Dr Tahir Saeed, Clinical Psychologist Dr Samra Tahir, Clinical Psychologist.

7.1
CHAPTER 7
BIODYNAMICS: A LAGRANGIANAPPROACH
Donald R. PetersonBiodynamics Laboratory at the Ergonomic Technology Center,University of Connecticut Health Center, Farmington,Connecticut
Ronald S. AdrezinUniversity of Hartford, College of Engineering, West Hartford,Connecticut
7.1 MOTIVATION 7.1 7.5 INTRODUCTION TO THE KINEMATICS7.2 THE SIGNIFICANCE OF DYNAMICS 7.3 TABLE METHOD 7.177.3 THE BIODYNAMIC SIGNIFICANCE OF 7.6 BRIEF DISCUSSION 7.25
THE EQUATIONS OF MOTION 7.4 7.7 IN CLOSING 7.257.4 THE LAGRANGIAN (AN ENERGY REFERENCES 7.26
METHOD) APPROACH 7.4
Athletic performance, work environment interaction, and medical sciences involving rehabilitation,orthotics, prosthetics, and surgery rely heavily on the analysis of human performance. Analyzinghuman motion allows for a better understanding of the anatomical and physiological processesinvolved in performing a specific task, and is an essential tool for accurately modeling intrinsic andextrinsic biodynamic behaviors (Peterson, 1999). Analytical dynamic models (equations of motion)of human movement will assist the researcher in identifying key forces, movements, and movementpatterns to measure, providing a base or fundamental model from which an experimental approachcan be determined and the efficacy of initially obtained data can be evaluated. At times, the funda-mental model may be all that is required if laboratory or field-based measurements prove to be costlyand impractical. Finally, it permits the engineer to alter various assumptions and/or constraints of theproblem and compare the respective solutions, ultimately gaining an overall appreciation for thenature of the dynamics.
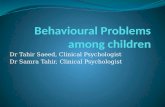
As an example, consider the motion of an arm-forearm system illustrated in Fig. 7.1. Thecorresponding equation of motion for the elbow joint (point C), or a two-link, multibody system isgiven in Eq. (7.1).
(7.1)
7.1 MOTIVATION
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
Source: STANDARD HANDBOOK OF BIOMEDICAL ENGINEERING AND DESIGN

7.2 MECHANICS OF THE HUMAN BODY
where I = mass moment of inertia of the forearmm = mass of the forearm
MElbow = moment at the elbow created by the musclesMApplied = moment due to externally applied loads
l = distance from the elbow to the center of mass (G2) of the forearmθ = angle between the forearm and the horizontal plane
FIGURE 7.1 The bones of the arm, forearm, and hand with linesegments superimposed. (Note that the line segments and pointscoincide with Figs. 7.6, 7.7, and 7.8. Point G2 represents the centerof gravity for segment CD, or the forearm.)
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
BIODYNAMICS: A LAGRANGIAN APPROACH

BIODYNAMICS: A LAGRANGIAN APPROACH 7.3
By solving for the moment created by the muscles at the elbow, an estimation of the effort requiredduring a forearm movement activity can be determined.
In order to yield estimates for each term within the equations of motion for a biodynamic system,an experimental approach involving the simultaneous collection of information from severalmodalities would be required. More specifically, sensors such as accelerometers (to measureacceleration or vibration), inclinometers (to measure displacement or position), load cells or forcesensitive resistors (to measure applied load or grip forces), and electrogoniometers (to measureanatomic angles) should be considered. The selection of modalities, and their respective sensors, willdepend upon the nature of the terms given in the equations of motion. In addition, estimates ofanthropometric quantities involving mass, segment length, location of the center of mass, and themass moment of inertia of each body segment are also required. It should be understood that thesemodalities might be costly to purchase and operate, and can generate large volumes of data that mustbe analyzed and modeled properly in order to yield practical estimates for each desired term. Theresults for each term can then be substituted into the equation of motion to model the dynamicbehavior of the system. This approach to modeling the biodynamics of the human musculoskeletalsystem has proved to be extremely valuable for investigating human motion characteristics in settingsof normal biomechanical function and in settings of disease (Peterson, 1999).
This chapter presents a straightforward approach to developing dynamic analytical models ofmultirigid body systems that are analogous to actual anatomic systems. These models can yieldoverall body motion and joint forces from estimated joint angles and applied loads, and even beginto structure dynamic correlations such as those between body segment orientations and body segmentkinematics and/or kinetics. The applications of these equations to clinical or experimental scenarioswill vary tremendously. It is left to the reader to utilize this approach, with the strong suggestion ofreviewing the current literature to identify relevant correlations significant to their applications.Listing and discussing correlations typically used would be extensive and beyond the scope of thischapter.
The theory and applications of engineering mechanics is not strictly limited to nonliving systems. Theprinciples of statics and dynamics, the two fundamental components within the study of engineeringmechanics, can be applied to any biological system. They have proved to be equally effective inyielding a relatively accurate model of the mechanical state of both intrinsic and extrinsic biologicalstructures (Peterson, 1999). In fact, nearly all of the dynamic phenomena observed within living andnonliving systems can be modeled by using the principles of rigid body kinematics and dynamics.Most machines and mechanisms involve multibody systems where coupled dynamics exist betweentwo or more rigid bodies. Mechanized manipulating devices, such as a robotic armature, are mechani-cally analogous to the human musculoskeletal system, which is an obvious multibody system. Conse-quently, the equations of motion governing the movement of the armature will closely resemble theequations derived for the movement of an extremity (i.e., arm or leg).
Careful steps must be taken in structuring the theoretical approach, particularly in identifying theinitial assumptions required to solve the equations of motion. By varying any of the initialassumptions (and the justification for making them), the accuracy of the model is directly affected.For example, modeling a human shoulder joint as a mechanical ball and socket neglects theshoulder’s ability to translate and thus prohibits any terms describing lateral motion exhibited by thejoint. Therefore, any such assumption or constraint should be clearly defined on the basis of thedesired approach or theoretical starting point for describing the dynamics of the system. Elasticity isanother example of such a constraint, and is present to some degree within nearly all of the dynamicsof a biological system. Ideally, elasticity should not be avoided and will have direct implications ondetermining the resulting dynamic state of the system.
7.2 THE SIGNIFICANCE OF DYNAMICS
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
BIODYNAMICS: A LAGRANGIAN APPROACH

