Classnotes for APM 581 Geometry and Control of Dynamical ...kawski/classes/apm581/15... ·...
161
Classnotes for APM 581 Geometry and Control of Dynamical Systems I Matthias Kawski Arizona State University http:\math.asu.edu ~ kawski Spring 2015. October 13, 2015 These course-notes are work in progress and build on earlier versions of class-notes in differential geometry and nonlinear control theory. Many parts dealing with differential geometry are very close to (but nowhere as accurate) as Spivak’s textbooks – and they were justified only by Spivak being out of print when the 2000 spring semester began. Since then these volumes have been republished, and users of these notes are strongly encouraged to eventually buy the originals books by Spivak [20, 21]. This current set provides a shorter survey and contains fewer details of differential geometry as ASU now offers stand-alone courses in topology and differential geome- try. Their place is taken by more control topics which again are lifted from previous courses and the classical control items closely follow the presentations in the text- books by Isidori [12], Sontag [19], Nijmeier and van der Schaft [15], and Jurdjeviv [13]. More modern topics are loosely oriented along the more recent monographs by Bloch et. al. [2], Bullo and Lewis [6] (mechanical applications and affine con- nections), Agrachov and Sachkov [1] (advanced geometric points of view), Sch¨ attler and Ledzewicz [17] (geometric optimal control), and some recent journal articles.
Transcript of Classnotes for APM 581 Geometry and Control of Dynamical ...kawski/classes/apm581/15... ·...
-
Classnotes for APM 581
Geometry and Control of Dynamical Systems I
Matthias Kawski
Arizona State University
http:\math.asu.edu~kawski
Spring 2015.
October 13, 2015
These course-notes are work in progress and build on earlier versions of class-notesin differential geometry and nonlinear control theory.Many parts dealing with differential geometry are very close to (but nowhere asaccurate) as Spivak’s textbooks – and they were justified only by Spivak being outof print when the 2000 spring semester began. Since then these volumes have beenrepublished, and users of these notes are strongly encouraged to eventually buy theoriginals books by Spivak [20, 21].
This current set provides a shorter survey and contains fewer details of differentialgeometry as ASU now offers stand-alone courses in topology and differential geome-try. Their place is taken by more control topics which again are lifted from previouscourses and the classical control items closely follow the presentations in the text-books by Isidori [12], Sontag [19], Nijmeier and van der Schaft [15], and Jurdjeviv[13]. More modern topics are loosely oriented along the more recent monographsby Bloch et. al. [2], Bullo and Lewis [6] (mechanical applications and affine con-nections), Agrachov and Sachkov [1] (advanced geometric points of view), Schättlerand Ledzewicz [17] (geometric optimal control), and some recent journal articles.
http:\math.asu.edu~kawski
-
Classnotes: Geometry & Control of Dynamical Systems, M. Kawski. October 13, 2015 1
1 Introduction
1.1 Controlled dynamical systems: Examples and questions
• Dynamical systems: Origins, characteristic properties, many types
– Modeling: compare e.g. dynamical systems, contrast conservation laws. Examples.
– Characteristic semigroup property (of the flow) Φt ◦ Φs = Φs+t.– Continuous or discrete time (contrast: discrete event system). Examples.
– State space: discrete, vector space, Banach space, manifold, Lie group, . . . , hybrid.dynamics governed by ordinary or partial differential equations (ODE/PDE).
– Contrast deterministic and stochastic systems.
– . . .
• Dynamical systems: fundamental questions
– Existence and uniqueness of solutions (well-posedness)e.g. finite-escape time (y′ = 1 + y2), lack of unique solutions to initial value problems(IVP) (e.g., y′ = y2/3), common hypothesis in ODEs local Lipschitz continuity,case-by-case analysis in (nonlinear) PDEs
– Where do solutions go? long term behavior, limit sets, including equilibria and peri-odic orbits and strange attractors.
– Stability of solutions, especially of equilibria and periodic orbits.
– Continuous dependence on parameters, bifurcations, structural stability (of systems).
– System equivalence (orbits versus curves w/ time) and normal forms.
– . . .
• Controlled dynamical systems
– Fundamental difference: instead of asking “what will happen”, try to “make (anobjective) happen” (if possible).
– Vary (“ control” a (constant) parameter (classical dynamical systems), open-loop(time varying) controls, feedback controls.
– As many types as before, and more kinds of hybrid (e.g. continuous time dynamicalsystem with sample and hold output feedback.
– Reachability/controllability take place of existence and uniqueness.
– stabilizability in place of stability.
– input-output point of view, system identification,state-space realization / realizability.
– Structural stability now includes controls: robustness.
– System equivalence and normal forms, now with controls and with outputs, manymore kinds of equivalence.
– . . .
• Some toy mechanical examples, set-up
-
Classnotes: Geometry & Control of Dynamical Systems, M. Kawski. October 13, 2015 2
– Parallel parking a car (bicycle), possibly with a trailer or trailers.
– Parallel parking a rolling ball, possibly with a trailer.
– Inverted (double) pendulum, also in horizontal-vertical configuration.
– Falling cat, planar robot, snake board.
– What are the state, input (and output) spaces? [Manifolds and function spaces.]dimension count, fully actuated”? (angular) velocity or acceleration (torque, force)as control, adding an integrator and systems with drift.
1.2 A simple mechanical example
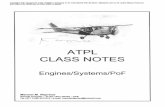
As a tangible example consider the problem of parallel parking a car. This is a typical exampleof a (completely nonintegrable) nonholonomic mechanical system, which is characterized byconstraints on the velocities – e.g., direct sideways motion is not allowed, yet from everydayexperience it is clear that the car may be moved into any position and orientation. To obtaina simple algebraic model, consider a bicycle instead of a car (avoiding any concerns aboutdifferentials that allow the outside wheels of a car to rotate faster than the inside wheels whenmoving along a curved path).
������
�
�
�
-
6
x
y ����L
θ
φ
Denote by (x, y), θ, and φ the position of the center of the rear wheel, the angle it makes withrespect to a fixed coordinate frame, and the angle the front wheel makes with the bicycle (i.e.,with the rear wheel). An elementary constraint is the length of the bicycle, e.g., call L thedistance between the axles of front and back wheel. Then the horizontal positions of front andback wheel are (x, y) and (x + L cos θ, y + L sin θ), respectively. The nonholonomic constraintsof interest, expressing that neither wheel is allowed to move sideways, may be written in termsof the differential forms
0 = sin θ · dx+ cos θ · dy, and0 = sin(θ + φ) · d(x+ L cos θ) + cos(θ + φ) · d(y + L sin θ).
Introducing the signed forward (horizontal) speed of the rear wheel as an additional state vand time t allows one to rewrite the first constraint as dx = v cos θ · dt and dy = v sin θ · dt.Substituting these into the second constraint (and using linearity of d) yields
0 = v (sin(θ + φ) cos θ − cos(θ + φ) sin θ) dt+ L (sin(θ + φ)(− sin θ − cos(θ + φ) cos θ) dθ= v sin((θ + φ)− θ) dt− L cos((θ + φ)− θ)dθ= v sinφdt− L cosφdθ.
and hence dθ = vL tanφdt. Introducing the controls u1 = v̇ (forward acceleration) and u2 = φ̇(angular velocity of the steering wheel / handle bar) these relations may be written as a system
-
Classnotes: Geometry & Control of Dynamical Systems, M. Kawski. October 13, 2015 3
of first order differential equations
ẋ = v cos θẏ = v sin θ
θ̇ = v tanφv̇ = u1φ̇ = u2
Writing q = (x, y, theta, v, φ) for the state introduce the column vector fields
f0(q) =
v cos θv sin θv tanφ
00
, f1(q) =
00010
, and f2(q) =
00001
(1)this system is recognized as a system that is affine in the control u
q̇ = f0(q) + u1f1(q) + u2f2(q). (2)
Several comments are in order. The choice of the controls, u1 as a force or acceleration, andu2 as an (angular) velocity appears inconsistent and arbitrary, and is meant to illustrate theconsequent differences in the resulting system.
Exercise 1.1 Formulate analogous models where both controls are (angular) accelerations, orboth are (angular) velocities. What are the corresponding dimensions of the state-spaces, andthe structures of the vector fields fi. In particular, identify what underlies the appearance of theuncontrolled drift vector field f0)?
The above informal derivations treated the space as a vector q ∈ R5, although it appears morereasonable to consider the angles elements of the interval/circle S1 = [0, 2π] (with endpointsidentified). Here this is an innocent minor different point of view, but when considering e.g.rolling balls, rotating satellites, etc. the angles θ, φ in the circle S1 will be replaced by rotationmatrices in the group SO(3) of orthogonal 3 × 3 matrices with positive determinant. Theseare the first examples to motivate studying nonlinear systems that evolve on manifolds, notnecessarily equal to Euclidean space Rn.
������
����������t
CCOu ?
g
θ
ϕ
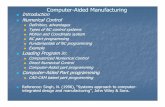
A popular system is an inverted (double) pendulum.Think of the Apollo program in the 1960s with the 105meter tall Saturn V rocket being kept vertical by sophis-ticated control of the directions of the thrust generatedby powerful nozzles at its bottom. Among the many vari-ations a case recently studied by Hauser [10] concerns thestabilization of a vertical inverted pendulum attached tothe end of a horizontal arm. The control is the angularacceleration about the shoulder. The equations of mo-tions are readily derived from first principles. Denotingthe ratio of the lengths of the arms by β and the control(angular acceleration) by u, one obtains:
θ̈ = u
ϕ̈ = sinϕ− β cos(ϕ− θ)θ̇2 + βu sin(ϕ− θ). (3)
-
Classnotes: Geometry & Control of Dynamical Systems, M. Kawski. October 13, 2015 4
Exercise 1.2 Rewrite the equations (3) as an affine system similar to (2), and identify theunderlying state space.
For many more , very attractive mechanical examples,rolling pennies, sliding skates, balls rollingon each other, see the introductory chapters on the textbooks by Bloch et. al. [2], Jurdjevic [13],Bressan and Piccoli [5], and by Bullo and Lewis [6], whose first chapter is freely available onlineat http://motion.me.ucsb.edu/book-gcms/pdf/chapter1.pdf.
1.3 The geometric point of view
• What does geometric (property) mean?
– Invariance under some (group) action.
– Examples: translation, scaling (units!), rotation, change of basis or coordinates.
– Examples: angle sum in triangle, later: integral of curvature (Gauss Bonnet).topological index (Poincaré-Hopf theorem: sinks, sources, saddles).
– “Coordinate free” (premium on invariant arguments/proofs, definitions).
• Compare linear (algebra and) control: subspaces instead of bases.
• Nonlinear dynamical systems: differential geometry in place of linear algebra.
– System equivalence (compare linear case: similarity).
– Distributions instead of controls and vector fields (generalizing subspaces).
– (Invariant) integral submanifolds (generalizing invariant subspaces).
• Mastering the tools: comparing nonlinear to linear systems
– (Abstract) differentiable manifolds (not only imbedded manifolds. – personal choice)(in place of vector spaces).
– Smooth vector fields (in place of matrices), differential forms (compare row vs col).
– Lie derivatives and Lie algebraic operations (in place of matrix algebra).
– Invariant and integral submanifolds (in place of subspaces).
– Exponential Lie series (in place of Laplace transform).
