1 Communication Networks Chapter 1 : Introduction to Communication Networks and Services.

Communication Networks Group
Jyoti Ranjan Rout
Design and Implementation of a Cluster FormationFramework for Pedestrian-to-PedestrianCommunication
Master Thesis in Elektrotechnik und Informationstechnik
14 January 2017
Please cite as:Jyoti Ranjan Rout, “Design and Implementation of a Cluster Formation Framework for Pedestrian-to-PedestrianCommunication,” Master Thesis (Masterarbeit), Technische Universität Ilmenau, Deptpartment of ElectricalEngineering and Information Technology, January 2017.
Technische Universität IlmenauDepartment of Electrical Engineering and Information Technology
Communication Networks Group
Helmholtzplatz 2 · 98693 Ilmenau · Germanyhttp://www.tu-ilmenau.de/kn

Design and Implementation of a ClusterFormation Framework for
Pedestrian-to-Pedestrian Communication
Master Thesis in Elektrotechnik und Informationstechnik
submitted by
Jyoti Ranjan Rout
in the
Communication Networks Group
Department of Electrical Engineeringand Information Technology
Technische Universität Ilmenau
Advisor: M. Sc. Parag SewalkarResponsible Professor: Prof. Dr. rer. nat. Jochen Seitz
Submission Date: 14.01.2017

Acknowledgement
I would like to thank my immediate supervisor, M. Sc. Parag Sewalkar and the professorin charge, Prof. Jochen Seitz for the opportunity they have provided me to work on thisthesis. Mr. Sewalkar has provided continuous support and regular feedback throughoutthe course of this thesis which has helped me to accomplish my objectives. I am verygrateful to Prof. Martin Haardt and Technische Universität Ilmenau for allowing me topursue my master degree. I am forever indebted to my parents for their endless supportand motivation. I would like to thank all my friends and Almighty for everything.
Master thesis Jyoti Ranjan Rout ii

Abstract
Vehicle-to-Vehicle (V2V) communication is designed to prevent road accidents. TheDedicated Short Range Communication (DSRC) technology uses Wireless Access inVehicular Environment (WAVE) protocol architecture to enable safety and non-safetyapplications in Vehicular Ad Hoc Network (VANET). Safety messages are exchangedover a dedicated channel at Medium Access Control (MAC) layer. Use of the dedicatedchannel for safety messages exchange may lead to congestion. There are various channelcongestion control mechanisms in place for V2V communication. To prevent the roadaccidents involving pedestrians, we need Vehicle-to-Pedestrian (V2P) communicationfor their safety. Available V2P communication mechanisms address the issue of trafficcollision avoidance and road accidents. Various clustering algorithms for VANETand MANET proposed in literature concentrate mainly on attaining cluster stability.However these algorithms usually do not consider unique mobility, distance and directionparameters required for V2P communication and also do not address the issue of channelcongestion. Due to the use of the dedicated channel for safety message exchange in V2Pcommunication, the issue of channel congestion is still a matter of concern in V2Vcommunication.
To address this problem, a collaborative P2P communication on the non-safety ServiceChannel (SCH) is proposed which could help reduce the number of messages generated bypedestrians directed towards the vehicles. In this research work, a clustering algorithmfor the pedestrians is designed and implemented using the SCH. The pedestrian clusterhead is selected based on various parameters present in the safety message received fromthe vehicle on the dedicated channel. Only the pedestrian cluster head broadcast safetymessages on the dedicated channel, thereby reducing the number of safety messagestargeted towards the vehicles. Implementation and simulation of the algorithm areaccomplished in OMNeT++, Veins and SUMO. Simulation result with a sparse trafficscenario shows that the pedestrian clustering has reduced the number of safety messageson the dedicated channel targeted towards the vehicles. It helps in controlling congestionthat is caused by enabling V2P communication. Finally, a technique to compute thecluster longevity is proposed.
Master thesis Jyoti Ranjan Rout iii

Zusammenfassung
V2V Kommunikation soll Verkehrsunfälle zu verhindern. Die DSRC Technologie nutztWAVE Protokoll Architektur ermöglichen Sicherheits- und nicht sicherheitsrelevanteAnwendungen in VANET. Sicherheitshinweise werden ausgetauscht, über einen eigenenKanal auf MAC Schicht. Einsatz von dedizierten Kanal für Sicherheit Nachrichten-austausch führt zu Staus. Es gibt verschiedene Kontrollmechanismen der Kanal Stausin V2V Kommunikationsort. Um die Verkehrsunfälle mit Fußgängern zu vermeiden,brauchen wir V2P Kommunikation für ihre Sicherheit. Verfügbaren V2P Kommuni-kationsmechanismen sprechen das Thema Verkehr Kollisionsvermeidung und Unfälleim Straßenverkehr. Verschiedene clustering-Algorithmen für VANET and MANET inLiteratur konzentrieren sich hauptsächlich auf erreichen Cluster Stabilität vorgeschlagen.Aber diese Algorithmen in der Regel nicht einzigartige Mobilität, Entfernung und Rich-tung für V2P Kommunikation erforderlichen Parameter und sprechen auch nicht dieFrage der Kanal Staus. Durch den Einsatz von speziellen Kanal für Sicherheit Nach-richtenaustausch in V2P Kommunikation geht es Kanal Staus noch Anlass zur Sorge inV2V-Kommunikation.
Zur Bewältigung dieses Problems, eine gemeinsame P2P Kommunikation auf dienicht sicherheitsrelevanten SCH wird vorgeschlagen, die helfen könnte, die Zahl derMeldungen von Fußgängern auf die Fahrzeuge gerichtet. In dieser Forschungsarbeit einclustering-Algorithmus für die Fußgänger ist konzipiert und umgesetzt, mit dem SCH.Die Fußgängerzone Cluster-Kopf ausgewählt anhand verschiedener Parameter in derSicherheit Nachricht erhielt aus dem Fahrzeug auf dem dedizierten Kanal vorhandenist. Nur die Fußgängerzone Cluster Leiter Sicherheit Broadcastmeldungen auf demdedizierten Kanal, wodurch die Zahl der Warnhinweise auf den Fahrzeugen ausgerichtet.Implementierung und Simulation des Algorithmus werden in OMNeT ++, Venen undSUMO durchgeführt. Simulationsergebnis mit einem spärlichen Verkehrs-Szenario zeigt,dass die Fußgänger clustering die Anzahl der Warnhinweise auf dem dedizierten Kanalrichtet sich an die Fahrzeuge reduziert hat. Es hilft bei der Kontrolle der Staus, dieverursacht wird durch Aktivierung V2P-Kommunikation. Schließlich ist eine Technik,um die Langlebigkeit der Cluster compute vorgeschlagen.
Master thesis Jyoti Ranjan Rout iv

Contents
Abstract iii
Zusammenfassung iv
1 Introduction 11.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.3 Aim of the Thesis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.4 Thesis Structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2 DSRC/WAVE System 42.1 Overview of DSRC/WAVE System . . . . . . . . . . . . . . . . . . . . . 42.2 DSRC Channel Coordination . . . . . . . . . . . . . . . . . . . . . . . . 5
3 Background 73.1 V2V, V2P and P2P Communication . . . . . . . . . . . . . . . . . . . . 73.2 V2P Communication Scenarios . . . . . . . . . . . . . . . . . . . . . . . 83.3 Clustering Mechanism . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
4 Literature Review 114.1 V2P Communication . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114.2 Clustering Mechanisms in VANET and MANET . . . . . . . . . . . . . 13
4.2.1 Clustering Mechanisms in VANET . . . . . . . . . . . . . . . . . 134.2.2 Clustering Mechanisms in MANET . . . . . . . . . . . . . . . . . 15
4.3 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
5 Cluster Formation Framework 185.1 V2P Communication on DSRC . . . . . . . . . . . . . . . . . . . . . . . 18
Master thesis Jyoti Ranjan Rout v

Contents
5.2 Clustering Algorithm Architecture and Design . . . . . . . . . . . . . . 195.2.1 Cluster Formation . . . . . . . . . . . . . . . . . . . . . . . . . . 20
5.2.1.1 Cluster Joining . . . . . . . . . . . . . . . . . . . . . . . 205.2.1.2 Cluster Head Selection . . . . . . . . . . . . . . . . . . 22
5.2.2 Cluster Maintenance . . . . . . . . . . . . . . . . . . . . . . . . . 23
6 Network Design and Implementation 276.1 Simulators and Software . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
6.1.1 OMNeT++ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 276.1.2 SUMO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 286.1.3 Veins . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
6.2 Implementation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 296.2.1 Configuration in SUMO . . . . . . . . . . . . . . . . . . . . . . . 296.2.2 Configuration in Veins and OMNeT++ . . . . . . . . . . . . . . 30
7 Simulation Results and Analysis 327.1 Comparison and Analysis of Sparse Traffic Scenario Results . . . . . . . 327.2 Evaluation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
8 Conclusion and Future Work 358.1 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 358.2 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Bibliography 36
List of Figures 39
List of Tables 40
Erklärung 43
Declaration 44
Master thesis Jyoti Ranjan Rout vi

