Bio inspired Mechanisms Autonomous flying robot · leading edge. Also on the image 2 above can be...
24
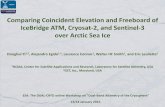
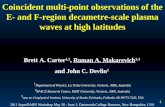
Bio inspired Mechanisms The bio inspired engineering is the process to learn concepts from the nature to apply them to the design of simpler and effective mechanism that can reproduce the desired behavior of the biological system. Nowadays the attempts to mimic animal motion have become a tendency resulting in several robots that move through the air, water and practically any environment. The continuous efforts to mimimc the natural movements of the animal kingdom have resulted in numerous achievements done by researchers all over the world. Autonomous flying robot During recent years the insect flight has enormously attract the attention due to their exceptional flight stability and maneuverability, for this reason the actual project the requirement is to propose a mechanism for an autonomous flying robot which have been chosen based on the flying insects, specifically on the honey bee. Since the bees are small insects and due the fact that as insects get smaller their aerodynamic performance decrease and to compensate they tend to flap their wings faster, also apart of this the bees also have to transfer pollen and nectar and carry large loads, sometimes as much as their body mass for the rest of the colony. The trajectories described by the wing tip in flying insects are remarkably diverse. Major stroke shapes cover oval, figure-eight and pear-shaped trajectories, including various combinations of those patterns. Nevertheless figure-eight shapes have been reported for the honeybee, the mayfly, the stonefly, the scorpionfly and various other insects (Brodsky, 1994; Ellington, 1984a; Magnan, 1934; Marey, 1873)[1] Image 1 Image 2 Movements analysis As it have previously mentioned the trajectory described by the wing tip is an eight-shape trajectory. Graphically this trajectory can be appreciated on image 1 above. On the image 1 the arrows indicate the direction of wing motion and the small circle at each segment indicates the leading edge. Also on the image 2 above can be appreciated a sketch of a honey bee while flying and the wings trajectory is coincident with the assumed as ideal shown on image 1, despite the real trajectory is not a perfect eight-shaped but rather the front side (respect to the honey bee body) of the eight-shape is smaller.
Transcript of Bio inspired Mechanisms Autonomous flying robot · leading edge. Also on the image 2 above can be...

Bio inspired Mechanisms
The bio inspired engineering is the process to learn concepts from the nature to apply them to the design of simpler and effective mechanism that can reproduce the desired behavior of the biological system.Nowadays the attempts to mimic animal motion have become a tendency resulting in several robots that move through the air, water and practically any environment. The continuous efforts to mimimc the natural movements of the animal kingdom have resulted in numerous achievements done by researchers all over the world.
Autonomous flying robot
During recent years the insect flight has enormously attract the attention due to their exceptional flight stability and maneuverability, for this reason the actual project the requirement is to propose a mechanism for an autonomous flying robot which have been chosen based on the flying insects, specifically on the honey bee. Since the bees are small insects and due the fact that as insects get smaller their aerodynamic performance decrease and to compensate they tend to flap their wings faster, also apart of this the bees also have to transfer pollen and nectar and carry large loads, sometimes as much as their body mass for the rest of the colony. The trajectories described by the wing tip in flying insects are remarkably diverse. Major stroke shapes cover oval, figure-eight and pear-shaped trajectories, including various combinations of those patterns. Nevertheless figure-eight shapes have been reported for the honeybee, the mayfly, the stonefly, the scorpionfly and various other insects (Brodsky, 1994; Ellington, 1984a; Magnan, 1934; Marey, 1873)[1]
Image 1
Image 2
Movements analysis
As it have previously mentioned the trajectory described by the wing tip is an eight-shape trajectory. Graphically this trajectory can be appreciated on image 1 above. On the image 1 the arrows indicate the direction of wing motion and the small circle at each segment indicates the leading edge. Also on the image 2 above can be appreciated a sketch of a honey bee while flying and the wings trajectory is coincident with the assumed as ideal shown on image 1, despite the real trajectory is not a perfect eight-shaped but rather the front side (respect to the honey bee body) of the eight-shape is smaller.

