Cooperative sUAV Collision Avoidance Based on Satisficing...
9
International Journal of Aeronautical and Space Sciences https://doi.org/10.1007/s42405-019-00183-4 ORIGINAL PAPER Cooperative sUAV Collision Avoidance Based on Satisficing Theory Namwoo Kim 1 · Yoonjin Yoon 1 Received: 9 September 2018 / Revised: 22 March 2019 / Accepted: 3 June 2019 © The Korean Society for Aeronautical & Space Sciences 2019 Abstract The recent growth in small unmanned aerial vehicle (sUAV) applications in public and private sectors has generated a greater interest in effective collision avoidance strategies. This paper presents a cooperative collision avoidance approach for sUAV in the low-altitude uncontrolled airspace based on satisficing game theory. By incorporating both the self and cooperative preferences in making individual heading decision, satisficing framework provides a collision avoidance strategy that increases throughput while decreasing unnecessary collisions. A total of 4356 chokepoint scenarios are simulated with varying satisficing parameters, including number of sUAV agents, minimum separation, action angle, and dual utility parameters of raw preference and negotiation index. Simulation-based sensitivity analysis is conducted to find the combined effect of such parameters. The results show that performance of satisficing framework is dependent on traffic density primarily. Except for the very light traffic scenario, the minimum separation and degree of action angle affected the system efficiency the most, while dual utility parameters played crucial roles in highly conflicted scenarios. In conclusion, sUAV traffic and collision rules require an adaptive approach in regard to the traffic density, and satisficing framework can provide an effective collision avoidance strategy in a medium- to high-density traffic environment. Keywords Small unmanned aerial vehicles (sUAV) · Collision avoidance · Satisficing theory · UAS traffic management Nomenclature U {u i : i 1, 2 ... , N } Set of N sUAV agents K Detection range R s Minimum separation O i Origin of u i D i Destination of u i Θ θ : θ o , θ + , θ − Set of action angle, θ o : keep current heading, θ + : turn right by θ , θ − : turn left by θ d ∗ i , j Distance between agents u i and u j at their closest approach d i , j Distance between agents u i and u j B Yoonjin Yoon [email protected] Namwoo Kim [email protected] 1 Department of Civil and Environmental Engineering, Korea Advanced Institute of Science and Technology, Daejeon 34141, South Korea C i {u j : u j ∈ U , u j u i , d i , j ≤ K , d ∗ i , j ≤ R s } Collision set of u i p(u i ) Priority of u i γ Raw preference q Negotiation index 1 Introduction The rapid adoption of small unmanned aerial vehicles (sUAVs) both in the private and public sectors has garnered strong interest in developing robust traffic control and flow management methodologies to operate sUAVs in the low- altitude airspace [1]. There exist well-established air traffic management (ATM) and air traffic control (ATC) techniques and policies for collision avoidance of manned aircraft in controlled airspace. Tomlin et al. proposed a conflict reso- lution method through a multi-agent hybrid system based on control theory and game theoretic utility to ensure safe separation between two or three aircrafts [2]. Eby et al. proposed a potential field method for two aircrafts to main- tain a separation from each other using electrical repulsion once a potential loss of separation is detected [3, 4]. Pal- lottino et al. proposed a mixed integer linear optimization 123
Transcript of Cooperative sUAV Collision Avoidance Based on Satisficing...

International Journal of Aeronautical and Space Scienceshttps://doi.org/10.1007/s42405-019-00183-4
ORIG INAL PAPER
Cooperative sUAV Collision Avoidance Based on Satisficing Theory
Namwoo Kim1 · Yoonjin Yoon1
Received: 9 September 2018 / Revised: 22 March 2019 / Accepted: 3 June 2019© The Korean Society for Aeronautical & Space Sciences 2019
AbstractThe recent growth in small unmanned aerial vehicle (sUAV) applications in public and private sectors has generated a greaterinterest in effective collision avoidance strategies. This paper presents a cooperative collision avoidance approach for sUAVin the low-altitude uncontrolled airspace based on satisficing game theory. By incorporating both the self and cooperativepreferences inmaking individual heading decision, satisficing framework provides a collision avoidance strategy that increasesthroughputwhile decreasing unnecessary collisions.A total of 4356 chokepoint scenarios are simulatedwith varying satisficingparameters, including number of sUAVagents,minimumseparation, action angle, and dual utility parameters of rawpreferenceand negotiation index. Simulation-based sensitivity analysis is conducted to find the combined effect of such parameters. Theresults show that performance of satisficing framework is dependent on traffic density primarily. Except for the very lighttraffic scenario, the minimum separation and degree of action angle affected the system efficiency the most, while dualutility parameters played crucial roles in highly conflicted scenarios. In conclusion, sUAV traffic and collision rules requirean adaptive approach in regard to the traffic density, and satisficing framework can provide an effective collision avoidancestrategy in a medium- to high-density traffic environment.
