
CAP-Scan in Mauritania Evaluation of MfDR Capacities Description of the exercise.
Upload
rotariu-dianaCategory
view
310download
0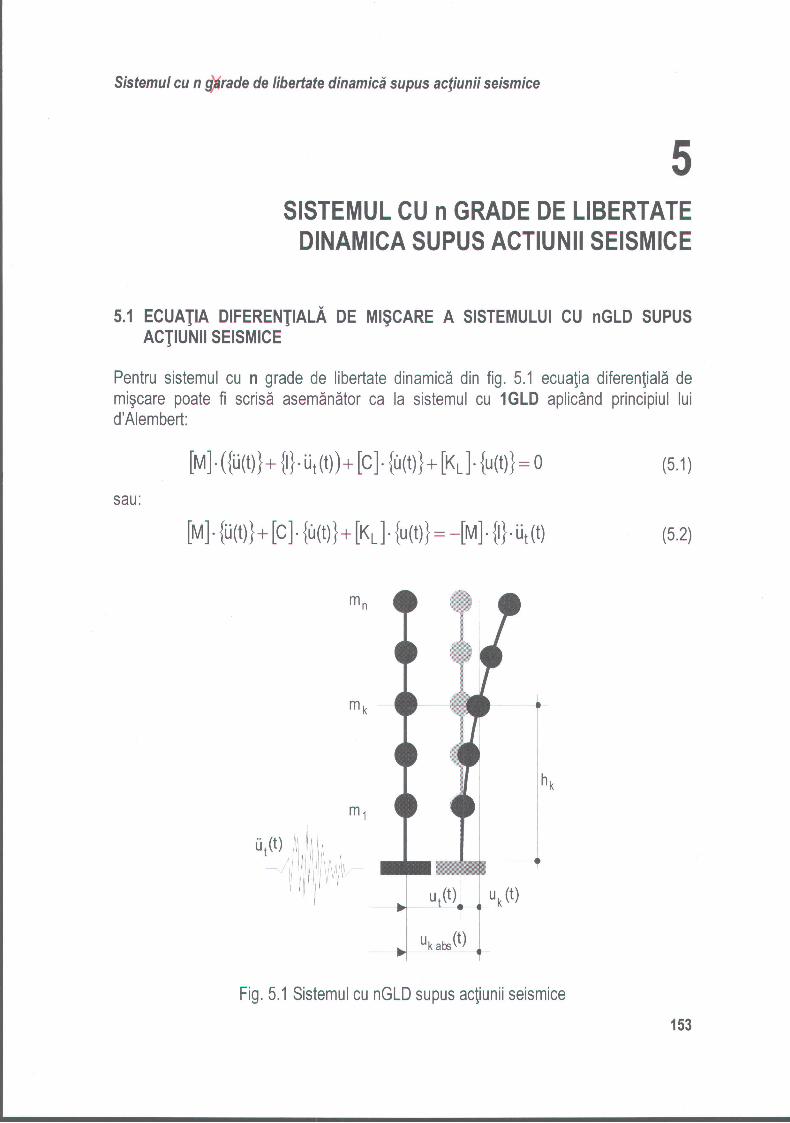
Sisfemul cu n $rade de libertate dinamicd supus acliunii seismice
5SISTEMUL CU n GRADE DE LIBERTATE
DINAMICA SUPUS ACTIUNII SEISMICE
5.1 ECUATTA DTFERENTALA DE M|$CARE A STSTEMULUT CU nGLD SUPUSACTTUNil SETSMTCE
Pentru sistemul cu n grade de libertate dinamicd din fig. 5.1 ecualia diferen[iali demigcare poate fi scrisi asemindtor ca la sistemul cu 1GLD aplicAnd principiul lui
d'Alembert:
ltut]. ({i;tt)}* {l}. it1(t))+ [c] {'t0}+ Krl. {rttl} - o
sau:
lul. {iittl}* [c]. {u(0}* K' I {rttl} - -[M]. {t}. ii, ttl
(5.1)
(5.2)
'r1,fi r,r
Fig. 5.1 Sistemul cu nGLD supus acfiuniiseismice
153

