Conception d'un dispositif d'acquisition d'images agronomiques 3D ...
173
HAL Id: tel-00983327 https://tel.archives-ouvertes.fr/tel-00983327 Submitted on 25 Apr 2014 HAL is a multi-disciplinary open access archive for the deposit and dissemination of sci- entific research documents, whether they are pub- lished or not. The documents may come from teaching and research institutions in France or abroad, or from public or private research centers. L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des établissements d’enseignement et de recherche français ou étrangers, des laboratoires publics ou privés. Conception d’un dispositif d’acquisition d’images agronomiques 3D en extérieur et développement des traitements associés pour la détection et la reconnaissance de plantes et de maladies Bastien Billiot To cite this version: Bastien Billiot. Conception d’un dispositif d’acquisition d’images agronomiques 3D en extérieur et développement des traitements associés pour la détection et la reconnaissance de plantes et de maladies. Autre [cs.OH]. Université de Bourgogne, 2013. Français. <NNT: 2013DIJOS046>. <tel-00983327>
Transcript of Conception d'un dispositif d'acquisition d'images agronomiques 3D ...

HAL Id: tel-00983327https://tel.archives-ouvertes.fr/tel-00983327
Submitted on 25 Apr 2014
HAL is a multi-disciplinary open accessarchive for the deposit and dissemination of sci-entific research documents, whether they are pub-lished or not. The documents may come fromteaching and research institutions in France orabroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, estdestinée au dépôt et à la diffusion de documentsscientifiques de niveau recherche, publiés ou non,émanant des établissements d’enseignement et derecherche français ou étrangers, des laboratoirespublics ou privés.
Conception d’un dispositif d’acquisition d’imagesagronomiques 3D en extérieur et développement des
traitements associés pour la détection et lareconnaissance de plantes et de maladies
Bastien Billiot
To cite this version:Bastien Billiot. Conception d’un dispositif d’acquisition d’images agronomiques 3D en extérieur etdéveloppement des traitements associés pour la détection et la reconnaissance de plantes et de maladies.Autre [cs.OH]. Université de Bourgogne, 2013. Français. <NNT : 2013DIJOS046>. <tel-00983327>

Thèse de Doctorat
é c o l e d o c t o r a l e s c i e n c e s p o u r l ’ i n g é n i e u r e t m i c r o t e c h n i q u e s
U N I V E R S I T É D E B O U R G O G N E
Thèse présentée par
Bastien BILLIOT
Pour obtenir le titre de
Docteur de l’Université de Bourgogne
Spécialité: Instrumentation et Information de l’Image
Conception d’un dispositif d’acquisition d’imagesagronomiques 3D en extérieur et développement des
traitements associés pour la détection et lareconnaissance de plantes et de maladies
Thèse soutenue le 20 novembre 2013 devant le jury composé de
Frédéric Morain-Nicolier Professeur - Université de Reims Rapporteur
David Rousseau Professeur - Université de Lyon Rapporteur
Frédéric Baret Directeur de Recherches - INRA Avignon Examinateur
Mustapha Kardouchi Professeur - Université de Moncton Examinateur
Gabriel Bloch Directeur adjoint - Nicéphore Cité Examinateur
Pierre Gouton Professeur - Université de Bourgogne Directeur
Frédéric Cointault MCF-HDR - Agrosup Dijon Co-Directeur


Résumé
Dans le cadre de l’acquisition de l’information de profondeur de scènes tex-
turées, un processus d’estimation de la profondeur basé sur la méthode de
reconstruction 3D « Shape from Focus » est présenté dans ce manuscrit. Les
deux étapes fondamentales de cette approche sont l’acquisition de la séquence
d’images de la scène par sectionnement optique et l’évaluation de la netteté
locale pour chaque pixel des images acquises. Deux systèmes d’acquisition de
cette séquence d’images sont présentés ainsi que les traitements permettant
d’exploiter celle-ci pour la suite du processus d’estimation de la profondeur.
L’étape d’évaluation de la netteté des pixels passe par la comparaison des dif-
férents opérateurs de mesure de netteté. En plus des opérateurs usuels, deux
nouveaux opérateurs basés sur les descripteurs généralisés de Fourier sont
proposés. Une méthode nouvelle et originale de comparaison est développée
et permet une analyse approfondie de la robustesse à différents paramètres
des divers opérateurs. Afin de proposer une automatisation du processus de
reconstruction, deux méthodes d’évaluation automatique de la netteté sont
détaillées. Finalement, le processus complet de reconstruction est appliqué à
des scènes agronomiques, mais également à une problématique du domaine de
l’analyse de défaillances de circuits intégrés afin d’élargir les domaines d’uti-
lisation.
Mots clés : Reconstruction 3D ; Shape from Focus ; Mesure de netteté ; Des-
cripteurs généralisés de Fourier ; Evaluation de robustesse.
iii


Abstract
In the context of the acquisition of depth information for textured scenes, a
depth estimation process based on a 3D reconstruction method called "shape
from focus" is proposed in this thesis. The two crucial steps of this approach
are the image sequence acquisition of the scene by optical sectioning and the
local sharpness evaluation for each pixel of the acquired images. Two acquisi-
tion systems have been developed and are presented as well as different image
processing techniques that enable the image exploitation for the depth estima-
tion process. The pixel sharpness evaluation requires comparison of different
focus measure operators in order to determine the most appropriate ones. In
addition to the usual focus measure operators, two news operators based on
generalized Fourier descriptors are presented. A new and original compari-
son method is developped and provides a further analysis of the robustness
to various parameters of the focus measure operators. In order to provide
an automatic version of the reconstruction process, two automatic sharpness
evaluation methods are detailed. Finally, the whole reconstruction process
is applied to agronomic scenes, but also to a problematic in failure analysis
domain aiming to expand to other applications.
Keywords : 3D reconstruction ; Shape from Focus ; Focus measure ; Gener-
alized Fourier descriptors ; Robustness evaluation.
v


Remerciements
Bien que mener un doctorat demande beaucoup d’autonomie et d’investis-
sement, son accomplissement est, lui, dû à de multiples rencontres, échanges
et collaborations. C’est pourquoi je tiens à remercier dans cette partie les
personnes sans qui ces travaux n’auraient pas été tels qu’ils sont aujourd’hui.
Tout d’abord, un grand merci à Pierre Gouton et Frédéric Cointault, les
directeurs de ces travaux. Merci à toi, Pierre, pour la confiance que tu m’ac-
cordes maintenant depuis plusieurs années et bien avant ce doctorat mais
également pour tes qualités humaines et ton naturel. Merci Fred pour ton
soutien, ta disponibilité et tes nombreux conseils tout au long de ce projet.
Nos nombreux échanges tant professionnels qu’amicaux ont joué beaucoup
dans le plaisir que j’ai eu à mener ces recherches durant trois ans et proba-
blement dans nos futurs projets communs.
Je tiens à exprimer ma gratitude à David Rousseau et Frédéric Morain-
Nicolier d’avoir accepté d’être les rapporteurs de cette thèse. Leurs conseils
et questions m’ont permis de prendre du recul sur ce projet et d’en améliorer
le contenu. Merci à Frédéric Baret d’avoir accepté la présidence du jury de
soutenance et d’avoir examiné mes travaux, tout comme Gabriel Bloch et
Mustapha Kardouchi.
Merci beaucoup à mon cher ami expatrié en Thaïlande, Romuald, pour
toutes nos discussions plus orientées gastronomie que recherche la plupart
du temps, mais surtout pour tes conseils et remarques sur mes travaux. Ton
rôle de rapporteur et correcteur officieux m’a grandement aidé à améliorer ce
manuscrit.
vii

Remerciements
Je remercie vivement toutes les personnes qui ont contribué de près ou de
loin à ce doctorat. Je pense tout particulièrement à Samuel, notamment pour
l’application de mes travaux à ton domaine de recherche, Rachid et Christine
pour votre aide et vos conseils en statistique, Maxime pour tes corrections,
Jean-Claude pour mes débuts dans la peau d’un enseignant, Alex pour être
toujours disponible pour résoudre un problème informatique, Claude-Vivien
pour ton aide, Richard pour la partie conception et Patricia pour ton soutien
dans toute cette complexité administrative.
Merci également à tous mes collègues avec qui j’ai eu la chance de passer
ces trois années que ce soit à Agrosup ou à Nicéphore Cité. Avec un merci
particulier à Bilal, Sofija, Houda, Simeng, Marion, Lucile, Ludo, Fred Massart,
Benjamin, Isabelle, Vanessa, Jean-Claude et toutes les autres personnes que
je n’ai pas citées mais qui se reconnaitront.
Un remerciement particulier pour Tom, ami et compagnon d’infortune lors
de ces 3 années, qui a énormément contribué à rendre toutes ces journées
géniales. Cependant, je te remercie moins pour tous ces tests et retests de
restaurants qui ont entraîné une approche du quintal très préoccupante :-)
même si j’avoue avoir un peu participé aussi à toutes ces tentations. . .
Je remercie affectueusement l’ensemble de mes proches sans qui tout ceci
ne serait jamais arrivé. Merci donc à toute ma famille et mes amis d’être eux,
tout simplement, et de m’avoir toujours soutenu.
Enfin, comment ne pas remercier ma femme, Laurence, pour les années
passées et pour toutes celles à venir. Merci pour l’attention portée à mon
travail, ton amour et ton soutien sans faille dans tout ce que j’entreprends.
viii

Table des matières
Résumé iii
Abstract v
Remerciements vii
Table des matières ix
Table des figures xiii
Liste des tableaux xix
Introduction 1
Contexte et problématiques . . . . . . . . . . . . . . . . . . . . . . 1
Objectifs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
Contributions & structure de la thèse . . . . . . . . . . . . . . . . . 5
1 État de l’art 7
1.1 Généralités . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.2 Techniques non optiques . . . . . . . . . . . . . . . . . . . . . 10
1.2.1 Avec contact . . . . . . . . . . . . . . . . . . . . . . . . 10
1.2.1.1 CMMs . . . . . . . . . . . . . . . . . . . . . . 10
ix

TABLE DES MATIÈRES
1.2.1.2 Découpe . . . . . . . . . . . . . . . . . . . . . 11
1.2.2 Sans contact . . . . . . . . . . . . . . . . . . . . . . . . 12
1.2.2.1 CT-Scan . . . . . . . . . . . . . . . . . . . . . 12
1.2.2.2 IRM . . . . . . . . . . . . . . . . . . . . . . . 12
1.2.2.3 SONAR / RADAR . . . . . . . . . . . . . . . 13
1.3 Techniques optiques . . . . . . . . . . . . . . . . . . . . . . . . 13
1.3.1 Vision active . . . . . . . . . . . . . . . . . . . . . . . 13
1.3.1.1 Triangulation active . . . . . . . . . . . . . . 14
1.3.1.2 Télémétrie . . . . . . . . . . . . . . . . . . . . 19
1.3.2 Vision passive . . . . . . . . . . . . . . . . . . . . . . . 20
1.3.2.1 Triangulation passive . . . . . . . . . . . . . . 20
1.3.2.2 Shape from Texture . . . . . . . . . . . . . . 21
1.3.2.3 Shape from Shading . . . . . . . . . . . . . . 22
1.3.2.4 Shape from Motion . . . . . . . . . . . . . . . 23
1.3.2.5 Shape from Silhouette . . . . . . . . . . . . . 24
1.3.2.6 Shape from Defocus . . . . . . . . . . . . . . 24
1.3.2.7 Shape from Focus . . . . . . . . . . . . . . . 26
1.3.2.8 Confocal stereo . . . . . . . . . . . . . . . . . 28
1.3.2.9 Systèmes plénoptiques . . . . . . . . . . . . . 29
1.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2 Systèmes d’acquisition 33
2.1 Généralités optiques . . . . . . . . . . . . . . . . . . . . . . . 33
2.1.1 Formation géométrique des images . . . . . . . . . . . 34
2.1.2 Profondeur de champ . . . . . . . . . . . . . . . . . . . 38
2.1.3 Acquisition d’une séquence d’images . . . . . . . . . . 43
x

TABLE DES MATIÈRES
2.2 Système expérimental . . . . . . . . . . . . . . . . . . . . . . 44
2.2.1 Vue d’ensemble . . . . . . . . . . . . . . . . . . . . . . 44
2.2.2 Partie optique . . . . . . . . . . . . . . . . . . . . . . . 45
2.2.3 Partie électronique . . . . . . . . . . . . . . . . . . . . 47
2.2.4 Contraintes du système expérimental . . . . . . . . . . 51
2.3 Système final . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
2.4 Calibrage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
2.4.1 Correction des aberrations . . . . . . . . . . . . . . . . 54
2.4.2 Correction du grossissement . . . . . . . . . . . . . . . 57
2.4.3 Étalonnage de l’objectif motorisé . . . . . . . . . . . . 61
2.5 Procédure d’acquisition . . . . . . . . . . . . . . . . . . . . . . 63
2.6 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
3 Evaluation de la netteté 67
3.1 État de l’art des opérateurs de mesure de netteté . . . . . . . 69
3.1.1 Mesures différentielles . . . . . . . . . . . . . . . . . . 70
3.1.2 Mesures statistiques . . . . . . . . . . . . . . . . . . . 72
3.1.3 Mesures fréquentielles . . . . . . . . . . . . . . . . . . 73
3.1.4 Autres types de mesures . . . . . . . . . . . . . . . . . 74
3.2 Mesure de netteté basée sur les descripteurs généralisés de Fourier 75
3.3 Approximation . . . . . . . . . . . . . . . . . . . . . . . . . . 79
3.4 Comparaison . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
3.4.1 Méthodes de comparaison usuelles . . . . . . . . . . . . 80
3.4.2 Méthode de comparaison adaptée . . . . . . . . . . . . 82
3.4.3 Analyse du comportement des opérateurs . . . . . . . . 87
3.5 Evaluation automatique . . . . . . . . . . . . . . . . . . . . . 92
3.5.1 Méthode non supervisée par fusion d’opérateurs . . . . 92
xi

TABLE DES MATIÈRES
3.5.2 Méthode supervisée par analyse de variance . . . . . . 95
3.6 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
4 Applications 103
4.1 Application au dénombrement des épis de blé . . . . . . . . . 106
4.1.1 Acquisitions par le système expérimental . . . . . . . . 107
4.1.2 Acquisitions par le système final . . . . . . . . . . . . . 108
4.2 Application à l’étude de croissance de plante . . . . . . . . . . 114
4.3 Application à l’analyse de défaillances de circuits intégrés . . . 120
4.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
Conclusion générale et perspectives 127
Conclusion générale . . . . . . . . . . . . . . . . . . . . . . . . . . . 127
Perspectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
Publications 135
Annexe 137
Bibliographie 139
xii

Table des figures
0.0.1 Fonctions essentielles de la gestion optimisée de parcelles. . . 2
1.1.1 Classification des méthodes de reconstruction 3D. . . . . . . 9
1.2.1 Machine de mesure de coordonnées [AER, 2013]. . . . . . . . 11
1.3.1 Triangulation active par projection de point laser. . . . . . . 14
1.3.2 Triangulation active par projection de ligne laser. . . . . . . . 15
1.3.3 Motifs de projection basés sur le code binaire [Posdamer et
Altschuler, 1982]. . . . . . . . . . . . . . . . . . . . . . . . . 16
1.3.4 Motifs codés spatialement. a. De Bruijn [Pajes et Forest, 2004].
b. Codage M-arrays [Vuylsteke et Oosterlinck, 1990]. c. Co-
dage couleur [Pribanić et al., 2009]. d. Codage non formel
[Maruyama et Abe, 1993]. . . . . . . . . . . . . . . . . . . . . 18
1.3.5 Motifs codage direct. a. Codage direct niveau de gris [Carri-
hill et Hummel, 1985]. b. Codage direct couleur [Tajima et
Iwakawa, 1990]. . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.3.6 Shape from Texture. a. Image originale. b. Champ de nor-
males. c. Surface reconstruite à partir du champ de normales.
d. Carte de profondeur. [Clerc et Mallat, 2002]. . . . . . . . . 22
1.3.7 Principe d’acquisition « Shape from Motion ». . . . . . . . . 23
1.3.8 Schéma représentatif du « Visual Hull ». . . . . . . . . . . . . 25
1.3.9 Exemple de reconstruction 3D par « Shape from Defocus ».
[Favaro et Soatto, 2002] . . . . . . . . . . . . . . . . . . . . 26
xiii

TABLE DES FIGURES
1.3.10 Principe du « Shape from Focus ». . . . . . . . . . . . . . . . 27
1.3.11 Exemple de systèmes plénoptiques. a. Caméra Raytrix. b. Ap-
pareil Lytro. . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.1.1 Schéma d’un appareil sténopé. . . . . . . . . . . . . . . . . . 34
2.1.2 Loi de Snell-Descartes. . . . . . . . . . . . . . . . . . . . . . 35
2.1.3 Schéma de formation d’une image par une lentille mince conver-
gente. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
2.1.4 Schéma illustrant la profondeur de champ. . . . . . . . . . . 39
2.1.5 Exemples d’ouvertures relatives. . . . . . . . . . . . . . . . . 41
2.2.1 Schématisation du procédé d’acquisition. . . . . . . . . . . . 45
2.2.2 Ensemble constituant la partie optique. . . . . . . . . . . . . 46
2.2.3 Couple moteur nécessaire au module de guidage en fonction
de la charge axiale entrainée. . . . . . . . . . . . . . . . . . . 48
2.2.4 Vue d’ensemble du système. . . . . . . . . . . . . . . . . . . . 50
2.3.1 Objectif et caméra utilisés. . . . . . . . . . . . . . . . . . . . 53
2.4.1 Mire de calibrage et projection des positions utilisées. . . . . 56
2.4.2 Distorsions radiales des objectifs utilisés. . . . . . . . . . . . 57
2.4.3 Grossissement relatif en fonction de la focale et de la distance
de mise au point [Willson et Shafer, 1991]. . . . . . . . . . . 59
2.4.4 Schématisation du grossissement entre la 1ere et la nieme image.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
2.4.5 Distance de mise au point en fonction de la position du moteur. 62
2.4.6 Mesure de netteté pour la 1ere position moteur. . . . . . . . . 63
2.4.7 Profondeur de champ en fonction de la distance de mise au
point. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
3.0.1 Schéma du principe de mesure de netteté d’un pixel de la
séquence d’images. . . . . . . . . . . . . . . . . . . . . . . . 69
xiv

TABLE DES FIGURES
3.2.1 Schématisation de l’acquisition du descripteur généralisé de
Fourier. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
3.2.2 Obtention du vecteur des scores factoriels. . . . . . . . . . . . 78
3.3.1 Approximation gaussienne. . . . . . . . . . . . . . . . . . . 79
3.4.1 Effet des niveaux de bruit proposés par [Malik et Choi, 2008]
sur la valeur de corrélation entre l’image originale et l’image
bruitée. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
3.4.2 Effet de niveaux de bruit induisant une évolution constante
de la valeur de corrélation entre l’image originale et l’image
bruitée. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
3.4.3 Exemple de cartes de profondeur obtenues : a. Voisinage
64×64 sans bruit b. Voisinage 64×64 et bruit de 10%. . . . 85
3.4.4 Evolution de l’erreur en fonction des doublets de paramètres
(voisinage 64×64 et 4×4; bruit 0% et 20%). . . . . . . . . 88
3.4.5 Evolution de l’erreur en fonction des doublets de paramètres
(voisinage 64×64 et 8×8; bruit 0% et 10%). . . . . . . . . 89
3.5.1 Processus de fusion d’opérateurs de mesure de netteté. . . . 93
3.5.2 Courbe de mesure de netteté correspondant à la projection
des scores factoriels. . . . . . . . . . . . . . . . . . . . . . . 94
3.5.3 Courbe d’erreur moyenne minimale en fonction des doublets
de paramètres. . . . . . . . . . . . . . . . . . . . . . . . . . 99
4.0.1 Schéma fonctionnel du processus complet d’estimation de la
profondeur. . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
4.1.1 Extrait d’images de la séquence issue du système expérimen-
tal. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
4.1.2 Reconstruction 3D par le système expérimental. a. Carte de
profondeur. b. Image nette. c. Projection en fausses couleurs.
d. Projection avec placage de texture. . . . . . . . . . . . . 109
xv

TABLE DES FIGURES
4.1.3 Extrait d’images de la séquence d’épis de blé issue du système
final. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
4.1.4 Cartes de profondeur et projection 3D d’une scène d’épis de
blé pour un voisinage de 9 × 9 pixels. a. FMtenvar. b.
FMDGF som. c. FMentropy. . . . . . . . . . . . . . . . . . . . 112
4.1.5 Cartes de profondeur et projection 3D d’une scène d’épis de
blé pour un voisinage de 33 × 33 pixels. a. FMtenvar. b.
FMDGF som. c. FMentropy. . . . . . . . . . . . . . . . . . . . 113
4.1.6 Superposition de l’image nette à la carte de profondeur. a.
FMtenvar et voisinage 9×9. b. FMDGF som et voisinage 9×9.
c. FMentropy et voisinage 9 × 9. d. FMtenvar et voisinage
33 × 33. e. FMDGF som et voisinage 33 × 33. f. FMentropy et
voisinage 33×33. . . . . . . . . . . . . . . . . . . . . . . . . 115
4.2.1 Extrait d’images de la séquence de la plante Millepertuis issue
du système final. . . . . . . . . . . . . . . . . . . . . . . . . 116
4.2.2 Cartes de profondeur et projection 3D scène Millepertuis pour
un voisinage de 9 × 9 pixels. a. FMtenvar. b. FMDGF som. c.
FMentropy. . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
4.2.3 Cartes de profondeur et projection 3D scène Millepertuis pour
un voisinage de 33 × 33 pixels. a. FMtenvar. b. FMDGF som.
c. FMentropy. . . . . . . . . . . . . . . . . . . . . . . . . . . 118
4.2.4 Superposition de l’image nette à la carte de profondeur. a.
FMtenvar et voisinage 9×9. b. FMDGF som et voisinage 9×9.
c. FMentropy et voisinage 9 × 9. d. FMtenvar et voisinage
33 × 33. e. FMDGF som et voisinage 33 × 33. f. FMentropy et
voisinage 33×33. . . . . . . . . . . . . . . . . . . . . . . . . 119
4.3.1 Extrait d’images de la séquence du microcontrôleur. . . . . . 122
xvi

TABLE DES FIGURES
4.3.2 Images de profondeur de champ étendue d’une partie de mi-
crocontrôleur. a. FMtenvar et voisinage 9×9. b. FMDGF som
et voisinage 9×9. c. FMentropy et voisinage 9×9. d. FMtenvar
et voisinage 33 × 33. e. FMDGF som et voisinage 33 × 33. f.
FMentropy et voisinage 33×33. . . . . . . . . . . . . . . . . 123
4.4.1 Base de texture VisTex . . . . . . . . . . . . . . . . . . . . . 137
xvii


Liste des tableaux
2.1 Champ de vue (Largeur et Hauteur) et profondeur de champ
(PdC) en fonction du type d’objectif (valeurs en mm). . . . . 43
3.1 Matrice d’expériences, effets et interaction pour 2 niveaux de
paramètres. . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
3.2 Synthèse des résultats des plans d’expériences (voisinage 64×64 et 4×4; bruit 0% et 20%). . . . . . . . . . . . . . . . . . 88
3.3 Synthèse des résultats des plans d’expériences (voisinage 64×64 et 8×8; bruit 0% et 10%). . . . . . . . . . . . . . . . . . 89
3.4 Synthèse des groupes issus de l’analyse de variance.
Du meilleur groupe au moins bon : Bleu, Vert, Rouge, Orange,
Bleu clair, Noir, Blanc. . . . . . . . . . . . . . . . . . . . . . 97
3.5 Synthèse du groupe d’opérateurs les plus efficaces issus de
l’analyse de variance. . . . . . . . . . . . . . . . . . . . . . . 98
3.6 Groupes de doublets de comportement similaire. Les couleurs
identiques symbolisent les mêmes comportements. Le blanc
est utilisé pour les doublets n’appartenant à aucun groupe. . 100
3.7 Classement général des opérateurs de mesure de netteté (du
meilleur groupe A au moins bon F). . . . . . . . . . . . . . . 101
xix


Introduction
Contexte et problématiques
Initialement, la gestion des cultures était effectuée de manière globale, la
parcelle étant considérée homogène. Cependant, si cela était valable à une
époque où les parcelles agricoles étaient relativement petites et cultivées en
fonction des caractéristiques et de la richesse des sols, la taille toujours plus
importante des parcelles et les pressions environnementales ont entrainé une
remise en question de ce postulat. En effet, l’existence d’une variabilité intra-
parcellaire a permis la mise en évidence de la nature hétérogène des parcelles.
Dès lors, la gestion des parcelles nécessite la connaissance et la caractérisation
de celles-ci afin de tendre vers une culture optimale. Le besoin d’informations
nécessaire à une bonne caractérisation des parcelles a fait émerger le concept
d’agriculture de précision dans les années 90. L’objectif de cette nouvelle vision
de l’agriculture est une optimisation de la gestion d’une parcelle d’un point de
vue agronomique, environnemental et économique dans le but de fournir une
gestion sur mesure de chaque parcelle. Ceci permet, par exemple, de minimiser
les surdosages d’intrants (l’ensemble des produits n’étant pas présent dans le
sol naturellement comme les produits phytosanitaires et les engrais) entraînant
un gain économique (moins de produits utilisés), écologique (moins de pertes
par le sol) et sanitaire (moins de contact entre l’opérateur et les produits).
Une expression couramment utilisée et représentant très bien la philosophie
sous-jacente de l’agriculture de précision est : « la bonne intervention au bon
endroit et au bon moment » [Zwaenepoel et al., 1997]. Bien entendu, beau-
coup d’autres objectifs sont apparus au cours du temps avec l’évolution des
1

Introduction
moyens technologiques comme le suivi de l’évolution des cultures, l’évaluation
du rendement ou encore la détection de maladies et des infestations.
Afin de définir le concept de « précision », [McBratney, 2000] propose un
diagramme fonctionnel composé de 5 éléments essentiels (figure 0.0.1). Ses
travaux portent sur la viticulture de précision qui fait cependant partie inté-
grante de l’agriculture de précision au sens large.
Observation
Caractérisation
Préconisation
Application Géo
référencement
Figure 0.0.1: Fonctions essentielles de la gestion optimisée de parcelles.
Le géoréférencement constitue l’élément central permettant de lier l’en-
semble des autres fonctions à une même localisation. La partie observation
correspond à l’étape d’acquisition de données alimentant par la suite la fonc-
tion de caractérisation. Cette dernière permet de transformer ces données en
informations exploitables par un expert du domaine agronomique. Ces infor-
mations induisent ensuite des préconisations et conseils quant à la gestion de
la parcelle analysée. Tenant compte de ces conseils, l’opérateur peut adapter
sa gestion de parcelle comme, par exemple, appliquer un traitement propre à
une zone spécifique.
Un des outils s’étant rapidement imposé comme adapté aux problématiques
de l’agriculture de précision est la vision artificielle. Egalement appelée vision
par ordinateur, cette notion comprend l’ensemble des étapes permettant une
2

Contexte et problématiques
interprétation des images d’un objet ou d’une scène analysée. Cette étape
débute par l’acquisition de la scène par un capteur, son optique ainsi que
l’illuminant adapté. Puis vient le traitement des images éliminant l’informa-
tion inutile et mettant en évidence les données recherchées. Ces données sont
extraites des images par un processus d’analyse qui permet d’alimenter la
phase décisionnelle transformant ces données en informations utiles.
Naturellement, on retrouve une analogie entre ces processus de vision par
ordinateur et les étapes d’observation et caractérisation en agriculture de pré-
cision. Ainsi, ces étapes, autrefois réalisées visuellement et manuellement, sont
automatisées par le processus adapté en vision artificielle. La rapidité, la répé-
tabilité ainsi que l’objectivité liées à l’évaluation automatique de l’information
s’opposent aux aspects fastidieux et subjectifs de l’évaluation manuelle.
Parmi les procédés d’acquisition retenus en agriculture de précision, on dis-
tingue principalement deux types de vecteurs d’acquisition : la télédétection
et la proxidétection. Ces deux modes d’acquisition sont complémentaires en
agriculture de précision car les données acquises par leur biais sont souvent
différentes et les informations à obtenir également. Les systèmes de télédé-
tection tels que les satellites, avions ou, plus récemment, drones permettent
l’obtention de données à une échelle plus ou moins éloignée de la parcelle.
Ainsi, les informations extraites caractérisent la parcelle dans son ensemble
pour réaliser des cartographies. Ces dernières mettent en évidence la variabi-
lité existante au sein d’un champ comme, par exemple, les variations de types
de sols, l’état du couvert végétal, l’humidité des sols, le stress des plantes
cultivées ou encore l’identification du type de culture. Les systèmes de proxi-
détection, quant à eux, permettent une acquisition de données au plus près de
la plante afin de recueillir des données plus fines que celles obtenues par télé-
détection. Les avantages de ces systèmes sont multiples : meilleure résolution
d’images, meilleure temporalité (acquisition à la demande à n’importe quel
moment) mais accès simplifié et coût moindre. De tels systèmes s’orientent
principalement vers la détection de maladies, le suivi de croissance et l’étude
de la structure du couvert.
Depuis quelques années, l’agriculture de précision a connu une forte évo-
lution de ses procédés d’acquisition de données. Là où précédemment les ac-
3

Introduction
quisitions étaient réalisées essentiellement sur le terrain, la démocratisation
de la culture en environnement contrôlé a entrainé la conception de nouveaux
types d’outils de proxidétection : les plateformes de phénotypage. L’objectif
principal de ces plateformes est la caractérisation des phénotypes des plantes,
ceci afin d’établir le lien entre génotype et phénotype. Le génotype d’un or-
ganisme représente son patrimoine génétique déterminant l’ensemble de ses
caractéristiques. Le phénotype, quant à lui, correspond uniquement aux ca-
ractéristiques observables de cet organisme. L’intérêt de comprendre le lien
entre ces deux éléments réside dans le fait que même si le génotype participe en
grande partie au phénotype d’un organisme, l’environnement dans lequel celui-
ci se développe contribue également à modifier le phénotype. Ainsi, l’étude de
ces interactions permet de meilleures compréhensions et caractérisations de
la croissance des plantes afin de sélectionner des variétés plus robustes aux
différents stress en vue d’une agriculture compétitive et respectueuse de l’en-
vironnement.
C’est dans le but d’atteindre ces objectifs que le projet baptisé « PHE-
NOME » a vu le jour. Sa vocation est de fédérer l’ensemble des plateformes
de phénotypage à l’échelle nationale avec des collaborations au niveau eu-
ropéen. Parmi les différents types de plateforme du projet, on retrouve des
plateformes au champ équipées de capteurs et systèmes d’imagerie dédiés à
l’observation et la caractérisation des cultures. On retrouve également un vé-
hicule autonome doté de multiples capteurs baptisé « phénomobile » dont la
mission est l’analyse complète de microparcelles. Enfin, deux plateformes de
phénotypage à haut débit, dont l’objectif est l’analyse de plusieurs centaines
de plantes par jour, ont été créées. Au cœur de ces plateformes se trouve un
ensemble de systèmes d’acquisition allant du visible à l’infrarouge en passant
par l’imagerie de fluorescence.
Cependant, bien que des systèmes classiques d’acquisition en deux dimen-
sions permettent l’obtention de données précises et variées, les limites in-
hérentes à ce type de système sont perçues. Ces limites sont, entre autres, le
manque d’information de profondeur en tout point de la scène analysée. Cette
information est nécessaire dans plusieurs applications telles que l’estimation
de la croissance des plantes et l’étude de la disposition spatiale des éléments
4

Objectifs
composant ces plantes (feuilles, tige, fleurs, épis ...). Pour cela, l’utilisation de
systèmes capables d’évaluer cette profondeur est nécessaire.
Objectifs
Les objectifs de ces travaux de recherche sont donc le développement d’un
système d’acquisition et les traitements associés permettant l’évaluation de
la profondeur en tout point de la scène considérée. Si les systèmes d’acquisi-
tion 3D sont relativement ancrés actuellement dans d’autres domaines, leur
utilisation est récente en agriculture de précision. Les spécificités des scènes
agronomiques au sens large sont leur grande diversité et leur aspect complexe
du fait de leurs discontinuités de relief contrairement à un objet de surface
continue. De plus, le système d’acquisition n’étant pas destiné à une utilisa-
tion par des spécialistes du domaine de la vision artificielle, il doit faire l’objet
d’une utilisation intuitive et d’une automatisation maximum.
Contributions & structure de la thèse
Ce manuscrit est organisé de façon à refléter la démarche ayant permis
d’aboutir au système fonctionnel existant. Ainsi, le premier chapitre est consa-
cré à dresser l’état de l’art des techniques de reconstruction 3D. Un état de l’art
exhaustif de ces méthodes n’étant évidemment pas envisageable, ce chapitre
présente néanmoins un ensemble relativement large des techniques existantes
avec, lorsque cela est possible, un exemple de l’utilisation de la méthode à
une problématique agronomique. Les avantages et limitations de chacune des
méthodes présentées sont exposés en justifiant le choix de la méthode retenue.
Le second chapitre est dédié à la description des deux systèmes conçus dont
le rôle est l’acquisition de la séquence d’images particulière requise pour la mise
en œuvre de la méthode de reconstruction 3D développée. La méthode choisie
s’articulant autour d’une maîtrise parfaite de certains paramètres optiques,
une description de ces notions est réalisée. Les images acquises n’étant pas
originellement exemptes de défauts, un calibrage des systèmes d’acquisition
5

