
CS 128/ES 228 - Lecture 11a1 GPS. CS 128/ES 228 - Lecture 11a2 Global Positioning System .
35
CS 128/ES 228 - Lecture 11a 1 GPS
-
date post
19-Dec-2015 -
Category
Documents
-
view
214 -
download
0
Transcript of CS 128/ES 228 - Lecture 11a1 GPS. CS 128/ES 228 - Lecture 11a2 Global Positioning System .

CS 128/ES 228 - Lecture 11a 1
GPS

CS 128/ES 228 - Lecture 11a 2
Global Positioning System
www.usace.army.mil

CS 128/ES 228 - Lecture 11a 3
GPS in practice.
Recreational
GIS inputs
Surveying
Transportation
and of course, the military

CS 128/ES 228 - Lecture 11a 4
Why study GPS theory… (just turn it on& use it,
right?)

CS 128/ES 228 - Lecture 11a 5
The NAVSTAR system
GPS for Land Surveyors. J. Van Sickle. Ann Arbor Press, 1996
Military wanted portable, fast, passive positioningsystem
Navstar I launched Feb ’78. Now 24 satellites + “spares”
Global, 24/7 coverage by at least 4 satellites
Satellites carry atomic clocks

CS 128/ES 228 - Lecture 11a 6
Early GPS specs
http://gigaom.com/2006/12/08/telenav-gps/
Military criteria for a 1970s positioning system:
1. Able to direct 5 bombs to the same crater
2. Light enough to carry on soldier’s back
3. Cost under $20,000!
Bob Rennard, now Chief Technology Officer at TeleNav

CS 128/ES 228 - Lecture 11a 7
They’ve gotten smaller!
http://www.engadget.com/2006/01/12/new-zealands-rakon-
develops-worlds-smallest-gps-receiver/
Posted Jan 12th 2006 10:45PM by Marc PertonFiled under: GPS
So you think today's handheld, SDIO and cellphone-based GPS units are small? Get ready for a new generation of even smaller GPS devices, ranging from wristwatches to slim cellphones to -- and we just know this is coming -- implants. That's the promise held forth by what is being billed as the world's smallest GPS receiver, which was developed by New Zealand-based Rakon, a company affiliated with GPS-make Navman. According to Rakon, the chip is about the size of a baby's fingernail, and should be available in a range of devices within the next two years.

CS 128/ES 228 - Lecture 11a 8
GPS basics
Both: Differential GPS Explained. J. Hurn. Trimble Navigation, 1993

CS 128/ES 228 - Lecture 11a 9
1, 2 …
Both: Differential GPS Explained. J. Hurn. Trimble Navigation, 1993

CS 128/ES 228 - Lecture 11a 10
3!
Differential GPS Explained. J. Hurn. Trimble Navigation, 1993
Technically 4 satellites are necessary, but normally only 1 of the 2 points is on the geoid
But, as we’ll see later, a 4th satellite is still useful
CS 128/ES 228 - Lecture 11a 11
How to time the signal?
Standard EDMs bounce a signal off a reflector and measure time of return
But, GPS requires a low-power transmission and passive receivers
Imagine 2 people with synchronized stop watches, standing 1 mile apart. A gun fires near 1, and each records the time when they hear the shot. What do the 2 times tell you?