In care [M] este matricea de ine(ie (3.59) Si
(3.60), iar [C] este matricea de amortizare:
lnginerie serlsmicd
r.-'IlK'-I este matricea de rigiditate laterali
c1n
Q2n
cnn
cr cn
czl czz
Cn1 Cn2
(5 3)[c]=
Matricea de amortizare este o matrice plind gi poate fi constituitd pe baza unor modele
[inand seama de fractiunea din amortizarea criticd. In paragraful5.2 se prezintd modelulRayleigh cel mai des utilizat la constituirea acestei matrice pentru sistemele structurilorutilizate in domeniul construc[iilor.
Termenii {tittl} gi {tttl} sunt vectorii acceleraliilor relative (3.62) 9i respectiv ai
deplasirilor relative (3.63) corespunzdtoare gradelor de libertate dinamicd alemodelului.
Vectorul {uftl} este vectorul vitezelor relative:
{u(0}- (5 4)
fr, (t)- l\-/
:
ur, (t)
un(t)
iar {} vectorul unitate:
care permite determinarea fo(ei de ine(ie de corp rigid, corespunzitoare termenului
liber din ecualia (5.2), rezultati in sistem prin aplicarealabazd a unei accelera[ii Ut(t),
fig. 5.1.
154
(5 5)

Sisfemul cu n garade de libeftate dinamicd supus acliunii seismice
Pentru gradele de libertate de transla[ie pe direc[ii diferite este necesara indicareadirec[iilor pe care se va aplica acceleralia terenului. Daci accelera[ia aclioneazd pe
toate direc[iile, se va folosi vectorul unitate [] , rela[ia (5.5). In alte situa[ii se utilizeazi
un alt vector {A}, retalia (5.5'), cu valori egale cu 1 sau frac[iuni de 1 pe direcfia ac{iunii
seismice gi 0 pe direcfiile care nu :
1
1
- directie pe care actioneazd ii1(t)cu intreaga intensitate
- direc{ie pe care acfioneazd ii,(t)cu intreaga intensitate
- direc[ie pe care aclioneazd ii,(t)cu 0.5 din intensitate (5.5,)
- Oirectie pe care nu ac[ioneazd i,i,(t)
- direclie pe care ac[ioneazd ii,(t)cu intreaga intensitate
{n}-
5.2 MODELUL RAYLEIGH PENTRU DETERMINAREA MATRICEI DE AMORTIZARE
Modelul Rayleigh considerd matricea de amortizare ortogonald 9i este datd de rela[ia:
[c] - r'e tul (lrurft .tr,- ll e . (- *,+oo)e
:
0.5
T
(5 6)
Inmullind matricea [C] f, stinga cu matricea modald transpusd h]t gi la dreapta cu
matricea modali [Q], rezultd amortizarea generalizati [C]- ,
lcl. - tol tcl tol (5 7)
Aplicind proprietatea de ortogonalitate, vezi pct. 3.5.2, pentru doud moduri succesivergi k:
{o}l [c].{o}n-o urk+t'^rr
astfel cd un termen din matricea generalizata (5.7) devine :
(5.e)
155
(5.8)
ck = {o}l [c] {o}n

lnginerie selsmrcd
Inlocuind (5.6)in (5.9) rezultd:
ck = ?o, toll tvrl (tvrl-' K..ll to)- (5 10)
(5.11)
(5.12)
Stiind cd pentru sistemul cu nGLD aflat in oscila[ii libere neamortizate avem sistemul
omogen (3.69), care pentru a avea solu[ii diferite de cea banali trebuie impusd condi{ia(3.70), ce conduce la:
Krl: ,? '[M]
Inlocuind (5.1 1) in (5.1 0) rezultd:
din care rezultd expresia (5.13):
ck : r'e .,xfr' .{o}l [v] {o}ne
in care inlocuind masa generalizatd aferenti modului k data
rezultd:
ck:?*. {o}l tnrl (trr,rl-'.ri tMll {oh
(5 13)
de (3.82) in (5.13)
Ck : Ioe .,.^r?t M1e
Stiind cd frac[iunea din amortizarea criticd este dati de rela[ia
ccr = 2.w.m , rezultd pentru formele generalizate expresia:
(5 14)
(3.31) in care
ck I oe . .rrfrt ' Mr,
_e9k- (5 15)
(5.1 6)
Ccrk 2.trt1 .M1
sau:
€r : Icr. .ulfrt-te
156

