Breathing of Humans and its Simulation · 2.2.2 Measurement Techniques of the Human Ventilation . ....
70
Breathing of Humans and its Simulation Mina Nishi LSTM-Erlangen Institute of Fluid Mechanics Friedlich-Alexander-University Erlangen-Nuremberg Cauerstr.4, D-91058 Erlangen June 14, 2004
Transcript of Breathing of Humans and its Simulation · 2.2.2 Measurement Techniques of the Human Ventilation . ....

Breathing of Humans and its Simulation
Mina Nishi
LSTM-Erlangen
Institute of Fluid Mechanics
Friedlich-Alexander-University Erlangen-Nuremberg
Cauerstr.4, D-91058 Erlangen
June 14, 2004

Abstract
In this thesis, a breathing flow rate monitoring system and a mechanical breathing
simulator are developed, constructed and tested for the experimental investiga-
tion of human breathing.
Human breathing is a combination of three lung functions, ventilation, diffusion
and circulation. In the present thesis, ventilation functioning is focused for the
measurment and simulation. One of the most interesting features of ventilation
functioning is its time varying volume flow rate. To measure this, the breathing
mask which covers nose and mouth are used with cooperating with the thermal
sensor. The sensor is called Time of Flight sensor, which is environmental con-
dition, like temperature or humidity, independent and direction sensitive. The
sensor gives two different information, one is the direction signal and the other
signal is proportional to the mass flow rate. With this system, the ventilation
volume flow rate can be precisely measured so that the exact human ventilation
simulation will be realized.
The sampled raw data of human ventilation will be analyzed to obtain the typical
ventilation curve which is used for diagnosis of lung functioning defection.
The second important part of this thesis is to simulate human ventilation
with certain equipment which can reproduce any kind of ventilation curve. The
simulation system is constructed with the mass flow contoroller which is applied
for the exhalation simulation and for the inhalation simulation, volume flow con-
troller, a proportional valve which is operated with vacuum pump and chamber.
The whole ventilation simulation system is constructed and the result of the
simulation is presented in this thesis.
This work need to be developed further to make the breathing dummy or
precise model of the human oropharynx so that it will provide the various possi-
bilities, for example, to examine the particle deposition inside the human trachea
etc.

Contents
1 Introduction 2
2 A Brief Literature Survey 4
2.1 Breathing System of human being . . . . . . . . . . . . . . . . . . 5
2.2 Measurement of the Human Breathing . . . . . . . . . . . . . . . 7
2.2.1 Parameters of Ventilation functioning tests . . . . . . . . . 9
2.2.2 Measurement Techniques of the Human Ventilation . . . . 11
2.2.3 Analyzing Technique of the Human Ventilation . . . . . . 14
2.3 Breathing Simulator . . . . . . . . . . . . . . . . . . . . . . . . . 16
3 Development of a Breathing Measurement System 23
3.1 Construction and Equipment for Breathing Flow Rate Measurements 23
3.1.1 Geometry of the breathing Mask . . . . . . . . . . . . . . 23
3.1.2 Incorporation of Flow Sensors . . . . . . . . . . . . . . . . 24
3.1.3 Calibration and Time response of the Sensor . . . . . . . . 30
3.1.4 Signal Processing . . . . . . . . . . . . . . . . . . . . . . . 35
3.2 Final Measurements . . . . . . . . . . . . . . . . . . . . . . . . . 35
4 Realization of a Ventilation Simulator 39
4.1 Construction of ventilation Simulator . . . . . . . . . . . . . . . . 39
4.1.1 Instrumentations . . . . . . . . . . . . . . . . . . . . . . . 39
4.1.2 Volume Flow Control System for Exhalation . . . . . . . . 41
4.1.3 Volume Flow Control System for Inhalation . . . . . . . . 42
4.2 Calibration of Combined Values . . . . . . . . . . . . . . . . . . . 43
4.3 Verification Test of the Simulator . . . . . . . . . . . . . . . . . . 45
4.4 Application of mass flow rate control system as an exhalation unit 45
5 Conclusions, Final Remarks and Outlook 47

CONTENTS ii
A numerical calculation of the three time components of the time
of flight sensor 50
A.1 principle of Operation . . . . . . . . . . . . . . . . . . . . . . . . 50
A.1.1 Response of the sending wire . . . . . . . . . . . . . . . . . 50
A.1.2 Time-of-flight calculations . . . . . . . . . . . . . . . . . . 53
A.1.3 Response of the receiving wire . . . . . . . . . . . . . . . . 58
A.2 Discussion of Responses of Sending and Receiving Wires . . . . . 60

List of Figures
2.1 Respiratory System . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.2 Schematic Representation of Lung volumes . . . . . . . . . . . . . 10
2.3 Volume-Displacement Spirometer . . . . . . . . . . . . . . . . . . 12
2.4 Various Spirometers . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.5 Flow Volume Loop . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.6 Classification of Abnormal Ventilation Functioning . . . . . . . . 16
2.7 Mechanical Ventilator . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.8 Digital Image of Active Servo Lung 5000 . . . . . . . . . . . . . . 18
2.9 Experimental setup of the flow field in Humans’ Oropharynx . . . 20
2.10 Idealized Model geometry of human oropharynx . . . . . . . . . . 20
2.11 Schematic aerosol experimental setup with Humans’ Inhaler . . . 21
2.12 3-D views of the oral airway model and bifurcation airway model . 22
2.13 Velocity and Non-dimensional temperature profiles . . . . . . . . 22
3.1 Digital image and Schematic Figure of the mask with the sensor . 25
3.2 CTA Ventilation measurement . . . . . . . . . . . . . . . . . . . . 27
3.3 Configuration of the Time of Flight Sensor . . . . . . . . . . . . . 28
3.4 Digital Image of the Time of Flight Sensor . . . . . . . . . . . . . 29
3.5 Schematic description of Time of Flight Sensor . . . . . . . . . . . 30
3.6 Measurement of time difference . . . . . . . . . . . . . . . . . . . 31
3.7 Time difference and the summation versus the flow velocity . . . 31
3.8 Calibration set up of the sensor for high velocity flow . . . . . . . 32
3.9 Calibration set up of the sensor for Low velocity flow . . . . . . . 33
3.10 Calibration curve of the extreme low velocity region . . . . . . . . 33
3.11 Calibration curve of the Time of Flight Sensor . . . . . . . . . . . 34
3.12 Frequency response of the Time-of-Flight sensor . . . . . . . . . . 36
3.13 Human Ventilation measurement with Time-of-Flight sensor . . . 38

LIST OF FIGURES 1
4.1 Configuration of the ventilation simulation system . . . . . . . . . 40
4.2 Digital image of the proportional valve . . . . . . . . . . . . . . . 41
4.3 Calibration Curve for the Exhalation Simulation . . . . . . . . . . 42
4.4 Calibration Curve for the Inhalation Simulation . . . . . . . . . . 43
4.5 Averaged Calibration Curve for Combined Condition . . . . . . . 44
4.6 Simulation of the Human Ventilation . . . . . . . . . . . . . . . . 46
4.7 Simulation of the Human Ventilation with Mass Flow Controller . 46
A.1 Sketch of the time of flight wires of sensor . . . . . . . . . . . . . 51
A.2 Theoretical prediction of sending wire time constant . . . . . . . . 54
A.3 Theoretical prediction of fluid time of flight . . . . . . . . . . . . 56
A.4 Fluid time of flight plotted on log scales . . . . . . . . . . . . . . 57
A.5 Theoretical prediction of fluid time of flight as a function of Peclet
number . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
A.6 Detected time of flight versus the flow velocity . . . . . . . . . . . 58
A.7 Theoretical prediction of receiving wire time constant . . . . . . . 59

Chapter 1
Introduction
In various fields of medicine like physiology or Aerosol medicine, investigations
related to the breathing of human beings have gained an increasing interest.
Mainly this work is concentrated on the instantaneous volume flow rate through
the mouth and nose of different individuals. Breathing is a physiological function
which is a combination of three functions, ventilation, perfusion (diffusion) and
circulation. For this thesis work, the ventilation function is the target of the
monitoring and simulation. The monitoring ventilation is interesting especially
for the people who work in medical field to diagnose the lung disease etc. as
well as the people who try to simulate the human ventilation mechanically or
numerically. There are two different kinds of Human Breathing simulator; one
is used for the patients who have the breathing problem, this can be called me-
chanical ventilator (Machine aided breathing system) and the other is the pure
breathing simulator for the measurements in e.g., Human Toxicology field. Some
researchers[13] have already developed the mechanical model of human orophar-
ynx to investigate the deposition of the particulate matters on the wall of it. Once
one develops the mechanical ventilation system and it is possible to cooporate
with such oropharynx system so that one can examine the particle deposition.
In Chapter 2, the measurement of the breathing in the clinics or medical
laboratory is mainly discussed. The purpose of the measurement for the medical
doctors is, for example, diagnosis of the disease. In the first section of this
chapter, the breathing system of humans is briefly explained and in the second
section, the measurement technique for the Human breathing, how to analyze
the result of the measurement and the parameter of them are introduced. The
human breathing simulator which is available in the world is introduced in the

