
Controllo di Veicoli Anolonomi su Ruota - dei.unipd.itschenato/TESI/Slides_Agnoli.pdf · La...
28
Corso di Laurea Specialistica in Ingegneria dell'Automazione Controllo di Veicoli Anolonomi Controllo di Veicoli Anolonomi su Ruota su Ruota Relatore: Prof. Luca Schenato Laureando: Alessandro Agnoli matr. 546997-IAM Padova, 22 ottobre 2007
Transcript of Controllo di Veicoli Anolonomi su Ruota - dei.unipd.itschenato/TESI/Slides_Agnoli.pdf · La...
Corso di Laurea Specialisticain Ingegneria dell'Automazione
Controllo di Veicoli AnolonomiControllo di Veicoli Anolonomisu Ruotasu Ruota
Relatore: Prof. Luca Schenato
Laureando: Alessandro Agnoli
matr. 546997-IAM
Padova, 22 ottobre 2007

2
Controllo di Veicoli Anolonomi su Ruota
Laureando: Alessandro AgnoliRelatore: Prof. Luca Schenato
1. Applicazioni1. Applicazioni
3
Controllo di Veicoli Anolonomi su Ruota
Laureando: Alessandro AgnoliRelatore: Prof. Luca Schenato
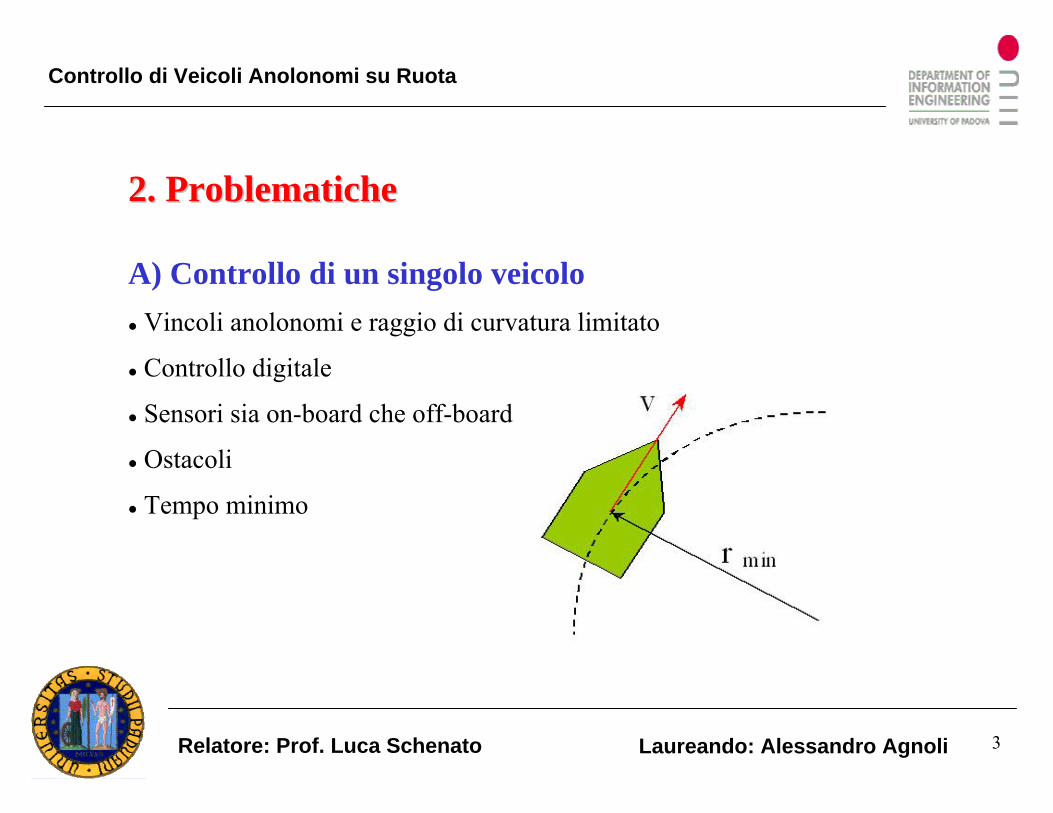
A) Controllo di un singolo veicoloVincoli anolonomi e raggio di curvatura limitato
Controllo digitale
Sensori sia on-board che off-board
Ostacoli
Tempo minimo
2. Problematiche2. Problematiche

4
Controllo di Veicoli Anolonomi su Ruota
Laureando: Alessandro AgnoliRelatore: Prof. Luca Schenato
B) Controllo di molteplici veicoliControllo distribuito
Scalabilità
Mantenimento connettività
Limitata visibilità
Capacità di auto-organizzazione
Robustezza
2. Problematiche2. Problematiche
5
Controllo di Veicoli Anolonomi su Ruota
Laureando: Alessandro AgnoliRelatore: Prof. Luca Schenato
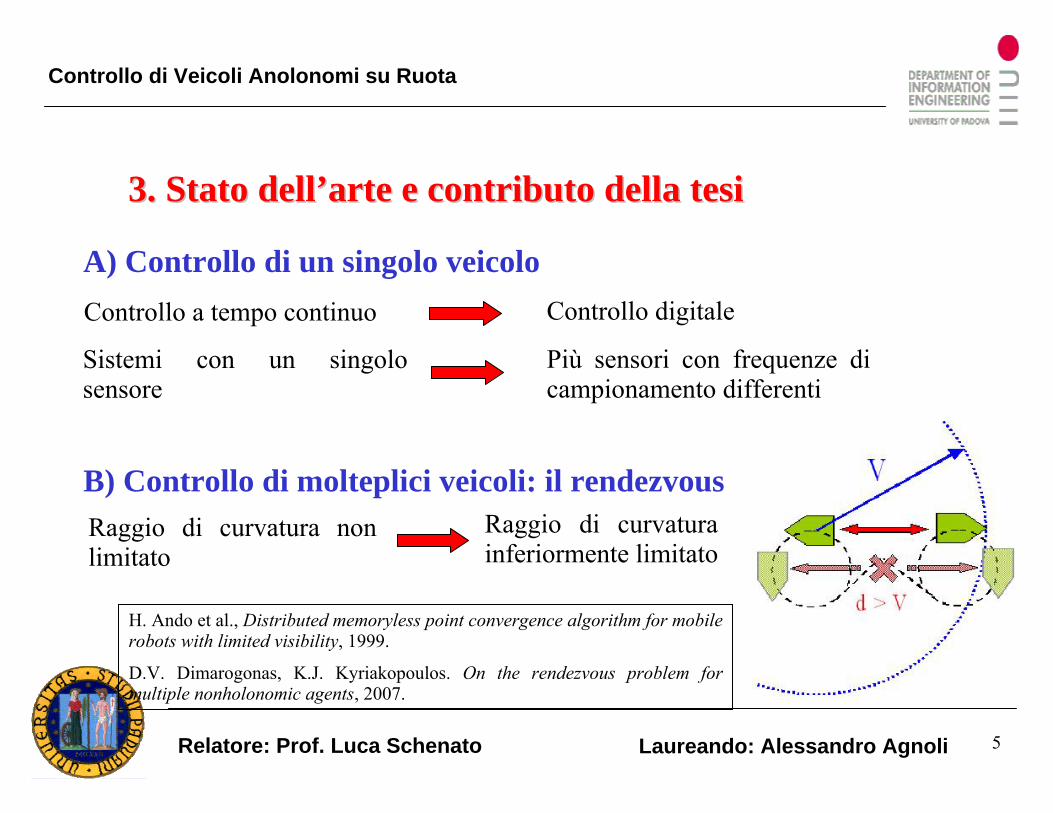
A) Controllo di un singolo veicolo
B) Controllo di molteplici veicoli: il rendezvous
3. Stato dell3. Stato dell’’arte e contributo della tesiarte e contributo della tesi
Raggio di curvatura non limitato
Raggio di curvatura inferiormente limitato
Controllo a tempo continuo Controllo digitale
Sistemi con un singolo sensore
Più sensori con frequenze di campionamento differenti
H. Ando et al., Distributed memoryless point convergence algorithm for mobile robots with limited visibility, 1999.
D.V. Dimarogonas, K.J. Kyriakopoulos. On the rendezvous problem for multiple nonholonomic agents, 2007.
