Counting Everyday Objects in Everyday Scenesopenaccess.thecvf.com/content_cvpr_2017/papers/...Figure...
10
Counting Everyday Objects in Everyday Scenes Prithvijit Chattopadhyay *,1 Ramakrishna Vedantam *,1 Ramprasaath R. Selvaraju 1 Dhruv Batra 2 Devi Parikh 2 1 Virginia Tech 2 Georgia Institute of Technology 1 {prithv1,vrama91,ram21}@vt.edu 2 {dbatra,parikh}@gatech.edu Abstract We are interested in counting the number of instances of object classes in natural, everyday images. Previous count- ing approaches tackle the problem in restricted domains such as counting pedestrians in surveillance videos. Counts can also be estimated from outputs of other vision tasks like object detection. In this work, we build dedicated models for counting designed to tackle the large variance in counts, appearances, and scales of objects found in natural scenes. Our approach is inspired by the phenomenon of subitizing – the ability of humans to make quick assessments of counts given a perceptual signal, for small count values. Given a natural scene, we employ a divide and conquer strategy while incorporating context across the scene to adapt the subitizing idea to counting. Our approach offers consis- tent improvements over numerous baseline approaches for counting on the PASCAL VOC 2007 and COCO datasets. Subsequently, we study how counting can be used to im- prove object detection. We then show a proof of concept application of our counting methods to the task of Visual Question Answering, by studying the ‘how many?’ ques- tions in the VQA and COCO-QA datasets. 1. Introduction We study the scene understanding problem of counting common objects in natural scenes. That is, given for ex- ample the image in Fig. 1, we want to count the number of everyday object categories present in it: for example 4 chairs,1 oven,1 dining table,1 potted plant and 3 spoons. Such an ability to count seems innate in humans (and even in some animals [10]). Thus, as a stepping stone towards Artificial Intelligence (AI), it is desirable to have intelligent machines that can count. Similar to scene understanding tasks such as object de- tection [43, 14, 18, 37, 17, 44, 34, 29] and segmenta- tion [4, 30, 36] which require a fine-grained understanding of the scene, object counting is a challenging problem that * Denotes equal contribution. Bottle : 3 Spoon : 3 Chair : 4 Potted Plant : 1 Dining Table : 1 Oven : 1 Figure 1: We study the problem of counting everyday objects in every- day scenes. Given an everyday scene, we want to predict the number of instances of common objects like bottle, chair etc. requires us to reason about the number of instances of ob- jects present while tackling scale and appearance variations. Another closely related vision task is visual question answering (VQA), where the task is to answer free form natural language questions about an image. Interestingly, questions related to the count of a particular object - How many red cars do you see? form a significant portion of the questions asked in common visual question answering datasets [2, 35]. Moreover, we observe that end-to-end net- works [2, 35, 31, 15] trained for this task do not perform well on such counting questions. This is not surprising, since the objective is often setup to minimize the cross- entropy classification loss for the correct answer to a ques- tion, which ignores ordinal structure inherent to counting. In this work we systematically benchmark how well cur- rent VQA models do at counting, and study any benefits from dedicated models for counting on a subset of counting questions in VQA datasets in Sec. 5.4. Counts can also be used as complimentary signals to aid other vision tasks like detection. If we had an estimate of how many objects were present in the image, we could use that information on a per-image basis to detect that many objects. Indeed, we find that our object counting models improve object detection performance. We first describe some baseline approaches to counting and subsequently build towards our proposed model. 1135
Transcript of Counting Everyday Objects in Everyday Scenesopenaccess.thecvf.com/content_cvpr_2017/papers/...Figure...

Counting Everyday Objects in Everyday Scenes
Prithvijit Chattopadhyay∗,1 Ramakrishna Vedantam∗,1 Ramprasaath R. Selvaraju1
Dhruv Batra2 Devi Parikh2
1Virginia Tech 2Georgia Institute of Technology1{prithv1,vrama91,ram21}@vt.edu 2{dbatra,parikh}@gatech.edu
Abstract
We are interested in counting the number of instances of
object classes in natural, everyday images. Previous count-
ing approaches tackle the problem in restricted domains
such as counting pedestrians in surveillance videos. Counts
can also be estimated from outputs of other vision tasks like
object detection. In this work, we build dedicated models
for counting designed to tackle the large variance in counts,
appearances, and scales of objects found in natural scenes.
Our approach is inspired by the phenomenon of subitizing
– the ability of humans to make quick assessments of counts
given a perceptual signal, for small count values. Given
a natural scene, we employ a divide and conquer strategy
while incorporating context across the scene to adapt the
subitizing idea to counting. Our approach offers consis-
tent improvements over numerous baseline approaches for
counting on the PASCAL VOC 2007 and COCO datasets.
Subsequently, we study how counting can be used to im-
prove object detection. We then show a proof of concept
application of our counting methods to the task of Visual
Question Answering, by studying the ‘how many?’ ques-
tions in the VQA and COCO-QA datasets.
1. Introduction
We study the scene understanding problem of counting
common objects in natural scenes. That is, given for ex-
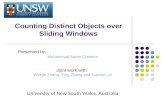
ample the image in Fig. 1, we want to count the number
of everyday object categories present in it: for example 4
chairs, 1 oven, 1 dining table, 1 potted plant and 3 spoons.
Such an ability to count seems innate in humans (and even
in some animals [10]). Thus, as a stepping stone towards
Artificial Intelligence (AI), it is desirable to have intelligent
machines that can count.
Similar to scene understanding tasks such as object de-
tection [43, 14, 18, 37, 17, 44, 34, 29] and segmenta-
tion [4, 30, 36] which require a fine-grained understanding
of the scene, object counting is a challenging problem that
∗ Denotes equal contribution.
Bottle : 3
Spoon : 3
Chair : 4
Potted Plant : 1
Dining Table : 1
Oven : 1
Figure 1: We study the problem of counting everyday objects in every-
day scenes. Given an everyday scene, we want to predict the number of
instances of common objects like bottle, chair etc.
requires us to reason about the number of instances of ob-
jects present while tackling scale and appearance variations.
Another closely related vision task is visual question
answering (VQA), where the task is to answer free form
natural language questions about an image. Interestingly,
questions related to the count of a particular object - How
many red cars do you see? form a significant portion of
the questions asked in common visual question answering
datasets [2, 35]. Moreover, we observe that end-to-end net-
works [2, 35, 31, 15] trained for this task do not perform
well on such counting questions. This is not surprising,
since the objective is often setup to minimize the cross-
entropy classification loss for the correct answer to a ques-
tion, which ignores ordinal structure inherent to counting.
