by B. Mohamadi and O. Pironneau (Oxford University Press Fall … · 2017-05-09 · t realistic...
23
by B. Mohamadi and O. Pironneau (Oxford University Press Fall 2000)
Transcript of by B. Mohamadi and O. Pironneau (Oxford University Press Fall … · 2017-05-09 · t realistic...

1
Applied shape optimization for uids
Preface
Nowadays the art of computer sim ulation has reached somematurity;and even for yet unsolved problems engineers ha ve learned to extractmeaningful answ ers and trends for their design from rough sim ula-tions: numerical sim ulation is one of the tools on which intuition canrely! Yet for those who want to study trends and sensitivities morerationally the tools of automatic di�eren tiation and optimization arethere. This book deals with them and their application to the designof the systems of uid mec hanics. But brute force optimization istoo often an ine�cien t approach and so our goal is not only to recallsome of the tools but also to show how they can be used with somesubtlety in an optimal design program.
On the application side, this book deals with shape optimizationproblems for uids and it also includes some aspects of optimiza-tion under uid and structure coupling. These problems are of greatpractical importance in computational uid dynamics (CFD) for air-planes, cars, turbines, and man y other industrial applications.
Optimal shape design (OSD) has receiv ed considerable attention al-ready. It has become vast enough to branch into several disciplines:on the theoretical side man y results deal with the existence of so-lutions to the problem or its relaxed form, on the practical sidetopological shape optimization which solves numerically the relaxedproblem or b y local shape variation as carried out in this book. Be-cause this book deals with uid ow optimization w e will not presentthe tools of topological optimization. Let us w arn our potential read-ers that in man y other aspects also the book is more a collection ofcase studies than a synthesis; it builds on known materials but itdoes not present these materials in a syn thetic form for the simplereason of size and time, as the task of doing a survey would be some-what formidable. The main application w e had in mind deals withfull airplane shape optimization; so the uid is modeled by the fullNavier-Stokes equations with a turbulence model. It is nearly im-possible to compute the exact derivatives of the �nite dimensionalapproximations of theses equations with respect to shape and meshmotion, therefore w e needed to use automatic di�eren tiation (AD)of programs.
by B. Mohamadi and O. Pironneau (Oxford University Press Fall 2000)

2
So the book begins with a chapter on optimal shape design by localshape variations for simple linear problems, discretized by the �niteelement method. The goal is to provide tools to do the same with thecomplex partial di�erential equations of CFD. A general presentationof optimal shape design problems and of their solution by gradientalgorithms is given. In particular, the existence of solutions, sensi-tivity analysis at the continuous and discrete levels are discussed,and the implementation problems for each cases are pointed out.This chapter is therefore an introduction to the rest of the book. Itsummarizes the current knowhow for OSD, except topological opti-mization as well as global optimization methods such as evolutionaryalgorithms.
In Chapter 2 the equations of uid dynamics are recalled, togetherwith the k � " turbulence model, which is used later on for highReynolds number ows. The fundamental equations of uid dynam-ics are recalled; this is because applied OSD for uids requires agood understanding of the state equation: Euler and Navier-Stokesequations in our case, with and without turbulence models togetherwith the inviscid and/or incompressible limits. The k � " model ispresented brie y with wall-laws. The domain of validity of the modelis also recalled. We explain why wall-laws are potentially better forOSD than low-Reynolds number models. The wall-laws presented in-clude pressure correction for separated ows and extension for com-preesible ows for both adiabatic and isothermal walls. It is inter-esting to notice that the large eddy simulation approach is giving anew life to the wall-function approach, as there is no hope to sim-ulate high-Reynolds ows up to the wall with LES. Of course, bywall-laws we understand domain decomposition with a reduced di-mension model near the wall. In other word, there is no universalwall-laws and when using a wall-function, it needs to be compatiblewith the model used far from the wall.
Chapter 3 deals with the numerical methods that will be used forthe ow solvers. As in most commercial and industrial packages, un-structured meshes with automatic mesh generation and adaptationare used together with �nite volume or �nite element discretizationfor these complex geometries. The iterative solvers and the ux func-tions for upwinding are also presented here.
Then in Chapter 4 automatic di�erentiation is presented. First thetheory, then a home-made C++ class for AD by operator overload-ing, and �nally our experience with Odyss�ee, another AD system us-ing code generation operating in both direct and reverse modes. Asstated earlier, sensitivity analysis and computation of derivatives are