CS 128/ES 228 - Lecture 11a 12
Pseudocode
GPS: A guide to the next utility. J. Hurn. Trimble Navigation, 1993
A string of pseudo-random bits
Predetermined sequence – can be generated by the satellite and the receivers
CS 128/ES 228 - Lecture 11a 13
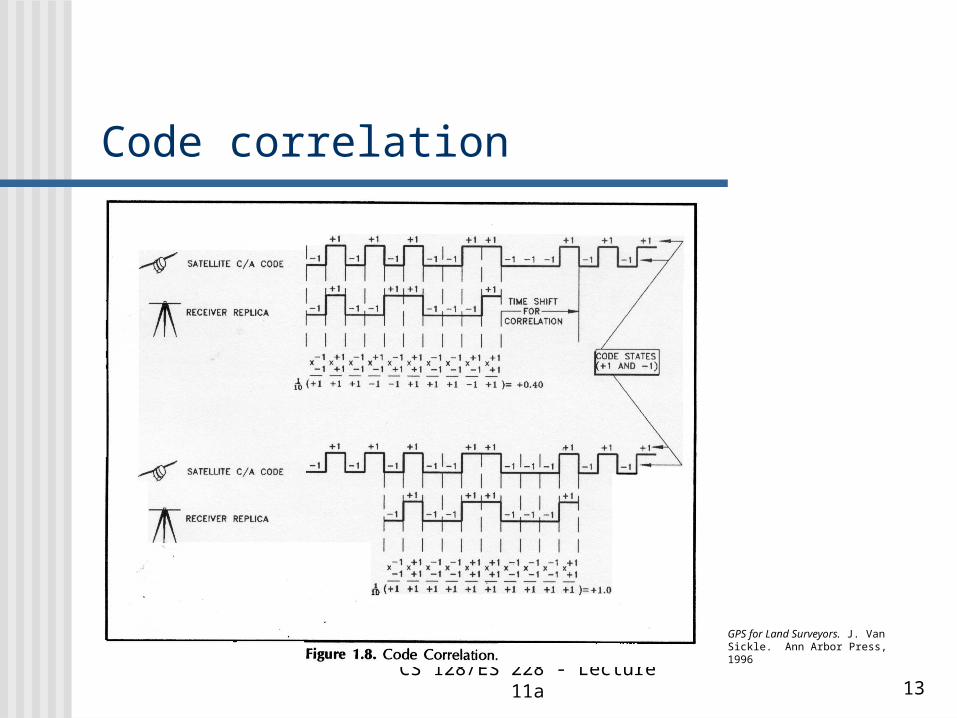
Code correlation
GPS for Land Surveyors. J. Van Sickle. Ann Arbor Press, 1996

CS 128/ES 228 - Lecture 11a 14
But wait: for $19.95 you get …
C/A (coarse acquisition) code:- short (1 ms) & slow (1.023 Mbps)- meant to enable receivers to get a crude “fix” quickly
P (precision) code:- long (267 d) & fast (10.23 Mbps) - permits sub-meter accuracy

CS 128/ES 228 - Lecture 11a 15
Still not sure? There’s more …
Each code is broadcast on 2 frequencies, the L1 and L2 bands
“Dual frequency” receivers utilize the frequency difference between L1 & L2 to compensate for atmospheric distortions – more on that later
Survey-grade receivers – mucho $$
CS 128/ES 228 - Lecture 11a 16
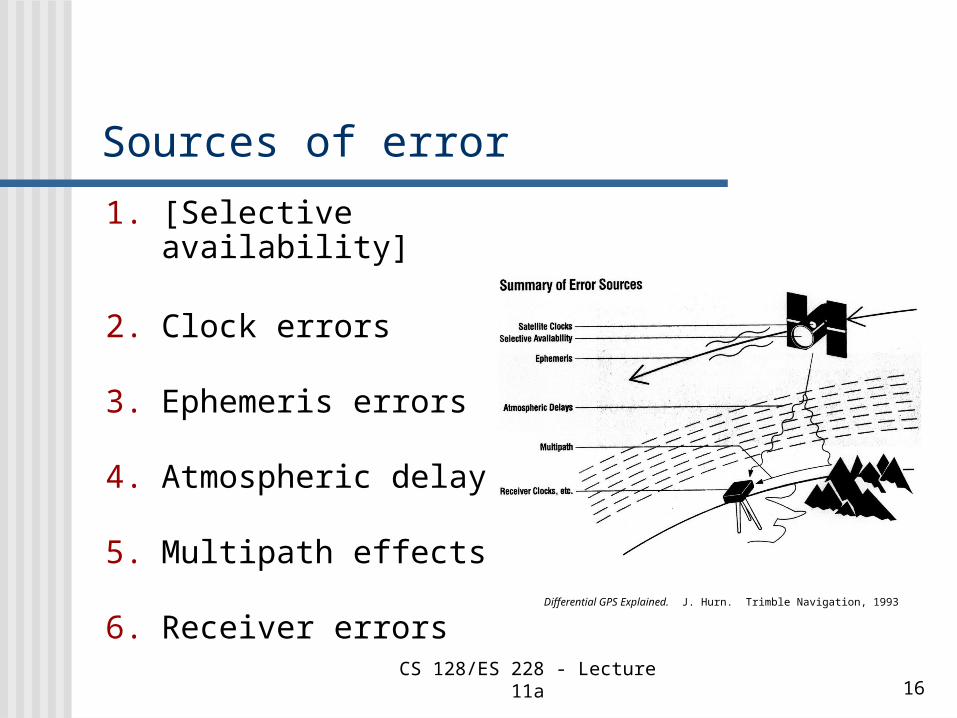
Sources of error
1. [Selective availability]
2. Clock errors
3. Ephemeris errors
4. Atmospheric delays
5. Multipath effects
6. Receiver errors Differential GPS Explained. J. Hurn. Trimble Navigation, 1993

