
Computerassistierte Chirurgie und Telemedizin · Das Prinzip ist einfach: Man wählt klar...
47
Lehrbehelf: Navigation und Telemedizin Seite 1 von 47 © Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008 LEHRBEHELF zur Vorlesung Computerassistierte Chirurgie und Telemedizin Inkl. CD-ROM mit Original-Videos und Fallbeispielen © a.o. Univ.-Prof. Dr. Kurt Alexander SCHICHO Medizinische Universität Wien Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie Währinger Gürtel 18-20 A-1090 Wien
Transcript of Computerassistierte Chirurgie und Telemedizin · Das Prinzip ist einfach: Man wählt klar...

Lehrbehelf: Navigation und Telemedizin Seite 1 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
LEHRBEHELF zur Vorlesung
Computerassistierte Chirurgie und Telemedizin Inkl. CD-ROM mit Original-Videos und Fallbeispielen © a.o. Univ.-Prof. Dr. Kurt Alexander SCHICHO Medizinische Universität Wien Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie Währinger Gürtel 18-20 A-1090 Wien
Lehrbehelf: Navigation und Telemedizin Seite 2 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
Vorwort Die rasante Entwicklung auf dem Gebiet Physik sowie der Informations- und
Telekommunikationstechnologie wirkt sich in immer stärkerem Maße auf die Medizin
aus. Bekanntestes Beispiel dafür sind wohl bildgebende Verfahren wie
Computertomographie oder Magnetresonanztomographie, die aus dem klinischen
Alltag nicht mehr wegzudenken sind und deren Leistungsfähigkeit für die Diagnostik
entscheidend ist.
Etwa ab Mitte der 1990-iger Jahre zeichnet sich weltweit ein bis heute unvermindert
anhaltender Trend ab: „High Tech“ nicht nur in der Diagnostik, sondern auch direkt
am Operationstisch. Zentrale Idee ist der jahrhundertealte Wunsch, einen „gläsernen
Patienten“ zu schaffen, wobei dieser Begriff hier nicht im Sinne skeptischer
Datenschützer zu verstehen ist, die vor den Gefahren der Speicherung sensibler
medizinischer Daten warnen. Wir meinen damit, dass der Chirurg das Innere des
Menschen sieht, schon bevor er das Skalpell ansetzt. Die Radiologie ermöglicht zwar
wesentliche Fortschritte in diese Richtung, doch bisher musste trotz höchster Qualität
der bildgebenden Verfahren der Operateur die in diesen Darstellungen enthaltenen
Informationen erst mit dem „echten“ Patienten gedanklich abstimmen, gleichsam
zwei Welten „überlagern“. Die computerassistierte Navigation, um die es in dieser
Vorlesung geht, schafft den „gläsernen Patienten“ durch Fusion von
computererzeugten „künstlichen“ Informationen mit dem realen Patienten. Der
Operateur sieht tatsächlich unter die Oberfläche, in den Patienten, in dessen Organe
hinein. Er bekommt Informationen, wo er sich befindet.
Die Übertragung solcher elektronischen Informationsinhalte über Telekommunikation
wird dem weiten Feld der Telemedizin zugerechnet. In unserer Vorlesung
konzentrieren wir uns speziell auf solche Telemedizin-Anwendungen, wo
Telekommunikation mit Navigation kombiniert wird. Diese Konzepte eröffnen
zusätzlich zur Telekonsultation im Sinne einer Einbeziehung zusätzlicher Experten in
den Operationsverlauf auch neue Dimensionen in der medizinischen Aus- und
Weiterbildung. Dem Studierenden bietet sich erstmals die Gelegenheit, unabhängig
vom Aufenthaltsort immer wieder „echte“ Operationen live und aus nächster Nähe
mitzuerleben.
Lehrbehelf: Navigation und Telemedizin Seite 3 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
Ich hoffen, dass Sie in dieser Vorlesung viele Anregungen für Ihr Berufleben
mitnehmen können und wollen abschließend betonen, dass es gerade im sensiblen
Spannungsfeld zwischen Patient und Hochtechnologie auf den
verantwortungsbewussten und wohlüberlegten Einsatz der beeindruckenden
technischen Möglichkeiten ankommt. Daher soll Ihnen unsere Lehrveranstaltung
auch helfen, durch aktuelles Wissen über den Stand der Entwicklung Ihre eigene
Kritikfähigkeit in Fragen der „High Tech Medizin“ zu schärfen.
Dieses Manuskript enthält viele der in der Vorlesung besprochenen Folien und soll
Ihnen helfen, mit wenig Schreibarbeit den „roten Faden“ zu erkennen. Allerdings ist
es kein vollständiges Skriptum fürs Selbststudium, sondern eine Ergänzung zum
Vorlesungsbesuch.
Dr. Kurt Alexander Schicho

Lehrbehelf: Navigation und Telemedizin Seite 4 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
Inhaltsverzeichnis
Vorwort 2
1. Einleitung – Computerassistierte Chirurgie 5
1.1. Allgemeine Grundlagen von „Augmented Reality“ und Navigation 5
1.2. Die Registrierung 20
1.3. Klinische Anwendungsbeispiele 23
1.4. Genauigkeit der Navigation 32
2. Telemedizin 34
2.1. Einführung 34
2.2. Interaktive Telekonsultation 35
2.3. Der Telenavigations-Client 38
2.4. Skalierung des Aufwandes 41
3. Literatur 45

Lehrbehelf: Navigation und Telemedizin Seite 5 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
1. EINLEITUNG – COMPUTERASSISTIERTE CHIRURGIE Zu Beginn dieses Blockes werden die allgemeinen Grundlagen der
computerassistierten Chirurgie bzw. der Navigation erklärt. Im zweiten Teil werden
dann diese Anwendungen mit Telekommunikation kombiniert, um Telemedizin zu
verwirklichen.
1.1. Allgemeine Grundlagen von „Augmented Reality“ und Navigation
Schon seit jeher wird bei Untersuchungen das Gesehene mit Informationsinhalten
(abstrakt gesprochen), die man im Gehirn gespeichert hat, abgeglichen. Diese
gespeicherten Informationsinhalte bestehen z.B. aus dem Wissen, das man sich
beim Medizinstudium und in der Praxis angeeignet hat (Anatomie, Pathologie, …).
Die Kombination des real Gesehenen mit dem gespeicherten Wissen erfordert
allerdings die Vorstellungskraft des Untersuchers.
Heute kann die Technik diese Überlagerung von Informationsebenen vornehmen,
indem optische Informationen mit computergenerierten Darstellungen überlagert
werden. Die „reale“ Szene (z.B. durch OP-Mikroskope beobachtet) wird durch
Otoskop, anno 1865
© aus: „History of Endoscopy“, M.A. Reuter et al.
Das Gesehene muss in der Vorstellung mit dem Wissen des Betrachters überlagert werden
“Telekommunikation”?: Beschränkt auf gesprochene oder geschriebene Inhalte
Informationsverlust unvermeidbar!

Lehrbehelf: Navigation und Telemedizin Seite 6 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
Zusatzinformationen erweitert. Man spricht von „Augmented Reality“, was wörtlich so
viel heißt wie „erweiterte Wirklichkeit“.
Obwohl dies sehr „futuristisch“ klingt, handelt es sich keineswegs um Zukunftsmusik,
sondern um Technologien, die längst ihren Eingang in die klinische Routine
gefunden haben. Aus vielen Bereichen der Medizin ist Augmented Reality nicht mehr
wegzudenken. Nicht nur an großen Universitätskliniken und Forschungszentren ist
sie etabliert, wie diese beiden (mehrere Jahre alten!) Zeitungsausschnitte belegen.
Heute …
Lehrbehelf: Navigation und Telemedizin Seite 7 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
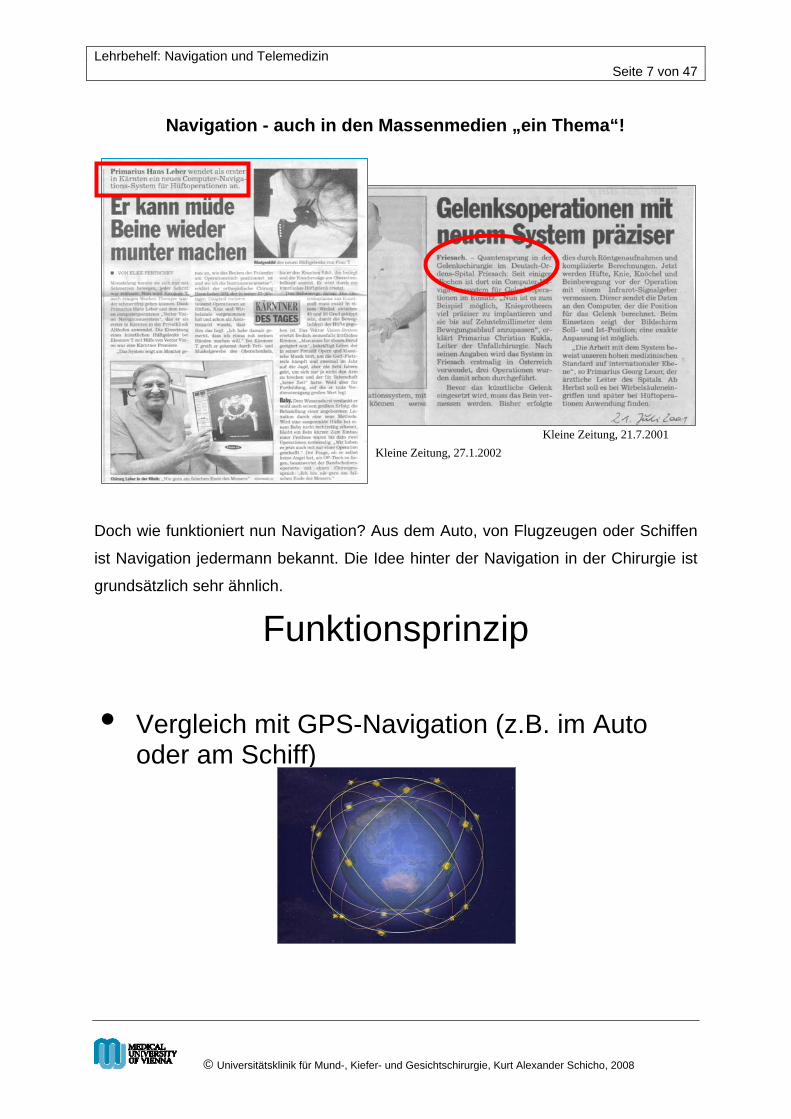
Doch wie funktioniert nun Navigation? Aus dem Auto, von Flugzeugen oder Schiffen
ist Navigation jedermann bekannt. Die Idee hinter der Navigation in der Chirurgie ist
grundsätzlich sehr ähnlich.
Navigation - auch in den Massenmedien „ein Thema“!
Kleine Zeitung, 21.7.2001Kleine Zeitung, 27.1.2002
Funktionsprinzip
• Vergleich mit GPS-Navigation (z.B. im Auto oder am Schiff)
Lehrbehelf: Navigation und Telemedizin Seite 8 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
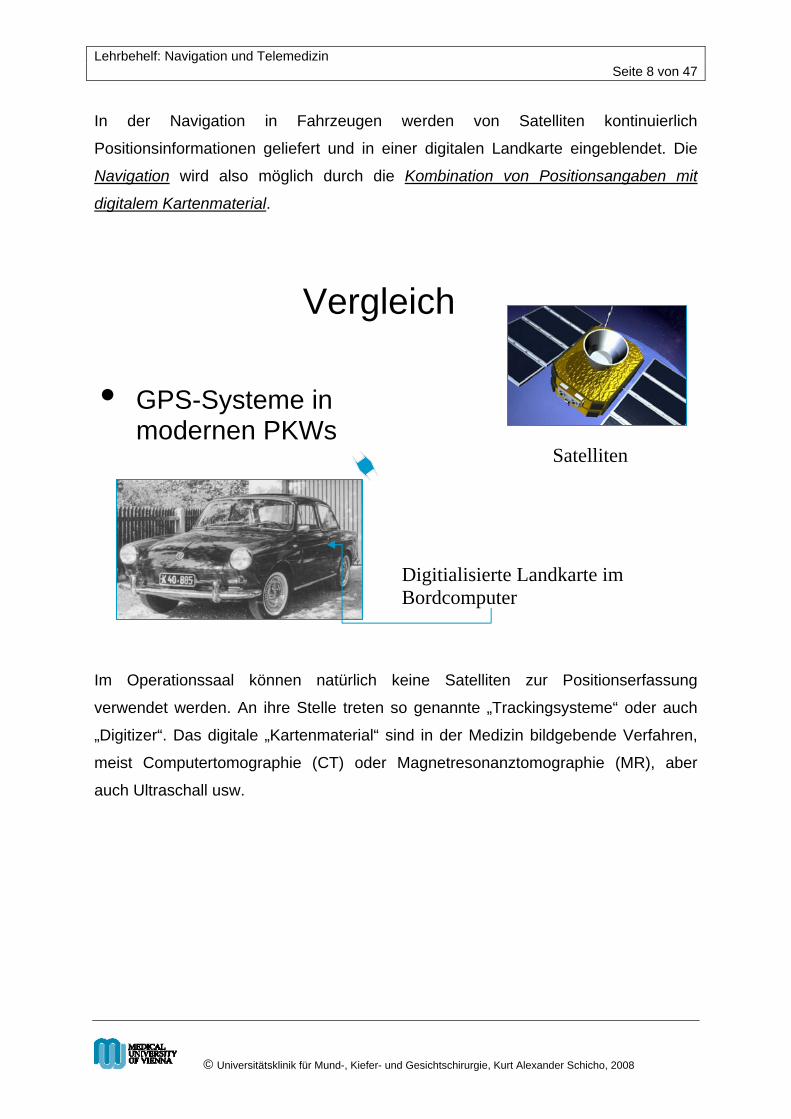
In der Navigation in Fahrzeugen werden von Satelliten kontinuierlich
Positionsinformationen geliefert und in einer digitalen Landkarte eingeblendet. Die
Navigation wird also möglich durch die Kombination von Positionsangaben mit
digitalem Kartenmaterial.
Im Operationssaal können natürlich keine Satelliten zur Positionserfassung
verwendet werden. An ihre Stelle treten so genannte „Trackingsysteme“ oder auch
„Digitizer“. Das digitale „Kartenmaterial“ sind in der Medizin bildgebende Verfahren,
meist Computertomographie (CT) oder Magnetresonanztomographie (MR), aber
auch Ultraschall usw.
Vergleich
• GPS-Systeme in modernen PKWs
Digitialisierte Landkarte im Bordcomputer
Satelliten