Keywords Small unmanned aerial vehicles (sUAV) · Collision avoidance · Satisficing theory · UAS traffic management
Nomenclature
U � {ui : i � 1, 2 . . . , N } Set of N sUAV agentsK Detection rangeRs Minimum separationOi Origin of uiDi Destination of uiΘ � {
θ : θo, θ+, θ−}Set of action angle, θo :keep current heading, θ+:turn right by θ , θ− : turn leftby θ
d∗i , j Distance between agents ui
and u j at their closestapproach
di , j Distance between agents uiand u j
B Yoonjin [email protected]
Namwoo [email protected]
1 Department of Civil and Environmental Engineering, KoreaAdvanced Institute of Science and Technology,Daejeon 34141, South Korea
Ci � {u j : u j ∈ U , u j �� ui ,di , j ≤ K , d∗
i , j ≤ Rs}Collision set of ui
p(ui ) Priority of uiγ Raw preferenceq Negotiation index
1 Introduction
The rapid adoption of small unmanned aerial vehicles(sUAVs) both in the private and public sectors has garneredstrong interest in developing robust traffic control and flowmanagement methodologies to operate sUAVs in the low-altitude airspace [1]. There exist well-established air trafficmanagement (ATM) and air traffic control (ATC) techniquesand policies for collision avoidance of manned aircraft incontrolled airspace. Tomlin et al. proposed a conflict reso-lution method through a multi-agent hybrid system basedon control theory and game theoretic utility to ensure safeseparation between two or three aircrafts [2]. Eby et al.proposed a potential field method for two aircrafts to main-tain a separation from each other using electrical repulsiononce a potential loss of separation is detected [3, 4]. Pal-lottino et al. proposed a mixed integer linear optimization
123

International Journal of Aeronautical and Space Sciences
model for collision avoidance [5]. Tang et al. formalized air-craft encounter model, which considers a colored Pertri netand surrounding traffic to improve traffic alert and collisionavoidance system (TCAS) capability [6]. Ruiz et al. formu-lated a causal model for conflict-free 4D trajectories basedon flight routing allocation [7]. The casual model materi-als and methods assign a conflict-free 4D trajectory to eachagent to resolve potential conflict at the local level. Qian et al.proposed pure-strategy game-based 4D trajectories planning,where a conflict-free trajectory and equilibrium are achievedbased on maximum improvement-distributed algorithm [8].Although the variousATMmethodologies and techniques arewell established and continuously being researched, imme-diate application of ATM or ATC rules to sUAV traffic needscareful consideration due to characteristics in control meth-ods, maneuverability, risks, and operational constraints thatare unique to sUAV [9].
In regard toUAVcollision avoidancemethodologies, vari-ous approaches have been explored and researched. Carboneet al. proposed geometric approaches for UAV conflict res-olution, where an agent makes the maneuvering decisionbased on the geometric measures, such as the point of clos-est approach and a collision cone, and the velocity vectors oftwo moving agents in potential conflict [10]. In the artificialpotential field approaches, each agent and its destination aretreated as a charged particle. Repulsive and attractive forcecontrols the separation between agents and determineswherethe UAV should travel [11]. Sun et al. improved existingpotential field method to solve target unreachable problemand narrow channel problem [12]. Temizer et al. and Baiet al. assumed a partially observableMarkov decision processto model not only the conflict resolution but also uncertaintyregarding sensing andflight dynamics [13, 14].Richards et al.proposed collision avoidance based on mixed integer linearprogramming by modeling each agent as a point mass mov-ing at a constant speed and imposed a set of assumptionsto transform aircraft dynamics into a linear function [15].Cui et al. proposed reactive path planning for autonomousagents based on 3D Dubins curves and artificial potentialfield method [16].
