CROSSTALK IDENTIFICATION AND CANCELLATION IN DSL … · CROSSTALK IDENTIFICATION AND CANCELLATION...
124
CROSSTALK IDENTIFICATION AND CANCELLATION IN DSL SYSTEMS a dissertation submitted to the department of electrical engineering and the committee on graduate studies of stanford university in partial fulfillment of the requirements for the degree of doctor of philosophy Chaohuang Zeng July 2001
Transcript of CROSSTALK IDENTIFICATION AND CANCELLATION IN DSL … · CROSSTALK IDENTIFICATION AND CANCELLATION...

CROSSTALK IDENTIFICATION AND CANCELLATION
IN DSL SYSTEMS
a dissertation
submitted to the department of electrical engineering
and the committee on graduate studies
of stanford university
in partial fulfillment of the requirements
for the degree of
doctor of philosophy
Chaohuang Zeng
July 2001

c° Copyright by Chaohuang Zeng 2001
All Rights Reserved
ii

I certify that I have read this dissertation and that in
my opinion it is fully adequate, in scope and quality, as
a dissertation for the degree of Doctor of Philosophy.
John M. Cioffi(Principal Adviser)
I certify that I have read this dissertation and that in
my opinion it is fully adequate, in scope and quality, as
a dissertation for the degree of Doctor of Philosophy.
John T. Gill III
I certify that I have read this dissertation and that in
my opinion it is fully adequate, in scope and quality, as
a dissertation for the degree of Doctor of Philosophy.
Kenneth Kerpez
Approved for the University Committee on Graduate
Studies:
iii

Abstract
Digital subscriber line (DSL) technology uses the existing unshielded twisted-pair
(UTP) telephone lines to offer high-speed data transmission to and from customer
premises. The crosstalk among the twisted pairs in the same or neighboring bundles
in a cable is a major impairment in the current DSL systems. It is invaluable for a
service operator to obtain the crosstalk transfer functions because this information
can be used to facilitate the provisioning, maintenance, and diagnosis of the DSL
systems, and to signiÞcantly improve the DSL systems� performance (e.g., the data
rate and the line reach).
This dissertation proposes a novel idea of an impartial network maintenance
center that identiÞes the crosstalk coupling functions among the twisted pairs in
these DSL systems. The crosstalk identiÞcation technique includes the following four
major procedures: 1) the transmitted and received signals from each DSL modem for
a pre-deÞned time period are collected and sent to the network maintenance center;
2) the signals are resampled according to the clock rate of the receiver of interest;
3) the signals� timing differences are estimated by cross-correlation; 4) the crosstalk
coupling functions are estimated using the least-squares method. The performance of
the cross-correlation and least-squares methods is analyzed to determine the amount
of data needed for identiÞcation. Simulation results show that the proposed methods
can identify the crosstalk functions accurately and are consistent with theoretical
analysis.
Near-end crosstalk (NEXT) from other types of systems (such as HDSL, SDSL,
T1, etc) is the major impairment to current asymmetric DSL (ADSL) downstream
transmission. This dissertation presents two methods for an ADSL receiver to cancel
iv

one (dominant) NEXT signal. The methods exploit the fact that the crosstalk signal
has a large excess bandwidth and its spectra in the main lobe and in the excess band
are strongly correlated. The principal idea is then to estimate the crosstalk in some
frequency bands (e.g., excess band) and cancel it in other frequency bands (e.g., main
lobe). In order to select the right frequency bands to observe the crosstalk signal,
a frequency-domain analysis is taken to provide guidance, as well as an intuitive
explanation of the crosstalk estimation and cancellation. Moreover, a fast algorithm
is proposed for practical implementation. Simulation results show that one of the
proposed methods, MMSE estimation and cancellation, is very effective to cancel one
(dominant) NEXT and the improvement is signiÞcant in terms of the data rate and
the line reach for the ADSL service. For example, using an actual measured NEXT
transfer function, the proposed method can increase the ADSL downstream data rate
by 200% for some loops.
This dissertation also includes three multiuser water-Þlling algorithms for a
Gaussian multiaccess channel with intersymbol interference. These algorithms ef-
Þciently compute the optimal transmit power spectral density (PSD) for each user
and obtain the capacity region for a two-user channel.
v

Acknowledgements
It is a joyful moment for me to write these acknowledgements because Þnally there is
an official place to say �thank you� to many people I am indebted to.
I am extremely grateful to Professor John M. Cioffi because he gives me this
opportunity to study and do research in his group. John provides me extraordinary
help and advice, some of which come from ordinary conversation and group meetings.
John had a lot of conÞdence and faith in me. When I just joined the group, he asked
me to participate the standard contributions to ANSI, ETSI, ITU committees. The
work expedites my understanding of DSL technology and its future direction. Last
year, John let me work on a large research project of characterizing the crosstalk
environment in DSL systems, which laid the foundation of my thesis. During the
course, John always gave enthusiastic encouragement on my small progress and offered
insightful comments on the technical problems. Despite his tight schedule, he always
managed to respond to my difficulty by email or talking to me directly. I particularly
look up to his spirit of diligence, humbleness, amiableness, entrepreneurship, and so
on.
I would like to thank Dr. Ken Kerpez from Telcordia Inc., which supports my
research project. Ken encouraged me to look into the problem of DSL crosstalk
cancellation, which now becomes part of my thesis. He is a reading committee member
of my thesis and provides me very constructive and rigorous comments.
I would also like to thank my second reader, Professor John T. Gill III. Professor
Gill is a guru of LATEX. His numerous suggestions on the LATEX style and comments
on the thesis content greatly improve this dissertation.
vi

Along my graduate study, many professors gave me Þnancial support and aca-
demic advice. Professor Milan Sonka from University of Iowa supported me during
my Þrst year in USA. Professor Yuval Shahar in Stanford Medical Informatics De-
partment helped me come to Stanford University for my graduate study in Electrical
Engineering. Professor Edward J. McCluskey had kindly supported me for two years
to obtain my Master of Science degree in Stanford. Without them, I would never be
able to Þnish my Ph.D. degree in Stanford by now.
My group members are like a new family to me in USA. These talented people
are so ready to offer help on both research and everyday life. Besides the research, we
had a lot of fun by having many sports (skiing, basketball, soccer, volleyball, bowling,
etc.), monthly birthday party, everyday�s coffee break, and every hour�s joking break.
My thanks go to Joice Debolt, Carlos Aldana, Louise Hoo, Kok-Wui Cheong, Won-
Joon Choi, Wei Yu, George Ginis, Wonjong Rhee, Jeannie Lee Fang, Atul Salvekar,
Ghazi A Al-rawi, Dimitrios-Alexandros Toumpakaris, Avneesh Agarwal, Jungwon
Lee, Amal Ekbal, Kee-Bong Song, Nick Wu, Susan Lin, Ardavan Maleki-Tehrani,
John Fan, Joonsuk Kim, Jose Tellado-Mourelo, Joseph Paul Lauer. Especially, I
would like to express my appreciation to Carlos for his unselÞsh devotion to maintain
our computer systems. The visiting scholars in our group are also very resourceful, I
would especially like to thank Dr. Elisabeth De Carvalho for her discussion.
I would like to thank my family in China for their tremendous support. By
talking to them, I�ve always been very optimistic about the future. This thesis is also
to commemorate my father, who unfortunately passed away several years ago and
can only share the joyful moment in a different world. Finally but most importantly,
I would like to thank my wife - Dan Li. Without her, it is absolutely impossible for
me to Þnish my thesis!
Chaohuang Zeng
July, 2001
vii

viii

Contents
Abstract iv
Acknowledgements vi
1 Introduction 1
1.1 DSL Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.1.1 Telephone Loop Structure . . . . . . . . . . . . . . . . . . . . 2
1.1.2 Generic DSL Model . . . . . . . . . . . . . . . . . . . . . . . . 4
1.1.3 Types of DSLs . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2 Noise Environment for DSL Systems . . . . . . . . . . . . . . . . . . 7
1.2.1 Crosstalk . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.2.2 Radio Frequency Interference (RFI) . . . . . . . . . . . . . . . 11
1.2.3 Impulse Noise . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.3 Systems Management . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.3.1 Unbundling Process . . . . . . . . . . . . . . . . . . . . . . . . 12
1.3.2 Spectral Compatibility . . . . . . . . . . . . . . . . . . . . . . 13
1.3.3 Maintenance, Diagnosis, and Provisioning . . . . . . . . . . . 14
1.4 Outline of Dissertation . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.4.1 Crosstalk IdentiÞcation . . . . . . . . . . . . . . . . . . . . . . 15
1.4.2 Crosstalk Cancellation . . . . . . . . . . . . . . . . . . . . . . 16
1.4.3 Multiuser Water-Þlling Algorithms . . . . . . . . . . . . . . . 17
1.5 Research Contributions . . . . . . . . . . . . . . . . . . . . . . . . . . 18
ix

2 Crosstalk IdentiÞcation 20
2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.2 Impartial Network Maintenance Center (NMC) . . . . . . . . . . . . 22
2.3 Crosstalk IdentiÞcation . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.3.1 Timing Difference Estimation . . . . . . . . . . . . . . . . . . 26
2.3.2 Crosstalk Functions Estimation . . . . . . . . . . . . . . . . . 28
2.3.3 Resampling for Different Services . . . . . . . . . . . . . . . . 34
2.4 Simulation Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
2.5 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3 Crosstalk Cancellation 44
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.2 System Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.3 Crosstalk Cancellation . . . . . . . . . . . . . . . . . . . . . . . . . . 50
3.3.1 Crosstalk Signal Estimation and Cancellation . . . . . . . . . 50
3.3.2 Geometrical Interpretation and Tone Selection . . . . . . . . . 52
3.3.3 Fast Computation . . . . . . . . . . . . . . . . . . . . . . . . . 58
3.3.4 Extension to Multiple Crosstalkers . . . . . . . . . . . . . . . 60
3.4 Simulation Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
3.4.1 HDSL NEXT Cancellation . . . . . . . . . . . . . . . . . . . . 63
3.4.2 SDSL NEXT Cancellation . . . . . . . . . . . . . . . . . . . . 66
3.4.3 Fast Computation . . . . . . . . . . . . . . . . . . . . . . . . . 67
3.5 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
4 Multiuser Water-Þlling Algorithms 72
4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
4.2 Prerequisite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
4.3 Multiuser Water-Þlling Algorithms . . . . . . . . . . . . . . . . . . . 78
4.3.1 Equal Priority : max(R1 +R2) . . . . . . . . . . . . . . . . . 79
4.3.2 K Users : max(R1 +R2 + · · ·+RK) . . . . . . . . . . . . . . . 82
4.3.3 Unequal Priority : max(αR1 + (1− α)R2) . . . . . . . . . . . 88
4.3.4 Comments on Further Research . . . . . . . . . . . . . . . . . 93
x

4.4 Simulation Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
4.5 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
5 Conclusions 98
5.1 Crosstalk IdentiÞcations . . . . . . . . . . . . . . . . . . . . . . . . . 99
5.2 Crosstalk Cancellation . . . . . . . . . . . . . . . . . . . . . . . . . . 100
5.3 Multiuser Water-Þlling Algorithms . . . . . . . . . . . . . . . . . . . 101
A Proof of Equation (2.7) 102
Bibliography 104
xi

List of Tables
2.1 DSL Characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.1 Main ADSL and HDSL Characteristics. . . . . . . . . . . . . . . . . 61
3.2 ADSL system parameters for data rate calculation. . . . . . . . . . . 63
4.1 Three-user channels loading process. . . . . . . . . . . . . . . . . . . 95
4.2 Two-user channel with unequal priority. . . . . . . . . . . . . . . . . 95
xii

List of Figures
1.1 Telephone loop structure. . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Generic DSL reference model. . . . . . . . . . . . . . . . . . . . . . . 3
1.3 ADSL FDD. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.4 VDSL FDD. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.5 Illustration of NEXT and FEXT. . . . . . . . . . . . . . . . . . . . . 8
1.6 NEXTs in two different loop topologies. . . . . . . . . . . . . . . . . . 9
1.7 FEXTs in three different loop topologies. . . . . . . . . . . . . . . . . 10
1.8 Coexistence of ILEC and CLEC. . . . . . . . . . . . . . . . . . . . . 13
2.1 Network model of DSL systems for one receiver. . . . . . . . . . . . . 23
2.2 Timing offset between the transmitted signals and the received signals.
Lt is the length of the pre-deÞned observation time span. . . . . . . . 24
2.3 A baseband crosstalk model. . . . . . . . . . . . . . . . . . . . . . . . 34
2.4 NEXT from HDSL and ISDN. Each curve represents only one crosstalker. 38
2.5 FEXT from ADSL, ISDN, and HDSL. Each curve represents only one
crosstalker. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
2.6 Absolute cross-correlation value between the received signal and the
HDSL transmitted signal. . . . . . . . . . . . . . . . . . . . . . . . . 40
2.7 HDSL NEXT time response and its estimate. . . . . . . . . . . . . . 41
2.8 The sum of the squared crosstalk estimation error. . . . . . . . . . . . 42
3.1 The primary and crosstalk channel model. . . . . . . . . . . . . . . . 47
3.2 Crosstalk estimation and cancellation. . . . . . . . . . . . . . . . . . 53
3.3 Measured NEXT coupling for a given line. . . . . . . . . . . . . . . . 62
xiii

3.4 HDSL NEXT estimation and cancellation. . . . . . . . . . . . . . . . 64
3.5 Downstream data rates with/without NEXT cancellation. . . . . . . . 65
3.6 SDSL NEXT estimation and cancellation. . . . . . . . . . . . . . . . 66
3.7 Downstream data rates with/without SDSL NEXT cancellation. . . . 68
3.8 HDSL NEXT cancellation using the fast algorithm. . . . . . . . . . . 69
3.9 SDSL NEXT cancellation using the fast algorithm. . . . . . . . . . . 70
4.1 Two-user Gaussian multiaccess channel. . . . . . . . . . . . . . . . . 73
4.2 Water-Þlling diagram for a single user channel. . . . . . . . . . . . . . 74
4.3 Water-Þlling diagram for two users with equal priorities. . . . . . . . 76
4.4 Water-Þlling diagram for two users with different priorities (α > 0.5). 77
4.5 Two curves representing functions g1(i)/g2(i) and b1(i)/b2(i), respec-
tively. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
4.6 Water-Þlling diagram for three users. . . . . . . . . . . . . . . . . . . 84
4.7 Two curves for f = 0 and g = 0. Binary search is used in both b1 and
b2 axes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
4.8 The capacity region of the two-user Gaussian multiaccess channel. . . 96
xiv

Chapter 1
Introduction
The last four decades have witnessed a dramatic improvement of transmission speed
over the ancient telephone wires, from 300 bit/s in one of the Þrst modems, AT&T�s
Bell 103, to 6 Mbit/s in some current DSL modems. The data rate is projected to
reach 52 Mbit/s when the very-high-bit-rate DSL (VDSL) service is deployed. In the
Þrst three decades (1955-1990), the modem was primarily designed to transmit data
over the voice band whose bandwidth is about 4 kHz. The data rate improvement
then relied heavily on the advance of equalization and coding techniques. In the
last decade, the DSL modems are designed to increase the data rate from a different
perspective, i.e., by using a much wider bandwidth. For example, ADSL and VDSL
have bandwidth of 1.104MHz and 17.664MHz, respectively. The wider bandwidth is
the fundamental driving factor that enables DSL to transmit more than 100 times of
data rate than the best voice-band modem (56 kbit/s, V.90 [1]). Unfortunately, there
is one major impairment associated with the wider bandwidth used by DSL systems.
That is the severe crosstalk among the telephone wires in the same or neighboring
bundles. This dissertation describes a method to identify the crosstalk environment
in individual DSL systems. The crosstalk information is extremely useful for service
operators to maintain and expand the DSL systems. Based on the estimated crosstalk
transfer function, this dissertation presents two methods to cancel or mitigate the
impact of one dominant crosstalker on ADSL services.
1

2 CHAPTER 1. INTRODUCTION
MDF
Central Office
SAI
Equipment
Feeder Distribution
CustomerPremises
Drop Wire
Pedestal
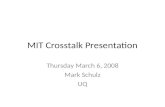
MDF: Main Distributing FrameSAI : Service Area Interface
Figure 1.1: Telephone loop structure.
1.1 DSL Systems
This section Þrst describes a typical telephone loop structure between the central
office (CO) and the customer premises. Then a generic DSL model and different
types of DSL services are described. In particular, ADSL and VDSL are described
in more detail because ADSL is the most widely deployed DSL service so far, and
VDSL is an extension of ADSL to much higher data rates.
1.1.1 Telephone Loop Structure
Figure 1.1, which is simpliÞed from [2, Figure 3.1], shows the typical telephone loop
structure. The main distributing frame (MDF) in the central office is a large wire
cross-connect frame that can connect any port of the equipment to the feeder cables as
shown in Figure 1.1. The feeder cable, known also as E-side or F1 plant, contains up
to 10000 unshielded twisted pairs (UTPs) of wires. These feeder cables are terminated

1.1. DSL SYSTEMS 3
CO/NGDLC/ONU
LT
LT
LT
Customers
NT TESwitch or
Multiplexor
repeater
ONU: Optical Network UnitLT : Line TerminationNT : Network TerminationTE : Terminal Equipment
Local LoopTrunk
Figure 1.2: Generic DSL reference model.
in the service area interface (SAI), which is typically about 3000 feet away from the
customer premises and serves on the order of 3000 living units. SAI also contains a
wire cross-connect device which connects any incoming wire to the distribution cable.
The distribution cable, known also as D-side, contains up to 1000 UTPs. Both feeder
cables and distribution cables are bundled into binder groups of 25, 50, or 100 pairs.
The UTPs in distribution cables connect to the drop wires via a pedestal device that
is also known as a distribution terminal. The drop wires then connect to the wires
inside the house via a network interface device (NID).
To reduce the number of wires in the feeder cables, digital loop carrier (DLC)
was used in the SAI to multiplex many different lines in the distribution cable to a
few T1-carrier feeder lines to the CO. The next-generation DLC (NGDLC) uses Þber
to connect the CO to the SAI, which serves up to 3, 000 customers.

4 CHAPTER 1. INTRODUCTION
1.1.2 Generic DSL Model
The generic DSL reference model is shown in Figure 1.2. LT is the DSL modem
at the operator end of the local loop; NT is the DSL modem at the customer end
of the local loop. TE is the user�s device, such as personal computer, fax machine,
telephone, etc. The repeater is a signal regeneration device that is located near the
midpoint of the telephone line. Most lines do not need repeaters. The local loop is
the twisted pair copper wires that connect the CO and the customer premises. The
switch or the multiplexor in the CO is used to interface between the LT�s modems
and the Þber in the trunk which connects to the outside network. The ONU (optical
network unit) is used with the VDSL service, where the loop starts from the ONU
instead of the CO because a short loop (less than about 3000 feet) is required.
1.1.3 Types of DSLs
At the time of writing, the DSL family includes ISDN (integrated services digital net-
work), HDSL (High-bit-rate DSL ), HDSL2 (second-generation HDSL), SDSL (single-
pair, symmetric DSL), SHDSL (single-pair, high-speed DSL), ADSL, and VDSL.
Of these DSLs, ISDN, ADSL, and HDSL have been standardized by International
Telecommunication Union (ITU). ITU-T Recommendation G.995.1 [3] provides a
comprehensive overview of ADSL and HDSL recommendations. HDSL2, SHDSL,
and VDSL are currently in the process of being standardized. SDSL is not stan-
dardized but has been deployed at various bit rate up to 2.32 Mbit/s. Some basic
characteristics of the different DSL services are listed in the following.
� ISDN. Basic rate ISDN (BRI) was originally envisioned to provide a uniformglobal network for telephony and data communication. It offers 160 kbit/s
bidirectional data transmission using 80 kHz bandwidth. The simple 2B1Q,
4 level PAM, baseband transmission with echo cancellation is used. There are
three variant systems in different countries as speciÞed in the appendices of ITU
Recommendation G.961 [4].
� HDSL. Three systems are speciÞed in the ITU-T recommendation G.961 [5].

1.1. DSL SYSTEMS 5
The Þrst system uses two or three wire pairs in parallel; each pair transports
bidirectionally a bit rate of 784 kbit/s. The second system uses only two pairs
in parallel; each pair transports bidirectionally a bit rate of 1168 kbit/s. The
third system uses only one pair with an increased bit rate of 2320 kbit/s bidi-
rectionally. The line codes for all the systems are either 2B1Q or carrierless
amplitude/phase (CAP) modulation [6]. The CAP modulation has a single car-
rier and is similar to the quadrature amplitude modulation (QAM). In north
America, 2B1Q HDSL with data rate of 784 kbit/s in each pair is universal.
� HDSL2 is a full duplex system and uses one twisted pair to offer a payload of
1.544 Mb/s. Compared to the HDSL one-pair system, it uses less bandwidth
but with a cost of very sophisticated trellis precoding technique [7].
� SDSL is not standardized but has been deployed. It uses one twisted pair tooffer various symmetric data rates up to 2.32 Mbit/s. The line code is 2B1Q.
Its advantages over HDSL and HDSL2 are variable data rates, lower cost, and
greater range.
� SHDSL uses 16-level pulse amplitude modulation (PAM) with trellis codes [8].Like SDSL, it offers various symmetric bit rates ranging from 300 kbit/s to 2.32
Mbit/s, depending on the loop length. SHDSL is more spectrally compatible
with other DSL systems because of its sharp rolloff in the excess band. Its draft
standard is waiting for approval [9].
� ADSL uses one pair to offer the asymmetric data transmission between thecustomer premises and the CO. The upstream and downstream data rates
are up to 640 kbit/s and 6 Mbit/s, respectively, within a service radius of
approximately 12 kft from the CO, and 176 kbit/s and 1.544 Mbit/s within the
radius of approximately 18 kft. ADSL allows simultaneous transmission of the
voice-band signal because it uses the frequency above the voice band. The line
code is discrete multitone transmission (DMT) [10][11], which is an effective
realization of multicarrier transmission [12][13]. Frequency division duplexing
(FDD) is used in most systems. ADSL FDD is shown in Figure 1.3.

