Cubic Shells

of 8
-
Upload
pauloandressepulveda -
Category
Documents
-
view
220 -
download
0
Transcript of Cubic Shells
-
8/6/2019 Cubic Shells
1/8
-
8/6/2019 Cubic Shells
2/8
Garg, Grinspun, Wardetzky, and Zorin / Cubic Shells
2. Isotropic bending
2.1. Smooth setting
Consider a surface deformed away from its natural (un-deformed) shape. To this deformation we associate the
isotropic bending energy
Eb(x) =1
2
ZS
(HH)2dA . (1)
This is the integral, over the undeformed surface, of thesquared change in mean curvature. Here x is the position ofthe deformed surface, and H is the mean curvature functionof the deformed surface. A bar (e.g., H) denotes the cor-responding quantity evaluated on the undeformed surface.Whereas we consider arbitrary undeformed shapes, the spe-cial case of flat undeformed shapes (H = 0) was explored byBergou et al. [BWH06].
Although not immediately apparent from (1), Eb(x) is ac-
tually a cubic polynomial in x under isometric deformations,i.e., if the surface is allowed to bend but not to stretch. Tosee this, rewrite (1) as
Eb(x) =1
2
ZS
H, H2H,Hn+H
2
dA . (2)
Here , denotes the standard inner product in 3-space, andH = Hn stands for the mean curvature normal, a vector par-allel to the surfaces unit normal, n. Bergou et al. observedthat the mean curvature vector can be expressed as H = x,i.e., the surfaces intrinsic Laplacian applied to the positionof the surface. For isometric deformations of the surface, twofacts follow: (F1) Since is intrinsic, H is linear in surface
position, thus H, H is quadratic in x [BWH
06]. (F2) Thesurface normal is quadratic in x; therefore, H,Hn is cu-bic. It follows that Eb(x) is a cubic polynomial in x, because
H,Hn is cubic, H, H is quadratic, and H2
does not de-pend on x. While Bergou et al. discussed (F1) for thin plates(H = 0), (F2) is unique to shells (H= 0) and presents ourcentral technical challenge.
The cubic shells idea is to develop a discrete analogue ofthis picture.
2.2. Discrete setting
Consider a triangle mesh whose shape before deformation is
given by the vector of vertex positions x. When the mesh isdeformed to position x, the usual hinge-based bending en-ergy [BW98, BMF03, GHDS03, BWH06, TW06] is given
To see that n is quadratic, write n = xu
xv
, and observe that
orthonormality of tangent vectors, xu
and xv
, is preserved underisometric deformations.
T0
e0
e3e1
x0
x2
x1
0103
t1 t3
t0(0)
e0
e2 e4
e3e1
x0
x2
x1
x3
T001
02
03
04
T1
x3
x0 x102
04
t2 t4
t0(1)
e0e2 e4T1
x3
n(1)
t0(1)
t0(0)
x2
profile viewx0
x2
x1
x3
n(0) n(1)
t0(0)
t0(1)
0x
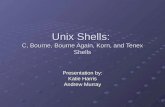
Figure 1: Top-left: Hinge stencil for an interior edge. Top-middle and -right: Perpendicular vectors used in the compu-tation. Bottom: Hinge in 3-space with corresponding labels.
by
Eb(x) =1
2 i
3|ei|2
Ai
2sin
i i2
2. (3)
Here the sum is taken over all interior edges, Ai denotes thecombined area of the two triangles incident to edge ei, andi denotes the dihedral angle at edge i.
Our goal is to establish an important, and previously over-looked, property of (3): under isometric deformations, it is acubic polynomial in x. This observation will expose a much
more efficient implementation than is directly evident from(3); for details on this implementation, refer directly to 5.
The discrete energy (3) can be written as a sum over con-tributions from every hinge (indexed by i). Using the identity2sin2 u = 1cos2u, with u = ()/2, we arrive at an ex-pression of energy associated to the ith hinge:
Eb(x)i =3|ei|
2
Ai(1 cos(i i)) . (4)
In the following section, we prove that for isometric defor-mations this hinge energy is cubic in x.