Exercise 1.3 Suppose A ∈ Rn×n, and B ∈ Rn×m. Show that for every continuous functionu : [0, T ] 7→ Rm, the solution of the linear system ẋ = Ax + Bu starting at x(0) = 0 staysinside the columnspace of the compound matrix [B,AB,A2B, . . . An−1B]. (Suggestion: Use thevariation of parameters formula, express the matrix exponential as an infinite series, and usethe Cayley-Hamilton theorem.)
http://motion.me.ucsb.edu/book-gcms/pdf/chapter1.pdf
-
Classnotes: Geometry & Control of Dynamical Systems, M. Kawski. October 13, 2015 5
2 Manifolds
2.1 Introduction
Manifolds may be thought of as abstractions and generalizations of the intuitive notions of curvesand surfaces. This subsection discusses key ideas, purposes and examples. The next subsectionsreview fundamental topological notions to prepare for a precise definition of manifolds, first inthe topological category, and then in the differential category.
The upcoming definition characterizes a manifold as a space in which every point has a neigh-borhood that is homeomorphic to an open subset of a Euclidean space Rn. In particular, thisdefinition does not allow for edges and boundaries thereby avoiding further technical complica-tions. The next step equips manifolds with differentiable structures that allow for notions suchas continuous-time dynamical systems evolving on the manifolds, and for generalized notions ofcurvature. Typical objectives are to analyze the effects of curvature on the global topologicalstructure or on the behavior of dynamical systems. A need to integrate over (subsets of) man-ifolds arises naturally. A major role of local coordinate charts is to transfer these differential(and integral) concepts back into familiar Euclidean space where standard techniques may beemployed for calculations.
Before proceeding to technical descriptions first take a brief look at some typical examples thatshould be included in any notion of manifold. Curves and surfaces, especially the Euclideanspaces Rn, and (open) subsets of Euclidean spaces should be manifolds. Curves and surfacesmay arise as images (or graphs) of functions defined on open subsets of Euclidean spaces (and,more generally, defined on manifolds). The illustration shows the surface defined by % = sin 2φ ·cos 3θ in spherical coordinates, i.e the image of the rectangle [0, 2π]× [0, π] which edges suitablyidentified under the map F : (θ, φ) 7→ sin 2φ cos 3θ · [cos θ sinφ, sin θ sinφ, cosφ].The characterization of the two dimensional sphere S2 ⊆ R3 as the set of all (x, y, z) ∈ R3 thatsatisfy x2 + y2 + z2 = 1, invites a natural generalization to higher dimensional analogues ofsurfaces as subsets of R that may be characterized by (sets of) equations Fk(x1, x2, . . . xn) = 0(k = 1, . . . p). In other words the manifold is given as a preimage F−1({0}). More generally, fora function a function F : M 7→ N between manifolds and a submanifold P ⊆ N , the preimageF−1({P}) ⊆M may be a submanifold of M .Generally one imposes technical conditions that guarantee that there are no self-intersections,edges or boundaries, or, in the category of differentiable manifolds, cusps or corners. A typical
-
Classnotes: Geometry & Control of Dynamical Systems, M. Kawski. October 13, 2015 6
such condition is that the gradient (or a higher dimensional analogue) of some function does notvanish.As a special case, this description immediately opens the door to objects such as the group ofspecial orthogonal matrices SO(3) in three or SO(n) in n dimensions. The defining equationA>A = In×n is of the same form as the equation of the sphere given above. What makes thesematrix manifolds particularly interesting is their natural group structure – there is a naturalnotion of multiplying points on the generalized surface which is compatible with the topologicalstructure. This is the starting point for Lie groups.A different way that many manifolds of interest arise is as quotients. In the most simple casethe circle S1 arises as a quotient of R by Z. Intuitively, for any periodic function f withperiod p > 0, i.e. f(x + p) = f(x) for all x ∈ R, one may consider as its natural domain anyinterval [a, a + p] with endpoints identified. More abstractly, consider the equivalence relation∼ defined on R by x ∼ y ⇐⇒ (x − y)/p ∈ Z. Then each point on the circle Θ represents anequivalence class [Θ] = {Θ + k p : k ∈ Z}. In an analogous way, the torus arises naturally (e.g.very commonly in dynamical systems) as the quotient of the plane R2 by Z2. One commonlyvisualizes the torus as the unit square [0, 1]× [0, 1] with opposing edges identified.
Picture: squares with identified edges, cylinder, torus, Klein bottle
If one starts with the same square, but identifies one (or two) sets of opposing edges withorientation reversed one arrives at the Klein bottle and at the projective plane. Neither one ofthese can be visualized in the usual way as a surface in R3, but apparently each shares manyproperties with the torus due to their analogous construction. Similar construction quickly getvery challenging: Gluing together different faces of a cube in R3 is still simple, but what aboutidentifying suitable pairs of faces of a dodecahedron? A good start for further reading withcompelling speculations about astrophysics is the article “The Poincaré Dodecahedral Space andthe Mystery of the Missing Fluctuations” by J. Weeks, AMS Notices 51 no. 6 (2004) pp. 610 -619, www.ams.org/notices/200406/fea-weeks.pdf.More abstractly, projective spaces arise as spaces of all lines in Rn that pass through the origin.Before looking at this more closely, recall the simple case of the space of all (semi-infinite, open)rays emanating from the origin. Each of these rays may be naturally identified with the point onthe unit sphere (unit circle) through which it passes. Thus one may think of the spheres Sn−1 asarising from Rn\{0} as quotients under the equivalence relation x ∼ y ⇐⇒ if there exists λ ∈ R,λ > 0 such that x = λy. In a practical sense this is closely related to considering only the angle(s)θ (or (θ, φ)) when working with polar (or spherical coordinates). This is a very simple case of agroup (here (R+, ·) acting on a manifold (here Rn \{0}), the equivalence classes being the orbitsof the group action. For general conditions when a generalization of such quotients (motivatedby realizations of control systems) again yields a manifold see e.g. “A generalization of the closed
www.ams.org/notices/200406/fea-weeks.pdf
-
Classnotes: Geometry & Control of Dynamical Systems, M. Kawski. October 13, 2015 7
subgroup theorem to quotients of arbitrary manifolds” by H. Sussmann, J. Differential Geometry10 (1975), pp. 151–166.In analogy, if one discards the requirement λ > 0 in the preceding definition of equivalence, thenthe equivalence classes are the lines through the origin. (More precisely, since the constructionstarted with Rn \ {0}, the origin is removed from each line, and each equivalence class reallyconsists of two rays.) One may visualize the resulting quotient space as the space of pairs ofopposite points on the sphere Sn−1, or as a semi-sphere with two halves of the equator (which isa sphere Sn−2 by itself) identified, or glued together with careful attention to the orientation ofeach piece.From these projective spaces it is only a small step to Grassmannian manifolds which maybe constructed as spaces of m-dimensional (hyper-)planes through the origin in n-dimensionalEuclidean space. A typical application where these appear naturally is in the classification oflinear control systems ẋ = Ax+ Bu, with state x ∈ Rn and control u ∈ Rm. Several notions ofequivalence that are of practical importance. One may consider two systems equivalent if onecan be transformed into the other by coordinates changes, in state x̃ = Rx and control spaceũ = Su, and/or under feedback transformations ũ = u + Kx. In most applications of practicalinterest m < n. Hence B is a tall matrix with more rows than columns. Assuming no additionalconstraints on the controls u ∈ Rm, the behavior of the system is determined by the columnspaceof B, which, if B is of full rank, is an m-plane in n-space, i.e., a point on a Grassmannian.
The above examples have structure beyond just being sets of points. In order to be able to workwith concepts such as continuity and notions of derivatives one intuitively needs some notion ofdistance. Indeed, while one can start with even more general topological spaces, in the finitedimensional setting very little is lost if one requires that the set is equipped with at least somea-priori notion of distance. However, this basic notion of distance will be used primarily toensure that the topology of the manifold is reasonably nice. It should not be confused with theRiemannian metrics that will be introduced later, and which are closely related to curvature.
2.2 Some basic notions from metric spaces and topology
This subsection reviews basic definitions and properties of objects in metric spaces and topology.
Reading instructions for APM 581, spring 2015This material could be in an appendix, and is not central to this spring’s course.Its main use is as a self-contained reference with precise definitions of technicalterms. Suggestion: Go through with high lighter and locate the technical termsbeing defined. Notions such as (equivalent) metrics, open and closed, continuous,compact are required, but others like regularity etc. are just provided as a refer-ence, just know where to find these.Suggested homework exercises:2.1 Equivalence of metrics.2.2 Bounded metric.2.11 Equivalent definition of continuity.2.12 and 13: Examples of homeomorphisms.2.18 Continuous image of a compact set.
Definition 2.1 A metric on a set X is a function d : X ×X 7→ R that satisfies
(i) For all x, y ∈ X, d(x, y) ≥ 0, and d(x, y) = 0 if and only if x = y (positive definiteness),
-
Classnotes: Geometry & Control of Dynamical Systems, M. Kawski. October 13, 2015 8
(ii) For all x, y ∈ X, d(x, y) = d(y, x) (symmetry), and
(iii) For all x, y, z ∈ X, d(x, z) ≤ d(x, y) + d(y, z) (triangle inequality).
A metric space is a pair (X, d) where X is a set and d is a metric of X.
A set X may be equipped with different metrics, which may or may not result in different notionsof continuity. For example, common metrics on Rn are
• the usual Euclidean distance defined by d2(x, y) = ‖y− x‖ =√
(y1 − x1)2 + . . . (yn − xn)2
• the taxi-cab metric defined by d1(x, y) =∑
i |yi − xi|, and
• the sup-norm d∞(x, y) = maxi |yi − xi|.
Definition 2.2 Suppose (X, d) is a metric space. A set U ⊆ X is called open if for every p ∈ Uthere is an ε > 0 such that the (open) ε-ball Bp(ε) = {x ∈ X : d(x, p) < ε} is contained in U ,i.e. Bp(ε) ⊆ U . A set F ⊆ X is called closed if X \ F is open.
Two metrics d and d′ on a space X are called equivalent if there exists constants c, C > 0 suchthat for all x, y ∈ X, cd′(x, y) ≤ d(x, y) ≤ Cd′(x, y).
Exercise 2.1 Show that the three metrics on Rn discussed above are equivalent.Show pictorially the meaning of above inequalities in terms of nested ε-balls with respect to thedifferent metrics. Conclude that the open sets in Rn are the same, independent of which of thesemetric employed to define open balls.
On any set X the discrete metric may be defined by d(x, y) = 1 is x 6= y and d(x, y) = 0 ifx = y. Given a metric d on a space X one may construct from it a bounded metric d̄ by settingd̄(x, y) = d(x, y) if d(x, y) ≤ 1 and d̄(x, y) = 1 else. Another useful bounded metric may beobtained by defining d̃ = d/(1 + d).
Exercise 2.2 Verify that the discrete and bounded metric described above are metrics.
Exercise 2.3 Let X be the set of all lines in the plane that pass through the origin. For lines`1 and `2 let d(`1, `2) to be the (smaller) angle between them. Verify that d is a metric on X.
Exercise 2.4 Show that if d is the discrete metric on a set X then every subset S ⊆ X is bothopen and closed.
Exercise 2.5 Consider a metric space (X, d) and the bounded metric d̄ (or d̃) constructed fromd as above. Show that a subset S ⊆ X is open in (X, d̄) if and only if it is open in (X, d).
