
„Creating prototype of a robot - Komoro · cashier desk Using smart phone ... AVR Programmer, AVR...
20
„Creating prototype of a robot supporting people in their everyday life” Julian Żebrecki Supervised by– Mrs. Ewa Libiszewska Project supported by EU funds: Mazowiecki program stypendialny dla uczniów szczególnie uzdolnionych – najlepsza inwestycja w człowieka w roku szkolnym 2015/2016
Transcript of „Creating prototype of a robot - Komoro · cashier desk Using smart phone ... AVR Programmer, AVR...
„Creating prototype of a robot
supporting people
in their everyday life”
Julian Żebrecki
Supervised by– Mrs. Ewa Libiszewska
Project supported by EU funds: Mazowiecki program stypendialny dla
uczniów szczególnie uzdolnionych – najlepsza inwestycja w człowieka
w roku szkolnym 2015/2016
Presentation Agenda
Project Objectives
Hardware and Software
Line Follower
Lego Sorter
Shopping Robot
- Main Assumptions
- Final Results
- Work Continuation
Film
Project Objectives
Designing a robot carrying shopping basket and following shopper through a supermarket.
Building mechanical parts of a robot, enabling maneuvering through the market, safely carrying all collected goods to the cashier desk
Using smart phone transmitter and onboard receivers/detectors to locate shopper (basket owner) in the market and find direction of a robot movement
Writing an intelligent computer program enabling robot collision less movement through the market avoiding various obstacles like: shelves, product humps, other shoppers etc.
Objectives Hardware & Software
Program Code
Line Follower
Lego Sorter Shopping Robot
Film

• RoboRobo Kit, Atmega Processor, Rogic Program, Rogic Programming Language,
AVR Programmer, AVR Studio Program, C/C++ Programming Language
• Lego Mindstorms Kit, EV3 Program, EV3 Programming Language
• Arduino Board, Atmega Processor, Arduino Programming Environment, C/C++
Programming Language
