
Controle Programável de Guindaste Inteligente CPGI · joystick, onde um operador humano...
8
I SBAI - UNESP - Rio Claro/SP - Brasil Controle Programável de Guindaste Inteligente CPGI Aldo Zischler Graduando do Curso de Engenharia da Computação - PUC-PR *Estagiário no Laboratório de Desenvolvimento - Divisão Eletro-Eletrônica Emerson Cabrera Paraiso Graduando do Curso de Engenharia da Computação - PUC-PR *Estagiário no Laboratório de Desenvolvimento - Divisão Eletro-Eletrônica Josué Soares Rocha Graduando do Curso de Engenharia da Computação - PUC-PR Instrutor da divisão de Eletrônica do SENAI - CTBA Prof. Celso A. A. Kaestner Departamento de Informática PUC-PRlCEFET-PR Resumo Este artigo descreve um controle de guindaste inteligente. Foram projetados e implementados um controle digital para acionamento dos motores que efetuam o movimento do guindaste. Além disto está um fase de desenvolvimento um sistema especialista para o planejamento do movimento do guindaste. A finalidade do sistema especialista é permitir que regras sejam interpretadas e convertidas em movimento. Para tanto está sendo desenvolvido uma máquina de inferência de esquema misto, que faça a interpretação de um conjunto de regras genérico. Para validação deste sistema foram implementados dois problemas clássicos de inteligência artificial: Mundo de Blocos e Torres de Hanói. O sistema especialista está sendo construído em Lisp e este será anexado as demais funções de controle já implementadas em C e Assembly. *Instituto de Tecnologia do Paraná Rua Prof. Algacyr Munhoz Mader, 2400 - CIC - tel: (041) 346-3141 - FAX:(041) 247-6788 Curitiba - Paraná email: TECPAR @ brfapesp.bitnet - 78-
Transcript of Controle Programável de Guindaste Inteligente CPGI · joystick, onde um operador humano...

I SBAI - UNESP - Rio Claro/SP - Brasil
Controle Programável de Guindaste Inteligente
CPGI
Aldo Zischler Graduando do Curso de Engenharia da Computação - PUC-PR *Estagiário no Laboratório de Desenvolvimento - Divisão Eletro-Eletrônica
Emerson Cabrera Paraiso Graduando do Curso de Engenharia da Computação - PUC-PR *Estagiário no Laboratório de Desenvolvimento - Divisão Eletro-Eletrônica
Josué Soares Rocha Graduando do Curso de Engenharia da Computação - PUC-PR Instrutor da divisão de Eletrônica do SENAI - CTBA
Prof. Celso A. A. Kaestner Departamento de Informática PUC-PRlCEFET-PR
Resumo
Este artigo descreve um controle de guindaste inteligente. Foram projetados e implementados um controle digital para acionamento dos motores que efetuam o movimento do guindaste. Além disto está um fase de desenvolvimento um sistema especialista para o planejamento do movimento do guindaste.
A finalidade do sistema especialista é permitir que regras sejam interpretadas e convertidas em movimento. Para tanto está sendo desenvolvido uma máquina de inferência de esquema misto, que faça a interpretação de um conjunto de regras genérico.
Para validação deste sistema foram implementados dois problemas clássicos de inteligência artificial : Mundo de Blocos e Torres de Hanói .
O sistema especialista está sendo construído em Lisp e este será anexado as demais funções de controle já implementadas em C e Assembly.
*Instituto de Tecnologia do Paraná Rua Prof. Algacyr Munhoz Mader, 2400 - CIC - tel : (041) 346-3141 - FAX:(041) 247-6788 Curitiba - Paraná email: TECPAR @ brfapesp.bitnet
- 78-
I SBAI - UNESP - Rio Claro/SP - Brasil
Introdução
Este artigo tem por fmalidade descrever um sistema de controle de guindaste inteligente referenciado a partir de agora por CPGI. Este sistema controla um guindaste para o transporte de peças metálicas.
A proposta deste sistema é construir um controle digital e uma interface para um sistema especialista que oriente sua movimentação, sendo utilizado como equipamento alvo, um guindaste. Para validação do sistema, construímos, além do software e hardware de controle, um guindaste em escala.
O sistema divide-se um duas partes distintas: - um controle digital - um sistema especialista.
