
Computational Fracture Mechanics - tf.uni-kiel.de · Computational Fracture Mechanics ......
51
Computational Fracture Mechanics Summer School on Fracture Modelling and Assessment Wolfgang Brocks Christian Albrecht University Kiel Trondheim, June 2014
Transcript of Computational Fracture Mechanics - tf.uni-kiel.de · Computational Fracture Mechanics ......
Computational Fracture Mechanics
Summer School on
Fracture Modelling and Assessment
Wolfgang Brocks
Christian Albrecht University Kiel
Trondheim, June 2014
Part I: Fracture Concepts
(1) Linear elastic fracture mechanics (LEFM)
(2) Small scale yielding (SSY)
(3) Elastic-plastic fracture mechanics (EPFM)
Part II: Determination of Fracture Parameters
(4) FE meshes for structures with cracks
(5) CTOD, CTOA
(6) Stress intensity factors
(7) Elastic-plastic J-integral
Part III: The Cohesive Model
(8) Background - fundamentals
(9) The traction-separation law
(10) Examples, applications
(11) Cohesive elements in ABAQUS
Seite 1
Computational Fracture Mechanics
Part I: Fracture Concepts
Wolfgang Brocks
Christian Albrecht University , Kiel (Germany)Materials Mechanics
(1) Linear elastic fracture mechanics (LEFM)
(2) Small Scale Yielding (SSY)
(3) Elastic-plastic fracture mechanics (EPFM)
ECF20 Trondheim 2014 2CompFractMech_01 - WB
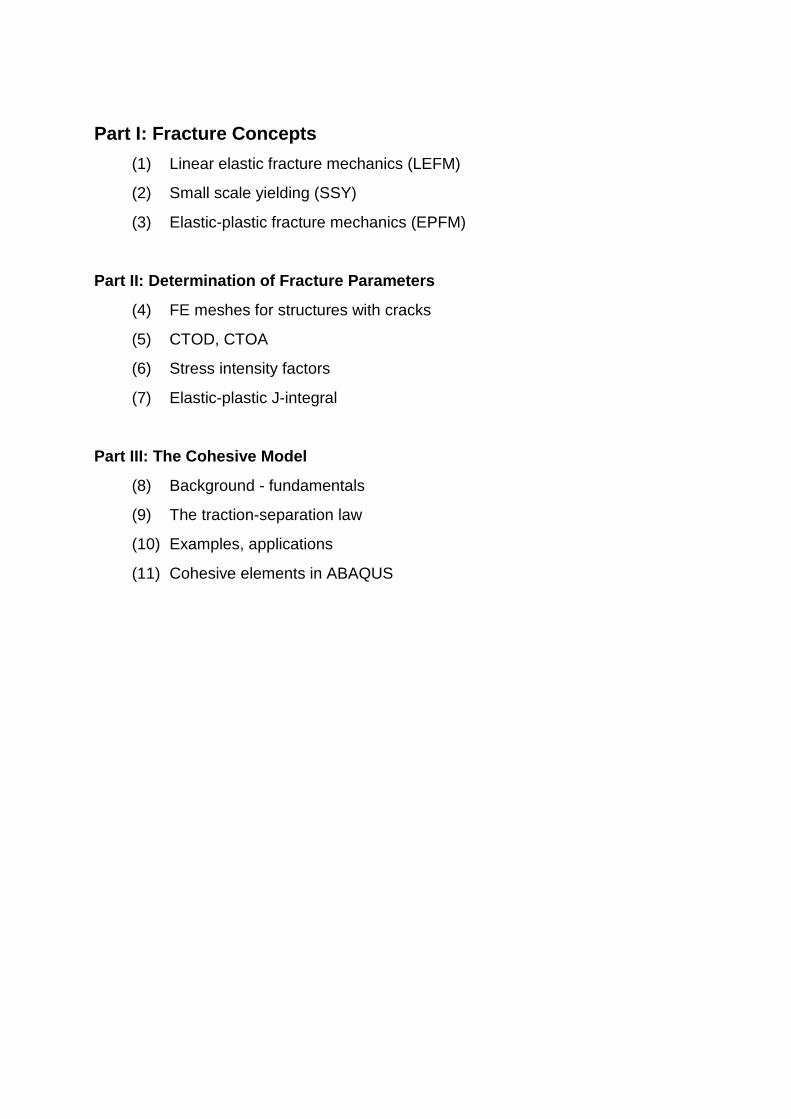
LEFM
• Stress intensity approach (IRWIN)
• Energy approach (GRIFFITH)
• J-integral
Fracture modes
Seite 2
ECF20 Trondheim 2014 3CompFractMech_01 - WB
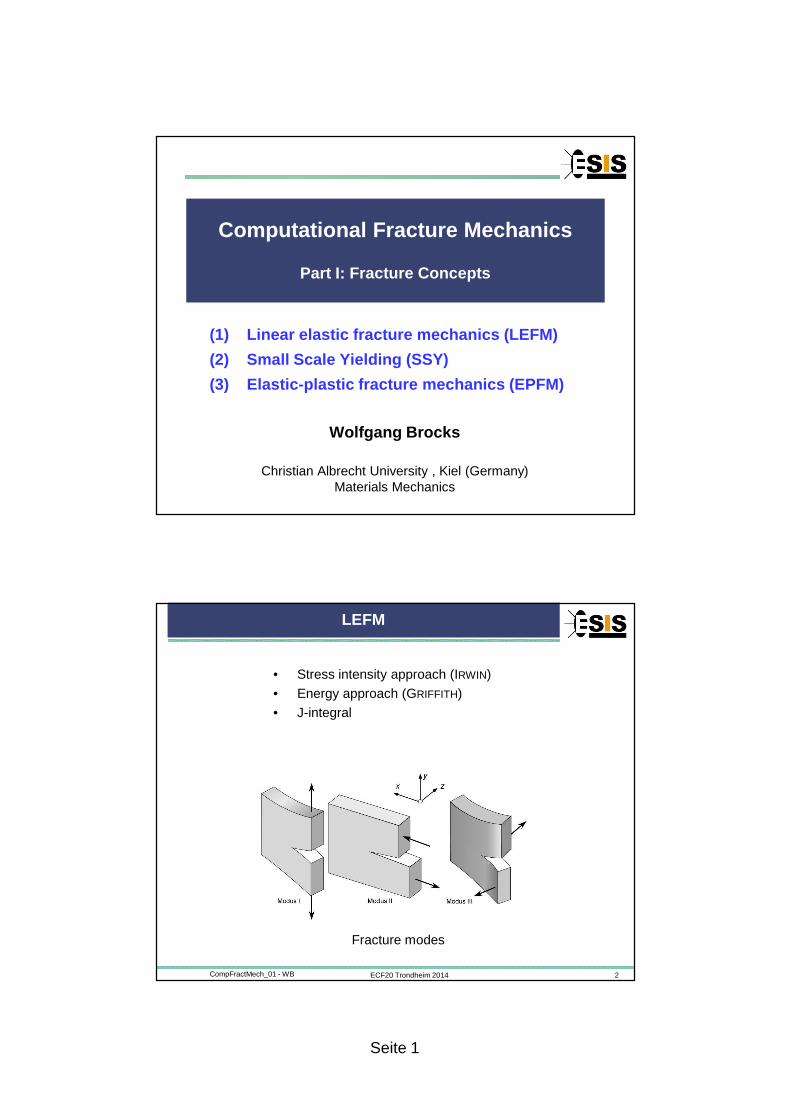
LEFM: Stress Field at a Crack Tip
IRWIN [1957]:
( ) ( ) 1 1II,
2ij ij i j
Kr f
rTσ ϑ δϑ
πδ= +
KI = stress intensity factor
T = non-singular T-stress RICE [1974]
( )I 2 geometryK a Yσ π∞=
General asymptotic solution
( ) ( ) ( ) ( )I II IIII II III
1,
2ij ij ij ijr K f K f K f
rσ ϑ ϑ ϑ ϑ
π = + + stresses
displacements ( ) ( ) ( ) ( )I II IIII II III
1,
2 2i i i i
ru r K g K g K g
Gϑ ϑ ϑ ϑ
π = + +
mode I
ECF20 Trondheim 2014 4CompFractMech_01 - WB
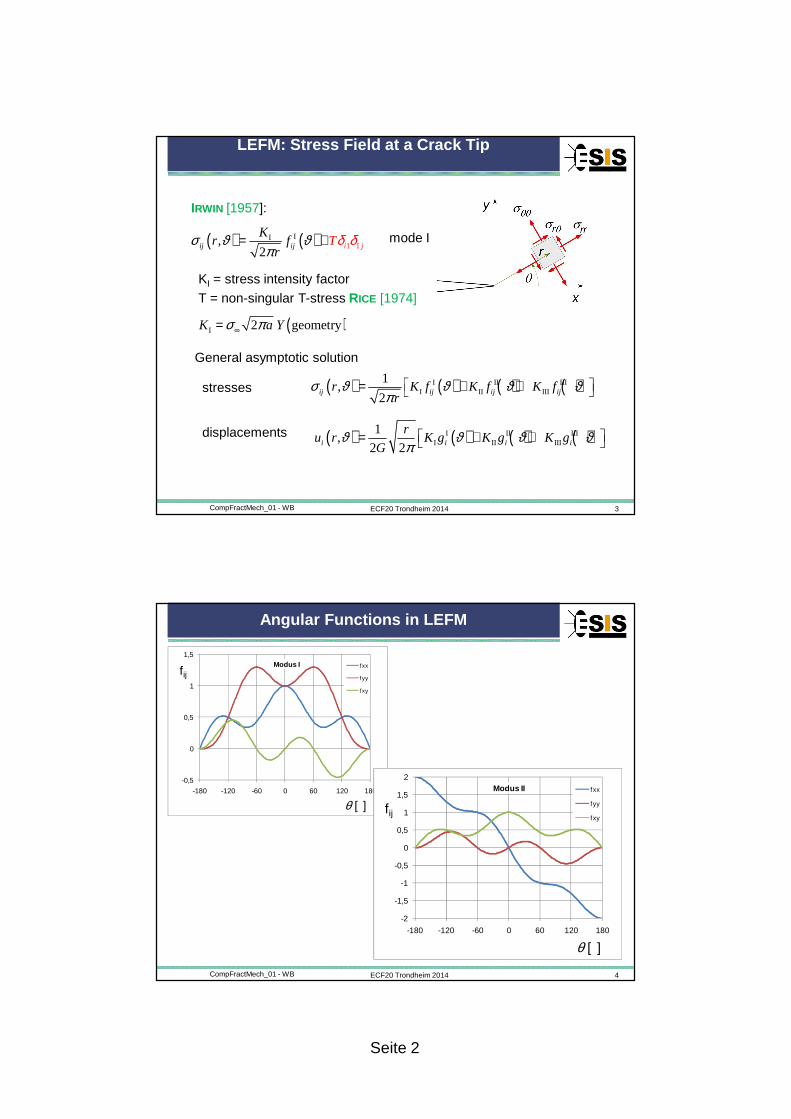
Angular Functions in LEFM
-0,5
0
0,5
1
1,5
-180 -120 -60 0 60 120 180
fij
θ [ ]
Modus I fxx
fyy
fxy
-2
-1,5
-1
-0,5
0
0,5
1
1,5
2
-180 -120 -60 0 60 120 180
fij
θ [ ]
Modus II fxx
fyy
fxy
Seite 3
ECF20 Trondheim 2014 5CompFractMech_01 - WB
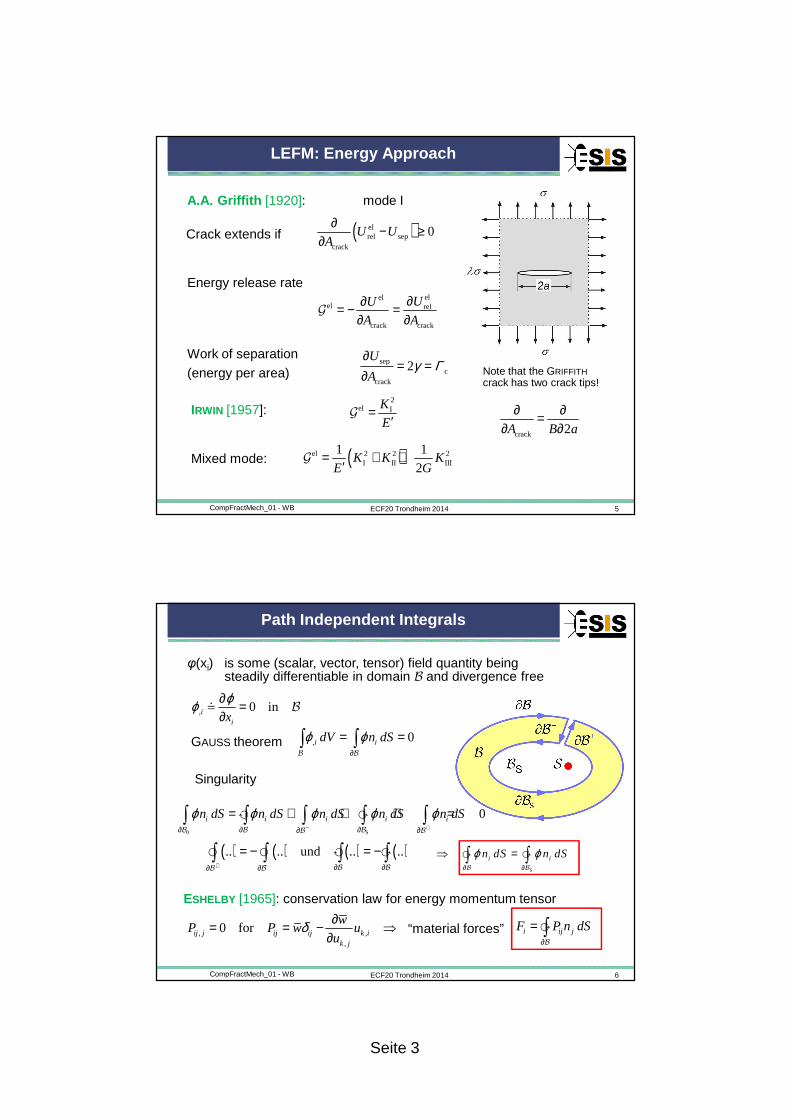
LEFM: Energy Approach
A.A. Griffith [1920]:
Crack extends if ( )elrel sep
crack
0U UA
∂ − ≥∂
Energy release rateelel
el rel
crack crack
UU
A A
∂∂= − =∂ ∂
G
Work of separation
(energy per area)sep
ccrack
2U
Aγ Γ
∂= =
∂
2el IK
E=
′GIRWIN [1957]:
Note that the GRIFFITHcrack has two crack tips!
crack 2A B a
∂ ∂=∂ ∂
Mixed mode:
mode I
( )el 2 2 2I II III
1 1
2K K K
E G= + +
′G
ECF20 Trondheim 2014 6CompFractMech_01 - WB
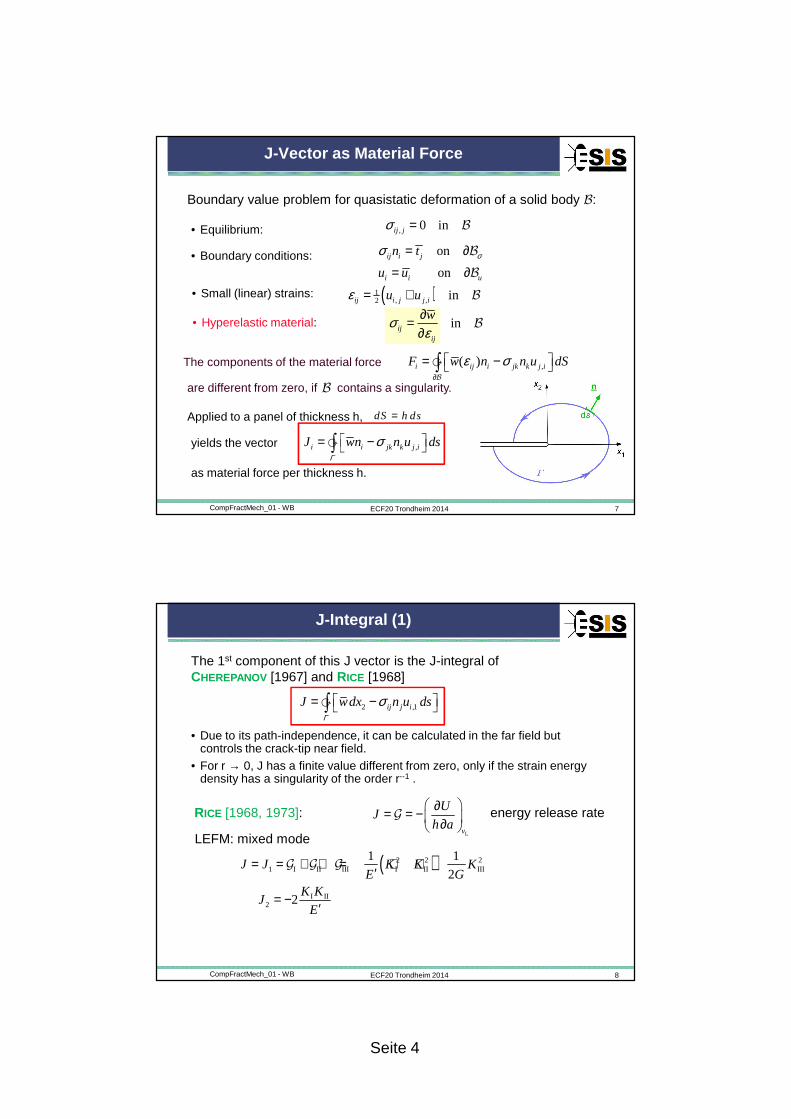
Path Independent Integrals
φ(xi) is some (scalar, vector, tensor) field quantity being steadily differentiable in domain B and divergence free
, 0 iniix
ϕϕ ∂ =∂≐ B
GAUSS theorem , 0i idV n dSϕ ϕ∂
= =∫ ∫B B
0 S
0ϕ ϕ ϕ ϕ ϕ− +∂ ∂ ∂∂ ∂
= + + + =∫ ∫ ∫ ∫ ∫� �i i i i in dS n dS n dS n dS n dSB B BB B
Singularity
( ) ( ) ( ) ( ).. .. und .. ..+ − ∂ ∂∂ ∂
= − = −∫ ∫ ∫ ∫� � � �B BB B
ESHELBY [1965]: conservation law for energy momentum tensor
, ,,
0 forij j ij ij k ik j
wP P w u
uδ ∂= = − ⇒
∂i ij jF P n dS
∂
= ∫�B
“material forces”
S
i in dS n dSϕ ϕ∂ ∂
⇒ =∫ ∫� �B B
Seite 4
ECF20 Trondheim 2014 7CompFractMech_01 - WB
J-Vector as Material Force
• Hyperelastic material: inijij
wσε
∂=∂
B
• Equilibrium: , 0 inij jσ = B
• Boundary conditions: on
onij i j
i i u
n t
u u
σσ = ∂
= ∂
B
B
• Small (linear) strains: ( )1, ,2 inij i j j iu uε = + B
Boundary value problem for quasistatic deformation of a solid body B:
The components of the material force ,( )i ij i jk k j iF w n n u dSε σ∂
= − ∫�B
Bare different from zero, if contains a singularity.
Applied to a panel of thickness h, dS h ds=
as material force per thickness h.
,i i jk k j iJ wn n u dsΓ
σ = − ∫�yields the vector
ECF20 Trondheim 2014 8CompFractMech_01 - WB
J-Integral (1)
The 1st component of this J vector is the J-integral of CHEREPANOV [1967] and RICE [1968]
2 ,1ij j iJ wdx n u dsΓ
σ = − ∫�
• Due to its path-independence, it can be calculated in the far field but controls the crack-tip near field.
• For r → 0, J has a finite value different from zero, only if the strain energy density has a singularity of the order r--1 .