Due the fact that any synthesized mechanism will not generate an exact trajectory respect to the desired one, the work team have decided to rely on the ideal eight-shape for the analysis and it will be treated that the generated error gets compensated with the real “deformed” eight shape.
Synthesis of mechanisms
Synthesize a mechanism means that from a given movement to generate the designer will be able to find a mechanism that achieves that desired movement. Since this the synthesis of a determined mechanism can be:
1.- Type synthesis 2.- Number synthesis 3.- Dimensional synthesis
Type synthesis
This synthesis consists on selecting the type of mechanism through which the desired movement will be generated.
Type synthesis for the Honey Bee project To do the type synthesis for this specific project it will be considered several factors such as final dimensions, manufacture process, materials, costs, etc. As initial requirement the prototype should have final dimensions between 20 and 50 cm. The next step in the selection of the mechanism is the availability of the materials and tools to be used, from this and due a 3D printer is available this process have been chosen for the fabrication of the components and in consequence the material will be pla polymer. Also it is worth to mention that the type synthesis is again subdivided in two categories, linkages and mechanisms, where the category of linkages include the planar, spatial and spherical mechanisms and the mechanisms category include components such as cams, gears, chains and bands, etc. Due the simplicity and experience acquired during the course of synthesis and dynamics of mechanisms the type chosen is the planar linkage mechanism, also this type represents and advantage because the easy way the components are printed and assembled.
Number synthesis This synthesis consists on determine the number of linkages and articulations that the mechanisms should count with.
Number synthesis for the Honey Bee projectAs it was previously mentioned above the mechanism to be used is a planar linkage, then by simplicity the chosen is the four bar linkage, this selection has been based also on the acquired experience during the course with this mechanism and with the purpose that in the further analysis for the dimensional synthesis the known algorithm to solve the five pose burmester problem, proposed by Jorge Angeles and Khalid Al-Widyan [2] and the atlas “Analysis of the four bar linkage , its application to the synthesis of mechanisms” by John A. Hrones and

George L. Nelson[3] will both be used. As direct consequence of the use of this methods of synthesis the number of joints for this specific project will be: four main revolute joints and one spherical, the spherical joint is only used to insert and project the wing structure.
Up to this point the synthesis done is referred to the wings mechanism but as a project requirement the prototype is also demanded to walk, to achieve this requirement and in order to be coherent with the wings mechanism the chosen one is again a four bar linkage which again will be synthesized though the robust algorithm proposed by Jorge Angeles and Khalid Al-Widyan and/or the atlas “Analysis of the four bar linkage , its application to the synthesis of mechanisms” by John A. Hrones and George L. Nelson.
Dimensional Synthesis
This synthesis has the objetive to determine the individual dimensions of each one of the links so the mechanism achieves the desired movement. The dimensional synthesis also is subdivided three different categories:
1.- Function generation synthesis 2.- Trajectory generation synthesis 3.- Rigid body conduction synthesis
According to the requirements and the nature of the prototype desired the synthesis that will be used is the rigid body conduction synthesis which objetive is that a rigid body pass through a group of desired configurations.
Wings dimensional synthesis
For this synthesis the work team have chosen to start with the robust algorithm proposed by Jorge Angeles and Khalid Al-Widyan. As indicated in the method the first step is to propose five precision points with their respective orientations, these points have been determined from image 1 aided by the software AutoCad. In the table 1 shown below can be appreciated five points, these points were chosen after several attempts and are considered that represents faithfully the desired trajectory.
Table 1
Point X Y Angle
P1 0 0 140
P2 -1.428 -0.595 140
P3 -3.671 0.0066 90
P4 -2.294 0.864 40
P5 0.899 -0.411 40

With the points shown on table 1 and aided through the software MatLab, the synthesis throw the following graphic
Graphic 1 The graphic 1 shows the pair of coordinates which represents t h e p o i n t s w h e r e t h e mechanism will be joined to the fixed link.
(-3.569, 0.05027) Left(2.262, -0.2011) Right
Graphic 2This graphic represents the initial coordinates where the conector link must be joined in order to achieve the trajectory.
(-1.759, -2.312) Left(1.96, 2.564) Right