Lehrbehelf: Navigation und Telemedizin Seite 9 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
Diese Technologien zur Positionserfassung werden auch außerhalb der Medizin in
vielen Bereichen verwendet, etwa in virtuellen Fernsehstudios, zur Animation von
Zeichentrickfiguren oder in der Bewegungsanalyse für Sportler.
Navigation in der Chirurgie - Unterschiede zu GPS-Navigationssystemen
Satellit z.B. optoelektronische Trackingsysteme (Digitizer)
Landkarte z.B. aus CT-Daten berechnete 3D-Modelle des Schädels
Trackingsysteme
• Optoelektronisch – passiv
– aktiv
• Elektromagnetisch
• Ultraschall
• (mechanische – heute unbedeutend)

Lehrbehelf: Navigation und Telemedizin Seite 10 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
In der Medizin gibt es unterschiedlichste technische Lösungen dafür. Der Zweck ist
im Prinzip aber stets derselbe: Die kontinuierliche und genaue Erfassung von
Positionen.
Beispiel: Virtuelles TV-Studio
Beispiel: Bewegungsanalyse z.B. zur Animation von Zeichentrickfiguren
Lehrbehelf: Navigation und Telemedizin Seite 11 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
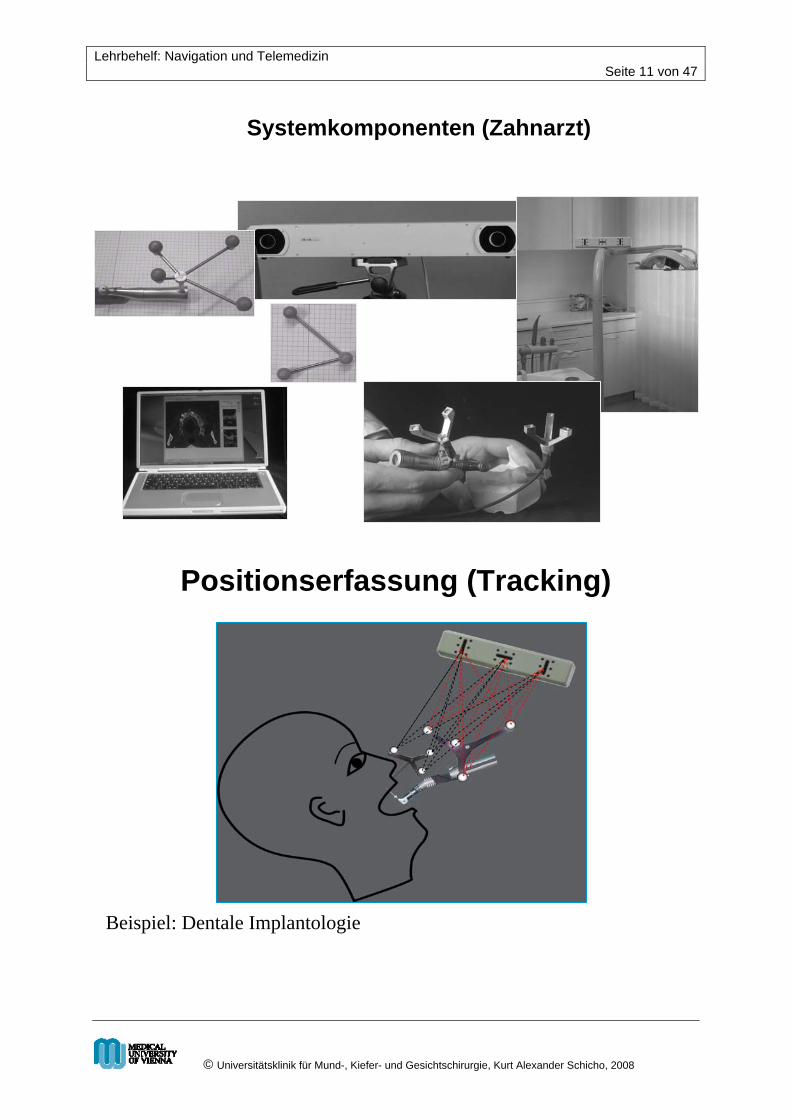
Systemkomponenten (Zahnarzt)
Positionserfassung (Tracking)
Beispiel: Dentale Implantologie

Lehrbehelf: Navigation und Telemedizin Seite 12 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
Systemkomponenten (Beispiel: Arthroskopie)
Beispiel: Passive Rigid Bodies („Sensoren“)

Lehrbehelf: Navigation und Telemedizin Seite 13 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
Ein modernes kommerzielles elektromagnetisches Trackingsystem (wie es auch an
unserer Klinik verwendet wird) zeigt die folgende Abbildung:
Das komplette Navigationssystem (Computer bzw. Workstation mit Trackingsystem)
sieht z.B. so aus:
Elektromagnetisches Tracking Beispiel: AuroraTM (NDI Northern Digital Inc.)

Lehrbehelf: Navigation und Telemedizin Seite 14 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
Bei optischen Trackingsystemen wird der OP-Bereich mit Infrarotlicht abgetastet,
welches an speziellen Sensoren (eine Bezeichung, die aus technischer Sicht
eigentlich nicht ganz korrekt ist, aber in der Medizin gebräuchlich ist) reflektiert wird.
Durch die unterschiedlichen geometrischen Bauformen der Sensoren kann der
Computer diese eindeutig erkennen und ihre Positionen bestimmen.
Moderne Navigationssysteme
Stryker Navigation System
Medtronic TreonTM
Lehrbehelf: Navigation und Telemedizin Seite 15 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
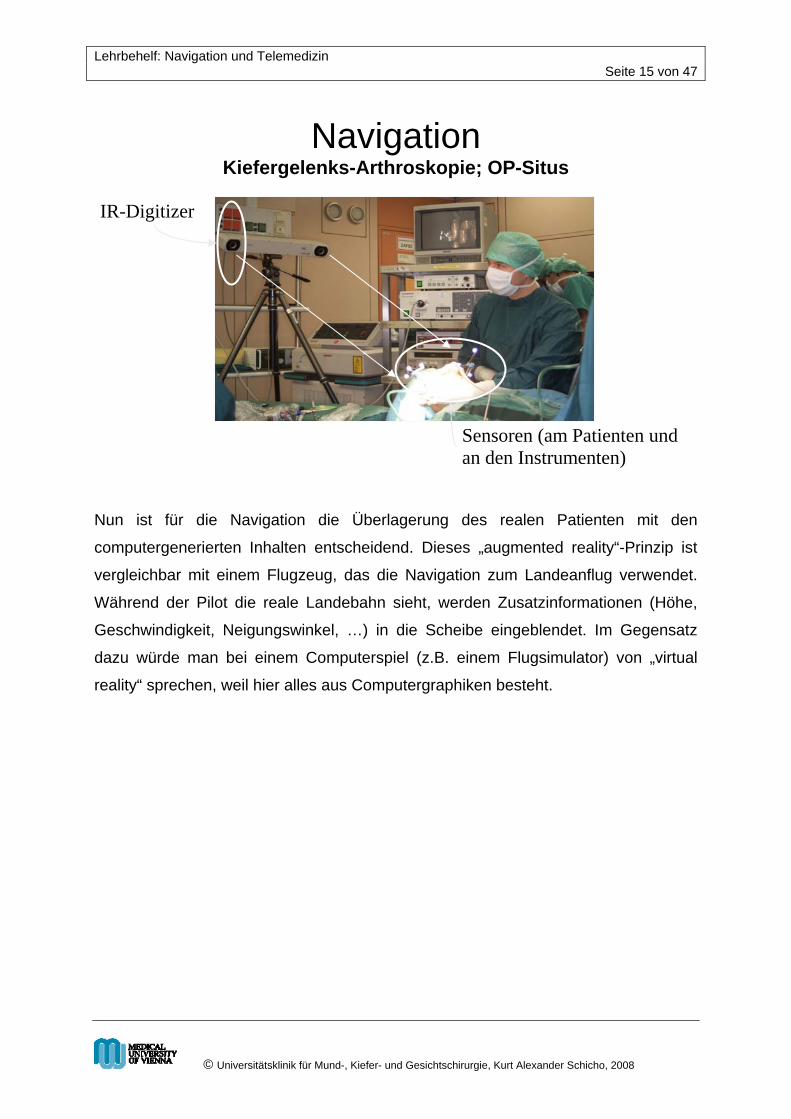
Nun ist für die Navigation die Überlagerung des realen Patienten mit den
computergenerierten Inhalten entscheidend. Dieses „augmented reality“-Prinzip ist
vergleichbar mit einem Flugzeug, das die Navigation zum Landeanflug verwendet.
Während der Pilot die reale Landebahn sieht, werden Zusatzinformationen (Höhe,
Geschwindigkeit, Neigungswinkel, …) in die Scheibe eingeblendet. Im Gegensatz
dazu würde man bei einem Computerspiel (z.B. einem Flugsimulator) von „virtual
reality“ sprechen, weil hier alles aus Computergraphiken besteht.
Navigation Kiefergelenks-Arthroskopie; OP-Situs
IR-Digitizer
Sensoren (am Patienten und an den Instrumenten)