In regard to cooperative collision avoidance problem,Johnson et al., Hill et al. and Archibald et al. addressed theproblemof collision avoidance amongmultiple aircraft basedon satisficing theory [17–19, 24–26]. Stirling et al. proposedsatisficing concept for the purpose of solving multi-agentdecision problem by incorporating group interest in addi-tion to personal goals [20, 21]. The levels of self-targetingand self-sacrifice aremeasured by dual utilities. Dual utilitiesconsist of rejectability and selectability, which represent costand benefit of a particular option. In other words, rejectabil-ity represents the degree of resource consumption, whileselectability represents the degree of success support. Bothutility functions conform to the axioms of probability.A deci-
sion is made cooperatively where each agent seeks to find anoption that benefit surpasses cost. Instead of maximizing thenet benefit, the theory seeks the option that balances the dualutilities based on negotiation index.
In this paper, the satisficing theory framework is stud-ied and applied to solve a cooperative collision avoidanceproblem of multiple sUAVs. For application to sUAV, weassume that sUAV flies a shorter range at a much lowerspeed with maneuverability characteristics that are distinctfrom the larger jet aircraft. A sUAV may choose the directnominal route between the origin and destination unless thepossible collision is detected. In case of collision detection,each sUAV agent makes the satisficing directional adjust-ment based on dual utilities—selectability and rejectabili-ty—which are determined in cooperation with other agentsin the neighborhood. A chokepoint simulation is designed toevaluate the efficiency and loss of separation (failure rate) ofthe proposed framework. In the chokepoint simulation, theaction angle is modeled as a decision parameter to incorpo-rate diverse maneuvering characteristics of sUAV, unlike theprevious studies [17–19, 24–26]. Based on numerical analy-sis, the combined effect of various satisficing parameters isassessed in regard to system efficiency and failure rate.
2 Methods
2.1 Background
Simon first conceptualized the satisficing decision, wherethe satisficing option is achieved when an option meets orexceeds the threshold called aspiration level [22]. Stirlingand Goodrich further extended Simon’s satisficing conceptfor the purpose of solving multi-agent decision problem byincorporating group interest in addition to personal goals [20,21]. By controlling the degree of self-sacrifice, the theoryseeks a good enough (or satisficing) option rather than thebest (or optimal) option, which is particularly useful when itis not feasible to produce the optimal decisions. The levelsof self-targeting and self-sacrifice are measured by dual util-ities. Dual utilities consist of rejectability and selectability,which represent cost and benefit of a particular option [23].In other words, rejectability represents the degree of resourceconsumption,while selectability represents the degree of suc-cess support. Both utility functions conform to the axiomsof probability. Each agent seeks an option that benefit sur-passes cost to achieve cooperative decision-making. Insteadof maximizing the net benefit, the theory seeks the optionthat balances the dual utilities based on negotiation index.
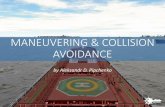
In Fig. 1, a block diagram of conflict resolution using sat-isficing theory is shown. First, a deciding agent identifiesneighboring agents within the detection range K. All neigh-bors including the deciding agent are assigned with a unique
123

International Journal of Aeronautical and Space Sciences
Fig. 1 Block diagram of satisficing theory-based conflict resolution algorithm
Table 1 Difference between twomodels Our work Archibald et al. [19]
Agent category SUAVs Larger jet aircraft
v (cruise speed) 20 m/s 223.52 m/s
Θ (action set) Current heading, turn left/right Current heading, moderateleft/right turn, sharpleft/right turn
θ (action angle) {15°, 45°, 90°} 2.5◦(moderate), 5◦(sharp)K (detection range) 1500 m 926,000 m
Rs (minimum separation) {50, 100, 200, 500} m 92,600 m
γ (raw preference) {0, 0.001, 0.01, 0.1, 0.25, 0.5, 0.75,0.9, 0.99, 0.999, 1}
0.001
q (negotiation index) {0, 0.001, 0.01, 0.1, 0.25, 0.5, 0.75,0.9, 0.99, 0.999, 1}
1
rank considering two factors—proximity to the destinationand the total incurred delay. Thosewith a higher rank than thedeciding agent are grouped into the priority set. Dual utilitiesare then calculated, where rejectability measures the likeli-hood of potential collision with the priority group by stayingon the current route, and selectability measures the degree ofdivergence from its most preferred nominal route. Selectabil-ity is obtained from a combination of two sub-utilities—baseand cooperative selectabilities. Base selectability considersthe deciding agent’s own preference only, by evaluatingthe degree of divergence from the agent’s most preferrednominal route when choosing an option. In contrast, cooper-ative selectability considers the preferences of neighboringagents in the priority set, and seeks an action that ensuressafe separation between itself and its priority set. Once thebase selectability and cooperative selectability are obtained,selectability is formed as a convex combination of those two,where the convex combination coefficient is called the rawpreference. If the priority set of the deciding agent is empty,it is trivial that its selectability follows the base selectability.