Sisfemul cu n garade de libertate dinamicd supus acliuniiserlsmice
Particularizind pentru 0 = 0, e = 0 9i 1 9i e = - 1, 0 gi 1 rezulta urmatoarele expresii ale
matricei de amortizare:
a. e=0
sau:
Astfel c6:
Astfel cd:
-1-1l : ,'cto
'trlt
crg = 2'\t'wt
lc]: "o .[wt]
fcl- 2.\t.rr.[u]
1 -t1Z'oo'uJr
' * i'ot'{uJt
1 t1i'oo'uJz
' * 2'ot'uz
(5 17)
(5 18)
(5 1e)
ln aceste condi[ii factorul de amortizare este invers proportional cu frecventa ceea ce
face ca modurile superioare sd fie pulin amortizate.
b. e=09i1
L
ltr-1,,-
[r''l 1
{ -'}:-'
[€zJ 2
(5 20)
sau:
{"'}Lat J
1
,', .u1
1
,, @2
(5.21)
(5.22)[c]- oo .[M]* *, .Krl
157

Inginerie seismicd
Acest model este cel mai des utilizat in programele de calcul in varianta in care cele
doud frac[iuni din amortizarea criticd sunt egale (Er : \z: \), astfel cd cei doi
coeficienli devin:
cto = (5 23)(t)1 * tJ2
0"1:2.\.q.w2
2.t,
(5.24)(t)1 *(t)2
c. e=-1,09i 1
(5 25)
Astfel cd:
[c] = o-, . [M]' K'- ]* c'o . lvt]* ", . [Kr ] (5 26)
ln cazurile (b.) gi (c.) coeficientul de amortizare este direct propo(ional cu frecven[aceea ce face ca modurile superioare sd fie puternic amortizate.
5.3 ANALIZA SPECTRALA
Analiza spectrali a rdspunsului unui sistem cu n grade de libertate dinamici constd inexprimarea rdspunsului prin intermediul unui sistem de n ecua[ii independentecorespunzdtoare fiecirui mod propriu de vibrafie. Acest lucru se poate realiza prin
,,decuplarea" sistemului de ecuatii diferentiale utilizind coordonate independente,denumite coordonate modale.
Prin analiza spectrali se pune in evidenti participarea fiecirui mod propriu devibratie la rispunsul total.
["-'l
lilj
(I)1
w2
uJ3
11uli (l)1
11wi @2
11ul! (l)3
[:,1 1
1;:j=u
158

Srfemul cu n garade de libertate dinamicd supus acliunii seismice
Pentru a se obtine decuplarea sistemului de ecualii se va tine seama de proprietatea de
ortogonalitate (3.80), care din punct de vedere fizic inseamni ci lucrul mecanic al
fo(elor dintr-un mod propriu de oscilatie cu deplasdrile altui mod sunt nule, Pe bazaproprietdlii de ortogonalitate se vor utiliza matricele generalizate ale masei (3.82), ale
rigidita{ii (3,83) 9i amortizirii (5.7).
Vom considera ci rdspunsul sistemului cu nGLD pe directia unui grad de libertate k se
obfine prin suprapunerea rispunsurilor pe fiecare mod propriu de vibralie i, fig.5.2:
Astfel vom considef? r'licoordonata generalizati corespunzdtoare modului i de oscilafie,astfel incAt rdspunsul intr-un mod propriu de oxcilafie i sd fie o funclie de forma moduluipropriu O*, :
uri(t): Qri .ni(t) (5 28)
n
u*(t)-Iun,(t)
ur(t)- ie* .ni(t)i:1
(5.27)
(5 2e)
sau
utt
utz
Fig.5,2 Rdspunsul sistemelor cu 1 GLD componente ale sistemului cu n GLD
159