LEFM: mixed mode
( )2 2 21 I II III I II III
I II2
1 1
2
2
= = + + = + +′
= −′
J J K K KE G
K KJ
E
G G G
Lv
UJ
h a
∂= = − ∂ GRICE [1968, 1973]: energy release rate
Seite 5
ECF20 Trondheim 2014 9CompFractMech_01 - WB
J-Integral (2)
� time independent processes� no volume forces� homogeneous material� plane stress and strain fields, no dependence on x3
� straight and stress free crack faces parallel to x1
further requirements:
Correction terms for body forces, surface tractions, thermal loading, multiphase materials exist in the literature:
DE LORENZI [1982], KIKUCHI & MIYAMOTO [1982], MUSCATI & LI[1984], SIEGELE [1989]
Extension to 3D: • KIKUCHI et al. [1979], • AMESTOY et al. [1981], • BAKKER [1984]
( )c 1 ,1
1 ,13
Γ
σ
σξ−
= −
∂ − − ∂
∫
∫∫
� ij j i
ij j i
J s wn n u ds
wn n u dSS
ECF20 Trondheim 2014 10CompFractMech_01 - WB
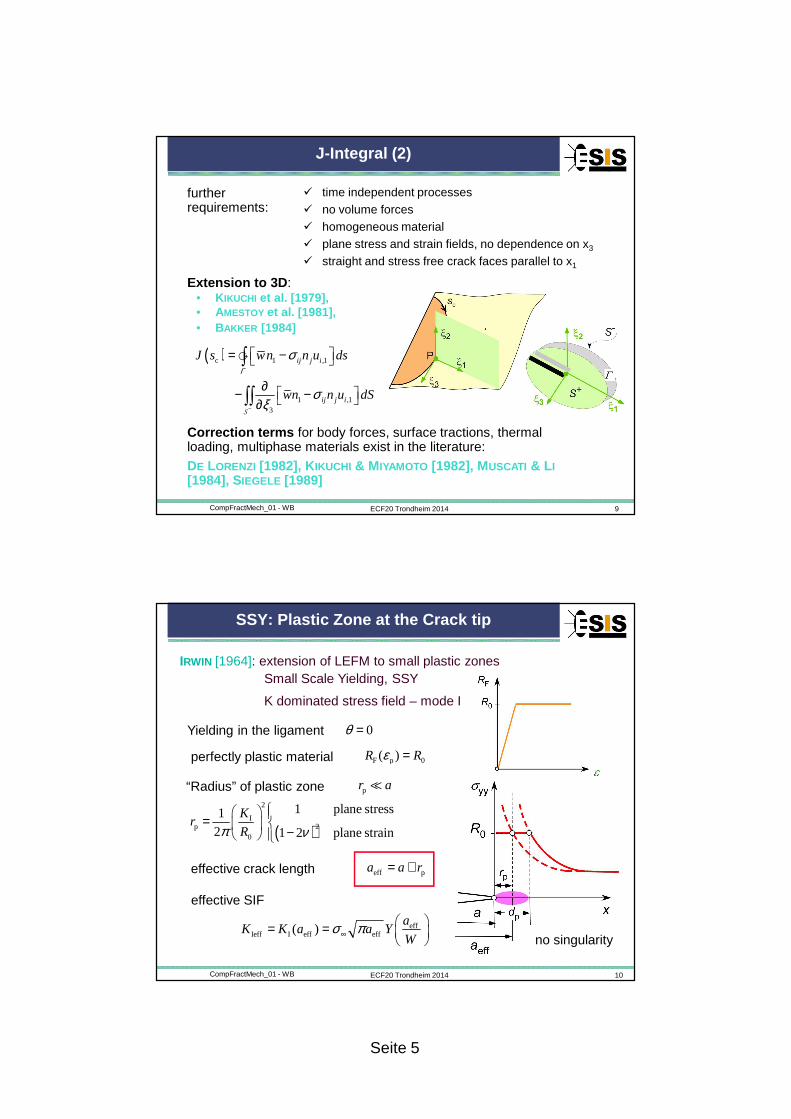
SSY: Plastic Zone at the Crack tip
IRWIN [1964]: extension of LEFM to small plastic zones Small Scale Yielding, SSY
K dominated stress field – mode I
0θ =Yielding in the ligament
perfectly plastic material F p 0( )R Rε =
( )
2
I2p
0
1 plane stress1
2 1 2 plane strain
Kr
Rπ ν = −
“Radius” of plastic zone pr a≪
effIeff I eff eff( )
aK K a a Y
Wσ π∞
= =
effective SIF
eff pa a r= +effective crack length
no singularity
Seite 6
ECF20 Trondheim 2014 11CompFractMech_01 - WB
DUGDALE Model
0 p( ,0) , 0yy r R r dσ = ≤ ≤
p0 0
1 cos sec 12 2
d c aR R
π σ π σ∞ ∞
= − = −
p2 2 2c a d= +
(1) (2)I I 0
2, arccos
aK c K R c
cσ π π
π∞= = −Superposition
0
cos2
a
c R
π σ∞ ⇒ =
no singularity (1) (2)
I I 0K K+ =!
no restrictionwith respect toplastic zone size!
strip
yield
model
DUGDALE [1960]:
ECF20 Trondheim 2014 12CompFractMech_01 - WB
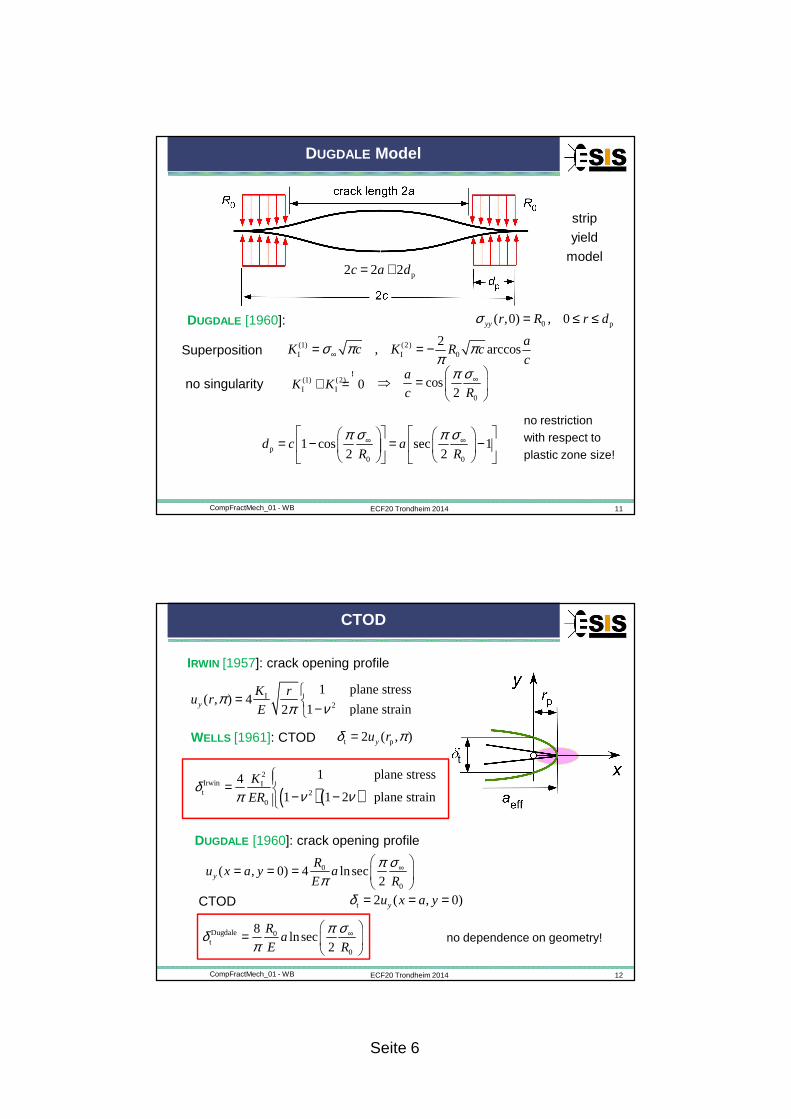
CTOD
I2
1 plane stress( , ) 4
1 plane strain2y
K ru r
Eπ
νπ
= −
t p2 ( , )yu rδ π=WELLS [1961]: CTOD
IRWIN [1957]: crack opening profile
0
0
( , 0) 4 lnsec2y
Ru x a y a
E R
π σπ
∞ = = =
t 2 ( , 0)yu x a yδ = = =CTOD
DUGDALE [1960]: crack opening profile
Dugdale 0t
0
8lnsec
2
Ra
E R
π σδπ
∞ =
no dependence on geometry!
( )( )2
Irwin It 2
0
1 plane stress41 1 2 plane strain
K
ERδ
ν νπ= − −
Seite 7
ECF20 Trondheim 2014 13CompFractMech_01 - WB
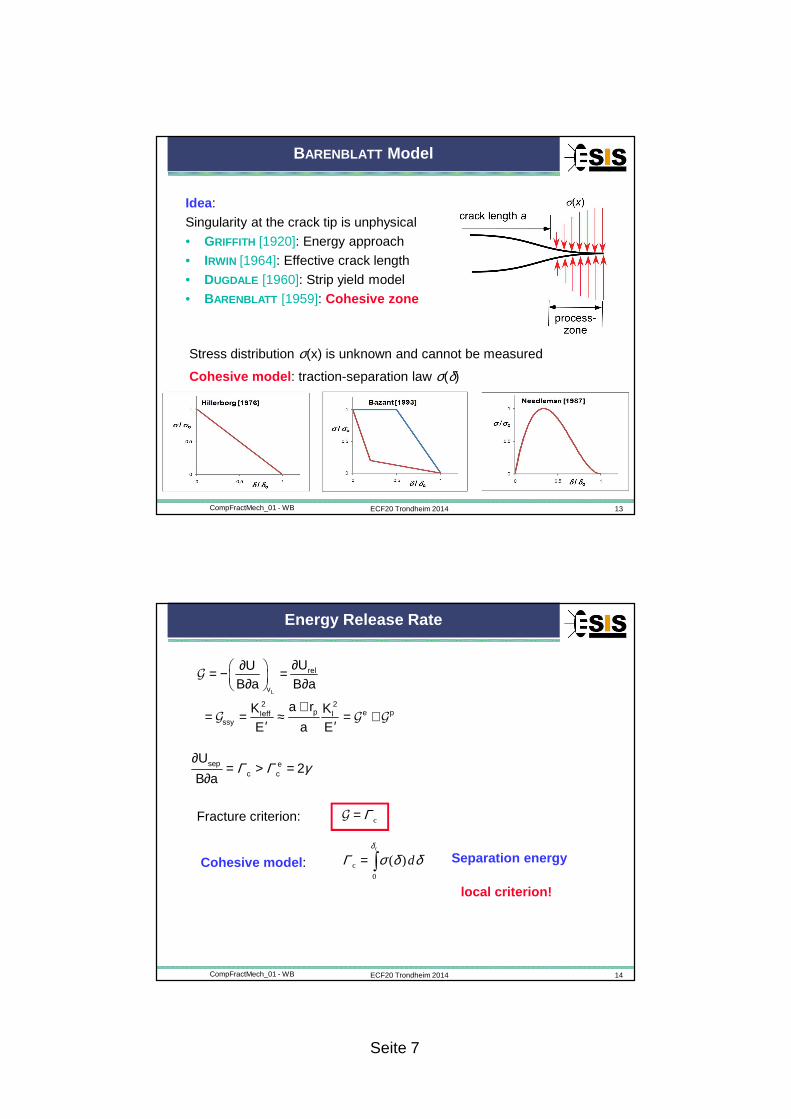
BARENBLATT Model
Idea:
Singularity at the crack tip is unphysical
• GRIFFITH [1920]: Energy approach
• IRWIN [1964]: Effective crack length
• DUGDALE [1960]: Strip yield model
• BARENBLATT [1959]: Cohesive zone
Stress distribution σ(x) is unknown and cannot be measured
Cohesive model: traction-separation law σ(δ)
ECF20 Trondheim 2014 14CompFractMech_01 - WB
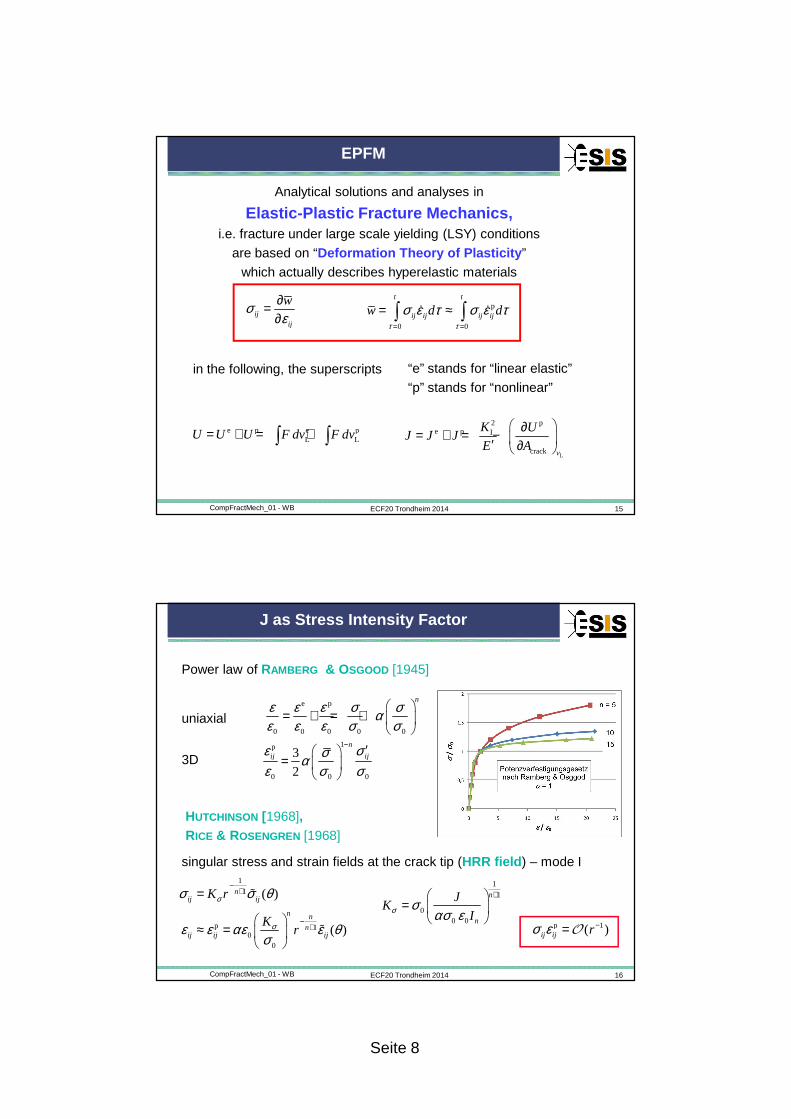
Energy Release Rate
∂∂ = − = ∂ ∂
+= = ≈ = +
′ ′
G
G G G
L
rel
2 2p e pIeff I
ssy
v
UUB a B a
a rK KE a E
Γ Γ γ∂
= > =∂sep e
c c 2U
B a
Separation energyCohesive model:c
c
0
( )dδ
Γ σ δ δ= ∫
cΓ=GFracture criterion:
local criterion!
Seite 8
ECF20 Trondheim 2014 15CompFractMech_01 - WB
EPFM
Analytical solutions and analyses in
Elastic-Plastic Fracture Mechanics,i.e. fracture under large scale yielding (LSY) conditions
are based on “Deformation Theory of Plasticity”
which actually describes hyperelastic materials
ijij
wσε
∂=∂
p
0 0
t t
ij ij ij ijw d dτ τ
σ ε τ σ ε τ= =
= ≈∫ ∫ɺ ɺ
“e” stands for “linear elastic”
“p” stands for “nonlinear”
e p e pL LU U U F dv F dv= + = +∫ ∫
L
2 pe p I
crack v
K UJ J J
E A
∂= + = − ′ ∂
in the following, the superscripts
ECF20 Trondheim 2014 16CompFractMech_01 - WB
J as Stress Intensity Factor
Power law of RAMBERG & OSGOOD [1945]
e p
0 0 0 0 0
nε ε ε σ σαε ε ε σ σ
= + = +
uniaxial
1p
0 0 0
3
2
n
ij ijε σσαε σ σ
− ′ =
3D
HUTCHINSON [1968], RICE & ROSENGREN [1968]
singular stress and strain fields at the crack tip (HRR field) – mode I1
1
p 10
0
( )
( )
nij ij
n n
nij ij ij
K r
Kr
σ
σ
σ σ θ
ε ε αε ε θσ
−+
−+
=
≈ =
ɶ
ɶ
1
1
00 0
n
n
JK
Iσ σασ ε
+ =
p 1( )ij ij rσ ε −=O
Seite 9
ECF20 Trondheim 2014 17CompFractMech_01 - WB
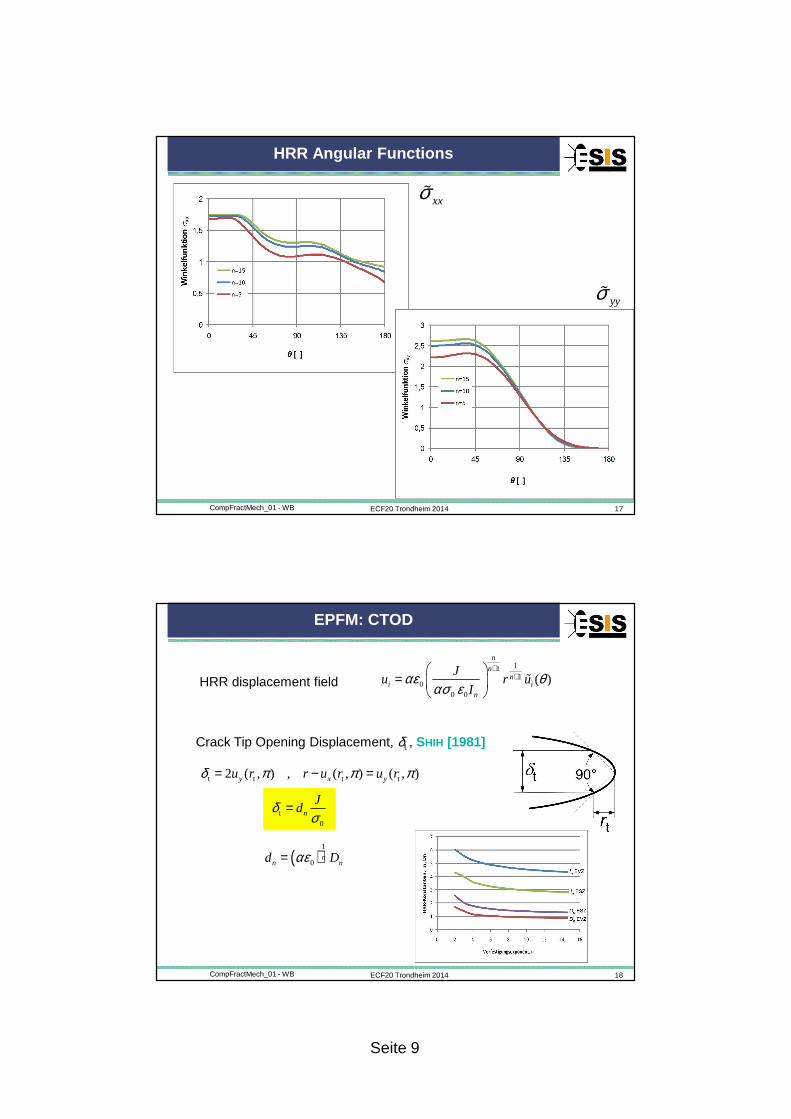
HRR Angular Functions
xxσɶ
yyσɶ
ECF20 Trondheim 2014 18CompFractMech_01 - WB
EPFM: CTOD
HRR displacement field11
10
0 0
( )
n
nn
i in
Ju r u
Iαε θ
ασ ε+
+
=
ɶ
Crack Tip Opening Displacement, δt , SHIH [1981]
t t t t2 ( , ) , ( , ) ( , )y x yu r r u r u rδ π π π= − =
t0
n
Jdδ
σ=
( )1
0n
n nd Dαε=
Seite 10
ECF20 Trondheim 2014 19CompFractMech_01 - WB
Path Dependence of J
FE simulationC(T) specimen
plane strain
stationary crack
incremental theoryof plasticity
ASTM E 1820: reference value
“far field” value
e pJ J J= +2
e IKJ
E=
′( )IK a Y a Wσ π∞=
( )p
p UJ
B W a
η=−
ECF20 Trondheim 2014 20CompFractMech_01 - WB
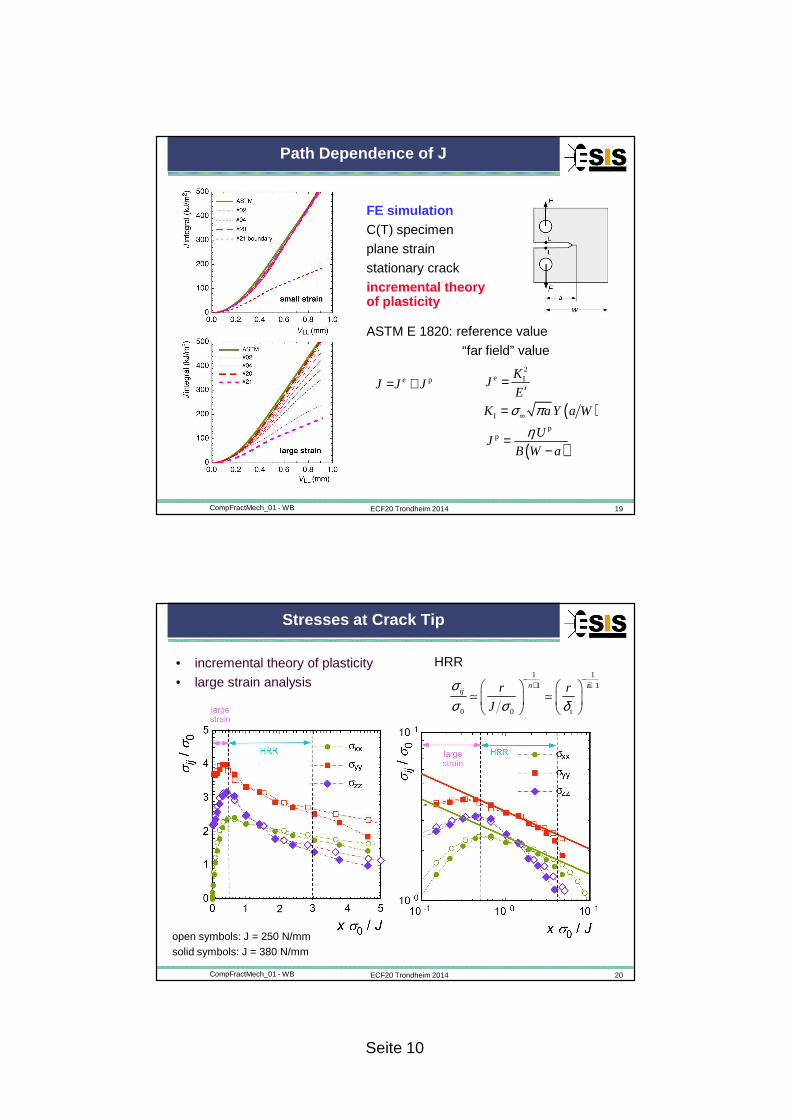
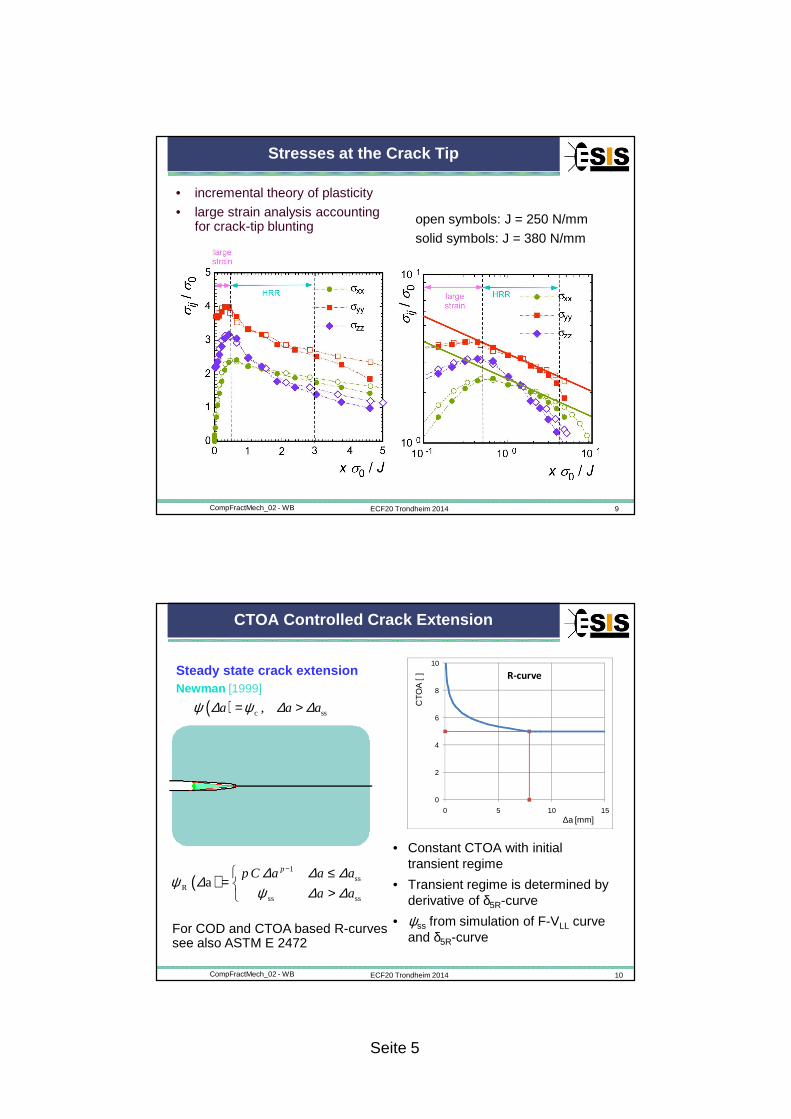
Stresses at Crack Tip
• incremental theory of plasticity
• large strain analysis1 1
1 1
0 0 t
n nij r r
J
σσ σ δ
− −+ +
≃ ≃
HRR
open symbols: J = 250 N/mmsolid symbols: J = 380 N/mm

Seite 11
ECF20 Trondheim 2014 21CompFractMech_01 - WB
Literature
W. BROCKS, A. CORNEC, I. SCHEIDER: Computational Aspects of Nonlinear Fracture Mechanics. In: I. Milne, R.O. Ritchie, B. Karihaloo(Eds.): Comprehensive Structural Integrity - Numerical and Computational Methods. Vol. 3, Oxford: Elsevier, 2003. 127 - 209. (ISBN: 0-08-043749-4)
W. BROCKS: Computational Fracture Mechanics. In: D. RAABE, F. ROTERS, F. BARLAT, L.-Q. CHEN (Eds.): Continuum Scale Simulation of Engineering Materials. Weinheim: WILEY-VCH, 2004. 621 - 637
W. BROCKS, W.: Computational Fracture Mechanics. In: R. BLOCKLEY, W. SHYY (Eds.): Encyclopedia of Aerospace Engineering, Vol. 3, John Wiley & Sons, 2010.