3
major problems in design in general and in OSD in particular. Chap-ter 4 describes di�erent methods for the evaluation of the gradientsof cost function and constraints: �nite-di�erence, complex variablemethod, direct linearization, and the adjoint method. Advantagesand drawbacks of each approach are given. In our opinion, AD hasgiven new life to gradient-based methods. We describe the di�erentpossibilities and through simple programs give a comprehensive sur-vey of direct AD by operator overloading and for the reverse mode,the adjoint code method used in Adol-C, Adifor, and Odyss�ee.
Chapter 5 presents several acceleration procedures that will allowthree dimensional optimization with turbulent ows to be carriedout on moderate size computers and even on work-stations. Theproblem of choice of the parameters, the approximations of gradi-ents and the remeshing are discussed there. Implementation issuesare important if we want an e�cient optimization "platform". We de-scribe di�erent strategies for shape deformation within and without(CAD-Free) computed aided design data structures during optimiza-tion. For time-dependent problems, we discuss the pros and the consof injection/suction boundary conditions equivalent to moving ge-ometries when the motion is small. We present some optimizationalgorithms used in our optimization loop and the dynamical sys-tem analogy. The presentation is not intended to be exhaustive butrather re ects our practical experience. We show that this formula-tion is suitable for multi-physics problems where a coupling betweendi�erent models is necessary. In addition, we see that the dynami-cal system approach is natural with incomplete sensitivity and stateevaluations. By incomplete sensitivity we mean that only the defor-mation of the geometry is accounted for and the change of the statevariable due to the change of geometry is ignored. We show by ex-perience that the accuracy is su�cient for quasi-Newton algorithmsand also that the complexity of the method is drastically reduced.Some strategies to couple mesh adaptation and the shape optimiza-tion loop are presented. The aim is to obtain a multi-grid e�ect andimprove convergence.
In Chapter 6 we put forward a general argument to support theuse of approximate gradients within optimization loops integratedwith mesh re�nements. Although this does not justify all the proce-dures that are presented in Chapter 5, it throws some light on whythey work. We prove also that smoothers are essential. This part wasdone in collaboration with E. Polak and N. Dicesare.
Finally, the book closes with the presentation of many applicationsfor stationary ows in Chapter 7 and unsteady problems in Chapter

4
8. We gather in Chapter 7 examples of shape optimization in twoand three space dimensions using the tools presented above for bothinviscid and viscous turbulent cases, for ow Mach number rangingfrom 0 to 20. Chapter 8 presents applications of our shape opti-mization algorithms to cases where the ow is unsteady for rigidand elastic bodies and shows that control problems and OSD prob-lems are particular cases of a general approach. Closed loop controlalgorithms are presented together with an analogy with dynamicalsystems. The aim here is to present realistic "active control" exam-ples, with injection and suction devices for drag reduction.
The selection of this material corresponds to what we think to be agood compromise between complexity and accuracy for the numericalsimulation of nonlinear industrial problems, keeping in mind practi-cal aspects at each level of the development, illustrating our proposal,with many practical examples which we have gathered during sev-eral industrial cooperations. In particular, the concepts are explainedmore intuitively than with complete mathematical rigor. Thus thisbook should be important for whoever wishes to solve a practicalOSD problem. In addition to the classical mathematical approach,the application of some modern techniques such as automatic di�er-entiation and unstructured mesh adaptation to OSD are presented,and multi-model con�gurations and some time-dependent shape op-timization problems are discussed.
The book has been in uenced by the reactions of students who havebeen taught this material twice at the Master level at the Univer-sity of Paris. We think that what follows will be particularly usefulfor engineers interested in the implementation and solution of opti-mization problems using commercial packages, or in-house solvers,graduate and Ph.D. students in applied mathematics, aerospace, ormechanical engineering needing, during their training and research,to understand and solve design problems and research scientists inapplied mathematics, uid dynamics and CFD looking for new excit-ing research and development areas involving realistic applications.