lnginerie sercmrcd
Pentru simplificare in ecua[ia diferenliald de migcare (5.2)vom inlocui:
{r}= -tMl {t}.ii,ttl
Astfel inncAt ecua[ia (5.2) devine:
[w].{uttl}* [c] {rttl}* K,_1.{'ttl}- {r}
(5 30)
(5 31)
Inlocuind in (5.31)vectorii deplasdrilor, vitezei 9i acceleratieicu notalia (5.29)vom avea:
{,(t)}- [o] {n(t)}
{r(t)}= [o] {n(t)}
{u0}- [o] {n(t)}
in care [Q] este matricea modald:
hl= ltoh{ob {oh {o},1
Inlocuind (5.32), (5,33) 9i (5.3a)in ecuatia (5.31)conduce la:
tMl tol {n(t)}*tcl tol {n(t)}*K,l tol {n(t)}-{r}
Preinmultind ecuatia (5.36)cu traspusa matricei modele rezultd:
tol M tol ffit))+[o]T tcl tol {(t)}+[o]T Kl tol t(t)]-[o]' {r} (5 37)
care datoritd proprietdfii de ortogonalitate conduce la sistemul de ecualii decuplat:
lt tu tl {'i(t)}* [t c t].{n(t)}* [t r t] {n(t)}- {p} (5 38)
in care s-a notat:
tol {r}= {p} (5 3e)
Astfel sistemul de ecua[ii (5.31) s-a transformat intr-un sistem de ecua{ii independente(5.38) care poate fi scris gi sub forma (5.38').
160
(5 32)
(5 33)
(5 34)
(5 35)
(5 36)

Srlsfemul cu n garade de libeftate dinamicd supus acliunii seismice
M, . ri,(t)+ c, . n,(t)* K, . rt,(t) : P,
M, .ij,(t)+ C, .n,(t)+ K, .11,(t)- P,
M, .ri,(t)+c, .n (t)*K, .n,(t)-P(5.38',)
M, .ij.(t)+ C. .rt.(t)+ K. .11.ft)- R.
In aceste condilii rezultd n sisteme de ecualii, care pot fi abordate independent unul de
celdlalt, ca gi sistemul cu un grad de libertate dinamici, vezi cap.3, ale cdror solu[ii sunt
date de integrala Duhamel.
lmpa(ind ecualia corespunzitoare modului i de oscilalie la masa generalizatd Mi ( vezi
rela[ia (3.82)) aferenta modului i rezulti:
ri (t)* 2.\, .0 . t (t)+ uri . n (t) - +/ | rt \ / M
Rdspunsul ecua[iei (5.40) dat de integrala Duhamel (4.13) este:
rti(t) = + + le,trl . s-€i r'ri (t-')sin ur;(t - t)dt
iar:
{p}-tol {r}--Pf Ml {l}.ii,(0--[o]' [M] {l} ii,rtl
gi termenul aferent modului i de oscila[ie este:
Pi(tl - -{o}' tMl {t}.u,ttl
care inlocuit in (5.41) devine:
{o}l [u] ttt .1 . iij, (r).s-€i'oi'(t-t)sino;(t - t)dt(r); o"'
(5 40)
(5 41)
(5.42)
(5 43)
(5.41')Mi
rli (t) :
161

lnginerie sepmrci
Inlocuind masa modali aferentd modului i oblinem rdspunsul de forma:
ti(t) : -eryEl.1.iu,(r).e-6i roi (t-r)sinur;(t-t)dr (5.41,,)''\./ toll lu].tot' t,r; 6
Primul termen din solutia (5.41") il vom denumi factorul de participare modali:
(5.44)
sau:
t-n
I Qs 'm1k=1
(5.44',)
iofr, .'*k=1
Este o valoare subunitard care indicd participarea fiecdrui mod propriu de vibra[ie i la
rdspunsul seismic total al sistemului.
Suma factorilor de participare modald corespunzdtoare celor n moduri de vibra[ie areproprietatea:
nr[ :1i=1
(5 45)
(5.43)
Deplasarea pe direclia gradului de libertate k in modul i de oscilatie, datd de rela[ia(5.28) in care inlocuim (5.41") devine:
{o}l lul tt} 1 turi(t)- -tD*,
to}I .[rr,r] tol ,, ltj.(').g_€i.(,i.(t_t)sinul;(t _ t)dt (5'46)
astfel cd putem defini aga numitul factorul de formi a rispunsului pe directiagradului de libertate k in modul de vibratie i de forma:
toll lul.ttl
{e}i .[t',t].ttl
{o}l [ttt].tol'
162
qri : Qri 'toll .[u].tot'

