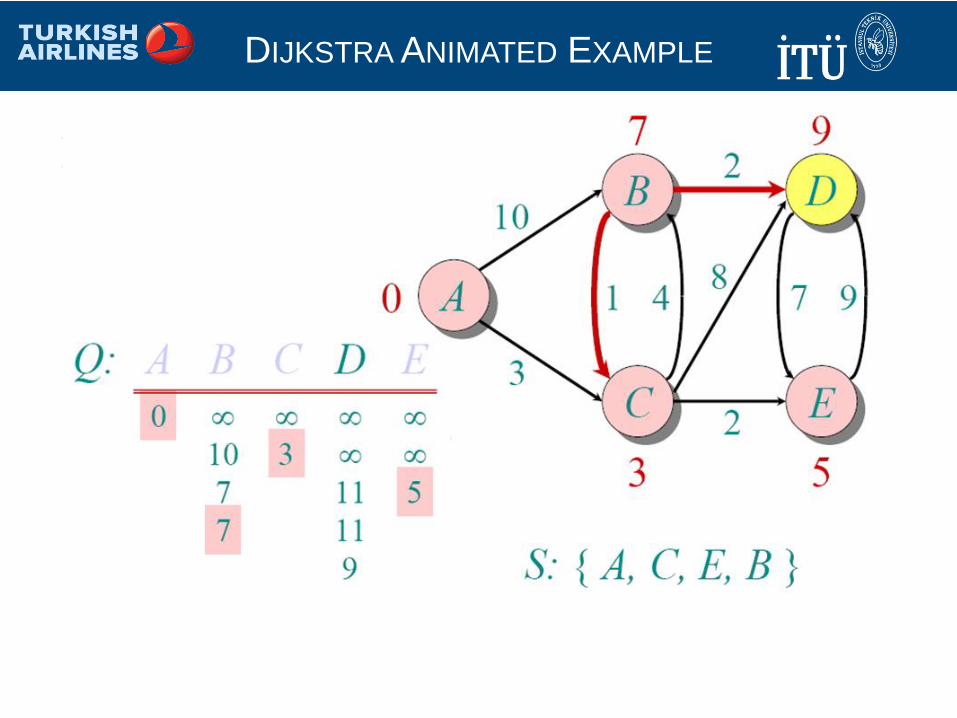
DIJKSTRA ANIMATED EXAMPLE
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
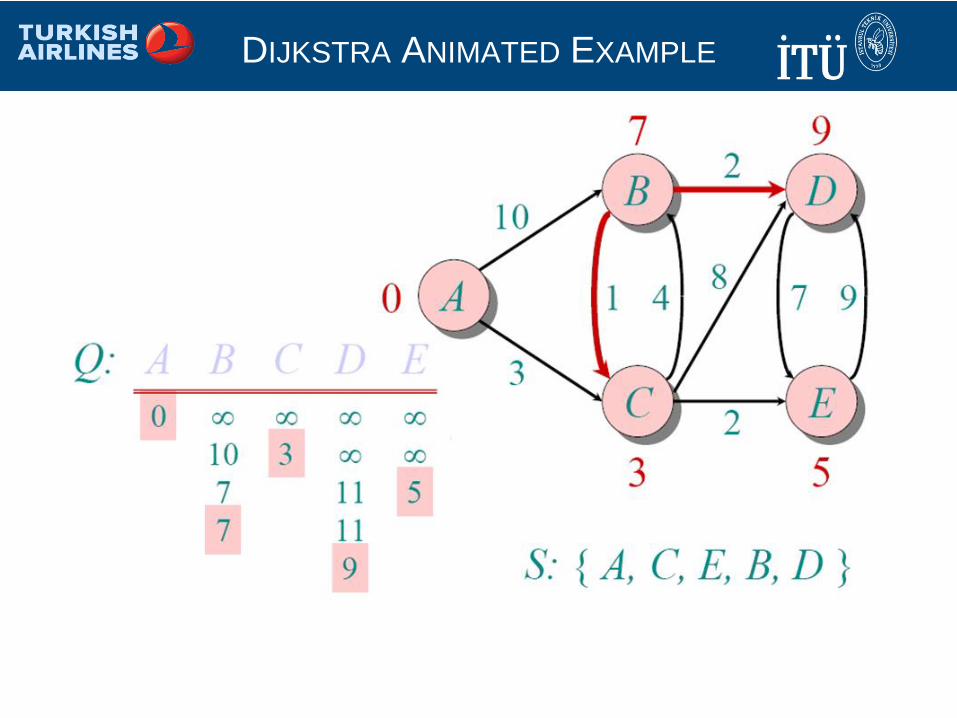
DIJKSTRA ANIMATED EXAMPLE
bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS

bull To understand how it works wersquoll go over the previous example again However we need two mathematical results first
bull Lemma 1 Triangle inequalityIf δ(uv) is the shortest path length between u and vδ(uv) le δ(ux) + δ(xv)
bull Lemma 2 The subpath of any shortest path is itself a shortest path
bull The key is to understand why we can claim that anytime we put a new vertex in S we can say that we already know the shortest path to it
bull Now back to the examplehellip
DIJKSTRAS ALGORITHM - WHY IT WORKS
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
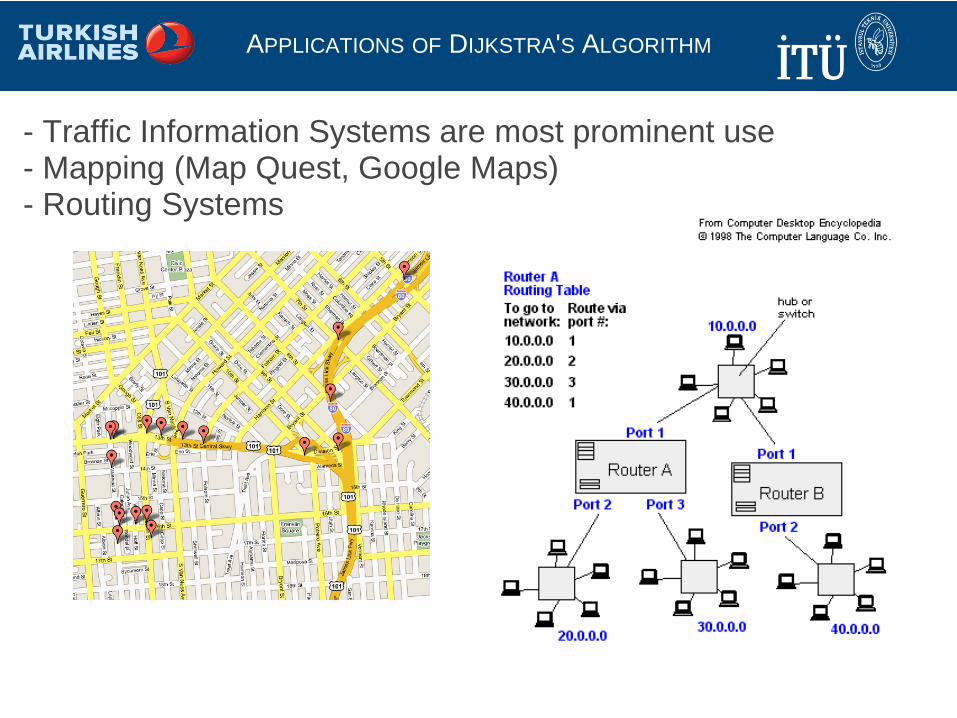
APPLICATIONS OF DIJKSTRAS ALGORITHM
- Traffic Information Systems are most prominent use- Mapping (Map Quest Google Maps) - Routing Systems
