Computer Vision Geometric Camera Models and Camera Calibration.
29
Computer Vision Geometric Camera Models and Camera Calibration
-
Upload
griffin-boone -
Category
Documents
-
view
238 -
download
1
Transcript of Computer Vision Geometric Camera Models and Camera Calibration.
Computer Vision
Geometric Camera Models and
Camera Calibration
Bahadir K. Gunturk 2
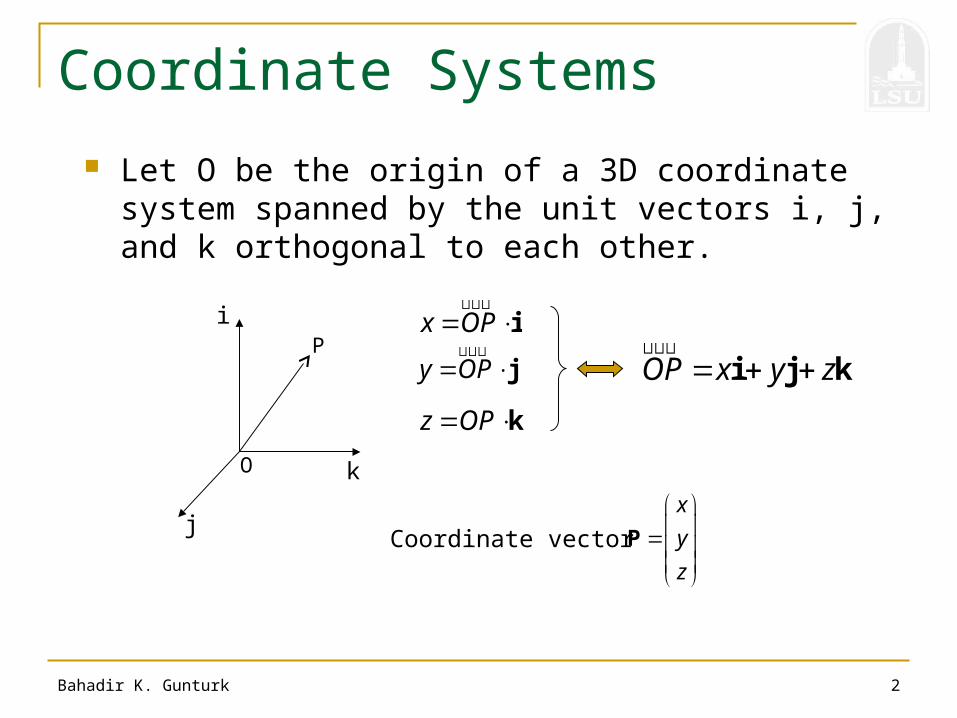
Coordinate Systems
Let O be the origin of a 3D coordinate system spanned by the unit vectors i, j, and k orthogonal to each other.
i
j
kO
Px OP i
��������������
y OP j��������������
z OP k��������������
OP x y z i j k��������������
x
y
z
PCoordinate vector
Bahadir K. Gunturk 3
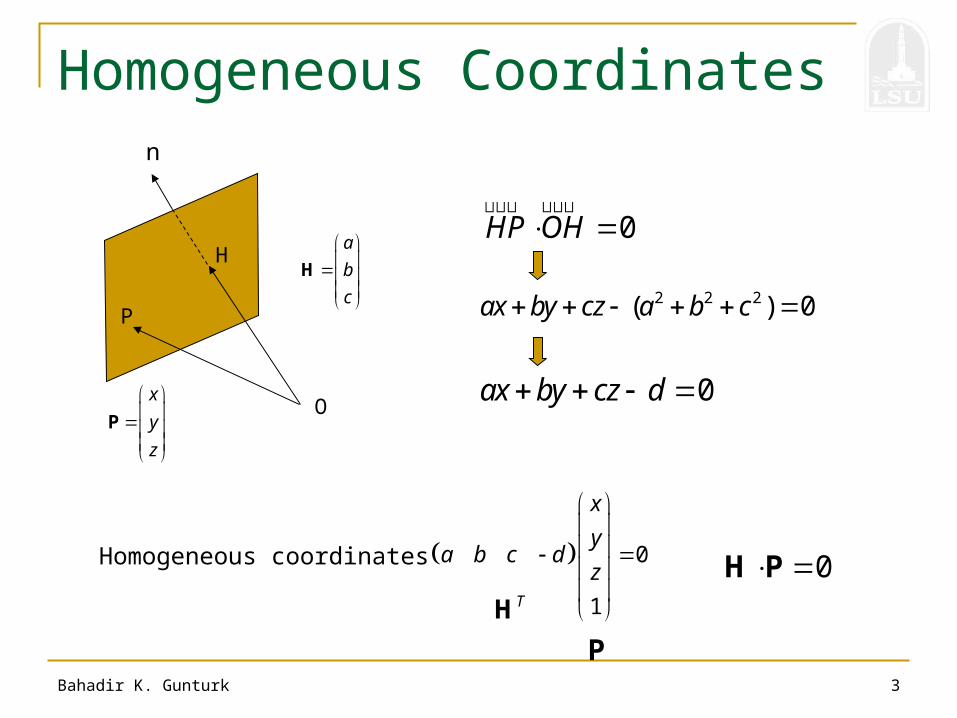
Homogeneous Coordinatesn
a
b
c
HH
O
P
x
y
z
P
0HP OH ����������������������������
2 2 2( ) 0ax by cz a b c
0ax by cz d
0
1
x
ya b c d
z
Homogeneous coordinates 0 H P
P
TH
Bahadir K. Gunturk 4
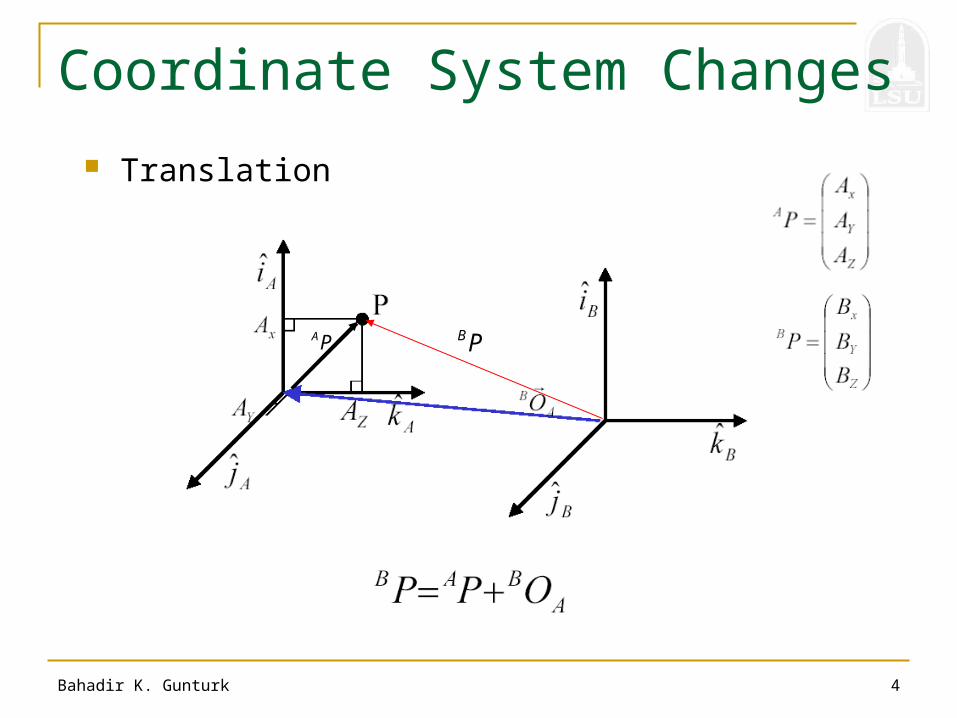
Coordinate System Changes
Translation
BPAP
Bahadir K. Gunturk 5
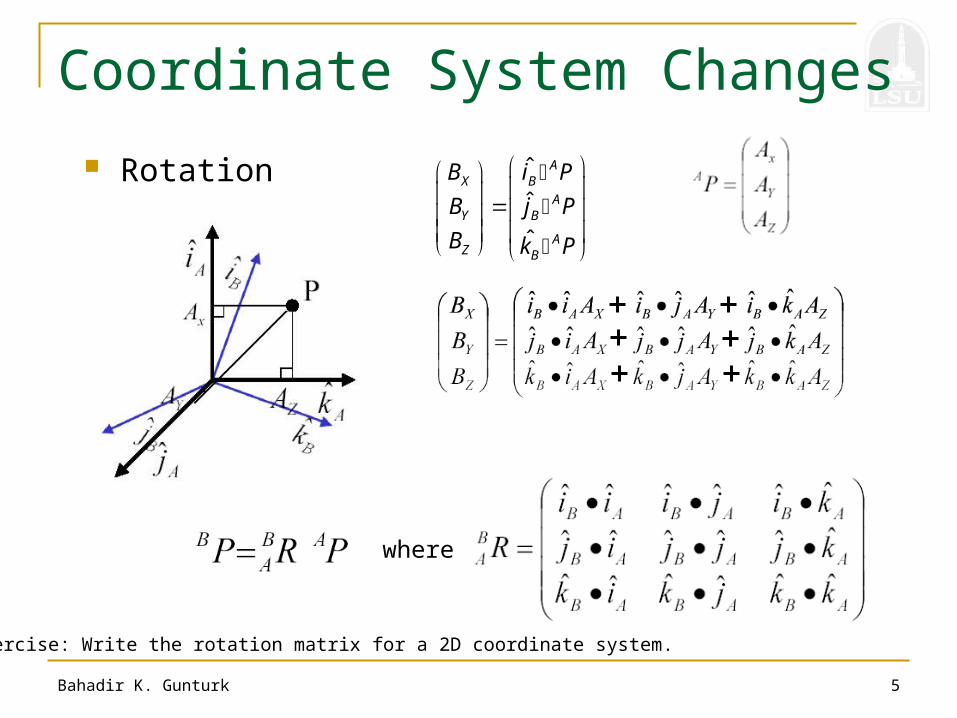
Coordinate System Changes
Rotation
where
Exercise: Write the rotation matrix for a 2D coordinate system.