Ssfemul cu n garade de libertate dinamicd supus acliunii seismice
Factorul de formi mai poate fi scris 9i sub forma:
n
IQp 'mg'n k=1
Iki = Ari ';' ^ (5.43')
IQf; 'm1k=1
Cu aceste notatii (5.46) devine:
/ \ ' lU,(t).g-€i''i{t-,)sino.(t-r)dtuti(t): -nki ,^l o
(5.46')
(5.47)
Ceea ce este important de relinut este faptul cd rdspunsurile maxime pe fiecare modpropriu de oscilafie nu pot fi adunate, acestea producdndu-se in momente diferite detimp, fig,5.3, astfel cd:
lu*(t),,,, + lI'- ft1'._
utn
n
I u*,i=1
urr
uiz
Fig.5.3 Rdspunsul maxim pe fiecare mod propriu de oscilatie a sistemului
163

Inginerie sercmicd
In aceste conditii stabilirea rdspunsului unui sistem cu nGLD la o ac[iune dati poate fiob[inut prin sumarea rispunsurilor fiecdrui mod propriu de vibralie, fig.5.3, la fiecare pas
de timp, dupd care se poate stabili rdspunsul maxim.
For[a maximd corespunzdtoare fiecdrui mod propriu de oscila[ie i se poate ob{ine pe
baza spectrelor seismice de rdspuns, sistemul de ecualii (5.31) fiind decuplat in n
sisteme cu un grad de libertate dinamicd (5.38) gi respectiv (5,38').
Analizdnd solulia (5.46'), ca rdspuns in deplasdri al sistemului cu nGLD pe direcliagradului de libertate k gi modul i de oscilafie, il putem considen ca produs din doi
termeni, o constantd reprezentatd de factorul de participare modald qri gi solu[ia datd de
integrala Duhamel (4.33).
Valoarea maximd a rdspunsului aferentd gradului de libertate k in deplasdri, vitezesau acceleralii, pentru fiecare mod propriu de oscila{ie i, se poate determinautilizind valorile spectrale (vezi cap. 4). In felul acesta forti maximi Fri, in valoareabsolutd, de pe directia gradului de libertate k gi modul i de oscilatie se poate
calcula astfel:
lFr,i(t)lrr, : Fki : m1 . Int (t)lrr, : ITrk . Iri .Sa,i
este for[a maximd absolutd pe direc[ia gradului de libertate k inmodul ide oscila[ie;
masa aferentd gradului de libertate k;
- coordonata generalizatd in modului i de oscilalie ca accelera[ie
maximi absolutd rezultatd pe durata de timp t;
rli - factorul de formd al raspunsului pe direc[ia gradului de libertate k inmodul de vibra[ie i;
Sa,i - valoarea spectrald a accelera[iei corespunzdtoare modului i de' oscilatie aferentd acliunii seismice considerate.
AplicAnd acest procedeu de calcul pot fi determinate fo(ele seismice maxime ale
unui sistem supus actiunii seismice, pentru fiecare mod propriu de oscila[ie i inparte, pe direc[ia fiecarui grad de libertate dinamicd acordat. Aceste fo(e pot fiaplicate static pe sistem, fig.5.4, rezultAnd starea maximd de eforturi, deplasiri,tensiuni gi deforma[ii, adici se acumuleazd maximul energiei poten[iale aferentemodului respectiv de vibralie.
164
(5 48)
In care:
lFri(t)lr.*
II11
Int {t)l,nr*