Lehrbehelf: Navigation und Telemedizin Seite 16 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
„Augmented Reality“ in der Chirurgie
• „Virtual Reality“ – Künstlich generierte
Welt im Computer
• „Augmented Reality“ – Reale Welt wird
durch zusätzliche Informationen ergänzt
– Overlay-Graphiken
Prinzip der Image Fusion
Real World Live Video Images
Präoperative radiologische Aufnahmen
Augmented World
Image Fusion
Lehrbehelf: Navigation und Telemedizin Seite 17 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
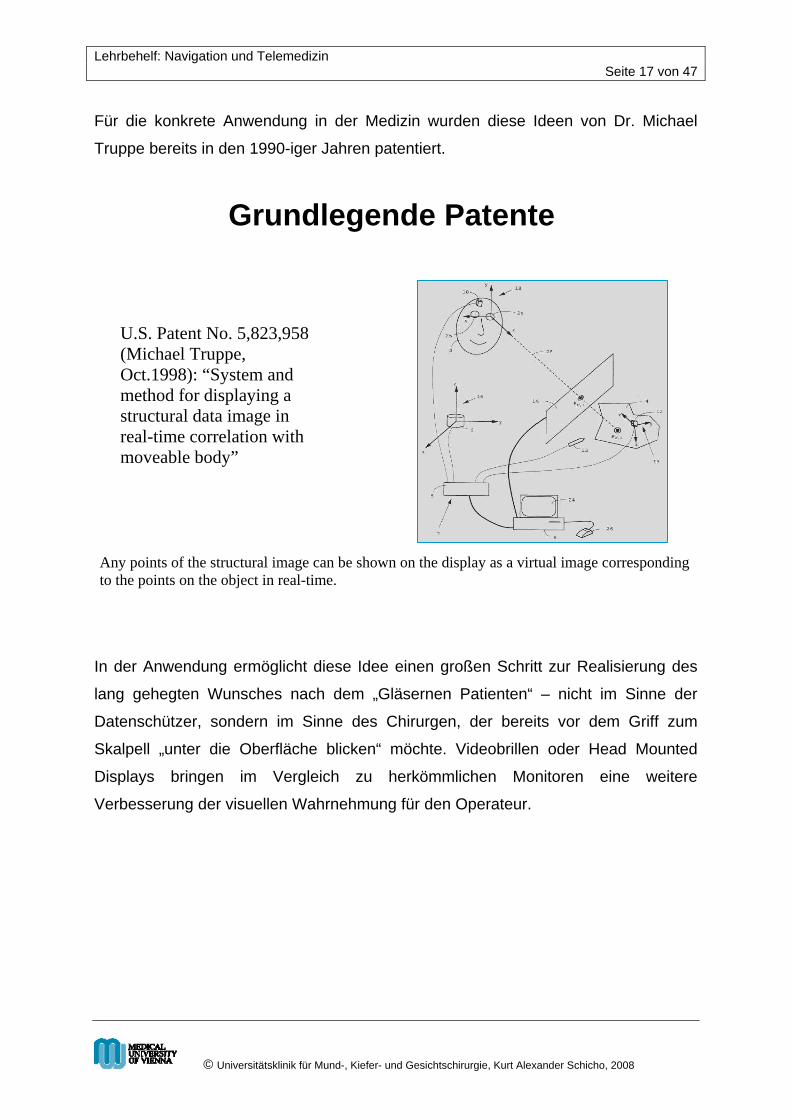
Für die konkrete Anwendung in der Medizin wurden diese Ideen von Dr. Michael
Truppe bereits in den 1990-iger Jahren patentiert.
In der Anwendung ermöglicht diese Idee einen großen Schritt zur Realisierung des
lang gehegten Wunsches nach dem „Gläsernen Patienten“ – nicht im Sinne der
Datenschützer, sondern im Sinne des Chirurgen, der bereits vor dem Griff zum
Skalpell „unter die Oberfläche blicken“ möchte. Videobrillen oder Head Mounted
Displays bringen im Vergleich zu herkömmlichen Monitoren eine weitere
Verbesserung der visuellen Wahrnehmung für den Operateur.
Grundlegende Patente
U.S. Patent No. 5,823,958 (Michael Truppe, Oct.1998): “System and method for displaying a structural data image in real-time correlation with moveable body”
Any points of the structural image can be shown on the display as a virtual image corresponding to the points on the object in real-time.

Lehrbehelf: Navigation und Telemedizin Seite 18 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
Kritische anatomische Strukturen (z.B. der Verlauf von Nerven oder Gefäßen)
können so sicher dargestellt und mit dem realen Patienten überlagert werden.
Head Mounted Displays: „Der Gläserne Patient“
Head Mounted Display

Lehrbehelf: Navigation und Telemedizin Seite 19 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
Die Begriffe „Videobrille“ und „Head Mounted Display“ werden häufig synonym
verwendet. Dennoch besteht der Unterschied streng genommen darin, dass bei
echten Head Mounted Displays laufend die Blickrichtung erfasst und die Einblendung
von Information daran angepasst wird.
Der Blick unter die Oberfläche
Real World
Augmented World
? .
Videobrillen vs. HMDs
• Videobrillen: Zeigen das Monitorbild
– ergonomische Vorteile: Operateur braucht nicht laufend auf den Monitor zu blicken
• HMDs: Getrackt
– passen die Darstellung kontinuierlich an die Blickrichtung des Operateurs an
Lehrbehelf: Navigation und Telemedizin Seite 20 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
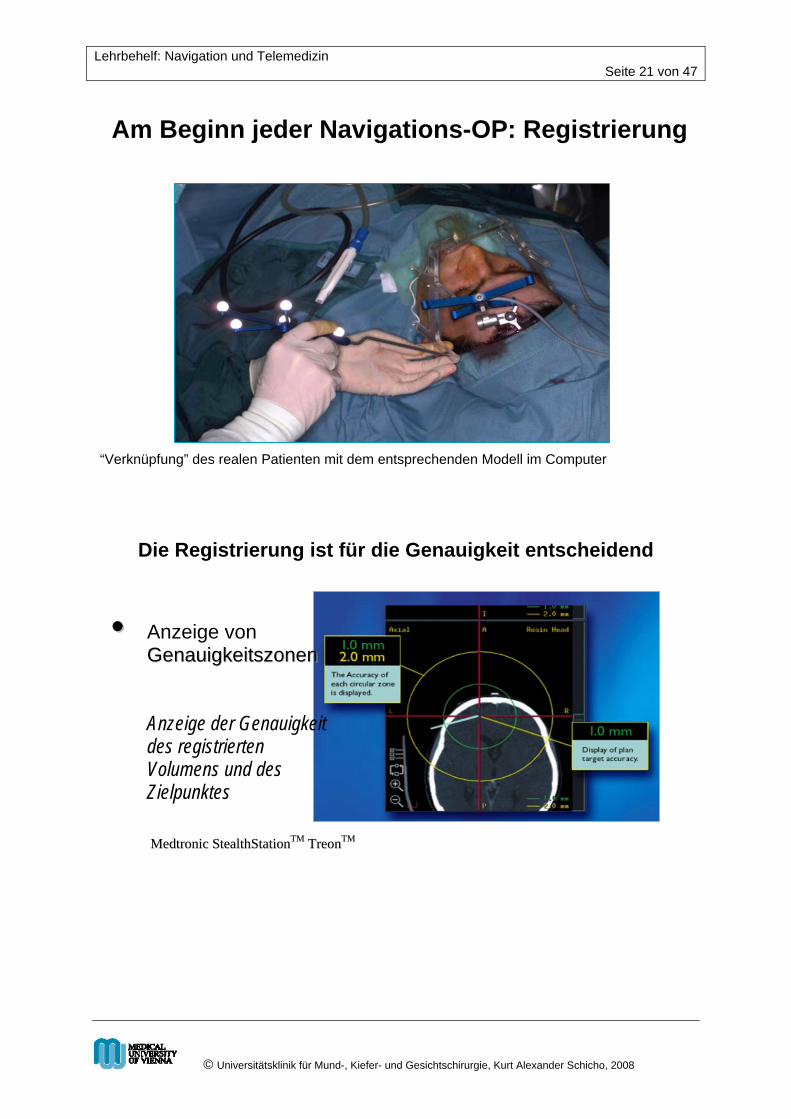
1.2. Die Registrierung
Ein entscheidender Schritt ist die Verknüpfung des „realen“ Patienten am
Operationstisch mit dem korrespondierenden Modell (2- und 3-dimensional, aus CT-
und MR-Aufnahmen rekonstruiert) im Computer. Dieser Schritt wird als
„Registrierung“ (manchmal auch „Referenzierung“) bezeichnet und ist für die
Genauigkeit des gesamten Ablaufes von entscheidender Bedeutung. Es wurden
bereits unzählige Registrierungsmethoden entwickelt, die jedoch alle demselben
Zweck dienen. Einige (vor allem besonders gebräuchliche) werden hier vorgestellt.
Das Prinzip ist einfach: Man wählt klar definierte und einwandfrei erkennbare Punkte
am Patienten (entweder anatomische Punkte, oder – was viel genauer ist –
zusätzlich angebrachte Markierungspunkte), und identifiziert diese Punkte in der
computertomographischen Darstellung. Während der Operation werden dann diese
Punkte nacheinander mit einem speziell kalibrierten Instrument („Pointer“), von
dessen Spitze die Koordinaten exakt bekannt sind, berührt. Damit wird eine
eindeutige Zuordnung zwischen dem realen Patienten und dem Modell im Computer
geschaffen. Die (aus der Mittelschul-Mathematik bestens bekannten)
Koordinatensysteme, auf die man sich dabei bezieht, werden in Form der vorhin
erwähnten Sensoren (auch „Tools“ genannt) am Patienten und an den verwendeten
chirurgischen Instrumenten (Sauger, Bohrer, Endoskop, …) befestigt. Jeder Sensor
bestimmt also ein Koordinatensystem, und diese bewegen sich relativ zueinander.
Lehrbehelf: Navigation und Telemedizin Seite 21 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
Am Beginn jeder Navigations-OP: Registrierung
“Verknüpfung” des realen Patienten mit dem entsprechenden Modell im Computer
Die Registrierung ist für die Genauigkeit entscheidend
•• Anzeige von GGeennaauuiiggkkeeiittsszzoonneenn
Anzeige der Genauigkeit
des registrierten Volumens und des Zielpunktes
MMeeddttrroonniicc SStteeaalltthhSSttaattiioonnTTMM TTrreeoonnTTMM
Lehrbehelf: Navigation und Telemedizin Seite 22 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
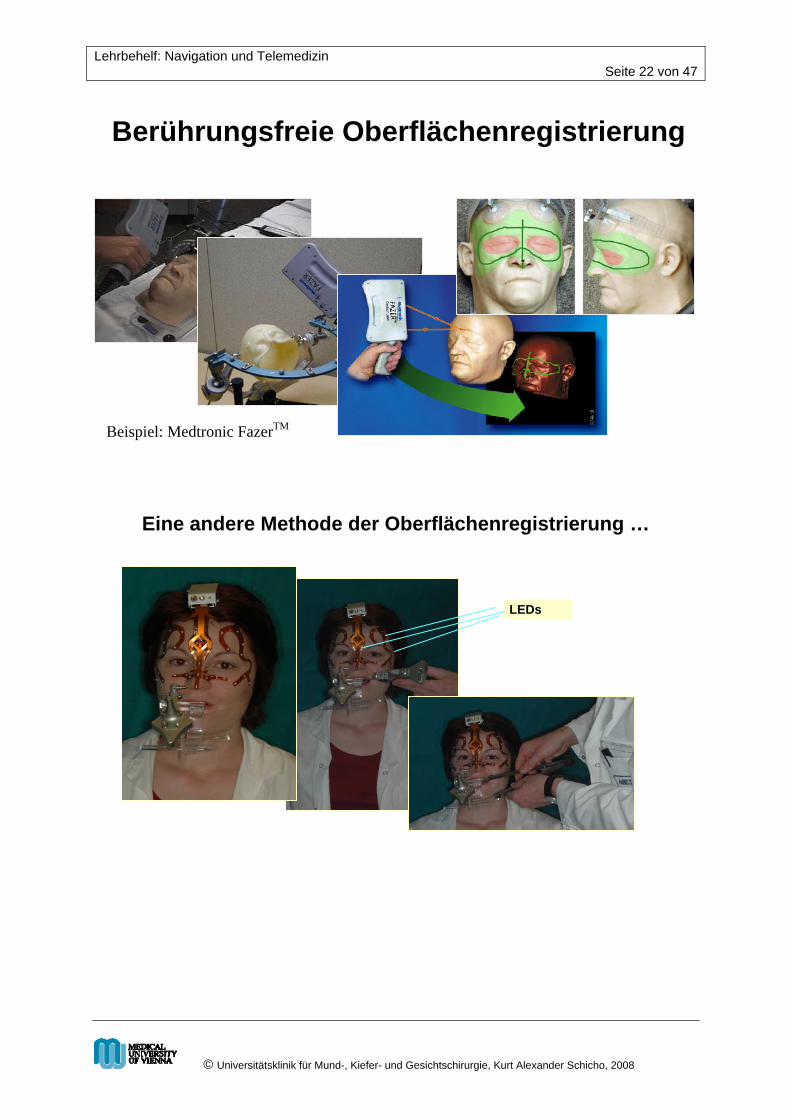
Berührungsfreie Oberflächenregistrierung
Beispiel: Medtronic FazerTM
Eine andere Methode der Oberflächenregistrierung …
LEDs
Lehrbehelf: Navigation und Telemedizin Seite 23 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
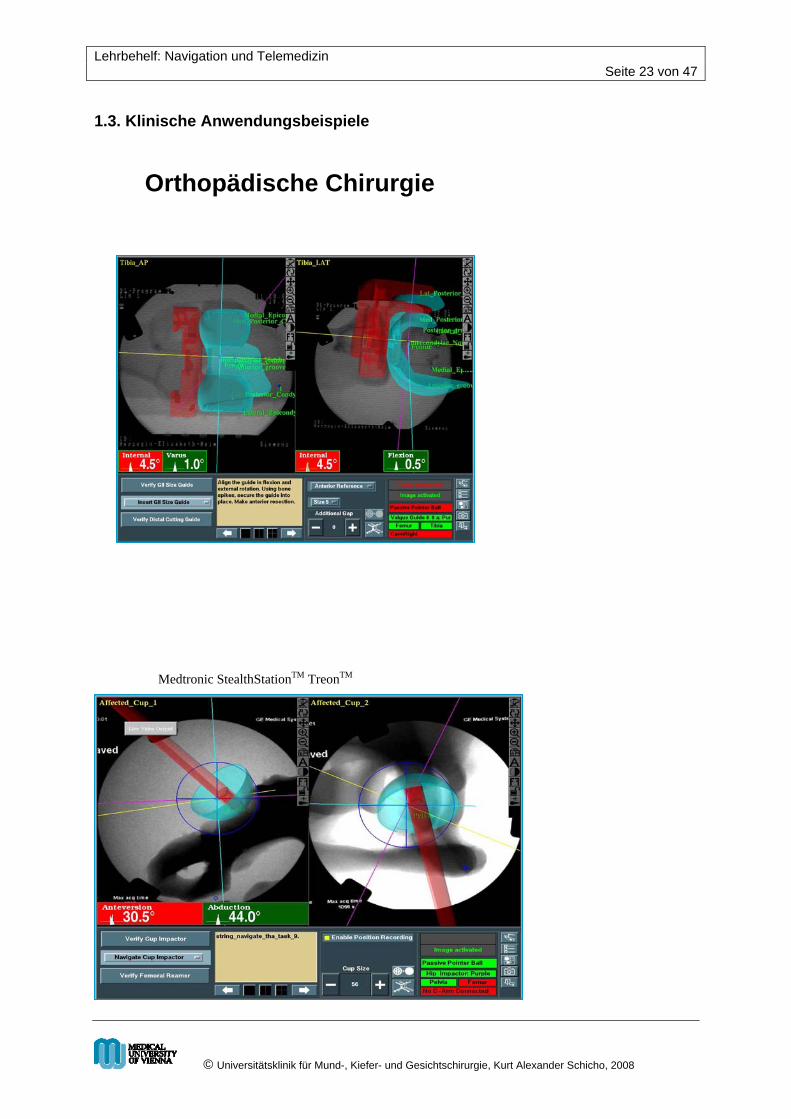
1.3. Klinische Anwendungsbeispiele
Orthopädische Chirurgie
Medtronic StealthStationTM TreonTM