6 CHAPTER 1. INTRODUCTION
Up Downstream
25.6 138 1104
FrequencykHz
Figure 1.3: ADSL FDD.
Downstream
0.138 3.75
FrequencyMHz
PSD
Upstream
5.2
Downstream
8.5
Upstream
12
Figure 1.4: VDSL FDD.
� VDSL is an extension of ADSL technology. It offers much higher data rate thanADSL on a shorter loop by using much wider bandwidth. The shorter loop
can be achieved by connecting the customer premises to an ONU instead of
the CO. The downstream bit rate ranges from 13 Mbit/s to 52 Mbit/s. The
upstream ranges from 1.6 Mbit/s to 26 Mbit/s. There are two trial standards
[14]. One standard uses DMT as the line code [15], while the other uses CAP
as the line code [16]. The FDD scheme shown in Figure 1.4 is recommended for
VDSL. The second upstream band can be extended to 30 MHz, depending on
the implementation.
In summary, ISDN, HDSL, HDSL2, SDSL, and SHDSL offer symmetrical full-
duplex data rates and use separate pairs from the plain old telephone service (POTS).
In contrast, ADSL and VDSL offer asymmetrical 1 data rates and coexist with POTS
by using FDD.1VDSL also supports symmetric data transmission.

1.2. NOISE ENVIRONMENT FOR DSL SYSTEMS 7
This summary of services is not complete without mentioning two other existing
legacy systems, T1 and E1, although they are not classiÞed into the DSL family by
some authors [2].
� T1 was originally designed for transmission between central offices in the UnitedStates in the early 1960s. Today the CO-to-CO connection is almost entirely
replaced by Þber and microwave. Since the early 1970s, T1 had also been
installed to connect the CO to the SAI, or to the customers in a local loop. It
uses dual simplex on two twisted pairs to offer 1.544 Mbit/s data rate in each
direction. To reduce the crosstalk between lines, the two pairs are kept in two
different binder groups, one of which transmits data in the upstream direction
and another transmits in the downstream direction. Additionally, T1 lines are
kept in separate binder groups from the DSL lines. T1 will be succeeded by
DSL services (e.g., HDSL2, SDSL) because T1 is more expensive. However,
many existing T1 lines are unlikely to be replaced by DSL services.
� E1 is similar to T1, but has a higher data rate of 2.048 Mbit/s for 32 voicechannels. It is used in Europe.
1.2 Noise Environment for DSL Systems
The UTP was originally designed to transport the voice signal. Its balance [17] is
best in the POTS band. Unfortunately, the balance worsens at the higher frequencies
that DSL systems use. The imbalance of the UTP induces it to pick up detrimental
differential signals from other sources. These undesirable coupled signals include
crosstalk, radio signal interference (RFI), and impulse noise.
1.2.1 Crosstalk
Crosstalk noise is due to the capacitive and inductive coupling from the signals in
other UTPs. Two commonly encountered types are near-end crosstalk (NEXT) and
far-end crosstalk (FEXT) as shown in Figure 1.5. NEXT is the sum of those crosstalk

8 CHAPTER 1. INTRODUCTION
Pair i
Pair j
NEXT FEXT
Figure 1.5: Illustration of NEXT and FEXT.
signals that travel in the opposite direction to the interfering signal. Intuitively
as in the Þgure, the interfering transmitter is in the �near end� of the interfered
receiver. Conversely, FEXT is the sum of those crosstalk signals that travel in the
same direction as the interfering signal and the interfered receiver is in the �far end�.
In general, FEXT is much smaller than NEXT in DSL systems because FEXT is
attenuated as it travels along the line. In ADSL and VDSL systems, FDD is used to
avoid NEXT from the same type of services. However, NEXT still exists in ADSL and
VDSL systems from other types of services like HDSL, SDSL, T1, and etc, because
they overlap in frequency.
Variant forms of NEXT and FEXT arise in real systems, depending on the topol-
ogy of the loop structure. Figure 1.6(a) shows NEXT in the customer side (NT) and
in the CO. NEXT in the NT is attenuated because the customer premises are in
separate locations. However, this attenuation is usually small because the length
difference in the same binder group is small. Figure 1.6(b) shows NEXT from a re-
peater of T1 or other services. The level of the crosstalk depends on the location of
the repeater. If it is close to the premises, the impact is sometimes disastrous on the
victim DSL system. This dissertation proposes two methods to cancel or mitigate
such strong crosstalk.
Figure 1.7(a-b) shows the unequal FEXT between two pairs because these two
pairs have different length. Unequal FEXT is not an issue for most DSL systems
because their noise is dominated by NEXT. However, it is a major problem for
VDSL because FEXT is the dominant crosstalk in VDSL systems beyond 1 MHz.
The FEXT induced by a shorter loop (e.g., 1000 ft) could be larger than the primary

1.2. NOISE ENVIRONMENT FOR DSL SYSTEMS 9
CO
NT
NT
(a)
LT
LT
NEXT
CO
NT
NT
(b)
LT
LT
NEXT
T1/HDSL Repeater
Figure 1.6: NEXTs in two different loop topologies.
VDSL signal in the longer loop (e.g., 3000 ft), which makes it impossible for the longer
loop to transport the required data rate. This is similar to the �near-far� problem
in the wireless Þeld. Power back-off (PBO) methods [18] are used to mitigate the
problem by transmitting less power on the shorter loop. With the knowledge of the
FEXT transfer function, Yu [19] recently proposed a new PBO method that performs
much better than previous methods that rely solely on FEXT models.
Figure 1.7(c) shows the FEXT from a T1/HDSL repeater. The FEXT here can
have a catastrophic effect on the victim DSL service if the repeater is close to the
victim transceiver.
A vast number of measurements of crosstalk were taken in the 1970s and 1980s to
obtain statistical information about the crosstalk [20]. In DSL systems, the commonly
adopted crosstalk models for NEXT and FEXT are, respectively,
|HNEXT (f)|2 ≈ 10−14f3/2

10 CHAPTER 1. INTRODUCTION
CO
NT
NT
(c)
LT
LT
FEXT
T1/HDSL Repeater
CO
NT
NT
(a)
LT
LTFEXT
CO NT
NT
(b)
LT
LT
FEXT
ONU
Figure 1.7: FEXTs in three different loop topologies.

1.2. NOISE ENVIRONMENT FOR DSL SYSTEMS 11
and
|HFEXT (f)|2 ≈ |Hchannel(f)|2 × 10−20f2l,
where l is the loop length in meters and Hchannel is the loop channel response. These
models conform very well with the 1% worst-case rule, which means the value from
the models is worse than 99% of the actual UTPs environment [21]. These models
are also veriÞed independently by the data from Bellcore Inc. [22]. The current DSL
design and test procedures are all based on these models. However, the models are
too pessimistic for most real scenarios. It would be much better for the DSL systems
to adapt to the individual crosstalk environment. This requires the actual knowledge
of the crosstalk coupling functions, which can be obtained by the method proposed
in this dissertation.
It is worthwhile to clarify some terminology. Self-FEXT to a pair refers to the
FEXT from other pairs with the same types of service. The name is somewhat
misleading because it seems to suggest that the FEXT comes from itself. In fact,
Bingham [23] suggests to use the term of kindred-FEXT. Likewise for self-NEXT.
In this dissertation, the terms of self-FEXT and self-NEXT are used in order to be
consistent with the terminology used in most standard recommendations, even though
they are not precise. Alien-FEXT to a pair refers to the FEXT from other pairs with
different types of services. For example, HDSL FEXT is an alien-FEXT to an ADSL
service. Likewise for alien-NEXT.
1.2.2 Radio Frequency Interference (RFI)
The twisted-pair telephone lines, especially the aerial segment such as the drop wires,
can act like antennae. Because of the line imbalance, DSL receivers will sense the
external RFI, known as ingress. The ingress model is studied in [24]. Conversely,
the imbalanced lines can emit DSL signals unequally that cause interference to the
external RF receiver, known as egress. AM radio and amateur radio (�HAM�)
are two common RF sources that overlap frequency with DSL systems. AM radio
operates in the frequencies ranging from 560 kHz to 1.6MHz. The AMRFI can impact
many of the DSL services. The ingress level could be larger than the crosstalk level,

12 CHAPTER 1. INTRODUCTION
therefore it can not be ignored by the designer. HAM radio operates in the frequency
above 1.8 MHz and generally affects only VDSL systems. The HAM transceiver
has large transmit power and may be close to the VDSL transceiver. Therefore, it
could saturate the analog front ends of VDSL receivers. Several methods [25][26] are
proposed to cancel the HAM RFI.
1.2.3 Impulse Noise
Impulse noise is short-term nonstationary interference from varied sources, for ex-
ample, lighting strikes, power lines, switching transients of machinery, arc welders,
and so on. There is no standard model for impulse noise because of its diverse na-
ture. A widely used model is the Cook pulse model [27], proposed by John Cook of
British Telecom. DSL systems generally have 6 dB design margin to partially avert
the problem caused by impulse noise.
1.3 Systems Management
Many types of DSL systems coexist in the same cable. They cause interference to
each other, especially in the same binder group. It is in the best interest of service
operators to be able to manage the systems economically, such that a maximum num-
ber of services can be deployed without compromising the reliability and availability
of the services. System management mainly includes spectral compatibility between
different systems, diagnosis of the system when it breaks down, and provisioning of
new services. To better manage the system, the crosstalk functions among the pairs
need to be identiÞed, which is one of the topics in this dissertation.
1.3.1 Unbundling Process
The local telephone infrastructure belongs to the incumbent local exchanger carrier
(ILEC), which is the traditional local phone company. To stimulate competition, the
regulators in many countries force the ILECs to open their infrastructure to other
service providers, which are known as competitive local exchangers carrier (CLECs).

1.3. SYSTEMS MANAGEMENT 13
ILEC DSLAM
CLEC DSLAM
CO
Customer
CustomerUTP cable
DSLAM: DSL access multiplexor
Figure 1.8: Coexistence of ILEC and CLEC.
As a result, many operators can offer different DSL services through the pairs in
the same binder group, which makes system management even more complicated.
There is an excellent article [28] that describes the background and the impact of the
unbundling process.
CLECs can lease part of the CO and place their equipment there. Figure 1.8
shows one possible conÞguration of the coexistence of the ILEC and CLEC services.
Because the space in the CO may be unavailable or too expensive, CLECs can also
choose to put their equipment close to the CO and connect them to COwith dedicated
lines.
1.3.2 Spectral Compatibility
To ensure that all DSL systems work together, the crosstalk level generated by dif-
ferent DSL systems must be limited. This is done currently by controlling the power
spectral density (PSD) of the transmitted signals from different services. The common
practice is that a new service should not be more invasive than any existing service
would be to itself. In the DSL family, newly deployed services generally have wider
bandwidth but with lower PSDs. There is a draft standard for spectral management
[29] that speciÞes the PSDs of different systems.

14 CHAPTER 1. INTRODUCTION
All these speciÞcations on spectral compatibility rely on 1% worst-case crosstalk
models, which do not necessarily reßect the individual scenario in different loop plants.
Besides, it is very difficult to enforce both ILEC and CLEC operators to comply to the
standard if it is not mandated by the Federal Communications Commission (FCC).
This dissertation proposes a novel idea that an impartial third-party is established to
identify real crosstalk functions and monitor the PSDs from the modems belonging
to the same or different operators.
1.3.3 Maintenance, Diagnosis, and Provisioning
Maintenance of DSL systems is much more costly than the equipment itself. ITU
creates a special telecommunication management network model (TMN) to facilitate
the management of telecommunications networks. Interested readers are referred
to ITU-T recommendation M.3000 [30] for the overview of TMN recommendations.
Nonetheless, in the current stage it is very difficult to diagnose the systems if one DSL
service breaks down, since the real crosstalk environment around the disrupted line
is unknown. This dissertation presents techniques that solve this diagnosis problem
by determining which lines are the dominant crosstalkers to the disrupted line.
For the operators (ILEC and CLEC), more subscribers imply more revenue.
Unfortunately, not all UTPs are qualiÞed for DSL services. It is very important for
the operators to know which lines are available for provisioning the requested services
and for the future deployments. By knowing the crosstalk environments and the line
characteristics, the operators increase the probability of making the right provisioning
decision without the high expense of sending technicians to the Þeld.
1.4 Outline of Dissertation
Chapter 1 brießy introduced different types of DSL systems, the hostile noise envi-
ronments for DSL systems, and the management aspect of DSL systems. For service
operators, system management is in fact a very challenging task, because the wires in
the same binder group can carry different DSL services (e.g., HDSL, SDSL, ADSL,

1.4. OUTLINE OF DISSERTATION 15
etc.) that may belong to different service operators (ILEC and CLEC). Currently,
DSL deployment relies almost entirely on the assumed 1% worst-case noise models.
The models, however, are far from the real crosstalk environments encountered in a
particular system. Therefore, the real crosstalk environments need to be identiÞed for
better system management. With the knowledge of the crosstalk transfer function,
the detrimental impact of the crosstalk can be also cancelled or mitigated. These
subjects comprise the main theme of this dissertation. The knowledge of crosstalk
transfer functions can also be utilized to control the transmit PSD [31] of different
modems dynamically to improve the overall systems� performance, like the power
back-off method in VDSL systems.
1.4.1 Crosstalk IdentiÞcation
Chapter 2 describes a method to identify the crosstalk transfer function between
different UTPs. With heterogenous DSL systems, the modems of different services
have different sampling rates, which implies that crosstalk functions from different
services are not stationary for a particular DSL receiver. Furthermore, these modems
can belong to different service operators. Without any cooperation between operators,
it is very difficult, if not impossible, to exactly identify the crosstalk transfer function
between the lines belonging to different service operators.
This dissertation brings a novel concept of an impartial central network mainte-
nance center (NMC) that identiÞes the crosstalk functions for all participated oper-
ators and feeds back the identiÞed crosstalk functions to them. The NMC captures
the transmitted and received data from each DSL modem for a pre-deÞned time span.
Essentially, the NMC has the knowledge of both the input and the output data from
different modems, which makes the identiÞcation easier. Unfortunately, since the
DSL modems are not synchronized, the time stamps associated with the data from
different modems have timing offset up to several milliseconds. In other words, the
input data and the output data are not strictly aligned together in time. This timing
offset problem is solved here by a cross-correlation technique that crosscorrelates the
input data and the output data and seeks for a peak.

16 CHAPTER 1. INTRODUCTION
The process of the crosstalk identiÞcation for a particular receiver is summarized
in the following four steps:
1. An NMC captures the data from different modems for a pre-deÞned time dura-
tion;
2. Resample the input data according to the clock rate of the receiver;
3. Align the input and the output data using a cross-correlation technique. The
cross-correlation technique can also identify the dominant crosstalkers for a
given line.
4. Estimate the crosstalk function using the least-squares method.
Note that, if there is only one operator, the NMC most likely belongs to the
operator.
1.4.2 Crosstalk Cancellation
Chapter 3 describes two methods to cancel or mitigate one (dominant) crosstalker
into ADSL downstream transmission. The downstream receiver is more vulnerable
than the upstream to crosstalk because the signal is severely attenuated at the higher
frequencies. ADSL service is the most widely deployed DSL service. Currently it has
several millions of subscribers, and the number is expected to double in the next two
years. Crosstalk from HDSL, HDSL2, SDSL, T1, and their repeaters can disrupt an
ADSL downstream service. Mitigating crosstalk can increase the ADSL downstream
data rate and/or the line reach (i.e., the customer coverage area).
The methods proposed here exploit the fact that crosstalk has a large excess
bandwidth and its spectrum is strongly correlated between the main lobe and the
excess band. The crosstalk signal can be estimated in some frequency bands (e.g.,
excess band) and cancelled in other bands (main lobe). The two methods are :
1. Decision-aided cancellation. The crosstalk signal is estimated in some frequency
bands and then decoded according to the constellation of the crosstalk signal

1.4. OUTLINE OF DISSERTATION 17
(such as 2B1Q). This method has the disadvantage of error propagation, because
the decision error can worsen the negative impact on the residual error.
2. Minimum-mean-squares-error (MMSE) estimation and cancellation. The crosstalk
signal is estimated in some bands by the MMSE method, and the estimated
value is directly used to cancel the crosstalk without decoding. The method is
extended to cancel multiple crosstalkers.
This dissertation also provides a guidance on how to select the right frequency
bands to observe the crosstalk signal and an intuitive explanation of the crosstalk
cancellation process. The analysis on the residual error by the MMSE method reveals
two most interesting results. If the crosstalk signal is estimated in the main lobe, the
crosstalk in the excess band can be virtually eliminated. However, if the crosstalk
signal is estimated in the excess band, the signal to interference and noise ratio (SINR)
improvement in the main lobe is approximately equal to the crosstalk signal to noise
ratio in the excess band.
A fast algorithm is then proposed for practical implementation, with relatively
small degradation of system performance. This algorithm avoids large matrix in-
version and multiplication in each transmission block, which is typical for MMSE
estimation.
1.4.3 Multiuser Water-Þlling Algorithms
Chapter 4 detours from the crosstalk identiÞcation and cancellation problems to the
spectrum optimization problem for a Gaussian multiaccess channel (MAC). This
chapter is not strongly related to DSL systems and thus can be considered as a stand-
alone portion of this thesis. The mathematical expression for the optimum PSDs for
a Gaussian MAC with intersymbol interference (ISI) has been known for about two
decades. This chapter describes some practical algorithms that calculate the opti-
mum PSDs with low computational complexity. The Þrst algorithm is proposed for
a two-user channel with equal priorities. The second algorithm is an extension of the
Þrst algorithm and calculates the PSDs for K (K > 2) users with equal priorities.
The last algorithm is again for a two-user channel but with different user priorities,

18 CHAPTER 1. INTRODUCTION
which can be used to obtain the capacity region. These algorithms have the potential
to be used for adjusting the transmit PSDs for a Gaussian MAC with ISI.
1.5 Research Contributions
The main theme of this dissertation is crosstalk identiÞcation and cancellation in DSL
systems. This dissertation also includes a topic on PSD optimization for different
users in a Gaussian MAC with ISI. To summarize, my research contributions towards
my Ph.D. degree include:
1. We are the Þrst to propose a concept of an impartial network maintenance center
(NMC) and a method that identiÞes the crosstalk functions among the twisted
pairs of wires in the DSL systems. This method includes data capturing via
an NMC, resampling for different services, data alignment via cross-correlation,
and the crosstalk function estimation through the least-squares method. The
information about the crosstalk functions can be utilized in many aspects. Ap-
plication examples include ensuring spectral compatibility of different systems,
system diagnosis and provisioning, and improvement of the overall systems�
performance by dynamic spectral management (e.g., power back off methods in
VDSL systems) or multiuser detection. This work is to appear in [32].
2. We are the Þrst to propose the two methods here for cancellation or mitigation
of one dominant crosstalker into an ADSL downstream receiver. The methods
estimate the crosstalk signal in some frequency bands and cancel it in other
frequency bands. This is possible because the crosstalk signal has a large excess
bandwidth and there is strong spectral correlation between the excess and main
bands. We also provide an intuitive error analysis on the residual error resulting
from the MMSE estimation and cancellation method. The analysis leads to an
important guidance to select the right frequency bands to observe the crosstalk
signal. A fast algorithm is also derived for practical implementation with a
small performance loss. This work has been submitted for publication [33].

1.5. RESEARCH CONTRIBUTIONS 19
3. We proposed three novel water-Þlling algorithms for a Gaussian MAC with ISI.
These algorithms can be used to compute and adjust efficiently the optimal PSD
for each user. The work Þrst appeared in [34][35]. A comprehensive version of
the work has been submitted for journal publication [36].