The notions of open and closed do not require an underlying metric structure. The followingaxioms allow for a generalization to spaces without a metric:
Definition 2.3 A topology on a set X is a collection T ⊆ 2X of subsets of X that satisfies
(i) ∅ ∈ T and X ∈ T ,
(ii) T is closed under (arbitrary) unions, i.e., if {Uα : α ∈ A} ⊆ T then⋃α∈A Uα ∈ T , and
-
Classnotes: Geometry & Control of Dynamical Systems, M. Kawski. October 13, 2015 9
(iii) T is closed under finite intersections, i.e., if Uk ∈ T , k = 1, 2, . . . n, then⋂nk=1 Uk ∈ T .
A subset U ⊂ X is called open if U ∈ T . A subset F ⊂ X is called closed if X \ F ∈ T .A topological space is a pair (X, T ) where X is a set and T is a topology on X.
Note that an infinite intersection of open sets is not required to be open. The standard exampleis the real line with the usual topology and Uk = (− 1k ,
1k ). Clearly
⋂∞k=1 Uk = {0} which is not
open (in the standard topology). An open neighborhood of p ∈ X is an open set which containsp. Technically a topological space is a pair (X, T ). But when the choice of the topology T isclear from the context it is customary to refer to X as a topological space. In many settingsit is convenient to work with a smaller set that generates the topology, and it often suffices toverify conditions for such basis elements to conclude that the conditions are actually satisfiedby all open sets.
Definition 2.4 A basis for a topology T on a set X is a collection B ⊆ T of open sets such thatfor every open set U ∈ T there exists a collection {Bα : α ∈ Λ} ⊆ B such that U =
⋃α∈ΛBα.
Exercise 2.6 Show that on a set X a collection B ⊆ 2X is a basis for a topology on X if andonly if B covers X (i.e., for every x ∈ X there exists B ∈ B such that x ∈ B) and for everyB1, B2 ∈ B, and for all x ∈ B1 ∩B2 there exists B3 ∈ B such that x ∈ B3 ⊆ B1 ∩B2.
Familiar examples of basis for topologies are the sets of all open intervals on the real line, andthe set of all open balls in Rn. Similarly, a collection S ⊆ 2X that covers X is called a subbasisfor the topology that consists of all finite intersections of all arbitrary unions of subcollectionsof sets in S. A typical application of this concept involves putting a topology on the tangentbundle of a manifold, on other bundles.
Definition 2.5 For a subset A ⊂ X of a topological space, the interior of A is the union of allopen subsets contained in A and it is denoted by Å or intA. The closure of A is the intersectionof all closed subsets containing A and it is denoted by A.
Exercise 2.7 Show that if Y ⊆ X is a subset of a topological space (X, T ) then the collectionT ′ = {U ∩ Y : U ∈ T } defines a topology on Y . This topology is called the subspace topology.
Exercise 2.8 Suppose that (X, d) is a metric space. Show that the collection of open sets (inthe sense of open in a metric space) defines a topology on X. This topology is called the metrictopology on (X, d).
Definition 2.6 A topological space is called second countable if it has a countable basis. A sub-set Z of a topological space X is called dense if every nonempty open subset of X intersects Z,and X is called separable if it has a countable dense subset.
One typically assumes that manifolds under investigation are second countable – this may bea consequence of such assumptions that they metric (or metrizable) spaces that are σ-compact(i.e. countable unions of compact sets, see below. Similarly, a topological space is called firstcountable if for every point x there exists a countable basis at x, that is a collection Bx of opensets each containing x such that for every open set U containing x, there exists a B ∈ Bx suchthat x ∈ B ⊆ U .
-
Classnotes: Geometry & Control of Dynamical Systems, M. Kawski. October 13, 2015 10
Example 2.1 Every metric space is first countable.Every separable metric space is second countable.Every Euclidean space Rn is second countable.
Exercise 2.9 Prove the assertions made in example 2.1.
Definition 2.7 Suppose X and Y (or, more precisely (X, TX) and (Y, TY )) are topologicalspaces. A map f : X 7→ Y is called continuous if for every open set U ⊆ Y the preimagef−1(U) ⊆ X is open (i.e. U ∈ TY =⇒ f−1(U) ∈ TX). (This is equivalent to f−1(F ) ⊆ X closedfor every F ⊆ Y closed.)A map f : X 7→ Y is called open if for every open set U ⊆ X the image f(U) ⊆ Y is open.A map f : X 7→ Y is called closed if for every closed set F ⊆ X the image f(F ) ⊆ Y is closed.
In the case that TX and TY are the metric topologies associated with metrics dX and dY on Xand Y , respectively, this notion of continuity agrees with the standard ε-δ characterization ofcontinuity. A function f : X 7→ Y between metric spaces is continuous (as defined above) if andonly if for every p ∈ X and for every ε > 0 there is a δ > 0 such that if q ∈ X with dX(p, q) < δthen dY (f(p), f(q)) < δ. Practically the notion of continuity captures the concept that smallchanges in the input of a function cause only small changes in the output.
Exercise 2.10 Consider the set R of real numbers with the usual topology T2, with the indiscretetopology T1 = {∅,R}, and with the discrete topology T3 in which every subset of R is open.For each pair (i, j) with i, j = 1, 2, 3 describe the set of continuous functions from (R, Ti) to(R, Tj). (Make a 3 × 3 table.) In particular, for which pairs is the identity function id : x 7→ xcontinuous? For which pair(s) are (only) the constant functions continuous, and for whichpair(s) are all functions continuous?
Exercise 2.11 Verify the assertion that in metric spaces the standard ε-δ characterization ofcontinuity agrees with the definition given above.
Definition 2.8 A map f : X 7→ Y between topological spaces is called a homeomorphism if
(i) f is a bijection, i.e. one-to-one and onto,
(ii) f is continuous, and
(iii) f−1 is continuous (i.e. f is open).
Two spaces topological spaces X and Y are called homeomorphic if there exists a homeomorphismf that maps X onto Y .
Do not confuse the term homeomorphism discussed here with homomorphism which refers tomaps that preserve algebraic relationships as in f(p · q) = f(p) · f(q).From a topological point of view homeomorphic spaces are considered as identical.
Exercise 2.12 Verify that the map f : (0, 1) 7→ R defined by f : x 7→ 1−2xx(x−1) is a homeomor-phism. (Calculate f ′ and consider lim
x→0+f(x) and lim
x→1−f(x).)
Exercise 2.13 Verify that the map f : R2 7→ B20(1) = {x ∈ R2 : ‖x‖ < 1} defined by f : x 7→x
1+‖x‖ is a homeomorphism.
-
Classnotes: Geometry & Control of Dynamical Systems, M. Kawski. October 13, 2015 11
While it seems intuitively clear that Rn and Rm are not homeomorphic for n 6= m, the proof(for general m and n) is surprisingly hard – usually utilizing tools from algebraic topology.Note that there exists for example a continuous function f : [0, 1] 7→ [0, 1] × [0, 1] that is con-tinuous and onto. However, the inverse f−1 can’t be continuous. For more details on theconstruction of such space-filling curves see e.g. Munkres, Topology, p. 271.
Definition 2.9 A subset A ⊆ X of a topologically space X is called connected if wheneverB,C ⊆ X are disjoint open sets such that B ∪C = A then A ⊆ B or A ⊆ C (i.e. A ∩B = ∅ orA ∩ C = ∅). If A is not connected then it is called disconnected.
Exercise 2.14 Suppose that f : X 7→ Y is a continuous map. Show that if f is onto and X isconnected then Y is connected.
Exercise 2.15 On a topological space X define the relation ∼ ⊆ X ×X by x ∼ y if there existsa connected subset C ⊆ X such that x ∈ C and y ∈ C. Show that ∼ is an equivalence relation.(The equivalence classes of this relation are called the (connected) components of the space X.)
In general topological spaces one works with a number of different notions of connectedness.Here only consider the following other notion, which is stronger than connectedness:
Definition 2.10 A subset A ⊆ X of a topologically space X is called path-connected if wheneverp, q ∈ A then there exist a continuous map γ : [0, 1] 7→ A such that γ(0) = p and γ(1) = q.
Exercise 2.16 Show that every path-connected set is connected.
Exercise 2.17 Show that the topologist’s sine curve, i.e. the set {(x, sin(
1x
)) ∈ R2 : x 6= 0} ∪
{0} × [−1, 1] is connected but not path-connected.
One of the most common uses of connectedness is the argument that if a function f : X 7→ R iscontinuous and locally constant then it is constant provided the domain X is connected. Here,locally constant means that every p ∈ X has an open neighborhood U (containing p) such thatthe restriction of f to U is constant.To clarify this argument, consider the function f : R \ {0} 7→ R defined by f : x 7→ 0 if x < 0and f : x 7→ 1 if x > 0. Clearly the derivative f ′ ≡ 0 vanishes identically, but f is not constant.Of course, the key is that the domain is not connected. Consequently, the vanishing of thederivative only assures that f is locally constant. It does not assure that f is constant.
Arguably the most important topological concept for basic analysis is compactness. One maythink of it as an outgrowth of the desire to generalize, or to get to the real basics of the importanttheorem that every continuous function f : [a, b] 7→ R defined on a closed bounded interval attainsits minimum and its maximum, i.e. there exist points x1, x2 ∈ [a, b] such that for all x ∈ [a, b],f(x1) ≤ f(x) ≤ f(x2). It is well-known from first year calculus that this assertion fails if eitherof the closedness or boundedness hypotheses is omitted. The closedness requirement naturallygeneralizes to general topological spaces, but the boundedness does not. For example, if Rnis equipped with the bounded metric d̄ = d21+d2 (where d2 is the standard Euclidean metric),
then (Rn, d̄) still has the same topology as (Rn, d2) yet while K = Rn is closed and bounded in(Rn, d̄), it is not in (Rn, d2). Many different generalizations have been proposed to generalizethe basic idea of “closed and bounded” which is so useful in Rn(with its usual metric). Anyintroductory course in point-set topology will discuss such different notions of compactness. Itwas not until quite late into the 20th century that the following notion finally crystallized, andit became clear that it captures the fundamental features of the desired properties.
-
Classnotes: Geometry & Control of Dynamical Systems, M. Kawski. October 13, 2015 12
Definition 2.11 A subset K ⊆ X of a topological space X is called compact if every open coverof K has a finite subcover, i.e. if {Uα ⊆ X : α ∈ A} is a collection of open sets such that K ⊆⋃α∈A Uα then there exists a finite subcollection {Uαj : j = 1, 2, . . . n} such that K ⊆
⋃nj=1 Uαj
The Heine-Borel theorem asserts that every bounded closed interval in R is compact. Its proofmay be found in any advanced calculus text.
Exercise 2.18 Prove that if f : X 7→ Y is continuous and K ⊆ X is compact then the imagef(K) ⊆ Y is compact.In the case of Y = R this implies that there exist points p, q ∈ X at which f attains its globalminimum and global maximum, i.e. such that f(p) ≤ f(x) ≤ f(q) for all x ∈ X.
The corresponding property for preimages is frequently used to state that a map is radiallyunbounded as e.g. in the setting of Lyapunov stability of equilibria of dynamical systems.
Definition 2.12 A map f : X 7→ Y is called proper if for every compact set K ⊆ Y the preimagef−1(K) ⊆ X is compact.
Definition 2.13 A sequence {ak}k∈Z+ ⊆ X in a topological space X is said to converge if thereexists x ∈ X such that for every open set U ⊆ X containing x there exist a finite natural numberN such that an ∈ U for all n > N . Similarly, x is a limit point, or accumulation point of asubset A ⊆ X of for every set U ⊆ X containing x the set A ∩ U \ {x} is nonempty.
