Coursefinal part2
118
1 Chapter 2 Geometric data acquisition techniques
-
Upload
mohamed-lotfi -
Category
Documents
-
view
236 -
download
0
Transcript of Coursefinal part2

1
Chapter 2Geometric data acquisition techniques

2
Geometric data acquisition techniques1. Traditional Surveying: A Brief SummaryPrior to the 1920s all surveying was done using ground methods, which include: a. Chain and compass: location of points using distance and direction from two
at least other points. This describes the standard process of triangulation. b. Levelling: vertical measurements by using a level and viewing a vertical staff.
Viewing the level of the staff visible in line with the observer gives a measure of the difference in elevation between the observer and the target.
c. Theodolites: these instruments enable the determination of vertical angle, distance and azimuth (direction) from observer to target.
In the last decade, new computer assisted methods have been developed: d. Total Stations: modern hybrid instrument incorporating digital theodolite and
computer.

3
2. Aerial Photography:Advantages of aerial photography over ground surveying:
a. Much easier than field ground work with chaining, triangulation etc.. especially in remote and rugged areas, and the nuisance of environmental factors such as mosquitos and weather conditions.
b. Overall air view reveals relationships not visible on the ground, such as subtle vegetation boundaries and location of archaeological sites.
Combined these created a huge reduction in fieldwork costs, and a huge increase in how quickly and accurately large areas could be mapped.
Digital Photogrammetry
Analytical
Photogrammetry

4
2. Aerial Photography:Advantages of aerial photography over ground surveying:
a. Much easier than field ground work with chaining, triangulation etc.. especially in remote and rugged areas, and the nuisance of environmental factors such as mosquitos and weather conditions.
b. Overall air view reveals relationships not visible on the ground, such as subtle vegetation boundaries and location of archaeological sites.
Combined these created a huge reduction in fieldwork costs, and a huge increase in how quickly and accurately large areas could be mapped.
Digital Photogrammetry
Analytical
Photogrammetry

5

6
3. Photogrammetrya. Distortions
Photos are not geometrically accurate or 'planimetric' due to several types of distortions: Plane movements
Tilt - plane has one wing higher than the other. Tip - nose and tail are not even. Swing - plane not heading in the planned flight direction.
Radial displacement: the camera is vertically overhead the photo centre; distance to the ground increases radially outward from the centre, resulting in slightly smaller scale. This is present on all photos but decreases with increased flight elevation.
Relief displacement: higher areas such as mountain tops are closer to the plane and have larger scale. b. Stereoscopic restoration of reliefViewing a single aerial photo will 'flatten' the terrain as it is viewed from above, making height hard to
interpret. Relief displacement listed above results in 'parallax' creating two different views from different angles; this can be used to restore the third dimension, which we can see as we have two eyes each with a slightly different view, and in mapping to create contour maps and spot elevation heights.
The most common way to restore depth and height in photos is to view a stereo pair of photos through a stereoscope, which will usually exaggerate the third dimension as the eyes only a few inches apart are presented with two photos that were taken from positions some miles apart.

7
Another method is known as an anaglyph, where the two photos are superimposed on one image, one photo in red, the other in blue. The viewer wears specially designed '3D' glasses with a blue and a red filter, which eliminates one image to each eye (also used in early 3D movies). More recent technology allows 3D viewing of merged images without glasses (such as popular 3D posters). If you have a glass eye or poor vision in one eye, none of these methods will work (Pirates may have had poor depth perception and missed boarding parties)
c. Flight line planningPhotos are taken systematically along a pre-determined flight line. Adjacent flight lines have 30%
overlap to ensure there are no 'gaps' between lines. Successive photos have a 60% overlap, to ensure coverage of every place on at least two photos

8
By taking two photos that overlap along a flight line stereoscopic image viewing becomes possible. This is done with a stereoscope or it can be done with trained eyes. Place your nose in the middle of the two pictures and pull out to 'fuse' the two together. When you can see three photos, its time to go for a drink.
d. ScaleThe approximate scale will determine the details visible and mappable scale, and is a function of two factors: the flying height above the ground and the camera lens focal length. Scale (RF) = focal length of camera / height above ground (most common lens are 6" or 12" focal length) e.g.. if focal length = 6" (1/2 foot) and height = 10, 000 feet RF = (1/2)/ 10,000 = 1/ 20,000 (this is approx due to scale distortions noted in 3a.) e. Ground Control Points (GCPs)Exact scaling requires 'restitution': the correction of distortions using known locations or ground control points (GCP). Usually a minimum of 5 points per photo are necessary: more may be needed as relief increases.

