Case Study by ANYbotics - ethz.ch
39
PRESENTATION // Building a Legged Robot with ROS Case Study by ANYbotics March 5, 2021 Maximilian Wulf, Harmish Khambhaita
Transcript of Case Study by ANYbotics - ethz.ch

PRESENTATION //
Building a Legged Robot with ROSCase Study by ANYbotics
March 5, 2021
Maximilian Wulf, Harmish Khambhaita

ANYbotics//
Robots Change the Way We WorkROBOTICS REVOLUTION //
3
Let Robots Go Anywhere!
≫ ≫Manufacturing Logistics The New World
Stationary manipulation Mobility in structured environmentsMobile interaction in industrial, urban
and natural environments
1980 2010 2020

ANYbotics//
Safety, Data Quantity and Quality Are the Main Cost Drivers for InspectionTHE CHALLENGE //
4
SAFETY QUALITY
QUANTITY

ANYbotics//
From Research to Industrial ApplicationsROBOT HISTORY //
6
2009ALoF
2012StarlETH
2015ANYmal Alph
2017ANYmal Beth
2018ANYmal B
2019ANYmal C
Maturity, Autonomy, Performance, Robustness
RESEARCH DEMONSTRATOR APPLICATION
2021

ANYbotics//
ANYmal C Legged Robot – The Next Step in Robotic Industrial InspectionVIDEO //
7

ANYbotics//
ANYmal C’s Legs Provide Extreme Mobility in Challenging EnvironmentsEXTREME MOBILITY //
8
SPEED[1 M/S]
OMNI-DIRECTIONAL
SLOPE[20°]
STAIRS[45°]
STEP[35 CM]
OBSTACLE[20 CM]
OVERHANGING[50 CM]
GAP[25 CM]
PASSAGES[60 CM]

ANYbotics//
Fully Autonomous Operation and Seamless Switching to Supervised or Manual Control
OPERATING MODES //
9
Teleoperated Supervised Autonomous

ANYbotics//
All-around Depth Cameras for Obstacle DetectionADVANCED SENSING //
10
360° OBSTACLE DETECTION4x DEPTH CAMERAS

ANYbotics//
360° Environment ScanningADVANCED SENSING //
11
360° OBSTACLE DETECTION4x DEPTH CAMERAS
ENVIRONMENT SCANNINGLIDAR

ANYbotics//
Front and Back Cameras for TeleoperationADVANCED SENSING //
12
360° OBSTACLE DETECTION4x DEPTH CAMERAS
ENVIRONMENT SCANNINGLIDAR
WIDE ANGLE CAMERAS

ANYbotics//
GPS (RTK) Based Navigation for Outdoor EnvironmentsADVANCED SENSING //
13
360° OBSTACLE DETECTION4x DEPTH CAMERAS
ENVIRONMENT SCANNINGLIDAR
WIDE ANGLE CAMERAS
GPS (OPTIONAL)

ANYbotics//14
SPOTLIGHT
THERMAL CAMERA
Carry a payload with up to 10 kg
Example inspection payload
Access to USB, Ethernet, and power sockets
Interface via ROS APIs
Dedicated onboard computer for custom applications
CPU
ZOOM CAMERA
PAN-TILT UNIT
Expandable Platform to Tackle a Wide Range of ApplicationsPAYLOAD OPTIONS //

ROS For ANYmal
15

ANYbotics//
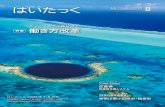
System OverviewROS //
16
Navigation PC
Localization
Terrain Mapping
Navigation & Mission Planning
Application PC
Visual Inspection
Thermal Inspection
Audio Inspection
Operator PC
Remote Control UI
Visualizations
Mission Control
Locomotion PC
State Estimation
Locomotion Control
12x ANYdrives IMU 4 Depth Cameras LIDAR
Ethe
rnet
WiFi
Radio
Safety operator
Thermal Camera Microphone Visual Camera

ANYbotics//
System OverviewROS //
17
Safety operator
Navigation PC
Sensing & Localization
Terrain Mapping
Path Planning & Following
Mission Planning
Application PC
Visual Inspection
Thermal Inspection
Acousting Inspection
Operator PC
Remote Control UI
Visualizations
Mission commands
Locomotion PC
Actuation
Commands State
12 ANYdrives IMU 4 Depth Cameras LIDAR
WiFi
Thermal Camera Microphone Visual Camera
Switch
Router
2 Cameras
RT

ANYbotics//
Robot State Simulation, Visualization and InteractionROS //
18
GazeboSimulating the physical world around ANYmal.
RQTCombines different control and supervision elements into one GUI.
RVIZVisualizes off the shelf and custom ROS topics.

ANYbotics//
Interaction with Real RobotROS //
19
Real RobotReal physics guide the motion of ANYmal.
RQTCombines different control and supervision elements into one GUI.
RVIZVisualizes off the shelf and custom ROS topics.

ANYbotics//
ROS BagsROS //
20
Debugging and TuningIncrease of code reusability and more lightweight using and testing of the library. Simple setup of distributed systems.
ReplayingReplay the ROS bag on a local computer, run the corresponding algorithms on it and visualize the results in RVIZ.
RecordingRecord topics on the robot while performing any task and save them to a ROS bag.