Exercise 2.19 Suppose A is an infinite subset of a compact space K. Show that A has alimit point in K. If, in addition, K is first countable then there exists a converging sequence{xk}k∈Z+.
The following separation axioms become useful when patching together local results, e.g. ob-tained in one coordinate chart at a time. This will be made precise when discussing partitionsof unity in a subsequent section.
Definition 2.14 • A topological space X is called a Hausdorff space if for every pair ofdistinct points p, q ∈ X there exist disjoint open sets U and V such that p ∈ U and q ∈ V .
• A Hausdorff space X is called regular if one-point sets are closed in X and if for everypoint p ∈ X and every closed set F ⊆ X not containing p, there exists disjoint open setsU and V such that p ∈ U and F2 ⊆ V .
• A Hausdorff space X is called completely regular if one-point sets are closed in X andif for every point p ∈ X and every closed set F ⊆ X not containing p there exists acontinuous function f : X 7→ R such that f(p) = 0 and f(x) = 1 for every x ∈ F .
• A Hausdorff space X is called normal if one-point sets are closed in X and if for everypair of disjoint closed sets F1, F2 ⊆ X there exists disjoint open sets U and V such thatF1 ⊆ U and F2 ⊆ V .
Finally the following notion of paracompactness is closely related to being normal and to metriz-ability, (indeed, metrizability is equivalent to paracompactness and local metrizability). Thusmany authors use paracompactness as a basic requirement when defining manifolds.
-
Classnotes: Geometry & Control of Dynamical Systems, M. Kawski. October 13, 2015 13
Definition 2.15 A subset S ⊆ X of a Hausdorff space X is called paracompact if every opencover of S has a locally finite open refinement. This means that if Uα, α ∈ A are open sets suchthat S ⊆
⋃α∈A Uα then there exist a collection of open sets Vβ, β ∈ B such that
• For every β ∈ B there exists an α ∈ A such that Vβ ⊆ Uα,
• S ⊆⋃β∈A Vβ, and
• every p ∈ S has an open neighborhood W which intersects only a finite number of the setsVβ, β ∈ B.
2.3 Local coordinate charts
This section defines the concept of a topological manifold which is to serve as a spring board forthe subsequent definition of a differentiable manifold. The main focus is on the concept of localcoordinate charts.
Reading instructions for APM 581, spring 2015Work coordinate examples in exercises in detail. Important to get used to thenotation and terminology.
Definition 2.16 A topological manifold M is a metric space (M,d) such that for every p ∈Mthere exist n ∈ Z+, an open set U ⊆M containing p and a homeomorphism u : U 7→ Rn.
A few remarks:
• The metric d plays little role in the future – what is needed is really only a reasonablynice topological space. Metric, or more accurately, metrizable spaces just happen to haveabout the right set of properties needed throughout the standard development.
• The statement that U is homeomorphic to Rn may be replaced by U is homeomorphic toan open subset of Rn.
• If M is connected, then n is constant and is called the dimension of the manifold M , andM is called an m-manifold.
• The functions ui = xi ◦ u : U 7→ R are called local coordinates. Use xi : Rn 7→ R, i =1, . . . n to denote the standard coordinate functions, defined for a = (a1, . . . an) ∈ Rn byxi : (a1, . . . an) 7→ ai. The pair (u, U) is called a local coordinate chart about p. Note thatif (u, U) is a local coordinate chart about p then (ũ, U) defined by ũ : q 7→ u(q)− u(p) forq ∈ U is a local coordinate chart about p such that ũ(p) = 0. This is usually written asũ : (U, p) 7→ (Rn, 0).
-
Classnotes: Geometry & Control of Dynamical Systems, M. Kawski. October 13, 2015 14
If (u, U) and v, V are coordinate charts about p ∈M (i.e. in particular p ∈ U ∩ V , then
v ◦ u−1 : u(U ∩ V ) 7→ v(U ∩ V ) (4)
is a homeomorphism between open subsets of Rn.
Continue with a short list of examples of manifolds and coordinate charts.
• For any n ≥ 0 the n-dimensional Euclidean space Rn is an n-dimensional manifold withthe single coordinate chart (id,Rn).
• The open ball Bp(r) = {x ∈ Rn : ‖x−p‖ < r} of radius r about p ∈ Rn is an n-dimensionalmanifold with a single chart given by U = Bp(r) and u(x) = (x− p)/(r − ‖x− p‖).
• Every open subset of an n-dimensional manifold is itself an n-dimensional manifold.
• Identify the space Mm,n(R) of m-by-n matrices with real entries with the space Rmn.E.g. in the 2× 2-case simply identify
u :
(a bc d
)7→
abcd
With this identification Mm,n(R) inherits a natural metric structure. Clearly this showsthat the entire space Mm,n(R) is an nm-dimensional manifold.Of more interest are various subspaces of Mm,n(R). Typical examples are the general lineargroup GL(n,R) = {A ∈ Mn,n(R) : detA 6= 0} and its subset of orientation preservingnonsingular matrices GL+(n,R) = {A ∈ Mn,n(R) : detA > 0}. Both are n2-dimensionalmanifolds. The argument uses that det is a polynomial function in the entries of the matrix,and hence it is continuous. Consequently, the preimages det−1(R \ {0}) and det−1(0,∞))of open sets are open subsets of Mn,n(R).
Further examples are the special linear groups SL(n,R) = {A ∈Mn,n(R) : detA = 1}, theorthogonal groups O(n) = {A ∈ Mn,n(R) : ATA = I}, and the special orthogonal groupsSO(n) = O(n)∩SL(n,R). Unlike the previous examples – which are open subsets – thesemanifolds are defined by closed conditions (i.e. “=” as opposed to “6=”, “”).
-
Classnotes: Geometry & Control of Dynamical Systems, M. Kawski. October 13, 2015 15
These examples will be revisited later when tools from differential calculus on manifoldswill make it easy to establish when such subsets defined by closed conditions give rise tomanifolds.
• The m-sphere Sm(r) = {x ∈ Rm+1 : ‖x‖ = r} is a m-manifold. The case m = 0 is specialwith S0(r) = {−r, r} ⊆ R consisting of only two points, and thus being disconnected. The1-sphere is a circle, and one needs at least two charts, e.g. U = S1(r) \ {(−r, 0)} andV = S1(r) \ {(r, 0)}. Use u(x, y) = atan2 (x, y) taking values in (−π, π) and v(x, y) =atan2 (x, y) taking values in (0, 2π). Note that the local coordinates agree essentially withthe angle of polar coordinates.
Exercise 2.20 Construct a collection of charts for the 2-sphere S2(r) by explicitly adapt-ing the spherical coordinates u(x, y, z) = (θ(x, y, z), φ(x, y, z)) ∈ (0, 2π)× (0, π) to differentsubsets resulting from different “cuts” What is the minimal number of cuts (minimal num-ber of charts) needed to cover S2?
A different set of coordinates, that is particularly useful for higher dimensional spheres isbased on stereographic projections: Consider the two subsets U± = S
m(r)\{(0, 0, . . . ,±r)}and define the maps u± : U± 7→ Rm by
u±(x) =2r
r ∓ xm+1(x1, . . . xm) (5)
Graphically (u±(x),∓r) ∈ Rm+1) is the point where the hyperplane xm+1 = ∓r intersectsthe line that passes through the point x ∈ Sm(r) and through (0, 0, . . . ,±r).
Exercise 2.21 For the inverse maps u−1± : Rm 7→ U± ⊆ Sm(r), derive the formulae
x = u−1± (y) =
(2r
1 +∥∥ y
2r
∥∥2 (y12r) , . . . 2r1 + ∥∥ y2r∥∥2(ym
2r
),∓ r ·
1−∥∥ y
2r
∥∥21 +
∥∥ y2r
∥∥2)
(6)
Use this to obtain explicit formulae for the “transition maps” u∓ ◦ u−1± : Rm 7→ Rm.What do these maps do graphically – e.g. which sets do they leave fixed?What are the images of (special) lines and circles?
• If Mm and Nn are m- and n−dimensional manifolds, respectively, then the Cartesianproduct M ×N is an (m+ n)-dimensional manifold: Suppose (p, q) ∈M ×N and (u, U)and (v, V ) are coordinate charts about p and q, then (u× v, U × V ) is a coordinate chartabout (p, q) where (u, v)(a, b) = (u(a), v(b)) ∈ Rm × Rn.A typical example uses that the circle S1 = {x ∈ R2 : ‖x‖ = 1} is a manifold to establishthat the torus T 2 = S1 × S1 is a 2-dimensional manifold.
• Next construct coordinate charts for real projective spaces. On Rm+1 \ {0} define theequivalence relation x ∼ y if x = λy for some λ ∈ R. The m-dimensional real projectivespace is defined as the quotient IPm =
(Rm+1 \ {0}
)/ ∼, i.e. a point [x] ∈ IPm is the
equivalence class [x] = {y ∈ Rm+1 \ {0} : y ∼ x}. Intuitively think of IPm as the space ofall lines in Rm+1 that pass through the origin, or as the m-sphere Sm with antipodal pointsx and −x identified. More graphically, one may obtain IP2 by sewing a disk to the (only
-
Classnotes: Geometry & Control of Dynamical Systems, M. Kawski. October 13, 2015 16
one!) edge of a Möbius strip. For j = 1, . . .m consider the sets Uj = {[x] ∈ IPm : xj 6= 0}and coordinates maps (homogeneous coordinates)
uj([x]) =
(x1xj, . . .
xj−1xj
,xj+1xj
, . . .xm+1xj
)(7)
Clearly the value of uj([x]) does not depend on the choice of the representative x ∈ [x].The inverse is given by u−1j (y1, . . . ym) = [y1, . . . , yi−1, 1, yi+1, . . . ym].
A complete discussion of these coordinate maps (they are supposed to be homeomorphisms)is straightforward but technical, in terms of the quotient topology. For an introductorydiscussion of quotient maps, and quotient topologies see e.g. Munkres (Topology, a firstcourse”, p.134). A main issue is to assure that the quotient topology is not pathological.Just as a reference, a surjective map f : X 7→ Y is called a quotient map if U ⊂ Y is openif and only if f−1(U) ⊆ X is open. For any map f : X 7→ A from a topological space X toa set A there is exactly one topology on A, called the quotient topology, such that f is aquotient map. In the case that A is a set of equivalence classes on X, A with this topologyis called a quotient space of X.
• Two-dimensional surfaces in R3 , or more generally m-dimensional hypersurfaces in Rm+1are familiar manifolds. The graph {(x, f(x)) : x ∈ Rm} ⊆ Rm+1 of a continuous functionf : Rm 7→ R is a manifold with the single chart u : (x, f(x)) 7→ x ∈ Rm.
More interesting are hypersurfaces that arise as preimages (“zero-sets”)M = F−1({0}) ={x ∈Rm+1 : F (x) = 0} of functions F : Rm+1 7→ R, or that are given by parameterizationsF : Rm 7→ Rm+1 and M = F (Rm).More generally, if M and N are a manifolds and Φ: M 7→ N then Φ(M) ⊆ N may bea manifold. Similarly, if P ⊆ N is a submanifold, then Φ−1(P ) ⊆ M might be a sub-manifold of M . To avoid unnecessary duplication and difficulties we shall discuss theseconstructions only in the setting of differentiable manifolds, in a subsequent section. Hereonly briefly consider two examples: Let f, g : R2 7→ R be defined by f : (x, y) 7→ x2 +y2−1and g : (x, y) 7→ xy. Then f−1(0) is the 1-sphere, while g−1(0) is not a manifold. Thestandard criterion that distinguishes these examples relies on derivatives: While (Df)never vanishes where f vanishes, (Dg) and g have common zeros – which are potentiallytroublesome points.