6
Controllo di Veicoli Anolonomi su Ruota
Laureando: Alessandro AgnoliRelatore: Prof. Luca Schenato
4. Controllo di un veicolo di Dubins4. Controllo di un veicolo di Dubins
⎪⎩
⎪⎨
⎧
=
==
ωθ
θθ
&
&
&
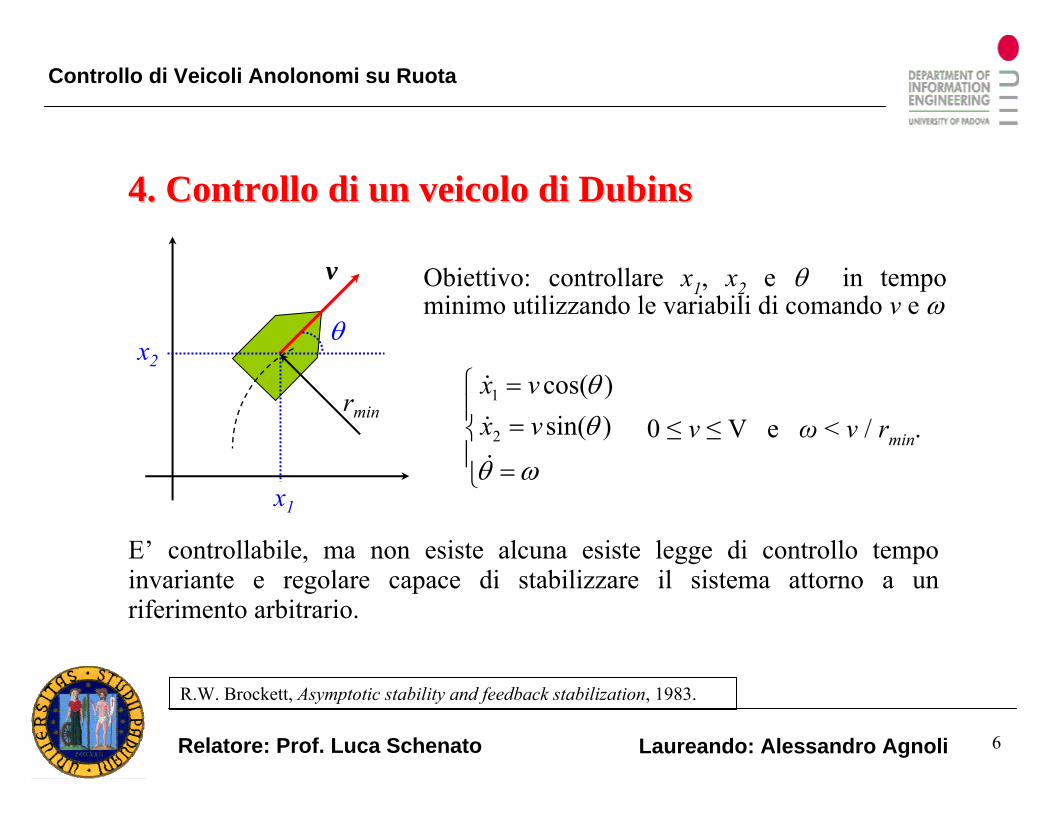
)sin()cos(
2
1
vxvx
0 ≤ v ≤ V e ω < v / rmin. rmin
v
θx2
x1
E’ controllabile, ma non esiste alcuna esiste legge di controllo tempo invariante e regolare capace di stabilizzare il sistema attorno a un riferimento arbitrario.
Obiettivo: controllare x1, x2 e θ in tempo minimo utilizzando le variabili di comando v e ω
R.W. Brockett, Asymptotic stability and feedback stabilization, 1983.
7
Controllo di Veicoli Anolonomi su Ruota
Laureando: Alessandro AgnoliRelatore: Prof. Luca Schenato
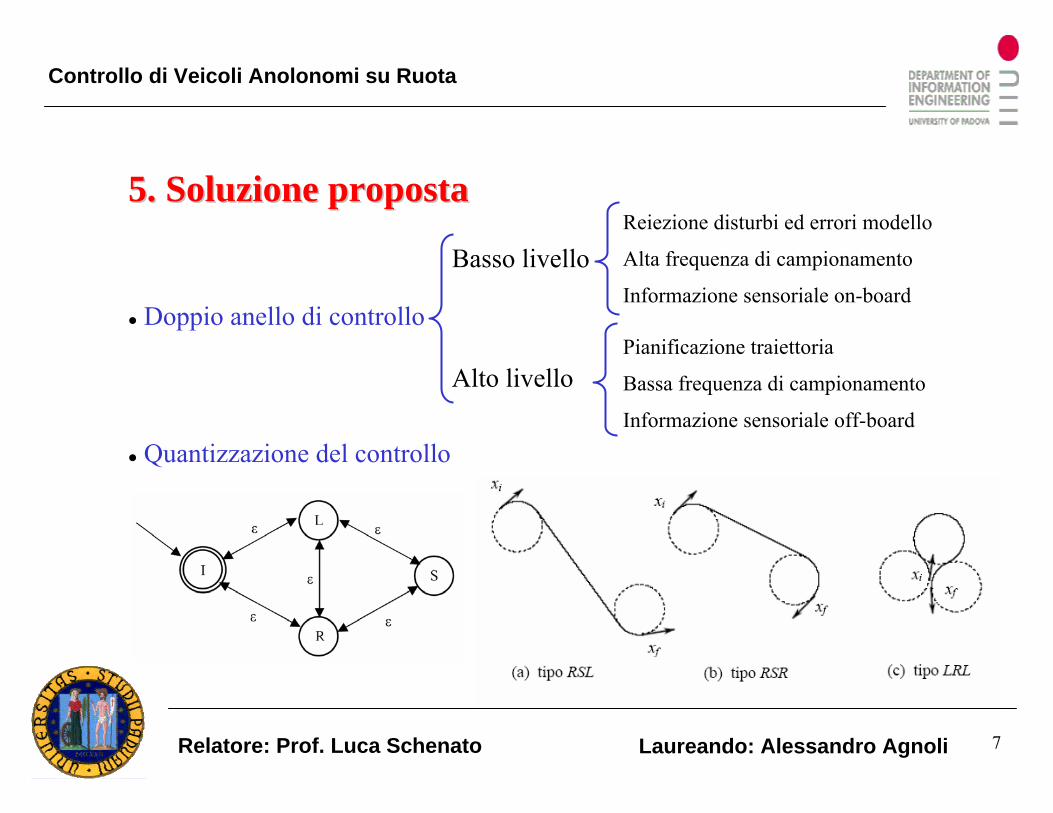
Doppio anello di controllo
Quantizzazione del controllo
5. Soluzione proposta5. Soluzione proposta
Basso livello
Alto livello
Reiezione disturbi ed errori modello
Alta frequenza di campionamento
Informazione sensoriale on-board
Pianificazione traiettoria
Bassa frequenza di campionamento
Informazione sensoriale off-board
8
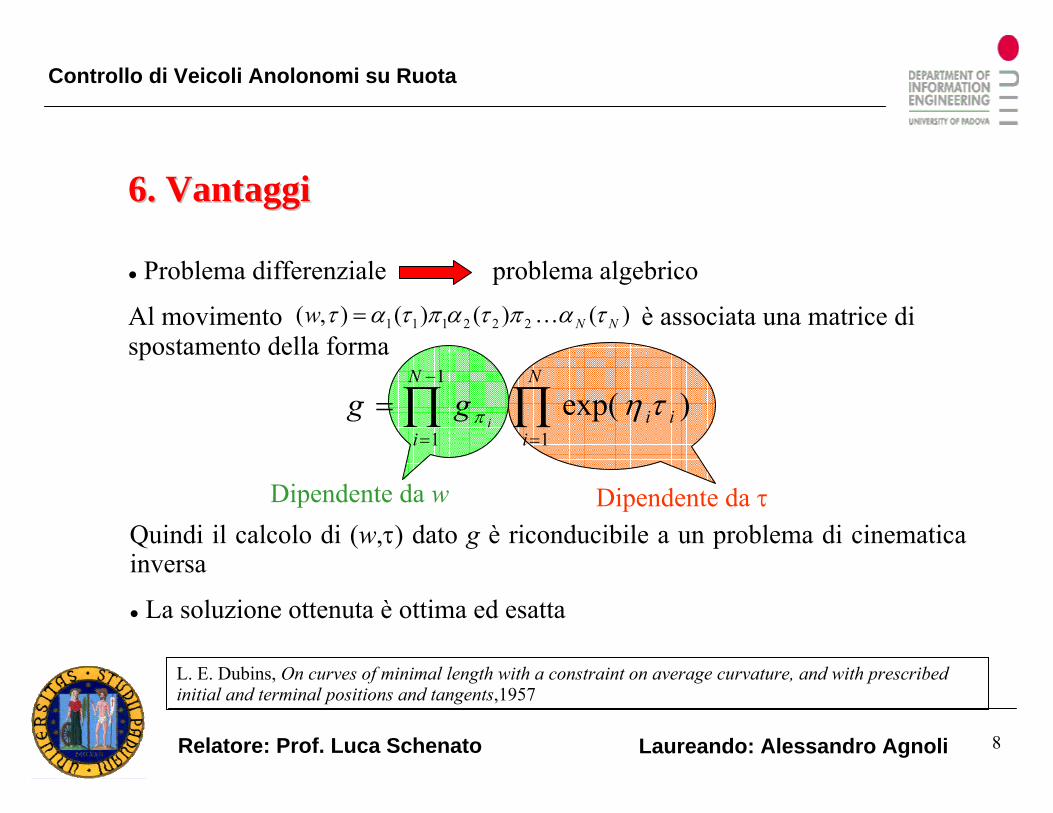
Problema differenziale problema algebrico
Al movimento è associata una matrice di spostamento della forma
Controllo di Veicoli Anolonomi su Ruota
Laureando: Alessandro AgnoliRelatore: Prof. Luca Schenato
6. Vantaggi6. Vantaggi
