
Capítulo 2. Descomposición ortogonal propia en …Capítulo 2. Descomposición ortogonal propia en...
20
Capítulo 2. Descomposición ortogonal propia en reducción de modelos 47 (2.38) Sea , , , , entonces: (2.39) Donde ∈ , ∈ , ∈ , ∈ . Se validó el modelo reducido aplicando señales en los actuadores diferentes a las utilizadas para construir la :
Transcript of Capítulo 2. Descomposición ortogonal propia en …Capítulo 2. Descomposición ortogonal propia en...

Capítulo 2. Descomposición ortogonal propia en reducción de modelos 47
(2.38)
Sea , , , , entonces:
(2.39)
Donde ∈ , ∈ , ∈ , ∈ . Se validó el modelo reducido aplicando señales en los actuadores diferentes a las utilizadas para construir la :

48 Ubicación óptima de sensores y una técnica de reducción de modelos para el
modelamiento de sistemas de parámetros distribuidos
Figura 2.12 Validación del Modelo Reducido en los Puntos de Medición
0 500 1000 1500 2000 2500 30000
50
100
150
Tiempo (seg)
Tem
pera
tura
(°C
)
RESPUESTA DEL MODELO DE ORDEN COMPLETO (1415) vs RESPUESTA DEL MODELO DE ORDEN REDUCIDO (6)
0 500 1000 1500 2000 2500 30000
50
100
150
Tiempo (seg)
Tem
pera
tura
(°C
)
0 500 1000 1500 2000 2500 30000
50
100
150
Tiempo (seg)
Tem
pera
tura
(°C
)
0 500 1000 1500 2000 2500 30000
50
100
150
Tiempo (seg)
Tem
pera
tura
(°C
)

Capítulo 2. Descomposición ortogonal propia en reducción de modelos 49
Figura 2.13 Señales de Error en los Puntos de Medición
Cuando se aplican técnicas de reducción de modelos a Sistemas de Gran Escala invariantes en el tiempo se obtiene una ganancia enorme desde el punto de vista computacional. La simulación del sistema reducido (orden 6) descrito anteriormente tomó 0.75 segundos (CPU AMD Turion Dual-Core 2.1GHz, RAM 4Gb), en vez de los 1325 segundos que tomó la simulación del sistema de completo (orden 1415) en la misma máquina. En este capítulo se presentaron las bases teóricas y una aplicación práctica de la Proper Orthogonal Decomposition en la reducción de modelos. La técnica de POD está basada en la Descomposición en Valores Singulares que puede ser utilizada para la reducción de modelos estáticos y aproximación optima de matrices. El teorema 2.1 nos permite estimar de manera exacta el valor mínimo de la norma 2 del error que se genera al aproximar una matriz por otra de rango inferior, de la misma manera nos indica cómo construir dicha matriz óptima por medio de una sumatoria de matrices de rango 1 producto de la multiplicación de los vectores singulares de izquierda y derecha en la descomposición de valores singulares. Se comprobó mediante un caso de aplicación
0 500 1000 1500 2000 2500 3000-5
0
5
Tiempo (seg)
Señal de E
rror
(°C
)
Punto de Medición Placa 1
0 500 1000 1500 2000 2500 3000-4
-2
0
2
Tiempo (seg)
Señal de E
rror
(°C
)
Punto de Medición Placa 2
0 500 1000 1500 2000 2500 3000-2
-1
0
1
Tiempo (seg)
Señal de E
rror
(°C
)
Punto de Medición Placa 3
0 500 1000 1500 2000 2500 3000-2
-1
0
1
Tiempo (seg)
Señal de E
rror
(°C
)
Punto de Medición Placa 4