3. The cubic hinge
Our derivation uses the geometric construction in Figure 1,which defines local indices of the triangles, {T0, T1}, edgevectors, {e0, . . . , e4}, and vertex positions, {x0, . . . , x3}, as-sociated to a hinge. Note the construction of perpendicu-lars ti: each edge vector ei is rotated 90 degrees, on the
For planar rest state ( = 0) we have lim0 2sin/2 =lim0 2tan/2 = , so that models that use 2 sin/2, 2tan/2,or coincide in the limit of an appropriate refinement sequence.
cAssociation for Computing Machinery, Inc. 2007.
-
8/6/2019 Cubic Shells
3/8
Garg, Grinspun, Wardetzky, and Zorin / Cubic Shells
plane of the triangle, to point outwards (thus |ti| = |ei| andti, ei = 0). Since e0 is associated to two triangles, we con-
struct two perpendiculars, t(0)0 and t
(1)0 , on the planes of tri-
angles T0 and T1 respectively.
Expressing the perpendiculars t(0)0 (resp. t
(1)0 ) in the edge
basis {e1, e3} (resp. {e2, e4}) we obtain
t(0)0 = cot03e1 cot01e3 , (5)
t(1)0 = cot04e2 cot02e4 . (6)
Under isometric deformation, interior angles remain con-
stant, therefore t(0)0 and t
(1)0 are linear expressions in the
position of the mesh. Furthermore, the geometry of Fig. 1-bottom reveals that
cos =t
(0)0 , t
(1)0
|e0|2, and sin =
[e0, e1, e2]
|e0|2,
where [ei, ej, ek] is the scalar triple product (ei ej) ek, and
=1
|e0| (cot01 + cot03)(cot02 + cot04).
Expanding (4) by the identity cos( ) = coscos+sinsin, substituting the above expressions for cos andsin, and simplifying the resulting expression by using theisometry assumption (|ei| = |ei|) we find that (4) equals
3
A0
|e0|
2 + t(0)0 , t
(1)0 cos
thin plate component
+3
A0[e0, e1, e2] sin
cubic term
. (7)
Under isometry, the energy associated to an individual hingeis a cubic polynomial in x. Just as in the smooth picture,the discrete Eb(x) is cubic. Note that for the special case = 0, we recover the quadratic bending thin plate energyof [BWH06] simply by substituting (5) and (6) into (7).
4. Orthotropy
We now generalize our bending model to orthotropicmaterialsan important class of anisotropic materialswhose elastic properties depend on the direction along whichthey are measured [VK01]. A fully general linear elastic-ity model for deformable surfaces has six parameters (notcounting the choice of anisotropy axes) some of which arehard to interpret intuitively. We focus on a more restricted or-thotropic elasticity model whose four parameters have moreintuitive meaning and appear to be useful for material be-havior control in animation. Most common man-made ma-
terials are orthotropic, for example, cloth, plastic reinforced
The expression for sin was derived from
sin =t
(0)0 , n
(1)
|e0|2=
[t(0)0 , t
(1)0 , e0]
|e0|3=
[e0, e1, e2]
|e0|2,
where n(1) = (|e0|/|e4 e2|)e4 e2 is a scaled triangle normal. The
last step is obtained by using (5) and (6) to replace t(0)0 and t
(1)0 ,
followed by observing that e4 = e2 e0 and e3 = e1 e0 .
by fibers, sheet metal, and paper. Non-orthotropic thin ma-terials are less common (e.g., thin sheets obtained by cuttinga 3D orthotropic material at an angle, or composite materi-als). For cloth, orthotropic approximation naturally matchesmost of the parameters of the Kawabata cloth evaluation sys-tem [Kaw80], a commonly used system for characterizingcloth properties, as explained below.
We are primarily interested in how these material parame-ters affect bending, rather than in-plane deformations. Fromthe four parameters of orthotropic materials, one parame-ter can be eliminated if we assume that bending the surfacealong material directions does not have any effect on bend-ing on the other direction (this corresponds to having zeroPoisson ratio in the isotropic case). For simplicity we willassume that this is the case, and briefly discuss the role ofthe Poisson ratio at the end of this section.