Chapter 1
Introduction
1.1 Overview
Continuous development in wireless technologies render opportunities to support ve-hicular communication, especially for road safety applications. In addition to Vehicle-to-Vehicle (V2V) and Vehicle-to-Infrastructure (V2I) communication for road safety,Vehicle-to-Pedestrian (V2P) communication to prevent accidents involving pedestriansand cyclists is necessary. Considering the highly mobile environment in Vehicular AdHoc Networks (VANETs), Dedicated Short Range Communication (DSRC) technol-ogy is designed and developed to overcome the shortcomings of traditional wirelesstechnologies. In the Wireless Access in Vehicular Environment (WAVE) protocol archi-tecture, the safety messages are exchanged over a dedicated channel at Medium AccessControl (MAC) layer. Control Channel (CCH) and Service Channel (SCH) can beused for safety messages exchange, but for non-safety applications, only SCH is used.To address the issue of channel congestion in V2V and V2I communication, there aremany mechanisms already in place. In order to reduce the number of safety messagesexchange on the dedicated channel in V2P network, a collaborative P2P communicationis used on the non-safety SCH. In this thesis, it is assumed that the safety messagesare exchanged on CCH. This research aims at designing and implementing a clusterformation mechanism for pedestrians on the SCH using Objective Modular NetworkTestbed in C++ (OMNeT++), Vehicle In Network Simulation (Veins) and Simulation ofUrban Mobility (SUMO). Simulation results with and without clustering are analyzed,interpreted and finally conclusions based on the former are drawn.
Master thesis Jyoti Ranjan Rout 1

1 Introduction
1.2 Motivation
Road accidents involving pedestrians and cyclists cause several casualties and injuriesall over the world. To reduce the road accidents there are many collision avoidance tech-niques available based on V2V, V2P and V2I communication. The use of the dedicatedchannel for transmitting safety messages could lead to channel congestion. There areseveral methods to address this issue in V2V network, such as Transmission control (e.g.,power, periodicity) and MAC Time Division Multiplexing (TDM) techniques. Variousclustering algorithms for VANET and MANET address the issue of traffic collisionavoidance. However, these algorithms concentrate mainly on attaining cluster stabilityand do not address the issue of channel congestion. Also, these mechanisms usually donot take into account the unique mobility, distance and direction parameters requiredfor V2P communication. In this case of an overloaded dedicated channel, a collaborativeP2P communication on the available non-safety SCH can help to reduce the amount ofmessages targeted towards the vehicles. The approach is to form pedestrian clustersbased on various parameters present in the safety message received from the vehicle onthe dedicated channel. The formation of clusters and the selection of cluster head is tobe performed only on SCH. The pedestrian cluster head would replace the task of eachpedestrian transmitting safety messages to the vehicles by transmitting the messages intheir stead. This approach could help in reducing the number of V2P messages exchangeon the dedicated channel and thereby reduce the load on V2V communication.
1.3 Aim of the Thesis
The aim of this thesis is to study the requirements of a clustering algorithm takinginto consideration the unique mobility, distance and direction requirements in V2Pcommunication. And then to design, implement and evaluate the cluster architectureframework for pedestrians. To fulfill this, the following tasks need to be carried out:
1. Study on the DSRC/WAVE system that enables V2V and V2P communicationand also the V2P scenarios. The survey on existing clustering mechanisms onMANETs and VANETs.
2. Designing a cluster formation mechanism based on various parameters of pedestri-ans and vehicles.
3. Implementation of the clustering algorithm which would use SCH for clusterformation.
Master thesis Jyoti Ranjan Rout 2

1 Introduction
4. Evaluation of the clustering mechanism based on multiple scenarios and its impactbased on appropriate performance metrics.
5. Analysis of the simulation results based on important cluster characteristics, suchas time to form cluster and cluster longevity.
1.4 Thesis Structure
In chapter 2, an overview of DSRC and WAVE system that enables V2V and V2Pcommunication are mentioned. V2V, V2P and P2P communication are discussed inchapter 3. Also, various V2P scenarios are described in this chapter. Literature surveyon V2P communication and existing clustering mechanisms in VANETs and Mobile AdHoc Networks (MANETs) are discussed in chapter 4. The design and architecture of theproposed cluster formation mechanism are described in chapter 5. In chapter 6, the opensource simulators OMNeT++, Veins and SUMO are discussed. The implementation andthe parameters required for the clustering algorithm are also described in this chapter.Simulation results and analysis of the implemented cluster mechanism based on variousscenarios and parameters are carried out in chapter 7. Finally, in chapter 8, conclusionand future work are discussed.
Master thesis Jyoti Ranjan Rout 3

Chapter 2
DSRC/WAVE System
In this chapter, an overview of DSRC/WAVE architecture is provided. The currentstate of the art technology on VANET communication based on DSRC is outlined. Also,few possible V2P scenarios are described in this chapter.
2.1 Overview of DSRC/WAVE System
There are several challenges for Wi-Fi technology to address, such that it can be usedin VANET to achieve maximum and stable performance. Due to the high mobility,non-line-of-sight and densely populated situations, DSRC technology has been developedto support these unique requirements in vehicular communication. Continuous effortshave been made by the automotive industries, governments and academia to make thistechnology effective and safe for commercial deployment. An effective utilization of thistechnology would really help in reducing the traffic accidents happening all over theworld every day.
WAVE system is a vehicular radio communication technology which provides servicesto transportation recognized by Intelligent Transport System (ITS), automotive andvarious transportation industries. It provides communication between vehicles, roadsideinfrastructure and pedestrians. It is used mainly for applications like vehicle safetyservices, electronic toll collection and commercial transactions. The standard related toWAVE consists of IEEE 802.11p and IEEE 1609 family as mentioned in [1].
WAVE standards consists of IEEE 1609 family, mainly IEEE 1609.0 (WAVE Architec-ture) [1], IEEE 1609.2 (Security Services for Applications and Management Messages) [2],IEEE 1609.3 (Networking Services) [3] and IEEE 1609.4 (Multi-Channel Operation) [4],as shown in figure 2.1.DSRC is a technology based on IEEE 802.11a and standardized as IEEE 802.11p
WAVE. It works in the radio spectrum of 5.9 GHz frequency band with an approximate
Master thesis Jyoti Ranjan Rout 4

2 DSRC/WAVE System
Higher Layers (Safety and Non-Safety Applications)
Secu
rity
Serv
ices
Man
agem
ent
Enti
ty
LLC
WSMP
WAVE MAC
(Channel Coordination)
PHY
UDP/TCP
IPv6 1609.3
802.11p
1609.4
1609.2 1609.6
1609.11Higher Layers (Safety and Non-Safety Applications)
Secu
rity
Serv
ices
Man
agem
ent
Enti
ty
LLC
WSMP
WAVE MAC
(Channel Coordination)
PHY
UDP/TCP
IPv6 1609.3
802.11p
1609.4
1609.2 1609.6
1609.11
Figure 2.1 – WAVE Architecture [1]
communication range up to 1000 m. This frequency band is free but is licensed, unlikethe 2.4 GHz and 5 GHz frequency bands used in Wi-Fi and Bluetooth. IEEE 802.11p isbased on IEEE 802.11a, having MAC and PHY layers enhancements to support VANETapplications. The IEEE 802.11p standard uses 10 MHz bandwidth channels in the 5.9GHz (5.85 – 5.925 GHz) frequency band. This frequency band is divided into sevenchannels of 10 MHz each, one CCH and six SCHs as shown in figure 2.2. Both theCCH and SCH can be used for safety applications but only SCH is used for non-safetyapplications. This technology uses Orthogonal Frequency Division Multiplexing (OFDM)to provide data rates of 6 Mbps to 27 Mbps and can go up to a maximum of 54 Mbps iftwo service SCHs are combined together.As mentioned in [1] and [3], the standard Internet Protocol version 6 (IPv6) and
WAVE Short Message Protocol (WSMP) has been designed for an optimum utilizationin WAVE. WAVE Short Message (WSM) used for safety applications may be sent onboth CCH and SCHs. Non-safety messages exchange are allowed only on SCHs.
2.2 DSRC Channel Coordination
The multi-channel operation in DRSC is described in [4]. This operation uses FDMAand TDMA techniques, where the seven FDMA channels were mentioned in section 2.1.
Master thesis Jyoti Ranjan Rout 5

2 DSRC/WAVE System
SCH
Channel
Number
SCH SCH CCH SCH SCH SCH
172 184178
Gu
ard
Ban
d175
174 176
181
180 182
Channel
Type
Frequency
(MHz) 5850 5855 5865 5875 5885 5895 5905 5915 5925
Figure 2.2 – DSRC Frequency Spectrum [5]
The TDMA frame shown in figure 2.3 consists of a repetitive period of 100 ms. Thistime interval is again sub-divided into two slots of 50 ms each for CCH and SCH. Thetime slot of 50 ms includes a Guard Interval (GI) of 4 ms, which is used for channelswitching. A physical device can access the CCH in time slot 0 and the SCH in time slot1. A device can switch between these time slots to avail multiple safety and non-safetyservices.
CCH (46 ms) SCH (46 ms)
GI
(4 m
s)
GI
(4 m
s)
Figure 2.3 – DSRC TDMA Frame [5]
Master thesis Jyoti Ranjan Rout 6

