Bifurcation analysis of a semiconductor laser with two filtered optical feedback loops
150
Bifurcation analysis of a semiconductor laser with two filtered optical feedback loops Piotr Marek Slowi ´ nski Department of Engineering Mathematics University of Bristol A dissertation submitted to the University of Bristol in accordance with the requirements of the degree of Doctor of Philosophy in the Faculty of Engineering. May 2011
-
Upload
mpiotr -
Category
Technology
-
view
3.117 -
download
3
description
The advances in the field of optical communication have been transforming the modern world for over 30 years. Main elements of this revolution are semiconductor lasers and optical fibers. Their performance is the main factor that limits operation and throughput of fiber-optic networks. In my work I consider a semiconductor laser subject to filtered optical feedback from two filtering elements —- the 2FOF laser for short. The motivation for this study comes from applications where two filters are used to control and stabilise the laser output. I present an analysis of the basic solutions of the 2FOF laser as described by a mathematical model with delay due to the travel time in the two filter loops. In particular, I compute and represent the solutions as surfaces in a suitable space of parameters and phase space variables. This geometric approach allows me to perform a multi-parameter analysis of the 2FOF laser, which in turn provides comprehensive insight into the solution structure and dynamics of the system. As I show, compared to a laser with a single filtered optical feedback loop, the introduction of the second filter significantly influences the solution structure and, therefore, laser operation.
Transcript of Bifurcation analysis of a semiconductor laser with two filtered optical feedback loops

Bifurcation analysis of a semiconductor laser
with two filtered optical feedback loops
Piotr Marek Słowi nski
Department of Engineering Mathematics
University of Bristol
A dissertation submitted to the University of Bristol in
accordance with the requirements of the degree of
Doctor of Philosophy in the Faculty of Engineering.
May 2011


Abstract
We study the solution structure and dynamics of a semiconductor laser receiving delayedfiltered optical feedback from two filter loops; this system is also referredto as the 2FOF laser.The motivation for this study comes from optical communication applications where two filtersare used to control and stabilize the laser output. The overall mathematical model of the 2FOFlaser takes the form of delay differential equations for the (real-valued) inversion of the laser,and the (complex-valued) electric fields of the laser and of the two filters. There are two timedelays that arise from the travel times from the laser to each of the filters andback.
Since, in the optical communication applications the main concern is stable operation ofthe laser source, in our analysis we focus on the continuous-wave solutions of the 2FOF laser.These basic solutions are known as external filtered modes (EFMs), andthey have been studiedfor the case of a laser with only a single filtered optical feedback loop. Nevertheless, comparedto the single FOF laser, the introduction of the second filter significantly influences the structureand stability of the EFMs and, therefore, the laser’s operation.
To analyse the structure and stability of the EFMs we compute and representthem as anEFM surface in(ωs, dCp, Ns)-space of frequencyωs, filter phase differencedCp, and popu-lation inversionNs of the laser. The parameterdCp is a measure of the interference betweenthe two filter fields, and it is identified as a key to the EFM structure. To analysehow the struc-ture and stability of the EFMs depend on all the filter and feedback loop parameters, we makeextensive use of numerical continuation techniques for delay differential equations and asso-ciated transcendental equations. Furthermore, we use singularity theoryto explain changes ofthe EFM surface in terms of the generic transitions through its critical points. Presented in thiswork is a comprehensive picture of the dependence of the EFM surfaceand associated EFMstability regions on all filter and feedback loop parameters. Our theoreticalresults allow us tomake certain predictions about the operation of a real 2FOF laser device.Furthermore, theyshow that many other laser systems subject to optical feedback can be considered as limitingcases of the 2FOF laser.
Overall, the EFM surface is the natural object that one should consider tounderstand dy-namical properties of the 2FOF laser. Our geometric approach allows us to perform a multi-parameter analysis of the 2FOF laser model and provides a compact way ofunderstandingthe EFM solutions. More generally, our study showcases the state-of-the-art of what can beachieved in the study of delay equations with considerable number of parameters with ad-vanced tools of numerical bifurcation analysis.


Acknowledgements
First of all, I would like to thank my supervisors Prof. Bernd Krauskopf and Dr. Sebastian
M. Wieczorek. Their support and encouragement made my PhD project and stay in Bristol a
great experience, and their wise guidance made an invaluable contributionto my research and
development. Additional thanks go to Dr. Harmut Erzgräber. His publishedworks, as well as
private communication, helped me to establish my research project. Furthermore, I would like
to thank Prof. Dirk Roose and Dr. David A. W. Barton, who agreed to review my dissertation.
I greatly appreciate all financial support I received during my PhD. The Great Western
Research Initiative funded my PhD research under studentship number 250, with support from
Bookham Technology PLC (now Oclaro Inc.). The Bristol Center for Applied Nonlinear Math-
ematics provided support during the write-up of this thesis. The Society forIndustrial and Ap-
plied Mathematics granted me a SIAM Student Travel Award to attend the SIAM Conference
on Applications of Dynamical Systems in May 2009 at Snowbird, Utah. The European Com-
mission Marie Curie fellowship supported my attendance at the TC4 SICON event in Lyon,
France, in March 2009. The Centre de Recherches Mathématiques supported my attendance
at the workshop and mini-conference on "Path Following and Boundary Value Problems" in
Montréal, Canada, in July 2007.
Finally, I would like to thank the Department of Engineering Mathematics and the Uni-
versity of Bristol for providing a creative environment and supporting all my other research
activities. During my stay at the Applied Nonlinear Mathematics research group I met many
inspiring people who became my friends and colleagues. For this I am especially grateful.


“The mathematical description of the world depends on a delicate interplay between discrete
and continuous objects. Discrete phenomena are perceived first, but continuous ones have a
simpler description in terms of the traditional calculus. Singularity theory describes the birth
of discrete objects from smooth, continuous sources.
The main lesson of singularity theory is that, while the diversity of general possibilities is
enormous, in most cases only some standard phenomena occur. It is possible and useful to
study those standard phenomena once for all times and recognize them as the elements of
more complicated phenomena, which are combinations of those standard elements.”
V.I. Arnold


Author’s Declaration
I declare that the work in this dissertation was carried out in accordance with the require-
ments of the University’s Regulations and Code of Practice for ResearchDegree Programmes
and that it has not been submitted for any other academic award. Except where indicated by
specific reference in the text, the work is the candidate’s own work. Workdone in collabora-
tion with, or with the assistance of, others, is indicated as such. Any views expressed in the
dissertation are those of the author.
Signed:
Dated:


Contents
1 Introduction 1
1.1 Modelling the 2FOF laser . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2 Outline of the thesis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2 Classification of EFM structure 11
2.1 External filtered modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.1.1 EFM components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.1.2 EFM components for two identical filters . . . . . . . . . . . . . . . . 17
2.2 The EFM-surface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.3 Classification of the EFM surface fordτ = 0 . . . . . . . . . . . . . . . . . . 24
2.3.1 Dependence of the EFM components for fixeddCp = 0 on the detunings 25
2.3.2 EFM surface types withdCp-independent number of EFM components 30
2.3.3 Transitions of the EFM surface . . . . . . . . . . . . . . . . . . . . . . 33
2.3.4 The EFM surface bifurcation diagram in the(∆1, ∆2)-plane for fixedΛ 41
2.4 Dependence of the EFM surface bifurcation diagram on the filter widthΛ . . . 52
2.4.1 Unfolding of the bifurcation at infinity . . . . . . . . . . . . . . . . . . 55
2.4.2 Islands of non-banded EFM surface types . . . . . . . . . . . . . . . .56
2.5 The effect of changing the delay difference∆τ . . . . . . . . . . . . . . . . . 59
2.6 Conclusion and outlook . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
3 EFM stability regions 65
3.1 Dependence of EFM stability onκ . . . . . . . . . . . . . . . . . . . . . . . . 67
3.2 Dependence of EFM stability onΛ . . . . . . . . . . . . . . . . . . . . . . . . 70
3.3 Dependence of EFM stability on∆ . . . . . . . . . . . . . . . . . . . . . . . . 77
3.3.1 Influence of hole creation on EFM stability . . . . . . . . . . . . . . . 79
3.3.2 Influence ofSN -transition on EFM stability . . . . . . . . . . . . . . . 86
3.3.3 Influence ofSω-transition on EFM stability . . . . . . . . . . . . . . . 89
3.3.4 Influence ofSC-transition on EFM stability . . . . . . . . . . . . . . . 94
3.4 Dependence of EFM stability ondτ . . . . . . . . . . . . . . . . . . . . . . . 97
3.5 Different types of bifurcating oscillations . . . . . . . . . . . . . . . . . . . .100
i

CONTENTS ii
4 Overall summary 105
4.1 Physical relevance of findings . . . . . . . . . . . . . . . . . . . . . . . . . .107
4.1.1 Experimental techniques for the control of parameters . . . . . . . . . 107
4.1.2 Expected experimental results . . . . . . . . . . . . . . . . . . . . . . 108
4.1.3 Existence of multistability . . . . . . . . . . . . . . . . . . . . . . . . 110
Bibliography 113
Appendices 121
A How to construct the EFM surface 121
A.1 Dealing with theS1-symmetry of the 2FOF laser model . . . . . . . . . . . . . 122
A.2 Computation and rendering of the EFM surface . . . . . . . . . . . . . . . . .123
A.3 Determining the stability of EFMs . . . . . . . . . . . . . . . . . . . . . . . . 125

List of Tables
1.1 System parameters and their values. . . . . . . . . . . . . . . . . . . . . . . . 7
2.1 Notation and parameter values for the types of EFM-surface in figure 2.11.
The second and third column show the minimal numberCmin and the maximal
numberCmax of EFM components (for suitable fixeddCp) of the type; note
that in all cases the number of EFM components is independent ofdCp . . . . . 33
2.2 Notation and parameter values for the types of EFM-surface in figure 2.18;
the second and third column show the minimal numberCmin and the maximal
numberCmax of EFM components (for suitable fixeddCp) of the type. . . . . . 44
2.3 Notation and parameter values for the types of EFM-surface in figure 2.21;
the second and third column show the minimal numberCmin and the maximal
numberCmax of EFM components (for suitable fixeddCp) of the type. . . . . . 48
3.1 Axes ranges for all the panels in figure 3.6 . . . . . . . . . . . . . . . . . . .. 81
iii

