
Chapter 3 Real-Time Communications in WorldFIPpeople.cs.pitt.edu/~mhanna/Master/ch3.pdf57 Chapter 3...
25
57 Chapter 3 Real-Time Communications in WorldFIP 3.1. Introduction to FIP Real-Time Analyses. In this chapter we will go through the of the real-time analyses results that has been obtained for the WorldFIP fieldbus network protocol, especially, those related to the aperiodic traffic. As we know from chapter one and two of this thesis hat the WorldFIP protocol supports two types of traffic, periodic and sporadic (aperiodic). For the periodic traffic the end-to-end communication deadlines can easily be guaranteed as the BAT of the WorldFIP provides a static schedule for those periodic variables that is based on their deadlines. However, several authors have already deal with this issue, and as an example we introduce the work done by [Kim 98] in which the authors tried to find another way to make the BAT rather than the HCF/LCM method described in chapter two of this thesis. Also in [Almeida 99], the authors tried to deal with another problem facing the FIP fieldbus, namely the inflexibility of the bus arbitrator table. In other words, each time we want to add a sensor or an actuator it will require an interruption of fieldbus operation. This is done because that the BAT is totally static. So they proposed a new scheduling strategy called “Planning Scheduler”; which is a mix between the fully static scheduler and the full dynamic scheduler. For the aperiodic traffic ,which is our major concern here and will be addressed in chapter four, some previous results for calculating the Worst Case Response Time (WCRT) of the Aperiodic variables can be found in [Vasques 94], [Burns 97], [Fonseca 99], and [Tovar 99]. We will introduce each paper and its contributions to this matter and criticize these contributions. In addition to that we will show the previous work done to the WorldFIP protocol considering it as an Integrated Control and Communication System (ICCS), or what other references called Networked Control System (NCS). We will
-
Upload
nguyenliem -
Category
Documents
-
view
214 -
download
0
Transcript of Chapter 3 Real-Time Communications in WorldFIPpeople.cs.pitt.edu/~mhanna/Master/ch3.pdf57 Chapter 3...
57
Chapter 3 Real-Time Communications in WorldFIP
3.1. Introduction to FIP Real-Time Analyses.
In this chapter we will go through the of the real-time analyses results that has
been obtained for the WorldFIP fieldbus network protocol, especially, those related to
the aperiodic traffic.
As we know from chapter one and two of this thesis hat the WorldFIP protocol
supports two types of traffic, periodic and sporadic (aperiodic). For the periodic traffic
the end-to-end communication deadlines can easily be guaranteed as the BAT of the
WorldFIP provides a static schedule for those periodic variables that is based on their
deadlines. However, several authors have already deal with this issue, and as an
example we introduce the work done by [Kim 98] in which the authors tried to find
another way to make the BAT rather than the HCF/LCM method described in chapter
two of this thesis. Also in [Almeida 99], the authors tried to deal with another problem
facing the FIP fieldbus, namely the inflexibility of the bus arbitrator table. In other
words, each time we want to add a sensor or an actuator it will require an interruption
of fieldbus operation. This is done because that the BAT is totally static. So they
proposed a new scheduling strategy called “Planning Scheduler”; which is a mix
between the fully static scheduler and the full dynamic scheduler.
For the aperiodic traffic ,which is our major concern here and will be
addressed in chapter four, some previous results for calculating the Worst Case
Response Time (WCRT) of the Aperiodic variables can be found in [Vasques 94],
[Burns 97], [Fonseca 99], and [Tovar 99]. We will introduce each paper and its
contributions to this matter and criticize these contributions.
In addition to that we will show the previous work done to the WorldFIP
protocol considering it as an Integrated Control and Communication System (ICCS),
or what other references called Networked Control System (NCS). We will

58
demonstrate some other papers that were focused on other important real-time issues.
For example, the performance metrics of the several closed-loops control systems that
are attached to the WorldFIP Fieldbus network. This subject was addressed mainly by
[Halevi 88], [Hong 95], [Walsh 2001], and [Zhang 2001].
Another important real-time aspect that we referred to it in this chapter is the
clock synchronization of the WorldFIP. This aspect was considered by [Kim 98].
Finally, there is one Real-Time topic that we will comment on it at the end of this