Hardware and Software
Objectives Hardware & Software
Program Code
Line Follower
Lego Sorter Shopping Robot
Film
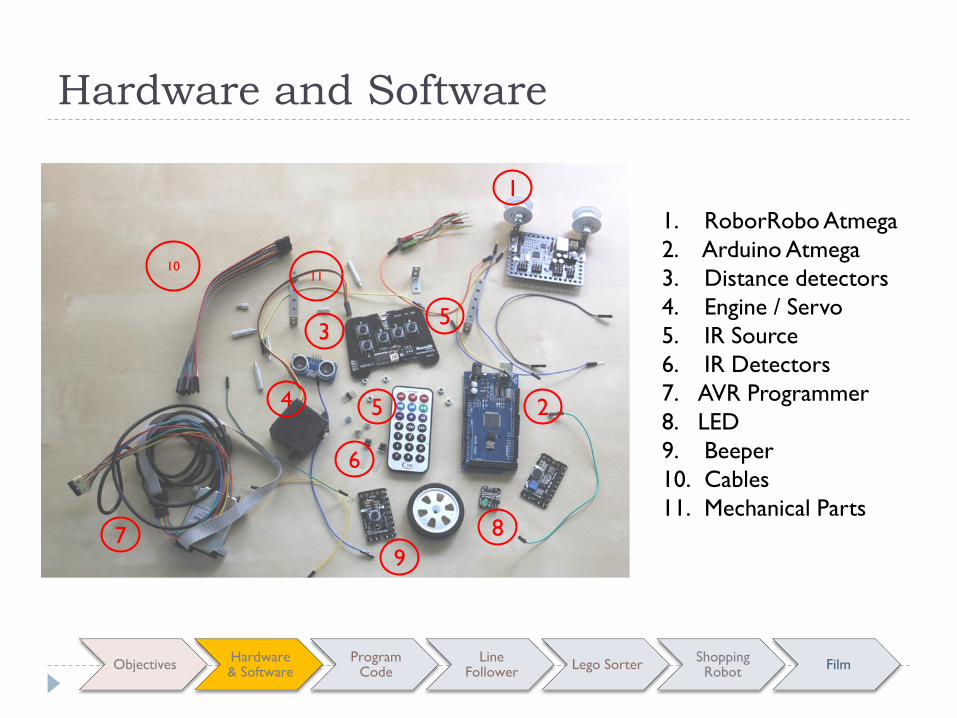
1. RoborRobo Atmega
2. Arduino Atmega
3. Distance detectors
4. Engine / Servo
5. IR Source
6. IR Detectors
7. AVR Programmer
8. LED
9. Beeper
10. Cables
11. Mechanical Parts
1
2
3
4
5
5
6
7 8
9
10 11
Hardware and Software
Objectives Hardware & Software
Program Code
Line Follower
Lego Sorter Shopping Robot
Film
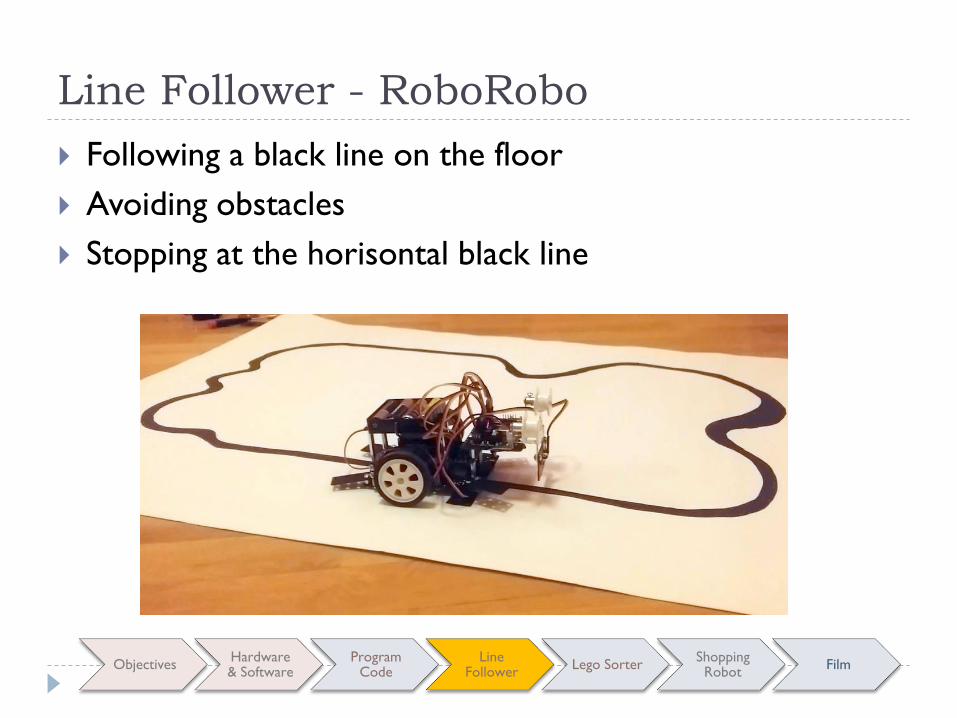
Line Follower - RoboRobo
Following a black line on the floor
Avoiding obstacles
Stopping at the horisontal black line
Objectives Hardware & Software
Program Code
Line Follower
Lego Sorter Shopping Robot
Film
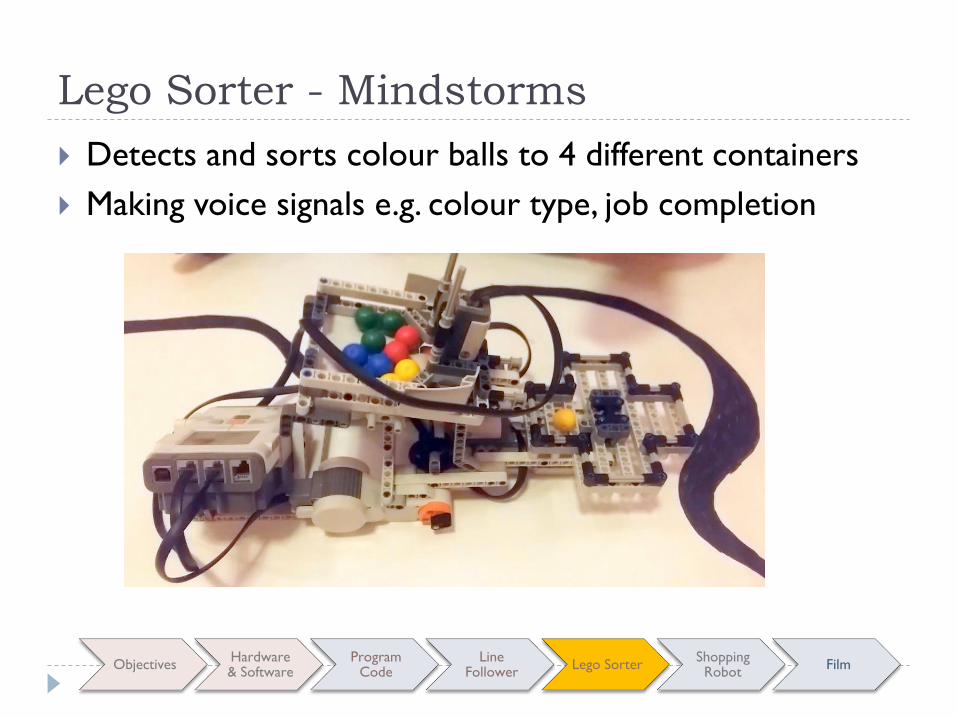
Lego Sorter - Mindstorms
Detects and sorts colour balls to 4 different containers
Making voice signals e.g. colour type, job completion
Objectives Hardware & Software
Program Code
Line Follower