M. KUNA: Finite Elements in Fracture Mechanics, Springer Dordrecht, 2013. (ISBN 978-94-007-6679-2)
Seite 1
Computational Fracture Mechanics
Part II: Determination of Fracture Parameters
Wolfgang Brocks
Christian Albrecht University , Kiel (Germany)Materials Mechanics
(1) FE meshes for structures with cracks
(2) CTOD, CTOA
(3) Stress intensity factors
(4) Elastic-plastic J-integral
ECF20 Trondheim 2014 2CompFractMech_02 - WB
FE Models - General
Cracks and crack-like defects induce high stress and strain gradients which require a fine discretisation → large number of elements and degrees of freedom.
Reduce number of DOF by
� 2D models whenever possible,
� Coarsening of the mesh remote from the defect,
� Account for symmetry conditions,
� Apply singular elements with special shape functions.
Modelling means reduction of complexity and simplifi cation:• Models should be as simple as possible and only as
complex as unavoidable
Seite 2
ECF20 Trondheim 2014 3CompFractMech_02 - WB
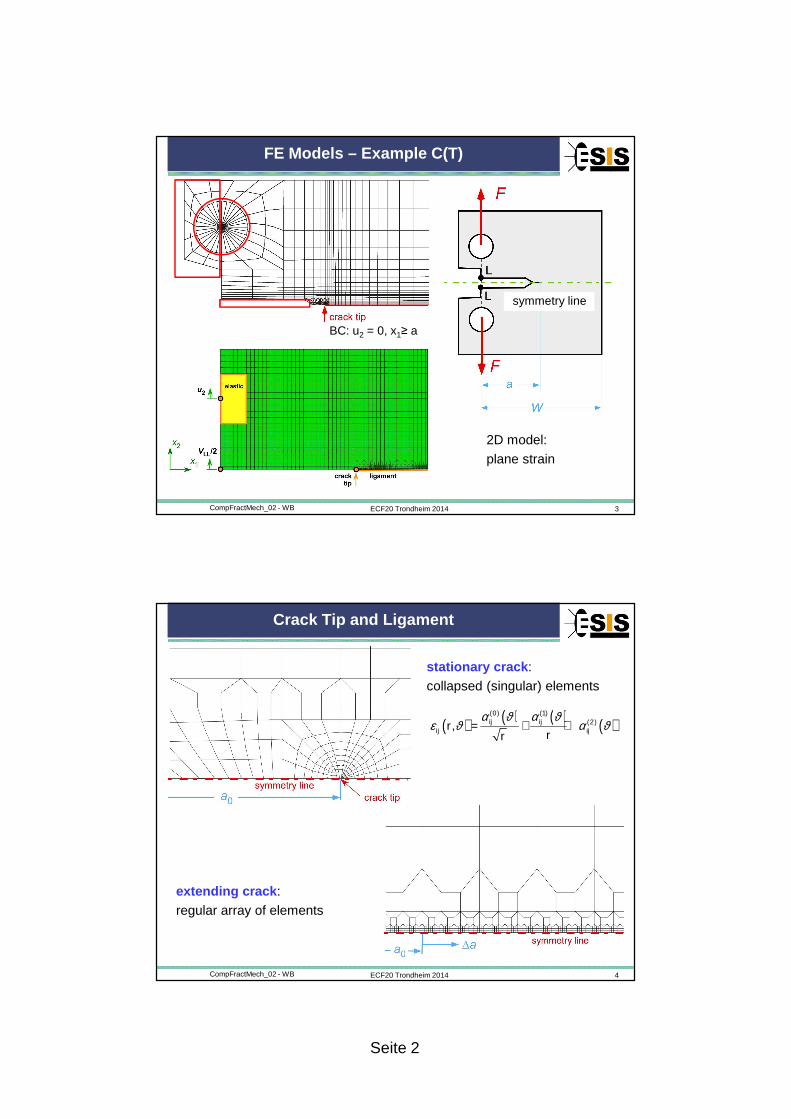
FE Models – Example C(T)
symmetry line
2D model:
plane strain
BC: u2 = 0, x1≥ a
ECF20 Trondheim 2014 4CompFractMech_02 - WB
Crack Tip and Ligament
stationary crack :
collapsed (singular) elements
extending crack :
regular array of elements
( ) ( ) ( ) ( )(0) (1)
(2), ij ijij ijr
rr
α ϑ α ϑε ϑ α ϑ= + +
Seite 3
ECF20 Trondheim 2014 5CompFractMech_02 - WB
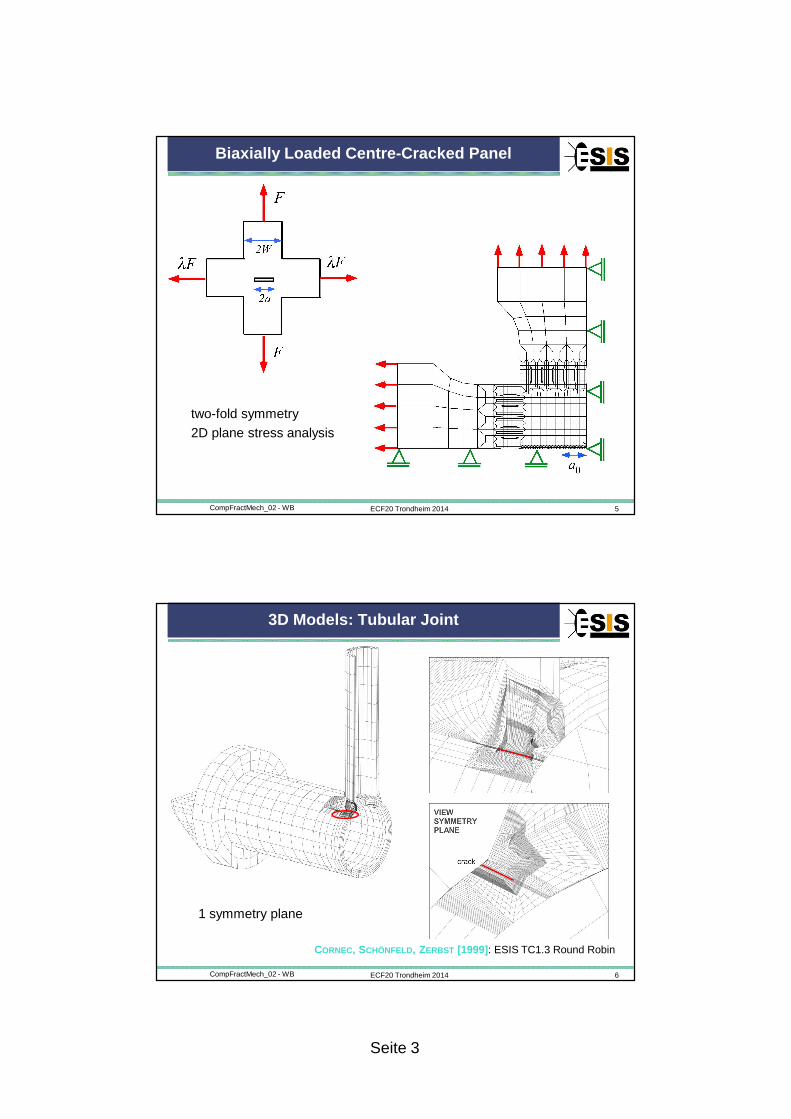
Biaxially Loaded Centre-Cracked Panel
two-fold symmetry
2D plane stress analysis
ECF20 Trondheim 2014 6CompFractMech_02 - WB
3D Models: Tubular Joint
CORNEC, SCHÖNFELD, ZERBST [1999] : ESIS TC1.3 Round Robin
1 symmetry plane
Seite 4
ECF20 Trondheim 2014 7CompFractMech_02 - WB
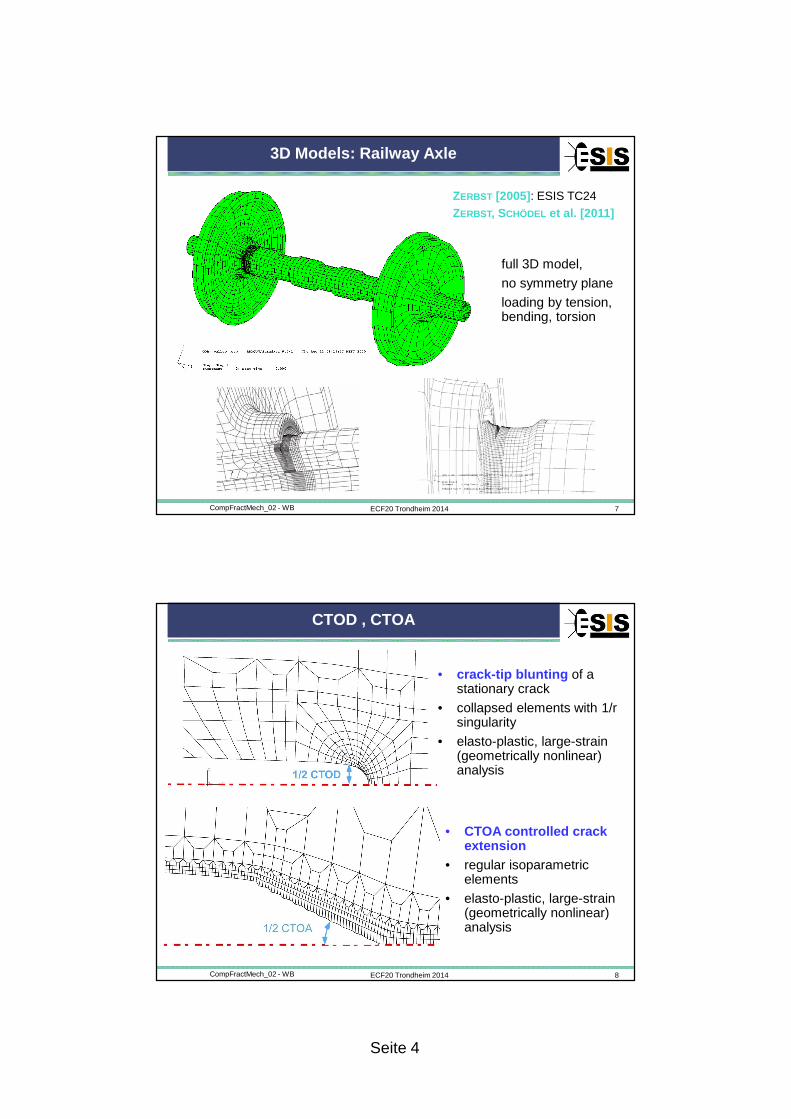
3D Models: Railway Axle
ZERBST [2005]: ESIS TC24ZERBST, SCHÖDEL et al. [2011]
full 3D model,
no symmetry plane
loading by tension, bending, torsion
ECF20 Trondheim 2014 8CompFractMech_02 - WB
CTOD , CTOA
• crack-tip blunting of a stationary crack
• collapsed elements with 1/rsingularity
• elasto-plastic, large-strain (geometrically nonlinear) analysis
• CTOA controlled crack extension
• regular isoparametricelements
• elasto-plastic, large-strain (geometrically nonlinear) analysis
Seite 5
ECF20 Trondheim 2014 9CompFractMech_02 - WB
Stresses at the Crack Tip
• incremental theory of plasticity
• large strain analysis accounting for crack-tip blunting open symbols: J = 250 N/mm
solid symbols: J = 380 N/mm
ECF20 Trondheim 2014 10CompFractMech_02 - WB
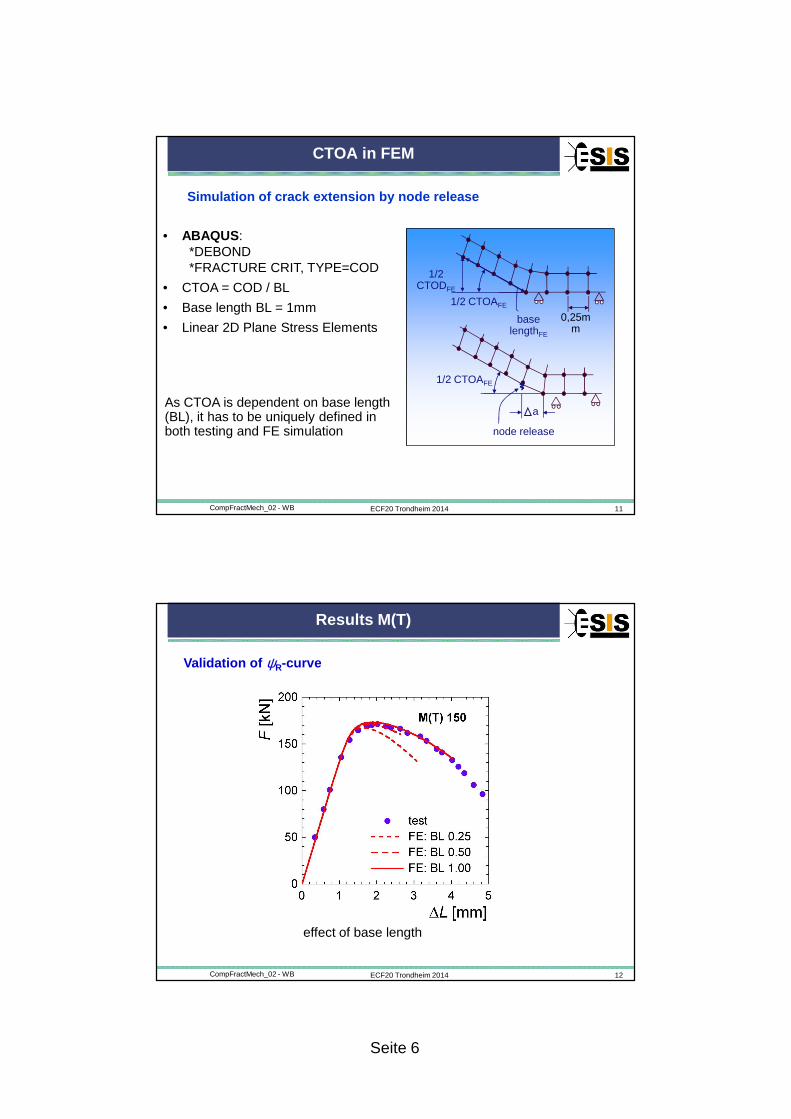
CTOA Controlled Crack Extension
Steady state crack extensionNewman [1999]
( ) c ss,a a aψ ∆ ψ ∆ ∆= >
• Constant CTOA with initial transient regime
• Transient regime is determined by derivative of δ5R-curve
• ψss from simulation of F-VLL curve and δ5R-curve
( )1
ssR
ss ss
app C a a a
a a
∆ ∆ ∆ψ ∆ψ ∆ ∆
− ≤= >
0
2
4
6
8
10
0 5 10 15
CTO
A [
]
∆a [mm]
R-curve
For COD and CTOA based R-curves see also ASTM E 2472
Seite 6
ECF20 Trondheim 2014 11CompFractMech_02 - WB
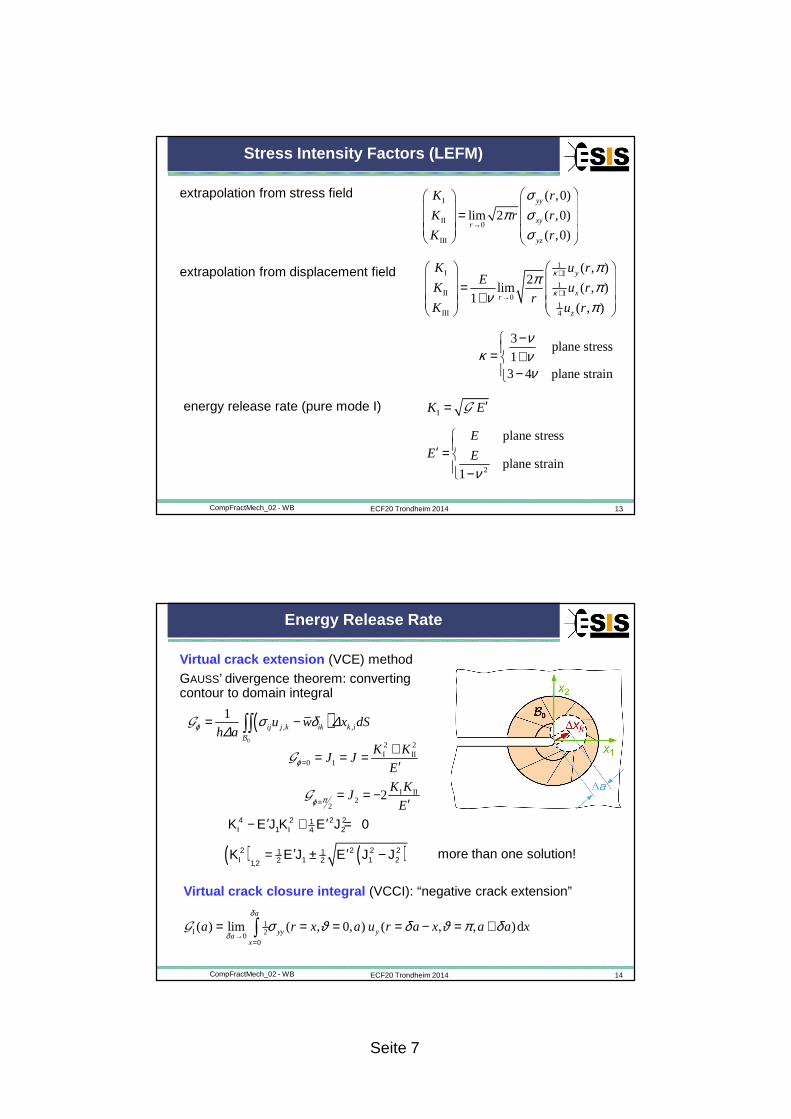
CTOA in FEM
• ABAQUS :*DEBOND*FRACTURE CRIT, TYPE=COD
• CTOA = COD / BL
• Base length BL = 1mm
• Linear 2D Plane Stress Elements
a
1/2 CTOAFE
node release
1/2 CTOAFE
1/2 CTODFE
base lengthFE
0,25mm
Simulation of crack extension by node release
As CTOA is dependent on base length (BL), it has to be uniquely defined in both testing and FE simulation
ECF20 Trondheim 2014 12CompFractMech_02 - WB
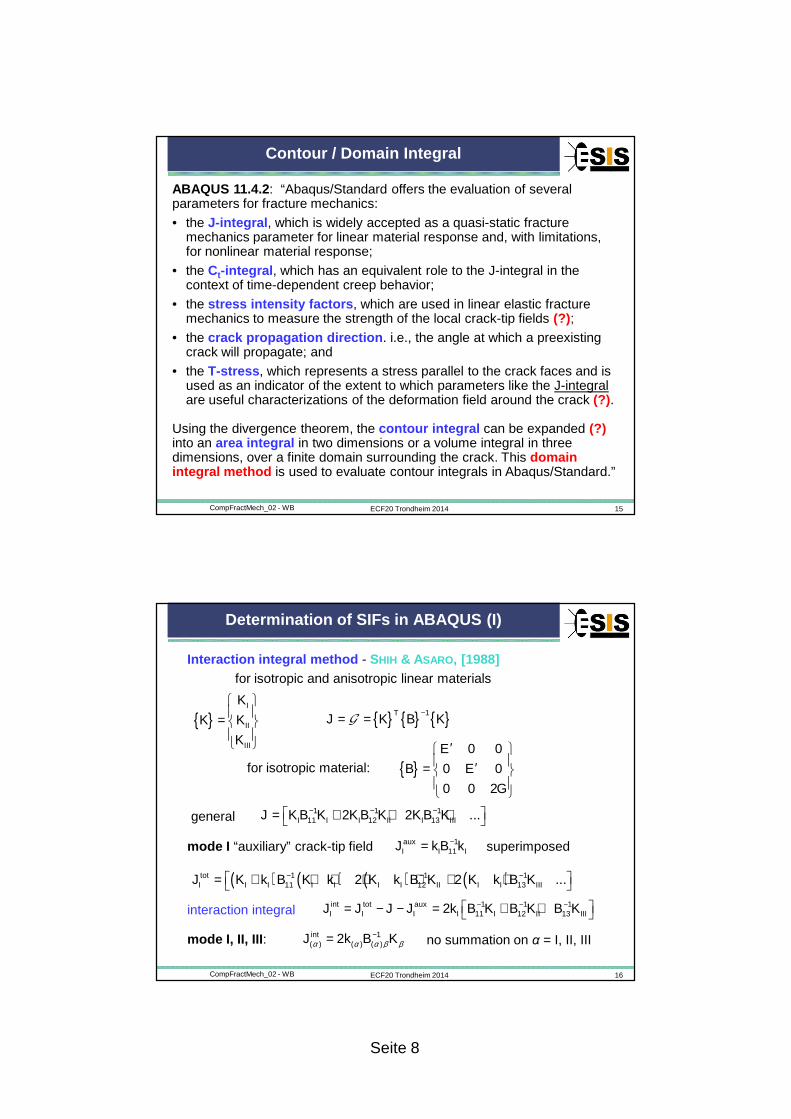
Results M(T)
Validation of ψR-curve
effect of base length
Seite 7
ECF20 Trondheim 2014 13CompFractMech_02 - WB
Stress Intensity Factors (LEFM)
3plane stress
13 4 plane strain
νκ ν
ν
−= + −
I
II0
III
( ,0)
lim 2 ( ,0)
( ,0)
σπ σ
σ→
=
yy
xyr
yz
K r
K r r
K r
extrapolation from stress field
1I 1
1II 10
1III 4
( , )2
lim ( , )1
( , )
κ
κ
ππ π
νπ
+
+→
= +
y
xr
z
K u rE
K u rr
K u r
extrapolation from displacement field
energy release rate (pure mode I)I ′=K EG
2
plane stress
plane strain1 ν
′ = −
EE E
ECF20 Trondheim 2014 14CompFractMech_02 - WB
Energy Release Rate
( )0
, ,
1ϕ σ δ ∆
∆= −∫∫ ij j k ik k iu w x dS
h aB
G
2 2I II
0 1ϕ=+= = =
′K K
J JE
G
I II2
22πϕ =
= = −′
K KJ
EG
Virtual crack extension (VCE) method
GAUSS’ divergence theorem: converting contour to domain integral
1I 20
0
( ) lim ( , 0, ) ( , , )dδ
δσ ϑ δ ϑ π δ
→=
= = = = − = +∫a
yy ya
x
a r x a u r a x a a xG
Virtual crack closure integral (VCCI): “negative crack extension”
4 2 2 21I 1 I 24 0K E J K E J′ ′− + =
( ) ( )2 2 2 21 1I 1 1 22 21,2
K E J E J J′ ′= ± − more than one solution!