A seguir tem-se uma descrição de cada uma destas partes .
Controle Digital
O módulo Controle Digital contém quatro sub-módulos plincipais, que interagem entre si, sendo eles:
- o primeiro sub-módulo trata-se de um ambiente amigável, onde o usuano do sistema terá controle de sua operação, podendo: catalogar pontos de carga e descarga do guindaste, previsão de obstáculos, velocidade do guindaste, melhor caminho, visualização dos movimentos, automação do movimento, e acesso ao sistema especialista, entre outros. Este sub-módulo, poderá ser substituído, por exemplo, por um joystick, onde um operador humano controlaria o movimento do guindaste.
- o segundo sub-módulo é um circuito digital microcontrolado que é o responsável pelo controle numérico do mecanismo de movimento, além da verificação da integridade e resposta do sistema mecânico e elétrico. Foi escolhido o microcontrolador 8031 da Intel, pois é um chip relativamente barato e de qual obtivemos informações abundantes.
- o terceiro sub-módulo interage com o segundo e transforma sinais digitais em analógicos utilizados nos motores, e ainda converte sinais analógicos do tacogerador e fotosensores para sinais digitais repassando-os ao segundo módulo. Este módulo foi construído pois para validação do controle, estamos utilizando 2 motores Cc.
- o quarto e último sub-módulo é o sistema mecânico do guindaste propriamente dito. É composto de uma tOlTe, um braço, um eletroímã, dois motores CC e engrenagens. Este braço ou guindaste propriamente dito, foi construído parte em madeira e, para um perfeito movimento, utilizamos unl rolamento, além de engrenagens iguais as utilizadas em relógios de corda.
- 79-

I SBAI - UNESP - Rio Claro/SP - Brasil
Especificação do Sistema de Controle
- O sistema de controle para um guindaste tem como objetivo, utilizando uma interface padrão RS-232C, movimentar um guindaste nos vários sentidos necessários ao transporte de peças metálicas. Assim o controle interagirá com o usuário do sistema através da porta serial de comunicação RS-232C, enviando e recebendo dados para o per feito movimento do guindaste. Este sistema possui ainda um software adicional de alto rnvel para interação de um usuário humano com o controle do guindaste. Através deste software o usuário pode passar comandos ao CPGI, tais como: coordenadas de movimento, velocidade do guindaste, etc.
Para a utilização deste controle, o usuário deverá possuir um guindaste compatível, além da fonte de alimentação do controle (uma fonte 5V). Caso o usuário não tenha um sistema computacional para a execução do software oferecido, a interação com o CPGI poderá ser realizada por qualquer dispositivo que utilize o padrão RS-232C e que seja capaz de intetfacear dados no fOlmato do CPGI. Este fOlmato de dados será descrito em outros tópicos.
A validação do controle do guindaste será feita através da perfeita operação do guindaste, ou seja, o transporte das peças metálicas do ponto de partida ao ponto de chegada indicado pelo usuário.
Para a implementação do controle utilizou-se normas da ISO de comunicação para o padrão RS-232C e o protocolo de comunicação escolhido foi o Kermit.
Pode-se destacar que o sistema terá uma grande utilidade, já que otimiza a operação de um guindaste, aumentando a confiabilidade dos resultados gerados. Para isto o controle é capaz de tratar condições adversas de operação na interação com o ambiente. É capaz de tratar por si próprio, problemas tais como:
- ruído; - travamento mecânico; - inadequação dos dados vindos do usuário; - e outros;
O controle possui também uma tabela de erros. Através dela, o controle, detectado um erro, infOlma ao sistema que o gerência (por exemplo o software de alto nível fornecido) qual o erro que ocorreu. Cabe assim ao gerenciador, providenciar a solução do problema.
Sendo o CPGI dividido em módulos, a medida que haja a necessidade de uma evolução do sistema como um todo, não ocorrerá maiores problemas de evolução do controle para novas situações ou nova família de guindastes.
Por todos estes aspectos o sistema toma-se amplamente rentável, não somente pelas suas características de qualidade, mas principalmente pela essência de sua função que é exatamente a de controlar o movimento de um guindaste.
