
GK, Intro 1Hofstra University – CSC171A1 Computer Graphics Gerda Kamberova.
CS5620
Intro to Computer Graphics
Copyright
C. Gotsman, G. Elber, M. Ben-Chen
Computer Science Dept., Technion
Geometric Modeling II
Page 1
Geometric
Modeling
Part II
2
Physical Splines Curve design pre-computers
3 4
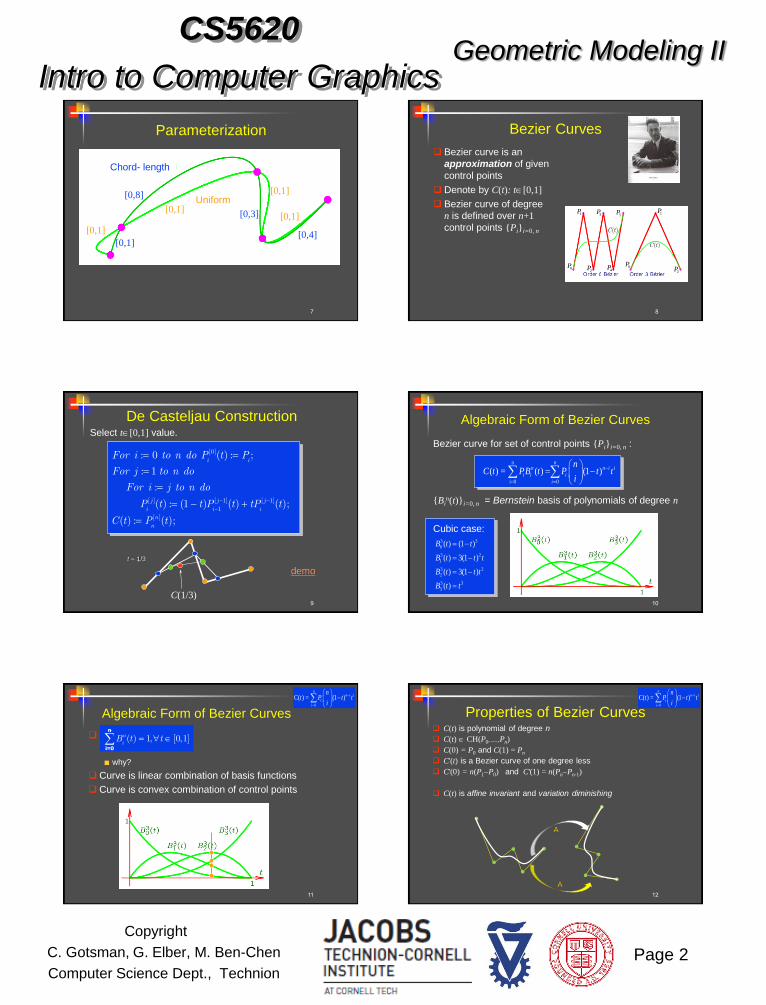
Cubic Splines
Standard spline input – set of points {Pi}i=0, n
No derivatives’ specified as input
Interpolate by n cubic segments (4n DOF):
Force C1 and C2 continuity at points
Solve 4n linear equations in 4n unknowns
Interpolation (2 equations):
C continuity constraints ( equations):
C continuity constraints ( equations):
1
2
n
C P C P i n
n
C C i n
n
C C i n
i i i i
i i
i i
( ) ( ) ,..,
( ) ( ) ,..,
( ) ( ) ,..,
' '
' ' ' '
0 1 1
1
1 0 1 1
1
1 0 1 1
1
1
1
1( )iC t 0t
1t
( )iC t0t
1t
1iP
iP
5
Cubic Splines
Have two degrees of freedom left (to reach 4n DOF)
Options
Natural end conditions: C1''(0) = 0, Cn''(1) = 0
Complete end conditions: C1'(0) = 0, Cn'(1) = 0
Prescribed end conditions (derivatives available at the ends):
C1'(0) = T0, Cn'(1) = Tn
Periodic end conditions
C1'(0) = Cn'(1), C1''(0) = Cn''(1),
Question: What parts of C(t) are affected as a result of a change in
Pi ?