Seite 8
ECF20 Trondheim 2014 15CompFractMech_02 - WB
Contour / Domain Integral
ABAQUS 11.4.2 : “Abaqus/Standard offers the evaluation of several parameters for fracture mechanics:
• the J-integral , which is widely accepted as a quasi-static fracture mechanics parameter for linear material response and, with limitations, for nonlinear material response;
• the Ct-integral , which has an equivalent role to the J-integral in the context of time-dependent creep behavior;
• the stress intensity factors , which are used in linear elastic fracture mechanics to measure the strength of the local crack-tip fields (?);
• the crack propagation direction . i.e., the angle at which a preexisting crack will propagate; and
• the T-stress , which represents a stress parallel to the crack faces and is used as an indicator of the extent to which parameters like the J-integral are useful characterizations of the deformation field around the crack (?).
Using the divergence theorem, the contour integral can be expanded (?) into an area integral in two dimensions or a volume integral in three dimensions, over a finite domain surrounding the crack. This domain integral method is used to evaluate contour integrals in Abaqus/Standard.”
ECF20 Trondheim 2014 16CompFractMech_02 - WB
Determination of SIFs in ABAQUS (I)
Interaction integral method - SHIH & ASARO, [1988]for isotropic and anisotropic linear materials
{ }I
II
III
K
K
K
K
=
{ } { } { }T 1K B KJ
−= =G
for isotropic material: { }0 0
B 0 0
0 0 2
E
E
G
′ ′=
general 1 1 1I 11 I I 12 II I 13 III2 2 ...J K B K K B K K B K− − − = + + +
superimposedmode I “auxiliary” crack-tip field aux 1I I 11 IJ k B k−=
( ) ( ) ( ) ( )tot 1 1 1I I I 11 I I I I 12 II I I 13 III2 2 ...J K k B K k K k B K K k B K− − − = + + + + + + +
interaction integral int tot aux 1 1 1I I I I 11 I 12 II 13 III2J J J J k B K B K B K− − − = − − = + +
mode I, II, III : int 1( ) ( ) ( )2J k B Kα α α β β
−= no summation on α = I, II, III
Seite 9
ECF20 Trondheim 2014 17CompFractMech_02 - WB
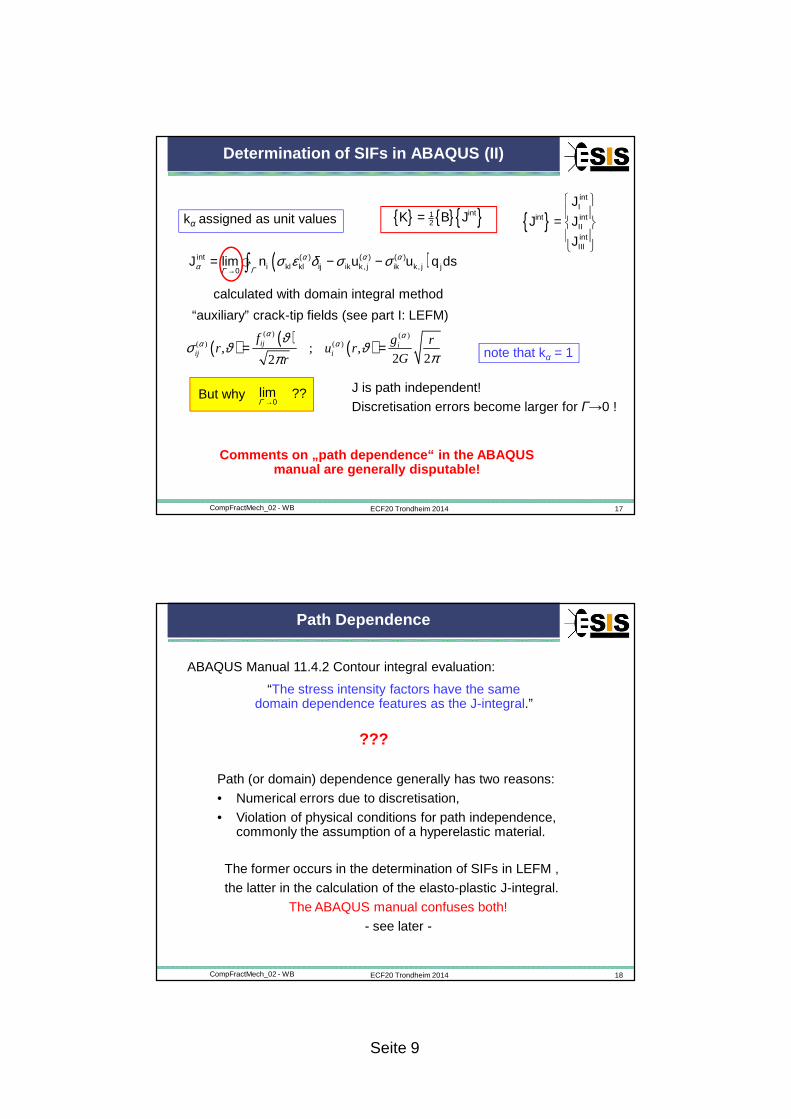
Determination of SIFs in ABAQUS (II)
( )int ( ) ( ) ( ), ,0
lim i kl kl ij ik k j ik k j jJ n u u q dsα α αα ΓΓ
σ ε δ σ σ→
= − −∫�
calculated with domain integral method
kα assigned as unit values { } { }{ }int12K B J= { }
intI
int intIIintIII
J
J
J
J
=
But why0
limΓ →
?? J is path independent!
Discretisation errors become larger for Γ→0 !
Comments on „path dependence“ in the ABAQUS manual are generally disputable!
“auxiliary” crack-tip fields (see part I: LEFM)
( ) ( ) ( )( ) ( )
( ) ( ), ; ,2 22
α αα αϑ
σ ϑ ϑππ
= =ij iij i
f g rr u r
Gr note that kα = 1
ECF20 Trondheim 2014 18CompFractMech_02 - WB
Path Dependence
“The stress intensity factors have the same domain dependence features as the J-integral.”
ABAQUS Manual 11.4.2 Contour integral evaluation:
???
Path (or domain) dependence generally has two reasons:
• Numerical errors due to discretisation,
• Violation of physical conditions for path independence, commonly the assumption of a hyperelastic material.
The former occurs in the determination of SIFs in LEFM ,
the latter in the calculation of the elasto-plastic J-integral.
The ABAQUS manual confuses both!
- see later -
Seite 10
ECF20 Trondheim 2014 19CompFractMech_02 - WB
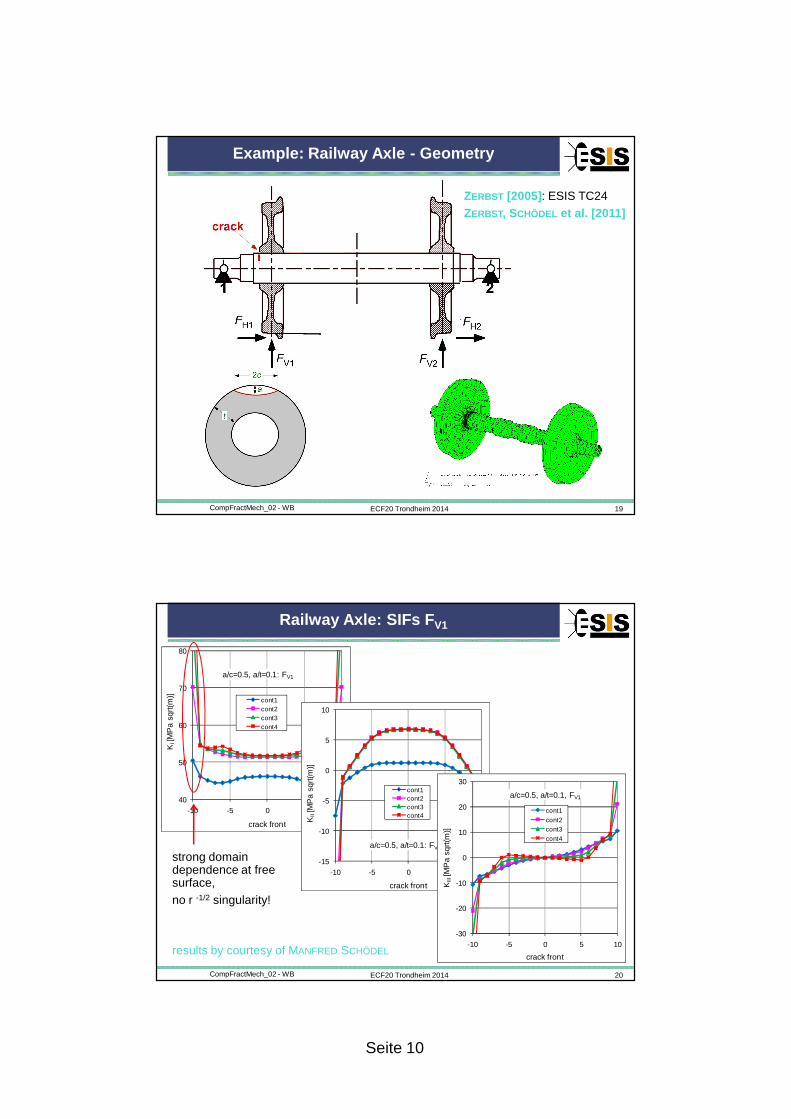
Example: Railway Axle - Geometry
ZERBST [2005]: ESIS TC24ZERBST, SCHÖDEL et al. [2011]
ECF20 Trondheim 2014 20CompFractMech_02 - WB
Railway Axle: SIFs FV1
40
50
60
70
80
-10 -5 0 5 10
KI[
MP
a sq
rt(m
)]
crack front
a/c=0.5, a/t=0.1: FV1
cont1cont2cont3cont4
-15
-10
-5
0
5
10
-10 -5 0 5 10
KII
[MP
a s
qrt(m
)]
crack front
a/c=0.5, a/t=0.1: FV1
cont1cont2cont3cont4
-30
-20
-10
0
10
20
30
-10 -5 0 5 10
KIII
[MP
a sq
rt(m
)]
crack front
a/c=0.5, a/t=0.1, FV1
cont1
cont2cont3
cont4
strong domain dependence at free surface,no r -1/2 singularity!
results by courtesy of MANFRED SCHÖDEL
Seite 11
ECF20 Trondheim 2014 21CompFractMech_02 - WB
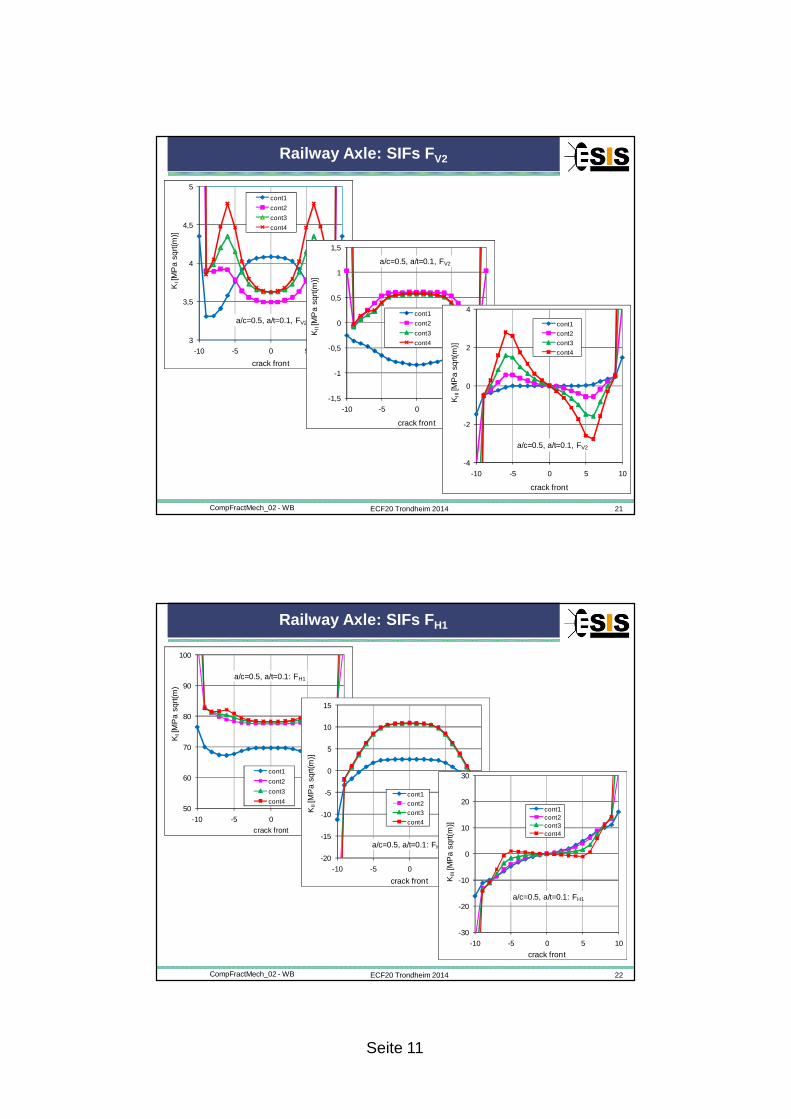
Railway Axle: SIFs FV2
3
3,5
4
4,5
5
-10 -5 0 5 10
KI[
MP
a sq
rt(m
)]
crack front
a/c=0.5, a/t=0.1, FV2
cont1
cont2
cont3
cont4
-1,5
-1
-0,5
0
0,5
1
1,5
-10 -5 0 5 10
KII
[MP
a sq
rt(m
)]
crack front
a/c=0.5, a/t=0.1, FV2
cont1
cont2
cont3
cont4
-4
-2
0
2
4
-10 -5 0 5 10
KIII
[MP
a sq
rt(m
)]
crack front
a/c=0.5, a/t=0.1, FV2
cont1
cont2
cont3
cont4
ECF20 Trondheim 2014 22CompFractMech_02 - WB
Railway Axle: SIFs FH1
50
60
70
80
90
100
-10 -5 0 5 10
KI[
MP
a sq
rt(m
)
crack front
a/c=0.5, a/t=0.1: FH1
cont1
cont2
cont3
cont4
-20
-15
-10
-5
0
5
10
15
-10 -5 0 5 10
KII
[MP
a sq
rt(m
)]
crack front
a/c=0.5, a/t=0.1: FH1
cont1cont2cont3
cont4
-30
-20
-10
0
10
20
30
-10 -5 0 5 10
KIII
[MP
a s
qrt(m
)]
crack front
a/c=0.5, a/t=0.1: FH1
cont1cont2cont3cont4
Seite 12
ECF20 Trondheim 2014 23CompFractMech_02 - WB
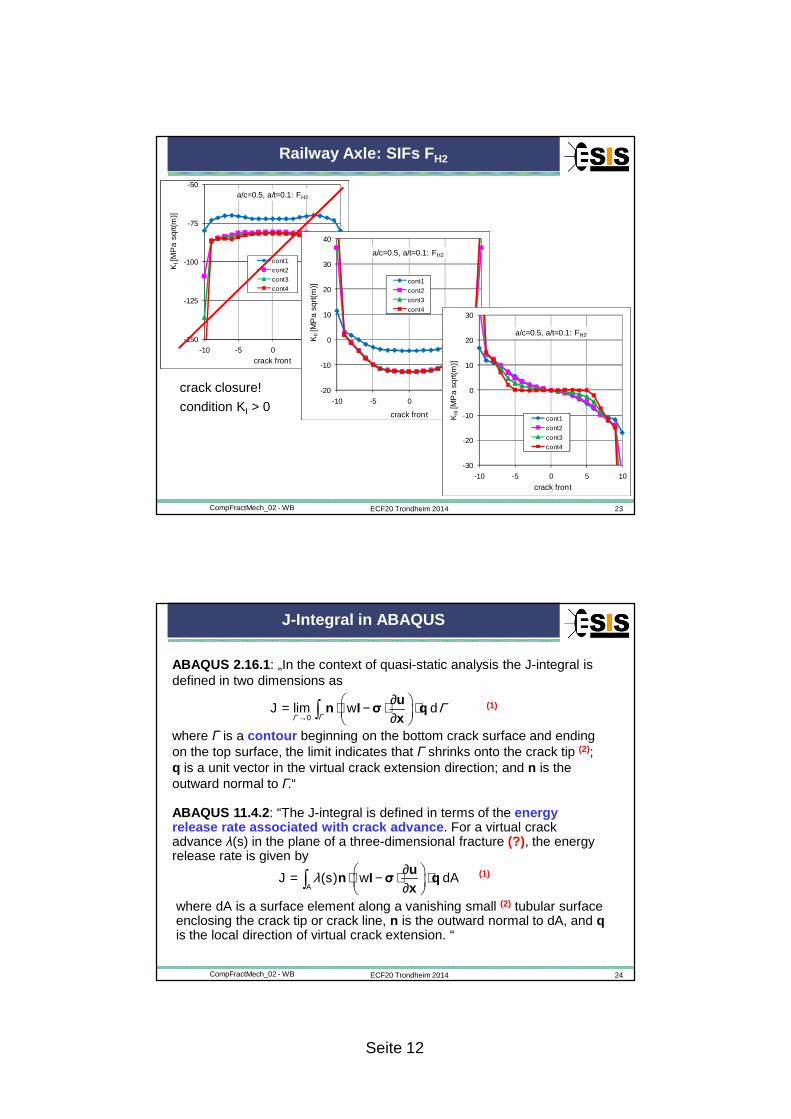
Railway Axle: SIFs FH2
-150
-125
-100
-75
-50
-10 -5 0 5 10
KI[
MP
a sq
rt(m
)]
crack front
a/c=0.5, a/t=0.1: FH2
cont1cont2cont3cont4
crack closure!
condition KI > 0-20
-10
0
10
20
30
40
-10 -5 0 5 10
KII
[MP
a sq
rt(m
)]
crack front
a/c=0.5, a/t=0.1: FH2
cont1
cont2
cont3
cont4
-30
-20
-10
0
10
20
30
-10 -5 0 5 10
KIII
[MP
a sq
rt(m
)]
crack front
a/c=0.5, a/t=0.1: FH2
cont1
cont2
cont3
cont4
ECF20 Trondheim 2014 24CompFractMech_02 - WB
J-Integral in ABAQUS
ABAQUS 11.4.2 : “The J-integral is defined in terms of the energy release rate associated with crack advance . For a virtual crack advance λ(s) in the plane of a three-dimensional fracture (?), the energy release rate is given by
where dA is a surface element along a vanishing small (2) tubular surface enclosing the crack tip or crack line, n is the outward normal to dA, and qis the local direction of virtual crack extension. “
( )A
J s w dAλ ∂ = ⋅ − ⋅ ⋅ ∂ ∫
un I σ q
x(1)
ABAQUS 2.16.1 : „In the context of quasi-static analysis the J-integral is defined in two dimensions as
where Γ is a contour beginning on the bottom crack surface and ending on the top surface, the limit indicates that Γ shrinks onto the crack tip (2); q is a unit vector in the virtual crack extension direction; and n is the outward normal to Γ.“
0limJ w d
ΓΓΓ
→
∂ = ⋅ − ⋅ ⋅ ∂ ∫
un I σ q
x(1)
Seite 13
ECF20 Trondheim 2014 25CompFractMech_02 - WB
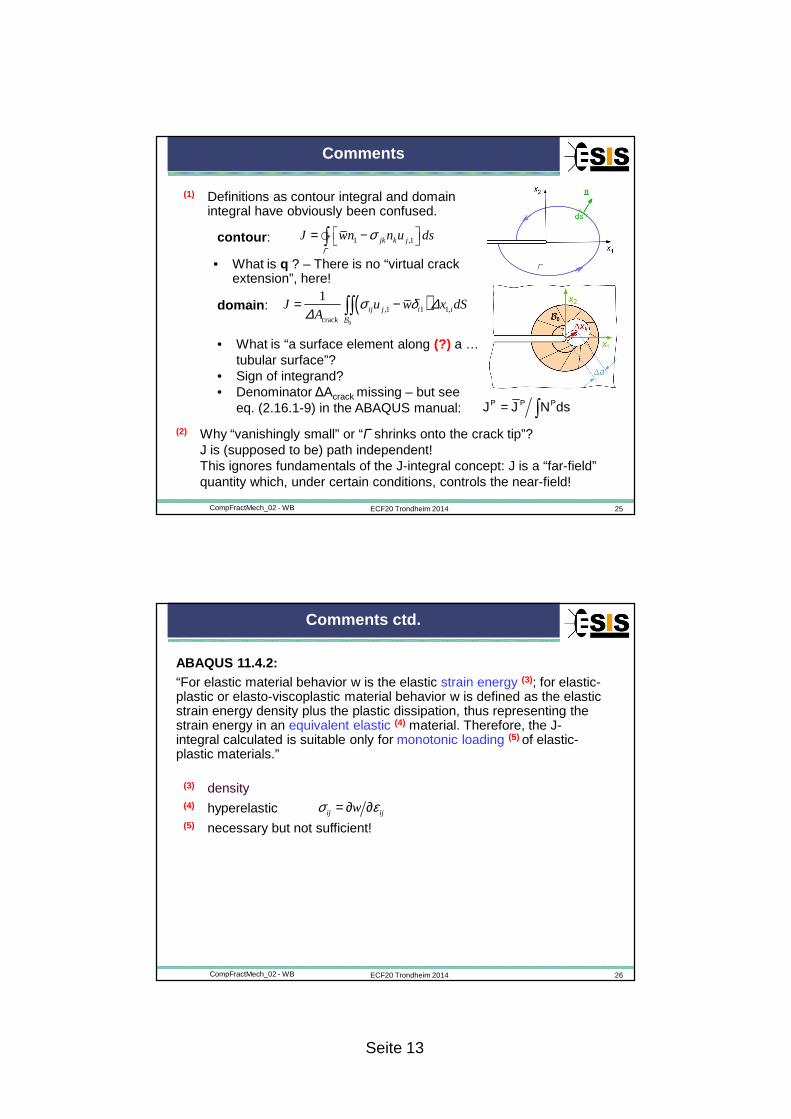
Comments
(1) Definitions as contour integral and domain integral have obviously been confused.
(2) Why “vanishingly small” or “Γ shrinks onto the crack tip”? J is (supposed to be) path independent! This ignores fundamentals of the J-integral concept: J is a “far-field” quantity which, under certain conditions, controls the near-field!
• What is q ? – There is no “virtual crack extension”, here!
1 ,1
Γ
σ = − ∫� jk k jJ wn n u dscontour :
• What is “a surface element along (?) a … tubular surface”?