Introduction
et une correction des images sont nécessaires et détaillés ainsi que la procédure
d’acquisition à respecter.
Le troisième chapitre a pour rôle de présenter un aspect crucial de la mé-
thode d’estimation de la profondeur qui repose sur l’évaluation de la netteté
de chaque pixel. Un rapide état de l’art des outils permettant l’estimation
de la netteté est présenté ainsi que deux nouveaux opérateurs de mesure de
netteté développés et basés sur les descripteurs généralisés de Fourier. L’étude
du comportement de chaque opérateur de mesure de netteté présenté est réa-
lisée au travers d’une analyse adaptée à notre problématique faisant appel à
un plan d’expériences factoriel. Puisqu’un des objectifs est l’automatisation
de l’estimation de l’information de profondeur, deux approches d’évaluation
automatique de la netteté sont détaillées. De plus, cette analyse du compor-
tement des opérateurs et leur comparaison sont nécessaires afin de choisir
l’opérateur adéquat en fonction de la diversité des scènes étudiées et permet
de pallier au manque de vérité terrain de l’information de profondeur.
Le quatrième et dernier chapitre est, quant à lui, consacré à la présentation
de résultats de reconstruction 3D de scènes agronomiques. De plus, afin d’illus-
trer la portée des travaux réalisés au cours de ce doctorat, une application au
domaine de l’analyse de défaillance de circuits électroniques est présentée.
Enfin, une conclusion générale est exposée ainsi que les perspectives liées à
ces travaux de recherche.
6

Chapitre 1
État de l’art
1.1 Généralités
Depuis quelques années, le terme « 3D » est devenu quasi-omniprésent dans
un certain nombre de domaines. C’est le cas pour les téléviseurs, consoles
de jeux, imprimantes, cinéma, appareils photo ... etc. On remarque que, en
dehors des imprimantes 3D initialement utilisées pour du prototypage rapide
et de plus en plus accessibles au grand public, le terme « 3D » indique bien
souvent un mode de perception tridimensionnel du média considéré. La volonté
d’obtention de l’information tridimensionnelle à l’image de la vision humaine
n’est pas récente en vision par ordinateur. On peut citer les travaux de [Marr
et Poggio, 1977] sur la théorisation de la vision humaine et une implémentation
quatre ans plus tard par [Grimson, 1981].
Ainsi, depuis plus de trente ans, obtenir l’information tridimensionnelle est
un axe de recherche vaste qui est retrouvé au travers de différents termes
tels que acquisition 3D, reconstruction 3D ou encore numérisation 3D. Au-
jourd’hui, le besoin de recourir à ces méthodes est présent dans beaucoup
de domaines comme la robotique, le contrôle industriel, l’imagerie médicale,
la reconstruction environnementale ou encore, l’agronomie au travers notam-
ment de l’agriculture de précision. Bien souvent, ce besoin se manifeste pour
pallier au manque d’information induit par la 2D grâce à une interprétation
complète de la scène.
7

Chapitre 1 État de l’art
Le choix de la méthode de reconstruction 3D peut être imposé par le type de
représentation souhaité. On distingue deux grandes familles de représentation
3D : les représentations surfaciques et les représentations volumiques. Pour
les premières, on retrouve :
– les cartes de profondeurs : c’est une image en niveaux de gris ou en fausses
couleurs où la valeur de chaque pixel correspond à une distance entre le
point correspondant dans la scène et le système d’acquisition ;
– les surfels : abréviation de « surface element », ils sont composés d’attri-
buts décrivant un échantillon ponctuel de la surface comme ses coordon-
nées, sa texture, la normale ... etc ;
– le maillage : forme très répandue de représentation 3D, c’est un ensemble
de points définis par leurs coordonnées 3D reliés les uns aux autres par
des arêtes.
Les représentations volumiques regroupent :
– les voxels : pour « volumetric element », dénomination d’un pixel tri-
dimensionnel constitué d’une information colorimétrique associée à des
coordonnées spatiales ;
– les harmoniques sphériques : ceci permet une représentation fréquentielle
du modèle 3D en coordonnées sphériques.
Le choix de la méthode de reconstruction est aussi fonction de contraintes
liées à l’application comme :
– la profondeur mesurable, c’est-à-dire la distance minimum en Z (en consi-
dérant la scène comme un espace X, Y et Z) mesurable entre deux points :
ceci correspond à la précision du système de reconstruction ;
– la taille du système si des contraintes d’encombrement sont à prendre en
compte ;
– la vitesse d’acquisition si la scène est statique ou non ;
– le champ de vue possible du système d’acquisition qui correspond à la
dimension de la scène observable.
La figure 1.1.1 n’a pas l’ambition de proposer une liste exhaustive des diffé-
rentes techniques de reconstruction 3D mais fournit néanmoins une vue d’en-
semble des possibilités offertes. Le classement de ces techniques peut se faire
de plusieurs façons différentes. Dans le cadre de ce document, la classifica-
8

1.1 Généralités
Avec contact Sans contact
Non-Optique Optique
Active Passive
CMMs
Destructive Slicing
CT-Scan
RADAR
SONAR Temps de vol
Triangulation active
Shape from Shading
Shape from Motion
Shape from Focus
Shape from Silhouette
Triangulation passive
Shape from Texture
IRM
Shape from Defocus
Systèmes plénoptiques
Lumière structurée
Confocal stereo
Reconstruction 3D
Figure 1.1.1: Classification des méthodes de reconstruction 3D.
9

Chapitre 1 État de l’art
tion proposée est basée sur la méthode d’acquisition. Ainsi on distingue les
méthodes optiques des méthodes non optiques, avec ou sans contact, qui font
l’objet de deux sous-parties de ce chapitre.
Les techniques optiques sont elles-mêmes divisées en deux catégories ap-
pelées vision active et vision passive. La différence principale entre ces deux
catégories est l’adjonction ou non d’un illuminant particulier au capteur op-
tique. Le principe de fonctionnement de chaque méthode est présenté ainsi
que leurs avantages et inconvénients. Lorsqu’une utilisation pour une applica-
tion agronomique d’une méthode existe, cela est mentionné. Les justifications
concernant le choix de la méthode de reconstruction retenue sont présentées
en fin de chapitre.
1.2 Techniques non optiques
1.2.1 Avec contact
1.2.1.1 CMMs
Acronyme de « Coordinate Measuring Machines », autrement dit machine
de mesure de coordonnées [Seugling, 2000], une CMM est un appareil de me-
sure muni d’une sonde mobile de type palpeur (figure 1.2.1). La position de la
sonde est suivie par une série de codeurs sur chaque axe. La numérisation est
de type non destructive avec contact. Ces systèmes sont très précis (dixième
de µm) avec une bonne répétabilité mais très lents. Ils sont plutôt utilisés
dans le milieu industriel pour de la rétro-conception ou pour la vérification
dimensionnelle de pièces rigides. Le système palpeur peut également être cou-
plé avec des technologies de type scanner laser et intégré dans un système de
bras polyarticulé principalement utilisé pour la numérisation précise d’objets
immobiles.
10

1.2 Techniques non optiques
Figure 1.2.1: Machine de mesure de coordonnées [AER, 2013].
1.2.1.2 Découpe
Méthode d’acquisition 3D destructive, cette technique consiste à injecter
une résine dans l’objet à numériser puis à le découper en fines tranches. Ces
tranches seront supprimées après chaque acquisition de l’image correspon-
dante. La distance capteur/objet est contrôlée avec précision de telle sorte
que l’échelle de chaque image soit connue. Les différents plans de coupe sont
ensuite intégrés dans un logiciel de recomposition afin d’obtenir le modèle
3D complet de l’objet. L’intérêt de cette méthode est l’obtention d’un mo-
dèle volumique intégral de l’objet et pas seulement surfacique. On retrouve
l’utilisation de cette méthode dans le cadre de rétro-conception ou processus
de vérification de conformité par corrélation entre le modèle acquis et le mo-
dèle CAO de la pièce. Bien entendu, les méthodes avec contact ne sont pas
recommandées dans notre cas puisque nos scènes sont de type non rigide.
11

Chapitre 1 État de l’art
1.2.2 Sans contact
1.2.2.1 CT-Scan
Principalement utilisée dans le milieu médical, la tomodensitométrie [Doyon,
2000] (Computed Tomography), appelée couramment scanner, est de plus en
plus utilisée dans d’autres domaines. Cette technique permet une numérisa-
tion sans contact et non destructive de l’objet. Le principe de base consiste
à envoyer des rayons X à travers l’objet à scanner, puis à mesurer les rayons
X transmis afin de mettre en évidence les différentes zones d’absorptions des
rayons par l’objet. Une succession de coupes de l’objet est ainsi acquise per-
mettant une reconstruction volumique de celui-ci. On retrouve plusieurs appli-
cations de cette méthode en agronomie comme par exemple la reconstruction
3D de troncs d’arbres, utilisée afin de détecter les nœuds présents dans ceux-ci
[Krähenbühl et al., 2012].
1.2.2.2 IRM
L’Imagerie par Résonance Magnétique [Doyon, 2004] se base sur l’utilisa-
tion d’un champ magnétique (aimant) et des ondes radio. Contrairement au
CT-Scan, aucune radiation ionisante n’est émise. Son principe consiste à réali-
ser des images en coupe de l’objet étudié ; principalement du corps humain de
part sa composition importante en atomes d’hydrogène. Entourés d’un champ
magnétique, tous les atomes d’hydrogène s’orientent dans la même direction :
ils sont alors excités par des ondes radio durant une très courte période afin de
les mettre en résonance. A l’arrêt de cette stimulation, les atomes restituent
l’énergie accumulée en produisant un signal qui sera enregistré et traité par
les outils associés. Une succession de coupes est ainsi acquise qui, en les super-
posant et en les recalant, donne le modèle 3D volumique de l’objet étudié. On
trouve des utilisations agronomiques de cette méthode comme, par exemple,
dans le cadre d’étude de racines de plantes ou de cultures [Haber-Pohlmeier
et Pohlmeier, 2010].
Les deux méthodes présentées ici sont très utilisées pour l’étude de scènes
organiques mais ont pour principal inconvénient la nécessité d’une installation
12

1.3 Techniques optiques
encombrante. C’est donc le sujet de l’étude qui doit être placé au sein des
scanners, il est donc limité aux scènes pouvant être déplacées.
1.2.2.3 SONAR / RADAR
Acronyme de « SOund Navigation And Ranging » et « RAdio Detecting
And Ranging », ces deux techniques utilisent respectivement une onde sonore
et une onde radio comme moyen de déterminer l’information de profondeur.
Le principe consiste à émettre une onde sur l’objet à numériser et capter l’onde
réfléchie. La distance capteur/objet est déterminée par le temps (ttotal) que
met l’onde (de vitesse de propagation vonde) à faire l’aller/retour :
d =ttotal ×vonde
2. (1.2.1)
Plus de détails sur ces techniques peuvent être trouvés dans [Le Chevalier,
2002]. L’utilisation de technique RADAR est courante en télédétection, comme
par exemple l’étude de la composition des sols et son impact sur la croissance
des cultures de blé [Mattia et al., 2003].
1.3 Techniques optiques
1.3.1 Vision active
Le principe général des méthodes de reconstruction 3D utilisant la vision
active repose sur l’utilisation conjointe d’une caméra (ou capteur) et d’une
source d’énergie lumineuse. L’émission de lumière utilisée peut être de dif-
férents types tels que le laser ou la projection d’un motif particulier et va
dépendre de l’application visée. Cette catégorie de méthodes de reconstruc-
tion est composée de plusieurs principes de base différents qui sont présentés
dans les sous-sections suivantes.
13

Chapitre 1 État de l’art
1.3.1.1 Triangulation active
Cette catégorie de techniques regroupe tout un ensemble de méthodes ba-
sées sur l’utilisation d’une source d’émission et d’un capteur formant un tri-
angle avec l’objet à numériser. Plusieurs types de projection sont possibles
dont résultent des techniques de reconstruction différentes. On peut d’abord
citer les projections de lumière type laser.
Objet
Caméra
Figure 1.3.1: Triangulation active par projection de point laser.
Un point laser est projeté sur l’objet à numériser et acquis par la caméra
(Figure 1.3.1). Le système étant préalablement calibré, l’orientation et l’in-
clinaison spatiale de la caméra et du laser sont connues. Ceci permet, par
triangulation, de déterminer la distance entre la caméra et l’objet au niveau
du point projeté. Le principal inconvénient de cette méthode est le nombre
très élevé de points à acquérir pour obtenir une reconstruction acceptable
de l’objet. Cette méthode est principalement utilisée en remplacement des
techniques CMMs.
Afin d’accélérer la procédure d’acquisition, le point laser peut être orienté
vers un système de lentilles divergentes (cylindriques) afin de transformer ce
point en une ligne laser (Figure 1.3.2).
Contrairement au système point laser, les relations de triangulation ne sont
plus utilisées pour déterminer la profondeur mais une étude de la déformation
14

1.3 Techniques optiques
Caméra
Objet
Figure 1.3.2: Triangulation active par projection de ligne laser.
de la ligne par l’objet permet de remonter à cette information. Un balayage
de l’objet est nécessaire pour la numérisation complète, d’où le nom « scanner
3D » couramment utilisé pour dénommer cette méthode. On retrouve ce type
de système sur des bras polyarticulés ou des appareils de scanning utilisant
des miroirs rotatifs pour balayer la scène. L’utilisation principale concerne
le domaine industriel pour de la rétro-conception ou du contrôle qualité et,
de plus en plus, le domaine du patrimoine pour de la numérisation d’œuvres
d’art [Chane et al., 2012]. L’inconvénient de l’utilisation de pointeurs laser est
la nécessité du déplacement ainsi que le nombre d’acquisitions importantes à
effectuer. Un autre problème survient lorsque la ligne n’est pas entièrement vi-
sible par la caméra (phénomène appelé occlusion), ce qui entraine un problème
de mise en correspondance.
Une autre solution, dénommée lumière structurée, est la projection d’un
motif particulier 2D sur la scène considérée en lieu et place du laser. Ces
méthodes correspondent au deuxième type de projection couramment utilisé
en vision active. Un projecteur classique est utilisé pour projeter un motif 2D
sur la scène complète. Il existe beaucoup de motifs différents utilisables mais
15

Chapitre 1 État de l’art
ceux-ci peuvent être regroupés en trois catégories : le multiplexage temporel,
le codage spatial et le codage direct. Plusieurs travaux de recherche sur le
regroupement et la comparaison des différents types de motifs ont été publiés
depuis plus de dix ans. Parmi les plus populaires, on peut citer [Batlle et al.,
1998] et [Salvi et al., 2004] dont une mise à jour récente a été réalisée dans
[Salvi et al., 2010]. Une présentation succincte des différentes catégories est
faite ici.
Multiplexage temporel
Le principe de cette catégorie repose sur une projection successive de plu-
sieurs motifs sur la scène considérée et l’acquisition de la scène après chaque
projection. Un exemple classique de motifs utilisés durant la phase d’acquisi-
tion est illustré figure 1.3.3 et a été présenté la première fois par [Posdamer
et Altschuler, 1982].
Figure 1.3.3: Motifs de projection basés sur le code binaire [Posdamer et Alt-schuler, 1982].
Chaque pixel de la scène acquise va donc prendre une valeur dépendante du
motif projeté au cours du temps qui constituera un mot binaire. La mise en
correspondance sera ensuite effectuée en comparant le code binaire des pixels
des images acquises aux codes binaires des images projetées.
Plusieurs améliorations de la projection de code binaire ont été proposées,
notamment l’utilisation d’un codage de Gray par [Inokuchi et al., 1984] qui
permet une meilleure robustesse au bruit. [Rocchini et al., 2001] proposent
quant à eux d’utiliser non pas une mire noire et blanche mais rouge et bleue
ainsi qu’un léger espace de couleur verte d’un pixel entre les bandes proje-
tées. Ceci permet de faciliter la localisation de la transition des bandes. Le
principal inconvénient induit par l’utilisation de ce type de motif est le grand
16

1.3 Techniques optiques
nombre d’acquisitions nécessaires à la reconstruction et, par conséquent, seules
des scènes statiques sont reconstruites. Pour diminuer ce nombre d’images à
projeter, [Caspi et al., 1998] utilisent des motifs couleurs basés sur les codes
n-aires pour lesquels les franges sont codées dans l’espace RGB. Ceci permet
également un meilleur fonctionnement avec des scènes non neutres colorimé-
triquement parlant car le code couleur peut être adapté à l’environnement.
On peut également citer des méthodes hybrides projetant conjointement un
codage temporel et spatial et permettant une acquisition rapide [Ishii et al.,
2007].
Codage spatial
Contrairement au multiplexage temporel où les mots de code sont obtenus
suite à une projection d’images successives, la projection de motifs codés spa-
tialement permet une obtention des mots à partir de l’information des pixels
voisins. Ceci a pour effet premier de permettre la reconstruction 3D de scènes
en mouvement du fait de l’acquisition unique du motif nécessaire. Les infor-
mations des pixels voisins utilisées peuvent être les variations d’intensité et
de couleur pour former le mot codé de chaque pixel. On retrouve pour ces co-
dages plusieurs types de motifs projetés tels que ceux basés sur une séquence
de Bruijn [Pajes et Forest, 2004, Salvi et al., 2004], des codes couleurs [Priba-
nić et al., 2009], des codages non formels [Maruyama et Abe, 1993] ou encore
le codage M-arrays [Vuylsteke et Oosterlinck, 1990].
Des exemples de motifs sont illustrés figure 1.3.4. Les principales limitations
de ces motifs sont la sensibilité aux occlusions et, pour les motifs couleurs, la
difficulté de mise en correspondance sur une scène colorée.
Un exemple d’utilisation de ce type de motif en agronomie est présenté par
[Chéné et al., 2012]. L’appareil Kinect (Microsoft, Redmond, Washington),
développé par la société Primasense, est utilisé et permet une reconstruction
3D de la scène. Le capteur comprend un système de projection de lumière
structurée infrarouge constituée de points répartis semi-aléatoirement en neuf
blocs ainsi qu’un capteur infrarouge. La reconstruction 3D des plantes consi-
dérées permet une segmentation simple des feuilles en vue de l’identification
de pathogènes.
17

Chapitre 1 État de l’art
a b
c d
Figure 1.3.4: Motifs codés spatialement. a. De Bruijn [Pajes et Forest, 2004].b. Codage M-arrays [Vuylsteke et Oosterlinck, 1990]. c. Codagecouleur [Pribanić et al., 2009]. d. Codage non formel [Maruyamaet Abe, 1993].
Codage direct
Pour ce type de codage, une seule mire est utilisée comme pour un codage
spatial mais le codage est réalisé directement au niveau du pixel projeté. Deux
types de codage direct sont à différencier : ceux en niveaux de gris et ceux en
couleur. [Carrihill et Hummel, 1985] proposent l’utilisation d’une mire repré-
sentant un dégradé de niveaux de gris horizontal (figure 1.3.5a). La méthode
est améliorée par [Miyasaka et al., 2000] qui obtiennent une reconstruction
plus précise en utilisant une caméra tri-CCD en lieu et place d’une caméra
couleur. Une mire couleur, semblable à un arc en ciel (figure 1.3.5b) projetée
sur la scène, est proposée par [Tajima et Iwakawa, 1990]. Ce type de mire
permet un codage d’une plus grande dynamique que celles en niveaux de gris
mais est, de fait, plus sensible aux propriétés colorimétriques de la scène consi-
dérée. Un inconvénient majeur de ce type de codage est aussi lié à la haute
sensibilité au bruit additif due aux différences très faibles entre deux niveaux
successifs. Ainsi, un niveau de bruit modifiant la valeur d’un pixel entraine
une estimation erronée de sa profondeur.
18

1.3 Techniques optiques
Red
a b
Figure 1.3.5: Motifs codage direct. a. Codage direct niveau de gris [Carrihillet Hummel, 1985]. b. Codage direct couleur [Tajima et Iwakawa,1990].
Pour conclure, ces techniques, basées sur la projection de lumière structurée,
sont considérées comme très efficaces pour une reconstruction 3D de la scène
tant que cette dernière est constituée de couleurs plutôt neutres avec un relief
peu accentué.
1.3.1.2 Télémétrie
La télémétrie consiste à mesurer la distance séparant un objet et un émet-
teur/récepteur d’après l’étude de l’onde émise par ce dernier. L’onde peut être
non optique, telle que RADAR ou SONAR présentées précédemment, mais
également optique, comme c’est le cas dans les systèmes LIDAR (LIgh De-
tection And Ranging) aussi appelés télémètre laser. La mesure de la distance
peut être effectuée de plusieurs façons.
La première, à l’aide d’une caméra dite « temps de vol », consiste à émettre
une impulsion de lumière laser qui est réfléchie par l’objet à scanner. Le ré-
sultat de cette réflexion est détecté par un capteur et le temps écoulé entre
l’émission et la détection donne la distance objet/capteur (eq. 2.2.1 page 13).
La deuxième technique consiste à moduler en amplitude l’onde laser puis à
mesurer le déphasage entre l’onde émise et l’onde reçue. La mesure de distance
est déduite de cette différence de phase.
La télémétrie est particulièrement bien adaptée aux reconstructions de
grandes structures comme des bâtiments du fait de leur portée élevée (>
300m) et de leur précision de l’ordre du millimètre. Plus de détails sur ces
19

Chapitre 1 État de l’art
différentes méthodes peuvent être trouvés dans [Adams, 2002].
Dans le domaine agronomique, on retrouve une utilisation du LIDAR de
plus en plus importante, principalement en télédétection et à des fins de ca-
ractérisation de la structure de la végétation [Omasa et al., 2007].
1.3.2 Vision passive
Contrairement à la vision active, les méthodes dites « passives » ne né-
cessitent pas d’illuminant additionnel pour fonctionner. Dans cette catégorie
de méthodes de reconstruction 3D, on retrouve également des méthodes par
triangulation mais utilisant plusieurs caméras, des méthodes se basant sur
l’analyse des images acquises et des méthodes nécessitant une optique parti-
culière.
1.3.2.1 Triangulation passive
Cette catégorie de méthodes de reconstruction 3D comprend une des tech-
niques les plus répandues : la stéréovision aussi appelée « Shape from Stereo ».
Son origine est probablement la plus ancienne puisque se basant sur le pro-
cédé de perception humaine : l’obtention du relief à partir de deux points de
vue légèrement différents. Un des premiers dispositifs d’affichage d’images 3D
appelé stéréoscope est d’ailleurs basé sur la stéréovision et a été inventé par
le physicien anglais Charles Wheatstone en 1838.
La mesure de la distance entre les caméras et les points de la scène revient
à une simple triangulation entre ces trois éléments. Cependant, cette triangu-
lation ne devient possible que lorsque chaque point de la scène est projeté sur
chaque image avec une position connue. Les deux images (ou plus) de la scène
sont acquises avec des points de vue différents, ce qui a pour effet de créer une
disparité géométrique entre elles. La mesure de cette disparité est réalisée en
déterminant les correspondances entre chaque image qui représentent la visi-
bilité d’un même point de la scène dans les images acquises. Les différentes
étapes composant cette méthode, introduites par [Barnard et Fischler, 1982]
et généralisées dans le cadre de la géométrie multivues par [Hartley, 2008],
20

1.3 Techniques optiques
sont :
1. Calibrage des caméras permettant l’obtention des paramètres intrin-
sèques et extrinsèques du système multi-caméras.
2. Rectification des images acquises suite au calibrage. Ceci permet de
réduire la complexité d’appariement puisque un point dans une image
ne pourra se trouver que sur une ligne dans la deuxième image (droite
épipolaire).
3. Mise en correspondance des points par une méthode d’appariement.
4. Calcul de la carte de disparité permettant la reconstruction 3D de la
scène.
L’étape d’appariement représente la principale difficulté pour le bon fonction-
nement de cette technique et dépend du choix de la base entre les caméras
ainsi que l’angle d’inclinaison de celles-ci. En effet, plus la base est grande et
plus la mesure de distance est précise, plus on est exposé au phénomène d’oc-
clusion (un point de la scène vu par une caméra ne l’est pas nécessairement
par l’autre). Des informations détaillées sur le concept de stéréovision peuvent
être trouvées dans [Faugeras, 1993].
On trouvera dans [Rovira-Más et al., 2008] un exemple d’utilisation d’une
caméra stéréoscopique afin d’obtenir une cartographie de terrain 3D utile en
agriculture de précision.
1.3.2.2 Shape from Texture
De la même façon que le fait la vision humaine, cette technique permet
de reconstruire une forme à partir de sa surface en utilisant les informations
contenues dans sa texture [Kanatani et Chou, 1989]. Les variations de cette
texture sur l’image permettent d’estimer la forme de la surface observée à par-
tir d’une seule image. Le champ de normales à la surface de l’objet est retrouvé
à l’aide d’algorithmes complexes valables en théorie mais peu utilisés en pra-
tique [Forsyth, 2002]. En effet, la reconstruction tridimensionnelle de la forme
n’est possible que si les normales sont assez denses et la surface assez lisse avec
une texture régulière (figure 1.3.6). Une texture régulière étant caractérisée
21

Chapitre 1 État de l’art
���
−8 −6 −4 −2 0 2 4 6 8
x 10−3
−8
−6
−4
−2
0
2
4
6
8
x 10−3
x
y���
−
� � ���
.����� B8 /�0 6������� ����� ���� ������� �������� /�0 J����� �� ��� �������� / 0 ����� � �� ������ ��� ���� ��� ������ �� ���� /�0 E�����+�#����� �� / 0 �� ���� ������� I� ���� /�0 ���� ��� ������ ������ �� ���������� ����� ��� ������ �� ��� ������ �� ��� �� ������ ��� ����� � / 0�
�������������/�� �0��������
A�������/�� �0 � � /�0
�������
� �� �
�-������ /%H0 �������� ���������� ��� ����������� �������� �� ��������� ���
&
a b
���
− − − −−
−
−
−
−
−
���
0
10
20
30
40
0
10
20
30
40−5
0
5
10
xy
z
� � ���
.����� B8 /�0 6������� ����� ���� ������� �������� /�0 J����� �� ��� �������� / 0 ����� � �� ������ ��� ���� ��� ������ �� ���� /�0 E�����+�#����� �� / 0 �� ���� ������� I� ���� /�0 ���� ��� ������ ������ �� ���������� ����� ��� ������ �� ��� ������ �� ��� �� ������ ��� ����� � / 0�
�������������/�� �0��������
A�������/�� �0 � � /�0
�������
� �� �
�-������ /%H0 �������� ���������� ��� ����������� �������� �� ��������� ���
&
c d
Figure 1.3.6: Shape from Texture. a. Image originale. b. Champ de normales.c. Surface reconstruite à partir du champ de normales. d. Cartede profondeur. [Clerc et Mallat, 2002].
par un motif de base se répétant périodiquement. Cette technique est donc
valable seulement si la surface de l’objet ne présente pas de discontinuités.
1.3.2.3 Shape from Shading
Cette technique de reconstruction 3D monoculaire est basée sur l’analyse de
la distribution d’intensité lumineuse réfléchie par l’objet ainsi que les ombres
propres à la surface de l’objet. Elle fait l’objet de recherches depuis le début
des années 70 [Horn, 1970] et un état de l’art des différentes approches de cette
méthode peut être trouvé dans [Zhang et al., 1999]. L’analyse des niveaux de
22

1.3 Techniques optiques
gris de l’image permettant la reconstruction 3D dépend donc de plusieurs pa-
ramètres tels que les propriétés de réflectance de la surface, sa forme et les
conditions d’illumination. Un certain nombre d’hypothèses doivent donc être
formulées afin de pouvoir décrire la forme de l’objet. Cette technique implique
beaucoup de contraintes et ne fonctionne que sous certaines conditions parti-
culières comme, par exemple, la numérisation et la mise à plat de documents
scannés [Courteille, 2006].
1.3.2.4 Shape from Motion
Autrement appelée « Structure From Motion », cette méthode permet de
retrouver l’information de surface à partir du mouvement relatif estimé entre
l’objet et la caméra. L’acquisition est réalisée soit par une caméra en mou-
vement réalisant une prise d’images successives ou une vidéo (figure 1.3.7),
soit par un objet en mouvement par rapport au système d’acquisition. Glo-
balement, la reconstruction est réalisée en calculant le déplacement entre les
caméras par la recherche de points caractéristiques [Pollefeys et al., 2004].
Déplacement de la caméra
…
Objet
Image1
Image 2
Image 3
Image m
Figure 1.3.7: Principe d’acquisition « Shape from Motion ».
23

Chapitre 1 État de l’art
L’information de profondeur est retrouvée en analysant le mouvement ap-
parent des points caractéristiques en fonction du mouvement de la caméra
entre deux acquisitions (plus un point est éloigné de la caméra, plus celui-ci
paraitra avoir un faible déplacement entre deux acquisitions). Une application
couramment utilisée est le SLAM (Simultaneous Localisation And Mapping)
permettant de reconstruire un environnement en temps réel en fonction du
déplacement d’une caméra présente sur un robot [Bailey, 2002]. Un exemple
grand public est Google Street View qui propose une visualisation 3D des villes
réalisée par « Structure from Motion » à l’aide d’un ensemble de caméras mon-
tées sur un véhicule.
1.3.2.5 Shape from Silhouette
Également connue sous le nom de « Visual Hull » [Laurentini, 1994], cette
technique s’appuie sur l’acquisition de plusieurs images de l’objet à recons-
truire depuis différents points de vue. Une fois la segmentation permettant
de séparer l’objet de l’arrière plan effectuée, on obtient la silhouette de l’ob-
jet pour chaque point de vue. Afin d’obtenir les images, on peut soit utiliser
plusieurs caméras (figure 1.3.8), soit positionner l’objet sur un plateau rotatif
et réaliser les acquisitions avec une seule caméra. La reconstruction 3D est
ensuite obtenue par assemblage des différentes silhouettes. Une application de
cette méthode conjointement à la stéréovision peut être trouvée dans [Cheung
et al., 2003]. Une limite importante de ce procédé est son non-fonctionnement
dans le cas d’objets présentant des zones concaves. Contrairement aux mé-
thodes précédemment présentées, les suivantes reposent sur la connaissance
et la maitrise des propriétés optiques du système utilisé.
1.3.2.6 Shape from Defocus
Dans le cas du « Shape from Defocus », on utilise une série limitée d’images
(au minimum deux) acquises avec des paramètres optiques différents afin de
ne pas avoir un flou optique identique dans les images. Pour obtenir l’infor-
mation de profondeur, cette technique exploite le flou optique perceptible sur
les images. Ce flou correspond à un étalement de l’intensité lumineuse cor-
24

1.3 Techniques optiques
Figure 1.3.8: Schéma représentatif du « Visual Hull ».
respondant à un point de la scène sur le capteur. Cet étalement est lié à une
mauvaise focalisation de l’image sur le plan capteur (cf chapitre 3 Générali-
tés optiques). C’est l’estimation de cette fonction d’étalement du point (ou
PSF : Point Spread Function) qui va permettre de remonter à l’information de
profondeur car plus l’étalement est important, plus la distance objet/capteur
l’est également. Plusieurs modélisations de cette fonction de flou sont propo-
sées dans la littérature. On peut citer [Pentland, 1987] qui considère la fonction
de flou comme une fonction Gaussienne et [Subbarao, 1988] qui propose de
calculer la fonction de transfert optique (OTF) correspondant à la transfor-
mée de Fourier de la PSF. Quelle que soit la modélisation de la PSF choisie,
la fonction de flou se comporte comme un filtre passe-bas dont la fréquence
de coupure dépend de la défocalisation.
On notera que cette méthode est aussi quelquefois utilisée conjointement à
un système de projection, faisant d’elle une technique active [Pentland et al.,
1994]. Le principe est de projeter un motif sur la scène et de comparer ensuite
l’image du motif projeté sur la scène à l’image du modèle projeté connue
pour déterminer la profondeur de la scène. [Favaro et al., 2003] mettent en
évidence le fait que cette méthode permet de reconstruire efficacement des
surfaces lisses notamment lorsque la radiance de la scène est contrôlée (figure
1.3.9). Cette méthode est difficilement applicable à des scènes complexes.
25

Chapitre 1 État de l’art
Figure 1.3.9: Exemple de reconstruction 3D par « Shape from Defocus ». [Fa-varo et Soatto, 2002]
1.3.2.7 Shape from Focus
Alors que la technique « Shape from Defocus » utilise l’information de flou
pour déterminer la profondeur, la méthode « Shape from Focus » se base
sur l’information de netteté. Également appelée « Depth from Focus », cette
technique de reconstruction 3D a été introduite par [Nayar, 1989]. Elle se
décompose en plusieurs étapes représentées sur la figure 1.3.10.
La première étape est l’acquisition de la séquence d’images de la scène dont
on souhaite effectuer la reconstruction 3D. La procédure détaillée d’acquisi-
tion est expliquée au prochain chapitre mais il est bon de noter qu’à chaque
pixel correspond une image dans laquelle celui-ci est net. L’idée générale d’ac-
quisition étant un balayage complet de la scène par le plan focal.
Une fois la séquence d’images obtenue, une évaluation de la netteté de
chaque pixel de la séquence est faite. Le même pixel de chaque image de la
séquence doit représenter le même point spatial dans la scène. Une mesure
de netteté locale est appliquée à chaque pixel et son voisinage permettant de
26