The satisficing action is determined to maximize theweighted difference between the dual utilities, where the
weight parameter is called the negotiation index. In thisresearch, the utility definitions of Archibald et al. [19] wereadapted for sUAV application. Table 1 summarizes the sim-ulation parameter values and the differences from previousstudy. The majority of existing studies [19, 24–26] assumedsmall action angles (θ ) ranging between 2.5° and 10°, whichare not suitable to address navigational characteristics ofsUAV. Furthermore, the preceding research studies used sin-gle fixed minimum separation (Rs). Given the number ofagents, increasing minimum separation (Rs) grows the prior-ity set, resulting in more congested traffic scenario in effect.
2.2 Model Assumptions and Formulation
Let us consider a set of homogeneous agents satisfying thefollowing properties. A sUAV agent (a) moves at the constantspeed of υ at fixed altitude, (b) takes one of three directionalactions, ‘maintain current heading’, ‘turn left’ or ‘turn right’with turn rate (action angle) θ , (c) executes necessary direc-tional action immediately, and (d) always prefers the shortestor nominal route between its current position and the desti-nation. The action set was modified to include three actions
123

International Journal of Aeronautical and Space Sciences
instead of five [19], where the action angle θ is assumed to bemuch larger than the manned aircraft case in the controlledairspace. A collision is said to occur at time t if the Euclideandistance of two agents is less than the minimum separationdistance Rs .
To assign the priority ranking, agents in the collision setCi
are evaluated based on two features—remaining distance tothe destination and total delay incurred due to conflict reso-lution. The remaining distance is calculated as the Euclideandistance between the current position and the destination.Agents within 100 m of their destination are assigned thehighest priority to increase throughput, and to avoid unnec-essary diversion near the destination. Once the first priority isgiven to the near-destination agents, all agents are assignedwith the unique ranking based on the total delay incurreddue to conflict resolution. An agent with larger flight delay isassigned with a higher ranking to increase efficiency. In thecase of identical delay, priority is randomly assigned. Prior-ity set of agent ui is then defined as Pi � {u j ∈ U : u j ∈ Ci ,p(u j
)> p(ui )}.
Since the action set was modified, base selectability σBi
(θ) of agent ui on action θ was modified to incorporate mod-ification in the action set Θ as follows:
σBi (θ) �
⎧⎨
⎩
36 ,
∣∣θ − θ∗i
∣∣ is the smallest26 ,
∣∣θ − θ∗i
∣∣ is the second smallest16 , otherwise
, (1)
where θ ∈ Θ and θ∗i be the direct heading from current posi-
tion pi to the destination Di of agentui . Toobtain cooperativeselectability σC
i (θ), the simplified model [19] was adoptedwith modified base selectability as shown in (1). Now, theselectability σi (θ) is defined as follows:
σi (θ) � γ · σBi (θ) + (1 − γ ) · σC
i (θ), γ ∈ [0, 1]. (2)
Here, γ is called the raw preference and representsthe level of selfishness in cooperative decision-making.Rejectability ρi (θ) of agent ui on the action θ is obtainedfollowing the rejectability definition in Archibald et al. withthe modified set of actions. Now, the satisficing action θ̇i ofagent ui is defined as follows.
θ̇i � argmaxθ∈Θ [σi (θ) − q · ρi (θ)], q ∈ [0, 1]. (3)
Intuitively speaking, the raw preference parameter γ mea-sures the level of selfishness in pursuing the most preferredaction, whereas the negotiation index q measures the levelof proactiveness to reduce collision risk. When both parame-ters are applied in combination, it is reasonable to anticipatethat γ and q will exhibit both complementary and redundantnature. As mentioned in the introduction, one of our researchgoals is to evaluate the effect of action angles by applying
several action angle values. The motivation was to find a setof reasonable action angle values to reflect the difference ofsUAV in navigational and control properties from larger jetaircraft. A choke point scenario is designed and simulatedfor 4356 combinations of satisficing parameters. Simulationdetail and numerical analysis result are presented in the fol-lowing chapter.
