COLLISION AVOIDANCE VEHICLE
33
Mini Project Report 2014 ACKNOWLEDGEMENT At the outset, I express my gratitude to the almighty who has been with me during each and every step that I have taken towards the completion of this Mini project. Wi th great plea sure, I exp ress my dee p sense of grati tud e to Dr. K. Rajiv Kumar, ead !epartment of instrumentation for giving his valuable help and guidance in preparation of my Mini project. I express my heartfelt gratitude to Mrs. Arc hana Mohan, !epartment of instrumentation for her valuable assistance and advice for presenting this Mini project I also express my thanks to all other faculties of Instrumentation and "ontrol #ngineering !epartment for giving their valuable cooperation. I expre ss my grati tude to all my friends for thei r help, co$op erati on and encouragement. %
-
Upload
arjun-v-prasanthan -
Category
Documents
-
view
21 -
download
0
description
Nowadays the industries are preferring robot rather than human for labours because of more production result. Our aim of this project was to develop a Collision Avoidance Mobile Robot with onboard sensor and a PIC Microcontroller. The mobile robot designed is capable of moving in an environment which has obstacles avoiding collision.In this mobile robot we are providing IR sensor for the detection of obstacles which is mounded on a dc motor for scanning its surrounding area. The algorithm runs on the PIC Microcontroller based on the information received by the IR range. We are providing four basic directions for this robot forward, backward, right, and left.
Transcript of COLLISION AVOIDANCE VEHICLE
7/21/2019 COLLISION AVOIDANCE VEHICLE
http://slidepdf.com/reader/full/collision-avoidance-vehicle 1/33
Mini Project Report 2014
ACKNOWLEDGEMENT
At the outset, I express my gratitude to the almighty who has been with
me during each and every step that I have taken towards the completion of this
Mini project.
With great pleasure, I express my deep sense of gratitude to Dr. K.
Rajiv Kumar, ead !epartment of instrumentation for giving his valuable
help and guidance in preparation of my Mini project.
I express my heartfelt gratitude to Mrs. Archana Mohan, !epartment
of instrumentation for her valuable assistance and advice for presenting this
Mini project
I also express my thanks to all other faculties of Instrumentation and
"ontrol #ngineering !epartment for giving their valuable cooperation.
I express my gratitude to all my friends for their help, co$operation and
encouragement.
%
7/21/2019 COLLISION AVOIDANCE VEHICLE
http://slidepdf.com/reader/full/collision-avoidance-vehicle 2/33
Mini Project Report 2014
ABSTRACT
&owadays the industries are preferring robot rather than human for
labours because of more production result. 'ur aim of this project was to
develop a "ollision Avoidance Mobile (obot with onboard sensor and a )I"
Microcontroller. *he mobile robot designed is capable of moving in an
environment which has obstacles avoiding collision.
In this mobile robot we are providing I( sensor for the detection of
obstacles which is mounded on a dc motor for scanning its surrounding area.
*he algorithm runs on the )I" Microcontroller based on the information
received by the I( range. We are providing four basic directions for this robot
forward, backward, right, and left.
We are proving a particular range in )I" programming for I( sensor
known as threshold length. If the obstacles are within this threshold region or
length an interrupt is given to change the direction as in programming logic. .
)I" %+-A is used for programming and integrating two dc motor, motor
driver and I( sensor. In the program mounted, microcontroller will control the
movement of the vehicle and will control the operations of the attached
modules.
/
7/21/2019 COLLISION AVOIDANCE VEHICLE
http://slidepdf.com/reader/full/collision-avoidance-vehicle 3/33
Mini Project Report 2014
CONTENTS
Chap!r "a#! No
ACKNOWLEDGEMENT i
ABSTRACT ii
CONTENT iii
L$ST O% %$G&RES iv
'. $NTROD&CT$ON %
%.% 0cope and overview %
%./ 1asic operation %
%.2 Anti$collision system /
(. BLOCK D$AGRAM 3
). %LOW C*AT 4
+. C$RC&$T D$AGRAM +
. C$RC&$T E-"LANAT$ON
4.% Microcontroller
4./ I( sensor
4.2 !" motors -
2
7/21/2019 COLLISION AVOIDANCE VEHICLE
http://slidepdf.com/reader/full/collision-avoidance-vehicle 4/33
Mini Project Report 2014
4.3 5/62! -
4.4 )ower supply 6
4.+ 0erial "ommunication %7
4. Max /2/ %7
4.- 5M-74 %%
. CONCL&T$ON %2
RE%ERENCES v
A""END$-/' )rogram vi
A""END$-/( 0election of "omponents listed in ardware vi
3

7/21/2019 COLLISION AVOIDANCE VEHICLE
http://slidepdf.com/reader/full/collision-avoidance-vehicle 5/33
Mini Project Report 2014
L$ST O% %$G&RES
Ta01! No D!scripion "a#! No
i. Anti$"ollision 0ystem /ii. 1lock !iagram 3iii. low "hart 4
iv. "ircuit diagram +
v. )ower 0upply 6vi. 0erial "ommunication %7
vii. )in !iagram of MA8/2/ %7
viii. 5M-74 (egulator %%
4
7/21/2019 COLLISION AVOIDANCE VEHICLE
http://slidepdf.com/reader/full/collision-avoidance-vehicle 6/33
Mini Project Report 2014
$-. $NTROD&CT$ON
2.
xi. *he purpose of this project was to develop a mobile
robot with the collisions avoidance capability in an obstructed
environment. *he mobile robot has been built as a fully
autonomous vehicle with onboard sensors to get information about
the surrounding environment.
2ii.
'.' SCO"E AND O3ER3$EW
xiii. *he mobile robot is a four wheeled robot platform which
employs the differential steering mechanism for motion in given direction.
