Cycloconverters Topologies
12
2786 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 55, NO. 7, JULY 2008 Current-Source Converter and Cycloconverter Topologies for Industrial Medium-Voltage Drives Bin Wu, Fellow, IEEE, Jorge Pontt, Senior Member, IEEE, José Rodríguez, Senior Member, IEEE, Steffen Bernet, Member, IEEE, and Samir Kouro, Member, IEEE Abstract—This paper, along with an earlier published paper as Part 1, provides a comprehensive review of the state of the art of high-power converters (above 1 MW) for adjustable-speed ac drives. In this highly active area, different converter topologies have been developed for various drive applications in the industry. Due to its extensive coverage, the subject is divided into two parts: multilevel voltage source and current source converter topologies. This paper is focused on the second part and covers the current source converter technologies, including pulsewidth-modulated current-source inverters (CSIs) and load-commutated inverters. In addition, this paper also addresses the present status of the direct converter, which is also known as cycloconverter (CCV). This paper focuses on the latest CSI and CCV technologies and an overview of the commonly used modulation schemes. It also provides the latest technological advances and future trends in CSI- and CCV-fed large drives. This paper serves as a useful reference for academic researchers and practicing engineers in the field of power converters and adjustable-speed drives. Index Terms—Current-source inverter (CSI), cycloconverter (CCV), high-power drives, load-commutated inverter (LCI). I. I NTRODUCTION P OWER converters for adjustable-speed drives can be clas- sified into direct and indirect converter topologies [1], [2]. In addition, indirect topologies can be grouped into two main categories: current- and voltage-source converters. The latter type of converters, particularly multilevel voltage-source converters, was previously addressed in the first part of this paper [3]. This paper will present the rest of the power con- verter topologies used in medium-voltage ac drives applications (2.3–13.8 kV), which appear in the darkened boxes of the classification shown in Fig. 1. For the direct converters, the cycloconverter (CCV) is the most used topology in high-power applications, which uses an array of power semiconductor switches to directly connect Manuscript received November 18, 2007; revised April 9, 2008. This work was supported in part by the Universidad Técnica Federico Santa María, in part by the Chilean National Fund of Scientific and Technological Development (FONDECYT) under Grant 1070725, and in part by the Industrial Electronics and Mechatronics Millenium Science Nucleus P04-048-F (Mideplan, ICM). B. Wu is with the Department of Electrical and Computer Engineering, Ryerson University, Toronto, ON M5B 2K3, Canada (e-mail: bwu@ee. ryerson.ca). J. Pontt, J. Rodríguez, and S. Kouro are with the Department of Electronics Engineering, Universidad Técnica Federico Santa María, Valparaíso 110-V, Chile (e-mail: [email protected]; [email protected]; [email protected]). S. Bernet is with the Power Electronics Group, Department of Electrical Engineering and Information Technology, Dresden University of Technology, 01069 Dresden, Germany (e-mail: [email protected]). Color versions of one or more of the figures in this paper are available online at http://ieeexplore.ieee.org. Digital Object Identifier 10.1109/TIE.2008.924175 the power supply to the machine, converting a three-phase ac voltage with a fixed magnitude and frequency to a three-phase ac voltage with variable magnitude and variable frequency [4]. It allows power flow in both directions in an efficient way. CCV drives are a mature technology with technical advantages in low-speed range and high-torque applications, such as grinding mills. Another example is a 400-MW hydropumped storage drive with a 20-pole generator/motor fed by a 72-MVA three- phase 12-pulse CCV [5]. Matrix converters also belong to this category but are not addressed in this paper since the power rating of these converters is only up to 150 kVA [6] until now, unable to reach the megawatt level for large drives due to the limitation of the bidirectional switching devices required by the converters. The indirect converters can be divided into voltage source and current source topologies, depending on the dc-link energy storage components. The voltage source converters normally use dc capacitors in the dc-link circuits, whereas the current source converters employ dc inductors (chokes) in the dc circuit. Current-source inverter (CSI) technology is well suited for high-power drives [7], [8]. The CSI can generally be divided into pulsewidth-modulation (PWM) CSI and load-commutated inverters (LCIs). The former uses symmetrical gate turn-off (GTO) or integrated gate-commutated thyristor (IGCT) as a switching device, whereas the latter inverter employs silicon- controlled rectifier (SCR) devices. Generally speaking, the current-source converters feature a simple converter struc- ture, low switch count, low switching dv/dt, and reliable overcurrent/short-circuit protection, as summarized in Table I. The main drawback lies in its limited dynamic performance due to the use of large dc choke. High-power CSI drives in the megawatt range are widely used in the industry. It is estimated that a minimum of 700 units of large CSI-fed drives has annually been produced worldwide in recent years. LCIs are one of the earliest inverters developed for variable- speed drives [9], [10]. Synchronous motors (SMs) are normally used in the LCI drives since the SCR switches in the inverter do not have self-turn-off capability and their commutation is assisted by the SM operating at a leading power factor. The LCI is suitable for very large drives with a power rating of tens of megawatts. This is mainly due to the use of SCR devices that lead to low manufacturing cost and high energy efficiency in comparison to the insulated-gate bipolar transistor or IGCT devices used in other types of drives. A typical example of the LCI drives is a 100-MW SM drive installed in NASA’s wind tunnel test facility [11]. 0278-0046/$25.00 © 2008 IEEE Authorized licensed use limited to: Universidad Tecnica Federico Santa Maria. Downloaded on December 18, 2008 at 14:36 from IEEE Xplore. Restrictions apply.
description
topología de cicloconvertidores
Transcript of Cycloconverters Topologies

2786 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 55, NO. 7, JULY 2008
Current-Source Converter and CycloconverterTopologies for Industrial Medium-Voltage Drives
Bin Wu, Fellow, IEEE, Jorge Pontt, Senior Member, IEEE, José Rodríguez, Senior Member, IEEE,Steffen Bernet, Member, IEEE, and Samir Kouro, Member, IEEE
Abstract—This paper, along with an earlier published paper asPart 1, provides a comprehensive review of the state of the artof high-power converters (above 1 MW) for adjustable-speed acdrives. In this highly active area, different converter topologieshave been developed for various drive applications in the industry.Due to its extensive coverage, the subject is divided into two parts:multilevel voltage source and current source converter topologies.This paper is focused on the second part and covers the currentsource converter technologies, including pulsewidth-modulatedcurrent-source inverters (CSIs) and load-commutated inverters.In addition, this paper also addresses the present status of thedirect converter, which is also known as cycloconverter (CCV).This paper focuses on the latest CSI and CCV technologies andan overview of the commonly used modulation schemes. It alsoprovides the latest technological advances and future trends inCSI- and CCV-fed large drives. This paper serves as a usefulreference for academic researchers and practicing engineers in thefield of power converters and adjustable-speed drives.
Index Terms—Current-source inverter (CSI), cycloconverter(CCV), high-power drives, load-commutated inverter (LCI).
I. INTRODUCTION
POWER converters for adjustable-speed drives can be clas-sified into direct and indirect converter topologies [1],
[2]. In addition, indirect topologies can be grouped into twomain categories: current- and voltage-source converters. Thelatter type of converters, particularly multilevel voltage-sourceconverters, was previously addressed in the first part of thispaper [3]. This paper will present the rest of the power con-verter topologies used in medium-voltage ac drives applications(2.3–13.8 kV), which appear in the darkened boxes of theclassification shown in Fig. 1.
For the direct converters, the cycloconverter (CCV) is themost used topology in high-power applications, which usesan array of power semiconductor switches to directly connect
Manuscript received November 18, 2007; revised April 9, 2008. This workwas supported in part by the Universidad Técnica Federico Santa María, inpart by the Chilean National Fund of Scientific and Technological Development(FONDECYT) under Grant 1070725, and in part by the Industrial Electronicsand Mechatronics Millenium Science Nucleus P04-048-F (Mideplan, ICM).
B. Wu is with the Department of Electrical and Computer Engineering,Ryerson University, Toronto, ON M5B 2K3, Canada (e-mail: [email protected]).
