三相ブラシレスモータドライブ用IC - Panasonic...製品規格 Page 1 of 48 AN44142A...
49
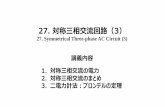
製品規格 Page 1 of 48 AN44142A 三相ブラシレスファンモータ 応用回路例 アプリケーション 特長 概要 三相ブラシレスモータドライブ用IC 電源電圧範囲 : 4.5 V ~ 26.4 V 5 V レギュレータ内蔵 1-Hall-sensor 三相全波正弦波 PWM 駆動方式 VSP 端子 リニア入力 /PWM入力 両入力可能 VSPL端子 リニア入力に対する下限リミット制御 通電位相の自動進角補正機能 正逆回転切換機能 FGパルス数切換機能 Sleep機能 各種保護機能内蔵 (減電圧保護(UVLO)、過電圧保護(OVLO)、過熱保護、拘束保護機能、過電流保護) AN44142A はファンモータ向けの三相ブラシレスモータドライブIC です。 1-Hall-sensor によるロータ位置検出方式と正弦波 PWM 駆動方式により、モータモジュールの省部品・小型化, 低騒音・低振動かつ低消費電力のモータ駆動を実現します。 注 : 上記回路例は量産セットの動作を保証するものではありません。 量産セットを設計する際は、十分に評価・検証を実施した上、 お客様の責任でご使用ください。 TRI H1H H1L FR VSPL VSP BC2 U V RCS W VCC SST FGSEL PS RDS OVS BC1 RD FG SLEEP VREG GND VPUMP C VREG R RCS C BC R VH1 C VCC C VCC1 条件: V CC = 12 V, V FR = 0 V, V VSP = PWMモード(60kHz,Duty60%) AN44142A 3-phase full-wave sine-wave PWM drive VU VV VW IU IV IW time [s] 2ms/div C VPUMP R FG R RD 1 2 3 4 5 6 12 11 10 9 8 7 18 17 16 15 14 13 19 20 21 22 23 24 C FGSEL C SST C TRI ( ) C VSP C H ( ) モーター駆動波形 Doc No. TA4-EA-06251 Revision. 3 Established : 2014-04-01 Revised : 2014-06-20
Transcript of 三相ブラシレスモータドライブ用IC - Panasonic...製品規格 Page 1 of 48 AN44142A...

製品規格
Page 1 of 48
AN44142A
三相ブラシレスファンモータ
応用回路例
アプリケーション
特長
概要
三相ブラシレスモータドライブ用IC
電源電圧範囲 : 4.5 V ~ 26.4 V5 V レギュレータ内蔵
1-Hall-sensor 三相全波正弦波 PWM 駆動方式
VSP 端子 リニア入力 /PWM入力 両入力可能
VSPL端子 リニア入力に対する下限リミット制御
通電位相の自動進角補正機能
正逆回転切換機能
FGパルス数切換機能
Sleep機能
各種保護機能内蔵
(減電圧保護(UVLO)、過電圧保護(OVLO)、過熱保護、拘束保護機能、過電流保護)
AN44142A はファンモータ向けの三相ブラシレスモータドライブIC です。
1-Hall-sensor によるロータ位置検出方式と正弦波 PWM 駆動方式により、モータモジュールの省部品・小型化,
低騒音・低振動かつ低消費電力のモータ駆動を実現します。
注 : 上記回路例は量産セットの動作を保証するものではありません。量産セットを設計する際は、十分に評価・検証を実施した上、お客様の責任でご使用ください。
TRI
H1H
H1L
FR
VSPL
VSP
BC2
U
V
RCS
W
VCC
SS
T
FG
SE
L
PS
RD
S
OV
S
BC
1
RD
FG
SLE
EP
VR
EG
GN
D
VP
UM
P
CVREG
RRCS
CBC
RVH1
CVCC
CVCC1
条件:VCC = 12 V, VFR = 0 V, VVSP = PWMモード(60kHz,Duty60%)
AN44142A 3-phase full-wave sine-wave PWM drive
VU
VV
VW
IU IV IW
time [s] 2ms/div
CVPUMP
RFGRRD
1 2 3 4 5 6
12
11
10
9
8
7
18 17 16 15 14 13
19
20
21
22
23
24
CFGSEL
CSST
CTRI
( )CVSP
CH ( )
モーター駆動波形
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 2 of 48
AN44142A
目 次
特 徴 ……………………………………………………………………… 1
概 要 ……………………………………………………………………… 1
アプリケーション ……………………………………………………………………… 1
応用回路例 ……………………………………………………………………… 1
代表モータ駆動波形 ……………………………………………………………………… 1
目 次 ……………………………………………………………………… 2
絶対 大定格 ……………………………………………………………………… 3
定格消費電力 ……………………………………………………………………… 3
推奨使用条件 ……………………………………………………………………… 4
電気的特性 ……………………………………………………………………… 5
ピン配置 ……………………………………………………………………… 9
端子説明 ……………………………………………………………………… 9
ブロック図 ……………………………………………………………………… 10
機能説明 ……………………………………………………………………… 11
安全動作領域 ……………………………………………………………………… 33
端子等価回路 ……………………………………………………………………… 34
パッケージ情報 ……………………………………………………………………… 41
重要事項 ……………………………………………………………………… 44
使用上の注意事項 ……………………………………………………………………… 46
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 3 of 48
AN44142A
項 目 記 号 定 格 単位 注
電源電圧 VCC 28 V *1
動作周囲温度範囲 Topr – 40 ~ + 95 C *2
保存温度範囲 Tstg – 55 ~ +150 C *2
入力電圧範囲
VVREG – 0.3 ~ 6.0 V *3
VSLEEP,VH1H,VH1L,VFGSEL,
VVSP,VVSPL,VFR,VRDS,VPS,VOVS
– 0.3 ~ 6.0 V —
VTRI ,VSST – 0.3 ~ 6.0 V —
出力電圧範囲
VFG,VRD – 0.3 ~ 6.0 V —
VVREG – 0.3 ~ 6.0 V —
VRCS – 0.3 ~ 6.0 V *4
VBC1 28 V *4
VBC2,Vpump 37 V *4
出力電流範囲
IUdc, IVdc, IWdc 600 mA *5
IUpeak, IVpeak, IWpeak 2200 mA *5, *6
IFG,IRD 5 mA —
IVREG -10 mA —
ESD耐量 HBM (人体モデル) 2 kV —
パッケージ j-a j-c
PD
(Ta=25 C)
PD
(Ta=70 C)
4方向 24ピン プラスチックノーリードパッケージ(QFNタイプ)
56.1 C/W 4.4 C/W 2.22 W 1.42 W
絶対 大定格
静電気放電対策このデバイスは、 ESD(静電破壊)保護機能を内蔵していますが、高エネルギーの静電放電を被った場合
損傷を生じる可能性がありますので、適切な予防処置を行って下さい。
*1 : ガラスエポキシ基板(2層) [50 50 0.8 t](mm) 、裏面放熱板:ダイパッド をはんだ接合 (2層基板放熱ビアあり)。
注: 実使用時、パッケージ情報に記載した許容損失のPD–Ta特性図を参照のうえ、電源電圧、負荷、周囲温度条件に
基づき、許容値を超えないよう十分なマージンを持った熱設計をお願いします。
定格消費電力
注: 上記の絶対 大定格を超えるストレスを与えた場合、本製品に恒久的な損傷を与えることがあります。これはストレスの定格についての規定であり、推奨動作範囲の項目に記載する値以上でのデバイス動作を保証するものではありません。絶対 大定格の状態に長時間置くと、本製品の信頼性に影響を与えることがあります。*1: 定格消費電力を含む絶対 大定格を超えない範囲で使用した場合を示します。*2: 動作周囲温度範囲、保存温度の項目以外はすべて Ta = 25C とします。*3: 本端子とVCC端子を接続した状態でのみ外部より本端子への電圧印加が可能です。
本端子に外部より電圧を加える場合、過度的にも定格値を超えないように設定してください。*4: 本端子には、外部より電圧を加えないでください。過度的にも定格値を超えないように設定してください。*5: 本端子には、外部より電流を加えないでください。過度的にも定格値を超えないように設定してください。*6: 出力電流2200 mAはVCC≧5.6 V、100s以内の時間条件においてのみ許容されます。
VCC<5.6 Vの場合の出力電流は±1500 mA且つ、100s以内の時間条件においてのみ許容されます。
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 4 of 48
AN44142A
推奨動作条件
注: *1: 入力制御電圧の設定範囲に関しては、電気的特性(p.5 ~ p.8)と機能説明(p.11 ~ 32)を参照してください。*2: この値は1例で、量産セットの動作を保証するものではありません。量産セットを設計する際は十分な評価、検証を
実施してください。*3: VCC端子電圧のリプルを抑えるように設定いただき、十分な評価、検証を実施してください。*4: 記載の値でご使用いただくことを推奨します。*5: ご使用条件に合わせて、設定願います。設定に関しては電気的特性(p.5 ~ p.8)と機能説明(p.11 ~ 32)を参照