ˆ
ˆ
ˆ
AX B
AY B
AZ B
B i P
B j P
B k P
Bahadir K. Gunturk 6
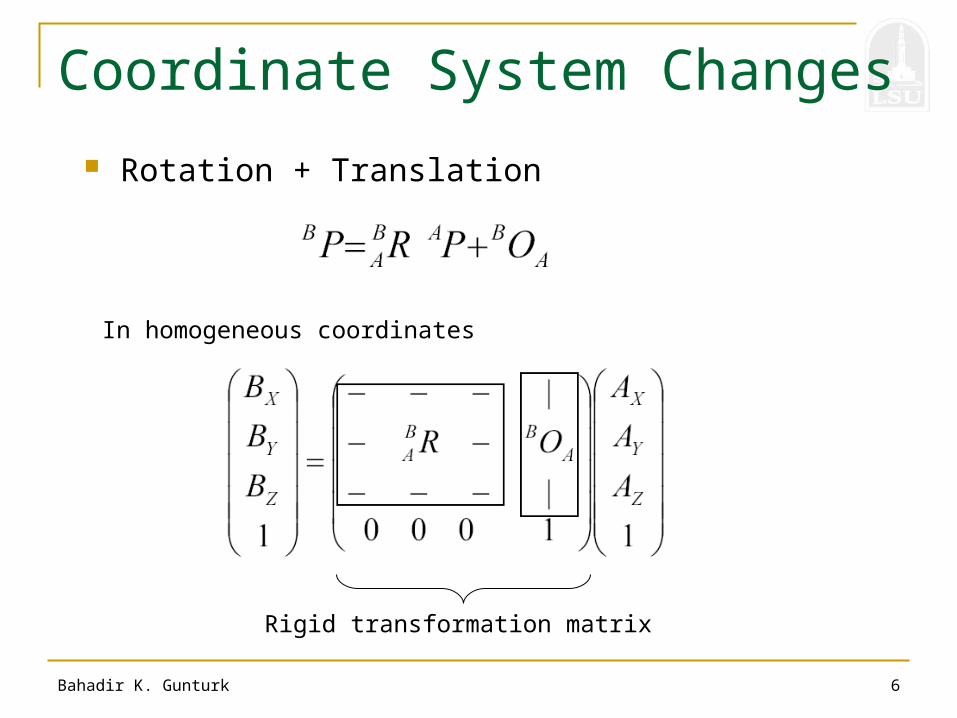
Coordinate System Changes
Rotation + Translation
In homogeneous coordinates
Rigid transformation matrix
Bahadir K. Gunturk 7
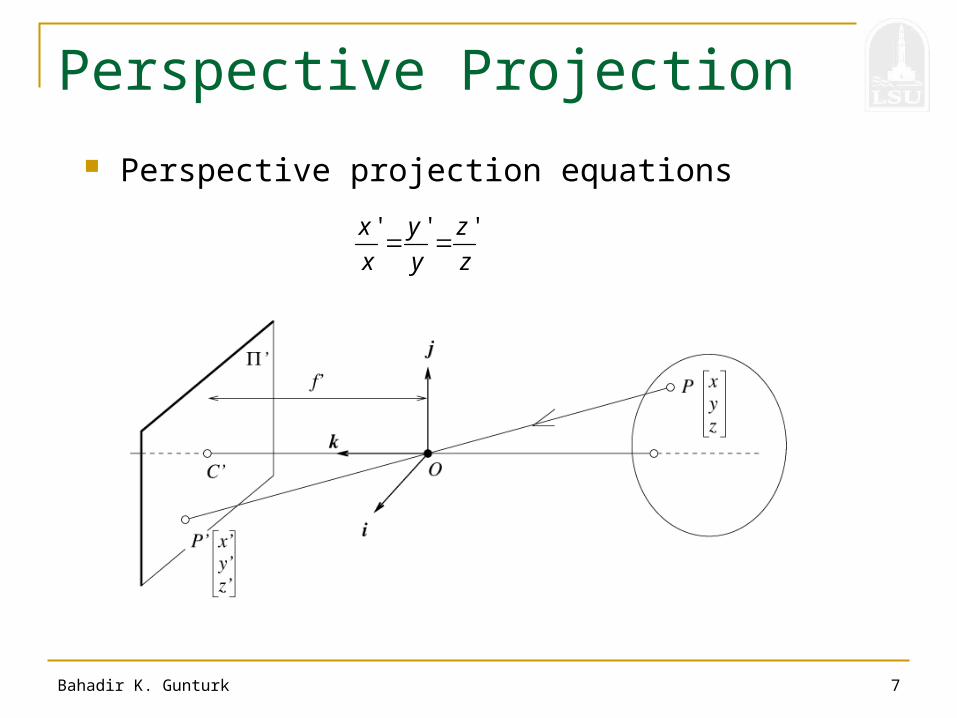
Perspective Projection
Perspective projection equations
' ' 'x y z
x y z
Bahadir K. Gunturk 8
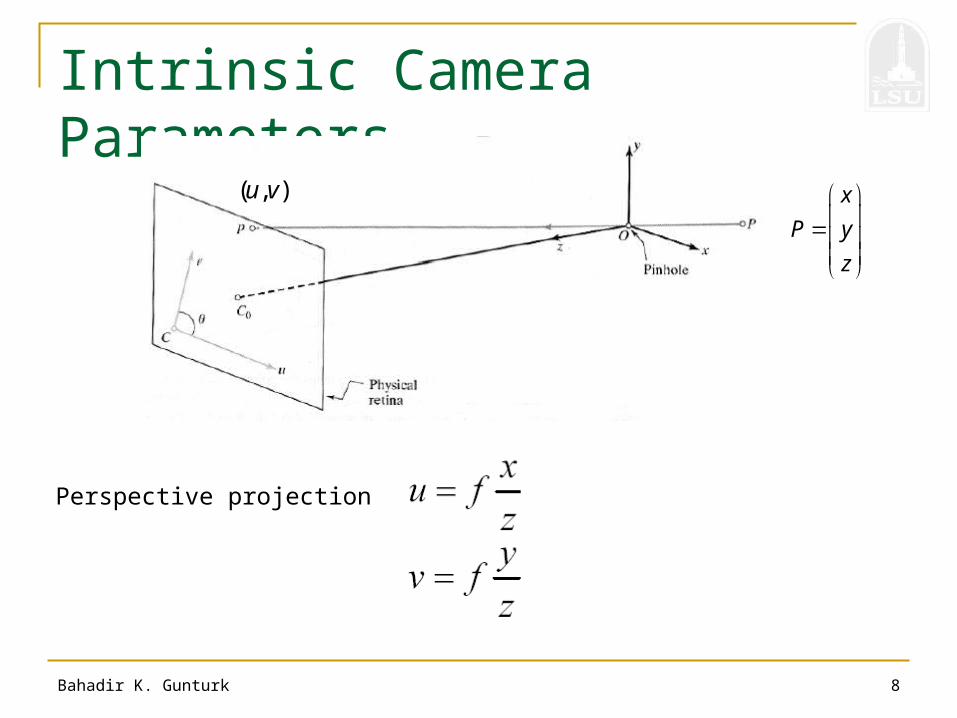
Intrinsic Camera Parameters
Perspective projection
( , )u v x
P y
z
Bahadir K. Gunturk 9