Chapter 2
Crosstalk IdentiÞcation
2.1 Introduction
Digital subscriber line (DSL) technology uses the existing unshielded twisted pairs of
telephone lines to provide high-speed data transmission services to both the residential
and business customers. One major impairment of the current DSL systems is the
severe crosstalk [37] among the telephone lines in the same or neighboring bundles.
The severe crosstalk not only limits the maximum data rate of any individual line,
but can also degrade the existing services if a new service is added to the bundle.
Currently DSL system deployments uniformly assume the worst crosstalk scenario
to prevent the breakdown of the system. However, this assumption is often too
pessimistic in a real scenario and hence limits the overall performance of the system.
There are several overwhelming beneÞts to identifying the crosstalk coupling
functions among the telephone lines. First, the crosstalk functions can be used for a
multi-user detector [33][38][39] in the modem to cancel the strong interference from
other lines. Second, it can improve the data rate (or the line reach) of the systems by
enforcing a better spectrum assignment for different users. For example, if one user
causes strong crosstalk to another user in a particular frequency band, one possible
solution, other than multiuser detection, is that the interfering modem just does not
transmit signal in this frequency band. Third, the crosstalk proÞles are invaluable for
the telephone operators to maintain, diagnose, and expand the current systems. For
20

2.1. INTRODUCTION 21
example, if an existing DSL modem breaks down, the crosstalk proÞles can make it
much easier to uncover the potential cause of the disruption.
However, it is very difficult to identify the crosstalk functions among the copper
wires because the services on these lines could belong to different operators as a re-
sult of the unbundling process and regulatory action [28] undertaken in many parts of
the world. For example, in the United States and some other countries, competitive
local exchange carriers (CLECs) can lease the telephone lines from incumbent local
exchange carriers (ILECs, the traditional phone companies) and offer DSL services
to the local subscribers. Consequently, the transmitted signals from different opera-
tors� modems are completely asynchronous. Even within the services offered by the
same operator, different types of services (HDSL, ADSL, ISDN, etc.), having different
symbol rates, are offered in the same bundle.
In the multi-operator environment, one of the major concerns is spectral com-
patibility between the signals used for transmission by different operators. This com-
patibility issue is fundamentally determined by the crosstalk level caused by different
users. There must be some level of coordination and agreement in which all opera-
tors� interests are fairly considered. Therefore, this chapter proposes a new concept
of an impartial network maintenance center (NMC) in which crosstalk identiÞcation
is processed and the spectra from different users are monitored. This NMC collects
the transmitted signals and the received signals from each modem for a predeÞned
time span. The details on how to obtain these signals are given in Section 2.2.
Because the modems in the same bundle could belong to different service oper-
ators (CLECs and ILEC), the time stamps associated with the signals from different
operators� modems could be offset by several milliseconds. Therefore, the Þrst step
of data processing is to resolve the timing differences between the transmitted signals
from different users and the received signal into one designated receiver. Since the
timing difference could be greater than one thousand data symbols, a cross-correlation
technique, which has low computational complexity, is used here to match the trans-
mitted signals of the crosstalkers to the received signals. This method can estimate
the timing difference coarsely up to a resolution of several data symbols. The cross-
correlation technique can also Þnd the strong crosstalkers for a given line. The second

22 CHAPTER 2. CROSSTALK IDENTIFICATION
step is to use a least-squares estimator to jointly identify the strong crosstalk functions
and the Þner scale of the timing difference. The performance of these two techniques is
analyzed to determine the number of transmitted data symbols needed for identiÞca-
tion. If the crosstalk and the primary signal belong to different types of services (e.g.,
ADSL and HDSL), they have different symbol rates and thus the crosstalk function is
time-varying. A resampling scheme for the transmitted signals is described to ensure
the stationarity of the crosstalk function. In order to Þnd low power crosstalkers, a
successive cancellation method is needed to cancel the strong crosstalk signals before
the cross-correlation is applied to them. Otherwise the cross-correlation value may
be too small to resolve the timing difference.
This chapter is organized as follows. Section 2.2 describes the concept of the
network maintenance center and the model for crosstalk identiÞcation. Section 2.3
presents a solution that combines the cross-correlation technique and the least-squares
estimator to identify the crosstalk functions. The performance is analyzed and a re-
sampling scheme to ensure the stationarity of the channel for different types of ser-
vices is described. Simulation results are shown in Section 2.4 to verify the proposed
techniques. Section 2.5 concludes the chapter.
In this chapter, the notations are arranged with the following conventions. A
normal letter, a bold letter, and a capital letter represent a scalar, a vector, and
a matrix, respectively. The superscript symbols T and ∗ represent �transpose� and
�conjugate and transpose� operations, respectively. The normal symbol ∗ representsthe convolution operation.
2.2 Impartial NetworkMaintenance Center (NMC)
The generic crosstalk model of the DSL systems for a given receiver is shown in
Figure 2.1. The objective is to identify the crosstalk functions for the receiver. The
crosstalk includes the near-end crosstalk (NEXT) and the far-end crosstalk (FEXT)
[37]. NEXT, if it exists, is generally much larger than FEXT. Therefore, in ADSL and
VDSL systems, frequency-division duplexing is used to avoid NEXT. Nevertheless,
NEXT may still exist from other types of services like ISDN, HDSL, HDSL2, SDSL,

2.2. IMPARTIAL NETWORK MAINTENANCE CENTER (NMC) 23
Channel h0
Crosstalkfiltering h1
Crosstalkfiltering hk
Xmit 0
Xmit 1
Xmit K
noise
+ Rcvr 0yx0
x1
xK
Figure 2.1: Network model of DSL systems for one receiver.
and SHDSL.
It is much easier to identify the crosstalk if the transmitted signals and the
received signals are both known. Based on this observation, an impartial NMC is
proposed in which the transmitted signals and the received signals during a given
time span from all modems are available for the coupling function identiÞcation. This
level of coordination is necessary and can be achieved by setting up a standard, which
suggests that each operator captures the data that ßows through each modem during
a predeÞned time period and sends them to the NMC. For example, in the central
office site, all service operators have their own DSL access multiplexers (DSLAMs)
[2] which can be used to collect the transmitted and received data in each modem
during a certain time period. The collected data is then sent to the NMC via internet
or some other means for processing. In the customer site, the modem has to store
the transmitted and received data packets and send them to the NMC. Because the
line characteristics do not change very much, these data packets can be sent either
offline when the modems are idle or via low-speed diagnostic channels currently used
in most DSL modems. The location of the NMC is not conÞned to the central office.
In return, the crosstalk functions obtained from the NMC are fed back to different
service operators who may use this information for various purposes, such as spectrum

24 CHAPTER 2. CROSSTALK IDENTIFICATION
time
di Lt +1
xi(0) xi(di) xi(Lt)
y(0) y(Lt)
Figure 2.2: Timing offset between the transmitted signals and the received signals.Lt is the length of the pre-deÞned observation time span.
management, system diagnosis or expansion. These identiÞed crosstalk functions also
provide an essential initial condition for a multiuser detector to track the crosstalk
response.
The time stamp of each modem from different operators relies on the central
office clock. Unfortunately, these time stamps are not accurate and the difference
can be as large as several milliseconds. Consequently, the predeÞned time spans
from different modems are not strictly aligned together. Besides, the propagation
delays are not equal from different crosstalk sources to the receiver of interest and
this effect should also be included in the timing differences, although the differences
of the propagation delays are generally much smaller than the differences of the time
stamps. Without loss of generality, all transmitters are assumed to have nonnegative
timing difference (di ≥ 0) with respect to the time stamp of the designated receiver,as shown in Figure 2.2. Note that the timing difference di is represented in terms of
the clock cycles of the receiver and it has an integer value. The fractional portion
of the delay is absorbed into the channel/crosstalk response. The received output is
then
y(m) =KXi=0
hi(m) ∗ xi(m+ di) + n(m) (2.1)

2.3. CROSSTALK IDENTIFICATION 25
where xi: the ith transmitted signals
hi : the channel response (i = 0)
or the crosstalk function (i > 0)
di : the timing difference, integer value
n : white Gaussian noise with variance σ2nK : number of crosstalkers.
The main problem is to Þnd the crosstalk functions hi, given the known transmit-
ted signals xi, the received signals y, and the statistics of the noise n. In general, the
channel response ho(m) is known and do equals zero because the transmitter and the
receiver in both ends of the same channel are synchronized. As a result, the signal
component can be subtracted from the received signal. In the rest of this chapter,
only the crosstalk signals are considered.
2.3 Crosstalk IdentiÞcation
Since the timing differences di could correspond to several thousand symbols, it is
computationally prohibitive to apply the classical least-squares method directly to
(2.1) because it requires the multiplication and inversion of large matrices. Therefore,
the cross-correlation technique is Þrst used to estimate the timing differences di of
the dominant crosstalkers. Then the crosstalk functions are identiÞed by the least-
squares estimator and the crosstalk signals are subtracted from the received signal.
The subtraction of the dominant crosstalk signals makes it easier to estimate the
timing difference of the smaller crosstalk signals. This successive cancellation process
is repeated until all interested crosstalk functions are identiÞed.
The performance of the cross-correlation technique is analyzed to determine the
number of symbols required for estimation of the timing differences. Similarly, the
performance analysis of the least-squares estimator is studied to determine the trade-
off between the estimation error and the number of data symbols. The classical result
of the least-squares estimator focuses on the residual error [40, p. 32]. This chapter
takes a different perspective by analyzing the error of the estimated parameter itself
and exploits the well-known results in the multivariate statistics area of the inverted

26 CHAPTER 2. CROSSTALK IDENTIFICATION
Wishart function [41] [42].
2.3.1 Timing Difference Estimation
The cross-correlation technique has been used to estimate the time delay of arrival
(TDOA) [43]. The problem posed here is different in that there are many crosstalkers,
which have unknown responses hi with many taps. The exact delay estimation is not
required in this step. Instead, only coarse estimation of the timing differences di is
pursued.
The cross-correlation is deÞned as
Ryxi(l) = E{y(m)x∗i (m+ l)}. (2.2)
Assume that the transmitted signals from different users are independent and have
zero mean, i.e., E(xix∗j) = 0 for i 6= j and E(xi) = 0. The noise is uncorrelated
with all users� signals. The number of taps for hi is assumed to be νi + 1. Then by
substitution of y(m), (2.2) can be rewritten as
Ryxi(l) =νiXt=0
hi(t)Rxi(l − di + t) (2.3)
whereRxi is the autocorrelation function of xi. In the ideal case where the transmitted
signals xi are uncorrelated and have an average energy of εi, i.e., Rxi(k) = εiδ(k),
Ryxi(l) = εihi(di − l). (2.4)
Because the crosstalk function is a causal Þnite impulse response (FIR), the timing
delay di can be estimated by the maximum ld such that |Ryxi(ld)| > 0. Unfortunately,the autocorrelation of the transmitted signals is rarely a delta function in DSL systems
and can only be obtained approximately by averaging over a large number of data
samples. Therefore, it is difficult to identify the crosstalk function directly from
(2.3). Nevertheless, it is possible to use this equation to roughly estimate the timing

2.3. CROSSTALK IDENTIFICATION 27
difference di by searching for the peak of |Ryxi(l)|, i.e.,
�di = argmaxl|Ryxi(l)|. (2.5)
The applicability of this method is strongly justiÞed by the following two observations:
1. The transmitted signals are very loosely correlated, the auto-correlation func-
tion Rxi(k) is almost equal to zero if k is larger than several symbols;
2. hi(t) is an FIR Þlter with a narrow peak in the time domain.
The cross-correlationRyxi is approximated by averaging over many data samples,
�Ryxi(l) =1
N
NXm=1
y(m)x∗i (m+ l) (2.6)
where N is the total number of the data symbols used for averaging. The compu-
tational complexity of this method is approximately O(Ndi) for user i. The number
of data symbols N should be carefully selected to achieve a good trade-off between
the computational complexity and the accuracy of the estimation. In the rest of this
subsection, the rough estimation of N is discussed.
The mean of the cross-correlation �Ryxi is
E( �Ryxi(l)) = Ryxi(l).
The variance of the cross-correlation Ryxi is (see Appendix A for details)
σ2R = var( �Ryxi(l))
≈ εiN
ÃKXj=1
εj||hj||2 + σ2n!. (2.7)
where ||hj|| is the Euclidean norm of the crosstalk function hj(t). This above approx-imation is surprisingly simple in that user j contributes εiεj||hj||2/N to the variance.
To detect the peak value of cross-correlation | �Ryxi(l)| reliably, the ratio of the peak

28 CHAPTER 2. CROSSTALK IDENTIFICATION
to the standard deviation can be set to a large value, a, so that
maxl
¯�Ryxi(l)
¯σR
> a.
This is equivalent to
N &a2εi
³PKj=1 εj||hj||2 + σ2n
´³maxl
¯�Ryxi(l)
¯´2 .
If the crosstalk signals are assumed to have the same energy and the transmitted
signals are temporally uncorrelated, the inequality can be further simpliÞed using
(2.4) to the following form:
N &a2³PK
j=1 ||hj||2 + σ2n/εi´
³maxν|hi(ν)|
´2 , (2.8)
which provides a good guidance for the selection of a reasonable number for N . In
typical DSL system models, the background noise is assumed to have power spectral
density (PSD) of −140 dBm/Hz. Let us consider two special cases, where a = 10 andthe background noise is ignored.
Example 1 Suppose there are 10 crosstalkers that have the same order of magni-
tudes, i.e., ||hj|| ≈ ||hi|| for all j. Then N ≈ a2K = 1000, based on (2.8).
Example 2 Suppose that crosstalker 2 is dominant and is 20 dB above the others,
i.e., ||h2|| ≈ 10||hj||, j 6= 2. Then for crosstalker 2, N ≈ a2 = 100. However, to
estimate the timing offset of other crosstalkers, N ≈ ||h2||2a2/||hj||2 = 10, 000. If
there is not enough data available, the dominant crosstalkers need to be canceled Þrst
and the timing difference estimation for others is then performed afterwards.
2.3.2 Crosstalk Functions Estimation
After the timing differences di between the crosstalk signals and the received signals
are grossly estimated, the crosstalk functions and the more accurate timing differences

2.3. CROSSTALK IDENTIFICATION 29
can be obtained jointly by a least-squares estimator. In fact, if some crosstalk signals
are too small, the timing differences found through cross-correlation may not be
accurate enough for the least-squares estimator. Depending on the objective, the
receiver can either ignore these small crosstalkers or identify them by Þnding Þrst the
strong crosstalk signals and subtracting them from the received signal.
Least-squares Estimation
Let us denote the timing estimation error from the cross-correlation technique by
∆i = di − �di, and the shifted input by zi(m) = xi(m + �di). The crosstalk network
model can be rewritten as
y(m) =KPi=1
hi(m) ∗ zi(m+∆i) + n(m) (2.9)
where the notation is the same as in the original model (2.1). The difference is that
the timing difference ∆i in the new model is much smaller than di in the original
model, which makes it simpler to use the least-squares method.
In the ideal case where the transmitted signals are uncorrelated (Rxi(m) =
εiδ(m)), ∆i is the tap number where the absolute crosstalk response |hi(∆i)| hasa peak value. In practice, the transmitted signals are weakly correlated, therefore
∆i should be in the vicinity of the tap where the absolute crosstalk response is max-
imum. Mathematically, ∆i ≈ argmaxm(|hi(m)|) and 0 ≤ ∆i ≤ νi. Note that the
exact length of the crosstalk response (νi+1) is unknown. Fortunately, a vast number
of measurements of the actual crosstalk transfer functions in the Þeld have been taken
in the past to obtain the statistical behavior of the crosstalk. From measured results,
an upper bound on the tap number is empirically available, which can be used to
approximate νi.
The basic idea for joint detection of the crosstalk response and the delay is
explained in the following three steps:
1. assume the length of the crosstalk response to be 2νi + 11 in order to include
the effect of the timing offset ∆i;1If 0 ≤ ∆i ≤ c, then the crosstalk response is extended to νi + 1+ c.

30 CHAPTER 2. CROSSTALK IDENTIFICATION
2. use the least-squares estimator to estimate the crosstalk response of length
2νi + 1;
3. determine those taps whose coefficients are almost equal to zero in the head and
the tail of the crosstalk response, which can be used to Þnd the timing offset
∆i. By truncating these taps, the crosstalk response is obtained.
The matrix representation of (2.9) can be written as
y=hZ1 Z2 . . . ZK
i
h1
h2
...
hK
+ n
= Z·h+ n (2.10)
where y is the received signal vector, Zi ∈ CN×(νi+1) the transmitted Toeplitz datamatrix, hi the crosstalk response vector, i = 1, . . . ,K, and n the white Gaussian
noise vector. SpeciÞcally,
y=hy(N − 1) y(N − 2) . . . y(0)
iTZi=
zi(N − 1− νi +∆i) · · · zi(N − 1 +∆i)
.... . .
...
zi(−νi+∆i) · · · zi(∆i)
hi =
hhi(νi) hi(νi−1) · · · hi(0)
iT(2.11)
where N is the number of data samples. Since ∆i ∈ [0, νi], each row of the datamatrix Zi and the crosstalk response vector hi can be extended in both directions,

2.3. CROSSTALK IDENTIFICATION 31
i.e.,
hi= [hi(νi+∆i) · · ·hi(νi) · · ·hi(0) · · ·hi(∆i−νi)]T
Zi=
zi(N − 1− νi) · · · zi(N − 1+νi)
.... . .
...
zi(−νi) · · · zi(νi)
(2.12)
where Zi ∈ CN×(2νi+1) and hi ∈ C(2νi+1)×1. The same notation is used in (2.11) and(2.12) to simplify notation. Note that hi are padded with ∆i zeros on the top and
νi −∆i zeros in the bottom. From (2.10), the unbiased estimation of h is given [44]
by
h = (Z∗Z)−1Z∗y (2.13)
where ∗ represents conjugate and transpose. Truncation of those taps corresponding
to relatively small values in both sides of the vector hi yields the crosstalk response
and the timing offset∆i. For fast algorithms that calculate (2.13) utilizing the (block)
Toeplitz structure of the data matrix, see [45][46] and the references therein.
Performance Analysis
In this subsection, the estimation errors of the crosstalk responses are analyzed with
respect to the number of data symbols N . The covariance matrix of the estimated
response h can be computed as
cov(h) = E(h− h)(h− h)∗ = σ2n(Z∗Z)−1 (2.14)
where σ2n is the noise variance. Let�s denote L = Z∗Z and the i-th row of the data
matrix Z as zi, i = 1, . . . , N. Suppose all rows zi (i = 1, . . . , N) are distributed
independently, each according to the normal distribution2 N(0,Σ). Then L has the
Wishart distribution [47] with a covariance matrix Σ and M dimensions, where M is
2It should be noted that there are two approximations in using the results of the inverted Wishartfunction. First, the data is not really normally distributed. Second, the adjacent rows of the datamatrix are not exactly independent.

32 CHAPTER 2. CROSSTALK IDENTIFICATION
the number of columns inZ, i.e., the number of taps to be estimated. Correspondingly,
L−1 has the inverted Wishart distribution. The DSL systems considered here use
baseband transmission. Therefore, the data matrix Z contains only real elements.
The Þrst and the second moments of the inverted real Wishart function L−1 (N >
M + 3) are [41]
E(L−1) =1
N −M − 1Σ−1
E(lijlrs)=(N −M − 2)σijσrs+σirσjs+σisσjr(N −M − 3)(N −M − 1)(N −M)
(2.15)
where the elements of an inverted matrix are denoted by the symbols with superscript,
for example, lij and σij denote the (i, j) entry of the inverted matrices L−1 and Σ−1,
respectively. The input signals are assumed to be white and uncorrelated between
different users. If we scale different users� transmitted energy to 1 (εxi = 1), then
Σ = I. The normalized sum of the squared estimation errors is
eh =trace(cov(h))
σ2n.
The mean and the variance of eh follow directly from (2.15)
E(eh) = trace(E(L−1))
=M
N −M − 1 (2.16)
var(eh) =2M(N − 1)
(N −M − 1)2(N −M)(N −M − 3)≈ 2M
N3, if N ÀM. (2.17)
Several interesting observations are extracted from the expression above.
� The sum eh of the squared estimation errors is reduced asymptotically by 1/N
in the mean sense.

2.3. CROSSTALK IDENTIFICATION 33
� If N = 2M + 1, eh equals 1 in the mean sense. The standard deviation of
eh approximately equals 2/M, which is relatively small when M is large (e.g.,
M > 10). This suggests that the sum of the squared estimation errors is almost
same level as the noise.
� When N is large, the standard deviation of eh approaches 0 in the order of
N−1.5.
Therefore, to keep the estimation error equal to the noise level, the number
of data symbols needed is about twice the number of the estimated parameters.
Doubling the amount of data reduces the estimation error by 3 dB. For the case of
a complex input data matrix Z, the equations for the Þrst and the second moments
of the inverse Wishart function are slightly different [42], but the above rule is also
applicable.
Recall that we extend the length of each crosstalk channel to 2νi+1 in order to
jointly estimate the channel response and the timing offset ∆i. After the estimation,
we truncate the head and the tail of the channel response hi to obtain the actual
channel response. Since the timing offset ∆i is now known, we can apply the least-
squares estimator again to solve the real channel response hi with a narrower matrix
Z. The new data matrix Z has size N × �M , where �M =PK
i=1 νi + 1 ≈ M/2.
Therefore, with the same amount of data, the error is reduced by 3 dB.
Comments on Successive Cancellation
In order to estimate the timing differences for small crosstalkers, it is necessary to Þrst
estimate and cancel the strong crosstalk signals. However, the residual error, resulting
from cancellation of the strong crosstalk signals, may be about the same power as the
smaller crosstalk. Therefore, the previously canceled strong crosstalk signals should
be estimated jointly with the smaller crosstalk signals for the least-squares estimation
in order to reduce the estimation errors of the smaller crosstalk functions. Otherwise,
a large number of data symbols is needed to estimate the smaller transfer functions
because doubling the number of data symbols only reduces the estimation error by
3 dB. The following is an example to illustrate the point.