chapter, which is deriving task attributes of the FIP-based Real-Time system [Ryu 96]
[Saksena 96] [Hong 96].
3.2. Changing the FIP Scheduling Method Statically.
In [Kim 98] the authors claimed that the HCF/LCM method (which we will
use in this thesis) in constructing the BAT does not support all the scheduling
constraints. These constraints are:
• Memory Size.
• Network Utilization.
• Communications Jitter.
So the authors described three new ways to build the BAT (statically) to meet
each constraint alone.
3.2.1. The Memory-Reduction Scheduling Method.
The first scheduling method that was proposed in [Kim 98] is “the memory
size reduction” as they called it. This is a trial to reduce the memory storage that is
needed to store the WorldFIP BAT when it is long, since typically the appliance that
is used to play the BA role has a relatively small memory size. This method based on
the concept of over-transmission, which is to transmit the periodic variable before its
period (deadline) is due. So the BATs become shorter than that of the HCF/LCM
method. Thus it will increase the network (bus) periodic utilization.
59
This method works as follow:
1- The Elementary cycle (microcycle) is equal to the HCF (Highest common
factor) of all the variable periods or another value equal to or less than the
smallest variables periods.
2- The macrocycle will not be calculated by the LCM method as we saw before,
but rather the over-transmission of variables can compensate for the
periodicity.
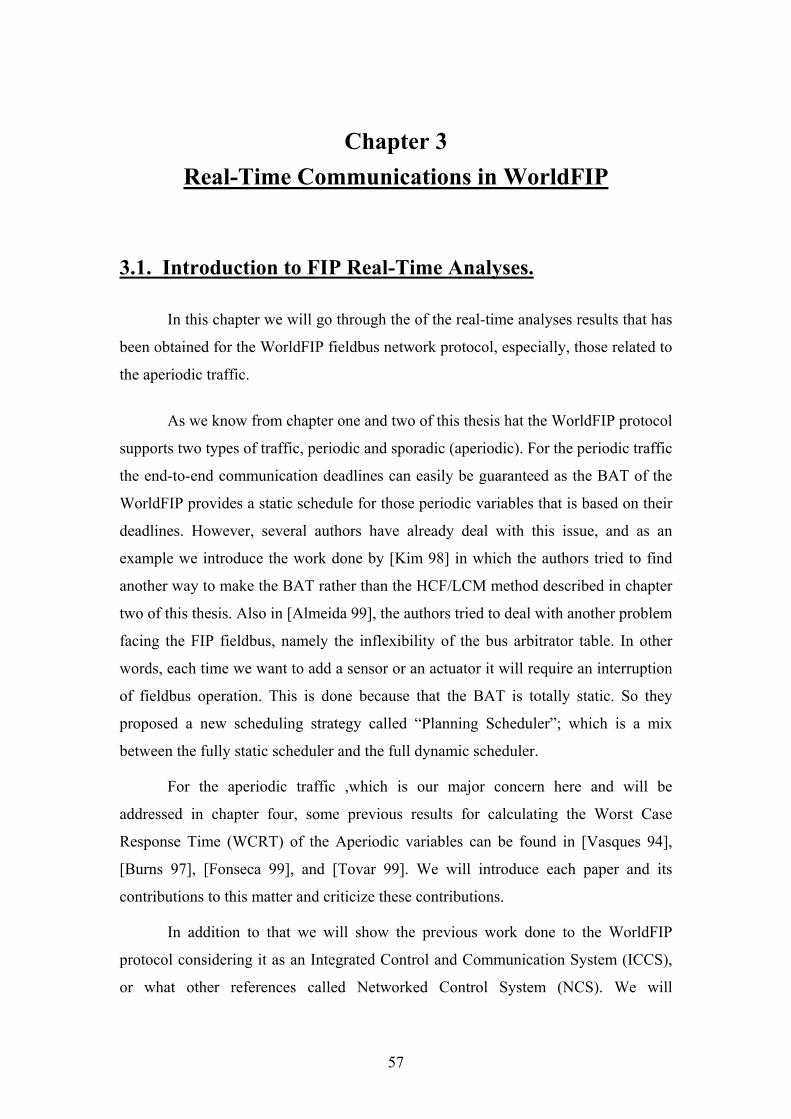
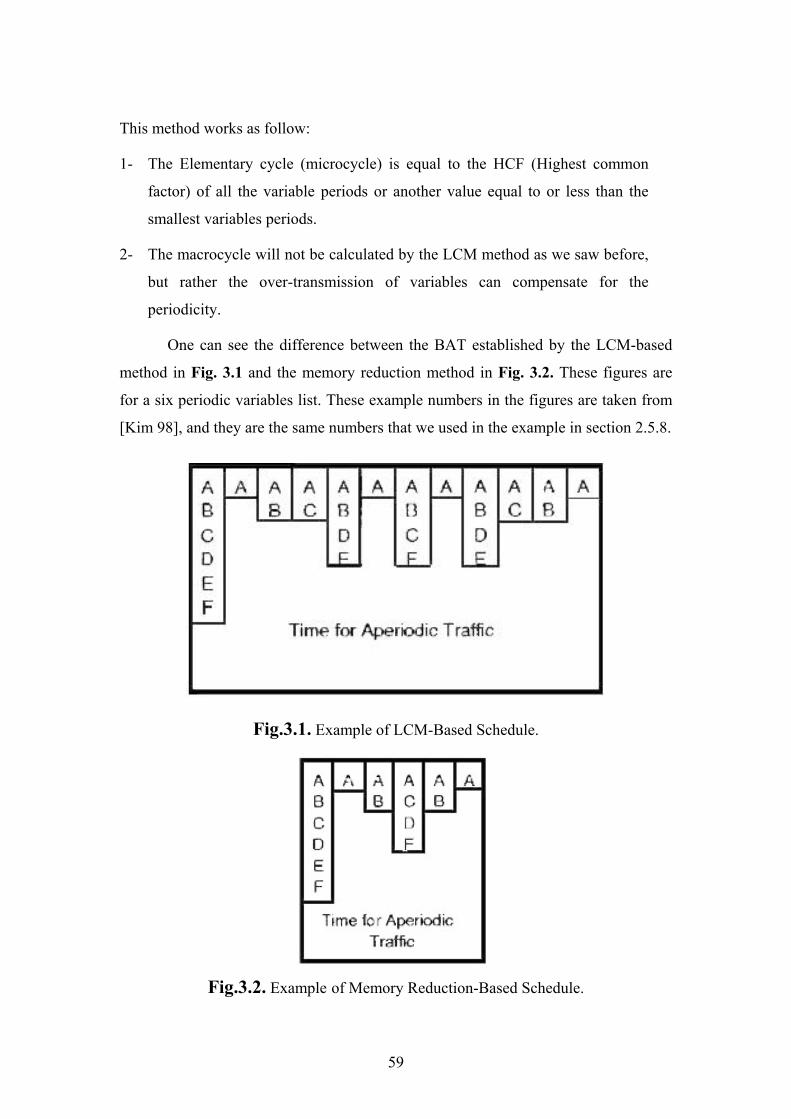
One can see the difference between the BAT established by the LCM-based
method in Fig. 3.1 and the memory reduction method in Fig. 3.2. These figures are
for a six periodic variables list. These example numbers in the figures are taken from
[Kim 98], and they are the same numbers that we used in the example in section 2.5.8.
Fig.3.1. Example of LCM-Based Schedule.
Fig.3.2. Example of Memory Reduction-Based Schedule.
60
The HCF/LCM BAT consists of twelve elementary cycles; each elementary
cycle is of five microseconds time length. The Memory-Reduced BAT consists of six
microcycles only and each microcycle consists of five microseconds as well. As we
see that the new BAT now become shorter than before, which means that they have
succeeded in reducing the amount of memory that is needed to store the BAT. In fact
the authors of [Kim 98] did not ignore this fact.
Also, we can see that this will make the network utilization (for the periodic
variables only) become higher, which means that there is less time available for the
aperiodic traffic. This will lead to longer worst case response time of the aperiodic
variables. What can be also noted about this method is that it can cause severe
communication jitter which in some cases the control applications affected by this
kind of jitter in catastrophic manner as Kim et al. stated in [Kim 98].
Another important drawback of this method is that the authors did not mention
clearly how to evaluate the macrocycle from the periodicities of the periodic
variables. Thus they left this to the trail and error. What is considered as evidence to
this, in [Kim 98] we find two proposed schedules for this method example.
3.2.2. The Jitter-Resolving Scheduling Method.
The second method Kim called it “jitter-resolving method”, in which he tried
to reduce the communication jitter. [Kim 98] stated that in some control applications
the jitter of the control loop input, and/or the jitter of the plant output(s) can have
critical effects on the control system. In this method he modified the periods of the
periodic FIP variables and made these variables harmonic before scheduling these
variables, and then he created the BAT using the ordinary HCF/LCM based method.
This method works as follow:
1- Evaluate the Elementary cycle; which is usually the smallest period of all the
periods of the periodic variables.
61
2- Now we find new values of the periods of the aperiodic variables, such that the
new value is equal to the largest multiple of the elementary cycle and is equal
to or less than the original period of the variables.
3- Construction of the BAT schedule is carried out using the LCM of all the new
periods we got from step two of this algorithm.
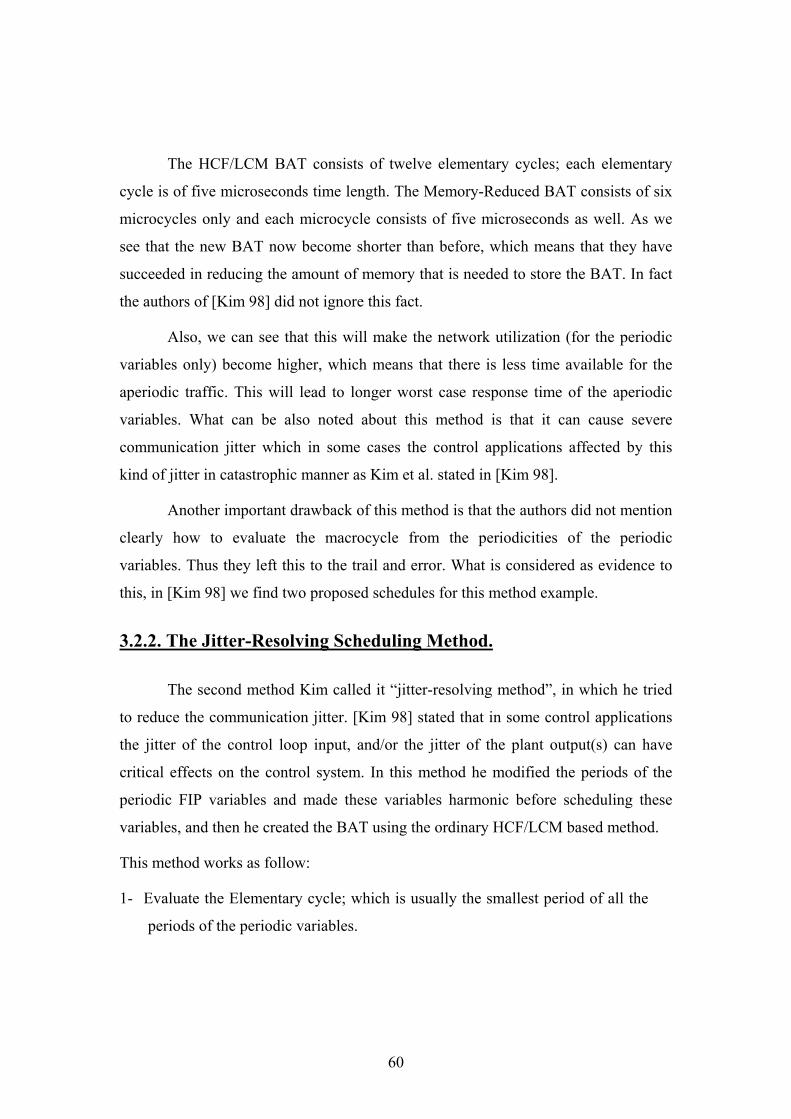
We now can see the resulting the BAT of this jitter-resolving method below in
Fig. 3.3.
Fig.3. 3. Example of Jitter-Resolving-Based Schedule.
There is no communication jitter in this method, because the intervals between
consecutive transmission times of each periodic variable are now equal. Also, it’s
worth noting that this method makes the network utilization very high (concerning the
periodic variables only), which at the end will lead to poor response time of the
aperiodic variables.
