Block Diagram
70
SUMMER TRAINING PROJECT REPORT ON STUDY THE DESIGN OF PID MIRCOCONTROLLER at SSPL, DRDO “SOLID STATE PHYSICS LABROTARY” LUCKNOW ROAD, MINISTRY OF DEFENCE, DELHI Submitted to: Mr. JANESH KAUSHIK Scientist ‘C’ Submitted By: SHRESHTHA ARORA RINI LALI B.Tech ,3 rd year MSIT (GGSIPU)
-
Upload
atul-mittal -
Category
Documents
-
view
426 -
download
9
Transcript of Block Diagram

SUMMER TRAINING PROJECT REPORT
ON
STUDY THE DESIGN OF PID MIRCOCONTROLLER
at
SSPL, DRDO “SOLID STATE PHYSICS LABROTARY”
LUCKNOW ROAD,
MINISTRY OF DEFENCE, DELHI
Submitted to:
Mr. JANESH KAUSHIK Scientist ‘C’
Submitted By: SHRESHTHA ARORA
RINI LALI B.Tech ,3rd year MSIT (GGSIPU)
ACKNOWLEDGEMENT

We feel blessed and indebted at the moment of compilation of our practical training report. There are people who deserve our thanks and acknowledgement in bringing this work to fruitarian.It is our profound pleasure to express our sincere thanks to Director, SSPL for allowing us to do the project work in this esteemed organization. We would like to express our gratitude for his corporation and kind support.We would like to express our sincere thanks to Mr. JANESH KAUSHIK SC. “C” who provided all possible help and support whenever required.We owe special thanks towards our parents whose moral support and inspiration has gone a long way in the successful compilation of this work.Above all, we owe to the almighty GOD for paving our way to success.
RINI SHRESHTHA
DECLARATION BY THE CANDIDATE
We, RINI LALI and SHRESHTHA ARORA hereby declare that the project work entitled “TO STUDY THE DESIGN OF PID CONTROLLER” is an authentic work carried out by me at the SOLID STATE PHYSICS LABORATORY Lucknow Road, New Delhi under the guidance of Mr.Janesh Kaushik, scientist ‘C’.

DRDO was formed in 1958 from the amalgamation of the already functioning Technical Development Establishment (TDEs) of the Indian Army, and the Directorate of Technical Development & Production (DTDP) with the Defence Science Organization (DSO). DRDO was then a small organization with 10 establishments or laboratories. Over the years, it has grown multi-directionally in terms of the variety of subject disciplines, number of laboratories, achievements and stature.Today, DRDO is a network of 51 laboratories which are deeply engaged in developing defence technologies covering various disciplines, like aeronautics, armaments, electronics, combat vehicles, engineering systems, instrumentation, missiles, advanced computing and simulation, special materials, naval systems, life sciences, training, information systems and agriculture. Presently, the Organization is backed by over 5000 scientists and about 25,000 other scientific, technical and supporting personnel. Several major projects for the development of missiles, armaments, light combat aircrafts, radars, electronic warfare systems etc are on hand and significant achievements have already been made in several such technologies.
THE HIERARCHICAL RPERSENTATION OF DRDO IN THE MINISTRY OF DEFENCE IS SHOWN BELOW :-

Genesis & Growth
DRDO was formed in 1958 from the amalgamation of the then already functioning Technical Development Establishment (TDEs) of the Indian Army and the Directorate of Technical Development & Production (DTDP) with the Defence Science Organisation (DSO). DRDO was then a small organisation with 10 establishments or laboratories. Over the years, it has grown multi-directionally in terms of the variety of subject disciplines, number of laboratories, achievements and stature.
Today, DRDO is a network of more than 50 laboratories which are deeply engaged in developing defence technologies covering various disciplines, like aeronautics, armaments, electronics, combat vehicles, engineering systems, instrumentation, missiles, advanced computing and simulation, special materials, naval systems, life sciences, training, information systems and agriculture. Presently, the Organisation is backed by over 5000 scientists and about 25,000 other scientific, technical and supporting personnel. Several major projects for the development of missiles, armaments, light combat aircrafts, radars, electronic warfare systems etc are on hand and significant achievements have already been made in several such technologies.
Vision & Mission
Vision
Make India prosperous by establishing world class science and technology base and provide our Defence Services decisive edge by equipping them with internationally competitive systems and solutions.
Mission
Design, develop and lead to production state-of-the-art sensors, weapon systems, platforms and allied equipment for our Defence Services.
Provide technological solutions to the Services to optimise combat effectiveness and to promote well-being of the troops.
Develop infrastructure and committed quality manpower and build strong indigenous technology

Labs And Establishments
Aeronautical Development Establishment (ADE), Bangalore Advanced Numerical Research & Analysis Group (ANURAG),
Hyderabad Aerial Delivery Research & Development Establishment (ADRDE), Agra Armament Research & Development Establishment (ARDE), Pune Center for Artificial Intelligence & Robotics (CAIR), Bangalore Center for Fire,Explosive and Environment Safety (CFEES) Center for Military Airworthiness & Certification (CEMILAC), Bangalore Centre for Air Borne Systems (CABS), Bangalore Combat Vehicles Research & Development Estt. (CVRDE), Chennai Defence Agricultural Research Laboratory (DARL), Pithoragarh Defence Avionics Research Establishment (DARE), Bangalore Defence Bio-Engineering & Electro Medical Laboratory (DEBEL),
Bangalore Defence Electronics Application Laboratory (DEAL), Dehradun Defence Electronics Research Laboratory (DLRL), Hyderabad Defence Food Research Laboratory (DFRL), Mysore Defence Institute of Advanced Technology (Deemed University), Pune Defence Institute of High Altitude Research (DIHAR) Defence Institute of Physiology & Allied Sciences (DIPAS), Delhi Defence Institute of Psychological Research (DIPR), Delhi Defence Laboratory (DLJ), Jodhpur Defence Materials & Stores Research & Development Establishment
(DMSRDE), Kanpur Defence Metallurgical Research Laboratory (DMRL), Hyderabad Defence Research & Development Laboratory (DRDL), Hyderabad Defence Research & Development Establishment (DRDE), Gwalior Defence Research Laboratory (DRL), Tejpur Defence Scientific Information & Documentation Centre (DESIDOC),
Delhi Defence Terrain Research Laboratory (DTRL), Delhi Electronics & Radar Development Establishment (LRDE), Bangalore Gas Turbine Research Establishment (GTRE), Bangalore High Energy Materials Research Laboratory (HEMRL), Pune Institute of Nuclear Medicine & Allied Sciences (INMAS), Delhi