CS 128/ES 228 - Lecture 11a 17
A small clock error matters!
Microwaves travel at approximately the speed of light:
300,000 km per second
A clock error of only 1 µs could produce a positional error of ~300 m!
How can a $100 GPS receiver have a clock that stays accurate to <<1 µs??
CS 128/ES 228 - Lecture 11a 18
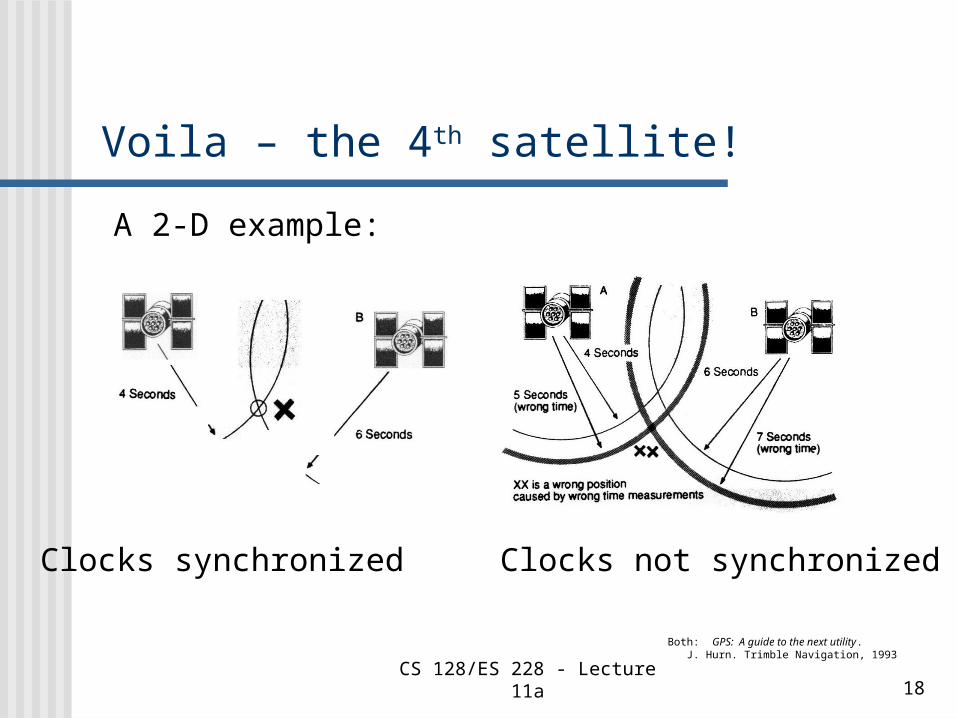
Voila – the 4th satellite!
Both: GPS: A guide to the next utility. J. Hurn. Trimble Navigation, 1993
A 2-D example:
Clocks synchronized Clocks not synchronized

CS 128/ES 228 - Lecture 11a 19
If the 4 ranges don’t overlap:
Both: GPS: A guide to the next utility. J. Hurn. Trimble Navigation, 1993
Receiver adjusts its clocks until they do
[Actually: done by algebra, not trial & error]
The time on a $100 GPS unit is really accurate!