34 CHAPTER 2. CROSSTALK IDENTIFICATION
Tx Filterp(t)
xTalkh(t)
Rcvr Filterhlp(t)1/T
al1/T'
yxc(t)
Figure 2.3: A baseband crosstalk model.
Example 3 Suppose an xDSL system has two crosstalkers. Crosstalkers 1 and 2
have PSD levels of −100 dBm/Hz and −120 dBm/Hz, respectively. The backgroundnoise has PSD level of −140 dBm/Hz. The signal of crosstalker 1 is estimated andcanceled Þrst. The residual error is assumed to be −122 dBm/Hz. Now if the signalof crosstalker 2 is estimated by treating the residual error as noise, it would need
about 28(ν2 + 1) data symbols to reduce the estimation error down to −143 dBm/Hz,according to the analysis in Sec. 2.3.2. In contrast, if the signals of crosstalkers 1 and
2 are estimated together, it needs only 2(ν1+ν2+2) data symbols, where νi+1, i = 1, 2,
are the tap numbers.
2.3.3 Resampling for Different Services
As mentioned in the introduction, many different services exist in the same bundle
of the telephone cables and have different sampling rates. Therefore, the discrete
(sampled) crosstalk function will vary with time if the receiver and the crosstalk
transmitter belong to different services and have different symbol rates. However, if
we can resample the transmitted signals with the same clock as in the receiver, the
crosstalk function is stationary because it reßects the physical conÞguration of the
lines. Figure 2.3 shows a typical baseband crosstalk diagram in the DSL systems,
where p(t), h(t) and hlp(t) are the transmit Þlter, the crosstalk response, and the
receiver low pass Þlter respectively. The sampling rates for the transmitter and the
receiver are 1/T and 1/T 0, respectively. The transmitted continuous time signal is

2.3. CROSSTALK IDENTIFICATION 35
xc(t) =N−1Pl=0
alδ(t− lT − τ) ∗ p(t)
where T is the sampling period, al the discrete data stream, N the total number of
data symbols to be transmitted, and τ is the fractional delay in terms of the receiver
clock. The received signal before sampling is
yc(t) =N−1Pl=0
alδ(t− lT ) ∗ p(t− τ) ∗ h(t) ∗ hlp(t)| {z }q(t)
+ n(t)
=N−1Pl=0
alδ(t− lT ) ∗ 1T 0sinc
µt
T 0
¶∗ q(t) + n(t)
=1
T 0N−1Pl=0
alsinc
µt− lTT 0
¶| {z }
x(t)
∗ q(t) + n(t) (2.18)
where q(t) is the aggregated crosstalk function of concern and x(t) is the re-constructed
transmitted signal. The second equation above follows from the fact that yc(t) is not
changed by multiplying by another low-pass Þlter 1/T 0sinc(1/T 0) if the receiver low-
pass Þlter hlp is ideal. The bandwidth of the crosstalk function q(t) is determined by
the smallest bandwidth of p(t), h(t), and hlp(t). In other words, the identiÞable band
of the crosstalk is limited by the smallest frequency band of the crosstalk signal, the
crosstalk channel response, and the receiver Þlter. After sampling at a rate of 1/T 0,
we obtain the discrete received signal
y(m) = x(m) ∗ q(m) + n(m)
where
x(m) =N−1Pl=0
alsinc
µm− lT
T 0
¶. (2.19)
Since both x(t) and q(t) have a bandwidth less than 1/(2T 0), there is no aliasing after
sampling. The resampling function sinc is not unique, many other functions (e.g., the
raised cosine) can be used as alternative resampling functions.
The resampled signals x(m) are usually non-stationary and correlated. Therefore

36 CHAPTER 2. CROSSTALK IDENTIFICATION
the performance analysis in subsection 2.3.2 should be used cautiously because it is
based on the assumption that the transmitted signals are white. Nevertheless, the
simulation results still suggest the residual error estimation conforms to the result
of (2.16) very well. These results are not so surprising because the signals al before
resampling are white and thus the resampled signals should contain all the necessary
modes to excite all the frequencies of interest. If the transmitted signal is upsampled,
the covariance matrix Z∗Z is close to singular and the least-squares estimator can
not be applied directly. One solution is to expand the bandwidth of the signal x(m)
to the bandwidth of the receiver Þlter during the resampling process. This expansion
of the bandwidth will make the covariance matrix have a good condition number and
cause a negligible effect in the estimation error.
2.4 Simulation Results
This section shows the simulation results of crosstalk identiÞcation in the upstream
direction (from the subscriber to the central office). The receiver of interest is assumed
to be an ADSL modem. To reßect a typical crosstalk environment, the number and
the type of the crosstalkers are assumed to be:
� 4 Basic Rate ISDNs (BRIs)
� 4 HDSLs
� 5 ADSLs.
All twisted pairs are assumed to be 26-gauge (0.4mm) and 9000-feet (2744m)
long. The dominant crosstalk signals consist of NEXT from BRIs and HDSLs. There
is no NEXT from ADSL because most of the deployed ADSL modems use frequency-
division duplexing scheme. The smaller crosstalk signals consist of FEXT from AD-
SLs, BRIs, and HDSLs. Several important characteristics of DSLs are taken from
ITU-T Recommendation G.996.1 [48] and summarized in Table 2.1.
The transmit Þlters (including pulse shaping Þlters) from different types of DSLs
can also be found in [48] or the corresponding standards. For brevity, we denote

2.4. SIMULATION RESULTS 37
DSL ADSL(up) BRI HDSLLine code DMT 2B1Q 2B1Q
Sampling ratefo (ks/ sec)
276 80 392
Power (dBm) 12.5 13.6 13.6
Table 2.1: DSL Characteristics
them as P (f) and omit their mathematical formula here. The model for NEXT is
commonly known as
|HNEXT (f)|2 ≈ 10−14f3/2.
The model for FEXT is
|HFEXT (f)|2 ≈ |Hchannel(f)|2 × 10−20f2l,
where l is the loop length in meters and Hchannel is the loop channel response. Un-
fortunately, these models do not provide the phase information. We assume all the
crosstalk transfer functions have a linear phase. The interested NEXT and FEXT
functions are, respectively,
QN(f) = PDSL(f)HNEXT (f)Hlp(f)
QF (f) = PDSL(f)HFEXT (f)Hlp(f)
where Hlp is the receiver low-pass Þlter and PDSL(f) is a generic term for the trans-
mitter Þlter response of BRIs, HDSLs and ADSLs. The magnitudes of NEXT and
FEXT are plotted in Figures 2.4-2.5. NEXT is about 20 dB above FEXT.
In the simulation, each crosstalk signal is transmitted with a random timing
offset with respect to the ADSL receiver. This integer offset is uniformly distributed
in the range of [0, 500]. The fractional delay is absorbed into the crosstalk function
as described in (2.18). We identify NEXT Þrst. The cross-correlation technique is
used to coarsely estimate the timing offsets di. Figure 2.6 shows the absolute cross-
correlation value for one HDSL NEXT. As expected in the example of Section 2.3.1,
the peak value is much higher than the rest of values and gives a good estimate of

38 CHAPTER 2. CROSSTALK IDENTIFICATION
0 50 100 150 200 250-150
-140
-130
-120
-110
-100
-90xDSL induced NEXTs to ADSL upstream
Khz
NEX
Ts P
SD (d
Bm/H
z)
ISDN_NEXTHDSL_NEXTNoise
Figure 2.4: NEXT from HDSL and ISDN. Each curve represents only one crosstalker.

2.4. SIMULATION RESULTS 39
0 50 100 150 200-145
-140
-135
-130
-125xDSL induced FEXTs to ADSL upstream
Khz
FEXT
PSD
(dBm
/Hz)
ISDN_FEXTHDSL_FEXTADSL_FEXTNoise
Figure 2.5: FEXT from ADSL, ISDN, and HDSL. Each curve represents only onecrosstalker.

40 CHAPTER 2. CROSSTALK IDENTIFICATION
the timing offset. With the rough estimated �di, a least-squares estimator is used to
0 100 200 300 400 5000
0.5
1
1.5
2
2.5
3
3.5x 10-6
Offset
Abso
lute
Cro
ss-c
orre
latio
n Va
lue
Cross-correlation for HDSL NEXT (N=1000)
Peak to STD = 12.6
Figure 2.6: Absolute cross-correlation value between the received signal and the HDSLtransmitted signal.
identify the crosstalk responses. Figure 2.7 shows an actual HDSL NEXT function
and its estimate. They almost overlap each other. Figure 2.8 shows the error ehcaused by the crosstalk function estimation error. Clearly, the performance analysis
in Section 2.3.2 is consistent with the result. Note that N = 2M + 1 is a critical
point, whereM is the number of the estimated parameters,M =P8
i=1(νi+1) = 248.
When N > 2M , doubling the number of the data symbols reduces the error eh by 3
dB. However, the error grows rapidly when the number of data is less than 2M.
It may also be interesting to identify the smaller FEXT. Since they are much
smaller than NEXT, NEXT is Þrst identiÞed and canceled from the received signal
y. Then the above two steps can be applied again to Þnd the FEXT functions. The
simulation results are similar and not shown here. It should be noted that we also

2.4. SIMULATION RESULTS 41
0 0.02 0.04 0.06 0.08 0.1 0.12-6
-4
-2
0
2
4
6
8
10
12x 10-7
Time (ms)
Res
pons
e
HDSL Crosstalk Time Responses
Real Response Estimated Response
Figure 2.7: HDSL NEXT time response and its estimate.

42 CHAPTER 2. CROSSTALK IDENTIFICATION
500 1000 1500 2000-140
-135
-130
-125
-120
-115
-110
-105
Number of Data N
Erro
r in
dB
NEXTs Estimation Error
Error Noise +FEXTs
Figure 2.8: The sum of the squared crosstalk estimation error.

2.5. CONCLUSIONS 43
simulated the case where the actual measured NEXT and FEXT data is used. The
results are also consistent with the analysis.
2.5 Conclusions
Crosstalk is a major impairment of DSL systems, which signiÞcantly limits the data
rate and the reach of the twisted pairs. For both ILECs and CLECs, it is invaluable
to identify the crosstalk environment for each pair and thus offer better services to
more users. However, because of the competitive nature of ILECs and CLECs, there
is little coordination between them so far. In this chapter, an impartial NMC concept
is proposed to process the data from all service operators and estimate the crosstalk
functions for them. First, a cross-correlation technique is used to determine which
lines are coupled with a given line and roughly align the time stamp associated with
the data coming from different modems. The amount of data needed for calculating
the cross-correlation is also analyzed to achieve a low computational complexity. Then
a least-squares estimator is used to estimate the crosstalk response and the Þner-scale
of timing offset jointly. The performance of the least-squares estimator is analyzed
by exploiting the results of the inverted Wishart function. This theoretical result can
be used to determine the number of the data samples needed for the estimator. The
simulation results conÞrmed that the proposed techniques can identify the crosstalk
responses very accurately with a reasonable computational complexity.

Chapter 3
Crosstalk Cancellation
3.1 Introduction
One of the major impairments of DSL systems is the severe crosstalk [37] among
the telephone lines in the same or neighboring bundles. The crosstalk is classiÞed
into near-end crosstalk (NEXT) and far-end crosstalk (FEXT). In general, NEXT
is much larger than FEXT because the interference source is closer to the receiver.
Therefore, ADSL and VDSL use frequency division duplexing (FDD) to avoid NEXT
from the same services. However, other types of services (such as HDSL, SDSL, T1,
etc.), which use different duplexing schemes and overlap in frequency with ADSL and
VDSL, may produce detrimental NEXT. Mitigating the effect of NEXT by cancelling
it in a DSL receiver can dramatically increase the data rate, the line reach, or the
system operational margin.
The optimum detector for interference cancellation can be theoretically achieved
by maximizing the a posteriori probability of the primary signal (MAP rule), which is
unfortunately too complex in practice. Some suboptimal multiuser detectors [49][50][38][39]
were proposed to mitigate or cancel the interference signal in the non-spreading sys-
tem. These detectors decode each user�s data using �soft� symbols and iterate the
detection process until a certain criterion is reached (e.g., the maximum number of
iterations). The convergence of this type of the algorithm is an open problem. The
algorithm is still very complex when the signals have large constellation sizes [39].
44

3.1. INTRODUCTION 45
This chapter presents new practical methods to cancel or mitigate one (domi-
nant) NEXT into an ADSL receiver. The principal idea is to estimate the crosstalk
signal in certain frequency bands and subtract it in other frequency bands. A similar
idea [25][26] has been previously used to suppress very narrow band radio frequency
interference (RFI) in VDSL systems. The crosstalk signal into an ADSL receiver
has large excess bandwidth and its spectra in the main lobe and the excess band
are strongly correlated, which gives the opportunity to cancel the crosstalk signal in
some dependent frequency bands. For example, the crosstalk can be estimated in
the excess band and cancelled in the main lobe; or vice versa. This chapter provides
guidance on how to select the best frequency bands to observe the crosstalk signal
and an intuitive interpretation of the crosstalk cancellation process. Another impor-
tant aspect of the proposed techniques is that they can be implemented with low
computational complexity, without matrix inversion or large matrix multiplication in
each transmission block.
Previously, the fractionally-spaced equalizer (FSE) was used to suppress cyclo-
stationary NEXT [51][52] if both the crosstalk signals and the primary signal are
synchronized and have excess bandwidth. The FSE processes the signals� spectrum
in both the main band and the excess band. The folded spectrum after resampling
to the symbol rate then provides the ßexibility to suppress NEXT in the main band.
The problem addressed in this chapter is different mainly in the following two as-
pects. First, the primary signal (ADSL) and the crosstalk signal (such as NEXT
from HDSL, SDSL, T1) have completely different modulation schemes and sampling
rates. Second, the primary received signal is decoded in the frequency domain, thus
the crosstalk signal suppression is also processed in the frequency domain. In fact, the
frequency domain explanation in this chapter provides insight into how much NEXT
can be suppressed.
This chapter proceeds as follows. Section 3.2 describes the system model of
the primary and crosstalk channels. Section 3.3 presents the methods to cancel the
crosstalk signal and a fast computation scheme for practical implementation. The
methods are then extended to estimate and cancel two or more crosstalkers. Simu-
lation results are shown in Section 3.4 to verify the proposed methods. Section 3.5

46 CHAPTER 3. CROSSTALK CANCELLATION
concludes the chapter.
In this chapter, the notations use the following conventions. A small letter, a
bold small letter, and a capital letter represent a scalar, a vector, and a matrix,
respectively. The superscript symbols T and ∗ represent �transpose� and �conjugate
and transpose� operations, respectively.
3.2 System Model
ADSL [53] uses the discrete multiple tone (DMT) modulation scheme [10][11] for data
transmission. DMT is an effective realization of multicarrier transmission [12][13][23],
which partitions the intersymbol interference (ISI) channel into a large number of nar-
rowband subchannels. There is no or little ISI in each subchannel if the bandwidth of
the subchannel is sufficiently narrow. The data is then transmitted in each subchan-
nel almost free of ISI. A subchannel is more often called a �tone� in DMT systems
and this terminology will be used in the rest of this chapter.
The crosstalk signals from HDSL, SDSL, T1, or ISDN have different modulation
schemes. HDSL, SDSL, and ISDN use 2B1Q baseband transmission and T1 uses
alternative mark inversion (AMI) baseband transmission.
Figure 3.1 shows a general model of a primary DMT transmission system with
one crosstalker. The cyclic preÞx is not shown in the Þgure. The primary channel
has a sampling rate of 1/T , but the interference signal has a sampling rate of 1/Tcat the transmitter. As a result, the received crosstalk signal is not stationary. With
this general model, the received time-domain output is
y(t) =Pi
aip(t− iT ) +Pk
bkc(t− kTc + τ) + n(t) ∗ hlp(t)| {z }�n(t)
(3.1)
where ai and bk are the primary transmitted signal and the transmitted crosstalk
signal, respectively. τ (0 < τ < Tc) is a fractional timing difference between the
transmitted primary signal and the crosstalk signal. p(t) and c(t) are the aggregated

3.2. SYSTEM MODEL 47
+
n
1/T
ai Tx Filterg(t)
Channelh(t)
Rcvr Filterhlp(t)
IFFTQ*
αααα
FFT --- Q
1/Tyi
z1/Tc
bk Tx Filtergc(t)
xTalkhc(t)
Figure 3.1: The primary and crosstalk channel model.
channel and crosstalk responses, respectively. Mathematically (refer to Figure 3.1),
p(t) = g(t) ∗ h(t) ∗ hlp(t) (3.2)
c(t) = gc(t) ∗ hc(t) ∗ hlp(t). (3.3)
Both are causal and have Þnite impulse responses. After sampling, the discrete
output is
ym =Pi
aip ((m− i)T ) +Pk
bkc(mT − kTc + τ) + �nm. (3.4)
In DMT systems, the data is transmitted in a block fashion. Suppose the block
size (FFT size) is M , the above equation in one block can be represented compactly
in a matrix form:
y = Pa+ Cb+ n, (3.5)
where y = [yM−1, yM−2, . . . , y0]T , a = [aM−1, aM−2, . . . , a0]T , b = [bL−1, . . . , b0,. . . , b−µ]T , n = [�nM−1, �nM−2, . . . , �n0]T , P and C are the channel and crosstalk re-
sponses matrices, respectively. The DMT signal has a cyclic preÞx (aM−i = a−i,

48 CHAPTER 3. CROSSTALK CANCELLATION
i = 1, . . . , ν), therefore the channel response matrix P is circulant and has the fol-
lowing form,
P =
p0 · · · pν−1 pν 0 · · · 0
0 p0 · · · pν−1 pν. . . 0
.... . . . . . . . . . . . . . . . . .
0 · · · 0 p0 · · · pν−1 pν
pν 0 · · · 0 p0 · · · pν−1...
. . . . . . . . . . . . . . . . . .
p1 · · · pν 0 · · · 0 p0
where ν +1 is the number of taps of the channel response p(t). The crosstalk matrix
CM×(L+µ) is
C =
c(τ − (L− 1)T c+(M − 1)T ) · · · c(τ + (M − 1)T ) · · · c(µT c+τ + (M − 1)T )c(τ − (L− 1)T c+(M − 2)T ) · · · c(τ + (M − 2)T ) · · · c(µT c+τ + (M − 2)T )
......
......
...
c(τ − (L− 1)T c+T ) · · · c(τ + T ) · · · c(µT c+τ + T )
c(τ − (L− 1)T c) · · · c(τ) · · · c(µT c+τ)
where µ + 1 is the number of taps of the crosstalk response, L is the number of
crosstalk symbols in one DMT block (L = dMT/Tce). Note that there are many zeroentries in the above matrix C. Since the delay τ changes from block to block, the
matrix C varies over different blocks.
With a cyclic preÞx, the circulant matrix P can always be decomposed [54, p.
201-2] as
P = Q∗ΛQ (3.6)
where Q is a fast Fourier transform (FFT) matrix, and Λ is a diagonal matrix whose

3.2. SYSTEM MODEL 49
diagonal elements correspond to the frequency response of the channel. More specif-
ically, the FFT matrix is
Q =1√M
e−j2πM(M−1)(M−1) · · · e−j 2π
M(M−1) 1
e−j2πM(M−2)(M−1) · · · e−j 2π
M(M−2) 1
......
......
e−j2πM(M−1) · · · e−j
2πM 1
1 · · · 1 1
and the diagonal elements of Λ from the top left to the right bottom are
diag(Λ) = Q ·
0...
pν...
p0
.
At the transmitter, the signal α is modulated in the frequency domain and
transformed into the time domain by an inverse FFT for transmission, i.e., a = Q∗α.
At the receiver, the received signal is transformed back to the frequency domain.
Therefore, the whole system model in the frequency domain is
z = Qy = Λα+QCb+ n. (3.7)
where z = [zM−1, zM−2, . . . , z0]T , and the white Gaussian noise n = Qn has the
same variance as n. The traditional system treats the crosstalk signal as Gaussian
interference, which signiÞcantly limits the overall system performance. This chapter
presents new methods to cancel or suppress the crosstalk component QCb in the
received signal. The channel and crosstalk responses p(t) and c(t) are assumed to
be known in the ADSL receiver. The channel response is obtained through training
sequences and the crosstalk response can be acquired by the method in [32].

50 CHAPTER 3. CROSSTALK CANCELLATION
3.3 Crosstalk Cancellation
The principal idea of crosstalk cancellation in this section is Þrst to estimate the
crosstalk signal by observing the output of certain frequency bands and then to re-
construct the crosstalk signal in other bands to cancel, or minimize, the interference.
If the crosstalk signal has an excess bandwidth, like HDSL and SDSL crosstalkers,
the cancellation is possible because the excess bandwidth provides more information
about the crosstalk signal. In this section, the basic idea to cancel the crosstalk signal
is described under the terminology of the above system model. A geometrical inter-
pretation is introduced to explain the cancellation process intuitively and to select
the right frequency bands to observe the crosstalk signal. Then, a fast computational
method is proposed for practical implementation, which avoids the matrix inversion
in the crosstalk signal estimation and cancellation. Finally, the method is extended
to more than one crosstalker.
3.3.1 Crosstalk Signal Estimation and Cancellation
ADSL uses DMT modulation and the received signal is processed in the frequency
domain. In order to detect and cancel the crosstalk signal, all the tones of interest1
are partitioned into two disjoint sets, S1 and S2. In set S1, the DMT system treats
the crosstalk signal as a Gaussian noise, like a traditional system. The primary signal
is detected and subtracted from the received signal. Then the crosstalk signal b is
estimated by observing the residual signal in set S1. With the estimated crosstalk
signal b, the interference in set S2 can be constructed and subtracted from the received
signal. If the interference in set S2 can be completely eliminated, then the primary
DMT system will have a signiÞcantly higher signal to interference and noise ratio
(SINR) and more bits can be transmitted in this set of tones. The channel model
representation in (3.7) is re-grouped according to the partition:
1Only includes those tones where the crosstalk signal exists, not all the tones in the ADSLreceiver.