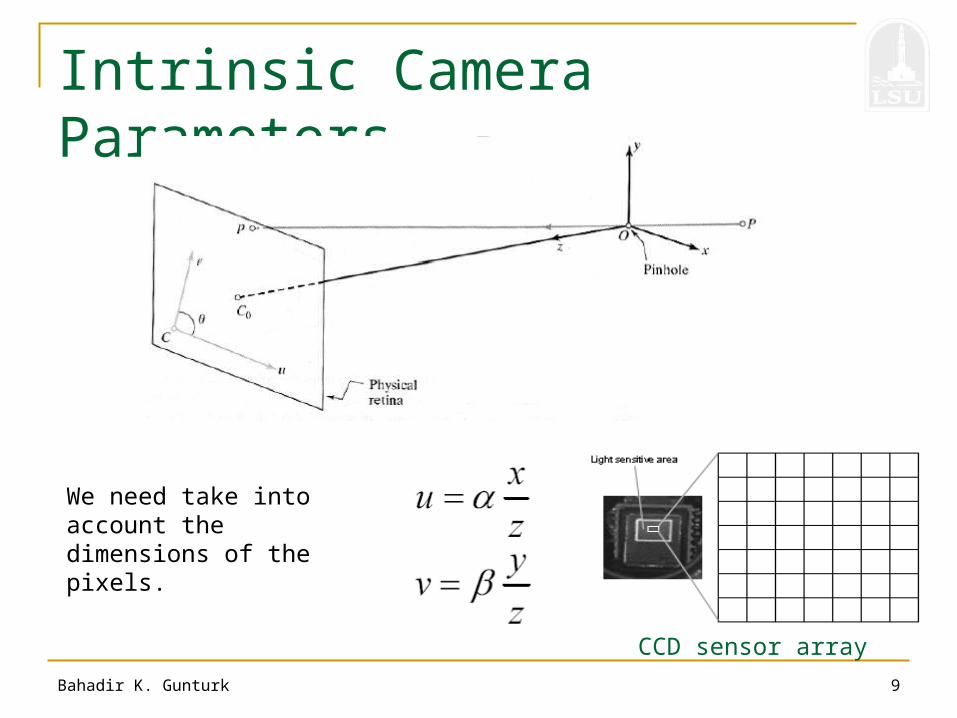
Intrinsic Camera Parameters
We need take into account the dimensions of the pixels.
CCD sensor array
Bahadir K. Gunturk 10
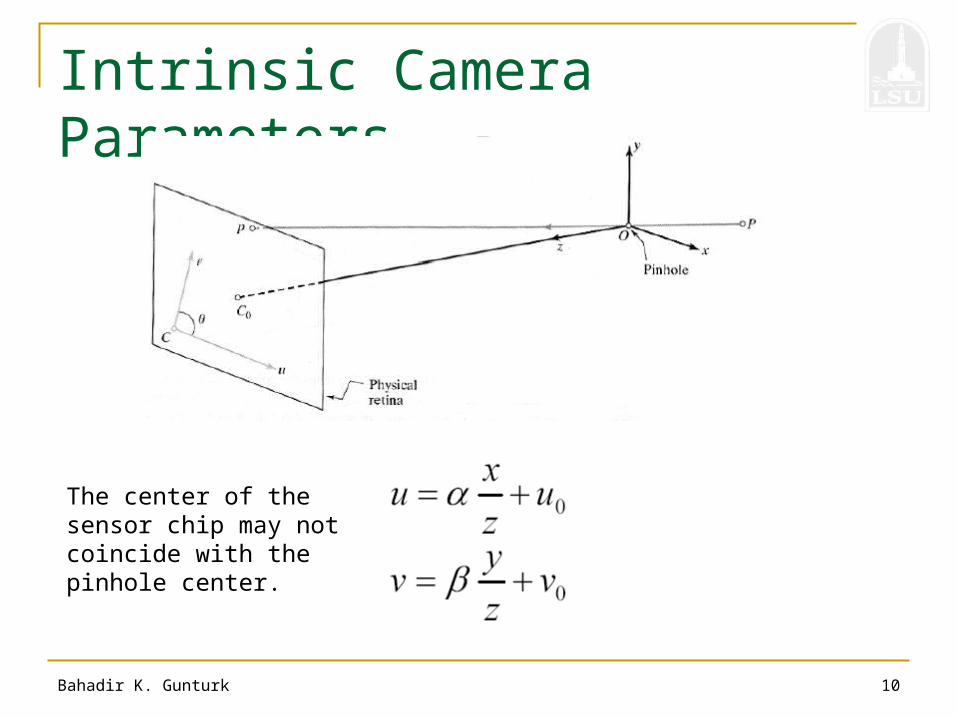
Intrinsic Camera Parameters
The center of the sensor chip may not coincide with the pinhole center.
Bahadir K. Gunturk 11
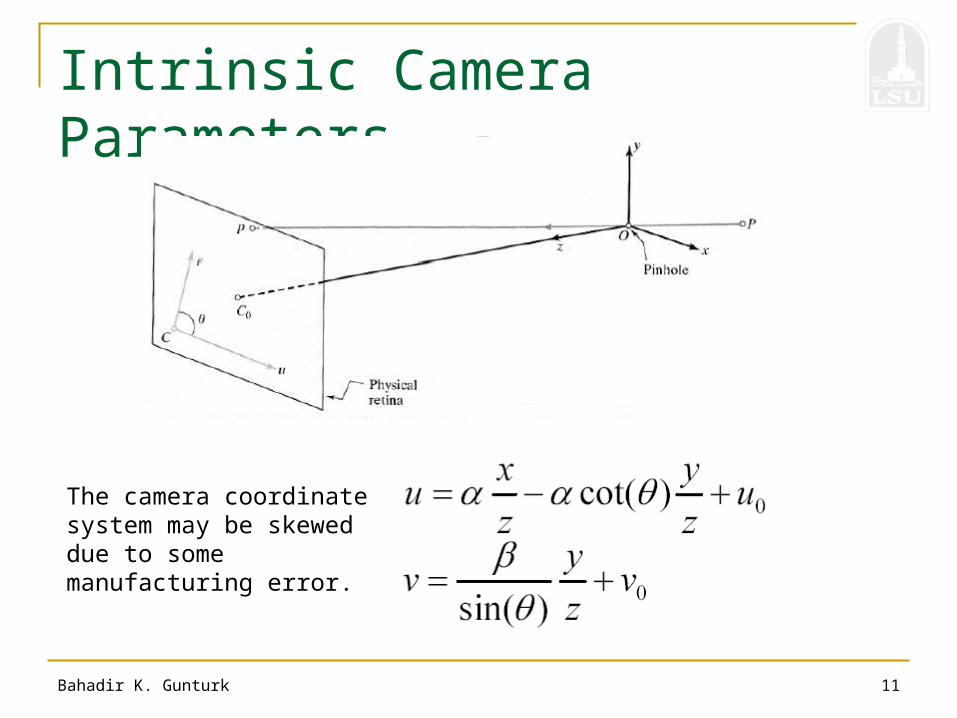
Intrinsic Camera Parameters
The camera coordinate system may be skewed due to some manufacturing error.