Lego Sorter Shopping Robot
Film
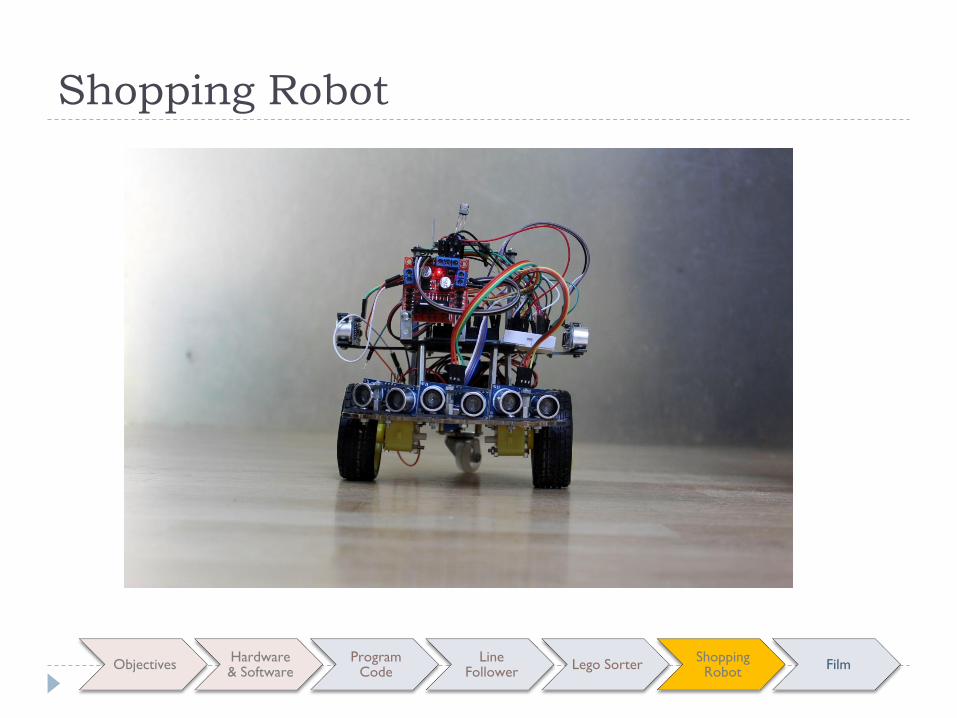
Shopping Robot
Objectives Hardware & Software
Program Code
Line Follower
Lego Sorter Shopping Robot
Film
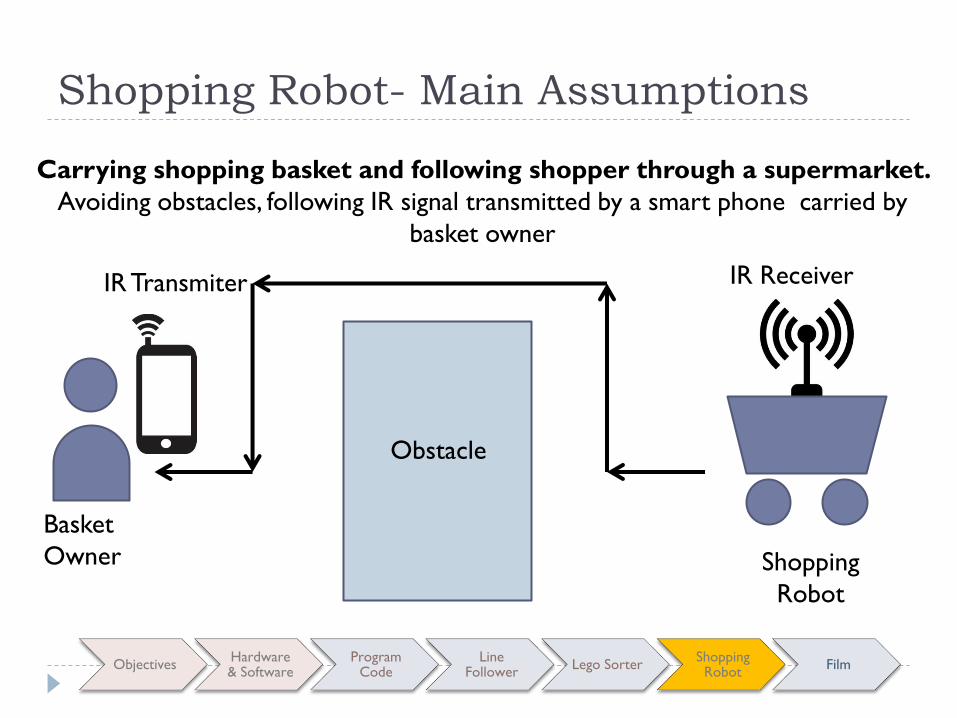
Shopping Robot- Main Assumptions
Shopping
Robot
Basket
Owner
Obstacle
Carrying shopping basket and following shopper through a supermarket.
Avoiding obstacles, following IR signal transmitted by a smart phone carried by
basket owner
IR Transmiter IR Receiver
Objectives Hardware & Software
Program Code
Line Follower
Lego Sorter Shopping Robot
Film
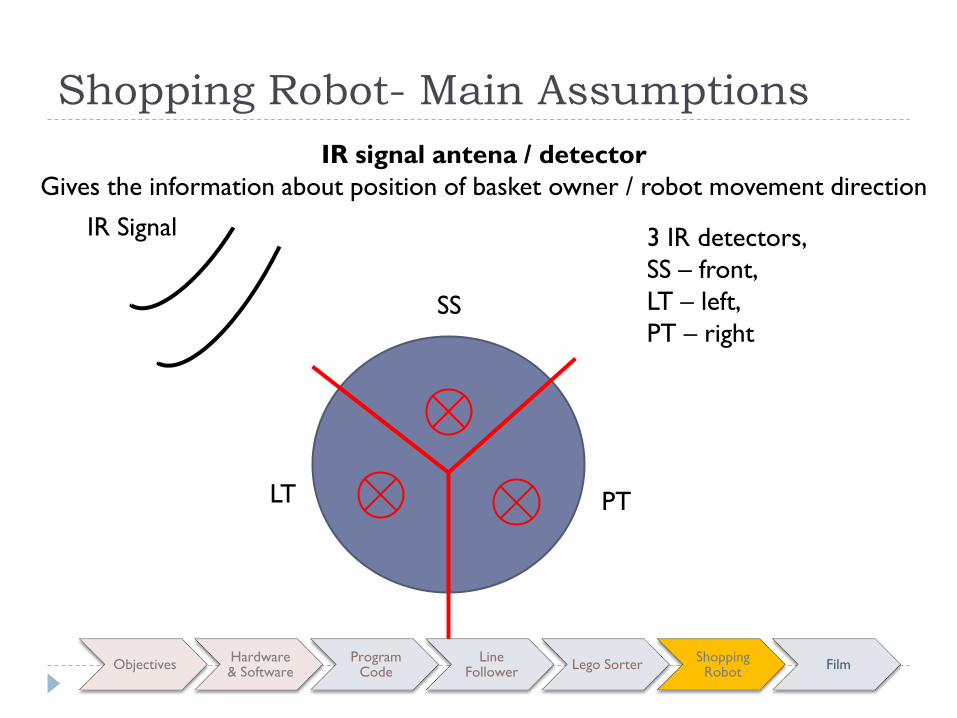
IR signal antena / detector
Gives the information about position of basket owner / robot movement direction
IR Signal
SS
LT PT
3 IR detectors,
SS – front,
LT – left,
PT – right
Shopping Robot- Main Assumptions
Objectives Hardware & Software
Program Code
Line Follower
Lego Sorter Shopping Robot
Film

Moving along an
obstacle
Distance corridors.