List of Figures
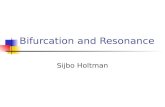
1.1 Sketch of a 2FOF semiconductor laser realized by coupling to an optical fiber
with two fibre Bragg gratings (a), and by two (unidirectional) feedback loops
with Fabry-Pérot filters (b); other optical elements are beam splitters (BS)and
optical isolators (ISO). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
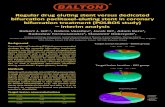
1.2 Spectrum of light transmitted (left scale) or reflected (right scale) by aFabry-
Pérot filter (black) and by a fibre Bragg grating (grey). The peak is atthe filter’s
central frequency∆, and the filter widthΛ is defined as the full width at half
maximum. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.1 The graph of (2.3) (black curve) oscillates between its envelope (grey curve)
given by (2.9). Frequencies of EFMs (blue dots) are found from intersection
points of the graph ofΩ(ωs) with the diagonal; also shown are the intersection
points (black dots) with the envelope. HereC1p = 0, C2
p = π/3, ∆1 = −0.1,
∆2 = 0.05, κ1 = 0.05, κ2 = 0.025, Λ1 = Λ2 = 0.005, τ1 = 500 andτ2 = 400. 13
2.2 Projection of EFMs branches onto the(ωs, Ns)-plane (a) and onto the(ωs, C1p)-
plane (b). The open circles are the starting points for three different types of
branches. The blue branch is the EFM component fordCp = 0, the green
branches are for constantC1p , and the red branches are for constantωs. Here
∆1 = ∆2 = 0, κ1 = κ2 = 0.05, Λ1 = Λ2 = 0.015, dτ1 = τ2 = 500 and the
other parameters are as given in Table 1.1. . . . . . . . . . . . . . . . . . . . . 18
2.3 Representation of the EFM surface in(ωs, Ns, C1p)-space; compare with fig-
ure 2.2. Panel (a) shows one fundamental element of the EFM surface (semi-
transparent grey); superimposed are the EFM branches from figure2.2. The
entire EFM surface is a single smooth surface that is obtain by connecting all
2nπ-translated copies of the surface element shown in panel (a). Panels (b) and
(c) show how the EFM branches for constantC1p and for constantωs, respec-
tively, arise as intersection curves of fixed sections with the EFM surface. . . . 20
iv

LIST OF FIGURES v
2.4 Representation of the EFM surface of figure 2.3 in(ωs, Ns, dCp)-space. Panel
(a) shows one fundamental2π interval of the EFM surface (semitransparent
grey); superimposed are the EFM branches from figure 2.2. The entireEFM
surface consists of all2nπ-translated copies of this compact surface, which
touch at the points(ωs, Ns, dCp) = (0, 0, (2n + 1)π); panel (b) shows this
in projection of the surface onto the(ωs, dCp)-plane. Panel (c) illustrates how
the EFM branches for constantωs and the outer-most EFM component for
dCp = 2nπ arise as intersection curves with planar sections. . . . . . . . . . . 22
2.5 EFM-components arising as sections through the EFM surface of figure 2.4.
Panel (a) shows the EFM-surface in(ωs, Ns, dCp)-space, intersected with the
planes defined bydCp = 0 anddCp = 0.9π, respectively. Panels (b1) and
(c1) show the corresponding envelope (grey curves) given by (2.9). The black
solution curve of (2.3) inside it is forC1p = 0; it gives rise to the marked blue
EFMs. Panels (b2) and (c2) show the two respective EFM-components and
individual EFMs (blue dots) in the(ωs, dCp)-plane. . . . . . . . . . . . . . . . 23
2.6 Envelope and solution curve fordCp = 0 (a1)-(d1) and the corresponding
EFM-components and EFMs (blue dots) of the 2FOF laser, were∆1 = 0.2 is
fixed and in panels (a)-(d)∆2 takes the values−0.2, 0, 0.158 and0.2, respec-
tively; hereΛ1 = Λ2 = 0.015, τ1 = τ2 = 500 and the other parameters are as
given in Table 1.1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.7 Regions in the(∆1, ∆2)-plane with a one, two or three EFM components of
the 2FOF laser fordCp = 0. From (a) to (f)Λ takes the valuesΛ = 0, Λ =
0.001, Λ = 0.01, Λ = 0.06, Λ = 0.12 andΛ = 0.14. . . . . . . . . . . . . . . 28
2.8 Panel (a) shows surfaces (orange and grey) that divide the(∆1, ∆2, Λ)-space
into regions with one, two and three EFM-components of the 2FOF laser for
dCp = 0; in the shown (semitransparent) horizontal cross section forΛ = 0.01
one finds the bifurcation diagram from figure 2.7 (c) . Panel (b) showsthe
bifurcation diagram in the(∆1, Λ)-plane for fixed∆2 = 0.82; the light grey
curve is the boundary curve for the limiting single FOF laser for∆2 = ∞.
Panel (c) shows the projection onto the(∆1, Λ)-plane of the section along the
diagonal∆1 = ∆2 through the surfaces in panel (a). . . . . . . . . . . . . . . 30
2.9 The EFM surface in(ωs, dCp, Ns)-space showing caseB for ∆1 = ∆2 = 0
(a), and showing caseBBB for ∆1 = 0.16, ∆2 = −0.16 (b), whereΛ = 0.015. 31

LIST OF FIGURES vi
2.10 Boundary curves (orange or grey) in the(∆1, ∆2)-plane forΛ = 0.01 for
61 equidistant values ofdCp from the interval[−π, π]; compare with fig-
ure 2.7 (c). In the white regions the 2FOF laser has one, two or three EFM
components independently of the value ofdCp, as is indicated by the labelling
with symbolsB andB; representatives of the four types of EFM components
can be found in figure 2.11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.11 The four simple banded types of EFM-surface of the 2FOF laser in thela-
belled regions of figure 2.10, represented by the projection (shaded) onto the
(ωs, dCp)-plane; the blue boundary curves are found directly from (2.16). For
notation and the corresponding values of∆1 and∆2 see Table 2.1; in all panels
ωs ∈ [−0.3, 0.3] anddCp ∈ [−π, π]. . . . . . . . . . . . . . . . . . . . . . . 33
2.12 Minimax transitionM of the EFM-surface in (ωs, dCp, Ns)-space, where a
connected component of the EFM surface (a1) shrinks to a point (b1).Panels
(a2) and (b2) show the corresponding projection onto the (ωs, dCp)-plane of
the entire EFM surface; the local region where the transitionM occurs is high-
lighted by dashed lines and the projections of the part of the EFM surface in
panels (a1) and (b1) is shaded grey. HereΛ = 0.01, ∆1 = 0.4, and∆2 = 0.28
in (a) and∆2 = 0.28943 in (b). . . . . . . . . . . . . . . . . . . . . . . . . . . 36
2.13 Saddle transitionSC of the EFM-surface in (ωs, dCp, Ns)-space, where lo-
cally the surface changes from a one-sheeted hyperboloid (a1) to a cone aligned
in the dCp-direction (b1) to a two-sheeted hyperboloid (c1). Panels (a2)–
(c2) show the corresponding projection onto the (ωs, dCp)-plane of the entire
EFM surface; the local region where the transitionSC occurs is highlighted
by dashed lines and the projections of the part of the EFM surface in panels
(a1)–(c1) is shaded grey. HereΛ = 0.01, ∆1 = 0.4, and∆2 = 0.23 in (a),
∆2 = 0.232745 in (b) and∆2 = 0.24 in (c). . . . . . . . . . . . . . . . . . . . 37
2.14 Saddle transitionSω of the EFM-surface in (ωs, dCp, Ns)-space, where a con-
nected component (a1) pinches (b1) and then locally disconnects (c1);here the
associated local cone in panel (b1) is aligned in theωs-direction. Panels (a2)–
(c2) show the corresponding projection onto the (ωs, dCp)-plane of the entire
EFM surface; the local region where the transitionSω occurs is highlighted
by dashed lines and the projections of the part of the EFM surface in panels
(a1)–(c1) is shaded grey. HereΛ = 0.01, ∆1 = 0.4, and∆2 = 0.13 in (a),
∆2 = 0.133535 in (b) and∆2 = 0.135 in (c). . . . . . . . . . . . . . . . . . . 38

LIST OF FIGURES vii
2.15 Saddle transitionSN of the EFM-surface in (ωs, dCp, Ns)-space, where two
sheets that lie on top of each other in theNs direction (a1) connect at a point
(b1) and then create a hole in the surface (c1); here the associated local cone
in panel (b1) is aligned in theN -direction. Panels (a2)–(c2) show the corre-
sponding projection onto the (ωs, dCp)-plane of the entire EFM surface; the
local region where the transitionSN occurs is highlighted by dashed lines and
the projections of the part of the EFM surface in panels (a1)–(c1) is shaded
grey. HereΛ = 0.01, ∆1 = 0.4, and∆2 = 0.0.11 in (a),∆2 = 0.11085 in (b)
and∆2 = 0.1115 in (c). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
2.16 Cubic tangencyC of the EFM-surface in (ωs, dCp, Ns)-space, where a part
of the surface (a1) becomes tangent to a planedCp = const (b1) and then
develops a bulge (c1). The unfolding of the cubic tangency into twodCp-folds
can be seen clearly in the projections onto the (ωs, dCp)-plane in panels (a2)–
(c2). HereΛ = 0.015, and(∆1, ∆2) = (−0.03,−0.0301) in (a), (∆1, ∆2) =
(−0.04,−0.0401) in (b) and(∆1, ∆2) = (−0.05,−0.051). . . . . . . . . . . . 40
2.17 EFM surface bifurcation diagram in the(∆1, ∆2)-plane forΛ = 0.01 with
regions of different types of the EFM surface; see figure 2.18 for representa-
tives of the labelled types of the EFM surface and Table 2.2 for the notation.
The main boundary curves are the singularity transitionsM (orange curves),
SC (blue curves),Sω (green curves) andSN (red curves). The locus of cu-
bic tangency (black curves) can be found near the diagonal; also shown is the
anti-diagonal. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
2.18 Additional types of EFM-surface of the 2FOF laser in the labelled regions of
figure 2.17, represented by the projection (shaded) onto the (ωs, dCp)-plane;
the blue boundary curves are found directly from (2.16). For notation and
the corresponding values of∆1 and ∆2 see Table 2.2; in all panelsωs ∈[−0.3, 0.3] anddCp ∈ [−π, π]. . . . . . . . . . . . . . . . . . . . . . . . . . 43
2.19 Projection of the EFM-surface onto (ωs, dCp)-plane forΛ = 0.01. Panel (a) is
for ∆1 = −∆2 = 0.003 and panel (b) is for∆1 = −∆2 = 0.08. . . . . . . . . 45
2.20 Enlargement near the center of the(∆1, ∆2)-plane of figure 2.17 with (blue)
curves ofSC transition, (red) curves ofSN transition, and (black) curvesCa
and (grey) curvesCd of cubic tangency; see figure 2.21 for representatives of
the labelled types of the EFM surface and Table 2.3 for the notation. . . . . . .46

