Branch and Bound in Rotation Space (ICCV 2007)
66
description
U. Direction (unit) vectors from cameras (blue) to points (black) are given : Find the positions of the cameras and points. Branch and Bound in Rotation Space (ICCV 2007). Essential Matrix Estimation Encodes the relative displacement between two cameras. Rotation Translation - PowerPoint PPT Presentation
Transcript of Branch and Bound in Rotation Space (ICCV 2007)


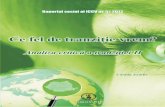
U


Direction (unit) vectors from cameras (blue) to points (black) are given : Find the positions of the cameras and points.






Branch and Bound in Rotation Space (ICCV 2007)

Essential Matrix Estimation
Encodes the relative displacement between two cameras.
•Rotation
•Translation
• Needs at least 5 points
X
x1 x2
(R, t)

2-view SfM with known rotations


Best current error
We can eliminate all rotations within the ball of radius 0.3 about trial.
Rotation Space

theta
v


Angle between two quaternions is half the angle between the corresponding rotations, defined by
All rotations within a delta-neighbourhood of a reference rotation form a circle on the quaternion sphere.
Isometry of Rotations and Quaternions

Flatten out the meridians (longitude lines)
Azimuthal Equidistant Projection
Angle-axis representation of Rotations
Rotations are represented by a ball of radius pi in 3-Dimensional space.

Subdividing and testing rotation space

Numbers of cubes left at each iteration (Log-10 scale)
Remaining Volume at each iteration (Log-10 scale in cubic radians).
Performance

V’
t
V
C’
C
X
Point correspondence in two views
Coplanarity constraint with uncertainty
Linear Programming, not SOCP

Multi-Camera Systems (Non-overlapping) – L inf Method
Translation direction lies in a polyherdron (Green) from point correspondences

Multi-Camera Systems (Non-overlapping) – L inf Method

Each point correspondence gives two LP constraints on the direction t (epipolar direction).

Essential Matrix Calculated from 3 points (above) or 4 points (below)
Possible rotations.

Timing Examples
29 correspondences : 2.9 seconds
794 correspondences : 75 seconds.
6572 correspondeces : 3m 30 seconds
Timing (in milliseconds) for E-matrix computation – 360 degree camera.
0
50
100
150
200
250
300
350
0 500 1000 1500 2000
360 degree camera

Further Application – 1D camera (e.g. robot moving in a plane)
Joint work with Kalle Astrom, Fredrik Kahl, Carl Olsson and Olof Enquist
Complete structure and motion problem for “planar motion”
Optimal solution in L-infinity norm.
Same idea of searching in rotation space.

Original and dual problems
Reconstructed points and path
Hockey Rink Data

Method works also for rigidly placed multi-camera systems.
•Can be considered as a single “generalized” camera
•One rotation, one translation to be estimated.

Robust 6DOF motion estimation from Non-overlapping images, Multi-camera systems
4 images from the right 4 images from the left
(Images: Courtesy of UNC-Chapel Hill)


Generalized Cameras (Non-overlapping)
Ladybug2 camera(The locally-central case)
5 cameras (horizontal)1 camera (top)

Generalized Cameras (Non-overlapping)
Experiment setup

Generalized Cameras (Non-overlapping)
An Infinity-like path which the Ladybug2 camera follows(total 108 frames)


Robust 6DOF motion estimation from Non-overlapping images, Multi-camera systems
Critical configuration


Generalized Cameras (Non-overlapping) – Linear Method
Estimated path (Linear Method) vs. Ground truth

Generalized Cameras (Non-overlapping) – Linear Method

Generalized Cameras (Non-overlapping) – Linear Method
Demo video : 16 sec (Click to play)


Multi-Camera Systems (Non-overlapping) – SOCP Method

Multi-Camera Systems (Non-overlapping) – L inf Method


Multi-Camera Systems (Non-overlapping) – L inf Method
E+SOCP : Motion of multi-camera rigs using SOCP methodBB+LP : Motion of multi-camera rigs using L inf method

Multi-Camera Systems (Non-overlapping) – L inf Method
E+SOCP : Motion of multi-camera rigs using SOCP methodBB+LP : Motion of multi-camera rigs using L inf method

Multi-Camera Systems (Non-overlapping) – L inf Method
Estimated path (L inf Method) vs. Ground truth

Multi-Camera Systems (Non-overlapping) – L inf Method

Multi-Camera Systems (Non-overlapping) – L inf Method
Demo video : 16 sec (Click to play)




Obtaining an initial region












277,000 3D points triangulated.
All but 281 proved by simple test to be minima.
All except 153 proved to be global minima by more complex test.

Hardy: Pure mathematics is on the whole distinctly more useful than applied. For what is useful above all is technique, and mathematical technique is taught mainly through pure mathematics.