prescribed
natural
demo
Basis functions should be local 6
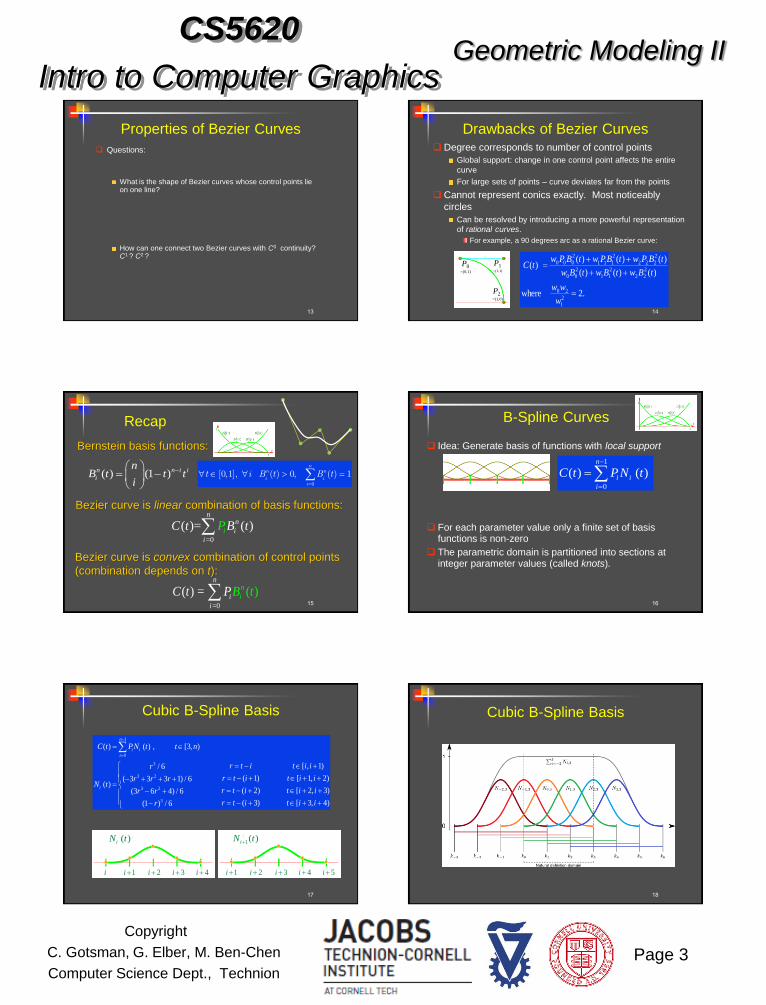
The assumption t [0,1] (uniform parameterization)
is arbitrary
Implicitly implies same curve “length” for each segment
Not natural if points are not equally spaced
One alternative - chord-length parameterization:
Parameterization
].,0[ :segmentth ' For the
)()( Denote 2
1
2
1
i
y
i
y
i
x
i
x
ii
dti
PPPPd
CS5620
Intro to Computer Graphics
Copyright
C. Gotsman, G. Elber, M. Ben-Chen
Computer Science Dept., Technion
Geometric Modeling II
Page 2
7
Parameterization
Uniform
Chord- length
[0,1]
[0,1]
[0,8]
[0,1]
[0,3]
[0,1]
[0,1]
[0,4]
8
Bezier Curves
Bezier curve is an
approximation of given
control points
Denote by C(t): t[0,1]
Bezier curve of degree
n is defined over n+1
control points {Pi}i=0, n
P1 P3 5P P1
P2
P0P0 P2P4
( )C t
( )C t
9
De Casteljau Construction
[0]
[ ] [ 1] [ 1]
1[ ]
: 0 ( ) : ;
: 1
:
( ) : (1 ) ( ) ( );
( ) : ( );
i i
j j j
i i in
n
For i to n do P t P
For j to n do
For i j to n do
P t t P t tP t
C t P t
C(1/3)
Select t[0,1] value.
t = 1/3
demo
10
Algebraic Form of Bezier Curves
Bezier curve for set of control points {Pi}i=0, n :
{Bin(t)}i=0, n = Bernstein basis of polynomials of degree n
Cubic case:
n
i=0 0
( ) = ( ) (1 )
nn n i i
i i i
i
nC t PB t P t t
i
3 3
0
3 2
1
3 2
2
3 3
3
( ) (1 )
( ) 3(1 )
( ) 3(1 )
( )
B t t
B t t t
B t t t
B t t
11
Algebraic Form of Bezier Curves
why?