3.3. CROSSTALK CANCELLATION 51
"z2
z1
#=
"Λ2α2
Λ1α1
#+
"Q2Cb
Q1Cb
#+
"n2
n1
#(3.8)
where every vector or matrix with the subscript belongs to the set with the same
subscript. For example, z1 and z2 are the received data in sets S1 and S2, respectively.
Assume the primary signal in set S1 can be detected reliably and denote z1 = z1 −Λ1α1, then the crosstalk signal can be estimated by a linear minimum mean-squares
error (MMSE) estimator [44, p. 95] as
b = (R−1b + C∗Q∗1R−1n Q1C)
−1C∗Q∗1R−1n z1 (3.9)
where Rb and Rn are the signal and noise covariance matrices respectively. The trans-
mitted crosstalk signal sequence b and the background noise are normally assumed
to be white, and the crosstalk signal can be assumed to have unit variance without
loss of generality. Then the above equation can be further simpliÞed to
b = (σ2nI + C∗Q∗1Q1C)
−1C∗Q∗1z1 (3.10)
where σ2n is the background noise variance. There are several different approaches to
construct the crosstalk signal in set S2. Here are the two simple approaches.
1. Linear MMSE estimation and cancellation. The receiver directly uses the esti-
mated signal from (3.10) to construct the interference signal:
Xc = Q2Cb
= Q2C(σ2nI + C
∗Q∗1Q1C)−1C∗Q∗1z1. (3.11)
and subtracts it from the received signal in set S2. In fact, b can be considered
as a special kind of �soft� decision for interference cancellation. The error

52 CHAPTER 3. CROSSTALK CANCELLATION
covariance matrix of the estimated crosstalk signal from (3.10) is
²b = E(b− b)(b− b)∗
= σ2n(σ2nI + C
∗Q∗1Q1C)−1. (3.12)
Then the error covariance of the constructed interference is
²X = σ2nQ2C(σ
2nI + C
∗Q∗1Q1C)−1C∗Q∗2. (3.13)
2. Decision-aided cancellation. The receiver makes �hard� decision on b to decode
the transmitted crosstalk signal in set S1, and constructs the interference signal
in set S2 based on the decision. The disadvantage is that a decision error would
worsen the impact on the constructed interference. The improvement can be
achieved by making �soft� decisions with extra computational complexity.
The Þrst approach works better if the transmitted crosstalk signal cannot be
reliably decoded. For example, the HDSL crosstalker signal includes the low-frequency
band [0−26 kHz], which is eliminated by the front-end Þlter of the ADSL receiver. Asa result, the transfer function for the crosstalk signal has a null response in this band,
which would produce many incorrect decisions if the crosstalk signal were decoded.
The decision-aided cancellation, however, works better if the interference to noise ratio
in set S1 is relatively high such that most of the decisions are correct. Inherently, this
approach takes advantage of the known discrete constellation of the crosstalk source
signal.
3.3.2 Geometrical Interpretation and Tone Selection
A natural question arises on how to select the best frequency bands to estimate the
crosstalk signal and to mitigate the interference in the other bands. The answers for
the two approaches above will be described separately in the following. The crosstalk
signal uses baseband transmission, therefore the signal at a negative frequency is a
conjugate of the counterpart at the positive frequency. For simplicity, this chapter

3.3. CROSSTALK CANCELLATION 53
f
||c(f)||2Rb(f)
1/Tc-fo 1/Tcfo
A B
C
Figure 3.2: Crosstalk estimation and cancellation.
describes the method in the single-sided positive frequency band.
MMSE estimation and cancellation
The right strategy, which will be justiÞed later, is as follows:
1. calculate SINRs in frequencies fo and 1/Tc−fo, where Tc is the crosstalk signalsampling period;
2. estimate the crosstalk signal in the frequency bin that has a smaller SINR;
3. cancel the interference in the other bin that has the larger SINR.
In Figure 3.2, the solid curve shows the power spectral density (PSD) of the
crosstalk signal, with 100% excess bandwidth. The crosstalk signal is estimated in
the excess band and then used to cancel the interference in the main lobe (0, 1/2Tc).
The dotted curve AC shows the residual crosstalk PSD as a result of the crosstalk

54 CHAPTER 3. CROSSTALK CANCELLATION
subtraction. If the smaller one of the interference to noise ratios in frequencies foand 1/Tc− fo is denoted by gs (the shaded zone in the Þgure), then the SINR gain infrequency fo is approximately equal to gs. Similarly, if the crosstalk signal is estimated
in the main lobe and used to cancel the interference in the excess band, the SINR
gain in frequency 1/Tc − fo is also approximately equal to gs. These statements willbe proved later in this subsection.
In fact, the gain is the same no matter which frequency, either fo or 1/Tc − fo,is used to estimate the crosstalk signal. However, the data rate increase is not the
same because it depends on the original SINR. For example, if the original SINR in
frequency 1/Tc − fo is −9 dB and the gain resulting from crosstalk cancellation is
also 9 dB, then the capacity is increased by about 0.5 bit/s/Hz; if the original SINR
in frequency fo is 10 dB and the gain is the same, then the capacity is increased by
about 1.5 bits/s/Hz. Therefore, the crosstalk signal should be estimated in frequency
1/Tc − fo and cancelled in frequency fo. Otherwise, the data rate improvement issmaller (0.5 b/s/Hz versus 1.5 b/s/Hz). This phenomenon could actually happen in an
ADSL environment. When the line reach is very long, the ADSL signal in the excess
band is weak compared to the NEXT signal, therefore, the crosstalk signal should be
estimated in the excess band and cancelled in the main lobe. Correspondingly, if the
primary signal has a smaller SINR in the main lobe for some reason (e.g., because of
the bridge tap), the crosstalk signal should be Þrst estimated in the main lobe and
cancelled in the excess band.
The following provides mathematically the rationale of the above statements.
The problem is easier to understand in the frequency domain instead of the matrix
representation in (3.11). The short-term Fourier transform (STFT) of the system
model in (3.1) is deÞned as
y(f) =1√MT
MTR0
y(t)e−j2πftdt
≈ p(f)a(f) + c(f)ej2πfτb(f) + n(f) (3.14)
where p(f) and c(f) are the normal frequency responses of p(t) and c(t), respectively.
The noise n(f) is a stochastic process, which is the STFT of �n(t). The variance of

3.3. CROSSTALK CANCELLATION 55
n(f) is equal to its PSD, i.e., E(n(f)n∗(f)) = σ2n. The approximation in (3.14) is
due to the term of the crosstalk signal, because the crosstalk signal does not have
the cyclic preÞx and is not cyclostationary. This approximation is accepted for the
following three reasons. First, the approximation error is small if M is relatively
large and is exact asM →∞. Second, the analysis resulting from this approximationis used only for guidance to select the right frequency bins to observe the crosstalk
signal, not for the real crosstalk estimation. Third, this approximation makes the
analysis much more succinct and provides an intuitive explanation of the estimation
and cancellation process.
The primary and the crosstalk signals are
a(f) =1√MT
Pi
aie−j2πfTi,
b(f) =1√MT
Pk
bke−j2πfTck.
The crosstalk signal has the following property: b(f) = b∗(1/Tc − f), where Tc is thecrosstalk symbol period. Therefore, if the crosstalk component in frequency 1/Tc−fois observed, the interference component in frequency fo can be reconstructed.
In the following analysis, 0 < fo < 1/(2Tc) is assumed without loss of generality.
The crosstalk signal bk is assumed to be white and is uncorrelated with the primary
signal ai. For brevity, symbol fd denotes frequency 1/Tc − fo. The linear MMSEestimation of b(fd), given the observation y(fd), is
�b(fd) =c∗(fd)e−j2πfdτRb||c(fd)||2Rb + σ2n
(y(fd)− p(fd)a(fd)) (3.15)
where Rb = E(bkb∗k)L/(MT ) ≈ εb/Tc, and ||c(fd)||2Rb is the PSD of the transmittedcrosstalk signal at frequency fd. The reconstructed interference in frequency fo is
then
xc(fo) = c(fo)ej2πfoτ�b∗(fd). (3.16)

56 CHAPTER 3. CROSSTALK CANCELLATION
The variance of the cancellation residual error plus the background noise is
σ2t (fo) = σ2n
||c(fo)||2Rb||c(fd)||2Rb + σ2n
+ σ2n. (3.17)
The original error variance without cancellation is
σ2x(fo) = ||c(fo)||2Rb + σ2n. (3.18)
Therefore, the SINR gain is equal to
Gain =σ2x(fo)
σ2t (fo)
= 1 +||c(fo)||2||c(fd)||2R2b
σ2n(||c(fo)||2Rb + ||c(fd)||2Rb + σ2n)(3.19)
= 1 +PSD(fo) · PSD(fd)
σ2n (PSD(fo) + PSD(fd) + σ2n)
(3.20)
where PSD(fo) is the interference PSD at frequency fo.
Proposition 1 Suppose the PSDs of the primary signal and the background noise
are Þxed. Given the dual frequencies fo and fd, the SINR gain by the MMSE esti-
mation and cancellation is the same no matter which frequency is used for crosstalk
estimation. However, with respect to the data rate improvement, the crosstalk should
be estimated in the frequency with a lower SINR and cancelled in its dual frequency.
Proof. The SINR gain in (3.20) is derived by estimating the crosstalk signal in
frequency fo and cancelling it in frequency fd. Since the SINR gain is symmetric with
respect to PSD(fo) and PSD(fd) as seen in (3.20), the same improvement in terms
of SINR is obtained if the crosstalk component in frequency fo is estimated Þrst and
the interference in frequency fd is cancelled next.

3.3. CROSSTALK CANCELLATION 57
The data rate increase ∆R is
∆R = W log2
Ã1 + SINR·Gain
Γ
1 + SINRΓ
!
= W log2
Ã1 +
(Gain− 1)Γ
SINR+ 1
!(3.21)
where Γ is the gap [55] from the capacity and W is the subchannel bandwidth. The
data rate improvement ∆R is a monotonic increasing function of SINR. The higher
the original SINR is, the larger the data rate increase is. Therefore, the crosstalk
should be estimated in the frequency with a lower SINR and cancelled in the frequency
with a higher SINR. This is especially important when SINR is small in one frequency
and is large in its dual frequency.
Remark 1 There is one exception. In practical systems, there is a limit on the
maximum number of bits that can be transmitted in each bin. This is commonly
known as �bit cap�. If the higher SINR is originally so large that further gain in the
SINR cannot increase the date rate because of the bit cap, then the crosstalk signal
should be estimated in the bin with higher SINR and cancelled at it dual frequency.
The following example illustrates two important special cases for the SINR gain.
Example 4 (a) The interference levels are the same in the dual frequencies and
more than 10dB larger than noise, then the SINR gain is approximately
Gain ≈ PSD(fo)
2σ2n,
which is equal to the interference to noise ratio minus 3 dB.
(b) The interference levels have large disparity, for example, ||c(fo)||2 > 10||c(fd)||2,then the SINR gain is approximately
Gain ≈ PSD(fd)
σ2n
which is essentially equal to the interference to noise ratio of the smaller crosstalker.

58 CHAPTER 3. CROSSTALK CANCELLATION
In the DSL systems, the crosstalk signals from ISDN, HDSL, or SDSL have a
large percentage of excess bandwidth. Therefore, the crosstalk signal can be estimated
Þrst in the excess band and then be used to cancel the interference in the main lobe.
The crosstalk in the excess band is generally smaller than in the main lobe, which
Þts case (b) in the above example. The SINR gain in the main lobe is equal to the
interference to noise ratio in the excess band. If there is no excess bandwidth, then
there is no SINR gain at all!
Decision-based Approach
For a given pair of the dual frequencies (fo and 1/Tc− fo), the best SINR gain by theMMSE approach above is equal to the smaller one of the interference to noise ratios
in these two frequencies. The decision-based approach could do better if the crosstalk
signal can be reliably detected. For example, if the crosstalk can be detected reliably
in the excess band, then all the interference in the main lobe can be eliminated,
as opposed to the residual interference (dotted line) shown in Figure 3.2. In this
approach, the best choices of the frequency bins for set S1 are those with large enough
interference to noise ratio for the reliable detection of the crosstalk signal. If there
are no such choices, the MMSE approach should be used instead.
3.3.3 Fast Computation
The crosstalk channel response is changing block over block because the crosstalk
signal and the primary signal have different sampling rates. Direct computation of
the linear MMSE estimation in (3.10) requires matrix inversion in every block. A fast
computation method is developed to avoid the large matrix inversion, with a slightly
degraded performance. This method is based on the well-known fact that the delay
in the time domain is equivalent to the phase shift in the frequency domain.
Denote C0 as the crosstalk function matrix with zero delay (τ = 0), then
Q1C ≈ Dτ ,1Q1C0 (3.22)

3.3. CROSSTALK CANCELLATION 59
where Dτ ,1 represents the phase shift components of the channel response,
Dτ ,1 =
ej2π
k1N
τT 0 · · · 0
0 ej2πk2N
τT
. . ....
.... . . . . . 0
0 · · · 0 ej2πkmN
τT
.
where k1, . . . , km are the tone indices in set S1. The approximation in (3.22) is because
of the edge effect of the matrix. Asymptotically as M → ∞, the approximationbecomes an exact equation. The fractional delay τ is easy to infer block over block
because the sampling rates of the primary and crosstalk signals are both known.
With this approximation, the estimated signal can be simpliÞed as
b ≈ ΨD∗τ ,1z1 (3.23)
where Ψ is a constant matrix
Ψ = (C∗0Q∗1Q1C0 + σ
2nI)
−1C∗0Q∗1 (3.24)
which can be pre-computed and stored. This constant matrix avoids matrix inversion
and large matrix multiplications in each transmission block. The multiplicationD∗τ ,1z1
implies that the receiver adjusts the timing offset of the signal z1. Multiplying by the
constant matrix Ψ is roughly the same as passing the adjusted signal through a linear
MMSE Þlter. The reconstructed signal in (3.11) can also be simpliÞed as
Xc ≈ Dτ ,2ΦD∗τ ,1z1 (3.25)
where Φ is another constant matrix
Φ = Q2C0(C∗0Q
∗1Q1C0 + σ
2nI)
−1C∗0Q∗1 (3.26)
andDτ ,2 is similar toDτ ,1 except that it uses the tone indices of set S2 in the diagonal,
e.g., ej2πlN
τT , l ∈ S2. Similarly, the computational complexity is reduced dramatically

60 CHAPTER 3. CROSSTALK CANCELLATION
because the constant matrix Φ can be pre-computed and stored.
3.3.4 Extension to Multiple Crosstalkers
The idea of estimating the crosstalk signal in one set of frequency bands and cancelling
it in another set of frequency bands can be extended to more than one crosstalker.
The system model remains the same as (3.8), but the crosstalk component QCb is
modiÞed slightly to include more crosstalkers, i.e.,
C = [C1, C2, . . . , Ck]
b = [b1,b2, . . . ,bk]T
where k is the number of the crosstalkers. The amount of performance improve-
ment depends on the crosstalkers� characteristics and the choice of the cancellation
approaches. The following example illustrates one particular approach of successive
cancellation of the crosstalk signals by estimating the crosstalk signals in the excess
band.
Example 5 The crosstalkers HDSL and 2080 kbps SDSL have single-sided bandwidth
of 192kHz and 520kHz. Both of them have about 100% excess bandwidth. Therefore,
SDSL can be estimated Þrst in frequency band [520 − 1040kHz] where the HDSLcrosstalker signal does not exist. Then the SDSL crosstalker can be cancelled in the
main lobe [138−520kHz]. After that, the same process is used to estimate and cancelthe smaller-bandwidth HDSL crosstalk.
3.4 Simulation Results
The ADSL downstream transmission is more vulnerable to NEXT than the upstream,
because the primary signal attenuates very rapidly while NEXT increases as frequency
increases. The simulations are thus concentrated on the downstream receiver on the
customer side. In current deployments, strong NEXT mainly comes from ISDN,
HDSL, SDSL, T1 or their repeaters. For a given line, there is very likely only one

3.4. SIMULATION RESULTS 61
DSL ADSL HDSLLine code DMT 2B1Q
Sampling ratefo (ks/ sec)
2208 392
Power (dBm) 19.0 13.6
Duplexingup : 26− 138kHz
down : 138− 1104kHz Dual
Table 3.1: Main ADSL and HDSL Characteristics.
dominant crosstalk because of the following two reasons. First, the crosstalk line
should reside physically close to the victim line. Second, most services in the same
bundle are also ADSL. With the above two justiÞcations, the simulations assume
only one NEXT for a given line. It is thus also acknowledged that this technique may
not always provide large gain.
The main characteristics of ADSL and HDSL are summarized in Table 3.1. For
more information, refer to [2][3] and the references therein. SDSL [29] has the same
characteristic as HDSL except that it offers variable symmetric data rate. The single-
sided PSD of SDSL and HDSL is typically
PSD(f) = K · 2
fsymsin c2
µπf
fsym
¶1
1 +³
f240392
fsym
´8 (3.27)
Watts/Hz, where fsym is the symbol rate andK = 592.72
135. The PSD includes a 4th order
lowpass butterworth Þlter whose 3 dB attenuation occurs at frequency 240fsym/392.
For HDSL, fsym = 392 kHz and f3dB = 240 kHz (see 2). The NEXT coupling
functions are taken from real measured data. Figure 3.3 shows several dominant
NEXT coupling magnitude functions for a given line. The thickest line in the Þgure
is used here for simulation. The crosstalk transfer function is then a cascade response
of the rectangular pulse, the butterworth Þlter, the NEXT coupling function, and the
receiver lowpass Þlter. A linear phase is assumed in the NEXT coupling function.
The system parameters used to calculate the ADSL downstream data rate are
2In the original ADSL test procedures as speciÞed in ITU-T G.996.1 Recommendations, f3dB =192kHz. This number has been changed in [29] to 240kHz for greater accuracy.

62 CHAPTER 3. CROSSTALK CANCELLATION
0 0.5 1 1.5 2-110
-100
-90
-80
-70
-60
-50Measured NEXT Attenuation
Frequency (MHz)
Atte
nuat
ion
in d
B
Figure 3.3: Measured NEXT coupling for a given line.

3.4. SIMULATION RESULTS 63
ADSL line type: 26 GaugeAWGN (single-sided): −140 dBm/HzSystem margin: 6 dBCoding gain: 3 dBSNR-gap: Γ = 9.5 dB# of self-FEXT: 24
Table 3.2: ADSL system parameters for data rate calculation.
summarized in Table 3.2. The upstream and downstream bands for ADSL are shown
in Table 3.1. The total noise for the data rate computation is the sum of background
noise, 24 FEXT from ADSL services by the standard model [53], and one dominant
NEXT from HDSL or SDSL.
3.4.1 HDSL NEXT Cancellation
HDSL has a relatively small bandwidth with respect to the ADSL signal. The
crosstalk is estimated and cancelled by the approaches proposed in Section 3.3.1.
Figure 3.4 shows three PSDs which correspond to the original NEXT, the residual
NEXT using the decision-aided cancellation approach, and the residual NEXT using
the MMSE estimation and cancellation approach. The crosstalk signal is observed in
the HDSL excess band [198 − 250 kHz] and cancelled in the main band [142 − 194kHz]. In the observing band, the interference is treated as a Gaussian noise for the
detection of the primary signal and no improvement has been achieved. However,
in the main lobe [142 − 194 kHz], the improvement by the MMSE estimation andcancellation is very large as shown in Figure 3.4, which is about +30 dB. This result
Þts very well with the analysis and geometric interpretation of the crosstalk cancel-
lation in Section 3.3.2. As expected in Example 4, the SINR gain in frequency 194
kHz is approximately equal to the interference to noise ratio in the dual frequency
198 kHz minus 3 dB. If self-NEXT from other ADSL services in the upstream band
[26−138 kHz] is small (this Þgure assumes no self-NEXT), the HDSL crosstalk signalcan also be estimated in the ADSL upstream band and then cancelled in the dual
HDSL excess band [254 − 366 kHz]. The interference in the excess band [254 − 366

64 CHAPTER 3. CROSSTALK CANCELLATION
50 100 150 200 250 300 350-145
-140
-135
-130
-125
-120
-115
-110
-105
-100
Frequency (kHz)
dBm
/Hz
HDSL NEXT Cancellation
AWGN
Original NEXTDecision-aidedMMSE
Figure 3.4: HDSL NEXT estimation and cancellation.
kHz] can be almost eliminated because the crosstalk signal in band [26 − 138 kHz]has a much larger interference to noise ratio.
Interestingly, the MMSE estimation and cancellation technique works much bet-
ter than the decision-aided technique for the HDSL crosstalker. The direct cause
is that the HDSL signal are not detected reliably enough, and the wrong decisions
double the negative impact on the cancellation residual error. The decoding error is
mainly because the HDSL crosstalk signal in the voice band [0-26kHz] is lost after it
passes the ADSL receiver Þlter. The problem is even worse when the HDSL signal
can not be estimated in the ADSL upstream band [26− 138 kHz] if self-NEXT fromADSL are stronger than the HDSL signal.
Figure 3.5 shows the ADSL downstream data rate improvement as a result of the
MMSE crosstalk estimation and cancellation. Given a line length of 4500 m, the data
rate increases from 0.8 Mbps to 1.7 Mbps. It is also interesting to note that, given

3.4. SIMULATION RESULTS 65
3000 3500 4000 4500 5000 5500 60000
1
2
3
4
5
6
Loop Length (m)
Mbp
s
ADSL Downstream Data Rate
Without cancellationWith cancellation
Figure 3.5: Downstream data rates with/without NEXT cancellation.

66 CHAPTER 3. CROSSTALK CANCELLATION
200 400 600 800 1000-145
-140
-135
-130
-125
-120
-115
-110
-105
-100
Frequency (kHz)
dBm
/Hz
SDSL NEXT CancellationOriginal NEXTDecision-aidedMMSE
Figure 3.6: SDSL NEXT estimation and cancellation.
the data rate of 0.8 Mbps, the line reach increases from 4500 m to 5300 m, which is
about 39% more coverage area for the service providers.
3.4.2 SDSL NEXT Cancellation
SDSL offers variable symmetric data rates by using different bandwidth. In the
simulation, the symbol rate is chosen as fsym = 1040 kHz. Three PSDs of the SDSL
NEXT are shown in Figure 3.6. They correspond to the original NEXT, the residual
NEXT using the decision-aided cancellation approach, and the residual NEXT using
the MMSE cancellation approach, respectively. The crosstalk signal is estimated in

3.4. SIMULATION RESULTS 67
the SDSL excess band [522−902 kHz] and cancelled in the dual main lobe [138−518kHz]. The improvement is very large in those frequency band around fsym/2 where
the excess band has very high interference to noise ratio. As the frequency increases
towards fsym, the crosstalk signal becomes small, correspondingly the improvement of
the cancellation in the dual frequency band becomes small. As shown in Figure 3.6,
the improvement of SINR is smaller in the bands closer to the minimum downstream
frequency (138 kHz). If the self-NEXT from other ADSL services are small, the
crosstalk signal can be estimated in the ADSL upstream band [26 − 138 kHz] andcancelled in the dual excess band [904− 1014 kHz].
The MMSE estimation and cancellation approach performs better than the de-
cision aided approach. However, the difference from these two approaches is smaller
than that of the HDSL service. The reason is that the SDSL service has a much larger
bandwidth than the HDSL service and the loss of the signal in the low-frequency band
[0− 26 kHz] has a relatively smaller effect on the decoding error.The ADSL data rate improvement is shown in Figure 3.7. The improvement is
most signiÞcant in the loops around 2500 m −4500 m. The improvement is smallerin the shorter loop (< 2500 m) because the self-FEXT are larger. Given a line length
of 3500 m, the data rate increases from 0.9 Mbps to 2.7 Mbps. Similarly, for a given
data rate of 0.9 Mbps, the loop length increases from 3500 m to 4600 m, which is
about 73% more area coverage for a service provider. The SDSL NEXT is very severe
crosstalk to the ADSL downstream transmission because it has a large bandwidth.
The cancellation method proposed in this chapter can greatly improve the system
performance if there is one (dominant) NEXT.
3.4.3 Fast Computation
One important aspect of the proposed techniques is that there exists a fast computa-
tional scheme, which may be used for practical implementation. This fast algorithm
degrades the system performance because of the edge effect in the crosstalk function
matrix as described in Section 3.3.3. Figures 3.8 and 3.9 show the NEXT cancellation
results for HDSL and SDSL, respectively. The three PSDs correspond to the original

68 CHAPTER 3. CROSSTALK CANCELLATION
2000 2500 3000 3500 4000 4500 5000 55000
1
2
3
4
5
6
7
8
Loop Length (m)
Mbp
s
ADSL Downstream Data Rate
Without SDSL cancellationWith SDSL cancellation
Figure 3.7: Downstream data rates with/without SDSL NEXT cancellation.