CS 128/ES 228 - Lecture 11a 20
Ephemeris errors
Trimble Navigation
Ephemeris: mathematical description of an orbit

CS 128/ES 228 - Lecture 11a 21
Atmospheric delays
Differential GPS Explained. J. Hurn. Trimble Navigation, 1993
Signal slowed by:- charged particles in the ionosphere- water vapor in the troposphere
Dual-frequency receivers can correct for ionosphere but not troposphere errors
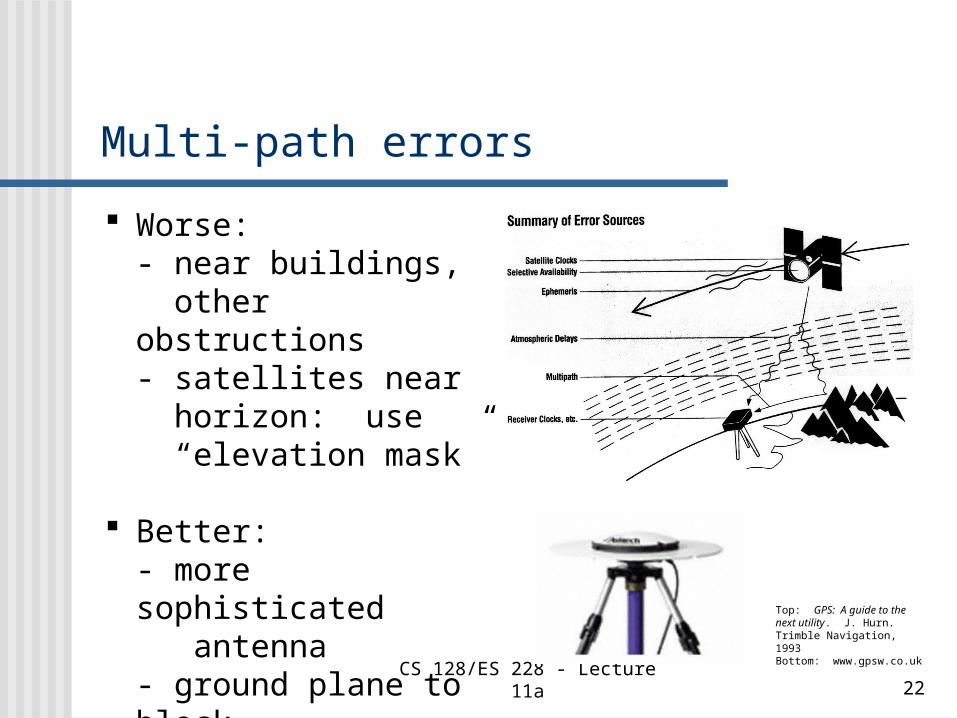
CS 128/ES 228 - Lecture 11a 22
Multi-path errors
Top: GPS: A guide to the next utility. J. Hurn. Trimble Navigation, 1993Bottom: www.gpsw.co.uk
Worse:- near buildings, other obstructions- satellites near horizon: use “elevation mask”
Better:- more sophisticated antenna- ground plane to block low-angle reflections