Curve is linear combination of basis functions
Curve is convex combination of control points
n
i=0
( ) 1, [0,1]n
iB t t
0
C( ) = (1 )
nn i i
i
i
nt P t t
i
12
Properties of Bezier Curves C(t) is polynomial of degree n
C(t) CH(P0,…,Pn)
C(0) = P0 and C(1) = Pn
C'(t) is a Bezier curve of one degree less
C'(0) = n(P1P0) and C'(1) = n(PnPn-1)
C(t) is affine invariant and variation diminishing
A
A
0
C( ) = (1 )
nn i i
i
i
nt P t t
i
CS5620
Intro to Computer Graphics
Copyright
C. Gotsman, G. Elber, M. Ben-Chen
Computer Science Dept., Technion
Geometric Modeling II
Page 3
13
Properties of Bezier Curves
Questions:
What is the shape of Bezier curves whose control points lie on one line?
How can one connect two Bezier curves with C0 continuity? C1 ? C2 ?
14
Drawbacks of Bezier Curves Degree corresponds to number of control points
Global support: change in one control point affects the entire
curve
For large sets of points – curve deviates far from the points
Cannot represent conics exactly. Most noticeably
circles
Can be resolved by introducing a more powerful representation
of rational curves.
For example, a 90 degrees arc as a rational Bezier curve:
.2where
)()()(
)()()()(
2
1
20
2
22
2
11
2
00
2
222
2
111
2
000
w
ww
tBwtBwtBw
tBPwtBPwtBPw tCP0
=(0,1)
P1 =(1,1)
P2 =(1,0)
Recap
15
=0
( )= ( )n
n
ii
i
B tPC t
Bezier curve is linear combination of basis functions:
( ) (1 )
n n i i
i
nB t t t
i
Bezier curve is convex combination of control points
(combination depends on t):
=0
( ) = ( ) n
i
n
i
i
C B tt P
Bernstein basis functions:
0
[0,1], ( ) 0, ( ) 1n
n n
i ii
t i B t B t
16
B-Spline Curves
Idea: Generate basis of functions with local support
For each parameter value only a finite set of basis functions is non-zero
The parametric domain is partitioned into sections at integer parameter values (called knots).
1
0
)()(n
i
ii tNPtC
17
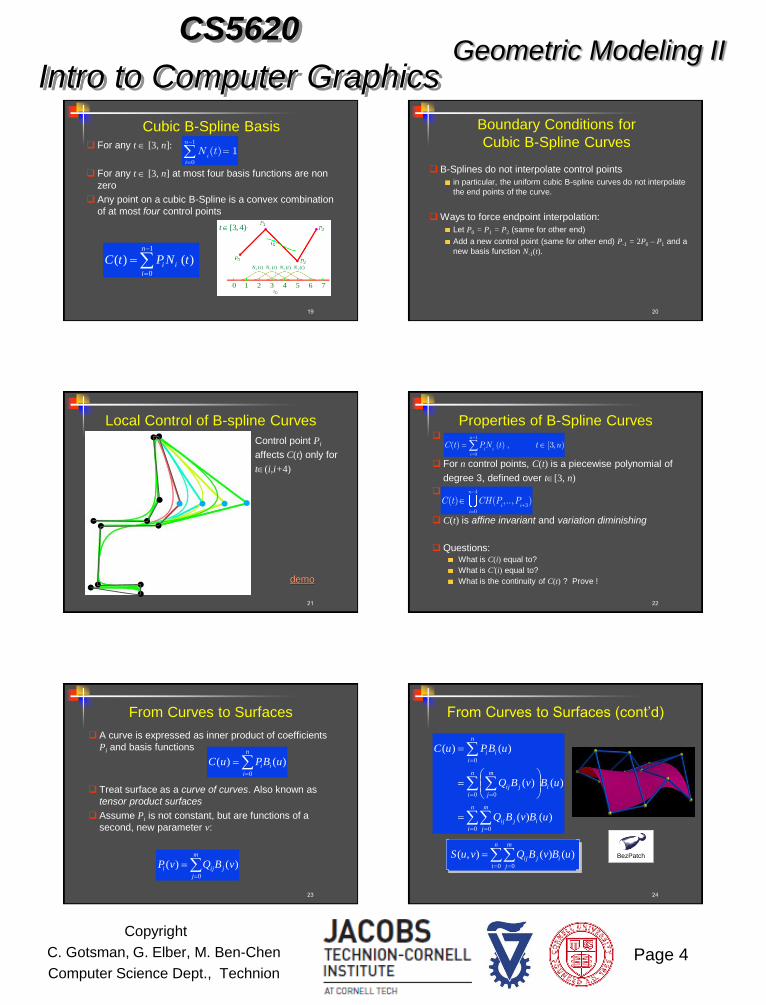
Cubic B-Spline Basis
1
0
3
3 2
3 2
3
( ) ( ) , [3, )
[ , 1)/ 6
( 1) [ 1, 2)( 3 3 3 1) / 6( )
( 2) [ 2, 3)(3 6 4) / 6
( 3) [ 3, 4)(1 ) / 6
n
i i
i
i
C t PN t t n
r t i t i ir
r t i t i ir r rN t
r t i t i ir r
r t i t i ir
3( )iN t
1 2 3 4i i i i i
3
1( )iN t
1 2 3 4 5i i i i i
