Circuit Simulation of Motor Drive Circuit using PSpice
19
モータ・ドライバ IC のアプリケーション回路シミュレーション デザインキットのロードマップ http://www.bee-tech.com 株式会社ビー・テクノロジー CYBERNET EDA Forum 2008 All Rights Reserved copyright (C) Bee Technologies Inc. 2008
-
Upload
tsuyoshi-horigome -
Category
Technology
-
view
1.294 -
download
2
Transcript of Circuit Simulation of Motor Drive Circuit using PSpice

モータ・ドライバ ICのアプリケーション回路シミュレーション
デザインキットのロードマップ
http://www.bee-tech.com株式会社ビー・テクノロジー
CYBERNET EDA Forum 2008
All Rights Reserved copyright (C) Bee Technologies Inc. 2008

モータ・ドライバ ICのアプリケーション回路シミュレーション
R S B 7 . 5 o h m
L 21 . 5 6 2 m H
I C = - 0 . 5 A
1
2
V 50 s1 0 n s0 V5 V
0
V _ R E F BD C = 1 . 2 5
C v r e f B1 u F
0
0
0V _ R E F A
D C = 1 . 2 5
C v r e f a1 u F
L 1
1 . 5 6 2 m HI C = 0 A
12
R S A7 . 5 o h m
0
R R S A0 . 5R R S B0 . 5
0
V M2 4 V d c C V M
1 0 0 u F
00
0 0
V D5 V d c
C 11 0 u F
0 0
R o s c 3 . 6 k
C o s c 5 6 0 p F
0
0
U 1
T B 6 2 2 0 6 F G
C C P 1 = 0 . 2 2 U FC C P 2 = 0 . 0 2 2 U F
C O S C = 5 6 0 P F
V M = 2 4R N F A = 1 0 0 m VR N F B = 1 0 0 m V
R O S C = 3 . 6 K
F I N
C RV D DV R E F _ AV R E F _ BR S _ B
R S _ AV MC C P _ CC C P _ BC C P _ A S T A N D B Y
O U T _ A 1P H A S E _ AP H A S E _ B
O U T _ A
O U T _ BE N A B L E _ AE N A B L E _ B
O U T _ B 1T O R Q U E
C c c p _ 10 . 2 2 u F
C c c p _ 20 . 0 2 2 u F
V
I
V _ P H A S E _ A
T D = 0
T F = { t f p h a s e }P W = { p w p h a s e }P E R = { t p h a s e }
V 1 = 0
T R = { t r p h a s e }
V 2 = 5 V
V _ P H A S E _ B
T D = { t p h a s e / 4 }
T F = { t f p h a s e }P W = { p w p h a s e }P E R = { t p h a s e }
V 1 = 5 V
T R = { t r p h a s e }
V 2 = 0
TB62206FG(東芝セミコンダクター社 )
Phase current is simulated at fchop=100kHz to predict motor current ripple.
ステッピングモータ
キー・デバイス (IC)TB62206FG
All Rights Reserved copyright (C) Bee Technologies Inc. 2008

モータ・ドライバ ICのアプリケーション回路シミュレーション
TB62206F/FG BiCD PWM 2-Phase Bipolar Stepping Motor Driver
All Rights Reserved copyright (C) Bee Technologies Inc. 2008

モータ・ドライバ ICのアプリケーション回路シミュレーション
TB62206FG(東芝セミコンダクター社 )
All Rights Reserved copyright (C) Bee Technologies Inc. 2008

Device Feature:
• Input logic to drive Bipolar Step Motor
• Internal OSC
• Current Level Set
• Mixed Decay Control
• Charge Pump Unit
• H-Bridge Output
• Protection Unit
モータ・ドライバ ICのアプリケーション回路シミュレーション
All Rights Reserved copyright (C) Bee Technologies Inc. 2008

