Control of Spacecraft Swarms Oct 01

of 21
-
Upload
clifford-stone -
Category
Documents
-
view
228 -
download
0
Transcript of Control of Spacecraft Swarms Oct 01
-
8/11/2019 Control of Spacecraft Swarms Oct 01
1/21
Advanced Space Propulsion LaboratoryAdvanced Space Propulsion LaboratoryAdvanced Space Propulsion LaboratoryAdvanced Space Propulsion Laboratory
Control of Spacecraft Swarms UsingCoulomb Forces
Lyon B. KingGordon G. Parker
Jer-Hong Chong
Satwik Deshmukh
Department of Mechanical Engineering
This research made possible through funding from the
NASA Institute for Advanced Concepts
-
8/11/2019 Control of Spacecraft Swarms Oct 01
2/21
Advanced Space Propulsion LaboratoryAdvanced Space Propulsion LaboratoryAdvanced Space Propulsion LaboratoryAdvanced Space Propulsion Laboratory
Motivation: Coulomb Clusters
How to build a tractor beam
Without gravitons
Ions in 1/r2 confining potential
form stable crystal formations
What would charged spacecraft
do in a gravity potential?
Laser-cooled trapped ion research at NIST
-
8/11/2019 Control of Spacecraft Swarms Oct 01
3/21
Advanced Space Propulsion LaboratoryAdvanced Space Propulsion LaboratoryAdvanced Space Propulsion LaboratoryAdvanced Space Propulsion Laboratory
Presentation Overview
Introduction to formation flying
Space-based imaging and interferometry
Formation propulsion requirements
Spacecraft charging as control force
Coulomb force metrics
Coulomb formation orbital dynamics
-
8/11/2019 Control of Spacecraft Swarms Oct 01
4/21
-
8/11/2019 Control of Spacecraft Swarms Oct 01
5/21
Advanced Space Propulsion LaboratoryAdvanced Space Propulsion LaboratoryAdvanced Space Propulsion LaboratoryAdvanced Space Propulsion Laboratory
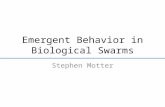
Interferometry Basics
Spatial frequencies in the image are given by u,v points
Each unique physical separation yields amplitude at one u,v point
(x1,y1)
(x2,y2) d
Two Spacecraft
In physical plane
y
x (u1,v1) u
v
Single amplitude
In Fourier plane
u = x2-x1/
v = y2-y1/
Inverting Spatial Frequency Spatial Amplitude Image
To perform the inversion we need to fill the u,v plane
-
8/11/2019 Control of Spacecraft Swarms Oct 01
6/21
3 Spacecraft
7 Spacecraft
9 Spacecraft
11 Spacecraft
5 Spacecraft
Physical
Plane
Fourier
Plane Finite apertures can fill-in
Holes in u-v plane
Consider single aperture
As array of sub-apertures
(xi, yi)
Kong, E.M., Optimal Trajectories and Orbit Design for Separated
Spacecraft Interferometry, Masters Thesis, MIT Dept. of Aeronautics
and Astronautics, November, 1998.
Cornwell, T.J., A Novel Principle for Optimization of the Instantaneous
Fourier Plane Coverage of Correlation Arrays, IEEE Trans. On Antennas
and Propagation, Vol. 36, No. 8, 1165-1167.
-
8/11/2019 Control of Spacecraft Swarms Oct 01
7/21
Advanced Space Propulsion LaboratoryAdvanced Space Propulsion LaboratoryAdvanced Space Propulsion LaboratoryAdvanced Space Propulsion Laboratory
Interferometry for Formations
(xi, yi)
(xj, yj)d
All separations (u,v points) less
Than d are covered by a single aperture
Separations (u,v points) greater than d
Must come from separated spacecraft
> d
Implication:
To provide seamless u,v coverage spacecraft must fly
within close proximity (~ d) of each other
-
8/11/2019 Control of Spacecraft Swarms Oct 01
8/21
Advanced Space Propulsion LaboratoryAdvanced Space Propulsion LaboratoryAdvanced Space Propulsion LaboratoryAdvanced Space Propulsion Laboratory
Formation Flying Introduction
Optimal imaging configurations yield non-optimal orbital trajectories
Inertial Orbit
Non-inertial Orbit
Non-inertial Orbit
Rigid Formation
Requires constant thrust
Good imaging properties
Time-varying position
About center satellite
Family of inertial orbits
Dynamic Formation
Thrust only for error correction
Complicated imaging
-
8/11/2019 Control of Spacecraft Swarms Oct 01
9/21
Advanced Space Propulsion LaboratoryAdvanced Space Propulsion LaboratoryAdvanced Space Propulsion LaboratoryAdvanced Space Propulsion Laboratory
Propulsion Requirements
For rigid formation: 0... ===== yyx &&&&&&
zmF
xmF
z
x
2
23
=
= Fx ~ 16 NFz ~ 6 N
m = 100 kg
x, z ~ 10 m
zzm
F
xym
F
yxxm
F
z
y
x
2
2
2
23
+=
+=
=
&&
&&&
&&&
Hills Equations for Formation
= angular velocity (for GEO =7.3x10-5 rad/sec)Figure reprinted from Kong, E.M., Optimal Trajectories and Orbit Design for SeparatedSpacecraft Interferometry, Masters Thesis, MIT Dept. of Aeronauticsand Astronautics, November, 1998.