*wo dc motors have been used for the driving wheels. *he robot has an
onboard I( sensor which is mounted on the standard dc motor. *he dc Motor
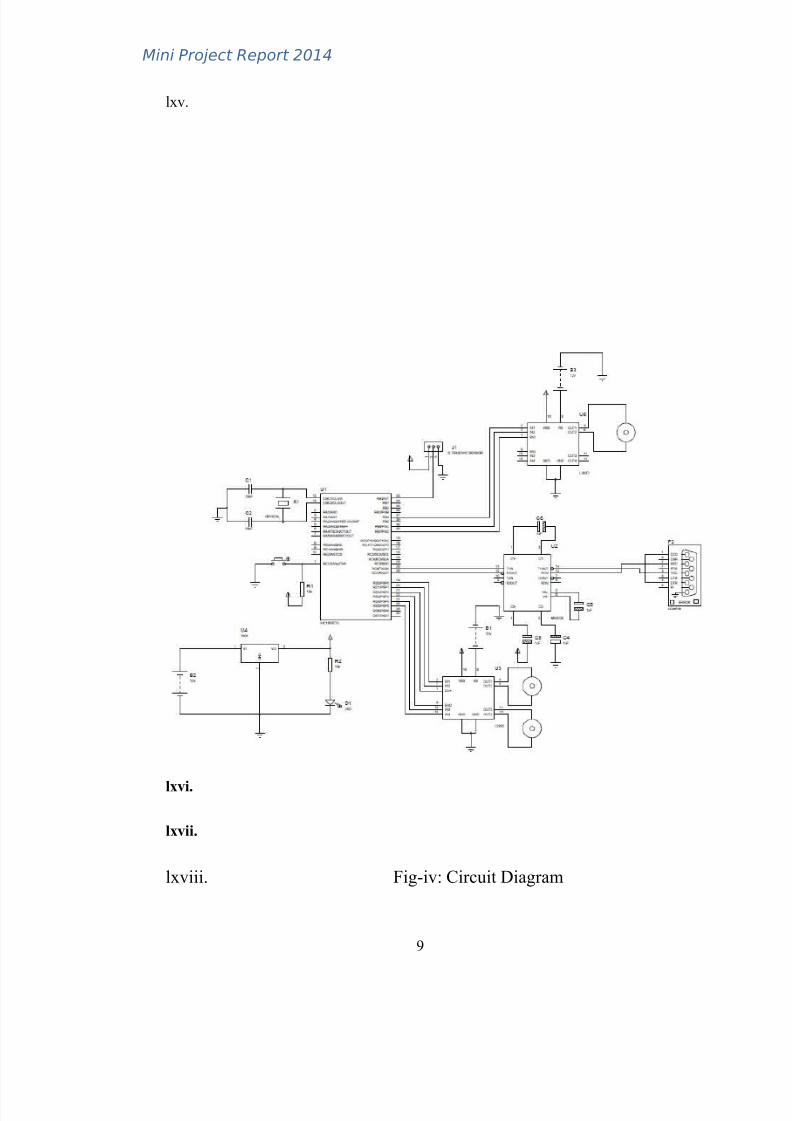
and the I( sensor are controlled by a dedicated )I" Microcontroller which
sends the control signal to motor driver 5/62! which control the action of
motor.
xiv. *he )otential ield method has been used as the obstacle avoidance
algorithm and the Algorithm is implemented in the main )I" microcontroller
which is on the mobile robot. *he Algorithm implemented is used to avoid
the obstacle and to drive the robot to a locally generated goal.
xv.
'.( BAS$C O"ERAT$ON
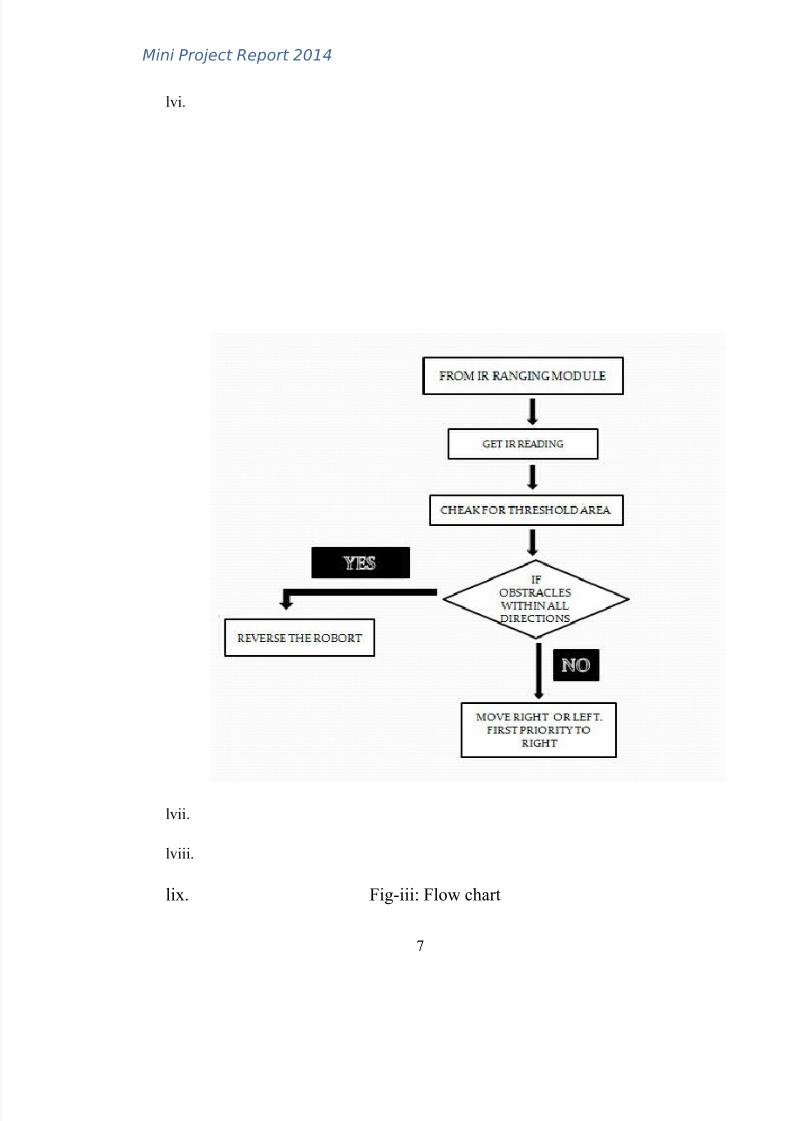
xvi. When the robot is switch on it scan its environment using I(
sensor. If any obstacle was detected the I( rays will get reflected and will
received by the receiving section. *he controller will check whether the
obstacle is
xvii. in given threshold region which was given by the programmer.