3
last section.
In chapter 3, the monitoring system of the human ventilation volume flow
rate is discussed. The monitoring system including the breathing mask with
mass flow rate sensor is developed so that time varying human ventilation of
different individuals will be accurately sampled. For the sampling, firstly CTA is
applied, however, the result has considerable error thus the time of flight sensor
is applied for the necessity since it is not sensitive of the environmental condition
like temperature and humidity of the exhaled air.
In chapter 4, the experimental investigation of a mechanical ventilation simu-
lator is described. Firstly, two proportional valves, which are incorporated either
with vacuum chamber for the inhalation simulation or with pressurized air for
the exhalation simulation, are operated by the program of the soft ware Lab
view with data acquisition card to simulate the human ventilation. However,
the exhalation simulation does not suit the original ventilation curve because the
ventilation is time varying flow and simple proportional valve is not suitable for
that simulation. Thus a mass flow controller with pressure transducer is applied
for the ventilation simulation. The data line of real human ventilation curve is
applied for this mechanical simulation. The whole simulation system and the
result are presented in this chapter.
The conclusions and final remarks are written in chapter 5.

Chapter 2
A Brief Literature Survey
In this chapter, the work which is relevant to the breathing monitoring and
simulation, is briefly explained in three sections as human breathing system, the
measurement of the human ventilation and the human breathing simulator.
Human breathing is a combination of the lung functions of ventilation, per-
fusion and circulation. There are many kinds of breathing functioning test, how-
ever, one of the test, ventilation functioning test is a great interest for the medical
doctors and researchers since it gives the direct diagnosis of the lung disease. In
the second section of this chapter, the measurement technique for the ventilation
function which is mainly used in the clinics are referred and anlysing technique
of the sampled data are briefly explained.
In the third section, the breathing simulators are introduced. The fields of
interest in developing a breathing simulator are various. Particularly to develop
the breathing support machine(Mechanical Ventilator) is required for the patients
who are suffered from various respiration diseases. Not only for the patients, but
also once the breathing simulator is developed, it will be easy to make bench test
of the breathing mask filter etc. For example, influence of the contamination of
the environment for humans, namely the deposition of the particulate matter in
the oropharynx, which field is called Human Toxicology (inhalation toxicology of
air pollution) is one of the most promising fields with developing the breathing
simulator.

2.1 Breathing System of human being 5
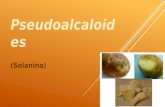
Figure 2.1: Respiratory System [5]
2.1 Breathing System of human being
Humans are the only mammal which breathes not only with the nose but also
with the mouth. Normally humans breathe in through the nose because it allows
humans to chew food and breathe at the same time since the nose is separated
from the mouth by a bone called palate. And the other reason is that the nose
works as a biological air conditioning unit and also it contains hairs which traps
large dust particles so that if there is a lot of dust in the air one may also sneeze
to remove it from the nostrils. In Fig.2.1 the human respiratory system is shown.
After taking the air through nose or mouth then it passes into the throat and
down the windpipe(trachea). The entrance of the trachea is protected by a valve,
the epiglottis, which closes when one swallows food or drink. And then the air
goes to the lungs. The lungs are found inside humans’ chest or thorax surrounded
by the rib cage which protects them. The ribs also support the lungs and help
to pump air in and out when humans breathe. This function is called ventilation
which flow is monitored and simulated in this thesis.
The other part of the thorax (chest) which helps to pump air in and out is the
diaphragm. The diaphragm is a sheet of fiber and muscle which rises and falls as

2.1 Breathing System of human being 6
Gas Inspired air (% ) Expired air (% )
Nitrogen 78 78
Oxygen 21 16
Carbon Dioxide 0.03 5
Water Vapor varies saturated
Table 2.1: Contents of the air of inhalation and exhalation
Temperature (◦C)
Inspired air Expired air
−70 +37
0 +37
+50 +37
Table 2.2: Temperature of the air of inhalation and exhalation[1]
humans breathe. During breathing in (inhalation), skeletal muscles such as the
diaphragm and external intercostals contract thereby increasing volume within
the thorax and lungs. As volume within the air spaces of the lung (intrapulmonic
volume) increases, air pressure within the lung (intrapulmonic pressure) falls
below atmospheric pressure and air rushes into the lung. During breathing out
(exhalation), the inspiratory muscles relax causing the volume of the thorax and
lungs to be reduced. The reduction in intrapulmonic volume is accompanied
by an increase in intrapulmonic pressure above atmospheric pressure, forcing
pulmonary gas back into the atmosphere. Normally, unlabored expiration at rest
is a passive event resulting from relaxation of inspiratory muscles. When an
increase in pulmonary ventilation is required, such as during exercise, expiration
becomes an active event dependent upon contraction of expiratory muscles that
pull down the rib cage and compress the lungs. On average an adult human
inspires and expires 10 to 20 cycle/min (the breathing frequencies or respiratory
rate is 0.17 to 0.33 Hz) during normal quiet breathing (eupnea). This can increase
to 25 cycle/min ( 0.42Hz ) during heavy exercise. Each time humans breathe
the air 5 to 7 L/min which is inspired and expired, about 0.5 L of air moves into
and out of the respiratory system. This volume is known as tidal volume (cf.
2.1.2). The product of tidal volume and respiratory rate is equal to the rate of

2.2 Measurement of the Human Breathing 7
pulmonary ventilation, also known as minute respiratory volume. A value within
normal range is 7.5 L/min. This, however, is when humans are resting. If one
begins to exercise, not only one breathes faster but also breathes deeper.
An adult human has an extra 2.5 L of breath to call upon if needed. When
taking heavy exercise a man could be breathing the air in and out up to 120
L/min.
The air that one inspires and expires is a mixture of gases as it is shown in
Table2.1. The most important of these are nitrogen, oxygen, carbon dioxide and
water vapor. The air that one expires is not the same as the air of atmosphere
as the water vapor in the atmosphere varies a lot depending upon the weather,
for example, the air is saturated with water vapor if it is raining, instead, the air
that one expires is always saturated with water vapor. The temperature of the
air of the humans’ inhalation and exhalation may also change as it is shown in
Table2.2. One breathes in cold air, the air is warmed up to body temperature by
the blood in the many capillaries which are found close to the walls of the nasal
cavity. These blood vessels also provide water which humidifies the air if it is too
dry so that it does not harm the lungs.
2.2 Measurement of the Human Breathing
In this section, the measurement of the breathing in the clinics or medical lab-
oratory is mainly discussed. Medical doctors and researchers test the breathing
functions for the following purposes:
1. Diagnosis of known or suspected lung disease
2. Treatment of lung disease, monitoring the effect of preventive measures or
diagnostic procedures
3. Establishing a prognosis
4. Pre-operative assessments
5. Evaluation of pulmonary disablement
6. Monitoring the respiratory health of populations
7. Interpretation of other volume dependent lung function tests

2.2 Measurement of the Human Breathing 8
Breathing is a physiological function which is a combination of three functions,
ventilation, perfusion (diffusion) and circulation. The breathing functioning test
can be categorized into 10 different tests [2]:
1. Ventilation functioning tests
e.g., Lung Volume test, Flow Volume curve analysis, Residual Volume Mea-
surement, Air way resistance test, Lung Compliance test
2. Exercise load test
e.g., Tredmill stress test
3. Sleeping respiration test
e.g., Polysomnography
4. Air way sensitive test
e.g., Astograph method, Body Plestymograph
5. Blood gas Analysis
e.g., Artery blood test, Mixed blood test
6. Lung diffusion test
e.g., DLCO (Diffusing Capacity for Carbon Monoxide Method)
7. Alveoli Gas diffusion test
e.g., Gas Dilution method, Closing Volume method
8. Respiration regulation test, Ventilation response test
e.g., CO2 ventilation response test, P0.1(Occlusion pressure test)
9. Circulation test
10. Others
In all these ten different kinds of breathing functioning test, the first three tests
are most relevant topic for this thesis work and especially the first one, ventilation
tests are most commonly used method in the clinics to detect different kinds
of diseases. Thus, the Ventilation functioning tests is mainly discussed in the
following.