Bahadir K. Gunturk 12
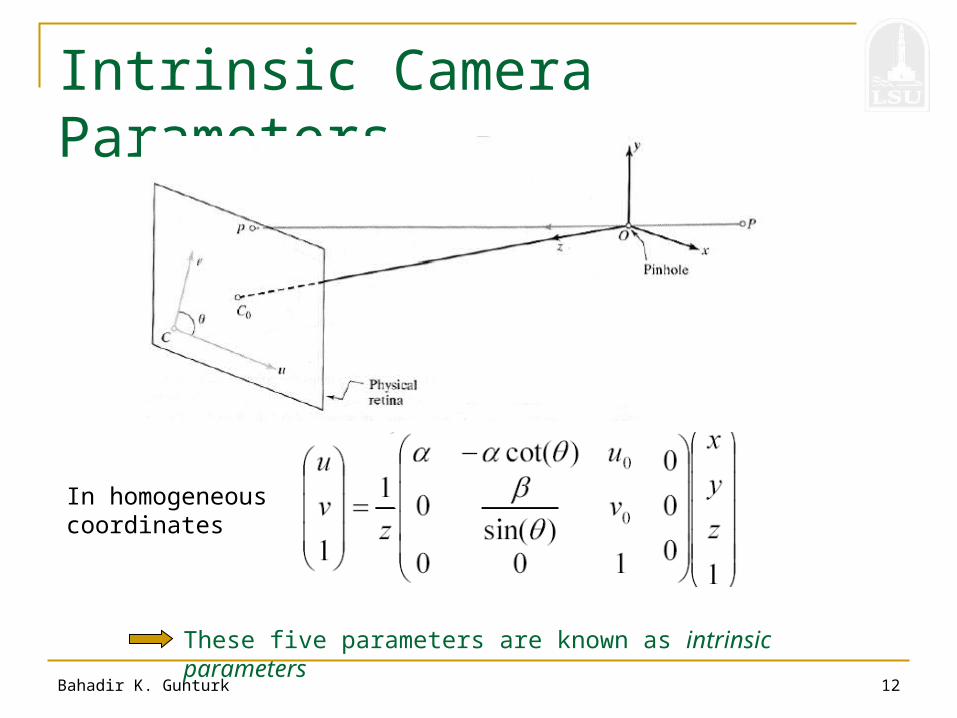
Intrinsic Camera Parameters
In homogeneous coordinates
These five parameters are known as intrinsic parameters
Bahadir K. Gunturk 13
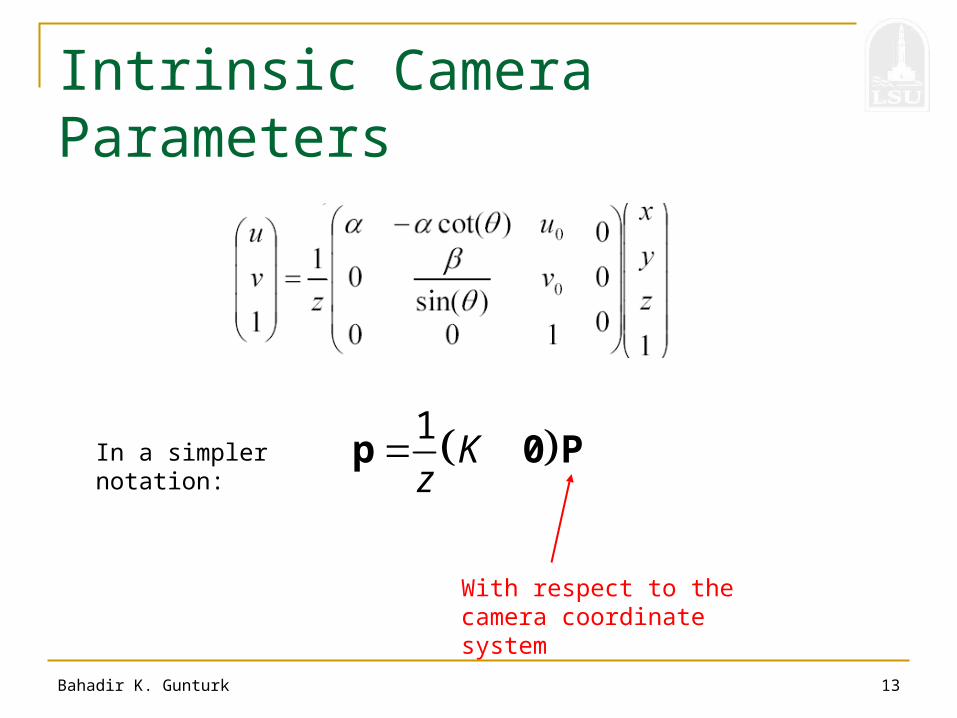
Intrinsic Camera Parameters
In a simpler notation: 1K
zp 0 P
With respect to the camera coordinate system
Bahadir K. Gunturk 14
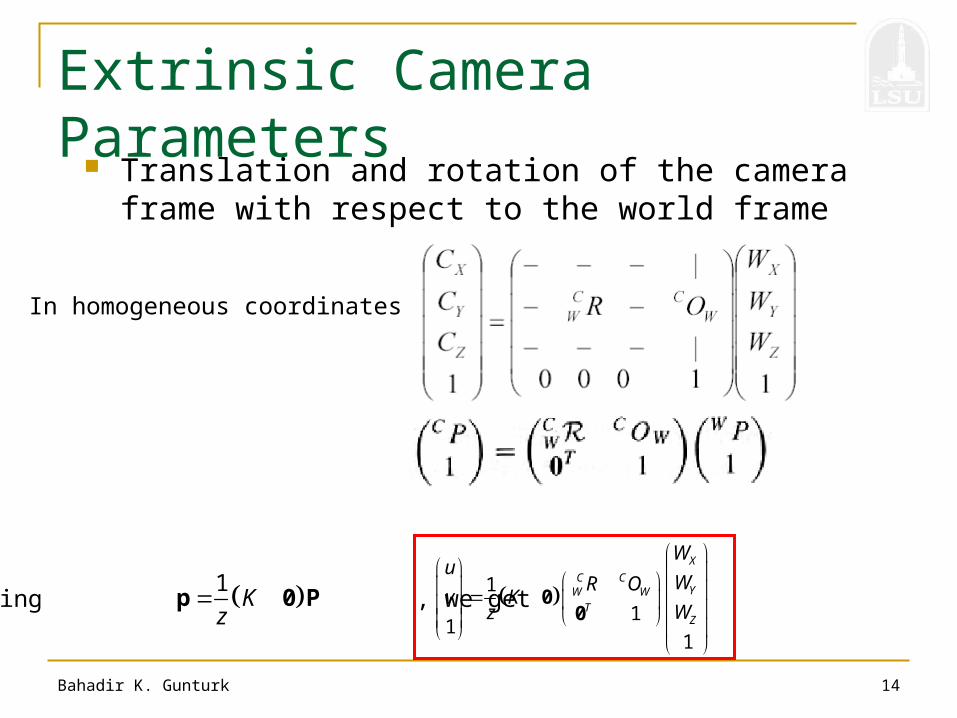
Extrinsic Camera Parameters
Translation and rotation of the camera frame with respect to the world frame
In homogeneous coordinates
1K
zp 0 PUsing , we get 1
11
1
X
C CYW W
TZ
Wu
WR Ov K
Wz
00
Bahadir K. Gunturk 15
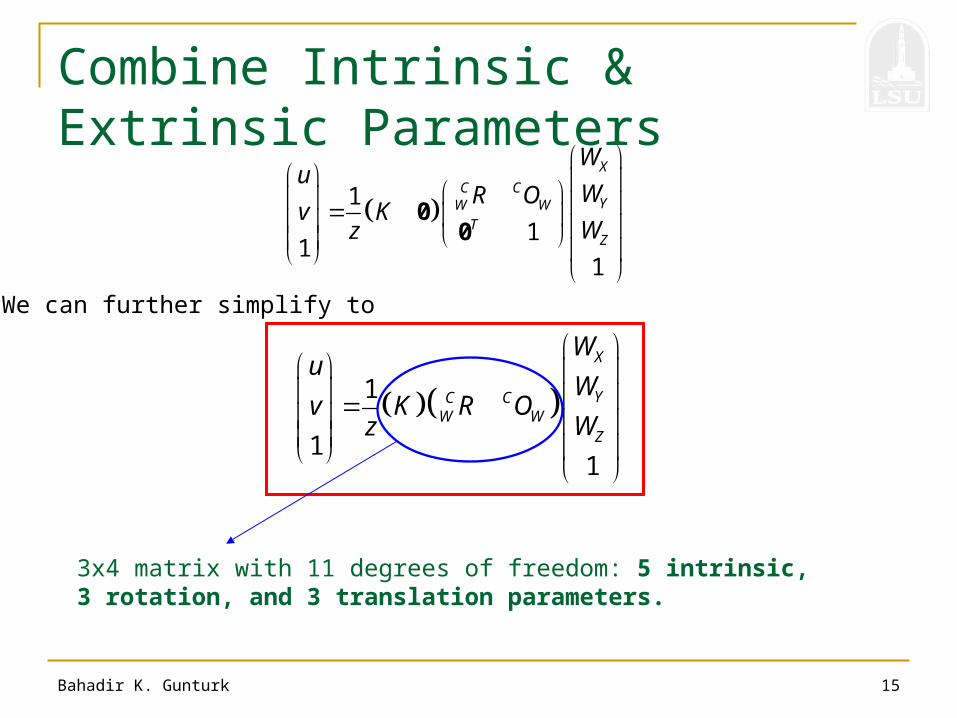
Combine Intrinsic & Extrinsic Parameters
We can further simplify to
1
11
1
X
C CYW W
TZ
Wu
WR Ov K
Wz
00
1
11
X
YC CW W
Z
Wu
Wv K R O
Wz
3x4 matrix with 11 degrees of freedom: 5 intrinsic, 3 rotation, and 3 translation parameters.