してください。*6: この抵抗値より小さい抵抗は使用しないでください。 小値より小さい抵抗値の場合、外部要因(基板の放熱、
配線インピーダンス、etc...)あるいは内部要因(閾値の変化、etc...)に起因する温度破壊を防止するためのラッチ機能が動作する可能性があります。
*7: FGSEL端子をオープンで使用する際は、FGSEL端子に容量を接続してノイズ対策を行い、十分な評価、検証を実施してください。
*8: VSP端子をDC入力で使用する際は、VSP端子に容量を接続することを推奨します。
項 目 記 号 Min. Typ. Max. 単位 注
電源電圧範囲 VCC 4.5 — 26.4 V —
入力電圧範囲
VSLEEP 0 — VVREG V *1
VH1H 0 — VVREG V *1
VH1L 0 — VVREG V *1
VPS 0 — VVREG V *1
VRDS 0 — VVREG V *1
VOVS 0 — VVREG V *1
VFGSEL 0 — VVREG V *1
VVSP 0 — VVREG V *1
VVSPL 0 — VVREG V *1
VFR 0 — VVREG V *1
外付け部品
CVCC 4.7 — — F *2,*3
CVCC1 — 0.1 — F *2,*3
CVREG — 0.1 — F *2,*4
CSST 22p 1800p — F *2,*5
CBC — 0.1 — F *2,*4
CVPUMP — 0.1 — F *2,*4
CTRI 220p 390p 1300p F *2,*5
RRCS 0.15 0.22 — *2,*5,*6
RVH — 1k — *2,*5
CFGSEL — 0.01 — F *2,*7
CVSP — 0.1 — F *2,*8
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 5 of 48
AN44142A
項 目 記 号 条 件許容値
単位 注Min Typ Max
回路電流
VCC 回路電流 ICC1 — 3.0 5.6 9.0 mA —
スリープ時VCC回路電流 ICC3 VSLEEP = H — — 50 A —
レギュレータ部
VREG 電圧 VVREG — 4.7 5 5.3 V —
出力インピーダンス ZVREG IVREG = -10 mA — — 10 —
FG部
FG 出力 Low 電圧 VFGL IFG = 1.0 mA — 0.1 0.3 V —
RD部
RD 出力 Low 電圧 VRDL IRD = 1.0 mA — 0.1 0.3 V —
パワー部
オン抵抗 RONHL I = 400 mA 0.5 1.0 1.5 —
オン抵抗 (Vcc=4.5V) RONHL
Vcc = 4.5V
I = 400 mA— 1.25 2.05 —
ダイオード順方向電圧 VDI I = 400 mA 0.6 0.8 1 V —
モータロック保護
ロック検出時間 tLOCK1 — 0.35 0.5 0.65 s —
ロック解除時間 tLOCK2 — 3.5 5 6.5 s —
ロック保護比 PRRATIO — 9 10 11 — —
過電流保護部
過電流検出レベル VCL1 — 0.225 0.250 0.275 V —
ホール部
入力ダイナミックレンジ VHALL — 0 —VREG -
2.0VV —
端子流入電流 IHALL — – 2 0 2 A —
H1H-H1L立下り入力オフセット電圧 VHOFS — -6 0 6 mV —
小入力振幅電圧 VHA — 25 — — mV —
ヒステリシス幅 VHHYS — 7.5 10 13 mV —
SLEEP
入力 "L" レベル電圧 VSLL — — — 0.5 V —
入力 "H" レベル電圧 VSLH — 2.5 — — V —
オープン時 端子電圧 VSLZ — — 0 0.3 V —
入力インピーダンス ZSL — 70 100 130 k —
電気的特性VCC = 12.0 V, VVREG = 5.0 V
特に規定のない限り周囲温度は Ta = 25C2C
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 6 of 48
AN44142A
項 目 記 号 条 件許容値
単位 注Min Typ Max
VSP
端子流入電流 IVSP VVSP=5.0V - 15 45 A —
VSP DC入力制御
停止制御VSP入力 VVSPDCL — 0.9 1.0 1.1 V —
大加速VSP入力 VVSPDCH — 3.6 4.0 4.4 V —
VSP PWM入力制御
停止制御VSP入力 VVSPPWML VVREG=VOSC=5.0V 2 3 4 %*1,*2*3
大加速VSP入力 VVSPPWMH VVREG=VOSC=5.0V - 100 - %*1,*2*5
PWM入力時 入力 "L" レベル電圧 VVSPLL VVREG=VOSC=5.0V - - 1.0 V *1,*2
PWM入力時 入力 “H" レベル電圧 VVSPHL VVREG=VOSC=5.0V 2.0 - - V *1,*2
PWM入力周波数範囲 FPWM - 15 - 100 kHz *1,*2
VSPL DC入力制御
VSPL 有効入力電圧範囲 VVSPL — 1.3 - 3.0 V —
端子流入電流 IVSPL VVSPL=5.0V - 5 15 A —
内部発振周波数
内部発振周波数 fOSC — 17.5 25 32.5 MHz —
PWM周波数用 三角波発振器 (TRI端子)
振幅 VTRI — 1.36 1.53 1.70 Vpp —
外付け容量充電電流 ITRI1 VTRI =0.5V -83.5 -64.5 -45.5 A —
外付け容量放電電流 ITRI2 VTRI =2.0V 45.5 64.5 83.5 A —
PWM制御時 TRI端子入力電圧 VTRITH — 2.9 - - V *2
Soft Start 時間用 三角波発振器 (SST端子)
振幅 VSST — 0.75 1.0 1.25 Vpp —
外付け容量充電電流 ISST1 VSST =0.6V -6.0 -4.0 -2.0 A —
外付け容量放電電流 ISST2 VSST =1.6V 2.0 4.0 6.0 A —
Soft Start未使用時
SST端子入力電圧VSSTTH — 2.9 - - V *4
電気的特性 (つづき)VCC = 12.0 V, VVREG = 5.0 V
特に規定のない限り周囲温度は Ta = 25C2C
注: *1: PWM制御時はVSPL端子を必ずGNDに接続してください。*2: PWM制御設定時はTRI端子を必ずVREG端子に接続してください。*3: 停止指令入力時は0%Duty入力(Low入力)を推奨します。*4: Soft Start未使用設定時はSST端子を必ずVREG端子に接続してください。*5: 設計センター値です。
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 7 of 48
AN44142A
項 目 記 号 条 件許容値
単位 注Min Typ Max
FR (3値回路)
入力 "L" レベル電圧 VFRL — — — 0.8 V —
入力 "M" レベル電圧 VFRM — 1.3 — 2.0 V —
入力 "H" レベル電圧 VFRH — 2.5 — — V —
オープン時 端子電圧 VFRZ — 1.4 1.65 1.9 V —
端子流入電流 IINFR VFR = 0 V - 40 - 20 — A —
FGSEL (3値回路)
入力 "L" レベル電圧 VFGSELL — — — 1.0 V —
入力 "H" レベル電圧 VFGSELH — 4.0 — — V *1
オープン時 端子電圧 VFGSELZ — 1.8 2.4 2.8 V *2
端子流入電流 IINFG VFGSEL = 0 V - 40 - 20 — A —
PS(2値回路)
入力 "L" レベル電圧 VPSL — — — 1.0 V —
入力 "H" レベル電圧 VPSH — 4.0 — — V *1
オープン時 端子電圧 VPSZ — — 0.0 0.5 V —
端子流入電流 IINPS VPS = 5.0 V — 5 15 A —
RDS(2値回路)
入力 "L" レベル電圧 VRDSL — — — 1.0 V —
入力 "H" レベル電圧 VRDSH — 4.0 — — V *1
オープン時 端子電圧 VRDSZ — — 0.0 0.5 V —
端子流入電流 IINRDS VRDS = 5.0 V — 5 15 A —
OVS(2値回路)
入力 "L" レベル電圧 VOVSL — — — 1.0 V —
入力 "H" レベル電圧 VOVSH — 4.0 — — V *1
オープン時 端子電圧 VOVSZ — — 0.0 0.5 V —
端子流入電流 IINOVS VOVS = 5.0 V — 5 15 A —
電気的特性 (つづき)VCC = 12.0 V, VVREG = 5.0 V
特に規定のない限り周囲温度は Ta = 25C2C
注: *1: Highレベル設定時は必ずVREG端子に接続してください。*2: FGSEL端子をオープンで使用する際は、FGSEL端子に容量を接続してノイズ対策を行い、十分な評価、検証を
実施してください。
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 8 of 48
AN44142A
項目 記号 条件参考値
単位 注Min Typ Max
熱保護
保護動作温度 TSDON — — 160 — C *1
ヒステリシス幅 TSDHYS — — 25 — C *1
出力部
電流ソース時
出力立上げスルーレートVTRSO — — 300 — V/s *1
電流ソース時
出力立下げスルーレートVTFSO — — 300 — V/s *1
電流シンク時
出力立上げスルーレートVTRSI — — 300 — V/s *1
電流シンク時
出力立下げスルーレートVTFSI — — 300 — V/s *1
PWM周波数用 三角波発振器 (TRI端子)
発振周波数範囲 fTRI — 15 - 100 kHz *2
基準発振周波数 FTRI CTRI = 390 pF — 55.4 — kHz *1
Soft Start時間用 三角波発振器 (SST端子)