1.3 Techniques optiques
Acquisition
séquence
d’images
Mesure
netteté
Interpolation
Carte de
profondeur
Figure 1.3.10: Principe du « Shape from Focus ».
déterminer l’image dans laquelle chaque point de la scène est le plus net. On
retrouve ici le principe de base de l’autofocus en photographie numérique qui
consiste à maximiser une mesure de netteté afin de focaliser correctement sur
l’objet visé.
Une valeur de netteté étant déterminée pour chaque pixel de chaque image,
il peut être intéressant d’interpoler la courbe de netteté obtenue pour chaque
point de la scène. En effet, en fonction de la précision du système d’acquisition
utilisé, la position de la valeur maximum de netteté n’est pas nécessairement la
position réelle du point de la scène. Comme le but est d’obtenir une estimation
de la profondeur en tout point de la scène la plus précise possible, il est bon
d’approximer la position du point maximum de la courbe de netteté. Quelques
méthodes d’interpolation utilisées en « Shape from Focus » sont présentées
chapitre 3 section 3.3.
Finalement, la reconstruction 3D de la scène se déroule en plusieurs étapes
en fonction des situations. L’étape commune à toutes les situations est la
27

Chapitre 1 État de l’art
création de la carte de profondeur. Cette dernière est constituée des diffé-
rentes positions spatiales des points de la scène correspondant aux positions
approximées lors de l’étape précédente. Ces positions spatiales peuvent être
représentées par des niveaux de gris pour une meilleure clarté. Par exemple,
plus un pixel est blanc et plus le point correspondant est éloigné du système
d’acquisition. Inversement, plus il est sombre et plus il est proche du système.
Avec un calibrage du système, ces niveaux de gris renvoient directement à une
position métrique de chaque point. Une représentation en fausses couleurs est
également possible pour permettre une meilleure visualisation.
Si la situation n’exige que l’obtention de l’information de profondeur en tout
point de la scène considérée, alors seule la carte de profondeur est nécessaire.
Si une représentation 3D de la scène est souhaitée, la carte de profondeur
est projetée sur trois axes et la texture de la scène est plaquée sur la surface
projetée. Connaissant les images où les pixels sont nets, une image de la scène
entièrement nette peut être construite et utilisée pour le plaquage de texture.
Cette technique de reconstruction 3D est habituellement utilisée dans le
domaine de l’infiniment petit, comme la microscopie confocale qui peut être
assimilée au « Shape from Focus ». La différence est l’utilisation d’une source
lumineuse collimatée ne permettant pas de rayons divergeants, et donc seules
les zones nettes sont conservées. L’avantage principal de cette méthode est
son fonctionnement sur des scènes où le phénomène d’occlusion est très pré-
sent. De plus, en fonction des propriétés optiques du système, elle permet une
reconstruction très précise et dense de la scène considérée.
1.3.2.8 Confocal stereo
Méthode pouvant être considérée comme une technique dérivée du « Shape
from Focus » et « Defocus », celle-ci a été récemment proposée par [Hasinoff
et Kutulakos, 2009]. L’idée est de ne pas évaluer la netteté directement sur les
images acquises localement mais sur une image particulière nommée « AFI »
pour « Aperture-Focus Image ». Cette image est le résultat de la mosaïque
construite par un même point de la scène projeté sur le capteur au travers
de différents paramètres optiques. La séquence d’images nécessaire est acquise
28

1.3 Techniques optiques
par un balayage de la scène correspondant à une variation de la focalisation (si-
milaire au « Shape from Focus ») mais pour chaque focalisation, une variation
de l’ouverture est également effectuée. Une image différente est donc acquise
pour chaque couple focalisation/ouverture. L’analyse de chaque image AFI,
correspondant à chaque point de la scène, permet de déterminer quel doublet
focalisation/ouverture renvoie au point le plus net. Ceci permet l’obtention
de l’information de profondeur et la reconstruction 3D de la scène. L’incon-
vénient majeur de cette méthode est le nombre bien plus important d’images
nécessaires pour une bonne reconstruction en comparaison du « Shape from
Focus ».
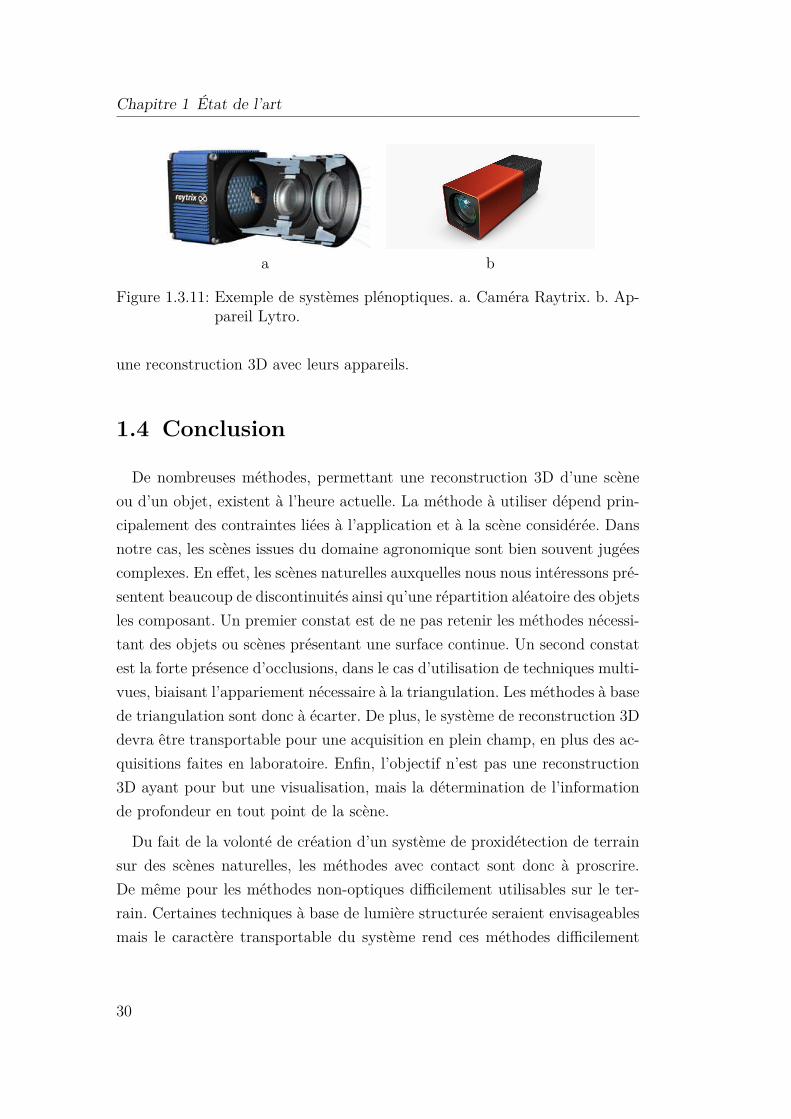
1.3.2.9 Systèmes plénoptiques
Les prémices de ce procédé ont été décrites par le prix Nobel de Physique
Gabriel Lippmann dans [Lippmann, 1908] sous le terme de « Photographie in-
tégrale ». Pourtant, c’est plus récemment que le procédé a vraiment vu le jour
sous une forme opérationnelle. Le principe repose sur la superposition d’un
réseau de micro-lentilles sur le capteur image. La maîtrise de ce réseau de
lentilles permet de capturer plusieurs images de la même scène issues de plu-
sieurs distances de focalisation différentes. Toutes ces images sont imbriquées
sur le capteur en fonction du réseau de lentilles. La profondeur est calculée
en étudiant la netteté des micro-images associées aux micro-lentilles puisque
la distance entre un point de la scène et ces dernières est connue. Deux en-
treprises commercialisent actuellement ce type de système : Raytrix pour des
caméras industrielles et Lytro pour des appareils plutôt grands publics (figure
1.3.11).
L’entreprise Lytro est le fruit des recherches réalisées sur les systèmes plé-
noptiques par [Ng, 2006]. Le grand intérêt de ce type d’appareil en photo-
graphie est la possibilité de faire la mise au point a posteriori de la prise
d’image. La limitation principale de ces systèmes est induite par son mode de
fonctionnement : un seul capteur pour plusieurs distances de focalisation. Cela
entraine une réduction de la surface utile du capteur et donc une définition
moindre des images. A l’heure actuelle, seules les caméras Raytrix proposent
29
Chapitre 1 État de l’art
a b
Figure 1.3.11: Exemple de systèmes plénoptiques. a. Caméra Raytrix. b. Ap-pareil Lytro.
une reconstruction 3D avec leurs appareils.
1.4 Conclusion
De nombreuses méthodes, permettant une reconstruction 3D d’une scène
ou d’un objet, existent à l’heure actuelle. La méthode à utiliser dépend prin-
cipalement des contraintes liées à l’application et à la scène considérée. Dans
notre cas, les scènes issues du domaine agronomique sont bien souvent jugées
complexes. En effet, les scènes naturelles auxquelles nous nous intéressons pré-
sentent beaucoup de discontinuités ainsi qu’une répartition aléatoire des objets
les composant. Un premier constat est de ne pas retenir les méthodes nécessi-
tant des objets ou scènes présentant une surface continue. Un second constat
est la forte présence d’occlusions, dans le cas d’utilisation de techniques multi-
vues, biaisant l’appariement nécessaire à la triangulation. Les méthodes à base
de triangulation sont donc à écarter. De plus, le système de reconstruction 3D
devra être transportable pour une acquisition en plein champ, en plus des ac-
quisitions faites en laboratoire. Enfin, l’objectif n’est pas une reconstruction
3D ayant pour but une visualisation, mais la détermination de l’information
de profondeur en tout point de la scène.
Du fait de la volonté de création d’un système de proxidétection de terrain
sur des scènes naturelles, les méthodes avec contact sont donc à proscrire.
De même pour les méthodes non-optiques difficilement utilisables sur le ter-
rain. Certaines techniques à base de lumière structurée seraient envisageables
mais le caractère transportable du système rend ces méthodes difficilement
30

1.4 Conclusion
adaptables.
En résumé et, par rapport à nos contraintes, les méthodes potentiellement
utilisables sont les suivantes :
– Systèmes plénoptiques ;
– Confocal stereo ;
– Shape from Focus.
Parmi les systèmes plénoptiques actuellement disponibles sur le marché,
les caméras Raytrix sont des outils intéressants. En effet, une précision en
profondeur de l’ordre de 2 mm est obtenue pour un champ de vue de 210 mm
par 140 mm, le tout en une seule acquisition. Cependant, de tels systèmes
d’acquisitions sont des outils très onéreux (de 25 k€ à 45 k€ en fonction de la
caméra, de l’objectif et du logiciel associé choisi).
Dans le cas de la récente technique baptisée « Confocal stereo », l’utilisation
d’appareil photographique numérique professionnel permettant un contrôle
automatique des différents paramètres optiques et des prises de vues est né-
cessaire. Plus abordable que des appareils plénoptiques, cette technique né-
cessite cependant un nombre important d’images de la scène pour une bonne
reconstruction.
Enfin, la méthode « Shape from Focus » permet l’utilisation de caméras
et objectifs standards. Le nombre d’images nécessaire à cette méthode de re-
construction 3D est bien moins élevé que pour la méthode « Confocal stereo ».
Nous avons donc choisi de nous orienter sur ce type de méthode qui semble être
un compromis entre coût raisonnable du système global et précision. De plus,
cette méthode étant habituellement utilisée dans le domaine microscopique,
il est intéressant de tester sa faisabilité pour des utilisations macroscopiques.
31


Chapitre 2
Systèmes d’acquisition
L’objectif de ce chapitre est de détailler les travaux de réflexion menant à la
conception du système de proxidétection. Ce dernier permet l’acquisition de la
séquence d’images alimentant la méthode de reconstruction 3D « Shape from
Focus ». Cette méthode repose principalement sur la maitrise des propriétés
optiques du système. Une première sous-section est consacrée aux rappels
des principes optiques liés à ces travaux ainsi que des détails des paramètres
optiques dont nous avons le contrôle. Un premier système expérimental, ayant
pour but la validation de la faisabilité de la méthode de reconstruction 3D
retenue, est décrit par la suite. Enfin, la description du système final, son
calibrage et la procédure d’acquisition associée sont présentés.
2.1 Généralités optiques
Cette section présente les notions de base permettant de mieux comprendre
les phénomènes intervenant lors du processus de formation des images. La
présentation de ce dernier est l’occasion de définir la notion de profondeur de
champ, directement liée à la précision de la reconstruction 3D. Cette profon-
deur de champ est en lien avec plusieurs paramètres optiques détaillés dans
une deuxième sous-section.
33

Chapitre 2 Systèmes d’acquisition
2.1.1 Formation géométrique des images
La façon la plus simple d’expliquer le processus de formation d’une image
passe par la présentation de l’appareil sténopé. L’appellation anglophone de
cet appareil est « pinhole camera » et permet aisément d’imager le processus
de formation d’une image. En effet, cet appareil est une boite hermétique
à la lumière dans laquelle est percé un trou dont le diamètre est supposé
nul. Ainsi, tous les rayons lumineux passant par le trou projettent la scène
observée renversée sur le fond de la boite (figure 2.1.1). En réalité, le diamètre
du trou ne pouvant être nul, il revient à un compromis entre une petite taille
engendrant trop peu de lumière et un diamètre trop grand rendant l’image
projetée floue.
Figure 2.1.1: Schéma d’un appareil sténopé.
Le remplacement de ce trou par une lentille permet de laisser passer plus de
lumière tout en obtenant des images nettes. Cependant, l’utilisation de len-
tilles ajoute une complexité au processus de formation des images. En effet, les
rayons lumineux provenant de la scène et passant par une lentille subissent un
changement de milieu puisqu’ils traversent l’air puis un matériau spécifique.
Le comportement des rayons lumineux lors de ce changement de milieu suit la
loi de Snell-Descartes qui, d’après le schéma figure 2.1.2, conduit à l’équation :
n1sin(θ1) = n2sin(θ2). (2.1.1)
34

2.1 Généralités optiques
Normale à la surface
Rayon incident Rayon réfléchi
Rayon réfracté
Milieu d’indice n1
Milieu d’indice n2
θ1
θ2
θ1
Figure 2.1.2: Loi de Snell-Descartes.
A cette loi est associé un des principes de base en optique qui est que la
lumière, constituée de rayons lumineux parallèles, se propage en ligne droite
dans un milieu transparent, homogène et isotrope. Ainsi, chaque rayon inci-
dent est réfléchi et réfracté lors du passage par le point d’incidence. Ce point
d’incidence correspond au changement de milieu entre l’air et le matériau
constituant la lentille. L’angle d’incidence θ1 du rayon incident conduit, en
fonction de l’indice du milieu n2 lié au matériau de la lentille, à un angle de
réfraction θ2. L’angle du rayon réfléchi par la surface de la lentille est quant
à lui d’un angle identique à l’angle d’incidence.
La constitution des lentilles permet donc une focalisation des rayons lu-
mineux sur le capteur. Par définition, une lentille est un milieu transparent,
homogène et isotrope et est constituée de deux dioptres. Un dioptre est la
surface séparant deux milieux d’indices différents. On distingue les lentilles
convergentes permettant le stigmatisme, c’est-à-dire une focalisation de tous
les rayons issus d’un même point de la scène, des lentilles divergentes entrai-
nant un angle θ2 > θ1.
On retrouve deux modèles de lentille : la lentille mince et la lentille épaisse.
35

Chapitre 2 Systèmes d’acquisition
Le second modèle est utilisé pour les calculs optiques nécessaires à la concep-
tion des objectifs puisqu’étant au plus proche de la réalité. Cependant, afin de
simplifier les calculs dans les cas autres que la conception optique, l’épaisseur
des lentilles est considérée comme négligeable et donc le modèle de lentille
mince est utilisé (figure 2.1.3).
A
u v
f
Ib(x,y) Is(x,y)
δ
Plan
objet Plan
capteur
Plan
image
P
Q
Lentille
r
O F’ F
Figure 2.1.3: Schéma de formation d’une image par une lentille mince conver-gente.
36

2.1 Généralités optiques
Où f= OF = OF ′ est la focale de la lentille ;
u la distance entre un point P d’un objet et le centre optique
de la lentille O ;
v la distance entre le centre optique O et le point de
focalisation Q correspondant au point P sur le plan image ;
δ est la distance entre le plan image et le plan capteur ;
O est le centre optique de la lentille ;
F est le foyer objet ;
F ′ est le foyer image ;
P est un point de la scène ;
Q est le point projeté de P par la lentille ;
A est l’ouverture relative du diaphragme ;
r est le rayon d’étalement de l’énergie d’un point défocalisé.
Les propriétés spécifiques à une lentille mince sont :
– tout rayon passant par le centre optique de la lentille O n’est pas dévié ;
– tout rayon arrivant parallèlement à l’axe optique est dévié puis suit une
droite passant par un foyer image F ′ ;
– tout rayon passant par le foyer objet F ressortira parallèle à l’axe optique.
L’équation liée au modèle de lentille mince présenté figure 2.1.3 est la sui-
vante :1f
=1u
+1v
. (2.1.2)
Chaque point de l’objet ou de la scène considéré est projeté sur le plan
image formant ainsi l’image Is(x,y). Dans le cas où le plan image ne coïncide
pas avec le plan capteur d’une distance δ, alors l’énergie reçue du point P par
37

Chapitre 2 Systèmes d’acquisition
la lentille n’est pas concentrée en un point mais distribuée sur le plan capteur
formant une image floue Ib(x,y). La forme de cette distribution est fonction
de la forme de l’ouverture de l’objectif qui est considérée comme circulaire.
L’énergie est donc distribuée suivant une forme circulaire. Le rayon de cette
forme est approximé par l’équation :
r =δ.A
v. (2.1.3)
L’image floue Ib(x,u) ainsi formée sur le plan capteur est considérée comme
le résultat d’une convolution entre une image nette Is(x,y) et une fonction
d’étalement du point h(x,y) (PSF en anglais pour « Point Spread Function »).
[Pentland, 1987] conçoit la fonction d’étalement comme approximée par une
gaussienne :
h(x,y) =1
2πσ2h
e−
x2+y2
2σ2h . (2.1.4)
Le paramètre d’étalement de l’énergie σh est proportionnel au rayon r donc
plus la distance δ est grande, plus les hautes fréquences sont filtrées entrainant
une image de plus en plus floue.
Beaucoup de modélisations de la fonction d’étalement existent dans la lit-
térature mais l’approche de Pentland a l’intérêt d’être appliquée pour une re-
cherche de l’information de profondeur comme dans notre cas. Globalement,
la fonction d’étalement correspond souvent à un filtre passe-bas.
2.1.2 Profondeur de champ
C’est la notion essentielle sur laquelle jouer pour obtenir une reconstruction
3D la plus précise possible de la scène par « Shape from Focus ». Contraire-
ment au système sténopé, l’utilisation d’un système optique à base de lentille
n’entrainera pas une projection nette d’un seul plan objet mais d’un ensemble
de plans (figure 2.1.4).
En effet, chaque point de la scène est considéré comme net dès lors que le
diamètre de l’énergie distribuée sur le plan capteur est inférieur à C. Il s’agit
donc d’une zone de la scène d’une profondeur PdC dont la projection sur le
38

2.1 Généralités optiques
D v
Plan
objet
Plan
capteur Lentille
PdC
C
Dn Df
Figure 2.1.4: Schéma illustrant la profondeur de champ.
plan capteur est nette.
La profondeur de champ PdC est calculée par les équations suivantes :
Dn = D
1+C.A.D−f
f2
Df = D
1−C.A.D−f
f2
PdC = Df −Dn
, (2.1.5)
où D est la distance entre la scène et le système optique (mm) ;
Dn est la distance entre le premier plan net et l’objectif
(mm) ;
Df est la distance entre le dernier plan net et l’objectif
(mm) ;
C est le diamètre du cercle de confusion (mm) ;
A est l’ouverture relative du diaphragme ;
f est la focale de l’objectif (mm).
L’équation simplifiée est la suivante :
PdC =2.A.C.f2.D.(D −f)f4 −A2.C2.(D −f)2
. (2.1.6)
La profondeur de champ est donc dépendante de quatre paramètres : la
39

Chapitre 2 Systèmes d’acquisition
focale, l’ouverture du diaphragme, la distance d’acquisition et le diamètre du
cercle de confusion. Ces paramètres, ainsi que leurs effets sur l’image acquise
et la profondeur de champ, sont détaillés dans les prochains paragraphes.
Focale
La focale f de l’objectif utilisé est exprimée en millimètre et correspond
à la distance focale. Le choix de ce paramètre est souvent lié à la dimension
souhaitée de la scène à visualiser. En effet, à chaque distance focale correspond
un angle de champ particulier qui sera grand pour une focale courte et petit
pour une focale longue d’après l’équation suivante :
α = 2.arctan(d
2.f), (2.1.7)
où f est la distance focale (mm) et d la diagonale du capteur (mm).Une scène
de dimension élevée est acquise par un objectif de focale courte alors qu’une
scène de dimension réduite l’est par un objectif de focale élevée. On retrouve
ici le phénomène communément appelé « zoom » qui n’est rien d’autre qu’une
augmentation de la distance focale.
Plus la focale est courte et plus la quantité de lumière captée est importante
du fait de l’élargissement du champ de vue. Cet effet est pris en compte lors
de la conception des objectifs en diminuant le diamètre réel de l’ouverture
proportionnellement à la focale. Ainsi, un éclairement constant est obtenu
pour une même valeur d’ouverture mais une focale différente.
Pour en revenir à la profondeur de champ, celle-ci est affectée par une
variation de la distance focale qui est le paramètre l’impactant le plus celle-
ci du fait de l’ordre supérieur dans l’équation 2.1.6 par rapport aux autres
paramètres. Ainsi, une petite augmentation de la focale entraine une forte
diminution de la profondeur de champ.
Ouverture
Par convention, l’ouverture relative A est exprimée comme étant A = f/D
avec f la focale et D le diamètre de l’objectif (nommé « F − Number » en
40

2.1 Généralités optiques
anglais). L’ouverture relative varie selon une plage dépendante de l’objectif
selon une suite géométrique de raison√
2. Par exemple, A = 1.4, 2, 2.8... 16
où A = 1.4 correspond à une grande ouverture du diaphragme alors qu’une
valeur plus grande (A = 16) indique une ouverture plus faible où, pour chaque
incrémentation de A, deux fois moins de lumière traverse l’objectif (figure
2.1.5). La valeur de cet indice est la valeur à utiliser dans la formule de calcul
de la profondeur de champ (équation 2.1.6). Ainsi, plus l’ouverture relative A
est faible et plus la profondeur de champ est réduite.
f/2.8 f/4 f/5.6 f/8
Figure 2.1.5: Exemples d’ouvertures relatives.
Distance
La distance D est la distance de travail entre l’objectif et le point de la scène
considérée. Elle est définie comme la distance entre l’objectif et le plan objet le
plus net. Cette distance est corrélée à la valeur de réglage de la bague de mise
au point de l’objectif également appelée « focus ». En règle générale, le réglage
de cette distance de mise au point permet de faire coïncider le plan objet avec
le point de l’espace où la netteté est souhaitée. En photographie, la mise au
point peut être automatique (« Autofocus » en anglais) et de comportement
similaire au phénomène d’accommodation de l’œil humain, c’est-à-dire que le
plan objet net coïncide automatiquement sur le point de l’espace considéré.
Mécaniquement, une variation du focus est réalisée par une translation du
réseau de lentilles constituant l’objectif afin de le rapprocher ou l’éloigner
du capteur. Ainsi, plus la distance de mise au point est proche et plus la
profondeur de champ est réduite.
41

Chapitre 2 Systèmes d’acquisition
Cercle de confusion
A l’origine en photographie, le diamètre du cercle de confusion correspon-
dait au diamètre des plus petits points juxtaposés identifiables à l’œil nu d’une
distance d’environ un mètre. On retrouvait également l’utilisation de la for-
mule dite de Zeiss considérant le diamètre de ce cercle comme égal à d/1730,
avec d le diamètre de la surface photosensible. Depuis l’avènement des cap-
teurs numériques (CCD ou CMOS), les fabricants conçoivent le diamètre du
cercle de confusion comme étant de la même taille qu’un pixel composant le
capteur [Falco, 2010].
Ainsi, d’après la formule 2.1.6 et la figure 2.1.3, plus le diamètre du cercle
de confusion est petit et plus la profondeur de champ est faible.
En résumé, la profondeur de champ diminue lorsque la longueur focale aug-
mente, la distance de mise au point diminue, le diamètre d’ouverture du dia-
phragme augmente et celui du cercle de confusion diminue.
Les changements de focale et de distance de travail ont également pour effet
une modification du champ de vue (« Field of View » en anglais), c’est-à-dire
des dimensions de la scène visualisée. Celui-ci est également dépendant du
type de capteur utilisé comme l’indiquent les équations suivantes :
w
W=
h
H=
f
D, (2.1.8)
W =w.D
f, (2.1.9)
H =h.D
f, (2.1.10)
42

2.1 Généralités optiques
où D est la distance de mise au point (mm) ;
w est la largeur du capteur (mm) ;
h est est la hauteur du capteur (mm) ;
W est la largeur de la scène (mm) ;
H est la hauteur de la scène (mm) ;
f est la focale de l’objectif (mm).
Ainsi, un exemple de la profondeur de champ et du champ de vue acces-
sible en fonction du type d’objectif est illustré tableau 2.1. Pour les calculs,
on considère la caméra utilisée dans le système expérimental (section 2.2)
constituée d’un capteur 1/2 pouce (w = 6.4mm et h = 4.8mm) dont les pixels
mesurent 4.65µm. On remarque qu’une faible profondeur de champ va de pair
avec une diminution du champ de vue.
25mm f1.4 35mm f1.6 50mm f2D L H PdC L H PdC L H PdC
500 128 96 4.9 91.4 68.5 2.8 64 48 1.67600 153.6 115.2 7.2 109.7 82.3 4.1 76.8 57.6 2.4700 179.2 134.4 9.8 128 96 5.6 89.6 67.2 3.4800 204.8 153.6 12.9 146.3 109.7 7.4 102.4 76.8 4.4900 230.4 172.8 16.4 164.5 123.4 9.4 115.2 86.4 5.71000 256 192 20.3 182.8 137.1 11.7 128 96 7
Tableau 2.1: Champ de vue (Largeur et Hauteur) et profondeur de champ(PdC) en fonction du type d’objectif (valeurs en mm).
2.1.3 Acquisition d’une séquence d’images
Notre objectif est le développement du système d’acquisition de la séquence
d’images nécessaire à une reconstruction 3D par « Shape from Focus ». Le
principe d’acquisition de la séquence d’images repose sur le balayage de la
scène par le plan objet. Ce plan objet est en réalité l’association d’un nombre
fini de plans constituant la profondeur de champ.
Ainsi, la précision de l’information de profondeur (Z) va dépendre direc-
tement de cette profondeur de champ induite par les paramètres optiques.
En effet, plus la profondeur de champ sera petite et plus la précision en Z
43

Chapitre 2 Systèmes d’acquisition
sera importante. La contrainte est un nombre d’images nécessaires bien plus
important. Cela revient donc à un compromis entre contraintes d’acquisition,
précision et champ de vue souhaité.
Ce balayage de la scène peut être obtenu de différentes façons.
1. Déplacer l’objet à reconstruite par rapport au système d’acquisition fixe ;
2. Déplacer le système d’acquisition par rapport à la scène ;
3. Faire varier le plan objet par la variation de la distance de mise au point ;
4. Faire la varier la distance focale par l’utilisation d’un objectif à focale
variable (zoom).
On peut d’ores et déjà éliminer la quatrième solution du fait de la modification
importante de la profondeur de champ entrainée par un changement de focale.
Une variation de la distance de mise au point engendre une variation de la
profondeur de champ minime tout en permettant un balayage de la scène
par le plan objet avec un système d’acquisition fixe. De plus, ces solutions
entrainent une variation du grossissement entre chaque image de la séquence.
Ceci implique la nécessité d’un recalage de toutes les images de la séquence.
Les solutions de correction de ce grossissement sont étudiées sous-section 2.4.2.
Bien entendu, un déplacement de la scène n’est, dans notre cas, pas envisa-
geable contrairement à un déplacement du système d’acquisition. C’est cette
dernière solution qui, même si elle implique également des effets de grossisse-
ment, a été retenue dans un premier temps. La raison principale de ce choix
est la volonté de création d’un premier système expérimental afin de tester la
faisabilité de cette méthode de reconstruction 3D.
2.2 Système expérimental
2.2.1 Vue d’ensemble
La solution de déplacement du système optique a été retenue afin d’obtenir
la séquence d’images représentant un balayage de la scène par le plan objet.
Ce procédé d’acquisition est schématisé figure 2.2.1.
44

2.2 Système expérimental
Carte contrôle
moteur
Système d’acquisition M
Scène Système de
déplacement
linéaire
PC
Figure 2.2.1: Schématisation du procédé d’acquisition.
Ainsi, on peut scinder l’ensemble du procédé d’acquisition en deux grandes
parties : la partie optique permettant les acquisitions en tant que telles et la
partie électronique permettant le déplacement de l’ensemble optique. L’uti-
lisateur contrôle l’acquisition et le déplacement par le biais d’un ordinateur.
Les deux parties sont détaillées ci-dessous.
2.2.2 Partie optique
L’ensemble des éléments permettant l’acquisition des images est illustré
figure 2.2.2. Il est constitué de plusieurs éléments listés ci-dessous avec leurs
caractéristiques.
Caméra
La caméra utilisée dans ce système est une caméra couleur à filtre de Bayer
superposant un capteur CCD (Imaging Source DBK 41BU02.H). Le capteur
est de type 1/2” (6.4 × 4.8 mm) avec une taille de photosite de 4.65 µm2. La
45

Chapitre 2 Systèmes d’acquisition
Figure 2.2.2: Ensemble constituant la partie optique.
définition finale des images est de 1280 par 960 pixels (1.2 mégapixels). Le
transfert et la commande de la caméra sont réalisés par le protocole USB 2.0.
Objectif
L’objectif associé à la caméra est un objectif de focale 50 mm et d’ouverture
relative f1.4. La distance de mise au point minimum de cet objectif est de 82
cm.
Illuminant
Afin de ne pas dépendre des conditions d’illumination extérieures mais sur-
tout de permettre un éclairement constant tout au long du processus d’acqui-
sition, deux diodes électroluminescentes sont disposées de part et d’autre de la
caméra. Les diodes, de température de couleur de 4000 kelvins (blanc neutre),
ont une puissance de 3 watts et sont montées sur un dissipateur thermique en
46

2.2 Système expérimental
aluminium. Cette couleur permet de couvrir l’ensemble du spectre du visible
en ne privilégiant pas de longueurs d’onde particulières, ce qui permet une
utilisation relativement générale sur différents types de scène.
En considérant une distance de mise au point de 1 mètre, la scène couverte
par le système d’acquisition est de 12.8 cm par 9.6 cm avec une profondeur
de champ de 5 mm. Le diaphragme de l’objectif est ouvert au maximum,
c’est-à-dire à l’ouverture relative f1.4.
2.2.3 Partie électronique
De la même façon que la partie optique, la partie électronique est constituée
de plusieurs éléments permettant le déplacement du système d’acquisition.
Ce déplacement se doit d’être commandé précisément et facilement par un
ordinateur.
Système de déplacement
Le déplacement linéaire est assuré par un module de guidage linéaire (Drylin
SHT-12-AWM-1000). Long d’un mètre, un système de vis sans fin trapézoï-
dale permet l’entrainement de la partie mobile sur laquelle est fixée la partie
optique. La charge axiale maximale entrainée par le module de guidage dé-
pend du couple du moteur utilisé et suit l’abaque constructeur illustré figure
2.2.3.
Moteur
Le couplage entre l’axe moteur et l’axe du système de guidage est direct
par montage axial. Ainsi, les recommandations de la figure 2.2.3 sont res-
pectées puisque les forces appliquées à la vis sans fin sont essentiellement de
type axial lors d’un couplage direct. Le moteur choisi doit avoir un couple
permettant l’entrainement d’une charge maximale de 2 kg (partie optique).
D’après l’abaque, une charge de 2 kg (environ 20 N) est entrainée dès lors que
le couple du moteur est de 0.3 Nm. Le type de moteur utilisé dans notre cas
est un moteur pas à pas. Contrairement à d’autres types de moteurs (cou-
rant continu, servomoteur ...), le contrôle de la position est plus précis pour
47

Chapitre 2 Systèmes d’acquisition
0
0,5
1
1,5
2
2,5
0 100 200 300 400 500 600
Co
up
le c
om
man
de
(N
m)
Charge axiale (N)
Figure 2.2.3: Couple moteur nécessaire au module de guidage en fonction dela charge axiale entrainée.
un moteur pas à pas du fait que la commande d’une impulsion entraine un
léger déplacement appelé pas. Ainsi la position est contrôlée précisément et
est connue à tout instant alors qu’un moteur à courant continu, par exemple,
nécessite un codeur pour obtenir un retour d’information sur celle-ci. C’est
cette importante précision qui rend ces moteurs très utilisés dans des sys-
tèmes de positionnement. On retrouve plusieurs types de moteurs pas à pas :
les moteurs à aimants permanents, à réluctance variable et les hybrides. Le
premier est bon marché mais d’un nombre de pas par tour peu important.
Le couple d’utilisation est plus élevé qu’un moteur à réluctance variable mais,
contrairement à ceux-ci, présente un couple résiduel lorsque le moteur est hors
tension. La résolution des moteurs à réluctance variable est meilleure mais de
couple plus faible que les moteurs à aimants permanents.
Les moteurs hybrides combinent les deux technologies. Ainsi, ce sont des
moteurs avec un meilleur couple, une vitesse plus élevée et une résolution
importante. Notre moteur est un moteur 5V, 1A développant un couple de
500 mNm. La résolution est de 200 pas par tour en mode pas entier et 400 pas
par tour en mode demi-pas. A raison d’un déplacement du module de guidage
48