J. Pontt, J. Rodríguez, and S. Kouro are with the Department of ElectronicsEngineering, Universidad Técnica Federico Santa María, Valparaíso 110-V,Chile (e-mail: [email protected]; [email protected]; [email protected]).
S. Bernet is with the Power Electronics Group, Department of ElectricalEngineering and Information Technology, Dresden University of Technology,01069 Dresden, Germany (e-mail: [email protected]).
Color versions of one or more of the figures in this paper are available onlineat http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TIE.2008.924175
the power supply to the machine, converting a three-phase acvoltage with a fixed magnitude and frequency to a three-phaseac voltage with variable magnitude and variable frequency [4].It allows power flow in both directions in an efficient way. CCVdrives are a mature technology with technical advantages inlow-speed range and high-torque applications, such as grindingmills. Another example is a 400-MW hydropumped storagedrive with a 20-pole generator/motor fed by a 72-MVA three-phase 12-pulse CCV [5]. Matrix converters also belong to thiscategory but are not addressed in this paper since the powerrating of these converters is only up to 150 kVA [6] until now,unable to reach the megawatt level for large drives due to thelimitation of the bidirectional switching devices required by theconverters.
The indirect converters can be divided into voltage sourceand current source topologies, depending on the dc-link energystorage components. The voltage source converters normallyuse dc capacitors in the dc-link circuits, whereas the currentsource converters employ dc inductors (chokes) in the dccircuit.
Current-source inverter (CSI) technology is well suited forhigh-power drives [7], [8]. The CSI can generally be dividedinto pulsewidth-modulation (PWM) CSI and load-commutatedinverters (LCIs). The former uses symmetrical gate turn-off(GTO) or integrated gate-commutated thyristor (IGCT) as aswitching device, whereas the latter inverter employs silicon-controlled rectifier (SCR) devices. Generally speaking, thecurrent-source converters feature a simple converter struc-ture, low switch count, low switching dv/dt, and reliableovercurrent/short-circuit protection, as summarized in Table I.The main drawback lies in its limited dynamic performancedue to the use of large dc choke. High-power CSI drivesin the megawatt range are widely used in the industry. It isestimated that a minimum of 700 units of large CSI-fed driveshas annually been produced worldwide in recent years.
LCIs are one of the earliest inverters developed for variable-speed drives [9], [10]. Synchronous motors (SMs) are normallyused in the LCI drives since the SCR switches in the inverterdo not have self-turn-off capability and their commutation isassisted by the SM operating at a leading power factor. TheLCI is suitable for very large drives with a power rating of tensof megawatts. This is mainly due to the use of SCR devicesthat lead to low manufacturing cost and high energy efficiencyin comparison to the insulated-gate bipolar transistor or IGCTdevices used in other types of drives. A typical example of theLCI drives is a 100-MW SM drive installed in NASA’s windtunnel test facility [11].
0278-0046/$25.00 © 2008 IEEE
Authorized licensed use limited to: Universidad Tecnica Federico Santa Maria. Downloaded on December 18, 2008 at 14:36 from IEEE Xplore. Restrictions apply.

WU et al.: CURRENT-SOURCE CONVERTER AND CCV TOPOLOGIES FOR INDUSTRIAL MEDIUM-VOLTAGE DRIVES 2787
Fig. 1. Classification of converters for high-power drives (> 1 MW).
TABLE ICOMPARISON OF VOLTAGE- AND CURRENT-SOURCE CONVERTER TECHNOLOGIES
The succeeding sections present the different convertertopologies, drive configurations, and corresponding modulationschemes. The latest technological advancements and the futuretrends of the large drives are also addressed.
II. PWM CSIS
This section is mainly focused on CSI technology, includingPWM CSIs for induction motor drives and LCIs for SM drives.The PWM CSI can also be employed for SM drives. Since theCSI drive configuration for the SMs remains the same as thatfor the induction motors, the CSI-based synchronous drives arenot discussed here.
A. PWM-CSI-Fed AC Drives With SCRs
The PWM CSI was proposed in the early 1970s [12] andgained more attention during the 1980s [13]. The inverter usesswitching devices with self-extinguishable capability. Prior tothe advent of GCTs in the late 1990s, GTOs were predomi-nantly employed in high-power CSI drives [14], [15]. Fig. 2shows a typical 6600-V PWM CSI drive with an 18-pulse SCR.
The PWM CSI requires a three-phase capacitor Cf at itsoutput to assist the commutation of the switching devices. Thecapacitor provides a current path for the energy trapped inthe leakage inductances of the motor at the moment when aGTO or GCT in the inverter is turned off. Otherwise, a high-voltage spike would be induced, causing damage to the switch-ing devices. The capacitor also serves as a harmonic filter,
Fig. 2. Typical 6600-V PWM CSI drive with an 18-pulse SCR.
improving the motor current and voltage waveforms. The valueof capacitor is normally in the range of 0.3–0.5 per unit (p.u.)for CSI drives with a switching frequency of about 400 Hz.
Multipulse SCRs can be used as a front end for the CSIdrive. Among various rectifier topologies, the 18-pulse SCR isa preferred choice due to its high performance-to-price ratio.For a given voltage and power rating, the 12-pulse rectifier hasa cost advantage over the 18-pulse rectifier, but its line currenttotal harmonic dispersion (THD) may not meet the harmonicguidelines set by most standards. The 24-pulse rectifier has abetter line current THD than the 18-pulse rectifier, but it costs
Authorized licensed use limited to: Universidad Tecnica Federico Santa Maria. Downloaded on December 18, 2008 at 14:36 from IEEE Xplore. Restrictions apply.

2788 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 55, NO. 7, JULY 2008
more due to the increased number of SCR devices and complexphase-shifting transformer [16].
Six-pulse SCR bridges, which are used as current sourcerectifiers (CSRs) [17], can be connected in series to form themultipulse rectifier, as shown in Fig. 2, with three units foran 18-pulse configuration. The inverter side uses three series-connected GCT devices per branch. With a voltage rating of6500 V for SCRs and GCTs, the drive is capable of operatingat a utility voltage of 6600 V (line to line). The CSI drive withan 18-pulse rectifier can meet the harmonic requirements setby IEEE Standard 519-1992. Current source topologies mayalso be used for active power filters to compensate harmoniccurrents in electrical power systems [18], [19].
To improve the performance of the CSRs, advanced controlschemes, such as state feedback controls, can also be em-ployed [20].
B. Modulation Techniques
The switching pattern design for the CSI should generallysatisfy two conditions: 1) DC current id should be continuous,and 2) the inverter PWM current iw should be defined. Thetwo conditions can be translated into a switching constraint: Atany instant of time (excluding commutation intervals), there areonly two sets of series-connected switches conducting, i.e., oneset in the top half of the bridge such as S1 in Fig. 2 and the otherin the bottom half of the bridge such as S2. Various modulationtechniques have been developed for the PWM CSI, includingselective harmonic elimination (SHE), trapezoidal pulsewidthmodulation (TPWM), and space vector modulation (SVM).
The SHE is an offline modulation scheme that can eliminatea number of unwanted low-order harmonics in the inverterPWM current iw [21]. Because high-power applications requirelow losses, low switching frequency is needed. This is whythree, five, or seven switching angles per quarter of a cycleare preferred. In the case shown in Fig. 3(a), five pulses areemployed. The switching angles are precalculated and thenimported into a digital controller for implementation. Fig. 3(a)shows a typical SHE waveform that satisfies the CSI switchingconstraint. There are five pulses per half cycle with five switch-ing angles in the first π/2 period. However, only two out of thefive angles, i.e., θ1 and θ2, are independent. Given these twoangles, all other switching angles can be derived.
The two switching angles provide two degrees of freedom,which can be used either to eliminate two harmonics in iwwithout modulation index control or to eliminate one harmonicand provide an adjustable modulation index. The first option ispreferred since the adjustment of inverter output current iw isnormally accomplished by varying id through rectifier control,instead of inverter modulation index control. The switchingangles for the elimination of various current harmonics aregiven in [16].