基準発振周波数 FSST CSST = 1800 pF — 1.13 — kHz *1
高回転数
小ホール周期 THMIN — — 173 — s *1
減電圧保護部
保護動作電圧 VLVON — — 3.55 — V *1
保護解除電圧 VLVOFF — — 3.75 — V *1
過電圧保護部
保護動作電圧1 VOVON1 VOVS = VREG 15.0 16.0 17.0 V *1
保護動作電圧2 VOVON2 VOVS = 0V 26.4 27.2 28.0 V *1
注: *1: 設計センター値です
*2: 設計検証されていますが、出荷検査は行っていません。
電気的特性 (つづき)VCC = 12.0 V, VVREG = 5.0 V
特に規定のない限り周囲温度は Ta = 25C2C
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 9 of 48
AN44142A
Pin No. 端子名 Type 説明
1 RD 出力 モータ拘束保護出力端子
2 FG 出力 FG 外部出力端子
3 SLEEP 入力 スリープ設定端子
4 VREG 出力 内部基準電圧端子
5 GND Ground GND 端子
6 VPUMP 出力 昇圧回路出力端子
7 VCC 電源 モータ用電源端子
8 W 出力 モータ駆動出力端子W
9 RCS 出力 モータ電流検出端子
10 V 出力 モータ駆動出力端子V
11 U 出力 モータ駆動出力端子U
12 BC2 出力 昇圧用コンデンサ接続端子2
13 BC1 出力 昇圧用コンデンサ接続端子1
14 OVS 入力 過電圧保護閾値切替入力端子
15 RDS 入力 モータ拘束保護制御切替入力端子
16 PS 入力 進角設定入力端子。入力電圧により自動制御と0deg固定の切替可能
17 FGSEL 入力 FG パルス数切替端子
18 SST 入力 / 出力 ソフトスタート用 三角波発振周波数設定 容量接続端子
19 TRI 入力 / 出力 PWM用 三角波発振周波数設定 容量接続端子
20 H1H 入力 ホールアンプ + 入力端子
21 H1L 入力 ホールアンプ 入力端子
22 FR 入力 正逆回転切替 / ショートブレーキ制御入力端子
23 VSPL 入力 DC入力時 速度下限入力端子
24 VSP 入力 速度指令入力端子
ピン配置
端子説明
Top View
19
20
21
22
23
24
TRI
H1H
H1L
FR
VSPL
VSP
12
11
10
9
8
7
18 17 16 15 14 13
1 2 3 4 5 6
BC2
U
V
RCS
W
VCC
SS
T
FG
SE
L
PS
RD
S
OV
S
BC
1
RD
FG
SLE
EP
VR
EG
GN
D
VP
UM
P
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 10 of 48
AN44142A
ブロック図
BC2BC1VREG
FG
VPUMP
RD
H1H
H1L
U
V
W
VCC
RCS
FGSEL
612134
21
1
2
17
22FR
7
8
10
11
9
GND
5
TRI
VSP
OVS
14
19
PS16
20
24
5V Reg.
SST
18
SLEEP
3
Pre
driv
e
Div.
Charge pump
VCC
UVLO
OV
Osc.Div.
TSD
注 : ブロック図は、機能を説明するため,一部省略、簡素化している場合があります。
RDS15
Logic-Hall-1sensor
PWM Drive-Reverse/Forward-Lock Protect-Sleep
VSPL23 TRI
SS
T
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 11 of 48
AN44142A
機能説明 注 : 下記に示す特性は設計された値であり、保証するものではありません。
VSP端子への入力制御はPWM入力制御とDC入力制御の2通りがあります。PWM入力制御を行う場合は、必ずTRI端子をVREG端子に接続して使用して下さい。VSPL端子はオープンかGND端子に接続してください(GND端子に接続することを推奨します)。
1. VSP入力仕様
1-1. PWM入力モード
PWM入力制御信号の検出
VSP端子へのPWMによる指令入力は下記のように、周期信号TとDuty信号t/Tを検出しています。周期信号Tは出力PWM周波数、Duty信号t/Tは加速指令値に反映されます。
VSP入力
(PWM入力モード)周期T検出 → U,V,W相の出力PWM周波数
Duty t/T検出 → 平均出力電圧の波高値
周期T
High期間 t
Typ 25[MHz] (40ns) で検出
時間
VREG
TRI
VSPL
GND
AN44142APWM入力
VSP
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 12 of 48
AN44142A
1. VSP入力仕様(つづき)
1-1. PWM入力モード
VSP=100%未満入力時の 大パルス幅
PWM入力モード時のVSP入力の分解能はtyp 25MHz(40ns周期)です。そのため、40ns以下の入力パルスについては、検出できない場合があります。特に100%duty付近の入力では周期T信号が正常に検出できない恐れがあります。正常に信号を検出するために、VSP端子入力のLow期間の入力は 低でも500ns以上確保してください。
VSP入力
(PWM入力モード)
Typ 25[MHz] (40ns) で検出Lowを検出
500ns以上のLow幅 を確保してください
PWM入力モードご使用時の注意
停止指令入力時はDuty=0%(Low入力)を推奨します。
VSP入力
(PWM入力モード)停止指令入力 Duty=0%(Low入力)
VSP=100%duty入力時の動作
VSPのPWM入力Dutyを100%未満の状態で出力通電している状態から、VSP入力を100%Dutyに変化させた場合、それまで入力されていた周波数(周期t)を保持して、100%の入力指令を検出します。したがって、出力周波数は1/tとなります。(ただし、指令が100%に切り替わってから、約7t後に出力に反映されます。)
電源投入による起動、SLEEP切り替えによる起動の場合、起動時に既にVSP端子に100%dutyの指令が入力されている場合は、出力周波数は(約58kHz)で動作します。その後、VSP端子にPWM信号が入力されて周波数信号を検出したとき、出力周波数はVSP端子に入力された周波数となります。
PWM入力モード時はVSP端子に必ずPWM信号を入力してください。
機能説明(つづき) 注 : 下記に示す特性は設計された値であり、保証するものではありません。
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 13 of 48
AN44142A
VSP端子への入力制御はPWM入力制御とDC入力制御の2通りがあります。DC入力制御を行う場合は、TRI端子-GND端子間に容量を接続してください。
1. VSP入力仕様(つづき)
1-2. VSP入力モード
DC入力モード時の指令信号DC入力モード時は、TRI端子の三角波とVSP端子入力のDC電圧との比較によりPWM入力信号を生成しています。VSP端子の電圧によって平均出力電圧の波高値、TRI端子の三角波周波数によって出力PWM周波数が決まります。
19AN44142A
CTRI
TRI端子の三角波発振周波数
TRI端子に出力される三角波発振周波数の計算式は下記の通りです。
三角波発振周波数
VTRI : 三角波振幅(typ.時 1.53 V)A : 64.5 A (typ.時)
f TRI CTRI VTRI
A×2 ×
=
VSPL端子による下限リミット制御
DC入力制御を行う場合において、VSPL端子へDC電圧を入力する事によりVSP入力電圧の下限リミット制御が可能です。下限リミット制御を用いない場合、必ずVSPL端子をGND端子に接続して使用してください。
VREG
TRI
AN44142A
VSPDC電圧入力
機能説明(つづき) 注 : 下記に示す特性は設計された値であり、保証するものではありません。
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 14 of 48
AN44142A
2. VSP入力と平均出力電圧このページで使用されている値Typ値です。DC入力モード時はTRIを推奨値で使用した場合の例です。
ホール差電圧HU = H1H-H1L
FG電圧
平均出力電圧
VCC
VCC/2
VCC
VCC/2
AREA② 平均電圧がVCCで歪むため、出力DutyはVSPに非線形依存します・VSP(DC入力モード) ≒ 2.73V ~ 4.0 V・VSP(PWM入力モード) = 58% ~ 100 %
出力DutyはVSPに依存せず固定値です・ VSP(DC入力モード) > 4.3 V・VSP(PWM入力モード) = 100%
AREA① 出力DutyはVSP入力に対して線形依存します・VSP(DC入力モード) ≒ 1.0V ~ 2.73 V・VSP(PWM入力モード) = 3.0% ~ 58 %
VSPに依存して歪む領域が増加する
04.0V100%
AREA②
VSP
平均出力電圧
Hi-Zor
SBRK Active
VSP(DC入力モード)VSP(PWM入力モード)
1.0V3.0%
AREA①
2.73V58%
機能説明(つづき) 注 : 下記に示す特性は設計された値であり、保証するものではありません。
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 15 of 48
AN44142A
3. ホール入力仕様
20
21
以下特性の概略図
J-1 ヒステリシス幅: 10 mV J-2 コンパレータオフセット電圧: ±6 mV
J-3 小入力振幅: 25 mV(min)
ホール差電圧H1H-H1L
ホールコンパレータ出力
J-10
J-2
t [時間]
位相遅れ
H1H
H1L
ホールヒスコンパレータで位置検出を実施しています。正弦波の振幅が小さい場合は、コンパレータ出力の位相遅れが顕著になるため、振幅を大きくして下さい。また、ホールチャタリングが発生した場合にはH1H:20pinとH1L:21pin間に容量を入れて下さい。
通常例 VREG
H1H
H1L
Hall 素子
5V Reg.