5
Acknowledgments
The authors are grateful to P. Aubert, A. Baron, N. Dicesar �e, G.Medic, M. Stanciu, N. P etruzzelli, G. Puigt, F. Hec ht, and E. Polakfor their contributions in the form of scien ti�c material publishedelsewhere in collaboration with us.
For their encouragemen t and sharing of ideas the authors wouldlike to thank A. Dervieux, C. Farhat, M. Giles, R. Glo winski, M.Gunzburger, W. Habashi, M. Hafez, H. Kawarada, P. Le Tallec,J.L. Lions, P. Moin, M. Na von, P. Neittanmaaki, J. P eriaux andB. Perthame.
W e thank also our colleagues at the universities of Mon tpellier IIand Paris VI and at INRIA, for their comments on di�erent pointsrelated to this work, namely: H. A ttouch, B. Koobus, P. Redont, M.Cuer, M. O. Bristeau, J. F. Bourgat, A. Hassim, P.L. George, A.Marrocco, P. Frey, P. Laug, M. Vidrascu, E. Saltel, S. Lan teri, A.Desideri, E. Laporte,
W e are also very happy to acknowledge the contributions of our in-dustrial partners personi�ed by MM. Du�a, Pirotais, Galais, Canton-Desmeuzes, at CEA-CEST A. MM. Stou�et, Mallet, Rostand, Rog�e,Dinh at Dassault Aviation, MM. Cormery at Aerospatiale-Matra, M.D. Laurence at EDF. MM. J. Cousteix and P . Sagaut at Onera andM. S. Moreau at V aleo.
Finally, considerable help was given to us by the automatic di�eren-tiation specialists and especially by C. Bishof, C. Faure, P. Hovland,N. Rostaing, A. Griew ank and J.C. Gilbert

Contents
1. Optimal shape design
1.1 Introduction1.2 Examples
1.2.1 Minimum weight of structures1.2.2 Wing drag optimization1.2.3 Synthetic jets and riblets1.2.4 Stealth wings1.2.5 Optimization of a stealth wing1.2.6 Optimal breakw ater1.2.7 Two academic test cases: nozzle optimization
1.3 Existence of solutions1.3.1 Topological optimization1.3.2 Su�cien t conditions for existence
1.4 Solution by optimization methods1.4.1 Gradient methods1.4.2 Newton methods1.4.3 Constraints1.4.4 A constrained optimization algorithm
1.5 Sensitivity analysis1.5.1 Sensitivity analysis for the nozzle problem1.6 Discretization with triangular elements1.6.1 Sensitivity of the discrete problem
1.7 Numerical issues1.7.1 Implem entation problems1.7.2 Independence from the cost function1.7.3 Addition of geometrical constraints1.7.4 Automatic Di�eren tiation
1.8 Appendix: Optimal Design for Na vier-Stokes ows1.8.1 Optimal shape design for Stokes ows1.8.2 Optimal shape design for Na vier-Stokes ows
Bibliography
2. Partial di�erential equations for uids
2.1 Introduction2.2 The Navier-Stokes equations
2.2.1 Conservation of mass2.2.2 Conservation of momentum2.2.3 Conservation of energy and the law of state
2.3 Inviscid ows2.4 Incompressible ows2.5 Potential ows2.6 Turbulence modeling

2.6.1 The Reynolds number2.6.2 Reynolds Equations2.6.3 The k � " model
2.7 Equations for compressible ows in conservation form2.7.1 Boundary and initial conditions
2.8 Wall-laws2.8.1 Generalized wall functions for u
2.8.2 Wall function for the temperature - energy equation2.8.3 k and "
2.9 Appendix 1: Generalized wall functions2.9.1 Pressure correction2.9.2 Corrections on adiabatic walls for compressible
ows2.9.3 Prescribing �w2.9.4 Correction for Reichardt law
2.10 Appendix 2: wall functions for isothermal wallsBibliography
3. Some numerical methods for uids and examples
3.1 Introduction3.2 Numerical methods for compressible ows
3.2.1 A FEM-FVM discretization3.2.2 Approximation of the convection uxes3.2.3 Accuracy improvement3.2.4 Positivity3.2.5 Time integration3.2.6 Local time stepping procedure3.2.7 Implementation of the boundary conditions3.2.8 Solid walls: transpiration boundary condition3.2.9 Solid walls: implementation of wall-laws
3.3 Incompressible ows3.3.1 Solution by a projection scheme3.3.2 Spatial discretization3.3.3 Local time stepping3.3.4 Numerical approximations for the k� " equations
3.4 Some simulations of the direct problem3.4.1 Flow over a backward step3.4.2 Transonic ow over a RAE28223.4.3 Flow over a square cylinder3.4.4 Flow over a circular cylinder3.4.5 Flow over a circular-arc airfoil3.4.6 Stall prediction at low speed3.4.7 Flow over an adiabatic expansion ramp3.4.8 Flow over an isothermal compression ramp
3.5 Appendix: Wall-law subroutine