Lehrbehelf: Navigation und Telemedizin Seite 24 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
Hals-, Nasen- und Ohrenheilkunde
Wirbelsäulenchirurgie
Medtronic StealthStationTM TreonTM
Lehrbehelf: Navigation und Telemedizin Seite 25 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
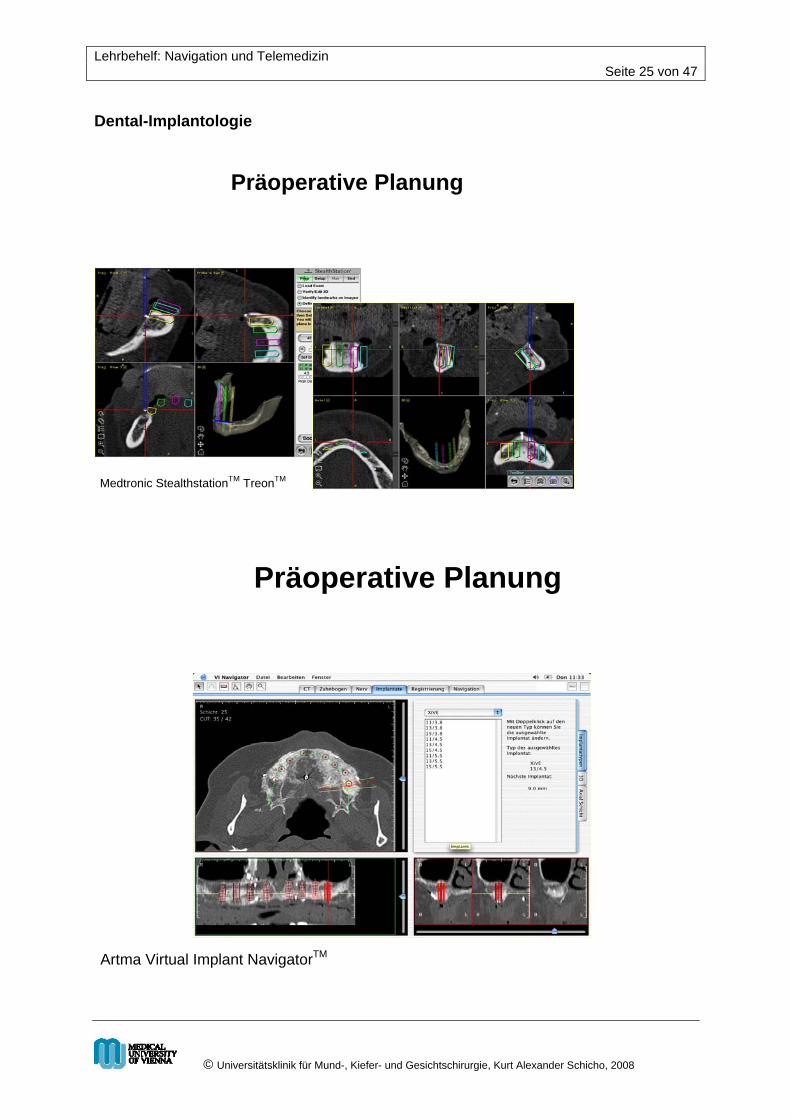
Dental-Implantologie
Präoperative Planung
Medtronic StealthstationTM TreonTM
Artma Virtual Implant NavigatorTM
Präoperative Planung
Lehrbehelf: Navigation und Telemedizin Seite 26 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
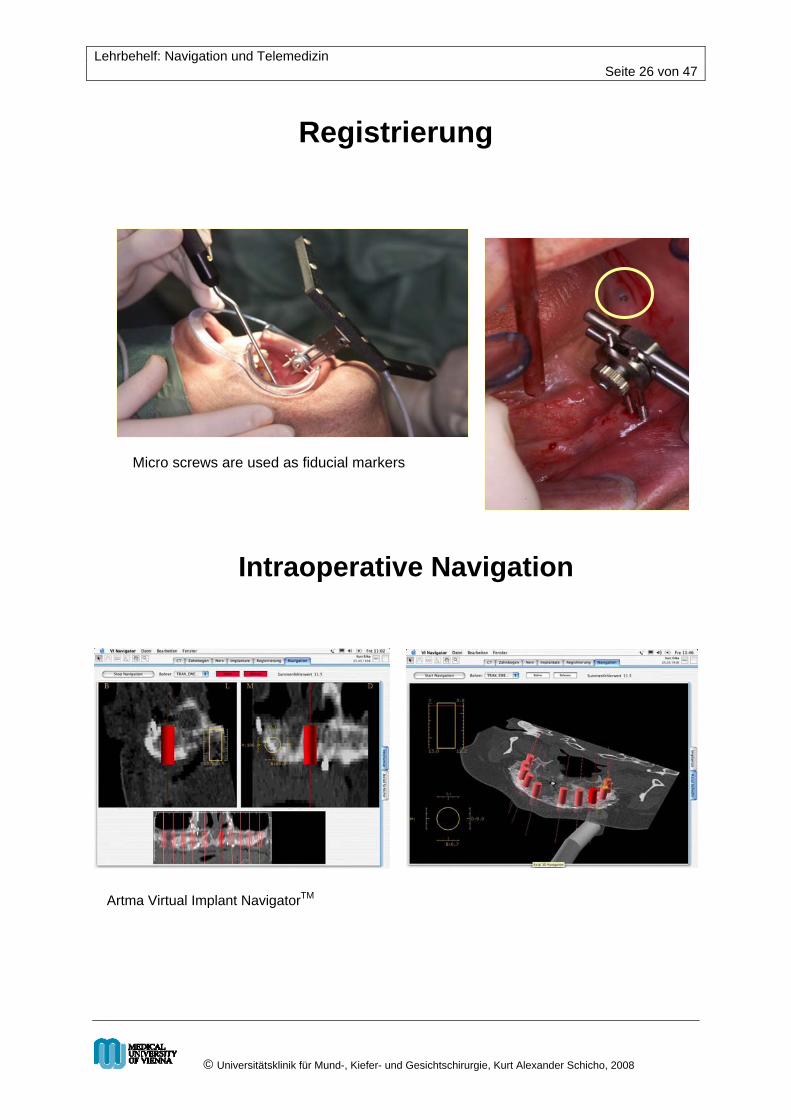
Registrierung
Micro screws are used as fiducial markers
Intraoperative Navigation
Artma Virtual Implant NavigatorTM