2.2 Measurement of the Human Breathing 9
2.2.1 Parameters of Ventilation functioning tests
In Ventilation functioning tests, there are for example, airway resistance test and
lung compliance test. The former measures the pressure difference developed per
unit flow, measured as the difference in pressure between the mouth and that in
alveoli. The latter measures the lung volume change per unit of pressure change.
Since both are less related to the present thesis work no more details is given in
this thesis.
There are many parameters for the Lung Volume Test which can be divided
in two parts, one is the volume of air when humans breathe in relaxed manner
(unlabored respiration) and the other is the volume of the air of Labored res-
piration. All of them are recorded in liters and reported at Body Temperature,
Pressure, and Saturated with water vapor (BTPS).
Lung Volume of Unlabored Respiration
The volume parameters of unlabored respiration, which is performed in a relaxed
manner without haste or deliberately holding back is shown in Fig.2.2. The curve
in that Figure is called Spirogram which presents a graphic display of inspired
and expired air volume against time. Lung Volume of labored Respiration
Secondly the volume parameters of labored respiration which is performed when
humans respirate as forcefully and rapidly as possible. These parameters are
important for the volume flow loop analysis which is discussed in section2.2.3.
Forced Vital Capacity (FVC)
The maximum volume of gas that can be expired, after a maximal inspira-
tion to total lung capacity.
forced inspiratory vital capacity (FIVC)
A maneuver performed similarly beginning at maximal expiration and in-
spiring.
Forced Expiratory Volume (FEVT )
The volume of gas expired during a given time interval (T second) from the
beginning of the FVC maneuver. Of the various FEVT measurements the
FEV1 is the most widely used.
Forced Expiratory Flowx-y (FEFx−y)
The average flow rate during a given interval (percent) of the FVC maneu-
ver. The index x − y is used to denote the portion of the FVC for which

2.2 Measurement of the Human Breathing 10
Abbr. Full name Short description of the volume of the gas
VC Vital Capacity full inspiration after a maximal expiration
FRC Functional Residual Capacity remained in the lungs at the average the FRC level
RV Residual Volume present in the lung at the end of a full expiration
ERV Expiratory Reserve Volume maximally expired from the level of the FRC level
TV Tidal Volume inspired or expired during a normal respiratory cycle
IRV Inspiratory Reserve Volume inspired from the FRC level
IC Inspiratory Capacity maximal volume which is inspired from the FRC level
TLC Total Lung Capacity present in the lung at the end of a full inspiration
Figure 2.2: Schematic Representation of Lung volumes [3]

2.2 Measurement of the Human Breathing 11
this average flow is measured (mostly used as FEF25%-75%: the average
flow rate for the liter of gas expired after the first 25% of FVC during an
FVC maneuver).
Forced Inspiratory Flow (FIFx−y)
The average flow rate during a given interval (volume) of the FIVC maneu-
ver.
Maximum Voluntary Ventilation (MVV)
The largest volume that can be breathed during a 10- to 15- second interval
with voluntary effort. Normal values of healthy young men average between
150 to 200 L/min. (slightly lower in healthy women) and decreases with
age in both men and women.
Peak Expiratory Flow Rate (PEFR)
The maximum flow rate attained during an FVC maneuver. Normal values
for healthy young adults may exceed 600 L/min.
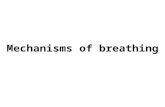
2.2.2 Measurement Techniques of the Human Ventilation
For the measurement of human ventilation functioning, spirometer is most com-
monly used in medical field. As it is shown in Fig.2.3, Usually nose clip and
mouthpiece are used for this measurement. There are various spirometers which
can be divided in two groups. One is volume displacement spirometers and the
other one is flow-sensing spirometers.
The Volume-Displacement spirometers provide a direct measure of respired
volume for example, displacement of a bell, piston or bellows spirometer. Fig.2.3
is an example of the spirometer with displacement of a bell.
They are recorded in the spirogram (cf, Fig.2.2) and the parameters like FEV1,
FVC and VC are calculated including correction to BTPS which is necessary for
the accurate measurement since Expired air is at body temperature and saturated
with water vapor but the air cools down in the spirometer.
The problem of the Volume-Displacement spirometers is the poor dynamic
characteristics. The response characteristics of them is faithful only for the
recording of events occurring over seconds (FVC, FEV1) and they are not usually
sufficiently fast to accurately record rapid events (e.g. PEF measurements). On
the other hand, flow-sensing spirometers generally utilize a sensor that measures

2.2 Measurement of the Human Breathing 12
Figure 2.3: Volume-Displacement Spirometer [8]
flow as the primary signal and calculate volume by electronic (analog) or numeri-
cal (digital) integration of the flow signal. The most commonly used flow-sensing
spirometers are with:
1. Pneumotachmeter,
2. Hot Wire Anemometer or
3. turbine blade
as shown in Fig.2.4. However, the accuracy of each new sensor may need to be
established.
Accuracy and reproducibility depend on the stability and calibration of the
electronic circuitry and appropriate correction of flow and volume to BTPS con-
ditions. For example, a small error when detecting 0 flow rate can cause these
devices to produce large errors in the measurement of FVC, as the error is con-
tinually added during the time needed to complete the exhalation. With heavy
use, the sensor may also change its calibration due to the condensation of water
vapor.

2.2 Measurement of the Human Breathing 13
Figure 2.4: Various Spirometers[7] upper:FleischPneumotachometer, middle:Hot
wire spirometer, bottom:Turbine spirometer

2.2 Measurement of the Human Breathing 14
The pneumotachograph derives the volume flow rate from the measurement of
pressure drop over a fixed resistance, consisting of a bundle of parallel capillary
tubes (Fleisch type pneumotachometer). The apparatus is designed in such a
way that the air flowing through the resistance has a laminar profile, ensuring a
direct proportionality between pressure drop over the resistance and flow. This
condition is met only within a given range of flows. When this range is exceeded,
the relationship between pressure drop and flow becomes nonlinear in the sense
that the pressure drop increases progressively more for a given increase in flow.
The limits of linearity should be known. Volume is obtained from analog or digital
integration of the flow signal. It has its own error as it can be explained with
the acceleration. Since the calibration is made under steady conditions, whereas
ventilation is a time varying Pulsating flow. This will cause also the decelerations
from the actual values especially for fast breathing measurement.
The ventilation measurement with constant temperature anemometry his also
inaccurate as the human ventilation is temperature varying and saturated with
water vapor. This problem is discussed in detail in Section 3.3 with the actual
ventilation measurement with CTA.
The turbine spirometer measures inaccurately the flow rate of time varying
Pulsating flow because of its inertia.
2.2.3 Analyzing Technique of the Human Ventilation
A hard copy of the spirogram(e.g. Fig.2.2) or flow volume curve (Fig.2.5) gives
valuable information of the ventilation functions. The factors which determine
the size of normal lungs are: age, height, weight, stature, gender, posture, habits,
ethnic group, reflex factors and daily activity pattern. The evaluation is, for
example, predicted vital capacity which is calculated by the subject’s age, height,
weight etc. is compared to the measured vital capacity. This is an example
equation [4] of the predicted vital capacity:
Male: (27.63− 0.112 ∗ age)∗height (ml)
Female: (21.78− 0.101 ∗ age)∗height (ml)
But only for 17 < age < 70
Reduction in VC (e.g., less than 80%) can be caused by a loss of lung tis-
sue. In general this may be the result of tissue destruction or resections (lobec-
tomy), space-occupying lesions (tumors), or changes in the composition of the

2.2 Measurement of the Human Breathing 15
Figure 2.5: Flow Volume Loop [3]
parenchyma itself (fibrosis). The VC is often reduced in obstructive lung disease.
Other causes of a decreased VC can also be: depression of the respiratory centers
or neuromuscular diseases, reduction of available thoracic space (pneumothorax,
cardiac enlargement) and limitations of thoracic (kyphoscoliosis) or diaphrag-
matic (pregnancy, ascites) movement, brain obstacle and the deformation of the
thorax.
The Volume Flow Loop (Fig.2.5) is a graphic analysis of the flow generated
during the FVC maneuver plotted against volume change (maximal expiratory
flow-volume MEFV) and is usually followed by the FIV maneuver, plotted sim-
ilarly (maximal inspiratory flow volume MIFV). In a volume Flow Loop instan-
taneous flow at any lung volume over the VC can be read directly from its
tracing.Flows at 75%, 50% and 25% of the VC are commonly reported as the
V’max75, V’max50, and V’max25 respectively (the subscript referring to the per-
centage of the lung volume (VC) remaining). Flow is also reported as FEF25%,
FEF50%, and FEF75% (the subscript referring to the portion of the lung volume

2.3 Breathing Simulator 16
a: Normal subjects
b: Obstructive Ventilatory defect
c: Asthma
d: Restrictive Ventilatory Defect
e: Various Restrictive Ventilatory Defects
Figure 2.6: Classification of Abnormal Ventilation Functioning [6]
(VC) that has been exhaled). If automatic timing is available the FEVT and
FEVT % can be determined for specific intervals. There are many interpretations
from the shape of the curve as it is shown in Fig.2.6.
2.3 Breathing Simulator
There are two different kinds of Human Breathing simulator; one is used for the
patients who have the breathing problem, this can be called mechanical ventilator
(Machine aided breathing system) and the other is the pure breathing simulator
for the measurements in e.g., Human Toxicology field.
There are various breathing support system or mechanical ventilator available

2.3 Breathing Simulator 17
Figure 2.7: Mechanical Ventilator[22]
in the market which works in the way that a Patient is connected to the ventilator
by a endotracheal tube passed through the nose or mouth into the trachea. The
mechanical ventilator delivers inspiratory gases directly into the person’s airway.
Fig.2.7 is an example of mechanical ventilator.
The other type of simulator ”Active Servo Lung 5000”[12] shown in Fig.2.8 is
an example. This can not be connected to the patients as mechanical ventilator
but it is used for the education of the medical students etc. Similar mechanism
has the ventilation simulators are used by the researchers who study about the
human toxicology. For example, Dr. Heenan et. al have constructed very pre-
cise human oropharynx model which is connected to the ventilation simulator[13]
(Fig.2.9, Fig2.10 to study particle deposition. Dr. Matida et al constructed the

2.3 Breathing Simulator 18
Figure 2.8: Digital Image and Schematic description of Active Servo Lung 5000

2.3 Breathing Simulator 19
experimental setup to test the efficiency of aerosol deposition together with a
commercial dry powder inhaler as it is shown in Fig.2.11 It is also interesting to
simulate the particle deposition, or mass transfer in the human oropharynx. Sev-
eral reserches[18][19][20] have made the models (Fig.2.12,Fig.2.13) and obtained
interesting results.