In this work we systematically benchmark how well cur-
rent VQA models do at counting, and study any benefits
from dedicated models for counting on a subset of counting
questions in VQA datasets in Sec. 5.4.
Counts can also be used as complimentary signals to aid
other vision tasks like detection. If we had an estimate of
how many objects were present in the image, we could use
that information on a per-image basis to detect that many
objects. Indeed, we find that our object counting models
improve object detection performance.
We first describe some baseline approaches to counting
and subsequently build towards our proposed model.
11135

1
3
5
8
2
4
7
9
6
Glance Associative Subitizing (aso-sub)Detect
9 72
2
+2
2
+3
2
2
2
++ + ….
+ + ….
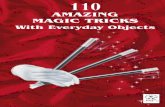
Figure 2: A toy example explaining the motivation for three categories
of counting approaches explored in this paper. The task is to count the
number of stars and circles. In detect, the idea is to detect instances of
a category, and then report the total number of instances detected as the
count. In glance, we make a judgment of count based on a glimpse of
the full image. In aso-sub, we divide the image into regions and judge
count based on patterns in local regions. Counts from different regions are
added through arithmetic.
Counting by Detection: It is easy to realize that perfect
detection of objects would imply a perfect count. While de-
tection is sufficient for counting, localizing objects is not
necessary. Imagine a scene containing a number of mugs
kept on a table where the objects occlude each other. In or-
der to count the number of mugs, we need not determine
with pixel-accurate segmentations or detections where they
are (which is hard in the presence of occlusions) as long
as say we can determine the number of handles. Relieving
the burden of detecting objects is also effective for count-
ing when objects occur at smaller scales where detection is
hard [18]. However, counting by detection or detect still
forms a natural approach for counting.
Counting by Glancing: Representations extracted from
Deep Convolutional Neural Networks [42, 26] trained on
image classification have been successfully applied to a
number of scene understanding tasks such as finegrained
recognition [12], scene classification [12], object detec-
tion [12], etc. We explore how well features from a deep
CNN perform at counting through instantiations of our
glancing (glance) models which estimate a global count
for the entire scene in a single forward pass. This can be
thought of as estimating the count at one shot or glance.
This is in contrast with detect, which sequentially incre-
ments its count with each detected object (Fig. 2). Note that
unlike detection, which optimizes for a localization objec-
tive, the glance models explicitly learn to count.
Counting by Subitizing: Subitizing is a widely stud-
ied phenomenon in developmental psychology [8, 25, 10]
which indicates that children have an ability to directly map
a perceptual signal to a numerical estimate, for a small num-
ber of objects (typically 1-4). Subitizing is crucial for de-
velopment and assists arithmetic and reasoning skills. An
example of subitizing is how we are able to figure out the
number of pips on a face of a die without having to count
them or how we are able to reason about tally marks.
Inspired by subitizing, we devise a new counting ap-
proach which adopts a divide and conquer strategy, using
the additive nature of counts. Note that glance can be
thought of as an attempt to subitize from a glance of the im-
age. However, as illustrated in Fig. 2 (center), subitizing is
difficult at high counts for humans.
Inspired by this, using the divide and conquer strat-
egy, we divide the image into non-overlapping cells (Fig. 2
right). We then subitize in each cell and use addition to get
the total count. We call this method associative subitizing
or aso-sub.
In practice, to implement this idea on real images, we in-
corporate context across the cells while sequentially subitiz-
ing in each one of them. We call this sequential subitiz-
ing or seq-sub. For each of these cells we curate real-
valued ground truth, which helps us deal with scale vari-
ations. Interestingly, we found that by incorporating con-
text seq-sub significantly outperforms the naive subitiz-
ing model aso-sub described above. (see Sec. 5.1 for
more details).
Counting by Ensembling: It is well known that when hu-
mans are given counting problems with large ground truth
counts (e.g. counting number of pebbles in a jar), individual
guesses have high variance, but an average across multi-
ple responses tends to be surprisingly close to the ground
truth. This phenomenon is popularly known as the wisdom
of the crowd [16]. Inspired by this, we create an ensemble
of counting methods (ens).
In summary, we evaluate several natural approaches to
counting, and propose a novel context and subitizing based
counting model. Then we investigate how counting can im-
prove detection. Finally, we study counting questions (‘how
many?’) in the Visual Question Answering (VQA) [2] and
COCO-QA [35] datasets and provide some comparisons
with the state-of-the-art VQA models.
2. Related Work
Counting problems in niche settings have been studied
extensively in computer vision [45, 41, 6, 27]. [6] explores
a Bayesian Poisson regression method on low-level features
for counting in crowds. [5] segments a surveillance video
into components of homogeneous motion and regresses to
counts in each region using Gaussian Process regression.
Since surveillance scenes tend to be constrained and highly
occluded, counting by detection is infeasible. Thus den-
sity based approaches are popular. Lempitsky and Zisser-
man [27] count people by estimating object density using
low-level features. They show applications on surveillance
and cell counting in biological images. Anchovi labs pro-
vided users interactive services to count specific objects
such as swimming pools in satellite images, cells in biolog-
ical images, etc. More recent work constructs CNN-based
models for crowd counting [45, 33] and penguin count-
ing [3] using lower level convolutional features from shal-
lower CNN models.
Counting problems in constrained settings have a funda-
1136

mentally different set of challenges to the counting problem
we study in this paper. In surveillance, for example, the
challenge is to estimate the counts accurately in the pres-
ence of large number of ground truth counts, where there
might be significant occlusions. In the counting problem on
everyday scenes, a larger challenge is the intra-class vari-
ance in everyday objects, and high sparsity (most images
will have 0 count for most object classes). Thus we need a
qualitatively different set of tools to solve this problem.
Other recent work [46] studies the problem of salient ob-
ject subitizing (SOS). This is the task of counting the num-
ber of salient objects in the image (independent of the cat-
egory). In contrast, we are interested in counting the num-
ber of instances of objects per category. Unlike Zhang et
al. [46], who use SOS to improve salient object detec-
tion, we propose to improve generic object detection using
counts. Our VQA experiments to diagnose counting perfor-
mance are also similar in spirit to recent work that studies
how well models perform on specific question categories
(counting, attribute comparison, etc.) [22] or on composi-
tional generalization [1].
3. Approach
Our task is to accurately count the number of instances
of different object classes in an image. For training, we use
datasets where we have access to object annotations such
as object bounding boxes and category wise counts. The
count predictions from the models are evaluated using the
metrics described in Sec. 4.2. The input to the glance,
aso-sub and seq-sub models are fc7 features from a
VGG-16 [42] CNN model. We experiment using both off-
the-shelf classification weights from ImageNet [38] and the
detection fine-tuned weights from our detect models.