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
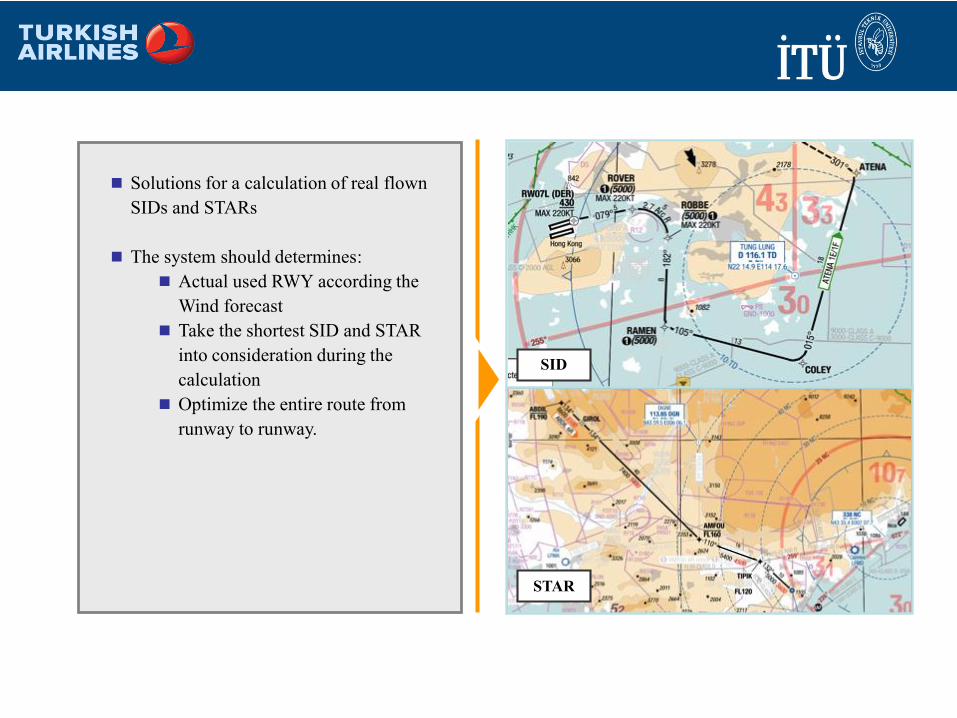
SID
Solutions for a calculation of real flown
SIDs and STARs
The system should determines
Actual used RWY according the
Wind forecast
Take the shortest SID and STAR
into consideration during the
calculation
Optimize the entire route from
runway to runway
STAR
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
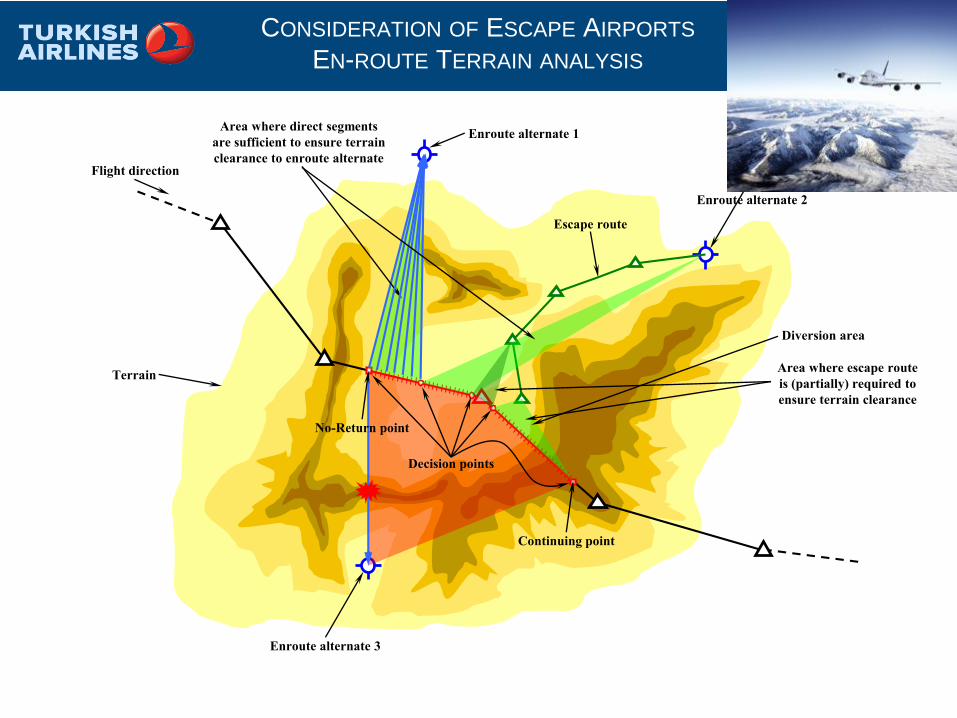
CONSIDERATION OF ESCAPE AIRPORTS
EN-ROUTE TERRAIN ANALYSIS
Enroute alternate 1
Enroute alternate 3
Escape route
Flight direction
Terrain
Continuing point
No-Return point
Diversion area
Area where direct segments
are sufficient to ensure terrain
clearance to enroute alternate
Decision points
Area where escape route
is (partially) required to
ensure terrain clearance
Enroute alternate 2
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