Fig. 3(b) shows the principle of trapezoidal modulation,where vm is a trapezoidal modulating wave and vcr is a triangu-lar carrier wave. Similar to the carrier-based PWM schemes forvoltage-source inverters (VSIs), the gate signal is generated bycomparing vm with vcr. However, the trapezoidal modulationdoes not generate any gate signals in the center π/3 interval of
Fig. 3. Modulation schemes for CSIs: (a) SHE, (b) trapezoidal PWM, and(c) SVM.
the positive half cycle or in the negative half cycle of the inverterfundamental frequency. Such an arrangement can satisfy theswitching constraint mentioned earlier.
In addition to the TPWM and SHE schemes, the CSI can alsobe controlled by SVM [22]. A typical space vector diagram forthe CSI is shown in Fig. 3(c), where �I1–�I6 are active vectorsand �I0 is zero vector. The active vectors form a regular hexagonwith six equal sectors, whereas the zero vector �I0 lies at thecenter of the hexagon.
For a given length and position, �Iref can be synthesizedby three nearby stationary vectors, based on which switchingstates of the inverter can be selected and gate signals for theswitches can be generated. When �Iref passes through sectorsone by one, different sets of switches are turned on or off. Theinverter output frequency corresponds to the rotating speed of�Iref , whereas the magnitude of its output current can be adjustedby the length of �Iref .
The SVM scheme has not yet found practical applicationsmainly due to the following three facts: 1) The magnitude ofthe inverter output current is normally adjusted through therectifier, instead of the inverter modulation index; 2) the by-pass (shoot-through) operation of the SVM scheme will causeadditional switching losses; and 3) the harmonic performanceof the SVM is not as good as that of the SHE scheme. However,
Authorized licensed use limited to: Universidad Tecnica Federico Santa Maria. Downloaded on December 18, 2008 at 14:36 from IEEE Xplore. Restrictions apply.

WU et al.: CURRENT-SOURCE CONVERTER AND CCV TOPOLOGIES FOR INDUSTRIAL MEDIUM-VOLTAGE DRIVES 2789
Fig. 4. Switching frequency fsw versus inverter output frequency f1.
Fig. 5. CSI-fed drive with PWM rectifier and inverter.
the SVM scheme features easy digital implementation and su-perior dynamic performance. It can be used in future CSI driveswith time-critical control algorithms such as active dampingcontrol for LC resonance suppression [23].
A typical switching pattern arrangement for industrial CSIdrives is illustrated in Fig. 4, where fsw is the GCT switchingfrequency, f1 is the inverter fundamental output frequency,and Np is the number of pulses per half cycle of the inverterPWM current iw. The SHE scheme is used at high inverteroutput frequencies, whereas the TPWM scheme is utilizedwhen the motor operates at low speeds. The SHE schemehas much better harmonic performance than TPWM, but it isdifficult, if not impossible, to simultaneously eliminate morethan six harmonics. The harmonic performance of the TPWMhas minimal effects on the CSI drives since the drives normallyoperate at a frequency of above 30 Hz with the SHE scheme. Tominimize switching losses, the maximum switching frequencyof the inverter is normally below 500 Hz in industrial CSI drives[16]. The efficiency of the overall drive varies, depending on theinput rectifier configuration and the modulation method; it hasbeen reported that the CSI achieves efficiencies close to theirVSI counterparts [24].
C. PWM CSI-Fed AC Drives With PWM Rectifiers
Fig. 5 shows a typical configuration of the CSI drives witha single-bridge PWM CSR as a front end. The rectifier and in-verter have identical topologies using symmetrical GCTs. Withthe GCT voltage rating of 6500 V and two GCTs connected inseries in each of the converter branches, the drive is capable ofoperating at the utility voltage of 4160 V (line-to-line).
The PWM rectifier can use either the SVM or SHE schemes.The SHE scheme is preferred due to its superior harmonic
performance. With a switching frequency of 420 Hz and theutility frequency of 60 Hz, a maximum of three low-ordercurrent harmonics (the 5th, 7th, and 11th) can be eliminated.The other harmonics can be attenuated by the filter capacitor,leading to a low line current THD.
DC current id can be adjusted by the rectifier delay angle ormodulation index control. The delay angle control produces alagging power factor that can compensate the leading currentproduced by the filter capacitor, resulting in an improved powerfactor. Furthermore, when the CSI drive is used in fan or pumpapplications, its input power factor can be made to be nearunity over a wide speed range [25]. This can be realized byusing the SHE scheme with a delay angle control and properlyselecting the line- and motor-side filter capacitors. This controlscheme features a simple design procedure, easy digital imple-mentation, and reduced switching loss, and is implemented incommercial CSI drives.
Similar to the VSI drives, the rectification and inversionprocess in the CSI drive generates common-mode (CM) volt-ages [26], [27]. If not mitigated, the CM voltages would appearon the motor, causing premature failure of its winding insula-tion. The problem can effectively be solved by introducing anisolation transformer and grounding the neutral of the inverterfilter capacitor, as shown in Fig. 5. In doing so, the CM voltageswill be transferred to the transformer winding, and the motor isno longer subject to any CM voltages.
D. Transformerless CSI Drives
As discussed earlier, one of the major problems in CSI- andVSI-based medium voltage drives is the CM voltage, whichwould cause premature failure of motor winding insulation ifnot mitigated.
Generally speaking, there are four possible solutions tothe CM voltages in the current-source-fed drives. 1) Add anisolation transformer to block the CM voltages. This solutionhas a couple of added benefits: The leakage inductance of thetransformer can serve as a filter for harmonic reduction; and thetransformer may be arranged as a phase-shifting transformer formultipulse rectifiers for harmonic cancellation. 2) Add to thedc link an integrated dc choke that provides both differentialand CM inductances. The main advantage of this approach isthe low cost due to the elimination of the isolation transformer.3) Add a CM choke to the dc link for CM voltage suppression inaddition to the differential choke that is inherently required bycurrent-source-fed drives. 4) Add a three-phase ac CM reactoreither on the supply side or on the motor side to block theCM voltages. The first brings a few drawbacks such as highcost, increased drive size and weight, and high operating costdue to transformer power losses. The latter two solutions areconsidered not practical due to the high cost of additionalcomponents and the loss of the benefits that the isolation/phase-shifting transformer can provide. In summary, the inte-grated dc choke technology is a viable and practical solution forthe time being to the elimination of the isolation transformer ina current-source-fed drive.
Fig. 6 shows the schematic of a transformerless CSI drive,where an integrated dc choke with a single magnetic core and
Authorized licensed use limited to: Universidad Tecnica Federico Santa Maria. Downloaded on December 18, 2008 at 14:36 from IEEE Xplore. Restrictions apply.

2790 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 55, NO. 7, JULY 2008
Fig. 6. Transformerless CSI drive with an integrated dc choke.
four coils (two differential coils and two CM coils) is used[28]. The choke can provide two inductances: a differentialinductance Ld that is inherently required by the CSI drive anda CM inductance Lcm that can block the CM voltage. Theuse of the integrated dc choke leads to the elimination of theisolation transformer, resulting in a significant reduction inmanufacturing and operating costs. To ensure that the statorwinding of the motor is not subject to any CM voltages, theneutral points of the line- and motor-side filter capacitors aredirectly connected together or through a small RL network.
The concept of the integrated choke is verified on a low-power laboratory CSI drive. The laboratory drive has the sameconfiguration as that in Fig. 6, except that a six-pulse SCR wasused, instead of the PWM rectifier. The inverter operates ata fundamental frequency of 57.7 Hz with the filter capacitorof Cf = 0.31 p.u. The switching frequency of the inverter is180 Hz. The motor operates under no-load conditions, at whichthe CM voltage reaches its highest level.
Fig. 7 shows the measured waveforms of the drive with theintegrated dc choke installed, where vA is the stator line-to-ground voltage, vo is the stator neutral-to-ground voltage, andicm is the common current [16]. Fig. 7(a) shows the waveformsof the drive with Ld = 1.0 p.u. and Lcm = 0 (the CM coilsare not used). The neutral point of filter capacitor Cf is leftopen. The stator neutral-to-ground voltage vo, which shouldbe zero when the motor is powered by a three-phase utilitysupply, is essentially the total CM voltage vcm generated by therectifier and inverter. It contains triplen harmonics, which are ofzero-sequence components, with the third and sixth harmonicsbeing dominant. Line-to-ground voltage vA is composed of twocomponents: the motor phase (line-to-neutral) voltage vAo andits neutral-to-ground voltage vo. Obviously, the CM voltagesuperimposed on phase voltage vA is severely distorted withhigh peaks, causing damages to the motor insulation system.