LIST OF FIGURES viii
2.21 Additional types of EFM-surface of the 2FOF laser that feature bulges, repre-
sented by the projection (shaded) onto the (ωs, dCp)-plane; the blue boundary
curves are found directly from (2.16). Where necessary, insets show local en-
largements. The corresponding regions in the(∆1, ∆2)-plane can be found in
figures 2.20, 2.25 and 2.29; for notation and the corresponding values of∆1,
∆2 andΛ see Table 2.3. In all panelsωs ∈ [−0.3, 0.3] anddCp ∈ [−π, π]. . . 47
2.22 Global manifestation of local saddle transitionSC of the EFM-surface where
two bulges connect to form a hole. Panels (a1)–(c1) show the relevantpart of
the EFM surface and panels (a2)–(c2) the corresponding projection onto the
(ωs, dCp)-plane. HereΛ = 0.015 and∆2 = −0.02, and∆1 = −0.0248 in
(a),∆1 = −0.02498 in (b) and∆1 = −0.0252 in (c). . . . . . . . . . . . . . . 49
2.23 Sketch of the bifurcation diagram in the(∆1, ∆2)-plane near the (purple)
codimension-two pointDCNC on the curveC of cubic tangency, from which
the (red) curveSN and the (blue) curveSC of saddle transition emanate; com-
pare with figures 2.20 and 2.29 (a) and (b). . . . . . . . . . . . . . . . . . . . .50
2.24 Sketch of the bifurcation diagram in the(∆1, ∆2)-plane near the (golden)
codimension-two pointDCMω on the curveC of cubic tangency, from which
the (orange) curveM and the (green) curveSω of saddle transition emanate;
compare with figures 2.17 and 2.28. . . . . . . . . . . . . . . . . . . . . . . . 50
2.25 Enlargement near the diagonal of the(∆1, ∆2)-plane with (blue) curves ofSC
transition, (green) curves ofSω transition, andSC transition, and (black) curves
Cd of cubic tangency; see figure 2.21 for representatives of the labelled types
of the EFM surface and Table 2.3 for the notation. Panel (a) is forΛ = 0.01 as
figure 2.17, and panel (b) is forΛ = 0.02 . . . . . . . . . . . . . . . . . . . . 52
2.26 EFM surface bifurcation diagram in the compactified(∆1, ∆2)-square,[−1, 1]×[−1, 1], showing regions of band-like EFM surface types; compare with fig-
ure 2.10. The boundary of the square corresponds to∆i = ±∞; from (a) to
(e) Λ takes valuesΛ = 0.01, Λ = 0.015, Λ = 0.06, Λ = 0.098131, Λ = 0.1
andΛ = 0.13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
2.27 Sketch of EFM surface bifurcation diagram near the boundary∆2 = −1 of
the(∆1, ∆2)-square in the transition throughΛ = ΛC . Panels (a1)–(a3) show
the transition involving the (black) curveCa of cubic tangency that bounds the
orange islands, and panels (b1)–(b3) show the transition involving the (grey)
curve Cd of cubic tangency that bounds the grey islands; compare with fig-
ure 2.26 (c)–(e). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
2.28 Grey island forΛ = 0.1 in the (∆1, ∆2)-plane with regions of non-banded
EFM surface types; compare with figure 2.26 (e). . . . . . . . . . . . . . . . .56

LIST OF FIGURES ix
2.29 Orange island in the(∆1, ∆2)-plane with regions of non-banded EFM surface
types; the inset in panel (a) shows the details of curves and regions. From (a)
to (d) Λ takes the valuesΛ = 0.1, Λ = 0.145, Λ = 0.166 andΛ = 0.179;
compare panel (a) with figure 2.26 (e). . . . . . . . . . . . . . . . . . . . . . . 58
2.30 The EFM surface (a) forκ = 0.05, ∆1 = ∆2 = 0, Λ = 0.015, andτ1 = 500
andτ2 = 600 so thatdτ = 100, and its intersection with the planes defined by
dCp = 0 anddCp = −π; compare with figure 2.5. Panels (b)–(e) show the
EFM-components fordCp = 0, dCp = −π/2, dCp = −π anddCp = −3π/2,
respectively; the blue dots are the EFMs forC1p as given by (2.12). . . . . . . . 60
2.31 Solution curves of the transcendental equation (2.3) and corresponding EFM
components fordCp = 0, where the dots show the actual EFMs forC1p=0;
hereκ = 0.05, ∆1 = ∆2 = 0, Λ = 0.015, τ1 = 500, anddτ = 200 in panels
(a) anddτ = 300 in panels (b). The inset of panel (b2) shows that the EFM
components are in fact disjoint. . . . . . . . . . . . . . . . . . . . . . . . . . . 61
2.32 The EFM surface of typehBB for dτ = 0 (a1) and its EFM components for
dCp = −1.6π (a2), and the corresponding sheared EFM surface fordτ = 230
(b1) and its EFM components fordCp = −1.6π (b2). Hereκ = 0.05, ∆1 =
0.13, ∆2 = −0.1, Λ = 0.01, andτ1 = 500. . . . . . . . . . . . . . . . . . . . 62
3.1 Dependence of the EFM surface on the feedback rateκ (as indicated in the
panels); here∆1 = ∆2 = 0, Λ = 0.015 and dτ = 0. Panels (a1)–(c1)
show the EFM-surface in(ωs, Ns, dCp)-space (semitransparent grey) together
with information about the stability of the EFMs. Panels (a2)–(c2) show cor-
responding projections of the EFM surface onto the(ωs, Ns)-plane and pan-
els (a3)–(c3) onto the(ωs, dCp)-plane. Regions of stable EFMs (green) are
bounded by Hopf bifurcations curves (red) and saddle node bifurcation curves
(blue). In panels (a1)–(c1)ωs ∈ [−0.065, 0.065], dCp/π ∈ [−1, 1] and
Ns ∈ [−0.013, 0.013]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
3.2 Dependence of the EFM surface on the filter widthΛ = Λ1 = Λ2 (as in-
dicated); here∆1 = ∆2 = 0, κ = 0.01 anddτ = 0. Light grey regions
with black envelopes are projections, for five different values ofΛ, of the EFM
surface onto the(ωs, Ns)-plane. . . . . . . . . . . . . . . . . . . . . . . . . . 70

LIST OF FIGURES x
3.3 Dependence of the stability region on the EFM surface on the common filter
width Λ (as indicated in the panels); here∆1 = ∆2 = 0, κ = 0.01 anddτ = 0.
Panels (a1)–(d1) show the EFM-surface in(ωs, Ns, dCp)-space (semitrans-
parent grey) together with information about the stability of the EFMs. Pan-
els (a2)–(d2) show corresponding projections of the EFM surface onto the
(ωs, Ns)-plane. Black dots indicate codimension-two Bogdanov-Takens bi-
furcation points; curves and regions are coloured as in figure 3.1. In panels
(a1)–(d1)dCp ∈ [−π, π], and the ranges ofNs andωs are as in panels (a2)–(d2). 72
3.4 Projections of the EFM surfaces presented in figure 3.3 (a1)–(d1) onto the
(ωs, dCp)-plane. Black dots indicate codimension-two Bogdanov-Takens bi-
furcation points; curves and regions are coloured as in figure 3.1. . . . .. . . . 73
3.5 Projections of the EFM surface onto the(ωs, Ns)-plane, for increasing filter
width Λ as indicated in the panels; here∆1 = ∆2 = 0, κ = 0.01 anddτ =
0. Black dots indicate codimension-two Bogdanov-Takens bifurcation points;
curves and regions are coloured as in figure 3.1. . . . . . . . . . . . . . . .. . 75
3.6 Influence of local saddle transitionSC , where two bulges connect to form a
hole, on the stability of the EFMs; here∆2 = 0, κ = 0.01, Λ = 0.005 and
dτ = 0. Panels (a1)–(c1) shows two copies of the fundamental2π-interval
of the EFM surface for different values of a detuning∆1, as indicated in the
panels. Panels (a2)–(c2) show enlargements of the region where the hole is
formed. In panels (a1)–(c1) the limit of thedCp-axis corresponds to a planar
section that goes through middle of the hole in panels (a2)–(c2). For the spe-
cific axes ranges see Table 3.1; curves and regions are coloured as infigure 3.1. 80
3.7 Projections with stability information of the EFM surface in figure 3.6 onto
the (ωs, dCp)-plane, shown for increasing filter detuning∆1 = 0.0005 (a),
∆1 = 0.0007 (b) and∆1 = 0.005 (c); here∆2 = 0, κ = 0.01, Λ = 0.005 and
dτ = 0. To illustrate the changes in the EFM surface, panels (a1)–(c1) show
the2π interval of the EFM surface that is shifted byπ with respect to the fun-
damental2π interval of the EFM-surface. Panels (a2)–(c2) show enlargements
of the central part of panels (a1)–(c1). Curves and regions are coloured as in
figure 3.1; dark green colour indicates that there are two stable regions on the
EFM surface that lie above one another in theNs direction. . . . . . . . . . . . 82
3.8 The EFM surface with stability information for filters detunings∆1 = 0.024
and∆2 = 0. Hereκ = 0.01, Λ = 0.005 anddτ = 0; curves and regions are
coloured as in figure 3.1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84

LIST OF FIGURES xi
3.9 Projections of the EFM surface with stability information onto the(ωs, dCp)-
plane for increasing filter detuning∆1 = 0.0065 (a),∆1 = 0.0085 (b), ∆1 =
0.0165 (c), ∆1 = 0.0175 (d), ∆1 = 0.0215 (e) and∆1 = 0.024 (f). Here
∆2 = 0, κ = 0.01, Λ = 0.005 anddτ = 0; curves and regions are coloured as
in figure 3.7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
3.10 The EFM surface with stability information for filters detunings∆1 = 0.024
and∆2 = −0.025. Hereκ = 0.01, Λ = 0.005 anddτ = 0; curves and regions
are coloured as in figure 3.1. . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
3.11 Projections of the EFM surface with stability information onto the(ωs, dCp)-
plane for increasing filter detunings∆2 = −0.012 (a), ∆2 = −0.023 (b),
∆2 = −0.024 (c), ∆2 = −0.025 (d). Here∆1 = 0.024, κ = 0.01, Λ = 0.005
anddτ = 0; curves and regions are coloured as in figure 3.7. . . . . . . . . . . 88
3.12 The EFM surface with stability information for∆2 = −0.035 (a), ∆2 =
−0.037 (b). Here∆1 = 0.024, κ = 0.01, Λ = 0.005 anddτ = 0; curves
and regions are coloured as in figure 3.1. . . . . . . . . . . . . . . . . . . . . 90
3.13 Projections of the EFM surface with stability information onto the(ωs, dCp)-
plane for∆1 = 0.024, ∆2 = −0.036 (a), ∆1 = 0.024, ∆2 = −0.037 (b),
∆1 = 0.026, ∆2 = −0.037 (c), ∆1 = 0.029, ∆2 = −0.037 (d), ∆1 =
0.035, ∆2 = −0.037 (e) and∆1 = 0.036, ∆2 = −0.037 (f). Hereκ = 0.01,
Λ = 0.005 anddτ = 0; curves and regions are coloured as in figure 3.7. . . . . 93
3.14 The EFM surface with stability information for∆1 = 0.044 (a), ∆1 = 0.050
(b). Here∆2 = −0.049, κ = 0.01, Λ = 0.005 anddτ = 0; curves and regions
are coloured as in figure 3.1. . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
3.15 Projections of the EFM surface with stability information onto the(ωs, dCp)-
plane for∆1 = 0.039, ∆2 = −0.041 (a), ∆1 = 0.039, ∆2 = −0.045 (b),
∆1 = 0.044, ∆2 = −0.049 (c) and∆1 = 0.050, ∆2 = −0.049 (d). Here
κ = 0.01, Λ = 0.005 anddτ = 0; curves and regions are coloured as in
figure 3.7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
3.16 Projections of the EFM surface with stability information onto the(ωs, dCp)-
plane for increasing delay time in the second feedback loopτ2 = 506 (a),τ2 =
514 (b), τ2 = 562 (c) andτ2 = 750 (d); hereτ1 = 500, κ = 0.01, Λ = 0.015
and∆1 = ∆2 = 0. Black dots indicate codimension-two Bogdanov-Takens
bifurcation points; curves and regions are coloured as in figure 3.7. . . .. . . . 99