Lehrbehelf: Navigation und Telemedizin Seite 27 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
Virtual Implant NavigatorTM
Intraoperative Navigation
Postoperative Qualitätskontrolle
Lehrbehelf: Navigation und Telemedizin Seite 28 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
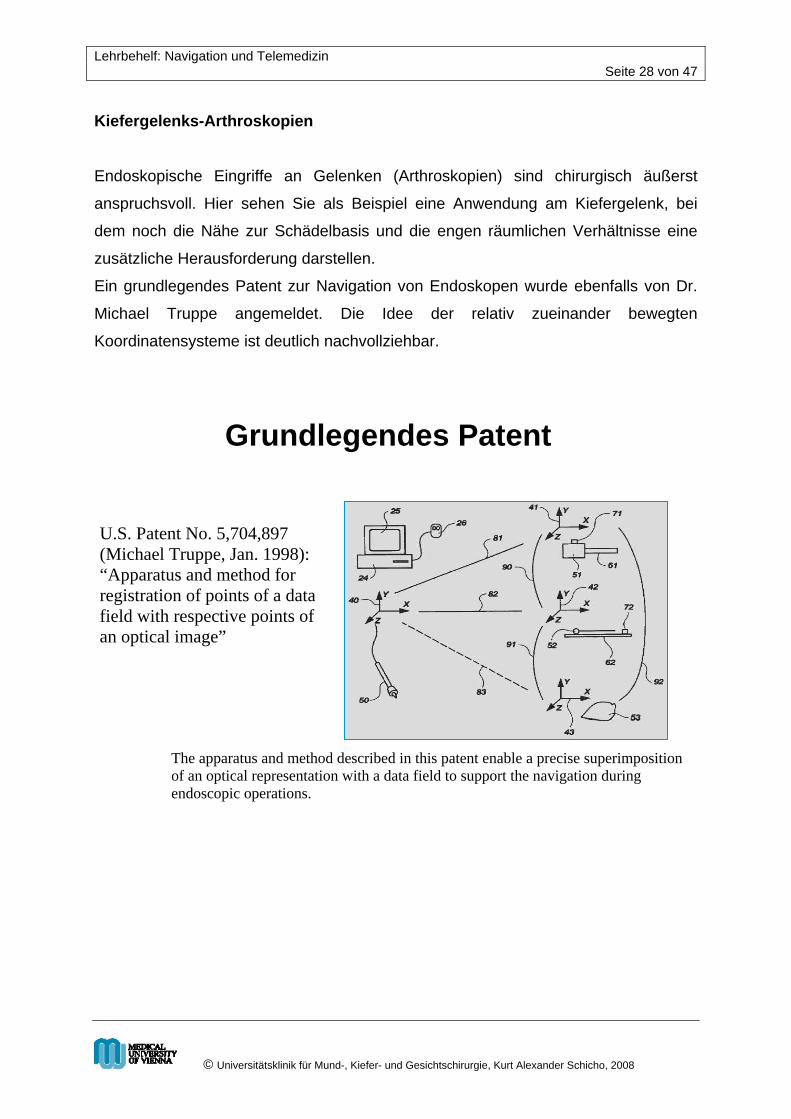
Kiefergelenks-Arthroskopien Endoskopische Eingriffe an Gelenken (Arthroskopien) sind chirurgisch äußerst
anspruchsvoll. Hier sehen Sie als Beispiel eine Anwendung am Kiefergelenk, bei
dem noch die Nähe zur Schädelbasis und die engen räumlichen Verhältnisse eine
zusätzliche Herausforderung darstellen.
Ein grundlegendes Patent zur Navigation von Endoskopen wurde ebenfalls von Dr.
Michael Truppe angemeldet. Die Idee der relativ zueinander bewegten
Koordinatensysteme ist deutlich nachvollziehbar.
Grundlegendes Patent
U.S. Patent No. 5,704,897 (Michael Truppe, Jan. 1998): “Apparatus and method for registration of points of a data field with respective points of an optical image”
The apparatus and method described in this patent enable a precise superimposition of an optical representation with a data field to support the navigation during endoscopic operations.
Lehrbehelf: Navigation und Telemedizin Seite 29 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
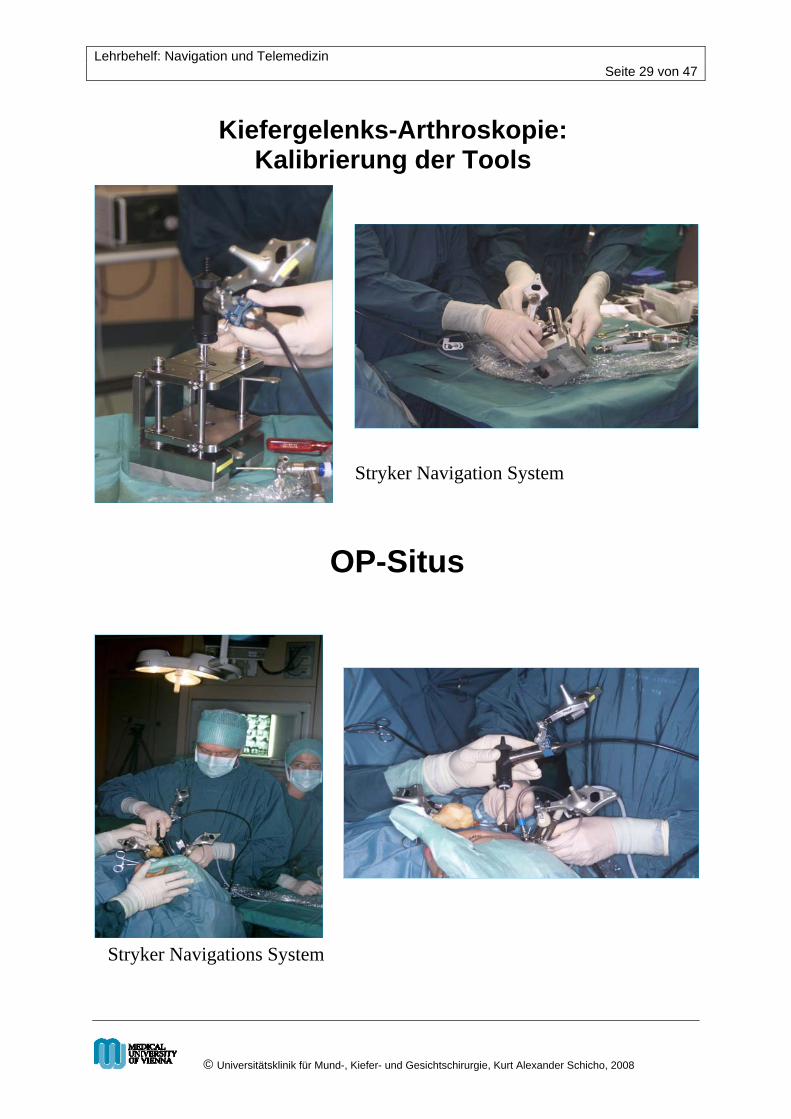
Kiefergelenks-Arthroskopie: Kalibrierung der Tools
Stryker Navigation System
OP-Situs
Stryker Navigations System
Lehrbehelf: Navigation und Telemedizin Seite 30 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
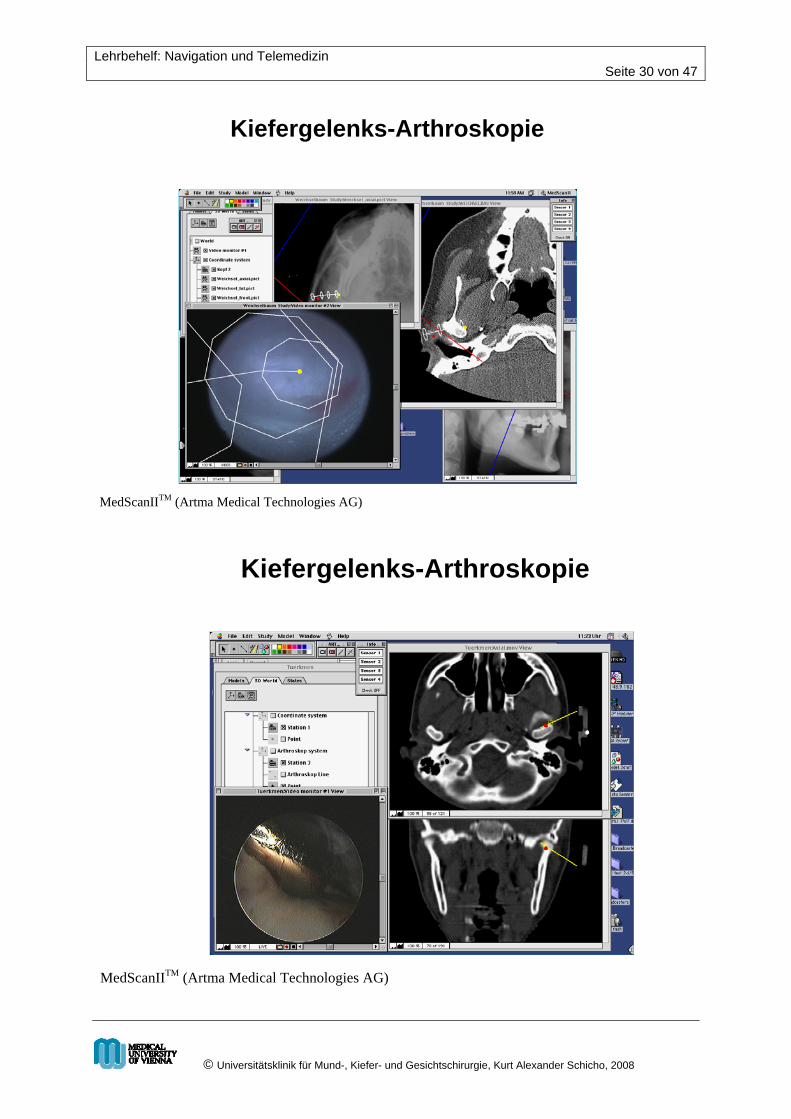
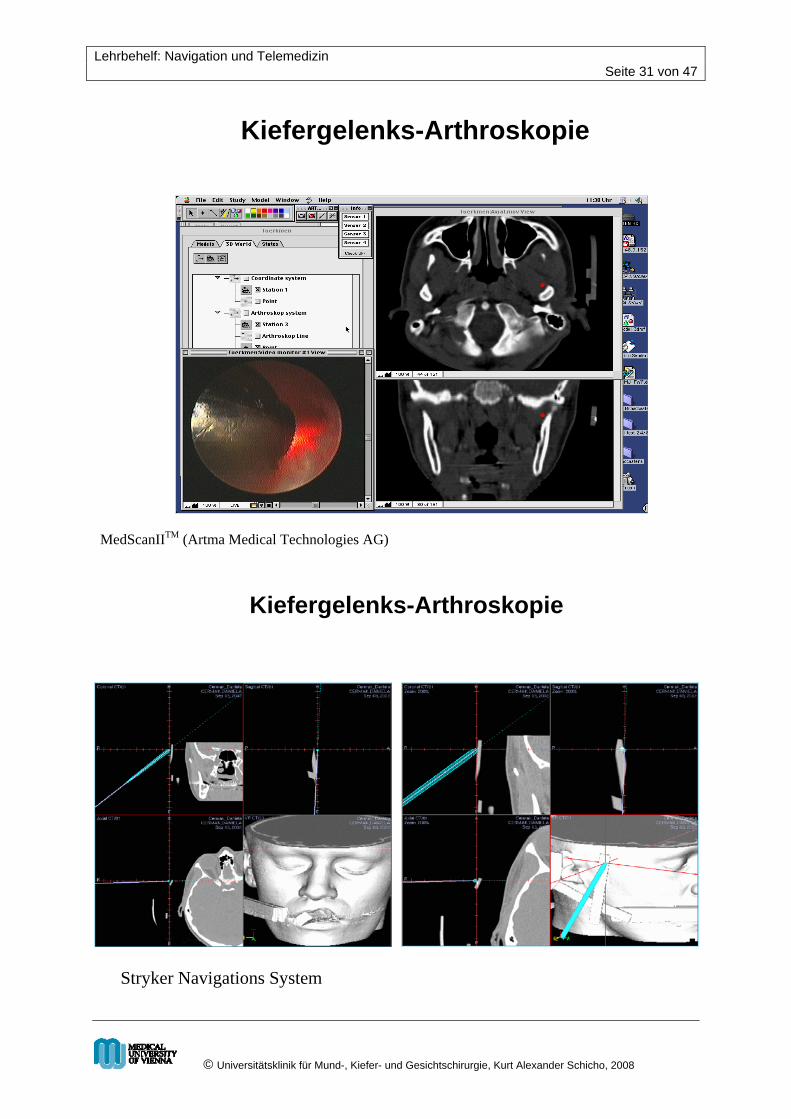
MedScanIITM (Artma Medical Technologies AG)
Kiefergelenks-Arthroskopie
MedScanIITM (Artma Medical Technologies AG)
Kiefergelenks-Arthroskopie
Lehrbehelf: Navigation und Telemedizin Seite 31 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
MedScanIITM (Artma Medical Technologies AG)
Kiefergelenks-Arthroskopie
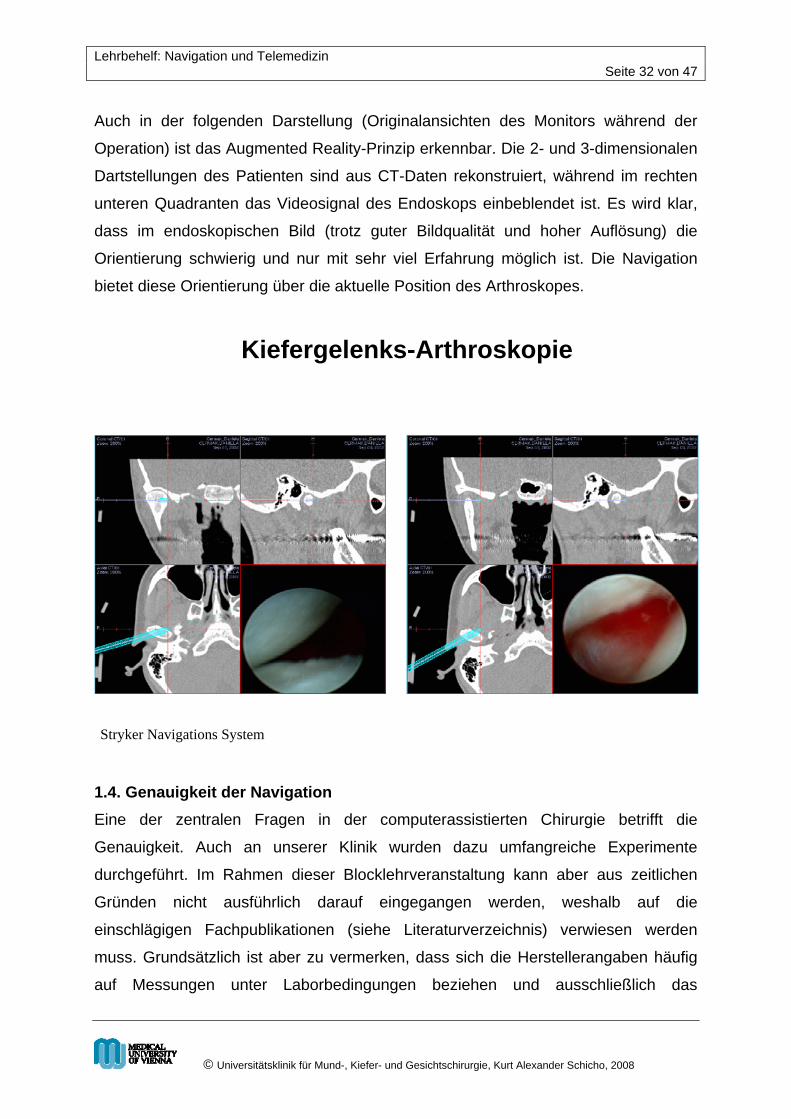
Stryker Navigations System
Kiefergelenks-Arthroskopie
Lehrbehelf: Navigation und Telemedizin Seite 32 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
Auch in der folgenden Darstellung (Originalansichten des Monitors während der
Operation) ist das Augmented Reality-Prinzip erkennbar. Die 2- und 3-dimensionalen
Dartstellungen des Patienten sind aus CT-Daten rekonstruiert, während im rechten
unteren Quadranten das Videosignal des Endoskops einbeblendet ist. Es wird klar,
dass im endoskopischen Bild (trotz guter Bildqualität und hoher Auflösung) die
Orientierung schwierig und nur mit sehr viel Erfahrung möglich ist. Die Navigation
bietet diese Orientierung über die aktuelle Position des Arthroskopes.
1.4. Genauigkeit der Navigation Eine der zentralen Fragen in der computerassistierten Chirurgie betrifft die
Genauigkeit. Auch an unserer Klinik wurden dazu umfangreiche Experimente
durchgeführt. Im Rahmen dieser Blocklehrveranstaltung kann aber aus zeitlichen
Gründen nicht ausführlich darauf eingegangen werden, weshalb auf die
einschlägigen Fachpublikationen (siehe Literaturverzeichnis) verwiesen werden
muss. Grundsätzlich ist aber zu vermerken, dass sich die Herstellerangaben häufig
auf Messungen unter Laborbedingungen beziehen und ausschließlich das
Stryker Navigations System
Kiefergelenks-Arthroskopie