L. E. Dubins, On curves of minimal length with a constraint on average curvature, and with prescribed initial and terminal positions and tangents,1957
)()()(),( 222111 NNw ταπταπτατ K=
Dipendente da w Dipendente da τ
∏∏=
−
=
=N
iii
N
ii
gg1
1
1
)exp( τηπ
Quindi il calcolo di (w,τ) dato g è riconducibile a un problema di cinematica inversa
La soluzione ottenuta è ottima ed esatta
9
Controllo di Veicoli Anolonomi su Ruota
Laureando: Alessandro AgnoliRelatore: Prof. Luca Schenato
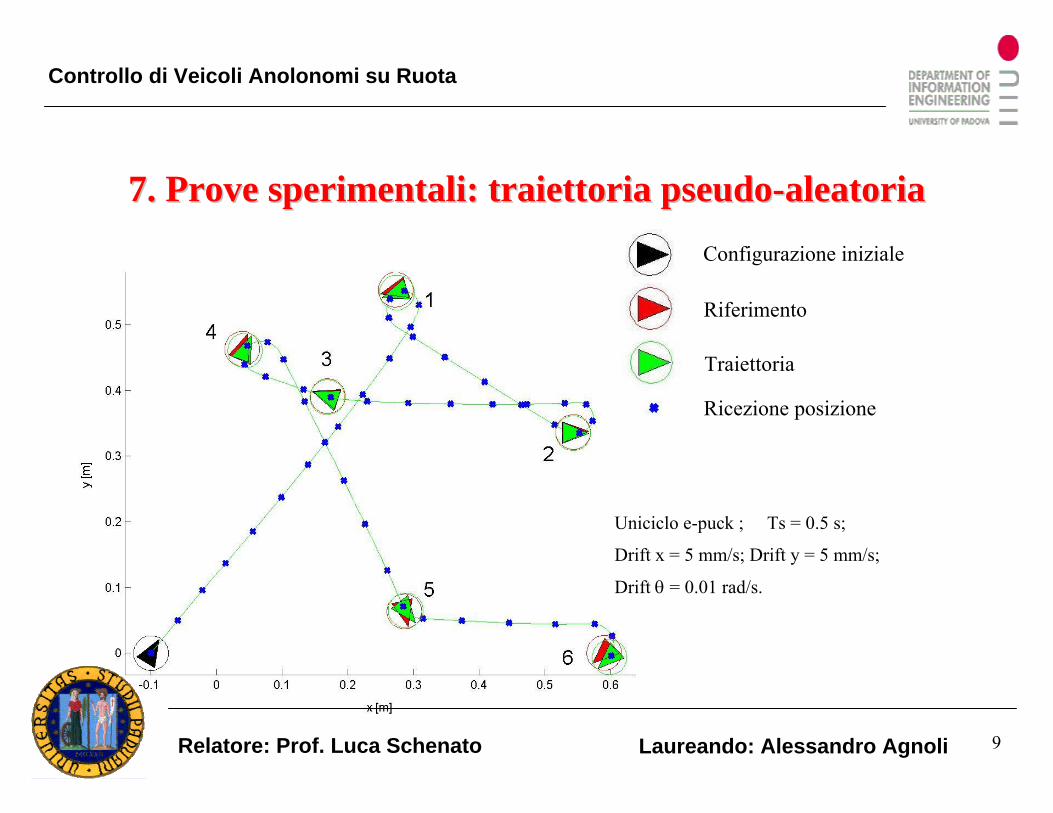
7. Prove sperimentali: traiettoria pseudo7. Prove sperimentali: traiettoria pseudo--aleatoriaaleatoria
Uniciclo e-puck ; Ts = 0.5 s;
Drift x = 5 mm/s; Drift y = 5 mm/s;
Drift θ = 0.01 rad/s.
Configurazione iniziale
Riferimento
Traiettoria
Ricezione posizione
10
Controllo di Veicoli Anolonomi su Ruota
Laureando: Alessandro AgnoliRelatore: Prof. Luca Schenato
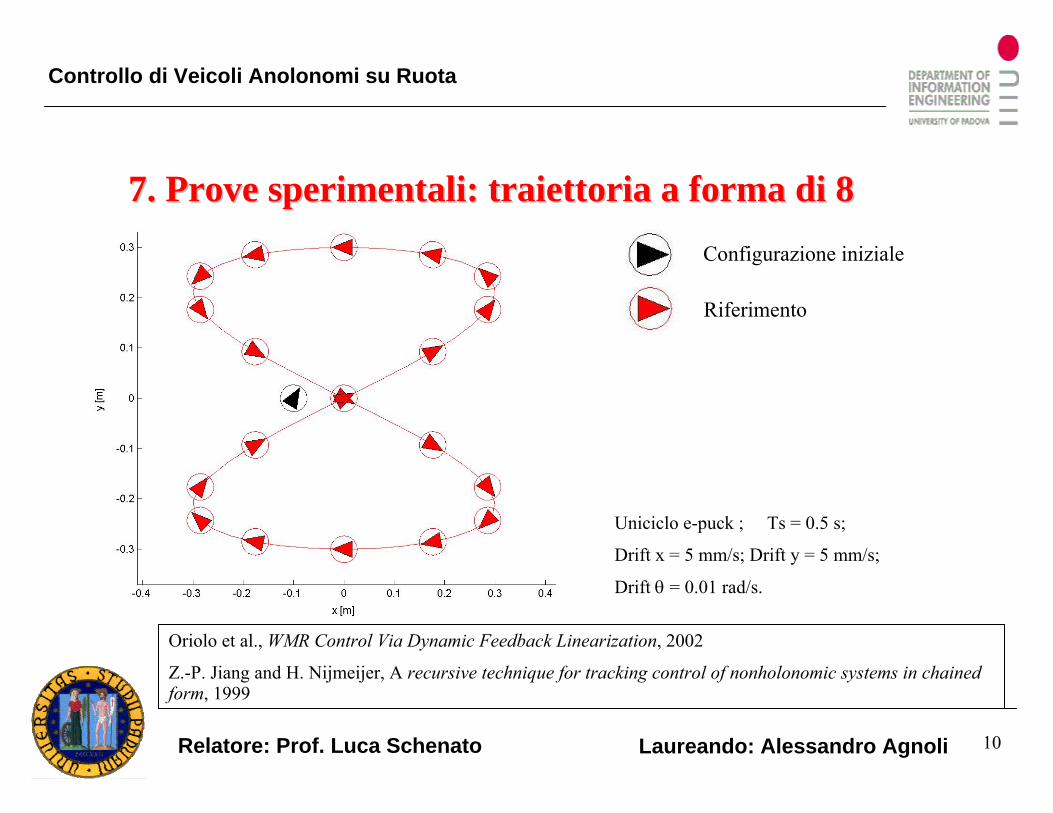
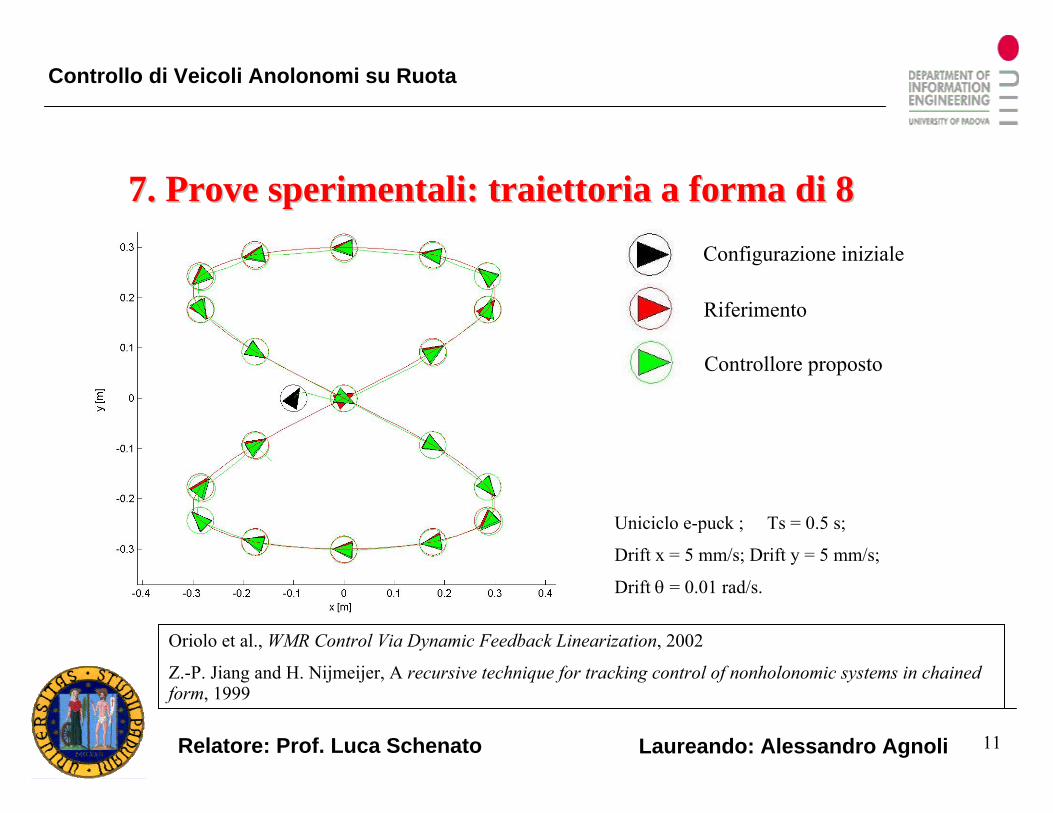
7. Prove sperimentali: traiettoria a forma di 87. Prove sperimentali: traiettoria a forma di 8
Riferimento
Configurazione iniziale
Oriolo et al., WMR Control Via Dynamic Feedback Linearization, 2002
Z.-P. Jiang and H. Nijmeijer, A recursive technique for tracking control of nonholonomic systems in chained form, 1999
Uniciclo e-puck ; Ts = 0.5 s;
Drift x = 5 mm/s; Drift y = 5 mm/s;
Drift θ = 0.01 rad/s.