Bahadir K. Gunturk 16
Camera Calibration
Camera’s intrinsic and extrinsic parameters are found using a setup with known positions in some fixed world coordinate system.
Bahadir K. Gunturk 17
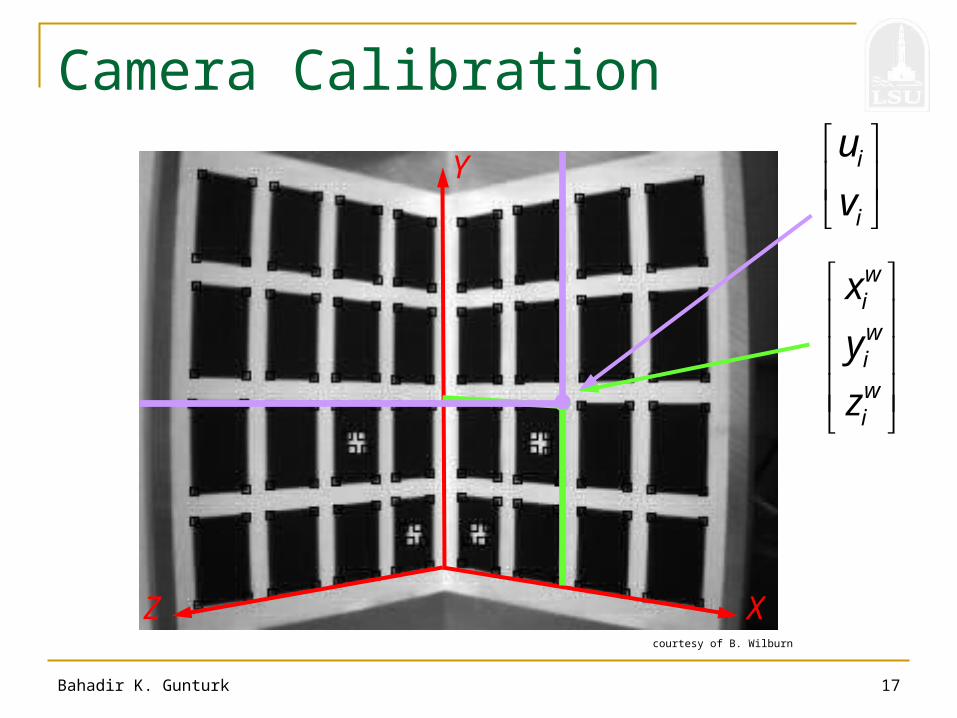
Camera Calibration
courtesy of B. Wilburn
XZ
Y i
i
u
v
wiwiwi
x
y
z
Bahadir K. Gunturk 18
Camera Calibration
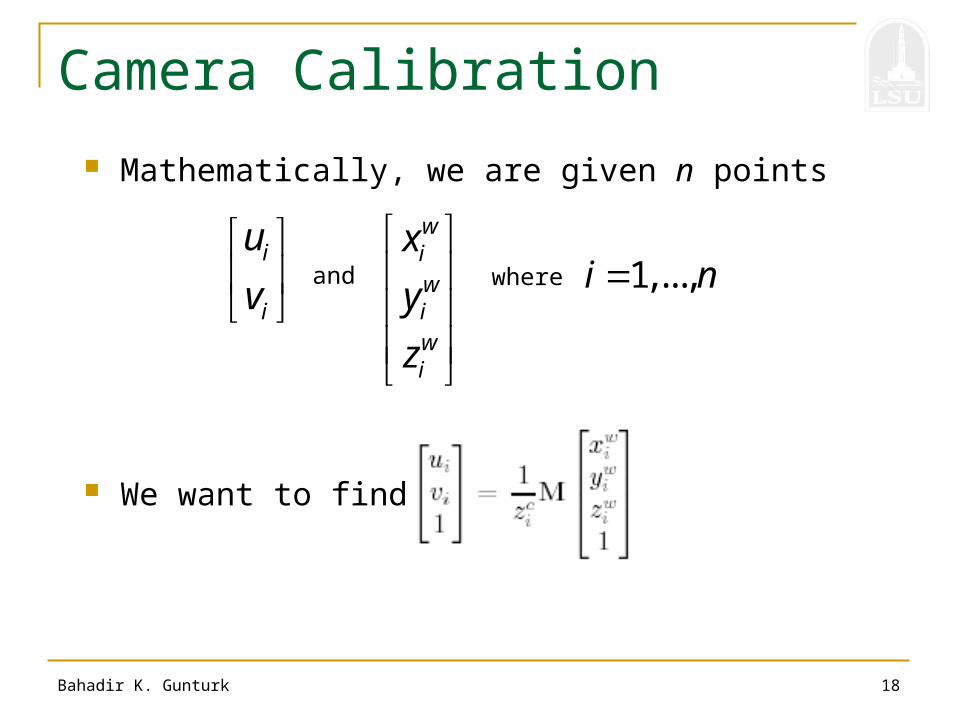
Mathematically, we are given n points
We want to find M
i
i
u
v
wiwiwi
x
y
z
1,...,i nand where
Bahadir K. Gunturk 19
Camera Calibration
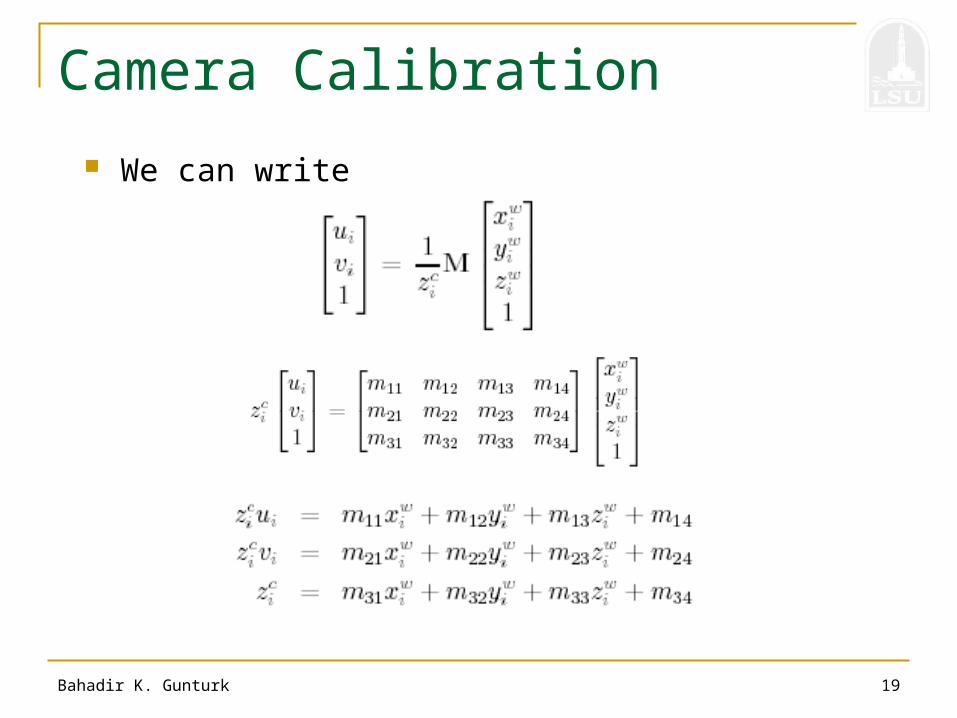