Cubic B-Spline Basis
18
CS5620
Intro to Computer Graphics
Copyright
C. Gotsman, G. Elber, M. Ben-Chen
Computer Science Dept., Technion
Geometric Modeling II
Page 4
19
Cubic B-Spline Basis For any t [3, n]:
For any t [3, n] at most four basis functions are non
zero
Any point on a cubic B-Spline is a convex combination
of at most four control points
1
0
( ) 1n
ii
N t
1
0
)()(n
i
ii tNPtC
[3,4)t
0 1 2 3 4 5 6 7
3 3 3 3
0 1 2 3( ) ( ) ( ) ( )N t N t N t N t
20
B-Splines do not interpolate control points
in particular, the uniform cubic B-spline curves do not interpolate
the end points of the curve.
Ways to force endpoint interpolation:
Let P0 = P1 = P2 (same for other end)
Add a new control point (same for other end) P-1 = 2P0 – P1 and a
new basis function N-1(t).
Boundary Conditions for
Cubic B-Spline Curves
21
Local Control of B-spline Curves
Control point Pi
affects C(t) only for
t(i,i+4)
demo
22
Properties of B-Spline Curves
For n control points, C(t) is a piecewise polynomial of
degree 3, defined over t[3, n)
C(t) is affine invariant and variation diminishing
Questions: What is C(i) equal to?
What is C’(i) equal to?
What is the continuity of C(t) ? Prove !
4
30
( ) ( ,.., )n
i ii
C t CH P P
1
0
( ) ( ) , [3, )n
i ii
C t PN t t n
23
From Curves to Surfaces
A curve is expressed as inner product of coefficients
Pi and basis functions
Treat surface as a curve of curves. Also known as
tensor product surfaces
Assume Pi is not constant, but are functions of a
second, new parameter v:
n
i
ii uBPuC0
)()(
m
j
jiji vBQvP0
)()(
24
From Curves to Surfaces (cont’d)
n
i
i
m
j
jij
n
i
i
m
j
jij
n
i
ii
uBvBQ
uBvBQ
uBPuC
0 0
0 0
0
)()(
)()(
)()(
n
i
i
m
j
jij uBvBQvuS0 0
)()(),( BezPatch
CS5620
Intro to Computer Graphics
Copyright
C. Gotsman, G. Elber, M. Ben-Chen
Computer Science Dept., Technion
Geometric Modeling II
Page 5
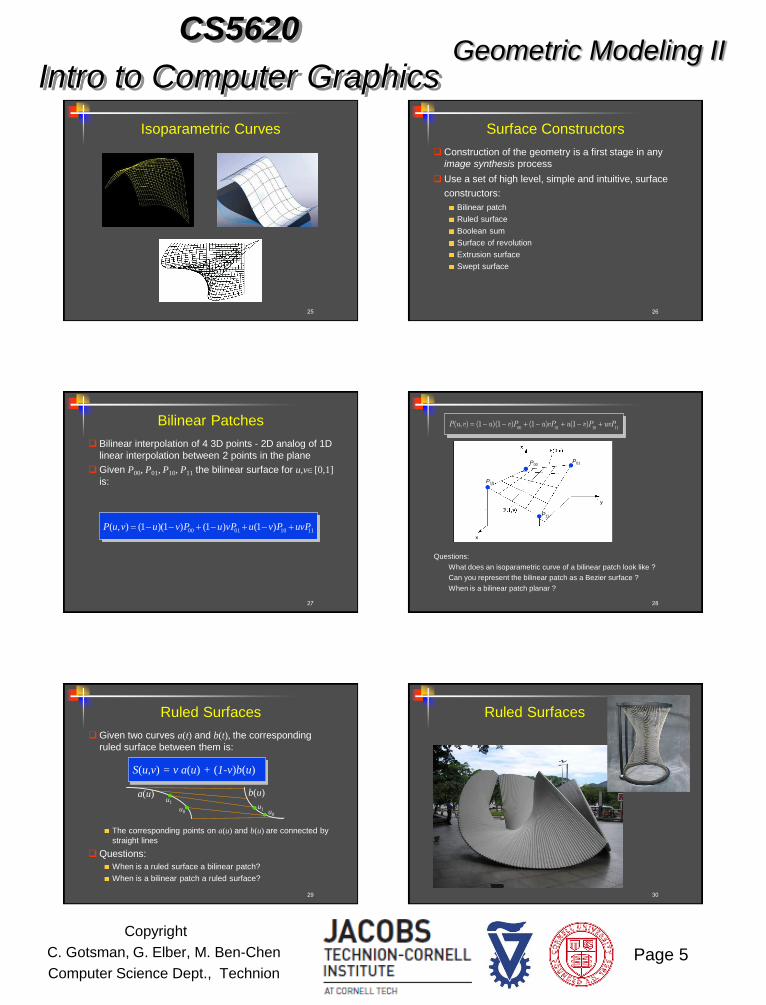
Isoparametric Curves
25 26
Surface Constructors
Construction of the geometry is a first stage in any
image synthesis process
Use a set of high level, simple and intuitive, surface
constructors:
Bilinear patch
Ruled surface
Boolean sum
Surface of revolution
Extrusion surface
Swept surface
27
Bilinear Patches