3.1. Detection (detect)
We use the Fast R-CNN [18] object detector to count.
Detectors typically perform two post processing steps on a
set of preliminary boxes: non maximal suppression (NMS)
and score thresholding. NMS discards highly overlapping
and likely redundant detections (using a threshold to con-
trol the overlap), whereas the score threshold filters out all
detections with low scores.
We steer the detector to count better by varying these two
hyperparameters to find the setting where counting error is
the least. We pick these parameters using grid search on a
held-out val set. For each category, we first select a fixed
NMS threshold of 0.3 for all the classes and vary the score
threshold between 0 and 1. We then fix the score threshold
to the best value and vary the NMS threshold from 0 to 1.
3.2. Glancing (glance)
Our glance approach repurposes a generic CNN archi-
tecture for counting by training a multi-layered perceptron
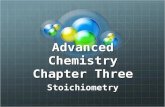
Figure 3: Canonical counting scale: Consider images with grids 2 × 2
(left) and 6 × 6 (right). Notice the red cells in both images: it is evident
that if the cell size is too large compared to the object (left), it is difficult
to estimate the large integer count of ‘sheep’ in the cell. However, if the
cell is too small (right), it might be hard to estimate the small fractional
count of ‘bus’ in the cell. Hence, we hypothesize that there exists a sweet
spot in discretization of the cells that would results in optimum counting
performance.
(MLP) with a L2 loss to regress to image level counts from
deep representations extracted from the CNN. The MLP has
batch normalization [20] and Rectified Linear Unit (ReLU)
activations between hidden layers. The models were trained
with a learning rate of 10−3 and weight decay set to 0.95.
We experiment with choices of a single hidden layer, and
two hidden layers for the MLP, as well as the sizes of the
hidden units. More details and ablation studies can be found
in [7].
3.3. Subitizing (aso-sub, seq-sub)
In our subitizing inspired methods, we divide our count-
ing problem into sub-problems on each cell in a non-
overlapping grid, and add the predicted counts across the
grid. In practice, since objects in real images occur at dif-
ferent scales, such cells might contain fractions of an object.
We adjust for this by allowing for real valued ground truth.
If a cell overlapping an object is very small compared to
the object, the small fractional count of the cell might be
hard to estimate. On the other hand, if a cell is too large
compared to objects present it might be hard to estimate
the large integer count of the cell (see Fig. 3). This trade-
off suggests that at some canonical resolution, we would be
able to count the smaller objects more easily by subitizing
them, as well as predict the partial counts for larger objects.
More concretely, we divide the image I , into a set of n non-
overlapping cells P = {p1, · · · , pn} such that I =⋃n
i=1 piand pi ∩ pj(i 6=j) = φ. Given such a partition P of the im-
age I and associated CNN features X = {xi, · · · , xn}, we
now explain our models based on this approach:
aso-sub : Our naive aso-sub model treats each cell
independently to regress to the real-valued ground truth.
We train on an augmented version of the dataset where the
dataset size is n-fold (n cells per image). Unlike glance,
where feature extracted on the full image is used to regress
to integer valued counts, aso-sub models regress to real-
1137

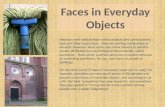
#person ~ 0
#person ~ 1
#person ~ 0.5
#person ~ 0.5
Figure 4: For both these images, the count of person is 1. Consider split-
ting this image into 2 × 1 cells (for illustration) for aso-sub. The bottom
half of the left image and top half of the right image both contains similar
visual signals – top-half of a person. However, the ground truth count on
the cell on the left is 1, and the one on the right is 0.5. An approach that es-
timates counts from individual cells out of context is bound to fail at these
cases. This motivates our proposed approach seq-sub.
valued counts on non-overlapping cells from features ex-
tracted per cell. Given class instance annotations as bound-
ing boxes b = {b1, · · · , bN} for a category k in an image
I , we compute the ground truth partial counts (ckgt) for the
grid-cells (pi) to be used for training as follows:
pi : ckgt =
N∑
j=1
pi ∩ bj
bj(1)
We compute the intersection of each box bi with the cell
pi and add up the intersections normalized by bi. Further,
given the cell-level count predictions cpi, the image level
count prediction is computed as c =∑n
i=1 max(0, cpi).
We use max to filter out negative predictions.
We experiment with dividing the image into equally
sized 3× 3, 5× 5, and 7× 7 grid-cells. The architecture of
the models trained on the augmented dataset are the same
as glance. For more details, refer to [7].
seq-sub : We motivate our proposed seq-sub (Sequen-
tial Subitizing) approach by identifying a potential flaw in
the naive aso-sub approach. Fig. 4 reveals the limitation
of the aso-sub model. If the cells are treated indepen-
dently, the naive aso-sub model will be unaware of the
partial presence of the concerned object in other cells. This
leads to situations where similar visual signals need to be
mapped to partial and whole presence of the object in the
cells (see Fig. 4). This is especially pathological since Hu-
ber or L-2 losses cannot capture this multi-modality in the
output space, since the implicit density associated with such
losses is either laplacian or gaussian.
Interestingly, a simple solution to mitigate this issue is
to model context, which resolves this ambiguity in counts.
That is, if we knew about the partial class presence in other
cells, we could use that information to predict the correct
cell count. Thus, although the independence assumption in
aso-sub is convenient, it ignores the fact that the aug-
mented dataset is not IID. While it is important to reason at
VGG (fc7)
500
4000
80
Context Aggregator (Bi-LSTM)
GT
Pred
Huber Loss
9
3
3 3
3
3
3
Feature Volume
Context Volume
fc layer (4096 x 500)
Count Volume
Concat Bi-LSTM Output States
80 #classes
500
3
3
fc layer (4000 x 80)
Figure 5: Architecture used for our seq-submodels. We extract a hidden
layer representation of the fc7 feature volume corresponding to the 3× 3
discretization of the image. Subsequently, we traverse this representation
volume in two particular sequences in parallel as shown via two stacked bi-
LSTMs per sequence and aggregate context over the image. We get output
states corresponding to each of the cells and subsequently get cell-counts
via another hidden layer. The hidden layers use ReLU as non-linearity.
a cell level, it is also necessary to be aware of the global im-
age context to produce meaningful predictions. In essence,
we propose seq-sub, that takes the best of both worlds
from glance and aso-sub.