The Traffic Flow Restriction problem
The least cost path problem in connection
with TFR rules is an so called
NP-complete problem
the most notable characteristic of NP-
complete problems is that no fast solution to
them is known That is the time required to
solve the problem using any currently known
algorithm increases very quickly as the size
of the problem grows
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
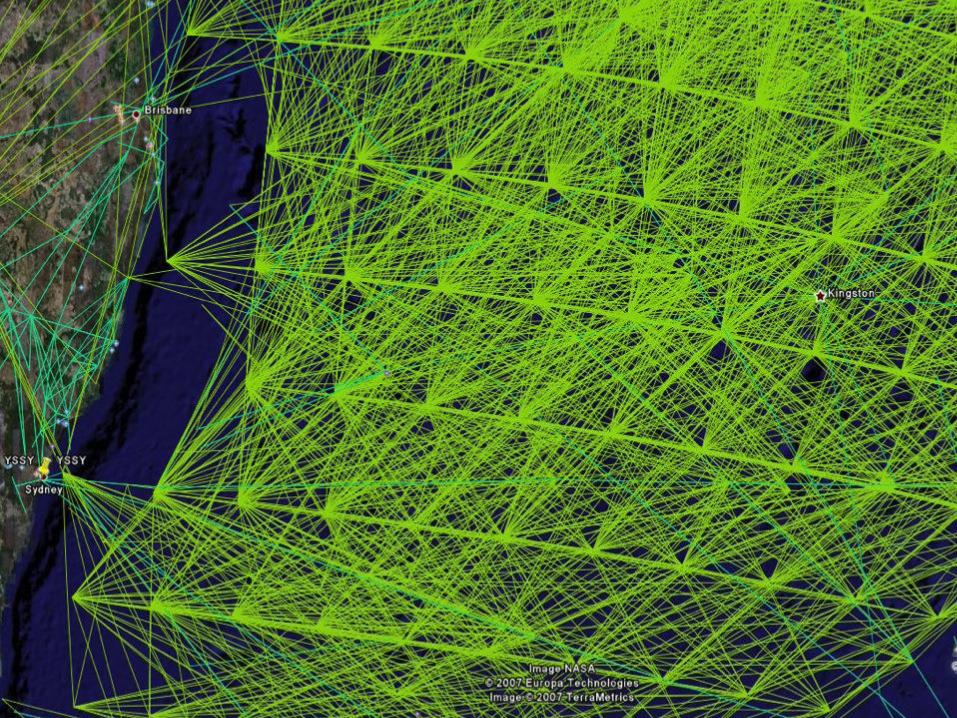
4D TRAJECTORY + TIME BASED FLOW MANAGEMENT
Defined lateralvertical dimensions
+ time allocation
V
L
T
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
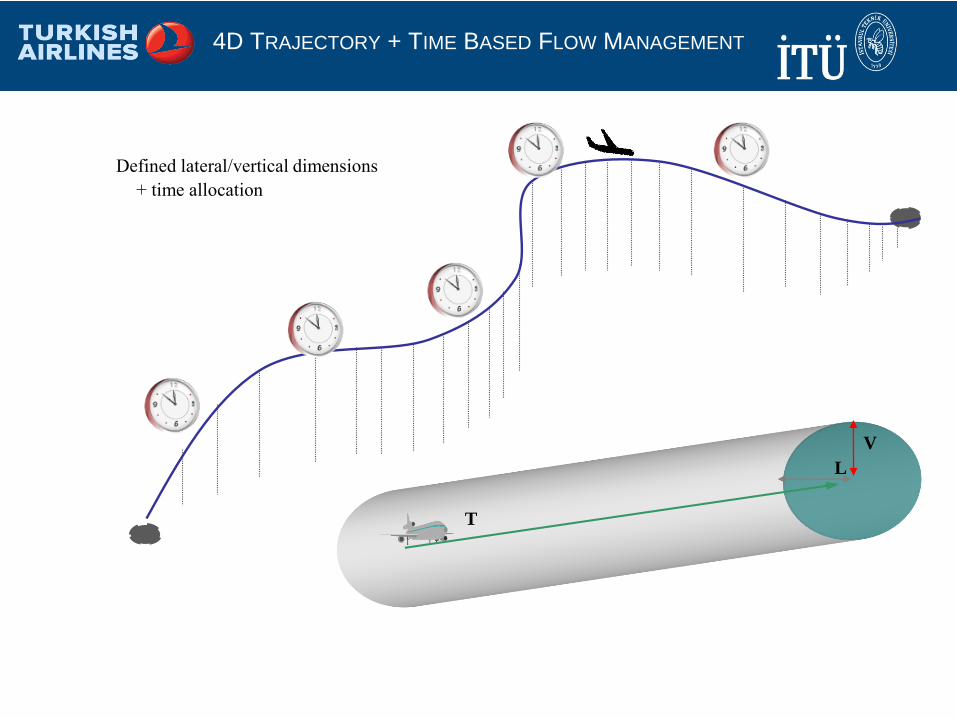
AIRSPACE DEMAND DATA ndash FLEXIBLE USE OF AIRSPACE
Trajectory Planning with and without airspace demand data load indications
Depending on the load in a defined sector the AU may avoid it or accept a delay
The sectors could be pre-defined (eg functional airspace blocks) or defined by NM