With the CM coils connected in the drive (Lcm = 4.8 p.u.)and the capacitor neutral grounded, the measured waveformsare as shown in Fig. 7(b). Comparing with Fig. 7(a), we canmake two observations.
1) The waveform for vA is close to sinusoidal and free ofCM voltages. The CM voltage is fully blocked by the in-tegrated dc choke. This observation can be verified by thewaveform for vo (vo = vcm), which is essentially zero.
2) A small amount of CM current icm flows to groundthrough the filter capacitor. For the CSI drive with aPWM rectifier shown in Fig. 6, the CM current icm
Fig. 7. Waveforms measured from a laboratory CSI drive with an integrateddc choke: (a) Lcm = 0 and (b) Lcm = 4.8 p.u.
flows between the rectifier and inverter through the twocapacitor neutrals and therefore will not cause any neutralcurrent in the utility supply.
Finally, it should be noted that the design of the integrated dcchoke is not unique. A cost-effective design with only two coilson a magnetic core is currently employed in the transformerlessCSI drive, but the details of this choke cannot be releasedhere. This technology has been used in commercial CSI drivessince 2002 by one major manufacturer, Rockwell AutomationCanada. Another valid design is given in [29].
E. Parallel CSIs
To increase the power rating of a CSI-fed drive, two or moreCSIs can operate in a parallel manner [30]. Fig. 8 illustratessuch a configuration where two inverters are connected in par-allel. Each inverter has its own dc choke, but the two invertersshare a common filter capacitor Cf at their output.
The parallel operation of the two inverters may cause un-balanced dc currents. The main reasons for the unbalancedoperation include the following: 1) unequal ON-state voltages ofthe semiconductor devices, which affect steady-state dc current
Authorized licensed use limited to: Universidad Tecnica Federico Santa Maria. Downloaded on December 18, 2008 at 14:36 from IEEE Xplore. Restrictions apply.

WU et al.: CURRENT-SOURCE CONVERTER AND CCV TOPOLOGIES FOR INDUSTRIAL MEDIUM-VOLTAGE DRIVES 2791
Fig. 8. Parallel CSIs for large CSI drives.
balance; 2) variations in the time delay of the gating signals ofthe two inverters, which affects both transient and steady-statecurrent balance; and 3) manufacturing tolerance in dc chokeparameters. The dc current can be balanced by making use ofredundant switching states of the parallel inverters [16].
Fig. 9 shows a set of waveforms measured from a laboratoryparallel CSI drive operating at 1500 r/min. The dc currents i1and i3 in Fig. 9(a) are kept balanced by the drive controller,except for the middle portion of the current waveforms, wherethe current balance control algorithm is temporarily disabled.The steady-state motor voltage and current waveforms areshown in Fig. 9(b), which are close to sinusoidal. The parallelCSI technology can find applications in the CSI drives with apower rating of higher than 10 MW. However, while there arefunctional and cost advantages to a single dc link, having twoor more dc current supplies has advantages in terms of reliabil-ity, redundancy, and ac mains capability for canceling currentharmonics, which are issues that also need to be considered.
III. LCI-FED SM DRIVES
A. Topology Description
LCI is one of the earliest inverters developed for variable-speed drives [9], [10]. Fig. 10 shows a basic configuration of theLCI-fed SM drive. It is mainly composed of a phase-controlledrectifier and an SCR inverter. The rectifier provides an ad-justable dc current id, which is smoothed by a dc inductor Ld
and then feeds the inverter. Since the SCR device does not haveself-extinguishing capability, it can naturally be commutated byload voltage with a leading power factor. The ideal load forthe LCI is, therefore, SMs operating at a leading power factor,which can easily be achieved by adjusting rotor field current if .
The LCI is unable to use any PWM scheme. Inverter outputcurrent iA is of a quasi-square wave. However, the motorvoltage waveform vAB is close to sinusoidal superimposedwith voltage spikes caused by SCR commutations. The motorcurrent contains low-order harmonics, such as the 5th, 7th, 11th,and 13th. These harmonic currents cause torque pulsations, aswell as additional power losses in the motor [31].
The LCI-fed drive features low manufacturing cost and highefficiency due to the use of inexpensive SCR devices and lackof PWM operation. The LCI is suitable for very large driveswith a power rating of tens of megawatts, where the initial
Fig. 9. Measured inverter dc- and ac-side waveforms of the parallelconverters: (a) dc current transient response and (b) steady-state ac waveforms.
Fig. 10. Basic configuration of LCI-fed SM drive.
investment and operating efficiency are of great importance.However, the input power factor of the drive changes withits operating conditions. In addition, the rectifier input currentis highly distorted. In practical applications, the LCI drive isequipped with harmonic filters to reduce line current THD, asshown in Fig. 10. The filters can also serve as a power factorcompensator.
B. Latest Technology for Large LCI-Fed Drives
Fig. 11 shows a block diagram of a 100-MW variable-speedLCI-fed SM fan drive [32]. The power converter section of
Authorized licensed use limited to: Universidad Tecnica Federico Santa Maria. Downloaded on December 18, 2008 at 14:36 from IEEE Xplore. Restrictions apply.

2792 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 55, NO. 7, JULY 2008
Fig. 11. Block diagram of 100-MW LCI-fed drive system.
the drive consists of two independent channels, resulting in atotal of four identical six-pulse SCR bridges. To reduce theline current THD, the line-side bridges are configured as a12-pulse rectifier, where the 5th, 7th, 17th, and 19th harmoniccurrents produced by the six-pulse bridges are canceled by aphase-shifting transformer with 30◦ phase shift between its twosecondary windings.
The line current distortion can further be reduced by har-monic filters connected to the tertiary winding of the trans-former or active filters [33]. These series-resonant LC filtersare normally tuned to the 3rd, 5th, 11th, and 13th harmonicfrequencies to attenuate possible 3rd and 5th harmonic currentsproduced by the voltage distortion/unbalance of the utility gridand also to mitigate the 11th and 13th harmonic currents that arenot eliminated by the 12-pulse rectifier. Power factor correctioncan be achieved by the proper design of the LC filters [32].These filters can produce a leading current that can compensatethe lagging current produced by 12-pulsed rectifier.
Both the line-side and motor-side bridges can operate in rec-tifying or inverting mode, allowing the synchronous machineto operate as a motor or generator. For fast dynamic braking,the load mechanical energy can automatically be converted toelectrical energy by the LCI and then sent back to the utilitysupply.
The SM has two sets of stator windings with 30◦ electricalphase shift between the two windings. It is essentially a six-phase motor for the reduction of torque pulsations caused byquasi-square current waveforms in each of the stator windings.As a result, the torque pulsations and mechanical stress on theshaft train are greatly reduced.
The efficiency of the LCI drive is usually very high. Whenthe drive operates under the rated conditions, the converterefficiency can be higher than 99%. This is very importantin large drives, where a small reduction in energy efficiencytranslates into high operation costs.
Megawatt-range drives require high reliability due to down-time production losses. LCI-based drives have been a cost-effective solution for very large power applications foradjustable-speed drives; even its reliability comes close tothat of CCV drives [34]. Production losses due to converterunavailability in a typical grinding mill application can rise upto USD 17 000 per hour. Hence, fast and accurate detection anddiagnose of a fault can reduce emergency maintenance or trou-
bleshooting times. Some fault conditions due to asymmetricaloperation of a 12-pulse LCI drive and remedial strategies havebeen presented [35], [36]. A review of important failure sourcesinvolved in grinding mill applications is presented in [37]. In[38], the switching failure of CSIs is analyzed, and a detectionand protection method is presented, to avoid overcurrents andsystem damage.