Bibliography
4. Automatic di�erentiation
4.1 Introduction4.2 Computations of derivatives
4.2.1 Finite di�erences4.2.2 Complex variables method4.2.3 State equation linearization4.2.4 Adjoint method4.2.5 Adjoint method and Lagrange multipliers4.2.6 Automatic di�erentiation4.2.7 A Class library for the direct mode
4.3 Nonlinear PDE and AD4.4 A simple inverse problem4.5 A shock problem solved by AD
4.5.1 A simple example R! R2! R
4.5.2 DO - IF4.5.3 Nested loops4.5.4 Interprocedural di�erentiation
4.6 Appendix 1: Odyss�ee automatic di�erentiator4.7 Appendix 2: Direct and reverse modes of AD4.8 Appendix 3: More on FAD classesBibliography
5. Optimization platform and implementation issues
5.1 Introduction5.2 Shape parameterization and shape and mesh deformation
tools5.2.1 CAD-based5.2.2 Basis of shape functions5.2.3 CAD-free
5.3 Handing domain deformations5.3.1 Explicit deformation5.3.2 Adding an elliptic system5.3.3 Injection boundary condition5.3.4 Geometrical constraints
5.4 Minimization algorithms5.4.1 State equations
5.4.2 Pseudo-unsteady control and optimization algorithm5.4.3 More sophisticated pseudo-unsteady systems5.4.4 Interior point algorithms
5.5 E�ciency with AD5.5.1 Limitations when using AD5.5.2 Storage strategies5.5.3 Keys points when using AD5.6 Incomplete sensitivities and boundary integrals

5.6.1 Incomplete sensitivities and equivalent boundarycondition
5.6.2 Incomplete gradient: application to advection-di�usion equation
5.6.3 Incomplete gradient: application to channel ows5.6.4 Incomplete sensitivities: time-dependent phenomena
5.6.5 Newton law: pressure distribution prediction forblu� bodies
5.6.6 General formulation and validity domain5.6.7 Multi-level construction5.6.8 Back to �nite di�erences or complex variables
method5.6.9 Coupled con�gurations5.6.10 Incomplete sensitivities and the Hessian5.6.11 Rede�nition of cost functions
5.7 Mesh adaptation and optimization5.7.1 Delaunay mesh generator5.7.2 Metric de�nition5.7.3 Adaptive optimization algorithm
Bibliography
6. Consistent approximations and approximate gra-
dients
6.1 Generalities6.2 Consistent approximations
6.2.1 Consistent approximation6.3 Application to a control problem
6.3.1 Veri�cation of the hypothesis6.3.2 Numerical example
6.4 Application to optimal shape design6.4.1 Problem statement6.4.2 Discretization6.4.3 Optimality Conditions: the continuous case6.4.4 Optimality Conditions: the discrete case6.4.5 De�nition of �h6.4.6 Implementation trick6.4.7 Orientation6.4.8 Numerical example6.4.9 A nozzle optimization6.4.10 Numerical results6.4.11 Drag reduction for an airfoil
6.5 Approximate gradients6.5.1 A control problem with domain decomposition6.5.2 Numerical results
6.6 Conclusion

6.7 Appendix6.7.1 Veri�cation of the hypothesis of Theorem 16.7.2 Inclusion6.7.3 Continuity6.7.4 Consistency6.7.5 Continuity of �6.7.6 Continuity of �h(�h)6.7.7 Convergence
Bibliography
7. Numerical results on shape optimization
7.1 Introduction7.2 Drag reduction for a supersonic ow7.3 4-element airfoil optimization7.4 Transonic turbulent ow7.5 Shape optimization at high speed7.6 Heat transfer optimization7.7 Sonic boom reduction7.8 Blade cascade7.9 3D inviscid wave-drag reduction for a wing7.10 Drag reduction for a transonic business jet7.11 Aerodynamic stability improvement7.12 Supersonic business jetBibliography
8. Numerical results on shape optimization for un-
steady ows
8.1 Introduction8.2 Control of ows around rigid bodies
8.2.1 Flow control behind a cylinder8.2.2 Bu�eting control over a RA 16
8.3 Control in multi-disciplinary context8.4 ODE based models for the Structure8.5 Structural model for the elastic CAD-Free parameter-
ization8.6 Fluid models8.7 Coupling strategies8.7.1 First order explicit coupling8.7.2 First order implicit coupling8.7.3 First order semi-implicit coupling8.7.4 Second order implicit coupling8.7.5 Second order coupling with prediction
8.8 Time dependent minimization problem8.8.1 Second order dynamic system8.8.2 Coupling the control and state equations
8.9 Sensitivity analysis by CVM

8.9.1 CVM sensitivit y to the incremen t8.10 Control of aeroelastic instabilities8.11 Using more sophisticated uid models
8.11.1 2D Aeroelastic con trol with stable asymptoticbehavior
8.11.2 2D Aeroelastic con trol with unstable asymptoticbehavior
8.11.3 3D Aeroelastic con trolBibliography

