CS 8520: Artificial Intelligence Robotics Paula Matuszek Fall, 2008.
24
CS 8520: Artificial Intelligence Robotics Paula Matuszek Fall, 2008
-
Upload
prosper-greene -
Category
Documents
-
view
223 -
download
3
Transcript of CS 8520: Artificial Intelligence Robotics Paula Matuszek Fall, 2008.

CS 8520: Artificial Intelligence
Robotics
Paula Matuszek
Fall, 2008

CSC 8520 Fall, 2008. Paula Matuszek. Slides based on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt 2
What is your favorite robot?
Robby – Forbidden Planet Robocop
Data
HAL 9000
CSC 8520 Fall, 2008. Paula Matuszek. Slides based on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt 3
“A robot is a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices through variable programmed motions for the performance of a variety of tasks.” (Robot Institute of America)
Definition:
Alternate definition:
“A robot is a one-armed, blind idiot with limited memory and which cannot speak, see, or hear.”
What is a robot?

CSC 8520 Fall, 2008. Paula Matuszek. Slides based on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt 4
What are robots good at?
• What is hard for humans is easy for robots.– Repetitive tasks.– Continuous operation.– Complicated calculations.– Refer to huge databases.
• What is easy for a human is hard for robots. – Reasoning.– Adapting to new situations.– Flexible to changing requirements.– Integrating multiple sensors.– Resolving conflicting data.– Synthesizing unrelated information.– Creativity.

CSC 8520 Fall, 2008. Paula Matuszek. Slides based on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt 5
What tasks would you give robots?
• Dangerous– space exploration– chemical spill cleanup– disarming bombs– disaster cleanup
• Boring and/or repetitive– welding car frames– part pick and place– manufacturing parts.
• High precision or high speed– electronics testing– surgery– precision machining.

CSC 8520 Fall, 2008. Paula Matuszek. Slides based on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt 6
What does building robots teach us about humans?
• How do our sensors work?– eyes
– brain
• How do we integrate sensors?
• How does our muscular-skeletal system work?– How do we grab and hold an object?
• How does our brain process information?
• What is nature of intelligence?
• How do we make decisions?
CSC 8520 Fall, 2008. Paula Matuszek. Slides based on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt 7
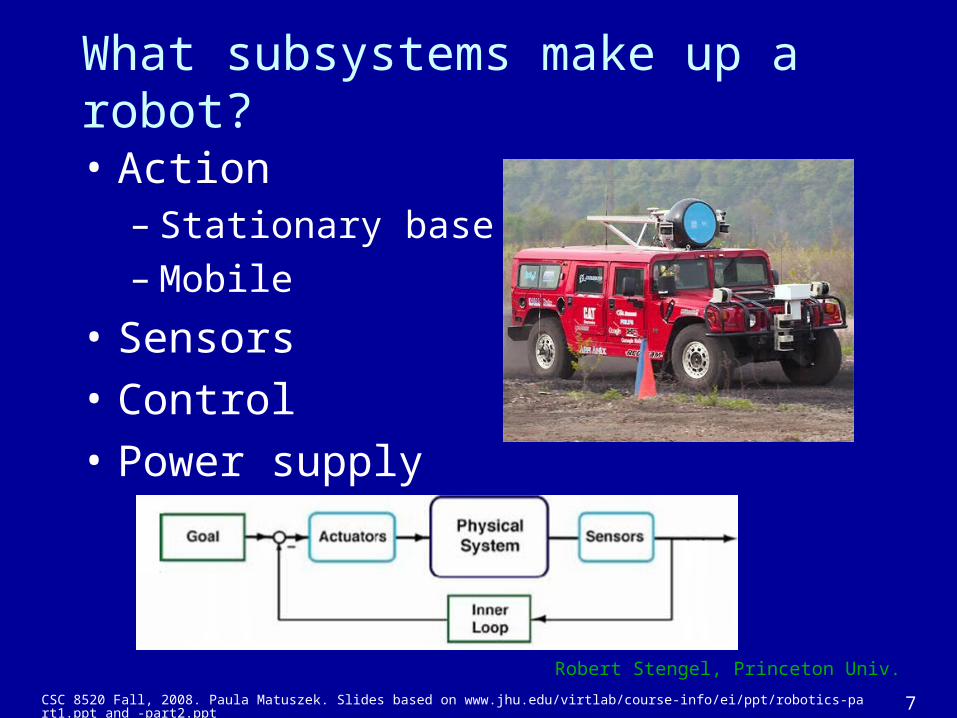
What subsystems make up a robot?
• Action– Stationary base– Mobile
• Sensors
• Control
• Power supply
Robert Stengel, Princeton Univ.
CSC 8520 Fall, 2008. Paula Matuszek. Slides based on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt 8
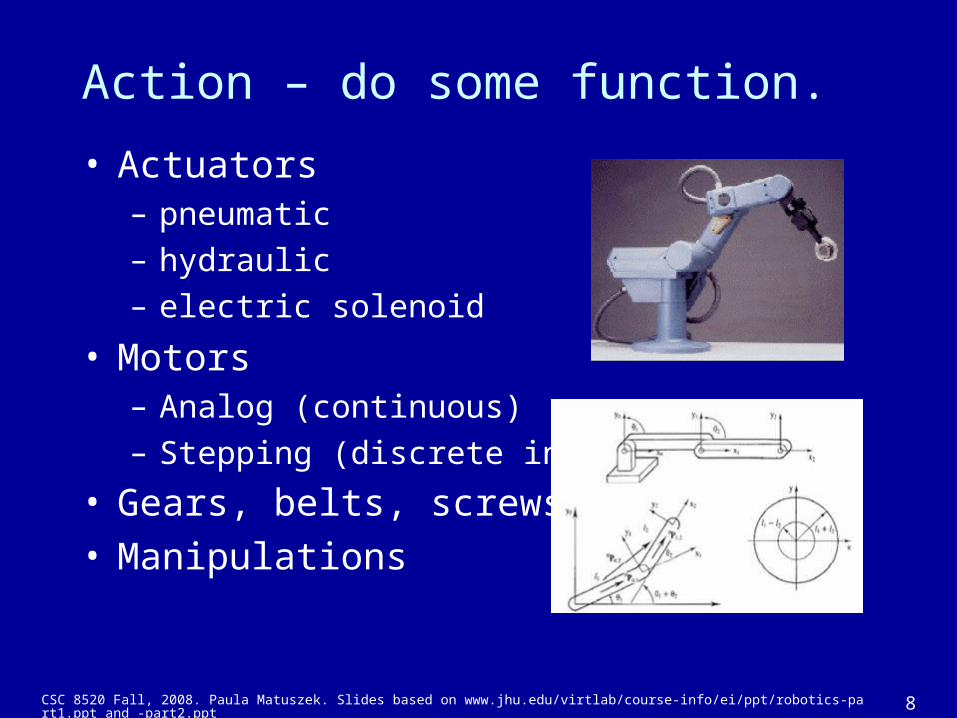
Action – do some function.
• Actuators– pneumatic
– hydraulic
– electric solenoid
• Motors– Analog (continuous)
– Stepping (discrete increments)
• Gears, belts, screws, levers
• Manipulations