%
7/21/2019 COLLISION AVOIDANCE VEHICLE
http://slidepdf.com/reader/full/collision-avoidance-vehicle 7/33
Mini Project Report 2014
If it is not in the threshold length the )I" controller will just ignore it and if
xviii.
xix. it is in the threshold region the )I" controller will instruct the motor
driver to move the direction. *he scanning will continues until the system is
shutdown.
xx.
'.) ANT$/COLL$S$ON S4STEM
22i.
22ii.
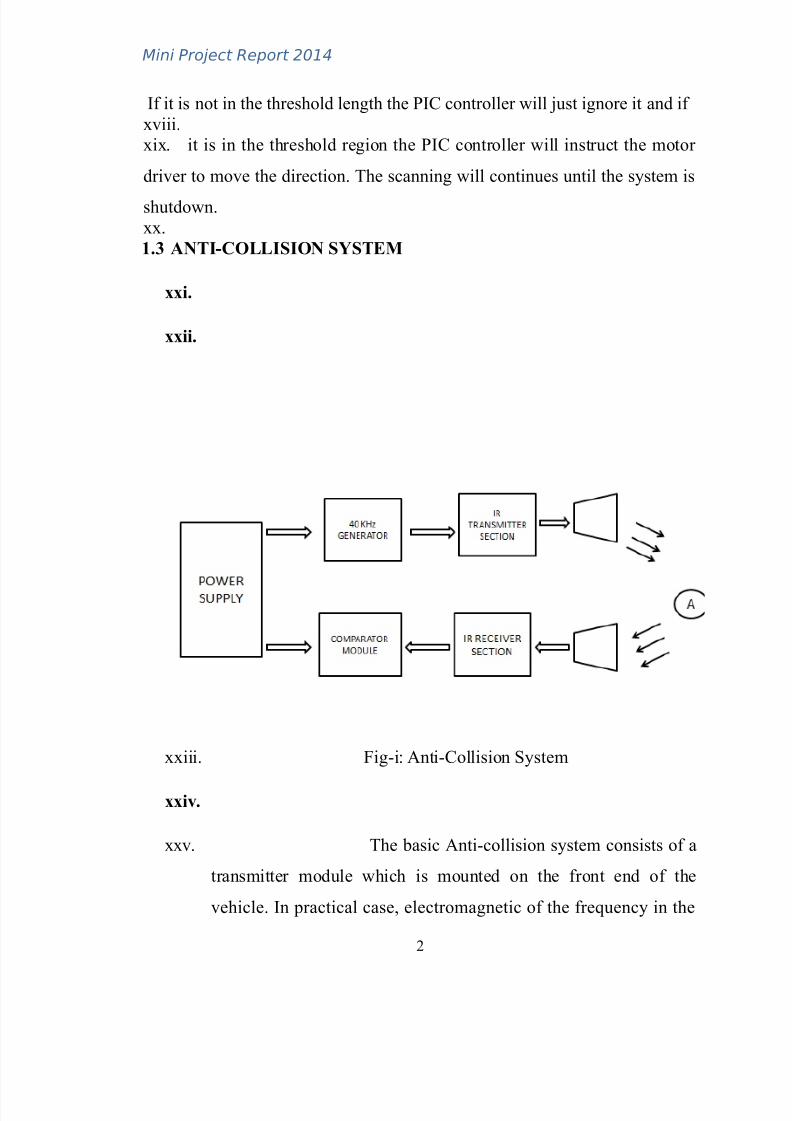
xxiii. ig$i9 Anti$"ollision 0ystem
22iv.
xxv. *he basic Anti$collision system consists of a
transmitter module which is mounted on the front end of the
vehicle. In practical case, electromagnetic of the fre:uency in the
/
7/21/2019 COLLISION AVOIDANCE VEHICLE
http://slidepdf.com/reader/full/collision-avoidance-vehicle 8/33
Mini Project Report 2014
range of I( or ultrasonic waves can be used. *he transmitter
transmits radio waves continuously in the forward direction.
Whenever an obstacle or any vehicle comes within a specific
distance in front of the vehicle, the radio waves incident on
them are
xxvi.
xxvii. reflected back to the vehicle. *hese reflected waves are collected
by a receiver module which is also mounted on the front end of the
vehicle. 'n the reception of these reflected waves, an alarm is
triggered which warns the driver to manually slow down the
vehicle if possible. If the driver fails to perform the re:uired action
within a few seconds, a solenoid valve in the vehicle fuel system
which is electronically controlled, reduces the fuel flow to the
engine there by slowing down the vehicle.
xxviii.
xxix.
222.
222i.
222ii.
222iii.
---$3.
xxxv.
xxxvi.
2
7/21/2019 COLLISION AVOIDANCE VEHICLE
http://slidepdf.com/reader/full/collision-avoidance-vehicle 9/33
Mini Project Report 2014
xxxvii.
---3$$$.
---$-.
xl.
xli.
-L$$. (. BLOCK D$AGRAM
xliii.
xliv.
3

7/21/2019 COLLISION AVOIDANCE VEHICLE
http://slidepdf.com/reader/full/collision-avoidance-vehicle 10/33
Mini Project Report 2014
-L3.
-L3$.
-L3$$. %$G/$$5 BLOCK D$AGRAMxlviii.
xlix.
l.
4
7/21/2019 COLLISION AVOIDANCE VEHICLE
http://slidepdf.com/reader/full/collision-avoidance-vehicle 11/33
Mini Project Report 2014
li.
lii.
liii. ). %LOW C*ART
1iv.