2.3 Breathing Simulator 20
Figure 2.9: Schematic experimental setup of the flow field in Humans’
Oropharynx[13]
Figure 2.10: Idealized Model geometry of human oropharynx[13]

2.3 Breathing Simulator 21
Figure 2.11: Schematic aerosol experimental setup with Humans’ Inhaler[21]

2.3 Breathing Simulator 22
Figure 2.12: 3-D views of the oral airway model and bifurcation airway model[18]
Figure 2.13: Velocity and Non-dimensional temperature profiles[18]

Chapter 3
Development of a Breathing
Measurement System
In this chapter, the human ventilation measurement system which is cooperated
with the time of flight sensor is described. The geometry of the designed measure-
ment mask is shown in the first section and in the second section, the principle
of the measurement sensor, time-of-flight sensor is briefly explained. In the third
section, some verification experiments are shown and in the last section, the final
measurement and the results are presented.
3.1 Construction and Equipment for Breathing
Flow Rate Measurements
3.1.1 Geometry of the breathing Mask
It is necessary to construct the breathing measurement mask carefully to measure
the volume flow rate of human ventilation accurately. There are two types of
masks which are available in the market such as nose mask and the mask for
mouth and nose. Human beings breath usually with nose, however, it is also
true that it is the only mammal which breaths not only with the nose but also
with the mouth because it has the ability of speaking. Thus it is required to
use the mask which covers both properly. Medical researchers use commonly the
equipment to measure the functioning of lung, such as spirometer (cf, chapter 2),
which requires to use nose clips and subjects breathe only with mouth.
In this thesis work, the mask which covers nose and mouth is selected to make

3.1 Construction and Equipment for Breathing Flow Rate Measurements 24
it sure the natural human ventilation will occur during the measurement, unlike
the conventional spirometry. The mask is incorporated with the time of flight
sensor, whose functioning principle explained in the next subsection.
The breathing mask and measuring set up is described in Fig.3.1. To connect
the breathing mask to the sensor, glass nozzle with the angle of 7◦ is applied to
avoid the flow separation during the respiration. To homogenize the incoming flow
and to protect the sensor wires from large aerosols which can cause measurement
errors and even can destruct the wires, flow straightening mesh is placed at the
exit of the breathing mask (the point A) and at the both entrance of the sensor
(B and C). The volume flow rate is calculated based on that the cross sectional
area where the thermal sensors are located and the velocity profile is 90% flat [9].
3.1.2 Incorporation of Flow Sensors
In this section, the incorporation of the sensor with the ventilation measurement
is described. First sub section shows the measurement of the human ventilation
with conventional Constant Temperature hot wire anemometry(CTA) is applied.
The result shows the difference between the sums of the air volume of inhala-
tion and exhalation in 5min-long measurement more than 10%, this difference is
the measurement error because of the exhaled air variation in temperature and
humidity. Thus, it is concluded that the new sensor must be used for the mea-
surement of human ventilation. The second sub section will briefly explain about
the principle of the time-of flight sensor and some verification experiments are
described.
3.1.2.1 Human ventilation Measurement with CTA
The first measurement of the human ventilation is done with CTA sensor. The
result of the human ventilation measurement with the CTA sensors shown in
Fig.3.2. The duration of the inhalation and the breathing frequency is correctly
measured, however, the summation of the air volume of the inhalation and ex-
halation in 5min measurement contains more than 10% difference such as the
inhalation is always more than that of exhalation due to the CTA sensor’s de-
pendency on the temperature. Since the conventional Constant Temperature Hot
Wire Anemometry (CTA) or Constant Current Hot Wire Anemometry (CCA)
[10] are the measurement technique which is based on using the heat loss from

3.1 Construction and Equipment for Breathing Flow Rate Measurements 25
Figure 3.1: Digital image and Schematic Figure of the mask with the sensor

3.1 Construction and Equipment for Breathing Flow Rate Measurements 26
Sensor parameter Value
Wire diameterdw 12.5µm
Wire lengthlw 5mm
Wire spacing∆x 1.5mm
Excitation frequencyf 30Hz
Table 3.1: The parameter of the time of flight sensor
the wire for the velocity calculation thus their accuracy is highly sensitive to the
variation of the flow temperature. It gives less output signal if the temperature of
the measured material is increased even though one calibrates the output signal
of the CTA sensor with the temperature correction factor. This error is not only
because of the temperature varying but also of the humidity in the flow. The
exhaled air is saturated with water vapor since the heat transfer of the hot wire
increases with increasing humidity[11].
Since the conventional hot wire anemometry does not measure the ventilation
accurately, a new sensor had to be utilized instead of CTA sensor. One needs a
sensor which is temperature independent and sensitive to the direction of the flow
since breathing has basically tow directions. According to the principle of the
time-of-flight sensor, the atmospheric temperature and the humidity do not effect
on the accuracy of the measurement [9]. In the next sub section, the principle of
time-of-flight is briefly explained.
3.1.2.2 The principle of Time-of-Flight sensor
The thermal sensor is chosen for the measurement because of its temperature
independence and its directional sensitivity. (Figure 3.3) There are three parallel
wires which are placed in the throat area. The middle one is the sending wire
which is heated by an oscillating current at 30Hz frequency. The rest two wires
are receiving wires, which detect the temperature variation in the wake of the
sending wire, are located at a distance 1.5mm each from the sending wire. The
length of all these heated wires, which are made of platinum, is 5mm and its
diameter is 12.5µm. The sensor geometry is designed by the company Draeger[14]
so that the form of the velocity profile is formed always turbulent velocity profile.
Fig.3.3 depicts the configuration of the sensor. The throat inner diameter is
12.5mm and the volumetric flow rate can be calculated with the cross sectional

3.1 Construction and Equipment for Breathing Flow Rate Measurements 27
- Inhalation Exhalation
1 0.423 0.328
2 0.539 0.342
3 0.461 0.440
3 0.398 0.279
4 0.499 0.347
5 0.424 0.372
duration Sum of Inhaled air Sum of Exhaled air error%
18sec 2.74 2.10 23.2
60sec 6.4 5.4 15.6
280sec 30 24.8 17.3
Figure 3.2: CTA Ventilation measurement
area and atmospheric temperature. The cross section, where the thermal sensor
is located is slightly thinner than the opening of the sensor and the angle is
7◦. Since the breathing measurement will be two directional measurements, the
geometry of the sensor must be symmetry.
The principle of the sensor function is the following. For simplicity, only one
directional sensor (two wire sensor) is discussed. In Fig.3.5 it is described two
wires mounted perpendicular to the flow to carry out time of flight measurements
which yield velocity information. The wire located in the upstream (wire A)

3.1 Construction and Equipment for Breathing Flow Rate Measurements 28
Figure 3.3: Configuration of the Time of Flight Sensor
is electrically heated device providing time varying thermal signal to the flow.
This resultant thermal signal is flown downstream to the receiving wire (wire
B) which operates as a resistant thermometer, and detects the delayed arrival
of the thermal signal. The measured time of flight and known distance between
the sending and receiving wires permit the flow velocity to be calculated with
the following equation.
4tf = ∆xU
Where ∆x is the distance between the hot wires and U is the flow veloc-
ity. Fig.3.6 shows the example of the time difference which are obtained from
the sending wire and receiving wire signal. The signal which is given to the
sending wire is sinusoidal varying electrical current and the receiving wire detects
the temperature oscillation. This total time difference contains three different
components,
1. the time of flight(convection by the fluid in the wake of the sending wire)
2. the thermal lag of the receiving wire