Lehrbehelf: Navigation und Telemedizin Seite 33 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
Trackingsystem selbst berücksichtigen. Im intraoperativen Einsatz kann es jedoch zu
einer Kumulation von Ungenauigkeiten und Fehlerquellen kommen, die bereits beim
CT-Scan beginnt (z.B. unentdeckte Kopfbewegung des Patienten) und sich über
Ungenauigkeiten bei der Planung, die Registrierungsmethode bis hin zu potentiellen
Störfaktoren für das Trackingsystem, die aus den Bedingungen im OP resultieren,
erstreckt. Die tatsächlich erzielbaren Genauigkeiten sind also meist nicht unmittelbar
aus den technischen Spezifikationen des Trackingsystems erkennbar.
Gewissenhafte Genauigkeitskontrollen während der Operation und insbesondere die
Anwendung eines geeigneten Registrierungsverfahrens sind in jedem Fall von
unerlässlich. Die folgende Tabelle illustriert die Problematik: Herstellerangaben
lassen häufig keine klaren Rückschlüsse auf die intraoperativ zu erwartenden
Genauigkeiten zu.
System Angaben zur Genauigkeit(Herstellerangaben, wenn nicht anders angegeben)
PolarisTM
(NDI NorthernDigital Inc.)
0.35mm RMS (random mean squared error) bei einem einzelnenMarker auf der Basis von 1269 Meßpunkten innerhalb desArbeitsvolumens, für jeden Punkt 30 Messungen bei 20°C
OptotrakTM
(NDI NorthernDigital Inc.)
RMS accuracy to 0.1mm; resolution to 0.01mm
FlashPointTM
Model 5000(Image GuidedTechnologies Inc.)
Durchschnittlicher Fehler 0.23mm bei einer Standardabweichung von0.05mm
ARTtrack 1TM
(A.R.T. AdvancedRealtime TrackingGmbH)
Auflösung: 1/65.000 FoV horizontal1/50.000 FoV vertikalAbsolutgenauigkeit: x: 1/18.000 FoV (RMS)y: 1/10.000 FoV (RMS)FoV ... field of view
Lehrbehelf: Navigation und Telemedizin Seite 34 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
2. TELEMEDIZIN 2.1. Einführung Der rasante Fortschritt auf dem Gebiet der Informations- und
Telekommunikationstechnologie vor allem im vergangenen Jahrzehnt übt auf die
Medizin, ganz speziell auf die chirurgischen Fächer, einen entscheidenden Einfluss
aus. Bereits seit den ersten Tagen der allgemeinen Zugänglichkeit des damals
neuen Mediums Internet wird auch an der Universitätsklinik für Mund-, Kiefer- und
Gesichtschirurgie an der Medizinischen Universität Wien (Vorstand: Univ.Prof. DDr.
Rolf Ewers) diese Technologie genutzt, um bei verschiedensten komplexen
chirurgischen Eingriffen und Behandlungsabläufen mittels Telekonsultation hoch
spezialisiertes Expertenwissen global verfügbar zu machen. Aufbauend auf den
Erkenntnissen aus umfassender Grundlagenforschung konnten zahlreiche
Anwendungen inzwischen im klinischen Routineeinsatz etabliert werden. Das
Ergebnis ist ein wertvoller Beitrag zur Qualitätssicherung in der Behandlung bei
gleichzeitiger Steigerung der Kosteneffizienz. Auch in der medizinischen Aus- und
Weiterbildung eröffnet Telemedizin neue Perspektiven, weil eine unmittelbare
Einbindung etwa in Operationen unabhängig von der geographischen Entfernung
möglich wird.
Zu den wichtigsten Entwicklungen in der „High-Tech Medizin“ zählt die interaktive
Telekonsultation in Verbindung mit Navigation auf der Basis von „augmented reality
environments“. Dabei beschränkt man sich nicht auf das bloße Übertragen von
Videosignalen, um bei Operationen zuzusehen, sondern man ermöglicht den über
Telekonsultation eingebundenen Kollegen eine direkte Einflussnahme auf das
Geschehen. Dieser Zugang wird erst durch die Kombination von Telekommunikation
mit intraoperativer Navigation möglich, wie sie zuvor in dieser Vorlesung vorgestellt
wurde.
Eine allgemeine Definition von „Telemedizin“ könnte lauten: Telemedizin ist jede
Übermittlung medizinischer Information mittels Telekommunikationstechnologie.
Daher ist es wenig überraschend, dass die Entwicklung der Telemedizin
weitestgehend parallel zu den technischen Fortschritten in der Telekommunikation

Lehrbehelf: Navigation und Telemedizin Seite 35 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
und dementsprechend rasch verläuft. In der Praxis sind derzeit unter anderem
folgende Bereiche der Telemedizin bedeutend:
2.2. Interaktive Telekonsultation
Während man unter Telemedizin vielfach lediglich die Übertragung von Bild- oder
Videodaten versteht, gibt es auch die Möglichkeit, auf einen Navigationscomputer im
Operationssaal von auswärts zuzugreifen (remote control). In diesem Fall spricht
man von interaktiver Telekonsultation. Das folgende Schema illustriert die technische
Realisierung:
Teleophthalmolog.
Teleneurorehab.
Telepathologie
etc. … Teledermatologie
Teleradiologie
TELEMEDIZIN
In vielen Fällen verwendet Telemedizin herkömmliche Telekommunikationsinfrastruktur zur Übermittlung medizinischer Inhalte (“statische” Bilder und/oder live-Videokonferenzen)
Lehrbehelf: Navigation und Telemedizin Seite 36 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
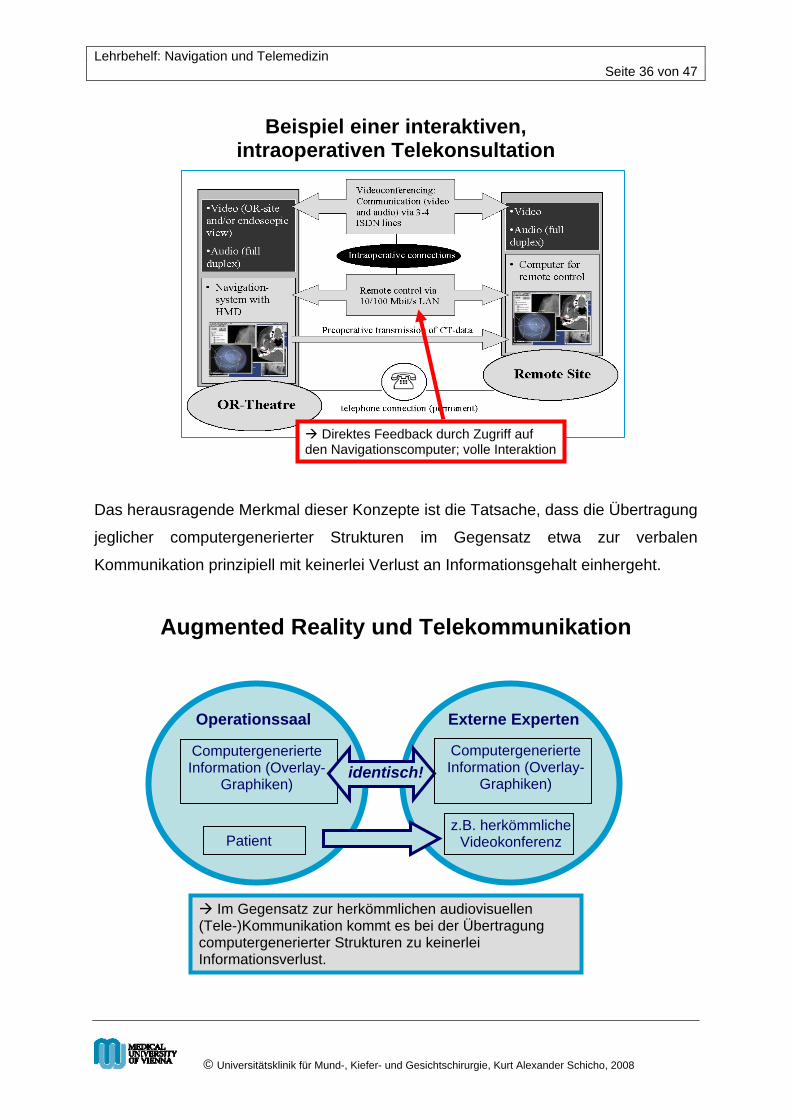
Das herausragende Merkmal dieser Konzepte ist die Tatsache, dass die Übertragung
jeglicher computergenerierter Strukturen im Gegensatz etwa zur verbalen
Kommunikation prinzipiell mit keinerlei Verlust an Informationsgehalt einhergeht.
Beispiel einer interaktiven, intraoperativen Telekonsultation
Direktes Feedback durch Zugriff auf den Navigationscomputer; volle Interaktion
Augmented Reality und Telekommunikation
Operationssaal
Patient
Computergenerierte Information (Overlay-
Graphiken)
z.B. herkömmliche Videokonferenz
identisch!
Externe Experten
Im Gegensatz zur herkömmlichen audiovisuellen (Tele-)Kommunikation kommt es bei der Übertragung computergenerierter Strukturen zu keinerlei Informationsverlust.
Computergenerierte Information (Overlay-
Graphiken)