C. Applications
Because of its simplicity and reliability, the LCI configura-tion is applied in large drives where high dynamical perfor-mance is not required, such as high-power fan drives, grindingmills, and high-power motor and generator starters. The start-ing function is very important for the black starting of largegenerators with island operation, especially for recovering aftera power blackout.
In a conventional LCI-fed drive, the drive can slowly bestarted by pulsing the dc-link current produced by the rectifier.This process continues until the SM generates sufficient in-duced voltage to naturally commutate the inverter. This methodfeatures no extra components but suffers a long starting time.To solve the problem, an LCI-fed commutatorless series motordrive has been proposed [39]. The drive is composed of a three-phase diode rectifier, an LCI, and an SM with its field windingconnected in series with the dc link. This unique design enablesthe drive to operate over the entire speed range, includingstartup, with better dynamic performance.
Another interesting application of LCIs has been pro-posed for a container ship [40], where a 24-pulse SCRrectifier–inverter system serves as a frequency converter. Thisconverter converts a voltage of 14 Hz to 25.7 Hz generated by ashaft generator to a bus voltage of 6.6 kV with a fixed frequencyof 60 Hz for the ship’s main distribution system. In addition,LCI-based medium-voltage ship electric propulsion is availablein the industry1 with 24- or 48-pulse configuration, from 0 to150 r/min and up to 2 × 21 MW.
IV. CCVS
A. Topology Description
Phase-controlled CCVs are direct ac–ac converters based onthe antiparallel connection of thyristor converters without a dclink employing a well-known and mature control technology ofnatural commutation, as described in [41] and [42].
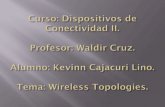
The basic operating principle is to use a switch arrange-ment, as shown in Fig. 12(a) (six-pulse CCV), to synthesizea variable-amplitude and low-frequency ac voltage by succes-sively connecting the load to the different phases of the acsupply Fig. 12(b).
The main advantages are the low switching losses and,therefore, high efficiency; the inherent bidirectional power flowcapability through the complete speed range; very high powerratings with low space requirement; simple and robust structure;low maintenance; and high reliability. The drawbacks are thelimited frequency range (� source frequency), low power
1[Online]. Available: www.industry.siemens.com.
Authorized licensed use limited to: Universidad Tecnica Federico Santa Maria. Downloaded on December 18, 2008 at 14:36 from IEEE Xplore. Restrictions apply.

WU et al.: CURRENT-SOURCE CONVERTER AND CCV TOPOLOGIES FOR INDUSTRIAL MEDIUM-VOLTAGE DRIVES 2793
Fig. 12. Six-pulse CCV: (a) power circuit (one phase) and (b) waveformsynthesis.
factor at low modulation indexes of about 0.8, and generation ofharmonic currents, which cause harmonic voltages in the powersupply network. Installation of filter circuits is often necessary.This has enabled the use of CCVs for the development of high-power drive systems for control in low-speed range and high-torque applications, such as cement mills, ore grinding mills,ship propulsion, and mine winders [34], [43].
This section highlights the applications in ore grinding mills,where near 60% of the electrical energy consumed in miningplants is employed by grinding mill drives in concentratorfacilities. Economy of scale pushes the trend for larger millsizes in the range of 11–21 MW, as presented in [37], withapplications for semiautogenous and Ball grinding mills. Themechanical limitations of girth gears have motivated the useof wraparound SMs for gearless motor drives (GMDs) fed byhigh-power CCVs operating with variable speed [37], [44],[45]. Fig. 13(a) presents the power circuit of a CCV-fed milldrive with an SM with a single three-phase winding, wheretwo sets of six-pulse CCVs fed by transformers with star-delta secondaries built a 12-pulse CCV, using 72 thyristors forreducing the harmonic interaction at the network and at themachine side. Double stator winding motors are also employed.
The voltage and current output waveforms of a 12-pulseCCV under steady-state operation are illustrated in Fig. 13(b)and (c), respectively. The controlled three-phase voltages andcurrents of the machine follow the references given by thecontrol system, to meet the position, speed, and torque requiredby the grinding process.
B. Latest Advances
In order to improve the performance and reliability ofCCV-fed drives, two current issues are being faced: network
Fig. 13. Twelve-pulse CCV feeding a synchronous machine with single statorwinding: (a) power circuit, (b) output voltages, and (c) controlled phase currentwith zero-crossing time of 2 ms.
harmonic interaction and commutation failures [46]–[49].Harmonic interaction and reactive power compensation aremitigated with proper modeling and filter design, including thebehavior of weak network and interharmonics, as described in[50]–[52]. The network harmonic interaction is mainly char-acterized by the injection of interharmonics and subharmonicscomponents by the CCV operation, which affects the powerquality of the supply. This important subject has been addressedin many contributions, including its analysis, modeling, simu-lation and experimental studies, harmonic reduction methods,and their impact on the power quality [52]–[58].
Loss of control of natural commutations under abnormaloperating conditions at the power network is a very importantweakness to be mitigated. A commutation failure can producea short circuit at the machine terminals through the CCV, as
Authorized licensed use limited to: Universidad Tecnica Federico Santa Maria. Downloaded on December 18, 2008 at 14:36 from IEEE Xplore. Restrictions apply.

2794 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 55, NO. 7, JULY 2008
Fig. 14. Application of CCV-fed gearless drives for mineral grinding mills.
described in [59]. At short-circuit condition, important forcescan be generated within the machine against the soil plates infundaments, resulting in system shutdown and even damages.This demands proper coordination of electrical protection andsizing of machine fundaments for avoiding stator frame dis-placement and friction between stator and rotor poles of themachine, as presented in [46]. In addition, harmonic torquecomponents may excite mechanical resonances [48]. Methodsfor mitigating these effects are under development.
In order to improve reliability and performance, current R&Dwork is dedicated to reduce the probability of such failures withimproved structural dynamics modeling with finite-elementanalysis for the following: 1) improved monitoring of the net-work and drive operating conditions; 2) improved electrical andmechanical robustness of the motor; 3) improved foundationsystem; and 4) improved control for eliminating the chance ofa two-phase short circuit at the machine terminals. In addition,improved process control of grinding within the mill is a currenttarget in order to smooth the load fluctuations and to gainbetter availability and reliability of the system, avoiding stressesand overloads. New instrumentation such as Impactmeter andSAGanalizer has been described in [48] and [50].
C. Applications
As mentioned earlier, CCVs are used for high-power low-speed applications, due to their high efficiency and speed-frequency limitations. They have found a special market:gearless cement mills, steel rolling mills, ore grinding mills,pumps and compressors, mine winders, and ship drives [60].Fig. 14 shows a simplified diagram of the semiautogenousgrinding mill process for copper production, in which fourCCV-fed gearless SM drives are controlled using space vectorcontrol [61].
Table II presents the typical parameters of an SM for a GMDmill drive of 12.7 MW, highlighting the estimation of the short-circuit torque as six times the rated torque.
As mentioned before, the CCV is also used in ship propulsion[62], [63]. Industrial available drives can be found in 6- and12-pulse configurations, with maximum power of 2 × 11 MWand speeds ranging from 0 to 190 r/min.1 The CCV can also befound in hydropumped storage [5] applications.
TABLE IITYPICAL PARAMETERS OF A SYNCHRONOUS MACHINE FOR A SAG MILL
V. FUTURE TREND
The current source converter technology has been usedin high-power adjustable-speed drives over the past twodecades. The drive technology has evolved with three majortechnological developments. In the late 1980s, the currentsource drive was composed of a 12- or 18-pulse SCR anda GTO PWM inverter operating at a switching frequency ofabout 200 Hz. This drive configuration was used until late1990s when the GCT device became commercially available,with which the GTO devices in the inverter were replaced. Inthe meantime, the switching frequency of the GCT inverter wasincreased to about 420 Hz. To overcome the drawbacks of theSCRs, the latest generation current source drive employs a GCTPWM rectifier with a GCT inverter. This drive configurationhas been on the market since 2003.
The use of the GCT rectifier incorporated with the integrateddc choke technology presented in the previous sections hasled to the elimination of the phase-shifting (or isolation) trans-former in the drive, resulting in significant cost reduction forthe drive manufacturer and end user as well. Considering theunique features of the current source drive, such as simple con-verter structure, reliable short-circuit protection, transformer-less design, and inherent four quadrant operation, it is expectedthat this drive technology will increasingly be used in variousindustrial applications in the future.
