Chapter13 New

of 44
-
Upload
naumanahmed19 -
Category
Documents
-
view
238 -
download
0
Transcript of Chapter13 New
-
7/30/2019 Chapter13 New
1/44
Chapter 13
Embedded Systems
Dave Bremer
Otago Polytechnic, N.Z.2008, Prentice Hall
Operating Systems:Internals and Design Principles, 6/E
William Stallings
-
7/30/2019 Chapter13 New
2/44
Roadmap
Embedded Systems
Characteristics of Embedded Operating
Systems
eCos
TinyOS
-
7/30/2019 Chapter13 New
3/44
Embedded System
One of the most important and widely
used categories of operating systems
Hardware and software designed to
perform a dedicated function
Tightly coupled to their environment
Often, embedded systems are part of alarger system or product,
E.G. antilock braking system in a car.
-
7/30/2019 Chapter13 New
4/44
Real Time
Embedded systems are tightly coupled to
their environment.
This imposes real-time constraints by the
need to interact with the environment.
required speeds of motion,
required precision of measurement,
required time durations.
-
7/30/2019 Chapter13 New
5/44
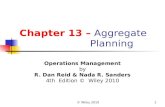
Examples of
Embedded Devices
-
7/30/2019 Chapter13 New
6/44
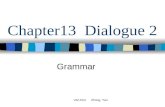
Embedded System
Organization
-
7/30/2019 Chapter13 New
7/44
Differences from
typical computer A variety of Interfaces.
Use of a diagnostic.
Special purpose hardware may be used toincrease performance or safety.
Field programmable (FPGA),
application specific (ASIC),
or even nondigital hardware.
Single purpose software.
-
7/30/2019 Chapter13 New
8/44
Roadmap
Embedded Systems
Characteristics of Embedded Operating
Systems
eCos
TinyOS
-
7/30/2019 Chapter13 New
9/44
Characteristics of
Embedded OS Real-time operation
Reactive operation
Configurability I/O device flexibility
Streamlined protection mechanisms
Direct use of interrupts
-
7/30/2019 Chapter13 New
10/44
Developing an
Embedded OS Two general approaches
Take an existing OS and adapt it for
embedded purposes
Design a purpose-built OS solely for
embedded use
-
7/30/2019 Chapter13 New
11/44
Adapting an
Existing OS Examples include Windows, Linux, BSD
Generally slower than special purpose OS
Advantage is familiar interface
Need to add
real-time capability
Streamlining operation
Add other specialized and necessary
functionality for the given device
-
7/30/2019 Chapter13 New
12/44
Purpose-Built
Embedded OS Typical characteristics include:
fast and lightweight process or thread switch
Scheduling policy is real time and dispatcher
module is part of scheduler
Small size
Responds to external interrupts quickly
Minimizes intervals during which interruptsare disabled
-
7/30/2019 Chapter13 New
13/44
Timing Constraints
To deal with timing constraints, the kernel:
Provides bounded execution time for
primitives
Maintains a real-time clock
Provides for special alarms and timeouts
Supports real-time queuing disciplines
Provides primitives to delay processing by afixed amount of time and to suspend/resume
execution
-
7/30/2019 Chapter13 New
14/44
Roadmap
Embedded Systems
Characteristics of Embedded Operating
Systems
eCos
TinyOS
-
7/30/2019 Chapter13 New
15/44
eCos: Embedded
Configurable OS Open source, Royalty-free
Real-time OS
Most widely used embedded OS Targeted at high-performance small
embedded systems.
An embedded form of Linux or othercommercial OS would not provide the
streamlined software required.