Global Positioning SystemGlobal Positioning System

Global Positioning SystemGlobal Positioning System
•Developed by US MilitaryDeveloped by US Military
•Network of 24 SatellitesNetwork of 24 Satellites
•Up to 12 visible at any timeUp to 12 visible at any time
•Used for Military, Commercial, and Personal Used for Military, Commercial, and Personal NavigationNavigation


ESSC 541-542 Lecture 4.14.05 12
GPS Satellites (Satellite Vehicles(SVs))
• First GPS satellite launched in 1978
• Full constellation achieved in 1994
• Satellites built to last about 10 years
• Approximately 2,000 pounds,17 feet across
• Transmitter power is only 50 watts or less

This animation This animation shows how the shows how the GPS receiver can GPS receiver can see the satellites see the satellites as they pass as they pass overhead.overhead.
NASA/JPL

GPSGPS ReceiversReceivers

GPS InformationGPS Information
LATITUDELATITUDE
LONGITUDELONGITUDE
Number and Number and Location of Location of SatellitesSatellites
Satellite Signal Satellite Signal StrengthStrength
ElevationElevation AccuracyAccuracy

How does the GPS know where I am?How does the GPS know where I am?

GGPPSS

The line The line where two where two spheres spheres intersect intersect forms a forms a circle.circle.

GGPPSS

Why Does Elevation Change?Why Does Elevation Change?
• As the Earth rotates As the Earth rotates and the satellites and the satellites move, it appears to move, it appears to the GPS that you are the GPS that you are moving up and down moving up and down in relation to the in relation to the ellipsoid. That is why ellipsoid. That is why the elevation number the elevation number constantly changes.constantly changes.

ESSC 541-542 Lecture 4.14.05 21
Standard Positioning Service (SPS)
• Available to all users
• Accuracy degraded by Selective Availability until 2 May 2000– Horizontal Accuracy: 100m
• Now has roughly same accuracy as PPS

ESSC 541-542 Lecture 4.14.05 22
Control Segment
Master Control Station
Monitor Station
Ground Antenna
ColoradoSprings
Hawaii AscensionIslands
DiegoGarcia
Kwajalein
Monitor and Control

ESSC 541-542 Lecture 4.14.05 23
Control Segment: Maintaining the System
(5) Monitor Stations
Correct Orbitand clockerrors Create new navigation message
Observeephemerisand clock
Falcon AFBUpload Station

ESSC 541-542 Lecture 4.14.05 24
How the system works
Space Segment24+ Satellites
The Current Ephemeris is Transmitted to Users
Monitor Stations Diego Garcia Ascension Island Kwajalein Hawaii Colorado Springs
GPS Control Colorado Springs
End User

25
Remote SensingWhat is remote sensing?Remote sensing is the science and art of obtaining information about a phenomena without being in
contact with it. Remote sensing deals with the detection and measurement of phenomena with devices sensitive to electromagnetic energy such as:
Light (cameras and scanners) Heat (thermal scanners) Radio Waves (radar) How is remote sensing useful? It provides a unique perspective from which to observe large regions. Sensors can measure energy at wavelengthswhich are beyond the range of human vision (ultra-violet, infrared, microwave). Global monitoring is possible from nearly any site on earth.Background InformationElectromagnetic Spectrum Energy Interactions Digital Imaging Remote Sensing Training Main Points:The Electromagnetic Spectrum The electromagnetic spectrum is a continuum of all electromagnetic waves arranged according to
frequency and wavelength. The sun, earth, and other bodies radiate electromagnetic energy of varying wavelengths. Electromagnetic energy passes through space at the speed of light in the form of sinusoidal waves. The wavelength is the distance from wavecrest to wavecrest (see figure below).

26
Light is a particular type of electromagnetic radiation that can be seen and sensed by the human eye, but this energy exists at a wide range of wavelengths. The micron is the basic unit for measuring the wavelength of electomagnetic waves. The spectrum of waves is divided into sections based on wavelength. The shortest waves are gamma rays, which have wavelengths of 10e-6 microns or less. The longest waves are radio waves, which have wavelengths of many kilometers. The range of visible consists of the narrow portion of the spectrum, from 0.4 microns (blue) to 0.7 microns (red).
UV (ultra violet) <400 VIS (visible) 400 - 700NIR (near infrared) 700 - 1300MIR (middle infrared) 1300 - 3000TIR (thermal infrared) 3000 - 14000FIR (far infrared) 14000 - 1000000

27
Energy Interactions with the Earth's SurfaceWhen electromagnetic energy from the sun hits the earth's surface three fundamental energy
interactions are possible. Various fractions of the energy are:Reflected Absorbed TransmittedThe proportions of energy reflected, absorbed, and transmitted will vary for different earth features. These differences permit us to distinguish different features on an image.Spectral Reflectance Curves (or how to distinguish astro-turf from grass)The figure below shows typical spectral reflectance curves for three basic types of earth features: healthy green vegitation, dry bare soil, and clear lake water. These curves indicate how much incident energy would be reflected from the surface, and subsequently recorded by a remote sensing
instrument. At a given wavelength, the higher the reflectance, the brighter the object appears in an image.
Note that vegetation reflects much more energy in the near-infrared (0.8 to 1.4 microns) than it does in visible light (0.4 to 0.7 microns). The amount of energy that vegetation reflects is related to the internal structure of the plant, and the amount of moisture in the plant. A surface like astro-turf, which is colored green, will appear dark in the near infrared, because it doesn't have the internal structure of living vegetation. Another feature to notice is that clear water reflects visible light only, so it will appear dark in infrared images.