Institute of Systems Studies & Analyses (ISSA), Delhi Institute of Technology Management (ITM), Mussorie Instruments Research & Development Establishment (IRDE), Dehradun Integrated Test Range (ITR), Balasore Laser Science & Technology Centre (LASTEC), Delhi Microwave Tube Research & Development Center (MTRDC), Bangalore Naval Materials Research Laboratory (NMRL), Ambernath Naval Physical & Ocenographic Laboratory (NPOL), Cochin Naval Science & Technological Laboratory (NSTL), Vishakapatnam Proof & Experimental Establishment (PXE), Balasore Research & Development Establishment (R&DE), Pune Research Center Imarat (RCI), Hyderabad Scientific Analysis Group (SAG), Delhi Snow & Avalanche Study Estt (SASE), Chandigarh Solid State Physics Laboratory (SSPL), Delhi Terminal Ballistics Research Laboratory( TBRL),Chandigarh
Vehicle Research & Development Establishment (VRDE), Ahmednagar

SOLID STATE PHYSICS LABROTARYHistorical Background
Solid State Physics Laboratory (SSPL), one of the establishments under the Defence R&D Organization (DRDO), Ministry of Defence, was established in 1962 with the broad objective of developing an R&D base in the field of Solid State Materials, Devices and Sub-systems.The Laboratory has a vision to be the centre of excellence in the development of Solid State Materials, Devices and has a Mission to develop and characterize high purity materials and solid state devices and to enhance infrastructure, technology for meeting the futuristic challenges.
Areas of Work
The major activities at sspl include development of semi-conductor materials, solid state devices, electronic components/sub-systems and investigation of solid state materials/devices. Over the years, the Laboratory has developed core competence in the following areas:-
Design & Development of
GaAs based Microwave devices and circuits IR – devices Ferrite components SAW devices & sensors MEMs components Materials Development & Characterization
Achievements
The Laboratory has contributed immensely on the growth of materials and development of devices. Some of the achievements are:
SPST Switch GaAs MMIC technology MCT Linear Array

Remotely activated acoustic warning system (RAAWS) Silicon Photo diodes & Silicon Quadrant Detectors GaAs Gunn Diodes for W-band applications C-band Ferrite Phase Shifter Thermo – Electric Coolers
SPST Switch GaAs MMIC technology
MCT Linear Array
Facilities Available
Gaas Crystal Growth Facility Molecular Beam Epitaxy System Ion – Implantation system Electron Beam Micro Lithography system MOCVD system LPE System Mask Fabrication Facility Fourier Transform IR Spectrophotometer (2.5 – 25 m range) RF probing station Scalar and Vector Network Analyser Electron probe Micro Analyser Fab line for fabrication of MMIC

Gaas Crystal Growth Facility Molecular Beam Epitaxy System
Mask Fabrication Facility
Awards
Titanium Trophy for (1988) for outstanding performance among the science laboratories of DRDO
DRDO Technological Award of Rs.10,000/- to Shri Ishwar Chandra, Sc.-‘F’ & his team (14 members) for Development of Gunn & Schottky Barrier Diodes
DRDO Technological Award of Rs.10,000/- to Dr. Pran Kishan, Sc.-‘G’ & his team (12 members) for Development of C-Band Dual Mode Phase Shifter for the phased array radar system
Prime Minister Award for publishing best Hindi magazine “Rajat Jayanti Smarika 1989-90.
Path-Breaking Research Award to Dr. H.P. Vyas for developing and establishing 12 GHz MMIC technology in DRDO
DRDO Best Performance award for 1998 was awarded to Sh. Madan Thakur, Tech.-‘B’ by Hon’ble Prime Minister in Aug., 99
Commendation certificate & SA’s medal was awarded to Sh. B.S. Matheru, Sc.-‘F’ for Dev. Of S-band RF phase shifter.

Technology group award for “Dev. Of SPST Switch was awarded by SA to RM in the year 2002.
Best performance National Award 2003 welfare of person with disability was Mrs. Sneh Lata TO-‘A’.
ABSTRACT
Through our project we are showing the control of constant temperature
according to the desired value (set point) in a closed loop using PID controller
system. For this, we are using a microcontroller, a temperature sensor for
sensing the temperature of the closed loops. By using the microcontroller we
compare the desired value with current value and it is displayed in the LCD.
Also to provide the constant temperature, Fan or Heater is turned On or Off
according with the variations of current temperature in o C from desired set
point.

INTRODUCTION
The objective of our project “TEMPERATURE PID CONTROLLLER” is maintaining
the constant temperature in a particular area using PID controller.
Whatever the process or the parameter (temp, flow, speed, ..) the principles of
control are similar. Input and output signals are specified in this project is
digital. Control of a process is achieved by means of a closed loop circuit.
The control system is that means by which any quantity of interest in a
machine, mechanism or other equipment is maintained or altered in
accordance with a desired manner. Here we have used the closed loop
system; that is the feedback system. The feedback signal is derived from the
output of the system. This signal gives the capability to act as self correcting
mechanism. The beneficial effects of the feedback in the system with high
loop gain. The controlled variable accurately follows the desired value and also
feedback in a control system greatly improves the speed of its response.
One of the primary purposes of using feedback in control system is to reduce
the sensitivity of the system to parameter variations.
The project deals with a simple aspect of giving information about the
controlling of temperature. In this project we are developing a system, which
can control temperature automatically. The system is be capable of taking
decisions accordingly of heating and cooling.
This project is done by using microcontroller (8051) which was developed by
microchip company with several features than processors with cheap cost. A
temperature sensor PT-100 is used in sensing the temperature and PWM like
heater or fan are used for adjusting the temperature with desired temperature
value. The functions occurring are displayed on the liquid crystal display.

In this system, it can implement any applications about controlling or
monitoring the temperature without any human effort.

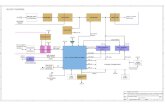
BLOCK DIAGRAM
BLOCK DIAGRAM DESCRIPTION
The block diagram for “temperature PID controller” circuit consist of
PT100
Micro-controller
C8051F35X-DK
Temperature sensor
(PT100)
Power supply
Micro keys
SET UP DOWN
PWM
Heater
Fan
LCD Display

C8051F35X-DK
POWER SUPPLY
PWM
DISPLAY SECTION
A fixed three terminal voltage regulator has a regulated dc output voltage of 5v
and provide it to PT100, C8051F35X-DK, micro keys, pwm and display section.
Temperature sensing section consists of an PT100 which acts as a transducer. It
senses the temperature and converts it into voltage as a scale of 1oC into
10mv.
At the heart of the circuit is microcontroller C8051F35X-DK with many
advantages and it is available in RISC architecture.
The output of the microcontroller is give to the pwm and display section.
Pwm we used here are Heater and Fan; they are used for adjusting the
obtained temperature with the desired temperature value.
The display section, through the HITACHI 44780, that displays temperature. It
is the main observable part of this whole system.