2.2 Système expérimental
de 2 mm pour une rotation de l’axe de un tour, on obtient une précision
de 5 µm en mode demi-pas et 10 µm en mode pas entier. La précision est
donc extrêmement importante avec ce type de moteur. A noté que le mode
demi-pas implique un couple deux fois plus important qu’en mode pas entier
pour une vitesse deux fois plus faible. En effet, le demi-pas est obtenu par une
alimentation intermédiaire des bobines permettant une rotation du rotor de
0.9 degré au lieu de 1.8 degrés en mode pas entier.
Cartes de commande et de puissance
La partie électronique nécessaire à la gestion du déplacement par l’utilisa-
teur est constituée de deux cartes. La première est la carte de commande dont
l’architecture tourne autour d’un microcontrôleur (Microchip PIC 18F4550).
L’objectif de cette carte est l’interfaçage entre la carte de puissance et le
logiciel de commande. Une liaison USB entre l’ordinateur et la carte de com-
mande permet le transfert des informations utiles à la commande du moteur.
Ces informations sont la marche ou l’arrêt du moteur, son sens et sa vitesse de
rotation, le choix du mode pas entier ou demi-pas ainsi que le nombre de pas
(ou de tours) désiré. Ces informations sont ensuite transmises à la carte de
puissance chargée de délivrer les bons signaux de commandes au moteur. Cette
séparation de la partie commande et puissance a une double justification. La
première est que le moteur, pour un couple maximum, nécessite un courant de
1A qui ne peut pas être fourni directement par les sorties du microcontrôleur
limitées à 20mA. Une partie puissance assure également une tension stabilisée
d’alimentation du moteur. La seconde raison est la sécurisation de la partie
commande en cas de dysfonctionnement de la partie puissance.
Alimentation
L’alimentation des diodes électroluminescentes ainsi que des cartes électro-
niques est assurée par une batterie 12V de capacité 12Ah. À raison de 700mA
de courant pour les LEDs, 1A pour le moteur et quelques milliampères pour
la carte de puissance (la carte de commande étant alimentée par la liaison
49

Chapitre 2 Systèmes d’acquisition
Figure 2.2.4: Vue d’ensemble du système.
USB), soit environ 2A de consommation, la durée de fonctionnement continu
est de 6 heures. Cette alimentation permet donc au moins une journée d’utili-
sation sachant que le moteur n’est pas alimenté continuellement. La conversion
12V/5V nécessaire pour l’alimentation de la carte de puissance et du moteur
est assurée par un convertisseur 9.2-18V/5V.
L’ensemble constitué des deux parties présentées précédemment est inté-
gré dans un châssis en aluminium muni de panneaux opaques (figure 2.2.4).
Ces panneaux permettent une isolation de la scène considérée par rapport à
l’illumination extérieure et contre les mouvements des éléments constituant la
scène dus au vent lors de la procédure d’acquisition. La partie supérieure du
châssis est intégrable à la partie inférieure, munie de poignées, afin de faciliter
le transport et diminuer l’encombrement du système.
50

2.2 Système expérimental
2.2.4 Contraintes du système expérimental
Lors du mouvement, les vibrations créées par le déplacement de la par-
tie optique entrainent un léger déplacement du centre optique entre chaque
image de la séquence. Ceci est problématique puisque, dans le cadre de la
reconstruction 3D par « Shape from Focus », chaque pixel doit correspondre
au même point de la scène dans chacune des images de la séquence. La sé-
quence d’images nécessite donc un recalage afin d’obtenir la correspondance
entre les pixels. Le recalage d’images est un problème récurrent en imagerie. Il
consiste essentiellement à établir une relation géométrique entre les représen-
tations de deux images permettant une mise en correspondance de celles-ci.
Cette relation géométrique peut être de type rigide, dans le cas d’objets non-
déformables, ou non-rigide dans le cas contraire. Globalement, les méthodes
de recalage sont réparties en deux familles : les méthodes géométriques et
iconiques.
Les méthodes géométriques se basent sur l’identification des caractéristiques
géométriques communes aux images à recaler. Ces caractéristiques sont sou-
vent des primitives de l’image comme les arrêtes ou des coins dont les coor-
données spatiales sont appariées afin de déterminer la transformation entre
les deux images.
Les méthodes iconiques consistent à optimiser un critère de ressemblance
(mesure de similarité) fondé sur l’intensité des pixels des images, sans tenir
compte de la géométrie de celles-ci. La transformation recherchée est celle
pour laquelle la mesure de similarité est maximum. Ces méthodes sont souvent
divisées en trois parties : le choix de la mesure de similarité à utiliser (somme
des différences au carré, coefficient de corrélation, entropie mutuelle ...), le
type de transformation recherchée (rigide, affine, projective ...) et une méthode
d’optimisation assurant le lien entre les deux premières étapes.
Le domaine du recalage d’images est un domaine de recherche très vaste
et couvrant plusieurs domaines d’application. L’état de l’art est complexe du
fait du nombre de méthodes existantes et ne présente pas d’intérêt dans le
cadre de ces travaux. Cependant, afin de choisir une méthode adaptée à notre
problématique, il convient tout d’abord de définir quelle famille de techniques
51

Chapitre 2 Systèmes d’acquisition
de recalage convient. Dans notre cas, chacune des images de la séquence met
en évidence une zone nette différente du fait du balayage par la zone de pro-
fondeur de champ. Ainsi, les méthodes de recalage géométriques basées sur
une mise en correspondance de points d’intérêt ne sont pas adaptées. Les mé-
thodes iconiques basées sur l’information mutuelle entre les images semblent
beaucoup plus adaptées. Notre type de séquence d’images présente plusieurs
similitudes avec des séquences d’images de type IRM. Ainsi, on retrouve la
méthode basée sur l’information mutuelle de [Thévenaz et al., 1998] souvent
utilisée en imagerie médicale. L’intérêt principal de cette technique est sa ra-
pidité et sa convergence robuste vers l’estimation de la transformation liant
chaque image comme le précisent les études de [Zitova et Flusser, 2003, Gho-
lipour et al., 2007].
2.3 Système final
Ce premier système ayant permis la validation de la faisabilité de l’utilisa-
tion de la méthode de reconstruction 3D « Shape from Focus » (des exemples
de scènes reconstruites se trouvent chapitre 4.1.1), la conception d’un second
système entrainant l’achat de matériel spécifique a été effectuée.
Afin de s’affranchir du déplacement de la partie optique entrainant une
légère translation du centre optique, on s’est orientés vers le balayage de la
scène par la variation de la distance de mise au point. Comme expliqué à la
sous-section 2.1.2, une variation de cette distance induit une modification de
la profondeur de champ. Cependant, tant que la profondeur de champ est plus
faible que la précision de l’estimation de la profondeur recherchée, ce type de
déplacement est parfaitement utilisable. Le détail de l’influence des différentes
variations de mise au point est expliqué sous-section 2.4.3.
De façon à réaliser cette variation de la distance de mise au point précisé-
ment et surtout de manière répétable, l’utilisation d’un objectif motorisé est
nécessaire. Cependant, un objectif avec une bague de réglage de la distance de
mise au point motorisée n’est pas fréquent contrairement à ceux avec ouverture
et focale motorisées. Le fabricant Qioptiq propose des objectifs conçus pour
52

2.3 Système final
des capteurs à hautes définitions ainsi qu’une version motorisée de ces objec-
tifs. Ainsi, nous avons opté pour un objectif de focale 35 mm et d’ouvertures
relatives f1.6−16 (Qioptiq MeVis-Cm figure 2.3.1). Cet objectif de monture C
assure une correction linéaire de 450 nm à 900 nm et est compatible pour des
capteurs ayant une diagonale maximum de 1”. Les variations de l’ouverture
et de la mise au point sont motorisées et la commande passe par l’utilisation
d’un module de contrôle. Ce module de contrôle permet la commande de l’ob-
jectif par une liaison RS-232 avec l’ordinateur. Un jeu d’instructions simples
permet la variation de la position de la bague de réglage de l’ouverture et de
mise au point. Dans notre cas, la profondeur de champ souhaitée étant la plus
faible possible, on veillera à toujours avoir le diaphragme ouvert au maximum
(soit à l’ouverture relative f1.6).
Toujours dans l’optique d’une profondeur de champ réduite, le choix de la
caméra (IDS UI-2280SE figure 2.3.1) s’est porté sur un capteur CCD couleur
à filtre de Bayer 2/3 pouces (8.446 × 7.066 mm) de définition maximale 2448
par 2048 (5 mégapixels) dont les photo-éléments mesurent 3.45 µm2. Cette
petite taille de pixel occasionne un cercle de confusion très faible ayant pour
effet une diminution de la profondeur de champ. La taille de capteur supé-
rieure comparée au premier système induit également une augmentation du
champ de vue disponible de la scène considérée. La liaison de la caméra avec
l’ordinateur est assurée par protocole USB.
Figure 2.3.1: Objectif et caméra utilisés.
A une distance de mise au point de 1 mètre, cet ensemble objectif/caméra
génère une profondeur de champ de 8.7 mm et un champ de vue de 25 par 19
53

Chapitre 2 Systèmes d’acquisition
cm. Un autre avantage de ce second système est le contrôle direct de la caméra
et de l’objectif par l’ordinateur sans avoir de partie électronique conséquente.
Ceci permet par ailleurs une réduction de l’encombrement général du système
d’acquisition.
2.4 Calibrage
Permettre une variation de plusieurs paramètres étant la fonction princi-
pale des deux systèmes d’acquisitions conçus, ceci entraine invariablement un
besoin de correction. De plus, aucun objectif n’étant parfait, un calibrage
de celui-ci permet une correction des éventuelles distorsions. Les deux pre-
mières sous-sections suivantes présentent les corrections communes aux deux
systèmes. La troisième sous-section est dédiée au système final puisque pré-
sentant l’étalonnage de l’objectif motorisé.
2.4.1 Correction des aberrations
Les aberrations occasionnées par l’objectif utilisé peuvent être géométriques
ou chromatiques. Parmi les aberrations géométriques on retrouve :
– les aberrations sphériques : ce type d’aberration survient lorsque les
rayons passant par les bords de l’objectif ne se focalisent pas à la même
distance que ceux traversant l’optique au centre. Il en résulte une perte
de netteté. Ce type d’aberration est corrigé par l’utilisation de lentilles
asphériques dans la conception de l’objectif.
– la coma : ce défaut apparait pour des points de la scène non alignés avec
l’axe optique qui seront focalisés sous forme de comète. La conception
d’objectif avec plusieurs groupes de lentilles permet de compenser ce dé-
faut.
– l’astigmatisme : proche de la coma, ce défaut a pour effet une focalisation
différente des rayons dans le plan sagittal de l’axe optique (focale sagit-
tale) et ceux dans le plan tangentiel (focale tangentielle). Les objectifs
actuels sont exempts de ce défaut et sont appelés anastigmats.
– la courbure de champ : ceci correspond à une projection d’un plan de la
54

2.4 Calibrage
scène sous forme parabolique sur le capteur. Comme l’astigmatisme, ce
défaut est corrigé par les objectifs actuels.
– les distorsions : on retrouve les distorsions tangentielles et les distorsions
radiales. Les distorsions tangentielles apparaissent lors d’un mauvais ali-
gnement des différentes lentilles composant l’objectif. Ces distorsions ne
sont donc pas présentes pour des objectifs de précision. Les distorsions
radiales peuvent être de deux types : en barillet ou en coussinet. La pre-
mière a pour effet une transformation des lignes en courbes incurvées vers
l’extérieur de l’image. La seconde est l’inverse, avec des courbes incur-
vées vers l’intérieur de l’image. La distorsion en barillet est de plus en
plus présente à mesure que la focale est courte. Ainsi, un objectif de type
« fisheye » aura de très fortes distorsions. Inversement, les téléobjectifs
de grande focale font état de distorsions en coussinet. Même si ces phé-
nomènes sont en partie corrigés par l’utilisation de lentilles asphériques,
un traitement a posteriori est nécessaire pour les corriger.
Les aberrations chromatiques correspondent quant à elles à la différence
de focalisation des rayons lumineux de longueurs d’onde différentes. En ef-
fet, comme expliqué section 2.1.1, un rayon lumineux changeant de milieu est
réfracté suivant un angle dépendant de l’indice de réfraction du milieu. Ce-
pendant, cet indice de réfraction dépend également de la longueur d’onde à
laquelle correspond ce rayon incident puisqu’il augmente lorsque la longueur
d’onde diminue. Ainsi, un rayon de longueur d’onde 400 nm (bleu) aura un
indice de réfraction plus élevé qu’un rayon de longueur d’onde 650 nm (rouge).
C’est d’ailleurs sur ce principe que se base l’utilisation d’un prisme permettant
la dispersion des longueurs d’onde.
Notre objectif étant un objectif de précision spécialement conçu pour des
applications de mesure, il permet une élimination d’un certain nombre d’aber-
rations ou tout du moins une atténuation de leur impact. Ainsi, les aberra-
tions chromatiques sont corrigées par la correction linéaire de 450 à 900 nm
qui permet une utilisation de l’objectif dans le visible et le très proche in-
frarouge sans crainte d’aberrations. Concernant les aberrations géométriques,
elles sont corrigées par la conception particulière de l’objectif mais, concernant
les distorsions éventuelles, il convient de vérifier si un traitement a posteriori
55

Chapitre 2 Systèmes d’acquisition
est nécessaire. Précisons que, outre les distorsions, les autres aberrations sont
atténuées à mesure que le diamètre du diaphragme diminue. Cependant, sou-
haitant obtenir une profondeur de champ la plus faible possible, une ouverture
maximum du diaphragme est nécessaire.
Pour cela, l’outil de calibrage développé par [Bouguet, 2010] pour le logiciel
Matlab est utilisé. Cet outil implémente la méthode de calibrage proposée
par [Zhang, 2000]. La procédure de calibrage commence par l’acquisition de
plusieurs images d’une mire (figure 2.4.1) en faisant varier la position de celle-
ci.
−500
50 0
100
200
300
400
500
600
−60
−40
−20
0
20
40
104
51
873
2
6
9
Zc
Yc
Oc
Figure 2.4.1: Mire de calibrage et projection des positions utilisées.
Les points d’intérêt des images sont détectés puis les paramètres intrin-
sèques (focale, centre optique) et extrinsèques (position repère monde de la
caméra par rapport à la scène) sont déterminés. Les coefficients de distorsions
radiales et tangentielles sont ensuite estimés avant une optimisation de l’esti-
mation des différents paramètres par minimisation de la fonction de maximum
de vraisemblance.
Le vecteur estimé contenant les coefficients de distorsions se présente sous
la forme kc = [k1 k2 p1 p2 k3] avec k1, k2 et k3 les coefficients de distorsions
radiales et p1, p2 les coefficients de distorsions tangentielles. On ne considèrera
pas les coefficients de distorsions tangentielles dans notre calibration.
Le modèle de distorsions radiales du second ordre utilise seulement le coef-
ficient k1 pour estimer les nouvelles coordonnées de l’image sans distorsions
[Tsai, 1987]. Zhang préconise l’utilisation du modèle de distorsions radiales du
56
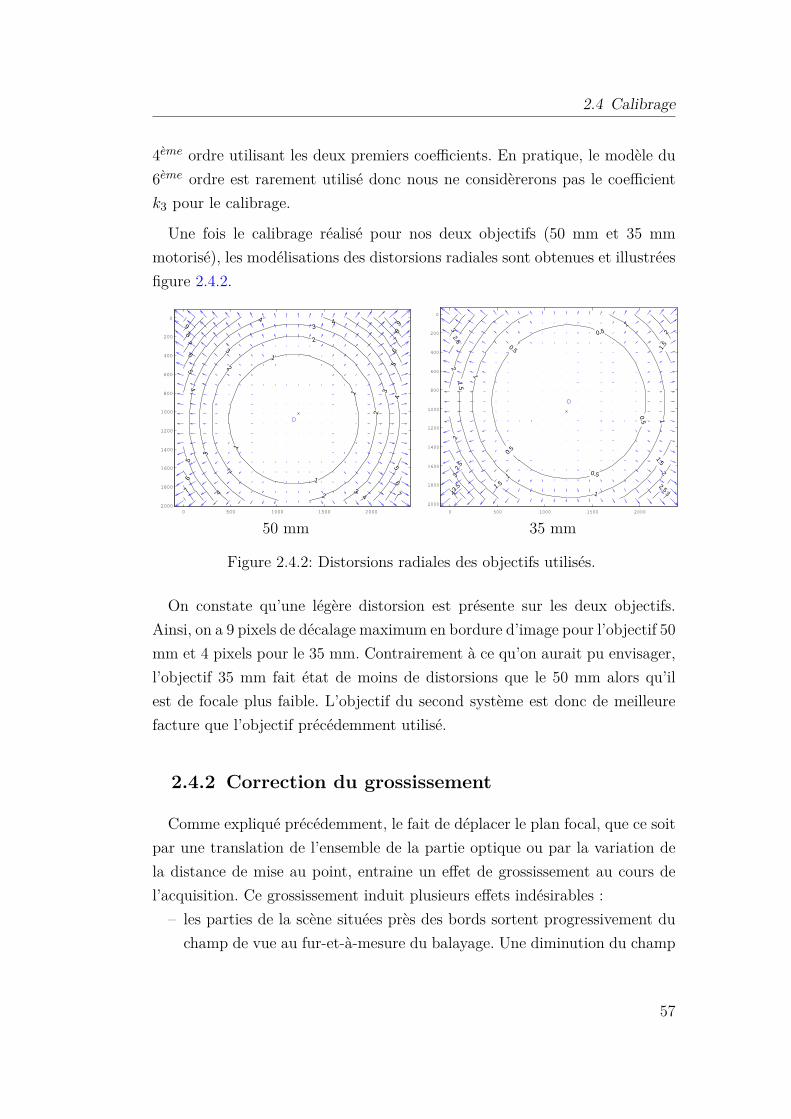
2.4 Calibrage
4eme ordre utilisant les deux premiers coefficients. En pratique, le modèle du
6eme ordre est rarement utilisé donc nous ne considèrerons pas le coefficient
k3 pour le calibrage.
Une fois le calibrage réalisé pour nos deux objectifs (50 mm et 35 mm
motorisé), les modélisations des distorsions radiales sont obtenues et illustrées
figure 2.4.2.
0 500 1000 1500 2000
0
200
400
600
800
1000
1200
1400
1600
1800
2000
11
1
1
2
2
2
2
2
3
3
3
3
34
4
4 4
4
4
5
5
55
6
6 66
7
7 77
8 89 9
0 500 1000 1500 2000
0
200
400
600
800
1000
1200
1400
1600
1800
2000
0.5
0.5
0.5
0.5
0.5
1
1
1
1
11.5
1.5
1.5
1.5
2
2
2
2
2.5
2.5
2.5
3
3
33.5
4
50 mm 35 mm
Figure 2.4.2: Distorsions radiales des objectifs utilisés.
On constate qu’une légère distorsion est présente sur les deux objectifs.
Ainsi, on a 9 pixels de décalage maximum en bordure d’image pour l’objectif 50
mm et 4 pixels pour le 35 mm. Contrairement à ce qu’on aurait pu envisager,
l’objectif 35 mm fait état de moins de distorsions que le 50 mm alors qu’il
est de focale plus faible. L’objectif du second système est donc de meilleure
facture que l’objectif précédemment utilisé.
2.4.2 Correction du grossissement
Comme expliqué précédemment, le fait de déplacer le plan focal, que ce soit
par une translation de l’ensemble de la partie optique ou par la variation de
la distance de mise au point, entraine un effet de grossissement au cours de
l’acquisition. Ce grossissement induit plusieurs effets indésirables :
– les parties de la scène situées près des bords sortent progressivement du
champ de vue au fur-et-à-mesure du balayage. Une diminution du champ
57

Chapitre 2 Systèmes d’acquisition
de vue apparait ;
– la zone locale utilisée dans chaque image pour la mesure de netteté d’un
pixel ne représente pas les mêmes informations spatiales.
En pratique, ce grossissement peut être négligé pour des déplacements très
courts comme c’est le cas en microscopie. Cependant, l’aspect macroscopique
de notre application nécessite une correction de ce grossissement. Si aucune
correction n’est apportée à la séquence d’images, les mesures de netteté biai-
sées entrainent une reconstruction 3D erronée de la scène.
On retrouve dans la littérature plusieurs solutions pour corriger ou s’affran-
chir de ce grossissement.
Redimensionnement des images
Proposé par [Darrell et Wohn, 1988], le principe est de réaliser la mise
à l’échelle des images a posteriori de l’acquisition. Bien que cette méthode
soit simple à mettre en œuvre et adaptée aux objectifs à focale fixe, elle
a des inconvénients. Du fait du changement d’échelle appliqué aux images
nécessitant une interpolation et un rééchantillonnage, une perte d’information
apparait. Cependant, une même zone autour d’un pixel représente bien la
même information spatiale pour la mesure de netteté.
Compensation du grossissement
D’abord proposée par Darell mais non implémentée par celui-ci, cette mé-
thode est reprise et utilisée par [Willson et Shafer, 1991]. Leur solution est
de compenser le grossissement, résultant du déplacement, par un changement
de la distance focale dans le but de toujours visualiser la même zone spatiale.
Pour cela, un modèle calibré du comportement du changement de la focale
(zoom) en fonction du déplacement (du système ou dans leur cas de la distance
de mise au point) est réalisé (figure 2.4.3).
L’inconvénient majeur de cette solution est le besoin d’un objectif à focale
variable motorisée qui entraine par ailleurs une modification de la profondeur
de champ due au changement de focale. La profondeur de champ est également
modifiée indirectement lors du changement de focale car l’ouverture n’est pas
58

2.4 Calibrage
Figure 2.4.3: Grossissement relatif en fonction de la focale et de la distancede mise au point [Willson et Shafer, 1991].
identique pour toutes les variations de focale de ce type d’objectif. Ceci est dû
au fait que la quantité de lumière passant par l’objectif n’est pas la même en
fonction de la focale utilisée. Une adaptation de l’ouverture est donc nécessaire
afin d’obtenir une quantité de lumière constante passant par l’objectif.
Utilisation d’un objectif télécentrique
[Watanabe et Nayar, 1995] proposent de modifier mécaniquement un ob-
jectif en lui associant un second système de diaphragme positionné au niveau
du plan focal. L’adjonction de cette ouverture permet l’obtention du procédé
télécentrique. En effet, si le diaphragme d’ouverture se situe dans le plan focal
du système optique qui le précède, les rayons lumineux passant par l’objec-
tif et focalisés sur le capteur peuvent être considérés comme provenant de
59

Chapitre 2 Systèmes d’acquisition
l’infini et donc parallèles les uns aux autres. Ce type d’objectif permet donc
une taille d’image identique à mesure du déplacement sous réserve de rester
dans une certaine profondeur. L’effet de grossissement n’est plus présent, de
même que les distorsions radiales qui sont quasi-nulles avec ce type d’objectif.
Cependant, la scène visualisée par ces objectifs est souvent petite (quelques
centimètres carrés) et ces objectifs induisent une profondeur de champ un peu
plus élevée que les objectifs standards.
Adaptation de la fenêtre de mesure
Puisque qu’une variation du grossissement de la scène visualisée apparait
lors de l’acquisition, [Nair et Stewart, 1992] proposent d’adapter la taille de la
fenêtre de mesure de netteté locale en fonction du changement de résolution
spatiale. Ainsi, la mesure de netteté est toujours appliquée à la même zone
spatiale pour chaque pixel. L’inconvénient est le nombre d’échantillons non
constant pour la mesure de netteté qui ne permet pas de comparer celles-ci de
façon rigoureuse. De plus, une augmentation de la taille de la fenêtre d’ana-
lyse a pour effet une diminution de la résolution spatiale et de la profondeur
bien qu’étant plus robuste quant à l’évaluation de la zone la plus nette. Donc
une modification de la taille de la fenêtre d’analyse ne permet pas d’avoir une
carte de profondeur homogène au niveau de sa résolution.
Dans notre cas, la correction du grossissement passe par une méthode à
l’interface du redimensionnement des images et l’adaptation de la fenêtre de
mesure. Tout d’abord l’estimation du grossissement est aisée du fait que le
déplacement entre deux images est connu précisément (∆d dans le schéma
illustré figure 2.4.4).
Le coefficient de grossissement hn/h1 peut donc être déterminé par le théo-
rème de Thalès :hn
h1=
d
d+∆d. (2.4.1)
Ce coefficient est calculé pour chaque image et est utilisé pour la redimen-
sionner afin de afin de toujours visualiser la même zone spatiale. Une mise à
l’échelle de toutes les images est ensuite réalisée en appliquant un redimen-
60

2.4 Calibrage
H H h1 hn
d s d+Δd s
Figure 2.4.4: Schématisation du grossissement entre la 1ere et la nieme image.
sionnement à chaque image. Ce redimensionnement est calqué en fonction de
la taille de l’image la plus éloignée du capteur. Ainsi, une sous-interpolation
des autres images est appliquée. L’information est certes dégradée mais appli-
quer un redimensionnement dans ce sens ne génère pas d’informations erronées
contrairement à une sur-interpolation. La définition du capteur étant de base
élevée, une réduction de la taille des images implique toujours une bonnne
définition. On obtient de ce fait une séquence d’images représentant la même
scène avec un déplacement de la zone nette et permettant une mesure de
netteté sur les mêmes zones spatiales.
2.4.3 Étalonnage de l’objectif motorisé
Contrairement au premier système d’acquisition qui permet un pas constant
entre chaque image comme, par exemple, tous les centimètres, l’objectif moto-
risé du second système nécessite un étalonnage afin de maitriser la commande.
En effet, une rotation à intervalle constant de la bague de variation de dis-
tance de mise au point n’entraine pas une variation constante de cette distance
dans l’espace. Cette variation doit être cependant parfaitement maitrisée afin
de garantir une reconstruction 3D fidèle à la réalité. Effectivement, l’étape
de mesure de netteté permet de déterminer la position de l’image où chaque
pixel est le plus net et donc le pas séparant chaque image de la séquence doit
être connu.
L’objectif motorisé autorise une variation de la distance sur 94 positions de
la distance de mise au point minimum (45 mm selon constructeur) à l’infini.
61

Chapitre 2 Systèmes d’acquisition
Pour notre application, nous souhaitons balayer la scène considérée de la dis-
tance de mise au point la plus proche jusqu’à une distance de 1 mètre. Ainsi,
pour chaque position du moteur, la distance de mise au point correspondante
est déterminée et représentée figure 2.4.5.
2 6 10 14 18 22 26 30 34 38 42 46 50 54 58 62424752576267727782879297
102
Position du moteur de mise au point
Dis
tanc
e ob
ject
if / p
lan
obje
t (cm
)
ApproximationMesures réelles
Figure 2.4.5: Distance de mise au point en fonction de la position du moteur.
Pour déterminer avec précision à quelle distance exacte correspond une
position moteur, un opérateur de mesure de netteté (chapitre 3) est utilisé afin
de mesurer précisément cette distance. Ainsi, pour chaque position moteur on
obtient une courbe analogue à celle illustrée figure 2.4.6.
On remarque effectivement une non-linéarité entre l’évolution de la distance
de mise au point en fonction de la position du moteur. De plus, après mesure,
la distance minimum de mise au point est de 42.1 cm et non 45 cm.
Suite à l’étalonnage de l’objectif, il est intéressant de calculer la profondeur
de champ (eq. 2.1.6) associée à chaque distance de mise au point. L’évolution
de celle-ci est représentée figure 2.4.7.
Avec un balayage de la scène inférieur à 1 mètre, la profondeur de champ
n’excède pas 7.5 mm. Ceci permet une précision de l’estimation de la pro-
fondeur par la méthode « Shape from Focus » car cela garantit un non re-
couvrement des mêmes zones nettes pour deux images successives. En effet,
62

2.5 Procédure d’acquisition
41 41.2 41.4 41.6 41.8 42 42.2 42.4 42.6 42.8 43 43.249
49.6
50.2
50.8
51.4
52
52.6
53.2
53.8
54.4
55
Distance objectif / plan objet (cm)
Mes
ure
de n
ette
té r
elat
ive
Mesures réellesApproximation
Figure 2.4.6: Mesure de netteté pour la 1ere position moteur.
l’espacement entre deux images est contrôlé de façon à être toujours supérieur
à la profondeur de champ.
Quant au champ de vue résultant d’un balayage de 42 cm jusqu’à 100 cm
de la scène, il varie respectivement de 9.5 par 8 cm (42 cm) jusqu’à 22.3 par
18.6 cm (100 cm).
2.5 Procédure d’acquisition
La procédure d’acquisition va dépendre principalement du type de scène
à visualiser ainsi que de la précision de la reconstruction souhaitée. Ainsi le
logiciel développé pour le contrôle du premier et du second système permet de
choisir le pas d’acquisition voulu, la distance de départ du balayage ainsi que
le nombre d’images à acquérir. Le choix du pas entre chaque acquisition va
être choisi en fonction de la profondeur de champ engendrée par le système.
63

Chapitre 2 Systèmes d’acquisition
42 47 52 57 62 67 72 77 82 87 92 97 1021
1.52
2.53
3.54
4.55
5.56
6.57
7.58
Distance objectif / plan objet (cm)
Pro
fond
eur
de c
ham
p (m
m)
ApproximationMesures réelles
Figure 2.4.7: Profondeur de champ en fonction de la distance de mise au point.
En effet, pour ne pas avoir d’effet de chevauchement des zones dans le plan
de netteté, le pas doit être choisi au minimum égal à la profondeur de champ.
Par exemple, pour une profondeur de champ de 1 cm, le déplacement minimal
entre deux images doit être de 1 cm. La distance de départ du balayage permet
de placer le premier plan de balayage au début de la scène à reconstruire. En-
fin, le nombre d’images à acquérir va évidemment dépendre de la profondeur
de reconstruction souhaitée de la scène considérée. Une fois l’ensemble des
paramètres choisis par l’utilisateur, l’acquisition est entièrement automatisée.
2.6 Conclusion
Dans ce chapitre, les deux systèmes permettant l’acquisition de la séquence
d’images nécessaire à une reconstruction 3D par la méthode « Shape from Fo-
cus » sont présentés. La compréhension des phénomènes optiques induits par
les caméras et objectifs utilisés est le point central de nos choix quant au di-
mensionnement des deux systèmes d’acquisition. L’automatisation de l’acqui-
sition permet une utilisation aisée des deux systèmes par des non spécialistes.
De plus, les deux systèmes sont complémentaires en fonction de l’application
64

2.6 Conclusion
visée. En effet, le premier système, bien qu’étant sujet à des erreurs d’ali-
gnement des images acquises, permet un changement d’objectif en fonction
de l’application visée. Le second système quant à lui, s’affranchit des erreurs
d’alignement et, du fait de son encombrement réduit, permet son intégration
dans des appareils mobiles ou espaces confinés.
Le chapitre suivant est consacré à l’évaluation de la netteté des pixels de
chaque image de la séquence. Après l’acquisition, la mesure de netteté est la
seconde étape très importante pour garantir une reconstruction 3D fidèle de
la scène analysée.
65


Chapitre 3
Evaluation de la netteté
La notion de netteté correspond à une focalisation complète de l’énergie
lumineuse réfléchie par un point de la scène sur le plan capteur. Il existe en
réalité une zone considérée comme nette appelée profondeur de champ intro-
duite section 2.1.2. Cette zone nette est donc à mettre en correspondance avec
l’objet ou la partie de la scène à acquérir. Pour faire un parallèle avec la vision
humaine, cette focalisation sur la zone visualisée, et donc l’évaluation de la
netteté permettant de juger cette zone comme la plus nette, est réalisée auto-
matiquement par le processus physiologique d’accommodation. Cependant, en
vision par ordinateur, ce processus est à recréer afin d’évaluer cette netteté de
façon automatique sans dépendre de l’expertise subjective de l’utilisateur. Un
des exemples les plus courants de la mise au point automatique d’un système
d’acquisition est l’autofocus, terme anglo-saxon, présent sur les appareils pho-
tos, qui ajuste automatiquement la bague de mise au point jusqu’à maximiser
la netteté sur le point de la scène visé. Une valeur de netteté est attribuée
à chaque changement du paramètre optique et son maximum correspond la
distance de mise au point assurant la netteté.
Ce processus de mise au point automatique, qui a évolué au cours du temps,
se divise en plusieurs procédés répartis en deux catégories :
– Procédés actifs : utilisation d’un système télémétrique associé permettant
de mesurer la distance séparant le point de la scène visé de l’appareil.
On retrouve l’utilisation de systèmes télémétriques à base d’ultrasons
67