In today’s current source drives, the SHE technique is a dom-inant modulation scheme. When the drive operates at low motorspeeds, where it is very difficult to eliminate a large number oflow-order harmonics, the trapezoidal PWM can be employed.Although the SHE scheme provides a superior harmonic
Authorized licensed use limited to: Universidad Tecnica Federico Santa Maria. Downloaded on December 18, 2008 at 14:36 from IEEE Xplore. Restrictions apply.

WU et al.: CURRENT-SOURCE CONVERTER AND CCV TOPOLOGIES FOR INDUSTRIAL MEDIUM-VOLTAGE DRIVES 2795
performance in comparison to other modulation schemes, thisis an offline scheme with less flexibility and limited dynamicperformance.
With the improvements of GCT switching characteristics, itis expected that the SVM scheme with a switching frequencyof 500 Hz or higher will play a role in the future drives. Theincreased switching frequency will improve the harmonic anddynamic performance of the drive, whereas the flexibility ofthe SVM scheme will facilitate the implementation of advanceddrive control schemes. As a result, the current source drives canbe extended to other industrial applications that require highsystem dynamic performance.
On the other hand, CCVs are a mature and well-establishedtechnology. It seems that CCVs will still dominate high-powerlow-frequency operation applications for some years to come,due to their efficiency, reliability, and very high power ratingswith low space requirement. Despite the maturity of the tech-nology, power quality and interharmonic performance remaina topic of interest and study of many researchers [52]–[58].System monitoring, fault detection, and diagnosis are also sometrends under development for this technology [48], [59].
VI. CONCLUSION
With the recent technological advancements, high-poweradjustable-speed drives are increasingly used in industry. To-gether with the first part [3], this paper provides a com-prehensive overview of the state-of-the-art high-power drivetechnologies. This part focuses on current source converterand CCV technologies for high-power drives. Current-source-converter-fed drives are today’s converter family with the high-est power rating in industrial drive applications. CSI-PWMconverter drives offer new interesting performance, overcomingsome drawbacks of natural commutated LCI- and CCV-feddrives. However, LCI and CCV drives have a strong presencein the industry with a niche in very high power applications(>10 MW).
This paper covers various converter topologies and driveconfigurations. In addition, different PWM techniques werereviewed, latest drive technologies were discussed, and futuretrends were analyzed. This paper serves as a useful referencefor academic researchers and practicing engineers working inthe field of high-power converters and adjustable-speed drives.
REFERENCES
[1] K. H. J. Chong and R. D. Klug, “High power medium voltage drives,” inProc. PowerCon, Nov. 21–24, 2004, vol. 1, pp. 658–664.
[2] R. D. Klug and N. Klaassen, “High power medium voltage drives—Innovations, portfolio, trends,” in Proc. Eur. Conf. Power Electron. Appl.,Sep. 11–14, 2005, 10 pp.
[3] J. Rodríguez, S. Bernet, B. Wu, J. Pontt, and S. Kouro, “Multilevelvoltage-source-converter topologies for industrial medium-voltagedrives,” IEEE Trans. Ind. Electron., vol. 54, no. 6, pp. 2930–2945,Dec. 2007.
[4] M. H. Rashid, Power Electronics Handbook, 2nd ed. New York:Academic, 2006.
[5] H. Akagi, “The state-of-the-art of power electronics in Japan,” IEEETrans. Power Electron., vol. 13, no. 2, pp. 345–356, Mar. 1998.
[6] T. Podlesak, D. Katsis, P. Wheeler, J. Clare, L. Empringham, andM. Bland, “A 150-kVA vector-controlled matrix converter induction
motor drive,” IEEE Trans. Ind. Appl., vol. 41, no. 3, pp. 841–847,May/Jun. 2005.
[7] M. Salo and H. Tuusa, “A vector-controlled PWM current-source-inverter-fed induction motor drive with a new stator current control method,” IEEETrans. Ind. Electron., vol. 52, no. 2, pp. 523–531, Apr. 2005.
[8] P. Cancelliere, V. D. Colli, R. Di Stefano, and F. Marignetti, “Model-ing and control of a zero-current-switching DC/AC current-source in-verter,” IEEE Trans. Ind. Electron., vol. 54, no. 4, pp. 2106–2119,Aug. 2007.
[9] S. D. Sudhoff, E. L. Zivi, and T. D. Collins, “Start up performance ofload-commutated inverter fed synchronous machine drives,” IEEE Trans.Energy Convers., vol. 10, no. 2, pp. 268–274, Jun. 1995.
[10] N. Mohan, T. M. Undeland, and W. P. Robbins, PowerElectronics—Converters, Applications and Design, 2nd ed. Hoboken,NJ: Wiley, 1995.
[11] R. Bhatia, H. U. Krattiger, A. Bonanini et al., “Adjustable speed drivewith a single 100-MW synchronous motor,” ABB Rev., no. 6, pp. 14–20,1998.
[12] K. P. Phillips, “Current-source converter for AC motor drives,” IEEETrans. Ind. Appl., vol. IA-8, no. 6, pp. 679–683, Nov./Dec. 1972.
[13] M. Hombu, S. Ueda, and A. Ueda, “A current source GTO inverter withsinusoidal inputs and outputs,” IEEE Trans. Ind. Appl., vol. IA-23, no. 2,pp. 247–255, Mar. 1987.
[14] P. Espelage, J. M. Nowak, and L. H. Walker, “Symmetrical GTO currentsource inverter for wide speed range control of 2300 to 4160 Volts, 350 to7000 HP induction motors,” in Conf. Rec. IEEE IAS Annu. Meeting, 1988,pp. 302–307.
[15] N. R. Zargari, S. C. Rizzo et al., “A new current-source converter using asymmetric gate-commutated thyristor (SGCT),” IEEE Trans. Ind. Appl.,vol. 37, no. 3, pp. 896–903, May/Jun. 2001.
[16] B. Wu, High-Power Converters and AC Drives. Piscataway, NJ: IEEEPress, 2006.
[17] S. Rees, “New cascaded control system for current-source rectifiers,”IEEE Trans. Ind. Electron., vol. 52, no. 3, pp. 774–784, Jun. 2005.
[18] B. M. Han and S. I. Moon, “Static reactive-power compensator using soft-switching current-source inverter,” IEEE Trans. Ind. Electron., vol. 48,no. 6, pp. 1158–1165, Dec. 2001.
[19] M. Salo and H. Tuusa, “A new control system with a control delaycompensation for a current-source active power filter,” IEEE Trans. Ind.Electron., vol. 52, no. 6, pp. 1616–1624, Dec. 2005.
[20] A. Klönne and F. W. Fuchs, “Optimal state feedback control of a vec-tor controlled current source rectifier,” in Proc. 9th EPE, Graz, Austria,Aug. 27–29, 2001.
[21] J. R. Espinoza, G. Joos, J. I. Guzman, L. A. Moran, and R. P. Burgos,“Selective harmonic elimination and current/voltage control in current/voltage-source topologies: A unified approach,” IEEE Trans. Ind.Electron., vol. 48, no. 1, pp. 71–81, Feb. 2001.
[22] J. Ma, B. Wu, and S. Rizzo, “A space vector modulated CSI-based ACdrive for multimotor applications,” IEEE Trans. Power Electron., vol. 16,no. 4, pp. 535–544, Jul. 2001.
[23] J. Wiseman, B. Wu, and G. S. P. Castle, “A PWM current source rectifierwith active damping for high power medium voltage applications,” inProc. IEEE PESC, 2002, pp. 1930–1934.
[24] Y. Suh, J. K. Steinke, and P. K. Steimer, “Efficiency comparison ofvoltage-source and current-source drive systems for medium-voltage ap-plications,” IEEE Trans. Ind. Electron., vol. 54, no. 5, pp. 2521–2531,Oct. 2007.