50 Ubicación óptima de sensores y una técnica de reducción de modelos para el
modelamiento de sistemas de parámetros distribuidos
como este teorema y la descomposición en valores singulares puedes ser utilizados en la compresión y aproximación de imágenes. De igual manera, la técnica POD usa el mismo principio para aproximar modelos dinámicos basándose en los datos experimentales que genera el modelo dinámico de gran escala. Esta técnica encuentra las direcciones de las dinámicas más relevantes del modelo dinámico para un experimento específico. Esto nos indica que el modelo de orden reducido producto de la técnica POD aproxima de manera precisa las dinámicas del modelo de simulación de gran escala si las señales de entrada se encuentran dentro del mismo rango de operación de las señales que generaron los datos de donde se calcularon las funciones POD base. Se pudo comprobar que el modelo de orden reducido para el reactor de polimerización aproxima aceptablemente las dinámicas relevantes del modelo basado en elementos finitos, reduciendo los tiempos de simulación de 1325 segundos a tan solo 0.75 segundos en una computadora convencional. Esta reducción en los tiempos de cómputo es alcanzada cuando el modelo es lineal como el caso de aplicación analizado en este trabajo. Los modelos en ecuaciones parciales no lineales cuando son discretizados por métodos numéricos como volúmenes o elementos finitos generan sistemas lineales variantes en el tiempo, es decir que sus matrices de estado varían en cada iteración de tiempo. En este caso la literatura reporta que una pobre reducción en los tiempos de cómputo, y se ha desarrollado investigación encaminada a acelerar los tiempos de cómputo de modelos lineales de orden reducido variantes en el tiempo (Astrid [8]). La mayoría de sistemas de ingeniería pueden ser modelados de manera más detallada usando ecuaciones diferenciales parciales, lo cual ha motivado el estudio y aplicación de estas técnicas de modelamiento en la industria. En este trabajo se realizó una aplicación de las técnicas de reducción de modelos para simulación, y el aporte se concentró en demostrar que estas técnicas de modelamiento avanzadas pueden ser aplicadas exitosamente en un ambiente industrial, donde todavía no se cuentan con equipos de cómputo especializado para resolver modelos complejos de simulación y donde solo es posible realizar simulaciones en computadoras personales.

3. Ubicación optima de sensores para la estimación de temperatura usando modelos de orden reducido
En este capítulo se integran las técnicas descritas en los capítulos anteriores ahora enfocados al problema de estimación de variables en sistemas físicos. Se presenta una variante del algoritmo de ubicación óptima de sensores para la identificación de sistemas de parámetros distribuidos en el cual se modifica la métrica para definir experimentos óptimos de identificación paramétrica por otra que permita realizar experimentos óptimos de estimación de variables usando modelos de orden reducido. Se presenta un caso de aplicación de transferencia de calor propio de la industria de los semiconductores. El capitulo inicia con el modelamiento y simulación de la transferencia de calor no lineal en una barra de silicio. En ésta etapa se genera un modelo lineal pero variante en el tiempo lo cual dificulta su uso para el diseño del estimador de estados y para el algoritmo de ubicación óptima de sensores enfocado a estimación. La solución propuesta se baso en el uso de un modelo linealizado del original. Posteriormente se generan bases POD a partir de datos de simulación del modelo no lineal las cuales son utilizadas para encontrar un modelo de orden reducido lineal en invariante en el tiempo. En este trabajo se propone el uso de modelos de orden reducido con dos objetivos: 1. Que permitan la implementación de algoritmos para la ubicación óptima de sensores enfocados a estimación. 2. Que permitan la implementación de estimadores de estados computacionalmente viables para sistemas de parámetros distribuidos descritos por EDP’s.
3.1 Transferencia de calor en wafers de silicio
La elevada conductividad térmica del silicio ofrece una solución eficiente al problema de aumentar los requerimientos de potencia de los circuitos integrados modernos. Elevadas conductividades térmicas son alcanzadas por medio de la purificación de los materiales semiconductores lo que resulta en alto desempeño, confiabilidad y una reducción generalizada del costo de manufactura para las compañías dedicadas a la producción de circuitos integrados.