The architecture of seq-sub is shown in Fig. 5. It consists
of a pair of 2 stacked bi-directional sequence-to-sequence
LSTMs [40]. We incorporate context across cells as
cpi= h(f1(x1, θ1), · · · , fn(xn, θn), i, θ) (2)
where individual fi(xi, θi) are hidden layer representations
of each cell feature with respective parameters and h(., θ)is the mechanism that captures context. This can be broken
down as follows. Let H be the set containing fi(xi, θi)s.
Let HO1 and HO2 be 2 ordered sets which are permutations
of H based on 2 particular sequence structures. The (traver-
sal) sequences, as we move across the grid in the feature col-
umn, is decided on the basis of nearness of cells (see Fig. 5).
We experiment with the sequence structures best described
for a 3 × 3 grid as Nand Z which correspond to HO1 and
HO2. Each of these feature sequences are then fed to a pair
of stacked Bi-LSTMs (Lj(., i, θl)) and the corresponding
cell output states are concatenated to obtain a context vec-
tor (vi) for each cell as vi = L1(HO1, i, θl)||L2(HO2, i, θl).The cell counts are then obatined as cpi
= g(vi, θg). The
composition of Lj(., i, θl) and g(., θg) implements h(., θ).We use a Huber Loss objective to regress to the count
values with a learning rate of 10−4 and weight decay set
to 0.95. For optimization, we use Adam [24] with a mini-
batch size of 64. The ground truth construction procedure
for training and the count aggregation procedure for evalu-
ation are as defined in aso-sub.
4. Experimental Setup
4.1. Datasets
We experiment with two datasets depicting everyday ob-
jects in everyday scenes: the PASCAL VOC 2007 [13] and
1138

COCO [28]. The PASCAL VOC dataset contains a train
set of 2501 images, val set of 2510 images and a test set
of 4952 images, and has 20 object categories. The COCO
dataset contains a train set of 82783 images and a val set
of 40, 504 images, with 80 object categories. On PASCAL,
we use the val set as our Count-val set and the test set as
our Count-test set. On COCO, we use the first half of val as
the Count-val set and the second half of val as the Count-
test set. The most frequent count per object category (as
one would expect in everyday scenes) is 0. Although, the
two datasets have a fair amount of count variability, there
is a clear bias towards lower count values. Note that this is
unlike the crowd-counting datasets, in particular [19] where
mean count is 1279.48 ± 960.42 and also unlike PASCAL
and COCO, the images have very little scale and appearance
variations in terms of objects.
4.2. Evaluation
We adopt the root mean squared error (RMSE) as our
metric. We also evaluate on a variant of RMSE that might
be better suited to human perception. The intuition behind
this metric is as follows. In a real world scenario, humans
tend to perceive counts in the logarithmic scale [11]. That
is, a mistake of 1 for a ground truth count of 2 might seem
egregious but the same mistake for a ground truth count of
25 might seem reasonable. Hence we scale each deviation
by a function of the ground truth count.
We first post-process the count predictions from each
method by thresholding counts at 0, and rounding predic-
tions to closest integers to get predictions cik. Given these
predictions and ground truth counts cik for a category k and
image i, we compute RMSE as follows:
RMSEk =
√
√
√
√
1
N
N∑
i=1
(cik − cik)2 (3)
and relative RMSE as:
relRMSEk =
√
√
√
√
1
N
N∑
i=1
(cik − cik)2
cik + 1(4)
where N is the number of images in the dataset. We then
average the error across all categories to report numbers on
the dataset (mRMSE and m-relRMSE).
We also evaluate the above metrics for ground truth in-
stances with non-zero counts. This reflects more clearly
how accurate the counts produced by a method (beyond pre-
dicting absence) are.
4.3. Methods and Baselines
We compare our approaches to the following baselines:
always-0: predict most-frequent ground truth count (0).
mean: predict the average ground truth count on the Count-
val set.
always-1: predict the most frequent non-zero value (1)
for all classes.
category-mean: predict the average count per category
on Count-val.
gt-class: treat the ground truth counts as classes and
predict the counts using a classification model trained with
cross-entropy loss.
We evaluate the following variants of counting ap-
proaches (see Sec. 3 for more details):
detect: We compare two methods for detect. The
first method finds the best NMS and score thresholds as ex-
plained in Sec. 3.1. The second method uses vanilla Fast
R-CNN as it comes out of the box, with the default NMS
and score thresholds.
glance: We explore the following choices of features:
(1) vanilla classification fc7 features noft, (2) detection
fine tuned fc7 features ft, (3) fc7 features from a CNN
trained to perform Salient Object Subitizing sos [46] and
(4) flattened conv-3 features from a CNN trained for clas-
sification
aso-sub, seq-sub: We examine three choices of grid
sizes (Sec. 3.3): 3× 3, 5× 5, and 7× 7 and noft and ft
features as above.
ens: We take the best performing subset of methods and
average their predictions to perform counting by ensem-
bling (ens).
5. Results
All the results presented in the paper are averaged on 10
random splits of the test set sampled with replacement.
5.1. Counting Results
PASCAL VOC 2007 : We first present results (Table. 1)
for the best performing variants (picked based on the val
set) of each method. We see that seq-sub outperforms
all other methods. Both glance and detect which per-
form equally well as per both the metrics, while glance
does slightly better on both metrics when evaluated on non-
zero ground truth counts. To put these numbers in perspec-
tive, we find that the difference of 0.01mRMSE-nonzero
between seq-sub and aso-sub leads to a difference of
0.19% mean F-measure performance in our counting to im-
prove detection application (Sec. 5.3). We also experiment
with conv3 features to regress to the counts, similar to
Zhang.et.al. [45]. We find that conv3 gets mRMSE of
0.63 which is much worse than fc7. We also tried PCA on
the conv3 features but that did not improve performance.
This indicates that our counting task is indeed more high
level and needs to reason about objects rather than low-
level textures. We also compare our approach with the SOS
model [46] by extracting fc7 features from a model trained
to perform category-independent salient object subitizing.