ANYbotics//
ROS Agnostic DesignROS //
21
NAVIGATION_ROS
NAVIGATION_CORE
ROS NETWORK
ScalabilityIncrease of code reusability and more lightweight using and testing of the library. Simple setup of distributed systems.
IndependenceUsable in environment without ROS and minimal effort to update to new ROS versions
ModularitySeparate core algorithms (_CORE) from ROS interface nodes (_ROS). Plugins allow injection of ROS dependent code.
LOCALIZATION_ROS
LOCALIZATION_CORE
LOCOMOTION_ROS
LOCOMOTION_CORE

ROS Inside ANYmal
22

ANYbotics// Strictly Confidential
Sense-Think-ActLOCOMOTION // OVERVIEW //
23
State Estimation Whole-Body Control Actuation Robot
Sens
or
mea
sure
men
ts
Robo
t s
tate
Join
t c
omm
ands
Join
t to
rque
s

ANYbotics// Strictly Confidential
Perceptive LocomotionLOCOMOTION //
24
Stair Climbing Terrain Perception Obstacle Avoidance

ANYbotics// Strictly Confidential
Learning Locomotion SkillsLOCOMOTION //
25
SimulationUsing reinforcement learning in a simulator to learn specific motions and maneuvers.
Real RobotWith Sim-to-Real transfer the learned model is applied on the real robots. One specifically learned capability is fall recovery.

ANYbotics// Strictly Confidential
More Sense-Think-ActPERCEPTION AND NAVIGATION // OVERVIEW //
26
Near field perception
Localization Global Navigation
Local Navigation

ANYbotics// Strictly Confidential
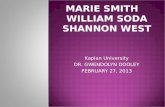
Simultaneous Localization & MappingPERCEPTION //
27
Hagenholz, Oerlikon Wangen an der Aare
Point Cloud based SLAMLIDAR and depth sensors are used to generate a map and localize within the map.
ScalableA localization accuracy of less than 10 cm is achieved while being scalable to large industrial environments.

ANYbotics// Strictly Confidential
Terrain MappingPERCEPTION //
28
Open Sourcewww.github.com/anybotics
Elevation MappingRobo-centric height maps are generated based on the surrounding depth data.
Grid MapDedicated data structure created for height maps and shared with the ROS community. Tight integration into RVIZ with a custom visualization plugin.

ANYbotics// Strictly Confidential
Path Planning & FollowingNAVIGATION //
29
CalculationGiven a point cloud based map, the software finds the shortest path from A to B in a graph. Based on the task it can switch between different controllers.
Path Planner Path Follower
ExecutionGiven a path the module outputs velocity commands to the locomotion controller. With the help of perception it can also avoid obstacles.

ANYbotics// Strictly Confidential
Regularly Collect and Interpret Physical Properties of Equipment and Environment
INSPECTION CAPABILITIES //
30
Reading Instruments Detecting Events Checking Health of Equipment
Monitoring Environments
GAUGES VALVES COUNTER PICTURE
GAUGES VALVES COUNTERS
PHOTO
THERMOGRAPHY ACOUSTIC LABELS
LEAKAGES MISSING PARTS
HOTSPOTS GASES ALARMS
TEMPERATURES
REALITY CAPTURE ESCAPE ROUTES
EQUIPMENT HUMANS

ANYbotics// Strictly Confidential
Factory AutomationAUTONOMOUS MISSION //
31
Failure
Success
Check Health
Start
MonitoringThe health of the system is constantly monitored. In case of a failure or undefined behavior a rescue behavior can be performed or a remote operator can be contacted.
RepeatTeach once, repeat forever. Navigation and inspection tasks can be scheduled. Each customer gets an easy-to-use interface to create custom missions.

ANYbotics// Strictly Confidential
Automated DockingAUTONOMOUS MISSION // EXAMPLE //
32
DockAutonomous maneuver.
Find docking stationPerception based detection system.
RestSwitch on power saving mode.
RepeatContinue once fully charged.

How We Keep Things Smooth
33

ANYbotics//
Computer SetupSOFTWARE TOOLS //
34
ConsistencyAll developers and all robots have the same setup. The computers run Ubuntu 20.04 LTS with ROS Noetic.
Code SharingSoftware version is controlled with Git. Gitlab acts as host and ANYbotics employs a monorepo structure. Open-source packages are maintained on GitHub.

ANYbotics//
Update
Quality Assurance
Tests on Hardware
SOFTWARE TOOLS //
35
Stable PPA
Nightly PPA /ROS Mirror
Not
ifica
tion
Commit
CI / Tests in SimulationUpdate
Notification
Unit testsRuns on every merge request.
GitLab CIRuns on pushed commit.
ROS integration testsRuns every night.
Hardware in the loop testOnce every week.
DebiansTested binaries are released frequently for customers.
Install

ANYbotics//
Rules for the DevelopersSOFTWARE TOOLS //
■ Software Development Instructions→ ROS and catkin best practices→ C++ style guide→ Development workflow
■ Documentation→ API documentation using Doxygen→ User manual using Sphinx
36

ANYbotics//
Partners Around the WorldANYMAL RESEARCH //
37

Thank you!
ANYbotics AG
www.anybotics.com
Subscribe to our newsletter and follow us @anybotics

ANYbotics//
Join Us!OPEN POSITIONS //
39
Careerwww.anybotics.com/career/