LIST OF COMPONENTS
REGULATOR 7805
C8051f35x-dk
PT100
MAXIM 6630
LCD DISPLAY – HITACHI 44780
DRIVERS (2)
IRL1004 (Heater driver)
Xyz (Fan driver)
MICROSWITCHES (3)
DIODES – 1N4007 (2)
CAPACITORS
C1 - 1000µF
C2 – 100µF
RESISTORS
R1 – 10k (3)
TRANSFORMER

OVERALL CIRCUIT DIAGRAM WORKING
The circuit shows microcontroller based temperature PID controller using
temperature sensor.
Microcontroller c8051f35x-dk is the heart of the circuit. It is available in RISC
architecture. The c8051f95x-dk is a mid-range 8-bit CPU optimized for Control
Applications.
PT100 is used as a temperature sensor. It sense the current temperature of a
closed loop and converts into corresponding voltage as it is a transducer. It is
connected to a chip MAXIM 6603 which is in turn connected to the AIN0 of the
microcontroller.
To set up the desired temperature value, we use the micro keys such as SET,
UP, DOWN. And also the tolerance value is set in the firmware using C
language.
According to the comparison of desired temperature (here we say as ‘Set
point’) with the current temperature, the pwm - Heater or Fan is worked.
Case I:
If the current temperature is greater than desired temperature (including
tolerance) then turn off the heater and turn on the fan.
Case II:
If the current temperature is less than the desired temperature (including
tolerance), then turn on the heater and turn off the fan.
Case III:

Else turn off both heater and fan.
The pwm output can be programmed as an input of the DAC, whose output is
feed into the current-to-voltage converter and then given to the drivers which
in turn is connected to a heater and a fan.
The processing of controller will been displayed on the LCD. The current
temperature as ‘CT’ and the set point as ‘SP’ can be observed on the first line
of LCD. And also, the present conditions of the pwm are displayed on the
second line of the LCD.

POWER SUPPLY DESCRIPTION
BLOCK DIAGRAM
The ac voltage, typically 220V ms, is connected to a transformer, which steps
that ac voltage down to the level of the desired dc output. A diode rectifier
then provides a full-wave rectified voltage that is initially filtered by a simple
capacitor filter to produce a dc voltage, this resulting dc voltage usually has
some ripple or ac voltage variation.
A regulator circuit removes the ripples and also remains the same dc value
even if the input dc voltage varies, or the load connected to the output dc
voltage changes. This voltage regulation is usually obtained using one of the
popular voltage regulator IC units.
Block diagram (Power Supply)
CIRCUIT AND EXPLANATION
Transformer(Step down)
Rectifier Filter IC Regulator
Load

WORKING PRINCIPLE
TRANSFORMER
The transformer will step down the power supply voltage (0 – 230 V) to (0-6V)
level. Then the secondary of the potential transformer will be connected to
the center-tapped full-wave rectifier; where diodes are working in the property
of one-side conduction capability.
CENTER-TAPPED RECTIFIER
In a rectifier, a center-tapped transformer and two diodes can form a full-wave
rectifier that allows both half-cycles of the AC waveform to contribute to the
direct current, making it smoother than a half-wave rectifier.
A center-tapped rectifier is preferred to the full bridge rectifier when the
output DC current is high and the output voltage is low. The advantages of

using precision rectifier are it will give peak voltage output as dc; rest of the
circuits will give only RMS output.
FILTERS
Pre-filter and post-filter are connected to the regulator IC. Distance between
pre-filter and post-filter should be 5cm. High frequency post-filters are used.
IC VOLTAGE REGULATOR
Voltage regulators comprise a class of widely used ICs. Regulator IC units
contain the circuitry for reference source, comparator amplifier, control
device, and overload protection all in a single IC. IC units provide regulation of
either a fixed positive voltage, a fixed negative voltage, or an adjustably set
voltage. The regulators can be selected for operation with load currents from
hundreds of milliamperes to tens of amperes, corresponding to power ratings
from milli watts to tens of watts.
A fixed three terminal voltage regulator has an unregulated dc input voltage,
Vi, applied to one input terminal, a regulated dc output voltage, Vo, from a
second terminal, with the third terminal connected to ground.
The series 78 regulators provide fixed positive regulated voltages from 5 to 24
volts.
For ICs, microcontroller, LCD ---------- 5volts.

T HE 80 51 MI CROCONT ROL LE R
The 8051 provides the following standard features: 4K bytes of ROM, 128
bytes of RAM, 32 I/O lines, two 16-bit timer/counters, five vector two-level
interrupt architecture, a full duplex serial port, and on-chip oscillator and
clock circuitry. In addition, the 8051 is designed with static logic for operation
down to zero frequency and supports two software selectable power saving
modes. The Idle Mode stops the CPU while allowing the RAM,
timer/counters, serial port and interrupt system to continue functioning.
The Power down Mode saves the RAM contents but freezes the oscillator
disabling all other chip functions until the next hardware reset.
T h e 80 51 M i c r o c o n t r o lle r ’s A r c h i t ec t u r e consists of these specific
features:
Eight-bit CPU with registers A (the accumulator) & B.
Sixteen-bit program counter (PC) and data pointer (DPTR).
Eight-bit program status word (PSW).
Eight-bit stack pointer (SP).
Internal ROM or EPROM (8751) of 0(8031) to 4K (8051).
Internal RAM of 128 bytes.
Four register banks, each containing eight registers.
Sixteen bytes, which may be addressed at the bit level.
Eight bytes of general-purpose data memory.
Thirty two I/O pins arranged as four-bit ports P0 – P3.
Two 16-bit Timer/Counters T0 and T1.

Full duplex serial data receiver/transmitter (SBUF).
Control registers TCON, TMOD, SCON, PCON, IP and IE.
Two external and three internal interrupt
sources. Oscillator and clock circuits.
As shown on the previous picture, the 8051 microcontroller has nothing
impressive at first sight:
4 Kb program memory is not much at all.
128Kb RAM (including SFRs as well) satisfies basic needs, but it is not
imposing amount.
4 ports having in total of 32 input/output lines are mostly enough to
make connection to peripheral environment and are not luxury at all.
As it is shown on the previous picture, the 8051 microcontroller have nothing
impressive at first sight:
The whole configuration is obviously envisaged as such to satisfy the needs of
most programmers who work on development of automation devices. One of

advantages of this microcontroller is that nothing is missing and nothing is too
much. In other words, it is created exactly in accordance to the average user‘s
taste and needs. The other advantage is the way RAM is organized, the way
Central Processor Unit (CPU) operates and ports which maximally use all
recourses and enable further upgrading.
8051 Microcontroller's pins
Pins 1-8: Port 1Each of
these pins can be configured as input or output.
Pin 9: RS Logical one on this pin stops microcontroller’s operating and erases
the contents of most registers. By applying logical zero to this pin, the program
starts execution from the beginning. In other words, a positive voltage pulse on
this pin resets the microcontroller.