Chapitre 3 Evaluation de la netteté
ou de faisceaux infrarouges (principe similaire à celui des méthodes de
reconstruction 3D, basées sur les mêmes signaux, décrites chapitre 1). Ce
sont les premiers systèmes d’autofocus créés mais très peu utilisés de nos
jours.
– Procédés passifs : ces systèmes d’autofocus se basent directement sur l’in-
formation contenue dans la scène visualisée pour évaluer la netteté. On
retrouve les autofocus à détection de phase qui utilisent plusieurs mi-
crocapteurs CCD qui vont recevoir l’énergie lumineuse de la scène par
un système de condenseur et lentilles de focalisation. En fonction de la
réponse de ces microcapteurs, le sens de rotation de la bague de mise
au point ainsi que l’amplitude du déplacement sont simultanément dé-
terminés pour permettre une mise au point correcte [Kusada, 1996]. Ce
système est celui couramment utilisé sur les appareils reflex pour leur
rapidité et leur qualité d’estimation. Un autre système d’autofocus passif
se base sur la mesure de contraste des pixels adjacents à différents em-
placements de la scène visualisée. Ainsi, plus la zone est contrastée, plus
elle est nette. La mise au point est faite en continu jusqu’à maximiser la
mesure de contraste. Cet autofocus se retrouve sur les appareils bas de
gamme.
Dans notre cas, l’objectif n’est pas de converger vers la mise au point consti-
tuant l’image la plus nette mais de déterminer l’image pour laquelle chaque
pixel est le plus net parmi les images de la séquence (figure 3.0.1). La position
de l’image où le pixel considéré est le plus net renvoie directement à l’infor-
mation de profondeur de celui-ci, puisque notre système est calibré (section
2.4.3). Une évaluation locale de la netteté est donc nécessaire. Au même titre
que la mesure de contraste, de nombreuses méthodes permettant l’estimation
de la netteté locale sont présentes dans la littérature. Dans ce chapitre, un état
de l’art de ces méthodes est proposé ainsi que les méthodes d’approximation
affinant l’estimation de la profondeur pour chaque pixel. Puis, la comparaison
des différents opérateurs de mesure de netteté est effectuée par une méthode
adaptée à notre problématique. Enfin, une méthode non supervisée et une
méthode supervisée permettant le choix de l’opérateur à utiliser en fonction
de la scène visualisée sont présentées.
68

3.1 État de l’art des opérateurs de mesure de netteté
����
Distance
mise au point Position
pixel
Séquence d’images
Mesure
netteté
Figure 3.0.1: Schéma du principe de mesure de netteté d’un pixel de la sé-quence d’images.
3.1 État de l’art des opérateurs de mesure de
netteté
On retrouve dans la littérature beaucoup d’opérateurs permettant l’évalua-
tion de la netteté. A l’origine, ils étaient plutôt utilisés afin de déterminer la
meilleure distance de mise au point en microscopie avec une évaluation de la
netteté sur l’image totale. Ils sont depuis également au cœur de l’algorithme
de reconstruction 3D « Shape from Focus » mais utilisés localement au voi-
sinage des pixels. Globalement, les mesures de netteté se basent sur la maxi-
misation de l’information haute fréquence puisqu’une image nette contient
plus de changements d’intensité et de primitives à fort gradient (coins, arêtes
...) qu’une image floue. Bien évidemment, le principal inconvénient de cette
méthode de reconstruction 3D est que son application est limitée aux scènes
présentant des composantes hautes fréquences, donc aux scènes présentant des
zones texturées. Dans le cas contraire, l’adjonction d’une lumière structurante
est nécessaire [Noguchi et Nayar, 1994].
On retrouve dans l’état de l’art une répartition de ces opérateurs en quatre
grandes familles : mesures différentielles, statistiques, fréquentielles et autres
69

Chapitre 3 Evaluation de la netteté
types de mesures. Dans ces catégories, seul les opérateurs de mesure de netteté
conservés pour la suite de l’étude sont détaillés. Ces opérateurs constituent
un exemple représentatif des différentes familles d’opérateurs ainsi que ceux
couramment utilisés et ayant fait leurs preuves. De plus, deux nouveaux opé-
rateurs basés sur les informations fréquentielles sont décrits dans la section
associée.
3.1.1 Mesures différentielles
Plus une image devient floue, plus le diamètre du cercle de la tache floue
censée représenter un point de la scène est important. Ainsi, cette tache floue
a pour effet de distribuer l’énergie d’un pixel sur un ensemble de pixels adja-
cents. Des fonctions mesurant la différenciation entre un pixel et ses voisins
présentent donc un extrémum dans l’image pour laquelle le pixel est le mieux
focalisé. Les fonctions mesurant cette différenciation sont nombreuses comme,
par exemple, le gradient de Brenner [Brenner et al., 1976], l’énergie du Lapla-
cien ou du gradient, mesures très utilisées et proposées par [Subbarao et al.,
1993] :
FMnrjgrad(i, j) =i+N∑
x=i−N
j+N∑
y=j−N
f2x +f2
y , (3.1.1)
où fx = I(x + 1,y) − I(x,y), fy = I(x,y + 1) − I(x,y) (avec I(x,y) la valeur
du pixel à la position (x,y)). N représente la taille du voisinage considéré
pour la mesure de netteté (il en est de même pour toutes les autres équations
comprenant N) et (i, j) sont les coordonnées du pixel en cours de mesure.
Des variantes ont été proposées par [Ahmad et Choi, 2007] utilisant le gra-
dient et [An et al., 2008] le Laplacien, mais en considérant non pas un voisinage
2D mais un voisinage 3D de chaque pixel. Les images précédentes et suivantes,
par rapport à l’image en cours d’analyse, sont donc mises à contribution.
[Tenenbaum, 1970] propose d’estimer l’amplitude du gradient (eq. 3.1.4) à
chaque pixel en additionnant les amplitudes de tous les pixels du voisinage
supérieures à une valeur seuil T . Les opérateurs de Sobel sont utilisés comme
70

3.1 État de l’art des opérateurs de mesure de netteté
masque de convolution :
Sh =
−1 0 1
−2 0 2
−1 0 1
Sv =
1 2 1
0 0 0
−1 −2 −1
, (3.1.2)
S(x,y) =√
[Gh(x,y)]2 +[Gv(x,y)]2, (3.1.3)
où Gh(x,y) et Gv(x,y) sont, respectivement, la convolution entre l’image I et
les masques Sh et Sv aux coordonnées (x,y). La mesure de netteté proposée
appelée « Tenengrad » est donnée par :
FMten(i, j) =i+N∑
x=i−N
j+N∑
y=j−N
[S(x,y)]2 avec S(x,y) > T. (3.1.4)
Une variante de cette mesure est suggérée par [Krotkov, 1987] pour laquelle
aucune valeur seuil n’est utilisée. D’autre part, [Pech-Pacheco et al., 2000]
calculent la variance de l’amplitude du gradient :
FMten_var(i, j) =i+N∑
x=i−N
j+N∑
y=j−N
[
S(x,y)− S]2
, (3.1.5)
où S = 1N2
∑i+Nx=i−N
∑j+Ny=i−N S(x,y).
Dans le cadre du « Shape from Focus », un opérateur très utilisé est le
Laplacien modifié présenté dans la publication originelle de la méthode de
reconstruction 3D [Nayar, 1989]. Le Laplacien classique devient nul lorsque
les deux dérivées secondes sont de même amplitude mais de signes opposés :
L(x,y) =∂2I(x,y)
∂x2+
∂2I(x,y)∂y2
. (3.1.6)
Le Laplacien modifié considère donc l’amplitude des deux dérivées secondes :
ML(x,y) =
∣
∣
∣
∣
∣
∂2I(x,y)∂x2
∣
∣
∣
∣
∣
+
∣
∣
∣
∣
∣
∂2I(x,y)∂y2
∣
∣
∣
∣
∣
. (3.1.7)
71

Chapitre 3 Evaluation de la netteté
L’approximation discrète du Laplacien modifié est définie comme la convo-
lution du filtre Laplacien carré et le voisinage considéré :
ML(x,y) =
∣
∣
∣
∣
∣
∣
∣
∣
∣
0 −1 0
−1 4 −1
0 −1 0
∗ I(x,y)
∣
∣
∣
∣
∣
∣
∣
∣
∣
. (3.1.8)
La mesure de netteté correspondante est donc définie par l’équation 3.1.9 :
FMsml(i, j) =i+N∑
x=i−N
j+N∑
y=j−N
ML(x,y) avec ML(x,y) > T. (3.1.9)
3.1.2 Mesures statistiques
Les mesures de contraste précédemment évoquées se trouvent dans cette
famille de mesures. Ainsi, une des mesures de netteté les plus utilisées est
basée sur la variance des niveaux de gris du voisinage [Groen et al., 1985] :
FMvar(i, j) =1
N2 −1
i+N∑
x=i−N
j+N∑
y=j−N
[I(x,y)− g]2 , (3.1.10)
où g est la moyenne des niveaux de gris au voisinage du pixel I(x,y).
Le contraste peut également être défini par la différence entre les niveaux de
gris maximum et minimum. [Firestone et al., 1991] suggèrent d’utiliser cette
différence comme mesure de netteté :
FMrange(i, j) = maxx,y [I(x,y)]−minx,y [I(x,y)] , (3.1.11)
où x = i−N,..., i+N et y = j −N,..., j +N .
Partant du principe qu’une image nette détient plus d’informations qu’une
image floue, [Krotkov, 1987] évalue la netteté par la mesure de l’entropie dans
72

3.1 État de l’art des opérateurs de mesure de netteté
le voisinage du pixel étudié :
FMentropy = −∑
k
pk log2 pk, (3.1.12)
où pk représente la fréquence relative du niveau de gris de valeur k.
Notons qu’une mesure de netteté statistique basée sur une analyse en com-
posantes principales du voisinage 3D du pixel considéré est proposée par [Mah-
mood et Choi, 2008].
3.1.3 Mesures fréquentielles
Une image nette présente plus de composantes hautes fréquences qu’une
image floue. L’étude de l’information fréquentielle du voisinage de chaque pixel
est le fondement de plusieurs mesures de netteté. De ce fait, nombre d’auteurs
proposent des mesures de netteté basées sur différentes transformées telles
que la transformée de Fourier [Malik et Choi, 2008], la transformée en cosinus
discrète [Shen et Chen, 2006, Kristan et al., 2006] ou encore la transformée
en ondelettes discrètes [Yang et Nelson, 2003].
Lorsqu’une image devient floue, l’énergie des composantes hautes fréquences
diminue alors que celle des basses fréquences augmente. C’est sur ce constat
que se basent [Xie et al., 2006] qui suggèrent l’utilisation, comme mesure
de netteté, du ratio entre la somme des coefficients hautes fréquences des
moments d’ordre deux (eq. 3.1.13) et des coefficients basses fréquences 3.1.14)
de la transformée en ondelettes discrètes (eq. 3.1.15) :
M2H =
K∑
I=1
∑
(x,y)∈SLHI
W 2LHI(x,y)+
∑
(x,y)∈SHLI
W 2HLI(x,y)+
∑
(x,y)∈SHHI
W 2HHI(x,y)
,
(3.1.13)
M2L =
∑
(x,y)∈SLL
W 2LLK(x,y), (3.1.14)
FMwavratio =M2
H
M2L
, (3.1.15)
73

Chapitre 3 Evaluation de la netteté
où WLHI , WHLI et WHHI sont les coefficients hautes fréquences des sous-
bandes SLHI , SHLI et SHHI (respectivement filtrage horizontal, vertical et
diagonal). WLLK est le coefficient basses fréquences de la sous-bande SLL
pour le Kieme niveau d’ondelette. Après comparatifs, les auteurs utilisent les
ondelettes de Daubechies d’ordre 6 et 3 étapes de décomposition. Comparée
aux autres mesures de netteté, la complexité de celle-ci étant plus élevée,
le temps de calcul l’est également, mais d’après [Shen et Chen, 2006] cette
mesure permet une meilleure efficacité sur les zones peu contrastées.
3.1.4 Autres types de mesures
On retrouve enfin des opérateurs non classables dans les autres catégories.
C’est le cas des opérateurs basés sur une mesure de corrélation comme celle
suggérée par [Vollath, 1987] :
FMcorr(i, j) =i+(N−1)
∑
x=i−N
j+N∑
y=j−N
I(x,y)·I(x+1,y)−i+(N−2)
∑
x=i−N
j+N∑
y=j−N
I(x,y)·I(x+2,y).
(3.1.16)
Cette mesure de netteté s’appuie sur le fait que la variabilité de l’information
est plus importante pour une image nette que pour une image floue même pour
un léger décalage du voisinage. [Helmli et Scherer, 2001] suggèrent de mesurer
le contraste local en calculant le ratio entre l’intensité du pixel mesuré et
la moyenne des pixels avoisinants. Le ratio sera donc plus important pour un
voisinage contrasté. Récemment, [Minhas et al., 2009] ont proposé une mesure
de netteté basée sur des filtres orientables dans le cadre de la reconstruction
3D par « Shape from Focus ». Ils utilisent la fonction gaussienne h(x,y) (eq.
2.1.4) dont les dérivées partielles constituent les filtres orientables de base Gx
et Gy (eq. 3.1.17 et 3.1.18, respectivement 0 et 90 degrés) :
Gx =1σ2
(−x×h(x,y)), (3.1.17)
Gy =1σ2
(−y ×h(x,y)). (3.1.18)
Le jeu de filtres orientables R est ensuite obtenu par les rotations θ de ces
74

3.2 Mesure de netteté basée sur les descripteurs généralisés de Fourier
filtres de base convolués au voisinage considéré :
Rx(x,y) = Gx ∗ I(x,y), (3.1.19)
Ry(x,y) = Gy ∗ I(x,y), (3.1.20)
Rθ(x,y) = cos(θ).Rx + sin(θ).Ry, (3.1.21)
où θ = {0°,45°,90°,135°,180°,225°,270°,315°}. La mesure de netteté est obte-
nue en évaluant l’amplitude maximum de chaque filtre et le pixel dont l’am-
plitude est la plus élevée est considéré net :
FMorient =i+N∑
x=i−N
j+N∑
y=j−N
maxθ(Rθ(x,y)). (3.1.22)
3.2 Mesure de netteté basée sur les
descripteurs généralisés de Fourier
Comme le type de scène considéré pour nos applications agronomiques est
souvent texturé, une mesure de netteté basée sur l’analyse de cette texture
semble pertinente. Parmi les opérateurs d’analyse de texture couramment uti-
lisés, on retrouve les 14 paramètres d’Haralick [Haralick et al., 1973] qui, pour
certains, correspondent aux mesures de netteté présentées précédemment (en-
tropie, variance, corrélation). L’analyse de netteté ne passe cependant pas par
l’application de ces paramètres sur une matrice de cooccurrence mais sur le
voisinage directement.
Récemment, [Journaux et al., 2011] ont utilisé les descripteurs généralisés
de Fourier (DGF) dans le cadre d’analyses de rugosité de plantes pour la
pulvérisation de précision en agronomie. Ces descripteurs ont été introduits
par [Gauthier et al., 1991] et appliqués à des problématiques de reconnaissance
de formes [Smach et al., 2008]. En considérant la fonction f , la transformée
de Fourier f de cette fonction est définie telle que :
75

Chapitre 3 Evaluation de la netteté
f(λ,θ) =ˆ
R2
f(x,y)e−j(λx+θy)dxdy, (3.2.1)
où f(λ,θ) représente la tranformée de Fourier de f au point de coordonnées
polaires (λ,θ). Le descripteur généralisé de Fourier est défini tel que :
Df (λ) =ˆ 2π
0
∣
∣
∣f(λ,θ)∣
∣
∣
2dθ. (3.2.2)
Transformée de Fourier 2D Vecteur
caractéristique
Figure 3.2.1: Schématisation de l’acquisition du descripteur généralisé de Fou-rier.
Un vecteur caractéristique du voisinage considéré pour la mesure de netteté
est donc obtenu (figure 3.2.1). Une fois ce vecteur déterminé pour chaque
pixel de la séquence d’images, nous proposons deux façons de transformer
l’information de ces vecteurs en mesures de netteté.
La première est de simplement sommer l’ensemble des valeurs de chaque
vecteur. En effet, plus élevée est la somme des énergies de chaque fréquence,
plus net est le voisinage considéré. Cette mesure de netteté est définie par
l’équation 3.2.3 :
FMDGF som =M∑
λ=1
Df (λ), (3.2.3)
76

3.2 Mesure de netteté basée sur les descripteurs généralisés de Fourier
oùM représente la taille du vecteur caractéristique égal à la moitié de la taille
du voisinage.
La seconde méthode de mesure de netteté se base sur toute une séquence
de voisinages d’un pixel de mêmes coordonnées dans chaque image. Ainsi,
cette mesure s’apparente à une mesure de netteté 3D comme certaines citées
précédemment. Le calcul de chaque vecteur caractéristique du même pixel de
chaque image est effectué puis ces vecteurs sont concaténés en une matrice
(figure 3.2.2). Une analyse en composantes principales [Jolliffe, 2005] est ap-
pliquée à cette matrice (M). Les scores factoriels issus de l’ACP permettent
d’obtenir une projection optimisée des différents voisinages (ou pixels considé-
rés) selon les vecteurs des descripteurs généralisés de Fourier correspondants.
Cette projection est optimisée selon le premier axe de l’ACP qui contient le
pourcentage d’inertie (% d’information) le plus important au regard des autres
axes. La projection des scores factoriels de l’axe 1 met en évidence un gradient
de netteté allant des valeurs les plus faibles pour les pixels les moins nets, aux
scores factoriels les plus importants pour les pixels les plus nets. Autrement
dit, obtenir le score factoriel le plus fort revient à déterminer la position de
l’image dans laquelle le pixel est le plus net :
FMDGF acp = position(max(vecteur ACP )). (3.2.4)
77

Chapitre 3 Evaluation de la netteté
ACP
Vecteur
Scores factoriels
Séquence de
voisinages
Figure 3.2.2: Obtention du vecteur des scores factoriels.
En résumé, les opérateurs de mesure de netteté conservés pour la suite de
l’étude sont :
1. FMtenvar : variance de l’amplitude du gradient ;
2. FMnrjgrad : énergie du gradient ;
3. FMsml : somme de laplaciens modifiés ;
4. FMvar : contraste par variance des niveaux de gris ;
5. FMentropy : mesure de l’entropie locale ;
6. FMrange : contraste par différence entre maximum et minimum des ni-
veaux de gris ;
7. FMcorr : mesure de corrélation ;
8. FMorient : mesure par filtres orientables ;
9. FMwavratio : mesure par ratio d’ondelettes ;
10. FMDGF acp : mesure par régression linéaire des descripteurs généralisés
de Fourier ;
11. FMDGF som : mesure par somme des composantes des descripteurs gé-
néralisés de Fourier.
78

3.3 Approximation
3.3 Approximation
Une fois que les positions des images pour lesquelles la netteté est esti-
mée maximum pour chaque pixel sont connues, la création de la carte de
profondeur pourrait être faite directement en affectant à chaque pixel la dis-
tance correspondante à la position de l’image associée. Cependant, la séquence
d’images étant discrète (et le pas entre chaque image étant dépendant des
paramètres choisis par l’utilisateur), cette carte de profondeur obtenue par
la méthode directe souffre d’une topographie en « marche d’escalier ». Afin
d’obtenir une carte de profondeur avec une meilleure continuité, une approxi-
mation de la courbe de mesure de netteté est utilisée. Ceci permet également
une meilleure précision de l’estimation de profondeur puisque approximer la
courbe permet de limiter l’impact des valeurs de netteté aberrantes. [Nayar,
1989] suggère d’interpoler les valeurs des mesures de netteté en admettant que
celles-ci suivent une distribution gaussienne (figure 3.3.1).
�� ��−� �� ��+�
��+�
��
��−�
����
�
�
Figure 3.3.1: Approximation gaussienne.
La distance d correspondant au maximum de la courbe approximée Fmax
79

Chapitre 3 Evaluation de la netteté
est obtenue à partir des 3 points Fm−1, Fm+1 et Fm dont la distance associée
est notée dm :
d = dm +log(Fm−1)− log(Fm+1)
2 log(Fm−1)−4log(Fm)+2log(Fm+1). (3.3.1)
Dans le cas d’une courbe de netteté pour laquelle une interpolation trois points
est délicate, un ajustement d’une courbe à distribution gaussienne est utilisé.
D’autres types d’approximations sont proposés comme, par exemple, un
ajustement de polynômes de degrés 2 [Niederöst et al., 2002]. Une approche
non basée sur l’ajustement de courbe est proposée par [Subbarao et Choi,
1995] et nommée « Focused Image Surface ». Cette méthode particulière de
« Shape from Focus » se base sur une modélisation de la surface visualisée.
L’approximation de la surface plane existante pour chaque voisinage 3D de
pixel est calculée de manière à maximiser la mesure de netteté. [Choi et Yun,
2000] reprennent ce principe mais approximent la surface par des polynômes
de Lagrange alors que [Asif et Choi, 2001] utilisent un réseau de neurones.
L’inconvénient de ces méthodes est le temps de calcul beaucoup trop impor-
tant afin d’obtenir la carte de profondeur. De plus, avec une mesure de netteté
adaptée à la scène considérée, une approximation gaussienne se révèle efficace
du fait du comportement de la mesure de netteté apparenté à une distribution
gaussienne.
3.4 Comparaison
3.4.1 Méthodes de comparaison usuelles
Le choix de l’opérateur de mesure de netteté étant une étape fondamentale
que ce soit dans le cadre de la méthode de « Shape from Focus » ou pour de la
mise au point automatique, une comparaison de ces opérateurs est nécessaire.
C’est dans le cadre de la recherche de la distance de mise au point optimale
en microscopie que l’on retrouve le plus de comparaisons dans la littérature.
Ainsi, [Firestone et al., 1991] comparent plusieurs algorithmes de mesure de
netteté en évaluant quatre caractéristiques :
80

3.4 Comparaison
1. La précision : considérée comme la différence entre la position maximale
de la courbe de netteté obtenue et la position exacte.
2. La plage : intervalle où la courbe de netteté est monotone. Cette carac-
téristique indique une réaction fidèle à une augmentation ou une dimi-
nution de la netteté relative dans la scène.
3. Le nombre de faux maximums.
4. La largeur de la courbe de netteté à mi-hauteur : plus cette donnée est
faible et plus la mesure est considérée comme précise.
[Pertuz et al., 2012] ont proposé une comparaison très complète de la plu-
part des opérateurs appliqués à la méthode de « Shape from Focus ». Cette
comparaison est basée sur la mesure de l’erreur quadratique moyenne entre
une carte de profondeur obtenue pour chaque opérateur et une carte de pro-
fondeur de référence. Ce type de comparaison nécessite d’être en possession
de la vérité terrain et c’est pourquoi elle est couramment basée sur des scènes
de synthèse. De plus, la robustesse des opérateurs est évaluée en considérant
cinq niveaux de jeux de paramètres affectant de plus en plus la qualité d’une
mesure de netteté. Ainsi, les paramètres variant et affectant les mesures sont :
une diminution de la taille du voisinage considérée, du bruit additif, une baisse
du contraste et l’augmentation de la saturation dans les images.
Bien que donnant une idée des opérateurs à utiliser, ces méthodes de com-
paraison ne renseignent pas sur la robustesse des opérateurs aux variations
de paramètres les affectant et ce, séparément. Avec nos systèmes d’acquisition
pour lesquels l’éclairage est contrôlé, les mesures de netteté ne sont pas af-
fectées par les facteurs d’influence que sont le changement de contraste et de
saturation. En effet, chaque image de la séquence est acquise dans les mêmes
conditions que les autres. Il reste donc deux paramètres influents sur les opé-
rateurs de mesure de netteté : la taille du voisinage et la présence de bruit
additif. La taille du voisinage considérée pour la mesure de netteté de chaque
pixel est un élément délicat à fixer. En effet, en théorie, ce voisinage doit
être le plus petit possible afin de tenir compte de toutes les discontinuités
et d’obtenir la carte de profondeur la plus précise possible. Cependant, un
petit voisinage entraine nécessairement peu d’échantillons pour la mesure de
netteté et donc une robustesse au bruit faible et une précision de l’estimation
81

Chapitre 3 Evaluation de la netteté
de profondeur moins importante que pour un voisinage plus grand. Un com-
promis doit donc être fait et n’est pas implicite. Le bruit additif, quant à lui,
est un élément affectant fortement les mesures de netteté puisque correspon-
dant à des composantes hautes fréquences. Ainsi, un voisinage sans bruit et
net peut être considéré moins net qu’un voisinage flou et bruité du fait de la
présence de composantes hautes fréquences. On retrouvera, par exemple, du
bruit thermique ou impulsionnel dans les images acquises. Le bruit thermique
correspond principalement au courant d’obscurité dû à des électrons libres
générés lorsque le capteur n’est pas assez refroidi. Ces électrons s’ajoutent à
ceux d’origine lumineuse et faussent la valeur réelle du pixel affecté. Le bruit
impulsionnel correspond à des erreurs de transmission ou à une défaillance de
photo-éléments. Du bruit numérique, dû à une augmentation du gain ou une
prise d’image en faibles conditions d’éclairage, peut également être présent
mais résulte principalement d’une mauvaise gestion de l’acquisition.
3.4.2 Méthode de comparaison adaptée
Souhaitant évaluer la robustesse des opérateurs non seulement à la variation
de la taille du voisinage et au bruit additif mais également à la variation
simultanée de ces deux facteurs d’influence, une méthode de comparaison a
été développée. Le processus de comparaison se décompose en quatre parties
détaillées ci-après.
Séquences d’images de référence
La première étape est bien entendu la création des images de test simulant
des séquences d’images. Compte tenu du fait que la méthode de reconstruc-
tion 3D a pour objectif d’être appliquée à des scènes naturelles texturées,
l’utilisation de la base d’images VisTex (« Vision Texture ») [VisTex, 2002]
semble pertinente. En effet, cette base est constituée d’images de scènes natu-
relles acquises en conditions non contrôlées et réparties en différentes classes :
écorces d’arbres, murs, textiles, aliments, métaux, sols, fleurs, plantes, eau,
bois et divers. Dans notre cas, nous utilisons un exemplaire de chaque tex-
ture différente soit 72 images de définition 512 par 512 pixels (figure 4.4.1 en
annexe). De sorte à évaluer la robustesse au bruit des opérateurs de mesure
82

3.4 Comparaison
de netteté, les images de base sont bruitées selon 5 niveaux de bruit diffé-
rents. [Malik et Choi, 2008] suggèrent d’évaluer la robustesse des images pour
3 types de bruits : thermique, impulsionnel et « speckle ». Comme précisé pré-
cédemment, le bruit impulsionnel survient lors d’une mauvaise transmission
de l’information ou d’une défaillance de photo-élément. Le « speckle » est un
bruit apparaissant lors de la réflexion d’une lumière cohérente, type laser, sur
une surface texturée dont les motifs sont du même ordre de dimension que
la longueur d’onde. Dans notre cas, le « speckle » n’est pas considéré du fait
de notre système dénué de laser. De même pour le bruit impulsionnel dont la
probabilité d’apparition est négligeable, ou alors apparaissant ponctuellement
et tout aussi négligeable de par la définition des images. Le bruit thermique
est donc le bruit étudié et modélisé par un bruit gaussien. [Malik et Choi,
2008] proposent de modéliser ce bruit par des niveaux de variance de 0.5,
0.05, 0.005, 0.0005 et 0.00005. Cependant, utiliser ces niveaux de bruit n’en-
traine pas une augmentation croissante de la valeur de corrélation entre les
images bruitées et l’image originale (figure 3.4.1).
10−5
10−4
10−3
10−2
10−1
100
0.4
0.5
0.6
0.7
0.8
0.9
1
Variance bruit
Val
eur
de c
orré
latio
n
0.00005 0.0005 0.005
0.05
0.5
Figure 3.4.1: Effet des niveaux de bruit proposés par [Malik et Choi, 2008] surla valeur de corrélation entre l’image originale et l’image bruitée.
83
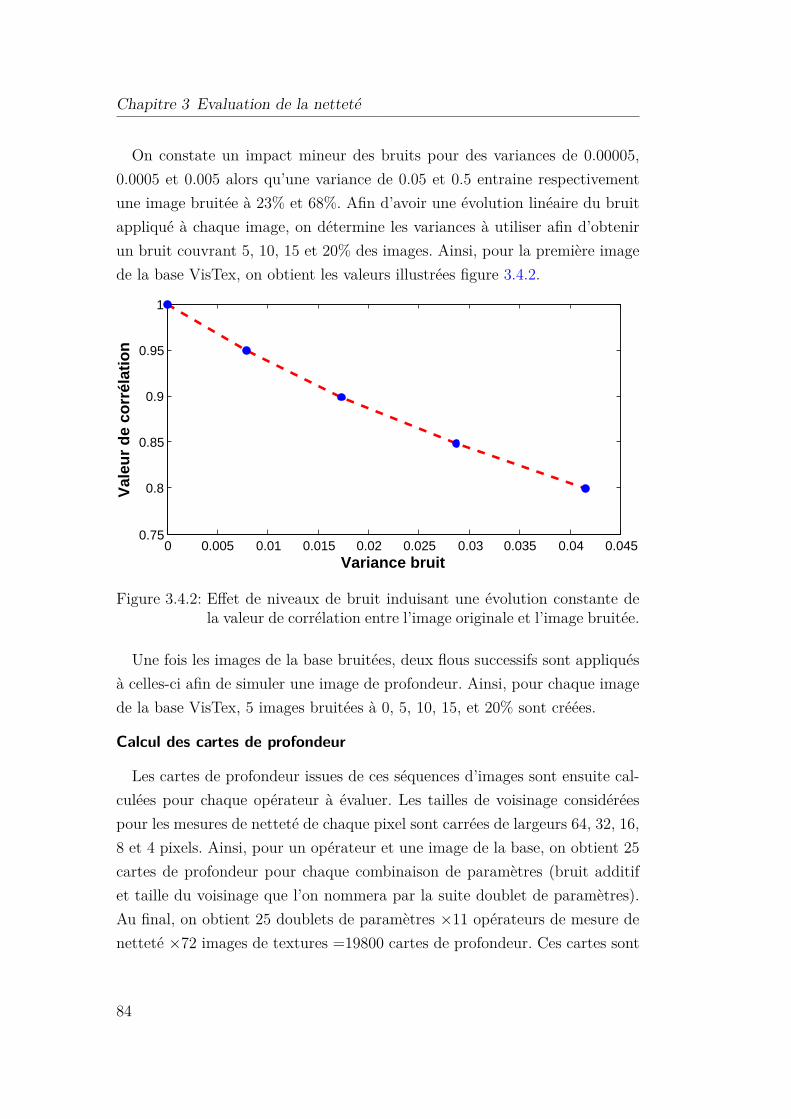
Chapitre 3 Evaluation de la netteté
On constate un impact mineur des bruits pour des variances de 0.00005,
0.0005 et 0.005 alors qu’une variance de 0.05 et 0.5 entraine respectivement
une image bruitée à 23% et 68%. Afin d’avoir une évolution linéaire du bruit
appliqué à chaque image, on détermine les variances à utiliser afin d’obtenir
un bruit couvrant 5, 10, 15 et 20% des images. Ainsi, pour la première image
de la base VisTex, on obtient les valeurs illustrées figure 3.4.2.
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04 0.0450.75
0.8
0.85
0.9
0.95
1
Variance bruit
Val
eur
de c
orré
latio
n
Figure 3.4.2: Effet de niveaux de bruit induisant une évolution constante dela valeur de corrélation entre l’image originale et l’image bruitée.
Une fois les images de la base bruitées, deux flous successifs sont appliqués
à celles-ci afin de simuler une image de profondeur. Ainsi, pour chaque image
de la base VisTex, 5 images bruitées à 0, 5, 10, 15, et 20% sont créées.
Calcul des cartes de profondeur
Les cartes de profondeur issues de ces séquences d’images sont ensuite cal-
culées pour chaque opérateur à évaluer. Les tailles de voisinage considérées
pour les mesures de netteté de chaque pixel sont carrées de largeurs 64, 32, 16,
8 et 4 pixels. Ainsi, pour un opérateur et une image de la base, on obtient 25
cartes de profondeur pour chaque combinaison de paramètres (bruit additif
et taille du voisinage que l’on nommera par la suite doublet de paramètres).
Au final, on obtient 25 doublets de paramètres ×11 opérateurs de mesure de
netteté ×72 images de textures =19800 cartes de profondeur. Ces cartes sont
84

3.4 Comparaison
constituées de 3 niveaux de gris pour chaque bande considérée nette (bande 1
- image originale, bande 2 - image avec léger flou et bande 3 - image avec flou
plus important). Une carte de profondeur idéale (figure 3.4.3a) est entièrement
constituée de niveaux de gris de valeur 85 alors qu’une erreur induit un niveau
de gris de 170 ou 255 (figure 3.4.3b voisinage 64×64 et bruit de 10%) dans
le cas où un opérateur considère comme nette une bande floutée. Ces cartes
sont créées suite à une évaluation de la netteté bloc par bloc de la taille du
voisinage choisie et pixel par pixel. Ceci afin d’acquérir l’ensemble des cartes
de profondeur plus rapidement compte tenu de la quantité de combinaisons.
a b
Figure 3.4.3: Exemple de cartes de profondeur obtenues : a. Voisinage 64×64sans bruit b. Voisinage 64×64 et bruit de 10%.
Evaluation des erreurs
Un fois toutes les cartes de profondeur créées, une métrique doit être choi-
sie afin de quantifier l’erreur induite par chacun des opérateurs de mesure
de netteté pour chaque combinaison. Dans notre cas, l’utilisation de l’erreur
moyenne quadratique n’est pas adaptée car un voisinage de 64 par 64 pixels
présentant une erreur fait état d’une erreur quadratique plus importante que
dans le cas d’un voisinage de 8 par 8 pixels, par exemple. L’erreur quadra-
tique est donc différente alors que dans les deux cas l’erreur réelle constatée
est identique. Dans le cas de notre application, les métriques classiques (erreur
quadratique, corrélation) ne sont pas adaptées. Une métrique spécifique est
85