1v.
+
7/21/2019 COLLISION AVOIDANCE VEHICLE
http://slidepdf.com/reader/full/collision-avoidance-vehicle 12/33
Mini Project Report 2014
lvi.
lvii.
lviii.
lix. ig$iii9 low chart
7/21/2019 COLLISION AVOIDANCE VEHICLE
http://slidepdf.com/reader/full/collision-avoidance-vehicle 13/33
Mini Project Report 2014
lx.
12i.
12ii. +. C$RC&$T D$AGRAM
12iii.
12iv.
-
7/21/2019 COLLISION AVOIDANCE VEHICLE
http://slidepdf.com/reader/full/collision-avoidance-vehicle 14/33
Mini Project Report 2014
lxv.
12vi.
12vii.
lxviii. ig$iv9 "ircuit !iagram
6
7/21/2019 COLLISION AVOIDANCE VEHICLE
http://slidepdf.com/reader/full/collision-avoidance-vehicle 15/33
Mini Project Report 2014
lxix.
lxx.
122i.
122ii.
122iii. . C$RC&$T E-"LANAT$ON
122iv.
122v. .' M$CROCONTROLLER5 "$C'%677A
lxxvi. )I" is a family of modified arvard architecture
microcontrollers made by Microchip *echnology, derived from the
)I"%+47 originally developed by ;eneral Instrument<s
Microelectronics !ivision. *he name )I" initially referred to
=)eripheral Interface "ontroller=.
lxxvii. )I"s are popular with both industrial developers
and hobbyists alike due to their low cost, wide availability, large user
base, extensive collection of application notes, availability of low cost
or free development tools, and serial programming >and re$
programming with flash memory? capability. *hey are also commonly
used in educational programming as they often come with the easy to
use <pic logicator< software.
122viii. .( $R SENSOR
%7
7/21/2019 COLLISION AVOIDANCE VEHICLE
http://slidepdf.com/reader/full/collision-avoidance-vehicle 16/33
Mini Project Report 2014
lxxix. In the electromagnetic spectrum, infrared radiation is the region
having wavelengths longer than visible light wavelengths, but
shorter than microwaves. *he infrared region is approximately
demarcated from 7.4 to %777@m. *he wavelength region from
7.4 to 2@m is termed as near infrared, the region from 2 to +@m is
termed mid$infrared, and the region higher than +@m is termed as
far infrared.
lxxx.
lxxxi. Infrared technology is found in many of our everyday products.or example, * has an I( detector for interpreting the signal from
the remote control. Bey benefits of infrared sensors include low
power re:uirements, simple circuitry, and their portable feature.
1222ii.
1222iii. .) DC MOTORS
lxxxiv. A !" motor is a mechanically commutated electric motor
powered from direct current >!"?. *he stator is stationary in space
by definition and therefore so is its current. *he current in the rotor
is switched by the commutator to also be stationary in space. *his
is how the relative angle between the stator and rotor magnetic flux
is maintained near 67 degrees, which generates the maximumtor:ue.
lxxxv.!" motors have a rotating armature winding but non$rotating
armature magnetic field and a static field winding or permanent
%%
7/21/2019 COLLISION AVOIDANCE VEHICLE
http://slidepdf.com/reader/full/collision-avoidance-vehicle 17/33
Mini Project Report 2014
magnet. !ifferent connections of the field and armature winding
provide different inherent speedCtor:ue regulation characteristics.
*he speed of a !" motor can be controlled by changing the
voltage applied to the armature or by changing the field current.
*he introduction of variable resistance in the armature circuit or
field circuit allowed speed control. Modern !" motors are often
controlled by power electronics systems called !" drives.
lxxxvi. .+ L(8)D
lxxxvii. *he !evice is a monolithic integrated high voltage, high currentfour channel driver designed to accept standard !*5 or **5 logic
levels and drive inductive loads >such as relays solenoides, !"
and stepping motors? and switching power transistors. *o simplify
use as two bridges each pair of channels is e:uipped with an enable
input. A separate supply input is provided for the logic, allowing
operation at a lower voltage and internal clamp diodes are
included. *his device is suitable for use in switching applications
at fre:uencies up to 4 kD.
.+ "OWER S&""L4
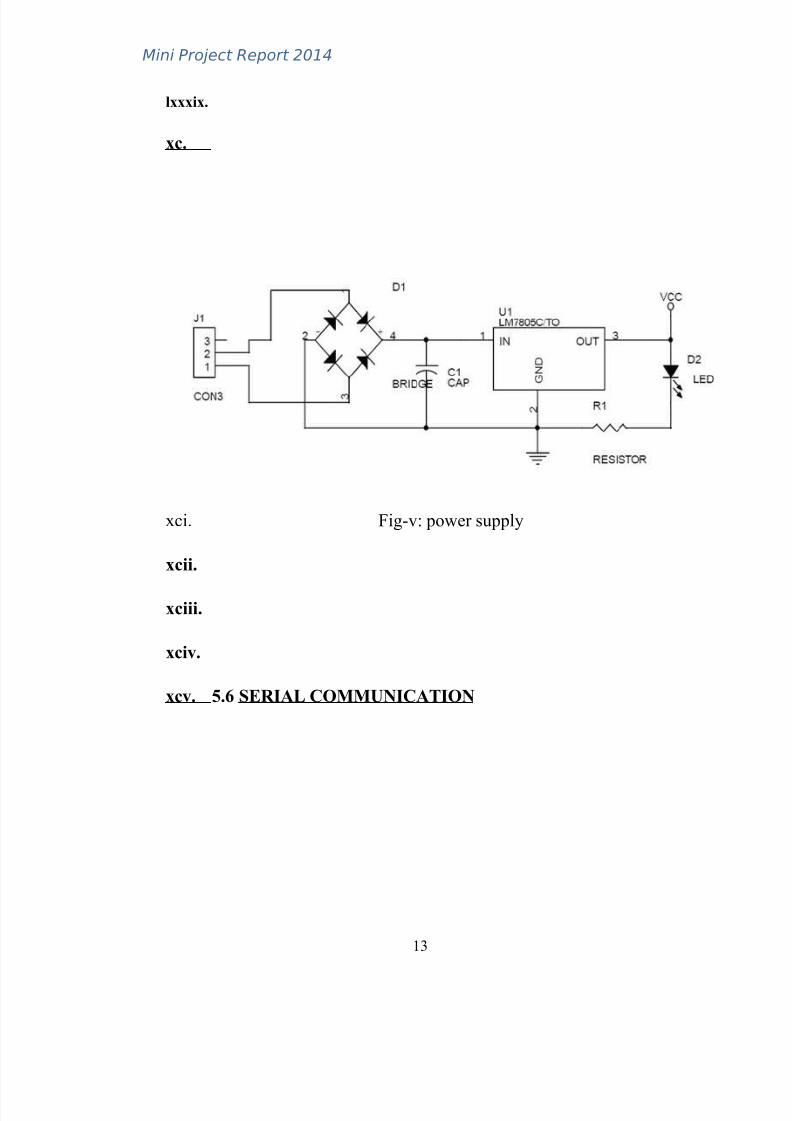
lxxxviii. ere the ac supply is fed into a bridge rectifier. *he bridge
rectifier converts the ac to pulsated dc volt. *he )I" need pure dc
supply of 4v. 0o it is then fed into a filter capacitor , %777u which
converts the pulsated dc to pure dc. It is then fed into a voltage
rectifier 5M-74 to convert into 4v supply. An indicator 5#! is
kept for power on off indication.