The most obvious of the remaining three parameters aretwo Youngs moduli, Y0 and Y1, which determine bendingstiffness along two material directions. The third parameteris the shear modulus, G01, which, for in-plane deformations,determines the resistance to shear. In the case of bending, theshear modulus allows for additional directional variability ofbending stiffness. Specifically, bending stiffness at an angle with respect to the material axis 0, is given by (up to ascale factor):
Y0 cos4+Y1 sin4+ 2G01 sin2cos2 . (8)
90
270
180 0
G01=K
G01=.01K
G01=2KConsider the adjacent
plot of directionalstiffness as a func-tion of , for threematerials all sharing
Y0
= Y1
, but withshear moduli 0.1K,K, and 2K. Notethat for low shear,typical for cloth, themaximal to minimalbending stiffnessratio is 2. As shownin Figure 4, this has a significant effect on drapability,and cannot be achieved by a simple model using just twoparameters. Similarly, the shear modulus affects resistanceof cloth to twisting, even ifY0 = Y1, as twisting may lead todiagonal bending.
Directional stiffness is particularly important in the caseof quasi-inextensible flat sheets. Such sheets have smallGaussian curvature (the product of the two principal curva-tures), which implies that strong bending can be present onlyin a single direction.
In contrast to directional stiffness, forces arising from theinteraction of multiple bending directions (e.g., due to thePoisson ratio in the isotropic case) appear to be qualitativelyless important. In fact, one can show that for directional stiff-ness this interaction results in effective increase in the shear
c Association for Computing Machinery, Inc. 2007.
-
8/6/2019 Cubic Shells
4/8
Garg, Grinspun, Wardetzky, and Zorin / Cubic Shells
modulus. One can prove that in the simple case of bendingof a plate with fixed boundaries the bending forces (unlikestretching) are independent of the Poisson ratio.
The Kawabata system characterizes cloth by its resistanceto bending along warp and along weft directions, and by
tensile, shearing and compressive stiffnesses measured asfunctions of deformation. In the orthotropic elasticity model,stiffnesses are assumed to be independent of the deforma-tion, which appears to be a good approximation for quali-tative modeling. Furthermore, plasticity effects are ignored,and the compressive and tensile stiffnesses are assumed to beequal. As pointed out in [BD94], linear elasticity provides agood approximation for Kawabata measurements for smalldeformations, although it ignores some of the subtler initial-resistance effects.
Given Kawabata measurements of a fabric, Y1 and Y0 canbe inferred from directional bending stiffnesses and tensilemeasurements, and G01 from shear measurements. Alterna-tively, Y1, Y0, G01, and the material axes may be directlycontrolled by an artist, adjusting parameters based on thenotion that Y1 and Y0 determine resistance to bending alongthe two orthogonal material directions and G01 determinesthe resistance of the material to draping over an object.
Given the material parameters, and applying a standardformulation of Hookes law for orthotropic materials, we canexpress the bending energy density of a deformed surface asa function of bending strain , using one additional mate-rial parameter Y01 = 01Y
1 = 10Y0, where 10 and 01 are
Poisson ratios (which always satisfy 01/Y0 =10/Y1). Theenergy density is
cY0200 + Y
1211 + 2Y010011+ 2hG
01201 , (9)
where c = hY0Y1/(Y0Y1 Y01Y01), h = 3/12, and isthe sheet thickness. The bending strain is the shape opera-tor [dC92] for surface, which for a quadratic bending energyreduces to the matrix of second partial derivatives. For thespecial case of isotropic materials, Y0 = Y1 = 2(1+)G01 =Y01/.
In the following section, we show that orthotropic effectscan be captured by weighting each hinge stiffness by a scalarfactor, i. For convenience of implementation, the results ofthis derivation are summarized in 5.1.
4.1. Derivation of hinge stencil orthotropy
In 2.2 we discussed a simple model of discrete bending en-ergy for isotropic shells. We based this model on summingthe contributions of squared mean curvatures over interioredges. While discrete mean curvatures suffice to cover theisotropic case, we must use a discretization of the full shapeoperator in the anisotropic case. Indeed, smooth anisotropicenergy density (9) requires expressing the discrete shape op-erator as a symmetric 22 matrix in the material frameasthe entries of this matrix measure bending and shearing stiff-ness in principal material directions. A hinge-based discrete
shape operator S has been successfully applied in geometricmodeling [HP04]. Here we augment the geometric modelingview by two aspects: (a) we express S in a material frame asopposed to its original expression in a principal curvatureframe, and (b) we show how S leads to a scalar stiffness-correcting factor per edge covering the discrete orthotropiccase.