We can write
Bahadir K. Gunturk 20
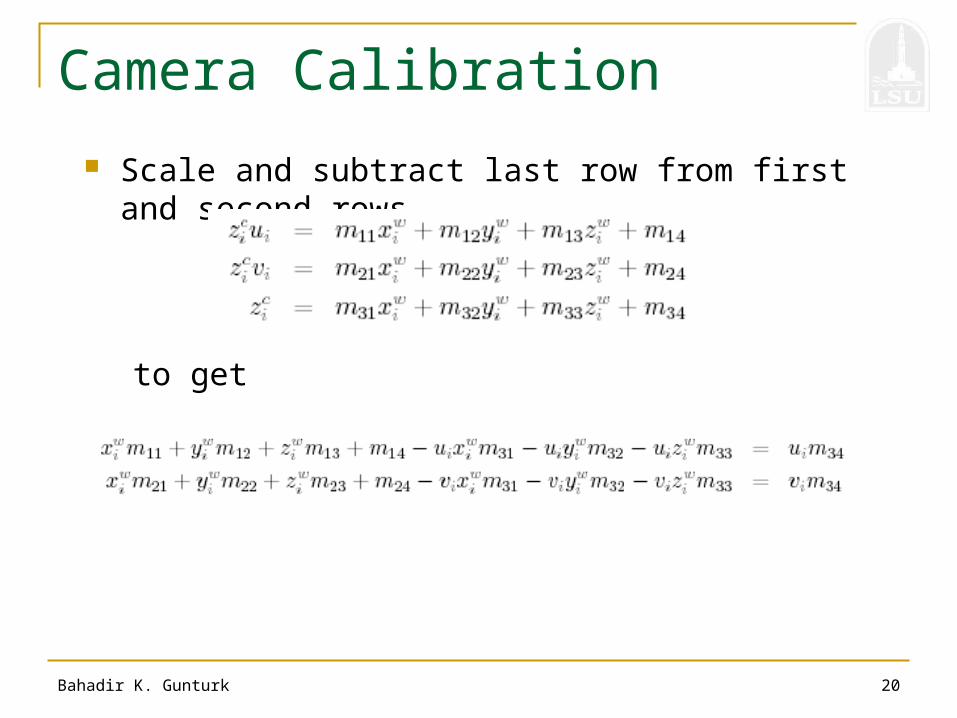
Camera Calibration
Scale and subtract last row from first and second rows
to get
Bahadir K. Gunturk 21
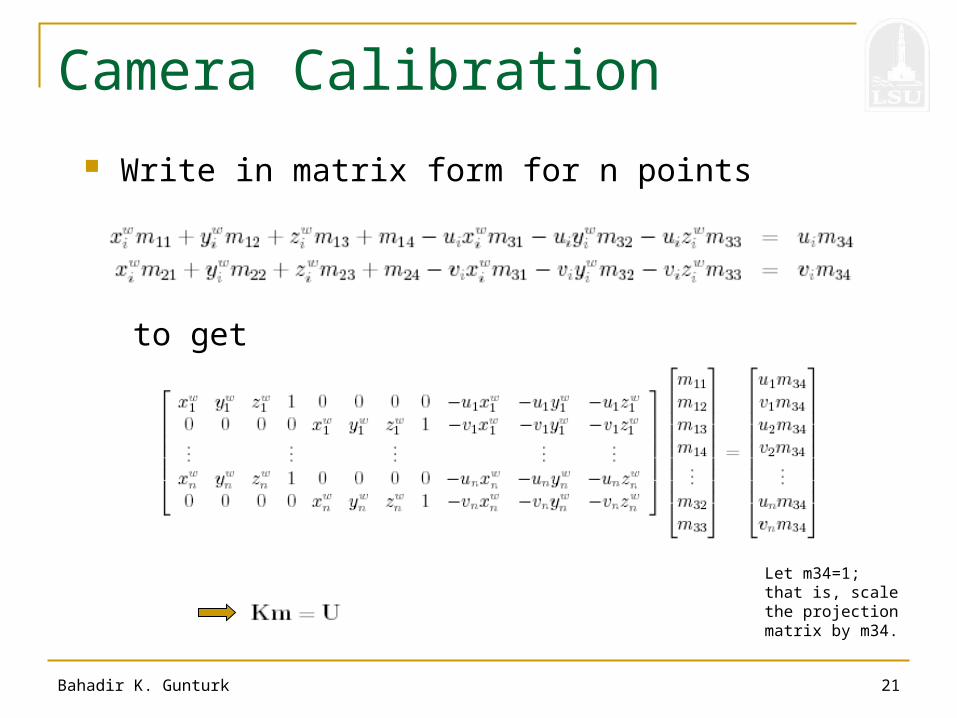
Camera Calibration
Write in matrix form for n points
to get
Let m34=1; that is, scale the projection matrix by m34.
Bahadir K. Gunturk 22
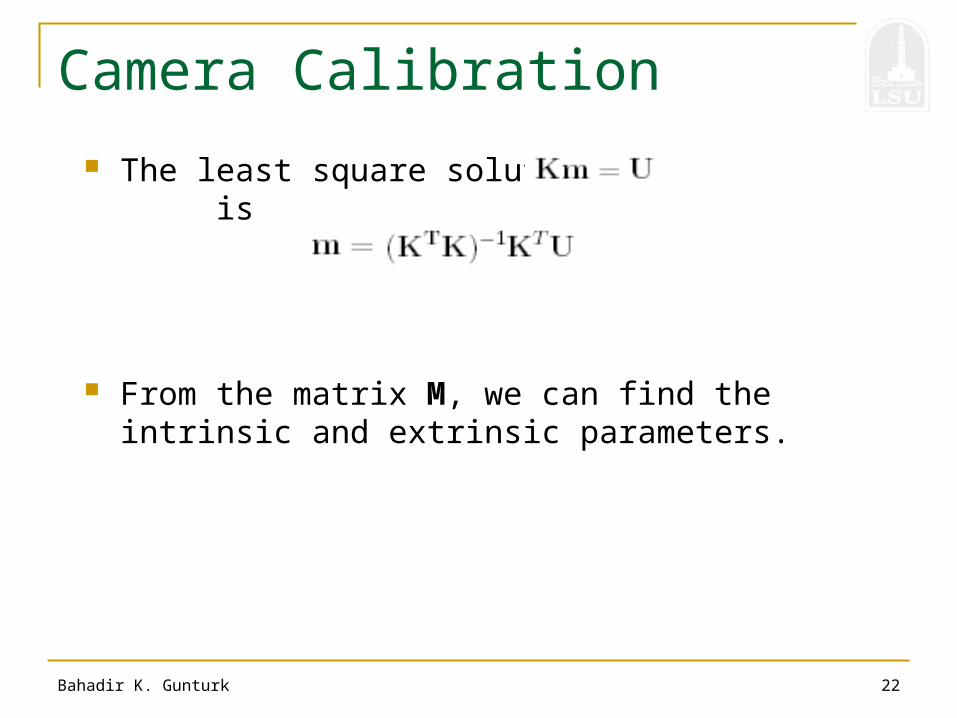
Camera Calibration
The least square solution of is
From the matrix M, we can find the intrinsic and extrinsic parameters.