3.1 Construction and Equipment for Breathing Flow Rate Measurements 29
Figure 3.4: Digital Image of the Time of Flight Sensor

3.1 Construction and Equipment for Breathing Flow Rate Measurements 30
Figure 3.5: Schematic description of Time of Flight Sensor
3. the thermal lag of the sending wire
All time components can be numerically calculated as it is described in the
Appendix[9]. Although there are three different components, Fig.3.7 shows that
in the low velocity range, the range of human ventilation measurement (0.15m/s
to 2m/s), the thermal lag of the wires are negligible and only time of flight is
dominant.
3.1.3 Calibration and Time response of the Sensor
3.1.3.1 Calibration of the thermal sensor
For high volume flow rate such as more than 10L/min, Mass flow controller
has been used and for the low volume flow rate such as less than 10L/min the
calibration is done with the water chamber calibration since Mass flow controller
has its own error if the volume flow rate is too less.
The calibration of the sensor for high volume flow rate is done with the ex-
perimental set up which is shown in Fig.3.8. It is connected to the mass flow
controller[15] with 6m pipe and connector so that the flow will be fully devel-
oped. In the connector the mesh is equipped thus the velocity profile of the cross
section of the measuring point in the sensor will be turbulent (90%flat). The

3.1 Construction and Equipment for Breathing Flow Rate Measurements 31
Figure 3.6: Measurement of time difference[9]
Figure 3.7: The three components of the time difference and their summation
versus the flow velocity [9]

3.1 Construction and Equipment for Breathing Flow Rate Measurements 32
Figure 3.8: Calibration set up of the sensor for high velocity
signal will be transferred from the computer to the Mass flow controller through
Data Acquisition (DAQ) card and the signal from the sensor is acquired and
stored in the computer through the DAQ card.
As it is described in the Fig.3.9, the low volume flow rate calibration is done
by water chamber. The way of calibration is the following. There is a water
chamber with no leakage, except the upper part, where the sensor is connected.
When the valve located the bottom of the chamber is opened, water comes out
from the outlet and the surrounding air which volume is same as water, comes
into the chamber from the upper side through the sensor. The procedure of the
calibration is; firstly open the valve, take the water from the valve outlet of the
chamber and measure the mass of the water. Simultaneously the duration time
is also measured with stopwatch so that one can obtain the mean mass flow rate
of the water. The atmospheric pressure and temperature are measured by the
pressure gauge and thermocouple respectively for the calculation of the density
of the air and finally the mass flow rate of the air is obtained. The lowest velocity
less than 0.017m/s can be realized with this test rig, however, it is found that
as it is shown in Fig.3.10 the thermal sensor has free convection problem, it can
not measure the velocity less than 0.15m/s. The calibration curve for the
thermal sensor is shown in Fig.3.11. The Calibration is done totally two times in
different days on which temperature difference is 3 degree centigrade. Since the
thermal sensor is atmospheric temperature insensitive, the calibration curves are

3.1 Construction and Equipment for Breathing Flow Rate Measurements 33
Figure 3.9: Calibration set up of the sensor for Low velocity flow
Figure 3.10: Calibration curve of the extreme low velocity region

3.1 Construction and Equipment for Breathing Flow Rate Measurements 34
Figure 3.11: Calibration curve of the Time of Flight Sensor
obtained the difference between two calibrations is less than 5 %.
3.1.3.2 Frequency response of the sensor
Human breathing is two directional pulsating flow whose frequency ranges ap-
proximately from 0.17Hz to 0.33Hz in normal condition and can reach more

3.2 Final Measurements 35
than 0.42Hz after a heavy exercise. The frequency response test is proceeded
with such experimental set up as the combination of the signal generator and
mass flow controller connected with the TOF sensor for both direction. The si-
nusoidal signal is given to the mass flow controller from the signal generator so
that it can produce the sinusoidal time varying volume flow rate with different
frequencies but only one direction. The result of the frequency response is shown
in fig.3.12 as the given signal is the signal given to the mass flow controller and
detected signal is the acquired from the measurement electronics of the TOF
sensor. It is in principle same time responce characteristic is observed for both
direction, he is shown only for one directional frequency responce test results
with different frequencies. There is a time lag of 0.05sec in each frequency test.
This is due to the response of the mass flow controller, however, it is sufficiently
responding for the measurement of the Human ventilation.
3.1.4 Signal Processing
In the measurement, two signals from the measurement electronics of the sensor
are obtained; one corresponds to the mass flow rate and the other corresponds
to the flow direction. The signal for the mass flow rate is represented from 0 to
10 volt, on the other hand, signal for the direction is represented 0 or 5 volt.
In the actual measurement, 0 volt for the direction signal represents inhalation
and 5 volt does exhalation. According to the directional signal, inhalation and
exhalation is differentiated as inhalation is described negative volume flow rate
and exhalation is positive volume flow rate by the calculation with FORTRAN
program whose scheme is the following; firstly the noise signal like too high
volume flow rate signal is cut off since the normal quiet breathing does not reach
more than 35L/min and also the signal of the free convection range of the sensor
is replaced 0L/min since the sensor cannot measure less than 1.17L/min. After
cutting the noises, the signal is converted into the volume flow rate according to
the direction signal.
3.2 Final Measurements
The ventilation curve is sampled by the system which is described in Fig.3.1.
Fig.3.13 is the typical ventilation curve in normal quiet condition. This ventila-
tion measurement is done with 5 different individuals (different height, weight,

3.2 Final Measurements 36
Figure 3.12: Frequency response of the Time-of-Flight sensor
upper 0.1Hz middle 0.5Hz below 1Hz

3.2 Final Measurements 37
age and sex) taking summation of the volume of inhalation and exhalation re-
spectively for 5min normal quiet breathing, the volume difference between sum
of the in- and exhalation is always less than 2% whereas with the CTA sensor
measurement can not reach less than 10%.

3.2 Final Measurements 38
- Exhalation Inhalation
1 0.328 0.423
2 0.342 0.539
3 0.440 0.461
4 0.279 0.398
5 0.347 0.499
6 0.373 0.425
duration sum of exhaled air sum of inhaled air error%
18sec 2.11 2.75 30.2
60sec 6.59 6.38 3
120sec 12.65 13.47 6.5
180sec 19.12 19.56 2.3
240sec 24.38 24.60 0.9
280sec 28.70 28.57 0.4
Figure 3.13: Human ventilation measurement with Time-of-Flight sensor

Chapter 4
Realization of a Ventilation
Simulator
In this chapter, the realization of a breathing simulation system is described.
There is a brief explanation of the volume flow control system in the first two
sections. In the third section, the final ventilation simulation result is shown.
4.1 Construction of ventilation Simulator
In this section, the way how to construct the ventilation simulator is described.
The proportional volume control valve is selected to simulate the human ventila-
tion and the application for the valves is described in the following subsections.
4.1.1 Instrumentations
The configuration of the ventilation simulation system is shown in Fig.4.1.
The pressurized air is supplied up to 6bar. The vacuum chamber which ca-
pacity is more than 80m3 is connected to the vacuum pump manufactured by the
company Busch[?]. The vacuum pump type is GRV2000 and has the vacuuming
ability of 2000m3/h.
For volume flow rate controlling, two proportional valves with measurement
electronics which are manufactured by the company Buerkert[?] (Fig.4.2) are
used. The proportional valves change the opening (cross sectional area) according
to the electrical signal which ranges from 0 to 10 volt so that it controls the volume
flow rate. The proportional valve of type 6021 for the exhalation simulation,

4.1 Construction of ventilation Simulator 40
Figure 4.1: Configuration of the ventilation simulation system

4.1 Construction of ventilation Simulator 41
Figure 4.2: Degital image of the proportional valve
Type 6022 for the inhalation simulation and type 1094 for the measurement
electronics are used. The norminal width of the opening of the type 6021 valve
is maximum 1.6mm and that of type 6022, 4mm. To use the small opening
valve, the controlling capacity is bigger, however, it is necessary to employ the
bigger opening valve especially for the inhalation simulation because the pressure
difference can not reach more than 1bar as it is operated with negative pressure
with vacuum chamber and it can not give the sufficient amount of volume flow
rate for the inhalation simulation. The frequency response of the valve is set to
1000Hz in the measurement electronics.
The computer gives the ventilation curve to the data acquisition card (DAQ),
which is sampled from different individuals (cf. chapter 3) and DAQ card gives
the signal for opening and closing to the proportional valves and additionally,
obtaining the velocity and the flow direction signal from the TOF sensor simul-
taneously.
4.1.2 Volume Flow Control System for Exhalation
For the simulation of exhalation, the proportional valve is connected to the pres-
surized air supply. Since the volume flow rate depends not only on the electrical
signal but also on the pressure of the high-pressure side, it is necessary to calibrate
the valve with fixed inlet pressure.