7.4 MECHANICS OF THE HUMAN BODY
The equations of motion are dynamic expressions relating kinematics with forces and moments. In amusculoskeletal biodynamic system, the forces and moments will consist of joint reactions; internalforces, such as muscle, tendon, or ligament forces; and/or externally applied loads. Consequently, theequations of motion can provide a critical understanding of the forces experienced by a joint andeffectively model normal joint function and joint injury mechanics. They can yield estimates forforces that cannot be determined by direct measurement. For example, muscle forces, which aretypically derived from other quantities such as external loads, center of mass locations, and empiricaldata including anatomical positioning and/or electromyography, can be estimated.
In terms of experimental design, the equations of motion can provide an initial, theoreticalunderstanding of an actual biodynamic system and can aid in the selection of the dynamic propertiesof the actual system to be measured. More specifically, the theoretical model is an initial basis that anexperimental model can build upon to determine and define a final predictive model. This mayinvolve comparative and iterative processes used between the theoretical and actual models, withcareful consideration given to every assumption and defined constraint.
Biodynamic models of the human musculoskeletal system have direct implications on device/tooldesign and use and the modeling of normal and/or abnormal (or undesired) movements or movementpatterns (the techniques with which a device or tool is used). Applications of the models can providea better understanding for soft and hard tissue injuries, such as repetitive strain injuries (RSI), and canbe used to identify and predict the extent of a musculoskeletal injury (Peterson, 1999).
The equations of motion for a dynamic system can be determined by any of the following fourmethods:
1. Newton-Euler method2. Application of Lagrange’s equation3. D’Alembert’s method of virtual work4. Principle of virtual power using Jourdain’s principle or Kane’s equation
Within this chapter, only the first two methods are discussed. For a detailed discussion of othermethods, consult the references.
The Newton-Euler (Newtonian) approach involves the derivation of the equations of motion fora dynamic system using the Newton-Euler equations, which depend upon vector quantities andaccelerations. This dependence, along with complex geometries, may promote derivations for theequations of motion that are timely and mathematically complex. Furthermore, the presence ofseveral degrees of freedom within the dynamic system will only add to the complexity of thederivations and final solutions.
The energy method approach uses Lagrange’s equation (and/or Hamilton’s principle, ifappropriate) and differs from the newtonian approach by the dependence upon scalar quantities andvelocities. This approach is particularly useful if the dynamic system has several degrees of freedomand the forces experienced by the system are derived from potential functions. In summary, theenergy method approach often simplifies the derivation of the equations of motion for complexmultibody systems involving several degrees of freedom as seen in human biodynamics.
Within this section, several applications of the Lagrangian approach are presented anddiscussed. In particular, Lagrange’s equation is used to derive the equations of motion for severaldynamic systems that are mechanically analogous to the musculoskeletal system. A briefintroduction of Lagrange’s equation is provided, however, the derivation and details are left to
7.3 THE BIODYNAMIC SIGNIFICANCE OF THE EQUATIONS OFMOTION
7.4 THE LAGRANGIAN (AN ENERGY METHOD) APPROACH
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
BIODYNAMICS: A LAGRANGIAN APPROACH