We observe that our best performing glance setup using
1139

Approach mRMSE mRMSE-nz m-relRMSE m-relRMSE-nz
always-0 0.66 ± 0.02 1.96 ± 0.03 0.28 ± 0.03 0.59 ± 0.00mean 0.65 ± 0.02 1.81 ± 0.03 0.31 ± 0.01 0.52 ± 0.00always-1 1.14 ± 0.01 0.96 ± 0.03 0.98 ± 0.00 0.17 ± 0.03category-mean 0.64 ± 0.02 1.60 ± 0.03 0.30 ± 0.00 0.45 ± 0.00gt-class 0.55 ± 0.02 2.12 ± 0.07 0.24 ± 0.00 0.88 ± 0.01detect 0.50 ± 0.01 1.92 ± 0.08 0.26 ± 0.01 0.85 ± 0.02
glance-noft-2L 0.50 ± 0.02 1.83 ± 0.09 0.27 ± 0.00 0.73 ± 0.00glance-sos-2L 0.51 ± 0.02 1.87 ± 0.08 0.29 ± 0.01 0.75 ± 0.02aso-sub-ft-1L-3 × 3 0.43 ± 0.01 1.65 ± 0.07 0.22 ± 0.01 0.68 ± 0.02seq-sub-ft-3 × 3 0.42 ± 0.01 1.65 ± 0.07 0.21 ± 0.01 0.68 ± 0.02ens 0.42 ± 0.17 1.68 ± 0.08 0.20 ± 0.00 0.65 ± 0.01
Table 1: Counting performance on PASCAL VOC 2007 Count-test Set
(L implies the number of hidden layers). Lower is better. ens is
a combination of glance-noft-2L, aso-sub-ft-1L-3 × 3 and
seq-sub-ft-3× 3.
Imagenet trained VGG-16 features outperforms the one us-
ing SOS features. This is also intuitive since SOS is a cat-
egory independent task, while we want to count number of
object instances of each category. Finally, we observe that
the performance increment from aso-sub to seq-sub is
not statistically significant. We hypothesize that this is be-
cause of the smaller size of the PASCAL dataset. Note that
we get more consistent improvements on COCO (Table. 2),
which is not only a larger dataset, but also contains scenes
that are contextually richer.1
COCO : We present results for the best performing variants
(picked based on the val set) of each method. The results
are summarized in Table. 2. We find that seq-sub does
the best on both mRMSE and m-relRMSE as well as
their non-zero variants by a significant margin. A compar-
ison indicates that the always-0 baseline does better on
COCO than on PASCAL. This is because COCO has many
more categories than PASCAL. Thus, the chances of any
particular object being present in an image decrease com-
pared to PASCAL. The performance jump from aso-sub
to seq-sub here is much more compared to PASCAL. Re-
cent work by Ren and Zemel [36] on Instance Segmentation
also reports counting performance on two COCO categories
- person and zebra.2
For both PASCAL and COCO we observe that while ens
outperforms other approaches in some cases, it does not al-
ways do so. We hypothesize that this is due to the poor
performance of glance. For detailed ablation studies on
ens see [7].
5.2. Analysis of the Predicted Counts
Count versus Count Error : We analyze the performance
of each of the methods at different count values on the
1When the Count-val split is considered, PASCAL has an average of
1.98 annotated objects per scene, unlike COCO which has 7.22 annotated
objects per scene.2We compare our best performing seq-sub model with their ap-
proach. On person, seq-sub outperforms by 1.29 RMSE and 0.24
relRMSE. On zebra, [36] outperforms seq-sub by a margin of 0.4
RMSE and 0.23 relRMSE. A recent exchange with the authors sug-
gested anomalies in their experimental setup, which may have resulted in
their reported numbers being optimistic estimates of the true performance.
Approach mRMSE mRMSE-nz m-relRMSE m-relRMSE-nz
always-0 0.54 ± 0.01 3.03 ± 0.03 0.21 ± 0.00 1.22 ± 0.01mean 0.54 ± 0.00 2.96 ± 0.03 0.23 ± 0.00 1.17 ± 0.01always-1 1.12 ± 0.00 2.39 ± 0.03 1.00 ± 0.00 0.80 ± 0.00category-mean 0.52 ± 0.01 2.97 ± 0.03 0.22 ± 0.00 1.18 ± 0.01gt-class 0.47 ± 0.00 2.70 ± 0.03 0.20 ± 0.00 1.08 ± 0.00detect 0.49 ± 0.00 2.78 ± 0.03 0.20 ± 0.00 1.13 ± 0.01
glance-ft-1L 0.42 ± 0.00 2.25 ± 0.02 0.23 ± 0.00 0.91 ± 0.00glance-sos-1L 0.44 ± 0.00 2.32 ± 0.03 0.24 ± 0.00 0.92 ± 0.01aso-sub-ft-1L-3 × 3 0.38 ± 0.00 2.08 ± 0.02 0.24 ± 0.00 0.87 ± 0.01seq-sub-ft-3 × 3 0.35 ± 0.00 1.96 ± 0.02 0.18 ± 0.00 0.82 ± 0.01ens 0.36± 0.00 1.98± 0.02 0.18± 0.00 0.81± 0.01
Table 2: Counting performance on COCO Count-test set (L implies the
number of hidden layers). Lower is better. ens is a combination of
glance-ft-1L, aso-sub-ft-1L-3× 3 and seq-sub-ft-3× 3.
Figure 6: We plot the mRMSE (across all categories) with error bars (too
small to be visible) at a count against the count (x-axis) on the Count-test
split of the COCO dataset. We find that the seq-sub-ft-3×3 and ens
perform really well at higher count values whereas at lower count values
the results of all the models are comparable except detect.
COCO Count-test set (Fig. 6). We pick each count value on
the x-axis and compute the RMSE over all the instances
at that count value. Interestingly, we find that the subitizing
approaches work really well across a range of count values.
This supports our intuition that aso-sub and seq-sub
are able to capture partial counts (from larger objects) as
well as integer counts (from smaller objects) better which is
intuitive since larger counts are likely to occur at a smaller
scale. Of the two approaches, seq-sub works better,
likely because reasoning about global context helps us cap-
ture part-like features better compared to aso-sub. This is
quite clear when we look at the performance of seq-sub
compared to aso-sub in the count range 11 to 15. For
lower count values, ens does the best (Fig. 6). We can see
that for counts > 5, glance and detect performances
start tailing off.
Detection : We tune the hyperparameters of Fast R-CNN
in order to find the setting where the mean squared error is
the lowest, on the Count-val splits of the datasets. We show
some qualitative examples of the detection ground truth, the
performance without tuning for counting (using black-box
Fast R-CNN), and the performance after tuning for counting
1140

FixedThreshold (0.8)Count : 1
FixedThreshold (0.8) Count : 1
CountingThreshold Count : 17
CountingThreshold Count : 4
24 Bottles 11 Persons
Figure 7: We show the ground truth count (top), outputs of detect with
a default score threshold of 0.8 (row 1), and outputs of detect with hy-
perparameters tuned for counting (row 2). Clearly, choosing a different
threshold allows us to trade-off localization accuracy for counting accu-
racy (see bottle image). The method finds partial evidence for counts, even
if it cannot localize the full object.