28
Chapter 3GIS Data Model
Vector Data model

29
A. INTRODUCTION Vector data model • based on vectors (as opposed to space-occupancy raster structures) • fundamental primitive is a point • objects are created by connecting points with straight lines
– some systems allow points to be connected using arcs of circles • areas are defined by sets of lines
– the term polygon is synonymous with area in vector databases because of the use of straight-line connections between points
• very large vector databases have been built for different purposes – vector tends to dominate in transportation, utility, marketing applications – raster and vector both used in resource management applications
B. "ARCS" • when planar enforcement is used, area objects in one class or layer cannot overlap and must
exhaust the space of a layer • every piece of boundary line is a common boundary between two areas • the stretch of common boundary between two junctions (nodes) has various names
– edge is favored by graph theorists, "vertex" for the junctions – chain is the word officially sanctioned by the US National Standard – arc is used by several systems
• arcs have attributes which identify the polygons on either side – these are referred to as "left" and "right" by reference to the sequence in which the arc is
coded • arcs (chains/edges) are fundamental in vector GIS

30
Storing areas • two ways of storing areas: • polygon storage
– every polygon is stored as a sequence of coordinates – although most boundaries are shared between two adjacent areas, all are input and coded
twice, once for each adjacent polygon – the two different versions of each internal boundary line may not coincide – difficult to do certain operations, e.g. dissolve boundaries between neighboring areas and
merge them – used in some current GISs, many automated mapping packages
• arc storage – every arc is stored as a sequence of coordinates – areas are built by linking arcs – only one version of each internal shared boundary is input and stored – used in most current vector-based GISs
C. DATABASE CREATION • database creation involves several stages:
– input of the spatial data – input of the attribute data – linking spatial and attribute data
• spatial data is entered via digitized points and lines, scanned and vectorized lines or directly from other digital sources – once the spatial data has been entered, much work is still needed before it can be used
Building topology • once points are entered and geometric lines are created, topology must be "built"
– this involves calculating and encoding relationships between the points, lines and areas – this information may be automatically coded into tables of information in the database

31
Editing • during this topology generation process, problems such as overshoots, undershoots and spikes are
either flagged for editing by the user or corrected automatically – automatic editing involves the use of a tolerance value which defines the width of a buffer
zone around objects within which adjacent objects should be joined – tolerance value is related to the precision with which locations can be digitized – these edit procedures include such functions as snap, move, delete, split, join, etc.
Relationship between digitizing and editing • digitizing and editing are complementary activities
– poor digitizing leads to much need for editing – good digitizing can avoid most need for editing – both can be very labor-intensive
• the process used to digitize area objects can affect the need for later editing: • in "blind" digitizing all linework is digitized once as "noodles" in any order
– it is unlikely that the building and cleaning operations will be able to automatically sort out area objects unambiguously from the resulting jumble
• some systems require the user to identify junctions between digitized "noodles" explicitly – usually by touching a special button on the cursor – mistakes in building topology are less likely
• some systems require the user to digitize each individual arc/chain separately – much easier to sort out polygons - less need for editing
• some systems support the building of topology "on the fly" – the system searches constantly for complete area objects as digitizing proceeds – the user is informed by a sound or by blinking as soon as the object is detected

32
Edgematching • compares and adjusts features along the edges of adjacent map sheets • some edgematches merely move objects into alignment • others "join" the pieces together logically - conceptually they become one
object – the user "sees" no interruption
• an edgematched database is "seamless" - the sheet edges have disappeared as far as the user is concerned
D. ADDING ATTRIBUTES • once the objects have been formed by building topology, attributes can be
keyed in or imported from other digital databases • once added to the database, attributes must be linked to the different objects
– attributes can be linked by pointing to the appropriate object on the screen and coding its corresponding object ID into the attribute table
• unlike many raster GIS systems, attribute data is stored and manipulated in entirely separate ways from the locational data

33
GIS Components
There are two basic types of map information in a GIS: SPATIAL and DESCRIPITIVE - Spatial refers to geographic features that are represented as POINTS, LINES, and POLYGONS. Descriptive refers to TABULAR DATA which records characteristics of the geographic features.
Point • Defined as a single x,y cordinate used to describe a geographic• feature. the point is the simplest type of spatial object.
• Choice of entities which are represented as points depends • on the scale of the map/study. on a large scale (small area) • maps building can be encoded as point locations. On a • small scale map (large area) cities can be encoded as point locations.
Information on a set of points can be stored in an attribute table. Each row in the attribute table relates to one point
• each column is an attribute