3.5. CONCLUSIONS 69
50 100 150 200 250 300 350-145
-140
-135
-130
-125
-120
-115
-110
-105
-100
Frequency (kHz)
dBm
/Hz
HDSL NEXT CancellationOriginal NEXTMMSEMMSE_fastComp
Figure 3.8: HDSL NEXT cancellation using the fast algorithm.
NEXT, the residual NEXT by the fast algorithm, and the residual NEXT by the
accurate MMSE estimation and cancellation in Section 3.3.1. The simulation results
show that the SINR loss due to the fast algorithm is relatively small.
3.5 Conclusions
The crosstalk from other types of services, such as HDSL, SDSL, and T1, limits the
data rate or the line reach of an ADSL service. This chapter presented two new
methods to mitigate such NEXT. Both methods are based on the idea of estimating
the crosstalk signal in some frequency bands and canceling it in other frequency bands.
The decision-aided method decodes the crosstalk signal based on the observation

70 CHAPTER 3. CROSSTALK CANCELLATION
200 400 600 800 1000-145
-140
-135
-130
-125
-120
-115
-110
-105
-100
Frequency (kHz)
dBm
/Hz
SDSL NEXT CancellationOriginal NEXTMMSEMMSE_fastComp
Figure 3.9: SDSL NEXT cancellation using the fast algorithm.

3.5. CONCLUSIONS 71
in some frequency bands. The crosstalk signal is then reconstructed and cancelled
in other bands. The method has the problem of error propagation. The MMSE
estimation and cancellation method does not decode the crosstalk signal, but uses the
MMSE estimation result directly to construct the interference and cancel it in other
frequency bands. The latter approach is particularly better to suppress one HDSL or
SDSL NEXT because the decision-aided approach can not decode the crosstalk signal
reliably due to high attenuation and the signal loss in the low-frequency band [0− 26kHz]. This conclusion is veriÞed by the simulation results.
This chapter also presents an intuitive explanation of crosstalk cancellation,
which provides the guidance to select the right frequency bands to estimate the
crosstalk signal. One interesting result of the MMSE estimation and cancellation
is that the gain from interference suppression is the same no matter if the crosstalk
signal is estimated in the main lobe or in the excess band. In general, the main lobe
has larger interference than the excess band. Therefore, if the crosstalk signal is esti-
mated in the main lobe, the interference caused by the excess band can be eliminated.
Conversely, if the crosstalk signal is estimated in the excess band, the SINR gain in
the main lobe is equal to the interference to noise ratio in the excess band. The larger
the interference in the excess band, the better the suppression of the interference in
the main lobe.
Moreover, a fast computational algorithm was developed for practical implemen-
tation with slightly degraded performance. This method avoids matrix inversion and
large matrix multiplication in every transmission block. In contrast, the traditional
MMSE estimation requires high computational complexity since the crosstalk signal
is non-stationary and large matrix inversion is needed in every transmission block.
In conclusion, the MMSE estimation and cancellation scheme is very effective in
cancelling the crosstalk if the crosstalk has a large percentage of excess bandwidth.
In current DSL systems, NEXT into an ADSL receiver has a large excess bandwidth,
therefore this method is very effective to cancel one dominant NEXT.

Chapter 4
Multiuser Water-Þlling Algorithms
4.1 Introduction
In a multiaccess channel (MAC), several transmitters (users) send information to a
common receiver. The capacity region of a memoryless Gaussian MAC is described in
[56]. The capacity region of a Gaussian MAC with intersymbol interference (ISI) has
been studied in [57] [58]. To obtain the optimal transmit power spectral density (PSD)
explicitly for each user, Cheng and Verdu [59] studied a two-user scalar GaussianMAC
that is linear and time invariant. The Gaussian MAC is shown in Figure 4.1, where
both the inputs and the outputs are scalar and the channel seen by each user is
independent and time invariant. In [59], Cheng and Verdu extended the well-known
single-user water-Þlling method [60] to the two-user MAC and derived the optimal
transmit PSDs for each user. In [61], Tse proposed a generalized formulation of the
capacity region of a MAC with an arbitrary number of the users.
Although the optimal transmit PSDs can be expressed mathematically in [59]
[61], no prior work has been reported to compute them efficiently and to obtain
the capacity region of a two-user Gaussian MAC with ISI. Previously, Diggavi [62]
proposed an algorithm to calculate the optimal PSDs for a situation where two users
have the same priorities. This special case corresponds to one point on the boundary of
the capacity region. Yu [63] investigated the two-user rate region under the constraint
of frequency division multiaccess (FDMA) between two users.
72

4.1. INTRODUCTION 73
G1(ω)
G2(ω)
+ +
nx1
x2
Figure 4.1: Two-user Gaussian multiaccess channel.
This chapter describes three new water-Þlling algorithms. The Þrst algorithm
is developed for a two-user channel where both users have the same priority and is
more computationally efficient than Diggavi�s [62]. The second algorithm is for a
Gaussian MAC with K > 2 users where all users have the same priorities. The third
algorithm is developed for a general two-user scenario where two users have different
priorities. By changing the priority of different users, we can obtain the boundary of
the capacity region for the two-user channel. These three algorithms were previously
presented at two conferences [34][35].
Using the gap approximation [55], we can directly apply our algorithms to Dis-
crete Multitone (DMT) modulated systems [13] [10] [11] of Gaussian MACs to obtain
the optimal transmit PSD for each user if all users have the same priorities. In DMT
systems, these types of algorithms are more commonly known as �loading algorithms�
[64].
The chapter is organized as follows. Section 4.2 reviews the previous work by
Cheng and Verdu on the mathematical expressions of the optimal PSDs in a frame-
work that is convenient for later algorithm development. Section 4.3 then describes
new algorithms to Þnd the optimal transmit PSDs for a Gaussian MAC. Simulation
results are described in Section 4.4 to demonstrate the efficiency of our algorithms.
Section 4.5 summarizes the chapter.

74 CHAPTER 4. MULTIUSER WATER-FILLING ALGORITHMS
ω
cP
g-1(ω)
Figure 4.2: Water-Þlling diagram for a single user channel.
4.2 Prerequisite
This section brießy reviews the previous work [59] on the optimal transmit PSDs for a
Gaussian multiaccess channel. For a single user, the optimal PSD S(ω) is the unique
solution to the following equations:
S(ω) = [c− g−1(ω)]+, (4.1)
P =1
π
Z π
0
S(ω)dω, (4.2)
where P is the total power constraint and g(ω) = |H(ω)|2 /N(ω) is the magnitudesquare of the channel transfer function over the noise PSD. The �+� sign in (4.1)
indicates that S(ω) ≥ 0. The geometrical interpretation of the above equations (4.1)(4.2) is shown in Figure 4.2 and known as �water-Þlling� scheme [60], where the
bottom of the �container� is g−1(ω) and the �water� level is Þlled to c. The total
amount of �water� is equal to the power P.
For a two-user channel, the capacity region can be described as
C = {(R1, R2) ∈ IR2+ : αR1 + (1− α)R2 ≤ C(α),∀α ∈ [0, 1]} (4.3)
where R1 and R2 are data rates of user 1 and 2, respectively, subject to individual
power constraints. C(α) is the maximum value for a given α. The boundary of the

4.2. PREREQUISITE 75
capacity region consists of those points that satisfy the equality in (4.3). The variable
α can be interpreted as a priority factor for the two users. If α > 0.5, user 1 has
higher priority and vice versa.
The optimal PSDs for the two users are needed in order to achieve the boundary
of the capacity region. For the special case of equal priorities where α = 0.5, it has
been shown [59] that the optimal PSDs for the two users are:
Sk(ω) =�Sk(ω)
bk(4.4)
�Sk(ω) =
([1− bkg−1k (ω)]+, ω ∈ Ik0, otherwise
(4.5)
where k = 1, 2 and the frequency bands Ik are disjoint and assigned with the following
requirements:
I1 : b1g−11 (ω) ≤ b2g−12 (ω)
I2 : b2g−12 (ω) ≤ b1g−11 (ω) (4.6)
The scaling factors bk are chosen to satisfy the following constraint:
1
π
Z π
0
�Sk(ω)dω = bkPk, k = 1, 2 (4.7)
where Pk is the power constraint for each individual user. The optimal PSDs are
achieved by frequency-division multiple access (FDMA) according to (4.5). Figure
4.3 shows the water-Þlling scheme for the two-user MAC with equal priorities. The
graphical interpretation of the above equations is as follows. Both users� channel
characteristics g−1k (ω) are scaled by a pair of scaling factors bk, k = 1, 2, respectively.
The scaled channel characteristics are equivalent to the original channels but with
different power constraints bkPk. This equivalent channel idea allows the two separate
water-Þlling diagrams to be combined into a single water-Þlling diagram with the same
water level using proper scaling factors bk. By arbitrarily Þxing the water-Þlling level
for both users to 1, the scaling factors b1, b2 are adjusted until the total amount

76 CHAPTER 4. MULTIUSER WATER-FILLING ALGORITHMS
1
b1g1-1(ω)
b2g2-1(ω)
b2P2b1P1
Figure 4.3: Water-Þlling diagram for two users with equal priorities.
of water in the region where b1g−11 (ω) < b2g−12 (ω) is equal to b1P1, and likewise for
user 2. Effectively, the equivalent channel idea has transformed the 2-user system
into a single-user system whose inverted channel-to-noise curve is the minimum of
the two curves, b1g−11 (ω) and b2g−12 (ω), onto which a total amount of water equal
to b1P1 + b2P2 is poured. Each user then occupies the frequency band(s) where its
channel characteristic bkg−1k (ω) is smaller. This water-Þlling method can be extended
similarly to a system of more than two users with equal priorities, which will be
described more in Subsection 4.3.2.
When two users are assigned different priorities (α 6= 0.5), the optimal PSD [59]is
Sk(ω) =�Sk(ω)
bk, k = 1, 2 (4.8)
where bk > 0 and if α ∈ (0.5, 1],
�S1(ω) =
[α− b1g−11 (ω)]+, if ω ∈ I1[α− b1g−11 (ω)]+ − �S2(ω), if ω ∈ I20, if ω ∈ I3
(4.9)
�S2(ω) =
0, if ω ∈ I1[1− α− b2g−12 (ω) · 2α−1
b1g−11 (ω)−b2g
−12 (ω)
]+, if ω ∈ I2[1− α− b2g−12 (ω)]+, if ω ∈ I3
. (4.10)

4.2. PREREQUISITE 77
α
b1g1-1(ω)
b2g2-1(ω) + 2α - 1
b1P1
I1 I2 I3
b2P2
A
B
Figure 4.4: Water-Þlling diagram for two users with different priorities (α > 0.5).
where the frequency bands I1, I2, I3 are disjoint and are characterized respectively by
I1 : b1g−11 (ω) ≤ b2g−12 (ω) (4.11)
I2 : b2g−12 (ω) < b1g
−11 (ω) ≤ b2g−12 (ω) + 2α− 1 (4.12)
I3 : b1g−11 (ω) > b2g
−12 (ω) + 2α− 1 (4.13)
and �Sk(ω) should satisfy the individual power constraint:
1
π
Z π
0
�Sk(ω)dω = bkPk, k = 1, 2 (4.14)
For brevity, the optimal PSD formulas for α ∈ [0, 0.5) are not given here but can bederived by exchanging the roles of the two users.
Figure 4.4 shows the water-Þlling scheme for the two-user MAC scenario with
unequal priorities (α > 0.5). The water level is Þxed at α. The bottom of the container
for user 1 is still b1g−11 (ω) and the bottom of the container for user 2 is shaped by
b2g−12 (ω) + 2α− 1. Since user 1 has higher priority, it occupies some frequency band
(I2) that would have been assigned to user 2 should the two users have equal priorities.
There are three frequency bands (I1, I2, I3) in the Þgure. Only user 1 occupies the
frequency band I1 that is to the left side of point A, as b1g−11 (ω) ≤ b2g−12 (ω). Two
users share the frequency band I2 that is between points A and B. Finally, only user
2 occupies the frequency band I3 that is to the right side of point B. Note that an

78 CHAPTER 4. MULTIUSER WATER-FILLING ALGORITHMS
FDMA scheme cannot achieve the optimal PSDs in the Gaussian MAC with unequal
priorities. In region I2, the sum of the PSDs for both users is equal to [α−b1g−11 (ω)]+,which is the height from the bottom (curve AB) to the water level. The bottom of
the container (the dashed line in Figure 4.4) of user 2 in region I2 is reshaped as
B2(ω) = b2g−12 (ω)
2α− 1b1g
−11 (ω)− b2g−12 (ω)
+ 2α− 1≥ b2g
−12 (ω) + 2α− 1
≥ b1g−11 (ω). (4.15)
The inequalities follow from the deÞnitions of I2 in (4.12). Within the frequency band
I2, the optimal PSD for user 2 is �S2(ω) = [α−B2(ω)]+, and the optimal PSD for user1 is �S1(ω) = [α− b1g−11 (ω)]+ − �S2(ω). Although the optimal PSDs can be expressed
mathematically, it is still difficult to Þnd the right scaling factors b1, b2 to compute
the PSDs numerically.
4.3 Multiuser Water-Þlling Algorithms
This section describes new and efficient algorithms to Þnd the scaling factors bk for
computing the optimal transmit PSDs for different scenarios. We assume the channel
characteristics g−1k (ω) are sampled and thus the digital channel characteristics g−1k (i),
i = 1, . . . , N, are used in the rest of the chapter. In a DMT system, N corresponds
to the number of subcarriers. The algorithm for two users with equal priorities is an
exact solution and has a computational complexity of O(N log2N), which is lower
than Diggavi�s [62] O(N2) complexity. For K > 2 users with equal priorities, the
known optimal algorithm has a complexity of O(N (K−1)K/2) [62], which is impractical
to compute when K is large. This motivates derivation of a new heuristic algorithm,
which has a computational complexity of approximately O(K2N log2N) and still
achieves data rates of more than 98% of the capacity in all the channels simulated.
Finally an exact algorithm is developed for the two-user channel with unequal priori-
ties. This algorithm has an approximate complexity of O(N log2N) but with a larger
constant than that of the equal-priority case. Using this algorithm, the boundary of

4.3. MULTIUSER WATER-FILLING ALGORITHMS 79
the Gaussian MAC capacity region can be obtained by tracing the priority factor α
from 0 to 1.
4.3.1 Equal Priority : max(R1 +R2)
In Section 4.2, the optimal PSDs for two users with equal priorities can be achieved
through FDMA. Correspondingly, the discrete optimal PSDs of the two users are
�S1(i) =
([1− b1
g1(i)]+, i ∈ I1
0, i ∈ I2(4.16)
�S2(i) =
(0, i ∈ I1[1− b2
g2(i)]+, i ∈ I2
(4.17)
where I1 and I2 are disjoint frequency bands with the following requirements:
I1 :b1
g1(i)≤ b2
g2(i), I2 :
b2
g2(i)≤ b1
g1(i),
I1 ∪ I2 = {1, 2, . . . , N}. (4.18)
The scaling factors bk(k = 1, 2) should also satisfy the power constraints:
Xi∈I1
[1− b1g1(i)
]+ − b1P1 = 0 (4.19)
Xi∈I2
[1− b2g2(i)
]+ − b2P2 = 0 (4.20)
Remark 2 The inverse channel characteristics g−1k are scaled by bk and the water
level is Þxed at 1. Each user can occupy only the frequency bands where its scaled
inverse channel characteristics bkg−1k (i) are the smallest (Figure 4.3). The optimal
scaling factors (b1, b2) need to satisfy the power constraints in (4.19) and (4.20).

80 CHAPTER 4. MULTIUSER WATER-FILLING ALGORITHMS
Without loss of generality, we assume the ratio of the channel characteristics
r(i) = g1(i)/g2(i) has been sorted in a descending order, i.e.,
g1(1)
g2(1)≥ g1(2)
g2(2)≥ · · · ≥ g1(N)
g2(N). (4.21)
In the FDMA Gaussian MAC scenario, two users are competing for the frequency
bands. If subcarrier k is assigned to user 1 (b1g−11 (k) ≤ b2g−12 (k)), then the subcarrierswith indices less than k must also be assigned to user 1 because it has a relatively
better channel characteristic (after scaling) than user 2 (b1g−11 (i) ≤ b2g−12 (i), i < k).Therefore the frequency bands of the optimum solution must have the following forms:
I1(k) ∈ {1, 2, . . . , k}I2(k) ∈ {k + 1, . . . , N}. (4.22)
where 1 ≤ k ≤ N . The objective now is to Þnd the optimal partition kopt, which
satisÞes (4.18), (4.19) and (4.20).
Theorem 2 : If the scaling factors b1 and b2 satisfy (4.19) (4.20) with the frequency
bands shown in (4.22), then the ratio of the scaling factors b1(k)/b2(k) is an increasing
function of the variable k.
Proof. (1) b1(k) is an increasing function of the variable k. To see this, we rewrite
(4.19) as Xi∈I1(k)
[1
b1(k)− 1
g1(i)]+ = P1. (4.23)
When k increases, I1 includes more subcarriers. Therefore the water level 1/b1(k)
should go down since the bottom of the �container� 1/g1(i) is Þxed. Mathematically,
a smaller 1/b1(k) is needed to satisfy (4.23). In other words, b1(k) ≤ b1(k + 1).(2) b2(k) is a decreasing function of the variable k. When k increases, I2 includes
less subcarriers and the water level 1/b2(k) should go up. Therefore, a larger 1/b2(k)
is needed to satisfy (4.20), which implies b2(k) ≥ b2(k + 1).Thus, b1(k)/b2(k) increases with the variable k.