xii LIST OF FIGURES
3.17 Example of relaxation oscillations (a) and frequency oscillations (b) found in
the EFM stability diagram in figure 3.7 (c); for∆1 = 0.005, ∆2 = 0, κ = 0.01,
Λ = 0.005 anddτ = 0. RO are found at(ωs, dCp/π) = (0.0035, 1.828), and
FO at(ωs, dCp/π) = (0.0031, 0.802). The different rows show from top to
bottom: the intensityIL and the frequencyφL = dφL/dt of the laser field, the
intensityIF1 and the frequencyφF1 = dφF1/dt of the first filter field, and the
intensityIF2 and the frequencyφF2 = dφF2/dt of the second filter field. Note
the different time scales for ROs and FOs. . . . . . . . . . . . . . . . . . . . . 101
4.1 Regions in the(C1p , dCp)-plane with different numbers of coexisting EFMs,
as indicated by the labelling. Panel (a) shows the regions on a fundamental
2π-interval ofC1p , while panel (b) shows it in the covering space (over several
2π-intervals ofC1p ). Boundaries between regions are saddle-node bifurcation
curves (blue); also shown in panel (b) are periodic copies of the saddle-node
bifurcation curves (light blue). Labels Here∆1 = 0.050, ∆2 = −0.049,
κ = 0.01, Λ = 0.005 anddτ = 0; these parameter values are those for the
EFM surface in figure 3.14 (b). . . . . . . . . . . . . . . . . . . . . . . . . . . 111
4.2 EFM-components (grey) in the(ωs, Ns)-plane with stability information. Panel
(a) is fordCp = π, ∆1 = 0.050, ∆2 = −0.049, and panel (b) is fordCp = −π,
∆1 = 0.036, ∆2 = −0.037; furthermore,κ = 0.01, Λ = 0.005 anddτ = 0.
Stable segments of the EFM-components (green) are bounded by the Hopfbi-
furcations (red dots) or by the saddle-node bifurcation (blue dots). The actual
stable EFMs forC1p = 1.03π (a) andC1
p = 0.9π (b) are the black full circles;
open circles are unstable EFMs. The EFM components in panel (a) correspond
to a constantdCp-section through the EFM surface in figure 3.14 (b), and those
in panel (b) to a constantdCp-section through the EFM surface in figure 3.12 (d).112

Chapter 1
Introduction
Semiconductor lasers are very efficient in transforming electrical energy to coherent light. Co-
herent light is created in the laser by recombination of electron-hole pairs,which are generated
by an electrical pump current. The light is reflected by semitransparent mirrors that form the
laser cavity, and is amplified by stimulated emission during multiple passages through an am-
plifying semiconductor medium. The output light exits through one (or both) ofthe semitrans-
parent mirrors [33, 46]. Semiconductor lasers are small (about 1 millimetre long and several
micrometres wide), can easily be mass produced and are used in their millions in every day
applications — most importantly, in optical telecommunication and optical storage systems.
On the down side, semiconductor lasers are known to be very sensitive to optical influences,
especially in the form of external optical feedback from other optical components (such as
mirrors and lenses) and via coupling to other lasers. Depending on the exact situation, optical
feedback may lead to many different kinds of laser dynamics, from increased stability [6, 23]
all the way to complicated dynamics; for example: a period doubling cascade tochaos [73],
torus break-up [70], and a boundary crisis [69] have been identified. See [33, 38] as entry
points to the extensive literature on the possible dynamics of lasers with opticalfeedback.
The simplest and now classical example of optical feedback is conventional optical feed-
back (COF) where light is reflected on a normal mirror and then re-entersthe laser [43]. How-
ever, other types of laser systems with optical feedback have been considered, including lasers
with two COF feedback loops [54], with incoherent feedback [20], with optoelectronic feed-
back [44], with phase-conjugate feedback (PCF) [7, 37] and with filtered optical feedback
(FOF) [14, 28]. In all these cases an external feedback loop, or external cavity, is associated
with a delay timeτ that arises from the travel time of the light before it re-enters the laser.
Due to the fast time scales within a semiconductor laser (on the order of picoseconds), external
optical paths of a few centimetres lead to considerable delay times that cannotbe ignored. As
a consequence, an optical feedback created by an external cavity allows the laser to operate at
various compound-cavity modes; they are referred to as continuous-wave (cw) states because
1

2 Chapter 1. Introduction
the laser produces constant-intensity output at a specific frequency. The cw-states are the sim-
plest nonzero solutions of the system and they form the backbone for understanding the overall
dynamics, even when they are unstable. For example, the typical dynamics of a COF laser
with irregular drop-outs of the power has been attributed to trajectories thatpass closely near
cw-states of saddle type [25, 58].
A main concern in practical applications is to achieve stable, and possibly tunable, laser op-
eration. One way of achieving this has been to use filtered optical feedback where the reflected
light is spectrally filtered before it re-enters the laser — one speaks of the(single) FOF laser.
As in any optical feedback system, important parameters are the delay time andthe feedback
strength. Moreover, FOF is a form of coherent feedback, meaning that the phase relationship
between outgoing and returning light is also an important parameter. The interest in the FOF
laser is due to the fact that filtering of the reflected light allows additional control over the
behaviour of the output of the system by means of choosing the spectral width of the filter and
its detuning from the laser frequency. The basic idea is that the FOF laser produces stable out-
put at the central frequency of the filter, which is of interest, for example, for achieving stable
frequency tuning of lasers for the telecommunications applications [9].
The single FOF laser system has recently been the subject of a number of experimental
and theoretical studies [15, 18, 22, 23, 27, 28, 31, 51, 64, 74, 76, 77]. Here, we assume that a
solitary laser (i.e. without feedback) emits light of constant intensity and frequencyΩ0. It has
been shown that single FOF can improve the laser performance [6, 23], but it can also induce
a wide range of more complicated dynamics. Its cw-states are called externalfiltered modes
(EFMs) [74], and they lie on closed curves, called EFM-components, in the (ωs, Ns)-plane of
the lasing frequencyωs (relative to the solitary laser frequencyΩ0) and inversionNs of the
laser (the number of electron-hole pairs). The EFM-components are traced out by the EFMs as
the phase of the electric field of the filter (relative to the phase of the laser field), called here the
feedback phaseCp, is varied. An analysis in [28] with dependence on the spectral width of the
filter, Λ, and the detuning between the filter central frequency and the solitary laser frequency,
∆, showed that there may be at most two EFM-components for the FOF laser: one around the
solitary laser frequency and one around the filter central frequency.A stability and bifurcation
analysis of EFMs in [17] shows that the FOF laser is very sensitive to changes in feedback
phaseCp. Furthermore, the filter parametersΛ and∆ have a big influence on the possible
(non steady-state) dynamics [16, 19]. Importantly, in a FOF laser one canobserve not only
the well-known relaxation oscillations, but also so-called frequency oscillations where only the
frequency of the laser oscillates while its intensity remains practically constant[24]. In light
of the strong amplitude-phase coupling of semiconductor lasers, the existence of frequency
oscillations is somewhat surprising, and they are due to an interaction with the flanks of the
filter transmittance profile [16]. An experimental study of the influence of feedback phaseCp
and frequency detuning∆ on the single FOF laser dynamics can be found in [19]. The limiting

3
(a)Laser Optical fiber
Grating 1 Grating 2
(b)Laser
E(t), N(t)
Ω, α, P, T
κ2F2(t, τ2, C2
p)
κ1F1(t, τ1, C1
p)
BS
ISO ISO ISO ISO
Filter 1
F1(t)
Λ1, ∆1
Filter 2
F2(t)
Λ2, ∆2.
.
Figure 1.1. Sketch of a 2FOF semiconductor laser realized by coupling toan optical fiber with two
fibre Bragg gratings (a), and by two (unidirectional) feedback loops with Fabry-Pérot filters (b); other
optical elements are beam splitters (BS) and optical isolators (ISO).
cases of small and largeΛ and∆ have been considered in [28, 31, 74]. In all these studies the
filter transmittance has a single maximum defining its central frequency; the FOFproblem for
periodic filter transmittance with multiple maxima and minima was considered in [64].
Given the large number of parameters and the transcendental nature of the equations for
the EFMs of the single FOF laser, possibilities for their analytical study are somewhat limited;
examples of such studies are the [15, 28, 31]. In [15] asymptotic expansion methods are used
to simplify the rate equations of the FOF laser and to investigate the injection laser limitΛ →0. In [28] dependance of the EFM structure onΛ and ∆ is analysed by reduction of the
transcendental equation for their frequencies to a fourth-degree polynomial. Finally, the study
presented in [31] explores the transition of the FOF laser from the injection laser limit to the
COF laser limit, by analysing the limit casesΛ → 0 andΛ → ∞. Due to limitations of the
analytical approaches, the single FOF laser is analysed mainly by means of numerical methods.
In particular, popular techniques include: root finding, numerical integration and numerical
contiunation. Root finding is used, for example, in [74, 77], to solve transcendental equation
for the frequencies of EFMs. Numerical integration provides means to compare output of
the model with experimental time series; see, for example, [30, 25, 49]. Finally, numerical
continuation allows for very detailed bifurcation analysis of the investigated system; as was
performed for example, in [17].
In a number of applications, such as the design of pump lasers for optical communication

4 Chapter 1. Introduction
Fiber Bragg grating
Fabry–Perot filter
TR
AN
SM
ITT
AN
CE
0%
100%
RE
FL
EC
TA
NC
E
100%
0%
∆ frequency
-Λ
.
.
Figure 1.2. Spectrum of light transmitted (left scale) or reflected (right scale) by a Fabry-Pérot filter
(black) and by a fibre Bragg grating (grey). The peak is at the filter’s central frequency∆, and the filter
width Λ is defined as the full width at half maximum.
systems, the requirements on stable and reliable laser operation at a specificfrequency are so
stringent (especially when the device is on the ocean floor as part of a long-range fiber cable)
that other methods of stabilisation have been considered. One approach isto employ FOF from
two filtered feedback loops to stabilise the output of an (edge emitting) semiconductor laser
[4, 9, 21, 52]. This laser system is referred to as the 2FOF laser for short, and it is the subject of
the study presented here. The main idea is that the second filter provides extra frequency control
over the laser output. In [4] it has been shown that a second filtered feedback loop may indeed
improve the beam quality. Moreover, in [21] an experimental setup has been realized and it was
shown that the laser may show complicated dynamics as well; however, such dynamics have
not yet been investigated further. With the focus on enhanced stability, industrial pump sources
with enhanced wavelength and power stability performance due to a 2FOF design are available
today [52]. The 2FOF laser has also been considered recently for frequency switching [9] and
for sensor applications [59, 60].
The filtered feedback of the 2FOF laser can be realized in two ways: eitherby reflection
from an optical fibre with two fibre Bragg gratings (periodic changes of the refractive index)
at given distances, or by transmission through two unidirectional feedback loops with Fabry-
Pérot filters; see figure 1.1. The two setups are equivalent in the sensethat the overall spectral
characteristics of the filtering is the same. More specifically, a fibre Bragg grating (FBG) has
a peak in the reflectance at its central frequency, while a Fabry-Pérotfilter (FP) has a peak in
the transmittance at its central frequency; see figure 1.2. There are someimportant practical
differences between the two setups in figure 1.1 that are discussed in moredetail in section 1.1.
Nevertheless, the 2FOF laser in either form can be modelled by rate equations for the complex-
valued electric fieldE inside the laser, for the real-valued population inversionN inside the
laser, and for the complex-valued electric fieldsF1 andF2 inside the two filters. The 2FOF
laser is hence described by a delay differential equation (DDE) model, equations (1.1)–(1.4)