Hall素子のバイアス源は,外部にてVREG端子にショートする構成としてください。
位相遅れ無し
J-3
機能説明(つづき)
3-1.ホール信号検出
注 : 下記に示す特性は設計された値であり、保証するものではありません。
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 16 of 48
AN44142A
FGSEL=Highホール1周期に対する
FG信号
ホール電圧
3-2. ホール電圧と FGSEL の関係
FGSELの切替によって、ホールの正弦波1周期/2周期/3周期に対してFG信号を1周期出力します。
3. ホール入力仕様(つづき)
FGSEL=Open(Middle)ホール2 周期に対する
FG信号
FGSEL=Lowホール3 周期に対する
FG信号
機能説明(つづき) 注 : 下記に示す特性は設計された値であり、保証するものではありません。
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 17 of 48
AN44142A
3. ホール入力仕様(つづき)3-3. 進角制御
PS=Lowで自動進角制御します。ホール信号位相に対して、IC自身がモータ電流位相のズレを検知して自動で 適となる位相へ進角します。
ホール差電圧HU = H1H-H1L
U V WW
U VWVU
U V WW
U VWVUモーター相電流
ホール差電圧HU = H1H-H1L
FG電圧
U V WW
U VWVU
U V WW
U VWVUモーター相電流
平均出力電圧VCC/2
ホール信号とモーター電流の位相のズレを補正するように自動で進角
ホール信号と平均出力電圧の位相を固定
PS=Low(自動進角)のとき
PS=High(0deg固定)のとき
平均出力電圧VCC/2
FG電圧
機能説明(つづき) 注 : 下記に示す特性は設計された値であり、保証するものではありません。
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 18 of 48
AN44142A
3-4 ホール素子の取り付け位置
本ICは1個のホール素子を使用します。ホール素子は3センサ方式モータにおけるU相用センサに相当する位置に配置してください。
下記に2極3スロットのモータでのホール素子の配置例を示します。
3. ホール入力仕様(つづき)
機能説明(つづき) 注 : 下記に示す特性は設計された値であり、保証するものではありません。
ホール素子の取り付け例
(2極3スロットモータ)
W
V
Uホール素子
120°
60°
N
S
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 19 of 48
AN44142A
4. 起動と停止
VREG
VSP
制御状態
VCC
Hi-Z正弦波通電
起動モード通電
SLEEP
UVLO解除(3.75V)
Low
回路初期化約2ms
モータ速度
Vcc端子電圧の立ち上げによる起動
動作可能状態
停止指令入力DC入力モード時 VSP < 1VPWM入力モード時 Duty < 3%
駆動指令入力DC入力モード時 VSP > 1VPWM入力モード時 Duty > 3%
・UVLO解除後、約2ms間は回路初期化動作のため、出力通電は停止します。回路初期化動作中にVSPを駆動指令入力としても、出力通電は行われません。初期化完了後に通電を開始します。
・起動モード通電はホール信号入力の4周期間行われます。起動モード通電中はFG信号が出力されません。
機能説明(つづき) 注 : 下記に示す特性は設計された値であり、保証するものではありません。
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 20 of 48
AN44142A
4. 起動と停止(つづき)
VREG
VSP
VCC
SLEEP SLEEP解除
モータ速度
SLEEP信号による起動
停止指令入力DC入力モード時 VSP < 1VPWM入力モード時 Duty < 3%
駆動指令入力DC入力モード時 VSP > 1VPWM入力モード時 Duty > 3%
・SLEEP解除後、約2ms間は回路初期化動作のため、出力通電は停止します。回路初期化動作中にVSPを駆動指令入力としても、出力通電は行われません。初期化完了後に通電を開始します。
・起動モード通電はホール信号入力の4周期間行われます。起動モード通電中はFG信号が出力されません。
制御状態 Hi-Z正弦波通電
起動モード通電
回路初期化 約2ms
Hi-Z
動作可能状態
機能説明(つづき) 注 : 下記に示す特性は設計された値であり、保証するものではありません。
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 21 of 48
AN44142A
4. 起動と停止(つづき)
起動モード通電
機能説明(つづき) 注 : 下記に示す特性は設計された値であり、保証するものではありません。
U V
W
W
U
V平均出力電圧
ホール信号H1H-H1L
A C
EB
起動モード通電 正弦波通電
起動時の通電は下記フローチャートに従って行われます。
起動モード通電 フローチャート
モータ起動時の波形
起動モード通電時の平均出力電圧についてはp.22参照
D
C C C CC
C C
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 22 of 48
AN44142A
4. 起動と停止(つづき)
起動モード通電(つづき)
機能説明(つづき) 注 : 下記に示す特性は設計された値であり、保証するものではありません。
起動モード通電時の平均出力電圧
正転モード(FR=L)時
-1.5-1
-0.50
0.51
1.5
0 555
V U W
-1.5-1
-0.50
0.51
1.5
0 555
U W V
逆転モード(FR=H)時
[ms]
[ms]
[ms]
[ms]
起動通電開始時及び、ホールゼロクロス検出時に、H1H-H1Lの状態によって下記のような通電を行います。
-1.5-1
-0.50
0.51
1.5
0 555
W U V
H1H-H1L>0のとき
H1H-H1L<0のとき
H1H-H1L>0のとき
1.8Hz
1.8Hz
1.8Hz
1.8Hz
平均
出力
電圧
-1.5-1
-0.50
0.51
1.5
0 555
V W U
平均
出力
電圧
平均
出力
電圧
平均
出力
電圧
・起動時はロータの初期位置によって、起動トルクが多少異なります。特にイナーシャの大きなモータについては、十分な起動電流を確保いただきますよう、ご評価・検討をお願いします。
H1H-H1L<0のとき
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 23 of 48
AN44142A
停止
4. 起動と停止(つづき)
VSP
ホール信号周波数
制御状態
停止指令入力駆動指令入力
正弦波通電
7Hz以上 7Hz以下
Hi-Z SBRK
・VSPを停止指令入力とした場合、ホール信号周波数7Hz以上で出力はHi-Z、7Hz以下で出力はSBRKになります。
機能説明(つづき) 注 : 下記に示す特性は設計された値であり、保証するものではありません。
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 24 of 48
AN44142A
5. ソフトスタートとPWM仕様
19
24
SST
VSP
カウントデータを比較して少ない方をdutyとして採用する
有効Duty
SST端子に任意の容量を接続する事で、モード遷移時の起動モード条件でソフトスタート制御を行います。ソフトスタート制御の時間は次頁の関係式で決定されます。また、ソフトスタート制御を行わない場合、SST端子はVREG端子に必ずショートして使用してください。
以下にVSPとSSTのカウントデータ、PWM 有効dutyの関係タイミングチャートを示します。
Time
PW
M 有
効du
ty信
号
0 Time
TRI
PWM Dutyカウンタ回路
SST パルスカウンタ回路
パルス化回路
18
PWM入力
DC入力
PWM化カウントデータ
比較回路
PWM Dutyカウントデータ
SST パルスカウントデータ
カウ
ント
デー
タ
カウントデータを比較して少ない方をdutyに採用
約1 msSST発振回路安定出力の待機時間起動開始
経過時間TPASS [s]
SST有効期間
機能説明(つづき) 注 : 下記に示す特性は設計された値であり、保証するものではありません。