Bahadir K. Gunturk 23
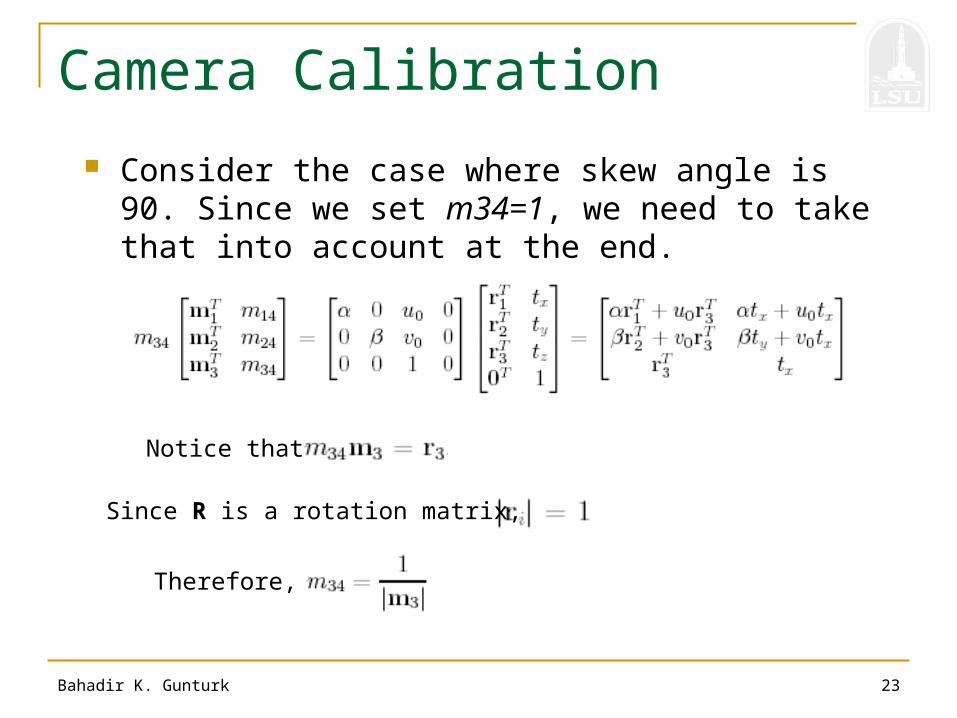
Camera Calibration
Consider the case where skew angle is 90. Since we set m34=1, we need to take that into account at the end.
Notice that
Since R is a rotation matrix,
Therefore,
Bahadir K. Gunturk 24
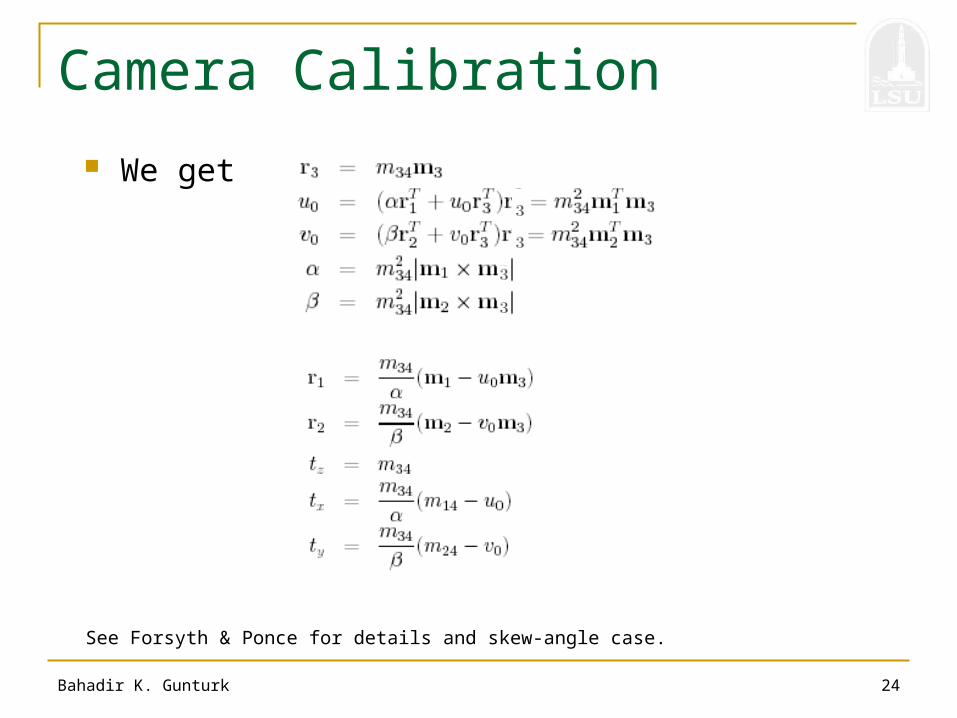
Camera Calibration
We get
See Forsyth & Ponce for details and skew-angle case.
Bahadir K. Gunturk 25
Applications
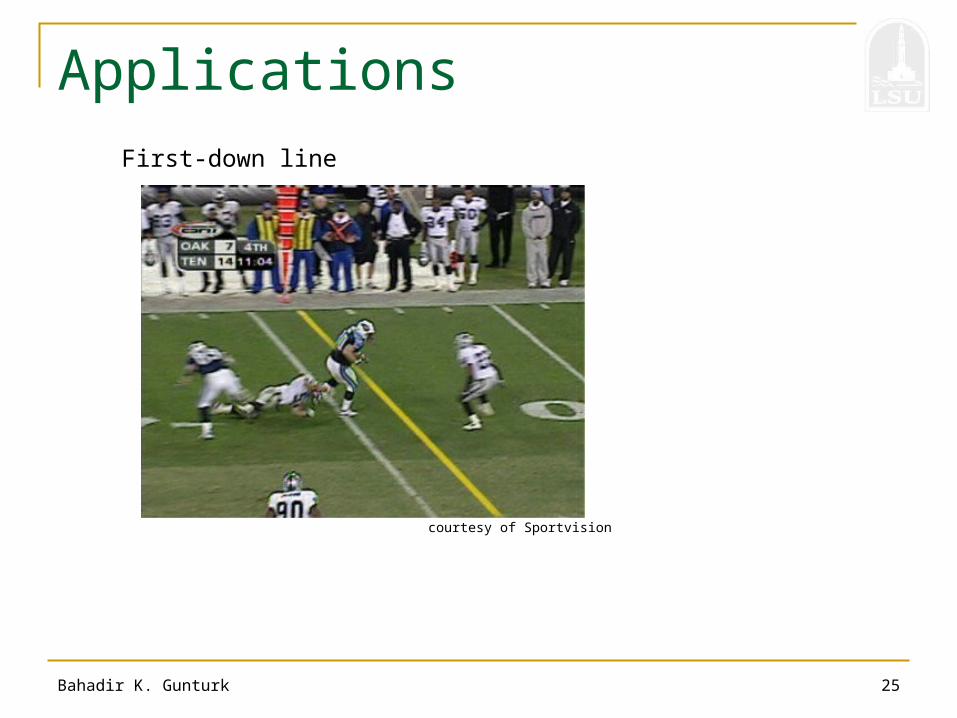
courtesy of Sportvision
First-down line
Bahadir K. Gunturk 26
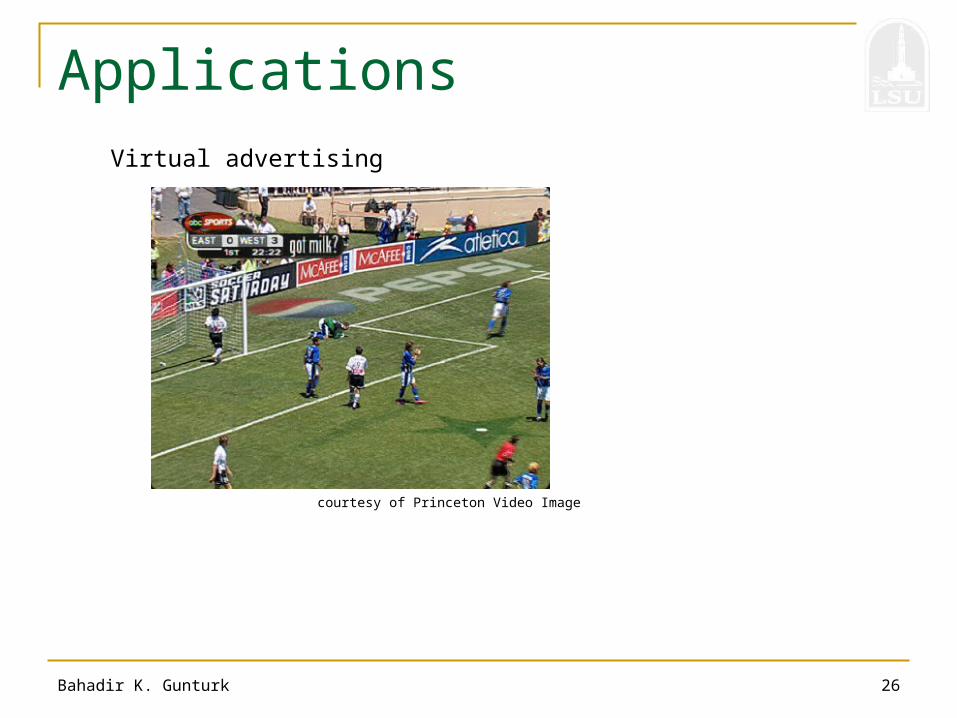
ApplicationsVirtual advertising
courtesy of Princeton Video Image
Bahadir K. Gunturk 27
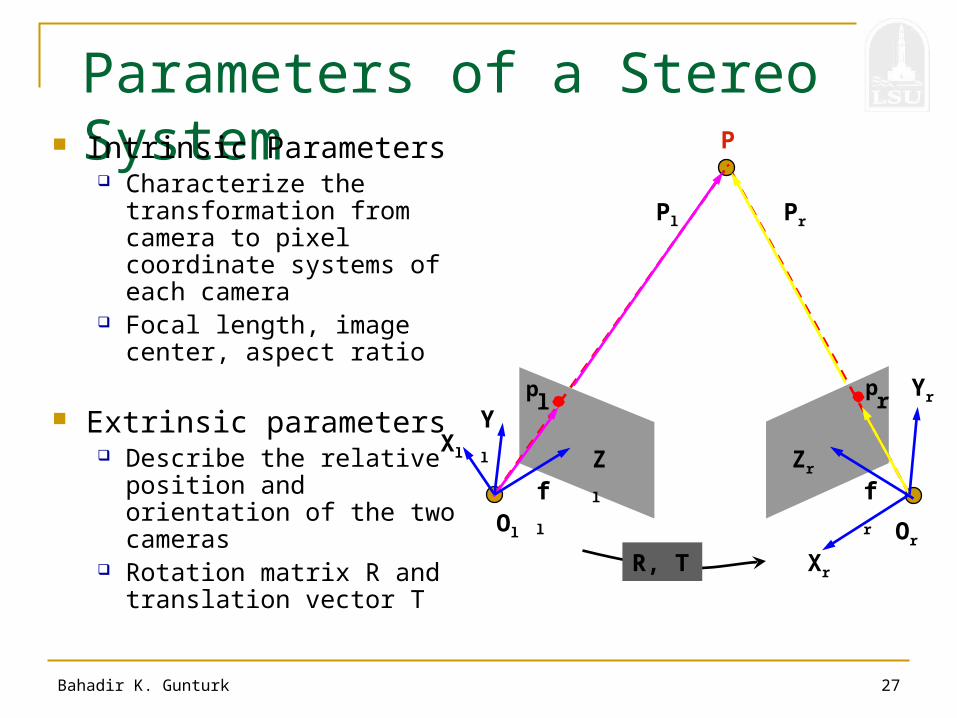
Parameters of a Stereo System Intrinsic Parameters