1.1. Modelling the 2FOF laser 5
introduced in detail in section 1.1 below, which describes the time evolution of seven real-
valued variables and in the presence of two discrete delay timesτ1 andτ2.
1.1 Modelling the 2FOF laser
The 2FOF design with fibre Bragg gratings (FBG) as in figure 1.1 (a) is the one that has been
employed in industrial pump sources [52], and it is also the one consideredin [21, 59, 60]; see
also the analysis of FOF from a FBG in [50]. The main advantage is that FBGsare simple and
cheap to manufacture in a fiber at desired locations; furthermore, apartfrom the need to couple
the light into the fiber without any direct reflections (to avoid COF), no additional optical
elements are required so that the device is relatively simple; see figure 1.1 (a). The downside is
that, once it is imprinted into an optical fiber, a FBG cannot be modified. Furthermore, the two
filters are not independent feedback loops. When the two FBGs operateat different frequencies
(as in the actual devices) then they are transparent to each other’s central frequency, meaning
that the first FBG only slightly weakens the light reflected from the second FBG and one may
assume that there are no direct interactions between these two filters. However, when both
FBGs operate very close to the same frequency then the feedback from the second FBG is
almost completely blocked, so that the laser receives feedback only fromone filter. Another
issue is that the light reflected from a FBG is due to the interaction with the entire grating, which
means that the round-trip time of the reflected light is not so easy to determine. Furthermore,
the optical fiber and the FBGs are susceptible to mechanical strain and to thermal expansion.
Such perturbations result in a modifications of the filter central frequencyand the feedback
phase via changes of the feedback loop length at a sub-wavelength scale. For these reasons it is
difficult to perform controlled experiments with the FBGs setup over large ranges of parameters
of interest.
The experimental setup in figure 1.1 (b) is less practical in industrial applications, but it
allows for exact and independent control of all relevant system parameters. More specifically,
the FOF comes from two independent unidirectional filter loops that do not influence one an-
other. The two delay times and feedback phases can easily be changed in the experiment as
independent parameters. Furthermore, the system can be investigated for any combination of
filter frequencies and widths (but note that every change of the filter properties requires a dif-
ferent FP filter). Finally, this type of experimental setup with a single FOF loophas been used
successfully in studies of the single FOF laser [18, 19]. In particular, it has been shown that the
system is modelled very well by a rate equation model where the filters are assumed to have a
Lorentzian transmittance profile [28, 74].
In spite of the differences in terms of which parameter ranges can be explored in an exper-
iment, both realisations of the 2FOF laser in figure 1.1 can be modelled by the dimensionless

6 Chapter 1. Introduction
rate equations
dE
dt= (1 + iα)N(t)E(t) + κ1F1(t) + κ2F2(t), (1.1)
TdN
dt= P − N(t) − (1 + 2N(t))|E(t)|2, (1.2)
dF1
dt= Λ1E(t − τ1)e
−iC1p + (i∆1 − Λ1)F1(t), (1.3)
dF2
dt= Λ2E(t − τ2)e
−iC2p + (i∆2 − Λ2)F2(t). (1.4)
The well established assumptions here are that the delay timesτ1 andτ2 are larger than the
light roundtrip time inside the laser and that the filters have a Lorentzian transmittance profile
(figure 1.2); see [22, 28, 74] for more details. More specifically, one obtains Eqs. (1.1)–(1.4)
as an extension of the rate equations model of the single FOF laser [28, Eqs. (1)–(3)] with an
additional equation for the field of the second filter.
Equation (1.1) describes the time evolution of the complex-valued slowly-varying elec-
tric field amplitudeE(t) = Ex(t) + iEy(t) of the laser. Equation (1.2) describes normalised
population inversionN(t) within the laser active medium. In (1.1)–(1.2) the material prop-
erties of the laser are described by the linewidth enhancement factorα (which quantifies the
amplitude-phase coupling or frequency shift under changes in population inversion [32]), the
ratio T between the population inversion and the photon decay rates, and the dimensionless
pump parameterP . Time is measured in units of the inverse photon decay rate of10−11s.
Throughout, we use values of the semiconductor laser parameters from [17] that are given in
table 1.1.
The two FOF loops enter equation (1.1) as feedback termsκ1F1(t) andκ2F2(t) with nor-
malised feedback strengthsκ1 andκ2 [67, p. 93] of the normalised filters fieldsF1(t) and
F2(t). In general, the presence of a filter in the system gives rise to an integralequation for
the filter field. However, in the case of a Lorentzian transmittance profile as assumed here,
derivation of the respective integral equation yields the description of thefilter fields by DDEs
(1.3) and (1.4); see [74] for more details.
The two filter loops are characterised by a number of parameters. As for any coherent
feedback, we have the feedback strengthκi, the delay timeτi and the feedback phaseCip of the
filter field, which is accumulated by the light during its travel through the feedback loop. Hence,
Cip = Ω0τi. Owing to the large difference in time scales between the optical period2π/Ω0 and
the delay timeτi, one generally considersτi andCip as independent parameters. Namely, as has
been justified experimentally [19, 30], changing the length of the feedbackloop on the optical

1.1. Modelling the 2FOF laser 7
Parameter Meaning Value
LaserP pump parameter 3.5α linewidth enhancement factor 5T inversion decay rate / photon decay rate 100
Feedback loopsκ1 first loop feedback strength from 0.01 to 0.05κ2 second loop feedback strength from 0.01 to 0.05τ1 first loop round-trip time 500τ2 second loop round-trip time 500 to 800C1
p first loop feedback phase 2π-periodicC2
p second loop feedback phase 2π-periodic
Filters∆1 first filter central frequency detuning from -0.82 to 0.82∆2 second filter central frequency detuning from -0.82 to 0.82Λ1 first filter spectral width from 0.0 to 0.5Λ2 second filter spectral width from 0.0 to 0.5
Table 1.1. System parameters and their values.
wavelength scale of nanometres changesCip, but effectively does not changeτi. Two different
strategies for changingCip have been used experimentally: in [19] this is achieved by changing
the length of the feedback loop on the optical wavelength scale with a piezo actuator, and in
[30] Cp is varied indirectly through very small changes in the pump current which, inturn,
affectΩ0.
The optical properties of the filters are given by the detunings∆i of their central frequencies
from the solitary laser frequency, and by their spectral widthsΛi, defined as the frequency
width at half-maximum (FWHM) of the (Lorentzian) transmittance profile. In thisstudy we
consider the filter detunings∆1 and∆2 as independent parameters. Furthermore, we keep both
feedback strengths as well as both filter widths equal, so that throughoutwe useκ := κ1 = κ2
andΛ := Λ1 = Λ2. The values of the feedback parameters are also given in table 1.1.
We remark that system (1.1)–(1.4) contains as limiting cases two alternative setups that
have also been considered for the stabilisation of the laser output. First, when the spectral
width of only one filter is very large then the laser effectively receives feedback from an FOF
loop and from a COF loop; see, for example, [3, 13]. Second, when thespectral widths of
both filters are very large then one is dealing with a laser with two external COFloops; see, for
example, [55, 63] and the discussion in section 2.4.2.
System (1.1)–(1.4) shares symmetry properties with many other systems with coherent
optical feedback. Namely, the system has anS1-symmetry [29, 34, 40] given by simultaneous

8 Chapter 1. Introduction
rotation over any fixed angle ofE and both filter fieldsF1 andF2. This symmetry can be
expressed by the transformation
(E, N, F1, F2) 7→(Eeiβ , N, F1e
iβ , F2eiβ)
(1.5)
for any0 ≤ β ≤ 2π. In other words, solutions (trajectories) of (1.1)–(1.4) are not isolatedbut
come inS1-families. In particular, the EFMs introduced in the next chapter are grouporbits
under this symmetry, and this fact leads to an additional zero eigenvalue [17, 34], which needs
to be considered for stability analysis. Furthermore, the continuation of EFMs with DDE-
BIFTOOL requires isolated solutions, which can be obtained as follows. After substitution of(Eeibt, N, F1e
ibt, F2eibt)
into (1.1)–(1.4) and dividing through by an exponential factor, the
reference frequencyb becomes an additional free parameter. A suitable choice ofb ensures that
one is considering and computing an isolated solution; see [29, 56] and Appendix A for details.
There is also a rather trivial symmetry property: the feedback phasesCip are2π-periodic
parameters, which means that they are invariant under the translation
Cip 7→ Ci
p + 2π. (1.6)
This property is quite handy, because results can be presented either over a compact fundamen-
tal interval of width2π or on the covering spaceR of Cip; see also [17].
1.2 Outline of the thesis
This thesis is organised in the following way. In chapter 2 we discuss the structure of the
continuous-wave solutions — called the EFMs — of the rate equation model (1.1)–(1.4). We
first introduce in section 2.1 the EFMs and show how they can be uniquely determined by
their frequencies, which are given by solutions of a transcendental equation; furthermore we
show that the envelope of the transcendental equation for the frequencies of the EFMs is key to
understanding the structure of the EFMs. In section 2.1.1 we show the correspondence between
the EFM components of the 2FOF laser and the EFM components known for thesingle FOF
laser. In section 2.2 we introduce the EFM surface, the key object of ourstudies. The EFM
surface provides a geometric approach to the multi-parameter analysis of the2FOF laser. In
this way, it allows for comprehensive insight into the dependence of the EFMs on the feedback
phases of both feedback loops. Moreover, we show that the EFM surface of the 2FOF laser is
a natural generalisation of the EFM component of the single FOF laser.
To study the dependence of the EFM surface on filter and feedback loopparameters in
section 2.3, we introduce a classification of the EFM surface into differenttypes. For clarity
of exposition we successively increase the number of parameters involved in our analysis. We