34
Each point is independent of every other point, represented as a separate row in the database model. Points can represent two generic types of features in a GIS. The first is a point feature which represents the actual geographic location of a feature, the second is a label point which resides within a polygon to provide attribute information. A label point does not represent the location of a geographic feature, it represents the polygon within which it resides.
LINE DATA The line is made up of an ordered set of coordinates linked in a chain to represent the shape and
length of a feature such as a road. The decision to represent a feature as a line is scale dependent if the linear feature occupies space at a 1:1 scale.
Other terms for line are ARC and VECTOR The coordinates used to define the length and shape of a line are redefined points linked
together. The terms that describe the points used to define a line are NODE and VERTICE A NODE is located at each end of the line identifying the start and end.
VERTICES define the shape of the line and occupy the location between the two nodes

35
NODES- three types: TRUE NODES: a true node is located at the intersection of three or more arcs
and forms the junction between the arcs.
PSEUDO NODES: are located between two arcs linked together. In this use, the node resides at the normal location of a vertice and acts to separate the characteristics of two sections of the same line .
DANGLING NODES: are located at the end of one arc defining it's end and not linked to another arc.

Terminology
• Point: x, y coordinate identifying a geographic location
• Link (line, arc): an ordered set of points with a node at the beginning and end of it
• Node: the beginning and end of link (often defined where 3 or more lines connect)
• Polygon: two or more links connected at the nodes, contains a point inside to identify the polygons attributes

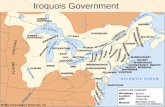
California
Nevada Utah
Arizona

Identify the polygons

Create the polygon attribute table (PAT)
Poly-IDPoly-ID NameName PopulationPopulation
11 CaliforniaCalifornia 3309021433090214
22 NevadaNevada 18182591818259
33 UtahUtah 21352522135252
44 ArizonaArizona 47903114790311

Identify the nodes

Node table
Node IDNode ID X-coordX-coord Y-coordY-coord
11
22
33
44
55
66
77
88

Identify the links (arcs, lines)

Simplify this

Create the topology!Links table
Link#Link# FNodeFNode TNodeTNode LPolyLPoly RPolyRPoly
11
22
33
44
55
66
77
88
99
1010
1111

Nodes FirstLink#Link# FNodeFNode TNodeTNode LPolyLPoly RPolyRPoly
11 11 22
22 22 33
33 22 66
44 66 55
55 33 44
66 44
77 55
88 44
99 77
1010 33
1111 88

Nodes FirstLink#Link# FNodeFNode TNodeTNode LPolyLPoly RPolyRPoly
11 11 22
22 22 33
33 22 66
44 66 55
55 33 44
66 44 55
77 55 77
88 44 77
99 77 88
1010 33 88
1111 88 11

PolygonsLink#Link# FNodeFNode TNodeTNode LPolyLPoly RPolyRPoly
11 11 22 11 00
22 22 33 11 44
33 22 66 44 00
44 66 55 44 00
55 33 44
66 44 55
77 55 77
88 44 77
99 77 88
1010 33 88
1111 88 11

PolygonsLink#Link# FNodeFNode TNodeTNode LPolyLPoly RPolyRPoly
11 11 22 11 00
22 22 33 11 44
33 22 66 44 00
44 66 55 44 00
55 33 44 22 44
66 44 55 33 44
77 55 77 33 00
88 44 77 22 33
99 77 88 22 00
1010 33 88 11 22
1111 88 11 11 00

Identify the points

Link ListLink#Link# List of pointsList of points
11 1,2,3,4,5,6,7,8,9,10… etc1,2,3,4,5,6,7,8,9,10… etc
22
33
44
55
66
77
88
99
1010
1111

Point Coordinates
IDID X-coordX-coord Y-coordY-coord
11
22
33
44
55
66
77
88
9 (etc)9 (etc)

Putting it all togetherPoly-IDPoly-ID NameName PopulationPopulation
11 CaliforniaCalifornia 3309021433090214
22 NevadaNevada 18182591818259
33 UtahUtah 21352522135252
44 ArizonaArizona 47903114790311Link#Link# List of pointsList of points
11 1,2,3,4,5,6,7,8,9,10… etc1,2,3,4,5,6,7,8,9,10… etc
22
33
44
55
66
77
88
99
1010
1111
Point-Point-IDID
X-coordX-coord Y-coordY-coord
11
22
33
44
55
66
77
88
9 9 (etc)(etc)
Link#Link# FNodeFNode TNodeTNode LPolyLPoly RPolyRPoly
11 11 22 11 00
22 22 33 11 44
33 22 66 44 00
44 66 55 44 00
55 33 44 22 44
66 44 55 33 44
77 55 77 33 00
88 44 77 22 33
99 77 88 22 00
1010 33 88 11 22
1111 88 11 11 00
Node Node IDID
X-coordX-coord Y-Y-coordcoord
11
22
33
44
55
66
77
88