Chapter 3
Background
3.1 V2V, V2P and P2P Communication
In VANET, other than V2V and V2I communications, V2P and P2P communication isalso important to avoid road accidents. There have been several research works on V2Pcommunication using cellular networks, ad-hoc networks and DSRC for road safety. Theapplication of device-to-device technologies in V2V, V2P and P2P communication byusing vehicles and smartphones can lead to significant improvement in road safety. Notonly for avoiding road accidents, but also to avoid traffic congestion, a communicationnetwork of vehicles and pedestrians is really effective. This communication technique canalso be used in disaster scenarios, where cellular network infrastructure is not available.In this type of network, communication happens between mobile devices in vehicles
(e.g., cars, buses, trucks, trams) and smartphones (e.g., pedestrians, bicyclists, disabledpersons on wheelchair). The communication between different entities is mainly usedfor exchanging collision warning and alert messages. Apart from safety messages, thesecommunication networks can also be used for non-safety applications (e.g., commercial,entertainment).A scenario of co-existence of V2V, V2P and P2P communication at the same road
intersection is shown in figure 3.1. Two vehicles exchange safety messages related totraffic condition ahead or any other non-safety messages as well. In V2P communication,vehicles broadcast their presence to alert the available pedestrians. Similarly, in P2Pcommunication, pedestrians broadcast the alert message received from vehicles to makefellow pedestrians alert.
Master thesis Jyoti Ranjan Rout 7

3 Background
V2P
Figure 3.1 – A co-existence of V2V, V2P and P2P communication
3.2 V2P Communication Scenarios
There could be many possible scenarios of V2P communication in urban and semi-urbanareas. This type of communication is vital mainly for exchanging safety messagesbetween vehicles and pedestrians to avoid traffic accidents. This section describes twoof the most important real-life scenarios of V2P communication. Figure 3.2 shows ascenario where the pedestrians are walking on a sidewalk. The vehicles and pedestriansexchange messages of their presence.Another scenario is shown in figure 3.3, where the pedestrians are crossing a road
intersection and the bicyclists are traveling along their respective path. Here also thesafety messages are exchanged between the different entities present.
Master thesis Jyoti Ranjan Rout 8

3 Background
Figure 3.2 – Pedestrians walking on sidewalk
Powered by TCPDF (www.tcpdf.org)
Figure 3.3 – Pedestrians crossing a road intersection [6]
Master thesis Jyoti Ranjan Rout 9

3 Background
3.3 Clustering Mechanism
The clustering mechanism is basically comprised of two main processes. One is clusterformation and the other is cluster maintenance. In the cluster formation process, nodesmay form a cluster based on direction, speed and the distance between them. There canbe other parameters (e.g., energy, weight) for cluster formation. Then cluster head isselected based on different characteristics (e.g., lowest relative velocity, highest energy,highest connectivity, maximum weight) of the nodes. The cluster maintenance consistsof cluster joining, cluster merging, change of cluster head, cluster destruction.
Master thesis Jyoti Ranjan Rout 10

Chapter 4
Literature Review
In this chapter, existing efforts in V2P communication for pedestrian safety is reviewed.Various clustering mechanisms in VANET and MANET have also been reviewed in thischapter.
4.1 V2P Communication
The primary goal of V2P communication is to provide safety and collision avoidance forpedestrians or cyclists moving on the sidewalk.
As discussed in [7], full deployment of OBUs for VANET application would take manyyears. The OBU is based on WAVE standards and is installed inside a vehicle for V2Vand V2I communications. It is because of the certainly long delay in deployment ofthis technology, feasibility study of smartphone and cellular networking based VANEThas been carried out in this paper. A smartphone application named VoCell, based onthe cellular network has been designed for VANET applications which can be easilydeployable. However, the use of the cellular network for VANET applications could leadto channel congestion. So there is a need to separate the cellular networks and VANET.The DSRC technology has been developed and designed for this purpose.
In [8], the present technologies utilized by DSRC to achieve road safety has beenreviewed. Remaining challenges such as packet collisions in MAC layer and channelestimation and insufficient time diversity in PHY layer, which can be solved in the nextversions of DSRC, has been analyzed in this paper. The concept of multi-channel opera-tion in DSRC frequency band introduces new challenges in VANET. A possible solutionfor this critical issue has also been discussed. The existing and future enhancements inDSRC performance has also been mentioned along with its evolution path.
In [9], a communication technique between vehicles and pedestrians based on DSRCtechnology has been discussed. This communication mechanism aims at reducing road
Master thesis Jyoti Ranjan Rout 11

4 Literature Review
accidents. The use of DSRC brings many challenges for this communication method.One of the important challenge mentioned is the channel congestion in MAC layer. Itis due to the use of the same dedicated channel by the vehicles and the smartphones(pedestrians). Various possible solutions have been suggested and analyzed in this paperwhich will be discussed in the next chapter.
In [10], various research attempts to address pedestrian safety and collision avoidanceare reviewed. It describes active and passive safety measures adopted by vehicles andinfrastructures for pedestrian detection. The active safety measures include different typeof sensors mounted on vehicles and infrastructures for pedestrian detection. The passivesafety measures include improving vehicle design and infrastructure enhancements (e.g.,speed limit indication, vehicle-pedestrian path separation and visibility improvement) inorder to reduce vehicle-pedestrian collisions. Pedestrian dynamics and behaviors whichare also important for collision prediction has also been discussed in this paper. However,for this approach, an interaction between vehicles and pedestrians is not considered inthis paper.Using Wireless Local Area Network (WLAN) in V2P communication has many
challenges and one of them is the fast device discovery as mentioned in [11]. To solvethis problem, two methods of scanning has been described in this paper. One is CollectiveScanning in which a vehicle operating in one channel receives responses from pedestriansoperating in different available channels. Another is Collective Scanning + ExtensionReceiving in which scanning time is improved and detection leakage of pedestrians isaverted.In [12], an application based on Wi-Fi has been designed for V2P communication.
This application named V2ProVu helps in alarming the pedestrians with smartphonesif they are in the range of vehicles movement and with a risk of collision. A vehicleenabled with this application would act as a transmitter and smartphone enabled withthis application would act as a receiver.
[13] proposes a system that uses a combination of cellular and ad hoc networks forcollision avoidance. A stationary central server has been considered for exchangingmessages between the vehicles and the pedestrians. One combination is communicationbetween the pedestrian, the vehicle and the central server through ad hoc and cellularnetworks. The other combination is communication between the vehicle, the pedestrian,the central server through only the cellular network. An approach without having thecentral server and using the combination of ad hoc and cellular networks has also beendiscussed in this paper. For this reason, the different criteria considered were energyconsumption by smartphones, system time duration between sensing and reaction,infrastructure reliability, cost and deployment time.
Master thesis Jyoti Ranjan Rout 12

4 Literature Review
4.2 Clustering Mechanisms in VANET and MANET
Several clustering mechanisms used in MANETs and VANETs for different purposes arediscussed in [14]. The important feature of MANETs is: the mobile nodes do not havea fixed movement pattern. Also, the nodes in MANETs have limited battery life, whichneeds to be effectively utilized for the stability of the network. In VANETs, battery lifeis not of a big concern, as they rely on the battery of vehicles. But due to high mobility,VANETs face the issue of link connectivity. The biggest problem in ad hoc networksis message collision and network delay due to broadcasting as mentioned in [15]. Thiscontinuous broadcasting results in redundant messages at each node, which in turnwaste the network bandwidth and resources. To minimize these effects of broadcasting,various clustering algorithms are developed. Clustering is a method to create a group ofnodes having similar behavior or characteristics. One of the most important goals ofclustering algorithms is to maintain the stability of a cluster, where the cluster headdoes not change frequently as per the network topology. Several clustering algorithmsin MANETs and VANETs are discussed in this section.
4.2.1 Clustering Mechanisms in VANET
In this section, several clustering mechanisms in VANETs including their objectives andvarious parameters considered for clustering are discussed.
In [16], the author proposes a Modified DMAC clustering algorithm, which is anenhancement to the Distributed Mobility-Adaptive Clustering (DMAC) algorithmmentioned in section 4.2.2. The specific mobility pattern in road traffic is considered inthis approach. In this algorithm, speed, direction, id, location, etc. of the vehicles areconsidered for the formation of cluster and weights (energy level, mobility or connectivity)of nodes are considered for cluster head selection. The main objective of this algorithmis to increase cluster stability.
[17] proposes a mobility based clustering scheme in VANET using Affinity Propagationtermed as Affinity PROpagation for VEhicular networks (APROVE). Like the ModifiedDMAC, this mechanism also considers vehicular mobility for cluster formation and toachieve high cluster stability (high cluster member longevity, high cluster head longevityand low rate of cluster head change). This algorithm takes into account the minimumdistance and relative velocity between cluster head and cluster members. The clusterhead is elected periodically by an affinity propagation method in a distributed manner.
[18] proposes a stable clustering algorithm for efficiency applications in VANETs,which considers the direction of travel for cluster formation with a cluster head switchingmechanism to handle overtaking vehicles. The objective of this algorithm is to attain
Master thesis Jyoti Ranjan Rout 13