Pins10-17: Port 3 Similar to port 1, each of these pins can serve as universal
input or output . Besides, all of them have alternative functions:
Pin 10: RXD Serial asynchronous communication input or Serial synchronous
communication output.
Pin 11: TXD Serial asynchronous communication output or Serial synchronous
communication clock output.
Pin 12: INT0 Interrupt 0 input
Pin 13: INT1 Interrupt 1 input
Pin 14: T0 Counter 0 clock input
Pin 15: T1 Counter 1 clock input

Pin 16: WR Signal for writing to external (additional) RAM
Pin 17: RD Signal for reading from external RAM
Pin 18, 19: X2, X1 Internal oscillator input and output. A quartz crystal which
determines operating frequency is usually connected to these pins. Instead of
quartz crystal, the miniature ceramics resonators can be also used for
frequency stabilization. Later versions of the microcontrollers operate at a
frequency of 0 Hz up to over 50 Hz.
Pin 20: GND Ground
Pin 21-28: Port 2 if there is no intention to use external memory then these
port pins are configured as universal inputs/outputs. In case external memory
is used then the higher address byte, i.e. addresses A8-A15 will appear on this
port. It is important to know that even memory with capacity of 64Kb is not
used (i.e. note all bits on port are used for memory addressing) the rest of bits
are not available as inputs or outputs.
Pin 29: PSEN if external ROM is used for storing program then it has a logic-0
value every time the microcontroller reads a byte from memory.
Pin 30: ALE Prior to each reading from external memory, the microcontroller
will set the lower address byte (A0-A7) on P0 and immediately after that
activates the output ALE. Upon receiving signal from the ALE pin, the external
register (74HCT373 or 74HCT375 circuit is usually embedded) memorizes the
state of P0 and uses it as an address for memory chip. In the second part of the
microcontroller’s machine cycle, a signal on this pin stops being emitted and P0

is used now for data transmission (Data Bus). In this way, by means of only one
additional (and cheap) integrated circuit, data multiplexing from the port is
performed. This port at the same time used for data and address transmission.
Pin 31: EA By applying logic zero to this pin, P2 and P3 are used for data and
address transmission with no regard to whether there is internal memory or
not. That means that even there is a program written to the microcontroller, it
will not be executed, the program written to external ROM will be used
instead. Otherwise, by applying logic one to the EA pin, the microcontroller will
use both memories, first internal and afterwards external (if it exists), up to
end of address space.
Pin 32-39: Port 0 Similar to port 2, if external memory is not used, these pins
can be used as universal inputs or outputs. Otherwise, P0 is configured as
address output (A0-A7) when the ALE pin is at high level (1) and as data output
(Data Bus), when logic zero (0) is applied to the ALE pin.
Pin 40: VCC Power supply +5V
WHY PID ?
1) PID Explained:

Only very control of temperature can be achieved by causing heater power to
be simply switched on and off according to an under or over temperature
condition respectively.
Ultimately, the heater power will be regulated to achieve a desired system
temperature but refinement can be employed to enhance the control
accuracy.
Such refinement is available in the form of proportional (P), integral (I), and
derivative (D) functions applied to the control loop. These functions, referred
to as control “terms” can be used in combination according to system
requirements. The desired temperature is usually referred to as the set-point
(SP).
To achieve optimum temperature control whether using on-off, P, PD or
PID techniques, ensure that:
a) Adequate heater power is available (ideally control will be achieved with
50% power applied!)
b) The temperature sensor, be it thermocouple or PRT, is located within
reasonable “thermal” distance of the heaters such that it will respond to
changes in heater temperature but will be representative of the load
temperature (the “thing” being heated).
c) Adequate “thermal mass” in the system to minimize its sensitivity to varying
load or ambient conditions.
d) Good thermal transfer between heaters and load.
e) The controller temperature range and sensor type are suitable – try to
choose a range that results in a mid-scale set-point.
Control functions simply described:

a) On – Off – Usually simplest and cheapest but control may be oscillatory.
Best confined to alarm functions only or when “thermostatic” type
control is all that is required, but this may be the most suitable means of
control in some applications.
b) Proportional (P) – A form of anticipatory action which slows the
temperature rise when approaching set-point. Variations are more smoothly
corrected but an offset will occur (between set and achieved temperatures) as
conditions very.
Average heater power over a period of time is regulated and applied power is
proportional to the error between sensor temperature and set-point (usually
by time proportioning relay switching). The region over which power is thus
varied is called the
Proportional Band (PB) it is usually defined as a percentage of full scale.
Offset is the deviation of the sensor temperature from the desired value (set-
point).
This can be adjusted out manually by means of a potentiometer adjustment
(Manual reset) or automatically (Integral Action).
c) Proportional + Derivative (PD) – The Derivative term when combined with
proportional action improves control by sensing changes and correcting for
them quickly. The proportional is effectively intensified (its gain is increased) to
achieve a quicker response.
PD action is commonly employed in general applications. Its use can help to
minimize or even eliminate overshoot on system start up, especially when an
approach (overshoot inhibition) feature is incorporated.

d) Proportional + Integral + Derivative (PID)
Adding an integral term to PD control can provide automatic and continuous
elimination of any offset. Integral action operates in the steady state condition
by shifting the Proportional Band upscale or downscale until the system
temperature and set-point coincide.
e) Choosing P, PD or PID
Although superior control can be achieved in many cases with PID control
action, values of the PID terms inappropriate to the application can cause
problems.
If an adequately powered system with good thermal response exists and the
best possible control accuracy is required, full PID control is recommended.
If somewhat less critical precision is demanded, the simpler PD action will
suffice and will suit a board range of applications.
If simple control is all that is required, for instance to improve upon
thermostatic switching, Proportional (P) or on-off action will suffice.
Adjustable PID Values?
If the controller specified offers adjustable PID values, the opportunity exists to
optimize or “tune” the control loop to achieve the best possible accuracy in
each case.
Various tuning methods exist but the following technique provides a simple
approach.
2) Optimizing Control Terms (Tuning):