BIODYNAMICS: A LAGRANGIAN APPROACH 7.5
other sources identified in the references. Also note that an attempt was made to be consistent withthe symbols used from figure to figure to allow the reader to correlate the demonstrated examples.
The application of Lagrange’s equation to a model of a dynamic system can be conceptualized in sixsteps (Baruh, 1999):
1. Draw all free-body diagrams.2. Determine the number of degrees of freedom in the system and select appropriate independent
generalized coordinates.3. Derive the velocity for the center of mass of each body and any applicable virtual displacements.4. Identify both conservative and nonconservative forces.5. Calculate the kinetic and potential energy and the virtual work.6. Substitute these quantities into Lagrange’s equation and solve for the equations of motion.
A system determined to have n degrees of freedom would correspondingly have n generalizedcoordinates denoted as qk, where k may have values from 1 to n. A generalized, nonconservativeforce corresponding to a specific generalized coordinate is represented by Qk, where k again mayrange from 1 to n. The derivative of qk with respect to time is represented as . Equation (7.2) showsthe general form of Lagrange’s equation.
(7.2)
The Lagrangian L is defined as the difference between the kinetic energy T and the potential energyV:
(7.3)
After determining the Lagrangian, differentiating as specified in (7.2) will result in a set of n scalarequations of motion due to the n degrees of freedom.
Since the Lagrangian approach yields scalar equations, it is seen as an advantage over aNewtonian approach. Only the velocity vector v, not the acceleration, of each body is required andany coordinate system orientation desired may be chosen. This is a result of the kinetic energyexpressed in terms of a scalar quantity as demonstrated in Eq. (7.4).
(7.4)
For certain problems where constraint forces are considered, a Newtonian approach, or the applica-tion of both techniques, may be necessary. The following sections will present some applications ofLagrange’s equation as applicable to human anatomical biodynamics. Other mechanically basedexamples are easily found within the cited literature (Baruh, 1999; Moon, 1998; Wells, 1967).
Single Viscoelastic Body with Two Degrees of Freedom. Consider a single viscoelastic body pendulumthat consists of a mass suspended from a pivot point by a spring of natural length l and a dashpot, as
7.4.1 Brief Introduction to Lagrange’s Equation
7.4.2 Biodynamic Models of Soft Tissue
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
BIODYNAMICS: A LAGRANGIAN APPROACH

7.6 MECHANICS OF THE HUMAN BODY
seen in Fig. 7.2. The system is constrained to move within the r-θ plane, and is acted upon by agravitational field of magnitude g, which acts in the negative vertical direction; r and θ are determinedto be the only two generalized coordinates, since the motion of the mass is limited to movement in theradial and transverse (r or θ respectively) directions only. A model of this type can be used as amechanical analogy to structure an approach to investigate the dynamics of soft tissues such as amuscle.
The velocity of the mass is given by
in the r-θ frame of reference or, in terms of the b1, b2, b3 frame of reference,
(7.5)
The origin of this reference frame is considered to be located at the pivot point, as seen in Fig. 7.2.The kinetic energy of the system can be represented in vector form as
(7.6)
FIGURE 7.2 Single elastic body pendulum with two springs and one dashpot (point G1 represents thecenter of gravity of the pendulum).
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
BIODYNAMICS: A LAGRANGIAN APPROACH

BIODYNAMICS: A LAGRANGIAN APPROACH 7.7
where m is mass and v is the velocity vector. Substituting Eq. (7.5) into Eq. (7.6) yields
(7.7)
The potential energy of the system is determined to be
(7.8)
Rayleigh’s dissipation function is applied in order to properly handle the viscous component of thegiven dynamic system. In this case, it is assumed that the viscous nature of the dashpot will be linearlydependent upon the velocity of the mass. More specifically, the viscous damping force is consideredto be proportional to the velocity of the mass and is given by the following relation,
(7.9)
Equation (7.9) is expressed in terms of the generalized coordinate r, where c is defined as thecoefficient of proportionality for viscous damping. Rayleigh’s dissipation function is defined as
(7.10)
Further information concerning the definition and use of Rayleigh’s dissipation function can befound in the references.
Lagrange’s equation can be modified to accommodate the consideration of the viscous dampingforces within the dynamic system. Subsequently, Eq. (7.2) can be rewritten as
(7.11)
where the Lagrangian, L = T - V, is determined by using Eqs. (7.7) and (7.8),
(7.12)
By applying Lagrange’s equation (7.11), and using the first generalized coordinate r, where
(7.13)
each term of Eq. (7.11) can easily be identified by differentiation of Eq. (7.12). The resultingrelations are
(7.14)
so that
(7.15)
and (7.16)
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
BIODYNAMICS: A LAGRANGIAN APPROACH

7.8 MECHANICS OF THE HUMAN BODY
Similarly, the term for the dissipation function can be shown to be
(7.17)
and the generalized force, Qr = 0, since there are no externally applied forces acting on the system inthe radial direction. By insertion of Eqs. (7.15), (7.16), and (7.17) into Eq. (7.11), the equation ofmotion in the r direction is
(7.18)
Lagrange’s equation must now be solved by using the second generalized coordinate θ, where
(7.19)
By using the same approach as seen for the first generalized coordinate, the resulting differentialrelations are
(7.20)
so that
(7.21)
and (7.22)
The dissipation function in terms of the second generalized coordinate is shown to be
(7.23)
and the generalized force, Qθ = 0, since there are no externally applied torques acting on the systemin the θ direction. By insertion of Eqs. (7.21), (7.22), and (7.23) into Eq. (7.11), the equation ofmotion in the θ direction is
(7.24)
Through simplification and rearranging of terms, Eqs. (7.18) and (7.24) can be rewritten as
(7.25)
and (7.26)
respectively, yielding the equations of motion for the spring-dashpot pendulum system. Note thatEqs. (7.25) and (7.26) are also the equations of motion obtained by using Newton’s laws.
Single Elastic Body with Two Degrees of Freedom. Next, consider a single elastic body pendulumconsisting of a mass suspended from a pivot point. Assume that the mass is suspended solely by aspring of natural length l, as seen in Fig. 7.3, and that the system experiences no viscous damping. Asbefore, the system is constrained to move within the vertical, or r-θ plane, and is acted upon by agravitational field g, which acts in the negative vertical direction; r and θ are again determined to bethe only two generalized coordinates, since the motion of the mass is constrained to movement within
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
BIODYNAMICS: A LAGRANGIAN APPROACH