7
1
Optimal shape design
1.1 Introduction
In mathematical terms, an optimal shape design requires the opti-mization to one or several criteria fEi(x)gI1 which depend on designparameters x 2 X which de�ne the shape of the system within theadmissible set of values X.Multi-criteria. Optimization is a di�cult �eld in itself of which weshall retain only the min-max idea,
minx2X
fJ(x) : Ei(x) � J(x); i = 1; :::; Ig
and the Pareto minimization
minx2X
IXi=1
�iEi(x):
For some suitable values of �i 2 (0; 1), both problems are equivalentand solve in some intuitive sense the multi-criteria problem. Standardoptimization and control theory is applied to these derived problems.Optimal control for distributed systems is a branch of optimizationfor problems which involve a parameter or control variable u, a statevariable y and a partial di�erential equation A (with boundary con-ditions b), to de�ne y in a domain :
minufJ(u; y) : A(x; y; u) = 0 8x 2 ; b(x; y; u) = 0 8x 2 @g:
For example,
minufZ(y � 1)2 : ��y = 0 8x 2 ; yj@ = ug (1.1)
attempts to �nd a boundary condition u for which y would be asclose to the value 1 as possible.For (1.1) there is a trivial solution u = 1 because then y = 1 is thesolution to the Laplace equation.Optimal shape design is a special case of control theory where thecontrol is the boundary @ itself. For example, ifD is given, consider
minf@;D�g
fZD(y � 1)2 : ��y = g; yj@ = 0g: (1.2)
This problem has a physical meaning [39], it answers the following: isit possible to build a support for a membrane bent by its own weight

8
(g = �9:81) which would bring its de ection as close to 1 as possiblein a region of space D.The intuitive answer is no unless D is a singular set, and we see itmathematically by noting that y + g x
2
2 is an analytical function andso if it is 1 in D it must be 1 everywhere; but then this fact is notcompatible with the boundary conditions for non-singular set .Thus the existence, uniqueness, and regularity of solution can be aproblem even in simple cases.In smooth situations, the PDE can be viewed as an implicit mapu ! (u) ! y(u) where u ! (u) is the parameterization of thedomain by a (control) parameter u and the problem is to minimizethe function J(u; y(u)). If it is continuously di�erentiable in u, thenthe algorithms of di�erentiable optimization can be used (see [38] forinstance) and so it remains only to explain how to compute J 0u.Analytic computation of derivatives for OSD problems is possibleboth for the continuous and the discretized problems. It may betedious but it is usually possible. When it is di�cult one may turnto automatic di�erentiation (AD), but then other di�culties pop upand so it is a good idea to understand the theory even when usingAD.Therefore we begin this chapter by giving simple examples of OSDproblems. Then we recall some theorems of existence of solutionsand give for simple cases a method to derive optimality conditions.Finally, we show the same on OSD problems discretized by the �niteelement method of degree one on triangulations. More details can befound in [12, 37, 35, 24].
1.2 Examples
1.2.1 Minimum weight of structures
In 2D linear elasticity, for a structure clamped on � = @, andsubject to volume forces F , the vertical displacement u = (u1; u2) 2V is found by solving:
Z�ij(u)�ij(v) =
ZF:v 8v 2 V0 = fu 2 H1()2 : uj� = 0g
where �ij(u) =1
2(@iuj + @jui); and0
B@�11�22�12
1CA =
0B@2� + � � 0� 2� + � 00 0 2�
1CA0B@�11�22�12
1CA
and where �; � are the Lam�e coe�cients.Many important problems of design arise when one wants to �ndthe structure with minimum weight yet satisfying some inequalityconstraints for the stress such as in the design of light weight beams

EXAMPLES 9
for strengthening an airplane oors, or for crank shaft weight opti-mization.For all these problems the criteria for optimization is the weight
J() =Z�;
where � is the density of the material. But there are constraints ofthe type
� (x) � d(x) < �dmax
at some points x and for some directions d(x).Indeed, a wing, for instance, needs to have a di�erent response tostress span-wise and chord-wise. Moreover, due to coupling betweenphysical phenomena, the surface stresses come in part from uidforces acting on the wing. This implies many additional constraintson the aerodynamic (drag, lift, moment) and structural (Lam�e coef-�cients) characteristics of the wing. Therefore, the Lam�e equationsof the structure must be coupled with the equations for the uid( uid structure interactions). This is why most optimization prob-lems nowadays require the solution of several state equations, uidand structure in this example.
1.2.2 Wing drag optimization
An important industrial problem is the optimization of the shape ofa wing to reduce the drag. The drag is the reaction of the ow onthe wing; its component in the direction of ight is the drag properand the rest is the lift. A few percent of drag optimization means agreat saving on commercial airplanes.For viscous drag the Navier-Stokes equations must be used. For wavedrag the Euler system is su�cient.For a wing S moving at constant speed u1 the force acting on thewing is
F =ZS[�(ru+ruT )�
2�
3r:u]n�
ZSpn
where n is the normal to S pointing outside the domain occupied bythe uid.The �rst integral is a viscous force, the so-called viscous drag/lift,and the second is called the wave drag/lift. In a frame attached to thewing, and with uniform ow at in�nity, the drag is the componentof F parallel to the velocity at in�nity (i.e. F:u1). The viscosity ofthe uid is � and p is its pressure.The Navier-Stokes equations govern u the uid velocity, � the tem-perature, � the density and E the energy:
@t�+r:(�u) = 0