What we can see obviously is that the memory size that is required to store the
BAT in this method is so small. This means that this method serves both goals; which
are the jitter resolving and the memory reduction, at the same time. What is more
[Kim 98] mentioned that the network utilization of this method became higher than
that of the other two ways.
Fig. 3.4. shows a comparison between these three methods based on network
utilization, jitter time, and memory size [Kim 98]. As we can see from this figure, the

62
FIP BAT that was made by the HCF/LCM-based scheduling method is the most
appropriate method when constructing the BAT. Thus the HCF/LCM method is the
optimum method in scheduling the BAT. Why? Because HCF/LCM method has a
small amount of communication jitter, and its utilization is good as it leaves time to
serve the aperiodic traffic (unlike the other methods). The only disadvantage in the
HCF/LCM method is that its BAT is rather long. However since the BA is the most
important node in the network, we conclude that it must be a good computer with a
rather higher amount of memory than those of the ordinary producer/consumer nodes.
We will use the HCF/LCM-based BAT through this thesis (i.e. in both chapter four,
and chapter five).
Fig.3. 4. Performance Comparison between the Three Methods.
Finally we would like to add that these three methods are not the only
modification that done to the FIP's BAT on static bases. In fact there is another
statically modified BAT algorithm that was proposed by Hong in [Hong 95];
however, we will refer to this work mot as a new BAT scheduling scheme; but as it
addressed the stability of the closed loop control systems that are attached along the
FIP's network. For more information please refer to section 3.6. of this same chapter.
63
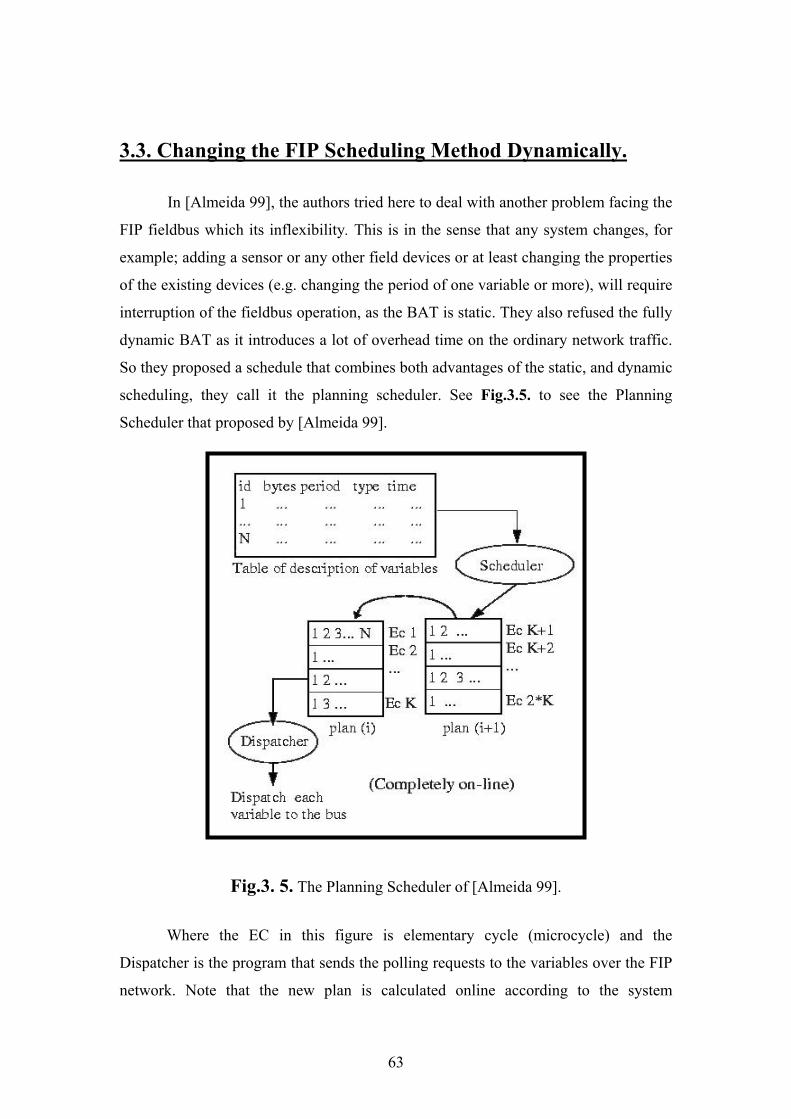
3.3. Changing the FIP Scheduling Method Dynamically.
In [Almeida 99], the authors tried here to deal with another problem facing the
FIP fieldbus which its inflexibility. This is in the sense that any system changes, for
example; adding a sensor or any other field devices or at least changing the properties
of the existing devices (e.g. changing the period of one variable or more), will require
interruption of the fieldbus operation, as the BAT is static. They also refused the fully
dynamic BAT as it introduces a lot of overhead time on the ordinary network traffic.
So they proposed a schedule that combines both advantages of the static, and dynamic
scheduling, they call it the planning scheduler. See Fig.3.5. to see the Planning
Scheduler that proposed by [Almeida 99].
Fig.3. 5. The Planning Scheduler of [Almeida 99].
Where the EC in this figure is elementary cycle (microcycle) and the
Dispatcher is the program that sends the polling requests to the variables over the FIP
network. Note that the new plan is calculated online according to the system
64
parameter change, and not offline. In other words, the new plans (BATs) are not
stored previously. The scheduler is the program (engine) that builds or calculates the
BAT (plan) given the table that describes the periodic variables properties. That table
is not fixed and can be changed. The dispatcher is the program that changes the BAT
construction every time the scheduler changes the plan.
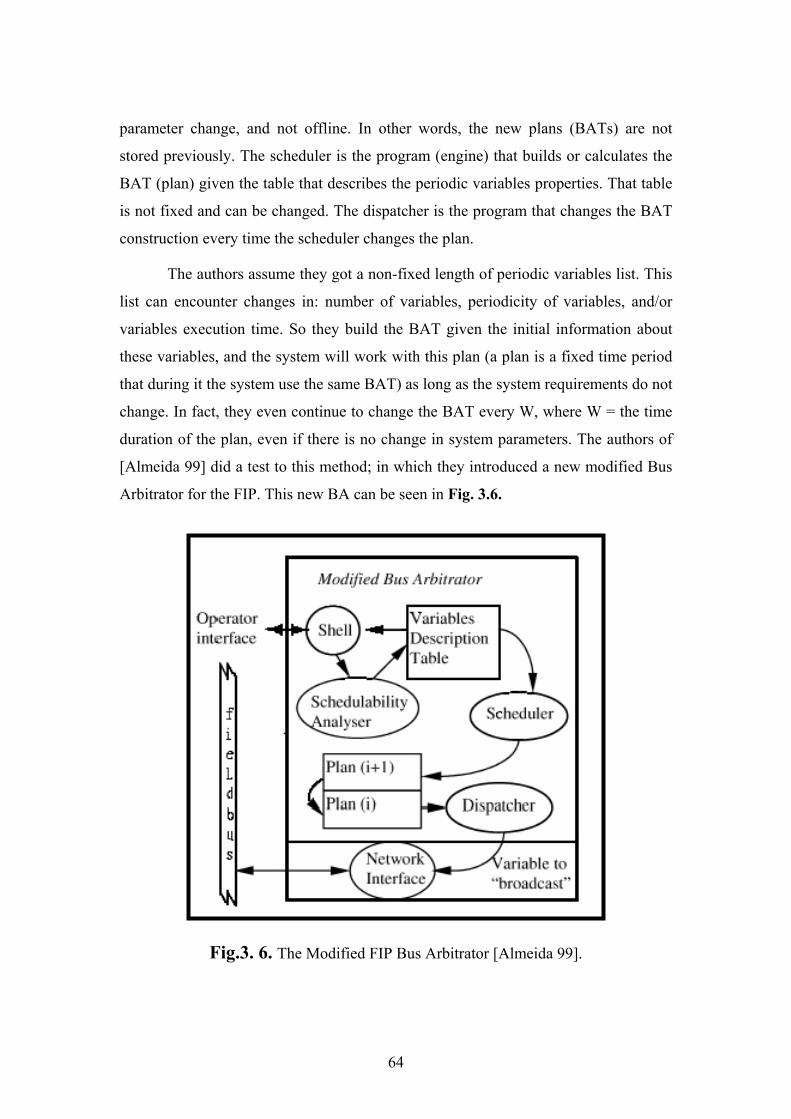
The authors assume they got a non-fixed length of periodic variables list. This
list can encounter changes in: number of variables, periodicity of variables, and/or
variables execution time. So they build the BAT given the initial information about
these variables, and the system will work with this plan (a plan is a fixed time period
that during it the system use the same BAT) as long as the system requirements do not
change. In fact, they even continue to change the BAT every W, where W = the time
duration of the plan, even if there is no change in system parameters. The authors of
[Almeida 99] did a test to this method; in which they introduced a new modified Bus
Arbitrator for the FIP. This new BA can be seen in Fig. 3.6.