Lehrbehelf: Navigation und Telemedizin Seite 37 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
Diese Idee ermöglicht nicht nur die intraoperative Telekonsultation. In gewissen
Fällen, etwa der navigationsunterstützten dentalen Implantologie, ist eher die
Telekonsultation in der präoperativen Planungsphase sinnvoll, weil dabei das
spezielle Expertenwissen nötig ist (während die reine Insertion der Implantate nach
Abschluss der Planung in der Regel für den Zahnarzt kein Problem darstellt).
Die in der Telemedizin eingesetzten Technologien können auch in der medizinischen
Aus- und Weiterbildung wertvolle Dienste leisten, da den Studierenden immer wieder
neue, „echte“ Fälle zugänglich gemacht werden. Praxisnahes Lernen wird
unabhängig vom geographischen Aufenthaltsort der Studierenden möglich. Eine
Grundvoraussetzung sind (wie überall im IT-Bereich) ausreichende Bandbreiten für
die Übertragung. Die verfügbaren Bandbreiten können daher heute generell als
wesentlicher Standortfaktor betrachtet werden.
Telekonsultation in der navigations-unterstützten Dental-Implantologie
• Hochspezialisiertes Wissen wird ortsunabhängig zugänglich gemacht
Einfache Übertragung einer Datei mit Planungsdaten z.B. per e-mail

Lehrbehelf: Navigation und Telemedizin Seite 38 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
2.3. Der Telenavigations-Client
Eine neue Entwicklung auf dem Gebiet der Augmented Reality in Verbindung mit
Navigation ist der Telenavigations-Client vom Karl Landsteiner Institut für
Biotelematik (Dr. Michael Truppe). Die zentrale Idee dahinter ist es, den Datenstrom
aus dem Trackingsystem separat z.B. über das Internet zu übertragen. Die Zuseher
(z.B. Studierende oder Ärzte) laden bereits vorher das Datenmaterial der
bildgebenden Modalitäten (in der Regel CT und/oder MR), um während der
Operation keinen Videostream, sondern lediglich den Datenfluss aus dem
Trackingsystem zu empfangen. Mittels spezieller Software, die im Prinzip ein
vollständiges Navigationsprogramm ist, findet nun jeder Zuseher auf dem Remote-
Computer eine identische Situation wie am Operationscomputer vor. Allerdings
beschränkt sich diese Anwendung nicht auf das reine Zusehen, sondern ermöglicht
beliebige Modifikationen der Darstellungen (z.B. Schnitte, Ansichten, …), ohne den
Operationsverlauf zu stören.
IP-basiertes Videokonferenzsystem (Tandberg) Kostengünstigerer Betrieb als bei ISDN-basierten
Übertragungen
“Teleeduction”: Live-Übertragung von Operationen

Lehrbehelf: Navigation und Telemedizin Seite 39 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
“Teleeducation” – Spezieller Telenavigationsclient für intraoperative Navigation
• Intraoperative Navigation mit interaktiver Beteilgung externen Zuseher in Echtzeit
• Entwickelt vom Karl Landsteiner Institut für Biotelematik (Dr. Michael Truppe)
Telenavigations-Client
Karl Landsteiner Institut für Biotelematik, Wien
Die Daten aus dem Trackingsystem (Positionserfassung) werden über das Internet zu anderen Computern gestreamt, die als Client fungieren
Lehrbehelf: Navigation und Telemedizin Seite 40 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
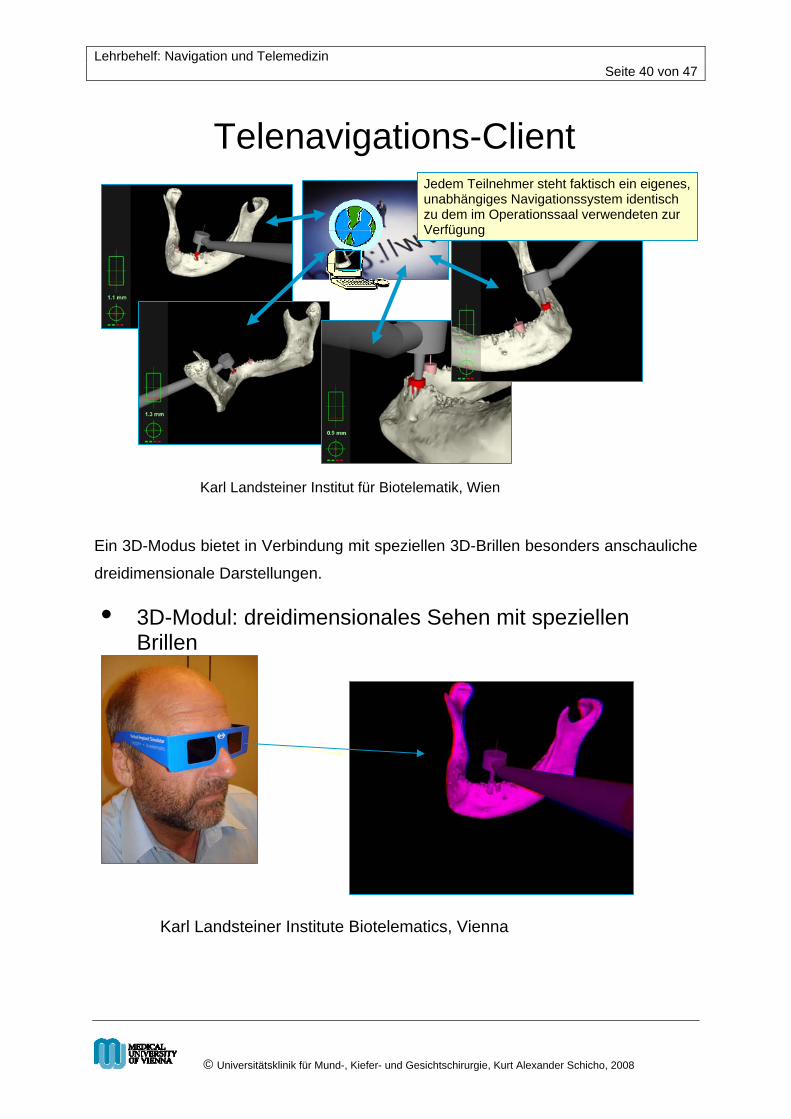
Ein 3D-Modus bietet in Verbindung mit speziellen 3D-Brillen besonders anschauliche
dreidimensionale Darstellungen.
Telenavigations-Client
Karl Landsteiner Institut für Biotelematik, Wien
Jedem Teilnehmer steht faktisch ein eigenes, unabhängiges Navigationssystem identisch zu dem im Operationssaal verwendeten zur Verfügung
Karl Landsteiner Institute Biotelematics, Vienna
• 3D-Modul: dreidimensionales Sehen mit speziellen Brillen
Lehrbehelf: Navigation und Telemedizin Seite 41 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
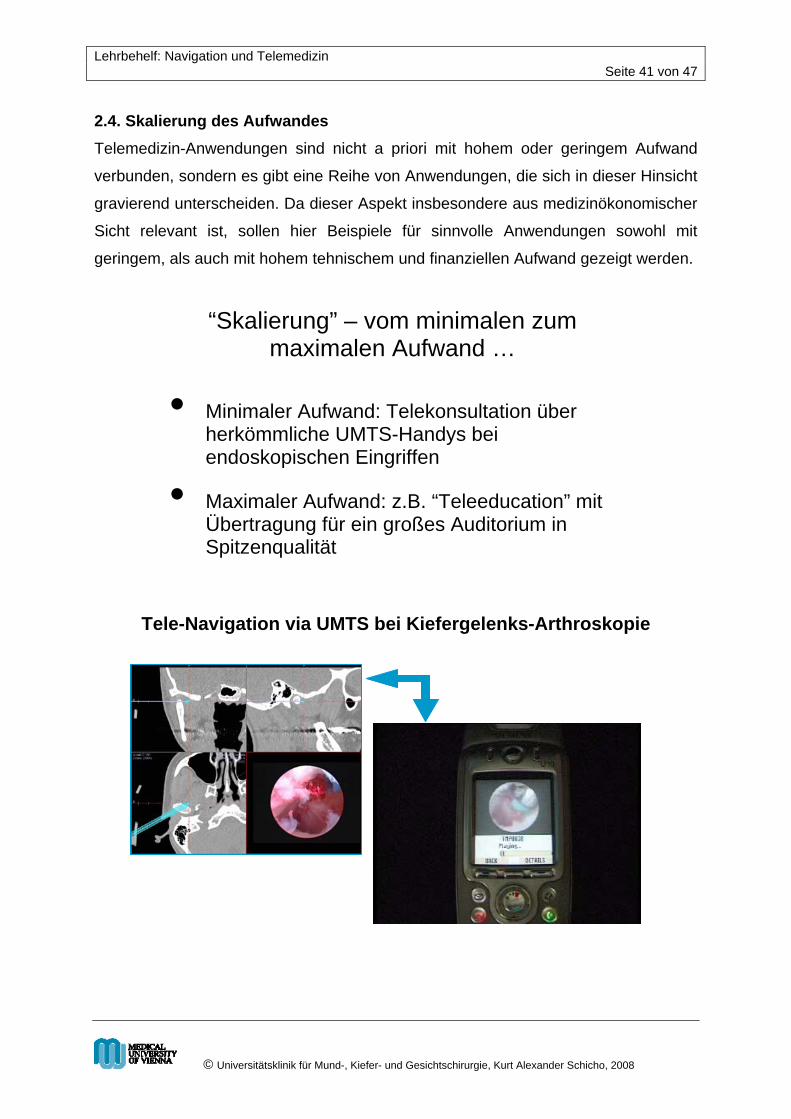
2.4. Skalierung des Aufwandes Telemedizin-Anwendungen sind nicht a priori mit hohem oder geringem Aufwand
verbunden, sondern es gibt eine Reihe von Anwendungen, die sich in dieser Hinsicht
gravierend unterscheiden. Da dieser Aspekt insbesondere aus medizinökonomischer
Sicht relevant ist, sollen hier Beispiele für sinnvolle Anwendungen sowohl mit
geringem, als auch mit hohem tehnischem und finanziellen Aufwand gezeigt werden.
“Skalierung” – vom minimalen zum maximalen Aufwand …
• Minimaler Aufwand: Telekonsultation über herkömmliche UMTS-Handys bei endoskopischen Eingriffen
• Maximaler Aufwand: z.B. “Teleeducation” mit Übertragung für ein großes Auditorium in Spitzenqualität
Tele-Navigation via UMTS bei Kiefergelenks-Arthroskopie
Lehrbehelf: Navigation und Telemedizin Seite 42 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
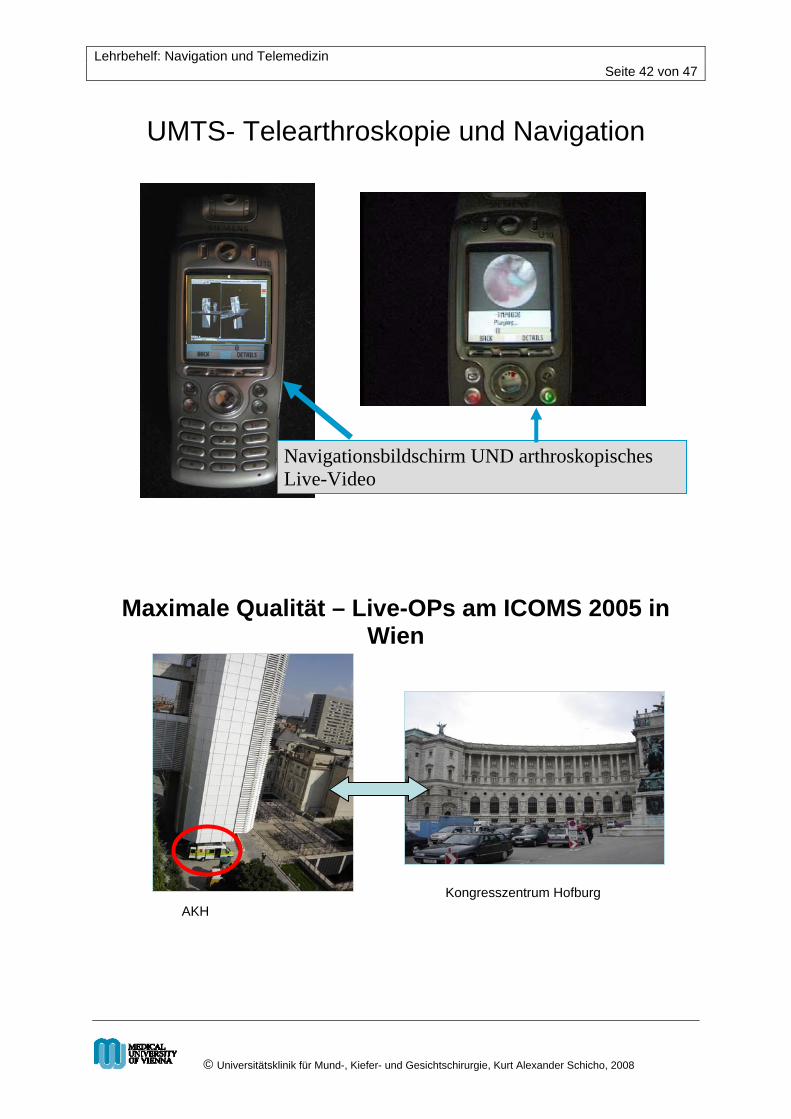
UMTS- Telearthroskopie und Navigation
Navigationsbildschirm UND arthroskopisches Live-Video
Maximale Qualität – Live-OPs am ICOMS 2005 in Wien
AKH Kongresszentrum Hofburg