1.2. Outline of the thesis 9
start by considering, in section 2.3.1, how the EFM components depend on the filter detunings
and filter widths. Next, in sections 2.3.2–2.4 we perform a comprehensive analysis for the
EFM surface. In particular, in section 2.3.2 we introduce the different types of the EFM sur-
face. Next, we show that transitions between different types of the EFM surface correspond to
five codimension-one singularity transitions: through extrema and saddle points, and through
a cubic tangency. We present details of these five singularity transitions in section 2.3.3. Fur-
thermore, in section 2.3.4 we use the loci of the transitions to construct the bifurcation diagram
of the EFM surface in the plane of detunings of the two filters. Finally, in section 2.4 we show
how the EFM surface bifurcation diagram in the plane of filter frequency detunings changes
with the filter widths. We finish our analysis of the dependence of the EFM surface on filter and
feedback loops parameters in section 2.5, where we show that a non-zero difference between
the two delay times has the effect of shearing the EFM surface.
In chapter 3 we present a stability analysis of the EFMs. We start by considering how the
stability of EFMs changes with the common filter and feedback loop parameters and then anal-
yse effects of changing the filter detunings and delay times. In section 3.1 weshow that regions
of stable EFMs are bounded by saddle-node and Hopf bifurcations; moreover, we study how
these stable EFM regions change with the increasing feedback strength. Next, in section 3.2 we
present how the regions of stable EFMs are affected by changing the filter widths. Both these
sections show that, although topologically the EFM surface remains unchanged, the stability of
EFMs changes substantially. In section 3.3 we show in what way the regionsof stable EFMs
are influenced by the singularity transitions of the EFM surface (discussed in section 2.3.3) that
occur as the modulus of detunings of the two filters is increased. The last parameters that we
analyse in section 3.4 in terms of the effect on EFM stability are again the delay times: the
main effect is shearing of the EFM stability regions on the EFM surface. Finally, in section 3.5
we briefly describe what kinds of periodic solutions originate from the Hopf bifurcations that
bound regions of stable EFMs.
An overall summary of the thesis can be found in chapter 4, where we also discuss the
possibility of an experimental confirmation of our findings. Finally, AppendixA gives more
details of how the EFM surface has been rendered from data obtained viacontinuation runs
with the package DDE-BIFTOOL.


Chapter 2
Classification of EFM structure
In this chapter we perform an extensive study of the external filtered modes (EFMs) of the
2FOF laser as modelled by the DDE model (1.1)–(1.4). The analysis shows that the second
filter influences the structure of the EFMs of the laser significantly. As was already mentioned,
in the single FOF laser one may find two (disjoint) EFM components. However, in the 2FOF
system, the number of (disjoint) EFM components depends on the exact phase relationship
between the two filters. When the filter loops have the same delay times, the interference
between the filter fields can give rise to at most three EFM components — one around the
solitary laser frequency and one around the central frequencies of the two filters. However,
when the two delay times are not the same, then the interference between the filter fields may
lead to any number of EFM components.
The EFM structure with dependence on the different system parameters isquite compli-
cated and high-dimensional. To deal with this difficulty we present our results in the form
of EFM surfaces in suitable three-dimensional projection spaces. Thesesurfaces are rendered
from EFM curves in several two-dimensional sections, which are computed with the continu-
ation software DDE-BIFTOOL [11] as steady-state solutions of the DDE model; see the Ap-
pendix for more details. We first present the EFM surface for the case of two identical filter
loops, but with nonzero phase difference between the filters. The properties of the EFM com-
ponents for this special case can be explained by considering slices of the EFM surface for
different values of the filter phase difference. We then consider the influence of other param-
eters on the EFM surface. First, we study the influence of the two filter detunings∆1 and∆2
(from the solitary laser frequencyΩ0) on the number of EFM components (for a representative
value of the spectral width of the filters), which provides a connection with and generalisation
of the single FOF case. The result is a bifurcation diagram in the(∆1, ∆2)-plane whose open
regions correspond to different types of the EFM surface. In the spirit of singularity theory,
we present a classification of the EFM surface where the rationale is to distinguish cases with
different numbers of corresponding EFM components. The boundarycurves in the(∆1, ∆2)-
plane correspond to singularity transitions (for example, through saddle points and extrema)
11

12 Chapter 2. Classification of EFM structure
of the EFM surface, and they can be computed as such. In a next step wealso show how the
bifurcation diagram in the(∆1, ∆2)-plane changes with the spectral width of the filters. This
chapter shows how the 2FOF filter transitions between the two extreme cases of an infinitesi-
mally narrow filter profile, which corresponds to optical injection at a fixed frequency, to that
of an infinitely wide filter profile, which is physically the case of conventional(i.e. unfiltered)
optical feedback. In the final part of the chapter we consider the EFM surface for different
delay times of the filter loops, which yields the geometric result that there may be an arbitrary
number of EFM components.
The EFM surface is the natural object that one should consider to understand dynami-
cal properties of the 2FOF laser. Our analysis reveals a complicated dependence of the EFM
surface on several key parameters and provides a comprehensive and compact way of under-
standing the structure of the EFM solutions.
2.1 External filtered modes
The basic solutions of the 2FOF laser correspond to constant-intensity monochromatic laser
operation with frequencyωs (relative to the solitary laser frequencyΩ0). These solutions are
the external filtered modes. Mathematically, an EFM is a group orbit of (1.1)–(1.4) under the
S1-symmetry (1.5), which means that it takes the form
(E(t), N(t), F1(t), F2(t)) =(Ese
iωst, Ns, F1s ei(ωst+φ1), F 2
s ei(ωst+φ2))
. (2.1)
Here,Es, F 1s andF 2
s are fixed real values of the amplitudes of the laser and filter fields,Ns
is a fixed level of inversion,ωs is a fixed lasing frequency, andφ1, φ2 are fixed phase shifts
between the laser field and the two filter fields. To find the EFMs, we substitute the ansatz (2.1)
into (1.1)–(1.4); separating real and imaginary parts [28, 29] then gives the equation
Ω(ωs) − ωs = 0 (2.2)
where
Ω(ωs) = −√
1 + α2
κ1Λ1 sin
(φ1 + tan−1(α)
)√
Λ12 + (ωs − ∆1)
2+
κ2Λ2 sin(φ2 + tan−1(α)
)√
Λ22 + (ωs − ∆2)
2
, (2.3)
and
φi = ωsτi + Cip + tan−1
(ωs − ∆i
Λi
). (2.4)
Equation (2.2) is a transcendental and implicit equation that allows one to determine all pos-
sible frequenciesωs of the EFMs for a given set of filter parameters. More specifically, the

2.1. External filtered modes 13
−0.2 −0.1 0 0.05 0.1−0.3
0
0.3
Ω(ωs)
ωs.
.
Figure 2.1. The graph of (2.3) (black curve) oscillates between its envelope (grey curve) given by
(2.9). Frequencies of EFMs (blue dots) are found from intersection points of the graph ofΩ(ωs) with
the diagonal; also shown are the intersection points (blackdots) with the envelope. HereC1
p = 0,
C2
p = π/3, ∆1 = −0.1, ∆2 = 0.05, κ1 = 0.05, κ2 = 0.025, Λ1 = Λ2 = 0.005, τ1 = 500 and
τ2 = 400.
sought frequency valuesωs of the 2FOF laser can be determined from (2.2) numerically by
root finding; for example, by Newton’s method in combination with numerical continuation.
The two terms of the sum in the parentheses of (2.3) correspond to the firstand the second
filter, respectively. If one of theκi is set to zero, then (2.2) reduces to the transcendental equa-
tion from [28] for the frequencies of EFMs of the single FOF laser. The advantage of the
formulation of (2.2) is that it has a nice geometric interpretation:Ω(ωs) is a function ofωs that
oscillates between two fixed envelopes. More precisely, whenC1p or C2
p are changed over2π
the graph ofΩ(ωs) sweeps out the area in between the envelopes.
Figure 2.1 shows an example of the solutions of (2.2) as intersection points (blue dots)
between the oscillatory functionΩ(ωs) and the diagonal (the straight line through the origin
with slope 1); see also [74]. Onceωs is known, the corresponding values of the other state

14 Chapter 2. Classification of EFM structure
variables of the EFMs can be found from
Ns = −
κ1Λ1 cos(φ1)√
Λ12 + (ωs − ∆1)
2+
κ2Λ2 cos(φ2)√Λ2
2 + (ωs − ∆2)2
, (2.5)
Es =
√P − Ns
1 + 2Ns, (2.6)
F 1s =
EsΛ1√Λ1
2 + (ωs − ∆1)2, (2.7)
F 2s =
EsΛ2√Λ2
2 + (ωs − ∆2)2. (2.8)
This means that an EFM is, in fact, uniquely determined by its value ofωs. Furthermore, it is
useful to consider the envelope ofΩ(ωs) (grey curves) so that Figure 2.1 represents all the rele-
vant geometric information needed to determine and classify EFMs. Notice thatin this specific
example the EFMs are separated into three groups. The diagonal intersects the region bounded
by the envelope in three disjoint intervals where frequenciesωs of EFMs may lie; these in-
tervals correspond to three different EFM components as is discussed insection 2.1.1. As
figure 2.1 suggests, EFMs are created and lost in saddle-node bifurcations when an extremum
of the (black) graph passes through one of the boundary points (blackdots) as a parameter (for
example,C1p ) is changed.
This geometric picture is very similar to that for the single FOF laser [28], but there is
an important difference. The envelope ofΩ(ωs) for the FOF laser is found by considering
the extrema of the sine function (in (2.3) for, say,κ2 = 0). It turns out that the envelope
for the single FOF laser is described by a polynomial of degree four, whose roots are the
boundary points of at most two intervals (or components) with possible EFMs[28]. However,
for the 2FOF laser, considering the extrema of the two sine functions in (2.3)is not sufficient
since they appear in a sum. Hence, we also need to consider mixed terms resulting from the
summation; with the use of standard trigonometric formulae, the equation for the envelope can

2.1. External filtered modes 15
be found as
Ωe(ωs) = ±√
1 + α2
[κ2
1Λ21
Λ21 + (ωs − ∆1)
2 +κ2
2Λ22
Λ22 + (ωs − ∆2)
2 +
2κ1κ2Λ1Λ2 cos(C2
p − C1p + ωs (τ2 − τ1) + tan−1
(ωs−∆2
Λ2
)− tan−1
(ωs−∆1
Λ1
))
√Λ2
1 + (ωs − ∆1)2√
Λ22 + (ωs − ∆2)
2
]1/2
.
(2.9)
Indeed, when one of theκi is set to zero then (2.9) reduces to the fourth-order polynomial
describing the envelope of the single FOF laser in [28]. However, for general values of the
parameters, (2.9) is a transcendental equation, and not a polynomial of degree six as one might
have hoped; nevertheless, by means of (2.9) the envelopeΩe(ωs) can be plotted readily.
The transcendental nature of (2.9) means that the study of the EFM structure of the 2FOF
laser is a considerable challenge. As is shown here, the key is to find a suitable geometric
viewpoint that allows one to understand the dependence of the EFMs on thedifferent filter
loop parameters. A first observation is that (2.9) depends on the differences
dCp := C2p − C1
p and dτ := τ2 − τ1,
which we will hence consider as parameters in what follows; note thatdCp is 2π-periodic as
well.
2.1.1 EFM components
It is well-known for the single FOF laser that its EFMs lie on closed curves in the (ωs, Ns)-
plane. These curves are called EFM-components, and they arise as the set of all EFMs found
for different values of feedback phaseCp, whilst the other parameters of the system are fixed.
More specifically, whenCp is changed, EFMs are born in saddle-node bifurcations, then move
over the respective EFM components in the direction of increasingωs, and finally disappear
again in saddle-node bifurcations. From an experimental point of view, EFM components
are quite natural objects that can be measured as groups of EFMs whosefrequencies vary
with the feedback phaseCp; see [19]. For the single FOF laser one finds either one or two
EFM components, depending on the properties of the filter. Intuitively, oneexpects one EFM
component centred around the solitary laser frequency and, if the detuning ∆ is large enough,
a second EFM component around the filter central frequency. As was already mentioned, the
exact dependence on the filter properties can be studied for the single FOF laser by considering
the roots of a polynomial of degree four that arises from the equation forthe envelope of the
EFMs; see [28] for details.