BIODYNAMICS: A LAGRANGIAN APPROACH 7.9
the r-θ plane only. The spring pendulum system of Fig. 7.3 is another mechanically analogous systemthat can also be used to initially model the dynamic behavior of soft tissues.
The steps needed to determine the equations of motion for this system are essentially the steps forthe previous system in Fig. 7.2. In this example, the effects of viscous damping are neglected, therebyomitting Rayleigh’s dissipation function within the solution. This is a simple omission where removalof the dissipation function from Lagrange’s equation will have an impact on the final solutions.
The velocity of the mass remains the same as before and is given by
(7.27)
The kinetic energy of the system,
(7.28)
and the potential energy of the system,
(7.29)
FIGURE 7.3 Single elastic body pendulum with one spring (point G1 represents the center of gravity ofthe pendulum).
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
BIODYNAMICS: A LAGRANGIAN APPROACH

7.10 MECHANICS OF THE HUMAN BODY
are also the same, and therefore, the lagrangian will not change,
(7.30)
With the omission of the dissipation function, Lagrange’s equation is solved for each of the chosengeneralized coordinates: q1 = r, Eq. (7.31), and q2 = θ, Eq. (7.32).
(7.31)
(7.32)
Simplificating and rearranging Eqs. (7.31) and (7.32) yields the two equations of motion:
(7.33)
and (7.34)
Once again, Eqs. (7.33) and (7.34) are the same equations of motion obtained by the Newtonianapproach.
Consider the two-segment system shown in Fig. 7.4, where a single segment of length l3 is connected toa large nontranslating cylinder at point B. For initial simplicity, it is assumed that for this system, theconnection of the segment is that of a revolute (or hinge) joint having only one axis of rotation. Thefree-moving end of the segment is identified as point C, while point G1 identifies the center of gravityfor this segment. The large cylinder of height l1 and radius l2 (e.g., torso) is fixed in space and is freeto rotate about the vertical axis at some angular speed Ω. A moving coordinate system b1, b2, b3 is fixedat point B and is allowed to rotate about the b3 axis so that the unit vector b1 will always lie on segmentBC. This particular system considers only one segment, which can represent the upper arm or thigh, andis presented as an initial step for dynamically modeling the human upper or lower extremity. Tocomplete the extremity model, additional segments are subsequently added to this initial segment. Thederivations of the models involving additional segments are presented later within this section.
The position vectors designating the locations of point B, G, and C are given as
(7.35)
(7.36)
and (7.37)
respectively.The angular velocity vector of segment BC is determined to be
(7.38)
where θ1 is the angle between the segment and the vertical and is the time rate of change of thatangle.
7.4.3 Biodynamically Modeling the Upper or Lower Extremity
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
BIODYNAMICS: A LAGRANGIAN APPROACH

BIODYNAMICS: A LAGRANGIAN APPROACH 7.11
The components for the mass moment of inertia about point G1 in the b1, b2, b3 frame of reference are
(7.39)
and (7.40)
The kinetic energy of segment BC is defined by the equation
(7.41)
where vG1 is the velocity vector of segment taken at the center of mass. This vector is determined byusing the relative velocity relation
(7.42)
where vB is the velocity vector for point B and is
(7.43)
and is the relative position vector for point G1 as defined from point B and is
(7.44)
FIGURE 7.4 Two-segment model: one rigid segment connected to a nontranslating cylinder.
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
BIODYNAMICS: A LAGRANGIAN APPROACH

7.12 MECHANICS OF THE HUMAN BODY
Substitution of Eqs. (7.43) and (7.44) into Eq. (7.42) yields
(7.45)
which is solved to be
(7.46)
Therefore, Eq. (7.41) can be written by using Eqs. (7.38), (7.39), (7.40), and (7.46):
(7.47)
and simplified to the final form of the kinetic energy for the system:
(7.48)
The potential energy of the system is simply
(7.49)
The lagrangian for segment BC, L1, is subsequently determined to be
(7.50)
Applying Lagrange’s equation (7.11) and using the only generalized coordinate for this system, θ1,
(7.51)
each term of Eq. (7.11) can easily be identified by differentiation of Eq. (7.50). The derivative of L1
with respect to θ1 is solved accordingly:
(7.52)
which reduces to
(7.53)
The derivative of L1 with respect to is
(7.54)
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
BIODYNAMICS: A LAGRANGIAN APPROACH