Lehrbehelf: Navigation und Telemedizin Seite 43 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
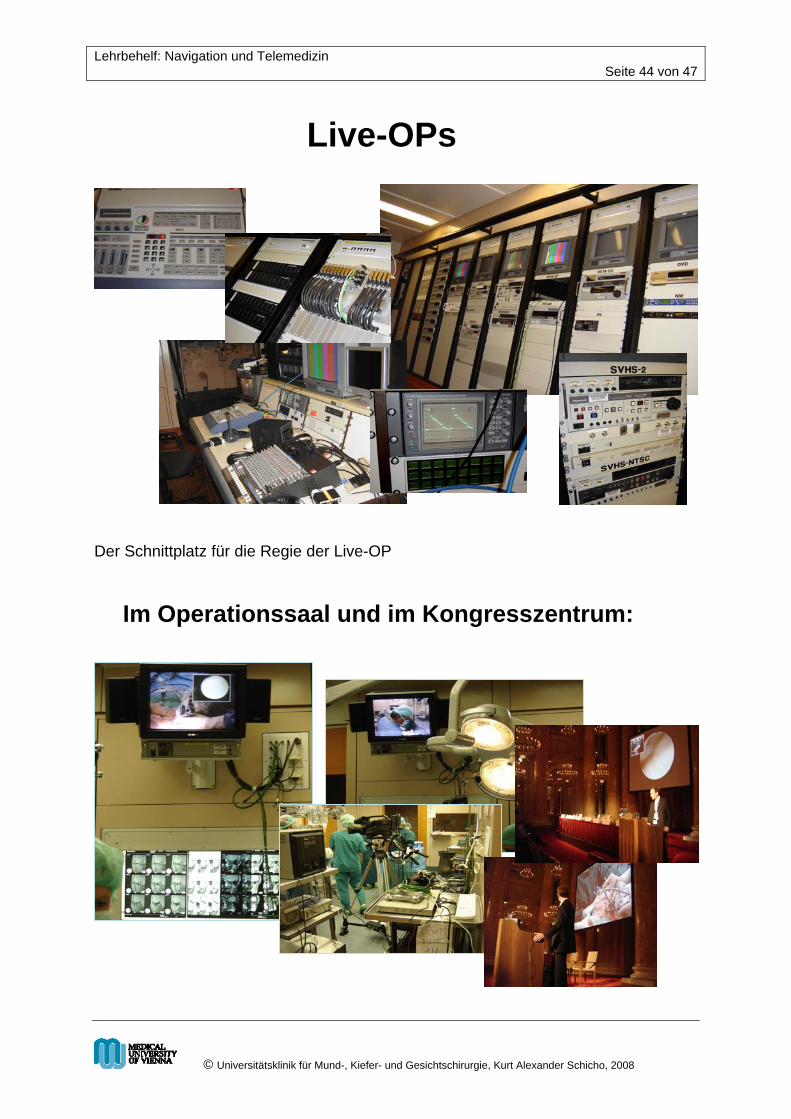
Im Übertragungswagen, der sonst für TV-Sendungen verwendet wird …
Live-OPs
Hofburg AKH Wien
Lehrbehelf: Navigation und Telemedizin Seite 44 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
Der Schnittplatz für die Regie der Live-OP
Live-OPs
Im Operationssaal und im Kongresszentrum:
Lehrbehelf: Navigation und Telemedizin Seite 45 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
3. Literatur
• Ewers R, Schicho K, Wanschitz F, Truppe M, Seemann R, Wagner A. Basic research and 12 years of clinical experience in computer assisted navigation technology: A review; International Journal of Oral & Maxillofacial Surgery 2005; 34(1), 1-8.
• Ewers R, Schicho K, Undt G, Seemann R, Truppe M, Wagner A. Seven years of clinical
experience with teleconsultation in craniomaxillofacial surgery. Journal of Oral and Maxillofacial Surgery, 2005 Mar;63(10):1447-1454.
• Ewers R, Schicho K, Seemann R, Reichwein A, Figl M, Wagner A. Computer aided
navigation in dental implantology: 7 years of clinical experience. J Oral Maxillofac Surg. 2004 Mar;62(3):329-34.
• Schicho K, Figl M, Seemann R, Donat M, Pretterklieber ML, Birkfellner W, Reichwein
A, Wanschitz F, Kainberger F, Bergmann H, Wagner A, Ewers R. Laser surface scanning versus fiducial-based patient registration in frameless stereotaxy. Journal of Neurosurgery accepted for publication – to appear April 2007
• Schicho K, Figl M, Seemann R, Ewers R, Lambrecht JT, Wagner A, Watzinger F,
Baumann A, Kainberger F, Fruehwald J, Klug C. Accuracy of treatment planning based on stereolithography in computer assisted surgery. Medical Physics 2006, 33(9):3408-3417.
• Schicho K, Kastner J, Klingesberger R, Seemann R, Enislidis G, Undt G, Wanschitz F,
Figl M, Wagner A, Ewers R. Surface area analysis of dental implants using micro-CT. Clinical Oral Implants Research, accepted for publication
• Schicho K, Figl M, Donat M, Birkfellner W, Seemann R, Wagner A, Bergmann H, Ewers
R. Stability of miniature electromagnetic tracking systems. Physics in Medicine and Biology (2005) May 7;50(9):2089-98. Epub 2005 Apr 20.
• Wagner A, Wanschitz F, Birkfellner W, Zauza K, Watzinger F, Schicho K, Kainberger F,
Czerny C, Bergmann H, Ewers R. Computer-Aided Placement of Endosseous Oral Implants in Patients after Ablative Tumor Surgery: Assessment of Accuracy. Clin Oral Implants Res. 2003 Jun;14(3):340-8.
• Wagner A, Schicho K, Kainberger F, Birkfellner W, Glaser C, Grampp S, Ewers R.
Quantification and Clinical Relevance of Head Motion During Computed Tomography. Invest Radiol. 2003;38(11):733-741.
• Wagner A, Schicho K, Birkfellner W, Figl M, Seemann R, König F, Ewers R.
Quantitative Analysis of Factors Affecting Intraoperative Precision and Stability of Optoelectronic and Electromagnetic Tracking-Systems. Medical Physics 2002 May;29(5):905-12.
• Wanschitz F, Birkfellner W, Figl M, Patruta S, Wagner A, Watzinger F, Yerit K, Schicho
K, Hanel R, Kainberger F, Imhof H, Bergmann H, Ewers R. Computer-enhanced
Lehrbehelf: Navigation und Telemedizin Seite 46 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
stereoscopic vision in a head-mounted display for oral implant surgery. Clin Oral Implants Res. 2002 Dec;13(6):610-6.
• Seemann , Czerny C, Schicho K, Undt G, Piehslinger E, Ewers R, Wagner A.
Pseudodynamic MRI differs from natural opening of the temporomandibular joint. Oral Surg Oral Med Oral Pathol Oral Radiol Endod Accepted for publication
• C. Klug, K. Schicho, O. Ploder, K. Yerit, F. Watzinger, R. Ewers, A. Wagner. Point-to-
point computer-assisted navigation for precise transfer of planned zygoma osteotomies from the sterolithographic model into reality. J. Oral Maxillofac. Surg., 64, 550-559 (2006).
• Wagner A, Seemann R, Schicho K, Ewers R, Piehslinger E. A comparative analysis of
optical and conventional axiography for the analysis of temporomandibular joint movements. J Prosthet Dent. 2003 Nov;90(5):503-9.
• Wagner A, Undt G, Schicho K, Wanschitz F, Watzinger F, Murakami K, Czerny C, Ewers
R. Interactive stereotaxic teleassistance of remote experts during arthroscopic procedures. Arthroscopy 2002;18(9):1034-9.
• Wagner A, Undt G, Watzinger F, Wanschitz F, Schicho K, Yerit K, Kermer C, Birkfellner
W, Ewers R. Principles of computer-assisted arthroscopy of the temporomandibular joint with optoelectronic tracking technology. Oral Surg Oral Med Oral Pathol Oral Radiol Endod 2001 Jul;92(1):30-7.
• Baumann A, Schicho K, Klug C, Wagner A, Ewers R. Computer-assisted navigational
surgery in oral and maxillofacial surgery. Atlas Oral Maxillofac Surg Clin North Am. 2005 Mar;13(1):41-9.
• Watzinger F, Wanschitz F, Rasse M, Millesi W, Schopper C, Kremser J, Birkfellner W,
Sinko K, Ewers R. Computer-aided surgery in distraction osteogenesis of the maxilla and mandible. Int J Oral Maxillofac Surg 28:171-175, 1999.
• Watzinger F, Wanschitz F, Wagner A, Enislidis G, Millesi W, Baumann A, Ewers R.
Computer-aided navigation in secondary reconstruction of post-traumatic deformities of the zygoma. J Craniomaxillofac Surg 25:198-202, 1997.
• Enislidis G, Wagner A, Ploder O, Ewers R. Computed intraoperative navigation guidance-
a preliminary report on a new technique. Br J Oral Maxillofac Surg 1997:35: 271-274. • Wagner A, Ploder O, Enislidis G, Truppe M, Ewers R. Image-guided surgery. Int J Oral
Maxillofac Surg 1996:25: 147-151. • Wagner A, Ploder O, Enislidis G, Truppe M, Ewers R. Virtual image guided navigation in
tumor surgery – technical innovation. J Craniomaxillofac Surg 1995:23: 271-273.
Lehrbehelf: Navigation und Telemedizin Seite 47 von 47
© Universitätsklinik für Mund-, Kiefer- und Gesichtschirurgie, Kurt Alexander Schicho, 2008
• Wagner A, Rasse M, Millesi W, Ewers R. Virtual reality for orthognathic surgery: the augmented reality environment concept. J Oral Maxillofac Surg 1997:55: 456-462; discussion 462-463.
• Watzinger F, Birkfellner W, Wanschitz F, Ziya F, Wagner A, Kremser J, Kainberger F,
Huber K, Bergmann H, Ewers R. Placement of Endosteal Implants in the Zygoma after Maxillectomy: A Cadaver Study Using Surgical Navigation. Plast Reconstr Surg 2001:107: 659-667.
• Wagner A, Millesi W, Watzinger F, Truppe M, Rasse M, Enislidis G, Kermer C, Ewers R.
Clinical experience with interactive teleconsultation and teleassistance in craniomaxillofacial surgical procedures. J Oral Maxillofac Surg 1999:57: 1413-1418.
• Ploder O, Wagner A, Enislidis G, Ewers R. Computer-assisted intraoperative visualization
of dental implants. Augmented reality in medicine. Radiologe 1995:35: 569-572. • Wanschitz F, Birkfellner W, Watzinger F, Schopper C, Patruta S, Kainberger F, Figl M,
Kettenbach J, Bergmann H, Ewers R. Evaluation of accuracy of computer-aided intraoperative positioning of endosseous oral implants in the edentulous mandible. Clin Oral Implants Res 2002:13: 59-64.
• Watzinger F, Birkfellner W, Wanschitz F, Millesi W, Schopper C, Sinko K, Huber K,
Bergmann H, Ewers R. Positioning of dental implants using computer-aided navigation and an optical tracking system: case report and presentation of a new method. J Craniomaxillofac Surg 1999:27: 77-81.


