Sisfemul cu n garade de libeftate dinamicd supus acliunii seismice
a. b.
Fig.5.4 For[ele maxime aplicate pe direc(ia gradelor de libertate dinamicd
acordate unuisistem cu nGLD in modul 1 (a.) 9i un mod i (b.) de oscilatie
5.4 SUPRAPUNEREA RASPUNSURILOR MODALE
Rispunsul maxim al sistemului se poate face 9i prin utilizarea unor metode probabilistice
de suprapunere a efectelor asupra componentelor structurale ale sistemului. In acest
sens in literatura de specialitate sunt date mai multe procedee de suprapunereprobabilistici a rispunsurilor maxime corespunzitoare fiecdrui mod propriu de vibrafie,
unele dintre acestea fiind specifice numai anumitor tipuri de structuri.
Astfel, in mod curent in analizele rispunsului la acliunea seismicd se utilizeazd
ridicina medie pitratici SRSS (Square Root of Square Sum) a rispunsurilor pe un
numdr r de moduri proprii de oscila[ie aplicati eforturilor, deplasdrilor, tensiunilorsau deformaliilor specifice rezultate intr-un sistem:
in care:
trr-E
(5 4e)
trr-E,k
este rdspunsul maxim al sistemului aferent unei sec[iuni E, ca efort,
deplasare, tensiune sau deformalie specifici;
este rdspunsul maxim al sistemului aferent aceleiagi sec[iuni E in modul kde oscilalie, ca efort, deplasare, tensiune sau deforma[ie specifici.
I13-
165

lnginerie serlsmhd
Nu totdeauna este necesara luarea in consideratie a tuturor modurilor proprii de oscilalien ale unui sistem cu nGLD, intrucdt unele dintre aceste pot avea efecte nesemnificative
asupra rispunsului sistemului, sau pot fi moduri locale care din punct de vedere
energetic pentru rdspunsul ansamblu structural sunt nesemnificative.
Limitarea numdrului de moduri luate in calcul r se face prin analiza factorului de
participare modald f, astfel ci vor putea fi luate in consideratie numai acele moduri
pentru care f are valori semnificative 9i a cdror sumd indeplinegte in principi condi[ia:
> 0.90 ... 0.95 (5 50)
Cind perioadele proprii de vibratie a doud moduri proprii succesive succesive se afla inrela[ia:
li*, ( 0.9 .T* (5 51)
adici diferenlS dintre perioadele proprii de vibra[ie este sub 10%, rispunsurile modale
respective se combind prin adunarea valorilor lor absolute pentru fiecare elementcomponent al sistemului (ABSSUM):
k+1' I
EE,k : 4 lEr,.;lJ=K
(5 52)
Dupd sumarea rdspunsurilor care se ,,confundd", sau nu mai sunt independente,
conform condi[iei (5.51) se aplici o relalie de suprapunere probabilisticd, cu includerea
acestora, pentru a se ob[ine rdspunsul maxim.
Un alt procedeu de suprapunere probabilistici este combinarea pitratici completi(COC - Completely Quadrat Combination):
(5 53)
in care pq reprezinta coeficientul de corelalie intre rdspunsurile modale pe modurile k gi
j gi are expresia:
s.(6r +r.€r).ffi.r3t2
r
Il-ii=1
(5 54)
I Ip-,'r,*'E'lk=1 j=1 ,l
166
Pjt =(1-rz)2 * 4. 6; . €x .r .(1+ r)2 + 4 Gl + \?),'