Fast Tune PID Control
Firstly adjust P to minimum, D to off and I to off (or some very large value if not
to off).
Full power is applied to the heaters and is switched off when the measured
temperature rises to set-point. The resultant overshoots T0 and the time taken
to attain the maximum overshoot t0 (mins), allow suitable P, I and D values to
be calculated.
These or similar values should then be set on the controller and good result
will be achieved.
For critical processes there are alternative more precise methods for obtaining
optimum PID values. Such methods are more time consuming and Auto Tune
Techniques described below provide an attractive solution in most
applications, simple or complex.
Auto Tune PID Control
Auto tune controllers utilize PID terms and an “approach” feature which are all
optimized automatically. During the first process warm-up the controller
familiarizes itself with the system dynamics and performs self-optimization. No
user adjustments are required for PID values. Some instruments include an

“approach” feature to minimize or eliminate start-up overshoot, also
automatically.
3) Control Outputs:
Accurate and reliable energy regulations are essential for good control loop
performance if it is assumed that suitable PID values have been determined
and applied.
Depending on the method of applying energy to the process, for example
electrical energy to a resistive heating element, a suitable type of controller
output arrangement must be specified. In some cases, more than one output
may be required (e.g. for multizone heaters, heating-cooling applications)

THE PT100 SENSOR
DESCRIPTION
Pt100 is the common abbreviation for the most common type of resistance temperature sensor used in industry.
It has a specified resistance of 100.00 ohms at 0°C and is made of Platinum which has an accurately defined resistance vs. temperature characteristic.There are two minor variations, the most common giving 138.50 ohms at 100°C (DIN standard) and the other giving 139.00 ohms at 100°C (popular in Japan). It is most important to know which you are using when ordering or calibrating instrumentation.
Because accurate tables of resistance v. temperature are available it is common practice to calibrate instruments using precision decade boxes from table values.
Pt100 sensors were originally made with platinum wire wound on a ceramic former but are now made more cheaply by depositing a platinum film onto a ceramic substrate.Typical accuracies are 0.2%, 0.1% and 0.05% of value at 0°C. The higher the accuracy the higher the price. Note that there are two error characteristics, an offset error (ie. how far out it is at 0°C) and a span or gain error (ie. how the resistance change with tempearture agrees with the theoretical figure). The gain error depends on the offset error and the impurities in the platinum.These sensors are also made in 200, 500, and 1000 ohms values.Although the sensors are sold loose, it is usual to buy them made up into stainless steel probes for insertion into processes.

TEMPERATURE CHARACTERISTICS
Pt100 elements are specified over a temperature range of -200°C to 850°C however the actual operating temperature is determined by the construction of the probe into which they are incorporated. Typical low cost probes are made by soldering the Pt100 to PVC or silicon insulated copper wires. Obviously these are limited by the maximum temperature of the insulation. For higher temperature work the Pt100 is silver soldered or crimped onto mineral insulated wires and embedded in an insulating medium such as aluminium oxide powder.
At higher temperatures the platinum film can slowly evaporate which permanently changes the resistance of the sensor.
ERRORS
The low resistance of the Pt100 means that lead resistance can introduce noticeable errors. Lead resistance introduces two errors, an offset error caused by the lead resistance itself (which can be trimmed out) and a change in lead resistance with temperature (which cannot be trimmed out). These can both be overcome by the use of 3-wire and 4-wire compensation circuits.
Most probes are made in 3-wire configuration with one wire attached to one terminal and two wires attached to the other. In a bridge circuit the two wires end up in opposite arms of the bridge and their resistances cancel.
Note that 3-wire compensation is theoretically perfect only in constant current bridges. Constant voltage bridges are only perfect when the bridge is balanced, however in most cases the error is insignificant.
For two wire operation (normally very short cables) the twin wires are usually joined together.
Another cause of error is internal self heating. Because a current must be passed through the sensor to obtain a voltage signal for the electronics there is a small amount of power generated which causes the sensor to warm up and thereby changing its resistance. A large current will give a nice big signal for the electronics but also a larger self heating error. A small current reduces this error but lower drift electronics is required to minimize errors from the circuit.

The best trade off depends on the application however generally currents of the order of 1mA or less are typically used. Self heating errors are larger when measuring gas temperatures because of the poorer heat dissipation from the sensor.
The resistance/temperature characteristic of a Pt100 is not linear although for many applications the error is acceptable without correction.
A typical example: 0°C = 100ohm, 50°C = 119.4ohm, 100°C = 138.5ohm. Calibrating an instrument such that 0°C = 0% and 100°C = 100% will give a reading at 50°C = 50.4%.
There are several differing techniques for correcting the non-linearity of a Pt100 sensor including break point linearizers, and look up tables, but a simple technique is to slightly vary the current through the sensor as its value changes. Careful component selection can reduce the error by a factor of 10 or better.
DISADVANTAGES?
Most people regard the major disadvantages of the Pt100 sensor over other industrial sensors, such as thermocouples, as response time and physical strength.Modern Pt100 sensors are now so small and light that the response time no longer depends on the sensor itself. The response time of a Pt100 in a stainless steel sheath will be almost identical to that of an insulated thermocouple in an identical sheath because the thermal characteristics of the sheath are the major contributing factor.The physical strength of a thermocouple is still superior but a Pt100 sensor properly packed in aluminiun oxide in a stainless steel sheath should withstand everything short of a direct blow from a hammer.
COMPARISON OF SENSORS
Criteria Thermocouple RTD Thermistor Semiconductor
Temperature RangeVery wide
-450°F +4200°F
Wide-400°F
+1200°F
narrow-100°F+500°F
narrow-60°F to 250°F
Interchangeability Good Excellent Poor to fair Good

Long-term Stability Poor to fair Good Poor Good
Accuracy Medium High Medium High
Repeatability Fair Excellent Fair to good Good
Sensitivity (output) Low Medium Very high High
Response Medium to fast MediumMedium to
fastMedium to fast
Linearity Fair Good Poor Good
Self Heating No Very low to low High High
Point (end) Sensitive
Excellent Fair Good Good
Lead Effect High Medium Low Low
Size/Packaging Small to largeMedium to
smallSmall to medium
Small to medium
MY OPINION
The Pt100 is my preferred sensor for all industrial applications from -200°C to 600°C. It is accurate, relatively inexpensive and easy to use. Its output change with temperature is relatively large compared to thermocouples which means lower drift errors on the electronics.
For the majority of applications Pt100 probes may be replaced with no recalibration of instruments.
Because its resistance bears an absolute relationship to temperature (unlike a thermocouple whose output depends on the difference between the hot junction and cold junction) no special compensating circuit needs to be provided in the electronics.