Let us briefly recall the geometric view based on discreteprincipal curvatures taken in [HP04]. It is well-known fromthe smooth case [dC92] that S corresponds to a quadraticform whose (orthogonal) eigenvectors correspond to thetwo principal curvature directions, and its eigenvalues corre-spond to the principal curvatures, 0 and 1. Recall also thatmean curvature is given as H= 0 +1. In the discrete edge-based view, [HP04] defines the two principal curvature di-rections as (1) the direction along the edge and (2) the direc-tion perpendicular to the edgewith no curvature (0 = 0)along the edge and normal curvature (1 = ) perpendicu-lar to the edge. Consequently, H = , and in the edge-basedprincipal curvature frame, the discrete shape operator takesthe form
S =
0 00
= H
0 00 1
.
We note that this hinge-based shape operator is mesh depen-dent (in particular, principal directions are tied to edge direc-tions). However, if the edge directions are distributed evenly,on the average the true shape operator is well approximated.
In order to express S in the material frame, we treat themesh area associated with each hinge stencil as a homoge-neous piece of material, i.e., we assume that the material
parameters cY0
, cY1
, cY01
, hG01
, and the material axes areconstant over hinge stencils. Denoting by 0 the angle be-tween edge ei and the first material axis, ya, and using thefact that the shape operator transforms like a quadratic form,we obtain that S takes the form
Si = Hi
sin2 0 sin0 cos0
sin0 cos0 cos2 0
,
when expressed in the material frame of the edge i. Finally,using the smooth energy density (9) and setting = S, itfollows from basic trigonometric identities that the discreteorthotropic density can be written as
(cY0) sin4 0 + (cY1) cos4 0 + 12 cY01 + hG01sin2(20) i
H2i ,
providing a way to adjust hinge weights to effect orthotropicresponse.
This completes the requisite derivations for orthotropiccubic shells. In the following, we discuss the implementa-tion of our model (56) and demonstrate the generality ofthe model with various simulation examples (7).
cAssociation for Computing Machinery, Inc. 2007.
-
8/6/2019 Cubic Shells
5/8
Garg, Grinspun, Wardetzky, and Zorin / Cubic Shells
5. Implementing cubic shells
In this section we describe the computation of forces andforce Jacobians for the cubic shells energy, (7). Consider amesh with n vertices and coordinate vectors xx, xy, xz Rn.Hinge-centric computations are expressed in terms of the
hinges local indices (Fig. 1) for triangles, {T0, T1}, edgevectors, {e0, . . . , e4}, and vertex positions, {x0, . . . , x3}.
Precomputation. Recall that quantities that depend only onthe undeformed positions are decorated with a bar, e.g., x.Compute barred quantities once, before the simulation.
One-time matrix assembly. Assemble the global nn ma-trix, Q, by iterating over hinge stencils. In the usual style ofstiffness matrix assembly [ZT89], Q accumulates contribu-tions from each local 44 matrix, Qi:
Qi =
3i cosi
Ai
K
Ti Ki ,
where i is the stiffness of the hinge, Ai is the combined areaof the two hinge triangles, and i is the undeformed hinge
angle. In local indices, cos = t(0)0 , t
(1)0 /|e0|
2, and K =
(c03 + c04, c01 + c02,c01 c03,c02 c04) R4, where
cjk = cotej, ek.
Force computation. Compute forces by adding thin plateand nonflat contributions. Compute thin plate contributionsglobally as the matrix-vector products fx = Qxx, fy = Qxy,fz = Qxz. Compute nonflat contributions by accumulatinglocal hinge contributions
f0 = f1 f2 f3 , f1 = k(e1 e2) ,
f2 = k(e2 e0) , f3 = k(e0 e1) ,where k= 3i(c01 c03)(c04 c02)[e0, e1, e2]/(A0|e0|
3).
Force Jacobian computation. The exact force Jacobian(R3n R3n) is obtained by adding the thin plate and thenonflat contributions. The thin plate contributions are givenby fx/xx = fy/xy = fz/xz = Q. For best performance(without sacrifice of accuracy), the nonflat contribution isomitted (as explained in 6); for completeness of expositionthe nonflat contribution is detailed in the Appendix A.
5.1. Orthotropic hinge
The simple expressions above are all that is required to im-plement a cubic hinge-based bending force, given a stiffnessvalue i per hinge. For homogeneous isotropic materials,i = does not vary over the mesh, and the above derivationsuffices; if a general class of orthotropic materials is desired,then i should be computed by the formula derived in (4.1);recall i =
(cY0) sin4 0 + (cY1) cos4 0 +
1
2
cY
01 + hG01
sin2(20) ,
where 0 is the angle between the hinge edge and the firstmaterial axis, y0, and Y
0,Y1,Y01, and G01 are the material
parameters described above. The above expression is all thatis needed to implement orthotropic bending for cubic shells,and indeed for any existing hinge-based model.