11
Controllo di Veicoli Anolonomi su Ruota
Laureando: Alessandro AgnoliRelatore: Prof. Luca Schenato
7. Prove sperimentali: traiettoria a forma di 87. Prove sperimentali: traiettoria a forma di 8
Riferimento
Configurazione iniziale
Controllore proposto
Oriolo et al., WMR Control Via Dynamic Feedback Linearization, 2002
Z.-P. Jiang and H. Nijmeijer, A recursive technique for tracking control of nonholonomic systems in chained form, 1999
Uniciclo e-puck ; Ts = 0.5 s;
Drift x = 5 mm/s; Drift y = 5 mm/s;
Drift θ = 0.01 rad/s.
12
Controllo di Veicoli Anolonomi su Ruota
Laureando: Alessandro AgnoliRelatore: Prof. Luca Schenato
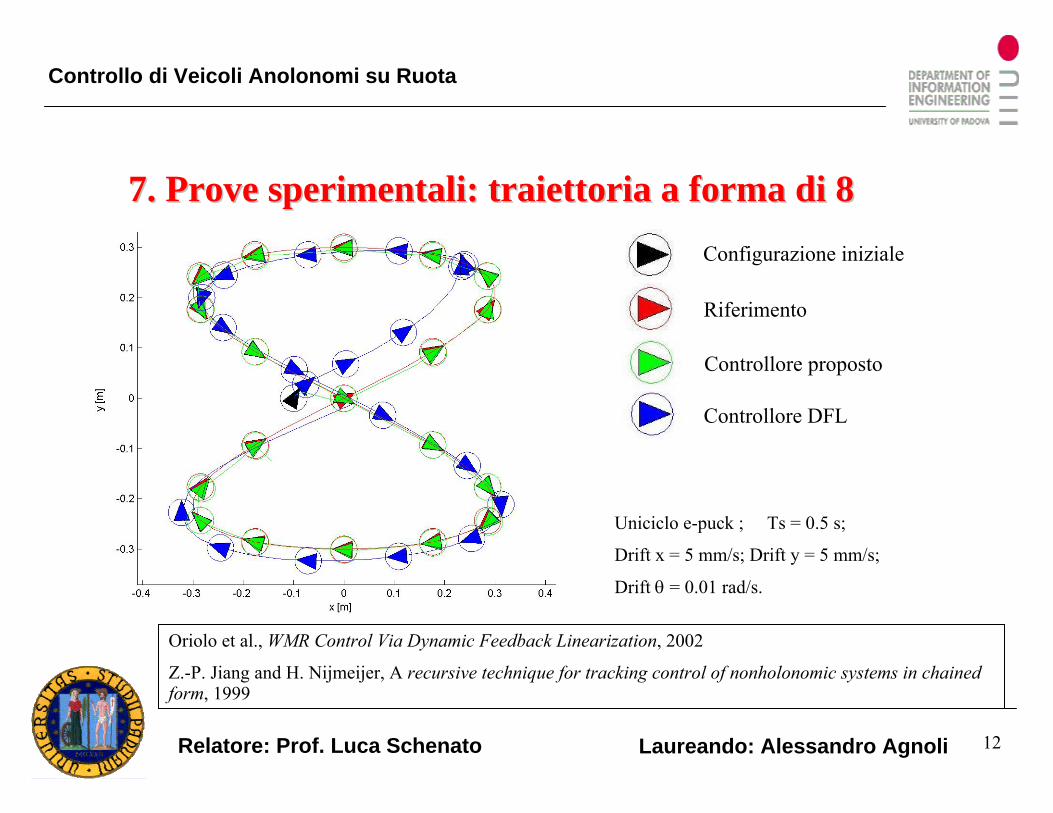
7. Prove sperimentali: traiettoria a forma di 87. Prove sperimentali: traiettoria a forma di 8Configurazione iniziale
Riferimento
Controllore proposto
Controllore DFL
Oriolo et al., WMR Control Via Dynamic Feedback Linearization, 2002
Z.-P. Jiang and H. Nijmeijer, A recursive technique for tracking control of nonholonomic systems in chained form, 1999
Uniciclo e-puck ; Ts = 0.5 s;
Drift x = 5 mm/s; Drift y = 5 mm/s;
Drift θ = 0.01 rad/s.
13
Controllo di Veicoli Anolonomi su Ruota
Laureando: Alessandro AgnoliRelatore: Prof. Luca Schenato
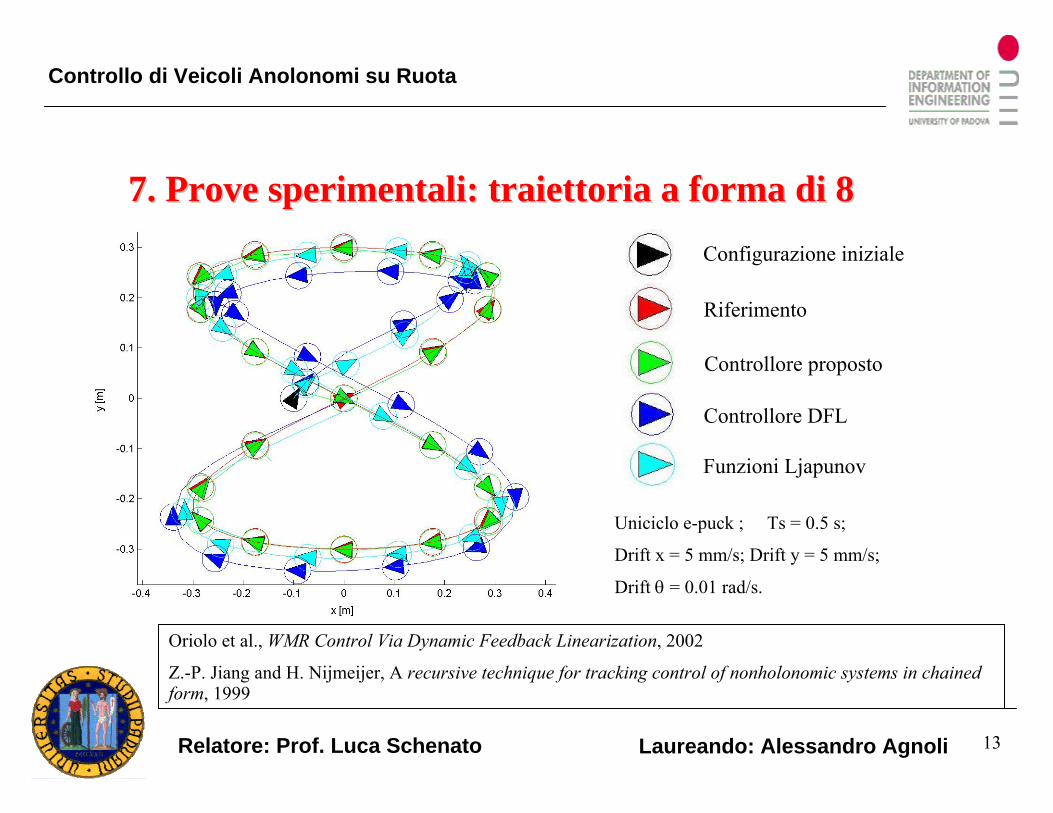
7. Prove sperimentali: traiettoria a forma di 87. Prove sperimentali: traiettoria a forma di 8Configurazione iniziale
Riferimento
Controllore proposto
Controllore DFL
Funzioni Ljapunov
Uniciclo e-puck ; Ts = 0.5 s;
Drift x = 5 mm/s; Drift y = 5 mm/s;
Drift θ = 0.01 rad/s.