[25] Y. Xiao, B. Wu, and N. Zargari, “Design of line/motor side capacitorsfor PWM CSR-CSI drives to achieve optimal power factor in high powerfan/pump applications,” in Proc. IEEE Appl. Power Electron. Conf., 1997,pp. 333–337.
[26] J. Rodríguez, L. Moran, J. Pontt, R. Osorio, and S. Kouro, “Modeling andanalysis of common-mode voltages generated in medium voltage PWM-CSI drives,” IEEE Trans. Power Electron., vol. 18, no. 3, pp. 873–879,May 2003.
[27] S. Wei, N. Zargari, B. Wu et al., “Comparison and mitigation of commonmode voltages in power converter topologies,” in Conf. Rec. IEEE IASAnnu. Meeting, 2004, pp. 1852–1857.
[28] B. Wu, S. Rizzo, N. Zargari, and Y. Xiao, “An integrated DC link chokefor elimination of motor common-mode voltage in medium voltagedrives,” in Conf. Rec. IEEE IAS Annu. Meeting, Chicago, IL, 2001, vol. 3,pp. 2022–2027.
[29] P. Hammond, “Apparatus and method to reduce common mode voltagefrom current source drive,” U.S. Patent 5 905 642, May 18, 1999.
[30] D. Xu, N. Zargari, B. Wu et al., “A medium voltage AC drive withparallel current source inverters for high power applications,” in Proc.IEEE PESC, 2005, pp. 2277–2283.
Authorized licensed use limited to: Universidad Tecnica Federico Santa Maria. Downloaded on December 18, 2008 at 14:36 from IEEE Xplore. Restrictions apply.

2796 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 55, NO. 7, JULY 2008
[31] R. Emery and J. Eugene, “Harmonic losses in LCI-fed synchronous mo-tors,” IEEE Trans. Ind. Appl., vol. 38, no. 4, pp. 948–954, Jul./Aug. 2002.
[32] R. Bhatia, H. Krattiger, A. Bonanini, D. Schafer, J. T. Inge, andG. H. Sydnor, “Adjustable speed drive using a single 135 000 HP synchro-nous motor,” IEEE Trans. Energy Convers., vol. 14, no. 3, pp. 571–576,Sep. 1999.
[33] S. Kwak and H. A. Toliyat, “Current-source-rectifier topologies for sinu-soidal supply current: Theoretical studies and analyses,” IEEE Trans. Ind.Electron., vol. 53, no. 3, pp. 984–987, Jun. 2006.
[34] H. Stemmler, “High-power industrial drives,” Proc. IEEE, vol. 82, no. 8,pp. 1266–1286, Aug. 1994.
[35] A. N. Alcaso and A. J. M. Cardoso, “Asymmetrical operation of a twelve-pulse LCI drive system with power converter faults,” in Proc. 35th Annu.IEEE PESC, Jun. 20–25, 2004, vol. 6, pp. 4378–4382.
[36] A. N. Alcaso and A. J. M. Cardoso, “Remedial operating strategies for atwelve-pulse LCI drive system,” in Proc. IEEE Int. Conf. Ind. Technol.,Dec. 10–12, 2003, vol. 1, pp. 619–624.
[37] J. Rodríguez, J. Pontt, P. Newman, R. Musalem, L. Morán, andG. Alzamora, “Technical evaluation and practical experience of highpower grinding mill drives in mining applications,” IEEE Trans. Ind.Appl., vol. 41, no. 3, pp. 866–874, May/Jun. 2005.
[38] J. Pontt, J. Rodríguez, J. Rebolledo, J. San Martín, E. Cid, andG. Figueroa, “High-power LCI grinding mill drive under faulty condi-tions,” in Conf. Rec. IEEE IAS Annu. Meeting, Oct. 2–6, 2005, vol. 1,pp. 670–673.
[39] S. SenGupta, K. Mukherjee, T. Kumar Bhattacharya, and A. K.Chattopadhyay, “Performance of an SCR-inverter-based commutatorlessseries motor with load commutation and unaided startup capability,” IEEETrans. Ind. Appl., vol. 36, no. 4, pp. 1151–1157, Jul./Aug. 2000.
[40] B. Clegg, H. R. Griffiths, D. J. Hall, and P. J. Tavner, “The application ofdrives and generator technology to a moderncontainer ship,” in Proc. 9thInt. Conf. Elect. Mach. Drives, 1999, pp. 312–316.
[41] B. R. Pelly, Thyristor Phase-Controlled Converters and Cycloconverters.Hoboken, NJ: Wiley, 1971.
[42] L. Gyugi and B. R. Pelly, Static Power Frequency Changers. Hoboken,NJ: Wiley, 1976.
[43] H. Akagi, “Large static converters for industry and utility applications,”Proc. IEEE, vol. 89, no. 6, pp. 976–983, Jun. 2001.
[44] S. A. Greer, “Selection criteria for SAG mill drive systems,” IEEE Trans.Ind. Appl., vol. 26, no. 5, pp. 901–908, Sep./Oct. 1990.
[45] J. Regitz, “Evaluation of mill drive options,” IEEE Trans. Ind. Appl.,vol. 32, no. 3, pp. 653–662, May/Jun. 1996.
[46] C. Meimaris, B. Lai, and L. Cox, “Remedial design of the world’slargest SAG mill gearless drive,” in Proc. Int. Conf. SAG, Vancouver, BC,Canada, 2001, pp. 74–83.
[47] J. Pontt, J. Rodríguez, W. Valderrama, G. Sepúlveda, P. Chavez,B. Cuitino, P. Gonzalez, and G. Alzamora, “Current issues on high-powercycloconverter-fed gearless motor drives for grinding mills,” in Proc.IEEE ISIE, Jun. 9–11, 2003, vol. 1, pp. 369–374.
[48] J. Pontt, F. Rojas, J. Rodríguez, J. Rebolledo, J. San Martín, I. Illanes,E. Cáceres, R. Aguilera, P. Newman, and W. Valderrama, “Issues onreliability of cycloconverter-fed high-power gearless mill drives,” in Proc.Comminution, Perth, Australia, Mar. 14–18, 2006.
[49] L. Nieto and M. Ahrens, “Gearless mill drive protection improvementsand its behaviour at minera escondida ltda.,” in Conf. Rec. IEEE IAS Annu.Meeting, Sep. 23–27, 2007, pp. 1766–1772.
[50] J. Pontt, J. Rodríguez, W. Valderrama, and G. Sepúlveda, “Resonanceeffects, power quality and reliability issues of high-power converters-feddrives employed in modern SAG circuits,” Miner. Eng., vol. 17, no. 11/12,pp. 1125–1134, Nov./Dec. 2004.
[51] R. Errath, P. Burmeister, and A. Sapin, “SAG mill operation with weaknetwork conditions,” in Proc. Int. Conf. SAG, Vancouver, BC, Canada,2001. CD-ROM.
[52] J. Pontt, J. Rodríguez, J. San Martín, R. Aguilera, J. Rebolledo,E. Caceres, I. Illanes, and P. Newman, “Interharmonic currents assessmentin high-power cycloconverter-fed drives,” in Proc. IEEE PESC, Jeju,Korea, Jun. 2006, pp. 1–6.
[53] P. Syam, P. K. Nandi, and A. K. Chattopadhyay, “Improvement inpower quality and a simple method of subharmonic suppression fora cycloconverter-fed synchronous motor drive,” Proc. Inst. Electr.Eng.—Electr. Power Appl., vol. 149, no. 4, pp. 292–303, Jul. 2002.
[54] P. Syam, G. Bandyopadhyay, P. K. Nandi, and A. K. Chattopadhyay,“Simulation and experimental study of interharmonic performance ofa cycloconverter-fed synchronous motor drive,” IEEE Trans. Energy.Convers., vol. 19, no. 2, pp. 325–332, Jun. 2004.
[55] P. Syam, P. K. Nandi, and A. K. Chattopadhyay, “Effect of output cur-rent ripple on the input supply current and the power quality for a
cycloconverter-fed drive,” Proc. Inst. Electr. Eng.—Electr. Power Appl.,vol. 151, no. 4, pp. 425–433, Jul. 2004.