individually on ad hoc basic per each individual flight
The picture is only to demonstrate a general idea and not a final approved concept
OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS

OVERALL ATCFM OPTIMISITION BIG DATA
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
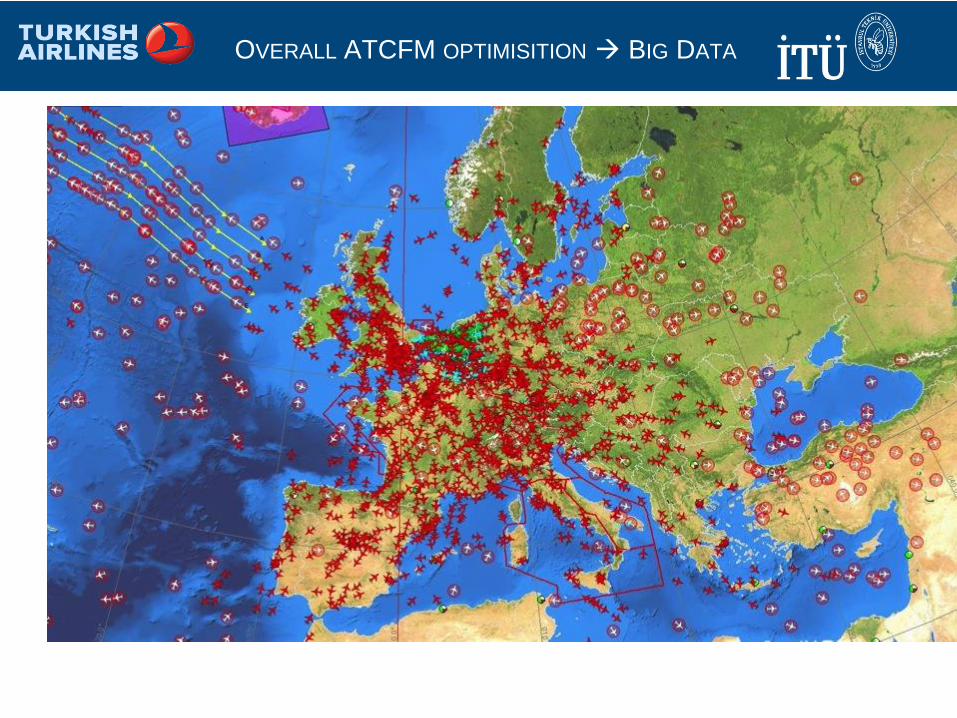
HOW BIG DATA MINING
MIGHT COMPLEMENT TODAYrsquoS APPROACHES
Todayrsquos solution approaches
Massive parallel computing
New Algorithm design From Dijkstra to
Ant-Colony
Branch amp Bound
Bidirectional Search
Evolution Strategy
Dynamic Programming
Simulated Annealing
Tabu-Search
Particle Swarm
HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS

HOW TO USE BIG DATA
Single Flight Event optimization has to be extended to
interdependent multidimensional air traffic system
optimization
Complex and high dynamic data pattern of traffic
schema need to be processes in shortest time intervals
Supercomputer might be essential to process the