10
@t(�u) +r:(�u u) +rp� ��u�1
3�r(r:u) = 0;
@t[�E] +r � [u�E] +r � (pu)
= r � f�r�+ [�(ru+ruT)�2
3�)Ir � u]ug
where E =u2
2+ � p = ( � 1)��:
The problem is to minimize
J(S) = F:u1
with respect to the shape of S.There are several constraints:
� A geometrical constraint such as the volume being greater thana given value, else the solution will be a point.
� An aerodynamic constraint: the lift must be greater than agiven value or the wing will not y.
The problem is di�cult because it involves the Navier-Stokes equa-tions at high Reynolds number. It can be simpli�ed by consideringonly the wave drag, i.e. the pressure term only in the de�nition ofF [27]. Then the viscous terms can be dropped in the Navier-Stokesequations (� = � = 0); Euler's equations remain.However, there may be side e�ects to such simpli�cations. In tran-sonic regimes, for instance, the shock position for a Navier-Stokes ow is upstream compared to an inviscid (Euler) simulation at thesame Mach number. Figs. (1.1,-1.7) display the results of two opti-mizations using Euler equations and a Navier-Stokes equations withk � " turbulence modeling for a NACA 0012 at Mach number of0.75 and 2 degrees of incidence. The cost function involves the dragcoe�cient Cd, the lift coe�cient Cl and the area "Vol" of the wingpro�le (see Chapter 6):
J(S) =Cd
C0d
+ 0:05jCl �C0
l j
C0l
+ 0:1jVol�Vol0j
Vol0:
Simplifying the state equationAssuming irrotational ow an even greater simpli�cation replaces theEuler equations by the compressible potential equation:
u = r'; � = (1 � jr'j2)1=( �1); p = � ; r:(�u) = 0:
Or even, if at low Mach number, by the incompressible potential owequation:
u = r'; ��' = 0: (1.3)

EXAMPLES 11
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
-1 -0.5 0 0.5 1 1.5 2X/Chord
Iso-Mach on initial shape - inviscid
Fig. 1.1. Transonic drag reduction. Initial iso-Mach contours forthe inviscid simulation.
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
-1 -0.5 0 0.5 1 1.5 2X/Chord
Iso-Mach on initial shape - viscous turbulent
Fig. 1.2. Transonic drag reduction. Initial iso-Mach contours forthe viscous simulation.
The pressure is given by the Bernoulli law p = pref�12u
2 and so onlyan optimization of the lift would be :
minS2G
f�ZSf(u2
2)n � u1 : subject to (1.3) and
@�
@nj��S = u1 � n;
@�
@njS = 0g

12
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
-1 -0.5 0 0.5 1 1.5 2X/Chord
Iso-Mach on optimized shape - inviscid
Fig. 1.3. Transonic drag reduction. Iso-Mach contours for the in-viscid simulation after optimization.
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
-1 -0.5 0 0.5 1 1.5 2X/Chord
Iso-Mach on optimized shape - viscous turbulent
Fig. 1.4. Transonic drag reduction. Iso-Mach contours for the vis-cous simulation after optimization.
for some admissible set of shapes G and some local criteria f .
Multi-point optimizationEngineering constraints on admissible shapes are numerous:
� Minimal thickness, given length.
� Maximum admissible radius of curvature.