Fig.3. 6. The Modified FIP Bus Arbitrator [Almeida 99].
65
The Scheduler Analyzer in the figure is a program that checks the schedule to
see if it will meet the Real-Time constraints or not. The Shell is the operating system
shell interface which the user uses to input the variables parameters into the Variables
Description Table.
Along they derived a sufficient Schedulability condition to overcome the old
inability of dynamic schedulers to guarantee the Schedulability of the variables for a
long system operation. What is more, they introduce a formula to calculate the
complexity of the calculation of the BAT with this new method [Almeida 99].
There are a few remarks that we can mention here about this new scheduling
algorithm. First of all, this new "Planner Scheduler" introduces an overhead to the
network (due to the online process of changing the plan) which induces a delay in the
control applications. This delay may not be accommodated (or compensated) by all
applications. We are fully aware that this delay may be lighter than that of the fully
dynamic scheduler. Second, from our point of view, the tests on this scheduler were
not on a real world factory or at least on a similar experimental setup model like the
one that was done by [Zhang 2001], but instead they tested it using simulation test bed
of three PC's using a cheap, and low bit rate bus.
Now after reviewing the scheduling policies and methods that were proposed
for the FIP protocol, we will now turn into another important Real-Time aspect; that is
calculating the Worst Case Response Time of the FIP aperiodic streams.
66
3.4. Calculating the WCRT of FIP Sporadic Streams.
There are many references that addressed the problem of calculating the Worst
Case Response Time of the aperiodic variables of the WorldFIP's. Examples of these
are [Vasques 94], [Burns 97], [Fonseca 99], [Tovar 99-1], and [Almeida 2002]. We
like to state that the latest paper (i.e. [Almeida 2002]) is simply slightly enhanced
version of [Tovar 99-1], so we will not talk directly about this paper as the main work
was done in [Tovar 99-1]. All these references did their work on one type of the
aperiodic variables; namely the Urgent aperiodic variables.
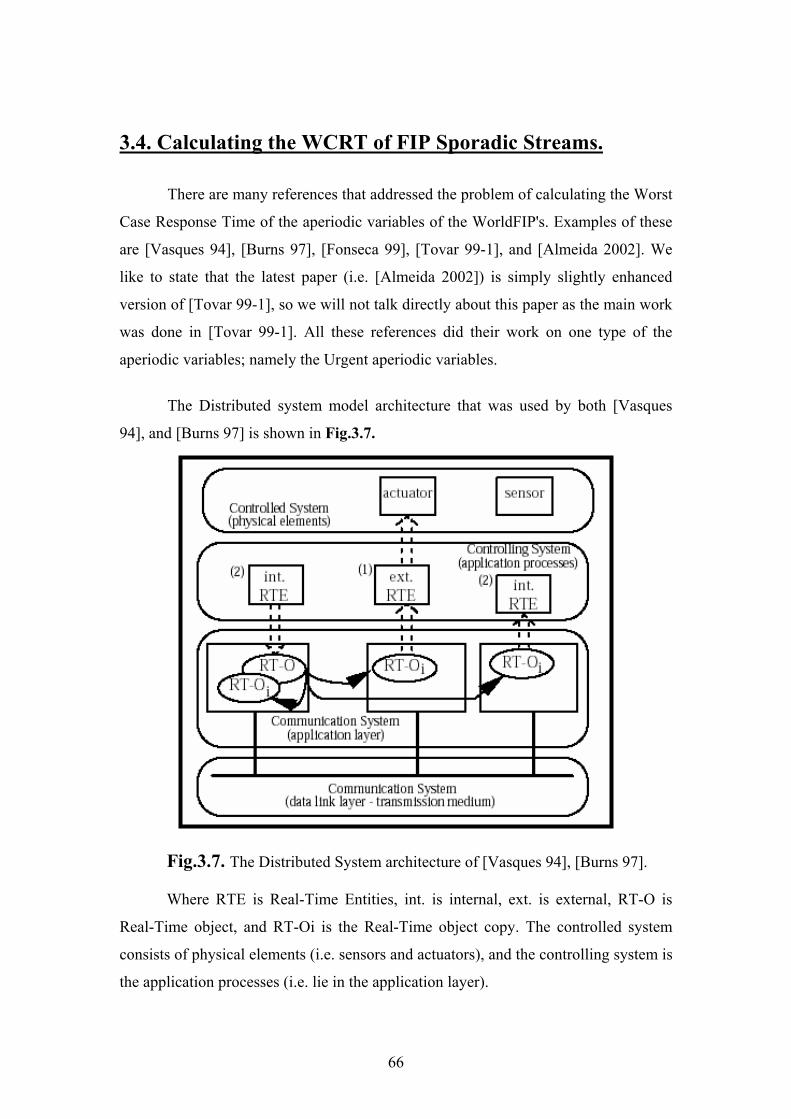
The Distributed system model architecture that was used by both [Vasques
94], and [Burns 97] is shown in Fig.3.7.
Fig.3.7. The Distributed System architecture of [Vasques 94], [Burns 97].
Where RTE is Real-Time Entities, int. is internal, ext. is external, RT-O is
Real-Time object, and RT-Oi is the Real-Time object copy. The controlled system
consists of physical elements (i.e. sensors and actuators), and the controlling system is
the application processes (i.e. lie in the application layer).
67
They assumed that the communication system high-level (in the application
layer) provides the service of transferring the time dependent information produced by
a producer (RT-O) to the different consumers where the copies in the consumer nodes
are called RT-O images: RT-Oi.
What is more, they assumed that the communication system in the lower level
or more precisely the Data Link Layer has to manage the sharing of the transmission
medium for the data packets exchanges. The frame exchanges schedulability is a hard
point, which must satisfy time constraints (resulting from the time constraints in the
higher layers).
In addition to that, they assumed that they had also other causes of information
exchanges between the nodes; such as: alarm occurrences and configuration definition
messages (which do not necessarily have time constraints).
They assumed that the variables streams of the FIP periodic are executed in
the following way:
• During the microcycle first phase, the B.A. induces a predefined sequence of
periodic variables exchange. During this phase, distant stations, if addressed, may
signalize to the B.A. for pending aperiodic variables requests (i.e. implicit
pooling). Explicit pooling is also possible but we will not consider this option1.
• In the following unused microcycle time (if any), the B.A. induces the exchange of
the pending aperiodic variables requests which have been previously made.
Both of [Vasques 94], and [Burns 97] did a pre-run-time schedulability
analysis to obtain the schedulability condition and then they calculated the WCRT of
the aperiodic urgent variables.
The equation that calculated the WCRT of the aperiodic urgent variables that
was given by [Vasques 94] is:
(3.1.)
1 This option can be found in other FIP operation modes and not in the synchronous mode.
ks
1jjMCj
p
1iiMCi TS/TCSTP/T*CPWCRT δ++= ∑∑
==
68
Where the equation that calculated the WCRT of the aperiodic urgent
variables that was given by [Burns 97] is:
(3.2.)
Where TMC is the microcycle length, CPi is the length of the periodic variable
i, δk is the dead time interval length, TPi the period of the periodic variable i, and CSj
is the length of the aperiodic variable j. The number of periodic streams is P, and the
number of the aperiodic streams is S. For equation (3.2.) the σ'PA is the overhead
incurred with both the polling of the nodes that generate aperiodic variables, and
TSMAX is the cyclic phase or window and it is fixed constant.
The authors of [Burns 97] introduced a numerical example to compare
between their equation 3.2. and the equation of [Vasques 94]. Of course the result of
[Burns 97] is more optimistic than that of [Vasques 94].
Both [Vasques 94], and [Burns 97] had some drawbacks that we will
summarize in the following points:
1) They considered equal lengths for periodic windows since they did not take
into account the BAT construction, and so they could not evaluate the actual
length of the periodic window in each microcycle. Thus, the overall results are
also very pessimistic.