-
8/11/2019 Control of Spacecraft Swarms Oct 01
10/21
Advanced Space Propulsion LaboratoryAdvanced Space Propulsion LaboratoryAdvanced Space Propulsion LaboratoryAdvanced Space Propulsion Laboratory
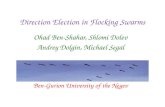
Coulomb Control Forces
Engineering throttleable thrusters for 10 N is tough Current candidates (FEEP, Colloid) exhaust contaminants
Collisions are of paramount concern
Is there a better way to control the formation? YES!Maybe!
10-6
10-5
10-4
10-3
Coulomb
Force(N)
70605040302010
Spacecraft Separation (m)
6 kV8 kV10 kV
If the plasma Debye length is larger
than spacecraft separation, Coulomb
forces could be used
12
d
Spacecraft 1 at
Voltage Vsc1
Spacecraft 2 at
Voltage Vsc2
Vsc1 = Vsc2Spacecraft radius = 1 m
GEO plasma conditions
=
d
scsc
o
d
d
VVrrF
exp4
2
2121
2,1
-
8/11/2019 Control of Spacecraft Swarms Oct 01
11/21
-
8/11/2019 Control of Spacecraft Swarms Oct 01
12/21
Advanced Space Propulsion LaboratoryAdvanced Space Propulsion LaboratoryAdvanced Space Propulsion LaboratoryAdvanced Space Propulsion Laboratory
Electron emission drives Vscpositive
Ion emission drives Vsc negative
Spacecraft potential control is naturally stable
Spacecraft Charge Control
+ +
+
+
Vcontrol
Vspacecraft
V
xVplasma (Gods ground)
V
xVplasma (Gods ground)
Vspacecraft
Vcontrol+
+
+
V
xVplasma (Gods ground)
Vcontrol
Vspacecraft
+ +
When Vsc = Vcontrol the emission
Current is returned (Icontrol
= 0)
Vcontrol
+
-
8/11/2019 Control of Spacecraft Swarms Oct 01
13/21
r4
2exp
2r4I
C
I
dt
dV
0
2
1
2
1
2
control
sc
+
==
phw
i
iBi
eB
sc
e
eBe Ie
m
Tken
Tk
eV
m
Tken
1-m-radius spacecraft charging analysis
for average GEO plasma environment
0
500
1000
1500
2000
2500
3000
0.00001 0.0001 0.001 0.01 0.1
Time (sec)
SpacecraftPotential
(Volts)
P = 0.1 W
P = 1 WP = 10 W
controlcontrol V
PI =
-
8/11/2019 Control of Spacecraft Swarms Oct 01
14/21
Advanced Space Propulsion LaboratoryAdvanced Space Propulsion LaboratoryAdvanced Space Propulsion LaboratoryAdvanced Space Propulsion Laboratory
1
2
22
22
control
TotaloCoulomb
Id
PrF
=
sp
TotalThruster
gI
PF
2
=
d
FCoulomb
FCoulomb
1
2
FThruster
FThruster
Coulomb
Control
Thruster
Control
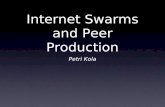
Coulomb vs. Electric Propulsion
103
104
105
106
107
FCoulomb
/FThrusteratequivalentp
ower
70605040302010
Spacecraft Separation (m)
1 mWatt
10 mWatts100 mWatts1000 mWatts
Comparison of Coulomb Control for 1-m-radius
Spacecraft in average GEO plasma with FEEP
Thruster technology (Isp = 10,000 sec, = 0.65)
-
8/11/2019 Control of Spacecraft Swarms Oct 01
15/21
Advanced Space Propulsion LaboratoryAdvanced Space Propulsion LaboratoryAdvanced Space Propulsion LaboratoryAdvanced Space Propulsion Laboratory
0.0280.0500.1860.00683TOTAL PROPULSION
SYSTEM MASS (kg)
0.0240.0050.0970.0068INERT MASS (kg)
0.11250.2160.370.22MASS/POWER
RATIO (kg/W)
0.2090.0210.2610.031INPUT POWER (W)
0.0040.0450.0890.00003
(using H2
for
Ion source)
MASS OF FUEL FOR
10 YEARS (kg)
0.650.650.0260.65EFFICIENCY
1000010005001 x 107SPECIFIC
IMPULSE (sec)
FEEPCOLLOID
THRUSTER
MICROPPTCOULOMB