4 Literature Review
cluster stability and to effectively estimate the density of the vehicles in a cluster.This mechanism assumes that each vehicle gets its position from Global PositioningSystem (GPS) and the direction of travel from digital maps. Cluster formation startsmuch before the road intersection and is based on vehicle’s direction of travel. Vehicleswhich take the same turn at a road intersection belongs to the same cluster.
[19] proposes a cluster-based architecture for intersection collision avoidance usingheterogeneous networks. This clustering algorithm is based on LTE and Wi-Fi and noton DSRC. It mentions that DSRC may not be effective for certain applications like roadintersection collision avoidance. Wi-Fi channels are used for forming the cluster andLTE is used for exchanging safety messages among clusters. Vehicles get the location,speed, road intersection information from their GPS and digital maps.In article [20], author Nishiyama et. al. propose a group forming and disbanding
mechanism for vehicles and pedestrians. It describes a prototype as a smartphoneapplication that can be used for V2V, V2P and P2P communication through a Wi-Fiinterface. This application can be used for road traffic congestion avoidance, crashdetection, entertainment, commercial purpose and many others. For selecting a groupleader, they consider battery life, relative velocity, location and amount of informationneed to be exchanged.
[21] presented a MAC scheme based on VANET clustering for supporting both safetyand non-safety applications. DSRC interface is used for clustering, where the controlchannel has a range of 1000 m and the service channel has a range of 30 m to 400 m. Avehicle is assumed to have a single DSRC interface with GPS enabled, which meansthat it can only use a single channel at one instance. For this reason, a system cycleis proposed which divides it into control and service sub-periods for clustering. Thisalgorithm targets better achievement in terms of average cluster head longevity, averageretransmissions, average network collision and average network delay.The clustering mechanisms discussed above focus mainly on cluster stability and
selecting a cluster head for vehicles. These mechanisms do not address the issue ofchannel congestion. Also, the formation of the cluster is based on the characteristics ofsimilar (e.g., only vehicles) mobile entity. Formation of the pedestrian cluster and thefactors on which it depends on, are not extensively discussed in these reviews. Formingpedestrian cluster according to the characteristics of the vehicle is not addressed in theabove literature study.
Master thesis Jyoti Ranjan Rout 14

4 Literature Review
4.2.2 Clustering Mechanisms in MANET
In this section, several clustering mechanisms in MANETs are discussed based on theparameters considered for clustering. The parameters on which the clustering algorithmswere distinguished are mobility pattern, energy level, connectivity and weights.
[22] proposes a Mobility based metric for Clustering (MOBIC) algorithm. Thisalgorithm is similar to Lowest-ID algorithm but uses mobility metric for clusteringinstead of ID. Every node calculates its relative mobility metric from each of its neighbor,based on the power levels received through two consecutive message exchanges. Eachnode broadcasts its mobility metric to all its neighbors. The node having the minimumvalue of relative mobility is elected to be cluster head and others are considered ascluster members. In the case where two nodes have the same minimum value of mobilitymetric, then the node having the lowest ID becomes the cluster head. This algorithmshows better result compared to Lowest ID algorithm in terms of average rate of clusterhead changes. Due to the mobility metric parameter, this algorithm can also be used inVANETs.
In [23], the author proposes a Distributed Mobility-Adaptive Clustering (DMAC)algorithm based on mobility pattern of nodes. Every node is assumed to have its own ID,weight and role (cluster head or a cluster member) and also the IDs, weights and rolesof its neighbors. The cluster head is elected based on the weight of a node, meaning,the larger the weight, higher the chance of becoming the cluster head.
[24] proposes a Flexible Weighted Clustering Algorithm based on Battery Power(FWCABP). In this algorithm, nodes with low battery power level are restrained to beselected as cluster head which in turn minimizes the number of clusters and clusteringoverhead. The cluster head selection is based on the node’s weight, mobility, batterypower and distance from its neighbors. During the process of cluster head selection, thisalgorithm increases network congestion.
[25] proposes an Enhance Cluster-based Energy Conservation (ECEC) algorithm. Inthis algorithm, the energy level of a node is the basis of cluster formation and clusterhead election. The node with the highest energy level becomes the cluster head. Thisalgorithm increases the lifetime of large MANETs by conserving energy of nodes.In [26], author Agarwal et. al. propose a Highest connectivity clustering (HCC)
algorithm based on the degree of connectivity for cluster formation. A node with themaximum number of neighbors (maximum degree of connectivity) is elected as a clusterhead. The node with the lowest ID is chosen as a cluster head when two nodes have thesame degree of connectivity. In this algorithm, there is no restriction on the number ofnodes that belongs to a cluster.
Master thesis Jyoti Ranjan Rout 15

4 Literature Review
[27] proposes K-hop Connectivity ID Clustering (K-CONID) algorithm. The algorithmis a combination of two criteria for electing cluster head. The first criterion is connectivityand the second is lower ID. The nodes which are at a distance of k-hops from the clusterhead are included in the cluster formation. The goal is to reduce the number of clustersin the network.In [25], author Alinci et. al. propose a Flexible Weight Based Clustering Algorithm
(FWCA) based on various matrices with different weights. For the election of clusterhead, node mobility, battery power and transmission power are used. Instead of nodemobility, clusters capacity and network link lifetime are used for cluster maintenance. Itaims at cluster stability by creating less number of clusters and maximizing the lifetimeof nodes in the network.
[25] proposes an Enhancement on Weighted Clustering Algorithm (EWCA), whichhas a different approach for cluster head election. It is based on node mobility or therelative distance between the cluster head and the mobile nodes. This enhancement isbased on load balancing and network stability which shows better output with respectto these factors.
The clustering algorithms discussed above focus on various parameters for choosing acluster head of mobile nodes and enhancing network stability. Similar to the clusteringmechanisms in VANET, cluster formation in MANET is also based on only a singlemobile entity.
4.3 Summary
Several V2P communication mechanisms for pedestrians safety has been discussedin this chapter. These mechanisms could be different applications installed on themobile devices fitted in the vehicles and carried by the pedestrians. Various clusteringalgorithms discussed in section 4.2.1, use mobility, direction, speed, location, energylevel, etc for clustering of vehicles. The cluster longevity is based on the amount ofenergy level, connectivity and relative velocity. A vehicle remains as a cluster head untilit has the maximum energy, maximum neighbor nodes and a relatively slow velocitycompared to others. Also, the clustering mechanisms discussed in section 4.2.2, considerthe fact that the mobiles nodes in MANET would resemble the slow moving pedestriansin P2P and V2P communication. This survey helped to find the factors and parameterson which the cluster formation could depend on. However, no clustering algorithmfor a mobile device (e.g., vehicles, pedestrians) where the cluster is formed based onthe characteristics of another mobile entity was found. Also, the discussed clustering
Master thesis Jyoti Ranjan Rout 16

4 Literature Review
mechanisms do not use SCH for cluster formation to make it feasible to address channelcongestion issues.
Master thesis Jyoti Ranjan Rout 17

Chapter 5
Cluster Formation Framework
The use of the dedicated channel for safety messages exchange in V2P communicationlead to congestion in V2V communication. Several mechanisms to avoid traffic collisionsand to attain cluster stability in VANET are discussed in the previous chapter. However,there is no significant work on avoiding channel congestion in case the vehicles andpedestrians use the dedicated channel for safety message exchange. To address thisissue, the unused non-safety SCH could be used. This thesis aims at a collaborativecommunication mechanism for pedestrians using SCH that could help in avoiding thesituation of channel congestion caused by V2P communication. For this collaborativecommunication approach, a cluster formation framework using the SCH is proposedand various steps in the clustering algorithm are also mentioned in this chapter. Severalmessage types required for the formation and maintenance of the cluster are alsoexplained.
5.1 V2P Communication on DSRC
To avoid road traffic accidents, a communication technique between vehicles and pedes-trians is mentioned in [9], which is based on DSRC technology. Out of several challengesin this technology, one of the key challenge mentioned is the channel congestion dueto the use of CCH by both vehicles and pedestrians (smartphones). Few solutionsmentioned in this paper to address the challenge are as below:
1. Pedestrians may receive safety messages from the vehicles on CCH. Pedestrianscould only see a warning message on their smartphones and be aware of anyvehicles on the road to avoid the collision.
2. Pedestrians may transmit only on SCH and receive only on CCH.
Master thesis Jyoti Ranjan Rout 18