In our implementation, the (spatially-varying) direction ofy0 is encoded by a coordinate function over a given parame-
terization of the surface. In particular, we use the color val-ues of a texture map to encode the direction of the materialaxis.
6. Efficient simulation of thin shells
The separability of the force Jacobian of cubic shells intoa constant and linear term opens several interesting possi-bilities for efficient time integration of thin shell dynamics.Among common discrete time-stepping schemes [Hau04,HLW06, BW98], implicit schemes are popular in anima-tion due to their stability. Implicit schemes advance timeby solving a (typically nonlinear) system of equations. Thesystem is usually solved by repeated Newton iterations (al-though semi-implicit methods complete a single Newton it-
eration) [PTVF92]. Each Newton iteration requires an eval-uation of the force, E, as well as the force Jacobian.
The fixed points of Newtons method remain unalteredwhen the nonlinear system Jacobian is replaced by any in-vertible matrix. An inexact Newtons method [Mor99] usesthis fact in replacing a costly Jacobian with an inexpensiveapproximant. Hauth [Hau04] used an approximation of thein-plane stretching force Jacobian, and an inexact Newtonframework, to accelerate cloth simulations; our work is sim-ilar, but we approximate the bending Jacobian. Wardetzky etal. [WBH] also used an inexact Newton solve, in a meshsmoothing application; in contrast to that application, wetreat the dynamics of shells having nonflat undeformed con-
figurations.
Experiment. We consider the application of the inexactNewtons method with approximations to the bending forceJacobian. To provide a standard and easily-reproduciblepoint of reference, we consider the Euler method, fully-implicit on stretching and bending elastic forces, without anyadditional damping forces.
In our experiments we pair two possible bending forceswith three possible force Jacobians. For the two forces weconsider the nonlinear hinge (NH)the force resulting fromtreating bending energy fully nonlinearly (i.e., by droppingthe isometry assumption)and the cubic shells force (CS)arising from our cubic energy as discussed in the previoussection. For the three force Jacobians we consider the non-linear hinge Jacobian (NH), the entire cubic shells Jacobian(CS), and the constant part (CC) of the cubic shells Jaco-bian. A particular choice of (inexact) Newton is denoted bya 2-tuple, e.g., (CS,CC) denotes the use of the cubic shellbending forces paired with an approximate constant Jaco-bian; (NH,NH) denotes the usual fully-implicit implementa-tion of the nonlinear hinge.
As a baseline, we run (NH,NH) at the maximum stable step
c Association for Computing Machinery, Inc. 2007.
-
8/6/2019 Cubic Shells
6/8
Garg, Grinspun, Wardetzky, and Zorin / Cubic Shells
Mesh Resolution
5
e-04
4e-03
3e-02
2e-01
10x10 20x20 40x40 80x80
SimulatedTime/CPU
Sec
dt
8e
-03
3e-02
1e-01
5e-01
1e-03 4e-03 2e-02
(NH, NH)(NH, CS)
(NH, CC)(CS, CS)
(CS, CC)
}2.4x
dt
3e-08
5e-07
2e-05
3e-05 1e-04 5e-04
}2.3x
dt
2e-03
4e-03
8e-03
2e-02
1e-04 5e-04 2e-03
}2.5x
160x160}2.5x
Orthotropic Flags Falling Cylinders Falling Bowl Mesh Resolution
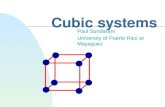
Figure 2: (Left:) Performance measured in completed simulation time per CPU second (y-axes) as a function of discrete timestep (x-axes). Higher values mean better performance. In an inexact Newton framework, Cubic Shells dominate performance
for all tested scenarios, including (left-to-right) Orthotropic Flags (Fig. 5), Falling Cylinders (Fig. 3), and Falling Bowl (Fig. 7).
Right: Performance as a function of mesh resolution (from 1010 to 160160 regular grids), demonstrating that the benefitsof cubic shells are not resolution-dependent. Timing numbers include timestepping and collision detection/response.
size, and four smaller step sizes; these step sizes are reusedin runs of (NH, CS), ( NH, CC), ( CS, CS), (CS, CC). We mea-sure performance of these runs for various problem scenarios(see 7 and video).