%/
7/21/2019 COLLISION AVOIDANCE VEHICLE
http://slidepdf.com/reader/full/collision-avoidance-vehicle 18/33
Mini Project Report 2014
1222i2.
2c.
xci. ig$v9 power supply
2cii.
2ciii.
2civ.
2cv. . SER$AL COMM&N$CAT$ON
%2
7/21/2019 COLLISION AVOIDANCE VEHICLE
http://slidepdf.com/reader/full/collision-avoidance-vehicle 19/33
Mini Project Report 2014
xcvi.
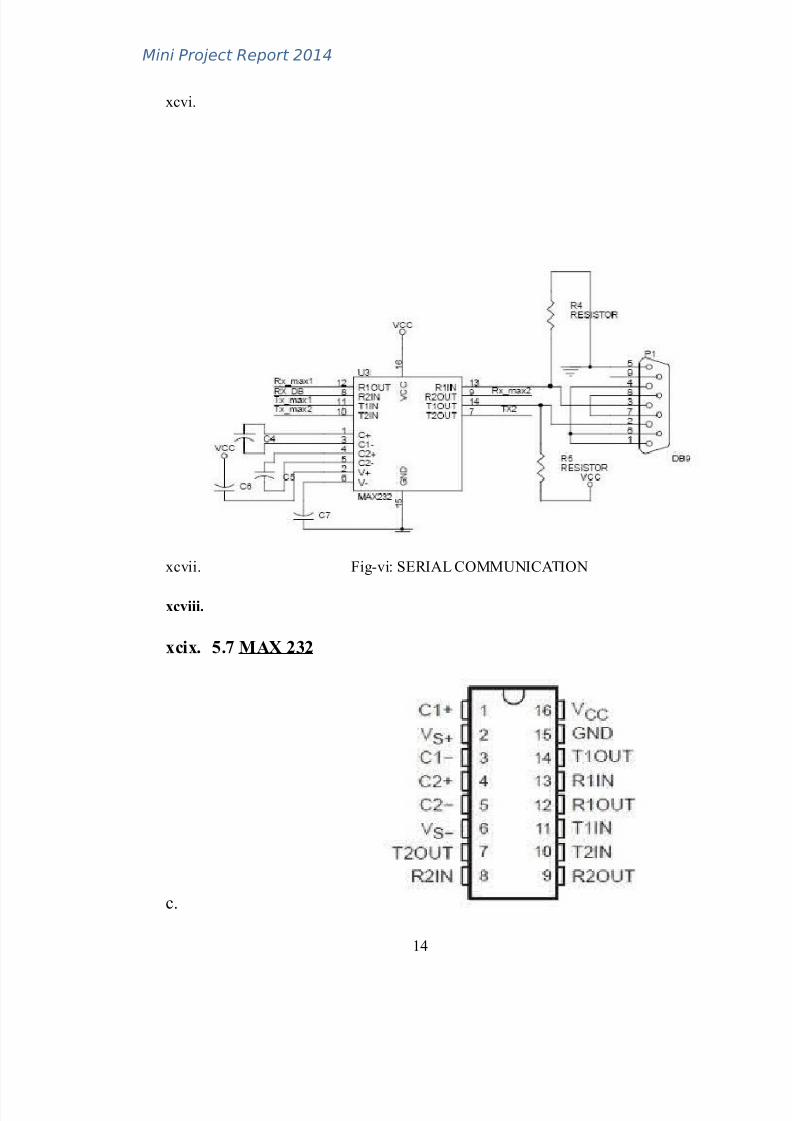
xcvii. ig$vi9 0#(IA5 "'MME&I"A*I'&
2cviii.
2ci2. .7 MA- ()(
c.