5 Cluster Formation Framework
3. The pedestrians may transmit on CCH but with reduced power and periodicity.
These solutions could help in avoiding traffic collision, but may not address the issueof channel congestion. Pedestrians may not, in most cases, look at the smartphonescontinuously while walking. There could be a possibility of the vehicles not switchingto SCH. Reducing the power of the smartphones is not a feasible solution becausenormally they use less power for transmission as compared to vehicles. To overcomethese limitations, a clustering algorithm for pedestrians is designed and explained inthis chapter.
5.2 Clustering Algorithm Architecture and Design
In the clustering architecture, two processes are considered, one is cluster formationand the other is cluster maintenance. Cluster formation process consists of clusterjoining and cluster head selection. In the cluster joining process, pedestrians formthe cluster based on direction, speed and distance between them. This process usesonly SCH for the purpose. Cluster head selection is based on the parameters that arecomputed using the received messages from vehicles. The aim of this process is to selecta pedestrian cluster head based on the distance and direction between the pedestriansand the vehicles. The cluster maintenance is a combination of cluster joining and clusterhead selection process.The parameters that are considered for clustering are mentioned below:
1. Distance among pedestrians and between vehicles
2. Direction of travel for the pedestrians and vehicles
3. Speed of pedestrians
The basic assumptions are as follows:
1. For safety messages exchange, CCH is used.
2. Pedestrian switch between CCH and SCH every 50 ms.
3. Vehicle stays always on CCH and broadcast safety messages (beacons) with aninterval of 0.1 s.
4. Pedestrian’s cluster head broadcast beacons on CCH with an interval of 0.5 s.
5. Pedestrian broadcast non-safety messages (data) on SCH with an interval of 0.1 s.
6. RSU is not considered in this design.
Master thesis Jyoti Ranjan Rout 19

5 Cluster Formation Framework
7. GPS is enabled on vehicles and pedestrian smartphones.
8. GPS data is assumed to be accurate by using filters (e.g., Kalman Filter).
5.2.1 Cluster Formation
The cluster formation includes two important steps, one is cluster joining and anotheris cluster maintenance. The algorithm for both of these processes is described below:
5.2.1.1 Cluster Joining
In the cluster joining process, there are two messages exchanged between pedestrians.First is “Hello Invite” and the second is “Hello Join”, which are discussed below:
1. Hello Invite: The pedestrian cluster head broadcasts this message every 100 msto look for potential cluster members. It contains the following parameters:
a) Message Name
b) Cluster Head ID
c) Cluster Head Speed
d) Cluster Head Direction
e) Cluster Head Position
f) Status
2. Hello Join: In order to join the existing cluster, the cluster member transmits thismessage to the cluster head if the parameters in “Hello Invite” message matcheswith its own parameters. It contains the following parameters:
a) Message Name
b) Cluster Head ID
c) Cluster Member ID
d) Status
When a pedestrian starts walking on a sidewalk, it waits for 100 ms until it receives“Hello Invite” message. If it does not receive any such message within this duration,then it broadcast the “Hello Invite” message containing message name, its own id asthe cluster head, position (x, y and z coordinates from GPS), direction and speed. If itreceives the “Hello Invite” message within 100 ms, it compares the received parameterswith its own position, speed, and direction. If its direction is the same as the senderwith its speed 6 0.9, the speed of the sender and its distance from the sender is 6 5
Master thesis Jyoti Ranjan Rout 20

5 Cluster Formation Framework
m, then it replies with “Hello Join” message. Otherwise, it would ignore the received“Hello Invite”. The cluster head who had broadcast the “Hello Invite” message wouldaccept the “Hello Join” message if the cluster head field in the “Hello Join” is same asits own id. If it is not same, then the “Hello Join” message is ignored. Thus the clusteris formed once the cluster head accepts the “Hello Join” from a pedestrian with statusas cluster member. The steps for the cluster joining process are mentioned in the belowalgorithm 5.1.
Unicast is not supported for non-safety messages yet in Veins 4.3. So when a clustermember wants to send “Hello Join” message to its cluster head, then it simply broadcaststhe message with the cluster head id as one of its message fields. When the cluster headreceives this message, it verifies whether its own id matches with the cluster head idpresent in the message. If it matches, then it accepts the “Hello Join” and thus a clusteris formed. Otherwise, it ignores the received “Hello Join” message.
1: % Notation used: Rx = Receiver Pedestrian and Tx = Sender Pedestrian2: % Comment: Pedestrian starts walking on a sidewalk3: if (Received “Hello Invite” == true) then4: % Comment: Compare Rx and Tx Direction, Speed and Distance5: if (Rx Direction == Tx Direction) && ((Rx Speed - Tx Speed) 6 0.9) &&
(Distance between Rx and Tx 6 5 m) then6: Set Cluster Head = Tx7: Set Cluster Member = Rx8: Send “Hello Join” message9: else
10: Ignore received message, since Rx and Tx parameters do not match11: end if12: else if (Received “Hello Join” == true) then13: if (Rx ID == Cluster Head) then14: Accepts the “Hello Join” message and cluster is formed15: else16: Ignore received message, since Rx ID is not same as cluster head ID17: end if18: else19: Send “Hello Invite” message20: end if
Algorithm 5.1 – Algorithm for Cluster Joining
Master thesis Jyoti Ranjan Rout 21

5 Cluster Formation Framework
5.2.1.2 Cluster Head Selection
In this part of the architecture, cluster head for pedestrians is selected based on theirdistance and direction from a particular vehicle. There are mainly four different messagesinvolved in this process as discussed below:
1. Vehicle Broadcast: A vehicle broadcast this message on CCH every 0.1 s. Thismessage is sent by the vehicles on CCH and is targeted towards the pedestrians.It contains the following parameters:
a) Message Name
b) Vehicle Direction
c) Vehicle Position
2. Broadcast Request: After receiving the vehicle broadcast message, a pedestrianbroadcast this message on SCH towards fellow pedestrians. It contains the belowparameters:
a) Message Name
b) Vehicle ID
c) Pedestrian ID
d) Vehicle Direction
e) Pedestrian Direction
f) Distance between Vehicle and Pedestrian
g) Pedestrian Position
3. Broadcast Response: This message is sent by the selected pedestrian clusterhead on SCH to the pedestrians who are in its range of communication. It containsthe following parameters:
a) Message Name
b) Vehicle ID
c) Cluster Head ID
d) Minimum Distance between Vehicle and Pedestrian
4. Pedestrian Broadcast: This message is sent by the pedestrian cluster head every0.5 s, targeted towards the vehicle on CCH. It contains the below parameters:
a) Message Name
b) Cluster Head ID
Master thesis Jyoti Ranjan Rout 22

5 Cluster Formation Framework
When a vehicle starts moving on a road, it transmits a safety message named “VehicleBroadcast” on CCH. This message contains vehicle id, the position obtained from GPScoordinates and its direction. This message is received by other vehicles and pedestriansif they are on CCH and within the transmission range. A pedestrian walking on asidewalk checks if its direction is same or perpendicular to the direction of travel ofthe vehicle. If the pedestrian direction is same or perpendicular to the direction ofthe vehicle, it stores its self-distance from the vehicle in a map (vehicle id, its own idand self-distance from the vehicle). Then the pedestrian transmits this informationin “Broadcast Request” message on SCH towards other pedestrians. This process isrepeated each time the pedestrian receives safety message from a new vehicle. Thepedestrian updates its self-distance in the map if it receives the safety message from thesame vehicle again. The pedestrian which receives “Broadcast Request” would check ifthe direction of the sender is same as its own direction of travel. It also checks if itsdistance between the sender is less than equal to 5 m because cluster radius is assumedto be 5 m, considering a realistically feasible traffic scenario. It accepts the receivedmessage for minimum distance calculation if the direction is same and distance is lessthan 5 m, otherwise, it ignores the received message. The pedestrian stores the distancebetween the vehicles and others pedestrians in an array (vehicle id, pedestrian id andthe distance between them). This process is repeated each time it receives “BroadcastRequest” message from a new pedestrian. The pedestrian updates the distance in thearray if it receives the “Broadcast Request” message from the same pedestrian. Thepedestrian calculates the minimum distance in the array for a specific vehicle. Then thepedestrian compares its self-distance with the minimum distance for the same vehicle.The pedestrian transmits “Broadcast Response” message if its self-distance is less thanthe minimum distance and thus become the cluster head for that vehicle. If its distancefrom the vehicle is not minimum, then it does not send any message. The selectedpedestrian cluster head transmit safety message named “Pedestrian Broadcast” on CCHto alert the vehicle. Other pedestrians on CCH receiving this message would ignore it.The steps involved in this process are mentioned in algorithm 5.2.
5.2.2 Cluster Maintenance
In cluster maintenance, the complete steps of the cluster joining and the cluster headselection procedures are discussed. The vehicles and the pedestrians broadcast beaconwith an interval of 0.1 s and 0.5 s respectively on CCH. The pedestrians broadcast datawith an interval of 0.1 s on SCH. For the pedestrians, switching between CCH andSCH is configured every 50 ms. Figure 5.1 shows a pictorial representation of the entireclustering algorithm.
Master thesis Jyoti Ranjan Rout 23