Chapitre 3 Evaluation de la netteté
donc définie et repose sur le taux de voisinage présentant une erreur d’esti-
mation de profondeur :
Nombrevoisinagefaux =nbr pixel faux
taille voisinage2, (3.4.1)
Tauxvoisinagefaux =Nombrevoisinagefaux
Nombrevoisinagepresentdans image. (3.4.2)
Un pourcentage d’erreur est ainsi calculé pour chaque carte de profondeur.
Plan d’expériences factoriel
Dans le but d’évaluer la robustesse des opérateurs de mesure de netteté face
à la variation de la taille de voisinage et l’ajout de bruit, un plan d’expériences
factoriel est mis en place. L’utilisation d’un plan d’expériences permet d’étu-
dier le comportement d’un résultat en fonction de la variation des facteurs
choisis. Dans notre cas, le résultat est l’erreur induite par chaque opérateur
en fonction de la variation de 2 facteurs : la taille du voisinage et le bruit
additif. Ainsi, un plan d’expériences à 2 niveaux est mis en place pour chaque
opérateur. La première étape est la constitution de la matrice d’expériences
qui est du même type quel que soit l’opérateur (tableau 3.1).
Facteur 1 Facteur 2 Interaction Réponse
1 -1 -1 +1 y1
2 +1 -1 -1 y2
3 -1 +1 -1 y3
4 +1 +1 +1 y4
Niveau basValeur min Valeur min
facteur 1 facteur 2
Niveau hautValeur max Valeur maxfacteur 1 facteur 2
Effets E1 E2 E12
Tableau 3.1: Matrice d’expériences, effets et interaction pour 2 niveaux deparamètres.
86

3.4 Comparaison
Les valeurs minimales et maximales du facteur 1 sont les tailles de voisi-
nages choisies pour l’étude alors que ce sont les niveaux de bruit minimum et
maximum pour le facteur 2. Les réponses y1, y2, y3 et y4 correspondent aux
erreurs calculées pour chaque opérateur pour les doublets de facteurs 1 et 2.
On note que seulement 4 doublets de paramètres sont utilisés dans le cadre
du plan d’expériences. Toutes les autres mesures d’erreurs pour les 21 autres
doublets sont utilisées section 3.5.2 dans le but de déterminer les meilleurs
opérateurs pour un doublet de paramètres donné.
Une fois la matrice d’expériences créée, les effets (E1, E2 eq. 3.4.3 et 3.4.4)
ainsi que l’interaction entre les 2 facteurs (E12 eq. 3.4.5) sont calculés pour
chaque opérateur :
E1 =14
(−y1 +y2 −y3 +y4), (3.4.3)
E2 =14
(−y1 −y2 +y3 +y4), (3.4.4)
E12 =14
(+y1 −y2 −y3 +y4). (3.4.5)
3.4.3 Analyse du comportement des opérateurs
Les tableaux 3.2 et 3.3 illustrent les effets et l’interaction de chaque opé-
rateur alors que les figures 3.4.4 et 3.4.5 représentent le comportement des
erreurs en fonction de doublets de paramètres différents. Les premiers tableau
et figure illustrent le comportement de l’erreur en fonction d’un voisinage va-
riant de 64 × 64 à 4 × 4 pixels et un bruit de 0% à 20%. Le second jeu de
données est moins restrictif avec le facteur 1 variant de 64 × 64 à 8 × 8 et le
bruit de 0% à 10%.
87

Chapitre 3 Evaluation de la netteté
Opérateurs E1 (Voisinage) E2 (Bruit) E12 Moyenne des erreursFMtenvar 0.6099 0.4574 0.4109 16.0909FMnrjgrad 0.4553 0.7349 -0.0512 35.9979
FMsml 0.2131 0.8275 0.1410 27.0322FMvar 0.6124 0.4667 0.3965 16.3457
FMentropy 0.3098 0.7465 -0.3110 41.4041FMrange 0.5517 0.5566 0.3685 17.9252FMcorr 0.8439 0.1866 0.0551 30.4931
FMorient 0.7080 0.4572 0.1992 24.4235FMwavratio 0.2705 0.8023 0.1819 25.1023FMDGF acp 0.5835 0.5132 0.3823 19.3078FMDGF som 0.6119 0.4741 0.3883 19.1451
Tableau 3.2: Synthèse des résultats des plans d’expériences (voisinage 64×64et 4×4 ; bruit 0% et 20%).
0
10
20
30
40
50
60
70
roi64b1 roi4b1 roi64b5 roi4b5
FMtenvar
FMnrjgrad
FMsml
FMvar
FMentropy
FMrange
FMcorr
FMorient
FMwavratio
FMDGFacp
FMDGFsom
Figure 3.4.4: Evolution de l’erreur en fonction des doublets de paramètres(voisinage 64×64 et 4×4 ; bruit 0% et 20%).
88

3.4 Comparaison
Opérateurs E1 (Voisinage) E2 (Bruit) E12 Moyenne des erreursFMtenvar 0.5498 0.4973 0.4477 6.96FMnrjgrad 0.5409 0.6491 0.1899 26.3819
FMsml 0.2759 0.7774 0.2637 17.4966FMvar 0.5686 0.4875 0.4348 7.2946
FMentropy 0.5144 0.6947 0.0525 36.3676FMrange 0.4314 0.6688 0.3415 11.1156FMcorr 0.7775 0.3137 0.2170 19.1190
FMorient 0.6793 0.4330 0.3179 16.1515FMwavratio 0.3144 0.7503 0.2971 15.2910FMDGF acp 0.5255 0.5267 0.4431 10.3563FMDGF som 0.5480 0.5002 0.4467 9.5095
Tableau 3.3: Synthèse des résultats des plans d’expériences (voisinage 64×64et 8×8 ; bruit 0% et 10%).
0
10
20
30
40
50
60
roi64b1 roi8b1 roi64b3 roi8b3
FMtenvar
FMnrjgrad
FMsml
FMvar
FMentropy
FMrange
FMcorr
FMorient
FMwavratio
FMDGFacp
FMDGFsom
Figure 3.4.5: Evolution de l’erreur en fonction des doublets de paramètres(voisinage 64×64 et 8×8 ; bruit 0% et 10%).
89

Chapitre 3 Evaluation de la netteté
En analysant les deux synthèses, on remarque que globalement le com-
portement de chaque opérateur suit la même tendance que ce soit pour une
évolution de paramètres plus ou moins restrictifs. L’étude du comportement
de chaque opérateur doit être réalisée non seulement au regard des effets et
interactions mais également au regard de l’erreur induite par les doublets de
paramètres choisis.
Ainsi, deux comportements principaux apparaissent : une robustesse à la
variation de la taille du voisinage plus importante que pour une variation du
bruit additif et, inversement, une robustesse plus élevée au bruit qu’à une
réduction du voisinage considéré.
Le premier type de comportement concerne les opérateurs de mesure de
netteté FMnrjgrad, FMsml, FMentropy, FMrange et FMwavratio. Pour ces opé-
rateurs, l’ajout de bruit impacte d’avantage la qualité de la mesure qu’une va-
riation de la taille du voisinage. Parmi ce groupe, les opérateurs FMnrjgrad et
FMentropy se distinguent par une erreur d’estimation de netteté pour un voisi-
nage important et aucun bruit additif. De plus, ces derniers présentent peu de
robustesse non seulement à un bruit additif mais également à une variation de
la taille de voisinage au vu de l’erreur comparée à tous les autres opérateurs.
L’interaction calculée pour ces opérateurs est relativement faible mais cela
s’explique par une erreur déjà importante pour une variation d’un seul para-
mètre. Pour les trois opérateurs restants, une distinction significative est faite
entre FMrange légèrement moins robuste à une variation de voisinage mais
moins sensible à un bruit additif comparé à FMsml et FMwavratio. Ces deux
derniers opérateurs sont très sensibles au bruit mais font état des meilleurs
résultats lors d’une variation de taille de voisinage.
Le second type de comportement est valable pour tous les autres opérateurs,
à savoir FMtenvar, FMvar, FMcorr, FMorient, FMDGF acp et FMDGF som. En
effet, pour ces opérateurs, la variation de la taille de voisinage induit un ef-
fet plus important que celui calculé pour une variation de bruit additif. Pour
l’ensemble de ces opérateurs, on constate une robustesse importante au bruit
additif en comparaison aux opérateurs précédents. Un comportement global si-
milaire des opérateurs FMvar, FMtenvar, FMDGF acp et FMDGF som apparait
que ce soit au niveau des effets, interactions et erreurs. En revanche, FMcorr et
90

3.4 Comparaison
FMorient font état d’une sensibilité aux variations de la taille du voisinage lar-
gement supérieure aux autres opérateurs. Dans le cas moins restrictif et avec
une variation simultanée des deux paramètres étudiés, les opérateurs FMvar
et FMtenvar se distinguent par leur comportement vis-à-vis des erreurs des
erreurs. Pour le cas plus restrictif de variations des paramètres, la différence
est plus ténue entre les opérateurs de cette catégorie.
Pour résumer, on recommande les opérateurs selon 4 cas différents :
1. Taille de voisinage importante et pas de bruit additionnel : à l’exception
de FMentropy et FMnrjgrad, tous les autres opérateurs présentent un
bon comportement dans ce cas ;
2. Taille de voisinage importante et bruit additif : les opérateurs FMtenvar,
FMvar, FMDGF acp et FMDGF som se comportent de façon correcte et
similaire de par leur robustesse au bruit ;
3. Petite taille de voisinage et aucun bruit additionnel : à l’exception de
FMcorr, FMentropy, FMnrjgrad et FMorient, les autres opérateurs sont
à conseiller. Un avantage certain, dû à la robustesse à la variation de la
taille du voisinage, est constaté pour FMsml et FMwavratio ;
4. Petite taille de voisinage et bruit additif : cette configuration de para-
mètres influant sur la qualité de la mesure de netteté est la plus res-
trictive. La recherche de l’opérateur adapté dans ce cas passe par la
recherche de ceux ne démultipliant pas l’erreur pour une variation si-
multanée des deux paramètres. C’est le cas de l’opérateur FMrange qui,
même s’il n’est généralement pas en bonne position dans les tests com-
paratifs de la littérature, présente un comportement intéressant dans ce
cas particulier. Les opérateurs dont la sensibilité est moindre face aux
deux types de variations de paramètres apparaissent également comme
un bon choix. On retrouve dans ce cas les opérateurs FMtenvar, FMvar,
FMDGF acp et FMDGF som.
Pour conclure, cette méthode de comparaison permet d’étudier le com-
portement des différents opérateurs contrairement aux méthodes tradition-
nelles présentant un classement global. Ceci permet l’utilisation d’un opéra-
teur adapté à un cas particulier potentiellement plus performant qu’un opé-
91

Chapitre 3 Evaluation de la netteté
rateur considéré comme globalement efficace. De par le processus de calcul
de l’erreur réalisé, un classement général est toutefois possible et est présenté
section 3.5.2. On constate que nos opérateurs ont un comportement similaire
aux opérateurs FMtenvar et FMvar, considérés comme performants dans les
études comparatives de la littérature.
3.5 Evaluation automatique
L’objectif étant la réalisation d’un système de reconstruction 3D dédié prin-
cipalement à une application aux données agronomiques, le système se doit
d’être accessible et convivial pour permettre son utilisation par des non spé-
cialistes. Pour cela, une évaluation automatique de l’opérateur de mesure de
netteté à utiliser en fonction de la scène considérée est nécessaire. Dans cette
section, deux méthodes sont proposées dont l’une est non supervisée et la se-
conde supervisée. Une méthode non supervisée ne nécessite aucune interven-
tion de l’utilisateur alors qu’une méthode supervisée nécessite une ou plusieurs
informations en amont du processus d’automatisation.
3.5.1 Méthode non supervisée par fusion
d’opérateurs
Traditionnellement, la méthode de reconstruction 3D « Shape from Focus »
passe par l’utilisation d’un seul opérateur de mesure de netteté dans le cadre
du processus de reconstruction. Cependant, l’étude comparative précédente
met en évidence le fait que chaque opérateur fait état de forces et faiblesses
quant à sa robustesse au bruit ou au changement de taille de voisinage. Ainsi,
une fusion de l’information d’estimation de la netteté issue de plusieurs opé-
rateurs est envisagée. Ceci dans l’optique de garantir une carte de profondeur
relativement précise quel que soit le type de scène ou d’objet considérés en
tirant partie des atouts de plusieurs opérateurs.
Pour ce faire, une analyse en composantes principales (également appelée
transformée de Karhunen-Loeve en traitement d’image) est appliquée à nos
92

3.5 Evaluation automatique
données. L’objectif de cette analyse est de déterminer un nouvel axe de pro-
jection des données maximisant la variabilité entres celles-ci.
Séquence d’images
…
Ope1 Ope3 Ope2 Ope4 Ope5 Ope N
ACP
Opérateurs
conseillés
Projection scores factoriels
axe de plus grande variance
=
Courbe mesure de netteté
Figure 3.5.1: Processus de fusion d’opérateurs de mesure de netteté.
Nos données représentent la concaténation des différents vecteurs de me-
sure de netteté issus de nos opérateurs en une matrice dont les colonnes font
référence aux variables (dans notre cas les opérateurs de mesure de netteté) et
les lignes aux individus (les images de la séquence). Chaque vecteur de netteté
est bien entendu normalisé entre 0 et 1 compte tenu du fait que la dynamique
de mesure est différente pour chaque opérateur. Le processus de fusion est
illustré figure 3.5.1 et un exemple de courbe de netteté obtenue est fournie fi-
gure 3.5.2. L’utilisation de cette courbe de netteté est la même que pour celles
issues des opérateurs, c’est-à-dire une approximation permettant l’estimation
de la profondeur du point de la scène considéré. Cette nouvelle courbe est le
résultat de la projection des scores factoriels issus de l’analyse en composantes
principales. Cela correspond à une projection optimisée des différentes valeurs
de netteté des voisinages considérés selon les vecteurs de netteté de chaque
opérateur utilisé. La projection concerne seulement les scores factoriels du pre-
mier axe de l’ACP en fonction de la position des voisinages correspondante
dans la séquence d’images. En effet, le premier axe, dans notre cas, est celui
93

Chapitre 3 Evaluation de la netteté
0 5 10 15 20 25 30−1.5
−1
−0.5
0
0.5
1
1.5
2
Position du voisinage
Sco
res
fact
orie
ls
Figure 3.5.2: Courbe de mesure de netteté correspondant à la projection desscores factoriels.
faisant état du pourcentage d’inertie le plus important comparé aux autres
axes (environ 90%).
Outre la courbe de mesure de netteté, l’information sur le choix de l’opé-
rateur à utiliser pour la scène considérée est obtenue. En effet, puisque le
maximum de cette nouvelle courbe correspond à l’estimation de la profondeur
du pixel en cours, un poids peut être affecté aux opérateurs ayant estimé la
même position. Ainsi, un pourcentage de bonne participation est obtenu pour
l’ensemble de la séquence d’images permettant de conseiller les opérateurs
dont l’estimation est la meilleure.
Ce nouveau processus d’estimation de la profondeur utilisant plusieurs opé-
rateurs nécessite un temps de calcul évidemment plus important puisque la
mesure de netteté est calculée pour chaque opérateur. Cependant, ceci permet
à l’utilisateur n’ayant pas connaissance de l’opérateur à utiliser, d’obtenir une
carte de profondeur plus précise que celle obtenue par un opérateur de mesure
de netteté non adapté. Dans le cas où plusieurs reconstructions 3D d’un type
de scène similaire sont envisagées, une première itération du processus per-
met de déterminer l’opérateur conseillé pour toutes les autres scènes similaires.
Bien entendu, cette méthode ne fonctionne que si une majorité d’opérateurs
efficaces sont utilisés. Outre l’analyse du comportement présentée précédem-
ment, l’étude par la méthode supervisée suivante a pour but une mise en
94

3.5 Evaluation automatique
évidence des opérateurs de mesure de netteté les plus efficaces.
3.5.2 Méthode supervisée par analyse de variance
L’étude comparative a permis de mettre en avant une correspondance entre
chaque doublet de paramètres (taille du voisinage et bruit additif) et des opé-
rateurs de mesure de netteté plus adaptés que d’autres pour chaque cas. Dé-
terminer par avance quels opérateurs sont à utiliser en fonction du doublet de
paramètres lié au type de scène considérée permet la création d’une méthode
supervisée de choix de l’opérateur le plus adapté. Les données nécessaires à
l’évaluation des meilleurs opérateurs pour chaque doublet sont celles obtenues
lors du processus de comparaison détaillé section 3.4.2. Pour rappel, les dou-
blets de paramètres correspondent à une variation de la taille de voisinage de
64×64, 32×32, 16×16, 8×8 et 4×4 pixels et un bruit additif variant de 0%,
5%, 10%, 15% et 20% (respectivement dans les figures et tableaux suivant b1,
b2, b3, b4 et b5 dans les dénominations de doublet).
On regroupe les erreurs calculées pour chaque doublet de paramètres. Ainsi,
pour chaque doublet est retrouvé l’ensemble des erreurs calculées pour chaque
opérateur et chaque image de la base VisTex. La comparaison d’un ensemble
d’échantillons indépendants est effectuée par une analyse de variance (terme
anglais ANOVA pour « ANalysis Of VAriance ») dès lors que l’on cherche à
comparer plus de deux moyennes. Dans notre cas, ce sont onze facteurs, cor-
respondant à nos onze opérateurs testés, qui nécessitent la comparaison de
onze moyennes puisque les images de la base VisTex représentent des répéta-
bilités de calcul des erreurs. De plus, nos échantillons (les erreurs calculées)
sont indépendants du fait que chaque opérateur induit une erreur propre à
celui-ci et n’infère en aucun cas sur les erreurs des autres opérateurs puisque
calculées séparément. Nos données sont indépendantes mais ne suivent pas
une distribution parfaitement gaussienne. Dans ce cas, les tests conseillés sont
plutôt des tests non paramétriques comme le test de Friedman. Toutefois,
les tests non paramétriques sont en général moins robustes qu’une analyse
de variance qui reste robuste même en cas de données ne suivants pas une
distribution normale [Kirk, 1995].
95
Chapitre 3 Evaluation de la netteté
Si le test F (test de Fischer) issu de l’analyse de variance effectuée pour
chaque doublet est significatif, c’est-à-dire que la valeur est inférieure au
seuil arbitrairement fixé à 5%, alors au moins deux moyennes sont différentes.
Pour identifier les moyennes différentes, un test de comparaison multiple de
moyennes est nécessaire. Ce type de test permet de constituer des groupes de
moyennes qui ne sont pas significativement différentes entre elles. Ces groupes
permettent ensuite d’analyser l’influence du facteur étudié (dans notre cas les
opérateurs) et ainsi préconiser l’utilisation, pour chaque doublet, des opéra-
teurs appartenant au groupe ayant la plus petite moyenne.
De nombreux tests de comparaison multiple de moyennes existent. Toute-
fois, nos échantillons ont le même effectif puisque, pour chaque doublet de
paramètres, chaque opérateur est associé à 72 valeurs d’erreurs calculées du
fait des 72 images de la base VisTex. Le test préconisé en cas d’effectifs simi-
laires (ou dispositifs équi-répétés) est le test de Newman-Keuls couramment
abrégé SNK pour Student-Newman-Keuls.
Dans notre cas, l’analyse de variance fait état d’un test F très inférieur à
5% pour l’ensemble des 25 doublets de paramètres. On applique donc le test
de Newman-Keuls pour chacune des 25 analyses de variance. La synthèse des
groupes d’opérateurs mis en évidence par le test est illustrée tableau 3.4. A
noter que le test, dans certains cas, propose de placer certains opérateurs dans
plusieurs groupes lorsqu’une appartenance unique n’est pas franche.
En vue d’une évaluation automatique de l’opérateur (ou des opérateurs si
fusion de leur estimation) en fonction du doublet de paramètres utilisé, c’est
donc dans le 1er groupe (en bleu dans le tableau) que sont choisis les opéra-
teurs. Afin de simplifier la compréhension de cette synthèse, une illustration
du 1er groupe uniquement pour chaque doublet est représentée tableau 3.5.
Une première constatation est le fait que certains opérateurs ne sont ja-
mais associés au groupe conseillé pour chaque doublet de paramètres. C’est
le cas de l’opérateur basé sur l’énergie du gradient (FMnrjgrad) et celui basé
sur le calcul de l’entropie (FMentropy). A l’inverse, les opérateurs basés sur
la variance du Tenengrad (FMtenvar) et la variance des niveaux de gris du
voisinage (FMvar) sont ceux à conseiller dans la plupart des cas. On leur
96

3.5E
valuationautom
atique
FMtenvar
roi64b1
roi64b2
roi64b3
roi64b4
roi64b5
roi32b1
roi32b2
roi32b3
roi32b4
roi32b5
roi16b1
roi16b2
roi16b3
roi16b4
roi16b5
roi8b1
roi8b2
roi8b3
roi8b4
roi8b5
roi4b1
roi4b2
roi4b3
roi4b4
roi4b5
FMorientFMcorr FMnrjgrad FMentropyFMvar FMDGFsom FMDGFacp FMwavratio FMsml FMrange
Tableau 3.4: Synthèse des groupes issus de l’analyse de variance.Du meilleur groupe au moins bon : Bleu, Vert, Rouge, Orange, Bleu clair, Noir, Blanc.97

Cha
pitr
e3
Eva
luat
ion
dela
nett
eté
FMtenvar
roi64b1
roi64b2
roi64b3
roi64b4
roi64b5
roi32b1
roi32b2
roi32b3
roi32b4
roi32b5
roi16b1
roi16b2
roi16b3
roi16b4
roi16b5
roi8b1
roi8b2
roi8b3
roi8b4
roi8b5
roi4b1
roi4b2
roi4b3
roi4b4
roi4b5
FMorientFMcorr FMnrjgrad FMentropyFMvar FMDGFsom FMDGFacp FMwavratio FMsml FMrange
Tableau 3.5: Synthèse du groupe d’opérateurs les plus efficaces issus de l’analyse de variance.
98

3.5 Evaluation automatique
préférera les opérateurs basés sur le ratio d’ondelettes (FMwavratio) ou sur le
Laplacien modifié (FMsml) pour de faibles tailles de voisinage exempt de bruit
additif. Nos deux opérateurs basés sur les descripteurs généralisés de Fourier
(FMDGF acp et FMDGF som) sont utilisés pour une taille de voisinage relati-
vement importante avec présence de bruit additif. Globalement, on retrouve
les comportements mis en évidence par le plan d’expérience mais l’analyse de
variance permet d’affiner cette connaissance de chaque opérateur.
Au sein du 1er groupe d’opérateurs pour chaque doublet, l’erreur moyenne
minimum engendrée par chaque variation de paramètres permet de créer la
courbe figure 3.5.3.
0
10
20
30
40
50
60
Figure 3.5.3: Courbe d’erreur moyenne minimale en fonction des doublets deparamètres.
Cette courbe permet de visualiser l’évolution de l’erreur moyenne minimale
en fonction des variations de paramètres. Une forte augmentation de l’erreur à
lieu lorsque la taille de voisinage se réduit conjointement à une augmentation
du bruit additif. Ainsi, il est intéressant de mettre en évidence les doublets
ayant un comportement similaire au regard de l’erreur moyenne engendrée.
Pour cela, on effectue une analyse de variance avec pour facteur les déno-
minations des doublets et en considérant comme répétabilités l’ensemble des
99

Chapitre 3 Evaluation de la netteté
autres facteurs que sont les opérateurs et images de la base VisTex. Le test
de Newman-Keuls permet de dégager les groupes illustrés tableau 3.6.
0% 5% 10% 15% 20%
Bruit additif
64
Ta
ille
de
vo
isin
ag
e
4
16
8
32
Tableau 3.6: Groupes de doublets de comportement similaire. Les couleursidentiques symbolisent les mêmes comportements. Le blanc estutilisé pour les doublets n’appartenant à aucun groupe.
Cette représentation permet un accompagnement de l’utilisateur quant au
choix de la taille de voisinage à utiliser. En effet, la taille de voisinage est un
paramètre devant être choisi par l’utilisateur en fonction de ses besoins. Une
petite taille de voisinage engendre une carte de profondeur de plus grande
précision tenant compte au maximum des discontinuités de profondeur. Ce-
pendant, le nombre d’échantillons limité induit par un petit voisinage entraine
une sensibilité accrue au bruit additif ainsi que des erreurs plus importantes
lors de l’estimation de la profondeur. Un compromis doit donc être fait et le
tableau 3.6 permet un accompagnement dans ce choix. Ainsi, on constate, par
exemple, que lorsqu’une scène est exempte de bruit, la taille de voisinage peut
être de 16 × 16 sans pour autant induire plus d’erreur que pour un voisinage
de 64 × 64 ou 32 × 32. On retrouve également des groupements relativement
logiques pour une scène bruitée comme, par exemple, un voisinage de 16×16
de bruit 15% est similaire à un voisinage de 8×8 dont le bruit est de 5%.
100

3.6 Conclusion
Enfin, l’analyse de variance et le test de comparaison peuvent être utili-
sés afin d’obtenir un classement général des opérateurs même si ceci n’est
pas représentatif de leurs forces et faiblesses par rapport aux variations de
paramètres. Dans notre cas, le classement tableau 3.7 est obtenu.
Groupe Opérateur Moyenne erreurs (%)A FMtenvar 14.87A FMvar 15.3B FMDGF som 19.65B FMrange 20.41B FMDGF acp 21.22C FMorient 27.73C FMcorr 28.25C FMwavratio 29.55D FMsml 32.95E FMnrjgrad 40.61F FMentropy 44.45
Tableau 3.7: Classement général des opérateurs de mesure de netteté (dumeilleur groupe A au moins bon F).
Un groupe global considéré comme le meilleur est constitué de FMtenvar et
FMvar, ce qui suit la tendance des résultats expliqués précédemment. Nos opé-
rateurs basés sur les descripteurs généralisés de Fourier se situent dans le 2eme
groupe avec une erreur moyenne totale 5% supérieure à celle du 1er groupe.
Sans pour autant égaler les opérateurs du 1er groupe, ils se démarquent tout
de même des autres opérateurs classés dans les groupes inférieurs.
3.6 Conclusion
Ce chapitre a été consacré à une étape fondamentale de l’estimation de
profondeur en tout point d’une scène par « Shape from Focus » : l’évaluation
de la netteté. Après un état de l’art des mesures usuelles existantes dans la
littérature, deux nouveaux opérateurs basés sur les descripteurs généralisés
de Fourier sont présentés. Ensuite, une présentation des méthodes d’approxi-
mation permettant un affinement de l’estimation de la netteté en vue d’une
information de profondeur plus précise est effectuée.
101

Chapitre 3 Evaluation de la netteté
Le choix de l’opérateur de mesure de netteté devant être parfaitement
adapté à la scène considérée, il est crucial de proposer à l’utilisateur des
outils permettant de faire ce choix. En règle générale, on retrouve dans la
littérature des articles de comparaison des différents opérateurs de mesure
de netteté. Cependant, ces comparaisons ne tiennent pas compte des forces et
faiblesses de chaque opérateur par rapport aux différents paramètres affectant
leur efficacité. Ainsi, une procédure d’étude du comportement des opérateurs
en fonction de la taille de voisinage considérée pour la mesure et du bruit
additif potentiellement présent dans les images est présentée. Elle se base sur
la mise en place d’un plan d’expériences dont l’analyse des résultats permet
une préconisation quant au choix de l’opérateur à utiliser en fonction du type
de voisinage et la présence ou non de bruit. Préconisation qui est confirmée
par l’analyse de variance des erreurs engendrées par plusieurs combinaisons
opérateur / taille de voisinage / bruit / image de référence. A cette analyse de
variance fait suite un test de comparaison multiple de moyennes (Newman-
Keuls) permettant la mise en évidence de groupes d’opérateurs pour chaque
doublet de paramètres (taille voisinage / bruit). Ces groupes permettent en-
suite une automatisation du choix de l’opérateur à utiliser en fonction de la
taille de voisinage et de la quantité de bruit estimée dans la séquence d’images.
Une méthode de choix automatique, non supervisée cette fois, est égale-
ment présentée et repose sur la fusion des estimations de netteté de plusieurs
opérateurs par le biais d’une analyse en composantes principales. Cette mé-
thode permet de tendre vers une bonne estimation de la profondeur même
en cas d’opérateurs peu performants des lors que plusieurs autres opérateurs
performants sont également utilisés.
Bien entendu, l’ensemble de ces processus est à adapter en fonction des
tailles maximales et minimales de voisinage étudiées ainsi que du pourcentage
de bruit minimal et maximal. L’atout principal de cette méthode de compa-
raison est avant tout la caractérisation du comportement des opérateurs et
non un simple classement comme ce peut être le cas traditionnellement.
102

Chapitre 4
Applications
Les deux chapitres précédents ont détaillé les deux étapes fondamentales
de la méthode d’estimation de la profondeur « Shape from Focus », à savoir
l’acquisition d’une séquence d’images et les outils permettant une évaluation
locale de la netteté de la scène. Ce chapitre présente des résultats obtenus
par l’ensemble de la méthode. Le processus global de reconstruction 3D est
illustré figure 4.0.1.
Ainsi, ce processus est automatisé et amorcé suite à plusieurs choix concer-
nant le nombre d’images à acquérir, le pas entre chaque acquisition (dépendant
de la profondeur de champ induite par le système optique utilisé), l’automa-
tisation (supervisée ou non), ou le choix manuel de l’opérateur de mesure de
netteté. Ce schéma fonctionnel se décompose en trois parties :
1. Génération de la séquence d’images. L’acquisition peut être réali-
sée soit par le 1er système soit par le 2nd en fonction du type de scène
considéré et de la précision attendue. En effet, le second système a l’avan-
tage de s’affranchir de la translation du centre optique durant le pro-
cessus d’acquisition. En revanche, le 1er système permet d’utiliser tous
types d’objectifs standards pour, par exemple, reconstruire de très pe-
tites scènes. Il est cependant exposé à une translation du centre optique
due aux vibrations lors du processus d’acquisition. La séquence d’images
acquise fait ensuite l’objet d’une correction des éventuelles distorsions
ainsi que d’un recalage des images corrigeant le grossissement induit par
103

Chapitre 4 Applications
Acquisition
Mesure
netteté
automatique
Correction
distorsions
Recalage séquence
Mesure netteté avec
opérateur choisi
manuellement
Méthode
supervisée
Sélection opérateur
fonction paramètres
séquence
Fusion opérateurs
Mesure netteté
Approximation
mesure de netteté
Génération carte de
profondeur
&
Image fusionnée
Affichage 3D scène
oui
non oui
non
1
2
3
Figure 4.0.1: Schéma fonctionnel du processus complet d’estimation de la pro-fondeur.
104

le déplacement du plan focal. La sortie de ce processus fournit une sé-
quence d’images pour lesquelles chaque pixel est associé au même point
de la scène considérée et dont la netteté est variable tout au long de la
séquence.
2. Evaluation de la netteté pour chaque pixel de la séquence
d’images. Etape cruciale d’obtention d’une information de profondeur
juste pour chaque point de la scène, elle fait l’objet de la principale in-
tervention de l’utilisateur. En effet, cette étape nécessite le choix de la
taille de voisinage à utiliser lors de la mesure de netteté pour chaque
pixel ainsi que le choix du procédé de mesure. Ce procédé peut être
manuel avec un choix de l’opérateur de mesure de netteté à utiliser par
l’utilisateur ou automatique suivant une approche supervisée (détaillée
section 3.5.2) ou non supervisée (détaillée section 3.5.1).
3. Génération de la carte de profondeur et de l’image fusionnée.
Une fois l’information de netteté obtenue pour chaque pixel, deux mises
en forme de cette information sont réalisables. La première est la géné-
ration de la carte de profondeur illustrant la profondeur en tout point
de la scène par un codage en niveaux de gris ou en fausses couleurs. La
seconde est la création d’une image entièrement nette de la scène. Avec
ces deux nouvelles images, une projection tridimensionnelle de l’infor-
mation de profondeur suivie du plaquage de l’image nette peuvent être
réalisés. A noter que cette représentation est purement explicite pour
une meilleure compréhension de la scène par l’utilisateur mais l’infor-
mation utile reste bien entendue la profondeur numérique pour chaque
point.
Cette thèse de doctorat n’étant pas spécifiquement liée à une application
précise, le type de scène n’est donc pas imposé. Ainsi, le choix a été pris de
tester l’ensemble de la méthode sur plusieurs types de scènes agronomiques
dont les deux végétaux suivants : des épis de blé et la plante Millepertuis.
De plus, afin d’élargir les champs d’application, une séquence d’images d’un
circuit intégré a permis le test des étapes deux et trois de la méthode dans
le cadre d’analyse de défaillance de composants électroniques. A noter que
ces résultats d’estimation de la profondeur n’ont pas vocation à permettre
105