LIQUID CRYSTAL DISPLAY
Liquid Crystal Display also called as LCD is very helpful in providing user interface as well as for debugging purpose. The most common type of LCD controller is HITACHI 44780 which provides a simple interface between the controller & an LCD. These LCD's are very simple to interface with the controller as well as are cost effective.
2x16 Line Alphanumeric LCD Display
The most commonly used ALPHANUMERIC displays are 1x16 (Single Line & 16 characters), 2x16 (Double Line & 16 character per line) & 4x20 (four lines & Twenty characters per line).
The LCD requires 3 control lines (RS, R/W & EN) & 8 (or 4) data lines. The number on data lines depends on the mode of operation. If operated in 8-bit mode then 8 data lines + 3 control lines i.e. total 11 lines are required. And if operated in 4-bit mode then 4 data lines + 3 control lines i.e. 7 lines are required. How do we decide which mode to use? It’s simple if you have sufficient data lines you can go for 8 bit mode & if there is a time constrain i.e. display should be faster then we have to use 8-bit mode because basically 4-bit mode takes twice as more time as compared to 8-bit mode.
Pin Symbol Function 1 Vss Ground 2 Vdd Supply Voltage
3 Vo Contrast Setting
4 RS Register Select
5 R/W Read/Write Select

6 En Chip Enable Signal
7-14
DB0-DB7
Data Lines
15 A/Vee Gnd for the backlight
16 K Vcc for backlight
When RS is low (0), the data is to be treated as a command. When RS is high (1), the data being sent is considered as text data which should be displayed on the screen.
When R/W is low (0), the information on the data bus is being written to the LCD. When RW is high (1), the program is effectively reading from the LCD. Most of the times there is no need to read from the LCD so this line can directly be connected to Gnd thus saving one controller line.
The ENABLE pin is used to latch the data present on the data pins. A HIGH - LOW signal is required to latch the data. The LCD interprets and executes our command at the instant the EN line is brought low. If you never bring EN low, your instruction will never be executed.
8051 Interfacing to LCD
For Contrast setting a 10K pot should be used as shown in the figure.

Display Data Ram (DDRAM) stores the display data. So when we have to display a character on LCD we basically write it into DDRAM. For a 2x16 LCD the DDRAM address for first line is from 80h to 8fh & for second line is 0c0h to 0cfh. So if we want to display 'H' on the 7th postion of the first line then we will write it at location 87h.
Now as you have noticed two types of data is given to the LCD data to be displayed, command or special instruction. So now let us write a subroutine for both the type of data

HEATER DRIVER
An IRL1004 power MOSFET switch is used to drive the heating element. This MOSFET can dissipate upto 200w when mounted on a suitable heat sink. The heating element is connected to the pin of the MOSFET and the gate input is controlled from the microcontroller.
Large industrial temperature control system are based on a.c. power control techniques using thyristors and triac.

FAN DRIVER

Silico
n La
bo
rato
ries
US
B D
EB
UG
AD
AP
TE
RRu
n
Pow
er
Stop
RE
SE
T P
3.7
C8051F35x-DK
C8051F35 X D EVELOPMENT K IT U SER ’S G UI DE
1. Kit Contents
The C8051F35x Development Kit contains the following items:
• C8051F350 Target Board• C8051Fxxx Development Kit Quick-Start Guide• Silicon Laboratories IDE and Product Information CD-ROM. CD content includes:
• Silicon Laboratories Integrated Development Environment (IDE)• Keil 8051 Development Tools (macro assembler, linker, evaluation ‘C’ compiler)• Source code examples and register definition files• Documentation• C8051F35x Development Kit User’s Guide (this document)
• AC to DC Power Adapter• USB Debug Adapter (USB to Debug Interface)• USB Cable
2. Hardware Setup using a USB Debug Adapter
The target board is connected to a PC running the Silicon Laboratories IDE via the USB Debug Adapter as shown in Figure 1.
1. Connect the USB Debug Adapter to the DEBUG connector on the target board with the 10-pin ribbon cable.2. Connect one end of the USB cable to the USB connector on the USB Debug Adapter.3. Connect the other end of the USB cable to a USB Port on the PC.4. Connect the ac/dc power adapter to power jack P1 on the target board.
Notes:• Use the Reset button in the IDE to reset the target when connected using a USB Debug Adapter.• Remove power from the target board and the USB Debug Adapter before connecting or disconnecting the
ribbon cable from the target board. Connecting or disconnecting the cable when the devices have power can damage the device and/or the USB Debug Adapter.
AC/DC
PC Adapter
USB Debug Adapter Target Board
USB Cable
PWR
SILICON LABORATORIES
MCU
P1.6
Port 2 Port 0
Port 1Port 3 Port 4
Figure 1. Hardware Setup using a USB Debug Adapter
Rev. 0.3 9/06 Copyright © 2006 by Silicon Laboratories C8051F35x-DK

C8051F35x-D K
Rev. 0.3 2
3. Software Setup
The included CD-ROM contains the Silicon Laboratories Integrated Development Environment (IDE), Keil software8051 tools and additional documentation. Insert the CD-ROM into your PC’s CD-ROM drive. An installer will auto- matically launch, allowing you to install the IDE software or read documentation by clicking buttons on the Installa- tion Panel. If the installer does not automatically start when you insert the CD-ROM, run autorun.exe found in the root directory of the CD-ROM. Refer to the readme.txt file on the CD-ROM for the latest information regarding known IDE problems and restrictions.
4. Silicon Laboratories Integrated Development Environment
The Silicon Laboratories IDE integrates a source-code editor, source-level debugger and in-system Flash program- mer. The use of third-party compilers and assemblers is also supported. This development kit includes the Keil Software A51 macro assembler, BL51 linker and evaluation version C51 ‘C’ compiler. These tools can be used from within the Silicon Laboratories IDE.
4.1. System RequirementsThe Silicon Laboratories IDE requirements:
• Pentium-class host PC running Microsoft Windows 98SE or later.• One available COM or USB port.• 64 MB RAM and 40 MB free HD space recommended.
4.2. Assembler and LinkerA full-version Keil A51 macro assembler and BL51 banking linker are included with the development kit and are installed during IDE installation. The complete assembler and linker reference manual can be found under the Help menu in the IDE or in the “SiLabs\MCU\hlp” directory (A51.pdf).
4.3. Evaluation C51 ‘C’ CompilerAn evaluation version of the Keil C51 ‘C’ compiler is included with the development kit and is installed during IDE installation. The evaluation version of the C51 compiler is the same as the full professional version except code size is limited to 4 kB and the floating point library is not included. The C51 compiler reference manual can be found under the Help menu in the IDE or in the “SiLabs\MCU\hlp” directory (C51.pdf).
4.4. Using the Keil Software 8051 Tools with the Silicon Laboratories IDETo perform source-level debugging with the IDE, you must configure the Keil 8051 tools to generate an absolute object file in the OMF-51 format with object extensions and debug records enabled. You may build the OMF-51 absolute object file by calling the Keil 8051 tools at the command line (e.g. batch file or make file) or by using the project manager built into the IDE. The default configuration when using the Silicon Laboratories IDE project manager enables object extension and debug record generation. Refer to Applications Note AN104 - Integrating Keil 8051 Tools Into the Silicon Labs IDE in the “SiLabs\MCU\Documentation\Appnotes” directory on the CD- ROM for additional information on using the Keil 8051 tools with the Silicon Laboratories IDE.
To build an absolute object file using the Silicon Laboratories IDE project manager, you must first create a project. A project consists of a set of files, IDE configuration, debug views, and a target build configuration (list of files and tool configurations used as input to the assembler, compiler, and linker when building an output object file).
The following sections illustrate the steps necessary to manually create a project with one or more source files, build a program and download the program to the target in preparation for debugging. (The IDE will automatically create a single-file project using the currently open and active source file if you select Build/Make Project before a project is defined.)