52 Ubicación óptima de sensores y una técnica de reducción de modelos para el
modelamiento de sistemas de parámetros distribuidos
La conductividad térmica del silicio cambia drásticamente desde a
en un rango de temperatura entre 200K y 600K. Por lo tanto, el estudio de la
transferencia de calor no lineal entre materiales y componentes interconectados en un circuito integrado se ha convertido en un asunto relevante para el desarrollo de las futuras generaciones de microprocesadores. En este trabajo, se modeló la transferencia de calor en una barra de silicio de longitud L=0.1m con conductividad térmica no lineal aproximada por un polinomio de orden d de la forma:
En donde son coeficientes reales y T representa la variable temperatura medida en
grados Kelvin. Un diagrama de la barra en 1 dimensión se muestra a continuación: Figura 3.1 Diagrama del sistema físico
El modelo de la barra de silicio tiene 2 entradas, una fuente de calor dependiente del tiempo que es aplicada uniformemente a lo largo de la barra y un flujo de calor dependiente del tiempo que es aplicado en el extremo izquierdo de la barra (condición de frontera). El modelo de transferencia de calor está descrito por la EDP no lineal:
Donde es la densidad del silicio, su capacidad calorífica, es la
conductividad térmica dependiente de la temperatura descrita en la Ecuación 3.1. La variable espacial ∈ , el tiempo . En éste trabajo se asume que y son
constantes e independientes de la temperatura. Si se reemplaza la Ecuación 3.1 en la Ecuación 3.2 se tiene que el modelo matemático para la transferencia de calor en una barra de silicio es:
Capítulo 3. Ubicación optima de sensores para la estimación de temperatura
usando modelos de orden reducido
53
Con condiciones de frontera tipo Neuman:
3.2 Solución numérica para la transferencia de calor en la barra de silicio
Para solución numérica del modelo no lineal de transferencia de calor se implementó un esquema de diferenciación por Volúmenes Finitos. Una de las principales razones para usar este esquema es la interpretación física del modelo resultante, el cual está basado en balances de materia y energía en cada volumen finito. Esta relación evidente entre el algoritmo numérico y el principio físico dominante en el fenómeno de transferencia de