[56] Y. Liu, G. T. Heydt, and R. F. Chu, “The power quality impact of cy-cloconverter control strategies,” IEEE Trans. Power Del., vol. 20, no. 2,pp. 1711–1718, Apr. 2005.
[57] Z. Wang and Y. Liu, “Modeling and simulation of a cycloconverter drivesystem for harmonic studies,” IEEE Trans. Ind. Electron., vol. 47, no. 3,pp. 533–541, Jun. 2000.
[58] P. Syam and A. K. Chattopadhyay, “Discussion of ‘The power qualityimpact of a cycloconverter control strategies’,” IEEE Trans. Power Del.,vol. 21, no. 3, p. 1758, Jul. 2006.
[59] J. Pontt, J. Rodríguez, J. Rebolledo, K. Tischler, and N. Becker, “Op-eration of high power cycloconverter-fed gearless drives under abnor-mal conditions,” IEEE Trans. Ind. Appl., vol. 43, no. 3, pp. 814–820,May/Jun. 2007.
[60] A. K. Chattopadhyay, “Cycloconverters and cycloconverterfed drives: Areview,” J. Ind. Hist. Sci., vol. 77, no. 5, pp. 397–419, 1997.
[61] W. Leonard, Control of Electrical Drives. New York: Springer-Verlag,1997.
[62] P. English, “The evolution of marine and drilling drives in today’smarket,” in Proc. Dynamic Positioning Conf., Sep. 18–19, 2001.CD-ROM.
[63] D. Gritter, S. Kalsi, and N. Henderson, “Variable speed drive optionsfor electric ships,” in Proc. IEEE Elect. Ship Technol. Symp., 2005,pp. 354–357.
Bin Wu (S’89–M’92–SM’99–F’08) received thePh.D. degree in electrical and computer engineer-ing from the University of Toronto, Toronto, ON,Canada, in 1993.
From 1992 to 1993, he was with Rockwell Au-tomation as a Senior Engineer. He joined RyersonUniversity, Toronto, where he is currently a Professorwith the Department of Electrical and ComputerEngineering and the Natural Sciences and Engineer-ing Research Council of Canada (NSERC) and theRockwell Industrial Research Chair in Power Elec-
tronics and Electric Drives. He is also the Founder of the Laboratory forElectric Drive Applications and Research (LEDAR), Ryerson University. Hehas published more than 140 technical papers and a Wiley-IEEE Press book.He is the holder of 16 patent disclosures in the area of power electronics, energysystems, advanced controls, and adjustable-speed drives.
Dr. Wu is a Fellow of the Engineering Institute of Canada. He is anAssociate Editor for the IEEE TRANSACTIONS ON POWER ELECTRONICS
and the IEEE Canadian Review. He is a Registered Professional Engineer inthe Province of Ontario, Canada. He was the recipient of the Gold Medal ofthe Governor General of Canada, the Premier’s Research Excellence Award,Ryerson Distinguished Scholar Award, Ryerson Research Chair Award, andthe NSERC Synergy Award for Innovation.
Jorge Pontt (M’00–SM’04) received the Engi-neer and M.S. degrees in electrical engineeringfrom the Universidad Técnica Federico Santa María(UTFSM), Valparaíso, Chile, in 1977.
Since 1977, he has been a Professor with theDepartment of Electrical Engineering and the De-partment of Electronics Engineering, UTFSM, underthe R&D and graduate program of power electronics.He leads the Laboratory for Reliability and PowerQuality, UTFSM (LACSE) and is currently the Di-rector of the Millennium Nucleus on Industrial Elec-
tronics and Mechatronics (NEIM), UTFSM. He is a coauthor of the softwareHarmonix, which is used in harmonic studies in electrical systems. He is alsoa Consultant in the mining industry, particularly in the design and applicationof power electronics, drives, instrumentation systems, and power quality issues,with management of more than 80 consulting and R&D projects. He has hadscientific stays at the Technische Hochschule Darmstadt, Darmstadt, Germany(1979–1980); the University of Wuppertal, Wuppertal, Germany (1990); andthe University of Karlsruhe, Karlsruhe, Germany (2000–2001). He is aCofounder of the spin-off company ETT Ltda. (Chile) related to instrumen-tation for large grinding mills. He has published more than 100 refereed journaland conference proceeding papers.
Authorized licensed use limited to: Universidad Tecnica Federico Santa Maria. Downloaded on December 18, 2008 at 14:36 from IEEE Xplore. Restrictions apply.

WU et al.: CURRENT-SOURCE CONVERTER AND CCV TOPOLOGIES FOR INDUSTRIAL MEDIUM-VOLTAGE DRIVES 2797
José Rodríguez (M’81–SM’94) received the Engi-neer degree from the Universidad Técnica FedericoSanta María, Valparaíso, Chile, in 1977, and theDr.-Ing. degree from the University of Erlangen,Erlangen, Germany, in 1985, both in electricalengineering.
Since 1977, he has been with the Depart-ment of Electronics Engineering, University TécnicaFederico Santa María, where he is currently aProfessor. From 2001 to 2004, he was the Directorof the Department of Electronics Engineering. From
2004 to 2005, he served as Vice Rector of academic affairs, and since 2005, hehas been the Rector of the university. During his sabbatical leave in 1996, hewas responsible for the Mining Division, Siemens Corporation, Santiago, Chile.He has extensive consulting experience in the mining industry, particularly inthe application of large drives such as cycloconverter-fed synchronous motorsfor SAG mills, high-power conveyors, and controlled ac drives for shovels andpower quality issues. He has directed more than 40 R&D projects in the field ofindustrial electronics. He has coauthored more than 250 journal and conferenceproceeding papers and contributed one book chapter. His research group hasbeen recognized as one of the two centers of excellence in engineering in Chilefrom 2005 to 2008. His main research interests include multilevel inverters, newconverter topologies, and adjustable-speed drives.
Prof. Rodríguez has been an active Associate Editor for the IEEE PowerElectronics and IEEE Industrial Electronics Societies since 2002. He has servedas Guest Editor for the IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS
in four instances [Special Sections on Matrix Converters (2002), MultilevelInverters (2002), Modern Rectifiers (2005), and High Power Drives (2007)].
Steffen Bernet (M’97) received the Diploma de-gree from Dresden University of Technology,Dresden, Germany, in 1990, and the Ph.D. degreefrom Ilmenau University of Technology, Ilmenau,Germany, in 1995, both in electrical engineering.
In 1995 and 1996, he was a Postdoctoral Re-searcher with the Department of Electrical andComputer Engineering, University of Wisconsin,Madison. In 1996, he joined ABB Corporate Re-search, Heidelberg, Germany, where he led the Elec-trical Drive Systems Group. From 1999 to 2000, he
was responsible for the ABB research worldwide in the areas power electronicssystems, drives, and electric machines. From 2001 to 2007, he was a Professorof power electronics with Berlin University of Technology, Berlin, Germany.Since June 2007, he has been a Professor with the Power Electronics Group,Department of Electrical Engineering and Information Technology, DresdenUniversity of Technology. During the past 17 years, he has conducted com-prehensive research on power semiconductors, static power converters, andac motor drives. He has published more than 70 papers in the field of powerelectronics.
Dr. Bernet was the recipient of the 2005 Second Prize Paper Award at IEEEPESC and Committee Second Prize Paper Awards from the Industrial PowerConverter Committee and the Power Electronic Devices and ComponentsCommittee of the IEEE Industry Applications Society.
Samir Kouro (S’04–M’08) was born in Valdivia,Chile, in 1978. He received the M.Sc. and Ph.D.degrees in electronics engineering from the Uni-versidad Técnica Federico Santa María (UTFSM),Valparaíso, Chile, in 2004 and 2008, respectively.
In 2004, he joined the Department of ElectronicsEngineering, UTFSM, as a Research Assistant, andis currently an Associate Researcher. His researchinterests include power converters and adjustable-speed drives.
Dr. Kouro was distinguished as the youngestresearcher in Chile being granted a government-funded research project(FONDECYT) as Principal Researcher in 2004.
Authorized licensed use limited to: Universidad Tecnica Federico Santa Maria. Downloaded on December 18, 2008 at 14:36 from IEEE Xplore. Restrictions apply.