• Sign of integrand?• Denominator ∆Acrack missing – but see
eq. (2.16.1-9) in the ABAQUS manual:
( )0
,1 1 1,crack
1 σ δ ∆∆
= −∫∫ ij j i iJ u w x dSA
B
domain :
P P PJ J N ds= ∫
ECF20 Trondheim 2014 26CompFractMech_02 - WB
Comments ctd.
ABAQUS 11.4.2:“For elastic material behavior w is the elastic strain energy (3); for elastic-plastic or elasto-viscoplastic material behavior w is defined as the elastic strain energy density plus the plastic dissipation, thus representing the strain energy in an equivalent elastic (4) material. Therefore, the J-integral calculated is suitable only for monotonic loading (5) of elastic-plastic materials.”
(3) density(4) hyperelastic(5) necessary but not sufficient!
σ ε= ∂ ∂ij ijw
Seite 14
ECF20 Trondheim 2014 27CompFractMech_02 - WB
Domain Dependence (1)
ABAQUS 11.4.2: “The J-integral should be independent of the domain used provided that the crack faces are parallel to each other (1), but J-integral estimates from different rings may vary because of the approximate nature of the finite element solution (2). Strong variation in these estimates, commonly called domain dependence or contour dependence, typically indicates an error in the contour integral definition (3) . Gradual variation (4) in these estimates may indicate that a finer mesh is needed or, if plasticity is included, that the contour integral domain does not completely include the plastic zone. If the “equivalent elastic (5) material” is not a good representation of the elastic-plastic material, the contour integrals will be domain independent only if they completely include the plastic zone. ...”
(1) This is one of several conditions!(2) This holds for LEFM (see above) but is not the main reason for contour
dependence of the elastic-plastic J(3) What kind of error? Or does this mean “violation of the assumptions
made for path independence”.(4) What is “strong” and what is “gradual”?(5) hyperelastic
ECF20 Trondheim 2014 28CompFractMech_02 - WB
Domain Dependence (2)
“... Since it is not always possible to include the plastic zone in three dimensions (6), a finer mesh may be the only solution (7). If the first contour integral is defined by specifying the nodes at the crack tip, the first few contours may be inaccurate (8). To check the accuracy (8) of these contours, you can request more contours and determine the value of the contour integral that appears approximately constant from one contour to the next. The contour integral values that are not approximately equal to this constant should be discarded . (9) “
(6) This may also occur in 2D under conditions of full yielding.(7) This is rubbish: (i) a fine mesh does not change the size of the plastic
zone; (ii) mesh refinement is commonly counterproductive in plasticity and may make things worse!
(8) This is not a question of (numerical) accuracy but of physics, i.e. energy dissipation in plasticity!
(9) Absolutely! It indicates that a “far-field” value of J has been reached which corresponds to the value determined from the load-displacement curve.
W. BROCKS & I. SCHEIDER: Materialprüfung 45 (2003), 264-275.
Seite 15
ECF20 Trondheim 2014 29CompFractMech_02 - WB
J Calculation
ABAQUS/Standard uses the domain integral method to evaluate the J-integral and automatically finds the elements that form each ring from the regions defined as the crack tip or crack line.
Each contour provides an evaluation of the contour integral. The number , n, of contours must be specified in the history output request.
*CONTOUR INTEGRAL, CONTOURS=n, TYPE=J
• Defining the crack front
• Specifying the virtual crack extension direction
ECF20 Trondheim 2014 30CompFractMech_02 - WB
Defining the Crack Front
*CONTOUR INTEGRAL, CONTOURS=n, CRACK TIP NODESSpecify the crack front node set name and the crack tip node number or node set name.
The user must specify the crack front , i.e., the region that defines the first contour . ABAQUS/Standard uses this region and one layer of elements surrounding it to compute the first contour integral. An additional layer of elements is used to compute each subsequent contour. The crack front can be equal to the crack tip in two dimensions or it can be a larger region surrounding the crack tip, in which case it must include the crack tip. By default ABAQUS defines the crack tip as the node specified for the crack front in the so called CRACK TIP NODES option of the contour integral command:
Alternatively, a user-defined node set which include the crack tip can be provided to ABAQUS manually by omitting the crack tip nodes option:
*CONTOUR INTEGRAL, CONTOURS=nSpecify the crack front node set name and the crack tip node number or node set name.
Seite 16
ECF20 Trondheim 2014 31CompFractMech_02 - WB
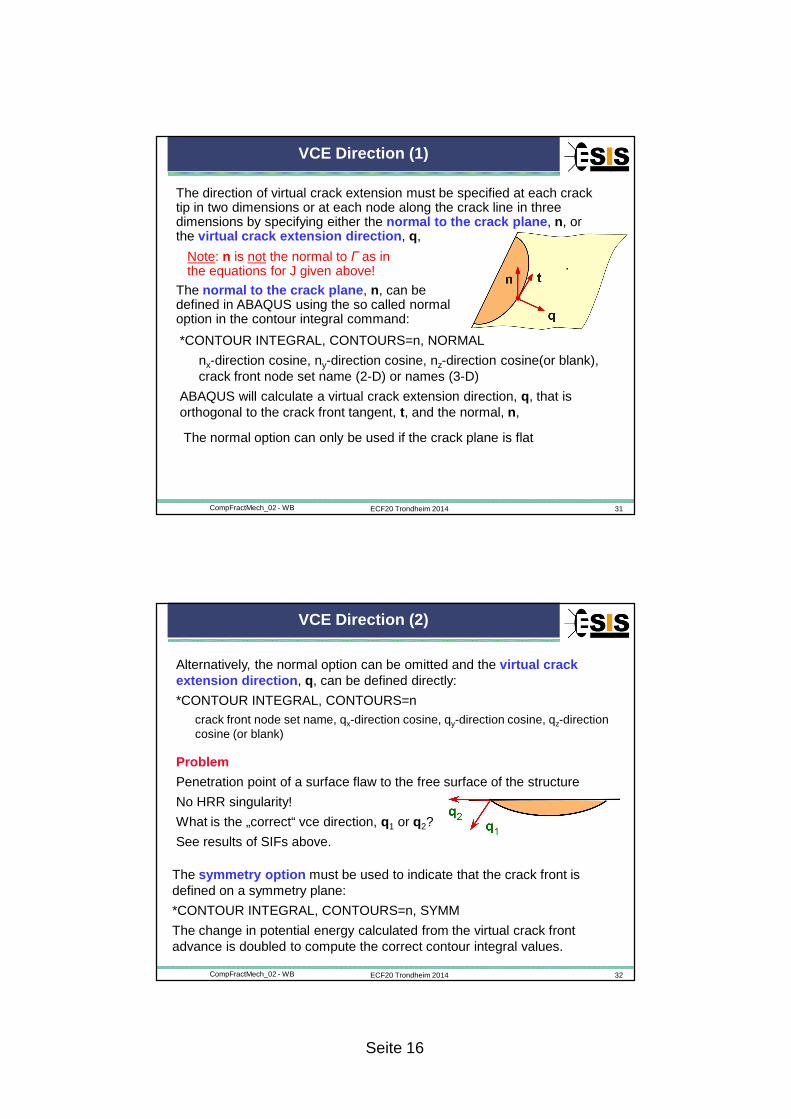
VCE Direction (1)
The direction of virtual crack extension must be specified at each crack tip in two dimensions or at each node along the crack line in three dimensions by specifying either the normal to the crack plane , n, or the virtual crack extension direction , q,
Note: n is not the normal to Γ as in the equations for J given above!
*CONTOUR INTEGRAL, CONTOURS=n, NORMAL
nx-direction cosine, ny-direction cosine, nz-direction cosine(or blank), crack front node set name (2-D) or names (3-D)
ABAQUS will calculate a virtual crack extension direction, q, that is orthogonal to the crack front tangent, t, and the normal, n,
The normal to the crack plane , n, can be defined in ABAQUS using the so called normal option in the contour integral command:
The normal option can only be used if the crack plane is flat
ECF20 Trondheim 2014 32CompFractMech_02 - WB
VCE Direction (2)
Alternatively, the normal option can be omitted and the virtual crack extension direction , q, can be defined directly:
*CONTOUR INTEGRAL, CONTOURS=ncrack front node set name, qx-direction cosine, qy-direction cosine, qz-direction cosine (or blank)
The symmetry option must be used to indicate that the crack front is defined on a symmetry plane:
*CONTOUR INTEGRAL, CONTOURS=n, SYMM
The change in potential energy calculated from the virtual crack front advance is doubled to compute the correct contour integral values.
Problem
Penetration point of a surface flaw to the free surface of the structure
No HRR singularity!
What is the „correct“ vce direction, q1 or q2?
See results of SIFs above.
Seite 17
ECF20 Trondheim 2014 33CompFractMech_02 - WB
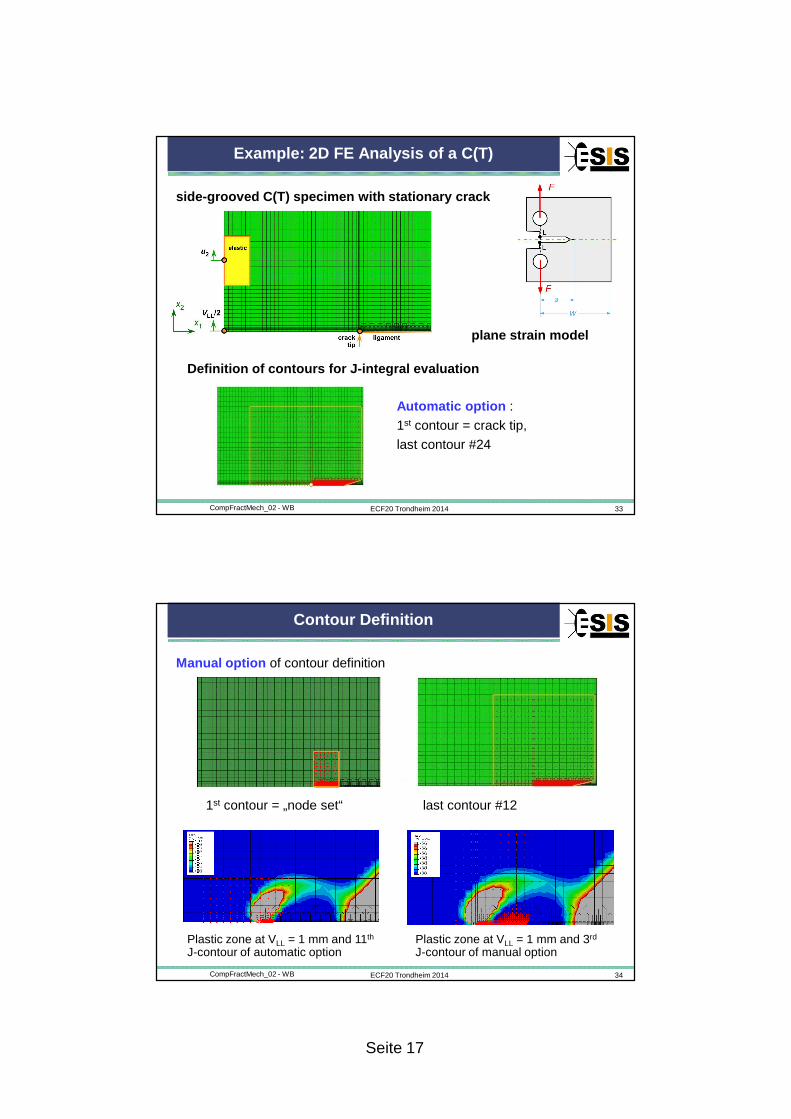
Example: 2D FE Analysis of a C(T)
side-grooved C(T) specimen with stationary crack
plane strain model
Definition of contours for J-integral evaluation
Automatic option :
1st contour = crack tip,
last contour #24
ECF20 Trondheim 2014 34CompFractMech_02 - WB
Contour Definition
1st contour = „node set“
Manual option of contour definition
last contour #12
Plastic zone at VLL = 1 mm and 11th
J-contour of automatic option Plastic zone at VLL = 1 mm and 3rd
J-contour of manual option
Seite 18
ECF20 Trondheim 2014 35CompFractMech_02 - WB
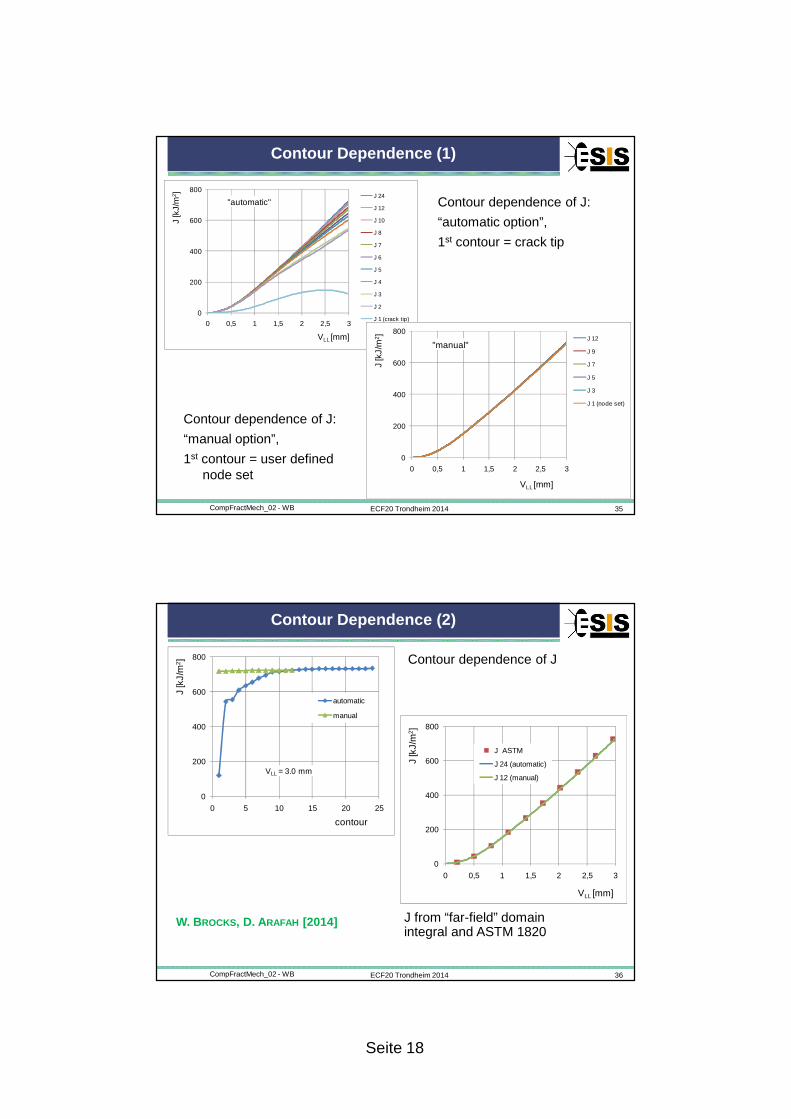
Contour Dependence (1)
Contour dependence of J:
“automatic option”,
1st contour = crack tip
Contour dependence of J:
“manual option”,
1st contour = user defined node set
0
200
400
600
800
0 0,5 1 1,5 2 2,5 3
J [k
J/m
2 ]
VLL [mm]
"automatic"J 24
J 12
J 10
J 8
J 7
J 6
J 5
J 4
J 3
J 2
J 1 (crack tip)
0
200
400
600
800
0 0,5 1 1,5 2 2,5 3
J [k
J/m
2 ]
VLL [mm]
"manual"J 12
J 9
J 7
J 5
J 3
J 1 (node set)
ECF20 Trondheim 2014 36CompFractMech_02 - WB
Contour Dependence (2)
W. BROCKS, D. ARAFAH [2014]
0
200
400
600
800
0 5 10 15 20 25
J[k
J/m
2]
contour
VLL = 3.0 mm
automatic
manual
J from “far-field” domain integral and ASTM 1820
0
200
400
600
800
0 0,5 1 1,5 2 2,5 3
J [k
J/m
2]
VLL [mm]
J_ASTM
J 24 (automatic)
J 12 (manual)
Contour dependence of J
Seite 19
ECF20 Trondheim 2014 37CompFractMech_02 - WB
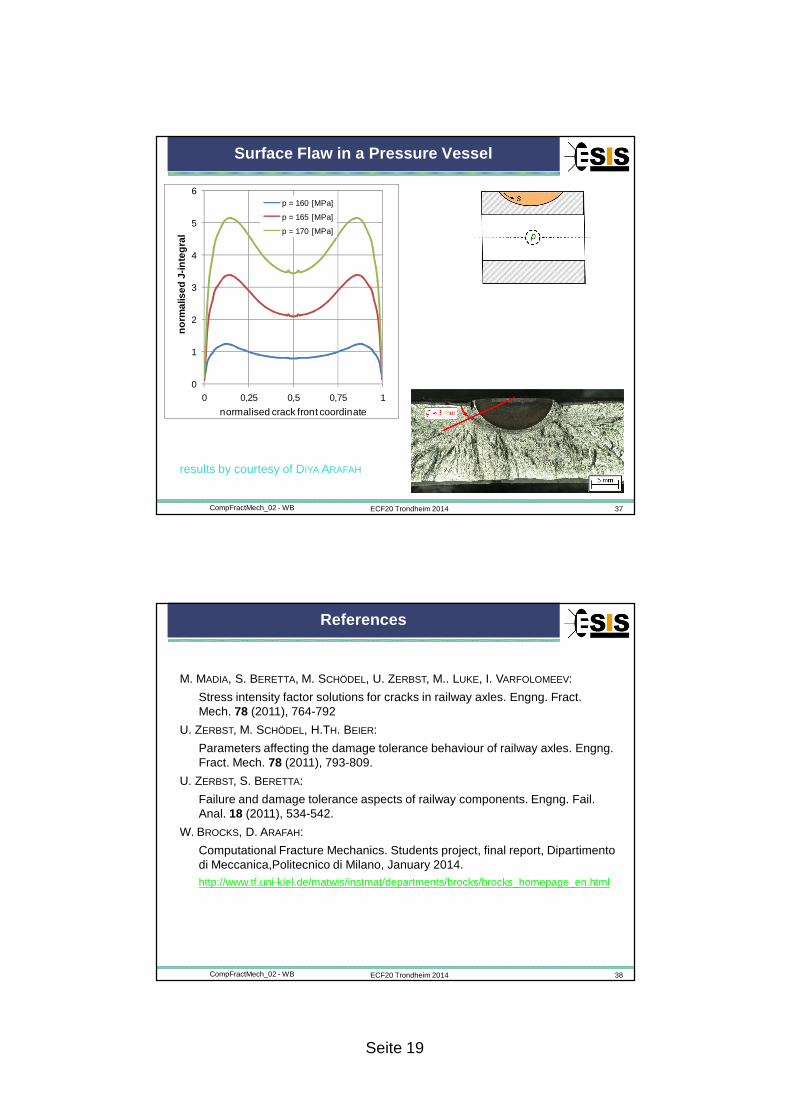
Surface Flaw in a Pressure Vessel
0
1
2
3
4
5
6
0 0,25 0,5 0,75 1
norm
alis
ed J
-inte
gral
normalised crack front coordinate
p = 160 [MPa]
p = 165 [MPa]
p = 170 [MPa]
results by courtesy of DIYA ARAFAH
ECF20 Trondheim 2014 38CompFractMech_02 - WB
References
M. MADIA, S. BERETTA, M. SCHÖDEL, U. ZERBST, M.. LUKE, I. VARFOLOMEEV:
Stress intensity factor solutions for cracks in railway axles. Engng. Fract. Mech. 78 (2011), 764-792
U. ZERBST, M. SCHÖDEL, H.TH. BEIER:
Parameters affecting the damage tolerance behaviour of railway axles. Engng. Fract. Mech. 78 (2011), 793-809.
U. ZERBST, S. BERETTA:
Failure and damage tolerance aspects of railway components. Engng. Fail. Anal. 18 (2011), 534-542.