5 Cluster Formation Framework
1: % Notation used: Rx = Receiver Pedestrian and Tx = Sender Pedestrian2: % Comment: Vehicle moving on the road broadcast their position and direction on
CCH every 0.1 s3: % Comment: Pedestrian walking on the sidewalk4: Vehicle send “Vehicle Broadcast” on CCH5: Pedestrians and other vehicles receive this message on CCH6: if (Received “Vehicle Broadcast” == true) then7: Pedestrian which receives this message checks if direction of vehicle is same or
perpendicular or opposite to its own direction of travel8: if (Direction of vehicle is same or perpendicular to direction of pedestrian then9: Pedestrian calculate self-distance from the vehicle
10: Pedestrian send “Broadcast Request” on SCH11: else12: Ignore received message, since direction of vehicle is opposite13: end if14: else if (Received “Broadcast Request” == true) then15: if (Direction of Rx == Direction of Tx) && (Distance between Rx and Tx 6 5
m) then16: Every pedestrian find minimum distance among all the distances received from
other pedestrians for the same vehicle17: if (Pedestrian self-distance < minimum distance) then18: It transmit “Broadcast Response” on SCH mentioning its id as cluster head
for the specific vehicle and also transmit “Pedestrian Alert” on CCH targetedtowards that vehicle
19: else20: Pedestrian self distance is not minimum from the vehicle21: end if22: else23: Ignore received message, since direction and distance parameter do not match24: end if25: else if (Received “Broadcast Response” == true) then26: if ((Direction of Rx == Direction of Tx) then27: Accept received message28: else29: Ignore received message, since direction parameter do not match30: end if31: else if (Received “Pedestrian Broadcast” == true) then32: Pedestrians on CCH ignore this message, as it is for vehicles33: Vehicle receive the message on CCH34: else35: No messages received yet by pedestrians36: end if
Algorithm 5.2 – Algorithm for Cluster Head Selection
Master thesis Jyoti Ranjan Rout 24

5 Cluster Formation Framework
Pedestrian start walking on sidewalk and vehicle
start moving on road
Pedestrian calculate self distance from vehicle and transmit
Broadcast Request on SCH
Vehicle transmit Vehicle Broadcast and
Pedestrian Receive it on CCH
Pedestrian receive Broadcast Request and compute
minimum distance among all received distances from other
pedestrians for same vehicle.
Pedestrian becomes cluster head and transmit Broadcast
Response and Hello Invite on SCH
Pedestrian receive Hello Invite on SCH and compare its
distance, direction and speed with the cluster head
Is cluster head
distance <= 5 m & direction is same & speed
<= 0.9 m/s
Pedestrian become cluster member and transmit Hello
Join on SCH and cluster head accept it if own id present in
cluster head field in message
Pedestrian cluster is formed
Yes
NoPedestrian Cannot
become cluster
member
Is
Pedestrian self distance < minimum distance
for same vehicle
No
Yes
Yes
Yes
Yes
Yes
Yes
Yes
Yes
Yes
Pedestrian cannot
become cluster head
Is
travel direction of pedestrian = travel
direction of vehicle
NoPedestrian cannot
consider vehicle for
distance calculation
Figure 5.1 – Pictorial Representation of Clustering Algorithm
Master thesis Jyoti Ranjan Rout 25

5 Cluster Formation Framework
The time required to form a cluster is the time pedestrians receive “Vehicle Broadcast”message from a vehicle and the cluster head receive “Hello Join” message from thecluster member. The cluster longevity with respect to a particular vehicle can be foundin the next page.
1. Assign a flag for each pedestrian and initialize it to −1.
2. Once a pedestrian become a cluster head, set its flat to 1 and 0 for cluster members.
3. Record this time stamp, let’s say it is T1 s.
4. If a cluster member becomes the new cluster head for the same vehicle, thenupdate its flag from 0 to 1 and for the existing cluster head, from 1 to 0.
5. Again record the time stamp, let’s say it is T2 s.
6. The cluster longevity would be T2 − T1 s.
Master thesis Jyoti Ranjan Rout 26

Chapter 6
Network Design and Implementation
In this chapter, the simulators and framework are discussed. Implementation of theproposed of cluster formation framework mentioned in chapter 5 is described here.
6.1 Simulators and Software
Simulators and software used for the design and implementation of the cluster formationalgorithm are installed on a Linux operating system (Gentoo). Veins, which is anopen source framework for VANET simulations is used for the implementation. It isbased on the open source event based network simulator OMNeT++ and road trafficsimulator SUMO. Table 6.1 lists the software and their versions which are used for theimplementation of the algorithm.
Table 6.1 – Software Versions
Software Version
Gentoo 2.2OMNeT++ 4.6SUMO 0.25Veins 4.3
6.1.1 OMNeT++
OMNeT++ [28] is an open source, discrete event simulator based on C++. It is anextensible, modular framework mainly used for building network simulators. Differenttypes of domain support such as sensor networks, wireless ad-hoc networks, performancemodeling, Internet protocols, etc. are given by model frameworks and developed byseparate projects. It provides an Eclipse Integrated Development Environment (IDE), a
Master thesis Jyoti Ranjan Rout 27

6 Network Design and Implementation
graphical environment for the simulator. OMNeT++ provides a component (module)architecture for models, based on C++. These modules are assembled into biggermodules using a Network Description Language (NED). The simulation kernel can beembedded into any application because of its modular architecture.
6.1.2 SUMO
SUMO [29] is an open source road traffic simulator developed by Germany AerospaceCenter DLR. It provides modeling of traffic systems which include vehicles, pedestriansand public transport. It can be customized as per our requirement to model the desiredsimulation map. The files are written in Extensible Markup Language (XML) and canbe modified as per our need. There are several files for configuring junctions, edges,connections and routes of different vehicles.
6.1.3 Veins
Veins [30] is an open source network simulation framework used for vehicular networks.Simulation in veins is carried out by executing OMNeT++ and SUMO simulators whichare connected by a TCP socket. Traffic Control Interface (TraCI) is a protocol used forthis connection. TraCI helps in the bidirectional coupling of network and road traffic.Vehicles and pedestrians in SUMO are represented as nodes in OMNeT++ simulationenvironment. DSRC Channel 178 is assigned for CCH and channel 174 is assigned forSCH in Veins. Figure 6.1 shows the modular structure of Veins.
SUMO
OMNeT++
VeinsChannel
Physical Layer
MobilityMAC
Application Layer
Sim
ula
tio
n
Co
ntr
ol
Data
Co
llec
tion
TraCI
Figure 6.1 – Veins Modular Structure [30]
Master thesis Jyoti Ranjan Rout 28

6 Network Design and Implementation
6.2 Implementation
The designed clustering algorithm can be implemented as an application on a smartphone.As the pedestrian may not look every time at their smartphone while walking or crossinga road, its DSRC interface is assumed to work on passive mode. Vehicle broadcastsafety message periodically on CCH. Also, the smartphone (pedestrian cluster head)periodically broadcast safety messages on CCH without human intervention. The vehicleis configured to be always on CCH and would receive these broadcast alert messagefrom the pedestrian on its DSRC enabled device.
Figure 6.2 – Simulation Scenario of Road Intersection
6.2.1 Configuration in SUMO
An unobstructed road map area 500 m × 500 m has been created consisting of a trafficintersection as shown in figure 7.1. It includes two-lane road for each direction and asidewalk on both sides of the road. The maximum speed of vehicles and pedestrians hasbeen considered to be 14 m/s and 1.5 m/s respectively. The pedestrians are assumedto walk on the right sidewalk of a road. It is also assumed that a pedestrian walks till
Master thesis Jyoti Ranjan Rout 29

6 Network Design and Implementation
the road intersection or starts walking from an intersection. Pedestrians crossing anintersection is not considered in this implementation.
6.2.2 Configuration in Veins and OMNeT++
In vehicular networks, for an unobstructed stretch of road, a simple path loss modelwould not consider ground reflection effects. For this reason, a Two-Ray Interferencemodel has been considered to take into account the ground reflection effects. Equation6.1 is used to calculate the distance which gives us the transmission range of the vehiclesand the pedestrians.
Pr = PtGh2t h2
r
d4 (6.1)
where, Pt = Transmitted PowerG = Antenna Gain, which considered to be 1 in the simulatorht = Transmitter antenna height, considered to be 1hr = Receiver antenna height, also considered to be 1d = Distance between transmitter and receiverPr = Received power, considered as sensitivity, since Pr > receiver sensitivity
Transmission range of the vehicle is configured to be 400 m approximately, byconfiguring the transmission power and receiver sensitivity. To set the transmissionrange for the pedestrians, the reaction time of the vehicle is taken into account. Signalattenuation is configured accordingly. The reaction time of a vehicle is the minimumtime required to stop after receiving an alert message from pedestrian. This time isassumed to be 7 to 8 s. Since the speed of the vehicle is assumed to be 14 m/s, it needsto travel 98 m to be able to come to a complete stop in 7 s. Based on this assumption,the transmission range of the pedestrian is configured as 100 m approximately. Toimitate a realistic traffic scenario, the cluster radius is assumed to be 5 m. As thetransmission range of a vehicle is 400 m, a pedestrian receives it if in range. If thepedestrians receive safety message from a vehicle which is at a distance of more than100 m, they would form a cluster for that vehicle. Then the pedestrian cluster head willtry to transmit the safety message to that vehicle which will eventually fail because thetransmission range of a pedestrian is configured as 100 m. To avoid this situation, thesignal attenuation is increased and adjusted accordingly. This will affect the receptionof safety messages exchange between the vehicles, but then again, this factor is notconsidered in the clustering algorithm detailed in the treatise.
Master thesis Jyoti Ranjan Rout 30