CONTROL
MEANS OF
CONTROL
Mission design parameters for two-spacecraft flying in
20-m formation (located on Hills z-axis)
gm
FIsp
&=
-
8/11/2019 Control of Spacecraft Swarms Oct 01
16/21
Advanced Space Propulsion LaboratoryAdvanced Space Propulsion LaboratoryAdvanced Space Propulsion LaboratoryAdvanced Space Propulsion Laboratory
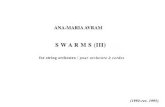
Coulomb Orbit Dynamics
Do formations exist for forces acting only along position vectors?
Figure reprinted from Kong, E.M., Optimal Trajectories and Orbit Design for Separated
Spacecraft Interferometry, Masters Thesis, MIT Dept. of Aeronautics
and Astronautics, November, 1998.
x
z
y
x
z
y
x
z
y
Along-track
leader-follower
Zenith-nadir
Coulomb tether Z-axis stack
3-spacecraft formations considered
3 canonical orientations
Hills equations for relative motion
GEO orbit with 10-m separation
-
8/11/2019 Control of Spacecraft Swarms Oct 01
17/21
Advanced Space Propulsion LaboratoryAdvanced Space Propulsion LaboratoryAdvanced Space Propulsion LaboratoryAdvanced Space Propulsion Laboratory
3-Spacecraft Orbital Analysis
Equilibrium solutions to Hills equations
o
scsc
sc
osc
qrV
r
qV
4
4
1
=
=
x
z
y
x z
y
x z
y
Along-trackleader-follower
Zenith-nadirCoulomb tether
Z-axis stack
02
1
0
1
20
1
2
Parameter Vscr is like equivalent charge:
-
8/11/2019 Control of Spacecraft Swarms Oct 01
18/21
x
y
z
10 m
10 m
Spacecraft 1
Spacecraft 3
Spacecraft 2
Spacecraft 4
Spacecraft 0
4 collector + 1 combiner
Imaging configuration
-
8/11/2019 Control of Spacecraft Swarms Oct 01
19/21
Advanced Space Propulsion LaboratoryAdvanced Space Propulsion LaboratoryAdvanced Space Propulsion LaboratoryAdvanced Space Propulsion Laboratory
5-Spacecraft Formation
1
2
3
4
0 Special case of 3-spacecraft z stack
Vehicle 2 and 4 remain neutral
Solution Family 1
-
8/11/2019 Control of Spacecraft Swarms Oct 01
20/21
Advanced Space Propulsion LaboratoryAdvanced Space Propulsion LaboratoryAdvanced Space Propulsion LaboratoryAdvanced Space Propulsion Laboratory
1
2
3
4
0
5-Spacecraft Formation
Solution Family 2
Spacecraft 1 & 3
Spacecraft 0 All 5 Spacecraft charged
Minimum Vscr identified
-
8/11/2019 Control of Spacecraft Swarms Oct 01
21/21
Advanced Space Propulsion LaboratoryAdvanced Space Propulsion LaboratoryAdvanced Space Propulsion LaboratoryAdvanced Space Propulsion Laboratory
Phase I Summary
Conclusions
Coulomb forces comparable with best thrusters
Continuous force dither/variation is possible
Required charge control demonstrated as early as 1979 (SCATHA)
Rich family of orbital solutions possible
Particularly suited to Fizeau interferometry (visible GEO imager?)
Coulomb control works best where thrusters work worst => synergistic control
Coulomb control can help with collision avoidance
Even if Coulomb is not used for control
natural charging will be significant perturbation that must be addressed!
On-going tasks
Examine formations for stability
Develop dynamic simulation
Formulate control laws
Search for more complicated formation solutions
Perform vehicle sizing analysis for canonical mission