Putting it all togetherPoly-IDPoly-ID NameName PopulationPopulation
11 CaliforniaCalifornia 3309021433090214
22 NevadaNevada 18182591818259
33 UtahUtah 21352522135252
44 ArizonaArizona 47903114790311
Link#Link# List of pointsList of points
11 1,2,3,4,5,6,7,8,9,10… etc1,2,3,4,5,6,7,8,9,10… etc
22
33
44
55
66
77
88
99
1010
1111
Point-Point-IDID
X-coordX-coord Y-coordY-coord
11
22
33
44
55
66
77
88
9 9 (etc)(etc)
Link#Link# FNodeFNode TNodeTNode LPolyLPoly RPolyRPoly
11 11 22 11 00
22 22 33 11 44
33 22 66 44 00
44 66 55 44 00
55 33 44 22 44
66 44 55 33 44
77 55 77 33 00
88 44 77 22 33
99 77 88 22 00
1010 33 88 11 22
1111 88 11 11 00
Node Node IDID
X-coordX-coord Y-Y-coordcoord
11
22
33
44
55
66
77
88

Putting it all togetherPoly-IDPoly-ID NameName PopulationPopulation
11 CaliforniaCalifornia 3309021433090214
22 NevadaNevada 18182591818259
33 UtahUtah 21352522135252
44 ArizonaArizona 47903114790311
Link#Link# List of pointsList of points
11 1,2,3,4,5,6,7,8,9,10… etc1,2,3,4,5,6,7,8,9,10… etc
22
33
44
55
66
77
88
99
1010
1111
Point-Point-IDID
X-coordX-coord Y-coordY-coord
11
22
33
44
55
66
77
88
9 9 (etc)(etc)
Link#Link# FNodeFNode TNodeTNode LPolyLPoly RPolyRPoly
11 11 22 11 00
22 22 33 11 44
33 22 66 44 00
44 66 55 44 00
55 33 44 22 44
66 44 55 33 44
77 55 77 33 00
88 44 77 22 33
99 77 88 22 00
1010 33 88 11 22
1111 88 11 11 00
Node Node IDID
X-coordX-coord Y-Y-coordcoord
11
22
33
44
55
66
77
88

Putting it all togetherPoly-IDPoly-ID NameName PopulationPopulation
11 CaliforniaCalifornia 3309021433090214
22 NevadaNevada 18182591818259
33 UtahUtah 21352522135252
44 ArizonaArizona 47903114790311
Link#Link# List of pointsList of points
11 1,2,3,4,5,6,7,8,9,10… etc1,2,3,4,5,6,7,8,9,10… etc
22
33
44
55
66
77
88
99
1010
1111
Point-Point-IDID
X-coordX-coord Y-coordY-coord
11
22
33
44
55
66
77
88
9 9 (etc)(etc)
Link#Link# FNodeFNode TNodeTNode LPolyLPoly RPolyRPoly
11 11 22 11 00
22 22 33 11 44
33 22 66 44 00
44 66 55 44 00
55 33 44 22 44
66 44 55 33 44
77 55 77 33 00
88 44 77 22 33
99 77 88 22 00
1010 33 88 11 22
1111 88 11 11 00
Node Node IDID
X-coordX-coord Y-Y-coordcoord
11
22
33
44
55
66
77
88

Putting it all togetherPoly-IDPoly-ID NameName PopulationPopulation
11 CaliforniaCalifornia 3309021433090214
22 NevadaNevada 18182591818259
33 UtahUtah 21352522135252
44 ArizonaArizona 47903114790311
Link#Link# List of pointsList of points
11 1,2,3,4,5,6,7,8,9,10… etc1,2,3,4,5,6,7,8,9,10… etc
22
33
44
55
66
77
88
99
1010
1111
Point-Point-IDID
X-coordX-coord Y-coordY-coord
11
22
33
44
55
66
77
88
9 9 (etc)(etc)
Link#Link# FNodeFNode TNodeTNode LPolyLPoly RPolyRPoly
11 11 22 11 00
22 22 33 11 44
33 22 66 44 00
44 66 55 44 00
55 33 44 22 44
66 44 55 33 44
77 55 77 33 00
88 44 77 22 33
99 77 88 22 00
1010 33 88 11 22
1111 88 11 11 00
Node Node IDID
X-coordX-coord Y-Y-coordcoord
11
22
33
44
55
66
77
88

A look behind the scenes: Vector GIS data models
• Spaghetti model• Topological vector model• Cardinality (this is gonna hurt!)• Break

The Spaghetti Model
• The spaghetti model is the most simple vector data model
• The model is a direct representation of a graphical image
• NO explicit topological information

Spaghetti Model
• Description: direct line for line translation of the paper map (often viewed as raw digital data)
• Pros: easy to implement, good for fast drawing
• Cons: storage and searches are sequential, storage of attribute data

Spaghetti model

Topology
• Branch of mathematics dealing with geometric properties
• Geometry of objects remain invariant under transformations
• Neighborhood relationships remain the same• Topology is the distinguishing basis for more
complicated vector models

Topological Vector Model• Topological data models are provided with information that
can help us in obtaining solutions to common operations in advanced GIS analytical techniques.
• This is done by explicitly recording adjacency information into the data structure, eliminating the need to determine it for multiple operations.
• Each line segment, the basic logical entity in topological data structures, begins and ends when it either contacts or intersects another line, or when there is a change in direction of the line.