calor fue la motivación principal para la implementación de este esquema de diferenciación. El método de volúmenes finitos es un caso especial de la formulación por diferencias finitas y consiste básicamente en 3 pasos. El primero es la integración del sistema de EDP’s sobre cada volumen de control expresando la conservación (el balance) de las propiedades físicas relevantes (Energía, Masa, Materia) en cada volumen finito. Posteriormente, la etapa de discretización involucra la substitución de aproximaciones por diferencias finitas de los términos del sistema integrado de EDP’s. Este paso transforma la característica infinito-dimensional de las EDP’s generando una aproximación de diferencias finitas de alto orden para el sistema original de EDP’s. La etapa final es la solución numérica del sistema dinámico resultante. A continuación se describen detalladamente los pasos para solucionar la EDP de la Ecuación 3.3 y Ecuación 3.4 por volúmenes finitos. El primer paso involucra la integración en todo el dominio espacio-temporal de la EDP en la Ecuación 3.2:
representa una integral en el volumen de control respecto a coordenadas
espaciales. El dominio espacial es discretizado en volúmenes finitos con las fronteras descritas en la Figura 3.2:
54 Ubicación óptima de sensores y una técnica de reducción de modelos para el
modelamiento de sistemas de parámetros distribuidos
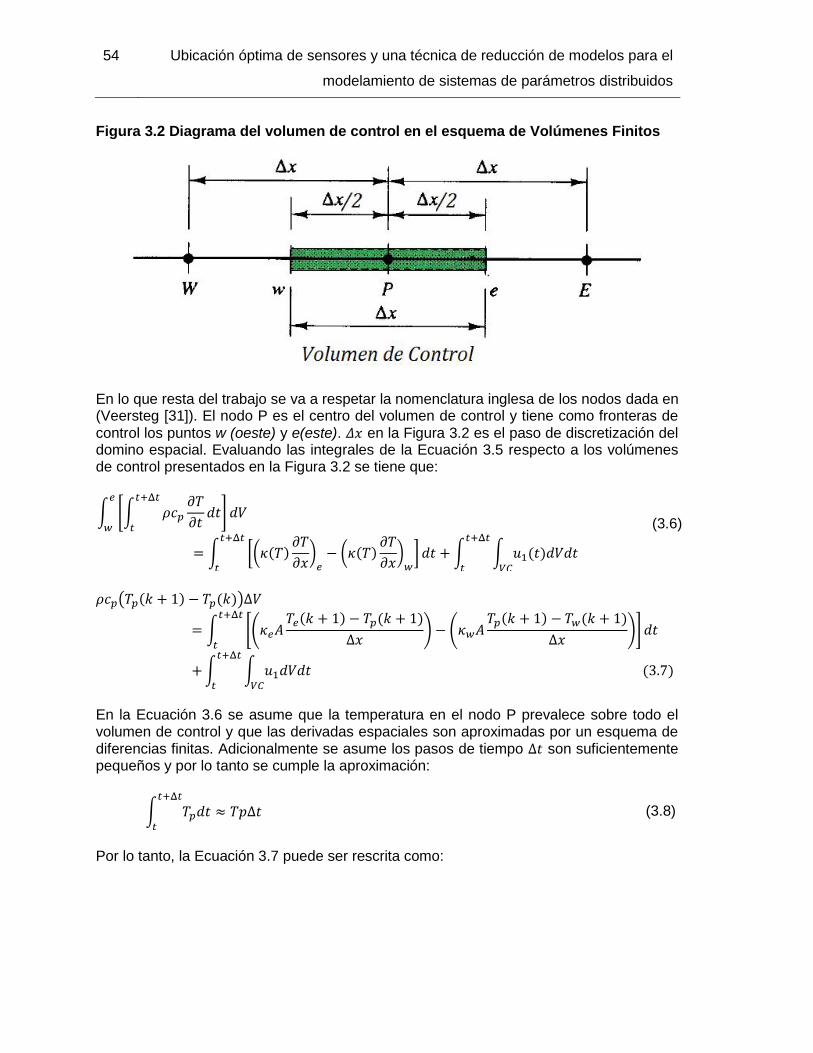
Figura 3.2 Diagrama del volumen de control en el esquema de Volúmenes Finitos
En lo que resta del trabajo se va a respetar la nomenclatura inglesa de los nodos dada en (Veersteg [31]). El nodo P es el centro del volumen de control y tiene como fronteras de
control los puntos w (oeste) y e(este). en la Figura 3.2 es el paso de discretización del domino espacial. Evaluando las integrales de la Ecuación 3.5 respecto a los volúmenes de control presentados en la Figura 3.2 se tiene que:
(3.6)
En la Ecuación 3.6 se asume que la temperatura en el nodo P prevalece sobre todo el volumen de control y que las derivadas espaciales son aproximadas por un esquema de diferencias finitas. Adicionalmente se asume los pasos de tiempo son suficientemente pequeños y por lo tanto se cumple la aproximación:
(3.8)
Por lo tanto, la Ecuación 3.7 puede ser rescrita como:

Capítulo 3. Ubicación optima de sensores para la estimación de temperatura
usando modelos de orden reducido
55
(3.9)
Reacomodando los términos en la Ecuación 3.8 se tiene:
(3.10)
Donde:
(3.11)
y son las conductividades térmicas en los nodos W y E las cuales son
diferentes debido a la dependencia no lineal de en la temperatura. La Ecuación 3.10 aplicada en todos los nodos de la malla de discretización espacial genera un sistema dinámico discreto de la forma el cual a su vez puede ser rescrito como un modelo en espacio de estados:
(3.12) En donde:
(3.13)
∈ es una matriz tridiagonal, ∈ y ∈ , donde es el número de volúmenes finitos que determina el orden del sistema dinámico, p=2 es el número de señales de control. Debido a que se modeló un sistema no lineal, la discretización por volúmenes finitos genera un sistema dinámico lineal variante en el tiempo.

56 Ubicación óptima de sensores y una técnica de reducción de modelos para el
modelamiento de sistemas de parámetros distribuidos
3.3 Simulación del modelo del proceso físico
Para la simulación del modelo matemático de transferencia de calor no lineal en el silicio descrito en la Ecuación 3.12 se consideraron los parámetros físicos descritos en la Tabla 3.1. Tabla 3.1 Parámetros físicos del modelo
Longitud de la barra
Densidad Capacidad calorífica
Parámetros de
Adicionalmente se implementaron señales de excitación correspondientes a una fuente de calor a lo largo de toda la barra y a un flujo externo de calor en la frontera izquierda de la barra tal como se muestra en el diagrama de la Figura 3.1. Las señales de excitación se presentan a continuación: Figura 3.3 Señales de excitación
Los parámetros de simulación se presentan en la Tabla 3.2:
0 100 200 300 400 500 600 700 800 900 10000
2
4
6
8
10x 10
5 SEÑAL DE CONTROL U1(t)
Tiempo (s)
Fuente
de C
alo
r (W
)
0 100 200 300 400 500 600 700 800 900 10000
0.5
1
1.5
2x 10
5 SEÑAL DE CONTROL U2(t)
Tiempo (s)
Fuente
de C
alo
r (W
)
Capítulo 3. Ubicación optima de sensores para la estimación de temperatura
usando modelos de orden reducido
57
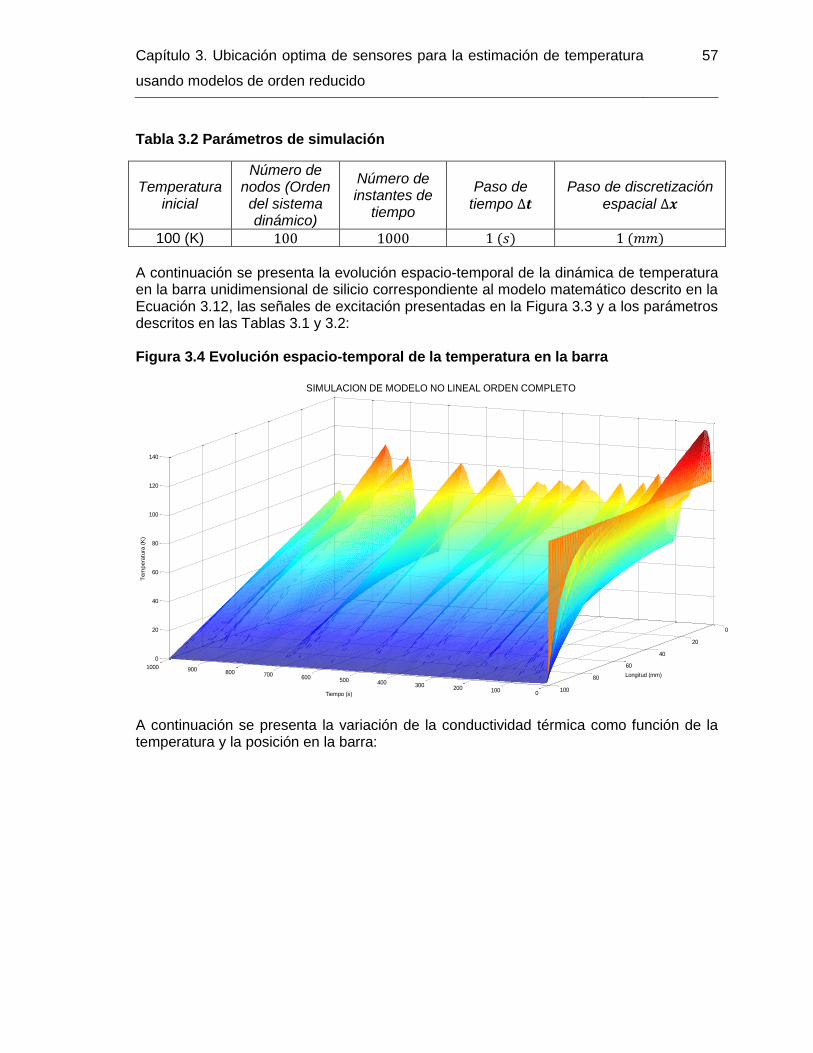
Tabla 3.2 Parámetros de simulación
Temperatura inicial
Número de nodos (Orden del sistema dinámico)
Número de instantes de
tiempo
Paso de
tiempo Paso de discretización
espacial
100 (K) A continuación se presenta la evolución espacio-temporal de la dinámica de temperatura en la barra unidimensional de silicio correspondiente al modelo matemático descrito en la Ecuación 3.12, las señales de excitación presentadas en la Figura 3.3 y a los parámetros descritos en las Tablas 3.1 y 3.2: Figura 3.4 Evolución espacio-temporal de la temperatura en la barra
A continuación se presenta la variación de la conductividad térmica como función de la temperatura y la posición en la barra:
01002003004005006007008009001000
0
20
40
60
80
100
0
20
40
60
80
100
120
140
Longitud (mm)
SIMULACION DE MODELO NO LINEAL ORDEN COMPLETO
Tiempo (s)
Tem
pera
tura
(K
)