Chapitre 4 Applications
une mesure qualitative de cette estimation mais de vérifier la cohérence de
l’analyse du comportement des opérateurs réalisée. En effet, une analyse de
la précision de l’estimation est dépendante d’une application particulière en-
gendrant le choix d’un système d’acquisition avec ses limites en termes de
profondeur de champ et d’un opérateur de mesure de netteté adapté. Notre
problématique de départ n’entraine pas un objectif de précision à atteindre
sur une application particulière mais bien le développement d’un système d’es-
timation de la profondeur d’une scène naturelle. C’est pourquoi le protocole
d’analyse du comportement des opérateurs de mesure de netteté sur un jeu de
données de scènes naturelles a été mis en place. L’étude de ces comportements
en amont de l’utilisation du système nous permet de déterminer les opérateurs
adaptés à une majorité de scènes naturelles différentes. Cependant, pour une
application bien particulière, la vérification de la cohérence de l’estimation de
profondeur pourrait être envisagée par une comparaison entre la topographie
mesurée par un scanner 3D et celle mesurée par notre méthode. Cette compa-
raison se basera sur une métrique du type erreur quadratique ou une mesure
de corrélation entre les profondeurs estimées. Les résultats d’estimation de
profondeur présentés dans ce chapitre ont donc pour objectif de confirmer
la validité de notre approche d’étude du comportement des opérateurs. Ceci
permet une utilisation du processus de reconstruction sur un grand nombre
de scènes naturelles différentes dès lors qu’une étude en amont permettant de
mettre en évidence les opérateurs adaptés est réalisée.
4.1 Application au dénombrement des épis de
blé
Cette première mise en application de la méthode de reconstruction a été
réalisée sur des images contenant des épis de blé. La volonté d’obtenir l’infor-
mation de profondeur de ce type de scène fait suite aux travaux antérieurs de
mon laboratoire axés sur la détection et le comptage des épis de blé en vue
d’une estimation précoce du rendement [Cointault et al., 2008]. L’estimation
du rendement étant réalisée au moment de la moisson par des capteurs embar-
106

4.1 Application au dénombrement des épis de blé
qués au sein des machines agricoles, elle permet seulement l’établissement de
cartes de rendements utilisées pour adapter la pratique des agriculteurs l’année
suivante. Une estimation précoce de ce rendement permettrait d’adapter cer-
taines pratiques en cours de saison et, éventuellement, améliorer le rendement
en fin de saison et de mieux gérer les parcelles. La composante principale de
l’évaluation du rendement est le nombre d’épis par mètre carré. Un comptage
automatique par vision artificielle de ces épis est donc la première étape vers
la conception d’un système d’évaluation précoce de rendement et a pour but
d’éviter un comptage manuel. L’étape de détection des épis de blé développée
précédemment passe par la recherche automatique d’un espace colorimétrique
de représentation des images acquises permettant une mise en évidence claire
des épis. L’information couleur n’étant pas suffisante, une information de tex-
ture lui est adjointe et définissant un nouvel espace de représentation appelé
espace hybride. L’espace hybride adapté mutualise l’information de l’espace
colorimétrique et des paramètres d’analyse de texture facilitant cette mise
en évidence. Une fois les épis détectés par cette étape, une seconde étape
de nettoyage par morphologie mathématique des images segmentées permet
d’éliminer les éventuels artefacts. La dernière étape est celle du comptage
des épis pour laquelle un problème se pose lors du recouvrement de plusieurs
épis dans l’image acquise. Bien que le recours à des algorithmes, tels que la
squelettisation, permettent de différencier ces épis dans certains cas, l’aide
de l’information de profondeur est plus adaptée. En effet, un recouvrement
signifie que les épis ne se situent pas dans le même plan spatial et être en
possession de l’information de profondeur permet de discriminer ceux-ci lors
du comptage. C’est donc cette problématique liée aux travaux antérieurs qui
est à l’origine de ce projet de recherche.
4.1.1 Acquisitions par le système expérimental
Dans un premier temps, l’acquisition a été effectuée par le système expé-
rimental (présenté partie 2.2) avec un pas entre chaque image de 1 cm. Un
extrait d’images de la séquence originellement constituée de 30 images est
illustré figure 4.1.1.
107

Chapitre 4 Applications
Figure 4.1.1: Extrait d’images de la séquence issue du système expérimental.
La mesure de netteté utilisée pour cette séquence d’images est celle basée
sur la variance de l’amplitude du gradient (FMtenvar) avec un voisinage de
mesure de 11×11 pixels. Les résultats imagés de l’évaluation de la profondeur
sont illustrés figure 4.1.2.
On notera l’application d’un lissage de la carte de profondeur avant projec-
tion lors de la présence de pics correspondant à une erreur ponctuelle d’esti-
mation de la profondeur. Ce lissage est effectué par filtrage médian, suggéré
par [Niederöst et al., 2002], des artefacts comme ceux entourés sur la carte de
profondeur figure 4.1.2a.
4.1.2 Acquisitions par le système final
Comme présenté dans la section 2.3, le second système, constitué d’une ca-
méra et d’un objectif motorisé, permet de s’affranchir du léger déplacement
108

4.1 Application au dénombrement des épis de blé
a b
c d
Figure 4.1.2: Reconstruction 3D par le système expérimental. a. Carte de pro-fondeur. b. Image nette. c. Projection en fausses couleurs. d.Projection avec placage de texture.
du centre optique généré par les vibrations lors du déplacement. De plus, et
s’inscrivant dans l’aspect automatique recherché de l’ensemble du processus
de reconstruction, les images constituant la séquence sont acquises automati-
quement et bien plus rapidement qu’avec le premier système. Ceci est dû au
fait qu’une légère rotation de la bague de mise au point motorisée est plus
rapide qu’un déplacement linéaire de l’ensemble du bloc optique. Du fait de
la focale de 35 mm de cet objectif, le champ de vue est plus important que
pour le premier système composé d’un objectif 50 mm.
En accord avec les résultats de l’étude du comportement des différents
opérateurs de mesure de netteté présentés chapitre 3, on détaille les résul-
109

Chapitre 4 Applications
tats obtenus par l’opérateur basé sur la variance de l’amplitude du gradient
(FMtenvar). Les résultats obtenus par l’opérateur FMDGF som, notre opéra-
teur basé sur les descripteurs généralisés de Fourier, et l’opérateur FMentropy
mesurant la quantité d’information locale sont également illustrés afin d’avoir
matière à comparaison. Les voisinages considérés pour les mesures de netteté
sont 9 × 9 et 33 × 33 pixels afin de visualiser des résultats issus d’une petite
zone d’intérêt et ceux d’une zone relativement importante. La différence d’un
pixel par rapport aux voisinages utilisés lors du processus de comparaison
(8 × 8 et 32 × 32 pixels) vient du fait que, au vu du nombre de calculs réa-
lisés (19800 combinaisons de paramètres), l’incrémentation n’était pas de un
pixel mais d’un nombre correspondant au voisinage utilisé afin d’accélérer les
calculs. Pour la comparaison, ceci ne pose pas de problème puisque l’intérêt
n’est pas le rendu de la carte de profondeur mais la quantification des erreurs
(taux de pixels faux dans les cartes de profondeur). Cependant, dans le cas de
reconstruction 3D de scène réelle, l’incrémentation est bien d’un pixel pour
obtenir une estimation de profondeur propre à chaque pixel.
La séquence d’images acquises est constituée de 27 images, chacune espacée
d’un pas de 1 cm dont un extrait est founi figure 4.1.3. Les cartes de profondeur
et les projections 3D associées pour un voisinage de 9×9 pixels sont illustrées
figure 4.1.4 et figure 4.1.5 pour un voisinage 33×33 pixels.
Les résultats sont obtenus avec une interpolation gaussienne des courbes de
netteté pour chaque pixel. L’information utile se retrouve à travers une matrice
de valeurs pour chaque point de la scène. Ainsi, en fonction de l’application,
les valeurs de cette matrice sont, par exemple, la distance entre le système
d’acquisition et le point considéré ou encore la distance entre le sol et le point
pour une acquisition verticale.
Le 1er constat au regard des images résultats est la différence visuelle entre
les résultats associés à une petite taille de voisinage (9×9 pixels) et un voisi-
nage de plus grande dimension (33×33 pixels). En effet, comme stipulé dans
le chapitre précédent, on remarque qu’une taille de voisinage de plus grande
dimension entraine moins d’artefacts d’erreur mais a pour effet de lisser la
carte de profondeur. Ainsi, un plus petit voisinage, même s’il est sujet à plus
d’artefacts permet une estimation plus fine des détails de la scène comme
110

4.1 Application au dénombrement des épis de blé
Figure 4.1.3: Extrait d’images de la séquence d’épis de blé issue du systèmefinal.
les grains ici. Dans notre cas, cette estimation plus fine met en évidence les
grains de blé pour un petit voisinage contrairement à un voisinage élevé où
la topographie est plus grossière mais moins soumise aux erreurs. Distinguer
les grains se révèle intéressant par rapport à la problématique d’évaluation
du rendement qui passe par le dénombrement des grains et l’étude de leur
volume.
Globalement, on remarque visuellement que les différents opérateurs se com-
portent en accord avec les résultats des études statistiques. Ainsi, l’opérateur
FMtenvar fait état des meilleurs résultats pour les 2 tailles de voisinage dif-
férentes. L’opérateurs FMDGF som, malgré quelques erreurs plus importantes
notamment au niveau des bordures, révèle un comportement relativement si-
111

Chapitre 4 Applications
a
b
c
Figure 4.1.4: Cartes de profondeur et projection 3D d’une scène d’épis de blépour un voisinage de 9 × 9 pixels. a. FMtenvar. b. FMDGF som.c. FMentropy.
112
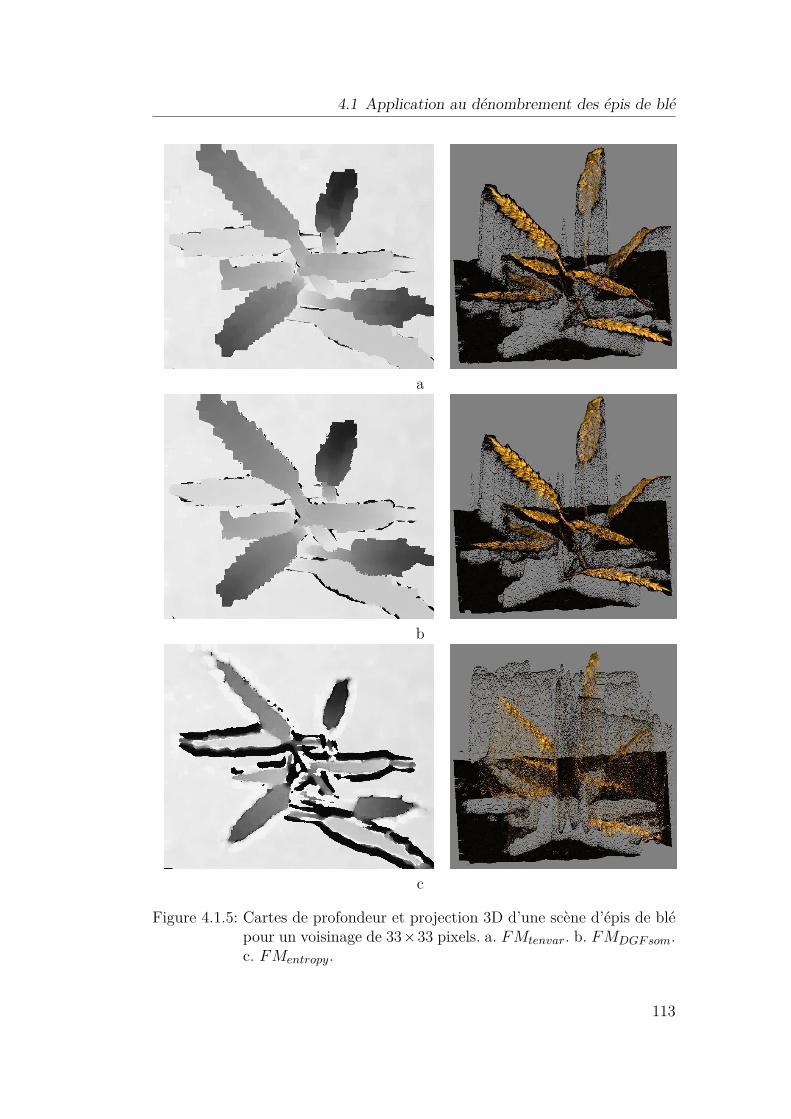
4.1 Application au dénombrement des épis de blé
a
b
c
Figure 4.1.5: Cartes de profondeur et projection 3D d’une scène d’épis de blépour un voisinage de 33×33 pixels. a. FMtenvar. b. FMDGF som.c. FMentropy.
113

Chapitre 4 Applications
milaire à FMtenvar. Le 3eme opérateur FMentropy, considéré médiocre par
les études statistiques, présente un comportement effectivement bien moins
adapté à une bonne estimation de la profondeur de la scène. La différence de
résultats est moins flagrante pour un petit voisinage de mesure pour lequel on
remarque surtout des erreurs importantes au niveau des bordures. Cependant,
pour un voisinage de taille plus importante, beaucoup d’erreurs apparaissent
entrainant une estimation imprécise de plusieurs zones de la scène considérée.
Afin de visualiser plus facilement ces erreurs d’estimation sur les bordures, les
superpositions des images nettes et des cartes de profondeur sont illustrées
figure 4.1.6.
4.2 Application à l’étude de croissance de
plante
Les problématiques récurrentes lors de l’étude des plantes sont la détection
de maladies, le suivi de croissance ou encore l’estimation d’un volume foliaire.
Ainsi, les scènes étudiées dans ce contexte sont plutôt des plantes en processus
de croissance et constituées en partie de feuilles. Pour ce second type de scène,
le choix s’est porté sur la plante Millepertuis dont un extrait d’images acquises
par le système final se trouve figure 4.2.1. L’intérêt de cette scène réside dans
la présence de feuilles à différentes profondeurs tout au long de la tige.
La séquence originale se compose de 22 images avec un espacement d’un
centimètre. De la même façon que pour la séquence d’épis de blé, les résultats
de 3 opérateurs de mesure de netteté sont comparés. Ainsi, les cartes de pro-
fondeur et les projections 3D obtenues pour un voisinage de 9×9 pixels sont
illustrées figure 4.2.2. Pour un voisinage de 33 × 33 pixels, les résultats sont
présentés figure 4.2.3.
Contrairement à la scène constituée d’épis de blé, celle-ci est nettement
moins texturée et donc, présente moins de composantes hautes fréquences.
Cependant, on constate que l’estimation de profondeur reste cohérente face
à la scène visualisée et le dégradé de profondeur des différentes feuilles. Un
suivi de croissance automatique de plantes est donc envisageable. On remarque
114

4.2 Application à l’étude de croissance de plante
a d
b e
c f
Figure 4.1.6: Superposition de l’image nette à la carte de profondeur. a.FMtenvar et voisinage 9×9. b. FMDGF som et voisinage 9×9. c.FMentropy et voisinage 9 × 9. d. FMtenvar et voisinage 33 × 33.e. FMDGF som et voisinage 33 × 33. f. FMentropy et voisinage33×33.
115

Chapitre 4 Applications
Figure 4.2.1: Extrait d’images de la séquence de la plante Millepertuis issuedu système final.
que, quelle que soit la taille de voisinage, cela entraine moins de différences
sur le résultat que pour une scène plus texturée. Toutefois, on note toujours
une réduction des artefacts d’erreur et des contours de feuilles moins bien
discriminés pour une taille de voisinage plus élevée (33×33 pixels) facilement
visualisables figure 4.2.4.
Pour ce qui est de la comparaison visuelle des résultats de chaque opéra-
teur, les résultats sont toujours en accord avec les comportements mis en avant
par les études statistiques. Ainsi, l’opérateur FMentropy est nettement moins
efficace pour un voisinage important mais plus proche de la réalité pour un
petit voisinage. Les résultats sont cependant moins bons que pour les deux
autres opérateurs. De même que pour la séquence des épis de blé, notre opé-
rateur FMDGF som reste très proche dans ses estimations de la topographie
de l’opérateur FMtenvar identifié comme étant le plus performant.
116

4.2 Application à l’étude de croissance de plante
a
b
c
Figure 4.2.2: Cartes de profondeur et projection 3D scène Millepertuis pourun voisinage de 9 × 9 pixels. a. FMtenvar. b. FMDGF som. c.FMentropy.
117

Chapitre 4 Applications
a
b
c
Figure 4.2.3: Cartes de profondeur et projection 3D scène Millepertuis pourun voisinage de 33 × 33 pixels. a. FMtenvar. b. FMDGF som. c.FMentropy.
118

4.2 Application à l’étude de croissance de plante
a d
b e
c f
Figure 4.2.4: Superposition de l’image nette à la carte de profondeur. a.FMtenvar et voisinage 9×9. b. FMDGF som et voisinage 9×9. c.FMentropy et voisinage 9 × 9. d. FMtenvar et voisinage 33 × 33.e. FMDGF som et voisinage 33 × 33. f. FMentropy et voisinage33×33.
119

Chapitre 4 Applications
4.3 Application à l’analyse de défaillances de
circuits intégrés
Initialement, la méthode « Shape from Focus » était principalement utilisée
pour des applications microscopiques. En effet, la faible profondeur de champ
due à l’utilisation de microscopes nécessite l’emploi de cette méthode que ce
soit pour générer une profondeur de champ étendue de la scène considérée
ou estimer la topographie d’objets microscopiques. Ce besoin de profondeur
de champ étendue apparaît dans le domaine de l’analyse de défaillances de
circuits intégrés. L’analyse de défaillances d’un circuit correspond au proces-
sus intervenant en aval des tests de robustesse et de qualité de conception si
ceux-ci ne sont pas concluants. Le constat de défaillance issu des tests entraine
le besoin de déterminer si le circuit considéré est un cas isolé ou un problème
récurrent. L’analyse de défaillances du circuit revient à extraire des informa-
tions pertinentes telles que la localisation des défauts. Cette dernière s’appuie
sur une image physique du composant (nommée pattern) sur laquelle est su-
perposée l’information mesurée (telle que les zones d’émissions caractérisant
un défaut). Cette image de pattern permet non seulement à l’utilisateur de se
repérer dans le composant mais également de réaliser la mise au point sur la
zone visualisée.
La localisation des défauts est rendue possible par l’utilisation d’outils d’ob-
servation adaptés tels que la microscopie à émission de lumière par le biais
de systèmes dédiés à l’analyse de défaillances comme le système TriPHEMOS
(Hamamatsu Photonics, Hamamatsu, Japon). Ce type d’appareil intègre plu-
sieurs méthodes de localisation de défauts qui nécessitent toujours une étape
de préparation du circuit à étudier. Cette phase passe par différentes actions
qui, du fait de la faible profondeur de champ du système d’acquisition, exigent
une profondeur de champ étendue afin d’obtenir une visualisation nette de la
zone de localisation des défauts . Ces différentes actions créant un flou sur
l’image de pattern sont :
1. Polissage de la face arrière. Cette première étape a pour but de ré-
duire l’épaisseur de substrat en silicium afin de permettre une meilleure
120

4.3 Application à l’analyse de défaillances de circuits intégrés
transmission des rayons infrarouges. En effet, le silicium a la particu-
larité de se comporter comme un milieu transparent pour cette gamme
de longueurs d’onde. Cependant, la traversée du substrat par le fais-
ceau engendre tout de même des perturbations des signaux réfléchis
donc il convient de réduire ce substrat afin de limiter les perturbations.
L’inconvénient de ce polissage est le fait que la surface polie n’est pas
parfaitement plane. Ce défaut peut entrainer l’apparition de zones floues
dans les images du circuit étudié.
2. Couplage du circuit à une carte de stimulation électrique. La
localisation de défauts nécessitant un circuit en cours de fonctionnement,
celui-ci est connecté à une carte de stimulation. Cependant, à l’image des
défauts de polissage, cette carte peut former des zones floues du fait que
l’ensemble de la scène visualisée n’est pas parfaitement perpendiculaire
au système d’acquisition.
3. Mise au point sur la zone étudiée. Suite aux étapes précédentes,
le circuit est placé dans l’appareil d’analyse et son positionnement est
effectué visuellement de façon à considérer la zone étudiée du circuit.
Une fois positionné, la faible profondeur de champ induite par le système
optique ne permet pas l’obtention d’une zone nette en tout point de la
surface analysée du fait de l’épaisseur variable des éléments constituant
la partie du circuit analysé.
Cette dernière étape nécessite une visualisation qui est rendue possible, dans le
cas présent, par une caméra basée sur un capteur InGaAs (Arséniure d’indium-
gallium) disposant d’une sensibilité spectrale en proche infrarouge de 900 nm
à 1550 nm. La définition des images acquises est de 640 par 512 pixels avec
des photo-éléments de 20 µm de large. Cette caméra a permis l’acquisition de
la séquence d’images mise à ma disposition par le laboratoire d’expertise du
CNES (Centre National d’Etudes Spatiales). L’objectif utilisé conjointement
à la caméra permet un grossissement 20× et une variation de la distance de
mise au point entre chaque acquisition génère la séquence d’images. Un extrait
de cette dernière constituée initialement de 35 images est illustré figure 4.3.1
et représente une partie d’un microcontrôleur (ARM Cortex M4 STM32).
On remarque sur ces extraits, un déplacement de la zone de netteté du
121

Chapitre 4 Applications
Figure 4.3.1: Extrait d’images de la séquence du microcontrôleur.
coin en haut à gauche pour la 1ere image jusqu’au coin en bas à droite sur
la 3eme. De façon à obtenir une image entièrement nette de la scène et donc
une extension de la profondeur de champ, les étapes 2 et 3 de notre processus
d’estimation de la profondeur (figure 4.0.1) sont mises en œuvre. De la même
façon que pour les applications précédentes, les résultats de l’image de pro-
fondeur de champ étendue issus des 3 opérateurs de mesure de netteté sont
présentés pour un voisinage de 9× 9 et 33× 33 (figure 4.3.2). Cette scène est
bien différente des scènes précédemment étudiées du fait de l’aspect artifi-
ciel et manufacturé de celle-ci. Cependant, le caractère texturé est toujours
présent mais très variable d’une zone à l’autre du circuit.
L’opérateur FMtenvar génère une image entièrement nette faisant état de
peu d’artefacts et ceci pour les 2 tailles de voisinage. Notre opérateur FMDGF som
produit une image nette proche de celle obtenue par l’opérateur FMtenvar pour
122

4.3 Application à l’analyse de défaillances de circuits intégrés
a d
b e
c f
Figure 4.3.2: Images de profondeur de champ étendue d’une partie de micro-contrôleur. a. FMtenvar et voisinage 9×9. b. FMDGF som et voi-sinage 9×9. c. FMentropy et voisinage 9×9. d. FMtenvar et voi-sinage 33×33. e. FMDGF som et voisinage 33×33. f. FMentropy
et voisinage 33×33.
123

Chapitre 4 Applications
un voisinage de 33× 33 pixels mais ce qui n’est plus le cas pour un voisinage
plus petit où la présence d’erreurs d’estimation est plus importante. Pour ce
qui est de l’opérateur FMentropy, les résultats reflètent encore un manque de
justesse de l’estimation des pixels nets par rapport aux autres opérateurs.
Même si le type de scène change, les comportements des opérateurs suivent
toujours ceux mis en évidence dans le chapitre précédent.
Une image entièrement nette de la scène analysée est donc réalisable par
le processus de reconstruction. Cette extension de la profondeur de champ
permet donc de pallier aux différents défauts induits lors de la préparation du
circuit intégré étudié et de proposer une visualisation nette en tout point à
l’utilisateur.
124

4.4 Conclusion
4.4 Conclusion
Ce chapitre présente tout d’abord l’ensemble du processus d’estimation de
la profondeur mis en place basé sur la méthode « Shape from Focus ». Deux
applications agronomiques correspondant à 2 scènes différentes sont présentées
avec les résultats obtenus pour 3 opérateurs de mesure de netteté et 2 tailles
de voisinage différents. Le processus d’estimation de la profondeur est ensuite
appliqué à une problématique d’analyse de défaillances de circuit intégré qui
nécessite une profondeur de champ étendue. Cette dernière est rendue possible
par la création d’une image entièrement nette de la zone du circuit étudié à
partir d’une séquence d’images à différentes distances de mise au point.
Quels que soit les résultats des applications, on constate que le classement
des 3 opérateurs étudiés est toujours le même. Les comportements réels des
opérateurs valident le processus d’étude statistique mis en place au chapitre
précédent permettant une prédiction du comportement. Ainsi, l’opérateur
basé sur la mesure de variance de l’amplitude du gradient (FMtenvar) reste
l’opérateur présentant les meilleurs résultats. Notre opérateur basé sur les
descripteurs généralisés de Fourier FMDGF som fait cependant état de bonnes
performances notamment pour les scènes agronomiques. Comme prévu par
les études statistiques, l’opérateur mesurant la quantité locale d’information
(FMentropy) n’est pas un opérateur permettant une bonne estimation de la
profondeur. Le protocole d’étude du comportement des opérateurs présenté
au chapitre précédent, s’il est effectué pour le type de scène considérée par
l’utilisateur, permet de déterminer le ou les opérateurs adaptés au proces-
sus d’estimation de la profondeur. L’avantage principal est une prédiction en
amont permettant une estimation de la profondeur de scènes inconnues et de
pallier au manque de vérité terrain.
Les résultats obtenus pour différents types de scène confirment le postulat
de départ qui est que la méthode « Shape from Focus » est pertinente tant
que la scène est texturée. En effet, l’estimation de profondeur sur une scène
texturée comme celle comportant les épis de blé est moins affectée par les
erreurs qu’une scène moins texturée comme la plante Millepertuis. Cependant,
les images résultantes de l’estimation de profondeur de cette dernière sont tout
125

Chapitre 4 Applications
de même cohérentes à la scène visualisée, ce qui confirme la faisabilité de la
méthode sur ce type de scène.
A noter que les résultats présentés n’ont pas fait l’objet d’un post-traitement
visant à diminuer les erreurs afin de visualiser l’efficacité des opérateurs. Ceci
permet également de mettre en évidence le compromis à faire entre une petite
taille de voisinage impliquant une estimation de la profondeur moins lissée
et une taille plus importante diminuant les erreurs ponctuelles d’estimation.
Bien entendu, en fonction de la qualité des résultats obtenus pour une scène
particulière avec la taille de voisinage ainsi que l’opérateur adapté, la mise
en place de traitements de minimisation des erreurs peut être envisagée. On
peut, par exemple, envisager des traitements du type morphologie mathéma-
tique permettant une suppression des artefacts ponctuels apparaissant en cas
d’erreur. Cependant, il convient de toujours garder à l’esprit que de tels trai-
tements créent une modification de l’information pouvant dégrader la qualité
globale des données initiales.
126

Conclusion générale et
perspectives
Conclusion générale
Ce mémoire de doctorat présente le travail effectué sur la conception d’un
système de reconstruction 3D, basé sur la méthode « Shape from Focus », pour
lequel les applications visées sont en priorité agronomiques. Une notion récur-
rente apparait tout au long du processus de réflexion ayant permis d’aboutir
au système final : la notion de compromis. C’est en effet au travers de cette
notion que sont retrouvés les différents apports de cette recherche.
Le premier compromis concerne le choix de la méthode de reconstruction
3D utilisée. Ce choix a nécessité bien entendu une étude approfondie des
différentes méthodes existantes permettant l’obtention de l’information de
profondeur, étude qui constitue l’état de l’art présenté dans ce manuscrit.
Les avantages et inconvénients des méthodes ainsi que les contraintes liées
aux scènes naturelles, telles que la présence d’occlusions, ont permis de faire
ressortir la méthode « Shape from Focus » considérée comme la plus adaptée
dans notre cas. De plus, cette méthode se révèle intéressante d’un point de vue
recherche, de par sa mise en œuvre peu courante à une échelle macroscopique.
Cet état de l’art permet ainsi une vision plus claire des différents moyens
d’accès à l’information de profondeur pour les personnes non spécialisées dans
ce domaine. De plus, il convient de rappeler que le choix de la méthode à
utiliser est principalement lié aux contraintes induites par l’application visée
telles que la taille de la scène analysée, la vitesse d’acquisition souhaitée ou
127

Conclusion générale et perspectives
l’encombrement du système conçu.
Le second compromis intervient lors du dimensionnement du système d’ac-
quisition à utiliser. La précision de l’estimation de profondeur est directement
liée à la profondeur de champ induite par le système d’acquisition. En effet,
plus celle-ci est faible et plus l’incertitude quant à la position nette d’un point
particulier dans la séquence d’images est faible. En contrepartie, une forte
diminution de la profondeur de champ va engendrer une diminution des di-
mensions de la scène visualisée. Ceci vient du fait que la variation de plusieurs
paramètres du système d’acquisition dont la distance focale et la distance de
mise au point entrainent une réduction de la profondeur de champ mais éga-
lement une diminution du champ de vue. La réduction du champ de vue est
liée à ces deux derniers paramètres dès lors qu’une faible profondeur de champ
est requise. Ces notions sont détaillées dans le deuxième chapitre où une mise
en évidence de ce lien entre champ de vue et profondeur de champ est illus-
tré et permet d’orienter l’utilisateur pour le choix de l’objectif adapté à son
application.
La diminution de la profondeur de champ engendre un autre compromis
entre le nombre d’images acquises et la vitesse d’acquisition. Plus la profon-
deur de champ est faible, plus la précision du système est importante mais
plus le nombre d’images de la scène à acquérir augmente afin de couvrir une
même profondeur dans la scène considérée.
L’étape d’acquisition de la séquence d’images étant fondamentale pour une
estimation correcte de la profondeur, deux systèmes d’acquisition permettant
l’acquisition de la séquence d’images de la scène ont été conçus et présentés
dans le chapitre 2. Ils possèdent tous les deux des points forts et des points
faibles et, de fait, l’utilisation de l’un ou l’autre est défini en fonction de l’ap-
plication visée. Le premier système à déplacement linéaire du système d’ac-
quisition permet un changement d’objectif en fonction de la scène visualisée
ou de la précision en profondeur requise. Cependant, le déplacement linéaire
exige un temps d’acquisition de la séquence d’images long, notamment pour
des scènes profondes, mais également des vibrations nécessitant un recalage
des images de façon à ce qu’à chaque point de la scène soit associée la même
coordonnée de pixel pour chaque image. Le second système à objectif motorisé
128

Conclusion générale
s’affranchit de ce problème de vibrations tout en accélérant la procédure d’ac-
quisition de la séquence. De plus, son encombrement fortement réduit permet
un transport et une utilisation plus aisée sur le terrain. Cependant, le choix
des caractéristiques optiques pour ce type d’objectif est plus restreint que
pour des objectifs standards. Il existe des objectifs motorisés permettant une
variation de la distance focale mais la complexité de conception de ces objec-
tifs est souvent liée à un diamètre d’ouverture plus faible. Ceci a pour effet
de produire une profondeur de champ plus importante et donc de diminuer la
précision. Les deux systèmes d’acquisition conçus sont donc complémentaires
et permettent une adaptabilité face aux applications futures.
La seconde étape fondamentale du processus d’estimation de la profondeur
est l’évaluation de la netteté locale de chaque pixel de la séquence d’images. Le
chapitre 3 y est consacré et présente en premier lieu un état de l’art des diffé-
rentes familles d’opérateurs de mesure de netteté. Á ces opérateurs de mesure
de netteté existants sont ajoutés deux nouveaux opérateurs développés durant
ces travaux de recherche et basés sur les descripteurs généralisés de Fourier.
L’idée principale dans le cadre du « Shape from Focus » est l’estimation de la
netteté d’un pixel de mêmes coordonnées dans chaque image correspondant
à un point unique de la scène. Pour un opérateur, une courbe de netteté est
obtenue dont le maximum renseigne sur la position de l’image de la séquence
où le point de la scène visualisé est le plus net. La profondeur réelle de ce point
dans l’espace peut donc être assimilée à la profondeur de cette image de la
séquence, connue par l’étape de calibrage du système d’acquisition. Pour une
estimation de la profondeur plus fine, une étape d’interpolation de la courbe
de netteté permet d’approximer la position du maximum de netteté.
Du fait du grand nombre d’opérateurs existants, une comparaison de l’effi-
cacité de ceux-ci est nécessaire afin de déterminer lesquels sont les plus adaptés
pour un cas particulier. Le type de scène considéré dans notre problématique,
à savoir les scènes agronomiques, ne s’apparente pas aux images habituelle-
ment utilisées pour la comparaison. Un protocole d’étude du comportement
des opérateurs basé sur un plan d’expériences factoriel est présenté. Contrai-
rement aux comparaisons usuelles de la littérature, cette étude permet une
analyse du comportement des opérateurs face aux variations de deux para-
129
Conclusion générale et perspectives
mètres affectant la mesure de netteté. Ces deux paramètres sont la taille de
voisinage locale considérée pour la mesure et la présence ou non de bruit
additif au voisinage. En effet, les comparaisons usuelles renseignent sur la ro-
bustesse des opérateurs face à une variation graduelle et simultanée des deux
paramètres. Notre protocole d’étude permet une mise en évidence de la ro-
bustesse des opérateurs face à l’un ou l’autre des paramètres. L’intérêt est de
pouvoir constater qu’un opérateur peut être robuste à un paramètre mais sen-
sible à un autre et sera plus adapté dans un cas particulier qu’un opérateur
de robustesse moyenne à tous les paramètres. L’étude est effectuée sur une
base d’images adaptée à l’application visée. Dans notre cas, la base d’images
de texture de scènes naturelles VisTex est utilisée [VisTex, 2002]. Ceci rend
possible une étude du comportement des opérateurs objective en fonction de
l’application et non une comparaison générique sur une base d’images de syn-
thèse. Á noter que la notion de compromis se retrouve dans le choix de la
taille de voisinage car une petite taille autorise une résolution spatiale plus
fine de l’estimation mais entraine cependant plus d’erreurs qu’une taille de
voisinage plus importante.
Dans le cadre d’une automatisation du processus d’estimation de la profon-
deur, deux méthodes (non supervisée et supervisée) d’évaluation de la netteté
sont proposées. La première se base sur la fusion de l’estimation de profondeur
issue de plusieurs opérateurs différents afin de pallier aux erreurs d’estimation
des uns et des autres. La seconde se base sur une analyse approfondie de l’effi-
cacité des opérateurs sur la base d’images VisTex afin de proposer l’opérateur
le plus adapté en fonction des paramètres de taille de voisinage et de présence
ou non de bruit additif. Cette méthode est très importante dans notre cas.
En effet, le processus d’estimation de la profondeur est voué à une utilisation
sur des scènes naturelles ponctuelles et uniques. Ceci entraine un manque de
vérité terrain permettant de quantifier l’efficacité des différents opérateurs de
mesure de netteté. L’analyse approfondie du comportement des opérateurs
permet de pallier à ce manque de vérité terrain par un choix en amont de
l’opérateur à utiliser en fonction du type de scène, de la taille de voisinage
souhaitée et du taux de bruit présent dans la séquence d’images.
Enfin, le chapitre 4 illustre les résultats d’estimation de la profondeur pour
130