gigantic amount of changing data to support ATC to de-
conflict traffic and optimize at the same time flight
efficiency
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
Lower Airspace
Manual ATC de-conflicting need big data support
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
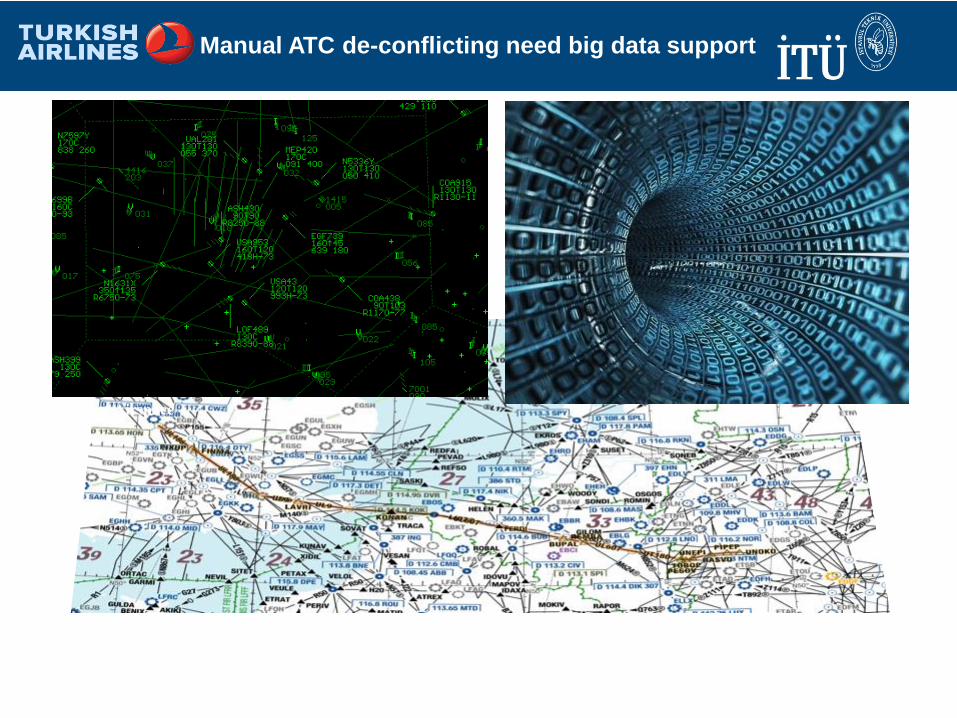
OVERALL ATCFM OPTIMISATION BIG DATA
How could classical optimisation procedures be combined with big data technologies
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
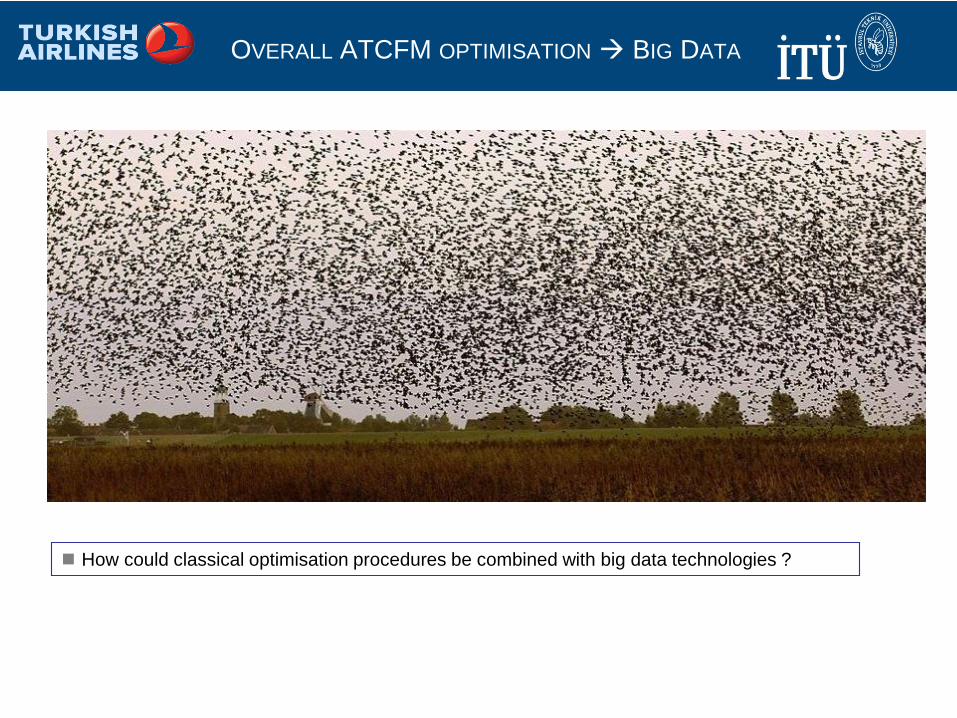
TRAJECTORY GENERATION WITHIN DIFFERENT SYSTEMS
AIRLINE OPS CENTRE VS NETWORK MANAGER AIR TRAFFIC CONTROL SYSTEMS
euro
AOC
calculate 4D trajectories
with small volume accuracy
spaces
intention is optimized in best
way through the AOC
accuracy space
NM ATC
calculate 4D trajectories but
the accuracy spaces will be
wide
make assumptions to overcome
the gaps within the input