CSC 8520 Fall, 2008. Paula Matuszek. Slides based on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt 9
Three types of robot actions.
• Pick and place– Moves items between points.
• Continuous path control– Moves along a programmable path
• Sensory– Employs sensors for feedback
CSC 8520 Fall, 2008. Paula Matuszek. Slides based on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt 10
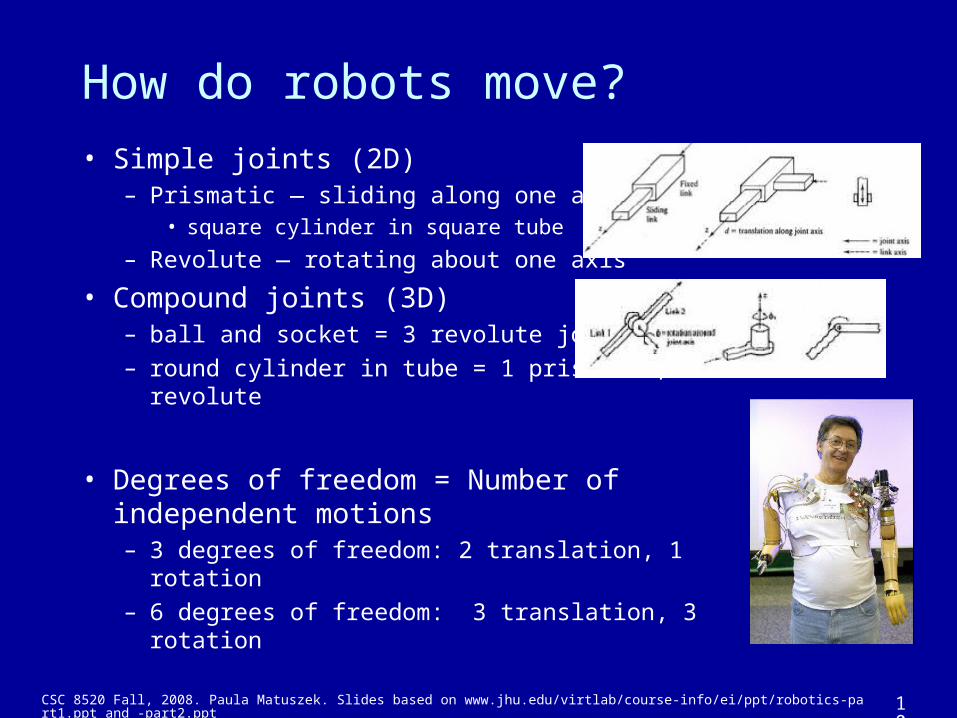
• Simple joints (2D)– Prismatic — sliding along one axis
• square cylinder in square tube
– Revolute — rotating about one axis
• Compound joints (3D)– ball and socket = 3 revolute joints
– round cylinder in tube = 1 prismatic, 1 revolute
• Degrees of freedom = Number of independent motions– 3 degrees of freedom: 2 translation, 1 rotation
– 6 degrees of freedom: 3 translation, 3 rotation
How do robots move?