Topological Vector Model
• Each line has two sets of numbers, a pair of coordinates and an associated node number.
• Each line segment has its identification number that is used as a pointer to indicate which set of nodes represent its beginning and ending.

Topological Vector Model
• Polygons also have identification codes that relate back to the link numbers. Each link in the polygon now is capable of looking left and right at the polygon numbers to see which two polygons are also stored explicitly, so that even this tedious step is eliminated.
• The Topological data model more closely approximates how we as map readers identify the spatial relationships contained in an analog map document.

Topological Vector Model

How do we preserve topology ina computer database?
• What are we storing?– Points, lines, polygons
• What do we need to preserve? – Neighborhood relationships between these
objects
• Terminology– point, link, node, polygon

67
•The examples above are simple relationships within a GIS. The following examples are more complex and are logically separated into various types of relationships.RELATIONSHIPS WHICH CAN BE COMPUTED FROM THE COORDINATES OF THE OBJECTS
•Two lines can be examined to see if they cross by identifying the shared node•Areas can be examined to see which one encloses a given point•Areas can be examined to see if they overlap
RELATIONSHIPS WHICH CANNOT BE COMPUTED FROM COORDINATES - THESE MUST BE CODED IN THE DATABASE DURING INPUT
• E.G. We can compute if two lines cross, but not if the highways they represent intersect (may be an overpass)
POINT-POINT• "IS WITHIN", e.g. Find all of the customer points within 1 km of this retail store point
• "IS NEAREST TO", e.g. Find the hazardous waste site which is nearest to this ground water well
POINT-LINE•"ENDS AT", e.g. Find the intersection at the end of this street
•"IS NEAREST TO", e.g. Find the road nearest to this aircraft crash site

68
POINT-AREA•"IS CONTAINED IN", e.g. Find all of the customers located in this zip code boundary•"CAN BE SEEN FROM", e.g. Determine if any of this lake can be seen from this viewpoint
LINE-LINE
• "CROSSES", e.g. Determine if this road crosses this river• "COMES WITHIN", e.g. Find all of the roads which come within 1 km of this railroad•"FLOWS INTO", e.g. Find out if this stream flows into this river
LINE-AREA
• "CROSSES", e.g. Find all of the soil types crossed by this railroad• "BORDERS", e.g. Find out if this road forms part of the boundary of this airfield
AREA-AREA
• "OVERLAPS", e.g. Identify all overlaps between types of soil on this map and types of land use on this other map• "IS NEAREST TO", e.g. Find the nearest lake to this forest fire• "IS ADJACENT TO", e.g. Find out if these two areas share a common boundary

Spatial relationships
• “adjacent to”• “connected to”• “near to”• “intersects with”• “within”• “overlaps”• etc.

Spatial relationships
• logical connections between spatial objects represented by points, lines and polygons
• e.g., - point-in-polygon- line-line- polygon-polygon

Spatial relationships
• some relationships are stored in a topological data model- “adjacent to”
right poly and left poly in the line attribute table
- “connected to”list of lines that share the samenode in the node attribute table
• others need to be computed

“is nearest to”• point/point
- which family planningclinic is closest to thevillage?
• point/line- which road is nearestto the village
• same with other combinations of spatial features

“is nearest to”:Thiessen polygons

“is near to”: buffer operations
• point buffer- affected area around a polluting facility- catchment area of a water source

buffer operations
• line buffer- how many people live near the polluted river?- what is the area impacted by highway noise?

buffer operations
• polygon buffer- area around a reservoir where development should not be permitted

“crosses”: line intersection
• when traveling to the dispensary, do farmers have to cross this river?

“is within”: point in polygon
• which of the cholera cases are within the contaminated water catchment area?

Point in polygon
even number of intersections: point is outsideodd number of intersections: point is inside

80
TOPOLOGY (for vector data)
• What is topology?• Why is important?• Three types of topological models in GIS• Spatial operations of topology– Contiguity– Connectivity
• Trade-offs of topological structure

81
Spatial features and spatial relationships
• Spatial features in maps – Points, lines and polygons
• Human being interprets additional information from maps about the spatial relationships between features– A route trace from an airport to a house– Land contiguity adjacent to streets along which
the lands are located

82
The definition of Topology
• The spatial relationships can be interpreted– identification of connecting lines along a path– definition of the areas enclosed within these lines– identification of contiguous areas
• In digital maps, these relationships are depicted using ‘Topology’
• Topology = A mathematical procedure for explicitly defining spatial relationship
• Topology is the description of how the spatial objects are related with spatial meaning

83
Topological data models
• Three types of topological concepts– Arc, Node and polygon topologies
• Arc– Arcs have directions and left and right polygons
(=contiguity)• Node– Nodes link arcs with start and end nodes (=connectivity)
• Polygon– Arcs that connect to surround an area define a polygon
(=area definition)

84
Terms and concepts
ToNode
LeftPolygon
RightPolygon
FromNode
Connectivity - from and to nodesContiguity - Polygon EnclosureAdjacency - from Direction
Arc