3 Chokepoint Scenario and PerformanceMeasures
3.1 Chokepoint Scenario
A symmetric scenario called the chokepoint model [6, 20] isused for simulation. In the chokepoint scenario, each agentdeparts simultaneously from an evenly spaced point on thecircle of 6 km radius to reach the point exactly opposite tothe starting point on the circle.
In the simulation, the detection range (K ) and speed ofsUAV (v) are assumed to be constant at 1500 m and 20 m/s.All other parameters including a total number of agents (N ),minimum separation (Rs), action angle (θ ), raw preference(γ ) and negotiation index (q) are simulated over ranges ofvalues. In total, 4356 combinations of scenarios are evalu-ated. The parameter values used in the simulation are listedin Table 1. Figure 2 shows three interim snapshots and trajec-tory of chokepoint simulationwith 64 agents at three differenttime-steps when q � 0.9, γ � 0.01, θ � 45, and Rs � 50.In Fig. 2, one can observe that agents show circular trajectorypatterns to prevent the collision.
3.2 PerformanceMeasures
Efficiency of the individual agent ui is defined as
πi �{0, if loss of separation occurs
t tnit t0i +t t
+i +t t
−i, otherwise
, (4)
where t tni is the minimum possible travel time between Oi
and Di on the nominal route, and t t0i , t t+i and t t−i are the
actual travel times after taking the action θ0, θ+ and θ−,respectively. The efficiency πi measures the travel time onthe shortest possible route in the unit of actual travel timefor ui that has successfully avoided collision. For ui that hasnot avoided collision, actual travel time of ui is assumed tobe infinite and πi becomes zero. Given the N participating
agents, the system efficiency is defined by Π �∑N
i�1 πiN .
In addition to πi , failure rate is measured as the proportionof agents that lost separation to the total number of agentsthat participate in the symmetric scenario. The failure ratefor N agents is, therefore, given by Φ � no.of collided agents
N .
123

International Journal of Aeronautical and Space Sciences
Fig. 2 Snapshots of chokepoint simulation for N� 64 when q � 0.9, γ � 0.01, θ � 45◦, and Rs � 50 m
Fig. 3 Contour plots of system efficiency Π with respect to γ and q
123

International Journal of Aeronautical and Space Sciences
Fig. 4 Contour plots of system efficiency Π with respect to θ and Rs
4 Results
4.1 System Efficiency
In Fig. 3, a set of contour plots of system efficiency measureΠ with respect to γ and q is presented. The z-axis of the plotrepresents N. Colors on the contour plot change from blackto light gray as the system efficiency Π improves. In otherwords, parameter combinations (γ , q) in the yellow area arethe satisficing parameters of themost successful and efficientcollision avoidance outcome. θ is identical column wise, andRs is identical row wise.
In the first row, we first notice that light traffic scenarioof N � 4 performs similarly in all scenarios. One can alsoobserve that larger θ tolerates more densely populated sce-narios of 16 and 64 agents. The effect of γ is generallybounded by q in most cases, except for the case with θ � 15◦with N � 64. It is intuitive that the γ would play a rolewhen the airspace is fairly crowded, yet the result indicatesthat increasing θ effectively preserves efficiency better thanselecting a good combination of γ and q.
The row-wise comparison reveals that the effect of largeRs is evident in reducing system efficiency in all cases,although large θ prevents rapid degradation. The benefit oflight traffic starts to disappear as Rs becomes large, althoughθ � 90◦ preserves the system efficiency to a certain degree.Imposing small γ with large q achieves higher efficiency bypreventing loss of separation.
InFig. 4, systemefficiency contour plots are shownagainstaction angle (θ ) and minimum separation (Rs). As shownin Fig. 3, the combination of parameters in the light grayarea implies better system efficiencyΠ than the combinationof parameters in the black area. In Fig. 4, one can observethat combinations of γ � 1 and q � 0.001 and γ � 0.5and q � 0.001 resulted in the worst performance overall,yielding Π � 0. Agents participating in those scenarios areselfish and reactive ones, insisting to choose the shortest pos-sible path while being extremely reluctant to take preventiveactions until the very last minute. The opposite case of smallγ and large q does not result in symmetric observations, asthe efficiency of γ � 0.001 and q � 0.001 is nearly identicalto γ � 0.001 and q � 1. In other words, the level of proac-tiveness in reducing collision risk has limited effect when allagents are altruistic, or the role of γ and q is redundant in thiscase. When we consider the sets of plots in the right diagonalin each figure, we observe that efficiency curves of those setof three plots are identical in all scenarios. Such observationslead us to conclude that balancing between γ and q is impor-tant for consistent performance, rather than the magnitude ofindividual parameters. In other words, one can expect fairlyconsistent efficiency outcome as long as the level of selfish-ness is matched with a similar level of proactiveness.