16 Chapter 2. Classification of EFM structure
For the 2FOF laser the situation is more complicated. Intuitively, one may think thatnow
up to three EFM components may occur in the(ωs, Ns)-plane: one centred around the solitary
laser frequency and two more around the central frequencies of the twofilters. However, this
intuition is not correct, and we will show that one may in fact have any numberof EFM com-
ponents. Physically, the reason for this vastly more complicated EFM structure of the 2FOF
laser is the interference between the two filter fields, which can be interpreted as giving rise to a
complicated ‘effective’ filter profile. Mathematically, the reason behind the more complicated
EFM structure lies in the transcendental nature of the envelope equation (2.9).
In spite of these underlying difficulties, we now proceed with providing a geometrical rep-
resentation of the EFM structure of the 2FOF laser in dependence on system parameters. Since
the transcendental EFM equation (2.2) is complicated and depends on all system parameters,
its solutions can only be found numerically (except for certain very special choices of the pa-
rameters). From the value of the EFM frequencyωs one can compute the values of the other
EFM quantitiesEs, Ns, F 1s , F 2
s , φ1 andφ2. In particular, the inversionNs can be expressed as
a function ofωs as
N2s + (ωs − αNS)2 =
κ21Λ
21
Λ12 + (ωs − ∆1)
2 +κ2
2Λ22
Λ22 + (ωs − ∆2)
2 +
2κ1κ2Λ1Λ2 cos(dCp + ωs dτ + tan−1
(ωs−∆2
Λ2
)− tan−1
(ωs−∆1
Λ1
))
√Λ1
2 + (ωs − ∆1)2√
Λ22 + (ωs − ∆2)
2.
(2.10)
From this quadratic expression we can conclude that for anyωs there are either no, one or two
solutions forNs. In particular, any EFM component is a smooth closed curve that consists
of two branches, one with a higher and one with a lower value ofNs, which connect at two
points where (2.10) has exactly one solution. EFM components in the(ωs, Ns)-plane can be
computed from the implicit transcendental equations (2.2) and (2.10) by root solving, ideally
in combination with numerical continuation. An alternative approach is to find andthen con-
tinue in parameters EFMs directly as steady-state solutions of the governing system (1.1)–(1.4)
of delay differential equations; this can be achieved with the numerical continuation package
DDE-BIFTOOL [11]. Additionaly, by using DDE-BIFTOOL we can obtain stability informa-
tion on the EFMs.

2.1. External filtered modes 17
2.1.2 EFM components for two identical filters
The starting point of our study of the EFM structure is the special case thatthe two filters are
identical, apart from having differing feedback phasesC1p andC2
p . Hence, we now set
κ := κ1 = κ2, ∆1 = ∆2, Λ := Λ1 = Λ2, τ1 = τ2.
The EFMs for this special case are given by the EFMs of a corresponding single FOF laser
with effective feedback strength
κeff = 2κ cos
(dCp
2
)(2.11)
and effective feedback phase
Ceffp =
(C1
p + C2p
)/2.
In other words, we obtain a non-trivial reduction of the 2FOF laser to the FOF laser, where the
feedback phase differencedCp arises as a natural parameter that controls the effective feedback
strengthκeff as a result of interference between the two filter fields. One extreme case isthat
of constructive interference whendCp = 0 so thatκeff = 2κ. The other extreme is the case of
destructive interference whendCp = π andκeff = 0. Hence, by changingdCp we can ‘switch
on’ or ‘switch off’ the overall filter field that the laser sees.
Clearly, which EFMs one finds depends on both feedback phasesC1p andC2
p . Branches
of EFMs are obtained by specifying a single condition onC1p andC2
p , while keeping all other
parameters fixed. The easiest option is to continue EFM curves in, say,C1p while keepingC2
p
constant. Another option is to require that the frequencyωs remains fixed. Note that for the
above choices the feedback phase differencedCp changes along the branch of EFMs.
We now consider EFM components of the 2FOF, which we define as the branches of EFMs
that one finds when the feedback phases,C1p or C2
p are changed while the feedback phase
differencedCp is fixed. This definition is the appropriate generalisation from the single FOF
laser [28]. The underlying idea is that the value ofdCp determines the interference of the light
from the two filtered feedback loops and, hence, an important property of the overall feedback
the laser sees. In the simplest case of two identical feedback loops fixingdCp results in the
fixed effective feedback strengthκeff . However, as we will see, our notion of EFM components
for the 2FOF laser is equally natural for nonidentical filter loops.
Figure 2.2 shows a projection of different branches of EFMs onto the(ωs, Ns)-plane and
onto the(ωs, C1p)-plane, respectively. Here we fixedκ = κ1 = κ2 = 0.05, Λ := Λ1 =
Λ2 = 0.015, τ1 = τ2 = 500, and consider the case where both filters are resonant with the

18 Chapter 2. Classification of EFM structure
−0.1 0 0.1−0.02
0
0.02
−0.1 0 0.1−5
0
5(a)
ωs
Ns
(b)
ωs
C1
p
π
.
.
Figure 2.2. Projection of EFMs branches onto the(ωs, Ns)-plane (a) and onto the(ωs, C1
p)-plane (b).
The open circles are the starting points for three differenttypes of branches. The blue branch is the EFM
component fordCp = 0, the green branches are for constantC1
p , and the red branches are for constant
ωs. Here∆1 = ∆2 = 0, κ1 = κ2 = 0.05, Λ1 = Λ2 = 0.015, dτ1 = τ2 = 500 and the other parameters
are as given in Table 1.1.
solitary laser, meaning that∆1 = ∆2 = 0; the other parameters are as given in Table 1.1.
Colour in figure 2.2 distinguishes three types of one-dimensional EFM branches; the three sets
of blue, green and red curves are all clearly visible projection onto the(ωs, Ns)-plane in panel
(a). The continuations were started from the set of EFMs (open circles)that one finds on the
EFM component fordCp = 0 if one insists that one of the EFMs (the top open circle) has a
frequency ofωs = 0.
The outer blue curve in figure 2.2 (a) is a single EFM-component that connects all EFMs; it
is indeed exactly the EFM component of the single FOF laser with a feedback strength ofκeff =
2κ; see [28]. WhenC1p is increased by2π, while keepingdCp = 0, each EFM moves along
the blue EFM component to the position of its left neighbour. Hence, the EFM-component
can be calculated either by the continuation of all EFMs over theC1p -range of[0, 2π], or by the
continuation of a single EFM over several multiples of2π. The green curves are the branches of
EFMs that one obtains by changingC2p while keepingC1
p constant. Notice that green branches
connect an EFM at the top with one at the bottom of the blue EFM-component; theexception
is the branch near the origin of the(ωs, Ns)-plane, which connects three EFMs. WhenC2p
is increased by2π the respective EFMs on the green branch exchange their positions in a
clockwise direction. Finally, the red branches in figure 2.2 (a) are the result of continuation of
EFM solutions for (1.1)–(1.4) inC1p andC2
p while ωs is kept constant; hence, these branches
appear as straight vertical lines that start at the respective EFM. Figure 2.2 (b) shows the exact
same branches but now in projection onto the(ωs, C1p)-plane. In this projection, the blue EFM
branch ‘unwraps’ as a single curve that oscillated inC1p ; this property is characteristic and can
be found, more generally, for lasers with delayed feedback or coupling[28, 34, 61]. In the
(ωs, C1p)-plane the red and the green branches are perpendicular to each other. Furthermore,
the image is invariant under a 2π translation along theC1p -axis.

2.2. The EFM-surface 19
2.2 The EFM-surface
The discussion in the previous section shows that the dependence of the EFMs on the feedback
phasesC1p andC2
p (when all other parameters are fixed) gives rise to different one-parameter
families of EFM branches, depending on the conditions one poses. In other words, one is
really dealing with a surface of EFMs in dependence on the two feedback phases, which is
represented by any of the three families of EFM branches we discussed.Motivated by the
question of how many EFM components there are for the 2FOF laser, and in line with the
well-accepted representation of the external cavity mode structure for other laser systems with
delay [34, 61], it is a natural choice to represent this surface by the EFM values ofωs andNs
in combination with one additional parameter.
A first and quite natural choice is to consider the EFM surface in the(ωs, Ns, C1p)-space.
This representation stresses the influence of an individual feedback phase, hereC1p , which is
convenient to make the connection with previous studies in [17, 35]. Figure2.3 shows the EFM
surface for the case of two identical filters in this way. Panel (a) shows agrey semitransparent
two-dimensional object with EFMs branches from figure 2.2 superimposed. This object is the
‘basic’ element of the entire EFM surface, which consists of all infinitely many 2nπ-translated
copies of this basic element. Note that the2nπ-translated copies connect smoothly at the open
ends of the surface element shown in panel (a). The element of the EFM surface was rendered
from computed one-dimensional EFM branches for fixedωs; selection of these branches is
shown as the red curves in figure 2.3 (a). Almost all red EFM branches are closed loops that
connect two points, each on the blue branch. An exception is the central red EFM branch
for ωs = 0, which connects infinitely many points on the infinitely long blue branch. Hence,
this red branch is important for representing the EFM surface properly;it is defined by the
conditions that both sine functions in (2.3) vanish, which means that
C1p = π + tan−1
(∆1
Λ1
)+ tan−1 (α) , (2.12)
C2p = π + tan−1
(∆2
Λ2
)+ tan−1 (α) . (2.13)
The starting points for the calculations of the red EFM branches are taken from the maximal
blue curve, which corresponds to the maximal EFM component fordCp = 0; compare with
figure 2.2 (b). It forms the helix-like curve in(ωs, Ns, C1p)-space that is shown in figure 2.3 (a)
over one2π interval ofC1p . What is more, the shown part of the EFM surface is a fundamental
unit under the translational symmetry ofC1p that contains all the information. This means that
the entire EFM surface is obtained as a single smooth surface from all of the2nπ-translated
copies of the unit in figure 2.3 (a). Notice that the shown part of the EFM surface is tilted in the
C1p direction. More specifically, for negativeωs the red EFM branches are shifted toward higher