2) They did not consider that at the end of each microcycle there will be some
transactions that simply would not fit, and thus would not be schedulable.
3) Finally, they did not also consider the communication jitter in the evaluating
the Dead Time Interval during which the BA remains unaware of the bending
aperiodic request at any node k. Note that within each microcycle the variables
are not scanned exactly in the same "slot", and they may be even scanned at
irregular intervals (not with the same number of microcycles in between),
depending on the methodology used to build the BAT.
PAkSj
jMCkMAXS 'CST/)WCRT(TWCRT
n
σ+δ++σ−= ∑∈∀
69
The analysis that was presented in [Tovar 99-1] improved the previous work
of [Burns 97] considering all of the three above mentioned aspects in an integrated
manner. What is more [Tovar 99-1] presented methodologies for building the
WorldFIP BAT, and thus performing an integrated analysis for both the periodic and
aperiodic traffic. We will leave the details and the assumptions of this model to
chapter 4 of this thesis as it is almost the same model that we adapt in calculating the
WCRT.
But [Tovar 99-1], and later in [Almeida 2002] also had some drawbacks that
we would like to summarize them in the following points:
1- They assume that when a station sends for aperiodic transfer, that there is only
one aperiodic variable; but as we saw from the WorldFIP protocol, the
(RP_RQ) frame can contain a list up to 64 variable identifiers [FIP 98].
2- They did not take into account the queues sizes of the BA (there are two
queues for the Urgent sporadic variables transfer, two for the Normal sporadic
variables transfer, one for the Unacknowledged sporadic message transfer,
and one for the Acknowledged sporadic message transfer).
3- They did not mention how to calculate the maximum number of the urgent
aperiodic variables existing in the FIP network (they call it NA). Even if we
consider that this number is system a parameter that to be known at setup the
time, it still be changed during the operation time. We will see in chapter 4 in
this thesis that there is no need to calculate this number, or even to know its
value. The method that we will introduce is independent of this number.
4- They did not find the WCRT of the Normal sporadic variables or the aperiodic
messages.
At last we would like to mention that the work that was done by [Fonseca 99], the
authors took into account the padding frames, which are used in the FIP network to
maintain synchronization of the microcycles. But the formula they presented was the
same formula that was used by [Burns 97], which we criticized before. We will
propose a new formula to correct all these drawbacks in chapter 4 of this thesis and
verify it using the WorldFIP traffic simulation engine that we developed.
70
3.5. The Stability of FIP Control Loops.
There are many papers that addressed the stability of the fieldbus's associated
control loops that share the same medium [Halevi 88] [Shin 92] [Hong 95] [Zhang
2001] [Walsh 2001]. In these models the sensor/actuator terminal in one control loop
is communicating with the controller terminal via a digital bus or the fieldbus
network. These models can be divided into two main categories; in the first category
the controller node is central for all the control closed loop systems, while in the
second category each control loop has its own controller. We will review each of
these two categories in detail.
In both categories, each terminal suffers from time-variable delays when
accessing the bus. These delays come from two sources; one from other traffic that is
running on the network bus, and the second from the low frequency that most of the
sensors operate on [Halevi 88]. The network induced delay causes degradation in the
performance of the closed-loop system, or may further lead to system instability.
Many solutions were proposed to solve the delay problem. One solution was to find
new values of the sampling times of the control loops attached on the fieldbus that can
compensate for the network delay [Halevi 88] [Hong 95]. Other solutions were
dedicated only towards finding the maximum or the supreme value of this delay that
keeps the closed loop control system stable [Zhang 2001] [Walsh 2001]. We will
review each of these two solutions shortly after in detail. We will call the first
solution: the effect of network delay on control loop stability, and the second solution
determination of sampling periods of the control loops.
3.5.1. Effect of Network Delay on the Control Loop Stability.
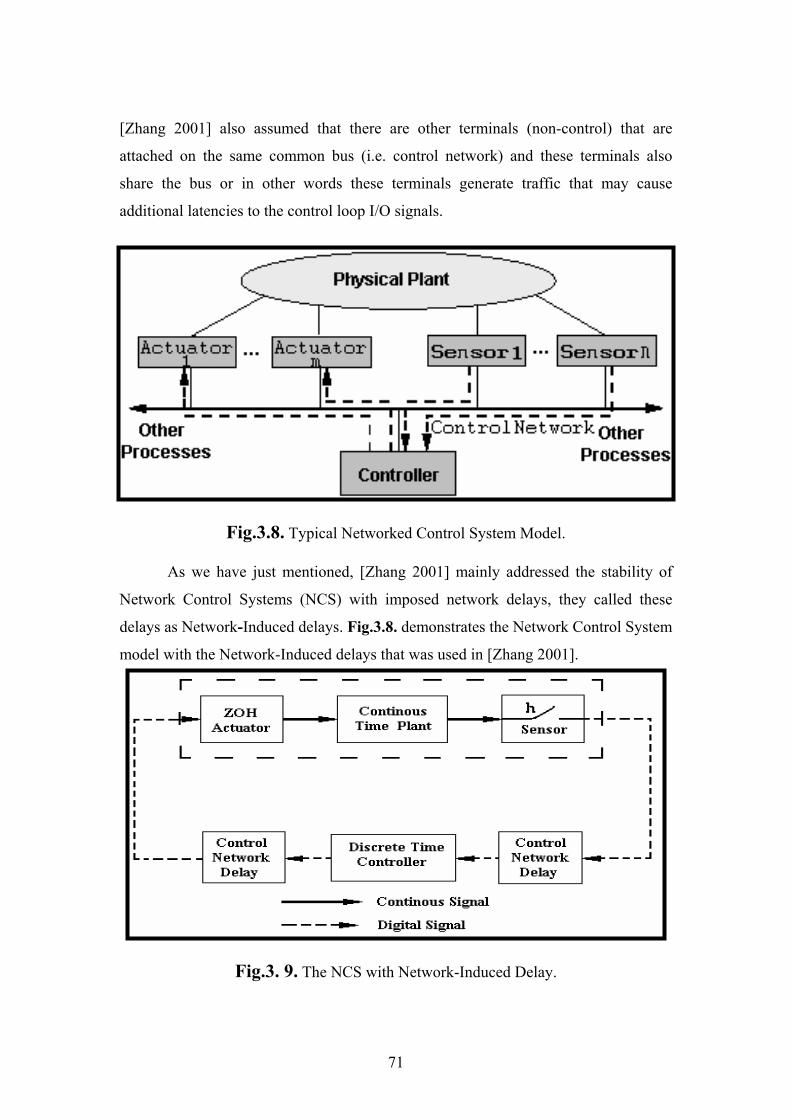
Fig. 3.8. shows the fieldbus system model that Zhang et. al. used in their
paper, also [Walsh 2001] adapted the same model approximately. In this figure the
authors of [Zhang 2001] assumed that there is only one digital controller that is
attached to the fieldbus network, with "m" actuators and "n" sensors. They call this
system as Networked Control System or NCS. These actuators/sensors are attached
via the common bus to that controller, and directly attached to the physical plant.
71
[Zhang 2001] also assumed that there are other terminals (non-control) that are
attached on the same common bus (i.e. control network) and these terminals also
share the bus or in other words these terminals generate traffic that may cause
additional latencies to the control loop I/O signals.
Fig.3.8. Typical Networked Control System Model.