We record the performance of each method, measured asthe ratio completed simulation time per CPU second, i.e.,higher values mean better performance (see Figure 2left).The cubic shells with an approximate constant Jacobian,(CS,CC), dominates all methods for all problem scenarios.Note that the performance gains observed for ( CS, CC) areindependent of mesh resolution (see Figure 2right).
7. Visual impact of orthotropic parameters
Orthotropic parameters provide additional artistic controlover the dynamics of wrinkles and folds. Consider for ex-ample a flag tailored by cutting a rectangular pattern froman orthotropic textile. The orientation of warp and weft rela-tive to the flags pattern, as well as the values of Youngs and
shear moduli, have considerable visual impact on the result-ing dynamics (see Fig. 5 and accompanying video).
The orthotropic shear modulus plays an important rolein the drapability of a fabric [SM02]; the shear modulusis not captured by geometric models that employ Eulersformula, such as [BW98, VMT06], or elliptic interpolation,such as [CK03]. A high shear modulus tends to align foldsand wrinkles to the material axes; a lower shear modulus al-lows the fabric to fold along other directions, and therefore toobtain a closer fit to the body. The first two frames of Fig. 4compare a high and low shear modulus, respectively, illus-trating the intuitive notion of drapability. When a high shearmodulus is desired (leftmost frame), the Youngs modulus isa poor substituteit is unable to capture stiff extrusion ofthe poncho around the shoulders without introducing extra-neous stiffness elsewhere.
Furthermore, orthotropy has a strong effect on the interac-tion between a material and its environment. We simulate thefall and bounce of four elastic cylinders, each with a differ-ent orientation for its principal material axis. The resultinganimation (Fig. 3 and accompanying video) reveals the ex-treme variations in deformation and overall trajectory thatarise purely from changing the orthotropic parameters.
Orthotropy indirectly enriches any other technologies im-plemented in the simulator, such as viscoelasticity or frac-ture [TF88]. For example, the anisotropic bending resultingfrom collisions produces distinctive fracture patterns bothfor plates (Fig. 6) and shells (Fig. 7). For a summary of thefracture algorithm refer to Appendix B.
8. Discussion
Limitations. The cubic hinge does not overcome thoselimitations that are shared by all hinge-based approaches.In particular, the simplicity of hinge-based models comesat the cost of limited convergence behavior and meshing-dependence [GGRZ06].
Implicit to the cubic hinge is the assumption that the sur-face deforms isometrically, i.e., without stretching. A natu-ral question, then, is how much stretching is permissible inpractice, and what are the failure modes of the model un-
der excessive stretching? To explore these questions, we re-simulate the falling cylinder and falling bowl using progres-sively lower stretching resistance. Both examples remainwell-behaved so long as the stretching stiffness is two or-ders of magnitude greater than the bending stiffness; duringthe simulation, the meshes stretch by as much as 15%.
If we reduce stretching stiffness even further, then for thethin shell examples we observe a slow, noticeable stretchingof the surface, in particular, in an expanding (not oscillatory)mode. This is perhaps not surprising, since a cubic energyis not bounded from below; under normal (quasi-isometric)circumstances, the stretching resistance prevents this infinitewell from being exploited.
We repeat the above experiment with the billowing flag.Since the flag has a flat undeformed configuration, the cubicenergy term vanishes, leaving a quadratic energy boundedfrom below. We observe that the flag simulation is well-behaved even when strong wind induces stretching of 300%.
Conserved momenta. In all circumstances (even when par-asitic stretching is observed due to a broken isometry as-sumption), the simulated model conserves linear and angularmomenta. To see this, note that the quadratic forces arising
c Association for Computing Machinery, Inc. 2007.
-
8/6/2019 Cubic Shells
7/8
Garg, Grinspun, Wardetzky, and Zorin / Cubic Shells
from the cubic energy are notapproximated (only their Jaco-bian is); since the cubic energy is invariant under rigid bodytransformations of the deformed (and also the undeformed)configuration, forces induced by this energy do not apply aglobal acceleration or torque.
Due to its simplicity, efficiency, and generality, we expectcubic shells to be of practical relevance in computer anima-tion.