Making decisions based on
the corridor position
Shopping Robot- Main Assumptions
Obstacle
Obstacle
Distance [cm]
Objectives Hardware & Software
Program Code
Line Follower
Lego Sorter Shopping Robot
Film
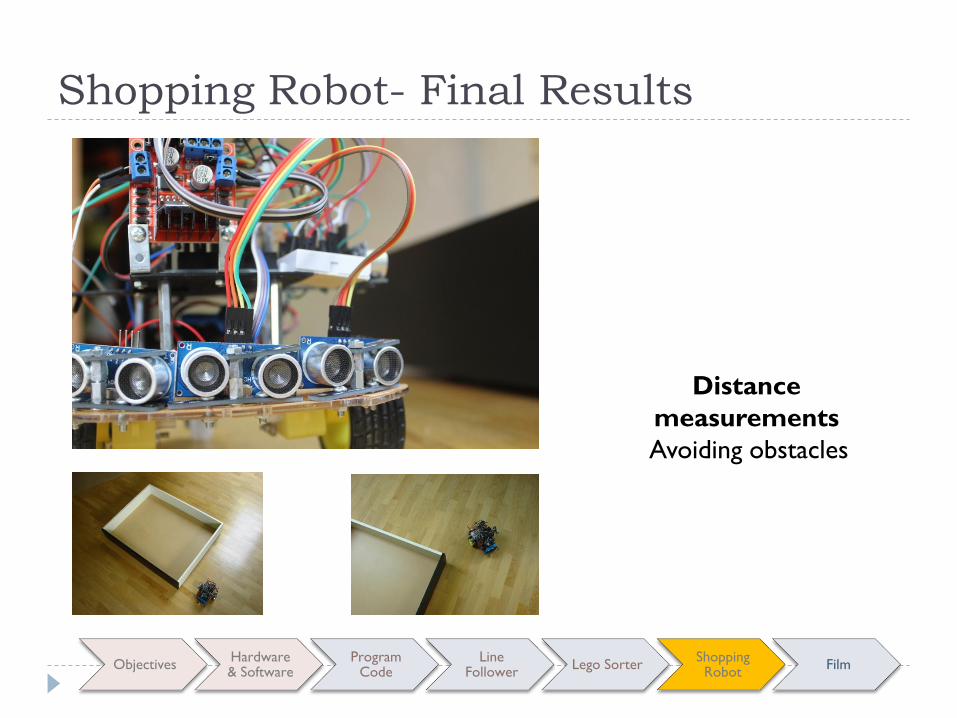
Distance
measurements
Avoiding obstacles
Shopping Robot- Final Results
Objectives Hardware & Software
Program Code
Line Follower
Lego Sorter Shopping Robot
Film
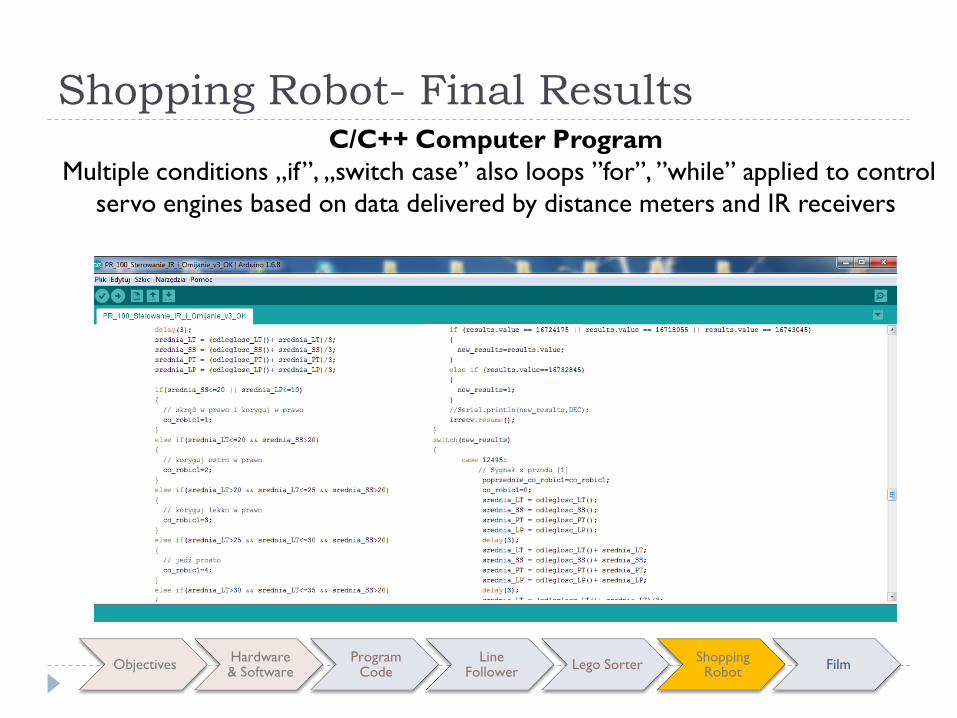
C/C++ Computer Program
Multiple conditions „if”, „switch case” also loops ”for”, ”while” applied to control
servo engines based on data delivered by distance meters and IR receivers
Shopping Robot- Final Results