• There is a very rich world of complex manifolds – but we will not have the opportunity toexplore this in any depth in this course. Within the context of this section – coordinatecharts for topological manifolds – complex manifolds do not offer any new features. Butin the framework of differentiable manifolds, the much more rigid structure of complexdifferentiability opens completely new issues, far beyond this course.
2.4 Differentiation: Notation and review
This section fixes some notation for partial derivatives of maps between Euclidean spaces, andcontrasts this with a coordinate-free description of differentiation.
Reading instructions for APM 581, spring 2015The key item is to think of derivatives as linear maps. As a motivation, ponderwhat (kind of object, and its domain and range, the second and third derivatives ofa map from Rm to Rn are. Else just one simple exercise to check for understanding.
-
Classnotes: Geometry & Control of Dynamical Systems, M. Kawski. October 13, 2015 17
Let ei = (0, 0, . . . 0, 1, 0 . . . 0)T ∈ Rn denote the standard i-th basis vector. For a function
f : U 7→ R defined on an open subset U ⊆ Rn and a ∈ U the i-the partial derivative of f at a isdefined (and denoted) by
(Dif)(a) = limh→0
1h (f(a+ hei)− f(a)) (8)
provided the limit exists. To denote different degrees of regularity, use the following notation:
f ∈ C0(U) f is continuous on U (i.e., f is continuous at every p ∈ U)f ∈ Cr(U) all partial derivatives of up to order r of f exist and are continuous on U ,f ∈ C∞(U) all partial derivatives of all orders of f exist and are continuous on U ,f ∈ Cω(U) f is real analytic on U (f ∈ C∞(U) and f agrees (locally) with its Taylor series).
For a function f : A 7→ R defined on a set A ⊆ Rm one says f ∈ Cα(A) if there exist an openset U ⊆ Rm such that A ⊆ U and an extension f̄ of f to U (i.e. f̄ |A = f), and f̄ ∈ C
α(U).
If f : A ⊆ Rn 7→ Rm, then f ∈ Cα(A,Rm) if each coordinate function fk = xk ◦ f ∈ Cα(A).If f ∈ C1(Rn,Rm) then the Jacobian matrix is
(Df) = (Djfi) i = 1, . . .mj = 1, . . . n
=
D1f1 . . . Dnf
1
.... . .
...D1f
m . . . Dnfm
(9)For convenience identify the space Mm,n(R) of real m × n matrices with Rmn. Thus, if f ∈Cr(Rn,Rm), then (Df) ∈ Cr−1(Rn,Rmn), and (Dkf) ∈ Cr−k(Rn,Rmnk).The chain rule asserts that if U ⊆ Rm and V ⊆ Rn are open sets, g ∈ Cr(U,Rn) and f ∈Cr(V,Rp) with r ≥ 1, g(U) ⊆ V and a ∈ U , then f ◦ g is differentiable at a and D(f ◦ g)(a) =(Df)(g(a)) · (Dg)(a) (matrix-multiplication).
Theorem 2.1 (Implicit function theorem) Suppose U ⊆ Rm+n is open, (a, b) ∈ U and f ∈Cr(U,Rm) with r ≥ 1, and f(a, b) = 0. If the matrix of partial derivatives
(Dn+jf
i(a, b))i,j=1...m
is nonsingular then there exist open sets V ⊆ Rn and W ⊆ Rm with a ∈ V and b ∈ W and aunique function g : V 7→W such that f(x, g(x)) = 0 for all x ∈ V . Moreover, g ∈ Cr(V,W ).
Differentiability (as opposed to mere existence of partial derivatives) may be described in acoordinate-free way. Consider finite dimensional normed linear spaces V,W and let U ⊆ V beopen. Recall, a norm is a map ‖ · ‖ : V 7→ R such that ‖v‖ ≥ 0 for all v ∈ V , ‖v‖ = 0 if and onlyof v = 0, ‖λv‖ = |λ|‖v‖ for all v ∈ V and λ ∈ R, and ‖v + w‖ ≤ ‖v‖+ ‖w‖ for all v, w ∈ V . Asfinite dimensional linear spaces V and W are isomorphic to some Euclidean spaces Rn and Rm,but here the objective is to not fix any bases.
Definition 2.17 A map f : U 7→ W is differentiable at a ∈ U if there exists a linear mapL = La,f ∈ Hom(V,W ) such that f(a + h) = f(a) + L(h) + o(‖h‖). (This means that thereexists a map η : U 7→ W (depending on a and f) such that f(a + h) = f(a) + L(h) + ‖h‖η(h)and ‖η(h)‖ −→ 0 at ‖h‖ −→ 0.)
Exercise 2.22 Show that if f is differentiable at a then the linear map of the preceding definitionis uniquely determined. (Suppose there are two such linear maps. Show that their differencesatisfies L(h) −M(h) = o(‖h‖).) Therefore it is justified to talk about the derivative of f at a– and use the notation f ′(a).
-
Classnotes: Geometry & Control of Dynamical Systems, M. Kawski. October 13, 2015 18
A map f is called differentiable on an open set U if f is differentiable at all a ∈ U .
Note that if f : U ⊆ V 7→W then f ′ : U 7→ Hom(V,W ). But the space Hom(V,W ) of linear mapsfrom V to W is itself a linear space (finite dimensional, normed – with the induced norm ‖L‖ =max{‖Lv‖ : ‖v‖ = 1}). Hence one may naturally define higher order derivatives as linear mapsf ′′ : U 7→ Hom(V,Hom(V,W )) ∼= Hom(V ⊗ V,W ) and inductively f (k) : U 7→ Hom(
⊗ki=1 V,W ).
For comparison, if f : Rn 7→ Rm then (Df) is an (m×n) matrix, and, naively, (D2f) is some sortof (m × n × n) object which takes three inputs, a point where it is evaluated and two vectors,and its output is an m-vector. . .To summarize a few basic properties
(i) If f is differentiable then f is continuous.
(ii) If f and g are differentiable and λ ∈ R then (f + g)′ = f ′ + g′ and (λf)′ = λf ′.
(iii) If f is constant then f ′ ≡ 0. The converse is true if U is (path)connected.
(iv) If L ∈ Hom(V,W ), b ∈W and f = L+ b (i.e. f : v 7→ L(v) + b) then f ′ = L.
(v) (Chain-rule). Let V1, V2, V3 be normed linear spaces. Suppose U1 ⊆ V1 and U2 ⊆ V2 areopen, g : U1 7→ V2, f : U2 7→ V3, and g(U1) ⊆ U2. If f and g are differentiable, then so isf ◦ g and (f ◦ g)′ = (f ′ ◦ g) · g′.This notation is to be interpreted as follows: For p ∈ U1 and v ∈ V1, g′(p) ∈ Hom(V1, V2)and hence g′(p)(v) ∈ V2. Similarly, f ′(g(p)) ∈ Hom(V2, V3). Therefore f ′(g(p))(g′(p)(v)) ∈V3. This matches with (f ◦ g)′(p) ∈ Hom(V1, V3) and hence (f ◦ g)′(p)(v) ∈ V3.
2.5 Differentiable structures
Reading instructions for APM 581, spring 2015General reading of what differentiable structures are, but no need to worry aboutall technical details of the proof of proposition 2.2.Critically important the definition of a differentiable map between manifolds.Fun exercises 2.23 and 2.24, need not be worked in all detail, but try to get thebasic idea and work some cases.
Work coordinate examples in exercises in detail. Important to get used to thenotation and terminology.
In general, manifolds do not have a linear, not even an additive structure. Thus expressionsreminiscent of f ′(x) = lim
h→01h (f(x+ h)− f(x)) are meaningless for maps f : M 7→ N between
manifolds (unless one considers points in M as distributions on the algebra of smooth functions).A natural way to define a notion of differentiability on manifolds is to utilize coordinate charts(u, U) on M and (v, V ) on N to relate f : U 7→ V to the map v ◦ f ◦ u−1 between Euclideanspaces. The main concern is to ensure that any so-defined notion of differentiation on a manifolddoes not depend on the particular choice of coordinates. This leads naturally to the concept ofdifferentiable structures.
Definition 2.18 Two charts (u1, U1) and (u2, U2) on a manifold M are Cr-related (r = 1, 2, . . . ,
∞, ω) if the maps u2 ◦u−11 and u1 ◦u−12 are C
r-maps as maps between Euclidean spaces on theirrespective domains u1(U1 ∩ U2) and u2(U1 ∩ U2).
-
Classnotes: Geometry & Control of Dynamical Systems, M. Kawski. October 13, 2015 19
Definition 2.19 A Cr-differentiable structure on a manifold M is a maximal atlas D, thatis, a maximal collection of coordinate charts that covers M and which is such that any twocharts (u1, U1), (u2, U2) ∈ D are Cr-related. A manifold M together with a Cr-differentiablestructure D is called a Cr-manifold, or simply, a differentiable manifold (if r is understood,usually r =∞).
Definition 2.20 Two Cr-manifolds (M,D) and (N,D′) are called diffeomorphic if there existsa bijection Φ: M 7→ N such that (v, V ) ∈ D′ if and only if (v ◦ Φ,Φ−1(V )) ∈ D.The map Φ is called a diffeomorphism.
It is easy to see that every diffeomorphism must be continuous. Since the inverse Φ−1 is auto-matically a diffeomorphism, Φ is automatically a homeomorphism. However, manifolds may behomeomorphic without being diffeomorphic, see below.
Proposition 2.2 Every Cr-atlas is contained in a unique Cr-differentiable structure.
Proof. Let U = {(uα, Uα) : α ∈ A} be a Cr-atlas for a manifold M – i.e. any two charts(uα, Uα), (uβ, Uβ) ∈ U are Cr-related and M ⊆
⋃α∈A Uα. Define D to be the collection of all
coordinate charts (vα, Vα) on M which (each) are Cr-related to every (uα, Uα) ∈ U .
Maximality of D is clear. To verify that any two charts (vα, Vα), (vβ, Vβ) ∈ D are Cr-relatedit suffices to show that vβ ◦ v−1α : vα(Vα ∩ Vβ) 7→ Rm is locally Cr. Thus suppose that x ∈vα(Vα ∩ Vβ) ⊆ Rm and let p = v−1α (x) ∈ M . Since U is an atlas of M , it contains a chart(u, U) ∈ U about p. On the set vα(U ∩ Vα ∩ Vβ) one may write
vβ ◦ v−1α =(vβ ◦ u−1
)◦(u ◦ v−1α
)as a composition of Cr-maps – and hence vβ ◦ v−1α is locally Cr on vα(U ∩ Vα ∩ Vβ). Since thelatter set is open in Rm, vβ ◦ v−1α is Cr.Regarding uniqueness, suppose D′ is any Cr differentiable structure containing U . Then bydefinition every (v, V ) ∈ D′ is Cr-related to every (u, U) ∈ U , and consequently (v, V ) ∈ D, i.e.D′ ⊆ D. Since a differentiable structure is maximal by definition, also D ⊆ D′, i.e. D = D′.