Bilinear interpolation of 4 3D points - 2D analog of 1D
linear interpolation between 2 points in the plane
Given P00, P01, P10, P11 the bilinear surface for u,v[0,1]
is:
11100100 )1()1()1)(1(),( uvPPvuvPuPvuvuP
28
P10 P11
P00
P10
P01
x
y
Questions:
What does an isoparametric curve of a bilinear patch look like ?
Can you represent the bilinear patch as a Bezier surface ?
When is a bilinear patch planar ?
00 01 10 11( , ) (1 )(1 ) (1 ) (1 )P u v u v P u vP u v P uvP
29
Given two curves a(t) and b(t), the corresponding
ruled surface between them is:
The corresponding points on a(u) and b(u) are connected by
straight lines
Questions:
When is a ruled surface a bilinear patch?
When is a bilinear patch a ruled surface?
Ruled Surfaces
S(u,v) = v a(u) + (1-v)b(u)
a(u) b(u)
u0
u1
u0
u1
Ruled Surfaces
30

CS5620
Intro to Computer Graphics
Copyright
C. Gotsman, G. Elber, M. Ben-Chen
Computer Science Dept., Technion
Geometric Modeling II
Page 6
Bridge of Strings
31 32
Boolean Sum
Given four connected curves i i=1,2,3,4, Boolean sum
S(u, v) fills the interior.
Then
)()1()(),(
)()1()(),(
)1(
)1()1)(1(),(
312
201
1110
0100
vuvuvuS
uvuvvuS
uvPPvu
vPuPvuvuP
),(),(),(),( 21 vuPvuSvuSvuS
33
Boolean Sum (cont’d)
S(u,v) interpolates the four
i along its boundaries.
For example, consider the
u = 0 boundary:
)(
)1()()1(
)1()(1)(0)0()1()0(
),0(),0(),0(
),0(
3
010030001
01003120
21
v
vPPvvPvvP
vPPvvvvv
vPvSvS
vS
34
Surface of Revolution Rotate a, usually planar,
curve around an axis
Consider curve
(t) = (x(t), 0, z(t))
and let Z be the axis of
revolution.
( , ) ( ) cos( ),
( , ) ( )sin( ),
( , ) ( ).
x
x
z
x u v u v
y u v u v
z u v u
(t)
Surfaces of Revolution
35 36
Extruded Surface
Extrusion of a, usually
planar, curve along a
linear segment.
Given curve (t) and
vector
( , ) ( )S u v u vV
(t) (t)
V
VV

CS5620
Intro to Computer Graphics
Copyright
C. Gotsman, G. Elber, M. Ben-Chen
Computer Science Dept., Technion
Geometric Modeling II
Page 7
37
Sweeped Surface Rigid motion of one (cross section) curve along another
(axis) curve:
The cross section may change as it is swept
Question: Is an extrusion a special case of a sweep?
a surface of revolution?


