Characterize the transformation from camera to pixel coordinate systems of each camera
Focal length, image center, aspect ratio
Extrinsic parameters Describe the relative
position and orientation of the two cameras
Rotation matrix R and translation vector T
pl
pr
P
Ol Or
Xl
Xr
Pl Pr
fl fr
Zl
Yl
Zr
Yr
R, T
Bahadir K. Gunturk 28
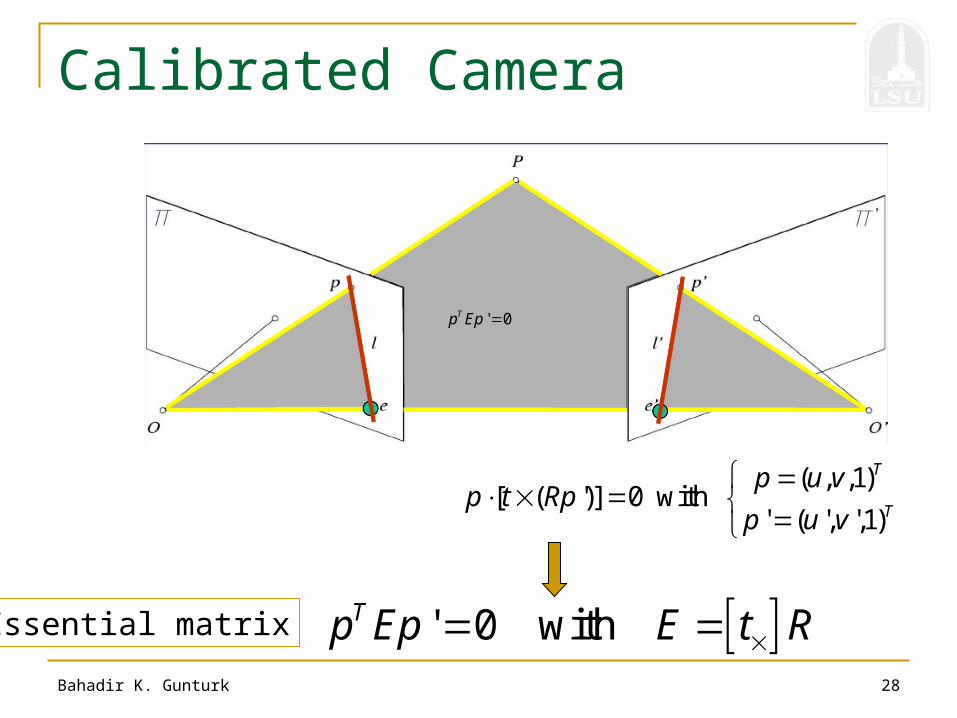
Calibrated Camera
( , ,1)[ ( ')] 0 with
' ( ', ',1)
T
T
p u vp t Rp
p u v
' 0Tp Ep
' 0 with Tp Ep E t R Essential matrix
Bahadir K. Gunturk 29
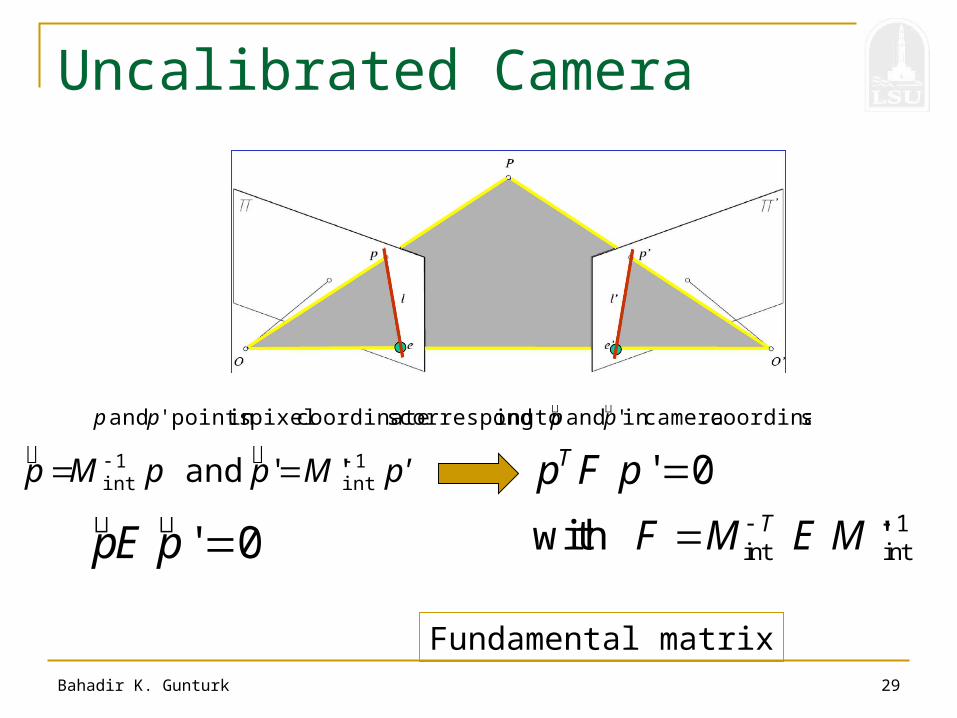
Uncalibrated Camera
' 0 pE p
scoordinate camerain ' and toingcorrespond scoordinate pixelin points ' and pppp
p'MppMp '' and 1int
1int
1int int
' 0
with '
T
T
p F p
F M E M
Fundamental matrix