Datasheet Diagram
Simulation Result
Ti me
40 0u s 40 2 u s 40 4u s 4 0 6us 408 us 4 10 u s 4 12 us 4 14 us 4 16u s 41 8u s 4 20 usI ( VL A)
45 0 mA
50 0 mA
55 0 mAV( OSC)
SEL >>
MIXED DECAY MODE Waveform (current waveform)
モータ・ドライバ IC のアプリケーション回路シミュレーション
All Rights Reserved copyright (C) Bee Technologies Inc. 2008

Ti me
2 . 0 ms 4 . 0 ms0 . 1 ms1 I ( U1 : OUT_ A1 ) 2 V( U1 : PHASE_ A) 3 V( V_ PHASE_ B: +)
- 1 . 0 A
- 0 . 5 A
0 A
0 . 5 A
1 . 0 A
1 . 5 A
2 . 0 A
2 . 5 A
3 . 0 A1
2
- 2 0 V
0 V
2 0 V3
>>
Input Control Signal Phase (A)
Input Control Signal Phase (B)
Motor Phase Current
Current Ripple
Phase Input vs. Phase Output Current ( 250Hz Phase Frequency )
モータ・ドライバ IC のアプリケーション回路シミュレーション
All Rights Reserved copyright (C) Bee Technologies Inc. 2008

Motor Phase Current (Ripple)
Output V(A)
Output V(A\)
T i me
210 us 211 us 21 2u s 213u s 214 us 21 5us 21 6us 2 17us 2 18us 21 9us1 V( X_ U1 . I OUT_ A1) 2 V( U1 : OUT_ A1) V( U1 : OUT_ A)
- 1 00 mV
0V
10 0mV
20 0mV
30 0mV
40 0mV
50 0mV
60 0mV
70 0mV1
>>- 10V
0 V
1 0V
2 0V
3 0V
4 0V
5 0V
6 0V
7 0V2
MIXED DECAY MODE Current Waveform
モータ・ドライバ IC のアプリケーション回路シミュレーション
All Rights Reserved copyright (C) Bee Technologies Inc. 2008

Ccp1 Pin Voltage
STANDBY Input Signal
Ti me
0s 0 . 1 ms 0 . 2 ms 0 . 3ms 0. 4 ms 0 . 5ms 0. 6ms 0 . 7 ms 0 . 8 ms 0 . 9 msV( Cc p _ A) V( STANDBY)
0V
5V
10 V
15 V
20 V
25 V
30 V
35 V
40 V
Charge Pump Rise Time
モータ・ドライバ IC のアプリケーション回路シミュレーション
All Rights Reserved copyright (C) Bee Technologies Inc. 2008

Ti me1 I ( U1 : OUT_ A1 ) 2 I ( U1 : OUT_ B1 )
- 2 . 0 0A
- 1 . 0 0A
0 A
0. 7 5 A1
SEL >>
0 A
1 . 0 0 A
2 . 0 0 A
- 0 . 7 5 A
2
SEL >>
1 V( U1 : ENABLE_ A) 2 V( U1 : ENABL E_ B)- 1 0V
- 5 V
0 V
5 V1
>>0 V
5 V
1 0 V
1 5 V2
1 V( U1 : PHASE_ A) 2 V( U1 : PHASE_ B)- 1 0V
- 5 V
0 V
5 V1
>>0 V
5 V
1 0 V
1 5 V2
Simulation Explore Rate of Current Change
Simulation Result
Half Step Control Signal
モータ・ドライバ IC のアプリケーション回路シミュレーション
All Rights Reserved copyright (C) Bee Technologies Inc. 2008