・ソフトスタート機能ご使用についての注意ソフトスタート時間を長くしますと、起動時のモータ電流が緩やかに増加します。そのため、ソフトスタート時間が長すぎる場合は起動トルクが不足して、ロック保護検出時間0.5s(typ)以内にモータが起動できなくなり、ロック保護がかかる場合があります。ご使用の際は、十分な評価・検討をお願いします。
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 25 of 48
AN44142A
( )
5. ソフトスタートとPWM仕様(つづき)
SST有効期間内の経過時間TPASS時点において出力に反映されるPWM 有効dutyは下記の関係式で決定されます。
SST期間が終了となるTPASSは下記の関係式で決定されます。
DC入力時の入力PWM dutyは下記関係式で表されます。
×=
TPWM : 入力PWMの周期 [s]TOSC : 内部発振回路の発振周期 40*10-9 [s]TSST : SST三角波発振周期 [s]TPASS : 経過時間 [s]
PWM dutyTPASS TOSC
TSST TPWM×
×=TPASS TOSC
TSSTTPWM×D
D : 入力PWM duty
= ×D973 VVSP
883
- DC入力時、VVSP=1V~4V
18AN44142A
CSST
SST端子に出力される三角波発振周波数の計算式は下記の通りです。この三角波の周波数とVSP端子入力のPWM周波数の比較によりSoft Start時間を生成しています。
三角波発振周波数
VSST : 三角波振幅(typ.時 1 V)A : SST端子流出、流入電流(typ.時 4 A)
fSST CSST VSST
A×2 ×
=
機能説明(つづき) 注 : 下記に示す特性は設計された値であり、保証するものではありません。
× 0.01
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 26 of 48
AN44142A
6. 正転、逆転とショートブレーキ
ホール電圧と FR (正転/逆転)、モータ電流の関係
正転 (FR = L)
ホール差電圧HU = H1H-H1L
平均出力電圧VCC/2
FG電圧
U V WW
U VWVU
逆転 (FR = H)
W V U W V
U W V U
ホール差電圧HU = H1H-H1L
平均出力電圧VCC/2
FG電圧
FR 切替動作 FR切替は瞬時切替ではありません。一旦停止してから逆回転に再起動します。
FR
ホール周波数
出力状態
VSP
出力通電方向正転 逆転
1.8Hz以下で起動通電開始
7Hz以上 7Hz以下4周期間
正弦波通電 Hi-Z SBRK 起動モード通電 正弦波通電
機能説明(つづき) 注 : 下記に示す特性は設計された値であり、保証するものではありません。
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 27 of 48
AN44142A
6. 正転、逆転とショートブレーキ
ショートブレーキモード
FR=Mとするとショートブレーキモードになります。
FR
出力状態
VSP
正弦波通電
約1ms
SBRK
L M
ショートブレーキによる過大なモーター電流が発生する恐れがあります。絶対 大定格を超えないようにご注意いただき、十分な評価を実施して下さい。
機能説明(つづき) 注 : 下記に示す特性は設計された値であり、保証するものではありません。
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 28 of 48
AN44142A
7. SLEEPモード
モード突入 モータ出力 VREG 電圧 モード解除
SLEEPSLEEP 端子: H
Sleep 端子: L H(即時) 全相 OFF OFF Sleep 端子: H L
消費電力削減機能としてSleepモードがあります。
スリープモードにした場合、VREG電圧がOFFになります。そのため、各保護回路は動作しません。モーター高速回転中にスリープ端子を切替る場合には、モーターの回生電流などで、各端子が絶対 大定格を超えないようにご注意頂き、十分な評価を実施して下さい。
機能説明(つづき) 注 : 下記に示す特性は設計された値であり、保証するものではありません。
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 29 of 48
AN44142A
8. 保護機能
8-1. モータロック保護
ロック検出時間 (0.5 s)(H1H-H1Lの立ち下がりエッジで判定)
ロック解除時間 (5.0 s)
LRD 電圧 Hロック時 H
SBRK
ロック解除信号(Hall (H1H-H1Lの立ち下がりエッジ),VSP,UVLO再投入、SLEEP再投入)でロック解除時間5.0秒より前に解除。
RD 電圧再起動時 H L H
SBRK出力状態
ホール周期(H1H-H1Lの立ち下がりエッジで判定)が0.5 s 以上となった場合 、モータ出力OFF(ショートブレーキ)、RD = Lの保護動作に切り替わり、5 s 後に自動復帰します。Hall入力(H1H-H1Lの立ち下がりエッジ)、VSP再投入、UVLO再投入SLEEP再投入により保護動作は即座に解除します。
出力状態 Active Active
Active Active
RDS=Lの時 (自動復帰モード)
ロック検出時間 (0.5 s)(H1H-H1Lの立ち下がりエッジで判定)
ロック保護状態をラッチLRD 電圧ロック時 H
SBRK
RD 電圧再起動時 H L H
SBRK出力状態
ホール周期(H1H-H1Lの立ち下がりエッジで判定)が0.5 s 以上となった場合、モータ出力OFF(ショートブレーキ)、RD = Lの保護動作に切り替わりラッチします。UVLO再投入SLEEP再投入により保護動作は即座に解除します。
出力状態 Active
Active Active
RDS=Hの時 (ラッチモード)
ロック解除信号(UVLO再投入、SLEEP再投入)で解除。
機能説明(つづき) 注 : 下記に示す特性は設計された値であり、保証するものではありません。
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 30 of 48
AN44142A
8. 保護機能
8-2. 減電圧保護 (UVLO)
VCC
3.55 V
SBRK
UVLO
8-3. 過電圧保護 (OVLO)
VCC
OVLO閾値OVS=L時、27.2 VOVS=H時、16 V
SBRK
OVLO
出力状態
VCC が閾値以上で過電圧保護が動作し、モータ出力はショートブレーキ状態になります。VCC が閾値以下になると保護解除します。
出力状態
任意の条件で
Active
任意の条件で
Active
任意の条件で
Active
任意の条件で
Active
VCC が 3.55 V 以下で減電圧保護が動作し、モータ出力はショートブレーキ状態になります。VCC が 3.75 V 以上になると保護解除します。
3.75 V
機能説明(つづき) 注 : 下記に示す特性は設計された値であり、保証するものではありません。
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 31 of 48
AN44142A
8-5. 過熱保護 (TSD)
VRCS
0.25 V
SBRK
過電流保護
TEMP
160 C
HiZ
過熱保護
135 C
8. 保護機能
8-4. 過電流保護(OCP)
出力状態
出力状態
任意の条件で
Active
任意の条件で
Active
任意の条件で
Active
任意の条件で
Active
RCS電圧が 0.25 V 以上になると過電流保護が動作し,モータ出力はショートブレーキ状態になります。RCS電圧が 0.25 V 以下になると保護解除します。
IC接合温度が 160 C 以上になると過熱保護が動作し、モータ出力はオフします。IC接合温度が 135 C 以下になると保護解除します。
RCS1250.0 VIPEAK
)(250.01.00(A)1)(250.0 Ω VRCS
RCS端子の検出抵抗(RCS)の値により、過電流検出の電流値を設定することができます。
例 : IPEAK = 1.0 Aを設定する場合は,上記計算式より RCS を 0.250 に設定します。
過電流保護 検出電流
機能説明(つづき) 注 : 下記に示す特性は設計された値であり、保証するものではありません。
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 32 of 48
AN44142A
端子No.