CS 128/ES 228 - Lecture 11a 23
Typical error “budget” (m)*
Source:Standard GPS
Differential GPS
Satellite clocks 1.5 ~ 0
Ephemeris errors 2.5 ~ 0
Ionosphere delays 5.0 0.4
Troposphere delays 0.5 0.2
Multi-path (reflections) 0.6 0.6
Receiver errors 0.3 0.3
Typical totals 10 – 15 1-2
Differential GPS Explained. J. Hurn. Trimble Navigation
* Horizontal position; vertical errors typically 2x or greater
CS 128/ES 228 - Lecture 11a 24
Improving GPS accuracy
DOP and mission planning
Differential GPS
Surveying-grade GPS
CS 128/ES 228 - Lecture 11a 25
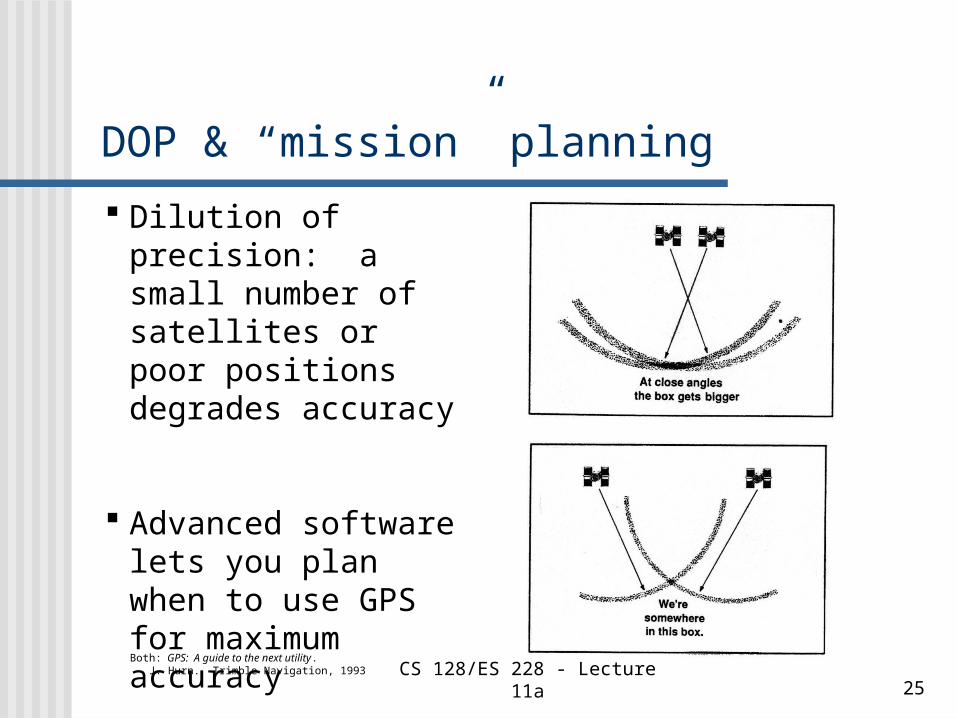
DOP & “mission” planning