Rev. 0.3 3
C8051F35x-D K
4.4.1. Creating a New Project
1. Select Project→New Project to open a new project and reset all configuration settings to default.
2. Select File→New File to open an editor window. Create your source file(s) and save the file(s) with a rec- ognized extension, such as .c, .h, or .asm, to enable color syntax highlighting.
3. Right-click on “New Project” in the Project Window. Select Add files to project. Select files in the file browser and click Open. Continue adding files until all project files have been added.
4. For each of the files in the Project Window that you want assembled, compiled and linked into the target build, right-click on the file name and select Add file to build. Each file will be assembled or compiled as appropriate (based on file extension) and linked into the build of the absolute object file.
Note: If a project contains a large number of files, the “Group” feature of the IDE can be used to organize. Right-click on “New Project” in the Project Window. Select Add Groups to project. Add pre-defined groups or add customized groups. Right-click on the group name and choose Add file to group. Select files to be added. Continue adding files until all project files have been added.
4.4.2. Building and Downloading the Program for Debugging
1. Once all source files have been added to the target build, build the project by clicking on the Build/MakeProject button in the toolbar or selecting Project→Build/Make Project from the menu.
Note: After the project has been built the first time, the Build/Make Project command will only build the files that have been changed since the previous build. To rebuild all files and project dependencies, click on the Rebuild All button in the toolbar or select Project→Rebuild All from the menu.
2. Before connecting to the target device, several connection options may need to be set. Open the Connection Options window by selecting Options→Connection Options... in the IDE menu. First, select the appropriate adapter in the “Serial Adapter” section. Next, the correct “Debug Interface” must be selected. C8051F35x family devices use the Silicon Labs 2-wire (C2) debug interface. Once all the selections are made, click the OK button to close the window.
3. Click the Connect button in the toolbar or select Debug→Connect from the menu to connect to the device.
4. Download the project to the target by clicking the Download Code button in the toolbar.
Note: To enable automatic downloading if the program build is successful select Enable automatic con- nect/download after build in the Project→Target Build Configuration dialog. If errors occur during the build process, the IDE will not attempt the download.
5. Save the project when finished with the debug session to preserve the current target build configuration, editor settings and the location of all open debug views. To save the project, select Project->Save Project As... from the menu. Create a new name for the project and click on Save.

C8051F35x-D K
Rev. 0.3 4
5. Example Source Code
Example source code and register definition files are provided in the “SiLabs\MCU\Examples\C8051F35x” directory during IDE installation. These files may be used as a template for code development. Example applications include a blinking LED example which configures the green LED on the target board to blink at a fixed rate.
5.1. Register Definition FilesRegister definition files C8051F350.inc and C8051F350.h define all SFR registers and bit-addressable control/ status bits. They are installed into the “SiLabs\MCU\Examples\C8051F35x” directory during IDE installation. The register and bit names are identical to those used in the C8051F35x data sheet. Both register definition files are also installed in the default search path used by the Keil Software 8051 tools. Therefore, when using the Keil 8051 tools included with the development kit (A51, C51), it is not necessary to copy a register definition file to each project’s file directory.
5.2. Blinking LED ExampleThe example source files blink.asm and blinky.c show examples of several basic C8051F35x functions. These include; disabling the watchdog timer (WDT), configuring the Port I/O crossbar, configuring a timer for an interrupt routine, initializing the system clock, and configuring a GPIO port. When compiled/assembled and linked this pro- gram flashes the green LED on the C8051F350 target board about five times a second using the interrupt handler with a C8051F350 timer.

Pro
toty
pe
Are
a
DE
BU
G
Rev. 0.3 5
C8051F35x-D K
6. Target Board
The C8051F35x Development Kit includes a target board with a C8051F350 device pre-installed for evaluation and preliminary software development. Numerous input/output (I/O) connections are provided to facilitate prototyping using the target board. Refer to Figure 2 for the locations of the various I/O connectors.
P1 Power connector (accepts input from 7 to 15 VDC unregulated power adapter) J1 22-pin Expansion I/O connectorJ3 Port I/O Configuration Jumper BlockJ4 DEBUG connector for Debug Adapter interfaceJ5 DB-9 connector for UART0 RS232 interfaceJ6 Analog I/O terminal blockJ7 Connector for IDAC0 voltage circuitJ8 USB Debug Adapter target board power connectorJ9, J10 External crystal enable connectorsJ11 Connector for IDAC1 voltage circuitJ12 Connector block for Thermistor circuitryJ13, J14 ADC external voltage reference connectors
PWRP1.0 Reset
Pin 1
J5
P0.6Pin 2
J1
J3
Pin 1 Pin 2
P0.7
J11 J7
J12
J6
J13
J14
C8051F35X
Pin 2
Pin 1
J2J9 J10
J8
Pin 1 J4
P1
Pin 1
Pin 1Prototyping Area & I/O Connection Points
Figure 2. C8051F350 Target Board