Image 3 Image 4
After the MatLab code generated the possible solutions shown on graphics 1 and 2, this coordinates were introduced to the SAM software resulting on two possible linkages. This two linkages can be appreciated on images 3 and 4. On the images above (3 and 4) the trajectory generated is represented by the purple line and as it can be appreciated the shapes of the trajectories are far to be an eight-shape and also the mechanism generated on image 4 has the Grashof defect.
After the points above shown, resulted in mechanisms which do not achieve the trajectory and/or present defect, the work team tried with several new precision points resulting in the
following new points which analysis is presented
Table 1-1
Point X Y Angle
P1 0 0 140
P2 -1.428 -0.595 140
P3 -3.671 0.0066 90
P4 -2.294 0.864 40
P5 1.616 -0.632 40

Graphic 3Pivots B and B*(-3.569, -0.1005) Left(2.463, -0.4524) Right
Graphic 4(-1.659, -2.714) Left(2.061, 2.463) Right

Image 5 Image 6
Again the MatLab code generated possible solutions to the synthesis problem, this solutions were simulated on SAM, resulting on the new mechanisms shown on images 5 and 6. This two mechanism again are far from an eight-shape and again present the Grashof defect.
Finally the team work attempted to synthesize with five new precision points, shown on table 1-2
through this new precision points the following coordinates have been obtained
Table 1-2
Point X Y Angle
P1 0 0 140
P2 -1.428 -0.595 140
P3 -3.671 0.0066 90
P4 -1.576 0.757 38
P5 2.658 -0.612 44

Graphic 5 (-3.72, -0.4524) Left(3.116, -0.7037)Right
Graphic 6(-1.709, -3.468)Left(2.614, 2.463)Right

Image 7 Image 8
On images 7 and 8 can be appreciated the simulated mechanisms that result from the coordinates shown ongraphics 5 and 6 and one more time this two solutions does not achieve the desired eight-shape and have the Grashof defect. After several attempts to synthesized the mechanism through the algorithm proposed by Jorge Angeles and based on the simulation of those possible solutions in the SAM software the work team decided to support the synthesis on the Analysis of the Four Bar Linkage Its Application to the Synthesis of Mechanisms by John A. Hrones and George L. Nelson, professor of mechanical engineering and assistant professor of mechanical engineering respectively in the MIT, which is an atlas of mechanisms with their respective trajectories.
Inspecting the atlas various mechanisms that achieve the eight-shape trajectory were found, it is worth to mention that those mechanisms that closely achieve the trajectory were very similar to the synthesized mechanisms by the Jorge Angeles algorithm, based on that fact the team chose the mechanism shown on page 15 of the book, this mechanism is also shown on the following image.
Image 9

On the image at the right can be found the scaling factors for the mechanism, where the link assigned with letter C represents the fixed one and the crank is the unit. On the image at the left the dotted lines represents the possible trajectories that this particular mechanism can generate, the trajectory that better fits with the requirements is the forth trajectory from right to left. The correct procedure to generate one of the possible trajectories (dotted lines) is to create a rigid link in which the point of interest is initially at the position marked with the blue circles. After applying this procedure to the bee project the four bar linkage generated is shown on image 14
Legs dimensional synthesis
For the walking pattern the chosen trajectory is a simple oval like the one shown in the following image 10
Image 10
Since this necessity the work team got involved in the task of synthesizing a mechanism that achieve such trajectory. Using the corresponding MatLab code the following pair of results were obtained
Image 11 Image 12
On images 11 and 12 the coordinates for the possible solution mechanism are shown. As it can be appreciated on image 11 exists two pairs of coordinates that represents the joints a and a* (according to the Jorge Angeles algorithm) nevertheless on image 12 (pivots b and b* according also to the algorithm) there are only one intersection of the curves and the second one is lying on the infinity.The interpretation of this result is that the fixed joint of this dyad is prismatic.Then in order prove that the synthesized mechanism generates the desired trajectory the application MotionGen have been used throwing the following results.