Both: GPS: A guide to the next utility. J. Hurn. Trimble Navigation, 1993
Dilution of precision: a small number of satellites or poor positions degrades accuracy
Advanced software lets you plan when to use GPS for maximum accuracy
CS 128/ES 228 - Lecture 11a 26
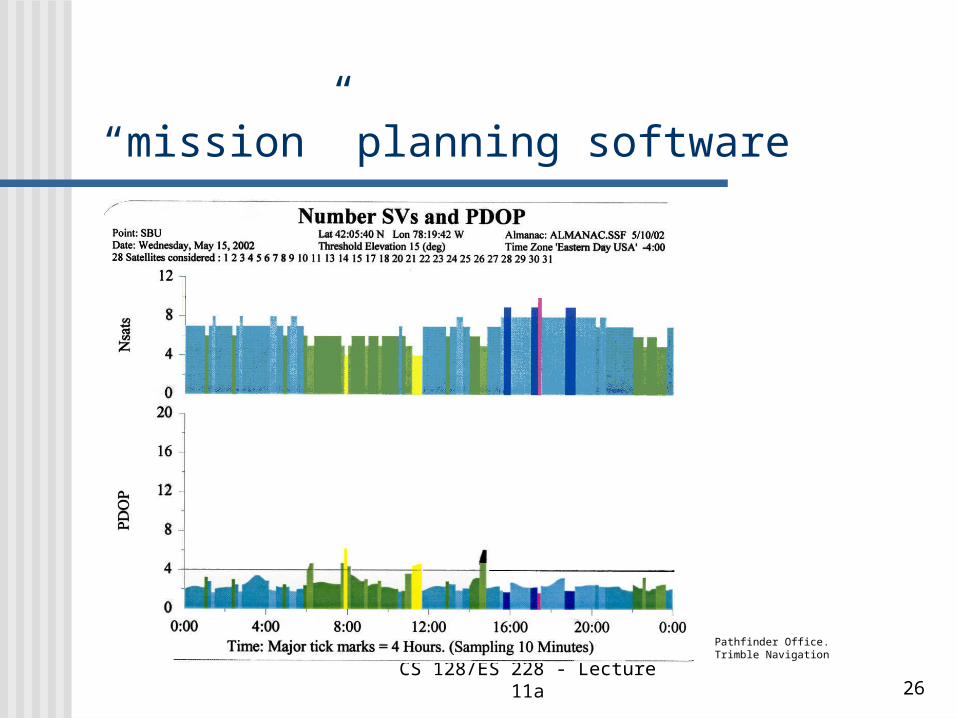
“mission” planning software
Pathfinder Office. Trimble Navigation
CS 128/ES 228 - Lecture 11a 27
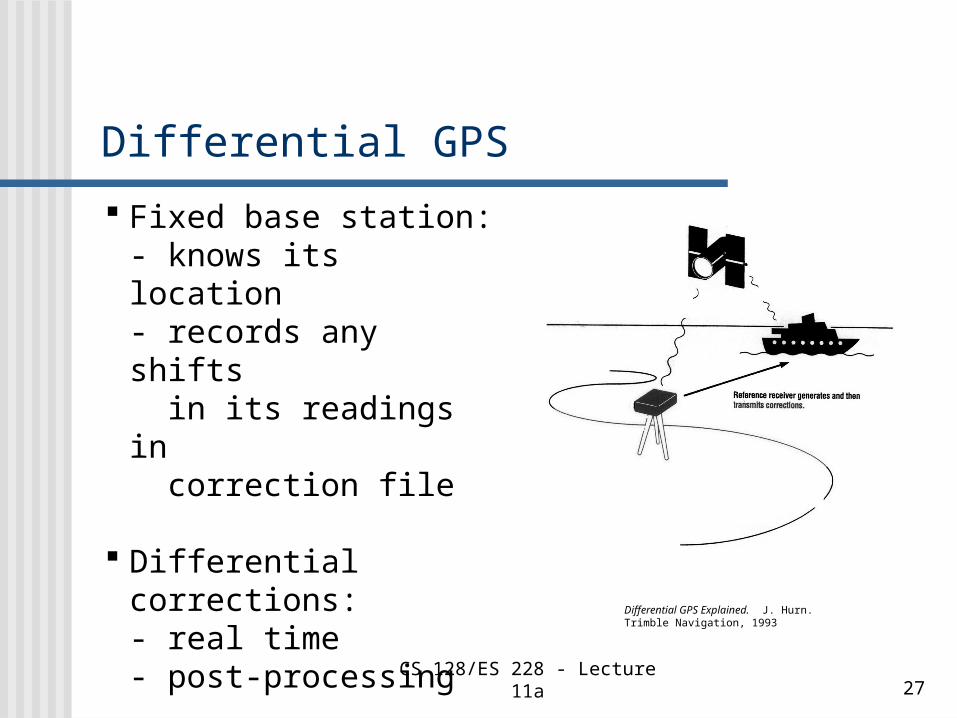
Differential GPS
Differential GPS Explained. J. Hurn. Trimble Navigation, 1993
Fixed base station:- knows its location- records any shifts in its readings in correction file
Differential corrections:- real time - post-processing