85
Spatial operations of topology• Connectivity and contiguity (Aronoff, 1989)
– A basic, but core spatial analysis operations in GIS• Contiguity
– A biologist might be interested in the habitats that occur next to each other
– A city planner might be interested in zoning conflicts such as industrial zones bordering recreation areas
• Connectivity– Transportation network, telecommunication systems, river systems– To find optimum routings or most efficient delivery routes or the
fastest travel route– To predict loading at critical points in a river channel– To estimate water flow at a bridge crossing that will result from heavy
flood

86
Trade-offs of topology
• Advantages– Spatial data is stored more efficiently– Analysis process faster and efficient for large data sets– By topological relationships, we can perform spatial
analysis functions,– Modelling flow through the connection of lines in a
network (i.e. buffering)– Combining adjacent polygons with similar characteristics
(i.e. spatial merge)– Overlaying geographical features (i.e. spatial overlay)

87
Disadvantages
• Extra cost and time– creating topological structure does impose a cost– Topology should be always updated when a new map or
existing map is updated• Additional batch job working– To avoid the extra efforts, GIS systems need to run a batch
job (i.e. a process that can be run without user interactions); 70% of total GIS costs
– Autoexec.bat in DOS– Macro languages such as AML (Arc/Info), Avenue
(ArcView), MapBasic (MapInfo) and etc

88
Conclusions of topology
• When topology is created, we can identify–Know its positions of spatial features
–Know what is around it
–Understand its geographical characteristics by virtue of recognising its surroundings
–Know how to get from A to B

89
VECTOR GIS CAPABILITIES A. INTRODUCTION •analysis functions with vector GIS are not quite the same as with raster GIS more operations deal with objects
•measures such as area have to be calculated from coordinates of objects, instead of counting cells •some operations are more accurate
•estimates of area based on polygons more accurate than counts of pixels •estimates of perimeter of polygon more accurate than counting pixel boundaries on the edge of a zone
•some operations are slower •e.g. overlaying layers, finding buffers
•some operations are faster •e.g. finding path through road network
B. SIMPLE DISPLAY AND QUERY Display •using points and "arcs" can display the locations of all objects stored •attributes and entity types can be displayed by varying colors, line patterns and point symbols •may only want to display a subset of the data
•e.g. want to display areas of urban landuse with some base map data •select all political boundaries and highways, but only areas that had urban land uses
•how would the user do this? •e.g. one of the layers in a database is a "map" of land use, called USE •area objects on this layer have several attributes •one attribute, called CLASS, identifies the area's land use •for urban land use, it has the value "U" •need to extract boundaries for all areas that have CLASS="U"

90
SQL extensions for spatial queries some systems allow specifically spatial queries to be handled under SQL e.g. WITHIN operator
SELECT <objects> WITHIN <specific area >the criteria for these spatial searches may include searching within the radius of a point, within a bounding rectangle, or within an irregular polygon C. RECLASSIFY, DISSOLVE AND MERGE reclassify, dissolve and merge operations are used frequently in working with area objects these are used to aggregate areas based on attributes consider a soils map :
we wish to produce a map of major soil types from a layer that has polygons based on much more finely defined classification scheme Steps
1 .reclassify areas by a single attribute or some combination e.g. reclassify soil areas by soil type only
2 .dissolve boundaries between areas of same type by delete the arc between two polygons if the relevant attributes are the same in both polygons

91

92

93
D. TOPOLOGICAL OVERLAY suppose individual layers have planar enforcement (required in many systems, not all)
when two layers are combined ("overlayed", "superimposed") the result must have planar enforcement as well new intersection must be calculated and created wherever two lines cross a line across an area object creates two new area objects topological overlay is the general name for overlay followed by planar enforcement relationships are updated for the new, combined map
result may be information about relationships (new attributes) for the old (input) maps rather than the creation of new objects e.g. overlay map of school districts on census tracts result is map showing every school district/census tract combination for each combination, the database contains an area object
however, concern may be with obtaining the number of overlapping census tracts as a new attribute of each school district rather than with new objects themselves Point in polygon overlay point objects on areas, compute "is contained in" relationship result is a new attribute for each point e.g. combine wells and planning districts, find district containing each well

94
Line on polygon overlay line objects on area objects, compute "is contained in" relationship lines are broken at each area object boundary number of output lines is greater than number of input lines containing area is new attribute of each output line e.g. combine streams and counties, find county containing each stream segment Polygon on polygon ("Polygon overlay") overlay two layers of area objects boundaries are broken at each intersection number of output areas likely greater than the total number of input areas
e.g. input watershed boundaries, county boundaries, output map of watershed/county combinations
after overlay we can recreate either of the input layers by dissolving and merging based on the attributes contributed by the input layer Example wish to use find those areas that are the best land for timber harvesting after overlay, each original layer contributes attributes to the combined layer we get the final map by selecting the desired attributes of the combined layer
SELECT FROM OVERLAY WHERE Species = "Jack pine" AND Soil = "C "