4.3. MULTIUSER WATER-FILLING ALGORITHMS 81
1 N
g1(i)/g2(i)
A
b1(i)/b2(i)
i
Figure 4.5: Two curves representing functions g1(i)/g2(i) and b1(i)/b2(i), respectively.
Given a frequency partition as shown in (4.22), the scaling factors b1(k), b2(k)
can always be calculated by the power constraints in (4.19) and (4.20). However,
there is only one pair of scaling factors that correspond to the optimal solution, i.e.,
satisfy the requirements in (4.18). Figure 4.5 shows the functions of r(i) = g1(i)/g2(i)
and b1(i)/b2(i), where r(i) is a decreasing function while b1(i)/b2(i) is an increasing
function. The intersection point A corresponds to the optimal partition and can be
found using the binary search technique because both functions are monotonic. The
algorithm is as follows:
Load2User(g1, g2, P1, P2, I)
1. left = 1,right = N
2. while (right − left> 0)
(a) k = b(left + right)/2c(b) Calculate the scaling factors b1(k) and b2(k) from (4.19)(4.20)
(c) if (r(k) ≥ b1(k)/b2(k) ≥ r(k + 1)) break(d) else if (b1(k)/b2(k) > r(k)) right = k
(e) else if (b1(k)/b2(k) < r(k + 1)) left = k + 1
3. kopt = k, b1 = b1(kopt), b2 = b2(kopt)

82 CHAPTER 4. MULTIUSER WATER-FILLING ALGORITHMS
4. I1 = {1, 2, . . . , kopt}, I2 = {kopt + 1, . . . , N}
5. Calculate PSDs from (4.16) and (4.17)
6. return b1, b2, I1, I2
This algorithm searches at most log2N partitions due to the binary search. For
each partition, it takes O(N) to calculate the scaling factors b1 and b2. Therefore, the
total complexity of this algorithm is O(N log2N). In contrast, Diggavi�s approach
must search all N points and each point takes O(N), resulting in a complexity of
O(N2).
4.3.2 K Users : max(R1 +R2 + · · ·+RK)
We Þrst study a three-user channel to gain some insight into this problem and then
extend our algorithm to K users. The discrete optimal PSDs for three users are
�Sk(i) =
([1− bk
gk(i)]+, i ∈ Ik
0, i /∈ Ik(4.24)
where k = 1, 2, 3, and Ik are disjoint frequency bands which satisfy:
I1 :b1g1(i)
≤ minµb2g2(i)
,b3g3(i)
¶,
I2 :b2g2(i)
≤ minµb1g1(i)
,b3g3(i)
¶,
I3 :b3g3(i)
≤ minµb1g1(i)
,b2g2(i)
¶,
I1 ∪ I2 ∪ I3 = {1, 2, . . . , N}. (4.25)

4.3. MULTIUSER WATER-FILLING ALGORITHMS 83
The scaling factors bk (k = 1, 2, 3) should satisfy the power constraints:
Xi∈I1
[1− b1g1(i)
]+ − b1P1 = 0, (4.26)
Xi∈I2
[1− b2g2(i)
]+ − b2P2 = 0, (4.27)
Xi∈I3
[1− b3g3(i)
]+ − b3P3 = 0. (4.28)
If we combine (4.27) and (4.28) together, we get
Xi∈I2,I3
·1− 1
max(g2(i)/b2, g3(i)/b3)
¸+− (b2P2 + b3P3) = 0. (4.29)
This equation leads us to treat user 2 and user 3 as a �new� single user, which has a
new channel characteristic and power constraint as follows:
h(i) = max(g2(i)/b2, g3(i)/b3), (4.30)
W2 = b2P2 + b3P3. (4.31)
Then the problem is simpliÞed to the two-user case and algorithm Load2User can
be directly applied. After water-Þlling, the frequency bands I1 for user 1 is Þxed
and algorithm Load2User is applied again to load user 2 and user 3 in the remaining
frequency bands. These two steps are repeated until a sufficiently good result is
obtained. The basic steps are:
1. h(i) = max(g2(i), g3(i)), W2 = P2 + P3
2. Load two users g1(i) and h(i) using Alg. Load2User . We get the scaling factor
b1 and two disjoint frequency bands I1 and I23.
3. Load user 2 and user 3 in the frequency bands I23 using Alg. Load2User . We
get the scaling factor b2 and b3.
4. gk(i) = gk(i)/bk, Pk = bkPk, k = 1, 2, 3

84 CHAPTER 4. MULTIUSER WATER-FILLING ALGORITHMS
1
b1g1-1(ω)
b2g2-1(ω)
b1P1
b3g3-1(ω)
b2P2 b3P3
“New User”
Figure 4.6: Water-Þlling diagram for three users.
5. Go back to Step 1.
Figure 4.6 illustrates the above steps. Note that the scaling factors bk could
violate the constraint in (4.25) and thus the solution is suboptimal. In other words,
some users may occupy those frequency bands that are not the best for them. In
order to know how close this solution is to the optimal, we derive an upper bound to
the capacity in the following. The capacity of a 3-user channel is (for clarity, we omit
the power constraints for Sk, �Sk and �S in the following equations)
C = maxSk
1
2
NXi=1
log2
Ã1 +
3Xk=1
Sk(i)gk(i)
!(4.32)
= max�Sk
1
2
NXi=1
log2
Ã1 +
3Xk=1
�Sk(i)gk(i)
bk
!(4.33)
≤ max�S
1
2
NXi=1
log2
µ1 + �S(i) max
k=1,2,3(gk(i)
bk)
¶(4.34)
= Cupper, (4.35)
where k and i are user and subchannel indices respectively, and �S(i) is the sum of
PSDs given by
�S(i) =3Xk=1
�Sk(i). (4.36)

4.3. MULTIUSER WATER-FILLING ALGORITHMS 85
Cupper is the upper bound to the capacity and can be calculated by the single-user
water Þlling method:
�S(i) = [l − mink=1,2,3
bkg−1k ]
+, (4.37)
NXi=1
�S(i) =3Xk=1
bkPk. (4.38)
Therefore, for any scaling factors bk (k = 1, 2, 3), we can calculate the upper bound
Cupper to the capacity using (4.34)(4.37)(4.38).
Remark 3 If the scaling factors bk satisfy the constraints in (4.25), then the upper
bound is achieved and represents the real capacity. In this optimal solution, only the
user with the maximum value of gk(i)/bk can use subchannel i and all other users�
PSDs are equal to 0 in this subchannel. So the equality holds in (4.34).
For a given set of the scaling factors bk, we can also calculate the achievable data
rates by
Rk =1
2
Xi∈Ik
log2
µ1 + �Sk(i)
gk(i)
bk
¶, k = 1, 2, 3, (4.39)
where �Sk(i) is each individual user�s PSD that is obtained from (4.24). In the practical
algorithm, when R1 + R2 + R3 is close enough to the upper bound of the capacity
Cupper, we can stop iterating and exit. The following is a water-Þlling algorithm for
three users.
Load3User(g1, g2, g3, P1, P2, P3, I)
1. ite = 1
2. While (ite ≤ max_ite)
(a) h = max(g2, g3),W = P2 + P3, ite = ite+1
(b) [b1, b23, I1, I23] = Load2User(g1, h, P1,W, I)
(c) [b2, b3, I2, I3] = Load2User(g2,g3,P2,P3,I23)

86 CHAPTER 4. MULTIUSER WATER-FILLING ALGORITHMS
(d) Calculate Cupper and R =P3
k=1Rk. If R/Cupper > target_ratio, break
(e) gk = gk/bk, Pk = bkPk, k = 1, 2, 3
3. Calculate PSD Sk
4. return Ik, Sk, k = 1, 2, 3
In this algorithm, the parameter max_ite is the maximum number of iterations
and target_ratio is the desired ratio of the achieved data rate over the capacity.
Simulations show that this algorithm is very efficient and needs only 2 or 3 iterations
to get a target_ratio of 99% on most multiaccess channels. However, this algorithm
can not guarantee that the optimal solution is achieved. So if target_ratio is set too
high (for example, 99.99%), it may not be able to achieve the ratio and the algorithm
will exit after a maximum number of iterations.
Next, we extend our algorithm toK users. The idea is that user 2,user 3, . . . , user
K are collectively bunched together as a �new user�, effectively reducing the K-user
problem to a 2-user problem for which Alg. Load2User directly applies. Next, with
the subchannels assigned to user 1 Þxed, the same approach is applied recursively to
User 2,User 3, . . . , User K over the rest of the subchannels. After these two steps,
we obtain the scaling factor bk for each user. In the third step, we scale the channel
characteristic gk by b−1k and consider it as the new channel characteristic. In other
words, User k now has the channel characteristic �gk = gk/bk and the power constraint�Pk = bkPk. Then, we repeat the Þrst two steps with the new channel characteristics
�gk and power constraints �Pk for all users until the data rate is close to the capacity.
The Þrst two steps are summarized in the following subroutine that is used later by
a water-Þlling algorithm for K users:
Load(G,P, I,K)
1. if (K = 2)
(a) [b(1:2), I(1:2)] = Load2User(G(1:2),P (1:2),I)
(b) return b, I

4.3. MULTIUSER WATER-FILLING ALGORITHMS 87
2. h = max(G(2), G(3), . . . , G(K)),W = P (2) + P (3) + . . .+ P (K)
3. [b(1), b2_new, I(1), I2_new] = Load2User(G(1),h,P (1),W ,I)
4. F = G(2 : K), PP = P (2 : K)
5. [b(2 : K), I(2 : K)] =Load(F, PP, I2_new,K − 1)
6. return b, I
In this subroutine, the inputs G,P are vectors containing the channel character-
istics and power constraints for each individual user. For example, G(2) represents
user 2�s channel characteristics and P (2) represents user 2�s total power constraint.
The input I is the set of the interested frequency band, which is {1, 2, . . . , N} for allthe users. The input K is the number of users. The outputs of this subroutine are
the scaling factors b and the frequency bands I for different users.
This subroutine is recursive since it calls itself in Line 5. Line 1 checks the
number of users. Line 2 sets the initial conditions by treating all other users as a
single �new� user. Line 3 applies Alg. Load2User to load user 1 and the new user.
Line 5 recursively calls itself with K − 1 users and the new frequency bands I2_new.This subroutine has a complexity of O(KN log2N).
Now we introduce the water-Þlling algorithm that calls the above subroutine
several times to achieve the near optimal solution.
LoadKUser(G,P, I,K)
1. fac(1 : K) = 1
2. for ite = 1 : max_ite
(a) [b, Inew] = Load(G,P, I,K)
(b) Compute Cupper and R =PK
i=1R1, If R/Cupper > target_ratio, break
(c) for i = 1 : K
i. G(i) = G(i)/b(i)

88 CHAPTER 4. MULTIUSER WATER-FILLING ALGORITHMS
ii. P (i) = b(i) ∗ P (i)iii. fac(i) = fac(i) ∗ b(i)
3. return fac, Inew
The inputs and the outputs of this algorithm are the same as the subroutine
above. This algorithm initially loads K users with the original characteristics G to
get the scaling factors b. Then each user�s channel is scaled by 1/b(i) and its power
is scaled by b(i). After scaling, K users are loaded again by Subroutine Load. The
above steps are repeated until the preset conditions are satisÞed.
This algorithm has a worst-case complexity of O(max_ite ·KN log2N ), where
max_ite is the maximum number of iterations allowed. Simulations show thatmax_ite
is typically on the order ofK while achieving data rates close to the capacity (R/Cupper >
98%). Loosely speaking, the algorithm has a complexity of O(K2N log2N ).
4.3.3 Unequal Priority : max(αR1 + (1− α)R2)This subsection describes a new algorithm to calculate the scaling factors b1, b2 where
two users have different priorities. The objective is to maximize the weighted sum of
the two users� data rates αR1 + (1 − α)R2, subject to individual power constraints.By sweeping the priority factor α from 0 to 1, we can obtain the capacity region of
Gaussian MAC. Without loss of generality, this chapter assumes α ∈ (0.5, 1]. Thediscrete optimal PSDs are
�S1(i) =
[α− b1g−11 (i)]+, if i ∈ I1[α− b1g−11 (i)]+ − �S2(i), if i ∈ I20, if i ∈ I3
(4.40)
�S2(i) =
0, if i ∈ I1[1− α− b2g−12 (i)· 2α−1b1g
−11 (i)−b2g
−12 (i)
]+,if i ∈ I2
[1− α− b2g−12 (i)]+, if i ∈ I3
(4.41)

4.3. MULTIUSER WATER-FILLING ALGORITHMS 89
where the frequency bands I1, I2, I3 are
I1 : b1g−11 (i) ≤ b2g−12 (i)
I2 : b2g−12 (i) < b1g
−11 (i) ≤ b2g−12 (i) + 2α− 1
I3 : b1g−11 (i) > b2g
−12 (i) + 2α− 1, (4.42)
and the scaling factors bn > 0, n = 1, 2 must satisfy the power constraints
NPi=1
�Sn(i)− bnPn = 0, n = 1, 2. (4.43)
There are three frequency bands for the optimal solution (Figure 4.4). In band I2,
two users share some of the frequency and thus the FDMA scheme is not optimal.
Furthermore, unlike the equal priority case, the scaling factor bn(n = 1, 2) cannot be
calculated easily from the power constraint equation (4.43) because of the frequency
sharing in the frequency band I2. An alternative approach is developed to obtain the
optimal solution by iterating over the scaling factors bn(n = 1, 2). First, two functions
are deÞned:
f(b1, b2) =NPi=1
�S1(i)− b1P1 (4.44)
g(b1, b2) =NPi=1
( �S1(i) + �S2(i))− (b1P1 + b2P2)
=NPi=1
[α− l(i)]+ − (b1P1 + b2P2) (4.45)
where
l(i) = min(b1g−11 (i), b2g
−12 (i) + 2α− 1).
Given a pair of scaling factors (b1, b2), the Þrst function f(b1, b2) represents the dif-
ference between the real allocated power and the power constraint for user 1. This
function tacitly depends on the scaling factor b2 through its implication on �S1, al-
though b2 does not appear in the right side of the equation. The second function
g(b1, b2) represents the difference between the allocated power for the two users and

90 CHAPTER 4. MULTIUSER WATER-FILLING ALGORITHMS
the total power constraint. The objective is to Þnd the optimal pairs of (b1, b2) such
that these two functions equal zero, i.e., to satisfy the power constraint.
Lemma 3 Suppose the scaling factors bn(n = 1, 2) satisfy (4.42). Then, the func-
tion f(b1, b2) is a strictly decreasing function of the variable b1 for a Þxed b2 and an
increasing function of the variable b2 for a Þxed b1. The function g(b1, b2) is a strictly
decreasing function of both the variables b1 and b2.
Proof. For a Þxed b2 , the bottom of the container for user 1 (b1g−11 ) goes up as
b1 increases. As a result, user 1 has a smaller number of subcarriers (i.e., I1, I2 are
smaller) because user 2 may occupy some subcarriers that were previously assigned to
user 1. Furthermore, the PSD of user 1 in frequency bands I1, I2 is smaller since the
bottom of the container goes up but the water level is Þxed at α. The scaled power
constraint b1P1 also becomes larger. Thus the function f(b1, b2) strictly decreases as b1increases. Inversely, for a Þxed b1, as b2 increases, user 1 takes over1 some subcarriers
from user 2 and thus f(b1, b2) increases.
The minimum bottom of the containers for two users is min(b1g−11 (i), b2g−12 (i) +
2α− 1). Whenever b1 or b2 increases, the bottom goes up but the water level is Þxed.The scaled power constraint b1P1 + b2P2 also increases. Therefore, g(b1, b2) strictly
decreases.
Theorem 4 If the scaling factor bn (n = 1, 2) satisÞes (4.42), then the curve f(b1, b2)
= 02 has a positive slope and the curve g(b1, b2) = 0 has a negative slope in the b1-b2plane. Furthermore, there is one unique intersection point that is the optimal solution.
Proof. Suppose f(m1,m2) = f(l1, l2) = 0 and l1 > m1. From Lemma 1, f(b1, b2)
strictly decreases with b1 for a Þxed b2. Hence,
0 = f(l1, l2) = f(m1,m2) > f(l1,m2)1For a Þxed b1, if b2 increases by only a small value, the frequency bands I1, I2, I3 could have the
same subcarriers due to the effect of the discrete channel characterics g(i). Hence, f(b1, b2) may notstrictly increase with b2.
2The curve f(b1, b2) = 0 may not exist for some points (b1, b2) because the channel characteristicsare discrete. In those points the function is discontinuous, i.e., f(b1, b2) < 0 and f(b1+δ, b2+η) > 0,δ and η are inÞnitesimal. In our analysis, those points are added to the curve to make the curvecontinous.

4.3. MULTIUSER WATER-FILLING ALGORITHMS 91
b2
b1b1max
b2max
A
B
C
D
f ≥ 0g ≥ 0
f ≤ 0g ≤ 0
f < 0g > 0
f > 0g < 0
L1:
L2:L3:
L4:
Figure 4.7: Two curves for f = 0 and g = 0. Binary search is used in both b1 andb2 axes.
To satisfy f(l1, l2) > f(l1,m2), l2 > m2 from Lemma 1. Thus f(b1, b2) has a positive
slope. The proof for the curve g(b1, b2) = 0 is similar.
Since these two curves are monotonic, there is only one unique intersection point.
This point is the optimal solution because it satisÞes the power constraints (f = 0, g =
0).
Figure 4.7 shows the two curves f(b1, b2) = 0 (CD) and g(b1, b2) = 0 (AB). In the
Þgure, points A and B correspond to g(b1A, 0) = 0 and g(0, b2max) = 0, respectively.
Points C and D correspond to f(b1C , 0) = 0 and f(b1D, b2max) = 0. As the curves are
monotonic, binary search will Þnd the intersection point. Since b1A cannot be easily
calculated from (4.45), instead the maximum value of the scaling factor b1 can be
found by the following equation
NXi=1
£α− b1maxg−11 (i)
¤+ − b1maxP1 = 0, (4.46)
which essentially does water Þlling for user 1 by ignoring user 2. It is easy to verify
that the intersection point in Figure 4.7 is to the left of b1max. Similarly, we can Þnd

92 CHAPTER 4. MULTIUSER WATER-FILLING ALGORITHMS
b2max by using the water-Þlling algorithm for user 2, ignoring user 1, i.e.,
NXi=1
£α− (b2maxg−12 (i) + 2α− 1)
¤+ − b2maxP2 = 0. (4.47)
Then, the range of the initial search is limited to the square formed by 0 ≤ b1 ≤ b1maxand 0 ≤ b2 ≤ b2max. The following describes how to reduce the search range and Þndthe optimum scaling pairs.
From lemma 1, f ≥ 0 if (b1, b2) is to the left side of curve CD and f ≤ 0 if
(b1, b2) is to the right side of curve CD. The same is true for the function g in terms
of curve AB. So the search square (b1 ≤ b1max,b2 ≤ b2max) can be divided into fourregions as shown in Figure 4.7. They are L1 : f ≥ 0, g ≥ 0, L2 : f ≥ 0, g ≤ 0,
L3 : f ≤ 0, g ≤ 0, and L4 : f ≤ 0, g ≥ 0. With this segmentation, it is only necessaryto know in which region is the current pair (b1, b2), instead of their exact values. For
example, if (b1, b2) is in region L1 (f(b1, b2) ≥ 0, g(b1, b2) ≥ 0), the optimal pair is tothe right. Thus the left limit of the next search is equal to b1. Similarly, if (b1, b2) is
in region L2, the optimal pair is below (b1, b2) and the new up-limit is set as b2. In the
binary search, the area of the search square is reduced by half after each iteration.
The following outlines the water-Þlling algorithm for a two-user Gaussain MAC with
unequal priorities:
Load2UserPriority(g1, g2, P1, P2,α)
1. calculate b1max from (4.46) and b2max from (4.47)
2. left = 0, right =b1max, up = b2max, down = 0, b1 = b1max, b2 = b2max
3. while (|f | > δ × (b1P1) & |g| > δ × (b1P1 + b2P2))
(a) b1 = (left+right)/2
(b) b2 = (up+down)/2
(c) if ( (b1, b2) ∈ L1) left =b1(d) if ( (b1, b2) ∈ L3) right=b1

4.3. MULTIUSER WATER-FILLING ALGORITHMS 93
(e) if ( (b1, b2) ∈ L2) up =b2(f) else ( (b1, b2) ∈ L4) down =b2
4. calculate I1, I2, I3 from (4.42) and PSDs from (4.40)(4.41).
5. return b1, b2, I1, I2, I3
Steps 1-2 set the initial conditions of the algorithm. Step 3 gives the stopping
criteria of the iterations. The variable δ is a small value that is determined by
the accuracy requirement of the applications. Practically, if δ = 10−3, the power
constraints are considered to be satisÞed and the result is optimum. Steps 3c − 3fdetermine in which region is the current pair (b1, b2) is (see Figure 4.7) and then
update the search range for (b1, b2).
This algorithm converges very fast because of the binary search in both b1 and b2axes. The complexity of this algorithm depends on the number of iterations needed
for both b1 and b2. Suppose M1 and M2 denote the numbers of the iterations for
b1 and b2 respectively, then the total number of iteration isM1+M2. The calculation
of f(b1, b2) and g(b1, b2) is O(N) if the channel characteristics g1 and g2 are sorted.
Thus, the total complexity ismax(O(M1N+M2N), O(N log2N)), where O(N log2N)
is the sorting complexity for g1 and g2. In fact, M1 and M2 are generally a small
number (less than 20). For example, if M1 +M2 = 40, the area of the Þnal search
square is less than 2−40b1maxb2max that is sufficiently accurate. Hence, this algorithm
approximately has a worst-case complexity of O(N log2N).
If α = 0.5, both users have the same priority, and this algorithm gives the same
solution as Alg. Load2User in Section 4.3.1 as expected. However, Alg. Load2User is
more efficient than Alg. Load2UserPriority because the latter involves many multi-
plications and divisions in each iteration to calculate the values of f and g.
4.3.4 Comments on Further Research
The work presented here is limited to only two users if they have different priorities.
It will be more interesting to derive an optimal water-Þlling algorithm for an arbitrary

94 CHAPTER 4. MULTIUSER WATER-FILLING ALGORITHMS
number of users with different priorities. The theoretic result is actually available in
[61].
In a DMT multiuser system, the bits in each subchannel are discretely loaded.
Therefore, extra algorithms are needed to efficiently quantize the bits in each subcar-
riers and redistribute the power across the whole frequency band. In [64], there are
more details on these types of algorithms for a single user channel.
4.4 Simulation Results
The algorithm for more than two users is suboptimal because it may result in some
users occupying subcarriers that may not be optimal for them. Therefore, we apply
it to many different channels to verify that it can achieve data rates very close to the
capacity. The channels shown here have the following characteristics:
gi(D) = a(i) + b(i)Dc(i) (4.48)
where D = e−jω and a(i), b(i), and c(i) are constant numbers for a given user i.
These numbers are generated by pseudo-random number generators. The constants
a(i) and b(i) are uniformly distributed in [−100, 100] and c(i) is uniformly distrib-uted in [−10, 10]. In the simulation, we also assume there are 10 users. The powerconstraint Pi is also generated by a pseudo-random generator ranging from 1 to 10.
The algorithm (LoadKUser) is applied to 100 different randomly-generated scenarios.
The results show that this algorithm achieves data rates (R1 +R2 + · · ·+R10) morethan 98% of the capacity in all the scenarios.
For simplicity, we illustrate the result of a 3-user example. The channel charac-
teristics of the three users are arbitrarily chosen as
g1 = 1 + 0.5D
g2 = 3− 1.6D2
g3 = 1.3 + 2D3

4.4. SIMULATION RESULTS 95
Iterations R =P
Ri Cupper R/Cupper
1 1.5653 1.5736 0.99472 1.5705 1.5709 0.99973 1.5708 1.5708 1
Table 4.1: Three-user channels loading process.
Iteration αR1+(1−α)R2 Capacity Ratio1 0.5928 0.6737 0.87994 0.6682 0.6737 0.99188 0.6735 0.6737 0.999712 0.6737 0.6737 1
Table 4.2: Two-user channel with unequal priority.
and the power constraint for each user is set to 1. Table 4.1 shows the achieved
data rate and the upper bound of the capacity (Cupper) after each iteration. In this
particular example, the optimal value is achieved after 3 iterations.
The other two algorithms for 2-user channels are exact and always converge to
the optimum solution. We simulated many different 2-user Gaussian multi-access
channels. The results show that they always converge very rapidly to the optimal
solution due to the binary search. We illustrate Alg. Load2UserPriority with another
arbitrarily chosen example. Suppose the two users have channel characteristics given
by
g1 = 1 + 0.6D − 1.9D3
g2 = 1− 0.7D2 + 1.4D8
where D = e−jω and the power constraint Pk, k = 1, 2 for each user is 1, and the
priority factor α is 0.7. The second column of Table 4.2 shows the achieved data rate
after a certain number of iterations. It can be seen that the ratio of the achieved data
to the capacity is very close to 1 after only 4 iterations (M1 +M2 = 4). Figure 4.8
shows the capacity region of this two-user Gaussian MAC.