CSC 8520 Fall, 2008. Paula Matuszek. Slides based on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt 11
Mobility
• Legs
• Wheels
• Tracks
• Crawls
• Rolls

CSC 8520 Fall, 2008. Paula Matuszek. Slides based on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt 12
What sensors might robots have?
• Optical– Laser / radar
– 3D
– Color spectrum
• Pressure• Temperature• Chemical• Motion & Accelerometer• Acoustic
– Ultrasonic

CSC 8520 Fall, 2008. Paula Matuszek. Slides based on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt 13
What use are sensors?
• Uses sensors for feedback – Closed-loop robots use sensors in
conjunction with actuators to gain higher accuracy – servo motors.
– Uses include mobile robotics, telepresence, search and rescue, pick and place with machine vision.

CSC 8520 Fall, 2008. Paula Matuszek. Slides based on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt 14
Control - the Brain
• Open loop, i.e., no feedback, deterministic – Instructions
– Rules
• Closed loop, i.e., feedback– Learn
– Adapt

CSC 8520 Fall, 2008. Paula Matuszek. Slides based on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt 15
What are some problems with control of robot actions?
• Joint play, compounded through N joints.• Accelerating masses produce vibration, elastic
deformations in links.• Torques, stresses transmitted depending on end
actuator loads.• Feedback loop creates instabilities.
– Delay between sensing and reaction.
• Firmware and software problems– Especially with more intelligent approaches

CSC 8520 Fall, 2008. Paula Matuszek. Slides based on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt 16
How do you measures of performance of robot?
• Speed and acceleration• Resolution• Working volume• Accuracy• Cost• Plus all the kinds of evaluation functions we have
talked about for any AI system.

CSC 8520 Fall, 2008. Paula Matuszek. Slides based on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt 17
Measures of Performance
• Speed and acceleration– Faster speed often reduces resolution or increases cost– Varies depending on position, load.– Speed can be limited by the task the robot performs (welding,
cutting)
• Resolution– Often a speed tradeoff
– The smallest movement the robot can make• Working volume
– The space within which the robot operates.– Larger volume costs more but can increase the capabilities of a
robot

CSC 8520 Fall, 2008. Paula Matuszek. Slides based on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt 18
Performance (cont.)
•Accuracy
•The difference between the actual position of the robot and the programmed position
•Repeatability
•Will the robot always return to the same point under the same control conditions?
•Varies depending on position, load
•Cost
•Typically a tradeoff – improved performance on other metrics vs lower cost

CSC 8520 Fall, 2008. Paula Matuszek. Slides based on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt 19
How are robots different from automated machinery?• Machinery is designed to carry
out a specific task.– Bottling machine
– Dishwasher
– Paint sprayer
• Robots are designed to carry out a variety of tasks– Pick and place arms
– Mobile robots
– Computer Numerical Control machines
• The lines are becoming blurred.

CSC 8520 Fall, 2008. Paula Matuszek. Slides based on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt 20
The Future of Robotics.
Robots that can learn. Robots with artificial intelligence. Robots that make other robots. Swarms
CSC 8520 Fall, 2008. Paula Matuszek. Slides based on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt 21
Lab:
• Look at a couple of robotic videos and note:– Which features makes the task something a robot would be used
for?– What are the components of the robot:
• Action• Sensors• Control• Power Supply
• How is their performance?– Speed and acceleration
– Resolution– Working volume– Accuracy– Cost

CSC 8520 Fall, 2008. Paula Matuszek. Slides based on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt 22
Some good robotics videos.
• Swimming fish: – http://vger.aa.washington.edu/research.html– http://www.newscientist.com/article/dn14101-shoal-of-robot-fish-casts-a-wider-data-net.html
• Robot wars: – http://robogames.net/videos.php
• Japanese robots:– http://www.ecst.csuchico.edu/~renner/Teaching/Robotics/videos.html (note: about half the
links are broken)
• Social robots: – http://www.ai.mit.edu/projects/humanoid-robotics-group/kismet/kismet.html
• Miscellaneous Robots:– http://www.newscientist.com/article/dn9972-video-top-10-robots.html– http://grinding.be/category/robots
• Swarms– http://www.youtube.com/watch?v=SkvpEfAPXn4
CSC 8520 Fall, 2008. Paula Matuszek. Slides based on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt 23
Play Robot Constructor
• http://www.channel4.com/science/microsites/R/robots/constructor.html
• What options does it give you for • Action
• Sensors
• Control
• Power Supply

CSC 8520 Fall, 2008. Paula Matuszek. Slides based on www.jhu.edu/virtlab/course-info/ei/ppt/robotics-part1.ppt and -part2.ppt 24
Will robots take over the world?• Which decisions can the machine
make without human supervision?• May machine-intelligent systems
make mistakes (at the same level as humans)?
• May intelligent systems gamble when uncertain (as humans do)?
• Can (or should) intelligent systems exhibit personality?
• Can (or should) intelligent systems express emotion?
• How much information should the machine display to the human operator?
HAL - 2001 Space Odyssey