Oriolo et al., WMR Control Via Dynamic Feedback Linearization, 2002
Z.-P. Jiang and H. Nijmeijer, A recursive technique for tracking control of nonholonomic systems in chained form, 1999
14
Controllo di Veicoli Anolonomi su Ruota
Laureando: Alessandro AgnoliRelatore: Prof. Luca Schenato
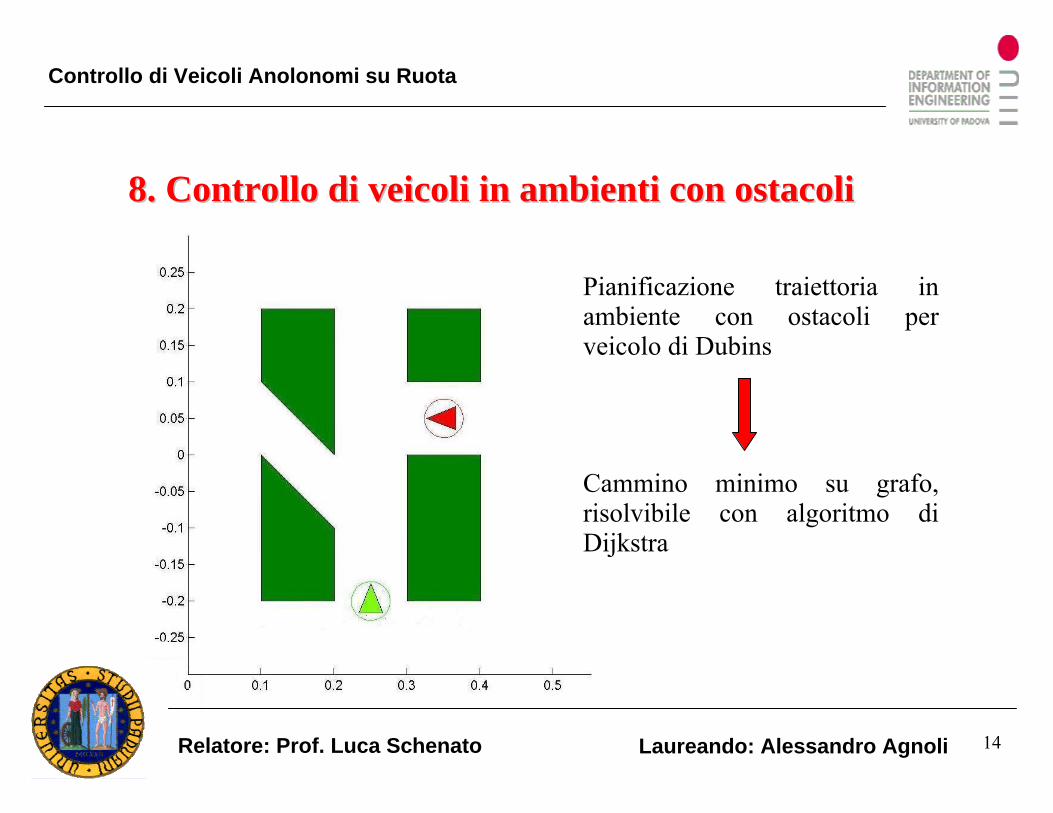
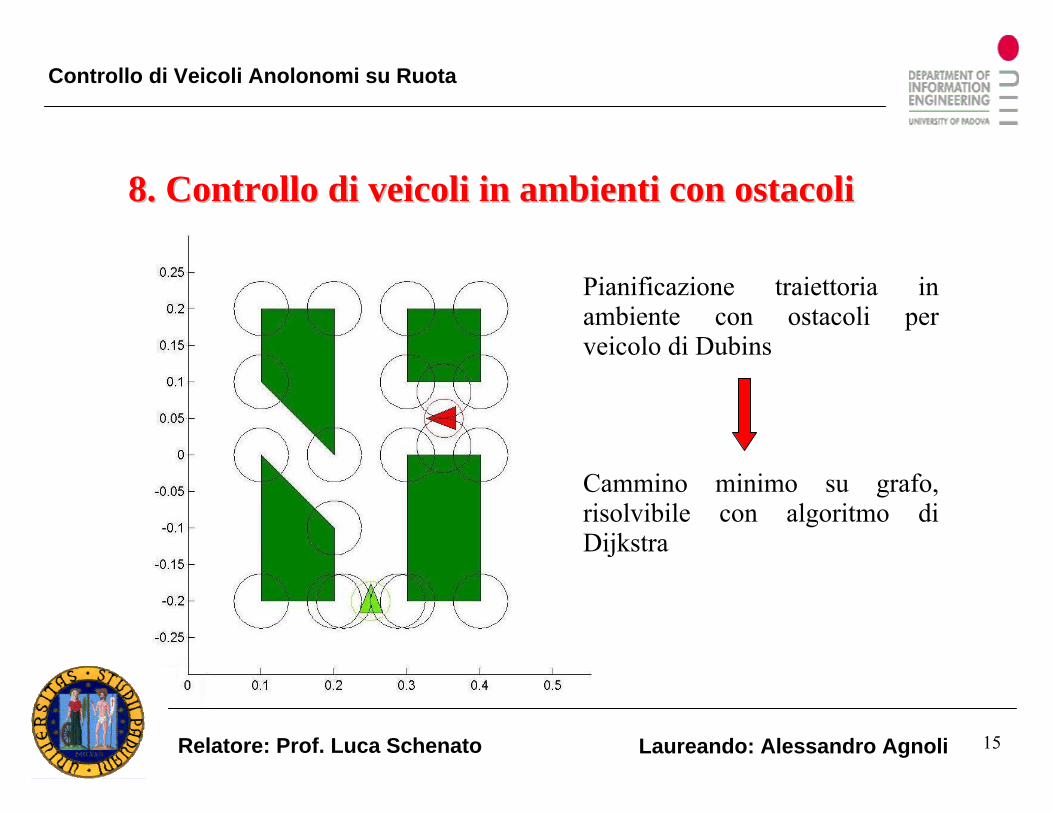
8. Controllo di veicoli in ambienti con ostacoli8. Controllo di veicoli in ambienti con ostacoli
Pianificazione traiettoria in ambiente con ostacoli per veicolo di Dubins
Cammino minimo su grafo, risolvibile con algoritmo di Dijkstra
15
Controllo di Veicoli Anolonomi su Ruota
Laureando: Alessandro AgnoliRelatore: Prof. Luca Schenato
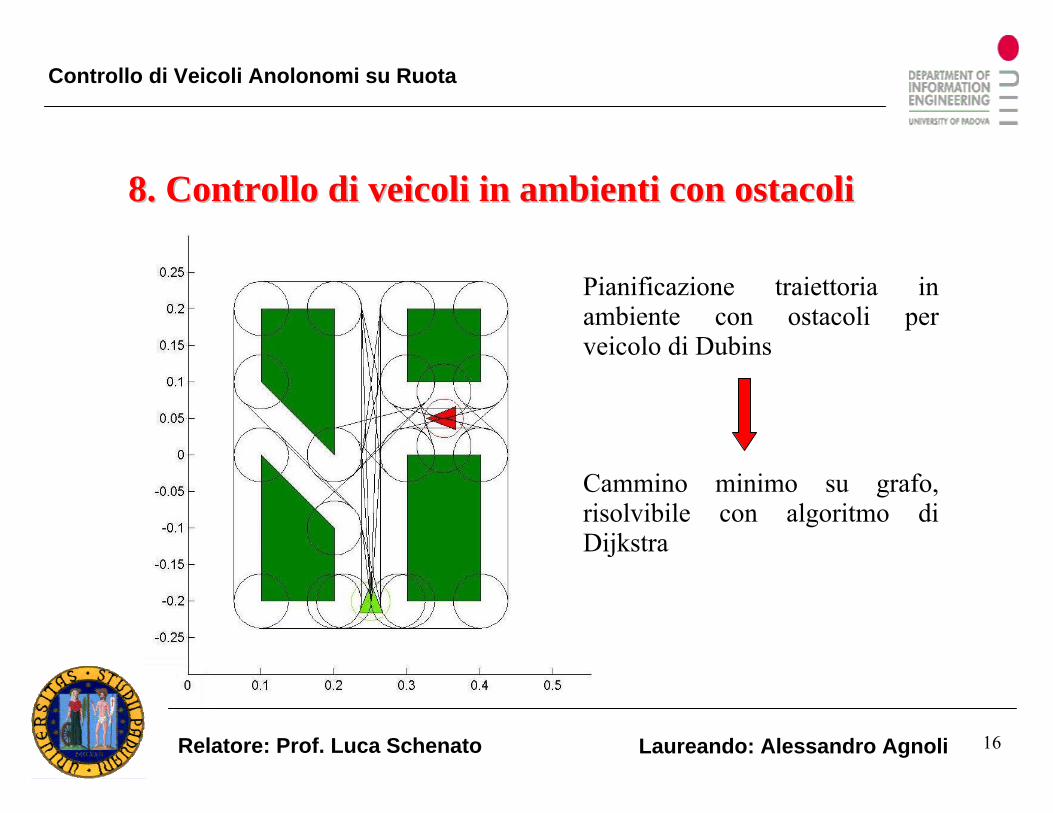
8. Controllo di veicoli in ambienti con ostacoli8. Controllo di veicoli in ambienti con ostacoli