parameters
accuracy space
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
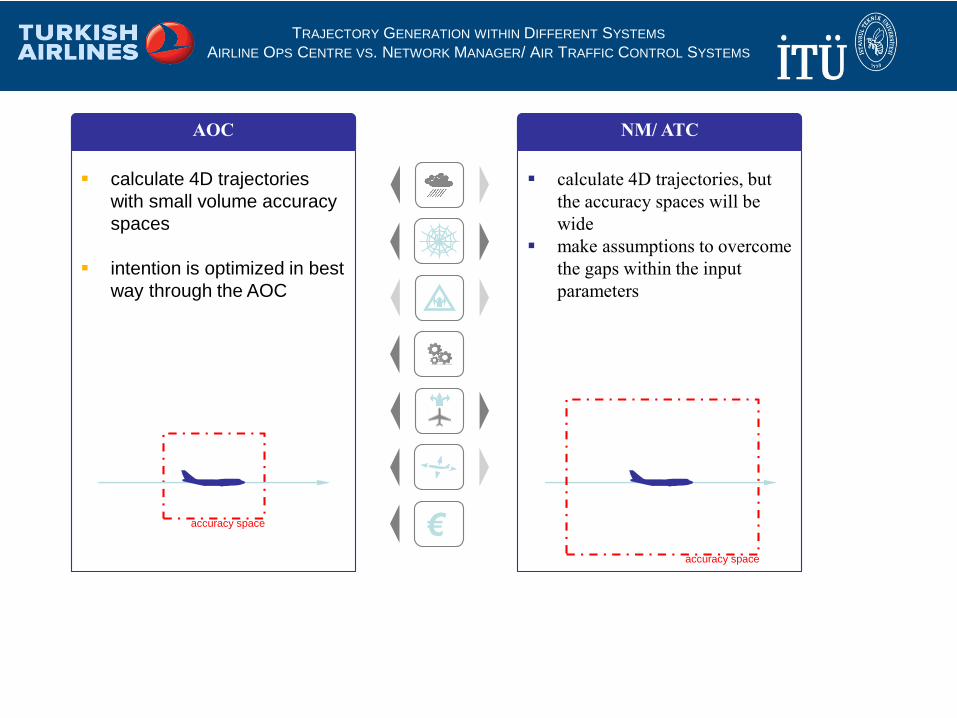
SESARrsquos Business Trajectory
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
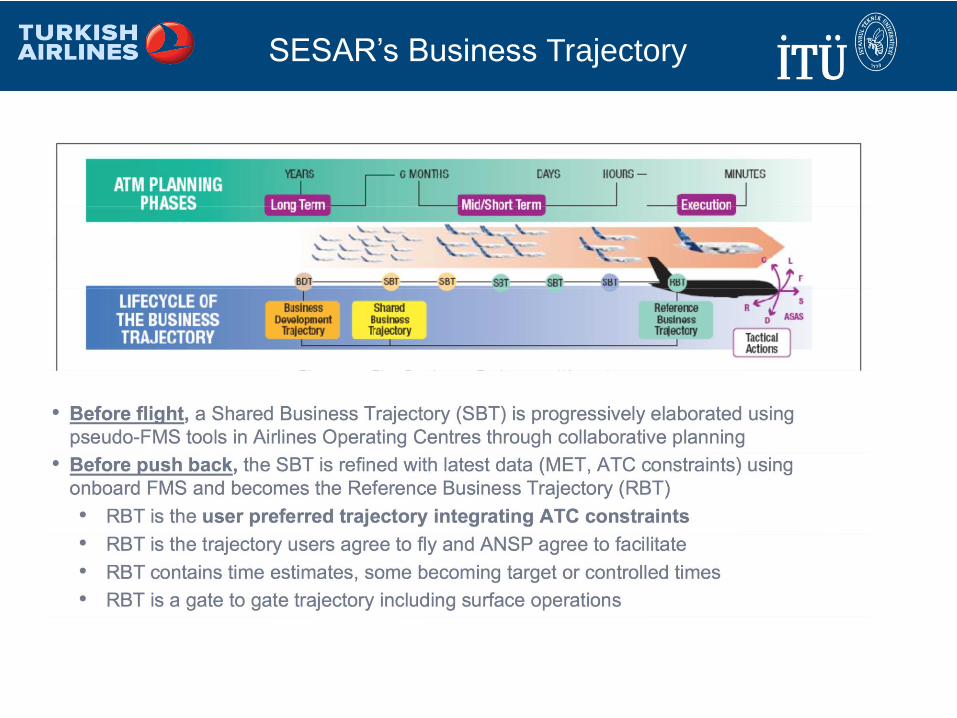
SESARrsquoS BUSINESS TRAJECTORY
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
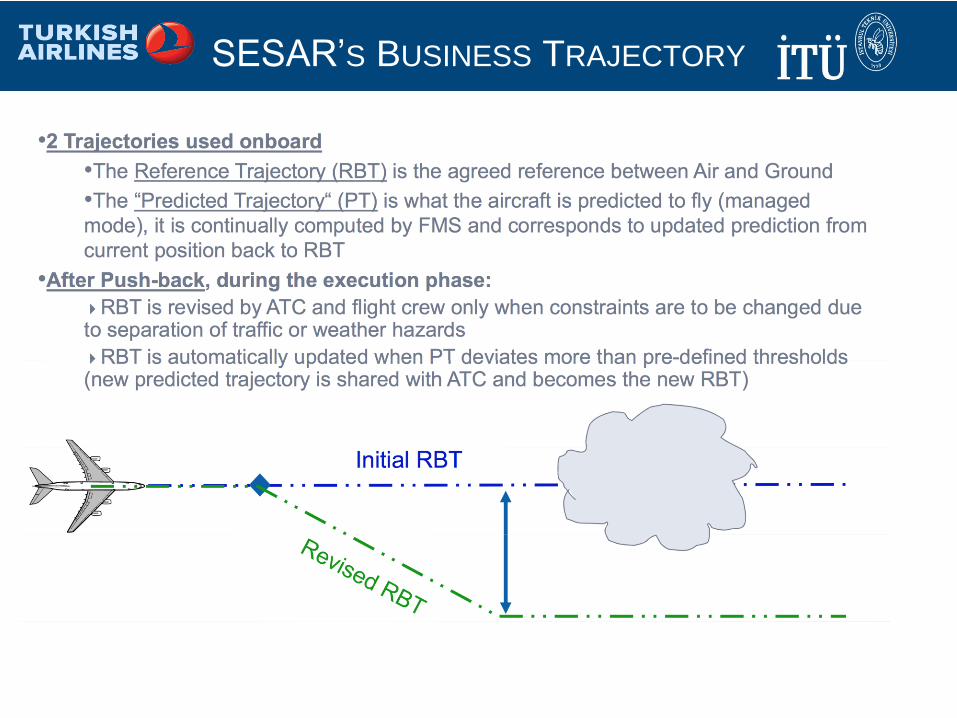
DIFFERENT REQUIREMENTS ON
BUSINESS TRAJECTORIES PER STAKEHOLDER
Needs
New technologies supporting de-conflicting on a totally different level
Automation to a maximum level
4D trajectories providing maximum flight efficiency from single flight event to the overall system efficiency
Airspace
User
ATC(Cost efficient)
NM Flow management and conflict resolution
providing maximum flight efficiency and ATM capacity
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
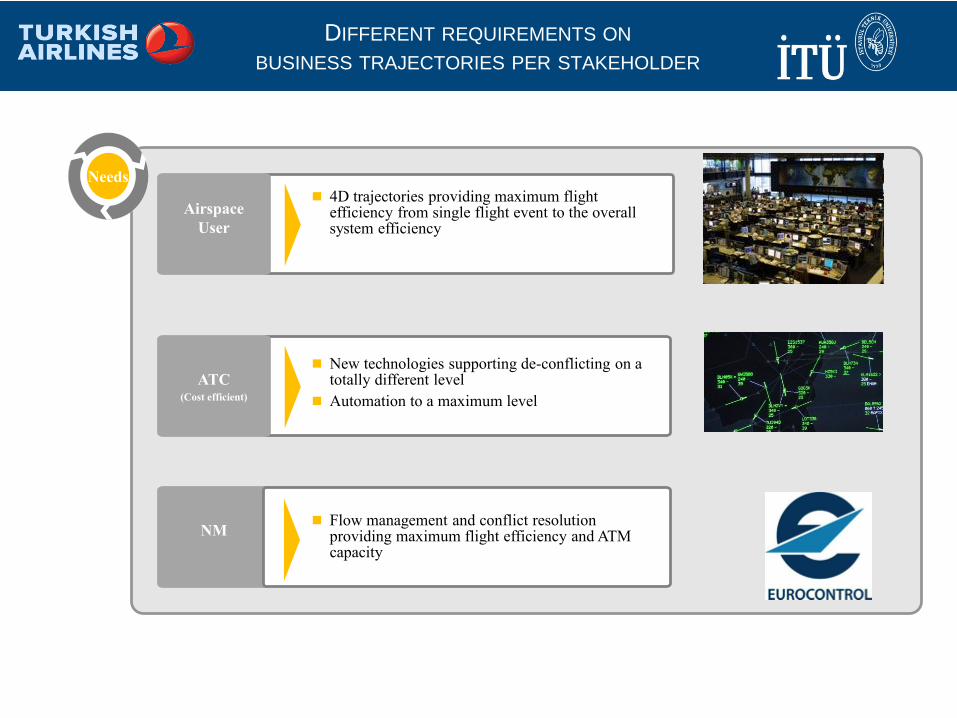
Use of Big data Optimisation with Big Data
BIG DATA IN COMBINATION WITH