BIODYNAMICS: A LAGRANGIAN APPROACH 7.13
So that
(7.55)
The appropriate terms can be substituted into Lagrange’s equation (7.11) to give
(7.56)
since there are no externally applied torques acting on the system in the θ1 direction. The resultingequation of motion for the one-segment system is solved as
(7.57)
Next, consider an additional segment added to the two-segment system, in the previous example, asseen in Fig. 7.5. Assume that the additional segment added adjoins to the first segment at point C byway of a revolute joint. The new segment is of length l4, with point D defining the free-moving endof the two-segment system and point G2 identifies the center of gravity for the second segment. Anadditional moving body-fixed, coordinate system c1, c2, c3 is defined at point C and is allowed torotate about the c3 axis so that the unit vector c1 will always lie on segment CD.
FIGURE 7.5 Two rigid segments connected to a nontranslating cylinder.
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
BIODYNAMICS: A LAGRANGIAN APPROACH

7.14 MECHANICS OF THE HUMAN BODY
New position vectors designating the locations of point G2 and D are given as
(7.58)
and (7.59)
respectively for the new segment.When solving a three-segment system as the one seen in Fig. 7.5, the kinetic and potential energy
must be determined independently for each segment. Since the kinetic and potential energy wassolved previously for segment BC and is given in Eqs. (7.48) and (7.49), consideration needs to begiven only to segment CD.
In a similar manner as before, the angular velocity vector of segment CD is determined to be
(7.60)
where θ2 is the angle between the segment and the vertical and is the time rate of change of theangle. Also, the components for the mass moment of inertia about point G2 in the c1, c2, c3 frame ofreference are
(7.61)
and (7.62)
and the kinetic energy of segment CD is defined by the equation
(7.63)
where the velocity vector at point G2 is
(7.64)
In order to solve Eq. (7.64), the velocity vector at point C and the cross product must be determined.
so that
(7.65)
and (7.66)
(7.67)
Note that Eq. (7.67) contains velocity terms from both moving coordinate systems b1, b2, b3 and c1, c2,c3 and should be represented entirely in terms of c1, c2, c3. Therefore, a coordinate transformationmatrix is defined that will manage this.
so that
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
BIODYNAMICS: A LAGRANGIAN APPROACH

BIODYNAMICS: A LAGRANGIAN APPROACH 7.15
(7.68)
From Eq. (7.68), the velocity at point G2 becomes
(7.69)
Substituting Eqs. (7.61), (7.62), and (7.69) into Eq. (7.63), the equation for the kinetic energy ofsegment CD, and solving gives
(7.70)
and the potential energy of segment CD is determined to be
(7.71)
The total kinetic and potential energy of the system can be determined by summation of
(7.72)
and (7.73)
respectively, where the lagrangian for the system is given by
(7.74)
It is left to the reader to apply Lagrange’s equation (7.11), using the two generalized coordinates ofthe two-segment system, q1 = θ1 and q2 = θ2, to work through the mathematics involved in solving Eq.(7.11) to yield the equations of motion. For the first generalized coordinate, q1 = θ1, the equation ofmotion is solved to be
(7.75)
For the second generalized coordinate, q2 = θ2, the equation of motion is solved to be
(7.76)
To complete the hand-arm or foot-leg system, consider yet another additional segment added to thethree-segment system, as seen in Fig. 7.6. As before, it is assumed that the additional segment added
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
BIODYNAMICS: A LAGRANGIAN APPROACH

7.16 MECHANICS OF THE HUMAN BODY
adjoins to the second segment at point D by way of a revolute joint. The new segment is of length l5,with point E defining the free-moving end of the four-segment system and point G3 identifying thecenter of gravity for the third segment. An additional moving coordinate system d1, d2, d3 is definedat point D and is allowed to rotate about the d3 axis so that the unit vector d1 will always lie onsegment DE.
The solution to the four-segment system is obtained in a similar manner to that of the three-segment system with careful consideration of the coordinate transformations. It is not providedbecause of its bulky content and is left for the reader to solve.
The kinematics table, shown in Table 7.1, introduces a method (referred to within this chapter as thetable method) for efficiently managing the mathematics involved in analyzing multibody and mul-tiple coordinate system problems, and can be used in either the Lagrangian or the Newton-Eulerapproach. A schematic diagram, which defines an inertial or body-fixed coordinate system, mustaccompany every kinematics table. The purpose of the schematic is to identify the point on the bodyat which the absolute velocity and acceleration is to be determined. The corresponding schematic forTable 7.1 is shown in Fig. 7.7.
The kinematics table is divided into three sections.
1. Top section (rows a, b, and c): Acts as a worksheet to assist in the writing of the expressions for thenext two sections.
FIGURE 7.6 Three rigid segments connected to a nontranslating cylinder.
7.5 INTRODUCTION TO THE KINEMATICS TABLE METHOD
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
BIODYNAMICS: A LAGRANGIAN APPROACH