Pianificazione traiettoria in ambiente con ostacoli per veicolo di Dubins
Cammino minimo su grafo, risolvibile con algoritmo di Dijkstra
16
Controllo di Veicoli Anolonomi su Ruota
Laureando: Alessandro AgnoliRelatore: Prof. Luca Schenato
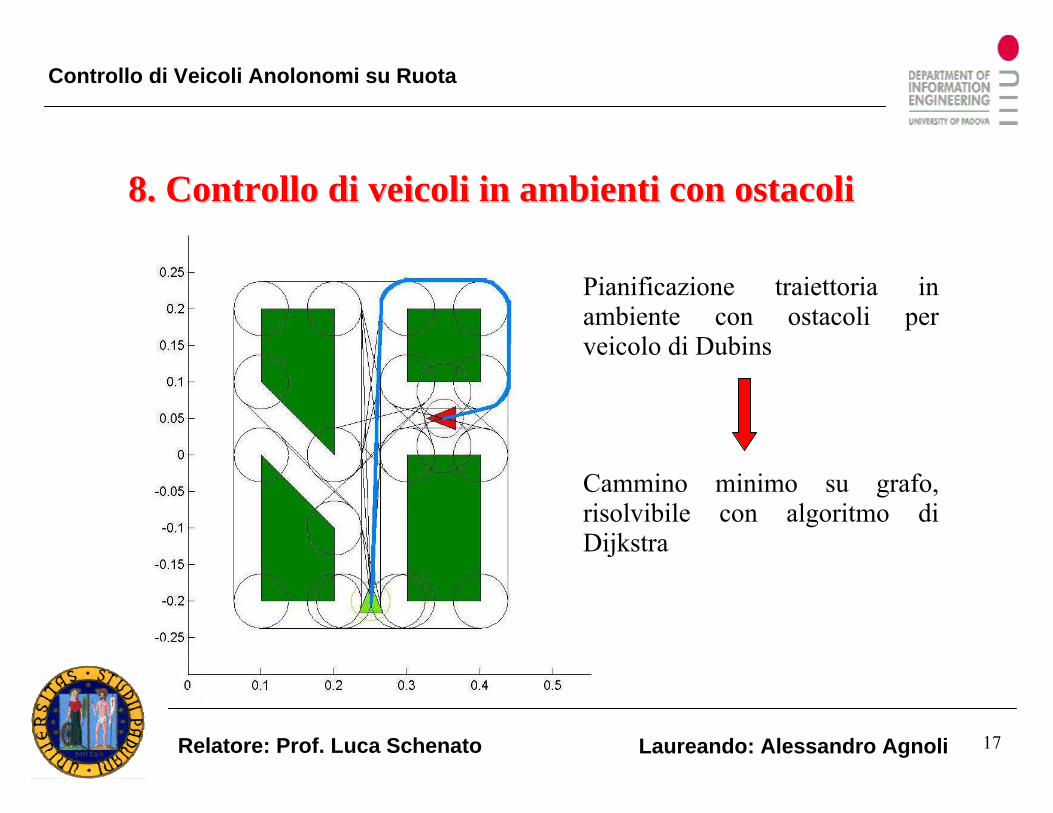
8. Controllo di veicoli in ambienti con ostacoli8. Controllo di veicoli in ambienti con ostacoli
Pianificazione traiettoria in ambiente con ostacoli per veicolo di Dubins
Cammino minimo su grafo, risolvibile con algoritmo di Dijkstra
17
Controllo di Veicoli Anolonomi su Ruota
Laureando: Alessandro AgnoliRelatore: Prof. Luca Schenato
8. Controllo di veicoli in ambienti con ostacoli8. Controllo di veicoli in ambienti con ostacoli
Pianificazione traiettoria in ambiente con ostacoli per veicolo di Dubins
