Block Diagram Models Block Diagram Manipulation · PDF fileBlock Diagram Models, Signal Flo w...
6
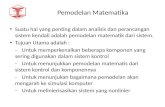
Dynamic Systems and Control Lavi Shpigelman Block Diagram Models, Signal Flow Graphs and Simplification Methods Block Diagram Models • Visualize input output relations • Useful in design and realization of (linear) components • Helps understand flow of information between internal variables. • Are equivalent to a set of linear algebraic equations (of rational functions ). • Mainly relevant where there is a cascade of information flow Block Diagram Manipulation Rules G 1 X 1 G 2 X 2 X 3 G 2 G 1 X 1 X 3 = X 1 + X 2 ± G X 3 + X 2 ± G = X 3 G X 1 Block Diagram Manipulation Rules G X 1 X 2 X 2 X 1 G G X 2 X 2 = X 1 G X 2 X 1 X 1 G X 2 X 1 = G -1
Transcript of Block Diagram Models Block Diagram Manipulation · PDF fileBlock Diagram Models, Signal Flo w...

Dynamic Systems and ControlLavi Shpigelman
Block Diagram Models,Signal Flow Graphs andSimplification Methods
Block Diagram Models
• Visualize input output relations
• Useful in design and realization of (linear) components
• Helps understand flow of information between internal variables.
• Are equivalent to a set of linear algebraic equations
(of rational functions ).
• Mainly relevant where there is a cascade of information flow
Block Diagram Manipulation Rules
G1X1
G2X2 X3
G2 G1X1 X3
=
X1 +
X2
±G
X3
+
X2
±
G
=
X3G
X1
Block Diagram Manipulation RulesG
X1 X2
X2
X1G
G
X2
X2
=
X1G
X2
X1
X1G
X2
X1
= G-1

Block Diagram Manipulation Rules
GX2
X1
+
-
H
X2(I+GH)-1G=
GX1 X3
X2
X1G
X3
X2
+
±
+
±=
G-1
G1U(s)
+ -G2
+
+G3 G4
Y(s)
H3
H1
H2
+
-
Block Diagram Reduction(with SISO components)
+G2
+
+G3 G4
H3
H1
H2!G4
G1
+ -U(s) Y(s)
-
Block Diagram Reduction(with SISO components)
+G2
+
+G3 G4
H3
H1
H2!G4
G1
+ -U(s) Y(s)
-
Block Diagram Reduction(with SISO components)

+G2
G3 G4!!!!!!1-G3 G4H1
H3
H2!G4
G1
+ -U(s) Y(s)
-
Block Diagram Reduction(with SISO components)
+
H3
H2!G4
G2 G3 G4!!!!!!1-G3 G4H1
G1
+ -U(s) Y(s)
-
Block Diagram Reduction(with SISO components)
H3
G2 G3 G4!!!!!!!!!!!!1-G3 G4H1+ G2 G3H2
G1
+U(s) Y(s)
-
Block Diagram Reduction(with SISO components)
H3
G1G2 G3 G4!!!!!!!!!!!!1-G3 G4H1+ G2 G3H2
+U(s) Y(s)
-
Block Diagram Reduction(with SISO components)

G1 G2 G3 G4!!!!!!!!!!!!!!!!!!!!!!!1-G3 G4H1+ G2 G3H2+ G1 G2 G3 G4H3
U(s) Y(s)
Block Diagram Reduction(with SISO components)
Signal Flow Graphs
• Alternative to block diagrams
• Do not require iterative reduction to find transfer functions (using Mason’s gain rule)
• Can be used to find the transfer function between any two variables (not just the input and output).
• Look familiar to computer scientists (?)
Block Diagram Vs. SFG
• Blocks ⇒ Edges (aka branches)
(representing transfer functions)
• Edges + junctions ⇒ Vertices (aka nodes)
(representing variables)
Gx2+
±
H
x1 1x1
x1 G(s) x2 1x2
±H(s)
Algebraic Eq representation
• x = Ax + r
x1 = a11x1+a12x2+r1
x2 = a21x1+a22x2+r2
• y(s) = G(s)u(s) u1(s)
u2(s)
y1(s)
y2(s)
G11(s)
G22(s)
G12(s)
G21(s)

Another SFG Examplea12
y1 y2 y3 y4 y5
a32
y2 = a12y1 + a32y3
a12
y1 y2
a23
y3 y4 y5
a32 a43
y3 = a23y2 + a43y4
a12
y1 y2
a23
y3
a34
y4 y5
a24
a44
a32 a43
y4 = a24y2 + a34y3+a44y4
a12
y1 y2
a23
y3
a34
y4
a45
y5
a25
a24
a44
a32 a43
y5 = a25y2 + a45y4
Input / Output
• Input (source) has only outgoing edges
• Output (sink) has only incoming edges
• any variable can be made into an output by adding a sink with “1” edge
a12
y1 y2
a23
y3
a32
a12
y1 y2
a23
y3 y3
a32
1
1
y2
Definitions
• Input: (source) has only outgoing branches
• Output: (sink) has only incoming branches
• Path: (from node i to node j) has no loops.
• Forward-path: path connecting a source to a sink
• Loop: A simple graph cycle.
• Path Gain: Product of gains on path edges
• Loop Gain: Product of gains on loop
• Non-touching Loops: Loops that have no vertex in common (and, therefore, no edge.)
Mason’s Gain Rule (1956)Given an SFG, a source and a sink, N forward paths between them and K loops, the gain (transfer function) between the source-sink pair is
!Pk!kTij = !!!!
!
Pk is the gain of path k, ! is the “graph determinant”:
! = 1- !(all loop gains)
+ !(products of non-touching-loop gain pairs)
- !(products of non-touching-loop gain triplets)
+ ...
!k = ! of the SFG after removal of the kth
forward path

Mason’s Rule for Simple Feedback loop
P1 = G(s)
L1 = -G(s)H(s)
! = 1 - (-G(s)H(s))
!1 = 1
P1 !1 G(s) G(s)T(s) = !!! = !! = !!!!! ! ! 1+G(s)H(s)
1x1
x1 G(s) x2 1x2
-H(s)
Forward paths:P1 = G1G2G3G4G5G6 P2 = G1G2G7G6 P3 = G1G2G3G4G8
Feedback loops:L1 = -G2G3G4G5H2 L2 = -G5G6H1 L3 = -G8H1
L4 = -G7H2G2 L5 = -G4H4 L6 = -G1G2G3G4G5G6H3
L7 = -G1G2G7G6H3 L8 = -G1G2G3G4G8H3
Loops {3,4},{4,5} and {5,7} don’t touch
! = 1-(L1+L2+L3+L4+L5+L6+L7+L8)+(L3L4+L4L5+L5L7)
!1 = !3 = 1 , !2 = 1-L5 = 1 - G4H4
y(s) P1+P2!2+P3T(s) = !! = !!!!!`
x(s) !
G3 G4 G5 G6
-H3
-H1
G8
G1 G2
-H2
-H4
G7
1x(s) y(s)
A Feedback Loop Reduces Sensitivity To Plant Variations
1 G(s) 1y(s)
-H(s)
u(s)
G=10000
y(s)/u(s)=10000/(1+10000*0.01)=99.01
G=20000
y(s)/u(s)=20000/(1+20000*0.01)=99.50
y(s)/u(s)=G/(1+GH)
= 0.01