Acknowledgments We thank David Harmon for providing ro-bust collision detection and response code. We thank David Eberleand the anonymous reviewers for their feedback. This work wassupported in part by the DFG Research Center MATHEON inBerlin, the NSF (MSPA-IIS-05-28402, CSR-CNS-06-14770, CCR-0093390, CAREER-CCF-06-43268), Autodesk, Elsevier, mentalimages, NVIDIA, and an IBM Faculty Parternship award.
References
[BD94] BREEN D., DONALD H.: House, and Michael J. Wozny.Predicting the drape of woven cloth using interacting particles.Proceedings of SIGGRAPH 94 (1994), 365372.
[BMF03] BRIDSON R., MARINO S., FEDKIW R.: Simulation ofclothing with folds and wrinkles. SCA (2003), 2836.
[BW98] BARAFF D., WITKIN A.: Large steps in cloth simula-tion. In SIGGRAPH (1998), ACM Press, pp. 4354.
[BWH06] BERGOU M ., WARDETZKY M ., HARMON D.,ZORIN D., GRINSPUN E.: A quadratic bending model for in-extensible surfaces. In SGP (2006), pp. 227230.
[CK03] CHO I K.-J., KO H.- S.: Extending the immediate buck-ling model to triangular meshes for simulating complex clothes.In Eurographics 2003 Short Presentations (2003), pp. 187191.
[dC92] DO CARMO M.: Riemannian Geometry. Mathematics:Theory and Applications. Birkhuser, 1992.
[GGRZ06] GRINSPUN E., GINGOLD Y., REISMAN J., ZORIND.: Computing discrete shape operators on general meshes.Comput. Graph. Forum 25, 3 (2006).
[GHDS03] GRINSPUN E ., HIRANI A. N., DESBRUN M.,SCHRDER P.: Discrete shells. SCA (2003), 6267.
[GSH04] GINGOLD Y., SECORD A., HAN J. Y., GRINSPUN E.,ZORIN D.: A Discrete Model for Inelastic Deformation of ThinShells. Tech. rep., Aug 2004.
[Hau04] HAUTH M.: Visual Simulation of Deformable Models.PhD thesis, University of Tbingen, 2004.
[HLW06] HAIRER E., LUBICH C., WANNER G.: Geometric Nu-merical Integration: Structure-Preserving Algorithms for Ordi-
nary Differential Equations. Springer, 2006.
[HP04] HILDEBRANDT K., POLTHIER K.: Anisotropic filtering
of non-linear surface features. CGF 23, 3 (2004), 391400.[Kaw80] KAWABATA S.: The Standardization and Analysis of Hand Evaluation. The Hand Evaluation and StandardizationCommittee, The Textile Machinery Society of Japan, 1980.
[MBF04] MOLINO N., BAO Z., FEDKIW R.: A virtual node al-gorithm for changing mesh topology during simulation. In SIG-GRAPH (2004), pp. 385392.
[Mor99] MORINI B.: Convergence behaviour of inexact newtonmethods. Math. of Comp. 68, 228 (1999), 16051613.
[OH99] OBRIEN J. F., HODGINS J. K.: Graphical modeling andanimation of brittle fracture. In SIGGRAPH (1999), pp. 137146.
[PTVF92] PRESS W. H., TEUKOLSKY S. A. , VETTERLINGW. T., FLANNERY B. P.: Numerical Recipes in C: The Art ofScientific Computing. Cam. Univ. Press, 1992.
[SM02] SIDABRAITE V., MASTEIKAITE V.: A preliminary studyfor evaluation of skirt asymmetric drape. International Journalof Clothing Science and Technology 14, 5 (2002), 286298.
[TF88] TERZOPOULOS D., FLEISCHER K.: Modeling inelasticdeformation: Viscoelasticity, plasticity, fracture. In SIGGRAPH(1988), pp. 269278.
[TW06] THOMASZEWSKI B., WACKER M.: Bending Models forThin Flexible Objects. In WSCG Short Comm. (2006).
[VK01] VENTSEL E., KRAUTHAMMER T.: Thin Plates andShells. CRC Press, 2001.
[VMT06] VOLINO P., MAGNENAT-T HALMANN N.: Simple lin-ear bending stiffness in particle systems. In SCA (2006), pp. 101106.
[WBH] WARDETZKY M., BERGOU M., HARMON D., ZORIND., GRINSPUN E.: Discrete Quadratic Curvature Energies. Toappear in CAGD, 2007.