Figure 8: We plot the mRMSE across all categories (y-axis) for
aso-sub and seq-sub on PASCAL Count-val set against the size of
subitizing grid cells (x-axis). As we vary the discretization we conceptually
explore a continuum between glance and detect approaches. We find
that for aso-sub there exists a sweet spot (3×3), where performance on
counting is the best. Interestingly, for seq-sub the discretization sweet-
spot is farther out to the right than aso-sub’s 3× 3.
on the PASCAL dataset in Fig. 7. We use untuned Fast
R-CNN at a score threshold of 0.8 and NMS threshold of
0.3, as used by Girshick et al. [18] in their demo. At this
configuration, it achieves an mRMSE of 0.52 on Count-
test split of COCO. We find that we achieve a gain of 0.02
mRMSE by tuning the hyperparameters for detect.
Subitizing : We next analyze how different design choices
in aso-sub affect performance on PASCAL. We pick the
best performing aso-sub-ft-1L-3× 3 model and vary
the grid sizes (as explained in Sec. 4). We experiment with
3 × 3, 5 × 5, and 7 × 7 grid sizes. We observe that for
aso-sub the performance of 3 × 3 grid is the best and
performance deteriorates significantly as we reach 7 × 7grids (Fig. 8).3 This indicates that there is indeed a sweet
spot in the discretization as we interpolate between the
3Going from 1×1 to 3×3, one might argue that the gain in performance
in aso-sub is due to more (augmented) training data. However, from the
diminishing performance on increasing grid size to 5× 5 (which has even
more data to train from), we hypothesize that this is not the case.
glance and detect settings. However, we notice that
for seq-sub this sweet spot lies farther out to the right.
5.3. Counting to Improve Detection
We now explore whether counting can help improve de-
tection performance (on the PASCAL dataset). Detectors
are typically evaluated via the Average Precision (AP) met-
ric, which involves a full sweep over the range of score-
thresholds for the detector. While this is a useful investiga-
tive tool, in any real application (say autonomous driving),
the detector must make hard decisions at some fixed thresh-
old. This threshold could be chosen on a per-image or per-
category basis. Interestingly, if we knew how many objects
of a category are present, we could simply set the threshold
so that those many objects are detected similar to Zhang et
al. [46]. Thus, we could use per-image-per-category counts
as a prior to improve detection.
Note that since our goal is to intelligently pick a thresh-
old for the detector, computing AP (which involves a sweep
over the thresholds) is not possible. Hence, to quantify de-
tection performance, we first assign to each detected box
one ground truth box with which it has the highest overlap.
Then for each ground truth box, we check if any detection
box has greater than 0.5 overlap. If so, we assign a match
between the ground truth and detection, and take them out
of the pool of detections and ground truths. Through this
procedure, we obtain a set of true positive and false positive
detection outputs. With these outputs we compute the preci-
sion and recall values for the detector. Finally, we compute
the F-measure as the harmonic mean of these precision and
recall values, and average the F-measure values across im-
ages and categories. We call this the mF (mean F-measure)
metric. As a baseline, we use the Fast-RCNN detector after
NMS to do a sweep over the thresholds for each category
on the validation set to find the threshold that maximizes F-
measure for that category. We call this the base detector.
With a fixed per-category score threshold, the base de-
tector gets a performance of 15.26% mF. With ground truth
counts to select thresholds, we get a best-case oracle per-
formance of 20.17%. Finally, we pick the outputs of ens
and seq-sub-ft models and use the counts from each of
these to set separate thresholds. Our counting methods un-
dercount more often than they overcount4, a high count im-
plies that the ground truth count is likely to be even higher.
Thus, for counts of 0, we default to the base thresholds and
for the other predicted counts, we use the counts to set the
thresholds. With this procedure, we get a gains of 1.64%
mF and 1.74% mF over the base performance using ens
and seq-sub-ft predictions respectively. Thus, count-
ing can be used as a complimentary signal to aid detector
performance, by intelligently picking the detector threshold
in an image specific manner.
4See [7] for more details.
1141

How many athletes are there on the field? Resolved COCO category
person VQA : 5 COCO : 5 detect : 5 glance : 5 aso-sub : 5 seq-sub : 5
ens : 5
How many surfboards are shown? Resolved COCO category surfboard VQA : 5 COCO : 5detect : 1 glance : 2aso-sub : 3 seq-sub : 4 ens : 3
How many glasses are filled with alcohol? Resolved COCO category wine glass VQA : 10 COCO : 10 detect : 5 glance : 7 aso-sub : 8 seq-sub : 9 ens : 7
Figure 9: Some examples from the Count-QA VQA subset. Given a ques-
tion, we parse the nouns and resolve correspondence to COCO categories.
The resolved ground truth category is denoted after the question. We show
the VQA ground truth and COCO dataset resolved ground truth counts,
followed by outputs from detect, glance, aso-sub, seq-sub and
ens.
Approach mRMSE (VQA) mRMSE (COCO-QA)
detect 2.72 ± 0.09 2.59 ± 0.12
glance-ft-1L 2.19 ± 0.05 1.86 ± 0.12
aso-sub-ft-1L-3× 3 1.94 ± 0.07 1.47 ± 0.04
seq-sub-ft-3× 3 1.81 ± 0.09 1.34 ± 0.07
ens 1.80 ± 0.07 1.40 ± 0.08
Deeper LSTM [21] 2.71 ± 0.23 N/A
SOTA VQA [15] 3.25 ± 0.94 N/A
Table 3: Performance of various methods on counting questions in the
Count-QA splits of the VQA dataset and COCO-QA datasets respec-
tively (L implies the number of hidden layers). Lower is better. ens
is a combination of glance-ft-1L, aso-sub-ft-1L-3 × 3 and
seq-sub-ft-3× 3.
5.4. VQA Experiment
We explore how well our counting approaches do on
simple counting questions. Recent work [2, 35, 31, 15] has
explored the problem of answering free-form natural lan-
guage questions for images. One of the large-scale datasets
in the space is the Visual Question Answering [2] dataset.
We also evaluate using the COCO-QA dataset from [35]
which automatically generates questions from human cap-
tions. Around 10.28% and 7.07% of the questions in VQA
and COCO-QA are “how many” questions related to count-
ing objects. Note that both the datasets use images from the
COCO [28] dataset. We apply our counting models, along
with some basic natural language pre-processing to answer
some of these questions.
Given the question “how many bottles are there in the
fridge?” we need to reason about the object of interest (bot-
tles), understand referring expressions (in the fridge) etc.