0
0.002
0.004
0.006
0.008
0.01
0.012
1.E+02 1.E+03 1.E+04 1.E+05
Frequency(Hz)
Ls
(H)
Ls
Phase Inductance (Ls) is selected at phase frequency 100kHzLs = 2.315mH
Phase Inductnace (Ls) vs. Frequency ( ステッピング・モーター )
モータ・ドライバ IC のアプリケーション回路シミュレーション
All Rights Reserved copyright (C) Bee Technologies Inc. 2008
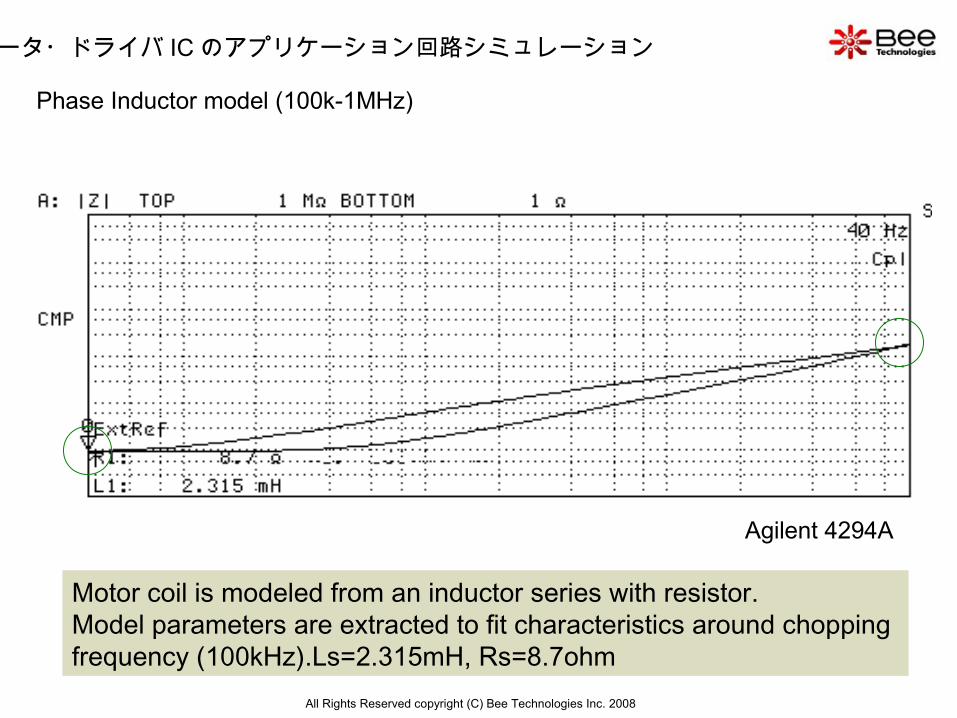
Motor coil is modeled from an inductor series with resistor. Model parameters are extracted to fit characteristics around chopping frequency (100kHz).Ls=2.315mH, Rs=8.7ohm
Phase Inductor model (100k-1MHz)
モータ・ドライバ IC のアプリケーション回路シミュレーション
Agilent 4294A
All Rights Reserved copyright (C) Bee Technologies Inc. 2008
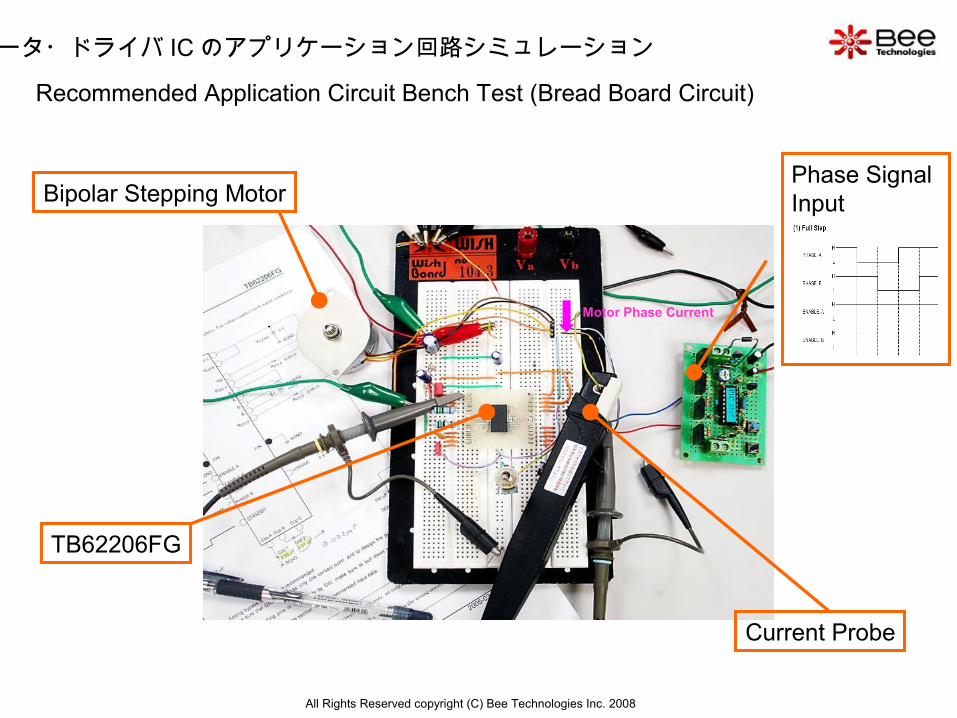
Phase Signal Input
Current Probe
TB62206FG
Bipolar Stepping Motor
Motor Phase Current
Recommended Application Circuit Bench Test (Bread Board Circuit)
モータ・ドライバ IC のアプリケーション回路シミュレーション
All Rights Reserved copyright (C) Bee Technologies Inc. 2008