123

International Journal of Aeronautical and Space Sciences
Fig. 5 Failure rate plot with respect to N and Rs
4.2 Failure Rate
The failure rate Φ is evaluated for the 4356 scenarios andthe results are presented in Fig. 5. In the Fig., each parametercombination that resulted in failure rate larger than or equalto 0.5 is displayed in dot (θ � 15◦), circle (θ � 45◦) and,square (θ � 90◦), respectively, according to the action angle.In here, N is identical column wise and the Rs is identicalrow wise. The simulation parameter values of γ and q arerepresented on the axes. For example, in case of Rs � 100
and N � 64, a θ � 15◦ leads failure rate of 0.5 or moreregardless of (γ , q) combinations. It is observed θ � 15case is highly sensitive to other parameters, especially withincreasing N and Rs. Larger q combined with smaller γ
produces the least amount of failure as expected. Differencein θ makes a difference in failure rate when Rs is large, andthe agents are allowed to make less altruistic and proactivedecision.
123

International Journal of Aeronautical and Space Sciences
5 Conclusion
In this study, a cooperative sUAV collision avoidance frame-work based on satisficing theory is modeled and discussed.Assuming a lower speed and larger action angle for sUAV,combined effect of satisficing parameters was evaluatedbased on simulations of 4356 cases under chokepoint sce-nario.
Numerical analysis shows that the light traffic cases arerelatively immune to parameter changes. It is also observedthat the larger the action angle, the more effective and robustcollision avoidance is possible in general. Dual utility param-eters consisting of raw preference and negotiation index arefound effective under altruistic (small γ ) and proactive (largeq) level. Using small raw preference value with large negoti-ation index prevents a collision by enforcing more altruisticand proactive route decision.
Complementary and redundant nature of satisficingparameters was also observed. The combination of large rawpreference and small negotiation index leads the participat-ing agent to performworst. As long as the level of selfishnessismatchedwith similar level of proactiveness, one can expectfairly consistent system efficiency.However, when agents arealtruistic enough, the negotiation index has limited effect.Minimum separation parameter also affected overall failurerate and systemefficiency. In general, specifying a reasonablysmall separation minimum with larger action angle choicesproduces the best collision avoidance performance.
Findings from the simulation study suggest that there isno universal satisficing parameter combination that appliesto all traffic and conflict. In the environment with light trafficwith minimum obstacles, applying larger action angle andreasonable separation minimum would suffice. On contrary,high traffic density casewill benefit fromutilizing interactioneffects of satisficing parameters.
In conclusion, flexible action angle selection and reducingseparation minimum are most desirable, while dual utilityparameters of the satisficing framework are effective in high-density traffic scenario. Given the diverse flying environmentthat a sUAV needs to navigate, we conclude that an adaptiveand responsive collision avoidance strategy is required, andsatisficing framework provides an effectivemeans that adaptsto a variety of traffic condition.
Acknowledgements This researchwas supported in part byMinistry ofLand, Infrastructure and Transport of Korean government under Grant17USTR-B127901-01.