BIODYNAMICS: A LAGRANGIAN APPROACH 7.17
2. Middle section (rows d, e, and f): Summed to yield theabsolute velocity (velocity with respect to an inertialframe of reference) of point P.
3. Bottom section (rows g, h, i, j, and k): Summed to yieldthe absolute acceleration (acceleration with respect toan inertial frame of reference) of point P.
All terms in the first column are vectors and are resolvedinto their vector components in columns 2, 3, and 4. Notethat the unit vectors of the selected coordinate system arewritten at the top of columns 2, 3, and 4.
For a multibody system, each body would require akinematics table and a corresponding schematic. Thefollowing examples illustrate the steps required for solvingproblems by the table method. Note that one exampleincludes the expressions for acceleration to demonstratethe use of the table method with the Newton-Eulerapproach, while all other examples consider only thevelocity.
TABLE 7.1 Blank Kinematics Table
FIGURE 7.7 Schematic to accompany the kinemat-ics table (Table 7.1).
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
BIODYNAMICS: A LAGRANGIAN APPROACH

7.18 MECHANICS OF THE HUMAN BODY
The upper arm, simplified as a single rigid body, is shown in Fig. 7.8. The velocity and accelerationfor the center of mass of the arm are derived and presented in two coordinate systems. Table 7.2presents the kinematics in an inertial coordinate system, while Table 7.3 utilizes a body-fixed, movingcoordinate system. For this system, not unlike the two-segment system of Fig. 7.4, a moving coordi-nate system b1, b2, b3 is fixed at point B and is allowed to rotate about the b3 axis so that the unitvector b1 will always lie on segment BC.
From Tables 7.2 and 7.3, the absolute velocity of the center of gravity, or point G1, is
(7.77)
in the i, j, k and b1, b2, b3 frame of references respectively.The absolute acceleration is
(7.78)
7.5.1 Single Rigid Body with a Single Degree of Freedom
FIGURE 7.8 Single rigid body pendulum (point G1 represents the center of gravity of thependulum and is fixed).
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
BIODYNAMICS: A LAGRANGIAN APPROACH

BIODYNAMICS: A LAGRANGIAN APPROACH 7.19
TABLE 7.2 Kinematics Table for the Single Rigid Body in an Inertial Coordinate System
TABLE 7.3 Kinematics Table for the Single Rigid Body in a Body-Fixed Coordinate System
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
BIODYNAMICS: A LAGRANGIAN APPROACH

7.20 MECHANICS OF THE HUMAN BODY
in the i, j, k and b1, b2, b3 frame of references, respectively. In applying either form of Eq. (7.77), thekinetic energy of the arm is found to be
(7.79)
The gravitational potential energy of the arm is
(7.80)
Substituting Eqs. (7.79) and (7.80) into the lagrangian, Eq. (7.3), results in
(7.81)
Substituting Eq. (7.81) into Eq. (7.2) with k = θ1 results in the equation of motion for the upper arm(assuming that the torso is fixed), as shown in Eq. (7.82). Q? would include all nonconservative orexternally applied torques.
(7.82)
where , which can be found by using the parallel axis theorem.In a similar manner to the derivation of the three-segment system of Fig. 7.5, a coordinate
transformation matrix is defined in order to convert between coordinate systems. A transformationbetween the b frame and the inertial frame for a single rotation, θ1, about the b3 axis in matrix formis shown in Eq. (7.83).
(7.83)
This results in the following equations:
(7.84)
In transferring a velocity or acceleration from one table to the next, a conversion between frames, asshown in Eq. (7.68), or a conversion from the b frame to the inertial frame as in Eqs. (7.83) and(7.84), and then from the inertial into the c frame, may be used.
Table 7.4 is the kinematics table for the single elastic body pendulum shown in Fig. 7.3. Theabsolute velocity of the center of mass G1 is required to complete the Lagrangian approach, and theNewtonian approach utilizes the absolute acceleration of point G1, Eq. (7.86), in forproblems of constant mass.
The absolute velocity and acceleration of G1 are expressed in terms of the body-fixed coordinatesystem, b1, b2, b3, which is fixed to the pendulum and rotates about the b3 axis as before. Although itis equivalent to expressing within the inertial frame of reference, i, j, k, the body-fixed coordinatesystem, b1, b2, b3, uses fewer terms. The velocity and acceleration for G1 are respectively as follows:
7.5.2 Single Elastic Body with Two Degrees of Freedom
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
BIODYNAMICS: A LAGRANGIAN APPROACH

BIODYNAMICS: A LAGRANGIAN APPROACH 7.21
(7.85)
and (7.86)
It is clear that the multilink systems of Figs. 7.4, 7.5, and 7.6 are applicable to many biodynamicscenarios. They can represent a torso with an upper or lower extremity, as well as several othercombinations of multibody problems, as can be seen within the cited references.
If the multibody system represented in Fig. 7.6 is considered to represent a human torso, upperarm, forearm, and hand, then Table 7.5 results in the velocity at the shoulder (point B) expressed inthe body-fixed coordinate system of the torso segment, a1, a2, a3. Similarly, the b1, b2, b3 coordinatesystem is body-fixed to the upper arm segment, the c1, c2, c3 system to the forearm segment, and the
TABLE 7.4 Kinematics Table for the Single Elastic Body Pendulum
TABLE 7.5 The Absolute Velocity of Point B as Expressed Relative to a1, a2, a3
7.5.3 Biodynamically Modeling the Upper or Lower Extremity by the Table Method
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
BIODYNAMICS: A LAGRANGIAN APPROACH