- 80-

I SBAI - UNESP - Rio Claro/SP - Brasil
Implementação
A seguir daremos uma descrição do projeto e implementação dos módulos necessários ao CPGI. Estão descritos a seguir os ítens necessários a compreensão dos módulos de controle do sistema.
Foram utilizados como ferramentas de representação e desenvolvimento diagramas de Fluxo de Dados. Com a utilização de DFD's tem-se uma visão gráfica da interação entre os módulos e suas partes funcionais .
Usuário Controle Guindaste
J Sistema
Especialista
Figura 1
Na figma I tem-se o nível O do CPGI. Na figma 2, o controle foi dividido em 3 grandes módulos:
- software de alto nível para interação com o usuário - controle digitallPrograma - circuito de potência
Controle
I Usuário I Software
Controle Guindaste I Digital
Figura 2
- 81 -

I SBAI - UNESP - Rio Claro/SP - Brasil
Na figura 3, o controle é ampliado em controle digital, conversor de sinais e programa. O conversor de sinais converte sinais analógicos que são trazidos do tacogerador do motor CC que movimenta o guindaste, para sinais digitais lidos e analisados pelo controle digital. O conversor também converterá sinais digitais para analógicos, na medida em que o controle digital passar dados para o movimento do guindaste.
Controle
Software Controle Conversor
Guindaste Digital de Sinais
t Programa
Figura 3
Na figura 4, o controle digital é especificado como tendo uma interface com o usuário, um módulo de processamento de dados, uma interface com o conversor de sinais e uma interface com o programa de controle. A interface nada mais é que a troca de mensagens entre o usuário (no caso o software de alto nível) e o controle do sistema, através do protocolo de comunicação Kermit, utilizando como canal a porta RS-232C.
Controle Digital
Interface Processamento Interface com Software f--~ com o --- de --- o Converssor
Usuário Dados de Sinais
Programa
Figura 4
- 82 -
I SBAI - UNESP - Rio Claro/SP - Brasil
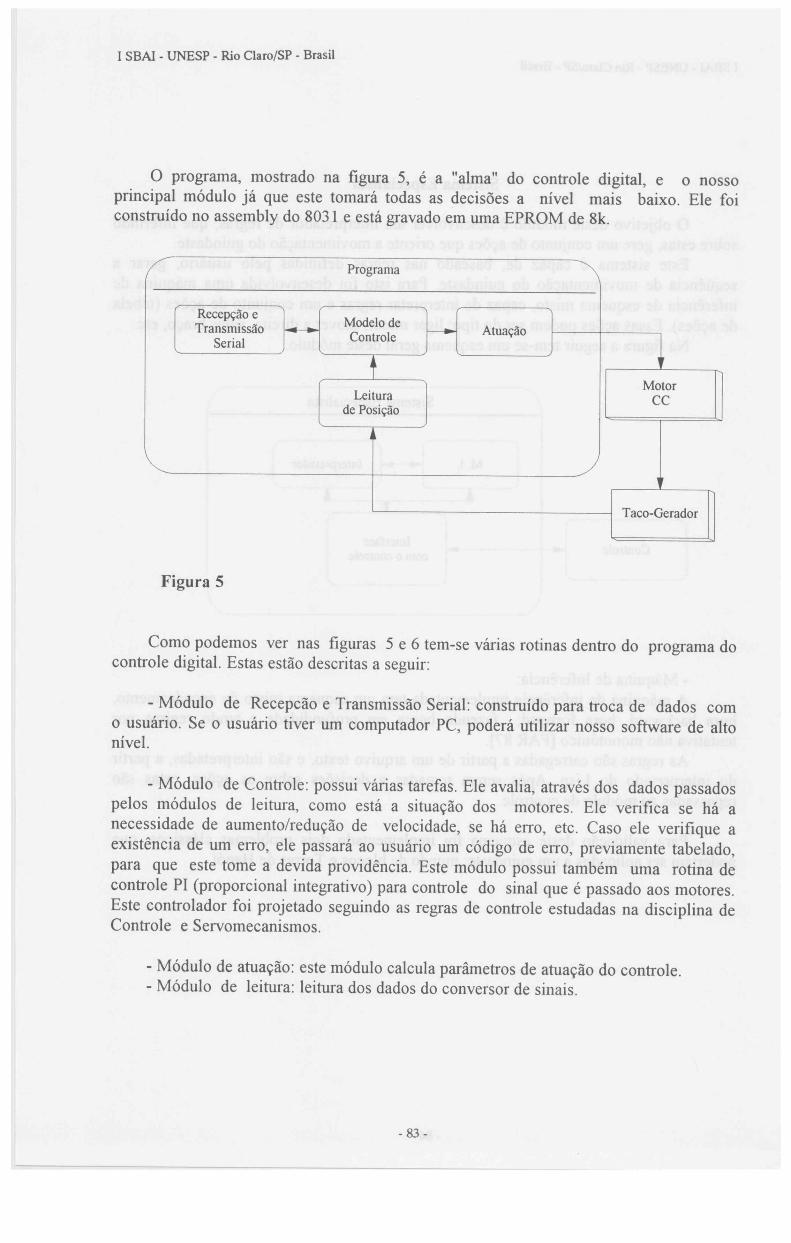
o programa, mostrado na figura 5, é a "alma" do controle digital, e o nosso principal módulo já que este tomará todas as decisões a nível mais baixo. Ele foi construído no assembly do 8031 e está gravado em uma EPROM de 8k.