C8051F35x-D K
6.3. Expansion I/O Connector (J1)6.1. System Clock SourcesThe C8051F350 device installed on the target board features a calibrated programmable internal oscillator which is enabled as the system clock source on reset. After reset, the internal oscillator operates at a frequency of3.0625 MHz (±2%) by default but may be configured by software to operate at other frequencies. Therefore, in many applications an external oscillator is not required. However, if you wish to operate the C8051F350 device at a fre- quency not available with the internal oscillator, an external crystal may be used. Refer to the C8051F35x data sheet for more information on configuring the system clock source.
The target board is designed to facilitate the installation of an external crystal. Remove shorting blocks at headers J9 and J10 and install the crystal at the pads marked Y1. Install a 10 MΩ resistor at R9 and install capacitors at C14 and C15 using values appropriate for the crystal you select. Refer to the C8051F35x data sheet for more infor- mation on the use of external oscillators.
6.2. Switches and LEDsTwo switches are provided on the target board. Switch SW1 is connected to the RESET pin of the C8051F350. Pressing SW1 puts the device into its hardware-reset state. Switch SW2 is connected to the C8051F350’s general purpose I/O (GPIO) pin through headers. Pressing SW2 generates a logic low signal on the port pin. Remove the shorting block from the jumper to disconnect SW2 from the port pins. The port pin signal is also routed to a pin on the J1 I/O connector. See Table 1 for the port pins and headers corresponding to each switch.
Three LEDs are also provided on the target board. The red LED labeled PWR is used to indicate a power connec- tion to the target board. The green LEDs labeled with port pin names are connected to the C8051F350’s GPIO pins through headers. Remove the shorting blocks from the headers to disconnect the LEDs from the port pins. The port pin signals are also routed to pins on the J1 I/O connector. See Table 1 for the port pins and headers correspond- ing to each LED.
Table 1. Target Board I/O Descriptions
Description I/O JumperSW1 Reset noneSW2 P1.0 J3[5–6]
Green LED D2 P0.6 J3[1–2]
Green LED D1 P0.7 J3[3–4]
Red LED PWR none

Pin # Description13 P1.2
14 P1.315 P1.416 P1.517 P1.6/IDAC018 P1.7/IDAC119 P2.020 AGND21 AGND22 AIN023 AIN124 AIN2
Pin # Description25 AIN3
26 AIN427 AIN528 AIN629 AIN730 VREF+31 /RST32 VREF–33 VDDA34 AGND- -- -
C8051F35x-D K
6.3. Expansion I/O Connector (J1)The 34-pin Expansion I/O connector J1 provides access to all signal pins of the C8051F350 device. Pins for VDD
and GND as well as pins for VDDA and AGND are also available. A small through-hole prototyping area is also provided. All I/O signals routed to connector J1 are also routed to through-hole connection points between J1 and the prototyp- ing area (see Figure 2 on page 5). Each connection point is labeled indicating the signal available at the connection point. See Table 2 for a list of pin descriptions for J1.
Table 2. J1 Pin Descriptions
Pin # Description1 VDD
2 GND3 P0.04 P0.15 P0.26 P0.37 P0.48 P0.59 P0.6
10 P0.711 P1.0
P1.1
6.4. Target Board DEBUG Interface (J4)The DEBUG connector (J4) provides access to the DEBUG (C2) pins of the C8051F350. It is used to connect the Serial Adapter or the USB Debug Adapter to the target board for in-circuit debugging and Flash programming. Table 3 shows the DEBUG pin definitions.
Table 3. DEBUG Connector Pin Descriptions
Pin # Description1 +3 VD (+3.3 VDC)
2, 3, 9 GND (Ground)4 C2D5 /RST (Reset)6 P3.07 C2CK8 Not Connected
10 USB Power
6.5. Serial Interface (J5)A RS232 transceiver circuit and DB-9 (J5) connector are provided on the target board to facilitate serial connec- tions to UART0 of the C8051F350. The TX, RX, RTS and CTS signals of UART0 may be connected to the DB-9 connector and transceiver by installing shorting blocks on header J3.
J3[7–8] - Install shorting block to connect UART0 TX (P0.4) to transceiver. J3[9–10] - Install shorting block to connect UART0 RX (P0.5) to transceiver. J3[11–12] - Install shorting block to connect UART0 RTS (P1.4) to transceiver. J3[13–14] - Install shorting block to connect UART0 CTS (P1.5) to transceiver.

C8051F35x-D K
7. Schematics
Pin # Description8 AIN39 AIN4
10 AIN5
11 AIN6
12 AIN7
13 AGND
14 VDDA
6.6. Analog I/O (J6)Many of the C8051F350 target device’s port pins are connected to the J6 terminal block. Connections for VDDA, AGND, ADC external voltage refences, IDAC outputs and ADC inputs are available. Refer to Table 4 for the J6 ter- minal block connections.
Table 4. J6 Terminal Block Pin Descriptions
Pin # Description1 IDAC02 IDAC1
3 VREF+
4 VREF–
5 AIN0
6 AIN1
7 AIN2
6.7. IDAC Connectors (J7, J11)The C8051F350 target board also features two Current-to-Voltage 1 KΩ load resistors that may be connected to the 10-bit current-mode Digital-to-Analog Converters (IDACs) on port pins P1.6 and P1.7. Install a shorting block on J7 to connect the IDAC0/P1.6 pin of the target device to a load resistor. Install a second shorting block on J11 to connect the IDAC1/P1.7 pin of the target device to a load resistor. The IDAC signals are then routed to the J1 and J6 connectors.
6.8. USB Debug Adapter Target Board Power Connector (J8)The USB Debug Adapter includes a connection to provide power to the target board. This connection is routed from J4[10] to J8[1]. Place a shorting block at header J8[2-3] to power the board directly from an ac/dc power adapter. Place a shorting block at header J8[1-2] to power the board from the USB Debug Adapter. Please note that the second option is not supported with either the EC1 or EC2 Serial Adapters.
6.9. Thermistor Connector Block (J12)A thermistor circuit is included on the board which allows for a ratiometric measurement of the included thermistor. To use the circuit, remove the shorting blocks on the IDAC headers (J7, J11) and the External Voltage Reference headers (J13, J14). Next, connect all of the signals on the thermistor connector block (J12). Software on the chip can be written to use IDAC0 as a reference current source for the circuit. The current creates a voltage across R27 which is used as an external Voltage Reference input, while the voltage across the thermistor (R26) can be mea- sured by connecting AIN0.0 to the AIN+ ADC input, and AIN0.1 to the AIN- ADC input.
6.10. External Voltage Reference (J13, J14)A precision 2.5V voltage reference source is also included on the C8051F350 target board. To use this circuit as a reference source for the ADC, place shorting block on headers J13 and J14. Note that software on the device should be configured to use an external reference when using this configuration. When using the internal (on-chip) reference source, headers J13 and J14 should be left open.

C8051F35x-D K
7. Schematics