Image 13On the image at the left can be appreciated the generated mechan ism and the trajectories of two of the joints, for the project purposes the trajectory of interest is the shown on the image bottom with a blue line.
In the following section the kinematics for the wings and legs mechanism is presented.
Kinematic analysis
Kinematic analysis of the wings mechanism
In the image 14 below can be appreciated a simplified sketch of the synthesized mechanism.
Image 14
The kinematic analysis has been done in the usual way, moving through the vertical and horizontal directions in the auxiliary diagram, by doing this, the following equations have been obtained.
1.- � 2.- � 3.- �
This first three equations are the position governing equations for the mechanism, and from them the corresponding position, speed and acceleration for the mechanism will be known for any moment. From equation 1 can be deduced that the position theta, speed and acceleration will be know for any moment. Then from equations two and three
θ − C = 0−l1cosθ + l2cosβ + l3 cosα − H = 0l1senθ + l2senβ − l3 senα + V = 0

4.- �
5.- � And squaring equations 4 and 5 the following coefficients have been obtained:
� � �
And by direct substitution in the following formula the position of the out link for any moment is obtained:
6.- �
once this is know is easy to determine also the position of the conector link (betha) for any moment
7.- �
With equations 6 and 7 the position problem of the wings mechanisms is completely solved, then by direct derivation of equations 1, 2 and 3, and by simply solved the resulting two unknown by two equations system , the speed of the mechanism for any moment is as follows:
8.- �
9.- �
Now thanks to equations 8 and 9 the velocity problem for the wings mechanism is completely solved. Finally the equations 1, 2 and 3 were derived twice in order to obtain the governing expressions for the acceleration and the result is again a two by two system. After solving this system the results for the acceleration are as follows:
1 0 . - �
11.- �
l2cosβ = H + l1cosθ − l3cosα
l2senβ = − V − l1senθ + l3senα
A = − 2Vl3 − 2l1l3senθB = − 2Hl3 − 2l1l3cosθC = H2 + V 2 + l1
2 + l32 − l2
2 + 2Hl1cosθ + 2Vl1senθ
α = 2arcTan (−A ± A2 + B2 − C2
C − B)
β = 2arcTan (−V − l1senθ + l3senα
l2 + H + l1cosθ − l3cosα)
·α =l1
·θ(senθ + cosθ tanβ )l3(cosα tanβ + senα)
·β =l3 ·αcosα + l1
·θcosθl2cosβ
··α = (l1··θ(cosθ tanβ − senθ ) − l1
·θ2(cosθ + senθ tanβ ) + l2
·β2(cosβ − senβtanβ ) + l3
·α2(cosα + senα tanβ ))/(l3(tanβcosα − senα))
··β =−l1
··θcosθ + l1·
θ2senθ + l2·
β2senβ + l3··αcosα − l3·
α2senαl2cosβ

and once again with equations 10 and 11 the acceleration problem for the wings mechanism is completely solved, it is worth to mention that since the fact that the bee’s wing moves symmetrically the mechanism chosen will be exactly the same for both wings.
Specific Kinematic analysis of the wings mechanism
This analysis have been done for the P point located in the conector link as shown on image 3. The position vector for any moment is as follows:
12.- �
with � where rho is the constan and known angle of the rigid conector link.
Then if the equation 12 is derived results on the following equation 13 which represent the velocity of the specific point for any moment.
13.- �
Proceeding similarly, the equation 13 is again derived to obtain the expression for the acceleration of the point for any moment (equation 14)
14.- �
With this three equations then the specific kinematics for the wings mechanism is completely solved.
Up to now the kinematics presented are, as it was mentioned, for the wings mechanisms. In the following section will be presented the kinematics for the prototype’s legs.In the image 15 can be appreciated a sketch of the used mechanism
Image 15
rp = (−l1cosθ + lrcosϕ)i + (l1senθ − lrsenϕ)j
ϕ = ρ − β
·rp = (l1·θsenθ − lr
·ϕsenϕ)i + (l1·θcosθ − lr
·ϕcosϕ)j
··rp = (l1·
θ2cos + l1··θsenθ − lr
·ϕ2cosϕ − lr
··ϕsenϕ)i + (−l1·
θ2senθ + l1··θcosθ − lr
·ϕ2senϕ − lr
··ϕcosϕ)j