4.1 Construction of ventilation Simulator 42
Figure 4.3: Calibration Curve for the Exhalation Simulation with opening and
closing
The calibration curve of the proportional valve with pressurized air is taken
for opening and closing of the valve in steady condition shown in fig.4.3. There is
output strain between opening and closing of the valve thus, for the ventilation
simulation, the averaged curve is taken as it is described in the next section.
4.1.3 Volume Flow Control System for Inhalation
For the simulation of inhalation, the same type of the proportional valve as for
simulation of exhalation is used with sub-pressure operation. Since the volume
flow rate is not sufficient with the opening size of the proportional valve operated
by the pressure difference between vacuum chamber and the atmospheric pressure
unlike the system with pressurized air. Hence a bigger opening proportional valve
is used. This valve is connected to the vacuum chamber which is vacuumed by the
pumps up to 0.04bar. The high-pressure side of the system of this simulation is
atmospheric pressure which is different from the system of exhalation simulation
with positive pressurized air. The atmospheric pressure remains constant and
independent on the opening of the valve unlike the exhalation simulation setup.
When the absolute pressure ratio between the high pressure side and low pressure
side is less than 0.528, the flow velocity at the valve opening reaches sonic velocity

4.2 Calibration of Combined Values 43
Figure 4.4: Calibration Curve for the Inhalation Simulation with opening and
closing
then the velocity and mass flow rate will remain constant. And it is required to
reach choked flow to get the constant volume flow rate. It is only possible in the
vacuum atmosphere as the pressure of the higher pressure side remains constant.
In this regard, since the opening of the valve does not affect the inlet pressure
(atmospheric pressure), inhalation simulation system can control the volume flow
rate more accurately than exhalation simulation system.
The calibration curve of the proportional valve with negative pressure oper-
ation is taken for opening and closing of the valve in steady condition shown in
Fig.4.4.
4.2 Calibration of Combined Values
After the connection of the two valves and completing the construction of the
whole set up, the calibration curve for both proportional valves are taken since
the back pressure affects the volume flow rate of the valves and the calibration
curves for the single connected setup are not any more valid. The final averaged
calibration curve is shown in Fig.4.5.

4.2 Calibration of Combined Values 44
Figure 4.5: Averaged Calibration Curve for Convined Condition

4.3 Verification Test of the Simulator 45
4.3 Verification Test of the Simulator
The ventilation simulation is realized by the system which is described in Fig.4.1.
The breathing data line is firstly taken from the subjects and the noise is cut
and obtained by the program and then separated into two parts, inhalation and
exhalation. These signals are conveyed parallel to each valve. The two valves open
and close mutually according to the signal, which is given from the computer.
The end of the system is connected to the plastic bag and it expands with the
inhalation simulation and shrinks with the exhalation which image is an artificial
lung. Fig.4.6 is the typical curve of the volume flow rate which measures of the
flow rate of whole system. It simulates the breathing for 5 minutes as the sampled
ventilation curve.
The negative volume flow rate is the inhalation simulation and the positive
volume flow rate is the exhalation simulation. The inhalation curve fits the
given signal curve relatively better than the exhalation simulation. The error is
based on the functioning of the proportional valve since the high pressure side
(pressurized air) does not remain constant according to the opening of the valve,
unlike for the simulation of the inhalation. The solution for this problem is to
corporate the mass flow controller to simulate the exhalation since the mass flow
controller has its own pressure calibrator in it so that the pressure does not change
according to the opening of the valve of the contoroller.
4.4 Application of mass flow rate control system
as an exhalation unit
Since the volume flow controller with pressurized air has less controllability be-
cause of pressure changes according to the opening and closing of the valve, the
mass flow controller is applied. The simulation result is shown in Fig.4.7. In
this figure, the negative volume flow rate is the inhalation and positive is the
exhalation. In this simulation, the exhalation simulation suits quite well whereas
the simple proportional valve can not have such controllability.

4.4 Application of mass flow rate control system as an exhalation unit 46
Figure 4.6: Simulation of the Human Ventilation
Figure 4.7: Simulation of the Human Ventilation with Mass Flow Controller

Chapter 5
Conclusions, Final Remarks and
Outlook
In this thesis, the measurement of the human ventilation and its mechanical
simulation are presented.
The time of flight sensor which is insensitive of the heat loss from the wires is
applied for the measurement of the human ventilation volume flow rate then, the
precise ventilation curve is obtained. The result is that the time of flight sensor
measurement of the ventilation has little error like less than 5% whereas CTA
sensor measurement contains always more than 10% error.
For simulating the human ventilation, two volume flow controller are firstly
employed. To improve the accuracy of the simulation, the proportional valve for
the high pressure side is replaced to the mass flow rate controller[15] since the
simple proportional valve is not suitable for the time varying flow because the
inlet air pressure varies with the opening area of the valve, it causes the less
controllability. The final result of the simulation is presented together with the
ventilation curve which is sampled from a individual.
To further development of this system, one can model the real form of human
oroparynx[13]. With that system, it would be possible to model like real human
ventilation and experimental tests of the deposition of particulate matters not
only when an individual inhals but also he exhalas.

Bibliography
[1] Paul Billiet, Shirley Burchill, Advancing in Natural Science, 1991, Paris,
France
[2] Shigeru Sakurai, Respiration functioning test, 1998, Iwate, Japan
[3] John N. Rhoades. 1997. Basic Pulmonary Function Testing.
http://asthma.about.com/library/weekly/aa091597.htm
[4] Baldwin, E. Deg., et al., Pulmonary insufficiency.I.Physiological classifi-
cation, clinical methods of analyses, standard values in normalsubject.
Medicine 27
[5] Gary Ritchison, Human Physiology, 8th edition by Stuart Ira Fox, 2004
[6] Rob Pierce and David P. Johns, The Spirometry Handbook, 1995, National
Asthma Counsil Ltd
[7] Philip H. Quanjer et al., http://www.spirxpert.com/
[8] Weinberger SE, Principles of Pulmonary Medicine, 2nd. ed. Philadelphia,
W.B. Saunders Co., 1992
[9] Ahmed Al-Salaymeh, Flow Velocity and Volume Flow Rate Sensors with a
Wide Band Width, Doctor thesis, 2001
[10] H.H. Brunn, Hot-wire Anemometry, 1995, Oxford University Press
[11] M. Still and F.Durst et al, Influence of humidity on the convective heat
transfer from small cylinders, Experiments in Fluids
[12] IngMar Medical, Ltd. www.ingmarmed.com

BIBLIOGRAPHY 49
[13] A.F.Heenan, E.Matida et al., Experimental measurements and computa-
tional modeling of the flow field in an idealized human orophjarynx, Exper-
imental in Fluids 35 (2003)
[14] www.draeger.de
[15] F.Durst et al, Mass flow rate control system for time-dependent laminar and
turbulent flow investigations, Measurement science technology 14(2003)
[16] www.buerkert.de
[17] www.buschpump.com
[18] Z. Zhang, C. Kleinstreuer, Species heat and mass transfer in a human upper
airway model, International Journal of Heat and Mass Transfer, Volume 46,
Issue 25, December 2003
[19] W. S. J. Uijttewaala, R. V. A. Oliemans, Particle dispersion and deposition
in direct numerical and large eddy simulations of vertical pipe flows, Physics
of Fluids 8, October 1996
[20] M. Kojic, A. Tsuda, A simple model for gravitational deposition of non-
diffusing particles in oscillatory laminar pipe flow and its application to
small airways, Aerosol Science August 2003
[21] E.A.Matida, W.H.Finlay, A new add-on spacer design concept for dry-
powder inhalers, Aerosol Science January 2004
[22] http://www.ccmtutorials.com/rs/mv/

Appendix A
numerical calculation of the three
time components of the time of
flight sensor
A.1 principle of Operation
With the present thermal flow sensor, the velocity signal is obtained by heating
the sending wire with a sinusoidal wave current, in this way the temperature
fluctuation is detected in the heated wake by the receiving wire. The total time
lag or phase shift between the current to the sending wire and the temperature
of the receiving wire, which acts as a resistance thermometer, is made up of the
thermal lag of the sending wire, the true time of flight (convection by the fluid in
the wake of the sending wire), and the thermal lag of the receiving wire. Thus,
∆t = Msending + ∆tf + Mreceiving (A.1)
M indicates the thermal time lag of the wires. The theoretical equations
and the solution procedure for the three time components are explained in the
following, e.g. Al-Salaymeh [3].
A.1.1 Response of the sending wire
The basic wire arrangement is sketched in Figure (A.1).
The sending wire, denoted wire A, was assumed to be heated by a sinusoidal
oscillating electrical current:

A.1 principle of Operation 51
Figure A.1: Sketch of the time of flight wires of the sensor
I(t) = I0 + ∆I · sin(2πft) (A.2)
passing the wire with an electrical resistance. The wire temperature then varies
according to the following differential energy equation:
ρwcwAw∂Tw
∂t︸ ︷︷ ︸A
=I2χw
Aw︸ ︷︷ ︸B
−πdwh(Tw − T∞)︸ ︷︷ ︸C
+ kwAw∂2Tw
∂z2︸ ︷︷ ︸D
−πdwσε(Tw4 − T∞
4)︸ ︷︷ ︸E
(A.3)
The explanations of the each term are following,
Term A: Heat stored in the wire on changing its temperature, where ρw is
the density of the wire material, cw is the specific heat of the wire material,
Aw = πd2w
4is the cross-sectional area of the wire, Tw is the wire temperature, and
t is the time.
Term B : Electrical heat-generation rate of the wire per unit length, where I is
the heating current and χw is the resistivity of the wire material at the local
wire temperature.
Term C: The forced-convection heat transfer rate out of the heated wire to
the fluid, where dw is the wire diameter,h is the coefficient of convective heat
transfer, Tw is the wire temperature and T∞ is the temperature of the fluid.
Term D : The conductive heat-transfer rate, where kw is the coefficient of
thermal conductivity for the heated wire and z is the distance measured along
the heated wire.
Term E : The radiation heat-transfer rate, out of the heated wire, where σ is the

A.1 principle of Operation 52
Stefan-Boltzmann constant and ε is the emissivity of the heated wire.
Order of magnitude considerations suggest that radiation heat transfer and
conduction along the wire (the last two terms) are both high order terms.
Specifically, the heat radiation from the heated wire to the cooler surrounding
is very low and often neglected in calculations. Under normal operating
conditions, the radiation losses are much less than 0.1% of the convection
losses and hence will not be considered further. The heat conduction to the
support plates is also negligible especially when the length to the diameter ratio
is large (wire length 5 mm, aspect ratio (l/d) 278). Thus the differential en-
ergy equation that describes the temperature of the sending wire reads as follows:
ρwcwAw∂Tw
∂t=
I2χw
Aw
− πdwh(Tw − T∞) (A.4)
This energy equation for the sending wire is first-order equation, whose coefficient
is not, in general, constant and can be written as the following form:
dTw
dt+ A1(t)Tw = A2(t) (A.5)
Taken into account that the resistivity of the wire material is temperature
dependent:
χw = χ∞{1 + α∞(Tw − T∞)} (A.6)
the following differential equation yields to describe the wire temperature:
dTw
dt=
I2χ∞Aw(ρwcwAw)
+(
I2χ∞α∞Aw(ρwcwAw)
− πdwh
ρwcwAw
)(Tw − T∞) (A.7)
For the heat transfer coefficient h , the following definition is used:
h = Nukf
dw
(A.8)
where kf is the thermal conductivity of the fluid and Nu is Nusselt number, for
which Collis and Williams [61] found by experiment the relation

A.1 principle of Operation 53
Nu = (0.24 + 0.56Re0.45) ·(
Tf
T∞
)0.17
(A.9)
where Re is the wire Reynolds number, which can be described as follows:
Re =Udw
ν(A.10)
ν is the kinematics viscosity of the fluid and Tf is the film temperature,
Tf =Tw + T∞
2(A.11)
All fluid properties are calculated at the film temperature. The equation of
Collis and Williams is valid for Reynolds number up to about 45, where vortex
shedding begins. With all these relationships, the final differential equation that
describes the time varying temperature of the sending wire is:
dTw
dt=
I2χ∞Aw(ρwcwAw)
+{
I2χ∞α∞Aw(ρwcwAw)
− πkf
ρwcwAw
(0.24 + 0.56Re0.45) · ( Tf
T∞)0.17ρwcwAw
}(Tw−T∞)
(A.12)
This differential equation needs to be solved to yield the wire temperature
as a function of time for given wire property, given fluid property and the
time-varying electrical current.
The time constant of sending wire Msend is then represented by the reciprocal of
the wire temperature coefficient kf , thus the time constant of the sending wire
can be written as:
M =πkf
ρwcwAw
(A.13)
In the Figure (A.2) shows the theoretical prediction of wire time constant for a
platinum wire with a diameter of 12.5µm under normal condition:
A.1.2 Time-of-flight calculations
A numerical computation was performed to estimate the temperature dis-
tribution around the heated sending wire, and especially the variation with

A.1 principle of Operation 54
Figure A.2: Theoretical prediction of sending wire time constant for a platinum
wire with a diameter of 18µm as a function of flow velocity
downstream distance along the x-axi. In order to obtain this exact time of flight
as a function of the free-stream velocity, the temperature distribution for the
flow over and behind a circular cylinder should be solved. From the calculated
temperature variation of the sending wire, the resultant temperature variation
of the fluid at the position of the receiving wire, denoted wire B in Figure
(A.1), the following two-dimensional partial differential equations (continuity,
time-dependent momentum and thermal energy equations) were solved:
Continuity Equation:∂U1
∂x1
+∂U2
∂x2
= 0 (A.14)
Momentum Equation:
ρ(
∂Uj
∂t+
∂(UiUj)
∂xi
)= − ∂P
∂xj
− ∂τij
∂xi
, i, j = 1, 2 (A.15)
Energy Equation:
cP
(∂ρT
∂t+
∂(ρUiT )
∂xi
)=
∂
∂xi
(k
∂T
∂xi
), i, j = 1, 2 (A.16)
Where ρ is the density, Ui is the Cartesian velocity component, xi is the

A.1 principle of Operation 55
Cartesian coordinate, t is the time, P is the pressure and τij is the molecular
momentum transport term of momentum, which can be defined as:
τij = −µ(
∂Uj
∂xi
+∂Ui
∂xj
)(A.17)
where µ is the dynamic viscosity, T is the temperature of the flow, cP is the
specific heat at constant pressure and k is the thermal conductivity.
A finite-volume computer code set up that described by Peric [?] and Lange
et al [?] was extended to permit the present computations to be performed.
The time derivatives in the momentum and energy equations are discretized with
an implicit finite difference scheme. This discretization procedure can be found
in Lange [?]. A structured mesh of quadrilateral CVs was used in the present
work. All dependent variables are located at the center of each CV. The multi-
grid method, which uses the idea of combining a fine grid with coarser grids,
is used for efficient convergence. The effect of such a multi-grid approach is
that the convergence rate becomes independent of the grid spacing and that the
computational effort only increases linearly with the number of grid points.
Computations with different values of Reynolds number were performed to
predict the thermal time of flight. The laminar flow around a circular cylinder in
the range of Reynolds number investigated (0.004 < Re < 45) has two regimes:
steady flow without separation (Re < 5), steady flow with two symmetric stand-
ing vortices behind cylinder (5 < Re < 45), and our present computations below
the regime of unsteady flow with vortex shedding (Re > 45). The Re of the
optimised sensor at (for a wire diameter) was only about 10. A fine grid was
selected around the cylinder wall to resolve the standing vortices. The surface of
the cylinder was discretized with a total of 416 CVs, which the total number of
CVs in the computation domain was 67584.
Figure (A.3) represents the computation results of the time of flight as a
function of the free-stream velocity based on a heated wire diameter. This com-
putation was performed by Al-Salaymeh [3] to estimate the time lag between the
sending temperature signal and the temperature signal at the receiving-wire po-
sition to give the time of flight. This figure shows clearly that the dynamic range
of the flow velocity obtained by time of flight alone is too limited. The data in
Figure (A.3) have been plotted on log scales as shown in Figure (A.4) to show
the results at low flow velocity. The time delays due to the wire time constants

A.1 principle of Operation 56
Figure A.3: Theoretical prediction of fluid time of flight versus the flow velocity
are not included in these figures. Also, according to the numerical computation
performed to estimate the temperature distribution around the heated wire, and
especially the variation with downstream distance along x-axis, it was found that
the solution to the two-dimensional energy equation for convection and diffusion
of heat in a laminar stream is a function of the Peclet number. It is possible to
interpret the Peclet number (Pe = Re·Pr , where Re depends on the distance ∆x
between the two wires) as the ration between the diffusion time (∆x2
a) and the
convection time (∆xU
), where a is the thermal diffusivity of the fluid ( a = kρcP
).
It is found that if the Peclet number is below 50, which means a flow velocity
below 0.7m/s with ∆x = 1.5mm , the diffusion effect will be noticeable, and
this effect will increase rapidly when the Peclet number decreases. Figure (A.5)
shows the relation between the Peclet number and the detected time of flight.
As shown in this figure and in Figure (A.6), the effect of diffusion is dominant
as the Peclet number becomes smaller. The time of flight will reach a constant
value as the free-stream velocity decreases below a few centimetres per second.
However, as the velocity increases, this situation is inverted and the diffusion
effect rapidly becomes negligible compared with the convection time and the
wire time constant. To simplify the whole situation, in the present case, the
relation ∆tf ≈ ∆xU
is used to estimate the time of flight value when needed.