Measured result show the ripple current
Ripple Current Magnitude
Output V(A)
Motor Phase Current
Output V(A\)
Snap Current
Measured result: Mixed Decay Mode ripple current
モータ・ドライバ IC のアプリケーション回路シミュレーション
All Rights Reserved copyright (C) Bee Technologies Inc. 2008

The result show how model simulate Ripple Current Magnitude at fchop is approximately 100kHz.
Ripple Current Magnitude
Ti me
21 0u s 2 1 1u s 2 1 2u s 21 3u s 21 4u s 2 1 5 us 21 6u s 21 7u s 21 8 us 21 9u s1 V( X_ U1 . I OUT_ A1 ) 2 V( U1 : OUT_ A1) V( U1 : OUT_ A)
- 1 00 mV
0 V
1 00 mV
2 00 mV
3 00 mV
4 00 mV
5 00 mV
6 00 mV
7 00 mV1
>>- 10 V
0 V
10 V
20 V
30 V
40 V
50 V
60 V
70 V2 Motor Phase
Current: V(X_U1.IOUT_A1)
Output V(A\):V(U1:OUT_A1)
Output V(A): V(U1:OUT_A)
Snap Current
Simulated result: (the chopping frequency is approximately 100kHz)
モータ・ドライバ IC のアプリケーション回路シミュレーション
All Rights Reserved copyright (C) Bee Technologies Inc. 2008