Then by a similar analysis such as for the wing the general or governing equations for the mechanism are as follows
15.- � For the horizontal analysis
16.- � For the vertical analysis
From this two constraints the position, velocity and acceleration for the mechanism will be completely determined.
Position.
From equations 15 and 16
� �
and by squaring and rewriting this two equations the result os the following quadratic equation
17.- �
which can be solved by the general formula resulting on the position X as follows:
18.- �
Then by direct substitution
19.- �
With equations 18 and 19 the position problem for the legs mechanism is completely solved.
Velocity
20.- �
21.- �
Equations 20 and 21 are obtained by direct derivation of equations 15 and 16 and are the governing equations for the velocity of the mechanism.
22.- �
l1cosθ + l2cosρ − X = 0
l1senθ − l2senρ − V = 0
l2cosρ = X − l1cosθl2senρ = − V + l1senθ
X2 − 2Xl1cosθ + V 2 + l12 − l2
2 − 2Vl1senθ
X = l1cosθ ± l21 cos2θ − (V 2 + l2
1 − l22 − 2Vl1senθ )
ρ = 2arcTan(−V + l1senθ
l2 + X − l1cosθ)
−l1·θsenθ − l2
·ρsenρ − ·X = 0
l1·θcosθ − l2
·ρcosρ = 0
·ρ =l1
·θcosθl2cosρ

23.- �
With equations 22 and 23 the velocity problem fo the mechanism is completely solved.
Acceleration
24.- �
25.- �
Equations 24 and 25 have been obtained by direct derivation of 20 and 21 or which is the same derive twice equations 15 and 16, then by simply solving the two unknowns by two equations system the following results are obtained
26.- �
27.- �
Finally with equations 26 and 27 the acceleration problem is completely solved for any moment in the legs mechanism.
Specific kinematics for the point P of the legs mechanism
On Image 4 can be appreciated the specific point with marked with letter P, the following analysis have been done for that point.
First it is important to define the new variable phi, which is in terms of the previously determined rho and a constant angle of the rigid link defined with the greek letter eta.
�
Position vector:
28.- �
By direct derivation of equation 28 is obtained the following equation which represents the velocity vector
29.- �
And finally by a similar procedure the equation 29 is derived or which is the same derive equation 28 twice
30.- �
·X = − l1·θsenθ − l2
·ρsenρ
−l1··θsenθ − l1
·θ2cosθ − l2
··ρsenρ − l2·
ρ2cosρ − ··X = 0
l1··θcosθ − l1
·θ2senθ − l2
··ρcosρ − +l2·
ρ2senρ = 0
··ρ =l1
··θcosθ − l1·
θ2senθ + l2·
ρ2senρl2cosρ
··X = − l1··θsenθ − l1
·θ2cosθ − l2
··ρsenρ − l2·
ρ2cosρ
ϕ = η + ρ
rp = (l1cosθ + lrcosϕ)i + ((l1senθ − lrsenϕ)j
·rp = (−l1·θsenθ − lr
·ϕsenϕ)i + (l1·θcosθ − lr
·ϕcosϕ)j
··rp = (−l1··θsenθ − l1
·θ2cosθ − lr
··ϕsenϕ − lr·
ϕ2cosϕ)i + (l1··θcosθ − l1
·θ2senθ − lr
··ϕcosϕ + lr·
ϕ2senϕ)j

This equation (30) represents the acceleration vector for the specific point at any moment.
Through equations 28 to 30 then the specific kinematics of the legs mechanism is completely solved.
Virtual Prototype
Once the corresponding simulations and kinematics for the mechanism were done the virtual prototype have been constructed. The software used for the design of this prototype was Inventor, software CAD 3D and for mechanical design. On the following three images can be appreciated the mechanism from different views and its corresponding description.
Image 16 On this image can be appreciated the mechanism from an isometric view. This image shows the general assembled mechanism, on it can be appreciated the four bar linkage which gives the main movement to the wings. The mechanism is made up of a straight crank (1), the rigid triangle where the wing is pivoted (2) and the curved rocker link ( 3), this curved form has been done to avoid collision between the conector and the rocker.
Image 17The image at left shows the mechanism from a front top view where both wings linkages are mounted over one main structure.The fixed link of each one of the wings linkages is actually fixed in regard to those links but in fact this link is attached to another mobile mechanism. The intention of this assembly is to have the possibility to fold and unfold the wings.
12
3