%3
7/21/2019 COLLISION AVOIDANCE VEHICLE
http://slidepdf.com/reader/full/collision-avoidance-vehicle 20/33
Mini Project Report 2014
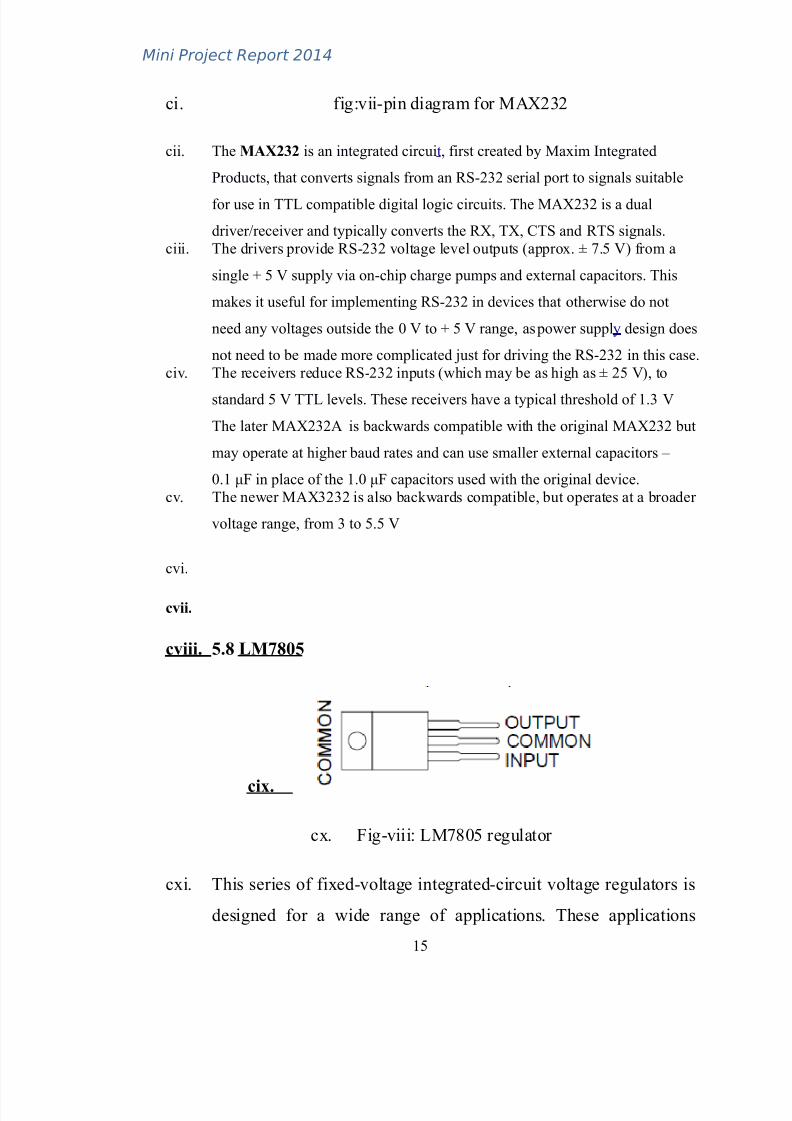
ci. fig9vii$pin diagram for MA8/2/
cii. *he MA-()( is an integrated circuit, first created by Maxim Integrated
)roducts, that converts signals from an (0$/2/ serial port to signals suitable
for use in **5 compatible digital logic circuits. *he MA8/2/ is a dual
driverCreceiver and typically converts the (8, *8, "*0 and (*0 signals.
ciii. *he drivers provide (0$/2/ voltage level outputs >approx. F .4 ? from a
single G 4 supply via on$chip charge pumps and external capacitors. *his
makes it useful for implementing (0$/2/ in devices that otherwise do not
need any voltages outside the 7 to G 4 range, as power supply design does
not need to be made more complicated just for driving the (0$/2/ in this case.
civ. *he receivers reduce (0$/2/ inputs >which may be as high as F /4 ?, to
standard 4 **5 levels. *hese receivers have a typical threshold of %.2
*he later MA8/2/A is backwards compatible with the original MA8/2/ but
may operate at higher baud rates and can use smaller external capacitors H
7.% in place of the %.7 capacitors used with the original device.
cv. *he newer MA82/2/ is also backwards compatible, but operates at a broader
voltage range, from 2 to 4.4
cvi.
cvii.
cviii. .6 LM769
ci2.
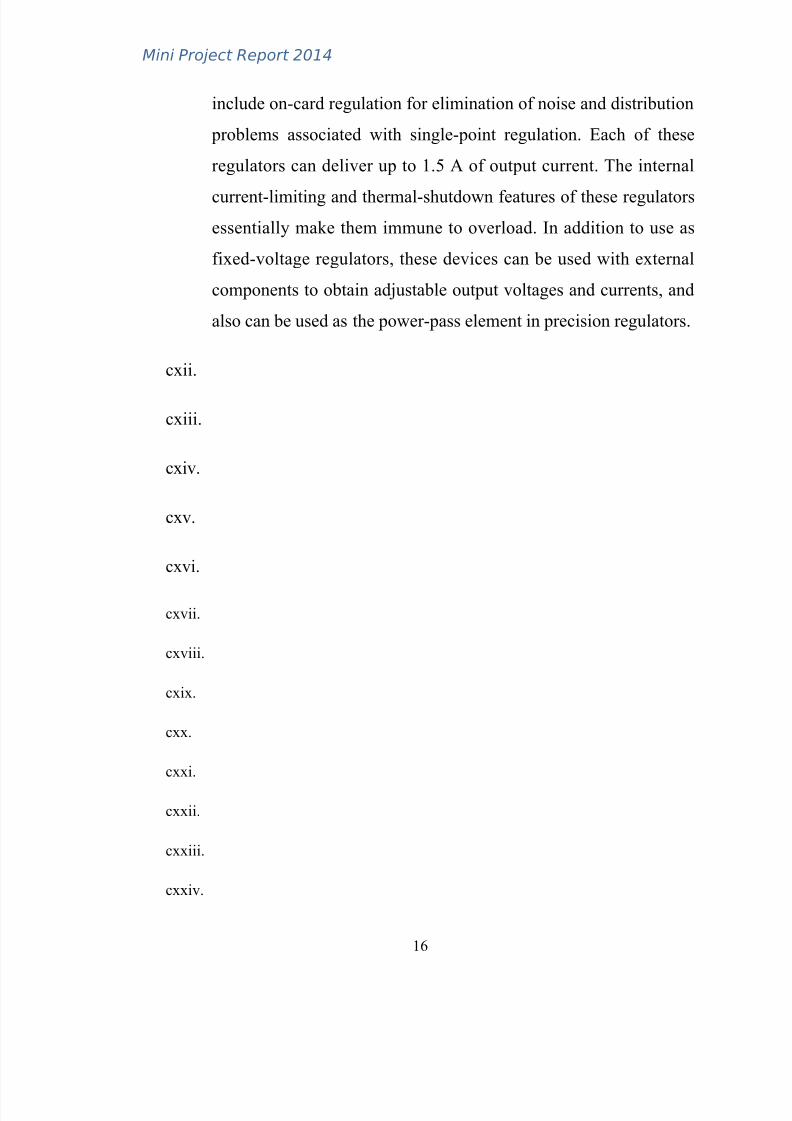
cx. ig$viii9 5M-74 regulator
cxi. *his series of fixed$voltage integrated$circuit voltage regulators is
designed for a wide range of applications. *hese applications
%4
7/21/2019 COLLISION AVOIDANCE VEHICLE
http://slidepdf.com/reader/full/collision-avoidance-vehicle 21/33
Mini Project Report 2014
include on$card regulation for elimination of noise and distribution
problems associated with single$point regulation. #ach of these
regulators can deliver up to %.4 A of output current. *he internal
current$limiting and thermal$shutdown features of these regulators
essentially make them immune to overload. In addition to use as
fixed$voltage regulators, these devices can be used with external
components to obtain adjustable output voltages and currents, and
also can be used as the power$pass element in precision regulators.