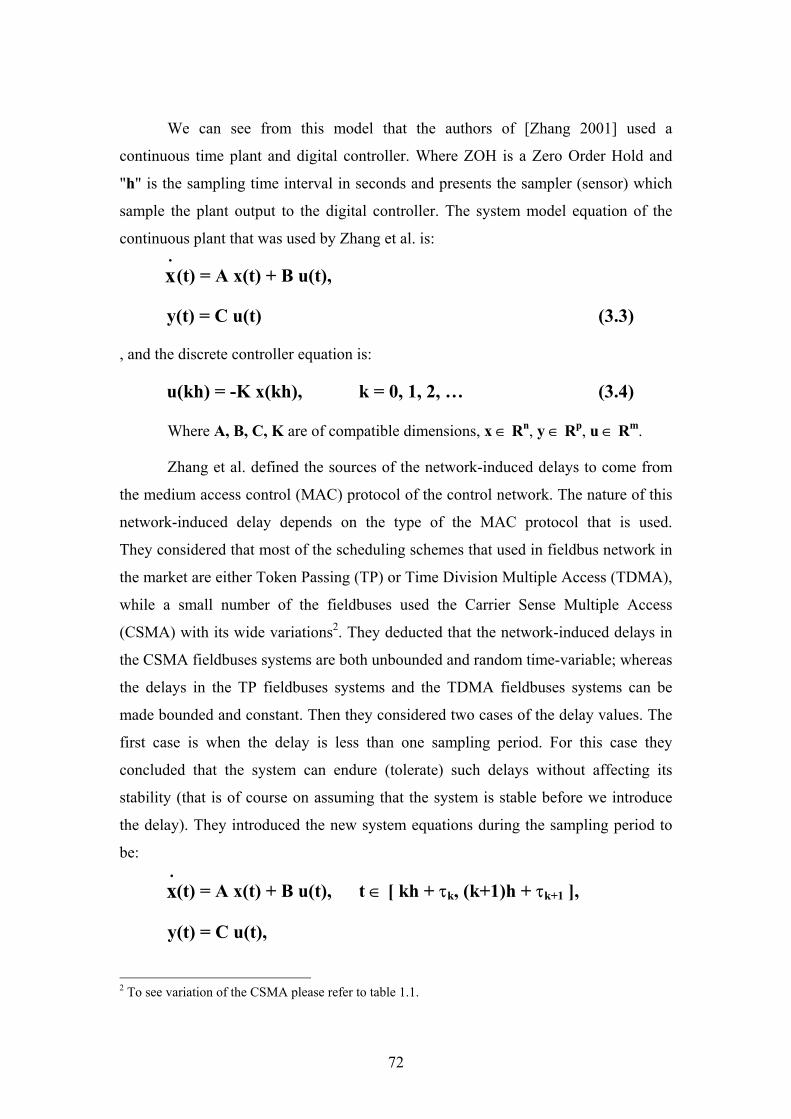
As we have just mentioned, [Zhang 2001] mainly addressed the stability of
Network Control Systems (NCS) with imposed network delays, they called these
delays as Network-Induced delays. Fig.3.8. demonstrates the Network Control System
model with the Network-Induced delays that was used in [Zhang 2001].
Fig.3. 9. The NCS with Network-Induced Delay.
72
We can see from this model that the authors of [Zhang 2001] used a
continuous time plant and digital controller. Where ZOH is a Zero Order Hold and
"h" is the sampling time interval in seconds and presents the sampler (sensor) which
sample the plant output to the digital controller. The system model equation of the
continuous plant that was used by Zhang et al. is:
(t) = A x(t) + B u(t),
y(t) = C u(t) (3.3)
, and the discrete controller equation is:
u(kh) = -K x(kh), k = 0, 1, 2, … (3.4)
Where A, B, C, K are of compatible dimensions, x ∈ Rn, y ∈ Rp, u ∈ Rm.
Zhang et al. defined the sources of the network-induced delays to come from
the medium access control (MAC) protocol of the control network. The nature of this
network-induced delay depends on the type of the MAC protocol that is used.
They considered that most of the scheduling schemes that used in fieldbus network in
the market are either Token Passing (TP) or Time Division Multiple Access (TDMA),
while a small number of the fieldbuses used the Carrier Sense Multiple Access
(CSMA) with its wide variations2. They deducted that the network-induced delays in
the CSMA fieldbuses systems are both unbounded and random time-variable; whereas
the delays in the TP fieldbuses systems and the TDMA fieldbuses systems can be
made bounded and constant. Then they considered two cases of the delay values. The
first case is when the delay is less than one sampling period. For this case they
concluded that the system can endure (tolerate) such delays without affecting its
stability (that is of course on assuming that the system is stable before we introduce
the delay). They introduced the new system equations during the sampling period to
be:
(t) = A x(t) + B u(t), t ∈ [ kh + τk, (k+1)h + τk+1 ],
y(t) = C u(t),
2 To see variation of the CSMA please refer to table 1.1.
.x
.x

73
u(t+) = -K x(t - τk), t ∈ [ kh + τk, k = 0, 1, 2, … ] (3.5)
Now; sampling the system with period "h" the new system equations with
network-induced delay "τ" are:
x((k+1)h) = Φ x(kh) + Γ0 (τk) u(kh) + Γ1(τk) u((k-1)h),
y(kh) = C x(kh) (3.6.)
Where
Φ = eAh
Γ0 (τk) =
Γ1(τk) =
they defined the augmented state vector to be:
z ((k + 1) h) = (k) z(kh) (3.7.)
where
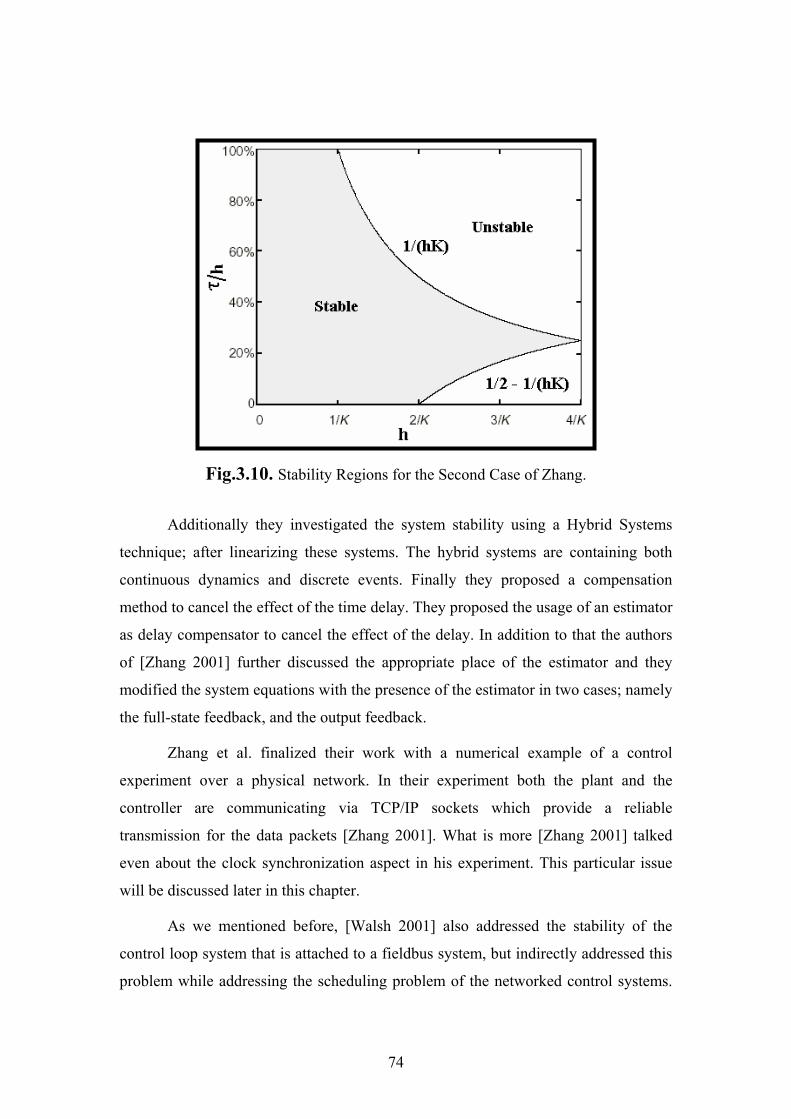
The second case is when the delay is more than one sampling time. For this
case the authors of [Zhang 2001] derived the stability regions for the networked
control system transfer function design for the first order integrator case. They plotted
the stability regions between the system sampling period "h", and the normalized
network-induced delay "τ/h". This can be seen in Fig. 3.10. We shaded the system
stability regions in light gray.
∫τ− kh
0As ,Bdse
∫ τ−hh
Ask
,Bdse
−
τΓτΓ−Φ=Φ
0K)(K)( k1k0~
~Φ
74
Fig.3.10. Stability Regions for the Second Case of Zhang.
Additionally they investigated the system stability using a Hybrid Systems
technique; after linearizing these systems. The hybrid systems are containing both
continuous dynamics and discrete events. Finally they proposed a compensation
method to cancel the effect of the time delay. They proposed the usage of an estimator
as delay compensator to cancel the effect of the delay. In addition to that the authors
of [Zhang 2001] further discussed the appropriate place of the estimator and they
modified the system equations with the presence of the estimator in two cases; namely
the full-state feedback, and the output feedback.