Definition 2.21 Let (M,D) and (N,D′) be differentiable manifolds of class Cr and Cs, respec-tively, and k ≤ min{r, s}. A map Φ: M 7→ N is called differentiable of class Ck if for any charts(u, U) ∈ D and (v, V ) ∈ D′ the map v ◦ Φ ◦ u−1 is of class Ck on its domain.
• If M = Rm and N = Rn (with the usual differentiable structures) then Φ: M 7→ N isdifferentiable if it is differentiable in the usual sense.
• A map Φ: M 7→ Rn is differentiable if and only if each coordinate function Φk = xk ◦Φ isdifferentiable.
• Coordinate maps u are diffeomorphisms from U to u(U).
• A map Φ: M 7→ Rn is a diffeomorphism if and only if it is bijective, differentiable, and itsinverse is differentiable.
Proposition 2.3 Every differentiable map Φ: M 7→ N between manifolds is continuous.
-
Classnotes: Geometry & Control of Dynamical Systems, M. Kawski. October 13, 2015 20
Proof. W ⊆ N be open and suppose p ∈ Φ−1(W ) ⊆ M . Choose charts (u, U) about p ∈ Mand (v, V ) about Φ(p) ∈ N . Then (V ∩W ) ⊆ N is an open set containing Φ(p), and hencev(V ∩W ) ⊆ Rn is an open set containing (v ◦Φ)(p). Write p = (u−1 ◦ (v ◦Φ ◦u−1)−1)(v(Φ(p))).Then p is contained in the set u−1((v ◦ Φ ◦ u−1)−1(v(V ∩ W ))) which is an open subset ofU ∩ φ−1(W ) containing p since u−1 and v are homeomorphisms, and (v ◦ Φ ◦ u−1) as a differ-entiable map between Euclidean spaces is continuous. This shows that Φ−1(W ) ⊆ M is open,and hence Φ is continuous.
Exercise 2.23 Show that the identity map idM : M 7→M on a Cr-manifold M is a Cr-map.Suppose that M, N, and P are Cr-manifolds with A ⊆M and B ⊆ N . Show that if g ∈ Cr(A,N)and f ∈ Cr(B,P ) then f ◦ g ∈ Cr(A ∩ g−1(B), P ).
Exercise 2.24 Consider M = R with charts (uk, U), k = 1, 2, 3 where U = R and u1(x) = x3,u2(x) = x, and u3(x) = x
1/3. In each case provide an example of another chart (vk, Vk) that iscontained in the unique C1-differentiable structure Dk on M that contains (uk, Uk).Explain why Dk are (pairwise) different, give examples of charts contained in their intersections(or explain why the intersections are empty). Demonstrate that (M,Dk) are diffeomorphic.
Exercise 2.25 (Continuation of exercise 2.24). Consider the maps Φi,j,k : (M,Di) 7→ (M,Dj)defined by Φi,j,k(x) = x
k for k = 19 ,13 , 1 , 3 , 9. Which of these maps are differentiable? Which
maps are diffeomorphisms?
Note that every differentiable structure D of class Cr, r ≥ 1 may be regarded as an atlas of classCr−1, and hence is contained in a unique differentiable structure D′ of class Cr−1. Consequentlythe class of a manifold can be lowered at will, by adding new charts to an atlas. More importantis that every Cr-differentiable structure with r ≥ 1 contains a C∞ differentiable structure (seealso below). Consequently one routinely restricts one’s attention to C∞-manifolds.
Blanket hypothesis. Unless otherwise stated, all manifolds and maps consideredhenceforth are assumed to be C∞ manifolds and C∞-maps, respectively.
-
Classnotes: Geometry & Control of Dynamical Systems, M. Kawski. October 13, 2015 21
A few side-remarks:
A (very hard) theorem by Whitney asserts that every C1 differentiable structurecontains a Cω structure. On the other hand, Kervaire has given an example of a 10dimensional C0 manifold which admits no differentiable structure (hard!).The spheres Sn have unique differentiable structures for n ≤ 6, but Milnor showedin 1958 that S7 admits 28 non-diffeomorphic differentiable structures! He gave anexplicit construction of such exotic sphere that basically glues together two copies ofB3 × S3 along their boundaries S3 × S3 but identifying the point (a, b) of one copywith the point a, a2ba−1) of the other. (This uses a group structure closely relatedto quaternions and SO(3).) However, for any n there is only a finite number of“diffeo-classes” on Sn.For n 6= 4 the Euclidean space Rn has a unique differentiable structure, but R4 hasat least 3 non-diffeomorphic differentiable structures (1982).
This material makes for great reading, and there continue to be new exciting resultsdiscovered on a regular basis. It is easy to find exciting discussions of this materialon-line, incl. the connections to the Poincaré conjecture and Perelman’s proof of thelatter – which goes far beyond topology and uses geometry in essential ways.)
Some of this material is well suited for a survey paper (such as in a minor thesis,and for presentations in class or in graduate seminars.
2.6 Differentiating differentiable maps
Reading instructions for APM 581, spring 2015Critically important is the mastery of the notation and terminology.Submersions and immersions will be used frequently later, as will be adaptedcharts. The technical proof, involving the implicit function theorem is valuableas it makes clear how (hard it may be) to construct such coordinates in practicalexamples.
This section starts by defining (partial) derivatives of maps on coordinate charts. This notionwill enable us to define submersions, immersions, and imbeddings. These in turn are usefultools to construct new differentiable manifolds from known ones. As examples, hypersurfacesand some matrix submanifolds are revisited, and it is shown that every compact manifold canbe imbedded into a Euclidean space.
Recall the definition of the i-th partial derivative of a function f : Rn 7→ R at a point a ∈ Rn:Dif(a) = lim
h→01h (f(a1, . . . , ai−1, ai + h, ai−1, . . . , an)− f(a)).
The chronological notation aDif employed in geometric control will not be used in the sequel.
Definition 2.22 Suppose M is a differentiable manifold and f : M 7→ R. The i-th partialderivatives of f in a local coordinate chart (u, U) at a point p ∈ U is defined as
∂f
∂ui
∣∣∣∣p
= Di(f ◦ u−1)∣∣u(p)
(10)
-
Classnotes: Geometry & Control of Dynamical Systems, M. Kawski. October 13, 2015 22
Note, if γ : (−ε, ε) 7→ U ⊆ M is a curve such that γ(0) = p, ui(γ(t)) = t and uj(γ(t)) = uj(p)for j 6= i then for f : U 7→ R
∂f
∂ui
∣∣∣∣p
= Di(f ◦ u−1)∣∣u(γ(0))
= limh→0
1h (f(γ(h))− f(p)) (11)
This curve γ is adapted in a special way to the specific local coordinate chart. The next sectionwill generalize this setting along its way to construct the tangent bundle.
• If f = uj then ∂uj∂ui
= δi,j (Kronecker delta, i.e., δi,j = 1 if i = j and δi,j = 0 else).
• If M = Rn with the identity chart then ∂f∂ui
= Dif .
Proposition 2.4 (Chain-rule) Let (u, U) and (v, V ) be local coordinate charts, p ∈ U ∩V andf : M 7→ R. Then
∂f
∂vj
∣∣∣∣p
=n∑i=1
∂f
∂ui
∣∣∣∣p
∂ui
∂vj
∣∣∣∣p
(12)
In this case, the relation uses only two indices and may be nicely be written in matrix from
(∂f
∂v1, . . . ,
∂f
∂vn
)=
(∂f
∂u1, . . . ,
∂f
∂un
)∂u1
∂v1. . . ∂u
1
∂vn...
. . ....
∂un
∂v1. . . ∂u
n
∂vn
. (13)However, many subsequent formulas will involve more indices and hence generally will not beamenable to simple matrix thinking. Instead, most helpful is a careful and consistent choiceof indices written as subscripts and superscripts. This goes as far as the “Einstein summationconvention” (not used in these notes), which omits the summation signs and instead tacitlyimplies that if an index occurs once as a lower and once as an upper index, then it is understoodthat this index is to be summed over. Yet even without using that summation convention, it ishelpful to carefully check balanced occurrences as upper and lower indices.Proof. Use the coordinate maps and the chain-rule in Euclidean spaces
∂f∂vj
∣∣∣p
= Dj(f ◦ v−1)∣∣v(p)
= Dj((f ◦ u−1) ◦ (u ◦ v−1)
)∣∣v(p)
=n∑i=1
Di((f ◦ u−1)
∣∣(u◦v−1)(v(p)) · Dj(u
i ◦ v−1))∣∣∣v(p)
=n∑i=1
∂f∂ui
∣∣∣p
∂ui
∂vj
∣∣∣p.
(14)
Proposition 2.5 (Product-rule) Suppose (u, U) is a chart, p ∈ U and f, g : M 7→ R. Then
∂(fg)
∂vj
∣∣∣∣p
=∂f
∂vj
∣∣∣∣p
· g(p) + f(p) · ∂g∂vj
∣∣∣∣p
(15)
Exercise 2.26 Prove the product rule for functions on a manifold as stated above.
-
Classnotes: Geometry & Control of Dynamical Systems, M. Kawski. October 13, 2015 23
Proposition 2.6 Let (u, U) and (v, V ) be local coordinate charts, about p ∈ U ∩ V . Then theJacobian matrix(
∂ui
∂vj
∣∣∣∣p
)i = 1, . . . nj = 1, . . . n
is invertible. (16)
Proof. The chain-rule gives δi,k =∂ui
∂uk
∣∣∣p
=n∑j=1
∂ui
∂vj
∣∣∣p· ∂vj∂uk
∣∣∣p. Hence the Jacobian matrices
A =
(∂ui
∂vj
∣∣∣∣p
)i = 1, . . . nj = 1, . . . n
and B =
(∂vj
∂uk
∣∣∣∣p
)j = 1, . . . nk = 1, . . . n
(17)
satisfy A ·B = I, and similarly B ·A = I, i.e A is invertible.
Proposition 2.7 Let Φ: Mm 7→ Nn be a differentiable map between manifolds. If (u, U) and(ū, Ū) are local coordinate charts about p ∈M , and (v, V ) and (v̄, V̄ ) are local coordinate chartsabout Φ(p) ∈ N , then the Jacobian matrices (at p ∈ U ∩ Ū)(
∂(vi ◦ Φ)∂uj
∣∣∣∣p
)i = 1, . . . nj = 1, . . . n
and
(∂(v̄i ◦ Φ)∂ūj
∣∣∣∣p
)i = 1, . . . nj = 1, . . . n
have the same rank (18)
Proof. Applying the chain-rule twice yields
∂(v̄i◦Φ)∂ūj
∣∣∣p
= Dj(v̄i ◦ Φ ◦ ū−1
)∣∣ū(p)
= Dj((v̄i ◦ v−1
)◦(v ◦ Φ ◦ u−1
)◦(u ◦ ū−1
))∣∣ū(p)
=n∑k=1
m∑̀=1
Dk(v̄i ◦ v−1
)∣∣(v◦Φ)(p) · D`
(vk ◦ Φ ◦ u−1
)∣∣u(p)· Dj
(u` ◦ ū−1
)∣∣ū(p)
=n∑k=1
m∑̀=1
∂v̄i
∂vk
∣∣∣Φ(p)
∂(vk◦Φ)∂u`
∣∣∣p
∂u`
∂ūj
∣∣∣p
(19)
The proposition follows from the invertibility of the Jacobian matrices(∂v̄i
∂vk
∣∣∣∣Φ(p)
)i = 1, . . . nk = 1, . . . n
and
(∂u`
∂ūj
∣∣∣∣p
)` = 1, . . .mj = 1, . . .m
. (20)
Definition 2.23 Let Φ: Mm 7→ Nn be a differentiable map between manifolds. The rank of Φat p ∈M is defined as the rank of the Jacobian matrix(
∂(vi ◦ Φ)∂uj
∣∣∣∣p
)i = 1, . . . nj = 1, . . .m
(21)
where (u, U) and (v, V ) are any local coordinate charts about p ∈M and Φ(p) ∈ N , respectively.