6 Network Design and Implementation
Various parameters that are considered for the implementation are listed in table 6.2.Switching of channels between CCH and SCH has been enabled for pedestrian and notfor the vehicle. Beacon is the safety message sent on CCH and data is the non-safetymessage sent on SCH. The CCH interval for broadcasting safety message is set to 0.1 sfor vehicle and 0.5 s for the pedestrian. The configuration of pedestrian sending data onSCH has been implemented and the data interval is set to 0.1 s. To configure pedestrianin veins, a new NED file named “Ped.ned” has been created similar to the existing“Car.ned”. The existing file “TraCIDemo11p” has been modified to enable the vehicleto transmit “Vehicle Broadcast” and receive “Pedestrian Broadcast” message on CCH.Similarly to enable pedestrian to transmit “Pedestrian Broadcast” and receive “VehicleBroadcast” message on CCH, a new file “PedCluster” has been created. The clusteringalgorithm has been implemented in this file where pedestrian transmits/receive non-safety messages on SCH. The vehicles and pedestrians are identified by their uniquenode ids in the simulation. The parameters related to veins are configured in OMNeT++configuration settings file named “omnetpp.ini”.
Table 6.2 – Implementation Parameters
Parameter Value
Propagation Model Two-Ray InterferenceRoad Map Area 500 m × 500 mVehicle Tx Range 400 m (approx)Vehicle Maximum Speed 14 m/sVehicle Beacon Interval 0.1 sPedestrian Tx Range 100 m (approx)Pedestrian Maximum Speed 1.5 m/sPedestrian Beacon Interval 0.5 sPedestrian Data Interval 0.1 sPedestrian Cluster Radius 5 m
Master thesis Jyoti Ranjan Rout 31

Chapter 7
Simulation Results and Analysis
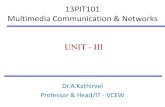
In this chapter, the simulation results of cluster formation algorithm is analysed andevaluated and later compared with the results obtained without employing clustering.Simulations are executed with the software and their versions mentioned in section 6.1.Each simulation is run with three seeds configured in OMNeT++ configuration file. Theaverage data obtained from the output of the simulation run is considered for calculationand plotting graphs. Two different traffic scenarios are planned for simulation, oneis sparse and the other is dense. The metrics considered for analyzing the simulationresults are CCH message/packet count and total packet loss. The total number ofpackets sent by pedestrians and the average number of packets received by a vehicleon CCH are considered when analyzing the results. The total number of packet lossinclude SNIR (Signal to Noise and Interference Ratio) packet loss and RxTx (Receptionand Transmission) packet loss. The configuration to count the number of packets sentand received on CCH is made in Veins.
7.1 Comparison and Analysis of Sparse Traffic ScenarioResults
In the sparse traffic scenario, the total number of pedestrians and vehicles are configuredto be 24 and 12 respectively. The results are generated by taking a snapshot of 30 sduration, configured in the OMNeT++. Recording of desired packet count is configuredto begin at the simulation time of 10 s called as warm-up period which ends at 40 s.This duration of 30 s is determined as the time during which all the vehicles are presentin the simulation. This method provides the output for a period of full traffic load.Figure 7.1 shows a comparison between the results obtained with clustering and
without clustering based on total number of packets sent by pedestrians on CCH. In
Master thesis Jyoti Ranjan Rout 32

7 Simulation Results and Analysis
without clustering scenario, the total number of packets transmitted by pedestrians onCCH is 1440. With clustering, pedestrians transmit 1254 packets on CCH. There is areduction of about 13 % in the total of CCH packets transmitted by pedestrians, thusjustifying the reduction of CCH usage as a result of using the clustering mechanism.
1150 1200 1250 1300 1350 1400 1450 1500
Without Clustering
With Clustering
Total no. of packets transmitted by pedestrians on CCH
Figure 7.1 – Comparison based on total no. of packets transmitted by pedestrianson CCH
Figure 7.2 shows the comparison of an average number of packets received by a vehicleon CCH in both scenarios. In without clustering the average number of packets receivedby each vehicle is 487. With clustering, each vehicle receives 414 packets on CCH. Theresults show that there is a reduction of about 15 % in the average number of packetsreceived by a vehicle. This data shows that the message overhead on CCH is reducedto a considerable amount due to the implementation of the clustering algorithm. Thedifference in the number of packets transmitted by pedestrians and received by vehiclesmay be due to packet loss or any transmission/reception errors. There is no considerableamount of packet loss on CCH in sparse traffic scenario, but it could be more in a densetraffic scenario.
7.2 Evaluation
These obtained results imply that the use of SCH for clustering helps in reducing theCCH usage to a considerable level. This can certainly reduce the number of messages
Master thesis Jyoti Ranjan Rout 33

7 Simulation Results and Analysis
360 380 400 420 440 460 480 500
Without Clustering
With Clustering
Average no. of packets received by a vehicle on CCH
Figure 7.2 – Comparison based on average no. of packets received by a vehicleon CCH
generated by the pedestrians targeted towards the vehicles on CCH. This in turn, wouldreduce the CCH overload in V2V communication due to the effect of clustering.
As per the designed algorithm and observation from the simulation, channel switchingbetween CCH and SCH happens every 50 ms for the pedestrian. The safety message(beacon) interval and the non-safety message (data) interval is configured as 0.5 s and0.1 s respectively. As a pedestrian switches to SCH every 0.1 s, “Hello Invite” messageis being transmitted every 0.1 s, even if it is the cluster head for the same vehicle. It isimportant to note that the pedestrian cluster head transmits safety message towards thevehicle every 0.5 s. After receiving “Vehicle Broadcast” message on CCH, the pedestriancluster is formed within a period of 0.1 s on SCH.
A dense traffic scenario of 120 pedestrians and 80 vehicles with the clustering imple-mentation detailed in this thesis could not be simulated due to time constraints. Thecluster formation period may be postulated to increase in the dense traffic scenes.
Master thesis Jyoti Ranjan Rout 34

Chapter 8
Conclusion and Future Work
8.1 Conclusion
In this report, an overview of DSRC/WAVE system and various scenarios of V2Pcommunication are discussed. Several clustering parameters are studied from variousclustering mechanisms in VANET and MANET. The proposed cluster formationframework for P2P communication is designed and implemented. The cluster wasformed on SCH based on the parameters received in the safety message from the vehicleson CCH. Simulations are performed with and without the clustering for a sparse trafficscenario. The simulation result obtained in both the cases are compared and analyzed.The result shows that, with the cluster formation on SCH, the number of messages on thededicated CCH targeted towards the vehicles are reduced in V2P communication. Thereason behind this behavior is that only the pedestrian cluster head broadcasts safetymessage towards the vehicle on the dedicated channel. It can also be inferred that dueto the clustering mechanism the overhead of safety messages on the dedicated channelin V2V communication has reduced. It can be concluded that the use of non-safetySCH for clustering helps to reduce the channel congestion caused by enabling V2Pcommunication to a considerable level.
8.2 Future Work
As of now, the clustering algorithm is simulated for a sparse traffic scenario of vehiclesand pedestrians. Simulations can be performed for a dense traffic environment toanalyze and compare the results. Finally, the proposed method to compute longevityof a pedestrian cluster with respect to a particular vehicle can be implemented andmeasured.
Master thesis Jyoti Ranjan Rout 35

Bibliography
[1] “IEEE Guide for Wireless Access in Vehicular Environments (WAVE) - Architec-ture,” IEEE Std 1609.0-2013, pp. 1–78, March 2014.
[2] “IEEE Standard for Wireless Access in Vehicular Environments Security Servicesfor Applications and Management Messages,” IEEE Std 1609.2-2013 (Revision ofIEEE Std 1609.2-2006), pp. 1–289, April 2013.
[3] “IEEE Standard for Wireless Access in Vehicular Environments (WAVE) - Net-working Services,” IEEE Std 1609.3-2010 (Revision of IEEE Std 1609.3-2007), pp.1–144, Dec 2010.
[4] “IEEE Standard for Wireless Access in Vehicular Environments (WAVE)–Multi-channel Operation,” IEEE Std 1609.4-2010 (Revision of IEEE Std 1609.4-2006),pp. 1–89, Feb 2011.
[5] Y. Li, “An Overview of the DSRC/WAVE Technology,” in Lecture Notes of theInstitute for Computer Sciences, Social Informatics and Telecommunications Engi-neering, X. Zhang and D. Qiao, Eds., vol. 74. Springer, 2010, pp. 544–558.
[6] Online Stand: December 2016. [Online]. Available: http://www.mto.gov.on.ca/english/safety/pedestrian-safety.shtml
[7] Y. Park, J. Ha, S. Kuk, H. Kim, C. J. M. Liang, and J. Ko, “A Feasibility Studyand Development Framework Design for Realizing Smartphone-Based VehicularNetworking Systems,” IEEE Transactions on Mobile Computing, vol. 13, no. 11,pp. 2431–2444, Nov 2014.
[8] X. Wu, S. Subramanian, R. Guha, R. G. White, J. Li, K. W. Lu, A. Bucceri, andT. Zhang, “Vehicular Communications Using DSRC: Challenges, Enhancements,and Evolution,” IEEE Journal on Selected Areas in Communications, vol. 31, no. 9,pp. 399–408, September 2013.
Master thesis Jyoti Ranjan Rout 36