EXAMPLES 13
-1.5
-1
-0.5
0
0.5
1
1.5
2
-0.4 -0.2 0 0.2 0.4X/Chord
Pressure coefficient
’Initial inviscid’’Initial viscous turbulent’
’Optimized inviscid’’Optimized viscous turbulent’
Fig. 1.5. Transonic drag reduction. Pressure coe�cient.
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
-0.4 -0.2 0 0.2 0.4X/Chord
Initial and final shapes
’Initial’’Optimized with inviscid state’
’Optimized with viscous turbulent state’
Fig. 1.6. Transonic drag reduction. Initial and �nal shapes for theinviscid and viscous optimizations. The di�erences between thetwo shapes increase with the deviation between the shock posi-tions.
� Minimal angle at the trailing edge.
Another problem arises due to instability of optimal shapes with re-spect to data. It has been seen that the leading edge at the optimumis a wedge. Thus if the incidence angle for u1 is changed the so-lution becomes bad. A multi-point functional must be used in the

14
0
0.002
0.004
0.006
0.008
0.01
0.012
0 20 40 60 80 100Dynamic optimization iterations with incomplete sensitivities
Convergence history for |dJ/dx|
’Optimization with viscous turbulent state’’Optimization with inviscid state’
Fig. 1.7. Transonic drag reduction. Convergence histories for thegradients using the inviscid and viscous ows. The convergenceseems to be more regular for the viscous ow: with a robustsolver for the turbulence model, optimization is actually easierthan with the Euler equations. Of course, the CPU time is largerbecause the viscous case requires a �ner mesh.
optimization:minSJ(S) =
X�iu
i1 � F
i;
orminJ : ui1 � F
i � J 8i
at given lifts where the F i are computed from the Navier-Stokesequations with boundary conditions u = ui1; ujS = 0.
1.2.3 Synthetic jets and riblets
The solution to a time-dependent optimization problem is time de-pendent. But for wings this would give a deformable shape, withmotion at the time scale of the turbulence in (1.3). As this is com-putationally unreachable, suboptimal solutions may be searched.One direction is to replace moving surfaces by mean surfaces whichcan \transpire". For instance, consider a surface with tiny holes eachconnected to a rubber reservoir activated by an electronic devicecapable therefore of blowing and sucking air so long as the net owis zero over a period. The reservoir may be ignored and the meansurface may be considered with a \transpiration condition". Thistopic is currently being investigated [31, 18, 32].In the class of time-independent shapes with time-dependent owsit is not even clear that the solution is smooth. In [31], the authors

EXAMPLES 15
showed that ribblets, little groves in the direction of the ow, actuallyreduce the drag by a few percent. The simulation was done with alarge eddy simulation (LES) model for the turbulence and at thetime of writing this book shape optimization with LES is beyondour computational power. But this is certainly an important researcharea for the future.
1.2.4 Stealth wings
Maxwell equationsThe optimization of the far-�eld energy of a radar wave re ected byan airplane in ight requires the solution of Maxwell's equations forthe electric �eld E and the magnetic �eld H:
�@tE +r�H = 0 r:E = 0; �@tH �r� E = 0 r:H = 0:
The electric and magnetic coe�cients �; � are constant in air but notso in an absorbing medium. One variable, H for instance, can beeliminated by di�erentiating in t the �rst equation:
�@ttE +r� (1
�r� E) = 0:
It is easy to see that r:E = 0 if it is zero at initial time.
Helmholtz equationNow if the geometry is cylindrical with axis z and if E = (0; 0; Ez)T
then the equation becomes a scalar wave equation for Ez. Further-more, if the boundary conditions are periodic in time at in�nity,Ez = Rev1e
i!t and compatible with the initial conditions then thesolution has the form Ez = Rev(x)ei!t where v, the amplitude of thewave Ez of frequency ! , is solution of:
r(�1
�rv) + !2�v = 0: (1.4)
Remark 1.1
� Notice the wrong sign for ellipticity in the "Helmholtz" equa-tion (1.4).
� This equation arises in acoustics also.
� In vacuum �� = c2, c the speed of light, so for numericalpurposes it is a good idea to rescale the equation. The crit-ical parameter is then the number of waves on the object, i.e.!c=(2�L) where L is the size of the object.
Boundary conditionsThe re ected signal on solid boundaries S satis�es
v = 0 or @nv = 0 on S
depending on the type of waves (transverse magnetic polarizationrequires Dirichlet condition).