A.1 principle of Operation 57
Figure A.4: Theoretical prediction of fluid time of flight versus the flow velocity
plotted on log scales
Figure A.5: Theoretical prediction of fluid time of flight as a function of Peclet
number

A.1 principle of Operation 58
Figure A.6: Detected time of flight versus the flow velocity for different sending-
wire diameters (5, 12.5 and 100µm ), all at ∆x = 1.5mm
A.1.3 Response of the receiving wire
Given the solution for the velocity and temperature on the wake centre line at the
position of the receiving wire, the variation of receiving wire temperature with
time can be calculated with the same code as the sending-wire response, but with
the forcing as the heat-transfer term.
The ambient fluctuation temperature, which is detected in the heated wake
by the receiving wire, has an approximately sinusoidal shape. The ambient
temperature fluctuation, which is a function of the flow velocity, can be expressed
as
Ta = Tm + ∆Tacos(ωt) (A.18)
where Tm is the mean ambient temperature at the receiving wire, ∆Ta is the
amplitude of the ambient temperature fluctuation and f is the frequency of the
ambient temperature fluctuation and that of the sending wire current, which is
chosen as 30Hz.
A very small, constant current passes through the receiving wire so that its
resistance can be measured, but its heating effect can be neglected. Therefore,
the thermal energy balance for the receiving wire can be written as

A.1 principle of Operation 59
Figure A.7: Theoretical prediction of receiving wire time constant for a platinum
wire with a diameter of 12.5µm as a function of flow velocity
dTw
dt=
πNukf
ρwcwAw
(Ta − Tw) (A.19)
where the Nusselt number Nu is dependent on fluid temperature and is given in
equation (A.9) , due to Collis and William [?], who defined it. Equation (A.19)
can be rewritten as
MdTw
dt+ Tw = Ta(t) (A.20)
where M is the receiving wire time constant:
M =ρwcwAw
πNukf
(A.21)
Figure (A.7) shows the theoretical prediction of receiving wire time constant
for a platinum wire with a diameter of 12.5µm under normal condition:

A.2 Discussion of Responses of Sending and Receiving Wires 60
A.2 Discussion of Responses of Sending and Re-
ceiving Wires
The energy equations for the sending wire, Equation (A.12), and the re-
ceiving wire, Equation (A.19), are first-order equations, whose coefficients are
not, in general, constant. So both equations can be written as the following form:
dTw
dt+ A1(t)Tw = A2(t) (A.22)
The time constant of both sending and receiving wires is represented by the
reciprocal of the wire temperature coefficient 1A1(t)
in Equation (A.22). A1(t) can
be written for two wires in the following form:
Sending wire:
A1(t) =πkf
ρwcwAw
(0.24 + 0.56Re0.45)(
Tf
Ta
)0.17
−(
I(t)2χ∞α
Aw(ρwcw
Aw))
(A.23)
Receiving wire:
A1(t) =πkf
ρwcwAw
(0.24 + 0.56Re0.45)(
Tf
Ta
)0.17
(A.24)
The second term ( I2(t)χ∞αAw(ρwcw
Aw) in Equation (A.23) is very small compared with the
first term, thus it can be neglected at very low overheat ratio and high velocity.
This term does not appear in the receiving-wire equation since the receiving wire
is externally heated from the flow, which carries the heat tracer from the sending
wire.
In the practical case, it is neglected the difference between the wire time
constant of the sending wire and the receiving wire. In the following chapters,
the term wire time constant always refers to the receiving wire time constant
unless specifically indicated.
Equation (A.22) is highly non-linear. To linearize this equation, it is possible
using some appropriate mean values. The velocity, current, temperature, resis-
tance and all variables can be expressed by time independent mean values plus
time dependent fluctuation components. The time averages of the fluctuating
quantities are zero. Therefore, the instantaneous change in the heat stored

A.2 Discussion of Responses of Sending and Receiving Wires 61
within the wire is equal to the difference between the changes in the heat input
and the heat loss. The linearized dynamic response of the sending or receiving
wire can be written from equation as
Md∆Tw
dt+ ∆Tw = f(t) (A.25)
where M is the wire time constant, which is equal to 1A1
, and f(t) is the input
forcing function. In this case a sinosoidal wave:
f(t) = Acos(ωt) (A.26)
This expression states that the temperature fluctuations of the sending
or receiving wires respond as a first-order system with forcing functions due
to the fluctuating current and velocity. The above equation can be solved to yield
∆Tw =1
M
∫ t
−∞exp(−t− τ
M)f(τ)dτ (A.27)
The response of the temperature fluctuation ∆Tw in the frequency domain to
the current fluctuations, through the function f(t) is
∆Tw =A
1 + ω2M2(cos(ωt) + Mωsin(ω)t) (A.28)
The magnitude of the temperature fluctuation of the wire is approximately the
same as that of the forcing input function. For this consideration, it is clear
that to achieve the potential for bandwidth enhancement offered by the present
sensor, it is essential that the current frequency of the sending wire should be as
small as possible. In the practical case, the sending current frequency is chosen
to be 30Hz.
The effects of the wire material, the geometry and the operational conditions
determine the time constant. This time constant is strongly dependent on the
flow velocity. It follows that the different wire materials may change the time
constant by factor of about 2, with platinum giving the smallest value. The
time constant is independent of the length but strongly dependent on the wire
diameter. The most significant way of increasing the phase shift is to use a large

A.2 Discussion of Responses of Sending and Receiving Wires 62
wire diameter and so the wire time constant will increase. In the practical case,
the wire diameter is chosen to be 12.5µm.

Kurzfassung
Das Ziel dieser Arbeit ist, die Beatmung des Menschens zu simulieren. Ein
interessantes Feature von der Beatmungsimulation ist die genaue Messung des
zeitabhngigen Volumenstroms. Weil die konventionellen Sensoren, zum Beispiel
Konstant-Temperatur- Hitzdrahtanemometer, wegen ihrer Abhaengigkeit von der
atmosphaerischen Temperatur und Feuchtigkeit, die Beatmung nicht so akkurat
messen koennen, sollte man einen neuen Sensor anwenden, um genau zu messen.
Deshalb hat die Authorin dieser Thesis einen sogenannte ”Time of Flight”-Sensor,
eine Art Thermoanemometer, verwendet.
Der Sensor hat drei Draehte, einer davon ist der sendende Draht und die
anderen zwei sind die empfangende Draehte. Es ist eine Maske entwickelt,
die Nase und Mund vollstaendig abdeckt, und die an den Sensor ber das At-
mungsrohr angeschlossen ist. Das Atmungsrohr ist im wesentlichen ein Diffusor
mit einem Oeffnungswinkel geringer als 7◦, damit keine Strmungsabloesung stat-
tfinden kann. Nachdem der Atmungsmessung wird das Siganl in Volumenstrom
umgerechnet und das hochfrequente Geraeusch wird ueber ein FORTRAN Pro-
gramm gefiltert.
Im zweiten Teil dieser Thesis wurde eine Versuchsvorrichtung erstellt, um
den Luftstrom der Atmung nachzubilden. Die Vorrichtung ist mit einer Massen-
stromregelung fr die Ausatmung und einer Volumenstromdrossel fr die Einatmung
ausgestattet. Bei der Volumenstromdrossel handelt es sich um ein Proportional-
ventil, das mit einer Vakuumpumpe und -kammer betrieben wird. Die Ergebnis
von der Simulation ist in der Thesis praesentiert.
In einem nchsten Schritt sollte die Vorrichtung in einen Dummy eingebaut
werden, der wie ein Mensch atmen kann. Da einige Forscher bereits ein mecha-
nisches Modell fuer den Mundrachenraum entwickelt haben, kann die vorliegende
Vorrichtung mit dem Mundrachenraummodell auch kombiniert werden, um ver-
schiedene toxikologische Experimente durchzufhren, wie z.B. die Untersuchung

A.2 Discussion of Responses of Sending and Receiving Wires 64
von Partikelablagerungen im Mundrachenraum.

Acknowledgement
It is my great pleasure to acknowledge to all people who have helped me for
completing this master thesis in the Institute of Fluid Mechanics (LSTM) in
Erlangen-Nuremberg university.
First of all, I am very thankful to Prof. Dr. Dr. h.c. F. Durst who is
the head of the institute, since he has continuously encouraged, supported and
given me proper guidances during whole my study for Master of Scinence. I
am greatful to him for giving me such opprotunity to work with this interesting
topic of the thesis under his supervision.
I owe special thanks to Dr. J.Jovanovic, head of turbulence group, and
O. Ertunc, Ph.D student in LSTM for their guidance and supervision. I am very
greatful to B. Unsal, Ph.D student in LSTM for his help to complete my thesis.
I am thankful to all of my colleagues and technicians who work in LSTM
for their helpful advice, fruitful discussions and good time which we spent
together.
I am greatly indebted to DAAD(German Academic Exchange Servis) for
their financial support during my study for Master of Scinence.
Finally, I thank my parents, brother and all friends who have always sup-
ported me through my stay in Germany.