端子名 説明端子電圧
備考Open(Low) High
3 SLEEP スリープ設定端子 通常動作 スリープ
SLEEP =“H”:スリープ動作
(モータ出力OFF、VREG出力OFF)
SLEEP =“L”:通常動作
注)SLEEPの設定電圧はp.5の電気的特性(SLEEP)を参考にして下さい。
14 OVS過電圧保護閾値
切替入力端子閾値=27.2V 閾値=16.0V 注) High設定時はVREG端子に接続してください。
15 RDSモータ拘束保護制御
切替入力端子
自動復帰
機能有り
自動復帰
機能無し
RDS =“H”:一定時間経過後の自動復帰機能無しの場合、保護状態の解除はSLEEP=H又は、UVLO動作によってのみ解除されます。
注) High設定時はVREG端子に接続してください。
16 PS 進角設定入力端子自動位相
制御
固定電気角(0deg)制御
注) High設定時はVREG端子に接続してください。注) モーター駆動中に切り替えないでください。
18 SST
ソフトスタート用
三角波発振周波数設定
容量接続端子
-ソフトスタート
制御 無効
ソフトスタート制御を行わない場合は、SST端子を必ずVREG端子に接続して下さい。ソフトスタート制御を行う場合は、SST端子に任意の容量を接続してください。
19 TRI
PWM用
三角波発振周波数設定
容量接続端子
-PWM入力
モード設定
PWM入力による速度制御を行う場合は、TRI端子を必ずVREG端子に接続して下さい。DC入力による速度制御を行う場合は、TRI端子に任意の容量を接続して下さい。
端子No. 端子名 説明
端子電圧
備考Low
Open
(Middle)High
22 FR正逆回転切替/
ショートブレーキ制御入力端子
正転ショート
ブレーキ逆転
任意方向を正とし,反転を逆としています。
ショートブレーキ動作時は3相下側パワートランジスタ=ON。
ショートブレーキによる大電流発生の可能性があります。破壊なきよう十分な見極めをお願いします。
注)FRの設定電圧はp.7の電気的特性(FR)を参考にして下さい。
17 FGSEL FGパルス数切替端子 1/3 1/2 1
ホール周期に対して任意倍のFGパルスを出力します。
注)FGSELの設定電圧はp.7の電気的特性(FGSEL) を参考にして下さい。
9. コントロール端子モード表
機能説明(つづき) 注 : 下記に示す特性は設計された値であり、保証するものではありません。
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 33 of 48
AN44142A
注)下記特性は設計上の参考値であり,保証値ではありません。
本データはTa = 25 C ,単発パルスのデータです。実使用においてはTjの上昇および複数パルスの印加が考えられますので参考データとして御使用いただく事を目的としております。御社に於かれましては、十分な信頼性試験を実施すると共にセット評価をお願いいたします。
安全動作領域
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 34 of 48
AN44142A
端子等価回路
注) 下記特性は設計上の参考値であり,保証値ではありません。
Pin
No.内部回路
インピー
ダンス説 明
1,
2100
Pin1 (RD) は,モータ拘束保護出力端子です。
Pin2 (FG) は,FG 外部出力端子です。
3 100kPin3(SLEEP) は,スリープ設定端子です。
1 VREG
3
2
53kΩ
47kΩ
2kΩ
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 35 of 48
AN44142A
Pin
No.内部回路
インピー
ダンス説 明
4
10(VREG
動作時)
Pin4 (VREG) は,内部基準電圧端子です。
6,
12—
Pin6(VPUMP) は,昇圧回路出力端子です。
Pin12(BC2) は,昇圧用コンデンサ接続端子2です。
端子等価回路(つづき)注) 下記特性は設計上の参考値であり,保証値ではありません。
12 6
4
VCC
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 36 of 48
AN44142A
Pin
No.内部回路
インピー
ダンス説 明
8,
9,
10,
11
—
Pin8 (W), 10 (V), 11 (U)は,モータ駆動出力端子です。
Pin9(RCS)は、
モータ電流検出端子です。
注) 下記特性は設計上の参考値であり,保証値ではありません。
9
8
10
11
VCC
VPUMP
VREG
端子等価回路(つづき)
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 37 of 48
AN44142A
Pin
No.内部回路
インピー
ダンス説 明
13 —
Pin13 (BC1) は,昇圧用コンデンサ接続端子1です。
14 1000kPin14(OVS) は,過電圧保護閾値切替入力端子です。
注) 下記特性は設計上の参考値であり,保証値ではありません。
13
VPUMP
VCC
14
VREG
500kΩ
500kΩ
200kΩ
端子等価回路(つづき)
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 38 of 48
AN44142A
Pin
No.内部回路
インピー
ダンス説 明
15,
161000k
Pin15 (RDS) は,モータ拘束保護制御切替入力端子です。
Pin16(PS) は,進角設定入力端子です。
・Highレベル設定時は必ずVREG端子に接続してください。
17 —
Pin17(FGSEL) は,FGパルス数切替端子です。
・Highレベル設定時は必ずVREG端子に接続してください。
・オープンで使用する際は、FGSEL端子
に容量を接続してノイズ対策を行い、十分な評価、検証を実施してください。
18 —
Pin18 (SST) は,ソフトスタート用 三角波発信周波数設定容量接続端子です。
・Soft Start未使用設定時はSST端子を必ずVREG端子に接続してください。
注) 下記特性は設計上の参考値であり,保証値ではありません。
17
VREG
18
15
VREG
161000kΩ
563kΩ
520kΩ
端子等価回路(つづき)
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 39 of 48
AN44142A
Pin
No.内部回路
インピー
ダンス説 明
19 —
Pin19 (TRI) は,PWM用 三角波発信周波数設定容量接続端子です。
・PWM入力モード設定時はTRI端子を必ずVREG端子に接続してください。
20,
21Hi-Z
Pin20 (N1H) は,ホールアンプ+入力端子です。
Pin21(N1L) は,ホールアンプ-入力端子です。
注) 下記特性は設計上の参考値であり,保証値ではありません。
19
VREG
20 21
端子等価回路(つづき)
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 40 of 48
AN44142A
Pin
No.内部回路
インピー
ダンス説 明
22 504kPin22 (FR) は,正逆回転切換/ショートブレーキ制御入力端子です。
23 1000k
Pin23 (VSPL) は,DC入力時 速度下限入力端子です。
・PWM入力モード設定時もしくは、VSP下限リミッタ機能を使用しないときは、VSPL端子をOPENもしくは、GND端子に接続してください。(GND端子に接続することを推奨します。)
24 330k
Pin24 (VSP) は,速度指令入力端子です。
・PWM入力モード設定時は必ずHighレベルもしくは、Lowレベルの電圧を入力してください。
注) 下記特性は設計上の参考値であり,保証値ではありません。
24
22
VREG
23
VREG
4kΩ
500kΩ
500kΩ
165kΩ
165kΩ
端子等価回路(つづき)
500kΩ
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 41 of 48
AN44142A
単位:mm外形図
パッケージコード:HQFN024-A-0404AZ
リード表面処理:Pdめっき
リード材質:Cu合金
封止材質:Br/Sbフリーエポキシ樹脂
パッケージ情報
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 42 of 48
AN44142A
パッケージ情報 (つづき)
許容損失(技術資料)
パッケージコード: HQFN024-A-0404AZ
2.229
1.438
0.356
標準基板(2層)実装時 放熱ビアあり
[50X50X0.8t(mm)]
放熱板半田付けなし
Rth(j-a) = 86.9 /W
標準基板(2層)実装時 放熱ビアあり
[50X50X0.8t(mm)]
放熱板半田付けあり
Rth(j-a) = 56.1 /W
パッケージ単体Rth(j-a) = 351.2 /W
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 43 of 48
AN44142A
パッケージ情報 (つづき)
許容損失(補足資料)
パッケージ
半導体素子
Rth(j-c)
Rth(c-a)
Rth(j-a)
Ta
Tc
Tj
基板
[各温度と熱抵抗の定義]
Ta :評価対象の周囲の雰囲気(air)温度※発熱体から離れた、対流・放射等の影響をあまり受けない安定した位置の温度
Tc :基板実装面とは反対のパッケージ表面の中心付近温度Tj :半導体素子表面温度Rth(j-c):1Wあたりの半導体素子接合部とパッケ-ジ表面間の熱抵抗Rth(c-a):1Wあたりのパッケ-ジ表面と周囲雰囲気間の熱抵抗Rth(j-a):1Wあたりの半導体接合部と周囲雰囲気間の熱抵抗 Rth(j-c)+Rth(c-a)である