16
When there is no scattering object this Helmholtz equation has asimple sinusoidal set of solutions which we call v1:
v1(x) = � sin(k � x) + � cos(k � x)
where k is any vector of modulus jkj = !c. Radar waves are morecomplex, but by Fourier decomposition they can be viewed as a linearcombination of such simple unidirectional traveling waves.Now if such a wave is sent onto an object, it is re ected by it and thesignal at in�nity is the sum of the original wave with the re ectedwave. So it is better to set an equation for the re ected wave onlyu = v � v1.A good boundary condition for u is di�cult to set; one possibility is
@nu+ iau = 0:
Indeed, when u = eid�x, @nu+iau = i(d�n+a)u, so that this boundarycondition is "transparent" to waves of direction d when a = �d � n.If we want this boundary condition to let all outgoing waves pass theboundary, we will set a = �ik � n.To summarize, we set for u the system in the complex plane:
r � (1
�ru) + !2u = 0; in ;
@nu� ik � nu = 0 on �1
u = g � �eik�x on S:
where @ = S [ �1. It can be shown that the solution exists andis unique. Notice that the variables have been rescaled, ! is !c, � is�=�vacuum.Usually the criteria for optimization is a minimum amplitude for there ected signal in a region of space D at in�nity (hence D is anangular sector). For instance, one can consider
minS2O
fZ�1\D
jruj2 : !2u+r � (1
�ru) = 0; (1.5)
ujS = g; (�ik � nu+ @nu)j�1 = 0g
In practice � is di�erent from 1 only in a region very near S so as tomodel the absorbing paint that most stealth airplanes have.But constraints are aerodynamic as well, lift above a given lowerlimit for instance, and thus require the solution of the uid part aswell. The design variables are:
� The shape of the wing;
� The thickness of the paint;
� The material characteristics (�; �) of the paint.

EXAMPLES 17
Here again, the theoretical complexity of the problem can be appre-ciated from the following question:Would ribblets on the wing, of the size of the radar wave, improvethe design?Homogenization can answer the question [1, 9, 8]; it shows that anoscillatory design is indeed better. Furthermore, periodic surface ir-regularities are equivalent, in the far �eld, to new e�ective boundaryconditions:
u = 0 on an oscillatory S� can be replaced by
au+ @nu = 0 on a mean S
for some suitable a [2].If that is so then the optimization can be done with respect to aonly. But optimization with respect to the parameters of the PDE isknown to generate oscillations [43]; this topic is known as topologicaloptimization (see below).Optimization with respect to � gives also rise to complex compositestructure design problems.So an aerodynamic constraint on the lift has been added. The ow isassumed inviscid and irrotational and computed by a stream-function :
u = r� ; p = pref �u2
2; � = 0 in ;
jS = � j�1 =�cos �sin �
�� n;
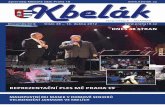
where u; p are the velocity and pressure in the ow, S is the wingpro�le, � its angle of incidence, n its normal. The constant � isadjusted so that the pressure is continuous at the trailing edge [14].The lift being proportional to � we impose the constraint � � �0 thelift of the NACA0012 airfoil. The result after optimization is shownon Fig. 1.9.
1.2.5 Optimization of a stealth wing
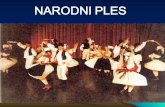
Problem (1.5) has been described in section 1.2.4. The problem isthat without constraint the solution is very unaerodynamic (see Fig.1.8).
1.2.6 Optimal breakwater
Here the problem is to build a good harbor by designing an optimalbreakwater. As a �rst approximation, the amplitude of sea wavessatis�es the Helmholtz equation
r(� � ru) + �u = 0; (1.6)
where � is a function of the water depth and � is function of the wavespeed.

18
MODULEF : F.J. Baron LopezFINAL DIFF. WAVE; NO CONSTRAINTS. 27/05/93
mail2.sd
coor2.sd
b2.sd
12285 POINTS
12285 NOEUDS
24110 ELEMENTS
24110 TRIANGLES
INCONNUE : 1 MNEMO :VN
20 1.100
19 0.9842
18 0.8684
17 0.7526
16 0.6368
15 0.5211
14 0.4053
13 0.2895
12 0.1737
11 5.7895E-02
10 -5.7895E-02
9 -0.1737
8 -0.2895
7 -0.4053
6 -0.5211
5 -0.6368
4 -0.7526
3 -0.8684
2 -0.9842
1 -1.100
20 ISOVALEURS
Fig. 1.8. Stealth wing. Optimization without aerodynamical con-straint (Courtesy of A. Baron).
MODULEF : F.J. Baron LopezFINAL DIFF. WAVE; CONSTRAINED 27/05/93
mail2.sd
coor2.sd
b2.sd
11261 POINTS
11261 NOEUDS
22082 ELEMENTS
22082 TRIANGLES
INCONNUE : 1 MNEMO :VN
20 1.100
19 0.9842
18 0.8684
17 0.7526
16 0.6368
15 0.5211
14 0.4053
13 0.2895
12 0.1737
11 5.7895E-02
10 -5.7895E-02
9 -0.1737
8 -0.2895
7 -0.4053
6 -0.5211
5 -0.6368
4 -0.7526
3 -0.8684
2 -0.9842
1 -1.100
20 ISOVALEURS
Fig. 1.9. Stealth wing. Optimization with aerodynamical con-straint (Courtesy of A. Baron).