Zhang et al. finalized their work with a numerical example of a control
experiment over a physical network. In their experiment both the plant and the
controller are communicating via TCP/IP sockets which provide a reliable
transmission for the data packets [Zhang 2001]. What is more [Zhang 2001] talked
even about the clock synchronization aspect in his experiment. This particular issue
will be discussed later in this chapter.
As we mentioned before, [Walsh 2001] also addressed the stability of the
control loop system that is attached to a fieldbus system, but indirectly addressed this
problem while addressing the scheduling problem of the networked control systems.
75
Like [Zhang 2001], Walsh et al. also used the same model of one control loop over
the fieldbus network. However, they focused in their study on the famous CAN
fieldbus protocol. Then they studied the effect of the scheduling method over the
closed loop system stability as the scheduling method introduced delays in the
transmission of the signals over the bus. They continued the study to find delay
bounds which they called a "Dynamic Scheduler Error Bound" and "Static Scheduler
Error Bound". At last the authors used these results to derive the stability condition of
the NCS model.
Walsh et. al. also proposed a free of queue fieldbus system (i.e. to make the
fieldbus system without any queues). They called this method as Try Once Discard
(TOD) as the node that has the data packet sample will discard the data if the network
is not available yet and hence, the node which waits for this data will use the old data
packet sample.
At the end, they proposed a stability theory for the NCS with the same model
that was used by [Zhang 2001] and its Equations are (3.3.) and (3.4.). In this theory;
the authors finds a maximum allowable delay that keeps the Networked Control
System globally exponentially stable [Walsh 2001]. [Walsh 2001] verified their work
using two famous examples. The first example is the Batch Reactor Experiment and
sketched the results of its simulation. The other example that they used is the Dryer
Experiment.
As we stated before the authors of [Walsh 2001] used the famous CAN
fieldbus protocol in the data packets transmission over the bus; however, they claimed
that their work can fit with any other fieldbus protocol without the need for further
modification. They stated that their work can be extended further to include many
closed- loop control systems.
3.5.2. Determination of Sampling Periods of The Control Loops.
A different view was taken by both [Hong 95], [Halevi 88], who both used the
results of the variable-time-delay control system stability criteria, that was presented
in [Hirai 80], to find a suitable way to assign values to the sampling times (i.e.
76
periods) of the control system loops attached to the fieldbus. They both divide the
overall delay of the control loop into two components; namely the controller to
actuator delay and the sensor to controller delay. What is more, they did not combine
these two components into one equivalent overall delay. They justified this situation
by concluding that these two delays are different in nature and properties. We would
like to add that the work of [Hong 95] was also inspired by [Shin 92], [Schwartz 88],
and [Ray 88]. Although the authors of [Halevi 88] were interested in finding both the
maximum allowable delay of each control loop and the model that can best describe
the delays associated with the ICCS's, [Hong 95] used the results of [Halevi 88] and
[Hirai 80] to concentrate on finding a scheduling algorithm of the fieldbus to maintain
certain performance metric to all the closed-loops that are attached to the system bus.
This is done while [Hong 95] tried to preserve the maximum utilization of the system
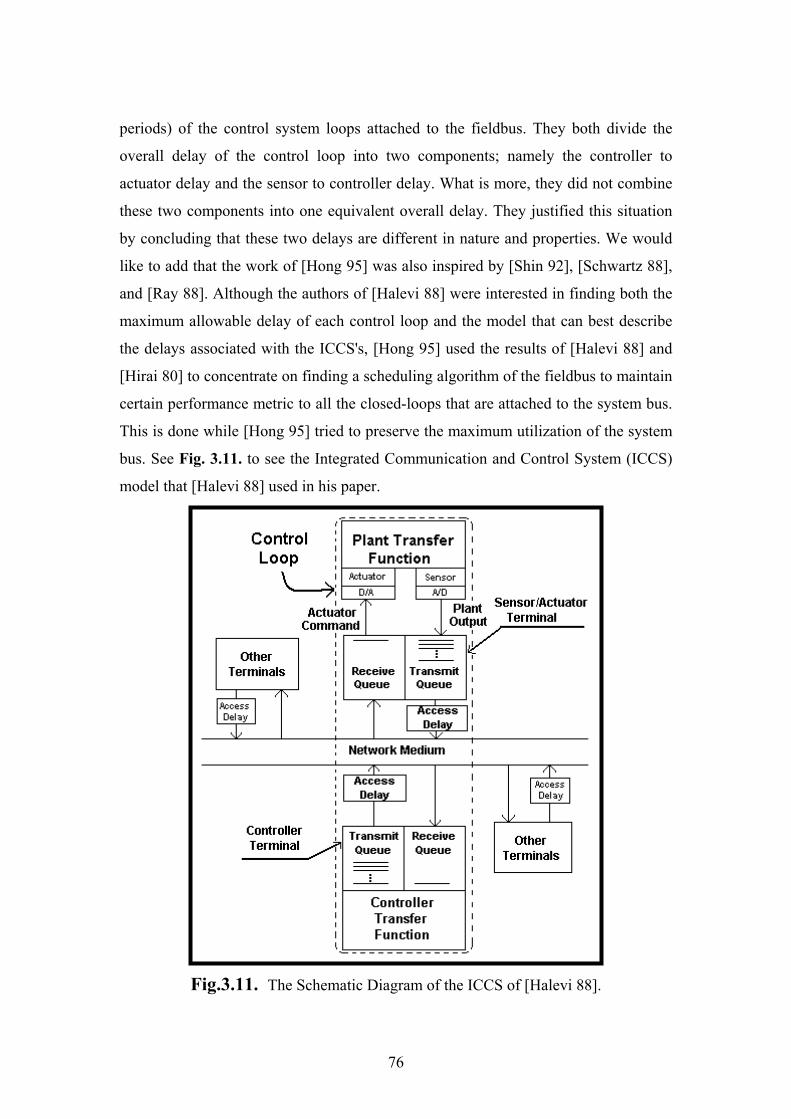
bus. See Fig. 3.11. to see the Integrated Communication and Control System (ICCS)
model that [Halevi 88] used in his paper.
Fig.3.11. The Schematic Diagram of the ICCS of [Halevi 88].
77
What is worth noting in [Hong 95] is that the author did not take into account
the sporadic (aperiodic) traffic of the fieldbus system (neither did [Halevi 88]).
Despite this, the work of [Hong 95] can be applied to the centralized systems like the
FIP protocol with some modifications as we will see later in chapter 5 of this thesis.
As we will see later in chapter five, when Hong did not take into account the
aperiodic traffic plus the overvaluing of the system bus periodic utilization all this
made the worst case response time of the aperiodic traffic extremely high. Of course,
we tried to correct this situation, as the aperiodic WCRT is important to us, by
modifying the scheduling algorithm one more time to free more time for the aperiodic
traffic, while preserving the overall system stability at the same time.
Finally, we used the Matlab Simulink to justify our new algorithm using the
same closed-loop control system example that was used by [Hong 95] with only slight
changes. We would like to state here that the author of [Hong 95] did not mention
how exactly he verified his work, or in other words, what the system properties he
used to justify his work are.

78
3.6. WorldFIP Clock Synchronization.
3.6.1. Why the Clock Synchronization?
Here we would like to introduce another important real-time aspect, which is
the clock synchronization of FIP system. The importance of clock synchronization
came from the need to verify the information validity. WorldFIP provides information
validity via promptness and refreshments statuses (as we saw in chapter 2). So the
setting of these timers, that are the refreshment and promptness timers, is important.
3.6.2. Clock Synchronization from the Application Layer
What is also worth noting for this particular case is that [Kim 98] addressed
the clock synchronization in FIP environment. In fact [Kim 98] proposed a
synchronization mechanism that based on clock mechanism. [Kim 98] argued that the
promptness and refreshment status are not sufficient to guarantee the end-to-end
deadline of the periodic variables by themselves. So Kim et. al. in [Kim 98] demanded
that the synchronization between the application processes and the network should be
well established in order to guarantee the validity of information.