58 Ubicación óptima de sensores y una técnica de reducción de modelos para el
modelamiento de sistemas de parámetros distribuidos
Figura 3.5 Evolución espacio-temporal de la conductividad térmica
3.4 Estudio de un modelo lineal para propósitos de estimación
Como se demostró en la sección 3.2, la discretización por volúmenes finitos de un sistema de EDPs genera un sistema de ecuaciones de alto orden lineales y variantes en el tiempo. (Astrid [8]) demostró que la ganancia en términos de capacidad y velocidad de cómputo obtenida con las técnicas de reducción de modelos no son evidentes para sistemas cuyas matrices de estado varían en cada instante de tiempo. Por este motivo, en este trabajo se estudió la validez de un modelo linealizado de la Ecuación 3.3 dentro de cierto rango de temperatura, tal que pueda ser utilizado como base del estimador de temperatura de orden reducido y para el algoritmo de ubicación óptima de sensores para estimación. Retomando la EDP de la transferencia de calor:
(3.14)
Se puede establecer que la EDP es no lineal para , por lo tanto se estudió el
modelo lineal para el caso en el que , es decir .
01002003004005006007008009001000
0
20
40
60
80
100
143
144
145
146
147
148
149
150
151
152
153
Longitud (mm)
EVOLUCION DE LA CONDUCTIVIDAD TERMICA EN EL TIEMPO
Tiempo (s)
Conductivid
ad T
érm
ica (
W/m
K)
144
145
146
147
148
149
150
151
152

Capítulo 3. Ubicación optima de sensores para la estimación de temperatura
usando modelos de orden reducido
59
Figura 3.6 Diferencia de temperaturas entre el modelo lineal y el no lineal
En la Figura 3.6 se presenta la diferencia de temperaturas entre el modelo no lineal y lineal cuando fueron simulados bajo las mismas condiciones de excitación presentadas en la Figura 3.3 y bajo los mismos parámetros físicos y de simulación presentados en la Tabla 3.1 y Tabla 3.2. Se puede comprobar que el rango de diferencia es de 10K entre los dos modelos. Esta situación justifica el uso del modelo lineal de bajo costo computacional como base del estimador de orden reducido y también como modelo para el algoritmo de ubicación óptima de sensores enfocado a estimación.
3.5 Reducción del modelo lineal de la transferencia de calor en la barra de silicio
La simulación del modelo no lineal de orden completo es utilizada para generar una matriz snapshot siguiendo la metodología descrita en la sección 2.8 de este trabajo.
La matriz es utilizada para construir una matriz de correlación ∈ similar a
la de la Ecuación 2.32. Los valores singulares de la matriz de correlación representan el nivel de relevancia de cada base ortogonal obtenida por este método y se presentan a continuación en escala logarítmica:
0100200
300400500
600700800
9001000
0
20
40
60
80
100
-10
-8
-6
-4
-2
0
2
Longitud (mm)
DIFERENCIA TEMPERATURA ENTRE MODELO NO LINEAL Y LINEAL
Tiempo (s)
Tem
pera
tura
(K
)
-9
-8
-7
-6
-5
-4
-3
-2
-1
0

60 Ubicación óptima de sensores y una técnica de reducción de modelos para el
modelamiento de sistemas de parámetros distribuidos
Figura 3.7 Espectro de valores singulares de la matriz
Teniendo en cuenta el nivel de relevancia de las primeras 5 bases, se definió que el modelo reducido va a ser de orden 5. La forma de las primeras 5 bases POD se presenta a continuación:
0 10 20 30 40 50 60 70 80 90 100-14
-12
-10
-8
-6
-4
-2
0
2
4
6
N-ésimo Valor Singular
Log
10(V
alo
r S
ingula
r)
ESPECTRO DE VALORES SINGULARES DE LA MATRIZ SNAPSHOT

