
CTU - Centre national de la recherche scientifiquejrbelliard.perso.math.cnrs.fr/cours-ctu.pdfCTU...
92
C T U Besançon Master Mathématiques Unité d’Enseignement ✭✭ MODULES SUR LES ANNEAUX PRINCIPAUX ✮✮ Responsable : J.-R. Belliard. Centre de Télé-enseignement Universitaire. Besançon. [email protected] 1 MMVI 1 Toute correspondance relative à l’unité ✭✭ MODULES ✮✮ (envoi de devoirs, demande de renseignements sur le cours. . . ) est à adresser à : Université de Franche-Comté. Télé-enseignement mathématique. Jean-Robert Belliard. 25030 BESANÇON CEDEX
Transcript of CTU - Centre national de la recherche scientifiquejrbelliard.perso.math.cnrs.fr/cours-ctu.pdfCTU...
CTUBesançon
MasterMathématiques
Unité d’Enseignement(( MODULES SUR LES
ANNEAUX PRINCIPAUX ))
Responsable : J.-R. Belliard.Centre de Télé-enseignement Universitaire.
Besanç[email protected]
MMVI
1Toute correspondance relative à l’unité (( MODULES )) (envoi de devoirs, demande derenseignements sur le cours. . . ) est à adresser à :
Université de Franche-Comté.Télé-enseignement mathématique.
Jean-Robert Belliard.25030 BESANÇON CEDEX

Cette brochure a été réalisée en LATEX2ε.
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon
ATable des matières.
Table des matières.
0 Groupes et Anneaux :Rappel de définitions. 10.1 Objets, sous-objets, morphismes. . . . . . . . . . . . . . . . . . . . . . . . 10.2 Noyaux, images, quotients . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1 Modules sur un anneau commutatif : Généralités. 111.1 Modules, sous-modules, applications linéaires. . . . . . . . . . . . . . . . . 111.2 Noyaux, images, produits directs, sommes directes et quotients . . . . . . . 151.3 Systèmes libres, générateurs, bases, rang. . . . . . . . . . . . . . . . . . . . 211.4 Suites exactes, torsion. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2 Classification des modules de type fini sur les anneaux principaux 272.1 Présentation matricielle des modules de type fini . . . . . . . . . . . . . . . 272.2 le théorème de la base adaptée : énoncé de résultats . . . . . . . . . . . . . 282.3 Opérations élémentaires sur les matrices . . . . . . . . . . . . . . . . . . . 322.4 Équivalences de matrices : l’algorithme de Smith . . . . . . . . . . . . . . . 352.5 Démonstration du lemme 2.3 pour les anneaux principaux . . . . . . . . . 37
3 Exercices du chapitre 0. 413.2 Exercice 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 413.3 Exercice 2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 413.4 Exercice 3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 413.5 Exercice 4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 413.6 Exercice 5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 413.7 Exercice 6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 413.8 Exercice 7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 423.9 Exercice 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 423.10 Exercice 9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 423.11 Exercice 10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4 Exercices du chapitre 1. 434.2 Exercice 11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 434.3 Exercice 12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 434.4 Exercice 13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 434.5 Exercice 14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 434.6 Exercice 15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 434.7 Exercice 16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon
B Table des matières.
4.8 Exercice 17. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 444.9 Exercice 18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 444.10 Exercice 19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 444.11 Exercice 20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 444.12 Exercice 21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 444.13 Exercice 22. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 444.14 Exercice 23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 454.15 Exercice 24. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 454.16 Exercice 25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
5 Exercices du chapitre 2. 475.2 Exercice 26. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 475.3 Exercice 27. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 475.4 Exercice 28. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 475.5 Exercice 29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 475.6 Exercice 30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 485.7 Exercice 31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
6 Corrigé des exercices du chapitre 0 516.1 Exercice 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 516.2 Exercice 2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 516.3 Exercice 3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 526.4 Exercice 4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 526.5 Exercice 5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 526.6 Exercice 6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 526.7 Exercice 7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 536.8 Exercice 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 536.9 Exercice 9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 536.10 Exercice 10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
7 Corrigé des exercices du chapitre 1 577.11 Exercice 11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 577.12 Exercice 12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 577.13 Exercice 13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 597.14 Exercice 14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 597.15 Exercice 15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 607.16 Exercice 16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 607.17 Exercice 17. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 607.18 Exercice 18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 617.19 Exercice 19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 617.20 Exercice 20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 617.21 Exercice 21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 617.22 Exercice 22. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 617.23 Exercice 23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 627.24 Exercice 24. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 627.25 Exercice 25. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon

CTable des matières.
8 Corrigé des exercices du chapitre 2 658.26 Exercice 26. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 658.27 Exercice 27. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 658.28 Exercice 28. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 678.29 Exercice 29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 678.30 Exercice 30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 688.31 Exercice 31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
9 Annales. 719.1 premier devoir 04/05. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 719.2 solution du premier devoir 04/05. . . . . . . . . . . . . . . . . . . . . . . . 729.3 deuxième devoir 04/05. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 739.4 solution du deuxième devoir 04/05. . . . . . . . . . . . . . . . . . . . . . . 749.5 Épreuve principale première session 2005. . . . . . . . . . . . . . . . . . . . 779.6 Solution de l’épreuve principale première session 2005. . . . . . . . . . . . . 789.7 Épreuve complémentaire première session 2005. . . . . . . . . . . . . . . . 809.8 Solution de l’épreuve complémentaire première session 2005. . . . . . . . . 819.9 Épreuve principale deuxième session 2005. . . . . . . . . . . . . . . . . . . 829.10 Solution de l’épreuve principale deuxième session 2005. . . . . . . . . . . . 839.11 Épreuve complémentaire deuxième session 2005. . . . . . . . . . . . . . . . 849.12 Solution de l’épreuve complémentaire deuxième session 2005. . . . . . . . . 85
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon

D Table des matières.
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon
1Chapitre 0.
Chapitre 0
Groupes et Anneaux :Rappel de définitions.
0.1 Objets, sous-objets, morphismes.
Définition 0.1 : Structure de groupe additif1. Un groupe commutatif (additif) est un ensemble G muni d’une loi de composition
interne + vérifiant les axiomes :(a) (existence d’un neutre additif) Il existe 0G ∈ G tel que pour tout g ∈ G on ait
0G + g = g + 0G = g
(b) (existence d’un symétrique additif) Pour tout g ∈ G il existe (−g) ∈ G tel queg + (−g) = (−g) + g = 0G
(c) (associativité additive) Pour tout a, b, c ∈ G on a (a + b) + c = a + (b + c).(d) (commutativité additive) Pour tout a, b ∈ G on a a + b = b + a
2. Soit A et B deux groupes (additifs). On appelle morphisme de groupe de A dans Bune application f : A −→ B compatible avec les structures des groupes c’est-à-diretelle que :(a) Pour tout x, y ∈ A on ait f(x + y) = f(x) + f(y).
3. Soit G un groupe (additif). On appelle sous-groupe de G tout sous-ensemble H deG vérifiant les axiomes(a) H 6= Ø(b) Pour tout a, b ∈ H on a a + (−b) ∈ H.
Dans le point 1. ci-dessus, si on se contente des trois premiers axiomes (a), (b) et (c)vous reconnaissez la définition d’un groupe. On parle de groupe commutatif (ou abélienen hommage au mathématicien Abel) lorsqu’en outre le quatrième axiome est vérifié. Onn’étudie ici que les groupes commutatifs et on convient de la notation additive en vue dedéfinir la notion d’anneau.La conjonction des axiomes (a) et (b) du point 3. est équivalente à celle de l’axiome (b)et de l’axiome (a′) : 0G ∈ H. En pratique pour montrer qu’un sous-ensemble H estun sous-groupe il est souvent plus commode de vérifier (a′). Si H est un sous-ensemblequelconque de G la restriction de +: G×G −→ G à H ×H ⊂ G×G arrive dans G. Si H
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon

2 Groupes et Anneaux : Rappel de définitions.
vérifie les axiomes de la définition de sous-groupes alors cette restriction définit une loi decomposition interne sur H. Muni de cette loi H est un groupe et l’inclusion H ⊂ G est unmorphisme, ce qui justifie l’emploi du terme (( sous-groupe )).Définition 0.2 AnneauUn anneau A est un groupe additif muni d’une seconde loi de composition interne(multiplication) × vérifiant les axiomes :
1. (existence d’un neutre multiplicatif) Il existe 1A ∈ A tel que pour tout a ∈ A on ait1A × a = a× 1A = a.
2. (associativité multiplicative) Pour tout a, b, c ∈ A on a a× (b× c) = (a× b)× c.3. (distributivité à gauche et à droite de la multiplication par rapport à l’addition) Pour
tout a, b, c ∈ A on a (a + b)× c = (a× c) + (b× c) et a× (b + c) = (a× b) + (a× c).
Dans ce cours tous les anneaux vérifieront l’axiome 1 (ils auront un neutre multiplicatifappelé élément unité), ce qui correspond à la norme contemporaine, même si certainsouvrages précisent anneaux unitaires.Définition 0.3 Anneaux commutatifLorsque A est un anneau et que la multiplication est commutative, on dit que A est unanneau commutatif.
Si A est un anneau, l’ensemble A muni de la multiplication n’est pas un groupe, puisqu’onne suppose pas l’existence d’un inverse multiplicatif (une telle structure est parfois appeléemonoïde). De plus (si on exclut le cas trivial A = {0}) le neutre additif 0A n’est pasinversible multiplicativement. Lorsque tous les éléments non nuls de A sont inversible ondit que A est un corps.Définition 0.4Soit A et B deux anneaux. On appelle morphisme d’anneaux une application f : A −→ Bqui vérifie les axiomes suivants.
1. f est un morphisme de groupes : Pour tout x, y ∈ A f(x + y) = f(x) + f(y).2. f est compatible avec la multiplication : Pour tout x, y ∈ A f(x×y) = f(x)×f(y).3. f est un morphisme unitaire : f(1A) = 1B
Remarque Il suit de la définition de morphisme de groupes que f(0A) = f(0B). Maiscela utilise l’existence des inverses additifs et le point 3. n’est pas redondant. Soit A unanneau commutatif unitaire. Muni de l’addition et de la multiplication composante parcomposante l’anneau produit A×A est bien un anneau. Le morphisme de groupes additifa 7→ (a, 0) de A dans A× A vérifie les deux premières propriétés mais pas la dernière.
Exemples d’anneaux1. Les corps des nombres rationnels, réels ou complexes (notés respectivement Q,R etC).
2. L’anneaux des entiers rationnels noté Z.3. Lorsque A est un anneaux commutatif, l’anneau des polynômes à une indéterminée
à coefficients dans A, noté A[X] est un anneau.4. Lorsque (As)s∈S est une famille d’anneaux le produit cartésien
∏s∈S As muni des loi
de compositions internes composantes par composantes précisées ci-dessous est un
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon

3Chapitre 0. Objets, sous-objets, morphismes.
anneau.
(as)s∈S + (bs)s∈S = (as + bs)s∈S (as)s∈S × (bs)s∈S = (as × bs)s∈S
La structure d’anneaux est le cadre naturel pour généraliser les questions de divisibilité(autrement dit d’arithmétique) que chacun a rencontré dans Z. Au contraire dans un corpstous les éléments (non nuls) sont inversibles et se divisent les uns les autres : il n’y a plusde question d’ordre arithmétique. L’algèbre linéaire que vous connaissez suppose que lescoefficients appartiennent à un corps (en pratique les auteurs supposent même très souventle corps des coefficients égal à R ou C : une perte en généralité regrettable). L’algèbrelinéaire classique s’applique a de nombreux domaines des mathématiques, notamment lagéométrie ou la théorie des groupes à travers leurs représentations (linéaires). Mais pour laraison évoquée plus haut cette algèbre linéaire ne suffit pas aux applications arithmétiques.Si l’on remplace dans la définition d’espace vectoriel le corps des coefficients par un anneauon obtient une structure de module. L’objet de ce cours sera, tout en rappelant au passagedes notions d’algèbre linéaire connues, d’étudier cette structure nouvelle et de cerner lesdifficultés supplémentaires dues à ce gain en généralité.Dans une première partie du cours on énoncera des généralités à propos des modules sur unanneau commutatif quelconque. Puis on abordera la classification à isomorphismes près desmodules sur les anneaux principaux. Dans l’immédiat on va rappeler d’autres définitionsjusqu’à la notion d’anneau principal.Définition 0.5Soit A un anneau et I un sous-groupe additif de A. On dit que I est idéal bilatère de Alorsque I est multiplicativement absorbant à gauche et à droite c’est-à-dire lorsque
1. Pour tout a ∈ A et tout i ∈ I on a a× i ∈ I, et2. Pour tout a ∈ A et tout i ∈ I on a i× a ∈ I.
Remarque Lorsque seul le point 1. est vérifié, on dit que I est un idéal à gauche. Lorsqueseul le point 2. est vérifié on dit que I est un idéal à droite. Lorsque A est commutatif lestrois notions sont équivalentes (et on parle d’idéal sans préciser bilatère).
Exemple Soit A un anneau commutatif et a ∈ A. L’ensemble I = {x×a; x ∈ A} est unidéal (forcément bilatère) de A. On dit que I est l’idéal principal engendré par a. (En faitI est le plus petit idéal contenant a c’est donc bien l’idéal ayant pour partie génératrice lesingleton {a}).Définition 0.6Soit A un anneau commutatif et I ⊂ A un idéal de A.
1. On dit que I est principal lorsqu’il existe a ∈ A tel que I = {x× a; x ∈ A}.2. On dit que A est principal lorsque tous les idéaux de A sont principaux.
Proposition 0.1 (opérations sur les idéaux) Soient A un anneau et I et J deuxidéaux (à gauche si A n’est pas commutatif) de A.
1. I ∩ J est un idéal (à gauche) de A.2. L’ensemble noté IJ formé des sommes finies de produit ij où i ∈ I, j ∈ J est un
idéal (à gauche) de A. On l’appelle l’idéal produit de I par J .
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon

4 Groupes et Anneaux : Rappel de définitions.
Démonstration : C’est un cas particulier de la proposition 1.2 démontrée dans le chapitresuivant (vous verrez dans la suite que les sous-modules de A sont ces idéaux).Pour être complet on mentionne la notion de sous-anneau :Définition 0.7Soit A un anneau et B un sous-groupe (additif) de A. On dit que B est un sous-anneaude A lorsqu’il satisfait en outre aux axiomes :
1. 1A ∈ B
2. Pour tout x, y ∈ B on a x× y ∈ B.
Donc un sous-anneau de A est un sous-ensemble B contenant l’unité et stable pour lesdeux lois : ici aussi l’inclusion B ⊂ A est un morphisme d’anneaux, et cette propriétécaractérise les sous-anneaux de A.
0.2 Noyaux, images, quotients
Proposition 0.2Soit f : A −→ B un morphisme de groupes (additifs).
1. L’ensemble {b ∈ B; ∃a ∈ A tel que b = f(a)} est un sous-groupe de B.2. L’ensemble {a ∈ A; f(a) = 0B} est un sous-groupe de A.
Démonstration : Exercice.Définition 0.8Soit f : A −→ B un morphisme de groupes (additifs).
1. On appelle image de f et on note Im f le sous-groupe Im f = {b ∈ B; ∃a ∈ A. telque b = f(a)}.
2. On appelle noyau de f et on note ker f le sous-groupe ker f = {a ∈ A; tel quef(a) = 0B}.
Proposition 0.3Soit f : A −→ B un morphisme d’anneaux (en particulier de groupes additifs).
1. L’image Im f est en outre un sous-anneau de B.2. Le noyau ker f est en outre un idéal bilatère de A.
Démonstration : Exercice.Proposition 0.4Soit G un groupe additif. la donnée d’un sous-groupe H de G définit une relationd’équivalence sur G comme suit : Si g ∈ G et g′ ∈ G, alors g ∼H g′ si et seulement sig + (−g′) ∈ H.
Démonstration On traduit la définition de sous-groupe. H contient l’élément neutreentraîne que ∼H est reflexive. H contient l’inverse de tout ses éléments entraîne que ∼H
est symétrique. H est stable par + entraîne que ∼H est transitive. On détaille cette dernièreimplication et les deux autres sont proposées en exercice. Soit x, y, z, ∈ G tels que x ∼H yet y ∼H z. Alors on a x−y ∈ H et y−z ∈ H. Il suit x−y +y−z = x−z ∈ H, c’est-à-direx ∼H z.
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon
5Chapitre 0. Noyaux, images, quotients
Définition 0.9Soit G un groupe additif et H un sous-groupe de G. Soit ∼H la relation d’équivalencedéfinie par H.
1. Lorsque g ∼H g′ on dit que g et g′ sont dans la même classe d’équivalence moduloH.
2. Soit g ∈ G. On note g ou g + H ou πH(g) sa classe d’équivalence modulo H.Formellement il s’agit de g = {x ∈ G; x ∼H g}, c’est un sous-ensemble de G.
3. On note G/H l’ensemble des classes d’équivalence pour la relation ∼H . FormellementG/H est un sous-ensemble de l’ensemble des parties de G.
Pour être formellement correct, on est contraint pendant la définition qui précède deconsidérer les classes comme des sous-ensembles de G. A l’usage dès qu’on introduit lastructure de groupe on doit voir les classes comme les éléments du groupe quotient définipar le théorème qui suit.
Théorème 0.1Soit G un groupe additif et H un sous-groupe de G. Soit πH : G −→ G/H l’application(surjective) définie par la notation πH(g).
1. Il existe une unique loi de groupe (additive) sur G/H pour laquelle πH est unmorphisme de groupes.
2. ker πH = H
Démonstration. Pour le 1., l’unicité suit de la surjectivité de πH . Quant à l’existence,on doit seulement se convaincre que la loi de composition interne x + y := x + y est biendéfinie, autrement dit que la classe x + y ne dépend pas du choix de x dans x ni de celuide y dans y. Soit x′ ∈ x et soit y′ ∈ y. Alors il existe h1 ∈ H et h2 ∈ H tels quex′ = x + h1 et y′ = y + h2. On en déduit x′ + y′ = x + y + h1 + h2 ∈ x + y, puisqueH est un sous-groupe. D’où l’indépendance relative aux choix requise. Il reste à vérifierque cette loi de composition interne satisfait aux axiomes de la définition des groupes. Ils’agit d’un exercice de routine que je recommande aux lecteurs qui ne seraient pas encorefamiliers avec la notion de groupe quotient. Concrètement on utilise l’application πH pour(( transporter )) de G vers G/H la structure de groupe. Par exemple la classe 0G = πH(0G)est l’élément neutre de G/H. Vous trouverez la fin de la preuve (y compris le 2.) rédigéeavec les solutions des autres exercices.
Définition 0.101. On appelle groupe quotient de G par H l’ensemble G/H muni de l’unique structure
de groupe du théorème 0.1.2. On appelle surjection canonique le morphisme de groupes πH : G −→ G/H du
théorème 0.1.
Le quotient d’un groupe additif est sensiblement plus simple à définir que celui d’ungroupe non commutatif. En effet tous les sous-groupe étant normaux on peut considérerdirectement les groupes quotients sans s’attarder sur les ensembles de classes à gauche età droite.
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon

6 Groupes et Anneaux : Rappel de définitions.
Théorème 0.2Soit I un idéal bilatère d’un anneau A (en particulier I est un sous-groupe additif de A).Alors il existe sur le groupe quotient A/I une unique structure d’anneau pour laquelle lasurjection canonique πI est un morphisme d’anneaux.
Démonstration Là encore la seule difficulté est de montrer que la multiplication x×y :=x× y est bien définie. On procède de même que pendant la preuve du théorème 0.1. Soitx′ ∈ x et soit y′ ∈ y. Alors il existe i1 et i2 dans I tels que x′ = x + i1 et y′ = y + i2. Il suitx′ × y′ = (x + i1)× (y + i2) = x× y + i1 × y + x× i2 + i1 × i2. Mais comme I est un idéalbilatère il contient la somme i1 × y + x × i2 + i1 × i2, de sorte que x′ × y′ ∈ x× y. Pourconclure il suffit de vérifier que les axiomes de la définition des anneaux se transportent deA à A/I via le morphisme πI .
4! Théorème 0.3 factorisation des morphismes1. Soit f : A −→ B, un morphisme de groupes additifs, et soit H un sous-groupe de
A. L’existence d’un morphisme f : A/H −→ B tel que f = f ◦ πH est équivalente àl’inclusion H ⊂ ker f . Lorsque f existe :(a) f est unique.(b) f est surjectif si et seulement si f l’est.(c) f est injectif si et seulement si l’inclusion H ⊂ ker f est une égalité.
2. Soit f : A −→ B, un morphisme d’anneaux, et soit I un idéal de A. L’existence d’unmorphisme f : A/I −→ B tel que f = f ◦ πI est équivalente à l’inclusion I ⊂ ker f .Lorsque f existe :(a) f est unique.(b) f est surjectif si et seulement si f l’est.(c) f est injectif si et seulement si l’inclusion I ⊂ ker f est une égalité.
On a sciemment répété en parallèle l’énoncé pour la structure de groupe (additif) et pour lastructure d’anneau. Ce théorème et sa preuve fonctionnent avec n’importe quelle structurepour laquelle on dispose des notions de quotients et de noyaux. On verra que c’est le caspour la structure de module aussi. L’usage est d’illustrer ce phénomène de factorisationpar un diagramme triangulaire comme suit.
Af //
πH²²²²
B
A/Hf
==zz
zz
On parle de diagramme commutatif lorsque les divers morphismes obtenus par composi-tions (éventuelles) suivant différents chemins coïncident. Dans le cas d’un triangle la seuleégalité sous-entendue par la commutativité du diagramme est l’égalité f = f ◦ πH .
Démonstration Le point 2. se démontre comme le premier (en remplaçant partoutanneaux par groupe et sous-groupe par idéal). On démontre le point 1. Supposons qu’ilexiste un morphisme f tel que f = f ◦ πH . Montrons que H ⊂ ker f . Soit h ∈ H.On a f(h) = f(πH(h)) par hypothèse. Mais puisque h ∈ H = ker πH on en déduitf(h) = f(0A/H) = 0B car f est un morphisme. Donc h ∈ ker f et on a montré l’inclusion
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon

7Chapitre 0. Noyaux, images, quotients
H ⊂ ker f . Réciproquement supposons que H ⊂ ker f . La condition f = f ◦ πH imposef(a) = f(a) pour tout a ∈ A d’où l’unicité de f si elle existe. Pour établir cette existenceon définit f à partir de la formule f = f ◦ πH . Soit x ∈ A/H, et soit y, y′ ∈ A tels queπH(y) = πH(y′) = x. Alors y − y′ ∈ H ⊂ ker f et donc f(y) = f(y′) ne dépend que de xet pas du choix de y relevant x dans A. En posant f(x) = f(y) on définit une applicationqui est indépendante du choix des y ∈ A relevant les x ∈ A/H. Cette indépendancemontre l’égalité f = f ◦ πH . Soient x, x′ ∈ A/H et y, y′ ∈ A des relevés respectifs. Alorsf(x + x′) = f(πH(y) + πH(y′)) = f(πH(y + y′)) = f(y + y′) = f(y) + f(y′) = f(x) + f(x′).L’application f est donc un morphisme de groupe. L’équivalence entre f surjective et fsurjective est une conséquence directe de f = f ◦ πH et de la surjectivité de πH . Pourmontrer l’équivalence entre f injective et H = ker f on va énoncer un lemme un peu plusgénéral.
Lemme 0.1Soit f : A −→ B un morphisme de groupes additifs et soit H un sous-groupe de ker f . Soitf : A/H −→ B le morphisme factorisé de f (on vient de démontrer l’existence et l’unicitéde ce morphisme puisque H ⊂ ker f). Alors ker f est égal au sous-groupe ker f/H ⊂ A/H.En particulier si H = ker f alors ker f = {0G/H} et f est injectif.
Démonstration du lemme : Soit x ∈ ker f . Alors f(πH(x)) = f(x) = 0B. DoncπH(x) ∈ ker f . Cela montre ker f/H ⊂ ker f . Réciproquement soit x ∈ ker f et soity ∈ A tel que πH(y) = x. Alors f(y) = f(πH(y)) = f(x) = 0B. Donc y ∈ ker f et il suitx ∈ πH(ker f) = ker f/H. D’où l’égalité.
Définition 0.11Soit A un anneau commutatif.
1. On dit qu’un élément a ∈ A est un diviseur de zéro lorsque a 6= 0 et il existeb ∈ A, b 6= 0 tel que a × b = 0 (dans ce cas on dit aussi que b est un codiviseur dezéro de a et vice-versa).
2. A est dit intègre s’il ne contient pas de diviseur de zéro.3. Un idéal I ⊂ A est dit principal lorsqu’il existe un a ∈ A tel que I = A× a := {x ∈
A,∃α ∈ a tel que x = α× a}.4. On appelle anneau principal un anneau intègre dont tous les idéaux sont principaux.
Toutes les notions de ce chapitre sont supposées connues et on ne s’est arrêté que sur lesdémonstrations ré-utilisées dans la suite. Pour démontrer que le rang d’un module est biendéfini on utilisera plus tard le théorème de Krull et le fait que A/M est un corps si M estmaximal. On utilisera aussi le (( lemme Chinois )) qui conclura ce chapitre. On rappelleces résultats sans en donner la démonstration (celle-ci figure déjà dans le cours sur lesanneaux).
Définition 0.12Soit A un anneau commutatif unitaire.
1. Un idéal P ⊂ A est dit premier lorsque ∀x, y ∈ A xy ∈ A =⇒ x ∈ A ou y ∈ A.2. Un idéal M ⊂ A est dit maximal lorsque M 6= A et que M et A sont les seuls idéaux
contenant M.
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon

8 Groupes et Anneaux : Rappel de définitions.
Théorème 0.4Soit I un idéal d’un anneau commutatif A
1. I est premier si et seulement si A/I est intègre.2. I est maximal si et seulement si A/I est un corps.3. Théorème de Krull. Si I 6= A alors il existe un idéal M maximal dans A tel que
I ⊂ M.
Les deux premiers points sont classiques et proposés en exercice de révision sur les anneaux.Le troisième est une conséquence immédiate du lemme de Zorn, qui lui-même est équivalentà l’axiome du choix. On n’en dira pas plus dans ces rappels.Définition 0.13Soit A un anneau commutatif unitaire, et soient I et J deux idéaux de A.On dit que I etJ sont co-maximaux ou étranger lorsque I + J = A.
Lemme 0.2Soient A un anneau commutatif I et J deux idéaux de A co-maximaux , k un entier, et(Ij)
j=kj=1 une famille de k idéaux de A deux à deux co-maximaux.1. IJ = I ∩ J
2. L’ideal Ik est co-maximal à l’idéal produit∏j=k−1
j=1 Ij. En particulier les idéaux∏1≤j≤k Ij et ∩1≤j≤kIj sont égaux.
Démonstration :1. On a la chaîne d’inclusion IJ ⊂ I∩J ⊂ (I∩J)A ⊂ (I∩J)(I +J) ⊂ IJ d’où l’égalité.
(On peut aussi remarquer que l’inclusion IJ ⊂ I ∩ J subsiste en toute généralité).2. On fait une récurrence sur k. Si k = 2 c’est clair. Supposons la proposition
vraie pour un certain k − 1 ≥ 2. Alors par hypothèse et récurrence les troisidéaux I1, Ik et J =
∏k−1j=2 Ij sont deux à deux co-maximaux. Il existe donc des
xk ∈ Ik, x′k ∈ Ik, x1 ∈ I1 et j ∈ J tels que 1 = xk + x1 = x′k + j. En multipliant on
obtient 1 = xkx′k + xkj + x′kx1 + x1j. Et comme les trois premiers sommants sont
dans Ik on en déduit 1 ∈ Ik + I1J = Ik +∏k−1
j=1 Ij d’où l’hérédité de la propriété àdémontrer.
4! Théorème 0.5 Lemme ChinoisSoient A un anneau commutatif, k un entier et (Ij)
j=kj=1 une famille de k idéaux de A deux
à deux co-maximaux. On a un isomorphisme canonique :
A∏j=kj=1 Ij
=A
∩j=kj=1Ij
∼=j=k∏j=1
A
Ij
Démonstration : On peut présenter cette démonstration comme une récurrence sur kmais l’hérédité est immédiate en vertu du lemme 0.2. La seule difficulté qui subsiste estle cas particulier k = 2 qui est traité dans toutes les référence classiques. On se donnedonc I et J deux idéaux comaximaux. On considère le morphisme d’anneaux diagonalδ : A −→ A/I × A/J défini par a 7→ (a + I, a + J). Puisque I + J = A étant donné(b, c) ∈ A2 il existe i ∈ I et j ∈ J tels que b − c = i + j ou encore b − i = c + j. Soit
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon

9Chapitre 0. Noyaux, images, quotients
α = b− i = c+ j, alors α ≡ b[I] et α ≡ c[J ], donc α est un antécédent de (b+I, c+J) pourδ qui est surjective. Clairement ker δ = I ∩ J et on obtient l’isomorphisme annoncé parfactorisation de δ. On peut aussi remarquer que le morphisme diagonal se factorise en toutegénéralité en un morphisme injectif A/I∩J −→ A/I×A/J . L’hypothèse de co-maximalitén’est utilisée que pour la surjectivité et l’égalité entre produit et intersection d’idéaux.
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon

10 Groupes et Anneaux : Rappel de définitions.
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon
11Chapitre 1.
Chapitre 1
Modules sur un anneaucommutatif : Généralités.
1.1 Modules, sous-modules, applications linéaires.
Soit A un anneau unitaire.Définition 1.1 structure de A-moduleSoit M un groupe additif.
1. Une opération externe à gauche de A sur M est une application notée (a,m) 7→ amdu produit cartésien A×M dans M .
2. On dit que M est un module à gauche sur A (ou A-module à gauche) lorsqu’ilexiste une opération externe à gauche de A sur M vérifiant les axiomes (Pour toutm,m′ ∈ M et tout a, b ∈ A) :(a) a(m + m′) = am + am′
(b) (a + b)m = am + bm
(c) 1Am = m
(g) (ab)m = a(bm)
3. Soient M et N deux A-module à gauche. On appelle application A-linéaire oumorphisme de A-modules un morphisme de groupes f : M −→ N compatible avecl’opération de A, autrement dit tel que, pour tout m ∈ M et tout a ∈ A, on aitf(am) = af(m). On note HomA(M,N) l’ensemble des applications A-linéaires de Mdans N .
4. Soit M un A-module à gauche, et soit N ⊂ M . On dit que N est un sous-moduleà gauche de M lorsque N est un sous-groupe de M stable pour l’opération de A,autrement dit lorsque, pour tout a ∈ A et tout n ∈ N , on a an ∈ N .
Lorsque A est commutatif l’axiome (g) ci-dessus est équivalent à l’axiome (d) suivant :(ab)m = b(am). Cependant ce dernier axiome se retient mieux en notant l’opération deA comme une opération à droite (une application (m, a) 7→ ma de M × A dans M)puisque cela donne alors (d) : m(ab) = (ma)b. Pour cette raison, avec des anneaux noncommutatif, on distingue les structures de modules à gauche (vérifiant l’axiome (g)) etles structure de module à droite (vérifiant l’axiome (d)). Si A est un anneau, on note Aop
l’anneau obtenu à partir de A mais avec la nouvelle multiplication a ∗ b := ba. Alors tout
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon

12 Modules sur un anneau commutatif : Généralités.
A-module à droite est canoniquement muni d’une structure de Aop-module à gauche. Pourcette raison si on garde en mémoire que les deux structures existent et sont distinctes, onpeut indifféremment étudier la structure de module à gauche ou à droite. Dans ce cours(comme dans la plus part des ouvrages français) on étudie la structure de module à gauche(et on dira (( module )) plutôt que (( module à gauche ))).
Par définition un sous-modules N ⊂ M est un sous-ensemble stable pour les opérationslinéaires. Par restriction des opérations de M on définit un loi de composition additiveinterne à N et une opération externe de A sur N . Le sous-ensemble N est ainsi muni d’unestructure de A-module et l’inclusion N ⊂ M est alors un morphisme de A-modules.
Proposition 1.1 propriétés basiquesSoit M un A-module, m ∈ M , a ∈ A, N ⊂ M , et P un A-module.
1. 0Am = 0M
2. (−1A)m = −m
3. a0M = 0M
4. N est un sous-module de M si et seulement si N 6= Ø et pour tout x, y ∈ N et toutα, β ∈ A alors αx + βy ∈ N .
5. Une application f : M −→ P est A-linéaire si et seulement si pour tout α, β ∈ A ettout x, y ∈ M on a f(αx + βy) = αf(x) + βf(y).
Preuve Cela suit de la définition.
1. On a 0Am + m = (0A + 1A)m = (1A)m = m. Et comme dans le groupe additif M onpeut simplifier par m, on obtient 0Am = 0M .
2. Il s’agit de montrer l’égalité (−1A)m + m = 0M . Cela suit du 1., car (−1A)m + m =(−1A)m + (1A)m = (−1A + 1A)m = 0Am = 0M .
3. On a am = a(0M + m) = a0M + am. Pour conclure on simplifie par am dans legroupe additif M .
4. On suppose que N est un sous-module de M . Alors N est un sous-groupe donc nonvide. Soient donc α, β ∈ A et x, y ∈ N . Puisque N est un sous-module αx ∈ N etβy ∈ N . Puisque N est un sous-groupe αx + βy ∈ N . Cela montre le sens direct del’équivalence. Réciproquement on suppose N non vide et contenant αx+βy pour toutα, β ∈ A et tout x, y ∈ N . En particulier pour β = 0, on voit que N contient αx pourtout α ∈ A et tout x ∈ N . Il suffit donc de montrer que N est un sous-groupe de M .Mais N est supposé non vide, et pour tout x, y ∈ N on a x−y = 1Ax+(−1A)y ∈ N :cela montre que N est un sous-module de M .
5. Soient x, y ∈ M et soit α, β ∈ A. Si f est A linéaire c’est un morphisme degroupes. Donc f(αx + βy) = f(αx) + f(βy). Puis comme f est A-linéaire on af(αx + βy) = αf(x) + βf(y). Cela donne le sens direct de l’équivalence annoncée.Réciproquement on suppose que pour tout α, β ∈ A et tout x, y ∈ M on aitf(αx + βy) = αf(x) + βf(y). Alors si on prend α = β = 1A dans la formulequi précède on montre que f est un morphisme de groupe. Si on prend β = 0A onmontre que f vérifie la seconde propriété des morphismes de A-modules.
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon

13Chapitre 1. Modules, sous-modules, applications linéaires.
Proposition 1.2Soit M un A-module, soit (Ns)s∈S une famille quelconque de sous-modules de M et P1 etP2 deux sous-modules de M .
1. L’intersection N =⋂
s∈S Ns est un sous-module de M .2. On note
∑s∈S Ns l’ensemble des sommes finies d’éléments de Ns. C’est un sous-
module de M . En particulier lorsque S = {1, 2} l’ensemble N1 + N2 des sommesd’éléments de N1 et de N2 est un sous-module de M .
3. Si P1
⋃P2 est un sous-module de M alors P1 ⊂ P2 ou P2 ⊂ P1.
Démonstration.
1. Soient x, y dans N . Alors pour tout α, β dans A comme chaque Ns est un sous-module contenant x et y il contient αx + βy. Donc αx + βy ∈ N .
2. Toute combinaison linéaire de sommes finies d’éléments de Ns est encore une sommefinie d’éléments de Ns.
3. On suppose P1 et P2 ne sont pas inclus l’un dans l’autre. Alors il existe p1 ∈ P1 etp2 ∈ P2 tels que p1 6∈ P2 et p2 6∈ P1. Puisque les Pi sont des sous-modules il vientp1 + p2 6∈ P1 et p1 + p2 6∈ P2, alors que p1 et p2 appartiennent à la réunion P1
⋃P2.
Exemples
1. Si A est un corps la structure de A-module est identique à celle de A-espace vectoriel.
2. A est un A-module : la multiplication interne tient lieu d’opération externe.
3. Les sous-A-modules de A sont les idéaux de A (à gauche si A n’est pas commutatif).
4. Si M est un A-module il contient les sous-modules triviaux {0M} et M . On dit queM est simple s’il n’en contient pas d’autres (et si M 6= {0M}).
Définition 1.2Soit M et N deux A-modules.
1. On appelle endomorphisme de M une application A-linéaire de M dans M . On notedonc EndA(M) = HomA(M,M) l’ensemble des endomorphismes de M .
2. On appelle isomorphisme de M dans N un morphisme linéaire bijectif.3. On appelle automorphisme de M un isomorphisme de M dans M . On note AutA(M)
l’ensemble des automorphismes de M .
La terminologie (( isomorphisme )) pour morphisme bijectif est justifiée car la bijectionréciproque d’un morphisme linéaire est linéaire :
Proposition 1.3Soient M et N deux A-modules et soit f : M −→ N un isomorphisme. Alors la bijectionréciproque de f est A-linéaire.
Démonstration Soit α, β ∈ A et soit x, y ∈ N . On applique f à αf−1(x) + βf−1(y). Parlinéarité de f on obtient : f(αf−1(x) + βf−1(y)) = αf(f−1(x)) + βf(f−1(y)) = αx + βy.En appliquant f−1 à cette égalité il vient αf−1(x) + βf−1(y) = f−1(αx + βy).
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon

14 Modules sur un anneau commutatif : Généralités.
Lemme 1.1Soit S un ensemble, soient M, N et P des A-modules, soient f, g ∈ HomA(M, N), et soith ∈ HomA(N,P ). On note NS l’ensemble des applications de S dans M
1. Soit α, β ∈ NS. Alors la formule (valable pour tout s ∈ S) (α + β)(s) = α(s) + β(s)définit une application α + β ∈ NS. Avec cette loi de composition interne NS est ungroupe additif.
2. L’application f + g ∈ NM est A-linéaire. En particulier HomA(M, N) est un sous-groupe additif de NM , donc un groupe.
3. Soit a ∈ A et α ∈ NS. Alors la formule (valable pour tout s ∈ S) (aα)(s) = aα(s)définit une application aα ∈ NS. Muni de cette opération externe de A le groupe NS
est un A-module.4. Soit a ∈ A. Si A est commutatif alors l’application af ∈ NM est A-linéaire. En
particulier HomA(M, N) est un sous-A-module de NM , donc un A-module.5. L’application composée h ◦ f est A-linéaire. En particulier pour M = N = P la
composition des applications est une seconde loi interne sur EndA(M). Muni decette multiplication EndA(M) est un anneau (en même temps qu’un A-module si Aest commutatif).
Démonstration.1. On transporte la structure de groupe de N dans NS. L’application 0NS définie
par ∀s ∈ S 0NS(s) = 0N est manifestement un neutre additif dans NS. Sif ∈ NS l’application x 7→ −f(x) est un inverse additif de f . L’associativité etla commutativité dans NS se déduisent respectivement de l’associativité et de lacommutativité dans N .
2. Montrons que (f + g) est A-linéaire. Soient x, y ∈ M et soient α, β ∈ A. Pardéfinition de (f + g) on a (f + g)(αx + βy) = f(αx + βy) + g(αx + βy). Puisquef et g sont A-linéaires on a (f + g)(αx + βy) = αf(x) + βf(y) + αg(x) + βg(y) =α(f(x) + g(x)) + β(f(y) + g(y)). On utilise à nouveau la définition de f + g quidonne (f + g)(x) = f(x) + g(x) et (f + g)(y) = f(y) + g(y) et on conclut à(f + g)(αx + βy) = α(f + g)(x) + β(f + g)(y).
3. (a, f) 7→ af telle que défini dans l’énoncé est bien une opération externe de A surNS. On transporte la structure de module de N dans NS : en utilisant les propriétés(a), (b), (c) et (g) dans N on obtient les propriétés analogues pour les images desapplications en s ∈ S fixé quelconque c’est-à-dire pour les applications elles-mêmes.
4. Montrons que af est linéaire. Soient α, β ∈ A et soit x, y ∈ M . Alors par ladéfinition de (af), la linéarité de f et la commutativité de A, on a (af)(αx + βy) =a(f(αx + βy)) = a(αf(x) + βf(y)) = aαf(x) + aβf(y) = α(af)(x) + β(af)(y).
5. Par définition de h◦f et linéarité de f et h on a pour tout α, β ∈ A et tout x, y ∈ M :
h◦f(αx+βy) = h(αf(x)+βf(y)) = αh(f(x))+βh(f(y)) = α(h◦f)(x)+β(h◦f)(y).
Cela donne la linéarité de h ◦ f . Dans le 2 on a vu que EndA(M) est un groupeadditif. La composition des applications linéaires admet l’identité comme élémentunité et est associative. Soient f, g, h ∈ EndA(M). Pour tout m ∈ M , on a(f +g)◦h(m) = (f +g)(h(m)) = f(h(m))+g(h(m)) = (f ◦h+g◦h)(m) d’une part, et(f ◦(g+h))(m) = f((g+h)(m)) = f(g(m))+f(h(m)) = (f ◦g+f ◦h)(m) par linéarité
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon
15Chapitre 1. Noyaux, images, produits directs, sommes directes et quotients
de f d’autre part. Cela donne la distributivité de ◦ par rapport à + et montre queEndA(M) est un anneau. Le plus souvent cet anneau n’est pas commutatif (penserà l’anneau des K-endomorphisme d’un K-espace vectoriel de dimension 2).
Définition 1.3On appelle A-algèbre un ensemble B qui est à la fois un A-module et un anneau. Lesmorphismes de A-algèbres sont les morphismes d’anneaux A-linéaires.
Exemples1. Un groupe additif M est canoniquement un Z-module : voir exercice 12.2. Se donner une structure de A-module sur un groupe additif M équivaut à se donner
un morphisme d’anneau A −→ EndZ(A) : voir exercice 13.3. Soit K un corps (commutatif), V un K-espace vectoriel. Se donner une structure deK[X]-module sur V qui étende la structure de K-espace vectoriel de V équivaut àse donner un morphisme de K-algèbre ϕ : K[X] −→ EndK(V ). Pour toute K-algèbreB et tout b ∈ B, il existe un unique morphisme de K-algèbre ϕ : K[X] −→ B telque ϕ(X) = b. En résumé les structures de K[X]-modules sur V compatibles avec lastructure de K-espace vectoriel initiale sont en bijection avec EndK(V ) : voir exercice14.
1.2 Noyaux, images, produits directs, sommes directeset quotients
Proposition 1.4Soit f : M −→ N un morphisme de A-modules (en particulier un morphisme de groupesadditifs).
1. Le noyau de f , ker f = {m ∈ M ; f(m) = 0} est un sous-module de M .2. L’image de f , Im f = {n ∈ N ; ∃m ∈ M tel que n = f(m)} est un sous-module de
N .
Démonstration.1. ker f est un sous-groupe de M par la proposition 0.2. Soit x ∈ ker f et soit α ∈ A.
Alors on a f(αx) = αf(x) = α0 = 0. Donc αx ∈ ker f ce qui montre que ker f estun sous-module de M .
2. Im f est un sous-groupe de N par la proposition 0.2. Soit x ∈ Im f et soit α ∈ A.Comme x ∈ Im f , il existe un antécédent y ∈ M de x, c’est-à-dire tel que f(y) = x.Alors par linéarité de f , αy est un antécédent de αx qui appartient donc à Im f . Celamontre que Im f est un sous-module de N .
Proposition 1.5Soit S un ensemble et (Ms)s∈S une famille de A-modules indexée par S. Les lois définiespar (ms) + (ns) = ((m + n)s) et α(ms) = (αms) confèrent au produit cartésien
∏s∈S Ms
une structure de A-module.
Démonstration : C’est évident.
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon

16 Modules sur un anneau commutatif : Généralités.
Définition 1.4On appelle module produit des (Ms)s∈S et on note
∏s∈S Ms le A-module de la proposition
1.5.
Proposition 1.6Soit S un ensemble et (Ms)s∈S une famille de A-modules indexée par S. L’ensemble des(ms)s∈S ∈
∏s∈S Ms tels que ms = 0 pour tout s ∈ S sauf un nombre fini, est un sous-
module de∏
s∈S Ms.
Démonstration : C’est évident.
Définition 1.5On appelle somme directe des (Ms)s∈S et on note
⊕s∈S Ms le sous-module de
∏s∈S Ms de
la proposition 1.6.
Remarques
1. Lorsque S est fini, les modules⊕
s∈S Ms et∏
s∈S Ms sont égaux.
2. Lorsque les modules Ms sont tous égaux à M l’application f 7→ (f(s))s∈S est unisomorphisme de MS sur
∏s∈S M . L’usage est d’identifier ces deux modules. Par
cette identification la somme directe ⊕s∈SM s’identifie au sous-module M (S) formédes applications f : S −→ M à support fini (c’est-à-dire telle que f(s) = 0M pourtout s sauf éventuellement pour un nombre fini de s).
3. Prenons S = N. Le module A(N) est naturellement isomorphe (en tant que module)au module A[X] des polynômes à une indéterminée et à coefficient dans A. Lemodule AN est naturellement isomorphe (en tant que module) au module A[[X]]des séries formelles à une indéterminée à coefficients dans A. Pour A = F2 le corpsà deux éléments le module F(N)
2 est dénombrable tandis que FN2 est en bijection avecl’ensemble des parties de N, c’est-à-dire en bijection avec R. Il n’existe donc aucunebijection (a fortiori aucun isomorphisme de modules) entre F(N)
2 et FN2 .
Proposition 1.7Pour tout t ∈ S, on définit des applications it : Mt −→ ⊕s∈SMs et pt :
∏s∈S Ms −→ Mt
comme suit.
Pour m ∈ Mt on pose i(m) = (is(m))s∈S avec is(m) =
{0 si s 6= tm si s = t
Pour (ms)s∈S ∈∏
s∈S Ms on pose pt((ms)s∈S) = mt.
On a :1. Les applications pt et it sont A-linéaires.2. Soit ı : ⊕s∈S Ms −→
∏s∈S Ms l’injection canonique. Alors le morphisme composé
pt ◦ ı ◦ it est égal à l’identité de Mt.
Démonstration : C’est évident.
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon

17Chapitre 1. Noyaux, images, produits directs, sommes directes et quotients
Théorème 1.1Soit A un anneau et soit (Ms)s∈S une famille de A-modules.
1. Pour tout A-module M et toute famille de morphismes fs : Ms −→ M , il existe ununique morphisme f : ⊕s∈S Ms −→ M vérifiant ∀s ∈ S, f ◦ is = fs. On note parfois⊕s∈Sfs l’unique morphisme qui précède.
2. Pour tout A-module M et toute famille de morphismes gs : M −→ Ms, il existe ununique morphisme g : M −→ ∏
s∈S Ms vérifiant ∀s ∈ S, ps ◦ g = gs.
Démonstration.1. On pose f((ms)s∈S) =
∑s∈S fs(ms). Comme les ms sont nuls sauf un nombre fini,
la somme est finie et ceci définit bien une application f : ⊕s∈S Ms −→ M . Cetteapplication vérifie trivialement la condition ∀s ∈ S, f ◦ is = fs. Pour la linéarité onprend a, b ∈ A et (ms), (ns) ∈ ⊕Ms. En utilisant la définition de f , de la structurede module de la somme directe et la linéarité des fs on obtient :
f(a(ms)s∈S + b(ns)s∈S) = f((ams + bns)s∈S)=
∑s fs(ams + bns)
=∑
s afs(ms) + bfs(ns)= a
∑s fs(ms) + b
∑s fs(ns)
= af((ms)s∈S) + bf((ns)s∈S)
Soit f ′ une application A-linéaire vérifiant ∀s ∈ S, f ′ ◦ is = fs. Alors f ′ et fcoïncident sur les images des is. Par linéarité ces morphismes sont aussi égaux surtoute combinaisons linéaire d’éléments de ces images c’est-à-dire sur tout élément dela somme directe : on a bien f = g.
2. On pose g(m) = (gs(m))s∈S. L’application g est alors A-linéaire par la définition dela structure de A-module du produit, et l’hypothèse de linéarité des gs. Clairementg vérifie ps ◦ g = gs. Supposons que g′ : M −→ ∏
s∈S Ms soit une autre morphismevérifiant cette condition. Si m ∈ M on note g′(m) = (g′s(m))s∈S et donc g′s(m) lacomposante en Ms de g′(m). la condition g′ ◦ ps = gs impose g′s(m) = gs(m). Enconséquence les composantes en tout s de g′(m) et g(m) sont égales : on a bieng′ = g.
Les conditions f ◦ it = ft et pt ◦ g = gt se représentent avec les diagrammes commutatifsci-dessous. ⊕
s∈S Ms
f $$IIIIIIIII
M
Mt
it
OO
ft
99tttttttttt
∏s∈S Ms
pt
²²
M
gddIIIIIIIII
gtzztttttttttt
Mt
Les morphismes f et g sont définis "coordonnées par coordonnées" c’est-à-dire au traversdes ps et des is et les détails sont expliqués dans la preuve du théorème 1.1. Cette propriété ;de la somme et des injections is d’une part, et du produit et des projection ps d’autrepart ; s’appelle la propriété universelle de la somme (respectivement du produit) direct. Aisomorphismes près il n’y a qu’un seul module qui vérifie cette propriété pour tout M ettoute famille de fs (respectivement gs).
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon

18 Modules sur un anneau commutatif : Généralités.
Théorème 1.2Soient M un A-module, N un sous-module de M , soit M/N le groupe additif quotient etsoit πN : M −→ M/N la projection canonique. Il existe sur M/N une unique structure deA-module pour laquelle πN est A-linéaire.
Démonstration Il suffit de vérifier que l’opération externe am = am est bien définie.Soit m′ un autre choix de représentant dans M de la classe m. Alors il existe n ∈ N telque m′ = m + n. Il vient donc am′ = a(m + n) = am + an. Et comme an ∈ N on abien am′ = am. La suite de la démonstration consiste à transporter via πN la structurede A-module de M sur M/N . Autrement dit on utilise les propriétés (a), (b), (c) et (g)qui sont vraies pour tout a, b ∈ A et tout m,m′ ∈ M pour établir les mêmes propriétésconcernant a, b ∈ A et m, m′ ∈ M/N .
4! Théorème 1.3 factorisation des morphismes de modulesSoit f : M −→ N , un morphisme de A-modules, et soit P un sous-module de M . L’existenced’un morphisme f : M/P −→ N tel que f = f ◦πP est équivalente à l’inclusion P ⊂ ker f .Lorsque f existe :
1. f est unique.2. f est surjectif si et seulement si f l’est.3. f est injectif si et seulement si l’inclusion H ⊂ ker f est une égalité.
Démonstration. Par le théorème de factorisation des morphismes de groupes additifs,il suffit de vérifier que si P ⊂ ker f le morphisme de groupe f : M/P −→ N estaussi A-linéaire. Soit a ∈ A, soit x ∈ M/P et soit m ∈ M tel que πP (m) = x.Par définition de la structure de module de M/P on a ax = πP (am). On obtientf(ax) = f(πP (am)) = f(am) = af(m) = af(πP (m)) = af(x).
4! Corollaire 1.3.1 premier théorème d’isomorphie de NoetherSoient M et N deux sous-modules d’un même A-module L. On a un isomorphisme naturel
M
M ∩N∼= M + N
N.
Démonstration Soit f : M −→ (M +N)/N obtenu en composant l’inclusion M ⊂ M +Navec la projection πN : M + N −→ (M + N)/N . Alors f est surjective puisque m est unantécédent de la classe m + n ∈ (M + N)/N pour tout m ∈ M et tout n ∈ N . Clairementker f = M ∩ N et on obtient l’isomorphisme annoncé par factorisation de f (c’est-à-direen appliquant le théorème 1.3).
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon

19Chapitre 1. Noyaux, images, produits directs, sommes directes et quotients
4! Corollaire 1.3.2Soit (Ns)s∈S une famille de sous-modules d’une famille de modules (Ms)s∈S. On noteαs : Ns −→ ⊕t∈SMt le morphisme composé des injections canoniques Ns ⊂ Ms et desıs : Ms −→ ⊕t∈SMt et α = ⊕αs : ⊕s∈S Ns −→ ⊕s∈SMs le morphisme défini dans le point2. du théorème 1.1. Le morphisme α est injectif. En identifiant ⊕sNs avec Im α ⊂ ⊕sMs,On a un isomorphisme naturel
⊕s∈SMs
⊕s∈SNs
∼= ⊕s∈SMs
Ns
Démonstration Soit (ns)s∈S ∈ ker α ⊂ ⊕sNs. Alors dans ⊕sMs on a (0)s∈S = (αs(ns))s∈S
et puisque les αs sont injectifs ns = 0 pour tout s. Cela montre l’injectivité de α. Ondéfinit un morphisme f : ⊕s Ms −→ ⊕sMs/Ns en prenant le morphisme somme directe desmorphismes obtenus par composition de πNs avec ıs : Ms/Ns −→ ⊕t∈SMt/Nt. Si (ms)s∈S
appartient au noyau ker f alors pour tout s on a ns = 0 ∈ Ms/Ns, et donc ms ∈ Ns. Onobtient bien ker f = Im α puis l’isomorphisme annoncé par factorisation de f .Proposition 1.8Soient M un A-module, soit P un sous-module de M et πP : M −→ M/P la projectioncanonique. L’application N 7→ πP (N) est une bijection de l’ensemble des sous-modulede M contenant P sur l’ensemble des sous-module de M/P . La bijection réciproque estQ 7→ π−1
P (Q).
Démonstration : Soit N un sous-module de M contenant P . Comme πP est un morphismeπP (N) est un sous-module de M/P . Soit Q un sous-module de M/P alors π−1
P (Q) est unsous-module de N contenant P = π−1
P ({0}) puisque Q contient {0}. Les deux applicationsde l’énoncé sont donc bien définies et appliquent l’un dans l’autre les ensembles annoncés.Elles sont réciproques l’une de l’autre, donc bijectives.Remarques : La restriction de πP au sous-modules N contenant P est un morphismesurjectif N −→ πP (N). Le noyau de ce morphisme est P , il se factorise donc en unisomorphisme N/P ∼= πP (N). On aurait donc pu identifier πP (N) et N/P dans l’énoncéqui précède.
4! Corollaire 1.3.3 Second théorème d’isomorphie de NoetherSoient P ⊂ N deux sous-module d’un même A-module M . On a un isomorphisme naturel
M
N∼= M/P
N/P.
Démonstration On a utilisé la remarque qui précède le corollaire pour identifier N/Pavec le sous-module πP (N) ⊂ M/P . C’est pourquoi ce corollaire du théorème 1.3 apparaîtici et non aussitôt après son théorème. On part des morphismes surjectifs πP : M −→ M/Pet πN/P : −→ (M/P )/(N/P ). Soit f le morphisme composé f = πN/P ◦ πP . Alors f estsurjectif. Soit m ∈ M on a les équivalences :
m ∈ ker f ⇐⇒ πN/P (πP (m)) = 0 ⇐⇒ πP (m) ∈ πP (N) ⇐⇒ ∃n ∈ N, πP (m) = πP (n).
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon

20 Modules sur un anneau commutatif : Généralités.
Comme P ⊂ N , il suit ker f = N et on obtient l’isomorphisme annoncé par factorisationde f .
Définition 1.6Soient M un A-modules, M1 et M2 des sous-modules de M .
1. On dit que M est somme directe interne de M1 et M2 lorsque M = M1 + M2 etM1 ∩M2 = {0}.
2. Lorsque M est somme directe interne de M1 et M2 on dit que M1 est facteur directde M , et que M2 est un supplémentaire à M1 dans M .
Remarque Lorsque A est un corps tout sous-espace vectoriel de tout espace vectorielsur A admet un (donc des) supplémentaire(s). Ceci est faux en général. Par exemple lesous-module 2Z ⊂ Z n’a pas de supplémentaire. En effet si I 6= {0} est un idéal de Z on a{0} 6= 2I et 2I ⊂ I ∩ 2Z. Et comme Z 6= 2Z l’égalité Z = I ⊕ 2Z est impossible.
Définition 1.7Soient M un A-module et (Mi)i∈I une famille de sous-modules de M . On dit que M estsomme directe interne des Mi lorsque M =
∑i∈I Mi et que pour tout j ∈ I l’intersection
Mj ∩∑
j 6=i Mi est réduite à {0}.
Proposition 1.9Soient M un A-module et (Mi)i∈I une famille de sous-modules de M . Soient fi : Mi −→ Mles injections canoniques et soit f :
⊕i∈I Mi −→ M le morphisme ⊕ifi défini dans le point
2 du théorème 1.1. Les assertions suivantes sont équivalentes :(1) M est somme directe interne des Mi.(2) Pour tout m ∈ M il existe une unique famille finie de mi ∈ Mi telle que m =
∑i
mi.
(3) f est un isomorphisme.
Démonstration.1. On montre l’implication (1) =⇒ (2). Puisque M =
∑i∈I Mi tout élément de M
s’écrit comme une somme finie d’éléments mi ∈ Mi. Pour l’unicité il suffit de vérifierque si une somme finie d’éléments mi ∈ Mi est nulle alors tous les mi sont nuls. Soient
(mik)1≤k≤n une famille finie d’éléments mik ∈ Mik telle quen∑
k=1
mik = 0. Alors pour
tout j avec 1 ≤ j ≤ n le sommant mij = −∑1≤k≤n,k 6=j mik appartient à l’intersection
Mij ∩∑
k 6=ij
Mk. Donc mij = 0.
2. On montre l’implication (2) =⇒ (3). Par (2) l’application ϕ : m 7→ ∑i ıi(mi) est
bien définie. Un calcul immédiat montre que f et ϕ sont réciproques l’une de l’autre :ce sont bien des isomorphismes.
3. On montre l’implication (3) =⇒ (1). Par définition même le module ⊕iMi estsomme directe interne des sous-modules ıi(Mi). Si f est un isomorphisme on obtientalors que M est somme directe interne des sous-modules f(ıi(Mi)) = Mi
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon

21Chapitre 1. Systèmes libres, générateurs, bases, rang.
1.3 Systèmes libres, générateurs, bases, rang.Dorénavant on suppose en outre que l’anneau unitaire A est commutatif. La notion derang d’un module libre sur un anneau commutatif unitaire est analogue à la dimensiondes espaces vectoriels. Elle nécessite cependant (au moins) une étape supplémentaire pourêtre définie, et ne subsiste pas en toute généralité. On définit ici le rang d’un module libresur un anneau commutatif unitaire. Signalons qu’il est possible de définir le rang d’unmodule quelconque sur un anneau intègre et une famille de P-rangs (a priori distincts)d’un module quelconque indexée par les idéaux premiers P de l’anneau A (quelconque).Ces notions ne seront pas définies ici.Définition 1.8Soit M un A-module, soit S un ensemble, T ⊂ M un sous-ensemble de M et F = (ms)s∈S
une famille d’éléments de M .1. On dit que T est un système générateur de M (ou que T engendre M) lorsque pour
tout x dans M il existe une famille (λt)t∈T d’éléments de A tous nuls sauf un nombrefini et tels que x =
∑t∈T λtt.
2. On dit que F est une famille génératrice lorsque le sous-ensemble⋃
s∈S{ms} ⊂ M estun système générateur, c’est-à-dire lorsque pour tout x dans M il existe une famille(λs)s∈T d’éléments de A tous nuls sauf un nombre fini et tels que x =
∑s∈S λsms.
3. On dit que F est une famille libre lorsque la seule famille (λs)s∈S d’éléments de Atous nuls sauf éventuellement un nombre fini et vérifiant 0 =
∑s∈S λsms est la famille
nulle.4. On dit que F est une base de M lorsque pour tout x dans M il existe une
unique famille (λs)s∈S d’éléments de A tous nuls sauf un nombre fini et tels quex =
∑s∈S λsms.
Remarques Vous connaissez déjà cette définition dans le cadre des espaces vectoriels.Ces notions en elles-même ne changent pas. Par contre dans le cadre de la théorie desmodules sur un anneau qui n’est pas un corps on rencontre un problème d’existence. Onne dispose plus du théorème de la base incomplète. Par exemple dans Z vu comme modulesur Z l’élément 2 est libre, non générateur mais tout x de Z est lié à 2 par 2x−x2 = 0 : on nepeut pas compléter 2 en une Z-base de Z. Bien sur Z admet la Z-base 1, mais par exemplele module Z/15Z sur Z n’admet aucun système libre (en effet pour tout x ∈ Z/15Z on a15x = 0). A fortiori il n’existe pas de Z-base de Z/15Z. Après avoir constaté l’existence demodules qui n’admettent pas de bases on pose la définition :Définition 1.9On dit que M est un A module libre (de base B) lorsqu’il existe une famille B d’élémentsde M qui soit une base de M .
On rencontre ici la première vraie différence entre la théorie des modules sur un anneau etcelle des espaces vectoriels sur un corps : ces derniers sont tous libres. De même on ne peutpas toujours extraire une base d’un système générateur. Par exemple 2 et 3 engendrent Zmais sont liés par 2 × 3 = 3 × 2, et ni {2} ni {3} ne sont des systèmes générateurs de Z.Le problème tient à ce que l’on ne peut plus diviser les relations de dépendance linéaireλ1x1 =
∑i6=1 λixi par λ1 même si λ1 est non nul. De sorte qu’une telle relation linéaire
n’implique pas forcément que x1 appartient au sous-module engendré par les autres xi. Vous
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon

22 Modules sur un anneau commutatif : Généralités.
pouvez reprendre un cours d’algèbre linéaire sur les corps de seconde année et constaterque pratiquement tous les résultats utilisent soit le théorème de la base incomplète soit leprincipe d’extraction de base à partir de système générateurs. La proposition qui suit faitexception :Proposition 1.10Soit S un ensemble et soit F = (ms)s∈S une famille d’éléments d’un A-module M .
1. La famille F est une A-base de M si et seulement si F est à la fois libre et génératrice.2. On suppose que F est une A-base de M . Soit f : A(S) −→ M l’application définie
par la formule f((as)s∈S) =∑
asms. Alors f est un isomorphisme de A-modules.3. Soit N le plus petit sous-module de M contenant F . Alors F est une famille
génératrice de N .
Démonstration.1. Revoir n’importe quel cours d’algèbre linéaire sur un corps : la démonstration n’utilise
pas de divisions et s’applique donc encore ici.2. L’application f est clairement A-linéaire. La définition de A-base montre que tout
x ∈ M admet un et un seul antécédent pour f qui est donc bijective.3. Avant de commencer la preuve on remarque que l’existence de N est assurée en
prenant l’intersection de tous les sous-module de M contenant S. Soit L l’ensembledes combinaisons A-linéaires et finies entre éléments de S. Clairement L est un sous-module de M , et S est un système générateur de L. Puisque S ⊂ L on a N ⊂ L.Puisque N est un sous-module L ⊂ N . Donc L = N et S engendre N .
Définition 1.10On reprend les notations de la proposition 1.10.
1. Le module N du 3 de la proposition 1.10 se note 〈S〉 et on l’appelle le sous-modulede M engendré par S.
2. On dit qu’un module M est de type fini lorsqu’il existe un sous-ensemble fini F ⊂ Mtel que 〈F 〉 = M .
Lemme 1.2Soient S et T deux ensembles. On suppose qu’il existe un isomorphisme f : A(S) −→ A(T ).Alors les ensembles S et T ont même cardinal.
Vous connaissez certainement ce résultat lorsque les ensembles S et T sont finis et l’anneauA est un corps : cela revient essentiellement à dire que la dimension des espaces vectoriels detype fini est bien définie. Il se trouve que ce résultat reste vrai en algèbre linéaire classiqueavec des ensembles S et T quelconques, fait que l’on va admettre dans ce cours.
Lemme 1.3Le lemme 1.2 est vrai si A est un corps.
Démonstration : admis
On démontre comment étendre ce résultat aux modules sur les anneaux quelconques.Vous pouvez ainsi obtenir une démonstration complète du résultat lorsque S et T sont finis,
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon

23Chapitre 1. Suites exactes, torsion.
ce qui suffit pour la suite du cours. Pour généraliser des espaces vectoriels aux modulescela ne simplifie en rien de supposer S et T fini en on ne le fait pas.
Démonstration du lemme 1.2 Par le théorème de Krull rappelé dans le théorème0.4 l’anneau A contient (au moins) un idéal maximal, on le note M. L’idée est de passerau quotient modulo M pour retrouver le terrain connu des A/M-espaces vectoriels. Onconsidère les sous-modules M(S) ⊂ A(S) et M(T ) ⊂ A(T ). Par le corollaire 1.3.2 on a lesisomorphismes de A-modules A(S)/M(S) ∼= (A/M)(S) et A(T )/M(T ) ∼= (A/M)(T ). On admetprovisoirement l’identité M(S) = f−1(M(T )). Alors par passage au quotient on définit unmorphisme A-linéaire (donc A/M-linéaire) f : (A/M)(S) −→ (A/M)(T ) qui fait commuterle diagramme :
A(S)f //
πM(S)
²²²²
A(T )
πM(T )
²²²²(A/M)(S) f // (A/M)(T )
f est bien défini et bijectif car πM(T ) ◦ f est surjectif et son noyau vaut ker(πM(T ) ◦ f) =f−1(ker πM(T )) = f−1(M(T )) = M(S). On a donc un isomorphisme entre les A/M-espaces vectoriels (A/M)(S) et (A/M)(T ). En d’autres termes ces deux espaces ont mêmedimension : S et T ont même cardinal.Pour finir la preuve on doit maintenant montrer l’égalité M(S) = f−1(M(T )). On montred’abord l’inclusion f−1(M(T )) ⊂ M(S). Soit (et)t∈T la base canonique de A(T ). Clairement lemodule M(T ) est engendré par les éléments de la forme met si m parcourt M et t parcourtT . Mais comme M est un idéal les f−1(met) = mf−1(et) appartiennent à M(S). Celadonne l’inclusion f−1(M(T )) ⊂ M(S). En appliquant le même raisonnement à f on obtientaussi l’inclusion f(M(S)) ⊂ (M(T )). Il suit alors M(S) = f−1(f(M(S))) ⊂ f−1(M(T )) d’oùl’égalité.
Définition 1.11Soit M un module libre. On appelle rang de M le cardinal d’une base de M . Le lemmequi précède montre que le rang d’un module libre est bien défini.
Bien entendu si S est un ensemble alors A(S) est un module libre avec sa base canonique.Le rang de A(S) est donc le cardinal de S. Dans le cas particulier où S = {1, ..., s} estl’ensemble fini de cardinal s on retrouve la notation standard As = AS = A(S).
1.4 Suites exactes, torsion.
Exemple de suite exacte courte. Soit N ⊂ M des A-modules. On note ı : N −→ Met π : M −→ M/N les morphismes canoniques. Alors ı est injectif, π est surjectif, lacomposée π ◦ ı est nulle et on a même l’égalité Im(ı) = ker(π). Cette situation se produittrès souvent et il est commode de parler dans ce cas de suites exactes de A-modules :
0 // Nı // M
π // M/N // 0
Dans cette suite de morphismes les applications {0} −→ N et M/N −→ {0} sont les seulespossibles et on note 0 le module réduit à {0} par abus. Plus généralement on peut parlerde suite exacte de longueur quelconque :
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon

24 Modules sur un anneau commutatif : Généralités.
Définition 1.12Soit (fn : Mn −→ Mn+1)n∈N une famille de morphismes de A-modules.
1. On dit que la suite... // Mn−1
fn−1 // Mnfn // Mn+1
// ...
est exacte en Mn lorsque Im(fn−1) = ker(fn).2. On dit que la suite
... // Mn−1fn−1 // Mn
fn // Mn+1// ...
est exacte lorsqu’elle est exacte en Mn pour tout n.
Proposition 1.111. Dire que M
α // N // 0 est une suite exacte de module revient à dire que α estun morphisme de modules surjectif.
2. Dire que 0 // Mβ // N est une suite exacte de module revient à dire que β est
un morphisme de modules injectif.3. Si un module M apparaît dans une suite exacte 0 −→ M −→ 0 alors le module M
est nul.4. Dire que 0 // M
γ // N // 0 est une suite exacte revient à dire que γ est unisomorphisme.
Démonstration : C’est immédiat.
Lemme 1.4Soit 0 // A
α // Bβ // C // 0 une suite exacte (courte) de A-modules. Les assertions
suivantes sont équivalentes :(i) Le sous-module α(A) est facteur direct de B.
(ii) Il existe un sous-module F ⊂ B tel que la restriction de β à F soit un isomorphismeF ∼= C.
(iii) Il existe un morphisme a : B −→ A tel que a ◦ α = IdA.(iv) Il existe un morphisme b : C −→ B tel que β ◦ b = IdC .Lorsque ces conditions sont vérifiées, le morphisme b 7→ (a(b), β(b)) est un isomorphismeB ∼= A⊕ C.
Démonstration. Pour établir cette équivalence on montre successivement les implications(i) =⇒ (ii) =⇒ (iv) =⇒ (iii) =⇒ (i).On montre (i) =⇒ (ii). Si α(A) est facteur direct soit F un supplémentaire à α(A) dansB. Par définition des suites exactes ker β = α(A) et on a donc ker β ∩ F = {0}. Si c ∈ Cil existe un b ∈ B tel que β(b) = c. Or B est somme de F et α(A). Il existe donc f ∈ Fet a ∈ ker(β) tel que b = f + a. On a donc β(f) = β(b) = c. La restriction de β ausous-module F est bien un isomorphisme.On montre (ii) =⇒ (iv). Soit F tel que β : F −→ C soit un isomorphisme, soit γ : C −→ Fle morphisme réciproque et soit ε : F −→ B le morphisme donné par l’inclusion. Alorsb = ε ◦ γ vérifie bien β ◦ b = IdC .On montre (iv) =⇒ (iii). Puisque α est injective il existe toujours un isomorphismeréciproque η : α(A) −→ A. Pour x ∈ b, on pose p(x) = x − b ◦ β(x). On définit ainsiun morphisme p : B −→ B. Alors comme α(A) = ker(β) la restriction de p à α(A) est
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon

25Chapitre 1. Suites exactes, torsion.
l’identité. Si x ∈ B alors β(p(x)) = β(x)− β ◦ b ◦ β(x) = 0 car β ◦ b = IdC . Donc l’imagede p est contenu dans α(A). Le morphisme a = η ◦ p vérifie bien a ◦ α = IdA.On montre (iii) =⇒ (i). Pour ce, on vérifie que ker a est un supplémentaire de α(A) dansB. Soit x ∈ ker a∩α(A). Alors il existe y ∈ A tel que x = α(y). Et comme a ◦α = IdA, ona 0 = a(x) = a(α(y)) = y. Il suit x = α(y) = 0. On a bien α(A) ∩ ker a = {0}. Soit x ∈ B.Alors a(x−α(a(x))) = a(x)−a(α(a(x))) = 0 puisque a◦α = IdA. Donc x−α(a(x)) ∈ ker a.Donc, comme α(a(x)) appartient à α(A), l’élément x appartient à 〈α(A) ∪ ker a〉.On a démontré les équivalences requises. Si ces conditions sont remplies, l’application b 7→(a(b), β(b)) est clairement linéaire, et son morphisme réciproque est (x, y) 7→ α(x) + b(y),comme on le voit par un calcul immédiat.
Définition 1.13Lorsque les conditions équivalentes du lemme 1.4 sont vérifiées on dit que la suite exacte
0 // Aα // B
β // C // 0 est scindée, on dit que a est une section de α, et on ditque b est une section de β.
Remarques
1. Lorsque A est un corps tous les sous-espaces vectoriels sont facteurs directset toutes les suites courtes sont scindées. Il est alors préférable d’utiliser lanotion de somme directe plus facile à manier et il serait ridicule de parlerde suites exactes d’espaces vectoriels. Bien entendu pour les modules il existedes suites qui ne sont pas scindées, par exemple la suite exacte de Z-modules
0 // Z/pZ x7→px // Z/p2Z x7→x // Z/pZ // 0 n’est pas scindée (voir exercice 22).
2. Soit ... // Mf // N une suite exacte ne terminant pas par 0. Alors la suite
... // Mf // N
πf(M) // N/f(M) // 0 est une suite exacte terminant par 0.
3. Soit Ng // M // ... une suite exacte ne commençant pas par 0. Alors la suite
0 // ker g // Ng // M // ... est une suite exacte qui commence par 0.
4. Soit ... // A // Bf // C // ... une suite exacte avec plus de trois modules
non nuls. Alors on peut la (( couper )) pour obtenir une suite exacte à trois ter-mes non nuls (dite suite exacte courte) et les deux suites moins longues qui suivent :
... // A // ker f // 0
0 // ker f // Bf // Im f // 0
0 // Im(f) // C // ...
5. On peut conclure des remarques 2, 3 et 4 ci-dessus que l’étude des suites exactesse ramène à celle des suites exactes courtes c’est-à-dire aux modules quotients.Cependant il est plus commode et élégant lorsque c’est possible de ne considérerqu’une seule suite longue plutôt que de multiplier les suites courtes.
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon

26 Modules sur un anneau commutatif : Généralités.
4! Définition 1.14Soit M un A-module, soit m ∈ M et soit S un sous-ensemble de M . On dit que m est
1. de torsion si il existe λ ∈ A non nul et ne divisant pas 0 tel que λm = 0.2. divisible si pour tout µ ∈ A il existe y ∈ M tel que m = µy.3. indivisible lorsque les seuls y ∈ M et µ ∈ A vérifiant m = µy sont les µ ∈ A× et
y = µ−1m.4. On note TA(M) ou T (M) l’ensemble des éléments de torsion de M .5. On note AnnA(S) ou Ann(S) l’ensemble des éléments λ de A tels que ∀s ∈ S λs = 0.6. On dit que M est de torsion si TA(M) = M .7. On dit que M est sans torsion si TA(M) = {0}.
Remarques La terminologie classique peut ici prêter à confusion. Être indivisible n’estpas le contraire d’être divisible. Par exemple dans le Z-module libre de rang 1 seuls 1 et −1sont indivisible (en effet on a toujours x = x 1, et x est soit inversible soit non indivisibledans Z). Pourtant aucun élément de Z n’est divisible car pour tout x ∈ Z il existe n ∈ Ntel que x/2n 6∈ Z.Proposition 1.12 Soit M un A-module et S ⊂ M . Si A est commutatif alors
1. TA(M) est un sous-module de M . On dit que TA(M) est le sous-module de torsionde M .
2. AnnA(S) est un idéal de A. On dit que AnnA(S) est l’annulateur du sous-moduleengendré par S.
Démonstration1. 0 ∈ TA(M) car 1 0 = 0. Soit x, y ∈ TA(M) et soit λ, µ ∈ A non nul et ne divisant
pas 0 tels que λx = µy = 0. Alors λµ est non nul et ne divise pas 0. De plus pourtout α, β ∈ A on a λµ(αx− βy) = µαλx− λβµy = 0 puisque A est commutatif. Ona donc bien (αx− βy) ∈ TA(M).
2. voir l’exercice 15
Remarque Les modules libres sont sans torsion. Autrement dit un module dont la torsionest non triviale, comme par exemple le Z-module de torsion Z/15Z n’est pas libre. Le sous-module de torsion est donc une obstruction à la liberté d’un module. On verra que pourles modules de type fini sur les anneaux principaux il suffit de lever cette obstruction : unmodule de type fini sur un anneau principal est libre si et seulement si il est sans torsion.Dès lors que la torsion est identifiée comme une obstruction, il peut être utile de se ramenerà des modules sans torsion. La méthode algébrique usuelle pour ce faire est de passer auquotient :Proposition 1.13 Soit M un A-module. Alors le A-module M/TA(M) est sans torsion.Démonstration. Soit x ∈ M/TA(M) de torsion, et soit λ ∈ A non nul et ne divisant paszéro tel que λx = 0. Prenons y ∈ M relevant x (c’est-à-dire tel que πTA(M)(y) = x). AlorsπTA(M)(λy) = λx = 0 et donc λy ∈ TA(M). Il existe donc un µ non nul et ne divisant pas0 dans A tel que µλy = 0. Donc y est de torsion et x = πTA(M)(y) = 0.
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon
27Chapitre 2.
Chapitre 2
Classification des modules detype fini sur les anneauxprincipaux
Dans toute la suite A désigne un anneau commutatif unitaire intègre et principal.
2.1 Présentation matricielle des modules de type fini
Définition 2.1Soit M un A-module. On dit que M est de type fini lorsqu’il existe une partie fini F ⊂ Mtelle que M = 〈F 〉.
Lemme 2.1Soit n un entier, L ∼= An un module libre de rang n et N ⊂ An un sous-module. Alors Nest libre de rang inférieur ou égal à n.
Démonstration : On procède par récurrence sur n. Si n = 1 les sous-modules de A sontles idéaux de A qu’on a supposé principal. Un idéal de A est ou bien réduit à 0 c’est-à direlibre de rang 0 ou bien de la forme Aα pour α 6= 0 c’est-à-dire libre de rang 1, et le lemmeest vrai pour n = 1. Soit k un entier quelconque et supposons le lemme pour n = k − 1.Soit N un sous-module de Ak. Soit pk : Ak −→ A la projection sur la dernière coordonnée.Alors pk est surjective et son noyau est libre de rang n− 1. Si N ⊂ ker pk alors N est librepar récurrence. Sinon pk(N) est un sous-module non nul de A et il existe α ∈ A tel quepk(N) = Aα. Soit x ∈ N tel que pk(x) = α. Par récurrence N ∩ ker pk est libre de rang auplus (n− 1). Le produit direct externe Ax⊕ (N ∩ ker pk) est donc libre de rang au plus k.Pour conclure on vérifie donc que N = (N ∩ ker pk)⊕Ax. Soit y ∈ N alors il existe λ ∈ Atel que pk(y) = λα = pk(λx). Donc y − λx ∈ ker pk et on a bien N = (ker pk ∩ N) + Ax.Soit y ∈ N ∩ ker pk ∩ Ax = ker pk ∩ Ax. Alors y ∈ Ax donc il existe λ ∈ A tel que y = λxet y ∈ ker pk on a donc 0 = pk(y) = pk(λx) = λα. Puisque α 6= 0 et A est intègre on endéduit λ = 0 puis y = λx = 0, ce qui termine la preuve.Soit M un A-module de type fini et soit F ⊂ M un système générateur fini de M . Alorsϕ : (af )f∈F 7→ ∑
f aff est un morphisme surjectif du module libre AF dans M , et par
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon
28 Classification des modules de type fini sur les anneaux principaux
factorisation M est isomorphe au quotient AF / ker ϕ. En conséquence du point de vue dela structure de module la connaissance des modules de type fini admettant n générateurséquivaut à celle des sous-modules de An (qui sont aussi de type fini par le lemme 2.1).Définition 2.2Soit f un entier et M un module de type fini admettant un système de générateursx1, . . . , xf . Soit (εi)
i=fi=1 la base canonique de Af et soit ϕ : Af −→ M le morphisme surjectif
défini par linéarité avec ϕ(εi) = xi. On appelle sous-module des relations entre les xi et onnote R le noyau R = ker ϕ. La donnée d’un système générateur fini r1, . . . rs de R, s’appelleune présentation du module M par générateurs et relations (auquel cas on appelle parfoisles ri (( relations élémentaires ))).
Par définition un élément (ai)i=fi=1 de R correspond à une relation de dépendance linéaire∑
i aixi = 0, d’où la terminologie. D’après le lemme 2.1 on peut présenter M à l’aide d’auplus f relations élémentaires. En complétant, si besoin est, ces relations élémentaires avecdes vecteurs nuls on obtient ainsi f vecteurs r1, . . . , rf du module libre Af . En écrivantces vecteurs en colonne rj =
∑i=fi=1 ri,jεi on obtient une matrice R = [ri,j] ∈ Mf (A) qui
est la matrice dans la base εi du morphisme ρ : Af −→ Af défini par linéarité en posantρ(εi) = ri. Bien entendu l’image de ρ est R = ρ(Af ).Définition 2.3La matrice R ainsi obtenu s’appelle la matrice des relations du module M .
Lemme 2.2On conserve les notations f, M, ρ, R et ri qui précédent. Soit g, h deux isomorphismes deAf . Alors M ∼= Af/R ∼= Af/g ◦ ρ ◦ h(Af ).
Démonstration : Comme on est parti d’une présentation du module M l’isomorphieM ∼= Af/R est claire. Puisque h est un isomorphisme on a ρ◦h(Af ) = ρ(Af ) = R. On vérifiel’isomorphie Af/R ∼= Af/g(R). Soit πg(R) le passage au quotient πg(R) : Af −→ Af/g(R)et soit ψ le morphisme composé surjectif ψ = πg(R) ◦ g. Pour x ∈ Af on a les équivalencesx ∈ ker ψ ⇐⇒ g(x) ∈ ker πg(R) ⇐⇒ g(x) ∈ g(R) ⇐⇒ x ∈ R puisque g est unisomorphisme. Autrement dit ker ψ = R et par factorisation on obtient Af/R ∼= Af/g(R).
2.2 le théorème de la base adaptée : énoncé de résultats
Soit M un A-module engendré par f générateurs x1, . . . , xf et soit R ∈ Mf (A) la matricedes relations de M . Le lemme 2.2 montre qu’on peut sans changer la classe d’isomorphie dumodule M multiplier à gauche et à droite la matrice R par les matrices G et H de GLf (A)1
correspondant dans la base εi aux isomorphismes g et h. Pour en tirer des conséquencesen termes de modules il suffit donc de choisir les matrices G et H de sorte que D = GRHsoit le plus simple possible.Définition 2.4 Deux matricesM et N dans Mf (A) sont dites équivalentes lorsqu’il existeG, H ∈ GLf (A) telles que M = GNH. On note M ∼ N la relation d’équivalence ainsidéfinie.
1GLf (A) désigne le sous-ensemble des matrices inversibles correspondant aux endomorphismes bijectifsde Af . Le déterminant de ces matrices appartient à A× (et M est inversible si et seulement si det M ∈ A×)
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon

29Chapitre 2. le théorème de la base adaptée: énoncé de résultats
Pour démontrer le théorème de la base adaptée qui est le résultat principal de ce cours,on admet provisoirement le lemme d’algèbre linéaire suivant qui donne un représentantsimple des classes d’équivalences de matrices.
Lemme 2.3Soit f un entier et soitR une matrice de Mf (A). Il existe des matrices G etH dans GLf (A)et une suite d1 | d2 | . . . | df d’éléments de A ordonnée par divisibilité (les derniers dj étantéventuellement nul) tels que GRH soit la matrice diagonale D dont le ième coefficientdiagonal est di. Soit D′ une autre matrice diagonale de Mf (A) équivalente à R dont lestermes diagonals (d′i) sont ordonnés par divisibilité. Alors pour tout i les idéaux principaux(di) et (d′i) sont égaux. En d’autre termes les idéaux emboîtés (df ) ⊂ (df−1) ⊂ . . . ⊂ (d1)fournissent un système complet d’invariants des classes d’équivalences de matrices deMf (A).
On démontrera ce lemme dans les sections qui suivent. Pour le cas particulier des anneauxeuclidien on donnera l’algorithme de Smith pour calculer D. Cela repose sur des opérationsélémentaires dans le style de l’algorithme du pivot de Gauss, mais sans divisions.
Théorème 2.1 base adaptéeSoit R un sous-module de Af . Alors il existe une suite finie d1 | d2 | . . . df d’éléments de Aordonnée par divisibilité et une base e1, . . . ef de Af telle que
R =
i=f⊕i=1
Adiei .
Démonstration : Soit r1, . . . , rf un système générateur (éventuellement complété par desvecteurs nuls) à f éléments de R, dont l’existence est assurée par le lemme 2.1. Soit ε1, . . . εf
la base canonique de Af . On forme la matrice R de l’application linéaire ρ : Af −→ Af
définie par linéarité avec ρ(εi) = ri. Bien entendu R = ρ(Af ) et l’étude de R se ramène àcelle de R. Soient d1 | . . . | df les éléments de A et D, G, et H les matrices du lemme 2.3.Alors D est la matrice diagonale dont le ième coefficient diagonal est di et GRH = D. Onnote δ (resp. g, h) les endomorphismes de Af représentés dans la base εi par les matricesD (resp. G, H). On a δ = g ◦ ρ ◦ h et donc pour tout i diεi = g(ρ(h(εi))). Comme g estun isomorphisme la famille ei = g−1(εi) est une base de Af . Comme les ei sont libre lasomme
∑Adiei est directe (éventuellement les derniers di sont nuls : on n’impose pas à R
d’être de rang maximal). Il suffit donc de montrer que le système diei engendre R. MaisR = ρ(Af ) = ρ(h(Af )) = g−1δ(Af ). Donc R est engendré par les g−1(δ(εi)) = diei.
Remarque Cette démonstration fournit aussi une méthode pour calculer la base adaptéeà un sous-module de Af . On verra en effet dans la section qui suit comment calculer lesmatrices D et G qui précèdent. On obtient alors les coordonnées dans la base de départ εi
des vecteurs ei de la base adaptée en inversant la matrice G, puisque ei = g−1(εi).Définition 2.5 Soit R ( Af . Une base e1, . . . , ef de Af comme dans le théorème 2.1s’appelle une base de Af adaptée au sous-module R. Il existe un rang j à partir duquel lesdj du théorème 2.1 ne sont plus inversibles. On appelle diviseurs élémentaires du modulequotient M = Af/R la suite dj | dj+1 | . . . | df .
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon

30 Classification des modules de type fini sur les anneaux principaux
Corollaire 2.1.1Soit M un A-module de type fini. Soit q1 | q2 | . . . | qf la suite des diviseurs élémentaires(non inversibles) de M , et soit 1 ≤ s ≤ f + 1 tel que les qi soient non nuls pour tout i < set qs = 0 (on pose s = f + 1 si qf 6= 0).
1. M est isomorphe à la somme directe
M ∼=i=f⊕i=1
A/qiA
2. Il existe un module libre L ⊂ M de rang f − s + 1 tel que M = T (M)⊕ L.3. Le sous-module de torsion de M est isomorphe à la somme directe
T (M) ∼=i=s−1⊕i=1
A/qiA
4. s = 1 ⇐⇒ T (M) = 0 ⇐⇒ M est libre.
Démonstration : puisque M est de type fini on part d’un système générateur m1, . . . , mn
de M et on se donne un système r1, . . . , rn de relations élémentaires entre les mi. Onapplique le théorème de la base adaptée 2.1 au sous-module R ⊂ An engendré par les ri.On obtient donc
M ∼= An
R∼=
⊕i=ni=1 Aei⊕i=n
i=1 Adiei
∼=i=n⊕i=1
A
diA
Si d1 est inversible le facteur A/d1A = 0 est redondant et en supprimant les di inversibleson obtient la suite des diviseurs élémentaires (qi)
i=fi=1 de M et l’isomorphisme du 1-. Pour
j ≥ s les qj sont nuls et le facteur direct ⊕s≤j≤fA/qjA ∼= Af−s+1 est libre. ClairementT (⊕1≤j≤fA/qjA) = ⊕1≤j<sA/qjA, ce qui donne 2- et 3- et la première équivalence du 4-.L’implication L libre implique T (M) = 0 est évidente. L’implication réciproque provientdu 2-.
4! Théorème 2.2Soit M et N deux A-modules et soit m1, . . . , ms les diviseurs élémentaires de M et n1, . . . , nt
les diviseurs élémentaires de N . On suppose M ∼= N . Alors s = t et pour tout i l’idéal(mi) est égal à l’idéal (ni).
Démonstration : Quite à échanger M et N on peut supposer s ≥ t. On rajoute sinécessaire des 1 au début de la suite des ni, et on peut ainsi supposer s = t : a posteriorion aura (n1) = (m1) 6= A de sorte que l’égalité s = t était vrai sans ajout. En partant del’isomorphisme M ∼= N on obtient un isomorphisme T (M) ∼= T (N) et par factorisationM/T (M) ∼= N/T (N). Par le corollaire 2.1.1 M/T (M) et N/T (N) sont libres. Ils sontisomorphes donc de même rangs : il y a autant de mi = 0 que de ni = 0 et avecl’isomorphisme T (M) ∼= T (N) on est ramené au cas particulier M et N de torsion ets = t. Pour montrer l’égalité des idéaux (mi) = (ni) on montre que pour tout irréductibleπ de A et tout entier n, on a équivalence entre πn | mi et πn | ni. On énonce d’abord unlemme utile.
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon

31Chapitre 2. le théorème de la base adaptée: énoncé de résultats
Lemme 2.4Soit π un irréductible de A, n un entier et d ∈ A non nul. Alors
πn(A/dA)
πn+1(A/dA)est un espace
vectoriel sur le corps A/πA de dimension 1 si πn+1 divise d et de dimension 0 sinon.
Démonstration du lemme On écrit d = πjd′ avec d′ non divisible par π. Par le lemme
Chinois on a A/dA ∼= A/πjA ⊕ A/d′A et on en déduitπn(A/dA)
πn+1(A/dA)∼= πn(A/πjA)
πn+1(A/πjA)⊕
πn(A/d′A)
πn+1(A/d′A). Puisque π - d′ on sait avec une relation de Bezout inverser π modulo d′ et
pour tout k on a πk(A/d′A) = A/d′A d’oùπn(A/d′A)
πn+1(A/d′A)= 0. On peut donc supposer d′ = 1.
Montrons que si j > n alorsπn(A/πjA)
πn+1(A/πjA)∼= A/πA. On considère le morphisme surjectif
θ : A −→ πn(A/πjA)
πn+1(A/πjA)défini par θ(a) = πna. Soit a ∈ ker θ. Alors πna ∈ πn+1(A/πjA) et
donc il existe b, c ∈ A tels que πna = πn+1b + πjc. Puisque j > n on simplifie par πn et ilvient a = π(b+πj−n−1c) ∈ πA. D’où l’égalité ker θ = πA l’inclusion réciproque étant claire.
Par factorisation on conclutπn(A/πjA)
πn+1(A/πjA)∼= A/πA. Si j ≤ n alors
πn(A/πjA)
πn+1(A/πjA)= 0,
puisque πn = 0 dans A/πjA. Cela termine la preuve du lemme.On reprend la démonstration du théorème. Soit f : M −→ N l’isomorphisme dont on asupposé l’existence. Par linéarité de f on obtient pour tout π ∈ A et tout n ∈ N l’égalitéf(πnM) = πnN et l’isomorphie πnM ∼= πnN . En conséquence on a pour tout irréductibleπ et tout n ∈ N isomorphie entre πnM/πn+1M et πnN/πn+1N . Ces deux quotients sont desespaces vectoriels sur A/πA, la dimension du premier est égale au nombre de mi divisiblepar πn+1 la dimension du second est le nombre de ni divisible par πn+1. Comme les mi etles ni sont ordonnés par divisibilité on obtient bien pour tout i, k ∈ N et tout irréductibleπ l’équivalence πk | mi ⇐⇒ πk | ni. Cela termine la preuve du théorème.Proposition 2.1Soit G un groupe abélien de type fini, alors il existe une suite d’entiers d1 | . . . | ds positifsou nul et distincts de 1 tels que G ∼= ⊕iZ/di. La suite des di s’appelle la suite des diviseursélémentaires de G. Deux groupe abéliens sont isomorphes si et seulement si ils ont mêmesuite de diviseurs élémentaires.
Démonstration : On considère G comme un Z-module et on applique les théorèmes 2.2et le corollaire 2.1.1. Puisqu’on a pris soin de prendre des diviseurs élémentaires positifson peut remplacer l’égalité entre les idéaux engendrés par ces diviseurs par l’égalité entreces diviseurs eux-mêmes.
Il reste à démontrer le lemme 2.3, c’est-à-dire étudier à équivalence près les matrices àcoefficients dans un anneau principal. Cette démonstration fait l’objet des trois dernièressections de ce cours. La section qui suit décrit des transformations que l’ont peut fairesubir à une matrice sans changer sa classe d’équivalence. Puis on donne une démonstrationalgorithmique du lemme 2.3 lorsque l’anneau est euclidien. En dernière section on décritcomment modifier la preuve euclidienne dans le cas plus général des anneaux principaux.
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon

32 Classification des modules de type fini sur les anneaux principaux
2.3 Opérations élémentaires sur les matrices
Soit M une matrice dans Mf (A). On numérote L1, . . . , Lf ∈ Af les vecteurs lignes de Met C1, . . . , Cf les vecteurs colonnes de M . On décrit une liste d’opérations élémentairessur ces vecteurs lignes (respectivement colonnes) de M . Il s’agit de modifications que l’onpeut apporter à ces vecteurs sans changer la classe d’équivalence de M . En un sens quel’on ne précisera pas dans ce cours, lorsque l’anneau A est euclidien, ce sont les seulesopérations avec cette propriété. Effectuer une opération sur les lignes de M revient àmultiplier à gauche M par une matrice élémentaire E ∈ GLf (A). Effectuer une opérationsur les colonnes de M revient à multiplier à droite M par une matrice élémentaire.
Définition 2.6
1. Soit λ ∈ A et k, l ∈ {1, . . . , f} tels que l 6= k. On note Ek,l(λ) = [ei,j] la matrice dontles coefficients sont
ei,j =
1 si i = jλ si i = k et j = l0 sinon
2. Soit k, l ∈ {1, . . . , f} tels que l 6= k. On note Sk,l = [si,j] la matrice dont lescoefficients sont
si,j =
1 si i = j, i 6= k et i 6= l0 si i = j = k ou i = j = l1 si {i, j} = {k, l}0 sinon
Les matrices ci-dessus s’appellent des matrices élémentaires. Examinons l’effet sur les lignes(respectivement les colonnes) de la multiplication par ces matrices :
Proposition 2.2
Ek,l(λ)
L1...
Lk...Ll...
Lf
=
L1...
Lk + λLl...Ll...
Lf
Démonstration C’est immédiat.
Proposition 2.3
[C1, . . . , Ck, . . . , Cl, . . . Cf ]Ek,l(λ) = [C1, . . . , Ck, . . . , Cl + λCk, . . . , Cf ].
Démonstration C’est immédiat.
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon

33Chapitre 2. Opérations élémentaires sur les matrices
Proposition 2.4
Sk,l
L1...
Lk...Ll...
Lf
=
L1...Ll...
Lk...
Lf
.
Démonstration C’est immédiat.Proposition 2.5
[C1, . . . , Ck, . . . , Cl, . . . , Cf ]Sk,l = [C1, . . . , Cl, . . . , Ck, . . . , Cf ]
Démonstration C’est immédiat.Lorsqu’on multiplie une matrice M à gauche par la matrice Ek,l(λ) on laisse toutes leslignes de de M inchangées sauf la k-ième ligne qui est remplacée par Lk + λLl. Lorsqu’onmultiplie à droite une matrice M par la matrice Ek,l(λ) on laisse toute les colonnes deM inchangées sauf la l-ième qui est remplacée par Cl + λCk. Multiplier une matrice M àgauche par la matrice Sk,l échange les k-ième et l-ième lignes de M . Multiplier à droite unematrice M par la matrice Sk,l échange les k-ième et l-ième lignes de M . Ces opérations(dites opérations élémentaires sur les lignes et colonnes de M) ne changent donc pas laclasse d’équivalence de M . Dans le cas particulier des anneaux euclidiens elles suffisentpour démontrer le lemme 2.3.
Exemple Pour bien comprendre comment utiliser ces transformations élémentaire on vavoir comment réduire la matrice
M =
3 2 −3 32 2 −2 210 0 0 108 −2 2 8
Les opérations effectuées sur les colonnes sont indiquées au fur et à mesure. La dernièrecolonne contenant des polynômes en X,Y, Z et T permet conserver les opérations effectuéessur les lignes. C’est une notation commode pour retrouver la la matrice G de la remarquequi suit le théorème de la base adaptée (théorème 2.1).
3 2 −3 3 X2 2 −2 2 Y10 0 0 10 Z8 −2 2 8 T
C3 ← C3 + C1
C4 ← C4 − C1
∼
3 2 0 0 X2 2 0 0 Y10 0 10 0 Z8 −2 10 0 T
On a commencé par faire apparaître les plus de zéros possible en utilisant des opérationssur les colonnes. A ce stade le p.g.c.d. des coefficients de la matrice est 1. On peut le faire
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon

34 Classification des modules de type fini sur les anneaux principaux
apparaître en position de pivot (première ligne, première colonne) en enlevant la deuxièmecolonne à la première.
3 2 0 0 X2 2 0 0 Y10 0 10 0 Z8 −2 10 0 T
C1 ← C1 − C2
∼
1 2 0 0 X0 2 0 0 Y10 0 10 0 Z10 −2 10 0 T
Puisque on a un 1 en position de pivot (un diviseur commun à tous les coefficients de lamatrice) on peut l’utiliser pour faire apparaître des 0 sur la première ligne et la premièrecolonne avec les opérations élémentaires ad hoc. Ce principe théorique montre que cetteméthode de calcul aboutit toujours à une matrice diagonale. En pratique si on veut obtenirensuite une base adaptée il est préférable de toujours faire le plus possible d’opérationssur les colonnes. Ici par exemple on peut simplifier la première colonne sans opérer sur leslignes.
1 2 0 0 X0 2 0 0 Y10 0 10 0 Z10 −2 10 0 T
C1 ← C1 − C3
∼
1 2 0 0 X0 2 0 0 Y0 0 10 0 Z0 −2 10 0 T
Maintenant que la première colonne est (( nettoyée )) on peut annuler tous les coefficientsde la première ligne.
1 2 0 0 X0 2 0 0 Y0 0 10 0 Z0 −2 10 0 T
C2 ← C2 − 2C1
∼
1 0 0 0 X0 2 0 0 Y0 0 10 0 Z0 −2 10 0 T
A ce stade on va laisser telles quelles la première ligne et la première colonne et travaillersur la sous-matrice d’ordre 3 qui reste. Grâce aux zéros sur la première ligne (resp. colonne)les opérations élémentaire sur les lignes (resp. les colonnes) de la sous-matrice n’affectentpas la première colonne (resp. ligne). Ainsi par récurrence sur la dimension on peut rendretoute matrice semblable à une matrice diagonale, pour peu que l’on puisse faire apparaîtreun p.g.c.d. des coefficients de la matrice à réduire. On verra que c’est toujours possible :c’est l’idée de la preuve de la section qui suit. Dans l’exemple à traiter maintenant unp.g.c.d. des coefficient de la sous-matrice est 2 et il se trouve déjà en position de pivot. Ontermine la réduction avec deux opérations sur les lignes.
1 0 0 0 X0 2 0 0 Y0 0 10 0 Z0 −2 10 0 T
∼1 0 0 0 X0 2 0 0 Y0 0 10 0 Z0 0 0 0 Y − Z + T
La matrice G correspondant aux opérations effectuées sur les lignes et son inverse sont :
G =
1 0 0 00 1 0 00 0 1 00 1 −1 1
G−1 =
1 0 0 00 1 0 00 0 1 00 −1 1 1
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon

35Chapitre 2. Équivalences de matrices : l’algorithme de Smith
Soit R le sous-Z-module de Z4 engendré par les vecteurs colonnes de M . Une base adaptéeà R est donc la base e1 = (1, 0, 0, 0); e2 = (0, 1, 0,−1); e3 = (0, 0, 1, 1); e4 = (0, 0, 0, 1). Lecalcul de l’inverse de cette matrice G est très facile car j’ai pris soin de faire le plus possibled’opérations sur les colonnes (et donc moins d’opérations sur les lignes). Le module Z4/Rest isomorphe à Z/2⊕Z/10⊕Z. Évidemment il existe plusieurs “bases adaptées” à R, seulela suite canonique des idéaux emboîtés Z ⊃ 2Z ⊃ 10Z ⊃ {0} est unique. Si vous réduisezla matrice suivant un autre chemin, vous devez parvenir à la même suite ±1 | ±2 | ±10 | 0,mais en principe à une autre base adaptée (avec plus de calculs). Après avoir trouvé unebase adaptée (dans l’ordre) e1; · · · ; en à un sous-module R de Zn il est recommandé devérifier au moins que les diei (dans le même ordre) appartiennent à R. Cette vérificationest peu coûteuse en terme de calcul et permet de détecter presque toutes les erreurs. Si l’onveut être sur du résultat il faudrait en outre vérifier que le déterminant des coefficients desei est inversible et que les diei engendrent R. On va se contenter de détailler la premièrevérification. Notons r1 = (3, 2, 10, 8); r2 = (2, 2, 0,−2); r3 = (−3,−2, 0, 2) et r4 = r1 lesgénérateurs initiaux de R. Ici on obtient si nécessaire après résolutions des quatres systèmeslinéaires (dont les inconnus sont x, y, z et t) diei = xr1 + yr2 + zr3 + tr4 la vérification :
1e1 = −r2 − r3 ∈ R
2e2 = 3r2 + 2r3 ∈ R
10e3 = r1 + r3 ∈ R
0e4 = 0 ∈ R
2.4 Équivalences de matrices : l’algorithme de Smith
Le but de cette section est de démontrer le lemme 2.3 et calculer en pratique les matrices Get D de ce lemme dans le cas particulier des anneaux euclidiens (par exemple Z ou K[X]).On appelle algorithme de Smith cette méthode de calcul. On suppose donc l’anneau Aeuclidien et on note ϕ un stathme euclidien2 sur A. Pour A = Z on peut prendre ϕ(x) = |x|et pour A = K[X] on peut prendre le degré des polynômes.
Lemme 2.5Soit M = [mi,j] ∈ Mf (A). Alors M est équivalente à une matrice A = [ai,j] telle que :
1. ∀i, a1,i = ai,1 = 0
2. ∀i, ∀j, d | ai,j
3. d = a1,1 est un p.g.c.d. des coefficients de M .
M ∼
d 0 . . . 00... da′i,j0
2Par définition un stathme euclidien sur un anneau A est une application ϕ : A− {0} −→ N telle que :(i) Pour tout a ∈ A et tout b ∈ A, b 6= 0 il existe q, r ∈ A tels que a = bq + r avec r = 0 ou ϕ(r) < ϕ(b).(ii) Pour tout a, b ∈ A − {0}, ϕ(ab) ≥ ϕ(a). Un anneau A est euclidien si et seulement de tels stathmessur A existent.
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon

36 Classification des modules de type fini sur les anneaux principaux
Démonstration Soit γ : Mf (A) −→ N l’application définie par
γ([αi,j]) = Min{ϕ(αi,j), 1 ≤ i ≤ f, 1 ≤ j ≤ f}.Le principe de la démonstration est d’utiliser les opérations élémentaires pour construireune suite de matrices équivalentes M = M0, M1, . . . Mk = A. A chaque étape on diminuel’entier positif γ(Mi) et on démontre que l’une des deux possibilités suivante a lieu : oubien Mi = A est de la forme voulue, ou bien il existe une matrice Mi+1 équivalente à Mi
telle que γ(Mi+1) < γ(Mi). La suite d’entiers positifs γ(Mi) doit cesser de décroître, et celase produit au rang k tel que Mk = A. Soit α = mi,j le coefficient tel que γ(M) = ϕ(mi,j).En permutant la première et la i-ième ligne puis la première et la j-ième colonne on peutsupposer α = mi,j = m1,1. Supposons qu’il existe un indice l tel que α - m1,l. Alors pardivision euclidienne il existe q, r ∈ A tels que ϕ(r) < ϕ(α) et r = m1,l − qα. Pour obtenirune matrice M ′ équivalente à M et telle que γ(M ′) < γ(M) il suffit alors de remplacer lal-ième ligne par Ll − qL1 c’est-à-dire multiplier M à gauche par El,1(−q).
M =
α . . . mi,1 . . .... ∗
m1,l . . . mi,l . . .... ∗
m1,f . . .
∼
α . . . mi,1 . . .... ∗
m1,l − qα = r . . . mi,l − qmi,1 . . .... ∗
m1,f . . .
= M ′.
Le coefficient r apparaît alors dans la première colonne et l-ième ligne de M ′ = El,1(−q)M ,et on a donc γ(M ′) ≤ ϕ(r) < ϕ(α) = γ(M).Au bout d’un nombre fini d’étape le coefficient α de stathme minimal, placé en position depivot (première ligne, première colonne) divisera tout les m1,l. En raisonnant de même surles colonnes α divisera tous les mk,1. En remplaçant la k-ième colonne par Ck− (mk,1/α)C1
on annule le coefficient mk,1 pour k = 2, . . . , f ; et en remplaçant la l-ième ligne parLl − (m1,l/α)Ll on annule le coefficient m1,l pour l = 2, . . . , f . On obtient ainsi unematrice M2 équivalente à M de la forme :
M2 =
α 0 . . . 00... mi,j
0
.
Avec ϕ(α) = γ(M2). A ce stade ou bien le coefficient pivot α de stathme minimal divisetout les mi,j et on a bien une matrice M2 = A de la forme voulue, ou bien il existe mk,l aveck > 1 et l > 1 et α - mk,l. Mais dans le deuxième cas en remplaçant la première colonnepar C1 +Cl on retrouve le même pivot α (en effet le coefficient m1,l est nul) et le coefficientmk,l sur la première colonne (en effet le coefficient mk,1 est nul) avec m1,1 - mk,l. On seretrouve ainsi alors dans la situation du début de la preuve ou le coefficient de stathmeminimal ne divise pas un des coefficients sur la première ligne. Par division euclidienne onpeut alors trouver une matrice M3 équivalente à M2 telle que γ(M3) < γ(M2). Au boutd’un nombre fini d’étape on obtient une matrice Mk = A de la forme voulue. Il reste encoreà vérifier que le coefficient α1,1 qui divise tous les coefficient de A est bien un p.g.c.d. ddes coefficients initiaux de M . Clairement α1,1 est un p.g.c.d. des coefficients de A. Pourmontrer que c’est aussi un p.g.c.d. des coefficient initiaux de M on montre que l’idéalengendré par les coefficient d’une matrice est un invariant des classes d’équivalence. C’estle lemme qui suit :
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon
37Chapitre 2. Démonstration du lemme 2.3 pour les anneaux principaux
Lemme 2.6Soit A un anneau principal, soient M et N deux matrices équivalentes dans Mf (A). Alorsle p.g.c.d des coefficient de M est égal au p.g.c.d des coefficients de N .
Démonstration Soit G ∈ GLf (A). Par définition du produit matriciel tous les coefficientsde B = GM appartiennent à l’idéal engendré par les coefficients de M . Réciproquement,tous les coefficient de M = G−1B appartiennent à l’idéal engendré par les coefficientsde B. Cet idéal (principal) ne change pas par multiplication à gauche par un élémentde GLf (A). Le même raisonnement s’applique pour les multiplications à droite par deséléments de GLf (A). Cela conclut la preuve des deux lemmes.
fin de la démonstration du lemme 2.3. Soit R ∈ Mf (A). Le lemme 2.5 et unerécurrence facile sur f fournissent l’existence de la suite d1 | d2 | . . . | df et de matricesG, H ∈ GLf (A) tels que
GRH =
d1 0 . . . . . . 0
0. . . ...
... di...
... . . . 00 . . . . . . 0 df
= D
Pour l’unicité, on suppose l’existence deux matrice diagonale équivalentes D et D′ de laforme
D =
d1 0 . . . . . . 0
0. . . ...
... di...
... . . . 00 . . . . . . 0 df
et D′ =
d′1 0 . . . . . . 0
0. . . ...
... d′i...
... . . . 00 . . . . . . 0 d′f
,
avec d1 | d2 | . . . | df et d′1 | d′2 | . . . | d′f . Alors comme D et D′ sont équivalentes lelemme 2.2 donne l’isomorphie ⊕iA/diA ∼= ⊕iA/d′iA. Le théorème 2.2 donne l’égalité entreles idéaux (di) = (d′i). Le lemme 2.3 est démontré.
2.5 Démonstration du lemme 2.3 pour les anneaux prin-cipaux
Dans cette (ultime) section on indique comment modifier la preuve euclidienne qui précèdedans le cas d’un anneaux principal quelconque. En fait on doit seulement modifier deuxingrédients. On va utiliser une fonction qui joue le rôle du stathme euclidien : c’est lalongueur de la définition 2.7. Et on doit pouvoir faire apparaître un p.g.c.d. de deuxcoefficient de la matrice sans division euclidienne : pour ce on utilise une relation deBezout et une nouvelle opération élémentaire. Dans cette section A est à nouveau unanneau principal quelconque. En particulier A est factoriel. Si p est un irréductible de A eta ∈ A on note vp(a) l’entier tel que pvp(a) divise a et pas pvp(a)+1. Cela définit une application
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon

38 Classification des modules de type fini sur les anneaux principaux
a 7→ vp(a) de A − {0} dans N. On fixe un système de représentant des irréductibles de Anoté ℘. Cela signifie que tout p ∈ ℘ est irréductible, que deux éléments de ℘ sont associéssi et seulement si ils sont égaux et que tout irréductible de A est associé avec un élémentde ℘. En conséquence tout a ∈ A s’écrit de manière unique comme un produit
a = u∏p∈℘
pvp(a),
pour un unique inversible u ∈ A×. En outre pour a fixé les vp(a) sont tous nuls sauf unnombre fini d’entre eux. Cela permet de poser la définition suivante :Définition 2.7Soit a ∈ A non nul. On appelle longueur de A le nombre naturel `(a) =
∑p∈℘ vp(a). On
définit ainsi une application ` : A− {0} −→ N.
Cette fonction ` ne permet pas de faire des divisions euclidienne, cependant ses propriétéssuffisent à notre démonstration.Proposition 2.6Soient a, b ∈ A non nuls.
1. Si a | b strictement alors `(a) < `(b).2. Si a et b sont associés alors `(a) = `(b).3. `(a) = 0 si et seulement si a ∈ A×.
Démonstration C’est évident. La réciproque de 2 est fausse, par exemple les éléments de℘ a priori distincts sont tous de longueur 1.Proposition 2.7Soient a, b deux éléments de A. On note d le p.g.c.d. de a et b. On considère une matriceM dans Mf (A) de la forme
M1 =
a b ∗ . . . ∗∗ ∗ ∗...
... . . .∗ ∗ . . . ∗
ou de la forme M2 =
a ∗ . . . ∗b ∗ . . . ∗∗ ∗... . . . ...∗ . . . ∗
.
Alors M est équivalente à une matrice dont un des coefficient est d.
Démonstration. On part d’une relation de Bezout ua + bv = d. Alors les coefficients uet v sont premiers entre eux et il existe donc u′ et v′ tels que uu′ − vv′ = 1. Les matricesde la forme
∆d =
u v′
v u′0
0 Idf−2
et ∆g =
u vv′ u′
0
0 Idf−2
sont donc dans GLf (A). La matrice M1∆d (respectivement ∆gM2) est alors semblable àM1 (respectivement M2) et admet bien d comme premier coefficient.
Démonstration du lemme 2.3 pour les anneaux principaux. On reprend la preuveeuclidienne du paragraphe précédent. L’hypothèse A euclidien n’est pas utilisée dans le
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon

39Chapitre 2. Démonstration du lemme 2.3 pour les anneaux principaux
paragraphe intitulé fin de la démonstration du lemme 2.3. ni pour le lemme 2.6.Il nous suffit donc de démontrer le lemme 2.5 sans la troisième propriété (qui est uneconséquence du lemme 2.6). Mais pour généraliser la démonstration du lemme 2.5 au casA principal il suffit de remplacer partout le minimum des stathmes des coefficients (noté γ)par le minimum des longueurs des coefficients, et de remplacer les divisions euclidiennes parl’operation déduite de la proposition 2.6. En effet si le pivot a ne divise pas un coefficient bsur sa ligne ou sa colonne on peut par permutation ramener b à la place de la proposition2.6 puis faire apparaître le p.g.c.d. de (a, b) qui divise strictement a. La longueur de d estdonc strictement inférieure à celle de a. Tout le reste de la démonstration du lemme 2.3 sefait comme dans le cas euclidien.
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon
40 Classification des modules de type fini sur les anneaux principaux
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon
Exercices du chapitre 0. 41
Chapitre 3
Exercices du chapitre 0.
3.2 Exercice 1.
Soit f : Z/2Z −→ Z/6Z le seul morphisme de groupes non trivial. Montrer que f vérifieles conditions 1. et 2. de la définition des morphismes d’anneaux mais pas la troisième.
3.3 Exercice 2.
Démontrer la proposition 0.2 : les noyaux et images des morphismes de groupes sont dessous-groupes.
3.4 Exercice 3.
Démontrer la proposition 0.3 : les noyaux des morphismes d’anneaux sont des idéauxbilatères, et les images des morphismes d’anneaux sont des sous-anneaux.
3.5 Exercice 4.
Démontrer que la relation associée à un sous-groupe additif H ⊂ G définie dans laproposition 0.4 est symétrique et reflexive (ce qui complète la démonstration de cetteproposition).
3.6 Exercice 5.
Soient H ⊂ G un sous-groupe d’un groupe additif. Démontrer que la loi de compositioninterne sur le quotient G/H définie dans le théorème 0.1 vérifie les axiomes de la définitionde groupe. Montrer que H = ker πH (ce qui complète la preuve de ce théorème).
3.7 Exercice 6.
Soient A un anneau commutatif et I ⊂ A un idéal de A. Démontrer les équivalences :1. I est premier si et seulement si A/I est intègre.2. I est maximal si et seulement si A/I est un corps.

42 Exercices du chapitre 0.
3.8 Exercice 7.Montrer les implications qui suivent.
1. Si A est un corps alors A est intègre.2. Si A est intègre et fini alors A est un corps.
3.9 Exercice 8.Un élément u de A est dit nilpotent lorsqu’il existe n ∈ N tel que un = 0. On appelle radicalnilpotent ou encore nilradical de A l’ensemble N(A) = {u ∈ A, u est nilpotent}.
1. Montrer que N(A) est un idéal de A.2. Soit u ∈ N(A). Montrer que (1 + u) ∈ A×.
3.10 Exercice 9.Soit K un corps.
1. Soit I et J les sous-ensembles de M2(K) définis ci-dessous.
I :=
{(0 0a b
)| a, b ∈ K
}et J :=
{(a 0b 0
)| a, b ∈ K
}
Montrer que I est un idéal à droite et J à gauche de M2(K).2. Montrer que M2(K) n’admet que {0} et M2(K) comme idéaux bilatère. (on parle
alors d’algèbre simple).
3.11 Exercice 10.Soit A un corps. Montrer que les seuls idéaux de A sont {0} et A.
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon
Exercices du chapitre 1. 43
Chapitre 4
Exercices du chapitre 1.
4.2 Exercice 11.
Soit M un A-module et m ∈ M . Montrer que −m = (−1)×m.
4.3 Exercice 12.
Soit M un groupe additif. Définir sur M la structure naturelle de Z-module, vérifiersoigneusement toutes les propriétés requises.
4.4 Exercice 13.
Soit M un Z-module.1. On suppose que M est muni d’une structure de A-module. Définir un morphisme
d’anneau f : A −→ EndZ(M).2. Soit f : A −→ EndZ(M) un morphisme d’anneau (unitaire). Définir sur M une
structure de A-module (et vérifier les propriétés requises).3. On suppose que M est un A module et soit g : B −→ A un morphisme d’anneau.
Définir sur M une structure de B-module (et vérifier les propriétés requises).
4.5 Exercice 14.
Soit K un corps commutatif et V un espace vectoriel sur K. Soit u ∈ EndK(V ). Pour toutpolynôme P (X) ∈ K[X] et tout v ∈ V on pose P (X).v = (P (u))(v). Démontrer qu’onmunit ainsi V d’une structure de K[X]-module (qui étend celle de K-espace vectoriel). Onnotera Vu cette structure de K[X]-module.
4.6 Exercice 15.
Soit M un A-module, N un sous-module de M , et S une partie de M . Soit ISN = {a ∈
A; ∀s ∈ S : a× s ∈ N}.1. Montrer que IS
N et un idéal de A.
2. Soit 〈S〉 le sous-module engendré par S. Montrer que ISN = I
〈S〉N

44 Exercices du chapitre 1.
Retenir que lorsque N est le sous-module nul IS{0} se note AnnA(S) et s’appelle l’annulateur
(du sous-module engendré par) S.
4.7 Exercice 16.
Soit M un Z-module non nul sans sous-module non triviaux (un tel module est dit simple).Montrer qu’il existe un nombre premier p tel que M soit isomorphe à Z/pZ.
4.8 Exercice 17.
Soit A un anneau commutatif Soit M un A-module monogène (i.e. il existe un m ∈ M telque M = Am). Montrer que EndA(M) est isomorphe à A/ AnnA(M). L’anneau EndA(M)est-il commutatif ?
4.9 Exercice 18.
On suppose que A est un anneau intègre commutatif qui n’est pas un corps et soit K lecorps des fractions de A. Montrer que le A-module K n’est pas libre.
4.10 Exercice 19.
Soient M = M1 ⊕M2 trois A-modules. Montrer que M2 est isomorphe à M/M1.
4.11 Exercice 20.
Soient f : M −→ N et g : N −→ M des morphismes A-linéaires. On suppose quef ◦ g = IdN . Montrer que M est isomorphe à la somme directe ker f ⊕N .
4.12 Exercice 21.
Soit M un A-module et (Mi)i=ni=1 une famille finie de sous-A-modules de M telle que :
(i) M =
⟨i=n⋃i=1
Mi
⟩
(ii) Pour tout j compris entre 1 et n− 1 on a 〈⋃i=ji=1 Mi〉 ∩Mj+1 = {0}
Montrer l’égalité M =i=n⊕i=1
Mi
4.13 Exercice 22.
Démontrer que la suite exacte de Z-modules
0 // Z/pZ x 7→px // Z/p2Z x 7→x // Z/pZ // 0
n’est pas scindée.Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon
45Exercices du chapitre 1.
4.14 Exercice 23.Trouver le sous-module de torsion des Z-modules suivant : Z(2), Z⊕ (Z/6Z), Q/Z et R/Z.
4.15 Exercice 24.Vérifier que {(2, 0, 0); (0, 1, 0)} est une partie libre de Z3 mais qu’on ne peut pas lacompléter en une base. Montrer que le système S = {(2, 0, 0); (3, 0, 0); (0, 1, 0); (0, 0, 1)}engendre Z3 mais qu’on ne peut pas en extraire une base.
4.16 Exercice 25.Soit N le sous-Z-module de M = Z3 engendré par le système
S = {(1, 4, 2); (3, 2, 6); (5, 20, 5); (3, 2, 1); (2, 3, 4)}.
Trouver un système générateur de N contenant au plus 3 éléments.
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon
46 Exercices du chapitre 1.
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon

Exercices du chapitre 0. 47
Chapitre 5
Exercices du chapitre 2.
5.2 Exercice 26.
Calculer le Z-rang du Z-module Z3/N lorsque N est engendré par les systèmes suivants :1. (1, 2,−1)
2. (1,−1,−1); (0, 1, 2)
3. (1, 0,−1); (0, 2, 3); (2, 2, 1)
4. (0, 0, 1); (2, 1,−1); (0, 1, 2); (−1,−1, 1)
5. (1, 2, 4); (−1, 3, 2); (5, 0, 8); (3,−4, 0)
5.3 Exercice 27.
Soit M le Z-module Z4 et soit N le sous-module engendré par le système S ={(2, 0, 2, 2); (0, 6, 6, 6); (−4, 0, 2, 2)}. Déterminer une Z-base de M adaptée à N et la struc-ture de M/N .
5.4 Exercice 28.
Soient A, B ∈ M2(Z). On dit que A est équivalente à B lorsqu’il existe des matrices G, Hdans GL2(Z) telles que A = GBH. On considère les matrices :
A =
[4 00 15
]et B =
[20 00 3
].
A et B sont-elles équivalentes ? Pourquoi ?
5.5 Exercice 29.
Soit K un corps commutatif, V un espace vectoriel de dimension d finie sur K etu ∈ EndK(V ). On va donner une présentation libre du module Vu de l’exercice 14. Onfixe une base (ei)
i=di=1 de V . Soit (ai,j) la matrice de u dans la base ei. On note (εi)
i=di=1 la
base canonique de (K[X])d.1. Soit ψ ∈ EndK[X](K[X]d) définie par ψ(εi) =
∑j=dj=1 ai,jεj −Xεi.
(a) Reconnaître (en fonction de u) le déterminant de ψ. Quel est son degré ?

48 Exercices du chapitre 2.
(b) En utilisant la classification des K[X]-module de type fini calculer la dimensionsur K de K[X]d/ Im(ψ).
2. Soit ϕ : K[X]d −→ Vu définie par ϕ(εi) = ei.(a) Montrer que ϕ ◦ ψ = 0.(b) En utilisant le calcul des dimensions sur K, en déduire un isomorphisme de
K[X]-module entre Vu et K[X]d/ Im(ψ).3. Soient (Pi)
i=si=1 les diviseurs élémentaires du K[X]-module de torsion Vu. Exprimer en
fonction des Pi les polynômes minimal et caractéristique de u. En déduire le théorèmede Cayley-Hamilton.
5.6 Exercice 30.Soit A un anneau principal et M un A-module de type fini. D’après le théorème declassification il existe une suite de diviseurs élémentaires dans A disons (di)
i=si=1 et des
éléments (mi)i=si=1 dans M tels que :
di | di+1 AnnA(mi) = (di) M =i=s⊕i=1
〈mi〉 ∼=i=s⊕i=1
A/(di)
1. Soit i ∈ {1, ..., s}. Montrer qu’il existe ui ∈ EndA(M) tel que
ui(m1) = ui(m2) = ... = ui(ms−1) = 0; ui(ms) = mi.
2. Soit u ∈ EndA(M) qui commute avec tous les éléments de EndA(M). Montrer que uest la multiplication par un scalaire a ∈ A.
3. Même question en supposant seulement que u : M −→ M est un morphisme degroupe additif qui commute avec tous les éléments de EndA(M).
4. Soit K un corps (commutatif) V un K-espace vectoriel de dimension finie etu ∈ EndK(V ). Soit C = {v ∈ EndK(V ); u◦v = v◦u} l’ensemble des endomorphismesde V qui commute avec u. Montrer que les seuls endomorphismes commutant avectous les éléments de C sont les polynômes en u à coefficients dans K (on pourrautiliser la structure Vu de l’exercice 14).
5.7 Exercice 31.Soit K un corps commutatif et V un espace vectoriel de dimension d finie sur K. On dit quedeux K-endomorphismes u et v (respectivement deux matrices de A et B dans Md(K)) sontsemblables si il existe f ∈ GL(V ) (respectivement P ∈ GLd(K)) telle que u = f ◦ v ◦ f−1
(respectivement A = PBP−1).1. Montrer que u et v sont semblable si et seulement si les K[X]-modules Vu et Vv sont
isomorphes (notations de l’exercice 14).2. Soit P (X) = Xn +
∑i=0i=n−1 aiX
i ∈ K[X]. Soit W le K-espace vectoriel K[X]/(P (X)),muni de la base (X i)i=n−1
i=0 . Soit uP le K-endomorphisme de W défini par lamultiplication par X. Écrire la matrice AP de uP relativement à la base qui précède.Quel est le polynôme caractéristique de uP ? son polynôme minimal ? Retenir queAP s’appelle la matrice compagnon de P .
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon

49Exercices du chapitre 0.
3. Soit A ∈ Md(K). Démontrer qu’il existe s ∈ N, s ≤ d et des polynômes (Pi)i=si=1 tels
que A est semblable à la matrice diagonale par bloc dont le ième bloc est la matricecompagnon de Pi, et Pi | Pi+1 pour i ≤ s − 1. On appelle ces (Pi) les invariants desimilitude de A. Pourquoi deux matrice semblables ont-elles les mêmes invariants desimilitude ?
4. Soit λ ∈ K soit n ∈ N, n 6= 0. Soit An(λ) = (ai,j) la matrice (dite de Jordan) deMn(K) dont tous les coefficients sont nuls sauf les diagonals tels que ai,i = λ pourtout i et les sous-diagonals tels que ai+1,i = 1. Montrer que An(λ) est semblable à lamatrice compagnon du polynôme P (X) = (X − λ)n.
5. Soit A ∈ Md(K), à quelle condition A est elle semblable à une matrice diagonalepar bloc, chaque bloc étant une matrice de Jordan ? Que peut-on dire si K estalgébriquement clos ?
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon

50 Exercices du chapitre 2.
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon
51Corrigé des exercices du chapitre 0.
Chapitre 6
Corrigé des exercices du chapitre0
6.1 Exercice 1.Commençons par préciser le morphisme f . Puisque c’est un morphisme on a f(0) = 0.L’image f(1) est d’ordre au plus 2 puisque f est un morphisme de groupe, et exactement2 puisque f est non trivial. Or dans Z/6Z le seul élément d’ordre 2 est 3. On a doncf(1) = 3 ce qui contredit déjà la condition 3 de la définition des morphismes d’anneaux.Montrons que f vérifie la condition 2. (la condition 1. affirmant que f est un morphismede groupe additif étant vérifiée par construction). Prenons x, y ∈ Z/2Z. Deux cas peuventse produire. Ou bien l’un (au moins) des deux éléments x et y est nul et la condition 2.est vérifiée pour ce couple puisqu’alors f(xy) = f(0) = 0 = f(x)f(y). Ou bien x = y = 1et on a alors f(xy) = f(1) = 3 = 3 3 = f(1)f(1) et la condition 2. est aussi vérifiée.
6.2 Exercice 2.Soit f : A −→ B un morphisme de groupes additifs.On montre l’égalité f(0A) = 0B. Soit a ∈ A. Alors f(a) = f(0A + a) = f(0A) + f(a). Enrajoutant à chaque membre −f(a) on obtient 0 = f(0A).On montre l’égalité, pour tout a dans A, f(−a) = −f(a). On a 0B = f(0A) = f(a+(−a)) =f(a) + f(−a). En rajoutant à chaque membre −f(a) on obtient −f(a) = f(−a).Soient x, y ∈ ker f . Alors f(x−y) = f(x)+f(−y) = f(x)+(−f(y)). Mais f(x) = f(y) =0B. On obtient donc f(x− y) = 0B − 0B = 0B. C’est-à-dire x− y ∈ ker f . Avec 0A ∈ ker fcela montre que ker f est un sous-groupe de A.Montrons que Im f est un sous-groupe de B. Avant tout on a 0B = f(0A) ∈ Im f . Soientb1, b2 ∈ Im f et soient a1, a2 ∈ A des antécédents respectifs (c’est-à-dire f(a1) = b1 etf(a2) = b2). Alors b1 − b2 = f(a1)− f(a2) = f(a1 − a2) ∈ Im f . Cela montre que Im f estun sous-groupe de B.
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon
52 Corrigé des exercices du chapitre 0
6.3 Exercice 3.
Soit f : A −→ B un morphisme d’anneaux. D’après la proposition 0.2 ker f est unsous-groupe additif de A et Im f est un sous-groupe additif de B. Soit a ∈ A et soitα ∈ ker f . Alors f(aα) = f(a)f(α) = f(a)0B = 0B et f(αa) = f(α)f(a) = 0Bf(a) = 0B.Donc ker f est un idéal bilatère. Montrons que Im f est un sous-anneau de B. Commef est un morphisme unitaire 1B = f(1A) ∈ Im f . Soient b1, b2 ∈ Im f et soienta1, a2 ∈ A des antécédents respectifs (c’est-à-dire f(a1) = b1 et f(a2) = b2). Alorsb1b2 = f(a1)f(a2) = f(a1a2) ∈ Im f . Cela montre que Im f est un sous-anneau de B.
6.4 Exercice 4.
On montre que ∼H est symétrique. Soient x, y ∈ G tels que x ∼H y. Par définition de ∼H
cela équivaut à x− y ∈ H. Mais comme H est un sous-groupe il contient l’inverse de tousses éléments, en particulier −(x− y) = y − x ∈ H. Cela donne y ∼H x.On montre que ∼H est reflexive. Soit x ∈ G. Comme H est un sous-groupe il contientl’élément neutre, et on a donc x− x = 0G ∈ H. D’où x ∼H x.
6.5 Exercice 5.
Soient H ⊂ G un sous-groupe additif. Au début de la preuve du théorème 0.1, on a définisur G/H une loi de composition interne + en posant x + y = x + y et on a déjà vérifiée danscette même preuve que cette définition ne dépend pas du choix de x ∈ x ni de y ∈ y. Soientx, y, z ∈ G et soit x, y, z leurs classes respectives dans G/H. Comme + est commutatifdans G on a x + y = x + y = y + x = x + y, donc + est commutatif. Comme 0G est élémentneutre pour + on a 0G +x = x + 0G = x + 0G = x, donc 0G = 0G/H est élément neutrepour +. Comme x admet un inverse additif −x pour + on a x + −x = −x + x = −x + x =0G = 0G/H , donc tout x de G/H admet un élément neutre pour +. Comme + est associativeon a x + (y + z) = x + y + z = x + (y + z) = (x + y) + z = x + y + z = (x + y) + z.Donc + est associative. Montrons que ker πH = H. On a vu que πH(0G) = 0G = 0G/H .Cela donne les équivalences pour tout h ∈ G :h ∈ ker πH ⇐⇒ h = 0G ⇐⇒ h ∼H 0G ⇐⇒ h − 0G ∈ H ⇐⇒ h ∈ H. D’où l’égalitéker πH = H.
6.6 Exercice 6.
1. On suppose I premier. Soient x, y ∈ A/I tels que xy = 0A/I , et soient a, b ∈ A,tels que a = x et b = y. Alors ab = 0A/I et donc ab ∈ I. Comme I est premier on aa ∈ I ou bien b ∈ I, c’est-à-dire x = a = 0A/I ou bien y = b = 0A/I . Cela montre queA/I est intègre. Réciproquement on suppose A/I intègre. Soient a ∈ A et b ∈ A telsque ab ∈ I. Alors dans le quotient A/I on obtient 0A/I = ab = a b. Mais comme A/I
est intègre on obtient a = 0A/I ou bien b = 0A/I , c’est-à-dire a ∈ I ou bien b ∈ I.
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon

53Corrigé des exercices du chapitre 0.
2. On suppose I maximal. Soit x ∈ A/I non nul et a ∈ A tel que a = x. Alors a 6∈ I.Et comme I est maximal l’idéal (a) + I qui contient strictement I est égal à A toutentier, donc contient 1A. En particulier il existe i ∈ I et α ∈ A tels que 1A = αa + i.En réduisant modulo I on obtient 1A/I = α a = αx ce qui montre que x = a estinversible. L’anneau A/I est donc bien un corps. Réciproquement on suppose que A/Iest un corps. Soit J un idéal de A contenant strictement I. montrons que J = A. Soitj ∈ J n’appartenant pas à I. Alors dans A/I son image j est inversible. Il existe donci ∈ I et α ∈ A tels que αj + i = 1A. Mais comme I ⊂ J il suit 1A ∈ J c’est-à-direJ = A.
6.7 Exercice 7.
1. On suppose que A est un corps. Soient a, b dans A tels que ab = 0. Si a 6= 0 alors aest inversible et on obtient b = a−1ab = a−10 = 0. Si b 6= 0 alors b est inversible eton obtient a = abb−1 = 0b−1 = 0. Cela montre que A est intègre.
2. On suppose A intègre et fini. Soit a ∈ A tel que a 6= 0. Alors l’endomorphisme degroupe de A défini par x 7→ ax est injectif puisque ax = 0 ⇐⇒ x = 0. Comme Aest fini ce morphisme est donc aussi surjectif. En particulier il existe α ∈ A tel queaα = 1A. Cela montre que A est un corps.
6.8 Exercice 8.
1. Clairement 0 ∈ N(A). Soient a ∈ N(A) et α ∈ A. Alors il existe n ∈ N tel quean = 0. Comme A est commutatif il vient (αa)n = αnan = 0. Donc αa ∈ N(A).Montrons que N(A) est un sous-groupe. Soient a, b ∈ N(A). Alors il existe n ∈ Net m ∈ N tels que an = bm = 0. Par le binôme de Newton (valable dans tout anneaucommutatif) on obtient
(a + (−b))n+m =n+m∑j=0
(−1)n+m
(n + m
j
)ajbn+m−j
Mais si j ≤ n alors aj = 0 tandis que si j < n alors bn+m−j = 0. Chacun des sommantest nul et donc a− b ∈ N(A).
2. Comme N(A) est un sous-groupe cela revient à montrer que 1− u ∈ A×. Soit n ∈ Ntel que un = 0. On a
1 = 1− un = (1− u)n−1∑j=0
uj.
Donc 1− u ∈ A×.
6.9 Exercice 9.
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon

54 Corrigé des exercices du chapitre 0
1. Les deux ensembles I et J sont des sous-groupes (en fait ce sont même des sous-K-espaces vectoriels de M2(K)). Pour montrer que I est un idéal à droite on calcule lesproduits (pour tout a, b, c, d, e, f de K) :
(0 0a b
)(c de f
)=
(0 0
ac + be ad + bf
)∈ I
Pour montrer que J est un idéal à gauche on effectue le calcul ci dessous (pour touta, b, c, d, e, f de K) :
(c de f
)(a 0b 0
)=
(ca + db 0ea + fb 0
)∈ J
2. On considère la matrice de permutation τ ci-dessous :
τ =
(0 11 0
).
On constate que multiplier une matrice par τ à gauche (resp. à droite) échange cesdeux lignes (resp. colonne) d’où la terminologie de matrice de permutation :
(0 11 0
)(a bc d
)=
(c da b
)et
(a bc d
)(0 11 0
)=
(b ad c
)
Soit I un idéal bilatère non-nul de M2(K) et soit α ∈ I tel que α 6= 0. On écrit
α =
(a bc d
). L’un au moins des coefficients a, b, c ou d est non nul. Comme pour
tout x ∈ I on a xτ ∈ I et τx ∈ I, on peut supposer (quite à changer α) que lecoefficient non nul de α est a 6= 0. On a alors
(a−1 00 0
)(a bc d
)(1 00 0
)=
(1 00 0
)∈ I.
Etτ
(1 00 0
)=
(0 01 0
)∈ I.
Et (0 01 0
)τ =
(0 00 1
)∈ I.
Et (1 00 0
)τ =
(0 10 0
)∈ I
Finalement, pour tout a, b, c et d de K on a(
a bc d
)=
(a 00 a
)(1 00 0
)+
(b 00 b
)(0 10 0
)
+
(c 00 c
)(0 01 0
)+
(d 00 d
)(0 00 1
)∈ I
Cela montre que le seul idéal bilatère non nul de M2(K) est M2(K) tout entier. Ceraisonnement se généralise à Mn(K) pour tout n (mais on doit utiliser les matricesde transpositions plus générales notées Sk,l dans le paragraphe 2.3) .
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon

55Corrigé des exercices du chapitre 0.
6.10 Exercice 10.Soit x 6= 0 un élément non nul d’un idéal I (non nul) de A. Alors x est inversible et touty ∈ A s’écrit y = yx−1x donc y ∈ I. Cela montre que le seul idéal non nul de A est A toutentier.
Fin du corrigé des exercices du chapitre 0.
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon

56 Corrigé des exercices du chapitre 0
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon
57Corrigé des exercices du chapitre 1.
Chapitre 7
Corrigé des exercices du chapitre1
7.11 Exercice 11.
On montre d’abord pour tout m ∈ M que 0A × m = 0M . On a 0A × m + m =0A × m + 1A × m = (0A + 1A) × m = 1A × m = m. En rajoutant −m aux deuxtermes extrêmes on obtient comme annoncé 0A × m = 0M . On calcule maintenant(−1A) × m + m = (−1A + 1A) × m = 0A × m = 0M . Par l’unicité de l’inverse additifdans M on en déduit −m = (−1A)×m.
7.12 Exercice 12.
Soit k ∈ Z et m ∈ M . On commence par définir la notation k.m. Pour k ≥ 0 on procèdepar récurrence en posant 0.m = m et k.m = (k − 1).m + m pour k > 0. Pour k < 0on pose k.m = −((−k).m). Cela définit une opération externe de Z sur M . On vérifiemaintenant que cette opération satisfait les axiomes (a), (b), (c), et (g) de la définitiondes modules. L’axiome (c) est immédiat puisque par définition pour tout m ∈ M on a1.m = 0.m + m = 0M + m = m. On va d’abord vérifier les deux propriétés ci-dessous pourtout a ∈ Z et tout m ∈ M .
(i) (−a).m = −(a.m)
(ii) (a + 1).m = a.m + m
Lorsque a ≥ 0 ces propriétés sont explicitement dans la définition de l’opération externe deZ. Montrons (i) pour a < 0. Par définition (a.m) = −((−a).m). Donc (a.m) + ((−a).m) =0M . Par unicité de l’inverse additif on conclut à (−a).m = −(a.m). Montrons (ii) poura < 0. Si a = −1, alors (a+1).m = 0M = (−1)m+m. Par définition de l’opération externepour tout x ∈ Z, x ≥ 0 on a x.m = (x + 1).m − m. En particulier pour a < −1 on endéduit :
(x + 1).m = −((−x− 1).m) par définition de .
= −((−x).m−m) par la remarque qui précède= −(−x).m + (−(−m)) car dans un groupe additif l’inverse d’une sommeest la somme des inverses= x.m + m par le (i) et l’unicité de l’inverse additif
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon

58 Corrigé des exercices du chapitre 1
On commence par vérifier le (a). Soient a ∈ Z et m, m′ ∈ M . Pour a ≥ 0 on procède parrécurrence. Si a = 0 c’est la définition de . puisque 0m = 0M pour tout m. Supposons doncl’axiome (a) vérifié pour tout m, tout m′ au rang a = k ≥ 0. Alors on obtient :
(k + 1).(m + m′) = k.(m + m′) + (m + m′) par définition de .
= k.m + k.m′ + m + m′ par récurrence= (k + 1).m + (k + 1).m′ par définition de .
Ceci démontre par le principe de récurrence l’axiome (a) pour a ≥ 0. Si a < 0 alors :
a.(m + m′) = −((−a).(m + m′)) par définition de .
= −((−a).m + (−a).m′) car − a ≥ 0
= −(−(a.m) + (−(a.m′))) par (i)
= a.m + a.m′ car dans un groupe additif l’inverse d’une sommeest la somme des inverses
L’axiome (a) est vérifié. On démontre maintenant l’axiome (b). Soient a, b ∈ Z et soitm ∈ M . On doit montrer que (a+b).m = a.m+b.m. Pour a ≥ 0, on procède par récurrencesur a. Si a = 0 il n’y a rien à montrer. On suppose l’axiome (b) vérifié au rang a = k etpour tout b ∈ Z. Alors on obtient
((k + 1) + b).m = (k + (b + 1)).m
= k.m + (b + 1).m par récurrence= k.m + b.m + m par (ii)
= k.m + m + b.m car M est commutatif= (k + 1).m + b.m par (ii)
Par le principe de récurrence ceci démontre l’axiome (b) pour tout a ≥ 0. Si a < 0 alors :
(a + b).m = −(−a + (−b)).m par (i) et − (a + b) = −a + (−b)
= −((−a).m + (−b).m) par (b) pour − a > 0
= −(−a).m + (−(−b).m) car dans l e groupe additif M
l’inverse d’une somme est la somme des inverses= a.m + b.m
par (i)
L’axiome (b) est vérifié. Vérifions l’axiome (g) en utilisant l’axiome (b). On doit vérifierpour tout a, b dans Z et tout m ∈ M l’égalité a.(b.m) = (ab).m. Pour a ≥ 0 on procèdepar récurrence sur a. Si a = 0 cela équivaut à 0M = 0M . Supposons l’axiome (g) vérifiépour tout b, tout m et pour a = k ≥ 0. Alors on obtient
(k + 1).(b.m) = k.(b.m) + (b.m) par définition de .
= (kb).m + b.m par récurrence= (kb + b).m par (b)
= ((k + 1)b).m
Ceci démontre par le principe de récurrence l’axiome (g) pour a ≥ 0. Si a < 0 alors(a.(b.m)) = −((−a).(b.m)) = −((−ab).m) = (ab).m en utilisant dans l’ordre des égalitésla définition de ., l’axiome (g) pour −a ≥ 0, et la propriété (i).
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon

59Corrigé des exercices du chapitre 1.
7.13 Exercice 13.
1. Soit a ∈ A, on doit définir f(a) ∈ EndZ(M). Pour ce on pose (f(a))(m) = a.m. Celadéfinit clairement une application f : A −→ MM , où MM désigne l’ensemble desapplications de M dans lui-même. Montrons l’image de f est contenu dans EndZ(M).Soit m, m′ ∈ M et soit a ∈ A. Alors par l’axiome (a) du module M sur A, on af(a)(m + m′) = a.(m + m′) = a.m + a.m′ = (f(a))(m) + (f(a))(m′). Donc f(a)est un morphisme de groupe. Par le même style de récurrence que pour l’exercice12 et avec la propriété pour tout morphisme de groupe additif f(−x) = −f(x), ondémontre que tout morphisme de groupe additif est un morphisme de Z-module pourla structure naturelle du même exercice. On a bien Im(f) ⊂ EndZ(M). Vérifions quef est un morphisme d’anneau (unitaire). Soient a, b ∈ A. Alors pour tout m ∈ Mon a (f(a + b))(m) = (a + b).m = a.m + b.m = f(a)(m) + f(b)(m), par l’axiome(b) de la structure de A-module sur M . Cela montre que f est un morphisme degroupe. Pour tout m de M , par l’axiome (c) de la structure de A-module sur M ona f(1)(m) = 1.m = m. Donc f(1) est bien le morphisme identité de M , c’est-à-direl’élément neutre pour la composition des applications. De plus pour tout a, b ∈ Aet tout m ∈ M on a f(ab)(m) = (ab).m = a.(b.m) = f(a)(b.m) = f(a)(f(b)(m)) =(f(a) ◦ f(b))(m) par l’axiome (g) de la structure de A-module de M . Cela montreque f est un morphisme d’anneau unitaire.
2. On suit la démarche réciproque à celle de la question précédente. On démontreainsi l’équivalence entre la donnée d’une structure de A-module sur M et celled’un morphisme d’anneau de A dans EndZ(M). On commence par définir l’opérationexterne a.m de A sur M en posant a.m = f(a)(m) pour tout a et tout m de M .On vérifie ensuite les quatre propriétés requises en reprenant une à une les égalitésde la question précédente. Comme pour tout a dans A l’application f(a) est unmorphisme de groupe on a pour tout m et tout m′ de M les égalités a.(m + m′) =f(a)(m + m′) = f(a)(m) + f(a)(m′) = a.m + a.m′. D’où l’axiome (a). Comme fest un morphisme de groupe on a pour tout a, b ∈ A et tout m ∈ M les égalités(a + b).m = f(a + b)(m) = (f(a) + f(b))(m) = (f(a))(m) + (f(b))(m) = a.m + b.m.D’où l’axiome (b). Comme f est un morphisme d’anneau unitaire on a pour toutm ∈ M et tout a, b ∈ A les égalités 1.m = f(1)(m) = m d’où l’axiome (c) et(ab).m = f(ab)(m) = (f(a) ◦ f(b))(m) = f(a)(f(b)(m)) = a.(f(b)(m)) = a.(b.m)d’où l’axiome (g).
3. En utilisant le 2., il nous suffit de définir un morphisme d’anneau unitaire β : B −→EndZ(M). Pour ce, on utilise le morphisme f : A −→ EndZ(M) défini par le 1., eton pose β = f ◦ g. Alors β est bien un morphisme d’anneau unitaire et par le 2.,on sait qu’on définit une structure de B-module sur M en posant b.m = β(b)(m) =f(g(b))(m) = g(b) ∗m si ∗ désigne l’opération de A.
7.14 Exercice 14.
Pour λ ∈ K et x ∈ V on note λ ∗ x l’opération externe de K sur V . Étant donné unélément u de la K-algèbre EndK(V ), par la propriété universelle des algèbres de polynômesil existe un unique morphisme de K-algèbre fu : K[X] −→ EndK(V ) tel que fu(X) = u.Il s’agit du morphisme d’évaluation en u défini par f(
∑i aiX
i) =∑
i ai ∗ ui où le ∗Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon
60 Corrigé des exercices du chapitre 1
désigne l’opération externe de K sur l’algèbre EndK(V ) et la puissance ui est défini parla multiplication interne dans EndK(V ). Avec l’inclusion EndK(V ) ⊂ EndZ(V ) on obtientun morphisme d’anneau fu : K[X] −→ EndZ(V ). Par la question 2 de l’exercice 13 untel morphisme d’anneau unitaire permet de munir V d’une structure de K[X]-module enposant P (X).v = f(P (X))(v) = (P (u))(v), ce qui redonne la formule de l’énoncé. Enfin siλ ∈ K ⊂ K[X] alors fu(λ) = fu(λX0) = λ ∗ u0 = λ ∗ Id et en particulier pour tout v ∈ Von a bien λ.v = λ ∗ v de sorte que l’opération de K[X] étend bien celle de K.
7.15 Exercice 15.
1. Pour tout s ∈ S on a 0.s = 0 ∈ N car N est un sous-module de M . Donc 0 ∈ ISN .
Soient a, b ∈ ISN , alors pour tout s ∈ S on a (a− b).s = a.s− b.s ∈ N car N est un
sous-module. Donc (a − b) ∈ ISN et IS
N est un sous-groupe additif de A. Soit a ∈ Aet i ∈ IS
N . Alors pour tout s ∈ S on a (ai).s = a.(i.s) ∈ N car i.s ∈ N et N est unsous-module. Cela montre que IS
N est un idéal de A.
2. comme 〈S〉 ⊂ S on a par définition l’inclusion ISN ⊂ I
〈S〉N . Réciproquement prenons
i ∈ ISN et x ∈ 〈S〉. Par la proposition 1.10 on sait qu’il existe une famille (λs)s∈S
d’éléments de A, tous nul sauf un nombre fini, tels que x =∑
s∈S λss. Il suitix =
∑s∈S i(λss) =
∑s∈S λs(is) ∈ N car pour tout s on a is ∈ N et N est un
sous-module. Cela montre l’inclusion réciproque et l’égalité annoncée.
7.16 Exercice 16.
On doit aussi supposer M 6= {0}. Prenons x 6= 0 et x ∈ M . Alors le sous-module engendrépar x est non nul donc égal à M tout entier. On obtient donc un morphisme surjectifφx : Z −→ M en posant φx(k) = kx. Par factorisation M est isomorphe à Z/ ker φx et ilreste à vérifier que ker φx est un idéal maximal. Mais comme M est simple Z/ ker φx n’a pasde sous-module non triviaux c’est-à-dire pas d’idéaux non triviaux. Cet anneau quotientest donc un corps, ce qui montre que ker φx est un idéal maximal de Z.
7.17 Exercice 17.
On doit supposer A commutatif. Pour toute A-algèbre B l’application a ∈ A 7→ a.1B ∈ Best un morphisme de A-algèbre. En particulier pour tout A-module M on a un morphismede A algèbre canonique ϕ : A −→ EndA(M) défini par (ϕ(a))(m) = a.m, autrement ditpar l’opération externe. Montrons que AnnA(M) = ker ϕ. Soit x ∈ AnnA(M). Alorspour tout m ∈ M on a 0 = x.m = (ϕ(x))(m). Donc x ∈ ker ϕ. Réciproquement soitx ∈ ker ϕ. Alors l’application m 7→ x.m est l’endomorphisme nul de M . Donc pourtout m ∈ M on a x.m = 0. Donc x ∈ AnnA(M). On obtient ainsi en toute généralitéun morphisme injectif f : A/AnnA(M) −→ EndA(M). Montrons que si en outre M estmonogène alors ce morphisme est surjectif. Soit f ∈ EndA(M) et soit m ∈ M tel queM = Am. Alors f(m) ∈ M et donc il existe λ ∈ A tel que f(m) = λ.m. Mais alors pourtout x = µm ∈ M on a f(x) = f(µ.m) = µ.f(m) = µ.(λ.m) = λ.(µ.m) = λ.x. Ce quimontre que f = ϕ(λ) ∈ Im ϕ. On a donc bien isomorphie entre A/AnnA(M) et EndA(M).Cela démontre aussi que EndA(M) est commutatif (puisque A l’est).
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon
61Corrigé des exercices du chapitre 1.
7.18 Exercice 18.On doit supposer A 6= K Soient x = a/b et y = c/d deux éléments de K distincts (aveca, b, c d ∈ A, b 6= 0 et d 6= 0). Alors (bc).x = ac = (da).y et donc (bc).x − (da).y = 0.Puis que x et y sont distincts, l’un deux au moins est non nul et donc bc ou da est nonnul. Donc x et y sont linéairement dépendant. Pour cette raison, si K est libre alors c’estun module libre de rang 1. Montrons par l’absurde que ce n’est pas le cas. Soit x ∈ K telque Ax = K et soit y ∈ A tel que y 6= 0 et y 6∈ A×. Alors Pour tout a dans A on a ay 6= 1et donc ax 6= x/y. Donc x/y n’est pas dans le module engendré par x, ce qui contreditAx = K.
7.19 Exercice 19.Par la proposition 1.9 on peut identifier les notions de sommes directes internes et externes.Pour cet exercice on considère que M1 et M2 sont des sous-modules de M et qu’il sontsupplémentaire l’un à l’autre dans M . C’est avec ce point de vue que le quotient M/M1 a unsens (sinon il faudrait remplacer M/M1 par M/ı1(M1)). Ceci dit par le premier théorèmed’isomorphie de Noether on a M/M1 = (M1 +M2/M1) ∼= M2/(M1∩M2) = M2/{0} ∼= M2.
7.20 Exercice 20.Puisque f ◦g = IdN alors g est injective. En effet si x ∈ ker g, alors x = f(g(x)) = f(0) = 0.Donc on a isomorphie entre N et g(N) ⊂ M . Pour obtenir un isomorphisme entreN ⊕ ker f et M on va montrer que g(N) est un supplémentaire à ker f dans M . Soitx ∈ (g(N) ∩ ker f). Alors il existe y ∈ N tel que x = g(y). Mais comme x ∈ ker f onobtient y = f(g(y)) = f(x) = 0. Et en appliquant g on trouve x = g(y) = g(0) = 0. Soitm ∈ M , et soit n = f(m) ∈ N . Alors f(m − g(n)) = f(m) − f(g(n)) = n − n = 0. Doncm− g(n) ∈ ker f et m = g(n) + (m− g(n)) ∈ g(N) + ker f . Donc M = ker f + g(N) et lasomme est directe.
7.21 Exercice 21.Compte-tenu de (i) il s’agit de montrer que pour tout j le sous-module Mj est facteurdirect du module
⟨⋃i 6=j Mi
⟩. On procède par récurrence sur n à partir de n = 2.
Si n = 2 il n’y a rien à montrer. Supposons la propriété vraie pour toute famille dek sous-modules M1, · · · ,Mk dans tout module M ′ = 〈M1
⋃M2 · · ·Mk〉 avec k ≥ 2.
Prenons M1, · · · ,Mk, Mk+1 des sous-modules de M vérifiant (i) et (ii). Alors la sous-famille M1, · · · ,Mk vérifie (i) et (ii) dans le sous-module M ′ = 〈M1
⋃M2
⋃ · · ·Mk〉. Parrécurrence M ′ est somme directe interne M ′ =
⊕i=ki=1 Mi. De plus la propriété (ii) pour
j = n = (k+1)−1 montre que les sous-modules Mk+1 et M ′ sont facteurs directs. Par (i) ilssont supplémentaires l’un à l’autre et on a donc M = M ′ ⊕ Mk+1 = (
⊕i=ki=1 Mi)
⊕Mk+1.
7.22 Exercice 22.Par le lemme 1.4 si cette suite exacte est scindée on a un isomorphisme (de groupe ou deZ-module) entre Z/pZ ⊕ Z/pZ et Z/p2Z. Cela est absurde puisque tous les éléments du
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon

62 Corrigé des exercices du chapitre 1
premier groupe sont d’ordre divisant p tandis que dans le second 1 est d’ordre p2.
7.23 Exercice 23.
TZ(Z(2)) = {(x, y) ∈ Z2; ∃λ ∈ Z λx = λy = 0} = {(0, 0)}Et en général tout module libre sur un anneau intègre est sans torsion.Le module Z⊕Z/6Z contient le sous-module {(0, y); y ∈ Z/6Z} ce dernier étant de torsionpuisqu’annulé par 6. Réciproquement si (x, y) ∈ TZ(Z⊕Z/6Z) alors il existe λ non nul dansZ tel que λ(x, y) = (λx, λy) = (0, 0). Cela entraîne x = 0 d’où (x, y) ∈ {(0, y); y ∈ Z/6Z}.On a donc TZ(Z⊕ Z/6Z) = {(0, y); y ∈ Z/6Z}.Le module Q/Z est de torsion. Montrons le. Soit x ∈ Q/Z. Alors il existe a, b ∈ Z telsque b 6= 0 et x = πZ(a/b). Il suit bx = bπZ(x) = πZ(bx) = πZ(a) = 0 car a ∈ Z. Enparticulier TZ(Q/Z) = Q/Z. Le même raisonnement (et sa conclusion) demeurent valablesi on remplace Z par tout anneau commutatif intègre et Q par le corps des fractions de cetanneau.Pour x ∈ R on a équivalence entre l’existence d’un λ dans Z non nul tel que λx ∈ Z etl’appartenance de x à Q. En passant au quotient modulo Z on en déduit TZ(R/Z) = Q/Z.
7.24 Exercice 24.
Les vecteurs e1 = (2, 0, 0) et e2 = (0, 1, 0) sont clairement linéairement indépendants.Montrons par l’absurde qu’on ne peut pas les compléter en une base. Soit e3 = (x, y, z)dans Z3 tels que e1, e2, e3 soit une base de Z3. Alors il existe λ, µ, ν dans Z tels queλe1 + µe2 + νe3 = (1, 0, 0). Cela conduit au système d’équations linéaires :
2λ + νx = 1
µ + νy = 0
νz = 0
En regardant la troisième équation on obtient ν = 0 ou z = 0. Si ν = 0 alors on trouvesur la première équation 2λ = 1 ce qui est absurde. Si z = 0 alors tous les ei sont dansle sous-module (strict) engendré par (1, 0, 0) et (0, 1, 0). Dans tous les cas {e1, e2, e3} n’estpas une base.On remarque que (2, 0, 0) = 2(1, 0, 0) c’est-à-dire que le vecteur (2, 0, 0) n’est pas indivisible.Dans les modules libres de rang finis sur les anneaux principaux les vecteurs d’une basesont indivisible, et réciproquement.On note ε1 = (2, 0, 0), ε2 = (3, 0, 0), ε3 = (0, 1, 0) et ε4 = (0, 0, 1) de sorte queS = {ε1, ε2, ε3, ε4}. Pour tout (x, y, z) ∈ Z3 on a (x, y, z) = x(ε2 − ε1) + yε3 + zε4 donc Sengendre Z3. Par l’unicité du rang des modules libres si il est possible d’extraire une basede S ce sera en enlevant un seul vecteur. En outre ε1 et ε2 sont linéairement dépendantcar ils vérifient 3ε1 − 2ε2 = 0. Donc si il est possible d’extraire une base de S ou bienS\{ε1} est une base ou bien S\{ε2} est une base. Mais S\{ε2} contient les vecteurs e1
et e2 du début de l’exercice donc n’est pas une base. En reprenant exactement le mêmeraisonnement on peut voir qu’il n’est pas possible de compléter {ε2, ε3} en une base. On adonc épuisé toutes les possibilités : S ne contient pas de base.
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon
63Corrigé des exercices du chapitre 1.
7.25 Exercice 25.On obtient un tel système en prenant S2 = {(1, 4, 2); (5, 20, 5); (2, 3, 4)}. En effet S2 ⊂ Sdonc 〈S2〉 ⊂ 〈S〉 = N . Réciproquement on doit montrer l’inclusion S\S2 ⊂ 〈S2〉. Cettedernière inclusion est une conséquence des égalités : (3, 2, 6) = 2(2, 3, 4) − (1, 4, 2) et(3, 2, 1) = (5, 20, 5) + 2(2, 3, 4)− 6(1, 4, 2).
Fin du corrigé des exercices du chapitre 1.
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon

64 Corrigé des exercices du chapitre 1
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon
65Corrigé des exercices du chapitre 2.
Chapitre 8
Corrigé des exercices du chapitre2
8.26 Exercice 26.
1. Le vecteur (1, 2,−1) est non nul il engendre donc un sous-module de rang 1.2. Les deux vecteurs (1,−1,−1) et (0, 1, 2) sont linéairement indépendants, ils engen-
drent donc un sous-module de rang 2.3. les vecteurs (1, 0,−1) et (0, 2, 3) sont linéairement indépendants. Par contre on a
(2, 2, 1) = 2(1, 0,−1) + (0, 2, 3). Donc N est de rang 2.4. D’après le lemme 2.1 le module N est libre de rang au plus 3. Réciproquement les
vecteurs (−1,−1, 1); (0, 1, 2) et (0, 0, 1) et sont linéairement indépendants (en effet lamatrice de leur coefficients est triangulaire avec des coefficients ±1 sur la diagonale).Donc N est de rang 3.
5. Les deux vecteurs (1, 2, 4) et (−1, 3, 2) sont linéairement indépendants. Le rang deN est donc au moins 2. De plus on constate que (5, 0, 8) = 3(1, 2, 4)− 2(−1, 3, 2) et(3,−4, 0) = (1, 2, 4)−2(−1, 3, 2). Le sous-module N est donc librement engendré parles deux vecteurs (1, 2, 4) et (−1, 3, 2) : son rang est 2.
8.27 Exercice 27.
On doit réduire, en suivant la méthode de l’exemple détaillé en cours la matrice descoordonnées des vecteurs de S, que l’on complète par (0, 0, 0, 0) pour obtenir une matricecarrée.
2 0 −4 0 X0 6 0 0 Y2 6 2 0 Z2 6 2 0 T
C1 ← C1 − C3
∼
6 0 −4 0 X0 6 0 0 Y0 6 2 0 Z0 6 2 0 T
∼
0 6 2 0 Z0 6 0 0 Y6 0 −4 0 X0 6 2 0 T
C1 ← C3
C3 ← C1
∼
2 6 0 0 Z0 6 0 0 Y−4 0 6 0 X2 6 0 0 T
∼
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon
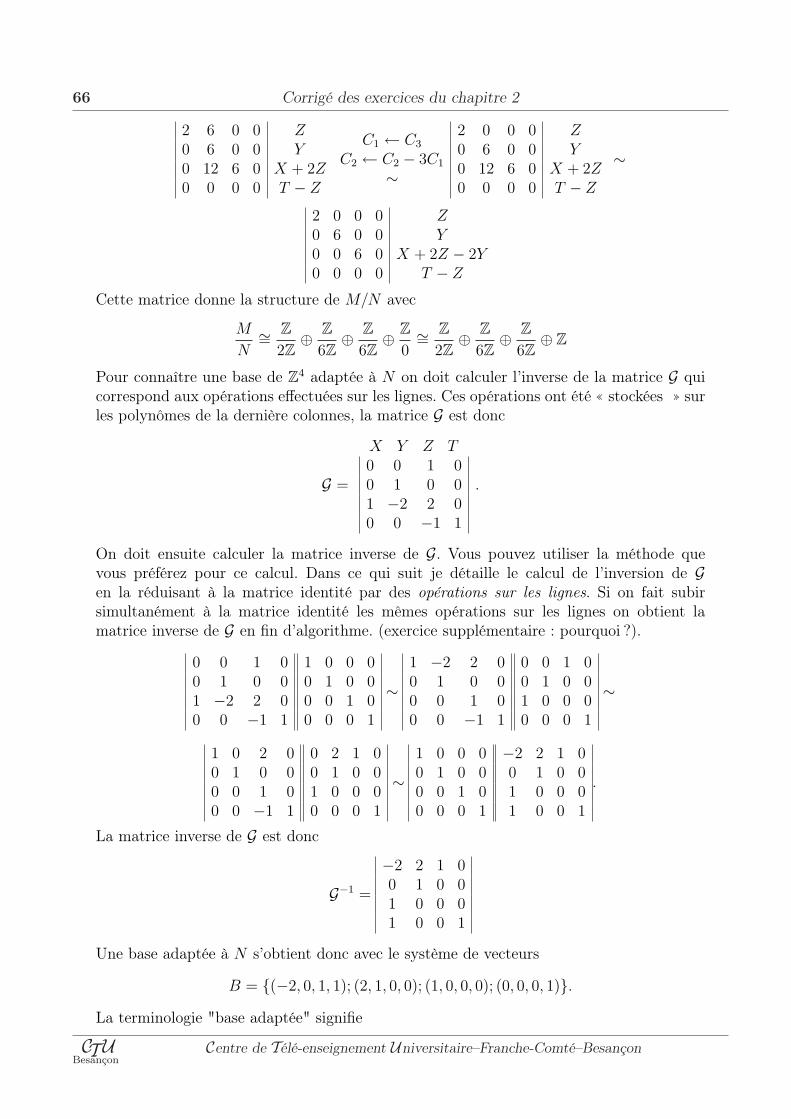
66 Corrigé des exercices du chapitre 2
2 6 0 0 Z0 6 0 0 Y0 12 6 0 X + 2Z0 0 0 0 T − Z
C1 ← C3
C2 ← C2 − 3C1
∼
2 0 0 0 Z0 6 0 0 Y0 12 6 0 X + 2Z0 0 0 0 T − Z
∼
2 0 0 0 Z0 6 0 0 Y0 0 6 0 X + 2Z − 2Y0 0 0 0 T − Z
Cette matrice donne la structure de M/N avec
M
N∼= Z
2Z⊕ Z
6Z⊕ Z
6Z⊕ Z
0∼= Z
2Z⊕ Z
6Z⊕ Z
6Z⊕ Z
Pour connaître une base de Z4 adaptée à N on doit calculer l’inverse de la matrice G quicorrespond aux opérations effectuées sur les lignes. Ces opérations ont été (( stockées )) surles polynômes de la dernière colonnes, la matrice G est donc
G =
X Y Z T0 0 1 00 1 0 01 −2 2 00 0 −1 1
.
On doit ensuite calculer la matrice inverse de G. Vous pouvez utiliser la méthode quevous préférez pour ce calcul. Dans ce qui suit je détaille le calcul de l’inversion de Gen la réduisant à la matrice identité par des opérations sur les lignes. Si on fait subirsimultanément à la matrice identité les mêmes opérations sur les lignes on obtient lamatrice inverse de G en fin d’algorithme. (exercice supplémentaire : pourquoi ?).
0 0 1 0 1 0 0 00 1 0 0 0 1 0 01 −2 2 0 0 0 1 00 0 −1 1 0 0 0 1
∼1 −2 2 0 0 0 1 00 1 0 0 0 1 0 00 0 1 0 1 0 0 00 0 −1 1 0 0 0 1
∼
1 0 2 0 0 2 1 00 1 0 0 0 1 0 00 0 1 0 1 0 0 00 0 −1 1 0 0 0 1
∼1 0 0 0 −2 2 1 00 1 0 0 0 1 0 00 0 1 0 1 0 0 00 0 0 1 1 0 0 1
.
La matrice inverse de G est donc
G−1 =
−2 2 1 00 1 0 01 0 0 01 0 0 1
Une base adaptée à N s’obtient donc avec le système de vecteurs
B = {(−2, 0, 1, 1); (2, 1, 0, 0); (1, 0, 0, 0); (0, 0, 0, 1)}.La terminologie "base adaptée" signifie
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon

67Corrigé des exercices du chapitre 2.
– B est une base de Z4
– le système B = {2(−2, 0, 1, 1); 6(2, 1, 0, 0); 6(1, 0, 0, 0); 0(0, 0, 0, 1)} obtenu en multi-pliant dans l’ordre les vecteurs de B par les diviseurs élémentaires de N est unebase de N (après que l’on ait supprimé les vecteurs nuls).
Après le calcul d’une base adaptée je recommande vivement de s’assurer par un calculdirect que le système dibi où di est le ième diviseur élémentaire et bi le ième vecteur de labase adaptée est bien contenu dans le module de départ. Cela fournit un test assez rapidepour la justesse des autres calculs. Par exemple ici on a :
2(−2, 0, 1, 1) = (−4, 0, 2, 2) ∈ N
6(2, 1, 0, 0) = (12, 6, 0, 0) = −3(−4, 0, 2, 2) + (0, 6, 6, 6) ∈ N
6(1, 0, 0, 0) = (6, 0, 0, 0) = (2, 0, 2, 2)− (−4, 0, 2, 2) ∈ N
8.28 Exercice 28.Il est important de retenir que classifier les modules à isomorphisme près c’est la mêmechose que classifier les matrices de relations à équivalence près. Dans le cours on a fait laclassification des modules en se servant de la classification des matrices. Ici on utilise la dé-marche réciproque. En effet par le lemme Chinois, on a des isomorphismes :Z/4Z⊕Z/15Z ∼=Z/60Z ∼= Z/20Z⊕Z/3Z. En particulier lorsqu’on réduit chaque matrice à son représentantcanonique, à savoir diagonal et avec des coefficients diagonals ordonnés par divisibilité onobtient dans les deux cas la matrice [
1 00 60
].
Les deux matrices du départ sont donc équivalentes. On pouvait aussi de façon pluscalculatoire réduire chaque matrice par l’algorithme de Smith.
8.29 Exercice 29.On note A = (ai,j) la matrice de u de l’énoncé.
1. (a) Si on écrit la matrice de ψ dans la base canonique de K[X]d on retrouve lamatrice caractéristique de u c’est-à-dire la matrice A − X Id. Le déterminantde ψ est donc le polynôme caractéristique de u, de degré d. Pour la suite del’exercice on notera χ(X) ce polynôme.
(b) D’après le théorème de classification on sait qu’il existe P1(X), · · · , Ps(X) dansK[X] tels que K[X]d/ Im ψ soit isomorphe à la somme directe
s⊕i=1
K[X]/(Pi(X)) .
Pour calculer ces Pi on sait qu’on réduit la matrice de ψ avec des opérations élé-mentaires qui laissent le déterminant inchangé. En particulier χ(X) = det ψ =∏
i Pi. Aucun Pi n’est nul et la dimension sur K de chaque facteur K[X]/(Pi(X))est égal au degré de Pi(X). Il suit dimK(K[X]d/ Im ψ) =
∑i deg(Pi(X)) =
deg(χ(X)) = d.
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon
68 Corrigé des exercices du chapitre 2
2. (a) Soit i fixé 1 ≤ i ≤ d. On calcule ϕ(ψ(εi)) = ϕ(∑
j ai,jεj − Xεi) =∑
j ai,jεj −X.εi = u(εi)− u(εi) = 0. Donc le morphisme K[X]-linéaire ϕ ◦ ψ est nul sur unsystème générateur de K[X]d.
(b) L’égalité ϕ ◦ ψ = 0 donne l’inclusion Im ψ ⊂ ker ϕ. Par factorisation on endéduit l’existence d’un morphisme surjectif ϕ : K[X]/ Im ψ −→ Im ϕ = Vu. En-fin puisque ces deux K-espaces vectoriels ont même dimension ce morphismeest aussi injectif. Cela démontre aussi que l’inclusion Im ψ ⊂ ker ϕ est enfait une égalité. En d’autre terme nous avons montré l’exactitude de la suite
0 // K[X]dψ // K[X]d
ϕ // Vu// 0
3. Avant tout il faut remarquer que les (Pi)i=si=1 sont bien les mêmes que ceux de la
question 1 : cela vient de l’isomorphie établie en question 2. Ensuite après quelquesminutes de reflection le lecteur se convaincra que le polynôme minimal de u est aussiun générateur de l’idéal annulateur du K[X]-module de torsion Vu. Cet annulateurest très facile à calculer pour un module de la forme
⊕si=1K[X]/(Pi(X)) : comme
les Pi sont ordonnés par divisibilité il s’agit de (Ps). Le polynôme minimal de u estdonc égal à Ps (à multiplication par une constante inversible près). De même on avu en question 1 que χ(X) est égal au produit des Pi(X) (à multiplication par uneconstante inversible près). En particulier le polynôme minimal divise le polynômecaractéristique : c’est le théorème de Cayley-Hamilton.
8.30 Exercice 30.
1. Soit As le module libre de rang s muni de sa base canonique {εi, i = 1, · · · , s}. Lemorphisme ψ : εi 7→ mi est bien défini surjectif et son noyau est ker ψ = ⊕i(di)εi.Soit δjs le symbole de Kronecker (c’est-à-dire δjs = 1 si j = s et δjs = 0 sinon).Le morphisme ui : εj 7→ δjsmi est bien défini. Le noyau de ce morphisme estker ui = ⊕i6=sAεi⊕ (di)εs, et comme (ds) ⊂ (di) on a ker ψ ⊂ ker ui. Par factorisationon obtient un morphisme ui : M ∼= As/ ker ψ −→ M tel que ui(mj) = δjsmi.
2. Soient ai,j des éléments de A tels que u(mi) =∑s
j=1 ai,jmj. Alors on a u(mi) =u(ui(ms)) = ui(u(ms)) puisque u commute avec ui. On en déduit u(mi) =ui(
∑sj=1 as,jmj) = ui(as,sms) = as,smi. Si on pose a = as,s on a montré que u
coïncide avec la multiplication par a sur le système générateur {mi, i = 1, · · · , s}.3. Si u est un morphisme de groupe qui commute avec tous les endomorphisme A
linéaire, alors u commute aussi avec la multiplication par λ pour tout λ de A.Autrement dit pour tout m de M et tout λ de A on a u(λm) = λu(m) et u estA-linéaire. Par la question qui précède u est la multiplication par un scalaire a ∈ A.
4. On munit V de la structure de K[X]-module Vu. Montrons l’égalité C = EndK[X](Vu).Soit v ∈ C. Alors v est K-linéaire donc est un morphisme de groupe. Soit P (X) =∑
piXi ∈ K[X] et m ∈ Vu. On a v(P (X).m) = v(P (u)(m)) = P (u)(v(m)) =
P (X).v(m). En effet comme v commute avec u il commute aussi avec tous lespolynômes en u. On a démontré l’inclusion C ⊂ EndK[X](Vu). Réciproquement siv ∈ EndK[X](Vu), alors v ∈ EndK(V ) et pour tout m ∈ V on a v(u(m)) = v(X.m) =X.v(m) = u(v(m)). On a démontré l’égalité C = EndK[X](Vu). Maintenant si f est unendomorphisme de groupe de V qui commute avec tous les éléments de C alors parla question précédente f est la multiplication par un scalaire de K[X] c’est-à-dire un
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon

69Corrigé des exercices du chapitre 2.
polynôme en u.
8.31 Exercice 31.1. Supposons u et v semblables. Alors il existe un K-endomorphisme f de V tel que
u = f ◦ v ◦ f−1 ou encore tel que u ◦ f = f ◦ v. On note ∗u et ∗v les opérationsexternes de K[X] sur respectivement Vu et Vv. En terme de K[X] modules on obtientpour tout m ∈ V l’égalité X ∗u f(m) = f(X ∗v m), puis par une récurrenceimmédiate Xn ∗u f(m) = f(Xn ∗v m) pour tout n ∈ N. Comme f est K-linéairecela suffit à montrer que f est K[X]-linéaire : f est un K[X]-isomorphisme entreVu et Vv. Réciproquement supposons que Vu et Vv soient isomorphes, et soit f unK[X] isomorphisme f : Vu −→ Vv. Pour tout m ∈ V on a f(X ∗u m) = X ∗v f(m)c’est-à-dire f(u(m)) = v(f(m)). Donc v et u sont semblables.
2. Pour 0 ≤ i ≤ n − 2 on a X X i = X i+1 et X Xn−1 = Xn =∑i=n−1
i=0 −aiX i. On endéduit que la la matrice AP est de la forme :
AP =
0 0 · · · 0 −a0
1 0 0 −a1
0 1. . . ... −a2
... . . . 0...
0 0 1 −an−1
D’après l’exercice 29 le polynôme caractéristique de uP est égal à son polynômeminimal et ils sont tous deux égaux à P (à une constante inversible près).
3. D’après la question 1 classer les endomorphismes de Kd à similitude près estéquivalent à classer les K[X]-modules de torsion de K-dimension d à isomorphismeprès. Comme ces K[X]-modules sont classifiés par leurs diviseurs élémentaires lesendomorphismes à similitude près sont classifiés par la suite des diviseurs élémentairesdu module associé. Cela donne l’existence des (Pi) et le fait qu’ils caractérisent laclasse de similitude d’un endomorphisme.
4. Soit χ(X) le polynôme caractéristique de An(λ) et µ(X) son polynôme minimal. Parune récurrence immédiate on constate que χ(X) = (X −λ)n. Donc µ(X) | (X −λ)n.Notons ε1, · · · , εn la base canonique de Kn. Sur la matrice de An(λ) on constate que(An(λ) − λid)(εi) = εi+1 si i < n (et aussi (An(λ) − λid)(εn) = 0). Il suit que sik < n (An(λ) − λ Id)k 6= 0 et donc µ(X) = χ(X) = (X − λ)n. D’après l’exercice 29les invariants de similitude P1, · · · , Ps de An(λ) vérifient Ps = µ et
∏Pi = χ. En
conséquence on a s = 1 et P1 = χ = µ = (X − λ)n. Donc An(λ) est semblable à lamatrice compagnon de (X − λ)n.
5. Soit P (X) un polynôme de K[X] dont toutes les racines sont dans K. Alors P (X) sefactorise en P (X) =
∏i=ti=1(X−λi)
ni , et par le lemme Chinois on a un isomorphisme :
K[X]
(P (X))∼=
i=t⊕i=1
K[X]
((X − λi)ni).
En terme de similitude on obtient que la matrice compagnon de P est semblable àla matrice diagonale par bloc dont les blocs sont les Ani
(λi). En général on a vu que
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon
70 Corrigé des exercices du chapitre 2
toute matrice est semblable à une matrice diagonale par bloc, chaque bloc étant lamatrice compagnon de certains polynôme (les Pi de la question 3). En raisonnantbloc diagonal par bloc diagonal on constate que si chaque Pi à toutes ses racinesdans K on peut réduire le bloc compagnon de Pi en une matrice elle-même diagonalepar bloc, chacun de blocs étant de Jordan. Comme le produit des Pi est le polynômecaractéristique de A, une condition suffisante pour qu’une matrice A soit semblablea une matrice diagonale par bloc chaque bloc étant de Jordan est que les valeurspropres de A soient toutes dans K. Si K est algébriquement clos cette condition estremplie par toute matrice.
Fin du corrigé des exercices du chapitre 2.
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon

71Chapitre 9. Corrigé des exercices du chapitre 2.
Chapitre 9
Annales.
9.1 premier devoir 04/05.Master de mathématiques Année 1 semestre 2
UV Moduleà renvoyer le lundi 28 février 2005
Exercice 1 Existe-t’il des sous-Z-modules non nuls M et N de Z tels que Z = M ⊕N ?
Exercice 2 On suppose A commutatif, soit M un A-module. Soit m ∈ M tel que pourtout α 6= 0 dans A on ait αm 6= 0.
1. Montrer que 〈m〉 est isomorphe à A.2. Montrer l’équivalence entre les assertions suivantes :
(a) 〈m〉 admet un supplémentaire dans M (c’est-à-dire il existe un sous-moduleN ⊂ M tel que M = N ⊕ 〈m〉).
(b) Il existe une forme linéaire f ∈ Hom(M, A) telle que f(m) = 1.
Exercice 3 Soit A un anneau commutatif. On note T (M) le sous-module de torsion duA-module M .
1. Soit f : M −→ N est un morphisme de A-modules. Montrer l’inclusion f(T (M)) ⊂T (N).
2. On suppose donnée une suite exacte de modules0 // M
µ // Nν // P.
Définir les morphismes de A modules et vérifier l’exactitude de la suite0 // T (M)
µ // T (N) ν // T (P ).
3. La suite de Z-modules ci dessous est exacte (le vérifier) :0 // Z x7→2x // Z x 7→x // Z/2Z // 0.
Existe-t’il une suite de Z-modules0 // T (Z) // T (Z) // T (Z/2Z) // 0 ? pourquoi ?
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon
72 Annales.
9.2 solution du premier devoir 04/05.Master de mathématiques Année 1 semestre 2
UV Module : solution du premier devoir.
Exercice 1 Soit M et N deux sous-modules non nuls de Z, et soit m ∈ M et n ∈ N nonnuls. Alors 0 6= mn ∈ M ∩N . Donc Z n’admet pas de facteurs directs non triviaux.
Exercice 21. Par définition du sous-module engendré le morphisme a 7→ a.m est une surjection de
A sur 〈m〉. Puisque l’annulateur de m est trivial cette surjection est un isomorphisme.2. Supposons (a), c’est-à-dire que M = N ⊕ 〈m〉. Soit ϕ : 〈m〉 −→ A l’isomorphisme
de la question précédente (défini par ϕ(a.m) = a), et ψ : N −→ A le morphismenul. Alors le morphisme f = ψ ⊕ ϕ : N ⊕ 〈m〉 −→ A est une forme linéaire vérifiantf(m) = 1.Réciproquement supposons (b) et soit g : A −→ 〈m〉 l’isomorphisme g(a) = a.m.Alors on a f ◦ g = IdA. Et de même que dans l’exercice 20 on en déduit l’égalitéM = ker f ⊕ 〈m〉.
Exercice 31. Soit m ∈ T (M). Alors il existe λ ∈ A tel que λ 6= 0 et λm = 0. Il suit
λf(m) = f(λm) = 0, avec λ 6= 0. Donc f(m) ∈ T (N) et f(M) ⊂ T (N).2. Par le 1 les restrictions de µ et ν définissent des morphismes µ′ : T (M) −→ T (N)
et ν ′ : T (N) −→ T (P ). Naturellement µ′ reste injectif et on a ν ′ ◦ µ′ = 0 c’est-à-dire Im µ′ ⊂ ker ν ′. Réciproquement soit n ∈ ker ν ′. Alors n ∈ ker ν ∩ T (N),et il existe donc m ∈ M tel que µ(m) = n et aussi λ 6= 0 tel que λn = 0.Il suit 0 = λµ(m) = µ(λm) et comme µ est injectif on a λm = 0. On adonc m ∈ T (M) et µ′(m) = n. Donc n ∈ Im µ′. Cela démontre que la suite
0 // T (M)µ′ // T (N) ν′ // T (P ) est exacte.
3. Comme Z est intègre l’application x 7→ 2x est injective, et son image est bien entenduégale à 2Z qui est le noyau de la surjection Z −→ Z/2Z. ce qui montre que la suiterequise est exacte.On a T (Z) = 0 et T (Z/2Z) = Z/2Z 6= 0. Si il existait une suite
0 // T (Z) // T (Z) // T (Z/2Z) // 0 ,
on aurait Z/2Z = 0 ce qui est absurde.
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon

73Chapitre 9. Corrigé des exercices du chapitre 2.
9.3 deuxième devoir 04/05.Master de mathématiques Année 1 semestre 2
UV Module : deuxième devoir.
à renvoyer le lundi 18 avril 2005
Exercice 1 Soit A un anneau principal. Pour tout A-module M et tout irréductible pde A, on appelle sous-module p-primaire de M et note Tp(M) l’ensemble Tp(M) = {m ∈M ;∃n ∈ N pnm = 0}. On fixe un système de représentant P des irréductibles dans A. Onveut démontrer l’égalité
T (M) =⊕p∈P
Tp(M).
1. Montrer que pour tout p et tout M l’ensemble Tp(M) est un sous-module de M .2. Soit
a = u∏p∈P
pep ∈ A avec u ∈ A× .
Montrer que(
A
(a)
)∼=
⊕p∈P
A
(pep)et en déduire
A
(a)=
⊕p∈P
Tp
(A
(a)
).
3. conclure.
Exercice 2 En utilisant la classification des Z-modules et la décomposition p-primaire del’exercice 1, donner la liste complète à isomorphisme près des groupes d’ordre 400.
Exercice 3 Soit N le sous-Z-module de Z4 engendré par les quatres vecteurs (1, 1,−1, 1),(1, 3,−3, 1), (1, 1, 5, 1) et (1, 1,−7, 7). Donner la structure de Z4/N et une base de Z4
adaptée à N .
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon

74 Annales.
9.4 solution du deuxième devoir 04/05.Master de mathématiques Année 1 semestre 2
UV Module : solution du deuxième devoir.
Exercice 11. Soient λ, µ ∈ A et x, y ∈ Tp(M). Alors il existe n ∈ N tel que pnx = pny = 0. Il suit
pn(λx + µy) = λpnx + µpny = 0. Donc λx + µy ∈ Tp(M) et cet ensemble est bien unsous-module de M .
2. Le premier isomorphisme n’est rien d’autre que le lemme Chinois. En utilisant cetisomorphisme il reste à démontrer que
⊕p∈P
A
(pep)=
⊕q∈P
Tq
(⊕p∈P
A
(pep)
).
Pour pouvoir conclure il suffit de montrer l’égalité (après identification deA
(qeq)avec
son image dans la somme directe) :
Tq
(⊕p∈P
A
(pep)
)=
A
(qeq).
Trivialement qeqA
(qeq)= 0 d’où l’inclusion
A
(qeq)⊂ Tq
(⊕p∈P
A
(pep)
). Réciproquement
soit x = (xp)p∈P ∈ Tq
(⊕p∈P
A
(pep)
). Alors il existe n ∈ N tel que qnx = 0. Pour
montrer que x ∈ A
(qeq)on doit voir que xp = 0 pour tout p 6= q. Mais si p 6= q
alors grâce à une relation de Bezout on sait que qn est inversible modulo pep et doncqnxp = 0 entraîne xp = 0. D’où l’égalité attendue.
3. Par le théorème de classification T (M) est somme directe interne de modules dela forme A/(a). Par la question qui précède ces facteurs sont sommes directesinternes de leurs sous-modules p-primaires. En regroupant les parties p-primaires(par commutativité de la somme directe) on obtient bien
T (M) =⊕p∈P
Tp(M).
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon
75Chapitre 9. Corrigé des exercices du chapitre 2.
Exercice 2 On factorise 400 = 24 × 52. Soit G un groupe abélien d’ordre 400. Alors parl’exercice 1 G = T2(G) ⊕ T5(G) et on a #T2(G) = 24 et #T5(G) = 52. En utilisant lethéorème de classification, on dresse la liste complète des groupes abéliens d’ordre 24 etdes groupes abéliens d’ordre 52. En combinant ces deux listes on obtient alors la listecomplète sans répétition des groupes abéliens d’ordre 400.
– liste des groupes abélien d’ordre 25 : Soit H abélien un groupe d’ordre 25 et soitd1 | d2 · · · | dr les diviseurs élémentaires de H. Alors comme
∏i di = 25 on a seulement
deux possibilités, r = 2 et d1 = d2 = 5 ou r = 1 et d1 = 25. A isomorphismes prèsles deux seuls groupes abéliens d’ordre 25 sont donc Z/5Z⊕ Z/5Z et Z/25Z.
– liste des groupes abélien d’ordre 16 : Soit H un groupe abélien d’ordre 16 et d1 | d2 |· · · | dr les diviseurs élémentaires de H. Alors comme
∏i di = 24 le nombre r est
compris entre 1 et 4. Pour r = 1 la seule possibilité est d1 = 16. Pour r = 2 lesdeux seules possibilités sont d1 = 2 et d2 = 8 ou bien d1 = d2 = 4. Pour r = 3la seule possibilité est d3 = 4 et d1 = d2 = 2. Pour r = 4 la seule possibilité estd1 = d2 = d3 = d4 = 2. A isomorphismes près il existe exactement 5 groupes d’ordre16 à savoir : (Z/2Z)4 ; (Z/2Z)2 ⊕ Z/4Z ; (Z/4Z)2 ; Z/2Z⊕ Z/8Z ; et Z/16Z.
– liste des groupes abélien d’ordre 400 : A isomorphismes près il existe exactement 10groupes d’ordre 400 dont la liste (sous la forme canonique du théorème des diviseursélémentaires) suit : Z/400Z ; Z/2Z⊕Z/200Z ; Z/4Z⊕Z/100Z ; (Z/2Z)2⊕Z/100Z ;(Z/2Z)3⊕Z/50Z ; Z/5Z⊕Z/80Z ; Z/10Z⊕Z/40Z ; Z/20Z⊕Z/20Z ; Z/2Z⊕Z/10Z⊕Z/20Z ; et (Z/2Z)2 ⊕ (Z/10Z)2.
Exercice 3 On applique l’algorithme de Smith à la matrice déduite des générateurs deN . On obtient :
1 1 1 11 3 1 1−1 −3 5 −71 1 1 7
XYZT
C2 ← C2 − C1
C3 ← C3 − C1
C4 ← C4 − C1
∼
1 0 0 01 2 0 0−1 −2 6 −61 0 0 6
XYZT
∼
1 0 0 00 2 0 00 −2 6 −60 0 0 6
X−X + YX + Z−X + T
∼
1 0 0 00 2 0 00 0 6 −60 0 0 6
X−X + YY + Z−X + T
C4 ← C4 + C3
∼
1 0 0 00 2 0 00 0 6 00 0 0 6
X−X + YY + Z−X + T
On en déduit Z4/N ' Z/Z⊕ Z/2Z⊕ Z/6Z⊕ Z/6Z ' Z/2Z⊕ Z/6Z⊕ Z/6Z et la matriceG provenant des opérations sur les lignes effectuées se déduit des polynômes de la dernièrecolonne.
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon
76 Annales.
On a
G =
1 0 0 0−1 1 0 00 1 1 0−1 0 0 1
et G−1 =
1 0 0 01 1 0 0−1 −1 1 01 0 0 1
.
D’après le cours la Z-base de Z4 formée des vecteurs ε1, ε2, ε3, ε4 qui suivent est une baseadaptée à N .
ε1 =
11−11
; ε2 =
01−10
; ε3 =
0010
; ε4 =
0001
.
Comme conseillé dans le cours on vérifie que les diεi sont bien des éléments de N :
ε1 = (1, 1,−1, 1) ∈ N
2ε2 = (1, 3,−3, 1)− (1, 1,−1, 1) ∈ N
6ε3 = (1, 1, 5, 1)− (1, 1,−1, 1) ∈ N
6ε4 = (1, 1,−7, 7) + (1, 1, 5, 1)− 2(1, 1,−1, 1) ∈ N
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon
77Chapitre 9. Corrigé des exercices du chapitre 2.
9.5 Épreuve principale première session 2005.Master de mathématiques Année 1 semestre 2
session de juin 2005
UV Module
Épreuve principale
Les documents, calculatrices et téléphones portables sont interdits.
Exercice 1 Dresser la liste à isomorphisme près et sans répétition des groupes abéliensd’ordre 72.
Exercice 2 Soit A un anneau unitaire. Soient M et N deux A-modules. Montrer qu’ilexiste deux suites exactes 0 −→ M −→ M ⊕N −→ N −→ 0 et 0 −→ N −→ M ⊕N −→M −→ 0.
Exercice 3 Soit R le sous-Z-module de Z4 engendré par les vecteurs colonnes de la matrice
R =
1 1 1 11 2 1 12 2 4 121 1 1 11
.
Donner la structure de Z4/R et une base adaptée à R.
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon

78 Annales.
9.6 Solution de l’épreuve principale première session2005.
Master de mathématiques Année 1 semestre 2
session de juin 2005
UV Module
Solution de l’épreuve principale
Exercice 1 Soit G un tel groupe. Partant de 72 = 23 32, on sait que G = T2(G)⊕ T3(G),avec o(T2(G)) = 23 et o(T3(G)) = 32. En utilisant la classification on sait qu’il y a (àisomorphisme près) 3 groupes abéliens d’ordre 8 (à savoir Z/8Z, Z/2Z⊕Z/4Z, et (Z/2Z)3) ;et 2 groupes abéliens d’ordre 9 (à savoir Z/9Z et Z/3Z ⊕ Z/3Z). En combinant ces deuxlistes on conclut à la liste de 6 groupes abéliens d’ordre 72 ci-dessous :
G1 = Z/72Z G2 = Z/3⊕ Z/24Z
G2 = Z/2Z⊕ Z/36Z G4 = Z/6Z⊕ Z/12Z
G5 = Z/2Z⊕ Z/2Z⊕ Z/18Z G6 = Z/2Z⊕ Z6Z⊕ Z/6Z
Exercice 2 Dans cette solution la notation M ⊕ N désigne le somme directe externe,on pouvait aussi considérer les sommes directes internes, d’après le cours ces deuxnotions coïncident. En utilisant l’isomorphie naturelle M ⊕ N ∼= N ⊕ M obtenue avec(m,n) 7→ (n,m) il suffit par symétrie de montrer l’existence de la première suite exacte.On définit ı : M −→ M ⊕ N avec ı(m) = (m, 0) et ρ : M ⊕ N −→ N par ρ(m,n) = n.Manifestement ı est injective, ρ est surjective et ker ρ = {(m,n) ∈ M ⊕N |n = 0} = Im ı.Cela établit l’exactitude de la suite :
0 // Mı // M ⊕N
ρ // N // 0
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon
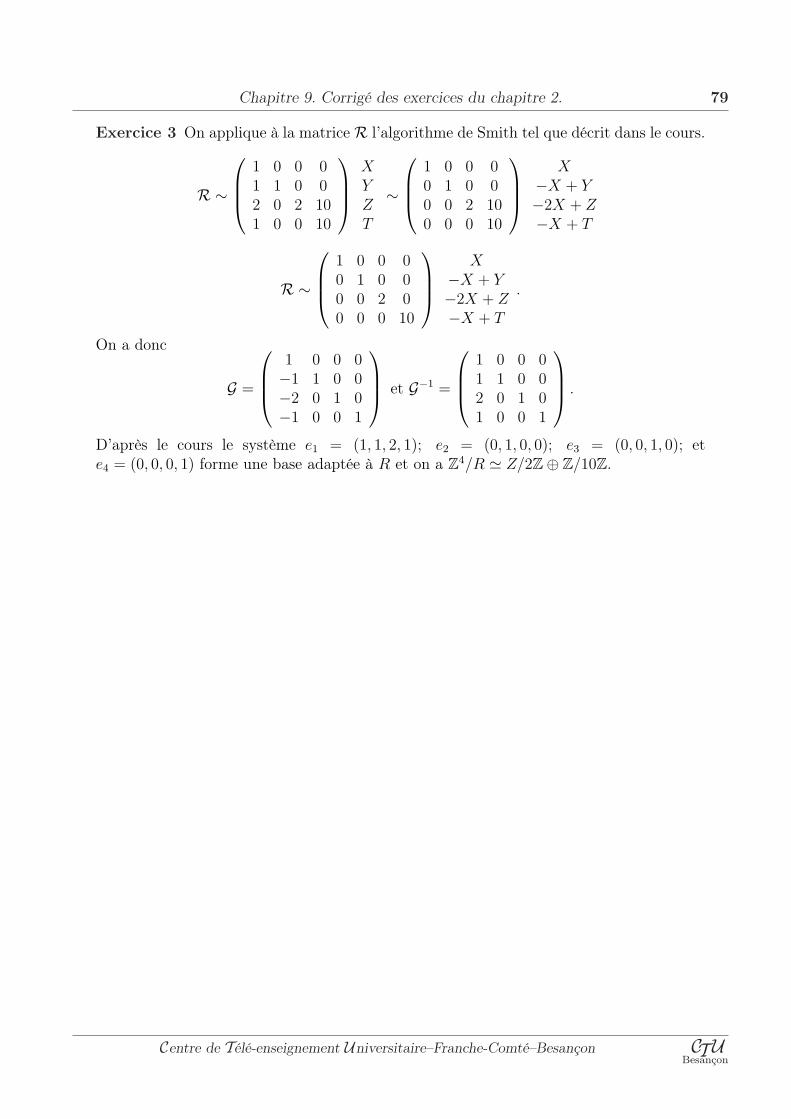
79Chapitre 9. Corrigé des exercices du chapitre 2.
Exercice 3 On applique à la matrice R l’algorithme de Smith tel que décrit dans le cours.
R ∼
1 0 0 01 1 0 02 0 2 101 0 0 10
XYZT
∼
1 0 0 00 1 0 00 0 2 100 0 0 10
X−X + Y−2X + Z−X + T
R ∼
1 0 0 00 1 0 00 0 2 00 0 0 10
X−X + Y−2X + Z−X + T
.
On a donc
G =
1 0 0 0−1 1 0 0−2 0 1 0−1 0 0 1
et G−1 =
1 0 0 01 1 0 02 0 1 01 0 0 1
.
D’après le cours le système e1 = (1, 1, 2, 1); e2 = (0, 1, 0, 0); e3 = (0, 0, 1, 0); ete4 = (0, 0, 0, 1) forme une base adaptée à R et on a Z4/R ' Z/2Z⊕ Z/10Z.
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon

80 Annales.
9.7 Épreuve complémentaire première session 2005.Master de mathématiques Année 1 semestre 2
session de juin 2005
UV Module
Épreuve complémentaire
Les documents, calculatrices et téléphones portables sont interdits.
Exercice 1 Dans M2(Z) les matrices A =
(15 00 42
)et B =
(30 00 21
)sont elles
semblables ?
Exercice 2 Soit a ∈ Z un entier et soit d le pgcd de a et 12 et soit a′ tel que a = da′. SoitR la matrice de M3(Z) suivante
R =
2 6 00 a 04 0 a
.
1. Calculer le déterminant de R.
2. Montrer que(
a 0−12 a
)et
(d 00 aa′
)sont semblables.
3. Soit R le sous-Z-module de Z3 engendré par les vecteurs colonnes de la matrice R.Montrer que Z3/R est isomorphe à Z/2Z⊕ Z/dZ⊕ Z/aa′Z.
4. Donner (suivant la parité de a) les diviseurs élémentaires de Z3/R.
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon

81Chapitre 9. Corrigé des exercices du chapitre 2.
9.8 Solution de l’épreuve complémentaire première ses-sion 2005.
Master de mathématiques Année 1 semestre 2
session de juin 2005
UV Module
Solution de l’épreuve complémentaire
Exercice 1 Par le théorème chinois on a des isomorphismes :
Z/15Z⊕ Z/42Z ∼= Z/15Z⊕ Z/2Z⊕ Z/21Z ∼= Z/30Z⊕ Z/21Z.
Les deux matrices présentent donc des modules isomorphes : elles sont semblables.
Exercice 21. detR = 2a2.
2. Par le théorème de classification on sait a priori que la matrice A =
(a 0−12 a
)
est semblable à une matrice diagonale D =
(α 00 β
)telle que (i) le pivot α soit
le p.g.c.d. positif des coefficients de A et (ii) det(A) = det(B). Il suit α = d etβ = a2/d = aa′.
3. En effectuant sur R l’opération élémentaire C2 ← C2 − 3C1 on obtient la matrice
R ∼
2 0 00 a 00 −12 a
. Avec 2 on en déduit : R ∼
2 0 00 d 00 0 aa′
.
Cela donne l’isomorphie annoncée.4. D’après 3, on sait que Z3/R ∼= Z/2Z ⊕ Z/dZ ⊕ Z/aa′Z. Si 2 divise a alors 2 divise
d qui divise aa′ et donc la suite des invariants de similitude de Z3/R est (2, d, aa′).Si 2 ne divise pas a, alors par le lemme Chinois et commutativité de ⊕ on obtientZ3/R ∼= Z/d⊕Z/2aa′ et comme d divise 2aa′ la suite des invariants de similitude deZ3/R est (d, 2aa′).
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon

82 Annales.
9.9 Épreuve principale deuxième session 2005.Master de mathématiques Année 1 semestre 2
session d’août 2005
UV Module
Épreuve principaleExercice 1 Dresser la liste à isomorphisme près et sans répétition des groupes abéliensd’ordre 500 = 22 × 53.
Exercice 2 Soit V un espace vectoriel sur un corps commutatif K.1. Soit f ∈ EndK(V ). Justifier que l’application ci-dessous définie munit V d’une
structure de K[X]-module. Dans la suite on notera Vf ce module.
K[X]× V // V
(∑i=n
i=0 aiXi, v)
 // ∑i=ni=0 aif
i(v)
2. Soient f et g deux endomorphismes K-linéaires de V . On dit que f est semblableà g et on note f ∼ g lorsqu’il existe un automorphisme K-linéaire α de V tel quef = α−1 ◦ g ◦α. Montrer que f est semblable à g si et seulement si les modules Vf etVg sont isomorphes.
Exercice 3 Soit R le sous-Z-module de Z4 engendré par les vecteurs colonnes de la matrice
R =
8 12 6 47 12 6 55 10 12 72 10 6 10
.
Donner la structure de Z4/R et une base adaptée à R.
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon
83Chapitre 9. Corrigé des exercices du chapitre 2.
9.10 Solution de l’épreuve principale deuxième session2005.
Master de mathématiques Année 1 semestre 2
session d’août 2005
UV Module
Solution de l’épreuve principale
Exercice 1 Voir l’exercice 1 de l’épreuve principale de la première session 2005 (enremplaçant le couple ordonné de nombre premier (2,3) par (5,2)).
Exercice 21. Voir l’exercice 14 du cours.2. Voir la première question de l’exercice 31 du cours.
Exercice 3 Voir l’exemple détaillé du cours et tous les exercices similaires, par exemplele troisième exercice de l’épreuve principale de la première session.
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon

84 Annales.
9.11 Épreuve complémentaire deuxième session 2005.Master de mathématiques Année 1 semestre 2
session de juin 2005
UV Module
Épreuve complémentaire
Les documents, calculatrices et téléphones portables sont interdits.
Exercice 1 Soit A = {a+ b√
7; a, b ∈ Z}, on note A× le groupe (multiplicatif) formé deséléments inversibles dans A de A.
1. Montrer que A est un sous-anneau de R.2. Soit x = a + b
√7 ∈ A. Montrer l’équivalence x ∈ A× ⇐⇒ a2 − 7b2 = ±1.
3. Montrer que A× est infini (on pourra vérifier puis utiliser 8 + 3√
7 ∈ A×).
Exercice 2 Soit R le sous-Q[X]-module de Q[X]3 engendré par les vecteurs colonnes dela matrice
R =
3X − 1 −2X 3X − 1X2 − 1 0 2X2 − 2
X2 − 11X + 3 7X 2X2 − 11X + 2
.
Donner la structure de Q[X]3/R. On ne précisera pas de base adapté et il n’est pasforcément utile de finir l’algorithme de Smith.
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon

85Chapitre 9. Corrigé des exercices du chapitre 2.
9.12 Solution de l’épreuve complémentaire deuxièmesession 2005.
Master de mathématiques Année 1 semestre 2
session de juin 2005
UV Module
Solution de l’épreuve complémentaire.
Exercice 11. Clairement A ⊂ R et 1 ∈ A. On vérifie immédiatement que A est stable par l’addition
et le passage à l’inverse additif. Si x = a + b√
7 ∈ A et x′ = a′ + b′√
7 ∈ A, alorsxx′ = ((aa′+ tbb′)+(ab′+a′b)
√7) appartient encore à A. Donc A est un sous-anneau
de R.2. On définit N : A −→ Z par la formule N(a + b
√7) = (a + b
√7)(a− b
√7) = a2− 7b2.
On vérifie facilement que N est multiplicative. Il suit que si x = a+b√
7 est inversibledans A alors N(x) est inversible dans Z c’est-à-dire égal à plus ou moins 1, etréciproquement que si N(x) = ±1, alors ±(a− b
√7) est un inverse à x dans A.
3. Le nombre x = 8 + 3√
7 vérifie N(x) = 1 donc est inversible dans A. D’autre parton a x > 1 et donc pour tout n entier xn > 1. En particulier l’ordre multiplicatif dex est infini et donc A× contient le sous-groupe isomorphe à Z engendré par x qui estinfini.
Exercice 2 On réduit la matrice R. On obtient
R ∼
3X − 1 −2X 0X2 − 1 0 X2 − 1
X2 − 11X + 3 7X X2 − 1
∼
3X − 1 −2X 00 0 X2 − 1
−11X + 4 7X X2 − 1
∼
3X − 1 −2X 00 0 X2 − 1
−11X + 4 7X 0
∼
X2 − 1 0 00 3X − 1 −2X0 −11X + 4 7X
.
Centre de Télé-enseignement Universitaire–Franche-Comté–Besançon C UTBesançon

86 Annales.
A ce stade on voit que Q[X]3/R est isomorphe à la somme directe de Q[X]/(X2− 1) avecle module correspondant à la sous-matrice carré
R′ =(
3X − 1 −2X−11X + 4 7X
).
Les invariants de similitude de cette matrice se calculent facilement : le pgcd des coefficientest 1 et le second invariant est donc égal au déterminant qui vaut X(1 −X). On obtientainsi l’isomorphie :
Q[X]3/R ∼= Q[X]/(X2 − 1)⊕
Q[X]/(X(1−X)).
Centre de Télé-enseignement Universitaire–Franche-Comté–BesançonC UTBesançon


















