Construction and Motion control of a mobile robot using Visual Roadmap By: Harshad Sawhney Guide:...
21
Construction and Motion control of a mobile robot using Visual Roadmap By: Harshad Sawhney Guide: Dr. Amitabha Mukerjee 1
-
Upload
dayna-wright -
Category
Documents
-
view
222 -
download
1
Transcript of Construction and Motion control of a mobile robot using Visual Roadmap By: Harshad Sawhney Guide:...

1
Construction and Motion control of a mobile
robot using Visual Roadmap
By: Harshad SawhneyGuide: Dr. Amitabha Mukerjee

2
Objective
Source
Destination

3
Introduction
• Inspiration From Human Brain.• The roadmap approach, captures connectivity
of robot’s free space.• 3-DOF mobile robot constructed.

4
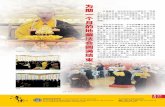
Construction Of Robot
• Major Components:
Microcontroller Arduino
Wireless module Xbee
Motor driver2 DC motors
Lithium-Ion battery
Image Source: robokits.co.in
Receives Data
UART communication

5
Camera Input
Image Processing
Wireless data transfer
Microcontroller receives
command
µC sends output
Robot Advances
Destination Reached
Flow Chart of Robot Navigation
NO
Stop
YES

6
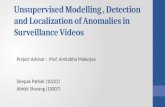
Image Pre-processing
• 10k images taken.• Background subtraction performed.• Parameters extracted - robot navigation.
Few images from dataset

7
Initial Image Background subtraction

8
Distance Metric Computation
• L2-norm expansion method.• Dist(X, Y) = sqrt(||X||2 + ||Y||2 - 2*||Y’X||)

9
Graph generation
• k-nearest neighbours calculated.• Robot location as nodes.• k=6 taken.• k=10 ; robot jumps larger distance.

10
Nearest nodes to some vertices

11
Shortest path calculation1. Without Obstacles: – Dijkstra’s algorithm used.
Shortest Path Graph

12
Shortest path calculation
1. With obstacles:– Obstacles image extracted.– Compared the image with the dataset.– Nodes and edges removed.– Reduced to no obstacles case.

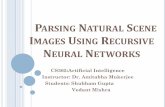
13
Obstacle Image
Image of environment with obstacles Obstacle image extraction

14
Shortest path calculation
Shortest Path Graph with obstacles in the environment

15
Robot Motion Control
• Feed the nodes.• Camera: Negative closed loop feedback
mechanism.• Reach till destination.• Real Time.

16
Algorithm for controlling robot
• (x, y, Ɵ): Robot current parameters• (x’, y’, Ɵ’): Node parameters• Ɵ : Robot vector angle.• Ɵ1 : Position of robot and node vector angle.
• Step1: Ƒ = | Ɵ - Ɵ1 |• Rotate till | Ƒ | < ɛ• Step 2: Move till | (x-x’)2+ (y-y’)2|< ɛ1

17
Algorithm for controlling robot
• Step 3: Align till | Ɵ - Ɵ’| < ɛ2
• Steps executed in increasing order of priority.• Thus, the camera provides negative feedback
closed loop system.

18
Results
• Robot accurately navigates.• Videos demonstrating robot navigation.

19
Challenges
• Distance metric computation: limits sampling density.
• Real time motion: possibly leading to collisions.

20
Future Work
• Dynamic obstacle avoidance• Update graph first time; use relative changes
in image for future considerations.

21
References
[1] Amitabha Mukerjee, M Seetha Ramaiah, Sadbodh Sharma, Arindam Chakraborty, “The Baby at One Month: Visuo-motor discovery in the infant robot".[2] Joshua B. Tenenbaum, Vin de Silva, John C. Langford, “A Global Geometric Framework for Nonlinear Dimensionality Reduction", 2000.[3] Jean-Claude Latombe, "Robot Motion Planning”, Edition en anglais. Springer, 1990.[4] Choset, Howie, Principles of robot motion: theory, algorithms, and implementations. MIT press, 2005.[5] Seth Hutchinson, Gregory D Hager, and Peter I Corke. A tutorial on visual servo control. Robotics and Automation, IEEE Transactions on, 12(5):651{670, 1996.