7.22 MECHANICS OF THE HUMAN BODY
d1, d2, d3 system to the hand segment. Tables 7.6, 7.7, and 7.8 are the results for the velocities at theelbow (point C), wrist (point D), and metacarpophalangeal joint of the third digit (point E),respectively. The results from these tables will yield the velocities at the end points of each segmentconsidered. The end point velocities are required in order to determine the velocities at the centers ofgravity for each segment. In Table 7.6, the velocity at the shoulder (point B), vB, is found from Table7.5 by following these steps:
1. Sum the terms to yield the velocity in the a frame.2. Either apply a coordinate transformation between the a and b frames directly, or convert from the a
frame to the inertial frame and then from the inertial frame to the b frame.3. Once the velocity is expressed in the b frame, it may be inserted into Table 7.6.
This process is then repeated for Tables 7.7 and 7.8 to complete the tables with the velocities of pointsC and D, respectively. The derivations of the velocity equations within these tables are lengthy andleft as an exercise for the reader.
To determine the velocity at the center of gravity for each segment, additional tables can besubsequently constructed that correspond respectively to Tables 7.5, 7.6, 7.7, and 7.8. Each new tablemust take into account the position vector that defines the location of Gj for each segment, where jranges from 0 to n - 1 and n is the number of segments considered within the system.
The kinetic energy of the entire system is determined by expanding the expression for the kineticenergy in Eq. (7.4) and is given as
(7.87)
where is a 3 × 3 matrix containing the mass moment of inertia about each axis and, again, j isfrom 0 to n - 1, where n is the number of segments considered within the system. (For this system,0 designates the torso segment, 1 the upper arm segment, 2 the forearm segment, and 3 the handsegment.) Each matrix within the terms must be expressed in the same coordinatesystem. In general, it is practical to select a coordinate system with an axis along the length of a bodysegment (e.g., upper arm, or forearm). This is demonstrated by the use of the b, c, and d frames inthe figures. A transformation may be performed on the inertia matrix if another coordinate system isdesired.
Euler angles are used in order to define the movement of each segment. More specifically, theangular velocities ωωωωω i of points B, C, D, and E are determined by using a 3-1-2 coordinate transfor-
TABLE 7.6 The Absolute Velocity of Point C as Expressed Relative to b1, b2, b3
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
BIODYNAMICS: A LAGRANGIAN APPROACH

BIODYNAMICS: A LAGRANGIAN APPROACH 7.23
mation, which is otherwise referred to as using Cardan angles (Allard et al., 1997). Thistransformation is commonly used within biodynamics to represent human segment movement and ischosen for its ability to define the movement of three-dimensional joints with limited ranges ofmotion in terms of anatomical movement (flexion/extension, adduction/adduction, and internal/external rotations). For the multisegment systems of Fig. 7.4, 7.5, and 7.6, ωi is determined withinTables 7.5, 7.6, 7.7, and 7.8, assuming that each segment link is that of a ball-and-socket joint, or aglobular or spherical pair. Unlike the revolute joint, the ball-and-socket joint has three axes ofrotation and allows ω i to have components in any direction. This assumption also prompts theintroduction of a new set of symbols, which are somewhat different from the ones used previously,to describe the motion of each segment.
The e1, e2, e3 coordinate system is defined to generalize the discussion of the angular velocityderivations and represents the inertial frame of reference. The 3-1-2 transformation follows an initialrotation about the third axis, e3, by an angle of Ψ1 to yield the coordinate system. Then asecond rotation is performed about the axis by an angle of Ψ2, yielding the system.Finally, a third rotation is performed about the axis by Ψ3 to yield the final body frameof reference. This defines the transformation from the e1, e2, e3 system to the system. Tosupplement the kinematics tables, an expression for the angular velocity vector is defined from thistransformation as
(7.88)
where by nature of the rotations, and e3 and must be defined in terms of the coordinate system. This is typically accomplished by using a figure that demonstrates the rotationsand respective orientations of the coordinate systems. Euler angles and coordinate transformations arediscussed in greater detail in the cited references and are also presented in a slightly different mannerin Chap. 5, “Biomechanics of Human Movement.”
TABLE 7.7 The Absolute Velocity of Point D as Expressed Relative to c1, c2, c3
TABLE 7.8 The Absolute Velocity of Point E as Expressed Relative to d1, d2, d3
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
BIODYNAMICS: A LAGRANGIAN APPROACH