96 CHAPTER 4. MULTIUSER WATER-FILLING ALGORITHMS
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.90
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8Capacity Region
R1
R2
Figure 4.8: The capacity region of the two-user Gaussian multiaccess channel.
4.5 Summary
This chapter presented three efficient water-Þlling algorithms for a Gaussian MAC for
three different scenarios. These algorithms are important for computing the capacity
region of the two-user Gaussian MAC and for Þnding the optimum transmit PSDs
for different users.
First, we described an optimal algorithm (Load2User) for two users with the same
priorities. In this scenario, an FDMA scheme achieves the capacity. This algorithm
sorts the ratio of the channel characteristics and uses binary search technique to Þnd
the best frequency partition for the two users. The computational complexity of this
algorithm is O(N log2N) , which is simpler than that of previous work.
Second, we extended this algorithm to K (K > 2) users (LoadKUser). Since the
exact solution for K users has prohibitive computational complexity O(NK(K−1)/2),
we proposed a heuristic algorithm with an approximate complexity ofO(K2N log2N).
Extensive simulation results show that this suboptimal algorithm achieves data rates
close to the capacity (more than 98% of the capacity in all the channels simulated).

4.5. SUMMARY 97
Lastly, we described an algorithm (Load2UserPriority) for two users with dif-
ferent priorities. In this scenario, an FDMA scheme does not achieve the optimal
solution, which implies the two users must share some of the frequency bands. As a
result, this algorithm takes a different approach by iterating over the scaling factors
and has a computational complexity of O(N log2N).

Chapter 5
Conclusions
Crosstalk among the twisted pairs in a telephone cable is a major impairment of
DSL systems. The severe crosstalk not only limits the data rate and the reach of
the services, but also affects its reliability and availability. Current DSL deployments
rely exclusively on the crosstalk model, not on the actual crosstalk environment.
The crosstalk model often represents the worst scenario and thus limit signiÞcantly
the overall system�s performance. Besides, the crosstalk model does not provide the
knowledge of the strong crosstalkers for any given pair, which makes the system
diagnosis very difficult.
Spectral compatibility is a critical issue in the heterogeneous DSL systems. A
spectrum management standard [29] is developed in ANSI committee T1 to limit the
signal powers from different systems. This standard is also based on the crosstalk
model. In this sense, it describes static spectrum management.
Recently, many DSL vendors and operators are interested in dynamic spectrum
management (DSM). The DSM principle is that every modem dynamically adjusts its
transmit PSD, based on the individual crosstalk environment. A new DSM standard
is currently pursued in ANSI subcommittee T1E1.4.
98

5.1. CROSSTALK IDENTIFICATIONS 99
5.1 Crosstalk IdentiÞcations
For both ILECs and CLECs, it is valuable to identify the crosstalk environment
for each pair because the crosstalk information can help them offer better services
to more users. However, because of the competitive nature of ILECs and CLECs,
there is little coordination between them so far and no crosstalk coupling functions
among the twisted pairs are available to the operators. This dissertation brings a new
idea of an impartial network maintenance center (NMC) that estimates the crosstalk
functions among the twisted pairs for all operators. The estimation process for the
crosstalk transfer functions includes four steps.
1. The NMC captures the signals from different modems for a pre-deÞned time du-
ration. The modems can belong to different service operators and offer different
services (HDSL, ADSL, SDSL, etc.).
2. Resample the input signals according to the clock rate of the receiver, if the
crosstalk signals and the primary signal have different sampling rate. This
step is to ensure the stationarity of the crosstalk transfer function. Without
resampling, the discrete crosstalk transfer functions are nonstationary.
3. Align the input and the output signals using a cross-correlation technique. This
alignment is necessary because the timing in each modem is not identical and
the pre-deÞned time periods have timing offsets. The cross-correlation technique
can also identify the dominant crosstalkers for a given line.
4. Estimate the crosstalk function using the least-squares method.
Theoretic analysis and simulation results both conÞrmed that the proposed tech-
nique can identify the crosstalk responses very accurate with a reasonable computa-
tional complexity. In fact, the crosstalk identiÞcation technique can also be imple-
mented within a single service operator. In this case, each operator has its own NMC.
However, only the crosstalk transfer functions among the operator�s own twisted pairs
can be identiÞed but the crosstalk transfer functions among the lines belonging to
different operators cannot be easily estimated.

100 CHAPTER 5. CONCLUSIONS
5.2 Crosstalk Cancellation
ADSL service has been the most widely deployed DSL service. To improve the data
rate or the line reach, methods are needed for an ADSL receiver to cancel or mitigate
the impact of the crosstalk from other types of services, such as HDSL, SDSL, and T1.
This dissertation presents two new methods to reduce the impact of one dominant
crosstalk.
The decision-aided method decodes the crosstalk signal based on the observation
in some frequency bands. The crosstalk signal is then reconstructed and cancelled
in other bands. The method has the problem of error propagation. The MMSE
estimation and cancellation method does not decode the crosstalk signal, but uses the
MMSE estimation result directly to construct the interference and cancel it in other
frequency bands. The latter approach is particularly better to suppress one HDSL
or SDSL NEXT because the decision-aided approach can not decode the crosstalk
signal reliably due to high attenuation and the signal loss in the low-frequency band
[0− 26 kHz]. Both methods hinge on the fact that the crosstalk signal has excessivebandwidth and there is redundant information in the excess band.
This dissertation also presents an intuitive explanation of crosstalk cancella-
tion, which provides the guidance to select the right frequency bands to estimate the
crosstalk signal. One interesting result of the MMSE estimation and cancellation is
that the gain of interference suppression is the same no matter if the crosstalk signal
is estimated in the main lobe or in the excess band. In general, the main lobe has
larger interference than the excess band. Therefore, if the crosstalk signal is estimated
in the main lobe, the interference caused by the excess band can be eliminated. Con-
versely, if the crosstalk signal is estimated in the excess band, the SINR gain in the
main lobe is equal to the interference to noise ratio in the excess band. The larger
the interference in the excess band, the better the suppression of the interference in
the main lobe. If there is no excess bandwidth, there is no performance improvement
by the proposed methods.
A fast computational algorithm is developed for practical implementation with

5.3. MULTIUSER WATER-FILLING ALGORITHMS 101
slightly degraded performance. This method avoids matrix inversion and large ma-
trix multiplication in every transmission block. In contrast, the traditional MMSE
estimation requires high computational complexity since the crosstalk signal is non-
stationary and large matrix inversion is need in every transmission block.
In conclusion, the MMSE estimation and cancellation scheme is very effective in
cancelling the crosstalk if the crosstalk has a large percentage of excess bandwidth.
In current DSL systems, NEXT into an ADSL receiver has a large excess bandwidth,
this method is therefore very effective for cancelling one dominant NEXT disturber.
5.3 Multiuser Water-Þlling Algorithms
This dissertation also presents three efficient water-Þlling algorithms for a Gaussian
MAC for three different scenarios. These algorithms are important for computing the
capacity region of the two-user Gaussian MAC and for Þnding the optimum transmit
PSDs for different users.
First, we described an optimal algorithm (Load2User) for two users with the
same priorities. In this scenario, an FDMA scheme achieves the capacity.
Second, we extended this algorithm to K (K > 2) users (LoadKUser). Since the
exact solution for K users has prohibitive computational complexity O(NK(K−1)/2),
we proposed a heuristic algorithm with an approximate complexity ofO(K2N log2N).
Extensive simulation results show that this suboptimal algorithm achieves data rates
close to the capacity (more than 98% of the capacity in all the channels simulated).
Lastly, we described an algorithm (Load2UserPriority) for two users with dif-
ferent priorities. In this scenario, an FDMA scheme does not achieve the optimal
solution, which implies the two users must share some of the frequency bands. As a
result, this algorithm takes a different approach by iterating over the scaling factors
and has a computational complexity of O(N log2N).

Appendix A
Proof of Equation (2.7)
The mean of the cross-correlation �Ryxi in (2.6) is
E( �Ryxi(l))
=1
N
NPm=1
KPj=1
vjPt=0
hj(t)E (xj(m− t+ dj)x∗i (m+ l))
=viXt=0
hi(t)Rxi(l + t− di)
= Ryxi(l).
Since the transmitted data are assumed to be zero mean and independent between
users, the variance of the cross-correlation �Ryxi contains three components:
σ2R = var( �Ryxi(l))
= σ2Ri + σ2Rj+ σ2Rn
where σ2Ri denotes the variance caused by user i, σ2Rj(j 6= i) is the variance caused
by other users, and σ2Rn is the variance from noise. The variance from user i is
σ2Ri = E
°°°° 1N NPm=1
vjPt=0
hi(t)xi(m− t+ di)x∗i (m+ l)°°°°2
−R2yxi(l).
102

103
The above equation is difficult to evaluate with no further assumptions. If the trans-
mitted data of user i are almost temporally uncorrelated (Rxi(l) ≈ εiδ(l)) and haveGaussian distributions, the variance can be approximated by
σ2Ri ≈1
Nε2i ||hi||2 (A.1)
where ||hi|| is the norm of the crosstalk function hi(t). The variance caused by otherusers is
σ2Rj =
E
°°°°° NPm=1
Pj 6=i
vjPt=0
hj(t)xj(m− t+ dj)x∗i (m+ l)°°°°°2
N2
≈ εiN
KXj=1,j 6=i
εj||hj||2 (A.2)
where K is the total number of users. The approximation is due to the assumption
that the transmitted data are temporally independent for each user and have Gaussian
distributions. The variance caused by noise is
σ2Rn =εiσ
2n
N(A.3)
where σ2n is the noise variance. Therefore, the variance of the cross-correlation �Ryxiis approximately
σ2R = var( �Ryxi(l))
≈ εiN
ÃKXj=1
εj||hj||2 + σ2n!.

Bibliography
[1] ITU, �A digital modem and analogue modem pair for use on the public switched
telephone network (PSTN) at data signalling rates of up to 56 000 bit/s down-
stream and up to 33 600 bit/s,� in ITU-T Recommendation V.90, Sept. 1998.
[2] T. Starr, J. M. Cioffi, and P. Silverman, Understanding Digital Subscriber Line
Technology. Prentice Hall, 1998.
[3] ITU, �Overview of digital subscriber line (DSL) recommendations,� in ITU-T
Recommendation G.995.1, Jun. 1999.
[4] ITU, �Digital transmission system on metallic local lines for ISDN basic rate
access,� in ITU-T Recommendation G.961, Mar. 1993.
[5] ITU, �High bit rate digital subscriber line tranceivers,� in ITU-T Recommenda-
tion G.991.1, Oct. 1998.
[6] G.-H. Im and J.-J. Werner, �Bandwidth-efficient digital transmission over un-
shielded twisted-pair wiring,� IEEE Journal on Selected Areas in Communica-
tions, vol. 13, pp. 1643�1655, Dec. 1995.
[7] ANSI, �High bit rate digital subscriber line - second generation,� in ANSI
T1E1.4/2000-006 HDSL2 Draft Standard, Feb. 2000.
[8] G. Ungerboeck, �Trellis-coded modulation with redundant signal sets. I. Intro-
duction,� IEEE Communications Magazine, vol. 25, pp. 5�11, Feb. 1987.
[9] ITU, �Single-pair high-speed digital subscriber line (SHDSL) transceivers,� in
ITU-T Recommendation G.991.2, Feb. 2001. To be published.
104

BIBLIOGRAPHY 105
[10] I. Kalet, �The multitone channel,� IEEE Transactions on Communications,
vol. 37, pp. 119�124, Feb. 1989.
[11] A. Ruiz, J. M. Cioffi, and S. Kasturia, �Discrete multiple tone modulation with
coset coding for the spectrally shaped channel,� IEEE Transactions on Commu-
nications, vol. 40, pp. 1012�1029, Jun. 1992.
[12] M. L. Doelz, E. T. Heald, and D. L. Martin, �Binary data transmission techniques
for linear system,� Proceedings of IRE, pp. 656�661, May 1957.
[13] J. A. C. Bingham, �Multicarrier modulation for data transmission : an idea
whose time has come,� IEEE Communications Magazine, pp. 5�14, May 1990.
[14] ANSI, �Very-high-bit-rate digital subscriber line (VDSL) metallic interface. Part
I: Functional requirements and common speciÞcation,� in ANSI T1E1.4/2000-
009R1 VDSL Draft Standard, Aug. 2000.
[15] ANSI, �Very-high-bit-rate digital subscriber line (VDSL) metallic interface. Part
III: Technical speciÞcation for a multi-carrier modulation tranceiver,� in ANSI
T1E1.4/2000-013R2 VDSL Draft Standard, Aug. 2000.
[16] ANSI, �Very-high-bit-rate digital subscriber line (VDSL) metallic interface. Part
II: Technical speciÞcation for single-carrier modulation (scm) tranceivers,� in
ANSI T1E1.4/2000-011R1 VDSL Draft Standard, Aug. 2000.
[17] W. D. Reeve, Subscriber loop signaling and transmission handbook : digital. IEEE
Press, 1995.
[18] K. Jacobsen, �Methods of upstream power backoff on very high-speed digital
subscriber lines,� IEEE Communications Magazine, vol. 39, pp. 210�216, Mar.
2001.
[19] W. Yu and J. M. Cioffi, �An adaptive multiuser power control algorithm for
VDSL,� submitted to IEEE Journal on Selected Areas in Communications: Spe-
cial Issue on Twisted-pair Transmission, 2001.

106 BIBLIOGRAPHY
[20] S. H. Lin, �Statistical behavior of multipair crosstalk,� Bell System Technical
Journal, pp. 955�974, Jul./Aug. 1980.
[21] J. H.W. Unger, �Near-end crosstalk model for line studies,� inANSI contribution
T1D1.3/85-244, Nov. 1985.
[22] C. Valenti, �Cable crosstalk parameters and models,� in ANSI contribution
T1E1.4/97-302, Sept. 1997.
[23] J. A. C. Bingham, ADSL, VDSL, and Multicarrier Modulation. John Wiley &
Sons, Inc., 2000.
[24] K. T. Foster and J. W. Cook, �The radio frequency interference (RFI) enviro-
ment for very high-rate transmission over metallic access wire-pairs,� in ANSI
contribution T1E1.4/95-020, Feb. 1995.
[25] J. A. C. Bingham, �RFI suppression in multicarrier systems,� inGlobecom, vol. 2,
pp. 1026�1030, Nov. 96.
[26] B. Wiese and J. A. C. Bingham, �Digital radio frequency cancellation for DMT
VDSL,� in T1E1.4/97-460, Dec. 1997.
[27] J. W. Cook, �Wideband impulsive noise survey of the access network,� British
Telecom Technical Journal, vol. 11, pp. 155�162, July 1993.
[28] P. Odling, B. Mayr, and S. Palm, �The technical impact of the unbundling
process and regulatory action,� IEEE Communications Magazine, vol. 38,
pp. 74�80, May 2000.
[29] ANSI, �Spectrummanagement for loop transmission systems,� inANSI Standard
T1.417, 2001.
[30] ITU, �Overview of TMN recommendations,� in ITU-T Recommendation M.3000,
Feb. 2000.
[31] J. M. Cioffi and et. al., �Example improvements of dynamic spectrum manage-
ment,� in ANSI contribution T1E1.4/2001-089, Feb. 2001.

BIBLIOGRAPHY 107
[32] C. Zeng, C. Aldana, A. Salvekar, and J. M. Cioffi, �Crosstalk identiÞcation in
xDSL systems,� to appear in IEEE Journal on Selected Areas in Communica-
tions: Special Issue on Multiuser Detection, 2001.
[33] C. Zeng and J. M. Cioffi, �Crosstalk cancellation in xDSL systems,� submitted to
IEEE Journal on Selected Areas in Communications: Special Issue on Twisted-
pair Transmission, 2001.
[34] C. Zeng, L. M. C. Hoo, and J. M. Cioffi, �Efficient water-Þlling algorithms for a
Gaussian multiaccess channel with ISI,� in IEEE Vehicular Technology Confer-
ence, pp. 1072�1077, Fall 2000.
[35] C. Zeng, L. M. C. Hoo, and J. M. Cioffi, �Optimal water-Þlling algorithms for
a Gaussian multiaccess channel with ISI,� in IEEE International Conference on
Communications, pp. 2421�2427, Jun. 2001.
[36] C. Zeng, L. M. C. Hoo, and J. M. Cioffi, �Water-Þlling algorithms for a Gaussian
multiaccess channel with ISI,� submitted to IEEE transactions on Communica-
tions, 2001.
[37] J. W. Cook, et. al., �The noise and crosstalk environment for ADSL and VDSL
systems,� IEEE Communications Magazine, vol. 37, pp. 73�78, May 1999.
[38] J. M. Cioffi, et. al., �Rejection of home LAN NEXT in VDSL via soft cancella-
tion,� in ETSI TM6 Standard Contributions TD15, (Edinburgh), Sept. 1999.
[39] K. Cheong, Multiuser Detection for DSL Applications. Ph.D. thesis, Stanford
University, 2000.
[40] G. C. Goodwin and R. L. Payne, Dynamic System IdentiÞcation: Experiment
Design and Data Analysis. Academic Press, 1977.
[41] V. Siskind, �Second moments of inverse Wishart-matrix elements,� Biometrika,
pp. 690�691, 1973.

108 BIBLIOGRAPHY
[42] P. Shaman, �The inverted complex Wishart distribution and its application to
spectral estimation,� Journal of Multivariate Analysis, vol. 10, pp. 51�59, 1980.
[43] C. H. Knapp and G. C. Carter, �The generalized correlation method for es-
timation of time delay,� IEEE Transactions on Acoustics, Speech, and Signal
Processing, vol. ASSP-24, pp. 320�327, Aug. 1976.
[44] T. Kailath, A. H. Sayed, and B. Hassibi, Linear Estimation. Prentice Hall, 1999.
[45] J. M. Cioffi and T. Kailath, �Fast, recursive-least-squares transversal Þlters for
adaptive Þltering,� IEEE Transactions on Acoustics, Speech, and Signal Process-
ing, vol. ASSP-32, pp. 304�336, 1984.
[46] J. M. Cioffi, �The block-processing FTF adaptive algorithm,� IEEE Transactions
on Acoustics, Speech, and Signal Processing, vol. ASSP-36, pp. 77�90, 1986.
[47] T. W. Anderson, An introduction to Multivariate Statistical Analysis. JohnWiley
& Sons, 1958.
[48] ITU, �Test procedures for digital subscribe line (DSL) transceivers,� in ITU-T
Recommendation G.996.1, Jun. 1999.
[49] F. Tarkoy, �Iterative multi-user decoding for asynchronous users,� in Interna-
tional Symposium on Information Theory, p. 30, 1997.
[50] M. Moher, �An iterative multiuser decoder for asynchronous BPSK users,� in
International Symposium on Information Theory, p. 423, 1998.
[51] B. R. Petersen and D. D. Falconer, �Minimummean square equalization in cyclo-
stationary and stationary interference-analysis and subscriber line calculations,�
IEEE Journal on Selected Areas in Communications, vol. 9, pp. 931�940, Aug.
1991.
[52] M. Abdulrahman and D. D. Falconer, �Cyclostationary crosstalk suppression
by decision feedback equalization on digital subscriber loop,� IEEE Journal on
Selected Areas in Communications, vol. 10, pp. 640�649, Apr. 1992.

BIBLIOGRAPHY 109
[53] ITU, �Asymmetric digital subscriber line (DSL) transceivers,� in ITU-T Recom-
mendation G.992.1, Jun. 1999.
[54] G. H. Golub and C. F. V. Loan, Matrix Computation. The John Hopkins Uni-
versity Press, 1996.
[55] G. D. Forney Jr. and M. V. Eyuboglu, �Combined equalization and coding using
precoding,� IEEE Communications Magazine, pp. 25�34, Dec. 1991.
[56] T. M. Cover and J. A. Thomas, Elements of Information Theory. John Wiley &
Sons Inc., 1991.
[57] S. Verdu, �Multiple-access channels with memory with and without frame syn-
chronism,� IEEE Transactions on Information Theory, vol. 35, pp. 605�619, May
1989.
[58] S. Verdu, �The capacity region of the symbol-asynchronous Gaussian multiple-
access channel,� IEEE Transactions on Information Theory, vol. 35, pp. 733�751,
July 1999.
[59] R. S. Cheng and S. Verdu, �Gaussian multiaccess channels with ISI: Capacity
region and multiuser water-Þlling,� IEEE Transactions on Information Theory,
vol. 39, pp. 773�785, May 1993.
[60] R. G. Gallager, Information Theory and Reliable Communication. John Wiley
& Sons Inc., 1968.
[61] D. N. C. Tse and S. V. Hanly, �Multiaccess fading channels - Part I: Polyma-
troid structure, optimal resource allocation and throughput capacities,� IEEE
Transactions on Information Theory, vol. 44, pp. 2796�2815, 1998.
[62] S. N. Diggavi, �Multiuser DMT: a multiple access modulation scheme,� in Globe-
com, vol. 3, pp. 1566�1570, Nov. 1996.
[63] W. Yu and J. M. Cioffi, �FDMA-capacity of the Gaussian multiple access channel
with ISI,� in IEEE International Conference on Communications, vol. 3, pp. 1365
�1369, Jun. 2000.

110 BIBLIOGRAPHY
[64] J. M. Cioffi, �Class notes on advanced digital communication.�
http://www.stanford.edu/class/ee379c, 2000.