References
1. Austin R (2011) Unmanned aircraft systems: UAVS design, devel-opment and deployment, vol 54. Wiley, Honoken, NJ
2. Tomlin C, Pappas GJ, Sastry S (1998) Conflict resolution for airtraffic management: a study in multiagent hybrid systems. IEEETrans Autom Control 43(4):509–521
3. Eby MS, Kelly WE (1999) Free flight separation assurance usingdistributed algorithms. In: Aerospace conference, 1999. Proceed-ings IEEE, pp 429–441
4. Eby MS (1994) A self-organisational approach for resolving airtraffic conflicts. Linc Lab J 7(2):239–254
5. Pallottino L, Feron EM, Bicchi A (2002) Conflict resolution prob-lems for air traffic management systems solved with mixed integerprogramming. IEEE Trans Intell Transp Syst 3(1):3–11
6. Tang J, PieraMA,Guasch T (2016) Coloured Petri net-based trafficcollision avoidance system encounter model for the analysis ofpotential induced collisions. Transp Res Part C Emerg Technol67:357–377
7. Ruiz S, Piera MA, Nosedal J, Ranieri A (2014) Strategic de-confliction in the presence of a large number of 4D trajectoriesusing a causal modeling approach. Transp Res Part C Emerg Tech-nol 39:129–147
8. Qian X, Mao J, Chen C-H, Chen S, Yang C (2017) Coordinatedmulti-aircraft 4D trajectories planning considering buffer safetydistance and fuel consumption optimization via pure-strategygame. Transp Res Part C Emerg Technol 81:18–35
9. Kopardekar P, Rios J, Prevot T, Johnson M, Jung J, Robinson J(2016) Unmanned aircraft system traffic management (UTM) con-cept of operations. In: AIAA aviation forum
10. Carbone C, Ciniglio U, Corraro F, Luongo S (2006) A novel3D geometric algorithm for aircraft autonomous collision avoid-ance. In: Decision and control, 2006 45th IEEE conference, pp1580–1585
11. NieuwenhuisenM, SchadlerM, Behnke S (2013) Predictive poten-tial field-based collision avoidance for multicopters. Int ArchPhotogramm Remote Sens Spatial Inf Sci 1(2):293–298
12. Sun J, Tang J, Lao S (2017) Collision avoidance for coopera-tive UAVs with optimized artificial potential field algorithm. IEEEAccess 5:18382–18390
13. Temizer S, Kochenderfer M, Kaelbling L, Lozano-Pérez T, KucharJ (2010) Collision avoidance for unmanned aircraft using Markovdecision processes. In: AIAA guidance, navigation, and controlconference, p 8040
14. BaiH,HsuD,KochenderferMJ,LeeWS(2012)Unmanned aircraftcollision avoidance using continuous-state POMDPs. Robot SciSyst VII 1:1–8
15. Richards A, How JP (2002) Aircraft trajectory planning withcollision avoidance using mixed integer linear programming. In:American control conference, 2002. Proceedings of the IEEE, pp1936–1941
16. Cui P, Yan W, Wang Y (2017) Reactive path planning approachfor docking robots in unknown environment. J Adv Transport2017:1–11
17. Johnson F, Hill J, Archibald J, Frost R, Stirling W (2005) A satis-ficing approach to free flight. In: Networking, sensing and control,2005. Proceedings IEEE, pp 123–128
18. Hill J, Archibald J, StirlingW, Frost R (2005) Amulti-agent systemarchitecture for distributed air traffic control. In: AIAA guidance,navigation, and control conference and exhibit, p 6049
19. Archibald JK, Hill JC, Jepsen NA, StirlingWC, Frost RL (2008) Asatisficing approach to aircraft conflict resolution. IEEE Trans SystMan Cybern Part C (Applications and Reviews) 38(4):510–521
20. Stirling WC, Goodrich MA (1999) Satisficing games. Inf Sci114(1–4):255–280
123

International Journal of Aeronautical and Space Sciences
21. Stirling WC, Goodrich MA, Packard DJ (2002) Satisficing equi-libria. In: Parsons S, Gmytrasiewicz P, Wooldridge M (eds) Gametheory and decision theory in agent-based systems. Multiagentsystems, artificial societies, and simulated organizations, vol 5.Springer, Boston, pp 235–265
22. Simon HA (1955) A behavioral model of rational choice. Q J Econ69(1):99–118
23. Stirling WC (2003) Satisficing games and decision making: withapplications to engineering and computer science. Cambridge Uni-versity Press, Cambridge
24. Xiaohui J, Xuejun Z, Xiangmin G (2012) A collision avoidancemethod based on satisficing game theory. In: 2012 4th internationalconference on intelligent human-machine systems and cybernetics
25. Bellomi F, Bonato R, Tedeschi A, Nanni V (2008) Satisficing gametheory for conflict resolution and traffic optimization. Air TrafficControl Q 16(3):211–233
26. Taurino D, Frau G, Beato V, Tedeschi A (2011) ADS-B basedseparation support for general aviation. In: Proceedings of the 1stinternational conference on application and theory of automationin command and control systems. IRIT Press, Toulouse
Publisher’s Note Springer Nature remains neutral with regard to juris-dictional claims in published maps and institutional affiliations.
123