7.24 MECHANICS OF THE HUMAN BODY
The gravitational potential energy of the system, expressed in vector form, is given as
(7.89)
The unit vector j, according to Figs. 7.4, 7.5, and 7.6, is in the inertial coordinate system and isalways directed upward. Taking a dot product between any quantity and this unit vector results in thevertical component of the quantity. As a result of the dot products in both Eqs. (7.87) and (7.89), theresulting kinetic and potential energies are scalar quantities. As before, these quantities can be incor-porated into Lagrange’s equation to determine the equations of motion for the system.
Forces play an integral role in the dynamic behavior of all human mechanics. In terms of humanmovement, forces can be defined as intrinsic or extrinsic. For example, a couple about a particularjoint will involve the intrinsic muscle and frictional forces as well as any extrinsic loads sustained bythe system. If the influence of intrinsic muscle activity within the system is to be considered, thelocation of the insertion points for each muscle must be determined to properly solve the equationsof motion.
Conservative forces due to gravity and elasticity are typically accounted for within the termsdefining the potential energy of the system, while inertial forces are derived from the kinetic energy.Forces due to joint friction, tissue damping, and certain external forces are expressed asnonconservative generalized forces.
In biodynamic systems, motions that occur between anatomical segments of a joint mechanism arenot completely arbitrary (free to move in any manner). They are constrained by the nature of thejoint mechanism. As a result, the structure of the joint, the relative motions the joint permits, and thedistances between successive joints must be understood in order to properly determine the kinematicsof the system.
The Lagrangian approach presented within this section has been limited to unconstrained systemswith appropriately selected generalized coordinates that match the degrees of freedom of the system.For a system where constraints are to be considered, Lagrange multipliers are used with the extendedHamilton’s principle (Baruh, 1999). Each constraint can be defined by a constraint equation and acorresponding constraint force. For any dynamic system, the constraint equations describe thegeometries and/or the kinematics associated with the constraints of the system. For a biodynamic jointsystem, the contact force between the segments linked by the joint would be considered a constraintforce. Constraint forces may also involve restrictions on joint motion due to orientations andinteractions of the soft tissues (e.g., ligamentous, tendonous, and muscular structures) that surroundthe joint.
In cases where equations of motion are desired for deformable bodies, methods such as the extendedHamilton’s principle may be employed. The energy is written for the system and, in addition to theterms used in Lagrange’s equation, strain energy would be included. Application of Hamilton’sprinciple will yield a set of equations of motion in the form of partial differential equations as well asthe corresponding boundary conditions. Derivations and examples can be found in other sources(Baruh, 1999; Benaroya, 1998). Hamilton’s principle employs the calculus of variations, and thereare many texts that will be of benefit (Lanczos, 1970).
7.6 BRIEF DISCUSSION
7.6.1 Forces and Constraints
7.6.2 Hamilton’s Principle
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
BIODYNAMICS: A LAGRANGIAN APPROACH

BIODYNAMICS: A LAGRANGIAN APPROACH 7.25
This chapter is presented as an introduction to the use of the Lagrangian approach to biodynamicallymodel human mechanics. Several important aspects of dynamics are briefly introduced and discussed,and may require a review of the literature for more detailed explanations and additional examples.Assumptions were made within each example to simplify the solution and provide a clear presentationof the material.
Further applications may consider dynamic systems that involve adding two or more viscoelasticor elastic bodies to the single-body pendulum examples. As a result, solutions defining the dynamicbehavior of a multisegment pendulum problem would be determined. Combinations of viscoelasticand elastic segments may also be linked together, but may add to the complexity of the solutionsbecause of the elasticity variations between segments. Other applications may include variouscombinations of spring and dashpot systems, such as a Maxwell model or a Kelvin body, to furtherstudy the effects of viscoelasticity on a dynamic system.
The multisegment extremity model demonstrated the ability to subsequently add segments to abase model and determine the equations of motion with each addition. These models were derivedwith the assumption that the links between segments were revolute joints. Further modifications ofthis example may involve combinations of revolute and ball-and-socket joints to more accuratelymodel an actual biodynamic system. The final example (Tables 7.5, 7.6, 7.7, and 7.8) begins to solvea system that assumes all links to be of a ball-and-socket type. If one those links is assumed to be arevolute joint (e.g., point C, the elbow), then the appropriate angles ψ and angular velocities forthe adjoining segments would be negligible on the basis of the constraints of a revolute joint.
Allard, P., Cappozzo, A., Lundberg, A., and Vaughan, C. L., Three-dimensional Analysis of Human Locomotion, John Wiley andSons, New York, 1997.
Baruh, H., Analytical Dynamics, McGraw-Hill, New York, 1999.
Benaroya, H., Mechanical Vibration: Analysis, Uncertainties, and Control, Prentice Hall, Englewood Cliffs, N. J. 1998.
Harrison, H. R., and Nettleton, T., Advanced Engineering Dynamics, John Wiley and Sons, New York, 1997.
Lanczos, C., The Variational Principles of Mechanics, Dover, New York, 1970.
Meirovitch, L: Methods of Analytical Dynamics, McGraw-Hill, New York, NY, 1970
Moon, F. C., Applied Dynamics with Applications to Multibody and Mechatronic Systems, J. Wiley and Sons, New York, 1998.
Peterson, D. R., “A Method for Quantifying the Biodynamics of Abnormal Distal Upper Extremity Function: Application toComputer Keyboard Typing,” Ph.D. Dissertation, University of Connecticut, 1999.
Wells, D. A., Theory and Problems of Lagrangian Dynamics, McGraw-Hill, New York, 1967.
7.7 IN CLOSING
REFERENCES
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
BIODYNAMICS: A LAGRANGIAN APPROACH

Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)Copyright © 2004 The McGraw-Hill Companies. All rights reserved.
Any use is subject to the Terms of Use as given at the website.
BIODYNAMICS: A LAGRANGIAN APPROACH