Note that since these questions are free form, the category
of interest might not exactly correspond to an COCO cate-
gory. We tackle this ambiguity by using word2vec embed-
dings [32]. Given a free form natural language question, we
extract the noun from the question and compute the clos-
est COCO category by checking similarity of the noun with
the categories in the word2vec embedding space. In case of
multiple nouns, we just retain the first noun in the sentence
(since how many questions typically have the subject noun
first). We then run the counting method for the COCO cat-
egory (see Fig 9). More details can be found in the supple-
mentary. Note that parsing referring expressions is still an
open research problem [23, 39]. Thus, we filter questions
based on an “oracle” for resolving referring expressions.
This oracle is constructed by checking if the ground truth
count of the COCO category we resolve using word2vec
matches with the answer for the question. Evaluating only
on these questions allows us to isolate errors due to inac-
curate counts. We evaluate our outputs using the RMSE
metric. We use this procedure to compile a list of 1774 and
513 questions (Count-QA) from the VQA and COCO-QA
datasets respectively, to evaluate on. We will publicly re-
lease our Count-QA subsets to help future work.
We report performances in Table. 3. The trend of in-
creasing performance is visible from glance to ens.
We find that seq-sub significantly outperforms the other
approaches. We also evaluate a state-of-the-art VQA
model [15] on the Count-QA VQA subset and find that even
glance does better by a substantial margin.5
6. Conclusion
We study the problem of counting everyday objects in
everyday scenes. We evaluate some baseline approaches to
this problem using object detection, regression using global
image features, and associative subitizing which involves
regression on non-overlapping image cells. We propose
sequential subtizing, a variant of the associative subitizing
model which incorporates context across cells using a pair
of stacked bi-directional LSTMs. We find that our proposed
models lead to improved performance on PASCAL VOC
2007 and COCO datasets. We thoroughly evaluate the rel-
ative strengths, weaknesses and biases of our approaches,
providing a benchmark for future approaches on counting,
and show that an ensemble of our proposed approaches pe-
forms the best. Further, we show that counting can be used
to improve object detection and present proof-of-concept
experiments on answering ‘how many?’ questions in vi-
sual question answering tasks. Our code and datasets will
be made publicly available.Acknowledgements. We are grateful to the developers of Torch [9] for
building an excellent framework. This work was funded in part by NSF
CAREER awards to DB and DP, ONR YIP awards to DP and DB, ONR
Grant N00014-14-1-0679 to DB, a Sloan Fellowship to DP, ARO YIP
awards to DB and DP, an Allen Distinguished Investigator award to DP
from the Paul G. Allen Family Foundation, Google Faculty Research
Awards to DP and DB, Amazon Academic Research Awards to DP and
DB, and NVIDIA GPU donations to DB. The views and conclusions con-
tained herein are those of the authors and should not be interpreted as nec-
essarily representing the official policies or endorsements, either expressed
or implied, of the U.S. Government, or any sponsor.
5For the column corresponding to VQA, all methods are evaluated on
the subset of the predictions where [21] and [15] both produced numerical
answers. For [21], there were 11 non-numerical answers and for [15] there
were 3 (e.g., ”many”, ”few”, ”lot”)
1142

References
[1] A. Agrawal, D. Batra, and D. Parikh. Analyzing the
behavior of visual question answering models. CoRR,
abs/1606.07356, 2016. 3
[2] S. Antol, A. Agrawal, J. Lu, M. Mitchell, D. Batra, C. L.
Zitnick, and D. Parikh. VQA: visual question answering.
In 2015 IEEE International Conference on Computer Vision,
ICCV 2015, Santiago, Chile, December 7-13, 2015, pages
2425–2433, 2015. 1, 2, 8
[3] C. Arteta, V. Lempitsky, and A. Zisserman. Counting in the
wild. In European Conference on Computer Vision, 2016. 2
[4] J. Carreira, R. Caseiro, J. Batista, and C. Sminchisescu. Se-
mantic segmentation with second-order pooling. In Lec-
ture Notes in Computer Science (including subseries Lecture
Notes in Artificial Intelligence and Lecture Notes in Bioin-
formatics), volume 7578 LNCS, pages 430–443, 2012. 1
[5] A. B. Chan and N. Vasconcelos. Privacy preserving crowd
monitoring: Counting people without people models or
tracking. In 2008 IEEE Conference on Computer Vision and
Pattern Recognition, pages 1–7. IEEE, 6 2008. 2
[6] A. B. Chan and N. Vasconcelos. Bayesian poisson regression
for crowd counting. In 2009 IEEE 12th International Con-
ference on Computer Vision, pages 545–551. IEEE, 9 2009.
2
[7] P. Chattopadhyay, R. Vedantam, R. S. Ramprasaath, D. Ba-
tra, and D. Parikh. Counting everyday objects in everyday
scenes. CoRR, abs/1604.03505, 2016. 3, 4, 6, 7
[8] D. H. Clements. Subitizing: What is it? why teach it? Teach-
ing children mathematics, 5(7):400, 1999. 2
[9] R. Collobert, K. Kavukcuoglu, and C. Farabet. Torch7: A
matlab-like environment for machine learning. In BigLearn,
NIPS Workshop, 2011. 8
[10] S. Cutini and M. Bonato. Subitizing and visual short-
term memory in human and non-human species: a common
shared system? Frontiers in Psychology, 3, 2012. 1, 2
[11] S. Dehaene, V. Izard, E. Spelke, and P. Pica. Log or linear?
distinct intuitions of the number scale in western and ama-
zonian indigene cultures. Science, 320(5880):1217–1220,
2008. 5
[12] J. Donahue, Y. Jia, O. Vinyals, J. Hoffman, N. Zhang,
E. Tzeng, and T. Darrell. Decaf: A deep convolutional acti-
vation feature for generic visual recognition. 10 2013. 2
[13] M. Everingham, S. M. A. Eslami, L. Van Gool, C. K. I.
Williams, J. Winn, and A. Zisserman. The pascal visual ob-
ject classes challenge: A retrospective. International Journal
of Computer Vision, 111(1):98–136, Jan. 2015. 4
[14] P. Felzenszwalb, D. McAllester, and D. Ramanan. A dis-
criminatively trained, multiscale, deformable part model.