Cammino minimo su grafo, risolvibile con algoritmo di Dijkstra
18
Controllo di Veicoli Anolonomi su Ruota
Laureando: Alessandro AgnoliRelatore: Prof. Luca Schenato
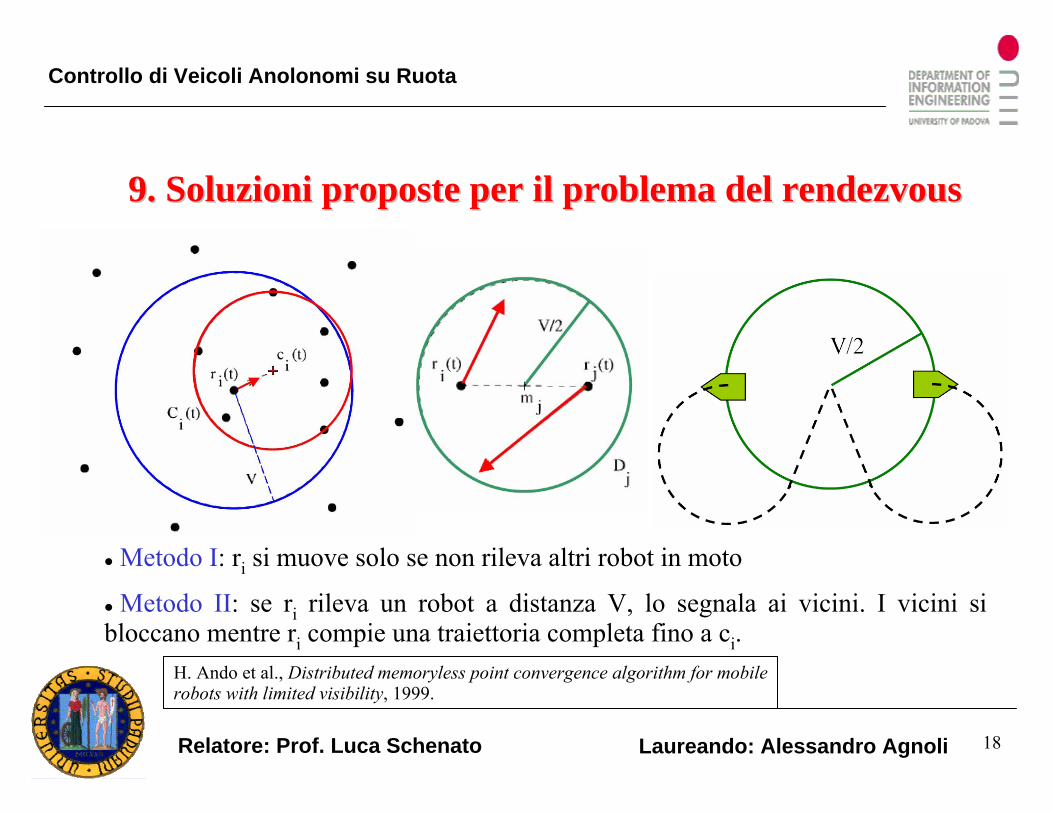
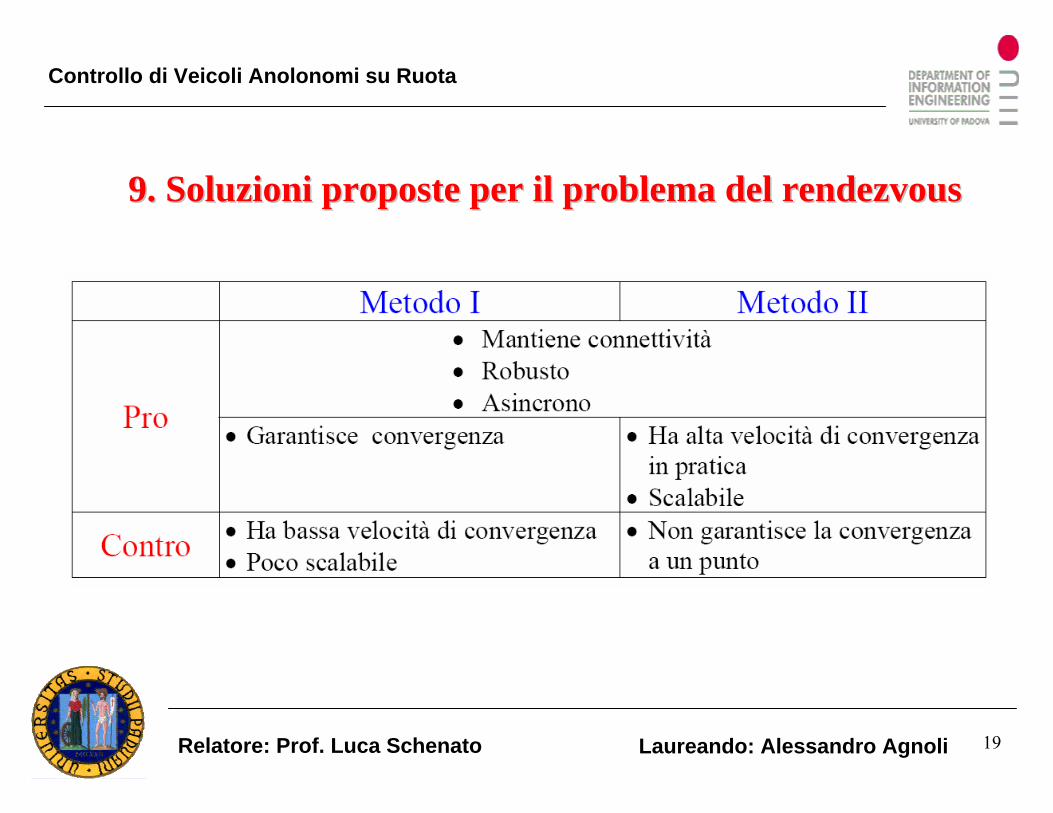
9. Soluzioni proposte per il problema del rendezvous9. Soluzioni proposte per il problema del rendezvous
H. Ando et al., Distributed memoryless point convergence algorithm for mobile robots with limited visibility, 1999.
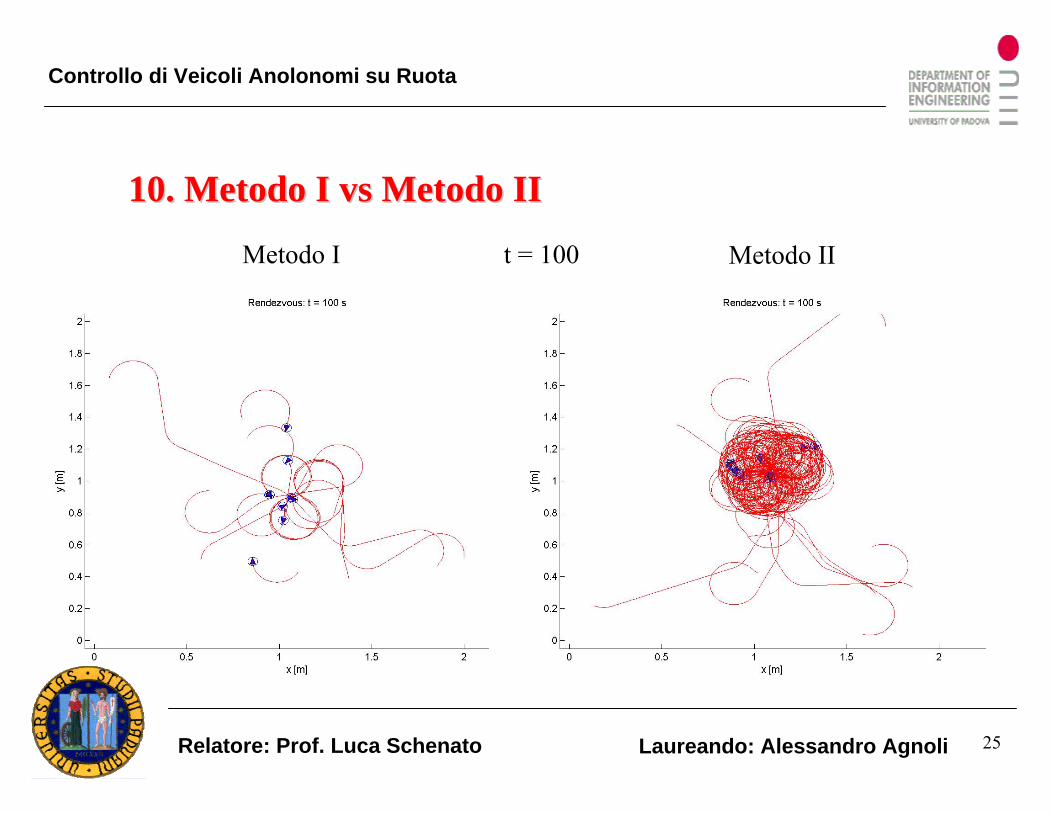
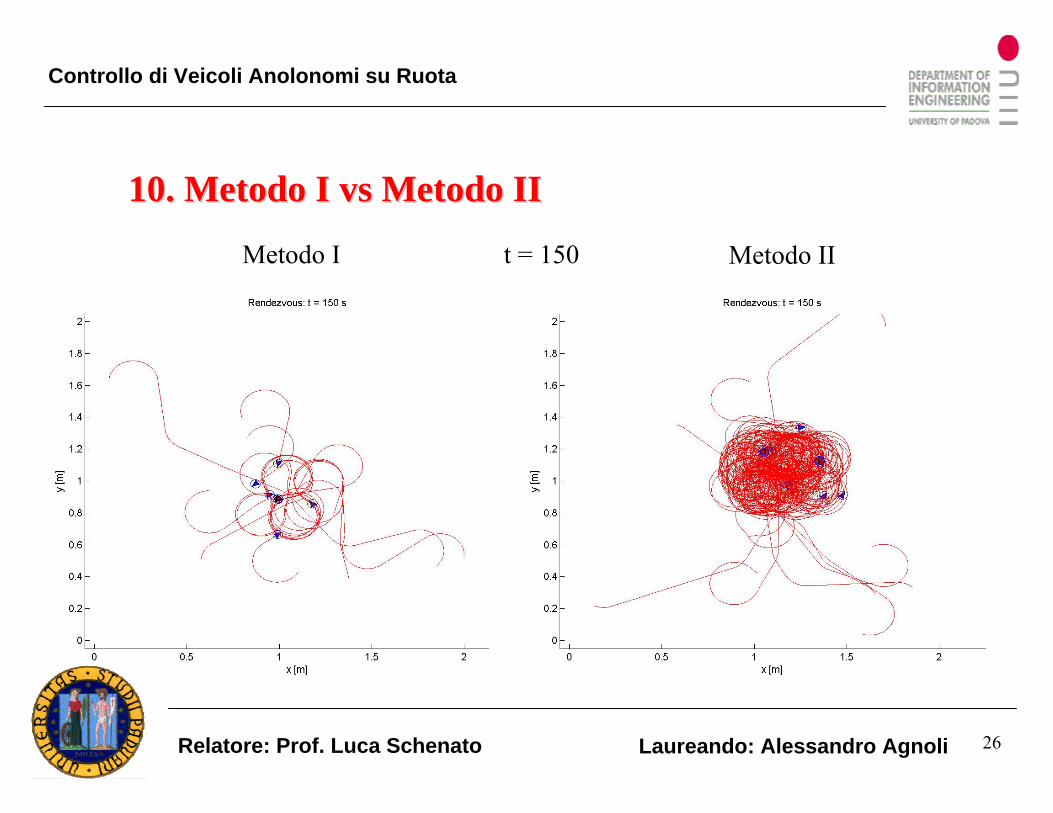
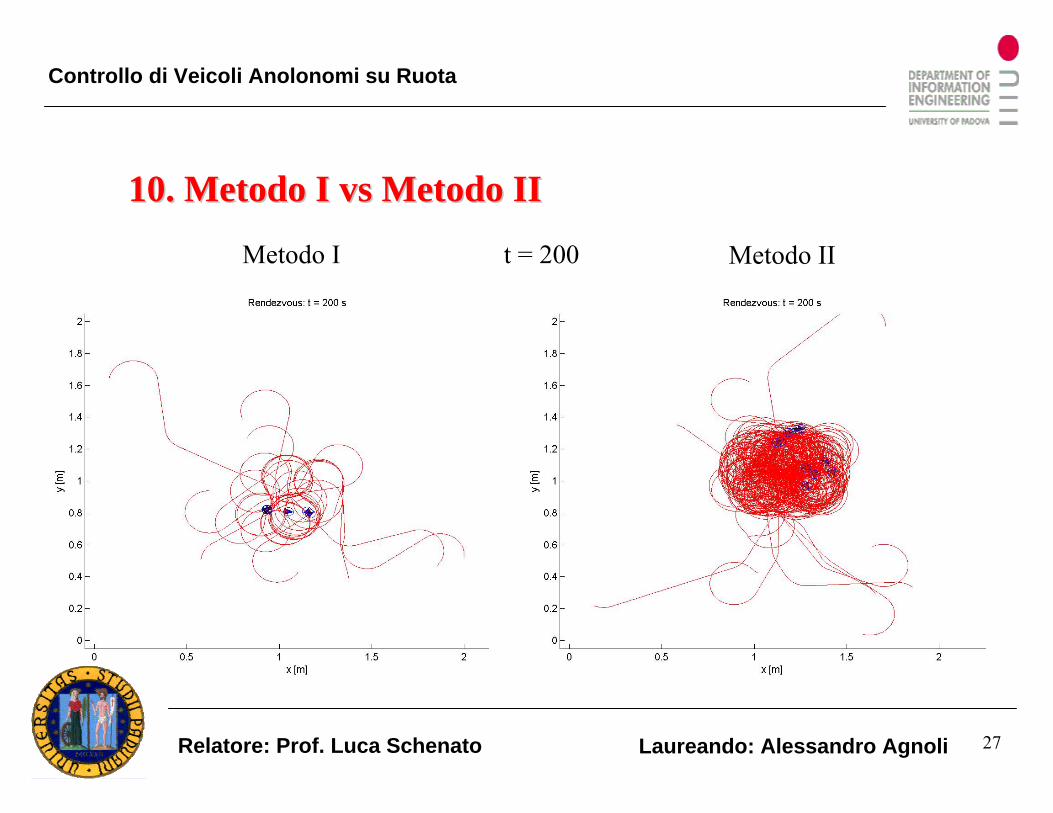
Metodo I: ri si muove solo se non rileva altri robot in moto
Metodo II: se ri rileva un robot a distanza V, lo segnala ai vicini. I vicini sibloccano mentre ri compie una traiettoria completa fino a ci.