Capítulo 3. Ubicación optima de sensores para la estimación de temperatura
usando modelos de orden reducido
61
Figura 3.8 Forma de la primera base POD
Figura 3.9 Forma de la 2da, 3ra y 4ta base POD
0 10 20 30 40 50 60 70 80 90 100-0.18
-0.16
-0.14
-0.12
-0.1
-0.08
-0.06
-0.04
-0.02
0PRIMERA BASE POD
Longitud(mm)
Base P
OD
0 10 20 30 40 50 60 70 80 90 100-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15SEGUNDA BASE POD
Longitud(mm)
Base P
OD
0 10 20 30 40 50 60 70 80 90 100-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1TERCERA BASE POD
Longitud(mm)
Base P
OD
0 10 20 30 40 50 60 70 80 90 100-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4CUARTA BASE POD
Longitud(mm)
Base P
OD
0 10 20 30 40 50 60 70 80 90 100-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3QUINTA BASE POD
Longitud(mm)
Base P
OD

62 Ubicación óptima de sensores y una técnica de reducción de modelos para el
modelamiento de sistemas de parámetros distribuidos
El modelo lineal invariante en el tiempo de orden reducido es generado siguiendo los lineamientos de la sección 2.8 de éste trabajo. Para validar el modelo lineal de orden reducido se implementaron unas señales de excitación diferentes a las presentadas en la Figura 3.3: Figura 3.10 Señales de Excitación para Validación
0 100 200 300 400 500 600 700 800 900 10000
1
2
3
4
5
6
7
8
9
10x 10
5 SEÑAL DE CONTROL U1(t)
Tiempo (s)
Fuen
te d
e C
alor
(W)
0 100 200 300 400 500 600 700 800 900 10000
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2x 10
5 SEÑAL DE CONTROL U2(t)
Tiempo (s)
Fuen
te d
e C
alor
(W)

Capítulo 3. Ubicación optima de sensores para la estimación de temperatura
usando modelos de orden reducido
63
Figura 3.11 Error de aproximación del modelo de orden reducido al modelo no lineal de orden completo para las señales de validación
De la Figura 3.11, se puede evidenciar que el modelo lineal de orden reducido generado con las bases POD del sistema no lineal aproxima aceptablemente las dinámicas del modelo no lineal presentando errores en el rango de -5K a -10K en promedio. Por éste motivo, el modelo de orden reducido lineal e invariante el tiempo de orden 5 será utilizado como base para el algoritmo de ubicación óptima de sensores para estimación de estados y para el diseño de un estimador de temperatura en las siguientes secciones.
3.6 Ubicación óptima de sensores enfocado a estimación de estados
La medición de variables tiene un papel crucial tanto en el desempeño, economía, viabilidad y seguridad de todos los sistemas de ingeniería. Sin embargo, la instrumentación industrial moderna está sujeta al costo y la falta de tecnología existente para la medición de ciertas variables físicas, por lo tanto, en ambientes industriales es común encontrar sistemas adquisición de variables limitados por el número de sensores disponibles. Los sistemas de ingeniería son distribuidos por naturaleza lo cual hace
0100200300
400500600700800900
1000
0
20
40
60
80
100
-20
-15
-10
-5
0
5
10
Longitud ((mm))
ERROR DE APROXIMACION DEL MODELO LINEAL DE ORDEN REDUCIDO AL MODELO NO LINEAL
Tiempo (s)
Tem
pera
tura
(K
)
-15
-10
-5
0
5

64 Ubicación óptima de sensores y una técnica de reducción de modelos para el
modelamiento de sistemas de parámetros distribuidos
imposible tomar mediciones de todas las variables del proceso en todos los puntos espaciales ya que se cuenta con un numero finito de sensores. Los estimadores de estados son estructuras matemáticas basadas en modelo matemático del proceso que permiten reconstruir las variables de un sistema dinámico (proceso industrial) a partir de un numero finito de variables medidas (sensores) y a partir de las entradas del proceso. Una Planta típica tiene entradas físicas, perturbaciones y un número limitado de salidas medidas. Un esquema detallado de la planta con su estimador se presenta a continuación: Figura 3.12 Planta física y un estimador de estados
Para plantas que están descritas por modelos lineales invariantes en el tiempo, el Filtro de Kalman provee la solución óptima para el siguiente problema de estimación de estados: Dado el modelo de la planta en espacio de estados:
(3.15) En donde con las salidas medidas de la planta, es el vector de perturbaciones de la planta y es ruido de medicion (blanco), se cuentan con las matrices de covarianzas:
(3.16) El Filtro de Kalman tiene la siguiente ecuación de estado:
(3.17)
En donde es la matriz de ganancias óptima, es el vector de estados estimados en
el tiempo , es el vector de salidas estimadas de la planta en el tiempo . La matriz de ganacias es el resultado de la solución de una Ecuación Algebraica de Riccati,