W. BROCKS, D. ARAFAH:
Computational Fracture Mechanics. Students project, final report, Dipartimentodi Meccanica,Politecnico di Milano, January 2014.http://www.tf.uni-kiel.de/matwis/instmat/departments/brocks/brocks_homepage_en.html
Seite 1
Computational Fracture Mechanics
Part III: The Cohesive Model
Wolfgang Brocks
Christian Albrecht University , Kiel (Germany)Materials Mechanics
(1) Background - Fundamentals(2) The Traction-Separation Law(3) Examples, Applications(4) Cohesive Elements in ABAQUS
ECF20 Trondheim 2014 2CompFractMech_02 - WB
Simulation of Crack Extension
� Morphological
� Node release + fracture mechanics criterion (R-curve)
� no splitting of dissipation into global plasticity and local separation
� Cohesive surface
� Interface elements with traction-separation law responsible for local separation
� Continuum damage mechanics
� Unified constitutive equations for deformation and damage, e.g. porous metal plasticity
Seite 2
ECF20 Trondheim 2014 3CompFractMech_02 - WB
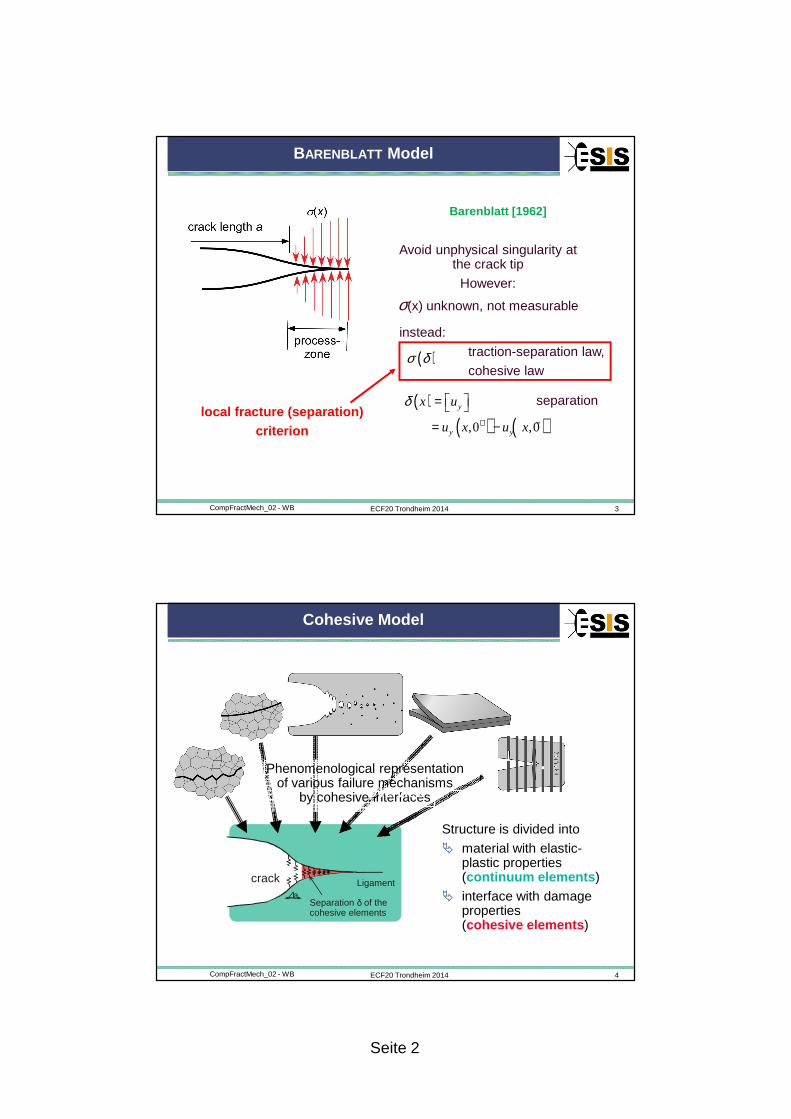
BARENBLATT Model
Barenblatt [1962]
Avoid unphysical singularity at the crack tip
However:
σ(x) unknown, not measurable
traction-separation law,
cohesive law
( )( ) ( ),0 ,0
y
y y
x u
u x u x
δ =
= −+ −
instead:
( )σ δ
separationlocal fracture (separation)
criterion
ECF20 Trondheim 2014 4CompFractMech_02 - WB
Cohesive Model
Structure is divided into
� material with elastic-plastic properties (continuum elements )
� interface with damage properties (cohesive elements )
∆a
crack Ligament
Separation δ of the cohesive elements
Phenomenological representation of various failure mechanisms
by cohesive interfacesOverview
Seite 3
ECF20 Trondheim 2014 5CompFractMech_02 - WB
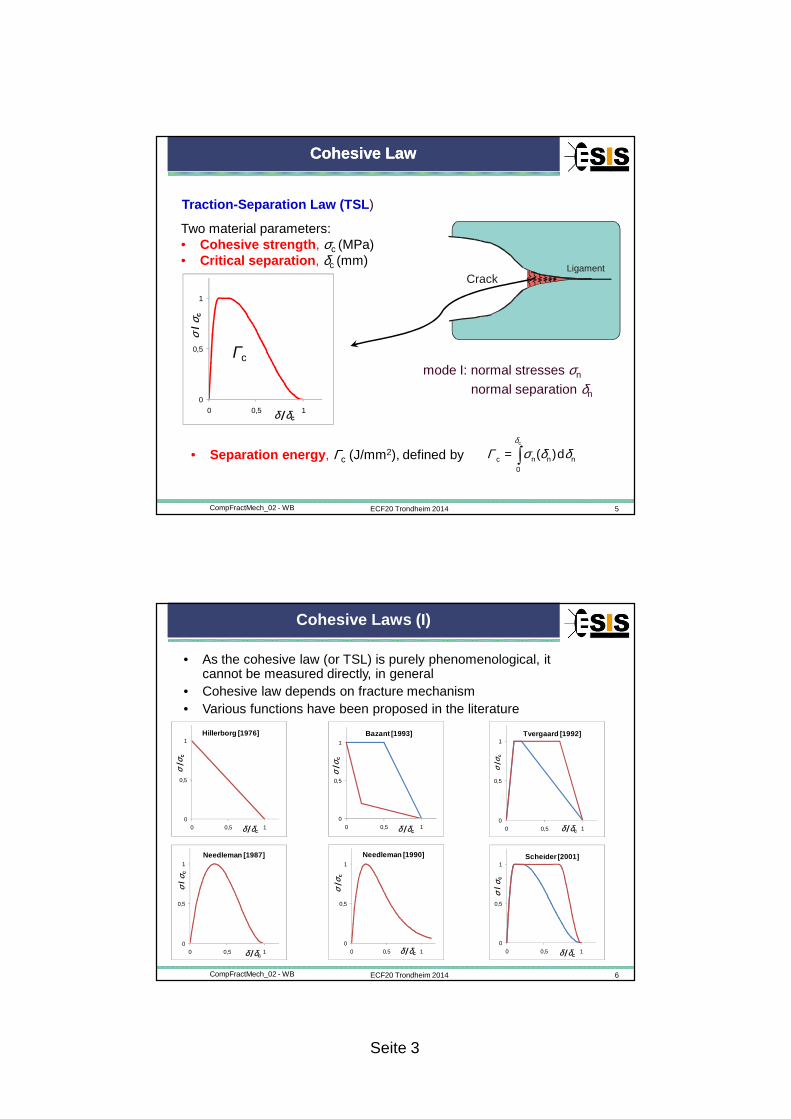
Cohesive LawCohesive Law
CrackLigament
Two material parameters:• Cohesive strength , σc (MPa)• Critical separation , δc (mm)
δ
Γ σ δ δ= ∫c
c n n n0
( )d• Separation energy , Γc (J/mm2), defined by
mode I: normal stresses σn
normal separation δn
Traction-Separation Law (TSL )
0
0,5
1
0 0,5 1
σ/ σ
c
δ /δc
Γc
ECF20 Trondheim 2014 6CompFractMech_02 - WB
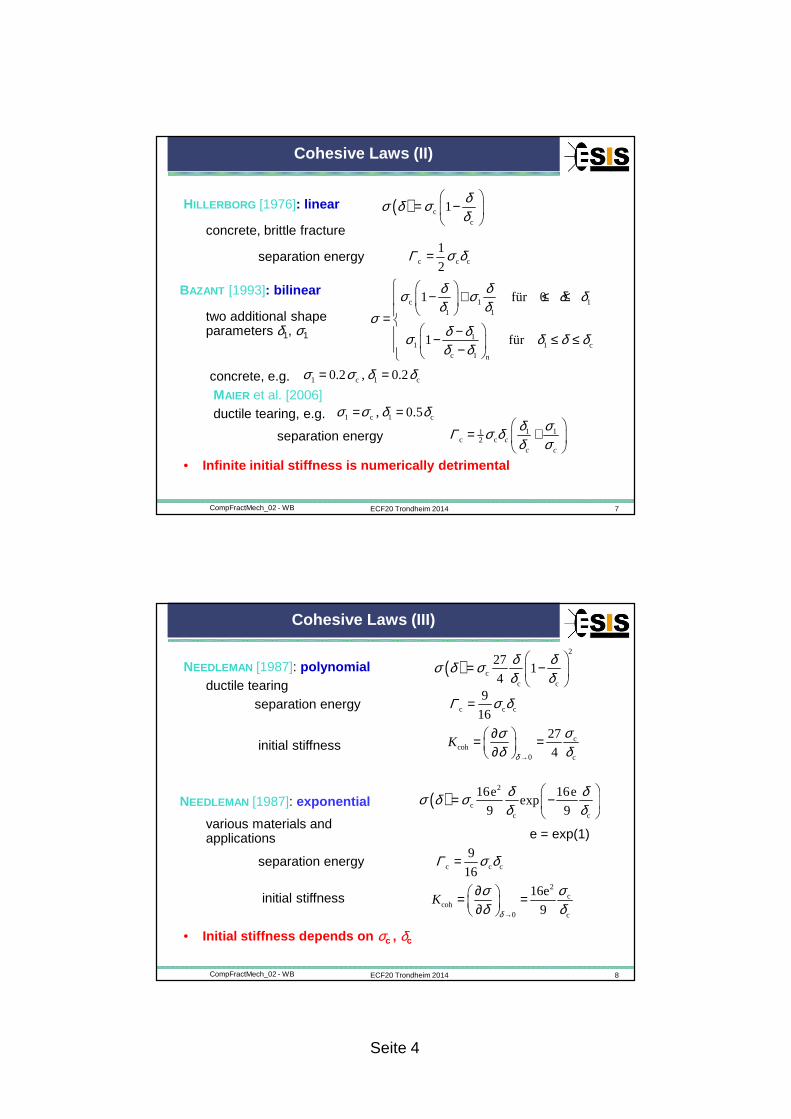
Cohesive Laws (I)
• As the cohesive law (or TSL) is purely phenomenological, it cannot be measured directly, in general
• Cohesive law depends on fracture mechanism• Various functions have been proposed in the literature
0
0,5
1
0 0,5 1
σ/ σ
c
δ /δc
Hillerborg [1976]
0
0,5
1
0 0,5 1
σ/ σ
c
δ /δc
Bazant [1993]
0
0,5
1
0 0,5 1
σ/ σ
c
δ /δc
Tvergaard [1992]
0
0,5
1
0 0,5 1
σ / σ
c
δ /δc
Needleman [1987]
0
0,5
1
0 0,5 1
σ/ σ
c
δ /δc
Needleman [1990]
0
0,5
1
0 0,5 1
σ/ σ
c
δ /δc
Scheider [2001]
Seite 4
ECF20 Trondheim 2014 7CompFractMech_02 - WB
Cohesive Laws (II)
• Infinite initial stiffness is numerically detriment al
( ) cc
1δσ δ σδ
= −
c c c
1
2Γ σ δ=
HILLERBORG [1976]: linear
concrete, brittle fracture
separation energy
1 c 1 c, 0.5σ σ δ δ= =ductile tearing, e.g.
c 1 11 1
11 1 c
c 1 n
1 für 0
1 für
δ δσ σ δ δδ δ
σδ δσ δ δ δδ δ
− + ≤ ≤
= − − ≤ ≤ −
two additional shape parameters δ1, σ1
BAZANT [1993]: bilinear
1 c 1 c0.2 , 0.2σ σ δ δ= =concrete, e.g.MAIER et al. [2006]
1 11c c2 c
c c
δ σΓ σ δδ σ
= +
separation energy
ECF20 Trondheim 2014 8CompFractMech_02 - WB
Cohesive Laws (III)
• Initial stiffness depends on σc , δc
ductile tearing( )
2
cc c
271
4
δ δσ δ σδ δ
= −
NEEDLEMAN [1987]: polynomial
c c c
9
16Γ σ δ=separation energy
ccoh
0 c
27
4δ
σσδ δ→
∂ = = ∂ Kinitial stiffness
NEEDLEMAN [1987]: exponential ( )2
cc c
16e 16eexp
9 9
δ δσ δ σδ δ
= −
e = exp(1)various materials and applications
c c c
9
16Γ σ δ=separation energy
2c
coh0 c
16e
9δ
σσδ δ→
∂ = = ∂ Kinitial stiffness
Seite 5
ECF20 Trondheim 2014 9CompFractMech_02 - WB
Cohesive Laws (IV)
Two additional shape parameters δ1 and δ 2
Various fracture phenomena depending on δ2
• Initial stiffness is determined by δ1
TVERGAARD & HUTCHINSON [1992]: trilinear
( )( )
( )
1
c
c 2
1
c 1 2
2 c
1
δδ
δ δδ δ
δ δ
σ δ σ δ δ δ
δ δ δ−−
≤= ≤ ≤ ≤ ≤
1 21c c c2
c c
1δ δΓ σ δδ δ
= − +
ccoh
0 1δ
σσδ δ→
∂ = = ∂ K
( )( ) ( )
( ) ( )
1 1
2 2
c 2 c 2
2
1
c 1 2
3 2
2 c
2
1
1 2 3
δ δδ δ
δ δ δ δδ δ δ δ
δ δ
σ δ σ δ δ δ
δ δ δ− −− −
− ≤= ≤ ≤
+ − ≤ ≤
1 21c c c2
c c
21
3
δ δΓ σ δδ δ
= − +
SCHEIDER [2001]: piecewise polynomial
ccoh
0 1
2
δ
σσδ δ→
∂ = = ∂ K
ECF20 Trondheim 2014 10CompFractMech_02 - WB
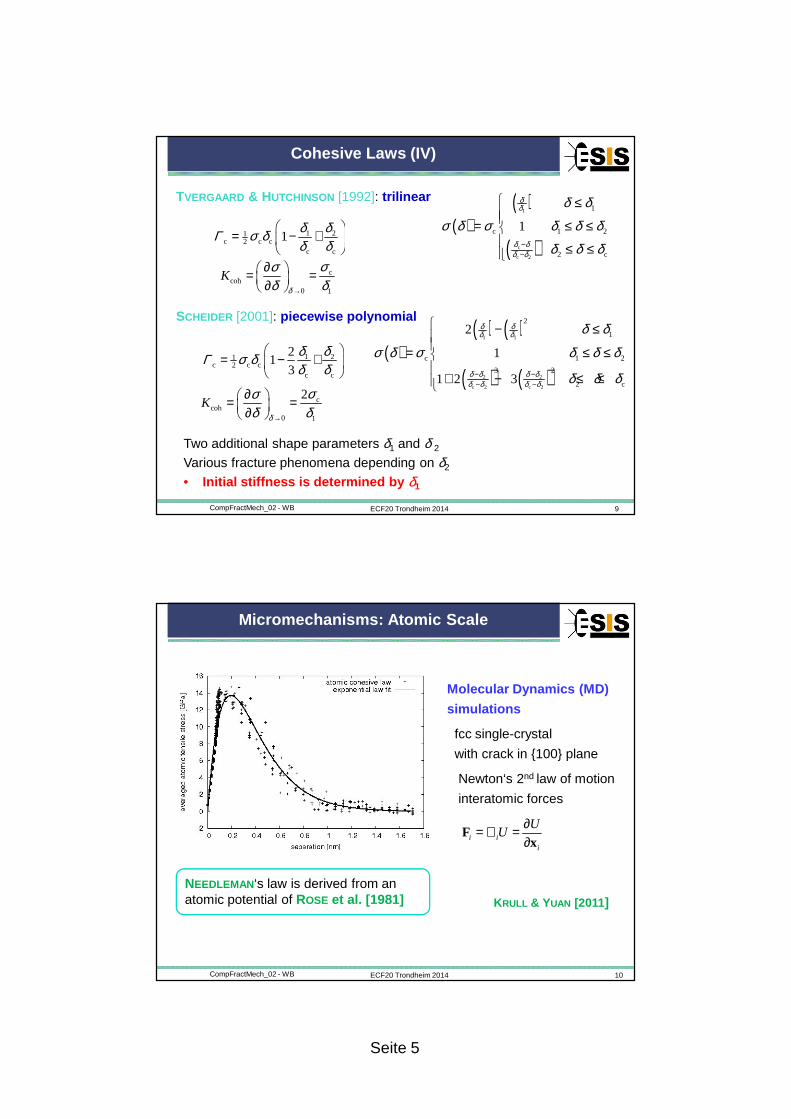
Micromechanisms: Atomic Scale
Molecular Dynamics (MD)
simulations
fcc single-crystal
with crack in {100} plane
KRULL & YUAN [2011]
Newton‘s 2nd law of motion
interatomic forces
i ii
UU
∂= =∂
Fx
∇
NEEDLEMAN ‘s law is derived from an atomic potential of ROSE et al. [1981]
Seite 6
ECF20 Trondheim 2014 11CompFractMech_02 - WB
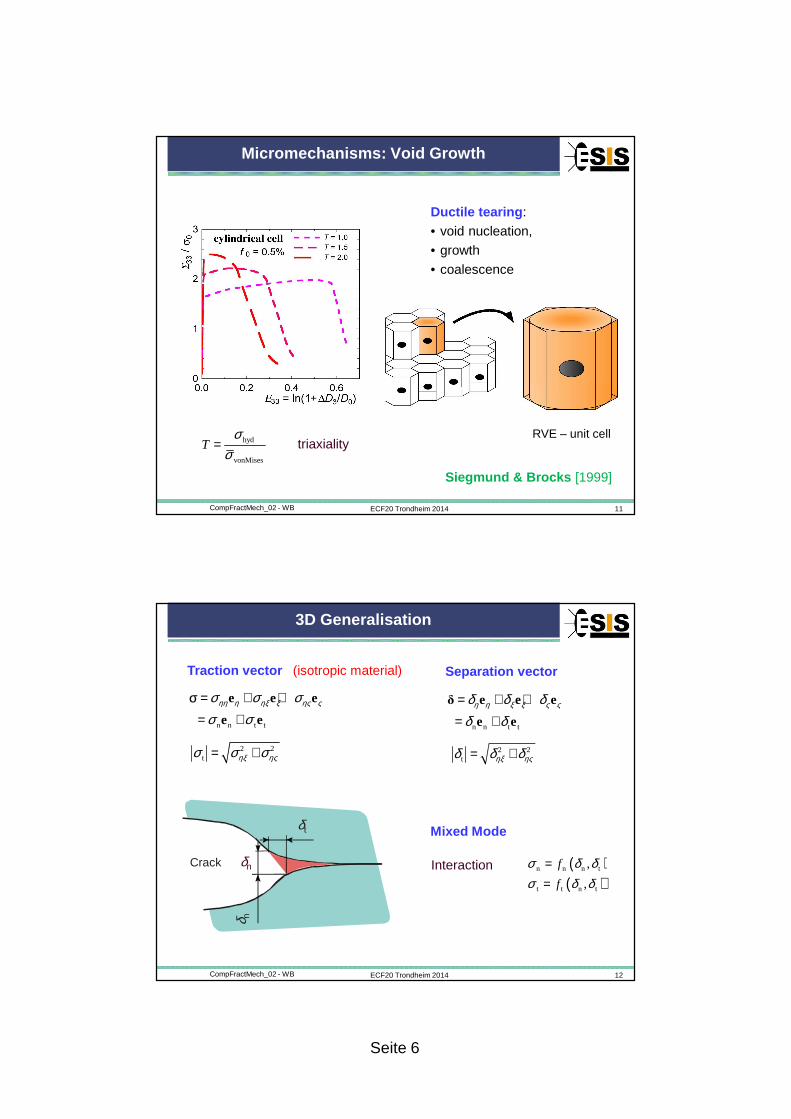
Micromechanisms: Void Growth
Ductile tearing :
• void nucleation,
• growth
• coalescence
RVE – unit cellhyd
vonMises
σσ
=T triaxiality
Siegmund & Brocks [1999]
ECF20 Trondheim 2014 12CompFractMech_02 - WB
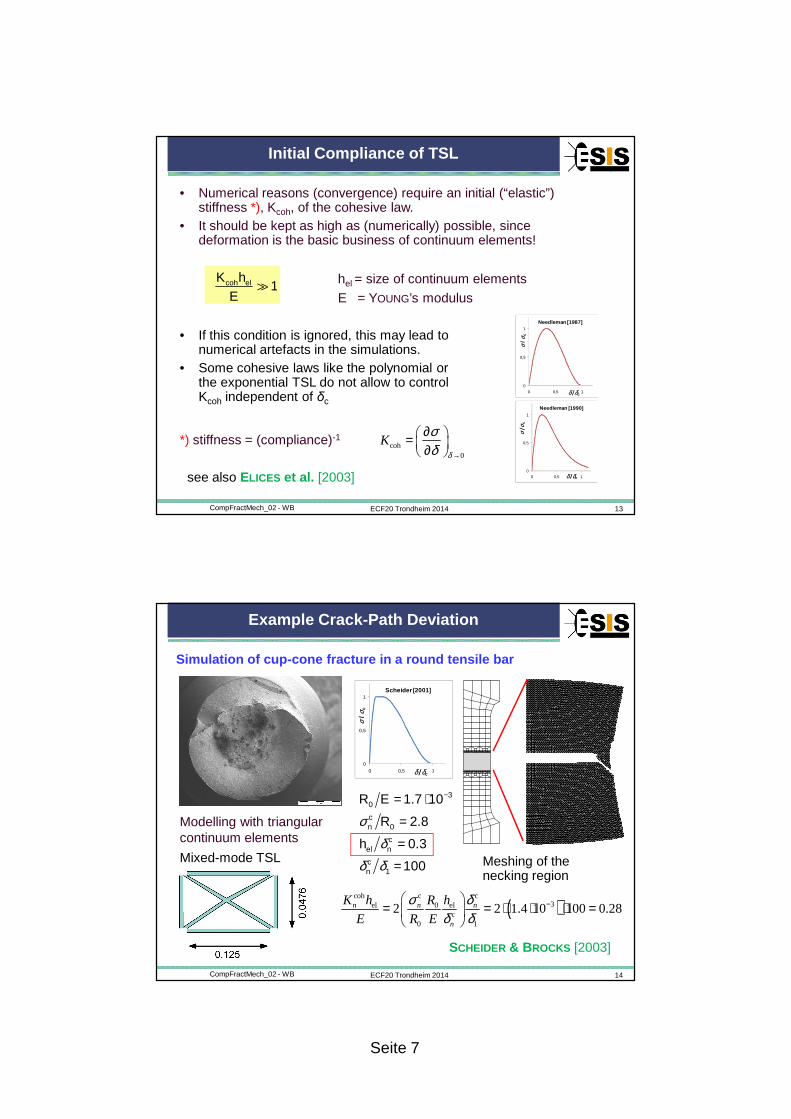
3D Generalisation
Traction vector
n n t t
ηη η ηξ ξ ης ςσ σ σσ σ
= + +
= +
e e e
e e
σ
(isotropic material)
2 2t ηξ ηςσ σ σ= +
Separation vector
n n t t
η η ξ ξ ς ςδ δ δδ δ
= + +
= +
δ e e e
e e
2 2t ηξ ηςδ δ δ= +
Crack
δt
δ n
δn Interaction ( )( )
n n n t
t t n t
,
,
f
f
σ δ δσ δ δ
==
Mixed Mode
Seite 7
ECF20 Trondheim 2014 13CompFractMech_02 - WB
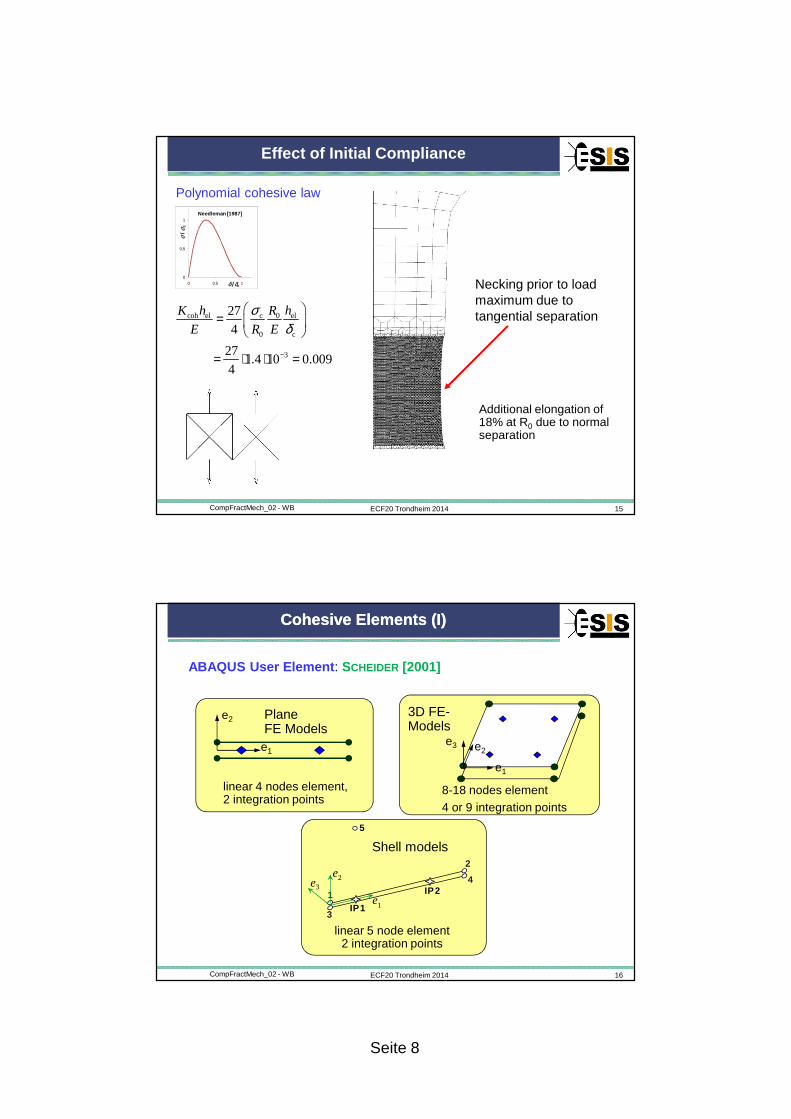
Initial Compliance of TSL
• Numerical reasons (convergence) require an initial (“elastic”) stiffness *), Kcoh, of the cohesive law.