CS 128/ES 228 - Lecture 11a 28
Real-time DGPS
GPS: A guide to the next utility. J. Hurn. Trimble Navigation, 1989
Radio link with base station
U. S. Coast Guard beacons
WAAS

CS 128/ES 228 - Lecture 11a 29
Coast Guard beacons
www.navcen.uscg.gov/dgps/coverage/NYork.htm
Trimble’s Beacon on a Belt
www.trimble.com

CS 128/ES 228 - Lecture 11a 30
WAAS Wide Area Augmentation System
Designed by FAA &DOT for generalaviation
ground stations collect DGPS data & uplink to 2 geostationary satellites, 1 over east coast, 1 over the west coast
www.garmin.com/aboutGPS/waas.html

CS 128/ES 228 - Lecture 11a 31
Post-processed differential GPS
Opened just this year:- Set of NYS DOT DGPS stations, along major highways
- Locally: new stations in Friendship, Salamanca
http://www.ngs.noaa.gov/CORS/Maps2005/ny.html
National Geodetic Survey:CORS (Continuously Operating Refer. Stations)
http://www.ngs.noaa.gov/CORS/

CS 128/ES 228 - Lecture 11a 32
Survey-grade GPS Uses high-quality, dual-frequency receivers
and DGPS
Carrier phase processing- utilizes the L1 or L2 carrier signal, 1.2 / 1.5 GHz
Can achieve accuracies of < 1 cm
Expensive, complex, and requires long periods of data collection at each station
Differential GPS Explained. J. Hurn. Trimble Navigation, 1993

CS 128/ES 228 - Lecture 11a 33
The Future of GPS Everyday utilities
(cell phones, car navigation systems)
Integrated GIS/GPS units
GPS stalking??
???
http://www.flytip.com/blogs/mobility/
archives/location_based/
index.shtml
CS 128/ES 228 - Lecture 11a 34
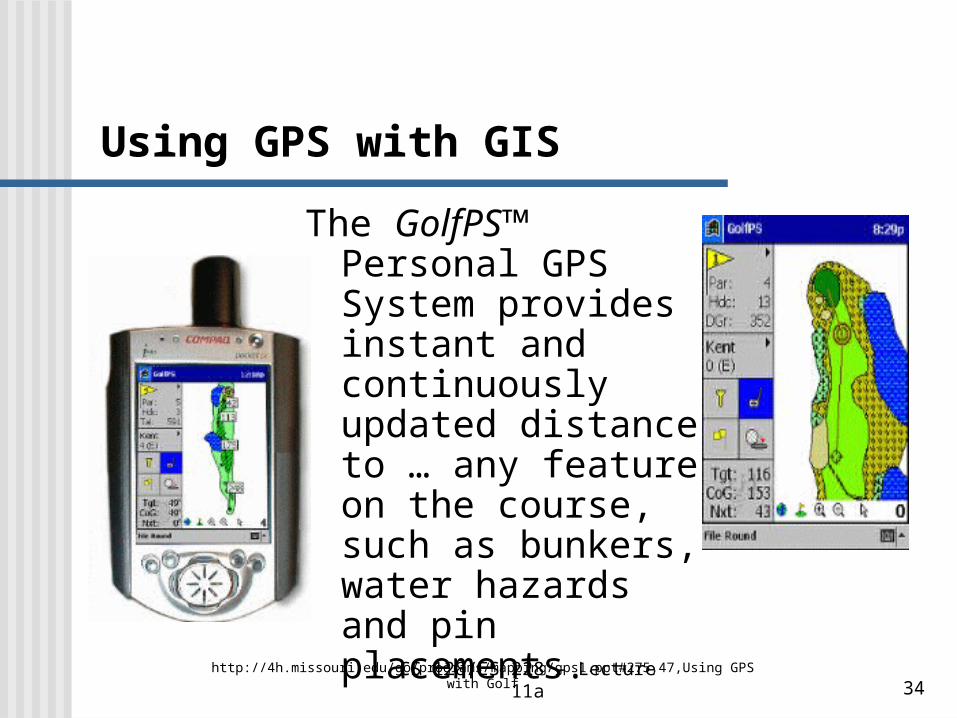
Using GPS with GIS
The GolfPS™ Personal GPS System provides instant and continuously updated distance to … any feature on the course, such as bunkers, water hazards and pin placements.
http://4h.missouri.edu/go/programs/mapping/gps1.ppt#275,47,Using GPS with Golf

CS 128/ES 228 - Lecture 11a 35
A driver has blamed his sat nav for leaving his car teetering on the edge of a cliff after he followed its instructions
Driver Led To 100ft Cliff Edge By Sat Nav 3:40pm UK, Wednesday March 25, 2009


