This definition is justified – the rank is well-defined – by virtue of the preceding proposition:The rank of Φ at p (written rankpΦ) is independent of the choice of local coordinates employed.
-
Classnotes: Geometry & Control of Dynamical Systems, M. Kawski. October 13, 2015 24
Definition 2.24 Suppose Φ: M 7→ N is a differentiable map between manifolds.
• p ∈M is called a regular point of Φ if rankpΦ = dimN .
• p ∈M is called a critical point of Φ if rankpΦ < dimN .
• q ∈ N is called a regular value of Φ if every point p ∈ Φ−1(q) ⊆M is a regular point of Φ.
• q ∈ N is called a critical value of Φ if q = Φ(p) for some critical point p of Φ.
Note that every point q ∈ N \ Φ(M) is (vacuously) a regular value of Φ.Intuitively one expects that the set of critical values is a small subset of N . To make this preciseit suffices to have a notion of sets of measure zero on the manifold. (A notion of measure zerodoes not require a notion of a measure on the manifold!) Recall that a subset A ⊆ Rn hasmeasure zero, if for every ε > 0 there exist a countable collection of open cubes
Ci(pi, ri) = {q ∈ Rn : ‖q− p‖∞ < ri} such that A ⊆∞⋃i=1
Ci(pi, ri) and
∞∑i=1
rni < ε. (22)
Definition 2.25 A subset S ⊆Mn of a manifold M has measure zero if there exist a sequenceof charts (ui, Ui), i ∈ Z+ such that S ⊆
⋃∞i=1 Ui and each ui(Ui ∩ S) ⊆ Rn has measure zero.
Exercise 2.27 Suppose Φ ∈ C1(M,N) is a differentiable map between manifolds and S ⊆ Mhas measure zero. Show that Φ(S) ⊆ N has measure zero.
Theorem 2.8 (Sard’s theorem, simple version) Suppose M and N are differentiable man-ifolds with dimM = dimN and M has at most countably many connected components. IfΦ ∈ C1(M,N) then the set of critical values of Φ has measure zero in N .
Note that with this definition of sets of measure zero this theorem is a direct consequence of theanalogous statement for maps between Euclidean spaces. A proof of Sard’s theorem for suchmaps from Rn to Rn may be found in e.g. Spivak, Calculus on manifolds (p.72).
Definition 2.26 Suppose a differentiable map Φ: Mm 7→ Nn has constant rank k at all p ∈M .
• If k = dim N then Φ is called a submersion.
• If k = dim M then Φ is called an immersion and Φ(M) ⊆ N an immersed submanifold.
• If Φ is an immersion and Φ is also a homeomorphism onto its image Φ(M) (in the subspacetopology inherited from N), then Φ is called an embedding (or imbedding), and Φ(M) ⊆ Nis called an embedded (imbedded) submanifold, or simply a submanifold.
These definitions apply in particular to the case when the manifold M is also a subset of N . Inthis case, the map Φ: M 7→ N is naturally taken as the inclusion map ı : M ↪→ N defined byı(p) = p. Hence, the manifold M is an immersed submanifold of N if ı is an immersion, and Mis a submanifold of N if ı is an imbedding. In the case that M is a submanifold and is also aclosed subset of N one also calls M a closed submanifold.
Note that an immersion is not required to be one-to-one. However, since it has maximal rank,the map is locally one-to-one. This means that every point p ∈M has a neighborhood on whichthe map is one-to-one (i.e. the map is a topological immersion).
Examples (immersions and imbeddings):
-
Classnotes: Geometry & Control of Dynamical Systems, M. Kawski. October 13, 2015 25
• The map Φ: R 7→ R, Φ(x) = x3 is C∞ and is a homeomorphism, but not an immersion.
• The map g : R 7→ R2, g(t) = (2 sin t, sin 2t) is an immersion but not one-to-one.
• Define h : R 7→ R by h(t) = 2 tan−1 t. Then (g ◦ h) : R 7→ R2 is a one-to-one immersion,but not an imbedding: For every neighborhood U of (g ◦ h)(0) = (0, 0) in N = R2 thereexists a a > 0 such that (−∞,−a) ∪ (a,∞) ⊆ (g ◦ h)−1(U).
• A skew line on the torus is the image of a curve γ : R 7→ R2/Z2 γ : t 7→ (t, qt) mod Z2 foran irrational number q ∈ R \Q. The irrationality assures that γ is one-to-one. But theimage of γ is a dense subset on the torus, and hence it is not an embedding.
Theorem 2.9 [Adapted chart] Suppose Φ ∈ C∞(Mm, Nn) is a smooth map between mani-folds and p ∈M . If Φ has constant rank k on a neighborhood of p then there exist local coordinatecharts (u, U) and (v, V ) about p and Φ(p), respectively, such that for all x ∈ u(U) ⊆ Rm
v((Φ ◦ u−1)(x1, . . . xm)
)= (x1, . . . xk, 0, . . . 0)
Proof. Start with any charts (ū, Ū) and (v̄, V̄ ) about p and Φ(p), respectively. Without loss ofgenerality assume that the first (k × k)-minor of the Jacobian has full rank, i.e.
det
(∂(v̄i ◦ Φ)∂ūj
∣∣∣∣p
)i = 1, . . . kj = 1, . . . k
6= 0 (23)
(else permute and relabel the components of ū and/or v̄). This rank conditions allows one toeffectively use (v̄i ◦ Φ), i = 1, . . . k as coordinate functions in place of ui, i = 1, . . . k. Morespecifically define a new map ¯̄u : Ū 7→ Rm by ¯̄uj = v̄j ◦ Φ if j ≤ k and ¯̄uj = ūj else. Toverify that this is indeed a legitimate local coordinate change calculate the Jacobian matrixof partial derivatives ∂ ¯̄u
i
∂ūj. This matrix has an upper block triangular structure. The first
(k × k) minor agrees by construction with the one in (23), while the bottom right block is the(m − k) × (m − k) identity matrix. Consequently, the Jacobian has full rank at p, and hencein some open neighborhood of p. By virtue of the inverse function theorem, there exists aneighborhood U ⊆ Ū of p such that the restriction u of ¯̄u to U is a diffeomorphism (onto itsimage), and hence (u, U) is a chart about p. Thus for suitable functions ψ̄k+1, . . . ψ̄n : u(U) 7→ R
v̄((Φ ◦ u−1)(x1, . . . xm)
)= (x1, . . . xk, ψ̄k+1(x), . . . ψ̄n(x)). (24)
The Jacobian matrix of partial derivatives Dj(v̄i ◦Φ ◦ u−1)(x), with i = 1, . . . n, and j = 1 . . .m
has a lower block triangular structure. The top left (k × k) block is the identity, while thebottom right (m− k)× (n− k)-block consist of the partial derivatives Djψ̄i(x), i = k + 1, . . . nand j = k+ 1, . . .m. Since the matrix is assumed to have constant rank k in a neighborhood ofu(p) ∈ Rm, one concludes that the bottom right (m− k)× (n− k)-block is identically equal tozero. This means that the functions ψ̄i for i = k+ 1, . . . n do not depend on xj , j = k+ 1, . . .m.
Consequently there are functions ψ, i = k+ 1, . . . n, defined on a suitable subset of Rk such that
ψ̄i(x1, . . . , xk, xk+1, . . . xm) = ¯̄ψi(x1, . . . , xk) for all x = (x1, . . . xm) ∈ u(U) (25)
-
Classnotes: Geometry & Control of Dynamical Systems, M. Kawski. October 13, 2015 26
Restrict the maps v̄ and ¯̄ψ to V = V̄ ∩ Φ(U), denoted ¯̄v = v̄|V and ψ =¯̄ψ|V . Finally define
v : V 7→ Rn by vi = ¯̄vi if i ≤ k and vi = ¯̄vi−ψi◦(¯̄v1, . . . , ¯̄vk) if i > k, i.e. for y ∈ v̄(V ∩Φ(U)) ⊆ Rn
(vi ◦ v̄−1)(y1, . . . yn) = (y1, . . . yk, yk+1 − ψk+1(y1, . . . yk), . . . yn − ψn(y1, . . . yk)) (26)
This assures that, as desired, for x ∈ u(U ∩ Φ−1(V ))
(v ◦ Φ ◦ u−1)(x1, . . . xm) = (v ◦ v̄−1) ◦ (v̄ ◦ Φ ◦ u−1)(x1, . . . xm)
= (v ◦ v̄−1)(x1, . . . xk, ψk+1(x1, . . . xk), . . . ψn(x1, . . . xk))
= (x1, . . . xk, ψk+1(x1, . . . xk)− ψk+1(x1, . . . xk), . . .. . . ψn(x1, . . . xk)− ψn(x1, . . . xk))
= (x1, . . . xk, 0, . . . , 0).
(27)
Note that in general the construction in the proof works under the assumption that Φ ∈ Cr aslong as r > 0. The strong version of the inverse function theorem yields local coordinates u andv of the same degree of smoothness as Φ.The special case of k = dimM is sometimes referred to as the “local immersion theorem”, whilethe special case of k = dimN is referred to as the “local submersion theorem”. In the first casethe proof is a little shorter as it is immediately clear that (v ◦Φ) defines local coordinates aboutp. In the second case, the construction becomes shorter as there is no need for the functions ¯̄ψ.
Corollary 2.10 Suppose Φ ∈ C∞(Mm, Nn) is a smooth map between manifolds and q ∈ N . IfΦ has constant rank k on a neighborhood of Φ−1(q) then Φ−1(q) ⊆ M is a closed submanifoldof dimension (m − k) (or it is empty). In particular, if q ∈ N is a regular value of Φ thenΦ−1(q) ⊆M is an (m− n)-dimensional submanifold on M .
Proof. Suppose p ∈ Φ−1(q). Then there exist charts charts (u, U) and (v, V ) about p and q,respectively, such that w.l.o.g. u(p) = 0 ∈ Rm, v(q) = 0 ∈ Rn, and for x ∈ u(U ∩ Φ−1(V ))
(v ◦ Φ ◦ u−1)(x1, . . . xk, xk+1, . . . xm) = (x1, . . . xk) (28)
Let W = U ∩ Φ−1(q) and define w : W 7→ Rm−k by wj = uk+j for j = 1, . . . (m − k). Then(w,W ) is a chart for Φ−1({q}) about p.
This theorem is a special case of a more general result that applies to the inverse image Φ−1(P ) ⊆M of a submanifold P ⊆ N under a smooth map Φ: M 7→ N . To illustrate that some additionalhypotheses are needed, consider the example of M = R, N = R2, Φ(x) = (x, 0) and P ={(x, f(x) : x ∈ R} is the graph of the C∞-function f : R 7→ R, defined by f(x) = e−
1x if x > 0
and f(x) = 0 else. Then P ⊆ N is an (imbedded) 1-dimensional submanifold, Φ ∈ C∞(M,N)is an immersion (rankxΦ = 1 for all x ∈ M). However, Φ−1(P ) = (−∞, 0] ⊆ M is not asubmanifold (because no neighborhood of 0 ∈ Φ−1(P ) ⊆M is homeomorphic to R).