Programa
Recepção e Modelo de
Transmissão ~ Controle I---- Atuação
i Serial
Motor Leitura CC
de Posição
Taco-Gerador
Figura 5
Como podemos ver nas figuras 5 e 6 tem-se várias rotinas dentro do programa do controle digital. Estas estão descritas a seguir:
- Módulo de Recepcão e Transmissão Serial: construído para troca de dados com o usuário. Se o usuário tiver um computador PC, poderá utilizar nosso software de alto nível.
- Módulo de Controle: possui váIias tarefas. Ele avalia, através dos dados passados pelos módulos de leitura, como está a situação dos motores. Ele verifica se há a necessidade de aumentolredução de velocidade, se há erro, etc. Caso ele verifique a existência de um erro, ele passará ao usuário um código de eITO, previamente tabelado, para que este tome a devida providência. Este módulo possui também uma rotina de controle PI (proporcional integrativo) para controle do sinal que é passado aos motores. Este controlador foi projetado seguindo as regras de controle estudadas na disciplina de Controle e Servomecanismos.
- Módulo de atuação: este módulo calcula parâmetros de atuação do controle. - Módulo de leitura: leitura dos dados do conversor de sinais.
- 83-
------- --- ----------------------------------------
I SBAI - UNESP - Rio Claro/SP - Brasil
Sistema Especialista
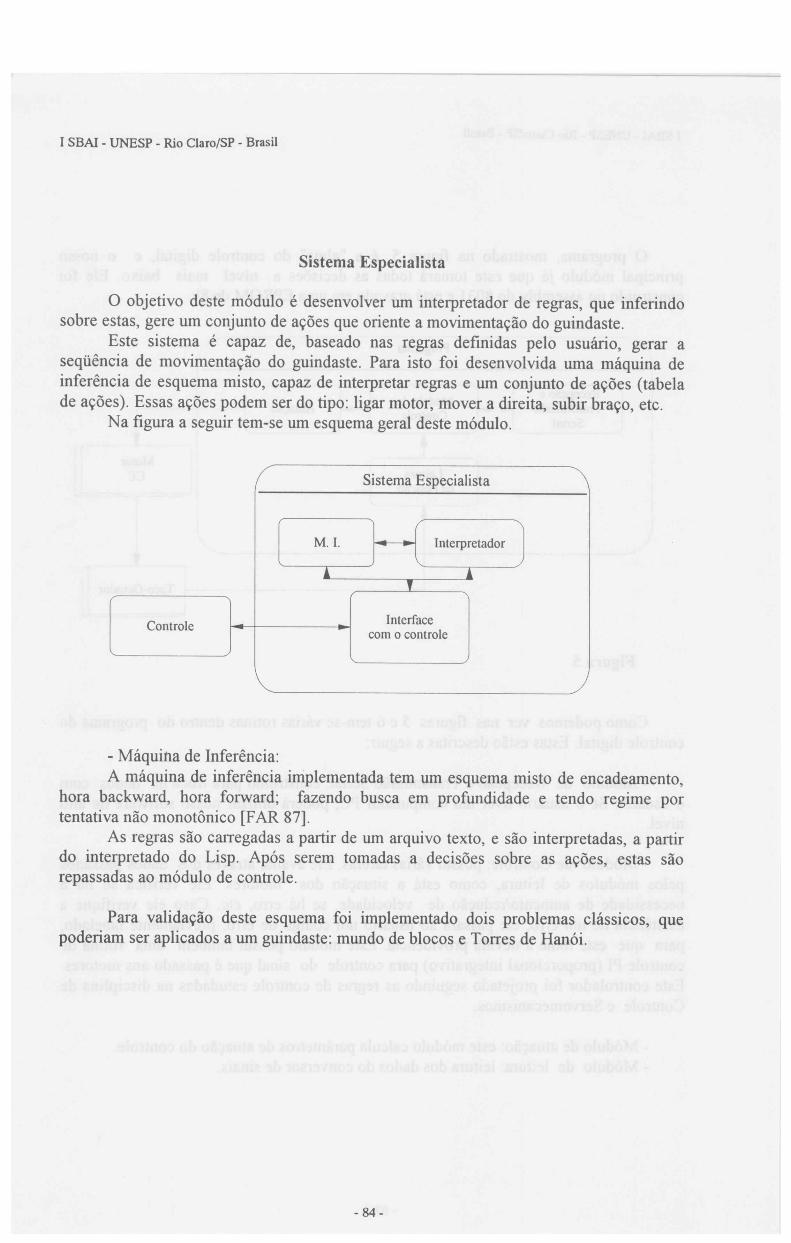
o objetivo deste módulo é desenvolver um interpretador de regras, que inferindo sobre estas, gere um conjunto de ações que oriente a movimentação do guindaste.
Este sistema é capaz de, baseado nas regras deftnidas pelo usuário, gerar a seqüência de movimentação do guindaste. Para isto foi desenvolvida uma máquina de inferência de esquema misto, capaz de interpretar regras e um conjunto de ações (tabela de ações). Essas ações podem ser do tipo: ligar motor, mover a direita, subir braço, etc.
Na ftgura a seguir tem-se um esquema geral deste módulo.