In 26th IEEE Conference on Computer Vision and Pattern
Recognition, CVPR, 2008. 1
[15] A. Fukui, D. H. Park, D. Yang, A. Rohrbach, T. Darrell, and
M. Rohrbach. Multimodal compact bilinear pooling for vi-
sual question answering and visual grounding. In Proceed-
ings of the 2016 Conference on Empirical Methods in Natu-
ral Language Processing, EMNLP 2016, Austin, Texas, USA,
November 1-4, 2016, pages 457–468, 2016. 1, 8
[16] F. Galton. One Vote, One Value. 75:414, Feb. 1907. 2
[17] S. Gidaris and N. Komodakis. Object detection via a multi-
region and semantic segmentation-aware cnn model. In Pro-
ceedings of the IEEE International Conference on Computer
Vision, pages 1134–1142, 2015. 1
[18] R. Girshick. Fast r-cnn. In International Conference on Com-
puter Vision (ICCV), 2015. 1, 2, 3, 7
[19] H. Idrees, I. Saleemi, C. Seibert, and M. Shah. Multi-source
multi-scale counting in extremely dense crowd images. In
Proceedings of the 2013 IEEE Conference on Computer Vi-
sion and Pattern Recognition, CVPR ’13, pages 2547–2554,
Washington, DC, USA, 2013. IEEE Computer Society. 5
[20] S. Ioffe and C. Szegedy. Batch normalization: Accelerating
deep network training by reducing internal covariate shift. In
Proceedings of The 32nd International Conference on Ma-
chine Learning, pages 448–456, 2015. 3
[21] D. B. Jiasen Lu, Xiao Lin and D. Parikh. Deeper
lstm and normalized cnn visual question answering
model. https://github.com/VT-vision-lab/
VQA_LSTM_CNN, 2015. 8
[22] J. Johnson, B. Hariharan, L. van der Maaten, L. Fei-Fei, C. L.
Zitnick, and R. Girshick. CLEVR: A diagnostic dataset for
compositional language and elementary visual reasoning. In
CVPR, 2017. 3
[23] S. Kazemzadeh, V. Ordonez, M. Matten, and T. L. Berg.
Referit game: Referring to objects in photographs of natu-
ral scenes. In EMNLP, 2014. 8
[24] D. P. Kingma and J. Ba. Adam: A method for stochastic
optimization. CoRR, abs/1412.6980, 2014. 4
[25] A. Klein and P. Starkey. Universals in the development of
early arithmetic cognition. New Directions for Child and
Adolescent Development, 1988(41):5–26, 1988. 2
[26] A. Krizhevsky, I. Sutskever, and G. E. Hinton. Imagenet
classification with deep convolutional neural networks. In
Advances in Neural Information Processing Systems, pages
1097–1105, 2012. 2
[27] V. Lempitsky and A. Zisserman. Learning To Count Objects
in Images. In Advances in Neural Information Processing
Systems, pages 1324–1332, 2010. 2
[28] T. Lin, M. Maire, S. Belongie, J. Hays, P. Perona, D. Ra-
manan, P. Dollar, and C. L. Zitnick. Microsoft COCO: Com-
mon objects in context. In ECCV, 2014. 5, 8
[29] W. Liu, D. Anguelov, D. Erhan, C. Szegedy, and S. E. Reed.
SSD: single shot multibox detector. CoRR, abs/1512.02325,
2015. 1
[30] J. Long, E. Shelhamer, and T. Darrell. Fully convolutional
networks for semantic segmentation. In Proceedings of the
IEEE Conference on Computer Vision and Pattern Recogni-
tion, pages 3431–3440, 2015. 1
[31] M. Malinowski, M. Rohrbach, and M. Fritz. Ask your neu-
rons: A neural-based approach to answering questions about
images. In Proceedings of the IEEE International Confer-
ence on Computer Vision, pages 1–9, 2015. 1, 8
[32] T. Mikolov, I. Sutskever, K. Chen, G. S. Corrado, and
J. Dean. Distributed Representations of Words and Phrases
and their Compositionality. In Advances in Neural Informa-
tion Processing Systems, pages 3111–3119, 2013. 8
1143

[33] D. Onoro Rubio and R. J. Lopez-Sastre. Towards
perspective-free object counting with deep learning. In
ECCV, 2016. 2
[34] J. Redmon, S. Divvala, R. Girshick, and A. Farhadi. You
only look once: Unified, real-time object detection. In The
IEEE Conference on Computer Vision and Pattern Recogni-
tion (CVPR), June 2016. 1
[35] M. Ren, R. Kiros, and R. Zemel. Exploring models and data
for image question answering. In Advances in Neural Infor-
mation Processing Systems, pages 2953–2961, 2015. 1, 2,
8
[36] M. Ren and R. S. Zemel. End-to-end instance seg-
mentation and counting with recurrent attention. CoRR,
abs/1605.09410, 2016. 1, 6
[37] S. Ren, K. He, R. Girshick, and J. Sun. Faster r-cnn: Towards
real-time object detection with region proposal networks. In
C. Cortes, N. D. Lawrence, D. D. Lee, M. Sugiyama, and
R. Garnett, editors, Advances in Neural Information Process-
ing Systems 28, pages 91–99. Curran Associates, Inc., 2015.
1
[38] O. Russakovsky, J. Deng, H. Su, J. Krause, S. Satheesh,
S. Ma, Z. Huang, A. Karpathy, A. Khosla, M. Bernstein,
A. C. Berg, and L. Fei-Fei. ImageNet Large Scale Visual
Recognition Challenge. International Journal of Computer
Vision (IJCV), 115(3):211–252, 2015. 3
[39] A. Sadovnik, A. C. Gallagher, and T. Chen. It’s not polite to
point: Describing people with uncertain attributes. In CVPR,
pages 3089–3096. IEEE, 2013. 8
[40] M. Schuster and K. K. Paliwal. Bidirectional recurrent neural
networks. IEEE Trans. Signal Processing, 45:2673–2681,
1997. 4
[41] S. Seguı, O. Pujol, and J. Vitria. Learning to count with deep
object features. may 2015. 2
[42] K. Simonyan and A. Zisserman. Very deep convolutional
networks for large-scale image recognition. 9 2014. 2, 3
[43] P. Viola and M. Jones. Rapid object detection using a boosted
cascade of simple features. Computer Vision and Pattern
Recognition (CVPR), 1:I—-511—-I—-518, 2001. 1
[44] L. Wan, D. Eigen, and R. Fergus. End-to-end integration
of a convolution network, deformable parts model and non-
maximum suppression. In Proceedings of the IEEE Con-
ference on Computer Vision and Pattern Recognition, pages
851–859, 2015. 1
[45] C. Zhang, H. Li, X. Wang, and X. Yang. Cross-Scene Crowd
Counting via Deep Convolutional Neural Networks. In Pro-
ceedings of the IEEE Conference on Computer Vision and
Pattern Recognition, pages 833–841, 2015. 2, 5
[46] J. Zhang, S. Ma, M. Sameki, S. Sclaroff, M. Betke, Z. Lin,
X. Shen, B. Price, and R. Mech. Salient object subitizing. In
IEEE Conference on Computer Vision and Pattern Recogni-
tion (CVPR), 2015. 3, 5, 7
1144