sau:
Sisfemul cu n garade de libeftate dinamicd supus acliunii serbmrce
6 gi €r sunt fracliunile din amortizarea criticd asociate modurilor proprii Tr gi l, iar r esteraportul perioadelor aferente celor doud moduri:
(5 55)
(5 56)
Coeficientul de corelatie p4 are valori cuprinse intre: 0 ( pii < 1 iar pentru k=j:
P* =1 (5 56)
In cazul in care fractiunea din amortizarea criticd se considerd aceeagi pentru toatemodurile proprii de vibratie:
??v
b1 - b2 -...- b
coeficientul de corela[ie pq dat de (5.54) devine:
8.\2.(t+r).r3/2(5 57)Pjr :
(1- r2)2 + 4. \2 ., . (1 + r)2
Varialia coeficientului de corelalie pu funcfie de raportul perioadelor proprii ale
sistemului r, pentru fracliuni din amortizarea criticd de 0.02,0.05 9i 0.10 estereprezentata in fig.5,5.
Pentru o fractiune de amortizarea critica de 5% gi valori ale raportului r al perioadelor
egale cu 0.9 coeficientul de corelafie este egal cu 0.473, iar pentru r = 1.11 rezultd
p=0.477.In aceste condi[ii coeficientul de la corelatia modald devine important. Mai
mult, astfel de moduri proprii de vibra{ie nu mai pot fi considerate independente 9i sesuprapun in valoare absolutd.
Se mentioneazi inci o dati ci toate suprapunerile (SRSS, CQC etc.) se aplicinumai efectelor, adicd asupra rdspunsului sistemului in eforturi, deplasdri, tensiuni 9ideforma[ii specifice 9i nu asupra actiunii.
Pentru un sistem dat semnele eforturilor, deplasdrilor, tensiunilor 9i deformaliilorspecifice, ce au fost ob{inute prin suprapunere modald, pot fi considerate identice cu
cele oblinute pentru modul fundamental de vibratie.
'167
r=II
ID;t-
{D1

lnginerie sercmicd
ffi
\=o'02
€=o'05
€=0'10
tlfi ilriil \ti i\ \t!!i r \
0 0,5 1 1.5 2 2.5 3
I
Fig,5.5 Varialia coeficientului de corelatie in functie de raportul perioadelor
5.s FORTA TATETOARE DE BAZA
lntrucdt analizele seismice ale structurilor cu nGLD se pot realiza prin decuplareasistemului de ecualii dinamice coform pcl5,2 gi pentru a accentua faptul cd rispunsul se
ob[ine independent pe fiecare mod propriu de vibralie, se propune stabilirea unui sistemcu lGLD echivalent pentru care se determind forfa seismici.
Forta seismicd a sistemului cu lGLD echivalent reprezinti fo(i tiietoare de baziaferentd sistemului cu nGLD, dupd care aceasti fo(d poate fi distribuiti pe direcliagradelor de libertate dinamicd acordate,
Analiza unui sistem structural la acliunea seismicd implicd cunoagterea rispunsuluimaxim care induce cea mai mare cantitate de energie, care evident va reprezenta ceamai mare stare de eforturi, deformalii, tensiuni sau deformatii specifice, pe modul
respectiv de oscilafie. In aceste condi[ii, pentru a oblinerea unui sistem echivalent cu
lGLD pentru sistemul cu nGLD, se pune condi[ia ca energie cineticd maximd 9irespectiv potenlialS maxima, dezvoltatd de ambele sisteme, in cadrul aceluiagi modpropriu de oscilalie i, sd fie identicd.
In fig.5.6 este reprezentat sistemul cu nGLD 9i respectiv sistemul cu lGLD echivalent,
care au aceeagi perioadd proprie de vibra[ie Ti gi respectiv aceeagi energie poten[iald 9icineticd.
168
-:<
1
0.9
0,8
0.7
0,6
0,5
0.4
0.3
0.2
0.1
0

Sisfemul cu n garade de libertate dinamicd supus acliunii seismice
Fig.5.6 Sistemul cu nGLD in modul i de oscila{ie (a.) 9i sistemul cu lGLD echivalent (b.)
Vom considera ci masa sistemului echivalent in modul i de oscila[ie mi'este egald cu
suma maselor sistemului cu nGLD afectatd de un coeficient denumit coeficient de
echivalen[6 e;cofespurzdtor aceluiagi mod propriu de vibra[ie i:
b.a.
mi = ', it*k=1
Energia cinetici a sistemuluicu nGLD pe modul i de oscila[ie:
Ec,i : 1 ir* ..b?, :* ir* .,,r1 .o?i -lri i*n .o?,' lk=1 lk=1 I k=1
Energia cinetici a sistemului cu lGLD echivalent pe modul i de oscila{ie:
E3,i = I^f ,bi'= |rf i.of'
Pundnd condi{ia ca cele doud cantita[i de energie sd fie egale rezultd:
(5 58)
(5 5e)
(5.60)
(5 61)
169
Ec,i : E3,i + ir*.0?i +ni.Ai2k=1