Exercise 2.28 Prove the submersion theorem: If Φ ∈ C∞(Mm, Nn) is a submersion and P ⊆N is a submanifold of dimension p then Φ−1(P ) ⊆M is a submanifold of dimension m−(n−p).
-
Classnotes: Geometry & Control of Dynamical Systems, M. Kawski. October 13, 2015 27
Exercise 2.29 Explore where an attempt (using constructions similar to the ones used in theproofs of the preceding theorem and corollary) to prove the statement of the preceding exercisewithout the assumption that rankΦ = n breaks down (unless other assumptions are added).
Examples (Submanifolds from submersions):
• If f : R2 7→ R, Φ(x, y) = x2 + y2, then f−1(1) = S1 ⊆ R2 is an (imbedded) circle.
• If f : Rm+1 7→ R, Φ(x) = ‖x‖22, then f−1(1) = Sm ⊆ Rm+1 is an (imbedded) m-sphere.
Exercise 2.30 (Hopf map) Let Φ̃ : R4 7→ R3 be defined by Φ̃(a) = (2a1a3 + 2a2a4, 2a2a3 −2a1a4, a
21 + a
22 − a23 − a24).
• Calculate the rank of Φ̃ at any a ∈ R4.
• Verify that Φ̃(S3) ⊆ S2.
• Let Φ be the restriction of Φ̃ to S3 ⊆ R4, and considered as a map into S2 ⊆ R3.
• Calculate the rank of Φ̃ at p ∈ S3 using the definition in terms of coordinate charts. (Usestereographic projections to avoid square-roots!)
• For q ∈ S2 describe the preimage Φ−1(q) ⊆ S3. Is it a submanifold? If so, what is itsdimension? Which manifold is it?
Exercise 2.31 Define Φ: Mn×n(R) 7→Mn×n(R) by Φ(A) = ATA. Show that the set Φ−1(In×n)of orthogonal matrices is a closed submanifold of Mn×n(R). What is its dimension?
Calculations for the example of the special linear group. If Φ = det : Mn×n(R) 7→ R is thedeterminant function, then the special linear group SL(n,R) is the preimage det−1(1). The fol-lowing calculations show that SL(n,R) is a closed (n2−1)-dimensional submanifold of Mn×n(R).It suffices to show that det has rank one at every A ∈ det−1(1) ⊆Mn×n(R). The following cal-culations actually provide a little more, including a formula for the derivative of det which isof interest in the next chapter. The calculation of the derivative in Mn×n(R) is basically thesame as in Rn2 . Since one needs inverses, consider the restriction f of det to the general lineargroup GL(n,R) = {A ∈ Mn×n(R) : detA 6= 0} of invertible matrices. To make the connectionwith the next chapter, recall that GL(n,R) is an open submanifold of Mn×n(R) – and thusit is appropriate to consider directional derivatives of at points A ∈ GL(n,R) in all possibledirections B ∈Mn×n(R):
f ′(A)(B) = limh→0
1h (f(A+ hB)− f(A))
= limh→0
1h (det(A+ hB)− detA)
= detA · limh→0
1h ·(hn · det( 1hI − (−A
−1B))− 1)
= detA · limh→0
1h ·(hn ·
(1
hn− 1hn−1
· tr(−A−1B) + . . .+ det(−A−1B))
︸ ︷︷ ︸characteristic polynomial of (−A−1B) at 1h
−1)
= detA · tr(A−1B)
Choosing B = A shows f ′(A)(A) = n detA 6= 0 and hence f ′(A) has full rank equal to one, thedimension of the range. Thus SL(n,R) is a an (n2 − 1)-dimensional closed submanifold.
-
Classnotes: Geometry & Control of Dynamical Systems, M. Kawski. October 13, 2015 28
2.7 Partitions of unity
Reading instructions for APM 581, spring 2015This is optional material for our class. Everyone should understand the underlyingidea of patching functions (e.g. feedback laws) together, but the details on thetechnical hypotheses are just provided as references.
It is very common that one can easily construct objects locally, e.g. working on coordinate charts.Partitions of unity are a versatile tool to patch together such objects into a globally defined one.From a different point of view, partitions of unity demonstrate that there are plenty of C∞
functions on a differentiable manifold (as opposed to comparatively few Cω-functions).We begin with some fundamental constructions in Euclidean spaces.
Lemma 2.11 Let m ≥ 1 , 0 ≤ a < b and p ∈ Rm. Then there exists a map k ∈ C∞(Rm,R)such that k(x) = 0 for ‖x− p‖ ≥ b, k(x) = 1 for ‖x− p‖ ≤ a, and 0 < k(x) ≤ 1 for ‖x− p‖ ≤ b.
Proof. Let f(t) = e−1t for t > 0 and f(t) = 0 else. Then f ≥ 0 and f ∈ C∞(R). Next define
g(t) =f(t)
f(t) + f(b− t)if t > 0 (29)
and g(t) = 0 for t ≤ 0. Then g(t) = 1 for all t ≥ b and g′(t) > 0 for 0 < t < b. Define
h(t) = g
(b(b+ t)
(b− a)
)· g(b(b− t)(b− a)
). (30)
and finally set k(x) = h(‖x− p‖).
One may replace the balls Bp(r) in the lemma by cubes Cmp (r) = {x ∈ Rm : |xi − pi| ≤ r} by
taking k(x) = h(x1 − p1) · . . . h(xm − pm).
Exercise 2.32 Sketch the graphs of f , g, and h, and prove that f ∈ C∞(R) as claimed in thepreceding proof. Verify that k is differentiable at 0 and is of class C∞.
Proposition 2.12 Let Mm be a C∞-manifold, V ⊆M open, and K ⊆ V compact. Then thereexists a function φ ∈ C∞(M, [0, 1]), φ|K ≡ 1 and φ|W ≡ 0 for some open set W ⊇M − V .
Proof. Use the compactness of K to select charts (ui, Ui), i = 1, . . . N1 such that K ⊆⋃N1i=1 Ui.
Since ui(Ui ∩ V ) ⊆ Rm is open (and w.l.o.g. nonempty), for every y ∈ ui(Ui ∩ V ) there existry,i > 0 such Cy(ry,i) ⊆ ui(Ui ∩ V ). The collection {u−1i (Cy(ry,i)) : i ≤ N1, u
−1i (y) ∈ K} is an
open cover of K.Choose a finite subcover {u−1i (Cyi,j (rj)) : i ≤ N1, j ≤ N2(i)}, (writing ri,j for ryi,j ,i). Bythe preceding proposition there exist functions hi,j : Rm 7→ [0, 1] such that hi,j(x) = 1 for allx ∈ Cyi,j (14rj) and hi,j(x) = 0 for all x 6∈ Cyi,j (
34rj). Define φi,j = hi,j ◦ ui on Ui and extend to
M by setting φi,j(q) = 0 for q 6∈ Ui. Combine these functions into
φ(x) = 1−∏i,j
(1− φi,j(x)) (31)
-
Classnotes: Geometry & Control of Dynamical Systems, M. Kawski. October 13, 2015 29
and set
W = M \⋃i,j
u−1i
(Cyi,j (
34rj)
)⊇M \ V (32)
Note that φ|K ≡ 1 since K ⊆⋃i,j u
−1i (Cyi,j (
14rj)). Clearly φ|W ≡ 0.
The objective is to use these bump-functions to patch together local results. It is a natural torequire that at any fixed point only a finite number of the local results are needed, or may beselected. This is a place where the assumptions that a manifold’s topology be reasonably nicecome into play. For example, every metric (metrizable) space is paracompact (Stone’s theorem),and hence normal. The following shrinking lemma is a direct consequence of these properties.The construction in its proof is a good exercise to practice working with paracompactness andnormality, and a good check for understanding. The lemma itself plays a fundamental role inthe desired partitions of unity which are used to patch together the local results.
Before proceeding with the shrinking lemma, consider the following, optional side-remarks.
Compactness may be characterized in the following way, which may seem unusual, butwhich lends itself a natural generalization: “A space K is compact if every open coverof X has a finite open refinement that covers X.” From here it is only a small step toparacompactness, which weakens “finite” to “locally finite” (and traditionally explicitlyrequires that the space is Hausdorff). According to Munkres (Topology, a first course):“The concept of paracompactness is one of the most useful generalizations of compactnessthat has been discovered in recent years. It is particularly useful for applications in al-gebraic topology, differential geometry.” In point set topology its close connection withmetrizability is utilized.
The following simple example illustrates how the definition works. Consider the real line,which is paracompact, but not compact. Suppose U = {Uα : α ∈ A} is an open coverof R. (For example think of U = {(−α, α) : α > 0}.) Using the compactness of thefinite closed intervals [n, n + 1], n ∈ Z, there exist for each n a finite number of indicesα
(n)1 , . . . α
(n)k(n) ∈ A such that [n, n+ 1] ⊆
⋃k(n)j=1 Uα(n)j
. Define V(n)j = Uα(n)j
∩ (n− 1, n+ 2).
Then {V (n)j : n ∈ Z, j ≤ k(i)} is the desired locally finite refinement that covers R.
The following make implicitly use of some technical properties of manifolds: As an imme-diate consequence of coordinate charts being homeomorphisms onto Rn, every manifold Mis locally compact, meaning that every point p ∈M has an open neighborhood with com-pact closure. Moreover, as a metric (metrizable) space, every manifold is also paracompactand hence normal. Indeed, even stronger than paracompactness, every open cover U of amanifold M has a locally finite open refinement V such that every V ∈ V is diffeomorphicto Rn. In addition, every connected manifold is σ-compact, meaning that it is a countableunion of compact subsets (Compare Spivak vol.I Ch. I, theorem 2 and App. A thm 1).Thus, every open cover of a σ-compact space contains a countable subcover.
-
Classnotes: Geometry & Control of Dynamical Systems, M. Kawski. October 13, 2015 30
Proposition 2.13 (Shrinking lemma) Let U = {Uα : α ∈ A} be a locally finite open cover ofa normal space X. Then there exists an open cover V = {Vα : α ∈ A} such that Vα ⊆ V̄α ⊆ Uαfor every α ∈ A.
Proof. Consider the case when X = M is a connected manifold, and hence σ-compact. (elseapply the following argument to each connected component of M). Hence assume that the opencover is countable, i.e. U = {Ui : i ∈ Z+}Define F1 = M \
(⋃i>1 Ui
). Clearly F1 ⊆ M is closed and F1 ⊆ U1. Using that M is normal,
there is an open set V1 ⊆M such that F1 ⊆ V1 ⊆ V̄1 ⊆ U1. Next define F2 = U2\(V1 ∪
⋃i>2 Ui
).
Again, F2 ⊆M is closed, {V1} ∪ {Ui : i ≥ 2} is still an open cover of MContinue by inductively selecting open sets Vk ⊆M such that Fk ⊆ Vk ⊆ V̄k ⊆ Uk and definingFk+1 = Uk+1 \
(⋃i≤k Vi ∪
⋃i>k+1 Ui
). At each stage {Vi : i ≤ k} ∪ {Ui : i ≥ k + 1} is an open
cover of M . Therefore each Fi+1 ⊆M is closed.We verify that the collection {Vi : i ≥ 1} still covers M : Suppose p ∈ M . Since U is locallyfinite, there exists for a finite number n(p) such that p 6∈ Ui for all i > n(p).