cxii.
cxiii.
cxiv.
cxv.
cxvi.
cxvii.
cxviii.
cxix.
cxx.
cxxi.
cxxii.
cxxiii.
cxxiv.
%+
7/21/2019 COLLISION AVOIDANCE VEHICLE
http://slidepdf.com/reader/full/collision-avoidance-vehicle 22/33
Mini Project Report 2014
cxxv.
cxxvi.
cxxvii.
c22viii. CONCL&S$ON
c22i2.
cxxx. After creating the mobile robot, implementing the
collision avoidance algorithm on the microcontroller, testing and with
modification we were able to achieve our project goal. *hat is to
design a collision avoidance robot. 'ur final version of the mobile
robot was able to avoid collision 67J of the time >according to test
results?. 0ince it is :uite difficult to develop a %77J collision
avoidance system, we believe that the achieved collision avoidance
rate is satisfactory.
cxxxi.
cxxxii.
cxxxiii.
cxxxiv.
cxxxv.
cxxxvi.
cxxxvii.
C---3$$$.
cxxxix.
%
7/21/2019 COLLISION AVOIDANCE VEHICLE
http://slidepdf.com/reader/full/collision-avoidance-vehicle 23/33
Mini Project Report 2014
cxl.
cxli.
cxlii.
C-L$$$. RE%ERENCES
c21iv.
cxlv. K%L. 0. ". =#lectromagnetic Waves=. "entre for (emote Imaging, 0ensing and
)rocessing. (etrieved /77+$%7$/.
cxlvi. K/L. William . eadon, Alan W. eadon. andbook of small electric motors.
Mc;raw$ill )rofessional, /77%. )age 3$%23.
cxlvii. K2L. #lectronic !esign Automation or Integrated "ircuits andbook, by
5avagno, Martin, and 0cheffer, I01& 7$-362$276+$2 A survey of the field of
electronic design automation, one of the main enablers of modern I" design.
cxlviii. K3L. 0abyasachi ;hoshray, B.B. en >%66+?. =A "omprehensive (obot
"ollision Avoidance 0cheme by *wo$!imensional ;eometric Modeling=.
cxlix.
cl.
cli.
clii.
cliii.
cliv.
clv.
clvi.
%-

7/21/2019 COLLISION AVOIDANCE VEHICLE
http://slidepdf.com/reader/full/collision-avoidance-vehicle 24/33
Mini Project Report 2014
clvii.
clviii.
CL$-.
CL-. A""END$-/' :"ROGRAM;
clxi.
clxii. NincludeOpic.hP
clxiii. Ndefine motor%Qe% >(#/?
clxiv. Ndefine motor%Qi% >(#%?
clxv. Ndefine motor%Qi/ >(#7?
clxvi. Ndefine motor/Qe/ >(A/?
clxvii. Ndefine motor/Qi% >(A4?
clxviii. Ndefine motor/Qi/ >(A2?
clxix. Ndefine motorirQen >(1?
clxx. Ndefine motorirQin% >(1+?
clxxi. Ndefine motorirQin/ >(14?
clxxii. void delayms>int x?R
clxxiii. void delay>int x?R
clxxiv. void forward>void?R
clxxv. void backward>void?R
clxxvi. void right>void?R
%6
7/21/2019 COLLISION AVOIDANCE VEHICLE
http://slidepdf.com/reader/full/collision-avoidance-vehicle 25/33
Mini Project Report 2014
clxxvii. void left>void?R
clxxviii. void stop>void?R
clxxix. void stopi>void?R
clxxx. void mtrrht>void?R
clxxxi. void mtrlft>void?R
clxxxii. char statusS7R
clxxxiii. void main>?
clxxxiv. T
clxxxv. A!"'&%S787R
clxxxvi. *(I0AS7x77R
clxxxvii. *(I0#S7x77R
clxxxviii. (1)ES7R
clxxxix. *(I01S7877R
cxc. *(I0!S7xR
cxci. )'(*!S7877R
cxcii. )'(*1S7877R
cxciii. stop>?R
cxciv. delayms>/7?R
cxcv. while>%?
cxcvi. T
cxcvii. if>(!7SS%?