• It should be kept as high as (numerically) possible, since deformation is the basic business of continuum elements!
• If this condition is ignored, this may lead to numerical artefacts in the simulations.
• Some cohesive laws like the polynomial or the exponential TSL do not allow to control Kcoh independent of δc
hel = size of continuum elements
E = YOUNG’s moduluscoh el 1
K hE
≫
*) stiffness = (compliance)-1coh
0δ
σδ →
∂ = ∂ K
0
0,5
1
0 0,5 1
σ/ σ
c
δ /δc
Needleman [1990]
0
0,5
1
0 0,5 1
σ / σ
c
δ /δc
Needleman [1987]
see also ELICES et al. [2003]
ECF20 Trondheim 2014 14CompFractMech_02 - WB
Example Crack-Path Deviation
Simulation of cup-cone fracture in a round tensile bar
Meshing of the necking region
SCHEIDER & BROCKS [2003]
Modelling with triangular continuum elements
Mixed-mode TSL
( )coh c c
3el 0 elc
0 1
2 2 1.4 10 100 0.28σ δ
δ δ−
= = ⋅ ⋅ ⋅ =
n n n
n
K h R h
E R E
0
0,5
1
0 0,5 1
σ/ σ
c
δ /δc
Scheider [2001]
30
c0
cel
c1
1.7 10
2.8
0.3
100
n
n
n
R E
R
h
σδ
δ δ
−= ⋅
=
=
=
Seite 8
ECF20 Trondheim 2014 15CompFractMech_02 - WB
Effect of Initial Compliance
Additional elongation of 18% at R0 due to normal separation
Necking prior to load maximum due to tangential separation
Polynomial cohesive law
0
0,5
1
0 0,5 1
σ / σ
c
δ /δc
Needleman [1987]
coh el c 0 el
0 c
3
27
4
271.4 10 0.009
4
σδ
−
=
= ⋅ ⋅ =
K h R h
E R E
ECF20 Trondheim 2014 16CompFractMech_02 - WB
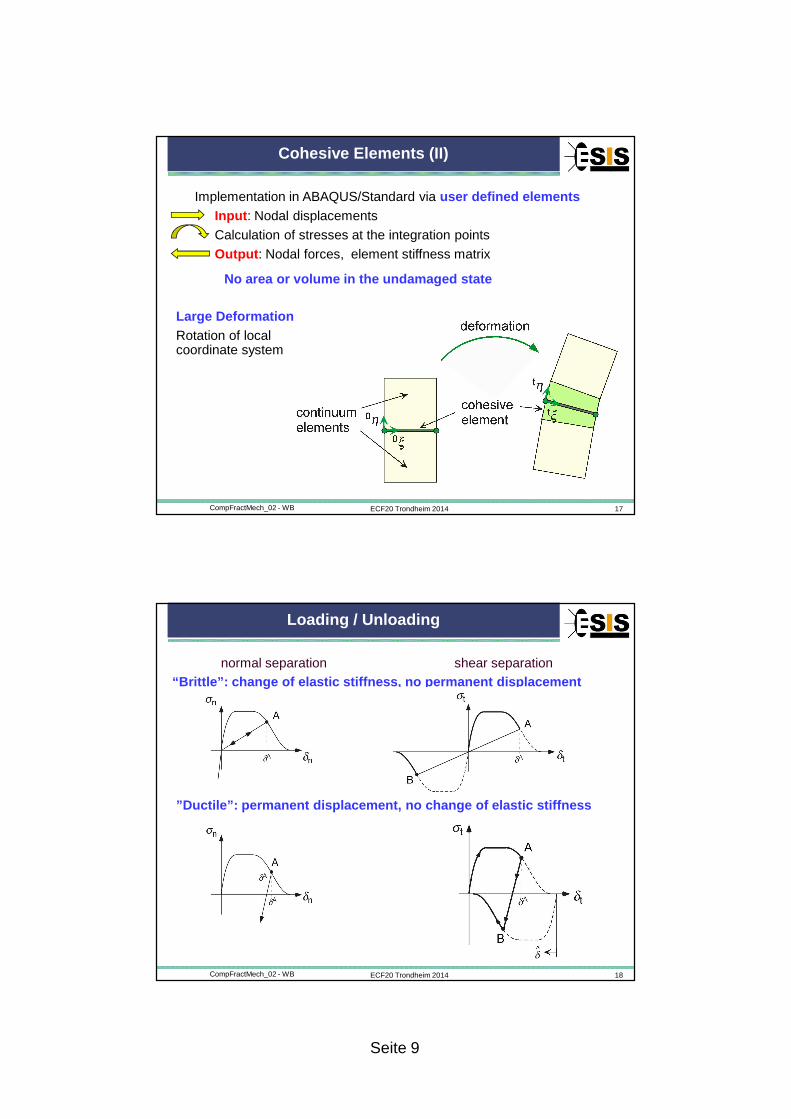
Cohesive Elements (I)Cohesive Elements (I)
Plane FE Models
e1
e2
linear 4 nodes element, 2 integration points
3D FE-Models
e1
e2e3
8-18 nodes element 4 or 9 integration points
1
2
3
4
IP1
IP2e1
e2e3
5
Shell models
linear 5 node element2 integration points
ABAQUS User Element : SCHEIDER [2001]
Seite 9
ECF20 Trondheim 2014 17CompFractMech_02 - WB
Cohesive Elements (II)
Implementation in ABAQUS/Standard via user defined elementsInput : Nodal displacements
Calculation of stresses at the integration points
Output : Nodal forces, element stiffness matrix
No area or volume in the undamaged state
Large DeformationRotation of local coordinate system
ECF20 Trondheim 2014 18CompFractMech_02 - WB
Loading / Unloading
“Brittle”: change of elastic stiffness, no permanen t displacementnormal separation shear separation
”Ductile”: permanent displacement, no change of ela stic stiffness
Seite 10
ECF20 Trondheim 2014 19CompFractMech_02 - WB
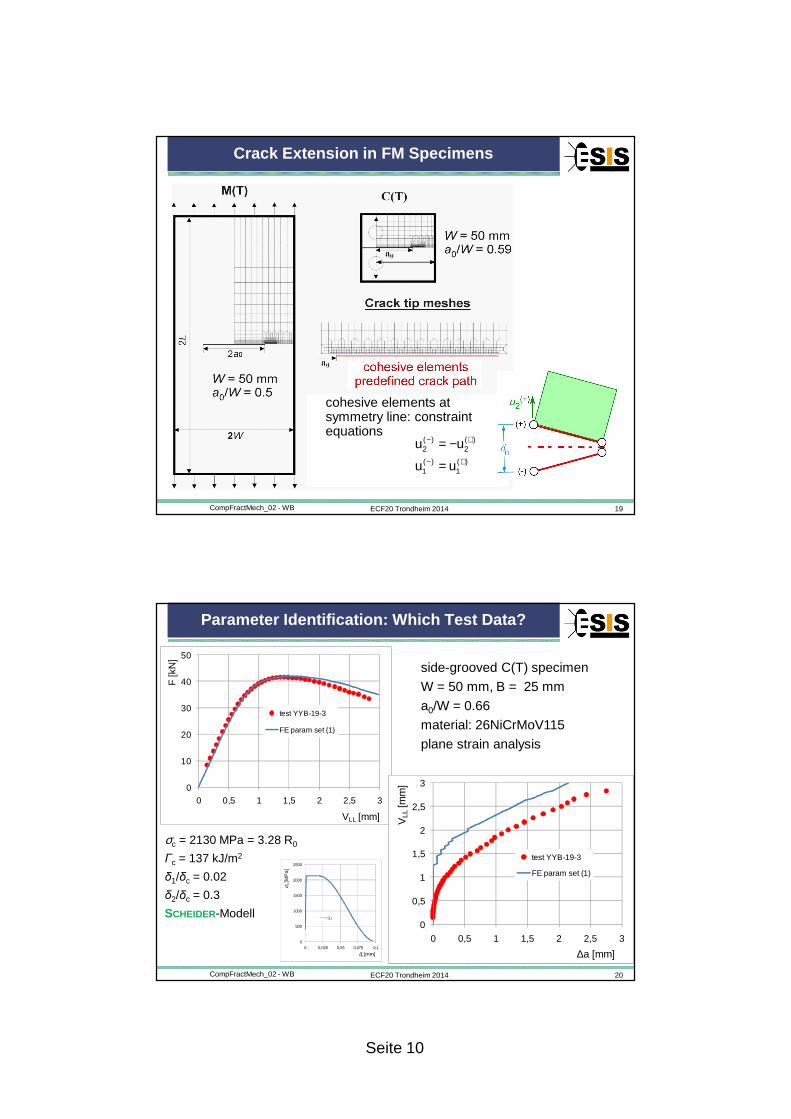
Crack Extension in FM Specimens
cohesive elements at symmetry line: constraint equations
( ) ( )2 2
( ) ( )1 1
u u
u u
− +
− +
= −
=
ECF20 Trondheim 2014 20CompFractMech_02 - WB
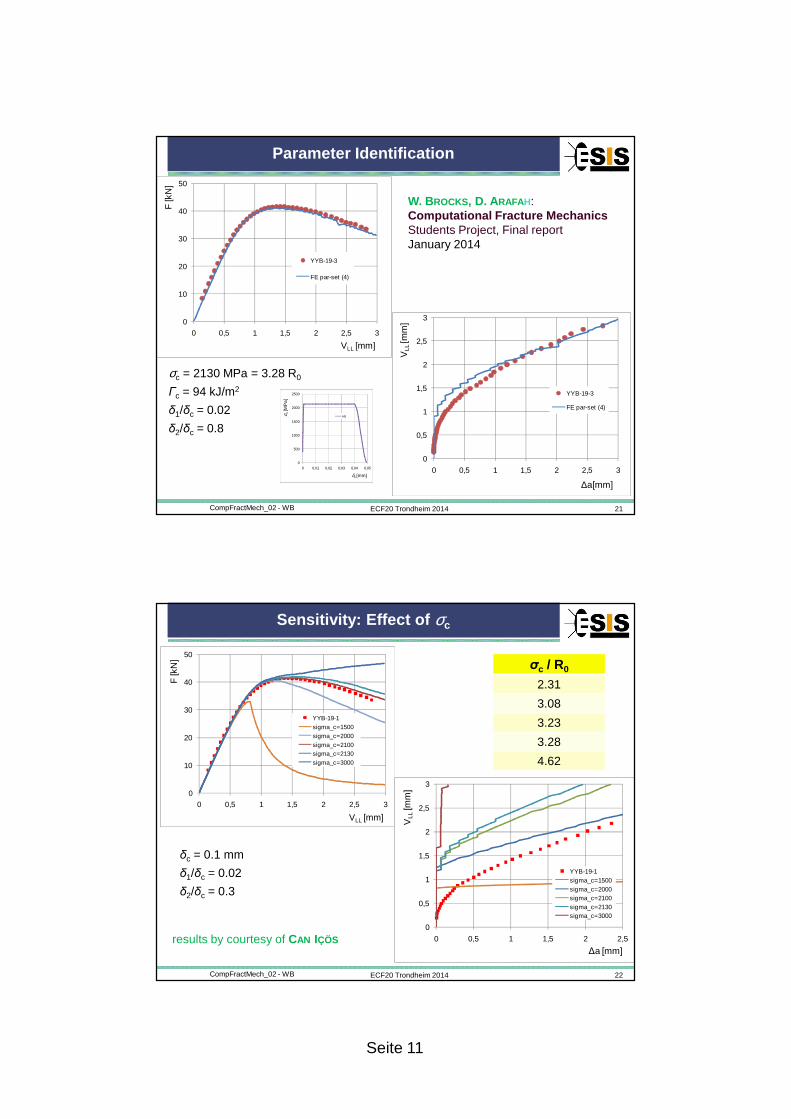
Parameter Identification: Which Test Data?
side-grooved C(T) specimen
W = 50 mm, B = 25 mm
a0/W = 0.66
material: 26NiCrMoV115
plane strain analysis
σc = 2130 MPa = 3.28 R0
Γc = 137 kJ/m2
δ1/δc = 0.02
δ2/δc = 0.3
SCHEIDER-Modell
0
10
20
30
40
50
0 0,5 1 1,5 2 2,5 3
F[k
N]
VLL [mm]
test YYB-19-3
FE param set (1)
0
0,5
1
1,5
2
2,5
3
0 0,5 1 1,5 2 2,5 3
VLL
[mm
]
∆a [mm]
test YYB-19-3
FE param set (1)
0
500
1000
1500
2000
2500
0 0,025 0,05 0,075 0,1
σ n[M
Pa]
δn [mm]
(1)
Seite 11
ECF20 Trondheim 2014 21CompFractMech_02 - WB
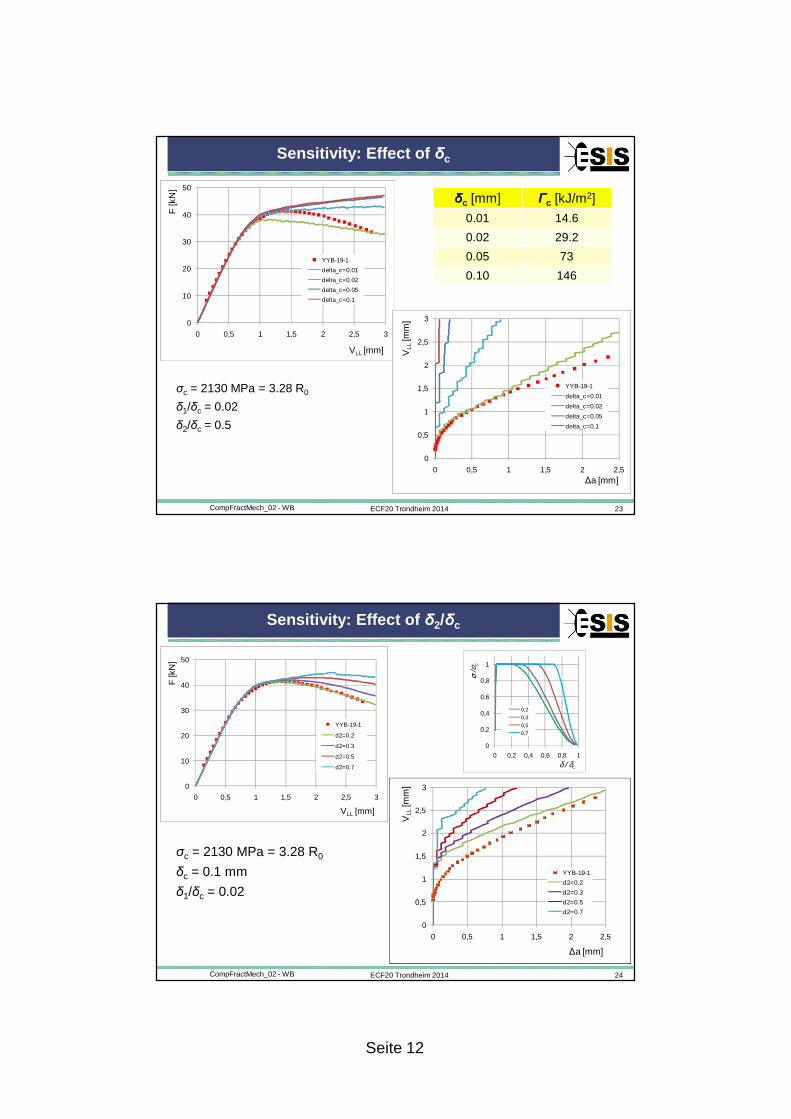
Parameter Identification
0
10
20
30
40
50
0 0,5 1 1,5 2 2,5 3
F[k
N]
VLL [mm]
YYB-19-3
FE par-set (4)
0
0,5
1
1,5
2
2,5
3
0 0,5 1 1,5 2 2,5 3
VLL
[mm
]
∆a[mm]
YYB-19-3
FE par-set (4)
σc = 2130 MPa = 3.28 R0
Γc = 94 kJ/m2
δ1/δc = 0.02
δ2/δc = 0.8
W. BROCKS, D. ARAFAH:Computational Fracture MechanicsStudents Project, Final reportJanuary 2014
0
500
1000
1500
2000
2500
0 0,01 0,02 0,03 0,04 0,05
σ n[M
Pa
]
δn [mm]
(4)
ECF20 Trondheim 2014 22CompFractMech_02 - WB
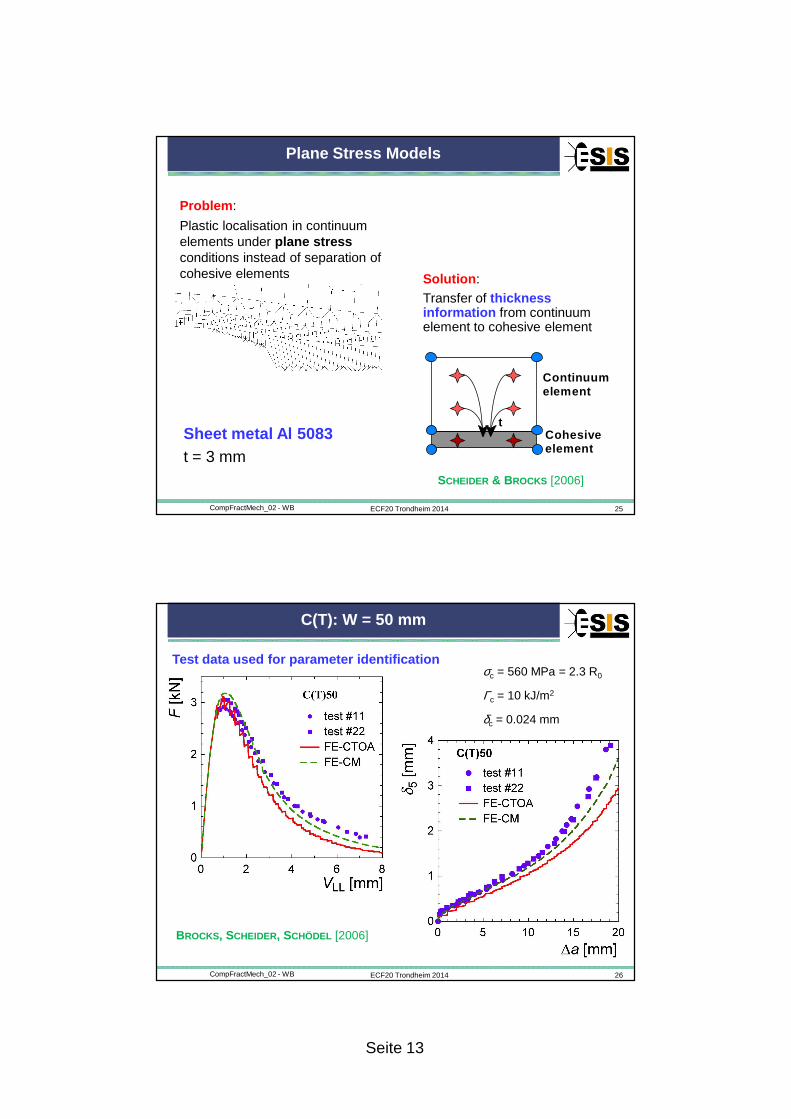
Sensitivity: Effect of σc
0
10
20
30
40
50
0 0,5 1 1,5 2 2,5 3
F[k
N]
VLL [mm]
YYB-19-1sigma_c=1500sigma_c=2000sigma_c=2100sigma_c=2130sigma_c=3000
0
0,5
1
1,5
2
2,5
3
0 0,5 1 1,5 2 2,5
VLL
[mm
]
∆a [mm]
YYB-19-1sigma_c=1500sigma_c=2000sigma_c=2100sigma_c=2130sigma_c=3000
δc = 0.1 mm
δ1/δc = 0.02
δ2/δc = 0.3
results by courtesy of CAN IÇÖS
σc / R0
2.31
3.08
3.23
3.28
4.62
Seite 12
ECF20 Trondheim 2014 23CompFractMech_02 - WB
Sensitivity: Effect of δc
0
10
20
30
40
50
0 0,5 1 1,5 2 2,5 3
F[k
N]
VLL [mm]
YYB-19-1
delta_c=0.01
delta_c=0.02
delta_c=0.05
delta_c=0.1
0
0,5
1
1,5
2
2,5
3
0 0,5 1 1,5 2 2,5
VLL
[mm
]
∆a [mm]
YYB-19-1
delta_c=0.01
delta_c=0.02
delta_c=0.05
delta_c=0.1
σc = 2130 MPa = 3.28 R0
δ1/δc = 0.02
δ2/δc = 0.5
δc [mm] Γc [kJ/m2]
0.01 14.6
0.02 29.2
0.05 73
0.10 146
ECF20 Trondheim 2014 24CompFractMech_02 - WB
Sensitivity: Effect of δ2/δc
0
10
20
30
40
50
0 0,5 1 1,5 2 2,5 3
F[k
N]
VLL [mm]
YYB-19-1
d2=0.2
d2=0.3
d2=0.5
d2=0.7
0
0,5
1
1,5
2
2,5
3
0 0,5 1 1,5 2 2,5
VL
L[m
m]
∆a [mm]
YYB-19-1
d2=0.2
d2=0.3
d2=0.5
d2=0.7
σc = 2130 MPa = 3.28 R0
δc = 0.1 mm
δ1/δc = 0.02
0
0,2
0,4
0,6
0,8
1
0 0,2 0,4 0,6 0,8 1
σ/σ
c
δ / δc
0,2
0,3
0,5
0,7
Seite 13
ECF20 Trondheim 2014 25CompFractMech_02 - WB
Plane Stress Models
Continuumelement
Cohesiveelement
t
Solution :
Transfer of thickness information from continuum element to cohesive element
Problem :
Plastic localisation in continuum elements under plane stressconditions instead of separation of cohesive elements
Sheet metal Al 5083t = 3 mm
SCHEIDER & BROCKS [2006]
ECF20 Trondheim 2014 26CompFractMech_02 - WB
C(T): W = 50 mm
Test data used for parameter identificationσc = 560 MPa = 2.3 R0
Γc = 10 kJ/m2
δc = 0.024 mm
BROCKS, SCHEIDER, SCHÖDEL [2006]
Seite 14
ECF20 Trondheim 2014 27CompFractMech_02 - WB
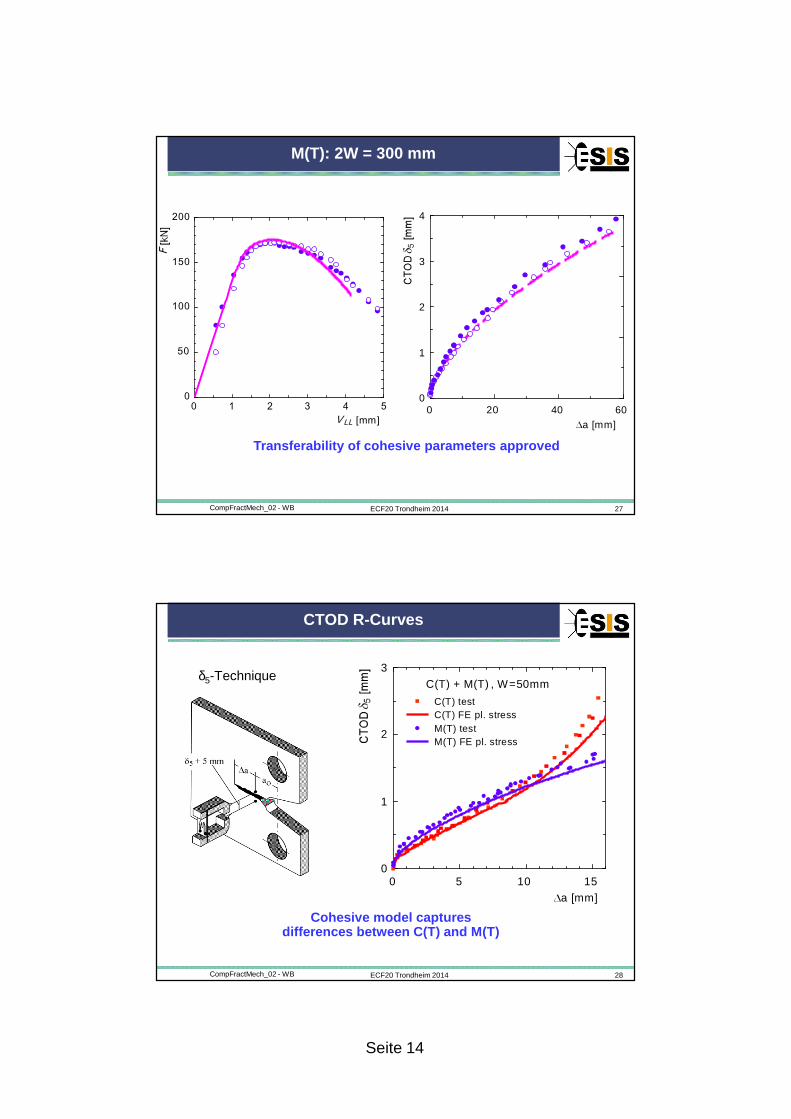
M(T): 2W = 300 mm
0 1 2 3 4 50
50
100
150
200
V LL [mm]0 20 40 60
0
1
2
3
4
a [mm]
Transferability of cohesive parameters approved
ECF20 Trondheim 2014 28CompFractMech_02 - WB
CTOD R-Curves
δ5-Technique
0 5 10 150
1
2
3
a [mm]
C(T) + M(T) , W=50mm
C(T) testC(T) FE pl. stressM(T) testM(T) FE pl. stress
Cohesive model captures differences between C(T) and M(T)
Seite 15
ECF20 Trondheim 2014 29CompFractMech_02 - WB
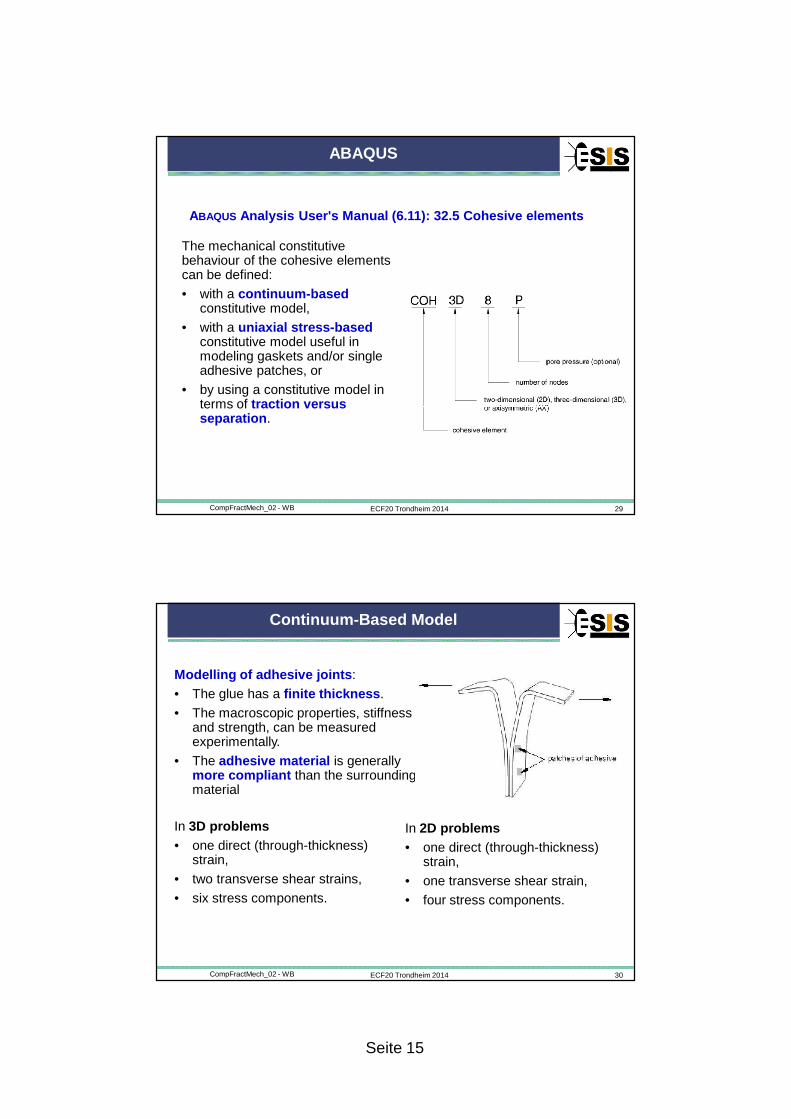
ABAQUS
ABAQUS Analysis User's Manual (6.11): 32.5 Cohesive elemen ts
The mechanical constitutive behaviour of the cohesive elements can be defined:
• with a continuum-basedconstitutive model,
• with a uniaxial stress-basedconstitutive model useful in modeling gaskets and/or single adhesive patches, or
• by using a constitutive model in terms of traction versus separation .