[ZT89] ZIENKIEWICZ O. C., TAYLOR R. L.: The finite elementmethod. McGraw Hill, 1989.
Appendix A: Neglected term in force Jacobian As discussedin 6, we advocate the use of an inexact Newtons method, using only the constant portionofthe forceJacobiangivenin 5. Indeed, for optimal performance(and no lossof accuracy)one should omit calculation of the linear component arising from the nonflat undeformedconfiguration. However, for completeness of presentation, we include the expression forthis linear component below.
With respect to the local position vector (x0 , x1 , x2 , x3) R12 , and the corresponding
local force vector f= (f0, f1 , f2 , f3) R12 , the local force Jacobian (R12R12) is given
by
k
0 (e1 e2) (e2 e0)
(e0 e1)
(e1 e2) 0 e2 e
1
(e2 e0) e2 0 e
0
(e0 e1) e1 e
0 0
,
where each entry represents a 3 3 skew-symmetric subblock; the asterisk applied to avector, v , produces the matrix
v
= 0 vz vy
vz 0 vxvy vx 0 ,
corresponding to the cross product operation v(). Thelocal force Jacobian is assembled
into the global R3nR3n Jacobian in the usual manner. While it is most easily expressedby a skew-symmetric matrix of skew-symmetric subblocks, note that Hess G(e0) is indeedsymmetric.
Appendix B: Implementing fracture The material fractures when in-ternal strain exceeds a threshold. For simplicity we only consider fracture along existingmesh edges; however, this limitation can be easily removed, see e.g., [OH99, MBF04,
GSH04]. A hinge edge, ei , fractures if the bending strain,|ei|
Ai(i i ), exceeds a
material-dependent threshold.
Fracture may be viewed as the transition when an interior edge becomes aboundary edge. A mesh edge has one of three states: INTERIORFRACTURED-INTERIORBOUNDARY, where the arrows indicate allowable state transitions. An IN-TERIOR edge becomes FRACTURED-INTERIOR if the strain threshold is exceeded; aFRACTURED-INTERIOR edge becomes BOUNDARY only as a consequence of explicitchanges to mesh connectivity, as explained below.
A BOUNDARY vertex is a vertex incident on a FRACTURED-INTERIOR or BOUNDARYedge. A FRACTURED-INTERIOR edge, ei , may be in one of three configurations, distin-guished by the number of incident BOUNDARY vertices:
ei ei ei
B0 B1 B2
In each case, any BOUNDARY vertices incident on ei are split into two. Specifically, incase: (B0), no action is taken; (B1) and (B2), one and two vertices are split, respectively,and the resulting change to mesh connectivity causes at least one edge (ei ) but possiblyother incident edges to transition FRACTURED-INTERIORBOUNDARY.
c Association for Computing Machinery, Inc. 2007.
-
8/6/2019 Cubic Shells
8/8
Garg, Grinspun, Wardetzky, and Zorin / Cubic Shells
Figure 3: Thin-shell simulation of falling orthotropic cylinders. Material axes vary from left-to-right: isotropic, vertical, hor-
izontal, diagonal. Left Image: stress formed on the cylinders upon impact. Right Image: the effects of anisotropy after impact.
Note the extreme flatenning of the cylinder with axis aligned vertically and the high bounce of the cylinder with axis aligned
horizontally.
Y0 = Y1 = 0.01, G01 = 100 Y0 = Y1 = 0.01, G01 = 0 Y = 0.2 Y = 0.35 Y = 0.5
Figure 4: Shear vs. no bending shear: a high bending shear modulus tends to align folds and wrinkles to the material axes
(leftmost); a lower shear modulus allows the fabric to fold along other directions, and therefore to obtain a closer fit to the
body (second frame). Shearing effects cannot be reproduced by simply tuning Young moduli (3 unsuccessful attempts shown on
the right).
Figure 5: Varying material axes at no additional cost. From left-to-right: isotropic, vertical, horizontal and diagonal.
Figure 6: Thin plates: adjustable directions of fracture patterns. Left-to-right: isotropic, vertical, horizontal and diagonal.
Figure 7: Thin shells: adjustable directions of fracture patterns. Left-to-right: isotropic, vertical, horizontal and diagonal.
cAssociation for Computing Machinery, Inc. 2007.