95
E. BUFFERING a buffer can be constructed around a point, line or area
buffering creates a new area, enclosing the buffered object applications in transportation, forestry, resource management protected zone around lakes and streams zone of noise pollution around highways
service zone around bus route (e.g. 300 m walking distance) groundwater pollution zone around waste site
options available for raster, such as a "friction" layer, do not exist for vector
buffering is much more difficult in vector from the point of view of the programmer
sometimes, width of the buffer can be determined by an attribute of the object
e.g. buffering residential buildings away from a street network :
three types of street (1, 2, 3 or major, secondary, tertiary) with the setbacks being 600 feet from a major street, 200 feet from a secondary street, and only 100 feet from a tertiary street
problems with buffer operations may occur when buffering very convoluted lines or areas

Overlay operations in a GIS• Origins in Landscape Planning
– Literally overlaying maps on a light table and searching for overlapping areas
– GIS started out at GSD in the 1960s• Set theory – polygons represent sets, overlay represents
intersects and unions
• Computational Geometry

Simplest form of overlay Point in polygon procedure
• Count how many intersections of the ray, originating at point A, pass through edges of the polygon
Line intersects1 edge of polygon
Odd number ofIntersections = inside,Even = outside
A

Line intersections
y = a1 + b1x and y = a2 + b2x intersect at: xi = - (a1 - a2) / (b1 - b2), yi = a1 + b1xi
And checking for the values of xi to see thatIt falls within the x values of each of the lines.
xi, yi

General overlay types
• Identity– spatial join or point-in-polygon
• Clip– similar to set extent when using raster data
• Intersection• Union• Buffer
(for all of the above, operations are on layers,not single polygons)

Spatial Join
Point in polyogonoperation – whichpoints are in the Polygon?
Polygon ID (id_1) isadded to the pointlayer’s attribute table.

Clip
A B
A BC
Two polygons, A nd B,Overlap. Clip A using Bas a cookie cutter.
Clip operation creates anew polygon, C, whichis the intersect, or overlap,of A and B. Attributes of Ado not appear in C.

Intersect
A B
A BC
Two polygons, A nd B,Overlap. Find theIntersection of A using B.
Intersect operation creates anew polygon, C, whichis the intersection, or overlap,of A and B. Attributes of Aand B do appear in C.

Union
A B
A BC
Two polygons, A nd B,Overlap. Find the intersectionof A using B.
Intersect operation creates anew polygon, C, whichis the intersect, or overlap,of A and B. Attributes of Ado appear in C. A and B are Also part of the union and retainTheir attributes.

Buffer
Buffers are polygonshapes that surrounda feature by a uniformdistance. Buffers canbe created around points,lines, and polygons.
Buffers don’t share theattributes of the feature that they surround. Usespatial Joins to add theattributes.
Original points (black) are surroundedby a buffer of 25 meters.

Precision vs accuracy in overlay operations
• Data precision vs computer precision– Computer can be infinitely precise– Data appears precise but can be inaccurate.
• Sliver polygons – meaningful?– Decide by size, dimensions, number of arcs,
but there is no hard and fast rule.

Sliver polygons
A B
C
D
E
Overlay operations oftenproduce sliver polygons,which may or may notbe meaningful.
The intersection of polygon Awith a layer containing polygonsC and D produce a layer withpolygons D and E. E is a sliverpolygon and may be considerednoise.

“overlaps”: Polygon overlay
layer 1 layer 2 overlay
A
B
III
III
1 I2 II3 III
1 A I2 A II3 B II4 B I5 B III
12
3
45
1 A2 B
Output layer containsall attributes from both input layers

Areal interpolation problem
• data need to be transferred from one set of zones to another, where the boundaries are not compatible between the zones
• reporting zone change• data for different sets of areas need to
be combined

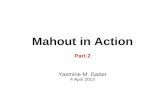
Polygon overlayHospital CatchmentAreas Districts
Overlay

Areal weighting
• if 30 % of district d overlaps with hospital zone z, then zone z will also receive 30% of district d’s population
• areas of overlap derived from a polygon overlay operation
• assumes that districts have constant densities

Creating subsets
• create a subset of a data set using another incompatible set
• “cookie-cutting”
A
B
CAA
B
C
input clip cover output

Appending data sets
• combine data sets that may have been digitized separately
AA
B
C
B
C AA
B
C

Edge matching
• often required after appending data sets
AA
B
C
B
C AA
B
C

Merging polygons
• aggregation by deleting internal boundaries

Merging polygons• attribute data cannot be merged
automatically, since different data types need to be treated differently- categorical data: need to use specific rules- count data need to be aggregated

Merging polygons
• some systems only preserve the field that indicates which features to merge (e.g., the state name)
• in others, the user needs to define which method to use to merge datae.g., sum, average, most common value or others

Editing functions
• removal of sliver polygons
• line snapping
• rubber sheeting
matching features using user-defined links
(e.g., for removing distortions in GIS data
sets)

Network functions
• Shortest route• Allocation• Accessibility• Many more functions based on
optimization models