Image 18On image 18 the mechanism is viewed form the bottom-front. This view allows to see the fold/unfold mechanism, which consists of an absolute fixed base (4), a T-shape link (5), which moves in straight line, an L-shape link (6) and a conector link (7). Practically the mechanism works as an articulated square, with the difference that the mechanism have been adapted to have the same heigh in both sides, that is to say, the L-shape links are aligned, this have been done with the intention that when the wings are assembled they remains at the same heigh.
Virtual Prototype for the legs mechanism
Image 19On the image is shown the virtual assembly for the legs mechanism of the bee prototype, this assembly is for the one side legs. The leg itself will be assembled on the remaining joint of the rigid triangular link and as it can be appreciated at the specific moment two legs are lying on the floor while the middle leg is on the air.
Image 20On the image can be appreciated the mechanism corresponding to the oposite side in regard to the image 19, as it can be seen this image is coincident according to the walking pattern of the bee, that is to say, the middle leg is lying on the floor while the extremes legs are on the air.
4
5
6
7

Numerical Simulation
Numerical simulation for the wing mechanism
The numerical simulation were done using the add-on for MatLab called Simscape. In this section are presented the results obtained through the annexed diagram (annex I) and their discussion
Graphic 7
As expected the trajectory of the synthesized mechanism is an eight-shape trajectory, which is the desired trajectory according to the movements analysis. The graphic 7 is presented on differentials which means that represents the change between both directions.
Graphic 8

Graphic 9
Graphics 8 and 9 shows the behavior of the X speed and the Y speed vs time respectively.The behavior of this two variables, as can be corroborated on the graphics, is very similar, this behavior is related to the P point shown on image 14, and by consequence the behavior along the leading edge of each wing also will be similar.
Numerical simulation for the leg mechanism
Graphic 10On image 10 is shown the simple oval trajectory initially suggested, this trajectory is again represented on differentials which means that relates the change between them.

Graphic 11
Graphic 12
Graphics 11 and 12 represents the X velocity and Y velocity vs time respectively.

Conclusions
Since the conception of the project, as it was expected it have been a challenging task to design a simple, practical and feasible mechanism which can be used on a functional prototype, nevertheless through the knowledge acquired during the synthesis and dynamics of mechanisms course, the work team have successfully designed and integrated two different mechanisms that reproduce the desired movements. The importance of this kind of projects resides on the acquisition of experience and practice on the application of different synthesis methods which is completely necessary when designing since the fact that it is complicated to reproduce a trajectory exactly as it is desired, also it is worth to mention that the solution to the synthesis problem can be accelerated if the designer has a deep knowledge of different mechanisms, a valid and practical option through which the designer can learn about this topic is, for example, by reading the Atlas mentioned in this report.
References
[1]Fritz Olaf-Lehmann and Simon Pick The aerodynamic benefit of wing-wing interaction depends on stroke trajectory in flapping insect wings, 2007.
[2]Khalid Al-Widyan, Jorge Angeles, J. Jesús Cervantes SánchezA numerically robust algorithm to solve the five-pose burmester problem, 2002
[3]John A. Hrones, George L. NelsonAnalysis of the Four Bar Linkage, Its Application to the Synthesis of Mechanism
Yi Qin, Bo Cheng, Xi Yan Trajectory optimization of flapping wings modeled as a three degree of freedoms oscillation system
C. P. Ellington The aerodynamics of hovering insect flight III. Kinematics. Philosophical transactions of the royal society of London. Series B. Biological sciences, pp 41-75, 1984
Hugo I. Medellín CastilloApuntes de la materia de síntesis y dinámica de mecanismos, Facultad de Ingeniería, UASLP, 2011