/7
7/21/2019 COLLISION AVOIDANCE VEHICLE
http://slidepdf.com/reader/full/collision-avoidance-vehicle 26/33
Mini Project Report 2014
cxcviii. T
cxcix. stop>?R
cc. delayms>7?R
cci. mtrrht>?R
ccii. delayms>44?R
cciii. stop>?R
cciv. delayms>7?R
ccv. if>(!7SS%?
ccvi. T
ccvii. mtrlft>?R
ccviii. delayms>%24?R
ccix. stop>?R
ccx. delayms>7?R
ccxi. if>(!7SS%?
ccxii. T
ccxiii. mtrrht>?R
ccxiv. delayms>43?R
ccxv. stop>?R
ccxvi. delayms>7?R
ccxvii. backward>?R
ccxviii. delayms>%37?R
/%
7/21/2019 COLLISION AVOIDANCE VEHICLE
http://slidepdf.com/reader/full/collision-avoidance-vehicle 27/33
Mini Project Report 2014
ccxix. stop>?R
ccxx. delayms>7?R
ccxxi. while>%?R
ccxxii. U
ccxxiii. else
ccxxiv. T
ccxxv. mtrrht>?R
ccxxvi. delayms>42?R
ccxxvii. stop>?R
ccxxviii. delayms>7?R
ccxxix. backward>?R
ccxxx. delayms>37?R
ccxxxi. stop>?R
ccxxxii. delayms>47?R
ccxxxiii. left>?R
ccxxxiv. delayms>37?R
ccxxxv. stop>?R
ccxxxvi. delayms>7?R
ccxxxvii. U
ccxxxviii. U
ccxxxix. else
//
7/21/2019 COLLISION AVOIDANCE VEHICLE
http://slidepdf.com/reader/full/collision-avoidance-vehicle 28/33
Mini Project Report 2014
ccxl. T
ccxli. mtrlft>?R
ccxlii. delayms>42?R
ccxliii. stop>?R
ccxliv. delayms>7?R
ccxlv. backward>?R
ccxlvi. delayms>37?R
ccxlvii. stop>?R
ccxlviii. delayms>47?R
ccxlix. right>?R
ccl. delayms>37?R
ccli. stop>?R
cclii. delayms>7?R
ccliii. U
ccliv. U
cclv. if>(!7SS7?
cclvi. T
cclvii. forward>?R
cclviii. delayms>%7?R
cclix. U
cclx.
/2
7/21/2019 COLLISION AVOIDANCE VEHICLE
http://slidepdf.com/reader/full/collision-avoidance-vehicle 29/33
Mini Project Report 2014
cclxi.
cclxii. U
cclxiii. U
cclxiv.
cclxv. void backward>void?
cclxvi. T
cclxvii. motor%Qe%S%R
cclxviii. motor%Qi%S%R
cclxix. motor%Qi/S7R
cclxx. motor/Qe/S%R
cclxxi. motor/Qi%S7R
cclxxii. motor/Qi/S%R
cclxxiii. U
cclxxiv. void forward>void?
cclxxv.T
cclxxvi.
cclxxvii. motor%Qe%S%R
cclxxviii. motor%Qi%S7R
cclxxix. motor%Qi/S%R
cclxxx. motor/Qe/S%R
cclxxxi. motor/Qi%S%R
/3
7/21/2019 COLLISION AVOIDANCE VEHICLE
http://slidepdf.com/reader/full/collision-avoidance-vehicle 30/33
Mini Project Report 2014
cclxxxii. motor/Qi/S7R
cclxxxiii. U
cclxxxiv. void stop>void?
cclxxxv. T
cclxxxvi.
cclxxxvii. motor%Qe%S7R
cclxxxviii. motor%Qi%S7R
cclxxxix. motor%Qi/S7R
ccxc. motor/Qe/S7R
ccxci. motor/Qi%S7R
ccxcii. motor/Qi/S7R
ccxciii.
ccxciv. motorirQenS7R
ccxcv. motorirQin%S7R
ccxcvi. motorirQin/S7R
ccxcvii. U
ccxcviii. void stopi>void?
ccxcix.T
ccc.
ccci. motor%Qe%S7R
cccii. motor%Qi%S7R
/4
7/21/2019 COLLISION AVOIDANCE VEHICLE
http://slidepdf.com/reader/full/collision-avoidance-vehicle 31/33
Mini Project Report 2014
ccciii. motor%Qi/S7R
ccciv. motor/Qe/S7R
cccv. motor/Qi%S7R
cccvi. motor/Qi/S7R
cccvii. U
cccviii.void right>void?
cccix. T
cccx.
cccxi. motor%Qe%S%R
cccxii. motor%Qi%S%R
cccxiii. motor%Qi/S7R
cccxiv. motor/Qe/S%R
cccxv. motor/Qi%S%R
cccxvi. motor/Qi/S7R
cccxvii. U
cccxviii. void left>void?
cccxix.T
cccxx.
cccxxi. motor%Qe%S%R
cccxxii. motor%Qi%S7R
cccxxiii. motor%Qi/S%R
/+
7/21/2019 COLLISION AVOIDANCE VEHICLE
http://slidepdf.com/reader/full/collision-avoidance-vehicle 32/33
Mini Project Report 2014
cccxxiv. motor/Qe/S%R
cccxxv. motor/Qi%S7R
cccxxvi. motor/Qi/S%R
cccxxvii. U
cccxxviii. void delayms>int x?
cccxxix. T
cccxxx. int i,jR
cccxxxi. for>iS7RiOxRiGG?
cccxxxii. for>jS7RjO%777RjGG?R
cccxxxiii.
cccxxxiv. U
cccxxxv. void delay>int x?
cccxxxvi. T
cccxxxvii. int i,jR
cccxxxviii. for>iS7RiOxRiGG?
cccxxxix. for>jS7RjO%777RjGG?R
cccxl.
cccxli. U
cccxlii.void mtrrht>void?
cccxliii. T
cccxliv. motorirQenS%R
/
7/21/2019 COLLISION AVOIDANCE VEHICLE
http://slidepdf.com/reader/full/collision-avoidance-vehicle 33/33
Mini Project Report 2014
cccxlv. motorirQin%S7R
cccxlvi. motorirQin/S%R
cccxlvii. U
cccxlviii. void mtrlft>void?
cccxlix. T
cccl. motorirQenS%R
cccli. motorirQin%S%R
ccclii. motorirQin/S7R
cccliii. U
cccliv.
ccclv.
ccclvi.