Perspectives
plusieurs types de scènes différentes propres à des applications particulières.
L’illustration de ces résultats met en évidence un comportement analogue des
opérateurs de mesure de netteté entre les résultats de la reconstruction 3D
et les constats effectués lors de l’analyse approfondie du comportement des
opérateurs. Ainsi, un de nos opérateurs basés sur les descripteurs généralisés
de Fourier, même s’il n’est pas considéré comme le plus efficace des opéra-
teurs étudiés, fait état d’une efficacité supérieure à la majorité des autres
opérateurs. Il se positionne ainsi comme une alternative ou un complément
lorsque l’opérateur de référence fait état d’une diminution de l’efficacité lors
de l’estimation de netteté.
Pour résumer, les apports principaux de cette thèse sont la conception de
deux systèmes d’acquisition de séquences d’images, le développement de deux
nouveaux opérateurs de mesure de netteté ainsi que la mise en place d’un
protocole de comparaison de ces opérateurs original et adapté à l’applica-
tion. Ces différents apports contribuent au processus complet et automatisé
de reconstruction 3D et permettent de disposer d’un dispositif entièrement
fonctionnel.
Perspectives
Les perspectives de ces travaux sont non seulement l’amélioration du proces-
sus de reconstruction actuel mais également son utilisation à des applications
spécifiques.
Concernant l’amélioration de l’existant, cela consiste à surmonter les limites
de la méthode de reconstruction. Les principales sont le champ de vue réduit,
dès lors qu’une profondeur de champ très faible est requise, ainsi que le temps
de traitement élevé, causé par la mesure de netteté appliquée à chaque pixel
de chaque image de la séquence. Dès lors que le champ de vue n’est pas suffi-
samment étendu, une solution est la mutualisation des systèmes d’acquisition
et la reconstruction de panoramas afin de recréer une séquence d’images de la
scène. Un autre solution est liée à l’évolution des objectifs permettant une di-
minution de la focale tout en garantissant un diamètre d’ouverture élevé pour
131

Conclusion générale et perspectives
réduire la profondeur de champ. C’est le cas d’un objectif de focale 25 mm et
d’ouverture relative f0.95, à l’état de prototype au début de mes recherches,
qui est maintenant commercialisé par différents fabricants (Thalès Angénieux,
France et Voigtlander, Allemagne). Cet objectif permet donc un champ de vue
important de part sa focale de 25 mm tout en limitant la profondeur de champ
grâce à une ouverture relative minimum très faible (une ouverture f0.95 en-
traine deux fois plus de lumière reçue par le capteur qu’une ouverture f1.4, la
profondeur de champ s’en retrouve donc réduite). Pour ce qui est du temps de
traitement élevé de la séquence d’images, la solution passe par une implémen-
tation parallélisée des algorithmes. On pourra s’orienter vers une implémen-
tation de type GPGPU (General-purpose Processing on Graphics Processing
Units) afin de bénéficier de l’architecture des cartes graphiques plus adaptée
au traitement de données telles que les images. Á noter que notre processus de
reconstruction est très facilement parallélisable puisque le même traitement
est appliqué à chaque image de la séquence. Une implémentation parallèle est
donc bien plus adaptée dans ce cas qu’une implémentation séquentielle.
Outre l’utilisation des systèmes conçus au sein du laboratoire dans le cadre
d’applications futures, on notera une adaptabilité du processus de reconstruc-
tion à d’autres systèmes d’acquisition. C’est le cas des plateformes de phéno-
typage succinctement exposées en introduction, où les systèmes d’acquisition
reposent pour la plupart sur une base « caméra et objectif motorisé ». Une
implémentation de la méthode est donc réalisable directement, permettant
l’estimation de la profondeur en tout point de la scène visualisée sans ajout
de matériel. Cette information de profondeur est nécessaire dans le cadre de
phénotypage de plante afin de proposer un suivi de croissance ou de renseigner
sur la disposition spatiale des différents éléments des plantes analysées. De
plus, en prenant l’exemple de la plateforme de phénotypage de Dijon, chaque
cellule d’acquisition est équipée de deux systèmes d’acquisition. On pourrait
ainsi envisager une estimation de la profondeur de la plante en vues de dessus
et de côté puis une fusion de l’information 3D afin de pallier aux limites de
visibilité liées à l’utilisation d’un seul système (plusieurs vues entrainent une
diminution des zones cachées). Cette fusion des données de profondeur passe
par l’utilisation d’algorithmes de type ICP (Iterative Closest Point) [Besl et
132

Perspectives
McKay, 1992] et d’autres méthodes dont un état de l’art est réalisé par [Ma-
tabosch et al., 2005].
133


Publications
Revues
– "3D Image Acquisition System Based on Shape from Focus Technique",
Bastien Billiot, Frédéric Cointault, Ludovic Journaux, Jean-Claude Si-
mon, Pierre Gouton, Sensors, 2013.
Conférences internationales et nationales
– "Mesure de netteté basée sur les descripteurs généralisés de Fourier appli-
quée à la reconstruction 3D par Shape from Focus", Bastien Billiot, Fré-
déric Cointault, Pierre Gouton, 24ème colloque GRETSI, Brest, France,
2013.
– "3D acquisition system applied to agronomic scenes", Bastien Billiot,
Pierre Gouton, Frédéric Cointault, International Conference on Precision
Agriculture, Indianapolis, États-Unis, 2012.
– « Reconstruction monoculaire 3D de scènes agronomiques », Bastien Billiot,
Frédéric Cointault, Pierre Gouton, ORASIS - Congrès des jeunes cher-
cheurs en vision par ordinateur, Praz-sur-Arly, France, 2011.
Workshop
– « Imagerie 3D – PPHD Dijon, Présentation & Applications », Bastien
Billiot, Frédéric Cointault, Colloque INRA, Montpellier, France, 2012.
135

– « L’utilisation de la proxi-détection 3D pour la caractérisation du blé »,
Bastien Billiot, Frédéric Cointault, Atelier proxi-détection, Montpellier,
France, 2012.
– « Système d’acquisition dédié à la reconstruction 3D de scènes agrono-
miques », Bastien Billiot, Forum des Jeunes Chercheurs, Dijon, France,
2011.
136

Annexe
Figure 4.4.1: Base de texture VisTex
137


Bibliographie
[Adams, 2002] Adams, M. (2002). Coaxial range measurement-current trends
for mobile robotic applications. Sensors Journal, IEEE, 2(1) :2–13.
Cité page 20
[AER, 2013] AER (2013). http ://www.cmm.com.sg.
2 citations pages xiii et 11
[Ahmad et Choi, 2007] Ahmad, M. B. et Choi, T. S. (2007). Application of
three dimensional shape from image focus in lcd/tft displays manufacturing.
Consumer Electronics, IEEE Transactions on, 53(1) :1–4. Cité page 70
[An et al., 2008] An, Y., Kang, G., Kim, I.-J., Chung, H.-S., et Park, J.
(2008). Shape from focus through laplacian using 3d window. In Future
Generation Communication and Networking, 2008. FGCN’08. Second In-
ternational Conference on, volume 2, pages 46–50. IEEE. Cité page 70
[Asif et Choi, 2001] Asif, M. et Choi, T. (2001). Shape from focus using mul-
tilayer feedforward neural networks. Image Processing, IEEE Transactions
on, 10(11) :1670–1675. Cité page 80
[Bailey, 2002] Bailey, T. (2002). Mobile Robot Localisation and Mapping in
Extensive Outdoor Environments. PhD thesis. Cité page 24
[Barnard et Fischler, 1982] Barnard, S. et Fischler, M. (1982). Computational
stereo. ACM Computing Surveys (CSUR), 14(4) :553–572. Cité page 20
[Batlle et al., 1998] Batlle, J., Mouaddib, E., et Salvi, J. (1998). Recent pro-
gress in coded structured light as a technique to solve the correspondence
problem : a survey. Pattern recognition, 31(7) :963–982. Cité page 16
139

BIBLIOGRAPHIE
[Besl et McKay, 1992] Besl, P. J. et McKay, N. D. (1992). Method for registra-
tion of 3-d shapes. In Robotics-DL tentative, pages 586–606. International
Society for Optics and Photonics. Cité page 133
[Bouguet, 2010] Bouguet, J. (2010). Camera calibration toolbox.
Cité page 56
[Brenner et al., 1976] Brenner, J., Dew, B., Horton, J., King, T., Neurath, P.,
et Selles, W. (1976). An automated microscope for cytologic research a pre-
liminary evaluation. Journal of Histochemistry & Cytochemistry, 24(1) :100.
Cité page 70
[Carrihill et Hummel, 1985] Carrihill, B. et Hummel, R. (1985). Experiments
with the intensity ratio depth sensor. Computer Vision, Graphics, and
Image Processing, 32(3) :337–358. 3 citations pages xiii, 18 et 19
[Caspi et al., 1998] Caspi, D., Kiryati, N., et Shamir, J. (1998). Range ima-
ging with adaptive color structured light. Pattern Analysis and Machine
Intelligence, IEEE Transactions on, 20(5) :470–480. Cité page 17
[Chane et al., 2012] Chane, C. S., Mansouri, A., Marzani, F. S., et Boochs,
F. (2012). Integration of 3d and multispectral data for cultural heritage
applications : Survey and perspectives. Image and Vision Computing.
Cité page 15
[Chéné et al., 2012] Chéné, Y., Rousseau, D., Lucidarme, P., Bertheloot, J.,
Caffier, V., Morel, P., Belin, É., et Chapeau-Blondeau, F. (2012). On the
use of depth camera for 3d phenotyping of entire plants. Computers and
Electronics in Agriculture, 82 :122–127. Cité page 17
[Cheung et al., 2003] Cheung, G., Baker, S., et Kanade, T. (2003). Visual
hull alignment and refinement across time : A 3d reconstruction algorithm
combining shape-from-silhouette with stereo (pdf). Cité page 24
[Choi et Yun, 2000] Choi, T. et Yun, J. (2000). Three-dimensional shape
recovery from the focused-image surface. Optical Engineering, 39 :1321.
Cité page 80
[Clerc et Mallat, 2002] Clerc, M. et Mallat, S. (2002). The texture gra-
dient equation for recovering shape from texture. Pattern Analy-
sis and Machine Intelligence, IEEE Transactions on, 24(4) :536–549.
2 citations pages xiii et 22
140

BIBLIOGRAPHIE
[Cointault et al., 2008] Cointault, F., Guérin, D., Guillemin, J., et Chopinet,
B. (2008). In-field wheat ears counting using colour-texture image analysis.
New Zealand Journal of Crop and Horticultural Science, 36(2) :117–130.
Cité page 106
[Courteille, 2006] Courteille, F. (2006). Vision monoculaire : contributions
théoriques et application à la numérisation des documents. PhD thesis.
Cité page 23
[Darrell et Wohn, 1988] Darrell, T. et Wohn, K. (1988). Pyramid based depth
from focus. pages 504–509. Cité page 58
[Doyon, 2000] Doyon, D. (2000). Scanner à rayons X : tomodensitométrie.
Elsevier Masson. Cité page 12
[Doyon, 2004] Doyon, D. (2004). IRM : imagerie par résonance magnétique.
Elsevier Masson. Cité page 12
[Falco, 2010] Falco, P. (2010). La photographie. Cité page 42
[Faugeras, 1993] Faugeras, O. (1993). Three-dimensional computer vision : a
geometric viewpoint. the MIT Press. Cité page 21
[Favaro et al., 2003] Favaro, P., Mennucci, A., et Soatto, S. (2003). Observing
shape from defocused images. International Journal of Computer Vision,
52(1) :25–43. Cité page 25
[Favaro et Soatto, 2002] Favaro, P. et Soatto, S. (2002). Learning shape
from defocus. In Computer Vision—ECCV 2002, pages 735–745. Sprin-
ger. 2 citations pages xiii et 26
[Firestone et al., 1991] Firestone, L., Cook, K., Culp, K., Talsania, N., et
Preston Jr, K. (1991). Comparison of autofocus methods for automated
microscopy. Cytometry, 12(3) :195–206. 2 citations pages 72 et 80
[Forsyth, 2002] Forsyth, D. (2002). Shape from texture without boundaries.
page III : 225 ff. Cité page 21
[Gauthier et al., 1991] Gauthier, J.-P., Bornard, G., et Silbermann, M.
(1991). Motions and pattern analysis : harmonic analysis on motion groups
and their homogeneous spaces. Systems, Man and Cybernetics, IEEE Tran-
sactions on, 21(1) :159–172. Cité page 75
141

BIBLIOGRAPHIE
[Gholipour et al., 2007] Gholipour, A., Kehtarnavaz, N., Briggs, R., Devous,
M., et Gopinath, K. (2007). Brain functional localization : a survey of
image registration techniques. Medical Imaging, IEEE Transactions on,
26(4) :427–451. Cité page 52
[Grimson, 1981] Grimson, W. E. L. (1981). A computer implementation of a
theory of human stereo vision. Philosophical Transactions of the Royal So-
ciety of London. Series B, Biological Sciences, pages 217–253. Cité page 7
[Groen et al., 1985] Groen, F., Young, I., et Ligthart, G. (1985). A compari-
son of different focus functions for use in autofocus algorithms. Cytometry,
6(2) :81–91. Cité page 72
[Haber-Pohlmeier et Pohlmeier, 2010] Haber-Pohlmeier, S. et Pohlmeier, A.
(2010). A new window to the rhizosphere by magnetic resonance imaging.
In EGU General Assembly Conference Abstracts, volume 12, page 15371.
Cité page 12
[Haralick et al., 1973] Haralick, R. M., Shanmugam, K., et Dinstein, I. H.
(1973). Textural features for image classification. Systems, Man and Cy-
bernetics, IEEE Transactions on, (6) :610–621. Cité page 75
[Hartley, 2008] Hartley, R. (2008). Multiple view geometry in computer vision.
Cambridge University Press. Cité page 20
[Hasinoff et Kutulakos, 2009] Hasinoff, S. W. et Kutulakos, K. N. (2009).
Confocal stereo. Int. J. Comput. Vision, 81 :82–104. Cité page 28
[Helmli et Scherer, 2001] Helmli, F. et Scherer, S. (2001). Adaptive shape
from focus with an error estimation in light microscopy. In Image and
Signal Processing and Analysis, 2001. ISPA 2001. Proceedings of the 2nd
International Symposium on, pages 188–193. IEEE. Cité page 74
[Horn, 1970] Horn, B. K. (1970). Shape from shading : A method for obtaining
the shape of a smooth opaque object from one view. Technical report,
Cambridge, MA, USA. Cité page 22
[Inokuchi et al., 1984] Inokuchi, S., Sato, K., et Matsuda, F. (1984). Range
imaging system for 3-d object recognition. In Proceedings of the Interna-
tional Conference on Pattern Recognition, pages 806–808. Cité page 16
142

BIBLIOGRAPHIE
[Ishii et al., 2007] Ishii, I., Yamamoto, K., Tsuji, T., et al. (2007). High-speed
3d image acquisition using coded structured light projection. In Intelligent
Robots and Systems, 2007. IROS 2007. IEEE/RSJ International Confe-
rence on, pages 925–930. IEEE. Cité page 17
[Jolliffe, 2005] Jolliffe, I. (2005). Principal component analysis. Wiley Online
Library. Cité page 77
[Journaux et al., 2011] Journaux, L., Simon, J.-C., Destain, M.-F., Cointault,
F., Miteran, J., et Piron, A. (2011). Plant leaf roughness analysis by texture
classification with generalized fourier descriptors in different dimensionality
reduction context. Precision Agriculture, 12(3) :345–360. Cité page 75
[Kanatani et Chou, 1989] Kanatani, K. et Chou, T. (1989). Shape from tex-
ture : General principle. 38(1) :1–48. Cité page 21
[Kirk, 1995] Kirk, R. E. (1995). Experimental design : procedures for the
behavioral sciences. Cité page 95
[Krähenbühl et al., 2012] Krähenbühl, A., Kerautret, B., Debled-Rennesson,
I., Longuetaud, F., et Mothe, F. (2012). Knot detection in x-ray ct images
of wood. In Advances in Visual Computing, pages 209–218. Springer.
Cité page 12
[Kristan et al., 2006] Kristan, M., Pers, J., Perse, M., et Kovacic, S. (2006).
A bayes-spectral-entropy-based measure of camera focus using a dis-
crete cosine transform. Pattern Recognition Letters, 27(13) :1431–1439.
Cité page 73
[Krotkov, 1987] Krotkov, E. (1987). Focusing. International journal of com-
puter vision, 1(3) :223–237. 2 citations pages 71 et 72
[Kusada, 1996] Kusada, Y. (1996). Focus detecting device having light dis-
tribution detection. US Patent 5,485,003. Cité page 68
[Laurentini, 1994] Laurentini, A. (1994). The visual hull concept for
silhouette-based image understanding. IEEE Transactions on Pattern Ana-
lysis and Machine Intelligence, pages 150–162. Cité page 24
[Le Chevalier, 2002] Le Chevalier, F. (2002). Principles of radar and sonar
signal processing. Artech House Publishers. Cité page 13
143

BIBLIOGRAPHIE
[Lippmann, 1908] Lippmann, G. (1908). Epreuves reversibles. photogra-
phies integrals. Comptes-Rendus Academie des Sciences, 146 :446–451.
Cité page 29
[Mahmood et Choi, 2008] Mahmood, M. et Choi, T. (2008). A feature analy-
sis approach to estimate 3d shape from image focus. In Image Processing,
2008. ICIP 2008. 15th IEEE International Conference on, pages 3216–3219.
IEEE. Cité page 73
[Malik et Choi, 2008] Malik, A. et Choi, T. (2008). A novel algorithm
for estimation of depth map using image focus for 3d shape reco-
very in the presence of noise. Pattern Recognition, 41(7) :2200–2225.
3 citations pages xv, 73 et 83
[Marr et Poggio, 1977] Marr, D. et Poggio, T. (1977). A theory of human
stereo vision. Technical report, Cambridge, MA, USA. Cité page 7
[Maruyama et Abe, 1993] Maruyama, M. et Abe, S. (1993). Range sen-
sing by projecting multiple slits with random cuts. Pattern Analy-
sis and Machine Intelligence, IEEE Transactions on, 15(6) :647–651.
3 citations pages xiii, 17 et 18
[Matabosch et al., 2005] Matabosch, C., Salvi, J., Fofi, D., et Meriaudeau, F.
(2005). Range image registration for industrial inspection. In Electronic
Imaging 2005, pages 216–227. International Society for Optics and Photo-
nics. Cité page 133
[Mattia et al., 2003] Mattia, F., Le Toan, T., Picard, G., Posa, F. I., D’Ales-
sio, A., Notarnicola, C., Gatti, A. M., Rinaldi, M., Satalino, G., et Pasqua-
riello, G. (2003). Multitemporal c-band radar measurements on wheat fields.
Geoscience and Remote Sensing, IEEE Transactions on, 41(7) :1551–1560.
Cité page 13
[McBratney, 2000] McBratney, A. (2000). Pv or not pv ? In 5th Internatio-
nal Symposium on Cool Climate Viticulture and Oenology, 16-20 January
2000, Melbourne, Australia [Archivo de ordenador] : proceedings of the In-
ternational Symposium on Grapevine Phylloxera Management. Winetitles.
Cité page 2
[Minhas et al., 2009] Minhas, R., Mohammed, A. A., Wu, Q. J., et Sid-
Ahmed, M. A. (2009). 3d shape from focus and depth map computation
144

BIBLIOGRAPHIE
using steerable filters. In Image Analysis and Recognition, pages 573–583.
Springer. Cité page 74
[Miyasaka et al., 2000] Miyasaka, T., Kuroda, K., Hirose, M., et Araki,
K. (2000). High speed 3-d measurement system using incoherent light
source for human performance analysis. INTERNATIONAL ARCHIVES
OF PHOTOGRAMMETRY AND REMOTE SENSING, 33(B5/2 ; PART
5) :547–551. Cité page 18
[Nair et Stewart, 1992] Nair, H. et Stewart, C. (1992). Robust focus ran-
ging. In Computer Vision and Pattern Recognition, 1992. Proceedings CV-
PR’92., 1992 IEEE Computer Society Conference on, pages 309–314. IEEE.
Cité page 60
[Nayar, 1989] Nayar, S. K. (1989). Shape from focus. Technical report.
3 citations pages 26, 71 et 79
[Ng, 2006] Ng, R. (2006). Digital light field photography. PhD thesis, stanford
university. Cité page 29
[Niederöst et al., 2002] Niederöst, M., Niederöst, J., et Scucky, J. (2002). Au-
tomatic 3d reconstruction and visualization of microscopic objects from
a monoscopic multifocus image sequence. In International Workshop
on Visualization and Animation of Reality based 3D Models. Citeseer.
2 citations pages 80 et 108
[Noguchi et Nayar, 1994] Noguchi, M. et Nayar, S. (1994). Microscopic shape
from focus using active illumination. pages A :147–152. Cité page 69
[Omasa et al., 2007] Omasa, K., Hosoi, F., et Konishi, A. (2007). 3d lidar
imaging for detecting and understanding plant responses and canopy struc-
ture. Journal of Experimental Botany, 58(4) :881–898. Cité page 20
[Pajes et Forest, 2004] Pajes, Jordi, S. J. et Forest, J. (2004). A new optimised
de bruijn coding strategy for structured light patterns. In Pattern Recog-
nition, 2004. ICPR 2004. Proceedings of the 17th International Conference
on, volume 4, pages 284–287. IEEE. 3 citations pages xiii, 17 et 18
[Pech-Pacheco et al., 2000] Pech-Pacheco, J., Cristobal, G., Chamorro-
Martinez, J., et Fernandez-Valdivia, J. (2000). Diatom autofocusing in
brightfield microscopy : a comparative study. In icpr, page 3318. Published
by the IEEE Computer Society. Cité page 71
145
BIBLIOGRAPHIE
[Pentland, 1987] Pentland, A. (1987). A new sense for depth of field. Pattern
Analysis and Machine Intelligence, IEEE Transactions on, (4) :523–531.
2 citations pages 25 et 38
[Pentland et al., 1994] Pentland, A., Scherock, S., Darrell, T., et Girod, B.
(1994). Simple range cameras based on focal error. JOSA A, 11(11) :2925–
2934. Cité page 25
[Pertuz et al., 2012] Pertuz, S., Puig, D., et Angel Garcia, M. (2012). Ana-
lysis of focus measure operators for shape-from-focus. Pattern Recognition.
Cité page 81
[Pollefeys et al., 2004] Pollefeys, M., Van Gool, L., Vergauwen, M., Verbiest,
F., Cornelis, K., Tops, J., et Koch, R. (2004). Visual modeling with a
hand-held camera. International Journal of Computer Vision, 59 :207–232.
Cité page 23
[Posdamer et Altschuler, 1982] Posdamer, J. et Altschuler, M. (1982). Sur-
face measurement by space-encoded projected beam systems. Computer
graphics and image processing, 18(1) :1–17. 2 citations pages xiii et 16
[Pribanić et al., 2009] Pribanić, T., Džapo, H., et Salvi, J. (2009). Efficient
and low-cost 3d structured light system based on a modified number-
theoretic approach. EURASIP Journal on Advances in Signal Processing,
2010(1) :474389. 3 citations pages xiii, 17 et 18
[Rocchini et al., 2001] Rocchini, C., Cignoni, P., Montani, C., Pingi, P., et
Scopigno, R. (2001). A low cost 3d scanner based on structured light.
In Computer Graphics Forum, volume 20, pages 299–308. Wiley Online
Library. Cité page 16
[Rovira-Más et al., 2008] Rovira-Más, F., Zhang, Q., et Reid, J. F. (2008).
Stereo vision three-dimensional terrain maps for precision agriculture. Com-
puters and Electronics in Agriculture, 60(2) :133–143. Cité page 21
[Salvi et al., 2010] Salvi, J., Fernandez, S., Pribanic, T., et Llado, X. (2010).
A state of the art in structured light patterns for surface profilometry.
Pattern recognition, 43(8) :2666–2680. Cité page 16
[Salvi et al., 2004] Salvi, J., Pages, J., et Batlle, J. (2004). Pattern
codification strategies in structured light systems. 37(4) :827–849.
2 citations pages 16 et 17
146

BIBLIOGRAPHIE
[Seugling, 2000] Seugling, R. M. (2000). Coordinate measuring machines.
Technical report. Cité page 10
[Shen et Chen, 2006] Shen, C. et Chen, H. (2006). Robust focus measure for
low-contrast images. In Consumer Electronics, 2006. ICCE’06. 2006 Di-
gest of Technical Papers. International Conference on, pages 69–70. IEEE.
2 citations pages 73 et 74
[Smach et al., 2008] Smach, F., Lemaître, C., Gauthier, J., Miteran, J., et
Atri, M. (2008). Generalized fourier descriptors with applications to objects
recognition in svm context. Journal of Mathematical Imaging and Vision,
30(1) :43–71. Cité page 75
[Subbarao, 1988] Subbarao, M. (1988). Parallel depth recovery by changing
camera parameters. In Proceedings of the International Conference on Com-
puter Vision, pages 149–155. Cité page 25
[Subbarao et Choi, 1995] Subbarao, M. et Choi, T. (1995). Accurate recovery
of three-dimensional shape from image focus. Pattern Analysis and Machine
Intelligence, IEEE Transactions on, 17(3) :266–274. Cité page 80
[Subbarao et al., 1993] Subbarao, M., Choi, T., et Nikzad, A. (1993). Focu-
sing techniques (journal paper). Optical Engineering, 32(11) :2824–2836.
Cité page 70
[Tajima et Iwakawa, 1990] Tajima, J. et Iwakawa, M. (1990). 3-d data ac-
quisition by rainbow range finder. In Pattern Recognition, 1990. Procee-
dings., 10th International Conference on, volume 1, pages 309–313. IEEE.
3 citations pages xiii, 18 et 19
[Tenenbaum, 1970] Tenenbaum, J. (1970). Accommodation in computer vi-
sion. PhD thesis. Cité page 70
[Thévenaz et al., 1998] Thévenaz, P., Ruttimann, U., et Unser, M. (1998).
A pyramid approach to subpixel registration based on intensity. IEEE
Transactions on Image Processing, 7(1) :27–41. Cité page 52
[Tsai, 1987] Tsai, R. (1987). A versatile camera calibration technique for
high-accuracy 3d machine vision metrology using off-the-shelf tv cameras
and lenses. Robotics and Automation, IEEE Journal of, 3(4) :323–344.
Cité page 56
147
BIBLIOGRAPHIE
[VisTex, 2002] VisTex (2002). Vision texture database. Maintained by the
Vision and Modeling group at the MIT Media Lab. web page :
http://vismod.media.mit.edu/vismod/imagery/VisionTexture/.
2 citations pages 82 et 130
[Vollath, 1987] Vollath, D. (1987). Automatic focusing by correlative me-
thods. J. Microsc., 147(3) :279–288. Cité page 74
[Vuylsteke et Oosterlinck, 1990] Vuylsteke, P. et Oosterlinck, A. (1990).
Range image acquisition with a single binary-encoded light pattern. Pattern
Analysis and Machine Intelligence, IEEE Transactions on, 12(2) :148–164.
3 citations pages xiii, 17 et 18
[Watanabe et Nayar, 1995] Watanabe, M. et Nayar, S. K. (1995). Telecen-
tric optics for constant magnification imaging. IEEE Trans. Pattern Anal.
Mach. Intell, 19 :1360–1365. Cité page 59
[Willson et Shafer, 1991] Willson, R. et Shafer, S. (1991). Dynamic lens com-
pensation for active color imaging and constant magnification focusing.
Technical Report CMU-RI-TR-91-26, Robotics Institute, Pittsburgh, PA.
3 citations pages xiv, 58 et 59
[Xie et al., 2006] Xie, H., Rong, W., et Sun, L. (2006). Wavelet-based focus
measure and 3-d surface reconstruction method for microscopy images. In
Intelligent Robots and Systems, 2006 IEEE/RSJ International Conference
on, pages 229–234. IEEE. Cité page 73
[Yang et Nelson, 2003] Yang, G. et Nelson, B. (2003). Wavelet-based autofo-
cusing and unsupervised segmentation of microscopic images. In Intelligent
Robots and Systems, 2003.(IROS 2003). Proceedings. 2003 IEEE/RSJ In-
ternational Conference on, volume 3, pages 2143–2148. IEEE. Cité page 73
[Zhang et al., 1999] Zhang, R., Tsai, P., Cryer, J., et Shah, M. (1999). Shape-
from-shading : a survey. Pattern Analysis and Machine Intelligence, IEEE
Transactions on, 21 :690–706. Cité page 22
[Zhang, 2000] Zhang, Z. (2000). A flexible new technique for camera calibra-
tion. Pattern Analysis and Machine Intelligence, IEEE Transactions on,
22(11) :1330–1334. Cité page 56
148

BIBLIOGRAPHIE
[Zitova et Flusser, 2003] Zitova, B. et Flusser, J. (2003). Image registra-
tion methods : a survey. Image and vision computing, 21(11) :977–1000.
Cité page 52
[Zwaenepoel et al., 1997] Zwaenepoel, P., Le Bars, J., et al. (1997). L’agri-
culture de précision. Cité page 1
149



Résumé
Dans le cadre de l’acquisition de l’information de profondeur de scènes texturées, un processus d’es-
timation de la profondeur basé sur la méthode de reconstruction 3D « Shape from Focus » est présenté
dans ce manuscrit. Les deux étapes fondamentales de cette approche sont l’acquisition de la séquence
d’images de la scène par sectionnement optique et l’évaluation de la netteté locale pour chaque pixel
des images acquises. Deux systèmes d’acquisition de cette séquence d’images sont présentés ainsi que
les traitements permettant d’exploiter celle-ci pour la suite du processus d’estimation de la profondeur.
L’étape d’évaluation de la netteté des pixels passe par la comparaison des différents opérateurs de me-
sure de netteté. En plus des opérateurs usuels, deux nouveaux opérateurs basés sur les descripteurs
généralisés de Fourier sont proposés. Une méthode nouvelle et originale de comparaison est développée
et permet une analyse approfondie de la robustesse à différents paramètres des divers opérateurs. Afin
de proposer une automatisation du processus de reconstruction, deux méthodes d’évaluation automa-
tique de la netteté sont détaillées. Finalement, le processus complet de reconstruction est appliqué à
des scènes agronomiques, mais également à une problématique du domaine de l’analyse de défaillances
de circuits intégrés afin d’élargir les domaines d’utilisation.
Mots clés : Reconstruction 3D ; Shape from Focus ; Mesure de netteté ; Descripteurs généralisés de
Fourier ; Evaluation de robustesse.
Abstract
In the context of the acquisition of depth information for textured scenes, a depth estimation process
based on a 3D reconstruction method called "shape from focus" is proposed in this thesis. The two
crucial steps of this approach are the image sequence acquisition of the scene by optical sectioning and
the local sharpness evaluation for each pixel of the acquired images. Two acquisition systems have been
developed and are presented as well as different image processing techniques that enable the image
exploitation for the depth estimation process. The pixel sharpness evaluation requires comparison of
different focus measure operators in order to determine the most appropriate ones. In addition to
the usual focus measure operators, two news operators based on generalized Fourier descriptors are
presented. A new and original comparison method is developped and provides a further analysis of
the robustness to various parameters of the focus measure operators. In order to provide an automa-
tic version of the reconstruction process, two automatic sharpness evaluation methods are detailed.
Finally, the whole reconstruction process is applied to agronomic scenes, but also to a problematic in
failure analysis domain aiming to expand to other applications.
Keywords : 3D reconstruction ; Shape from Focus ; Focus measure ; Generalized Fourier descriptors ;
Robustness evaluation.