ECF20 Trondheim 2014 30CompFractMech_02 - WB
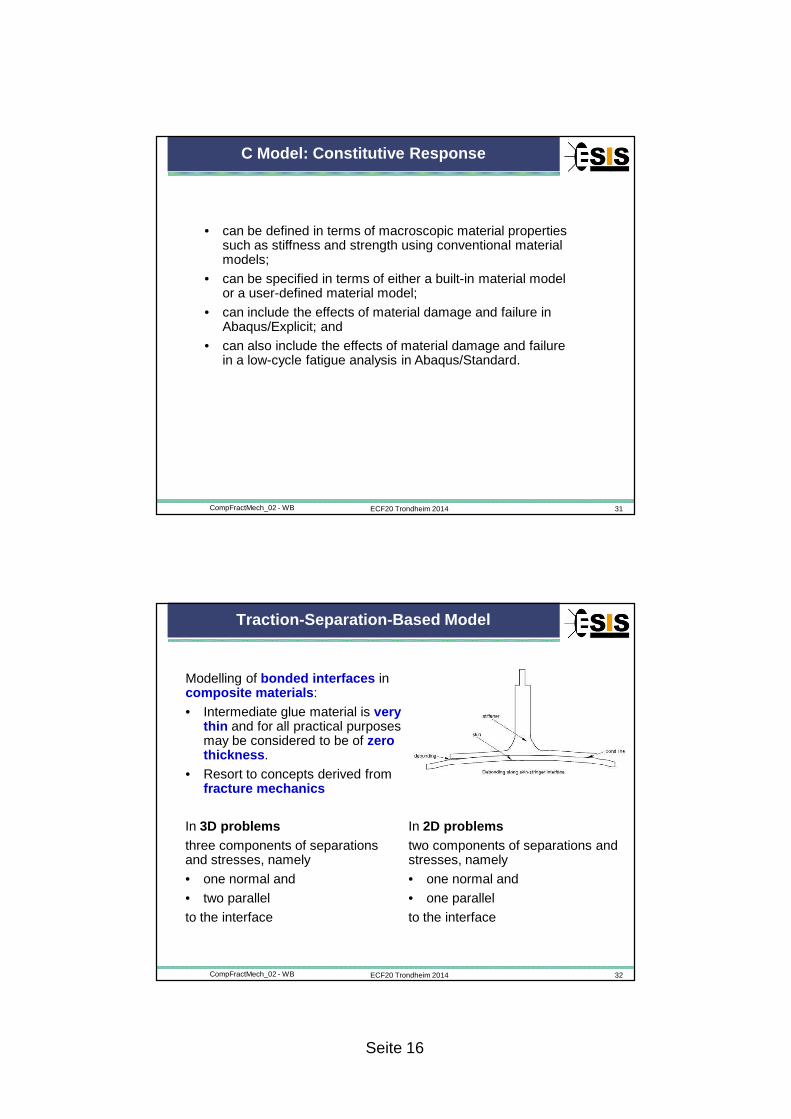
Continuum-Based Model
Modelling of adhesive joints :
• The glue has a finite thickness .
• The macroscopic properties, stiffness and strength, can be measured experimentally.
• The adhesive material is generally more compliant than the surrounding material
In 3D problems• one direct (through-thickness)
strain,
• two transverse shear strains,
• six stress components.
In 2D problems• one direct (through-thickness)
strain,
• one transverse shear strain,
• four stress components.
Seite 16
ECF20 Trondheim 2014 31CompFractMech_02 - WB
C Model: Constitutive Response
• can be defined in terms of macroscopic material properties such as stiffness and strength using conventional material models;
• can be specified in terms of either a built-in material model or a user-defined material model;
• can include the effects of material damage and failure in Abaqus/Explicit; and
• can also include the effects of material damage and failure in a low-cycle fatigue analysis in Abaqus/Standard.
ECF20 Trondheim 2014 32CompFractMech_02 - WB
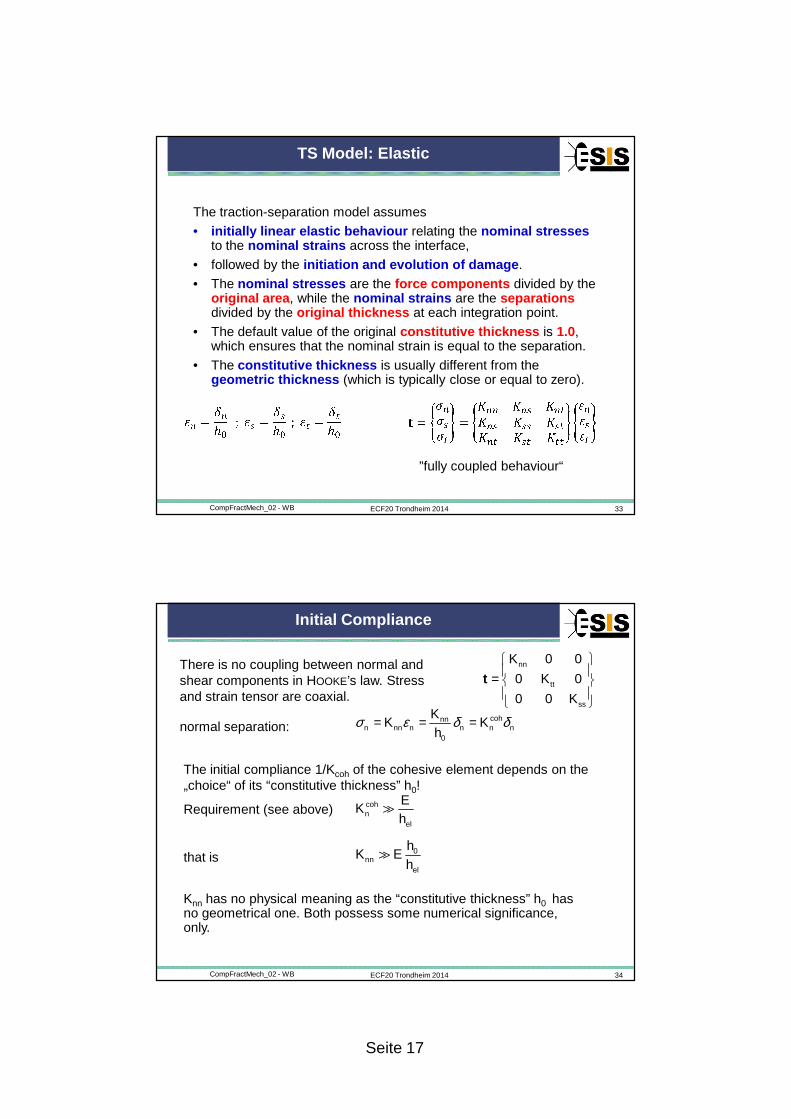
Traction-Separation-Based Model
Modelling of bonded interfaces in composite materials :
• Intermediate glue material is very thin and for all practical purposes may be considered to be of zero thickness .
• Resort to concepts derived from fracture mechanics
In 3D problemsthree components of separations and stresses, namely
• one normal and
• two parallel
to the interface
In 2D problemstwo components of separations and stresses, namely
• one normal and
• one parallel
to the interface
Seite 17
ECF20 Trondheim 2014 33CompFractMech_02 - WB
TS Model: Elastic
The traction-separation model assumes
• initially linear elastic behaviour relating the nominal stresses to the nominal strains across the interface,
• followed by the initiation and evolution of damage .
• The nominal stresses are the force components divided by the original area , while the nominal strains are the separationsdivided by the original thickness at each integration point.
• The default value of the original constitutive thickness is 1.0, which ensures that the nominal strain is equal to the separation.
• The constitutive thickness is usually different from the geometric thickness (which is typically close or equal to zero).
”fully coupled behaviour“
ECF20 Trondheim 2014 34CompFractMech_02 - WB
Initial Compliance
There is no coupling between normal and shear components in HOOKE’s law. Stress and strain tensor are coaxial.
0 0
0 0
0 0
nn
tt
ss
K
K
K
=
t
normal separation:coh
0
nnn nn n n n n
KK K
hσ ε δ δ= = =
coh
eln
EK
h≫
The initial compliance 1/Kcoh of the cohesive element depends on the „choice“ of its “constitutive thickness” h0!
Requirement (see above)
that is0
elnn
hK E
h≫
Knn has no physical meaning as the “constitutive thickness” h0 has no geometrical one. Both possess some numerical significance, only.
Seite 18
ECF20 Trondheim 2014 35CompFractMech_02 - WB
TS Model: “Damage”
Damage :
• Once a damage initiation criterionis met, material damage can occur according to a user-defined damage evolution law.
• A scalar damage variable, D, represents the overall damage in the material and captures the combined effects of all the active mechanisms.
• Unloading subsequent to damage initiation is always assumed to occur linearly toward the origin of the traction-separation plane.
• Reloading subsequent to unloading also occurs along the same linear path until the softening envelope is reached.
ECF20 Trondheim 2014 36CompFractMech_02 - WB
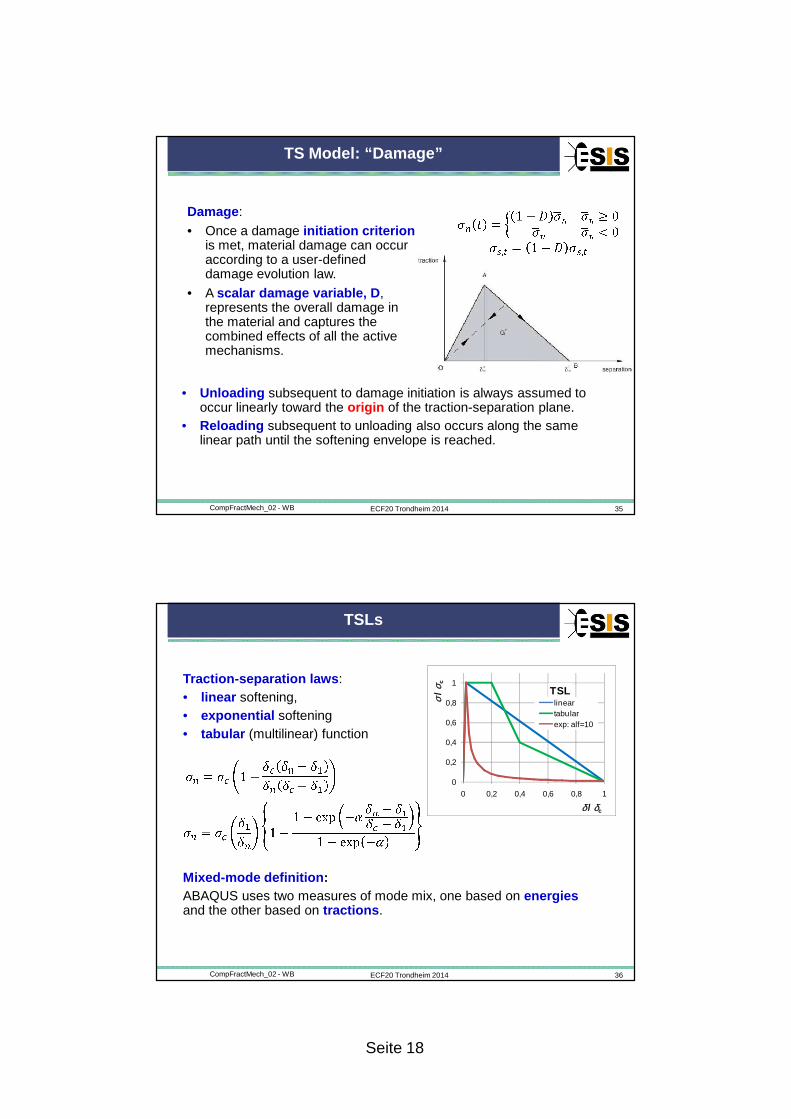
TSLs
Mixed-mode definition :ABAQUS uses two measures of mode mix, one based on energiesand the other based on tractions .
Traction-separation laws : • linear softening, • exponential softening • tabular (multilinear) function
0
0,2
0,4
0,6
0,8
1
0 0,2 0,4 0,6 0,8 1
σ/ σ
c
δ / δc
TSLlineartabularexp: alf=10
Seite 19
ECF20 Trondheim 2014 37CompFractMech_02 - WB
”Damage“
0
0,2
0,4
0,6
0,8
1
0 0,2 0,4 0,6 0,8 1
D
δ / δc
"damage"lineartabularexp: alf=10
( ) ( ) 0coh
1 1n n n n
n n nn n
DK K
σ δ σ δ δδ δ
= − = −
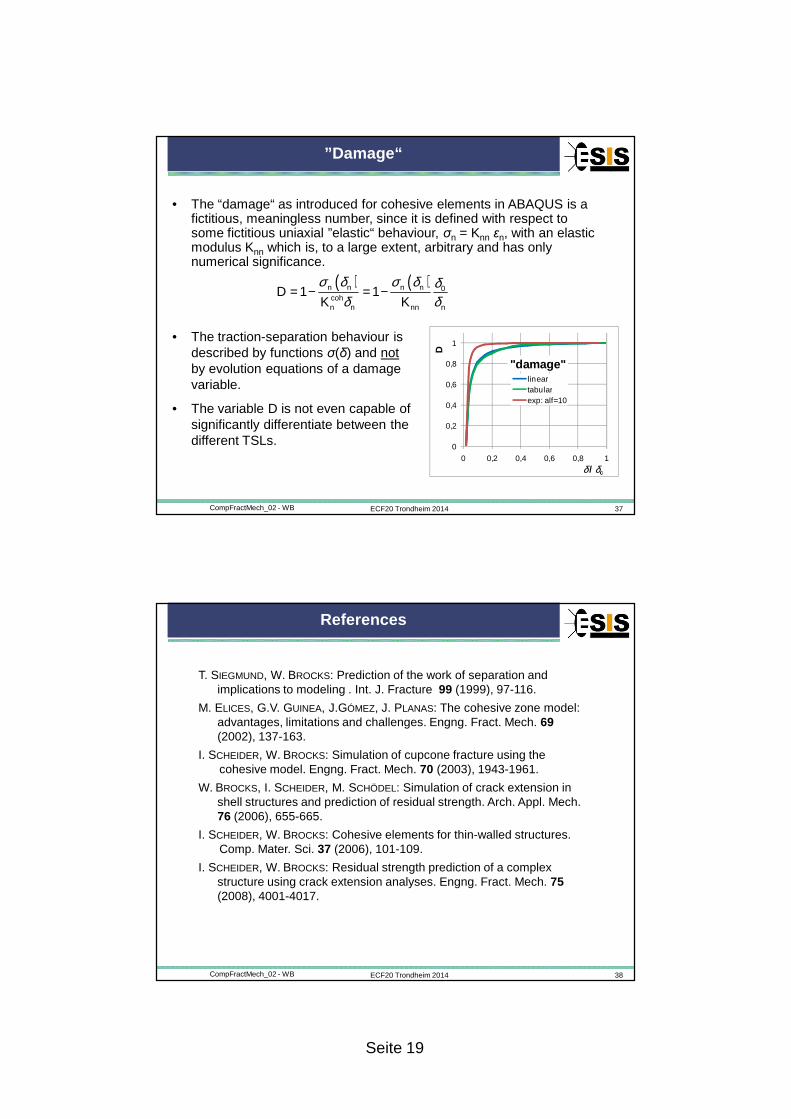
• The “damage“ as introduced for cohesive elements in ABAQUS is a fictitious, meaningless number, since it is defined with respect to some fictitious uniaxial ”elastic“ behaviour, σn = Knn εn, with an elastic modulus Knn which is, to a large extent, arbitrary and has only numerical significance.
• The traction-separation behaviour is described by functions σ(δ) and notby evolution equations of a damage variable.
• The variable D is not even capable of significantly differentiate between the different TSLs.
ECF20 Trondheim 2014 38CompFractMech_02 - WB
References
T. SIEGMUND, W. BROCKS: Prediction of the work of separation and implications to modeling . Int. J. Fracture 99 (1999), 97-116.
M. ELICES, G.V. GUINEA, J.GÓMEZ, J. PLANAS: The cohesive zone model: advantages, limitations and challenges. Engng. Fract. Mech. 69(2002), 137-163.
I. SCHEIDER, W. BROCKS: Simulation of cupcone fracture using the cohesive model. Engng. Fract. Mech. 70 (2003), 1943-1961.
W. BROCKS, I. SCHEIDER, M. SCHÖDEL: Simulation of crack extension in shell structures and prediction of residual strength. Arch. Appl. Mech. 76 (2006), 655-665.
I. SCHEIDER, W. BROCKS: Cohesive elements for thin-walled structures. Comp. Mater. Sci. 37 (2006), 101-109.
I. SCHEIDER, W. BROCKS: Residual strength prediction of a complex structure using crack extension analyses. Engng. Fract. Mech. 75(2008), 4001-4017.


