[評価基板情報の補足]
許容損失(技術資料)記載の実装基板仕様の補足情報を以下に示す。
表示 配線層数 基材
ガラスエポキシ 1層 FR-4
2層 2層 FR-4
4層 4層 FR-4
[許容損失(熱抵抗)に関する注意事項]
許容損失(熱抵抗)は、基板の仕様・実装状態や周囲温度など、周囲のさまざま条件により、変動します。(固定値ではありません。)
許容損失(技術資料)は、特定条件(SEMI規格準拠の評価環境)における評価結果であり、周囲条件の変動に伴い、許容損失(熱抵抗)も変動しますので、ご注意ください。
[評価環境について]
許容損失(技術資料)は、SEMI規格準拠の周囲環境における評価結果です。(評価時、周囲温度Taは、25)
[関係式]
Rth(j-c)=Tj-Tc
P
Rth(c-a)=Tc-Ta
P
Rth(j-a)=Tj-Ta
P(/W)
(/W)
(/W)
Tj=Rth(j-c)+Rth(c-a)×P+Ta
=Rth(j-a)×P+Ta
P:消費電力
図1 熱抵抗定義
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 44 of 48
AN44142A
重要事項
1. 機種展開や新たなセットにご使用になる場合は,信頼性を含む安全性確認をセット毎に必ずお客様の責任において実施してください。
2. 本ICを用いた応用システムを設計する際,注意事項を十分確認の上,お客様の責任において行ってください。本文中には説明に対する注意事項および使用上の注意事項がありますので,必ずお読みください。
3. 本ICは一般民生機器用に使用されることを意図しています。特別な品質,信頼性が要求され,その故障や誤動作が直接人命を脅かしたり,人体に危害を及ぼす恐れのある下記のような用途へのご使用をお考えのお客様,および当社が意図した標準用途以外にご使用をお考えのお客様は,事前に当社営業窓口までご相談願います。ご相談なく使用されたことにより発生した損害などについては責任を負いかねますのでご了承ください。
(1) 宇宙機器(人口衛星,ロケット,等)(2) 輸送車両の制御機器( 自動車,航空機,列車,船舶,等)(3) 生命維持を目的とした医療機器(4) 海底中継機器(5) 発電所制御機器(6) 防災・防犯装置(7) 兵器(8) その他: (1)-(7)と同等の信頼性を必要とする用途
4. 本ICは,当社がISO/TS 16949の要求事項を満たしていると特別に指定した製品を除き,自動車用アプリケーションでの使用を意図しておらず,また車載環境において使用されるようには設計されておりません。当社の文書による事前の承諾を得ることなく,本ICを自動車用アプリケーションに使用したことにより,お客様または第三者に損害等が発生した場合,当社は,一切その責任を負いません。
5. 本製品のご使用に際しては,特定の物質の含有・使用を規制するRoHS 指令などの法令を十分調査の上,かかる法令に適合するようご使用ください。お客様が適用される法令を遵守しないことにより生じた損害に関して,当社は一切の責任を負いかねます。
6. ご使用の際は,本ICの向きに注意してください。間違った向きで実装した場合には発煙,発火の恐れがありますので十分に注意してご使用ください。
7. 端子間短絡による破壊を防止するために,パターンレイアウトには十分ご注意ください。なお,本製品の端子配列については端子説明をご参照ください。
8. 半導体デバイスの端子間はんだブリッジなどで破壊することがありますので,電源印加前に十分にプリント基板の確認を行ってください。また,実装後の運搬などではんだ屑などの導電性異物が付着した場合も,同様の破壊が発生する可能性がありますので,実装品質については十分に技術検証をお願いします。
9. 本製品は出力端子 - VCC間ショート(天絡),出力端子 - GND間ショート(地絡),および出力端子間ショート(負荷ショート),ピン間リーク等の異常状態が発生した場合に破壊し,場合によっては発煙する可能性がありますので,十分注意してご使用ください。また,電源の電流能力が高いほど,上記破損,発煙が発生する可能性が高くなりますので,Fuseなどの安全対策を実施されることを推奨します。以下の端子については短絡保護回路が内蔵されておりますが,短絡させた場合,VCC電圧によっては破壊する可能性があります。
Pin11(U),Pin10(V),Pin8(W)
10. 保護回路は,異常動作時に安全性を確保する目的で搭載されています。急激な電圧,電流の変化が端子にかかった場合,所定の保護電圧,電流を超える恐れがありますので、ご使用に際しましては十分な評価を実施してください。
特に温度保護回路については,出力端子 - VCC間ショート(天絡),出力端子 - GND間ショート(地絡)によってデバイスの安全動作領域や 大定格を瞬時に超えるような場合は,温度保護回路が働く前に破壊することがあります。
11. モータコイル,光ピックアップ,トランス等の誘導性負荷を駆動する場合はオン - オフ時に発生する負電圧や過大電圧が印加されないようにしてください。
12. 本製品はASO(安全動作領域)が定められておりますので,ASO内で動作させるように設計し,ICが破壊しないよう,十分な評価を実施してください。
13. 外付け部品の故障によるリスクの検証をお願いします。
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 45 of 48
AN44142A
重要事項(つづき)
14. 本製品の実装時や他の工程などの取り扱いにおける要因(ESD,EOS,端子ストレス,機械的ストレスなど)による本製品の故障や特性変化の防止のため,説明書に従いご使用ください。
15. はんだディップ使用については推奨しておりません。
16. パッケージ裏面の金属板(フィン)をGNDに接続してください。本製品の熱抵抗や電気的特性は,金属板(フィン)がGNDに 接続さ れた条件での保証です。
17. 電源電圧,負荷,周囲温度条件に基づき許容損失を超えないよう十分なマージンをもった熱設計をしてください。
18. 設計に際しては,絶対 大定格,動作保証条件(動作電源電圧, 動作環境等)の範囲内でご使用ください。特に絶対 大定格に対しては,電源投入および遮断時,各種モード切換時などの過渡状態においても,超えることのないよう十分にご検討ください。保証値を超えてご使用された場合,その後に発生した機器の故障,欠陥については当社として責任を負いません。また,保証値内のご使用であっても,半導体製品について通常予測される故障発生率,故障モードをご考慮の上,当社製品の動作が原因でご使用機器が人身事故,火災事故,社会的な損害などを生じさせない冗長設計,延焼対策設計,誤動作防止設計などの システム上の対策を講じていただきますようお願いします。
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 46 of 48
AN44142A
使用上の注意事項
1. VCC には十分インピーダンスの低い電源を与え,IC 直近にバイパスコンデンサを接続してください。
2. RCS端子(Pin 9)の基板パターンは,電流検出抵抗が IC 直近に接続されるよう設計してください。RCS端子から電流検出抵抗までのパターンインピーダンスにより過電流保護設定値が変動することがあります。
3. VCC投入後,VCCが所定の電圧まで上昇する間に,モータ駆動によってVCC電圧が低下してしまう場合,正常に起動 しない恐れがありますので,電源の電流能力について十分な評価・検討をお願いします。
4. ホール信号比較器の 小入力振幅は,使用される温度条件下で,ホール 素子のばらつき,温度特性を含めて,モータ動作に支障がないよう設計願います。
5. 本ICで採用している1センサ方式のモータードライバでは,HALL入力信号の1周期を元に次の周期の通電パターンを生成するため,モーターの加速度が非常に大きい場合,生成した通電パターンの周期とモーターの回転周期に大きな差が生じて,正常に加速できない場合があります。非常に加速度の大きいモーターをご使用の際は,低回転からの急加速について十分な評価・検討をお願いいたします。上記のように加速に問題が生じた場合は,速度指令を一度ゼロ入力とした後,再度速度指令を投入することで改善する可能性が有ります。十分にご評価の上,ご使用いただきますようお願いいたします。(本ICではHALL入力周波数が約10Hz以下の状態で速度指令を一度ゼロ入力とした後,再度速度指令を投入することで,再起動通電を行います。)なお,VSP指令DC入力時におけるVSPL機能をご使用の際は,速度指令をゼロ入力とすることが出来ない為,下限リミット時の回転数設定にご注意いただき,低回転からの急加速について十分な評価・検討をお願いいたします。
6. 高速回転中にSLEEP端子(Pin 3)を Low High とした場合,モータの誘起電圧と通電位相の関係により,過大な電流もしくは
電圧上昇を引き起こしてIC を破損する恐れがありますので,十分な評価・検討をお願いします。
7. ショートブレーキ時は,回転数とモータの特性によってブレーキ電流が決まります。ショートブレーキ前に,モータ電流を減少させ,回転数を落とす等の検討,評価実施をし,見極めをお願いします。ASOデータを参考に,ICが破壊しないよう,十分な評価を実施してください。
8. モータ回転数を高速回転から低速回転へ急激に変化させた場合などに,モータ電流が電源へ還流することで電源電圧が上昇することがあります。十分な評価・検討をお願いします。
9. RCS端子の基板パターンは,電流検出抵抗(RCS)が IC 直近に接続されるよう設計してください。RCS端子から電流検出抵抗(RCS)までのパターンインピーダンスにより過電流保護設定値が変動することがあります。
10. FG端子(Pin 1)および,RD端子(Pin 2)の出力回路形式は,オープンドレインになっています。所定の電源にプルアップ抵抗を接続して,許容端子電圧および電流範囲内でご使用ください。