CLASSICAL OPTIMISATION TECHNOLOGIES
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
INCIDENT ANALYSIS
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
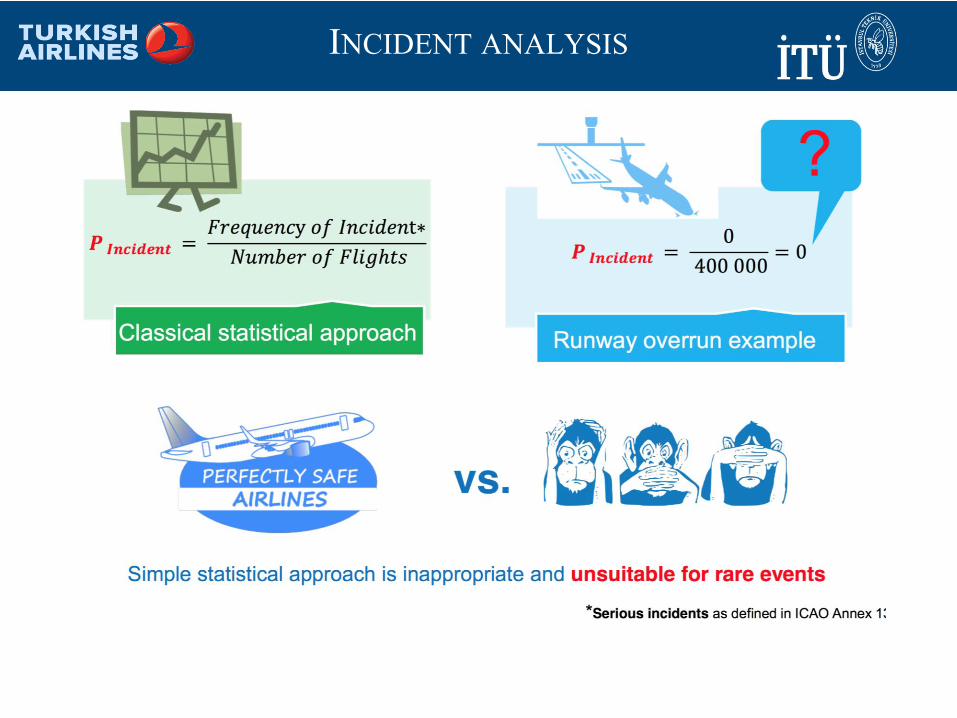
INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS

PREDICTIVE INCIDENT ANALYSIS
72
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
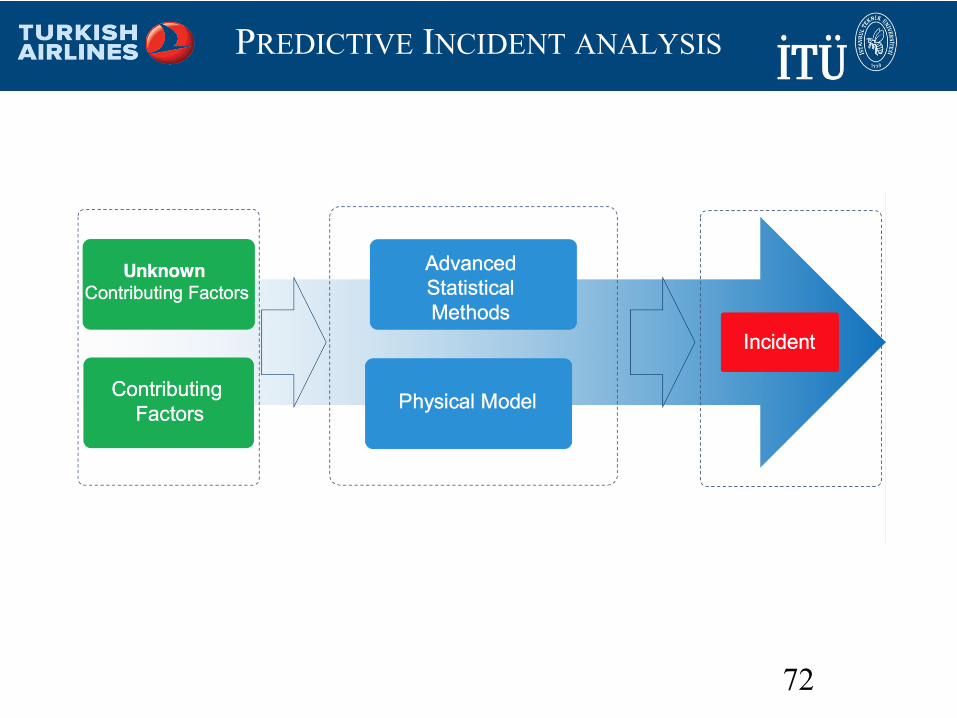
PREDICTIVE INCIDENT ANALYSIS
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
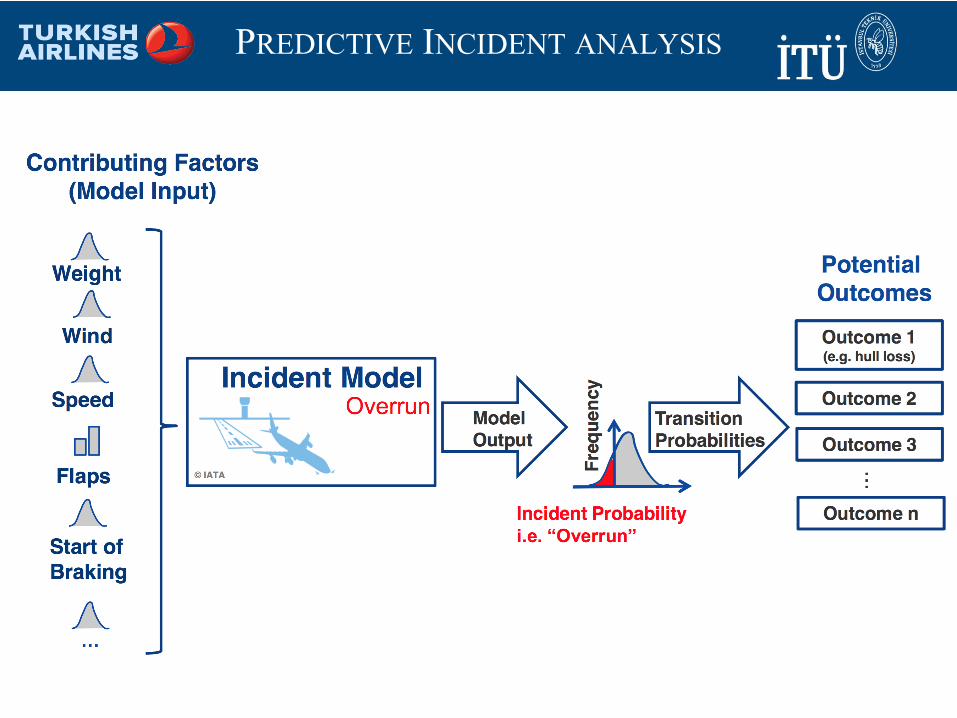
PREDICTIVE INCIDENT ANALYSIS
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
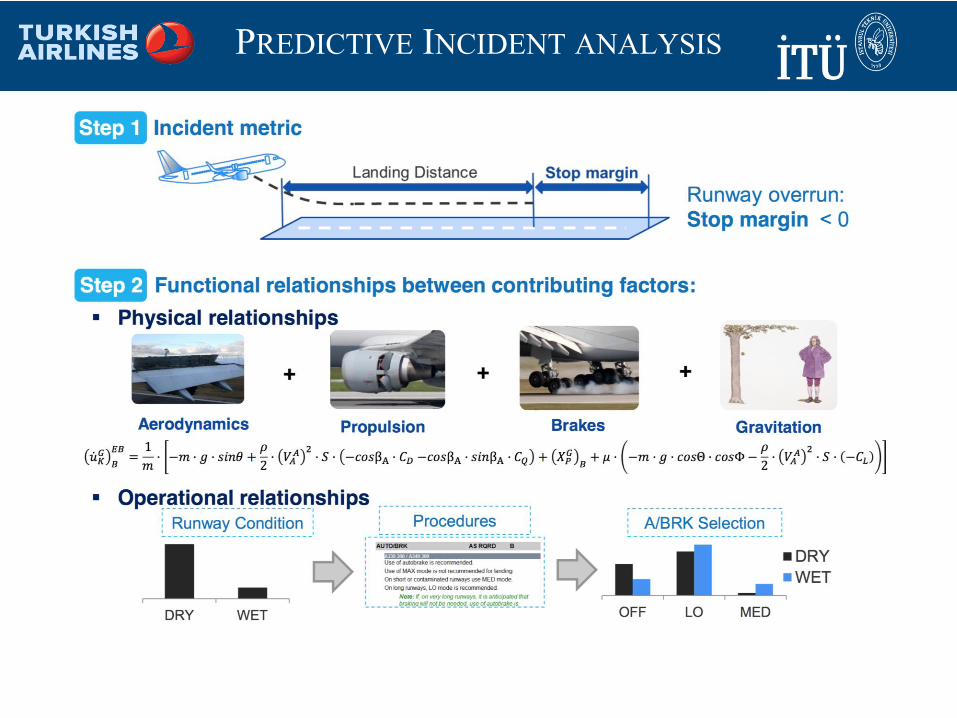
CAUSE-CONSEQUENCE CHAINS
ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS

ASKING RIGHT QUESTION
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
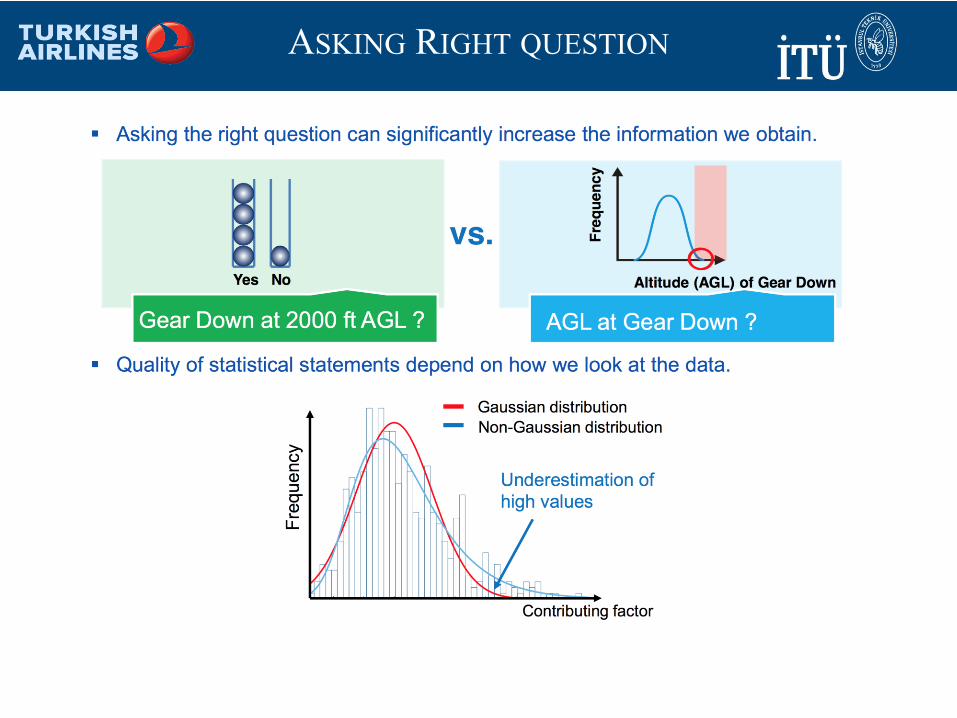
PARAMETER ESTIMATION
77
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
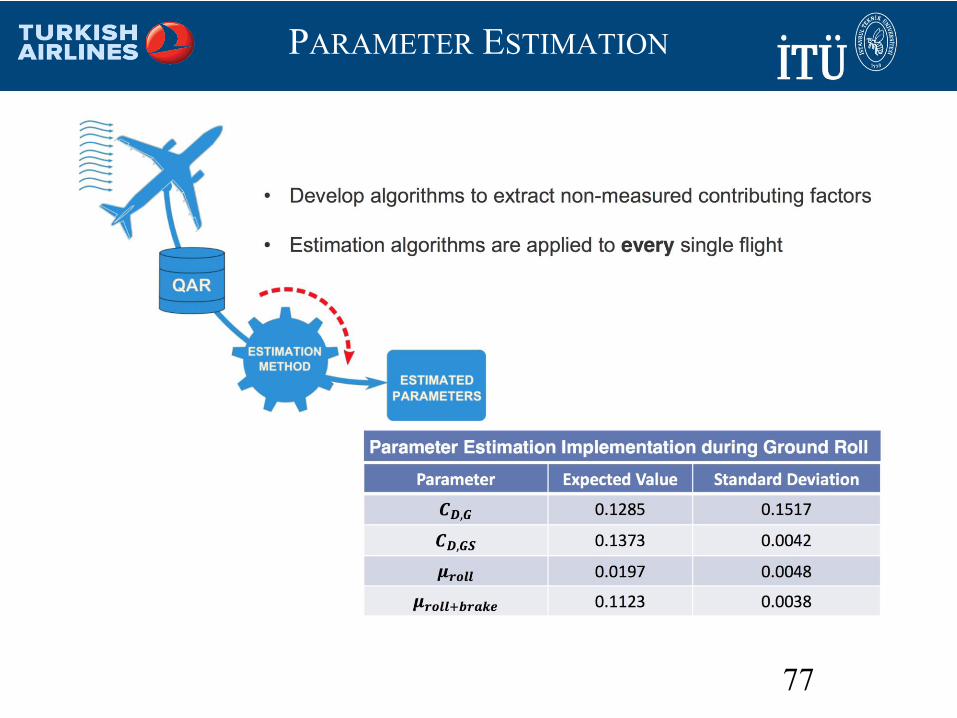