Annex I. Simscape diagram for the wing Four bar Linkage

Annex II. Simscape diagram for the leg four bar linkage

Annex III. MatLab synthesis codeclear;close all;clc; syms a_x a_y b_x b_y %Coord r0=[0 ;0]; r1=[-1.428; -0.595]; r2=[-3.671; -0.0066]; r3=[-1.576;0.757]; r4=[2.658;-0.612]; I=eye(2); phi0=140; %Referencia phi=[140-phi0;90-phi0;38-phi0;44-phi0]; a0=[a_x;a_y]; b=[b_x;b_y]; a0_t=transpose(a0); b_t=transpose(b); x=[transpose(b) 1]; %Q Q1=[cosd(phi(1)), -sind(phi(1)) ; sind(phi(1)), cosd(phi(1))]; Q2=[cosd(phi(2)), -sind(phi(2)); sind(phi(2)), cosd(phi(2))]; Q3=[cosd(phi(3)), -sind(phi(3)); sind(phi(3)), cosd(phi(3))]; Q4=[cosd(phi(4)), -sind(phi(4)); sind(phi(4)), cosd(phi(4))]; %A, determicaion a y a* A = [ a 0 _ t * ( I - t r a n s p o s e ( Q 1 ) ) -transpose(r1), transpose(r1)*(Q1*a0+(r1/2));... a0_t*(I-transpose(Q2))-transpose(r2), transpose(r2)*(Q2*a0+(r2/2));... a0_t*(I-transpose(Q3))-transpose(r3), transpose(r3)*(Q3*a0+(r3/2)); ... a0_t*(I-transpose(Q4))-transpose(r4), transpose(r4)*(Q4*a0+(r4/2));]; deltaA1= [A(2,1),A(2,2),A(2,3); A ( 3 , 1 ) , A ( 3 , 2 ) , A ( 3 , 3 ) ; A(4,1),A(4,2),A(4,3)]; deltaA2= [A(1,1),A(1,2),A(1,3); A ( 3 , 1 ) , A ( 3 , 2 ) , A ( 3 , 3 ) ; A(4,1),A(4,2),A(4,3)]; deltaA3= [A(1,1),A(1,2),A(1,3); A ( 2 , 1 ) , A ( 2 , 2 ) , A ( 2 , 3 ) ; A(4,1),A(4,2),A(4,3)]; deltaA4= [A(1,1),A(1,2),A(1,3); A ( 2 , 1 ) , A ( 2 , 2 ) , A ( 2 , 3 ) ; A(3,1),A(3,2),A(3,3)]; CA1=det(deltaA1); CA2=det(deltaA2); CA3=det(deltaA3); CA4=det(deltaA4); %plot a y a* figure(1) whitebg('w'); P0=ezplot(CA1); hold on
PA1=ezplot(CA2); hold on PA2=ezplot(CA3); hold on PA3=ezplot(CA4); hold on grid on title ('Juntas A') set(P0,'color','b','linewidth',2); set(PA1,'Color','g','linewidth',2); set(PA2,'Color','r','linewidth',2); set(PA3,'Color','k','linewidth',1); %axis([-2 2 -2 2]); %B b y b* B=[b_t *(I-Q1) + transpose(r1)*Q1 , - transpose(r1)*(b-(r1/2));... b_t *(I-Q2) + transpose(r2)*Q2 , - transpose(r2)*(b-(r2/2));... b_t *(I-Q3) + transpose(r3)*Q3 , - transpose(r3)*(b-(r3/2));... b_t *(I-Q4) + transpose(r4)*Q4 , - transpose(r4)*(b-(r4/2))];
deltaB1= [B(2,1),B(2,2),B(2,3); B ( 3 , 1 ) , B ( 3 , 2 ) , B ( 3 , 3 ) ; B(4,1),B(4,2),B(4,3)]; deltaB2= [B(1,1),B(1,2),B(1,3); B ( 3 , 1 ) , B ( 3 , 2 ) , B ( 3 , 3 ) ; B(4,1),B(4,2),B(4,3)]; deltaB3= [B(1,1),B(1,2),B(1,3); B ( 2 , 1 ) , B ( 2 , 2 ) , B ( 2 , 3 ) ; B(4,1),B(4,2),B(4,3)]; deltaB4= [B(1,1),B(1,2),B(1,3); B ( 2 , 1 ) , B ( 2 , 2 ) , B ( 2 , 3 ) ; B(3,1),B(3,2),B(3,3)];
CB1=det(deltaB1); CB2=det(deltaB2); CB3=det(deltaB3); CB4=det(deltaB4); %plot b y b* figure(2) whitebg('w'); PB0=ezplot(CB1); hold on PB1=ezplot(CB2); hold on PB2=ezplot(CB3); hold on PB3=ezplot(CB4); hold on grid on title ('Pivotes B') set(PB0,'Color','b','linewidth',2); set(PB1,'Color','g','linewidth',2); set(PB2,'Color','r','linewidth',2); set(PB3,’Color’,'k','linewidth',1);