11. 以下の端子をHighレベルに設定する場合は必ずVREG端子に接続してください。TRI端子(PWM制御時),SST端子(Soft Start未使用時),FGSEL端子,PS端子,RDS端子,OVS端子
12. TRI端子をVREG端子に接続してPWM入力モードで御使用になる場合,VSP端子には必ずHighレベルまたは,Lowレベルの2値信号を入力してください。High,Lowレベル以外の中間電位を入力した場合,予期しない動作を引き起こす恐れが有ります。
13. 起動時はロータの初期位置によって,起動トルクが多少異なります。特にイナーシャの大きなモータについては,十分な起動電流を確保いただきますよう,ご評価・検討をお願いします
14. ソフトスタート時間が長すぎる場合,起動トルクが不足してロック保護検出時間0.5s(typ)以内にモータが起動できなくなり,ロック保護がかかる場合があります。ご使用の際は,十分な評価・検討をお願いします。
15. ご使用の際は,特性の確認を十分に行ってください。外部回路を変更する際は,静特性だけでなく過渡特性も含めて,十分マージンを確保してください。
本ICに関する注意事項
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 47 of 48
AN44142A
使用上の注意事項(つづき)
16. VCC(Pin7)に電源を投入する際は,VCC電圧を1.5 V/s以下の上昇速度で立上げ,また電源を遮断する際は,VCC電圧を -1.5 V/s以上の下降速度で立下げることを推奨いたします。高速での電源立上げ,立下げを実施される場合は,十分な評価・検討をお願いします。
17. VCC - GND間容量の注意本ICはPWM駆動方式を採用しており,出力トランジスターを大電流でスイッチングするため,非常にノイズが発生しやすくなります。そのため,ノイズによりICが誤動作や破壊する可能性があります。そこで,ノイズにより回路が誤動作,破壊しないように電源は十分安定させる必要があります。VCC - GND間の容量は出来る限りIC近傍に配置し,PWMのノイズによりICの誤動作,破壊が発生しないよう十分に配慮してください。
18. モータ基板のパターンについての注意本ICは大電流を流すため,パターンによる共通インピーダンスが無視できません。以下のポイントを踏まえて頂きモータ基板のパターン設計をお願いします。
・ VCCコネクタからICのVCC端子(Pin7)につながる配線は大電流が流れるため,配線のLによってスイッチング時にノイズが発生し易く,誤動作・破壊の原因に成り得ます(下左図)。右図のようにICのVCC近傍からコネクタに対して容量を接続させると,ノイズの逃げ道が確保でき,ICのPIN直のVCC電圧を抑制することができます。可能な限り下右図の設定をお願いします。また,配線のインダクタンスはパターンの長さに比例するので,VCCコネクタからICのVCC端子までの配線は,出来るだけ太く短くなるように設計してください。
・ 電流検出抵抗(RCS)からRCS端子(Pin9)へのラインは非常に重要ですので,可能な限り検出抵抗の根元から独立配線でRCS端子に接続して頂くことを推奨します。RCSがICから離れると,配線インピーダンスにより正確な電流値を検出できません。IC近傍への設置が困難な場合,モータ電流波形,RCS電流波形が,正常であることを確認してください。
・ GNDコネクタからRCS抵抗へのラインとICのGND端子(Pin5)へのラインは別のラインで接続してください。RCSのラインと共通にすると配線インピーダンスにより,ICの接地電圧が揺れ,誤動作の原因になります。また,配線インピーダンスの影響を抑えるため,GND配線は太く短くなるように設計してください。
本ICに関する注意事項(つづき)
ノイズが発生し易い
VCC
GND
L
C
推奨基板
VCC
GND
L
VM-GND間容量によってスパイク振幅小
CIC
RC
S
VC
C
GN
D
IC
RC
S
VC
C
GN
D
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

製品規格
Page 48 of 48
AN44142A
19 .本 IC には5つの保護機能を内蔵しています。下記の事項を確認の上,ご注意ください。
保護機能 動作 / 解除条件 保護動作状態 注意事項
VCC減電圧保護
(UVLO)
• 保護動作VCC : 3.55 V 以下
• 保護解除VCC : 3.75 V 以上
(ショートブレーキ)
パワー上相オフ
パワー下相オン
モータ回転時等にショートブレーキによる大電流発生の可能性があります。
破壊なきよう十分な見極めをお願いします。
VCC過電圧保護
(OVLO)
保護 / 解除動作VCC入力電圧1 : 16.0 V (typ.)
VCC入力電圧2 : 27.2 V (typ.)
(ショートブレーキ)
パワー上相オフ
パワー下相オン
モータ回転時等にショートブレーキによる大電流発生の可能性があります。
破壊なきよう十分な見極めをお願いします。
過電流保護
(OCP)
保護動作
RCSS電圧 : 0.25 V (typ.)以上
保護解除
RCSS電圧 : 0.25 V (typ.)以下
(ショートブレーキ)
パワー上相オフ
パワー下相オン
RCSは電流検出抵抗です。
RCS過電流保護レベルは,基板パターンやノイズの影響によりPeak誤検出する場合があります。
RCSの抵抗値は過電流検出レベル,RCS抵抗のバラツキ,温度等を考慮し,定格を超えないよう十分配慮し,設計してください
モータ拘束保護
• 保護動作
ホール入力周期 : 0.5 s 以上
(H1H-H1Lの立下りエッジで判定)
• 保護解除
RDS端子=L又はOpen の場合,
下記①~⑦のいずれかの条件で保護状態を解除する
①SLEEP=Hが入力される
②UVLO動作(VCC<3.55V)
③5 s 後に自動復帰
④ホール信号が入力される
(H1H-H1Lの立下りエッジ)
⑤VSP(PWM)=3.0%(typ)以下,又はVSP(DC)=1.0V(typ)以下が入力される
⑥FR信号の切替りが入力される
⑦SBRK信号が入力される
• 保護解除禁止制御
RDS端子=Hの場合,上記③~⑦は無効となる
(ショートブレーキ)
パワー上相オフ
パワー下相オン
モータ回転時に保護動作がかかるとブレーキ電流が発生します。
破壊なきよう十分な見極めをお願いします。
過熱保護
保護動作
TJ : 160 C 以上
保護解除
TJ : 135 C 以下
パワー全相オフ
保護動作時,全相オフとなるため,
モータ回転時等に保護動作が オン / オフを繰り返すと逆流電流が発生します。
電源上昇にご注意ください。
本ICに関する注意事項(つづき)
使用上の注意事項(つづき)
Doc No. TA4-EA-06251Revision. 3
Established : 2014-04-01Revised : 2014-06-20

本書に記載の技術情報および半導体のご使用にあたってのお願いと注意事項 (1) 本書に記載の製品および技術情報を輸出または非居住者に提供する場合は、当該国における法令、特に安
全保障輸出管理に関する法令を遵守してください。 (2) 本書に記載の技術情報は、製品の代表特性および応用回路例などを示したものであり、それをもってパナ
ソニック株式会社または他社の知的財産権もしくはその他の権利の許諾を意味するものではありません。したがって、上記技術情報のご使用に起因して第三者所有の権利にかかわる問題が発生した場合、当社はその責任を負うものではありません。
(3) 本書に記載の製品は、一般用途(事務機器、通信機器、計測機器、家電製品など)、もしくは、本書に個別
に記載されている用途に使用されることを意図しております。 特別な品質、信頼性が要求され、その故障や誤動作が直接人命を脅かしたり、人体に危害を及ぼす恐れの
ある用途 - 特定用途(車載機器、航空・宇宙用、輸送機器、交通信号機器、燃焼機器、医療機器、安全装置など)でのご使用を想定される場合は事前に当社営業窓口までご相談の上、使用条件等に関して別途、文書
での取り交わしをお願いします。文書での取り交わしなく使用されたことにより発生した損害などについては、当社は一切の責任を負いません。
(4) 本書に記載の製品および製品仕様は、改良などのために予告なく変更する場合がありますのでご了承くだ
さい。したがって、最終的な設計、ご購入、ご使用に際しましては、事前に最新の製品規格書または仕様書をお求め願い、ご確認ください。
(5) 設計に際しては、絶対最大定格、動作保証条件(動作電源電圧、動作環境等)の範囲内でご使用いただきま
すようお願いいたします。特に絶対最大定格に対しては、電源投入および遮断時、各種モード切替時などの過渡状態においても、超えることのないように十分なご検討をお願いいたします。保証値を超えてご使用された場合、その後に発生した機器の故障、欠陥については当社として責任を負いません。
また、保証値内のご使用であっても、半導体製品について通常予測される故障発生率、故障モードをご考
慮の上、当社製品の動作が原因でご使用機器が人身事故、火災事故、社会的な損害などを生じさせない冗長設計、延焼対策設計、誤動作防止設計などのシステム上の対策を講じていただきますようお願いいたします。
(6) 製品取扱い時、実装時およびお客様の工程内における外的要因(ESD、EOS、熱的ストレス、機械的スト
レス)による故障や特性変動を防止するために、使用上の注意事項の記載内容を守ってご使用ください。分解後や実装基板から取外し後に再実装された製品に対する品質保証は致しません。
また、防湿包装を必要とする製品は、保存期間、開封後の放置時間など、個々の仕様書取り交わしの折に取り決めた条件を守ってご使用ください。
(7) 本書に記載の製品を他社へ許可なく転売され、万が一転売先から何らかの請求を受けた場合、お客様にお
いてその対応をご負担いただきますことをご了承ください。 (8) 本書の一部または全部を当社の文書による承諾なしに、転載または複製することを堅くお断りいたします。
No.010618