PROOF OF MODEL
78
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
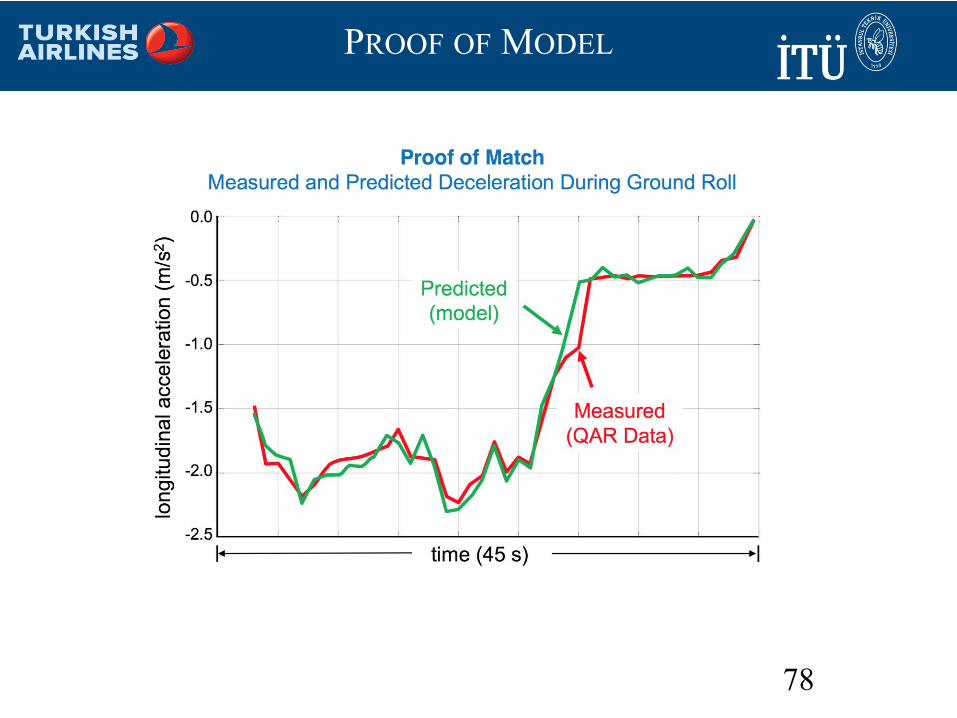
QUANTIFYING MAIN DRIVERS
79
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
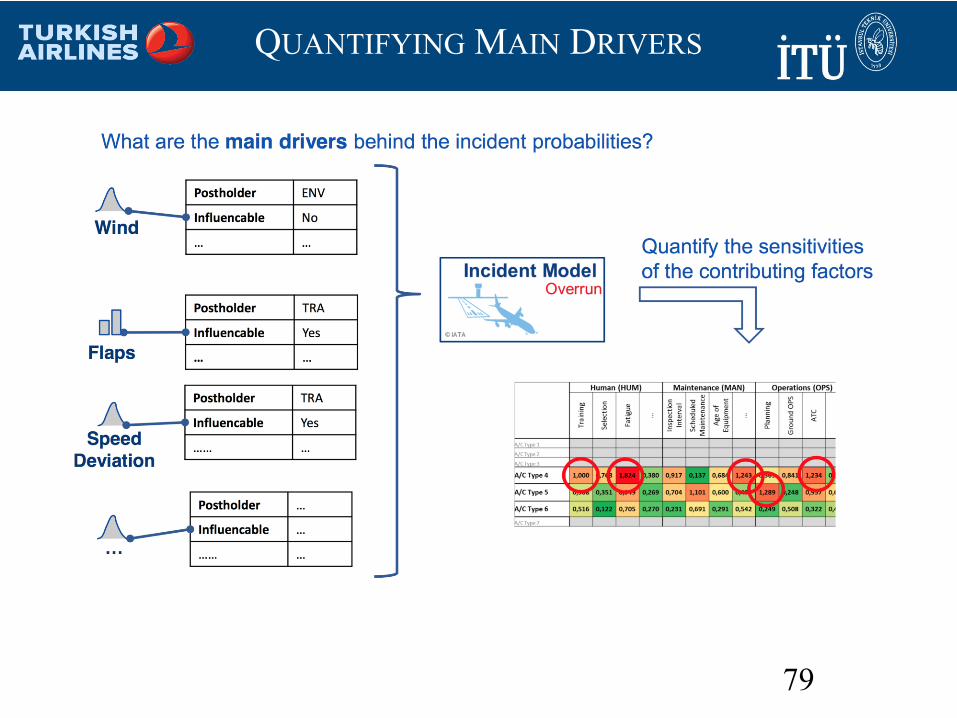
CHANGE MANAGEMENT
80
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
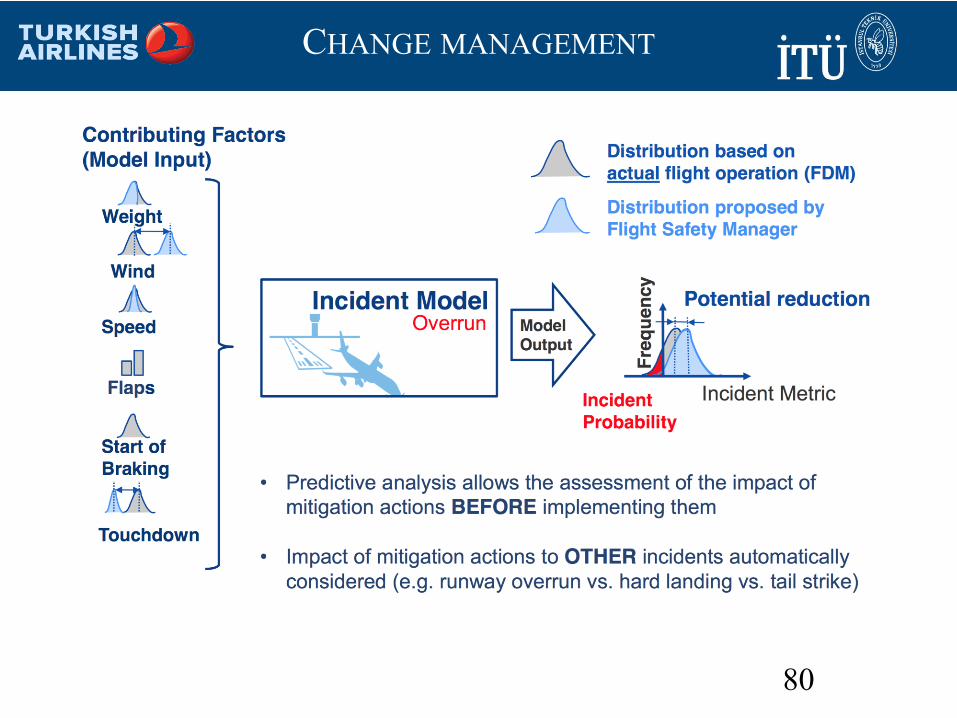
IDENTIFYING UNKNOWNS
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
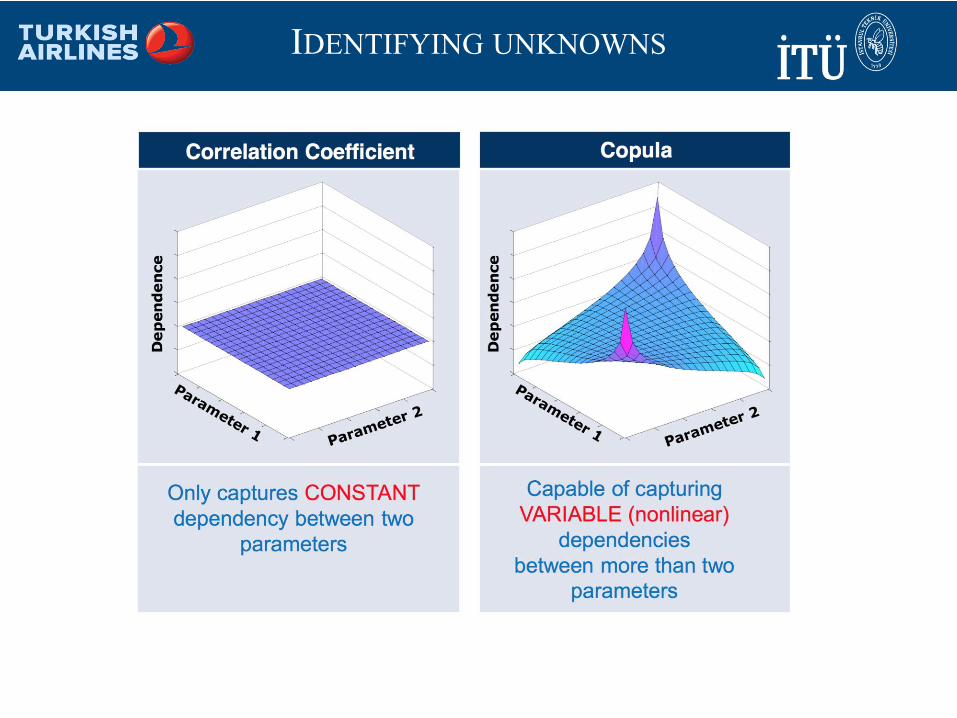
GAP ANALYSIS
82
PREDICTIVE INCIDENT ANALYSIS
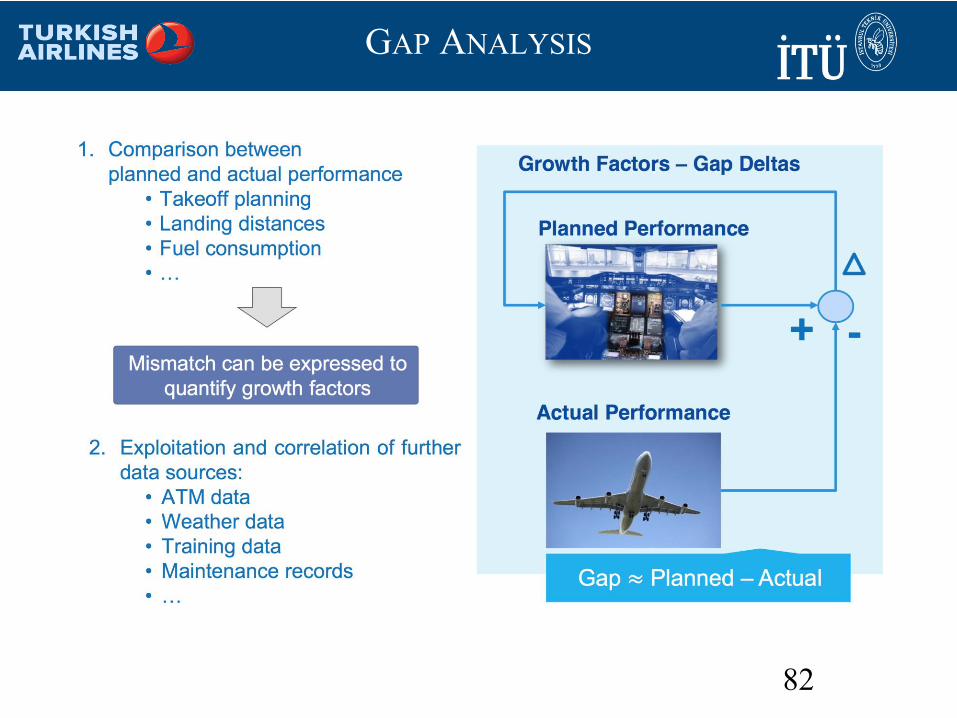
PREDICTIVE INCIDENT ANALYSIS

![Airfield Capacity - ITU AVIATION INSTITUTE Main Pageaviation.itu.edu.tr/img/aviation/datafiles/Lecture Notes/Air... · Airfield Capacity Prof. Amedeo Odoni ... Airbus 380 [560 tons],](https://static.fdocuments.net/doc/165x107/5a9f27997f8b9a71178c6478/airfield-capacity-itu-aviation-institute-main-notesairairfield-capacity-prof.jpg)
