BIBLIOGRAPHY
[9] X. Wu, R. Miucic, S. Yang, S. Al-Stouhi, J. Misener, S. Bai, and W. H. Chan,“Cars Talk to Phones: A DSRC Based Vehicle-Pedestrian Safety System,” in IEEE80th Vehicular Technology Conference (VTC2014-Fall), Sept 2014, pp. 1–7.
[10] T. Gandhi and M. M. Trivedi, “Pedestrian Protection Systems: Issues, Survey,and Challenges,” IEEE Transactions on Intelligent Transportation Systems, vol. 8,no. 3, pp. 413–430, Sept 2007.
[11] S. Fujikami, T. Sumi, R. Yagiu, and Y. Nagai, “Fast Device Discovery for Vehicle-to-Pedestrian communication using wireless LAN,” in 12th Annual IEEE ConsumerCommunications and Networking Conference (CCNC), Jan 2015, pp. 35–40.
[12] J. J. Anaya, P. Merdrignac, O. Shagdar, F. Nashashibi, and J. E. Naranjo, “Vehicleto Pedestrian Communications for Protection of Vulnerable Road Users,” in IEEEIntelligent Vehicles Symposium Proceedings, June 2014, pp. 1037–1042.
[13] K. David and A. Flach, “CAR-2-X and Pedestrian Safety,” IEEE Vehicular Tech-nology Magazine, vol. 5, no. 1, pp. 70–76, March 2010.
[14] S. M. Almheiri and H. S. Alqamzi, “MANETs and VANETs Clustering Algorithms:A Survey,” in 8th IEEE GCC Conference and Exhibition (GCCCE), Feb 2015, pp.1–6.
[15] S. Y. Ni, Y. C. Tseng, Y. S. Chen, and J. P. Sheu, “The Broadcast Storm Problemin a Mobile Ad Hoc Network,” Wireless Networks, vol. 8, no. 2, pp. 153–167, 2002.
[16] G. Wolny, “Modified DMAC Clustering Algorithm for VANETs,” in Third Inter-national Conference on Systems and Networks Communications, Oct 2008, pp.268–273.
[17] C. Shea, B. Hassanabadi, and S. Valaee, “Mobility-Based Clustering in VANETsUsing Affinity Propagation,” in IEEE Global Telecommunications Conference,GLOBECOM, Nov 2009, pp. 1–6.
[18] N. Maslekar, M. Boussedjra, J. Mouzna, and H. Labiod, “A Stable ClusteringAlgorithm for Efficiency Applications in VANETs,” in 7th International WirelessCommunications and Mobile Computing Conference, July 2011, pp. 1188–1193.
[19] L. C. Tung, J. Mena, M. Gerla, and C. Sommer, “A cluster based architecturefor intersection collision avoidance using heterogeneous networks,” in 12th AnnualMediterranean Ad Hoc Networking Workshop (MED-HOC-NET), June 2013, pp.82–88.
Master thesis Jyoti Ranjan Rout 37

BIBLIOGRAPHY
[20] H. Nishiyama, T. Ngo, S. Oiyama, and N. Kato, “Relay by Smart Device: InnovativeCommunications for Efficient Information Sharing Among Vehicles and Pedestrians,”IEEE Vehicular Technology Magazine, vol. 10, no. 4, pp. 54–62, Dec 2015.
[21] S. Xu, B. Shen, and S. Lee, “A Study on Clustering Algorithm of VANET Envi-ronment,” in 3rd IEEE International Conference on Network Infrastructure andDigital Content, Sept 2012, pp. 204–208.
[22] P. Basu, N. Khan, and T. D. C. Little, “A Mobility Based Metric for Clusteringin Mobile Ad Hoc Networks,” in Distributed Computing Systems Workshop, 2001International Conference on, Apr 2001, pp. 413–418.
[23] S. Basagni, “Distributed Clustering for Ad Hoc Networks,” in Fourth Interna-tional Symposium on Parallel Architectures, Algorithms, and Networks, (I-SPAN)Proceedings, 1999, pp. 310–315.
[24] A. H. Hussein, A. O. Abu Salem, and S. Yousef, “A flexible weighted cluster-ing algorithm based on battery power for Mobile Ad hoc Networks,” in IEEEInternational Symposium on Industrial Electronics, June 2008, pp. 2102–2107.
[25] M. Alinci, E. Spaho, A. Lala, and V. Kolici, “Clustering Algorithms in MANETs: AReview,” in Ninth International Conference on Complex, Intelligent, and SoftwareIntensive Systems (CISIS), July 2015, pp. 330–335.
[26] R. Agarwal and M. Motwani, “Survey of Clustering Algorithms for MANET,”International Journal on Computer Science and Engineering, vol. 1, no. 2, pp.98–104, Dec 2009.
[27] G. Chen, F. G. Nocetti, J. S. Gonzalez, and I. Stojmenovic, “Connectivitybased k-hop clustering in wireless networks,” in Proceedings of the 35th AnnualHawaii International Conference on System Sciences, 2002. HICSS, Jan 2002, pp.2450–2459.
[28] Online Stand: December 2016. [Online]. Available: https://omnetpp.org
[29] D. Krajzewicz, J. Erdmann, M. Behrisch, and L. Bieker, “Recent development andapplications of SUMO - Simulation of Urban MObility,” International Journal OnAdvances in Systems and Measurements, vol. 5, no. 3&4, pp. 128–138, December2012.
[30] Online Stand: December 2016. [Online]. Available: http://veins.car2x.org
Master thesis Jyoti Ranjan Rout 38

List of Figures
2.1 WAVE Architecture [1] . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.2 DSRC Frequency Spectrum [5] . . . . . . . . . . . . . . . . . . . . . . . 62.3 DSRC TDMA Frame [5] . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
3.1 A co-existence of V2V, V2P and P2P communication . . . . . . . . . . . 83.2 Pedestrians walking on sidewalk . . . . . . . . . . . . . . . . . . . . . . . 93.3 Pedestrians crossing a road intersection [6] . . . . . . . . . . . . . . . . . 9
5.1 Pictorial Representation of Clustering Algorithm . . . . . . . . . . . . . 25
6.1 Veins Modular Structure [30] . . . . . . . . . . . . . . . . . . . . . . . . 286.2 Simulation Scenario of Road Intersection . . . . . . . . . . . . . . . . . . 29
7.1 Comparison based on total no. of packets transmitted by pedestrians onCCH . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
7.2 Comparison based on average no. of packets received by a vehicle on CCH 34
Master thesis Jyoti Ranjan Rout 39

List of Tables
6.1 Software Versions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 276.2 Implementation Parameters . . . . . . . . . . . . . . . . . . . . . . . . . 31
Master thesis Jyoti Ranjan Rout 40

List of Acronyms
CCH Control Channel
DSRC Dedicated Short Range Communication
GPS Global Positioning System
IDE Integrated Development Environment
IPv6 Internet Protocol version 6
ITS Intelligent Transport System
MAC Medium Access Control
MANET Mobile Ad Hoc Network
NED Network Description Language
OFDM Orthogonal Frequency Division Multiplexing
OMNeT++ Objective Modular Network Testbed in C++
SCH Service Channel
SUMO Simulation of Urban Mobility
TDM Time Division Multiplexing
TraCI Traffic Control Interface
V2I Vehicle-to-Infrastructure
V2P Vehicle-to-Pedestrian
V2V Vehicle-to-Vehicle
VANET Vehicular Ad Hoc Network
Master thesis Jyoti Ranjan Rout 41

Veins Vehicle In Network Simulation
WAVE Wireless Access in Vehicular Environment
WLAN Wireless Local Area Network
WSM WAVE Short Message
WSMP WAVE Short Message Protocol
XML Extensible Markup Language

Erklärung
Die vorliegende Arbeit habe ich selbstständig ohne Benutzung anderer als der angegebe-nen Quellen angefertigt. Alle Stellen, die wörtlich oder sinngemäß aus veröffentlichtenQuellen entnommen wurden, sind als solche kenntlich gemacht. Die Arbeit ist in gleicheroder ähnlicher Form oder auszugsweise im Rahmen einer oder anderer Prüfungen nochnicht vorgelegt worden.
(Jyoti Ranjan Rout)Ilmenau, 14. 01. 2017
Master thesis Jyoti Ranjan Rout 43

Declaration
I hereby declare that this thesis was created autonomously without using other than thestated references. All parts which are cited directly or indirectly are marked as such.This thesis has not been used in the same or similar forms in parts or total in otherexaminations.
(Jyoti Ranjan Rout)Ilmenau, 14. 01. 2017
Master thesis Jyoti Ranjan Rout 44