19
Controllo di Veicoli Anolonomi su Ruota
Laureando: Alessandro AgnoliRelatore: Prof. Luca Schenato
9. Soluzioni proposte per il problema del rendezvous9. Soluzioni proposte per il problema del rendezvous
20
Controllo di Veicoli Anolonomi su Ruota
Laureando: Alessandro AgnoliRelatore: Prof. Luca Schenato
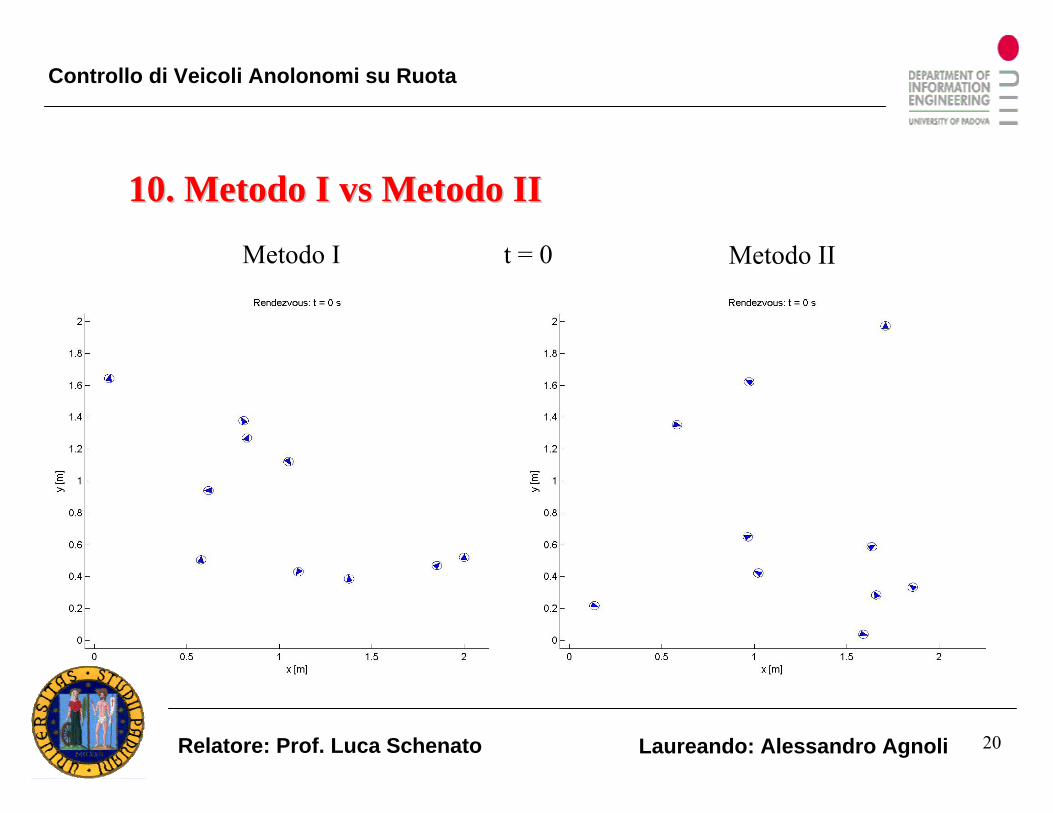
10. Metodo I vs Metodo II10. Metodo I vs Metodo II
Metodo I Metodo IIt = 0

21
Controllo di Veicoli Anolonomi su Ruota
Laureando: Alessandro AgnoliRelatore: Prof. Luca Schenato
Metodo I Metodo IIt = 5
10. Metodo I vs Metodo II10. Metodo I vs Metodo II
22
Controllo di Veicoli Anolonomi su Ruota
Laureando: Alessandro AgnoliRelatore: Prof. Luca Schenato
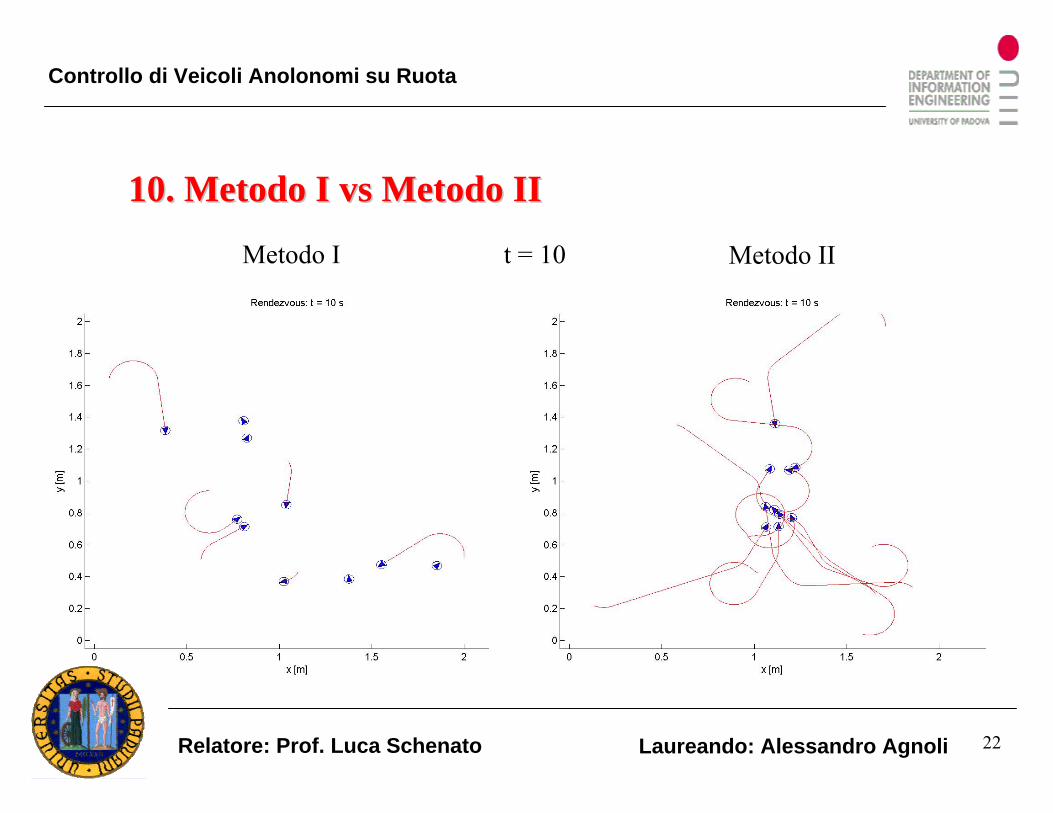
Metodo I Metodo IIt = 10
10. Metodo I vs Metodo II10. Metodo I vs Metodo II
23
Controllo di Veicoli Anolonomi su Ruota
Laureando: Alessandro AgnoliRelatore: Prof. Luca Schenato
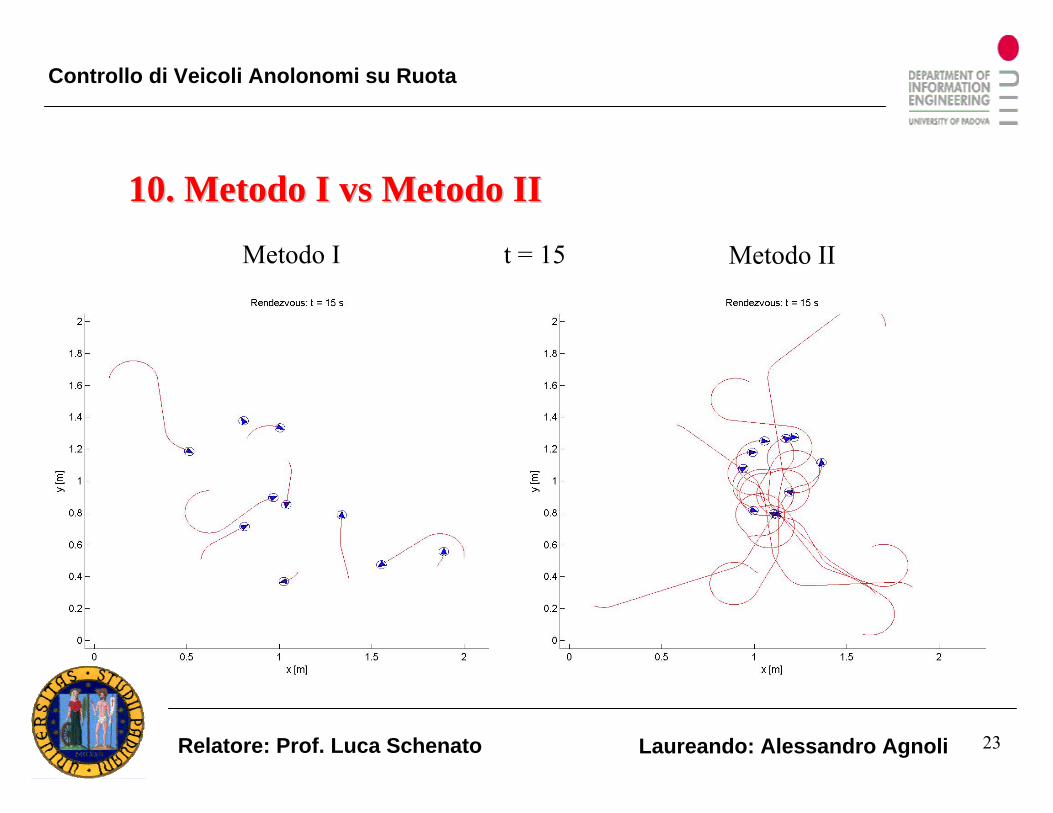
Metodo I Metodo IIt = 15
10. Metodo I vs Metodo II10. Metodo I vs Metodo II

24
Controllo di Veicoli Anolonomi su Ruota
Laureando: Alessandro AgnoliRelatore: Prof. Luca Schenato
Metodo I Metodo IIt = 50
10. Metodo I vs Metodo II10. Metodo I vs Metodo II
25
Controllo di Veicoli Anolonomi su Ruota
Laureando: Alessandro AgnoliRelatore: Prof. Luca Schenato
Metodo I Metodo IIt = 100
10. Metodo I vs Metodo II10. Metodo I vs Metodo II
26
Controllo di Veicoli Anolonomi su Ruota
Laureando: Alessandro AgnoliRelatore: Prof. Luca Schenato
Metodo I Metodo IIt = 150
10. Metodo I vs Metodo II10. Metodo I vs Metodo II
27
Controllo di Veicoli Anolonomi su Ruota
Laureando: Alessandro AgnoliRelatore: Prof. Luca Schenato
Metodo I Metodo IIt = 200
10. Metodo I vs Metodo II10. Metodo I vs Metodo II

28
A) Controllo di un singolo veicoloLa quantizzazione del controllo può essere applicata a veicoli di Dubins,
garantendo prestazioni ottime senza la risoluzione esplicita di alcun problema di minimizzazione.
B) Rendezvous di più veicoliLa convergenza a un punto di veicoli di Dubins asincroni in moto
simultaneo pare difficilmente perseguibile senza il raggiungimento di un preventivo consenso sul punto di rendezvous
Il Metodo II pare una soluzione rapida e robusta se è sufficiente condurre i veicoli in un intorno di raggio confrontabile con quello di minima curvatura
Controllo di Veicoli Anolonomi su Ruota
Laureando: Alessandro AgnoliRelatore: Prof. Luca Schenato
11. Conclusioni11. Conclusioni


