-
7/30/2019 Chapter13 New
16/44
eCos Configuration Tool
-
7/30/2019 Chapter13 New
17/44
eCos Configuration Tool
-
7/30/2019 Chapter13 New
18/44
Loading an eCos
Configuration
-
7/30/2019 Chapter13 New
19/44
eCos
Layered Structure
-
7/30/2019 Chapter13 New
20/44
Hardware
Abstraction Layer Presents consistent
API to upper layers
Different for each
hardware platform
-
7/30/2019 Chapter13 New
21/44
HAL
-
7/30/2019 Chapter13 New
22/44
HAL Modules
Architecture
Processor family type
Variant
Support features of specific processor
Platform
Support of tightly coupled peripherals
-
7/30/2019 Chapter13 New
23/44
eCos Kernel Design
The eCos kernel was designed to satisfy
four main objectives:
Low interrupt latency
Low task switching latency
Small memory footprint
Deterministic behavior
-
7/30/2019 Chapter13 New
24/44
Not in eCos Kernel
Memory allocation
Device driver
This makes for a lean kernel.
-
7/30/2019 Chapter13 New
25/44
eCos I/O System
Framework for supporting device drivers
A variety of drivers are available through
the configuration package
Principle objective is efficiency with no
unnecessary software layering
-
7/30/2019 Chapter13 New
26/44
eCos Scheduler
Bitmap scheduler
Efficient for small number of threads active
Each thread has different priority
Multilevel queue scheduler
Appropriate when number of threads is
dynamic
Multiple threads at each priority
Time slicing
-
7/30/2019 Chapter13 New
27/44
Bitmap Scheduler
Priority Levels
-
7/30/2019 Chapter13 New
28/44
Multilevel Queue
Scheduler Priorities
-
7/30/2019 Chapter13 New
29/44
eCos Thread
Synchronization Classic mechanisims
Mutexes
Semaphores
Condition variables synchronization/communication mechanisms
Event flags
Mailboxes
SMP support(symmetric multiprocessing) Spinlocks
-
7/30/2019 Chapter13 New
30/44
Mutexes
-
7/30/2019 Chapter13 New
31/44
Mutexes and Condition
Variables
-
7/30/2019 Chapter13 New
32/44
Mutexes and Condition
Variables
-
7/30/2019 Chapter13 New
33/44
Roadmap
Embedded Systems
Characteristics of Embedded Operating
Systems
eCos
TinyOS
-
7/30/2019 Chapter13 New
34/44
TinyOS
400 bytes of code
Not a real-time OS
No kernel
There are no processes;
OS doesnt have a memory allocation system
interrupt and exception handling is
dependent on the peripheral; and
Nonblocking, so there are few explicit
synchronization primitives.
-
7/30/2019 Chapter13 New
35/44
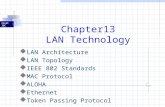
Wireless Sensor Network
Topology
-
7/30/2019 Chapter13 New
36/44
TinyOS Goals
With the tiny distributed sensor application
in mind, the following goals were set for
TinyOS:
Allow high concurrency
Operate with limited resources
Adapt to hardware evolution
Support a wide range of applications
Support a diverse set of platforms
Be robust
-
7/30/2019 Chapter13 New
37/44
TinyOS Components
Embedded software systems built with
TinyOS consist of a set of modules
called components
Such as:
Single-hop networking
Ad-hoc routing
Power management
Times
Nonvolatile storage control
-
7/30/2019 Chapter13 New
38/44
TimerM Component
-
7/30/2019 Chapter13 New
39/44
TimerM Configuration
-
7/30/2019 Chapter13 New
40/44
TinyOS Scheduler
Operates across all components
Only one task executes at one time
Simple FIFO queue Schedular is power aware
Puts processor to sleep when no task in
queue
S A E l
-
7/30/2019 Chapter13 New
41/44
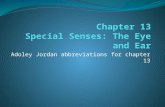
Surge: An Example
TinyOS Application
-
7/30/2019 Chapter13 New
42/44
Configuration for Surge
Ti OS
-
7/30/2019 Chapter13 New
43/44
TinyOS
Resource Interface TinyOS provides a simple but powerful set
of conventions for dealing with resources.
Dedicated
Virtualized
Shared
Sh d R
-
7/30/2019 Chapter13 New
44/44
Shared Resource
Configuration