Sistema Especialista
M. I. Interpretador
i i , Controle Interface
com o controle
- Máquina de Inferência: A máquina de inferência implementada tem um esquema misto de encadeamento,
hora backward, hora forward; fazendo busca em profundidade e tendo regime por tentativa não monotônico [F AR 87].
As regras são calTegadas a partir de um arquivo texto, e são interpretadas, a partir do interpretado do Lisp. Após serem tomadas a decisões sobre as ações, estas são repassadas ao módulo de controle.
Para validação deste esquema foi implementado dois problemas clássicos, que poderiam ser aplicados a um guindaste: mundo de blocos e TOlTes de Hanói.
- 84-

I SBAI - UNESP - Rio Claro/SP - Brasil
Estimativa de Custos
Neste sistema o custo total é muito pequeno comparado ao seu beneficio. Podemos destacar como mais caro no projeto o microcontrolador 8031, crs de memória, e uma fonte de alimentação.
A construção do guinda~te para validação do sistema, não encareceu o custo fmal do ·protótipo pois foi construído em madeira nos próprios laboratórios da PUC-PR, sem a necessidade da compra de nenhum material.
Conclusões e Validação
Como validação do sistema de controle, foi construído um guindaste em madeira, e com ele pudemos aprimorar o controle. Porém uma prova defmitiva deste sistema seria colocá-lo em funcionamento num ambiente real, onde ele tivesse a oportunidade de controlar um grande equipamento, de forma automatizada e essencialmente segura.
Agradecimentos
Os autores deste trabalho gostariam de agradecer ao engenheiro Milton P. Ramos, chefe do Lab. de Desenvolvimento da Divisão Eletro-Eletrônica do TECP AR, pelo apoio técnico na confecção deste artigo. Também destaca-se a cooperação do Prof. Dewey, chefe do departamento de Bacharelado em Informática da PUCIPR.
Bibliografia
[FAR 87] - Farreny, H. e GhaIlab, M .. Éléments d'InteIligence Artificielle. Hermes. Paris - 1987
- 85-


