In his proposed method [Kim 98] set the phase of certain process (PHi) to
equal to the maximum periodic information transmission time among all the
microcycles, the refreshment timer value to equal to the deadline of the same process,
and the promptness timer to equal to the deadline of the same process. Where the
deadline itself of this particular process is equal the difference between the period of
transmission of information and the maximum periodic information transmission time
among all the microcycles. In addition, this synchronization is done between the
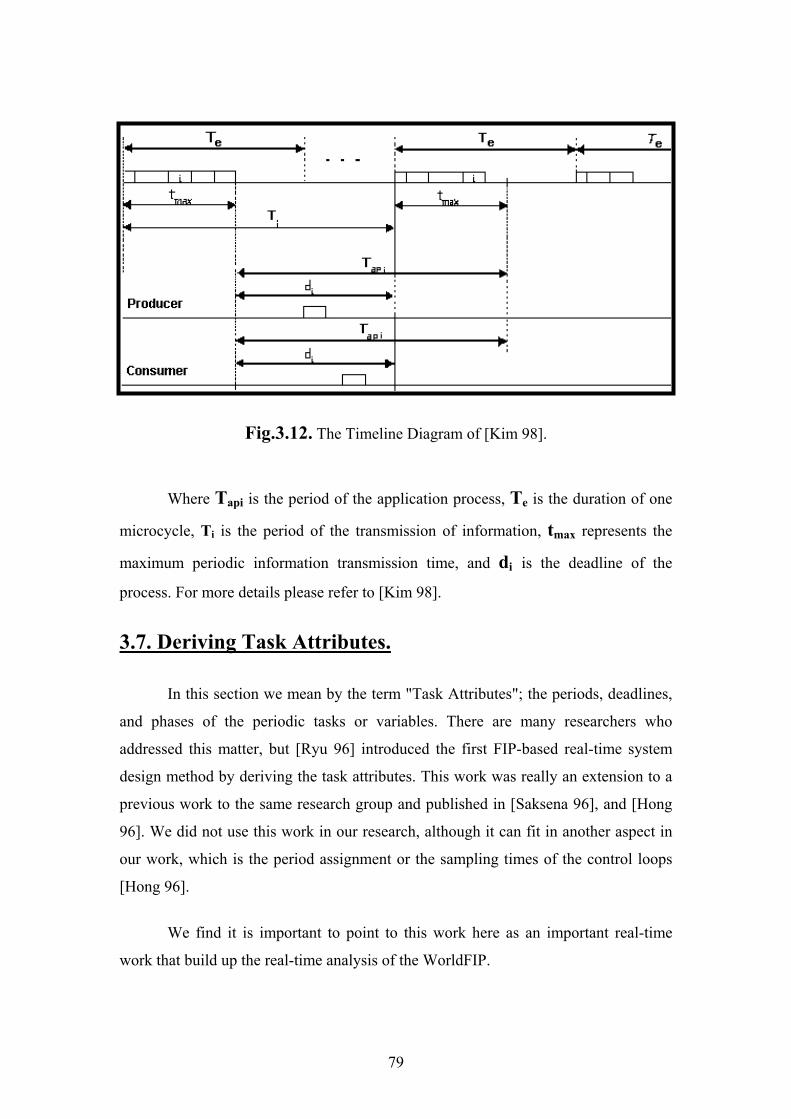
producer node, and the consumer node. Fig. 3.12. shows the time line diagram of this
proposed clock synchronization.
79
Fig.3.12. The Timeline Diagram of [Kim 98].
Where Tapi is the period of the application process, Te is the duration of one
microcycle, Ti is the period of the transmission of information, tmax represents the
maximum periodic information transmission time, and di is the deadline of the
process. For more details please refer to [Kim 98].
3.7. Deriving Task Attributes.
In this section we mean by the term "Task Attributes"; the periods, deadlines,
and phases of the periodic tasks or variables. There are many researchers who
addressed this matter, but [Ryu 96] introduced the first FIP-based real-time system
design method by deriving the task attributes. This work was really an extension to a
previous work to the same research group and published in [Saksena 96], and [Hong
96]. We did not use this work in our research, although it can fit in another aspect in
our work, which is the period assignment or the sampling times of the control loops
[Hong 96].
We find it is important to point to this work here as an important real-time
work that build up the real-time analysis of the WorldFIP.
80
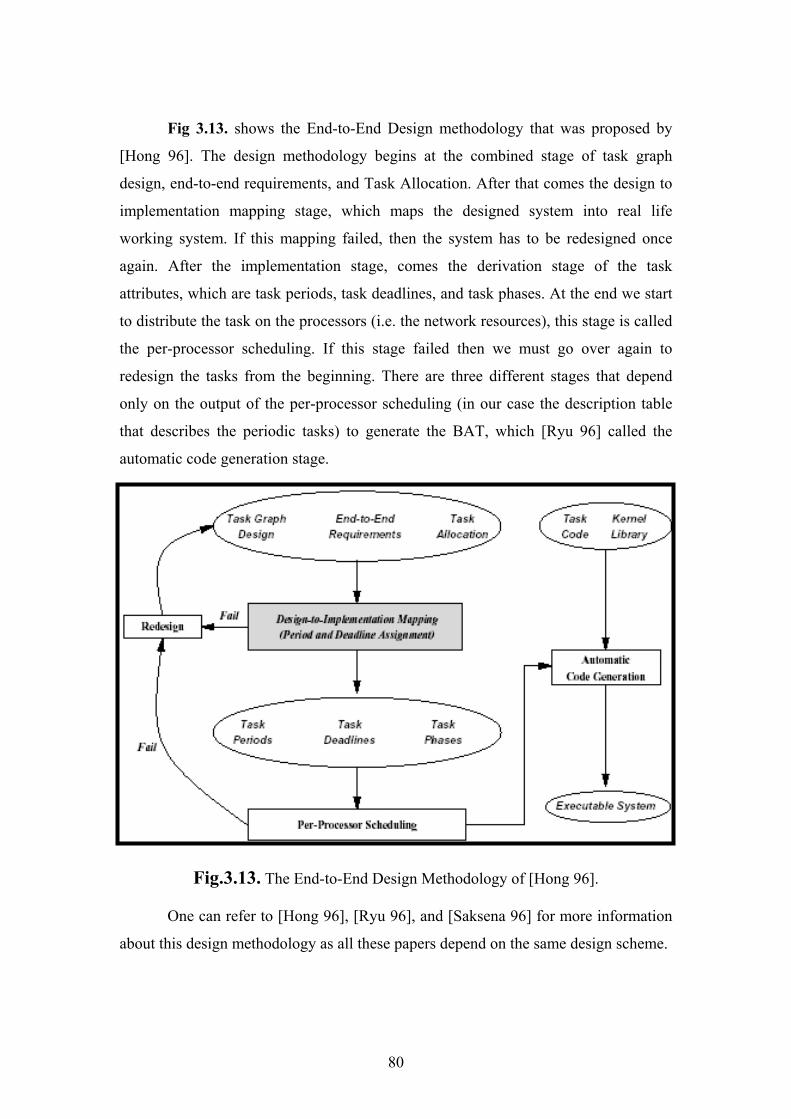
Fig 3.13. shows the End-to-End Design methodology that was proposed by
[Hong 96]. The design methodology begins at the combined stage of task graph
design, end-to-end requirements, and Task Allocation. After that comes the design to
implementation mapping stage, which maps the designed system into real life
working system. If this mapping failed, then the system has to be redesigned once
again. After the implementation stage, comes the derivation stage of the task
attributes, which are task periods, task deadlines, and task phases. At the end we start
to distribute the task on the processors (i.e. the network resources), this stage is called
the per-processor scheduling. If this stage failed then we must go over again to
redesign the tasks from the beginning. There are three different stages that depend
only on the output of the per-processor scheduling (in our case the description table
that describes the periodic tasks) to generate the BAT, which [Ryu 96] called the
automatic code generation stage.
Fig.3.13. The End-to-End Design Methodology of [Hong 96].
One can refer to [Hong 96], [Ryu 96], and [Saksena 96] for more information
about this design methodology as all these papers depend on the same design scheme.
81
The authors of [Ryu 96] mainly addressed the derivation of the timing
constraints of the FIP system. They meant by the timing constraints the period
assignment and the phase/deadline assignment.
They divided the constraints associated to the period assignment into two
major categories, the range constraints, and the harmonicity constraints.
The range constraints are to ensure the minimum rate of task executions. This
leads to impose an upper-bound on the periods. As for the harmonicity constraints, are
arising from synchronous communication between each producer/consumer task pair.
For the phase/deadline assignment he considered two factors, the task response Time,
and the scheduling policy. The task response is the direct metric for the schedulability
of the task. The scheduling policy is responsible for changing the response time of the
task. Finally [Ryu 96] introduced the performance evaluation of his proposed system.


