Capítulo 3. Ubicación optima de sensores para la estimación de temperatura
usando modelos de orden reducido
65
minimiza la covarianza del error en estado estacionario
y puede ser calculada como:
(3.18) Se puede apreciar en la Ecuación 3.17 y Ecuación 3.18 que el modelo del estimador de estados tiene el mismo orden del sistema que requiere ser estimado. Esto constituye un serio problema cuando se requiere diseñar estimadores de estados para sistemas de alto orden, y las técnicas numéricas modernas para la solución de las Ecuaciones algebraicas de Riccati no son capaces de abordar el problema si el orden es superior aproximadamente a 200. Esta situación justifica el uso de modelos de orden reducido que permitan aproximar la estimación de variables en modelos de alto orden como los generados por la discretización de sistemas de EDPs. En la estimación de estados para sistemas de parámetros distribuidos se presenta un problema similar al de identificación paramétrica en el sentido en que se requieren ubicar un número finito de sensores en el dominio espacial tal que la energía de las salidas sea máxima para poder realizar la mejor estimación posible, es decir se busca la ubicación óptima de sensores para estimación de sistemas de parámetros distribuidos. La metodología propuesta en éste trabajo para encontrar dichas posiciones se basa en una métrica relacionada con la energía de los estados en sistemas dinámicos lineales invariantes en el tiempo. Se propone el uso del algoritmo descrito en la sección 1.2 con una variante en la métrica que describe el experimento óptimo. En el capítulo 2, se diseñaron experimentos óptimos para identificación usando una función objetivo basada en la Matriz de Información de Fisher como métrica. En éste capítulo, se propone el diseño de experimentos óptimos para estimación usando una función objetivo basada en el Gramiano de Observabilidad. Definición 3.1. Dado un sistema discreto lineal invariante en el tiempo descrito por:
(3.19) El Gramiano de Observabilidad de horizonte finito sobre observaciones es la matriz
∈ definida como:
(3.20)
El Gramiano de Observabilidad de horizonte infinito es la matriz ∈ definida como:
(3.21)
En donde es el orden del sistema dinámico.

66 Ubicación óptima de sensores y una técnica de reducción de modelos para el
modelamiento de sistemas de parámetros distribuidos
El gramiano de observabilidad está íntimamente relacionado con el concepto de observabilidad de la teoría de control y se puede demostrar que un sistema es observable si y solo si es una matriz definida positiva para todo . La existencia del gramiano de observabilidad de horizonte infinito está sujeta a la estabilidad del sistema descrito en la Ecuación 3.19, es decir que dicho límite existe y
está definido si y solo si los valores propios de la matriz se ubican dentro del círculo unitario en el plano complejo. En la práctica es mucho más sencillo calcular el gramiano de horizonte infinito que el de horizonte finito, dado que el Gramiano de Observabilidad de Horizonte Infinito para sistemas discretos es la solución de la Ecuación Algebraica de Lyapunov:
(3.22) Definición 3.2. La Energía de Observación de los estados sobre observaciones
con se define como:
(3.23)
Teorema 3.1. Para la energía de observación definida en la Ecuación 3.23 se tiene que:
(3.24)
Prueba:
(3.25)
Definición 3.3. La Energía de Observación de horizonte infinito se define como:
(3.26)
La Ecuación 3.26 muestra que la energía de observación de los estados de un sistema dinámico lineal está directamente relacionado con el Gramiano de Observabilidad de horizonte infinito por medio de una relación cuadrática de los estados, y que la máxima energía producida al observar las salidas de una planta lineal cuyos estados iniciales son viene dada por la Ecuación 3.26. El Gramiano de Observabilidad de horizonte infinito es una matriz simétrica, por lo tanto su descomposición en valores singulares viene dada por:


