デザインキットのロードマップ
デザインキット
スパイスモデル、シミュレーションデータ、解説書がセットになったデザインキットです。各回路方式ごとにご提供しております。ご購入したその日からシミュレーションを実施する事が出来ます。
お客様の用途に合わせた回路方式のデザインキットもご提供可能です。
Forward CouplingConverter(FCC回路 )
Ringing Choke Converter(RCC回路 )
低損失リニアレギュレータ 高精度リニアレギュレータ
All Rights Reserved copyright (C) Bee Technologies Inc. 2008
デザインキットのロードマップ
デザインキット
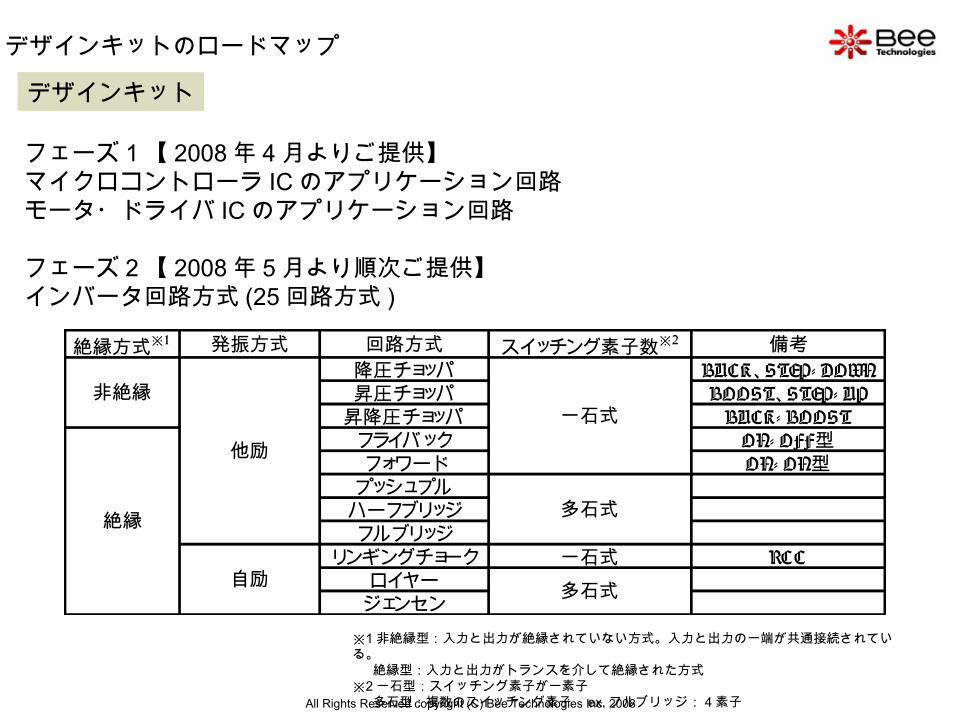
フェーズ 1【 2008年 4月よりご提供】マイクロコントローラ ICのアプリケーション回路モータ・ドライバ ICのアプリケーション回路
フェーズ 2【 2008年 5月より順次ご提供】インバータ回路方式 (25回路方式 )
絶縁方式 1※ 発振方式 回路方式 スイッチング素子数 2※ 備考降圧チョッパ BUCK STEP- DOWN、昇圧チョッパ BOOST STEP- UP、昇降圧チョッパ BUCK- BOOSTフライバック ON- OFF型フォワード ON- ON型プッシュプルハーフブリッジフルブリッジ
リンギングチョーク 一石式 RCCロイヤージェンセン
絶縁
非絶縁一石式
多石式
多石式
他励
自励
※1非絶縁型:入力と出力が絶縁されていない方式。入力と出力の一端が共通接続されている。 絶縁型:入力と出力がトランスを介して絶縁された方式※2一石型:スイッチング素子が一素子 多石型:複数のスイッチング素子 ex.フルブリッジ: 4素子All Rights Reserved copyright (C) Bee Technologies Inc. 2008

デザインキットのロードマップ
デザインキット
フェーズ 2インバータ回路方式 (25回路方式 )
前スライドに示すタイプのようにインダクタのエネルギーの蓄積、放出を制御する方式とは別に、その他の方式としてコンデンサのエネルギーの蓄積と放出を制御するSEPIC、 CUK、 ZETAコンバータがある。これらは基本的に上記分類で他励、一石、非絶縁方式に分類され、絶縁はトランスを介して実現可能であります。
特殊な方式として電流型( Current-Fed)コンバータと呼ばれる方式があります。
All Rights Reserved copyright (C) Bee Technologies Inc. 2008

お問合わせ先 )[email protected]
Bee Technologies Group
【本社】株式会社ビー・テクノロジー〒 105-0012 東京都港区芝大門一丁目 5番 3号大門梅澤ビル 3階代表電話 : 03-5401-3851設立日 :2002年 9月 10日資本金 :8,830 万円 (資本準備金 :1,500万円 )【子会社】Bee Technologies Corporation (アメリカ )Siam Bee Technologies Co.,Ltd. (タイランド )
デバイスモデリングスパイス・パーク (デバイスモデル・ライブラリー ) デザインキットデバイスモデリング教材
All Rights Reserved copyright (C) Bee Technologies Inc. 2008