lnginerie ser.smicd
Energia poten[iala maximd a sistemului cu nGLD pe modul ide oscilatie:
(5 62)
unde cu Sa,i s-? notat valoarea spectrala a acceleratiei in condiliile rispunsului liniar
elastic al sistemului pentru modul i de vibralie, corespunzdtor unei anumite fracliuni din
amortizarea critic6.
Energia potenliali a sistemului cu lGLD echivalent:
Ep,i :iAo *- =;oi,,mr.rr*,.sa,i.Q*, :1t,,,4r*.rri .Qri
-4 1,Eep,i -tmi Su,i .Qi
iar din egalitatea celor doud energii date de (5.62) gi (5.63) rezultd:
n
Er-.n6.Qri {ni .0i
(5 63)
[E,'-n-t-')'
itr,oiik=1
(5 64)
(5 65)
(5 66)
i'*o?'k=1
sau inlocuind factorul de distribu[ie a rdspunsului pe direc[ia gradului de libertate k inmodul de vibra[ie i din (5.43') rezulta masa echivalentd aferentd de forma:
FAEp,i = E[,; =
Inlocuind (5.61) in (5.6a) rezulta:
Qi-
Arr]i :
n
ImxrliQr,ik=1
care inlocuit in (5.64) 9i tindnd seama de (5.58) conduce la:
'170
f i'*o*'l'mP _ \l(=1 /
In^ImkQfi
k=1
(5 67)

Sisfemul cu n garade de libeftate dinamicd supus acliuniiseismice
iar coeficientul de echivalenlS este:
(n \2I rmr,Qr,i
I\k:1 )
care are proprietatea:
n
I ti -1i=1
oi
(p.'-X=r,'-*e)(5.68)
(5.6e)
ce indicd cu cdt participd masa totald a sistemului la rispunsul fiecdrui mod propriu de
oscilalie in parte.
Fo(a seismici maximi, corespunzdtor domeniul liniar elastic, in modul i de oscilaliepe sistemul echivalent se ob[ine inmul[ind valoarea spectrald Sa,i cu masa sistemului
echivalent (5,58) corespunzdtoare aceluiagi mod:
Aceastd fo(6 poartd denumirea de forta tiietoare de bazi Fi a sistemului cu nGLD 9ipoate fi distribuitd pe direc[ia gradelor de libertate k astfel:
Fit : Sr,i 'mi : Sa,i ' ti[t*
Fk,i = dr,i 'Fit : dt,i 'I
in care inlocuind Fr,i din (5.48)9i Fi. din (5.70) rezultd:
mf 'rlfi 'Sa,i : dk,i 'Sa,i 'ui i mfk=1
Iri din (5.43') 9i eidin (5.68) rezulti:
n
IQi; 'm1
mr .Qri .51-.Sa,i : dk,i .Su,i
IQf; 'm*k=1
(5.70)
(5.71)
(5.72)
(n \2I ImrQri
I\k=1 )
[-i'-)(a'-q)
n
Imr< (5 73)
k=1
171

sau:
din care rezult6:
n
mpQ1.; = dk,i .E*nQ*'
dk,i =rT]r .(Dt,i
n
)lTlr.Qr,i
lnginerie serbmrcd
(5.73')
(5.72)
9i reprezintd coeficientul de distributie al forfei sismice pe direclia gradelor de
libertate dinamicd k acordate, fig.5.7.
Aceastd modalitate de abordare a calculului poartd denumirea de metoda indirecti decafcuf a fortelor seismice prin care se calculeazd fofia seismici totali sau forfatiietoare de bazi in modul propriu de oscilalie i, prin intermediul masei echivalente m.r,
dupd care se determind for{ele seismice pe direc[ia fiecirui grad de libertate dinamicd kprin distribulie cu relalia (5.72).
a. b.
Fig.5.7 Fo(a tiietoare de bazi determinatd pe sistemul echivalent (a.)
gi distribulia pe sistemul cu nGLD (b.)
172


