Objectives Hardware & Software
Program Code
Line Follower
Lego Sorter Shopping Robot
Film
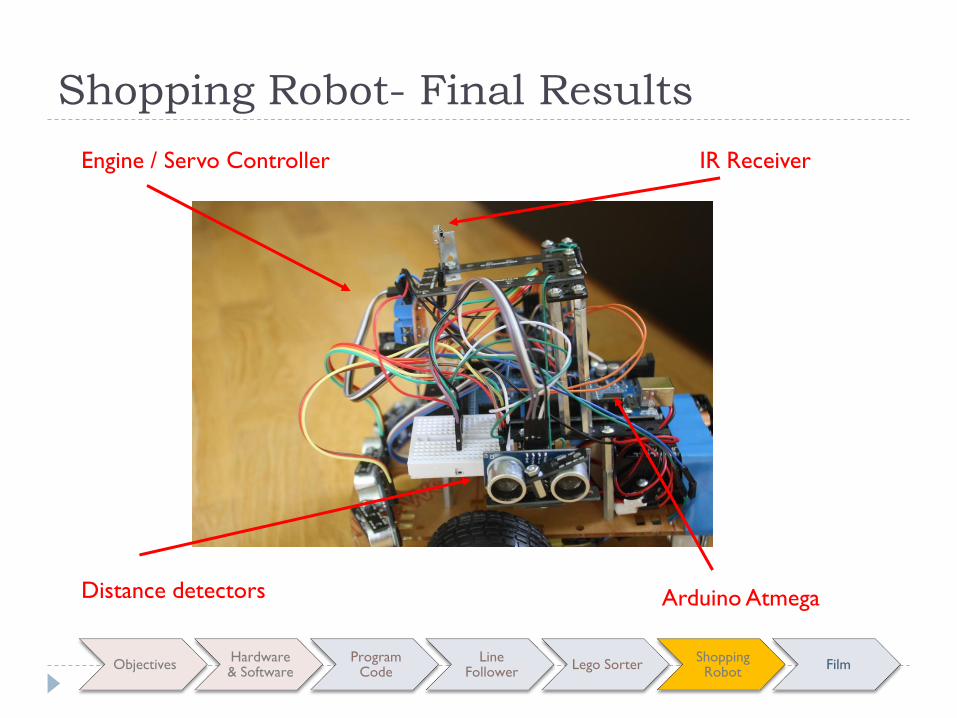
Arduino Atmega
Engine / Servo Controller
IR Receiver
Distance detectors
Shopping Robot- Final Results
Objectives Hardware & Software
Program Code
Line Follower
Lego Sorter Shopping Robot
Film
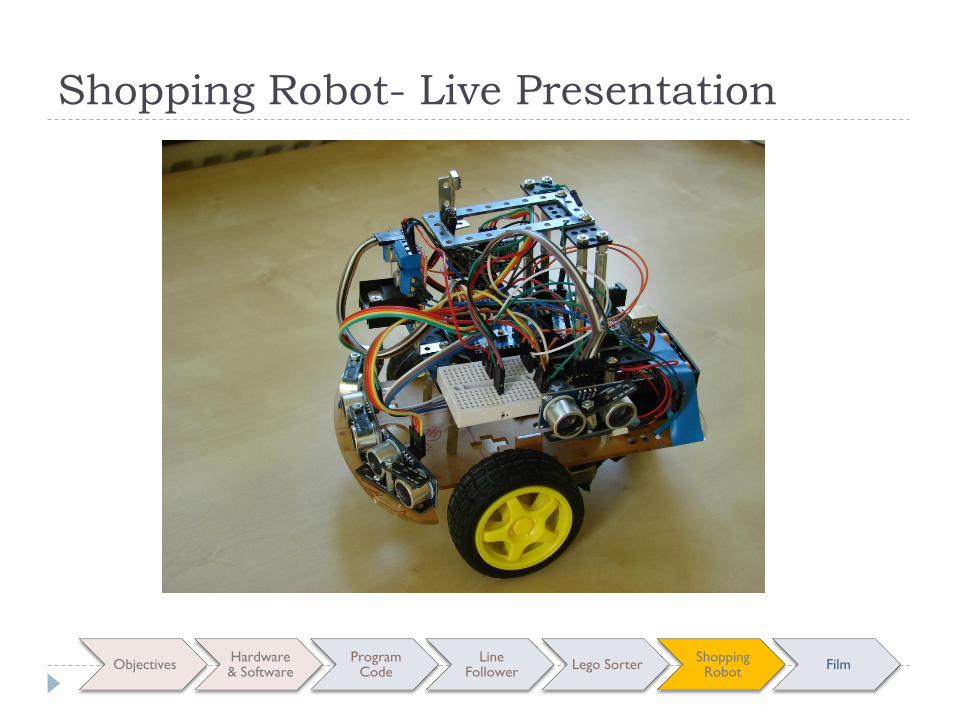
Shopping Robot- Live Presentation
Objectives Hardware & Software
Program Code
Line Follower
Lego Sorter Shopping Robot
Film

Developing robot prtototype: mechanical and software
Running along walls and obstacles, avoiding obstacles
Detecting IR signal from one receiver, making movement
direction decisions
Shopping Robot- Final Results
Objectives Hardware & Software
Program Code
Line Follower
Lego Sorter Shopping Robot
Film

Program time optimization
Add more distance detectores for precise movement
Add two additional IR receivers to better calculate
movement direction
Making real size robot based on prototype
Shopping Robot- Work Continuation
Objectives Hardware & Software
Program Code
Line Follower
Lego Sorter Shopping Robot
Film
Questions?
Film Presentation
Watch on YouTube
Objectives Hardware & Software
Program Code
Line Follower
Lego Sorter Shopping Robot
Film
Thank you for your attention
Julian Żebrecki


