20 Chapter 2. Classification of EFM structure
(a)
Ns
C1
p/π
ωs
−0.02
0
0.02
15
0
−15−0.1
0
0.1
(b)
Ns
C1
p/π
ωs
0
0
(c)
Ns
C1
p/π
ωs
0
0
.
.
Figure 2.3. Representation of the EFM surface in(ωs, Ns, C1
p)-space; compare with figure 2.2. Panel
(a) shows one fundamental element of the EFM surface (semitransparent grey); superimposed are the
EFM branches from figure 2.2. The entire EFM surface is a single smooth surface that is obtain by
connecting all2nπ-translated copies of the surface element shown in panel (a). Panels (b) and (c) show
how the EFM branches for constantC1
p and for constantωs, respectively, arise as intersection curves of
fixed sections with the EFM surface.
values ofC1p , whereas for positiveωs they are shifted toward lower values ofC1
p ; compare
with the projection onto the(ωs, C1p)-plane in figure 2.2 (b). Notice that for the maximal and
minimal possible values ofωs, the red EFM branches contract to just single points on the blue
EFMs branch.
The representation of the EFM surface in(ωs, Ns, C1p)-space in figure 2.3 is, in effect, the
three-dimensional analogue of the representation of the EFM branches inthe (ωs, C1p)-plane
in figure 2.2 (b). In particular, the two sets of EFM branches for fixedC1p and fixedωs (green

2.2. The EFM-surface 21
and red curves) arise naturally as intersection curves with planar sections. This is illustrated in
figure 2.3 (b) and (c). Panel (b) shows a cutaway through a four2nπ-translated copies of the
fundamental unit of the EFM surface, and illustrates the single red EFM branch forωs = 0, as
well as2nπ-translated copies of closed red EFM branches forωs = −0.06. Panel (c) shows
with a different cutaway image of the EFM surface how the green EFM branches for fixedC1p
arise as disjoint intersection curves with a fixed planar section; shown areall the green EFMs
branches from figure 2.2 (a) that also appear on the EFM surface in figure 2.3 (a). Note, that
the two sections in figure 2.3 (b) and (c) are perpendicular to each other.
While the representation of the EFM surface in(ωs, Ns, C1p)-space is quite natural, it
has the disadvantage that an EFM component actually corresponds to a non-closed curve that
runs in theC1p direction over the EFM surface in(ωs, Ns, C1
p)-space. To be able to study the
EFM components more directly, we now consider the ‘compactified’ representation of the EFM
surface in(ωs, Ns, dCp)-space; in other words, in this space, the EFM surface is considered as
the one-parameter family (parametrised bydCp) of actual EFM components themselves, which
arise naturally as closed curves in the(ωs, Ns)-plane by intersection with planar sections given
by dCp = const.
This representation of the EFM surface is used in figure 2.4 for the case of two identical
filters. Shown is one compact fundamental part of the EFM-surface in the(ωs, Ns, dCp)-space
for dCp ∈ [−π, π], with superimposed red, green and blue EFMs branches from figure 2.2.
The entire EFM surface consists of all2nπ-translated copies of this compact surface, which
touch at the points(ωs, Ns, dCp) = (0, 0, (2n + 1)π) wheren ∈ Z. This is shown in panel
(b) in projection onto the(ωs, dCp)-plane fordCp ∈ [−3π, 3π], where the EFM-surface is
represented by grey shading and the coloured curves are the EFMs branches as before. Note
that the green EFM branches are no longer perpendicular to the red EFMs branches. Notice
further that the EFM surface is not tilted with respect to thedCp-axis. The common points for
dCp = (2n + 1)π correspond physically to the situation when both filter fields cancel each
other due to destructive interference, so that the the only EFM of the (1.1)–(1.4) is the solitary
laser solution. Three EFM branches pass through these points: the green branch that connects
three EFMs in figure 2.2 (a) and two red EFMs branches given by
Ns(dCp, ωs = 0) = ±2κ cos
(dCp
2
)cos(ΨdCp
), (2.14)
where
ΨdCp= π + tan−1
(∆
Λ
)− tan−1 (α) . (2.15)
Figure 2.4 (c) illustrates with a cutaway view how the red EFM branches for fixedωs arise; the
section forωs = 0 shows the two cosines from (2.14). Note that the red curves are perpen-
dicular to the blue EFM components; the maximal blue EFM component appears asthe largest

22 Chapter 2. Classification of EFM structure
(b)
-0.1 0 ωs 0.1-3
0
dCp
π
3(c)
ωs
Ns
dCp/π
0
0
(a)0.02
Ns
0
-0.02-0.1
ωs 00.1-1
dCp/π
0
1
.
.
Figure 2.4. Representation of the EFM surface of figure 2.3 in(ωs, Ns, dCp)-space. Panel (a) shows
one fundamental2π interval of the EFM surface (semitransparent grey); superimposed are the EFM
branches from figure 2.2. The entire EFM surface consists of all 2nπ-translated copies of this compact
surface, which touch at the points(ωs, Ns, dCp) = (0, 0, (2n+1)π); panel (b) shows this in projection
of the surface onto the(ωs, dCp)-plane. Panel (c) illustrates how the EFM branches for constantωs and
the outer-most EFM component fordCp = 2nπ arise as intersection curves with planar sections.
closed curve for fixeddCp = 2nπ.
Figure 2.5 shows in more detail how the EFM-component depends ondCp. In practice,
an EFM component for a givendCp = const is computed by continuation of an EFM in the
parametersC1p and ωs, while settingC2
p = C1p + dCp. Panel (a) shows the EFM surface
for dCp ∈ [−π, π] intersected with the two planes given bydCp = 0 and dCp = 0.9π,
respectively. The corresponding EFM components arise from the shape of the envelope given

2.2. The EFM-surface 23
−0.1 0 0.1−0.02
0
0.02
−0.1 0 0.1−0.02
0
0.02
−0.1 0 0.1
−0.5
0
0.5
−0.1 0 0.1
−0.5
0
0.5
(a)0.02
Ns
0
-0.02-1
dCp
π 0
0.9-0.1
0ωs
0.1
(b1)
(b2)
(c1)
(c2)
ωs
ωs
ωs
ωs
Ω(ωs) Ω(ωs)
Ns Ns
.
.
Figure 2.5. EFM-components arising as sections through the EFM surfaceof figure 2.4. Panel (a)
shows the EFM-surface in(ωs, Ns, dCp)-space, intersected with the planes defined bydCp = 0 and
dCp = 0.9π, respectively. Panels (b1) and (c1) show the correspondingenvelope (grey curves) given by
(2.9). The black solution curve of (2.3) inside it is forC1
p = 0; it gives rise to the marked blue EFMs.
Panels (b2) and (c2) show the two respective EFM-componentsand individual EFMs (blue dots) in the
(ωs, dCp)-plane.
by (2.9); it is shown in panels (b1) and (c1) together with the solution curveof (2.3) one obtains
when conditions (2.14) and (2.15) are satisfied. The EFM components themselves, with these
EFMs on them, are shown in panels (b2) and (c2). Figure 2.5 illustrates thatchangingdCp

24 Chapter 2. Classification of EFM structure
results in a change in the EFM component, as well as the number of EFMs. Forthe shown case
of two identical filters with equal delay times we can say more: here the changeof the EFM
component is entirely due to the effective feedback rateκeff as described by (2.11). In other
words, the EFM surface is composed of the EFM components of the corresponding single FOF
laser withκeff as determined bydCp. The EFM component is maximal for the constructive-
interference casedCp = 0, and it shrinks whendCp is changed. This also means that fewer
EFMs exist; compare figure 2.5 (b1) and (c1). Finally, as the case of entirely destructive
interference fordCp = π is approached, the EFM component shrinks down to a point, which
is the degenerate EFM corresponding to the unique solitary laser mode.
We conclude from this section that the EFM surface in(ωs, Ns, dCp)-space has emerged
as the main object of study. It represents the EFM structure of the 2FOF laser in a convenient
geometric way; in particular, EFM components can easily be obtained as planar slices for fixed
dCp.
2.3 Classification of the EFM surface fordτ = 0
So far we have only considered the special case that the two filters are identical and not detuned
from the laser; furthermore, the two delay times are equal. We now addressthe question how
the EFM surface changes as the system is moved away from this special point in the space of
parameters. In this section we consider the case that the two filter loops havethe same delay
time, that is,dτ = 0. The influence of a difference in delay times is the subject of section 2.5.
We start by considering in section 2.3.1 how the EFM components depend on the detunings
∆1 and∆2 for fixed dCp = 0. We then proceed to study how the EFM surface itself changes
with ∆1 and∆2. This can be represented for a fixed filter widthΛ of both filters by an EFM
surface bifurcation diagram in the(∆1, ∆2)-plane, where each open region corresponds to a
different type of EFM surface. In section 2.3.2 we first consider the case that the EFM sur-
face gives rise to adCp-independent number of EFM components. We then introduce in sec-
tion 2.3.3 five codimension-one singularity transitions — through extrema and saddle points,
and through a cubic tangency (with respect todCp = const) — that change the EFM surface
in terms of how many EFM components it induces when sliced for fixeddCp. These five sin-
gularity transitions induce a division of the(∆1, ∆2)-plane into open regions of different EFM
surface type. We first, discuss EFM surface types that arise due to transitions through extrema
and saddle points, and next EFM surface types that arise due the cubic tangency. Finally, sec-
tion 2.4 shows how the EFM surface bifurcation diagram in the(∆1, ∆2)-plane changes with
the filter widthΛ.
Throughout this section we make use of the fact that the EFM surface canbe represented
by its projection onto the(ωs, dCp)-plane. Here we make use of the fact that, due to (2.10),

2.3. Classification of the EFM surface fordτ = 0 25
this surface consists of two sheets in(ωs, dCp, N)-space over the(ωs, dCp)-plane, except at
the boundary of its projection. The boundary itself is given by (real-valued) solutions of
dCp = ± cos−1
(√Λ2
1 + (ωs − ∆1)2√
Λ22 + (ωs − ∆2)
2
2κ1κ2Λ1Λ2
×(
ω2s
(1 + α2)− κ2
1 Λ21
Λ21 + (ωs − ∆1)
2 − κ22 Λ2
2
Λ22 + (ωs − ∆2)
2
))
− ωs dτ − tan−1
(ωs − ∆2
Λ2
)+ tan−1
(ωs − ∆1
Λ1
).
(2.16)
This equation is derived from (2.9), and it has the advantage that it doesnot depend on any
of the state variables of (1.1)–(1.4). Hence, in contrast to computing the EFM surface itself,
which requires the continuation of EFMs in parameters, its projection onto the(ωs, dCp)-plane
can be computed directly from (2.16). Notice also that the projection in the(ωs, dCp)-plane is
independent of the choice of the additional state variable that one chooses for visualisation of
the EFM-surface.
2.3.1 Dependence of the EFM components for fixeddCp = 0 on the detunings
We now fixeddCp = 0 and consider the detunings∆1 and∆2 as free parameters. We first
consider an intermediate fixed filter widthΛ = Λ1 = Λ2 = 0.015 of both filters; moreover,
τ1 = τ2 = 500 and the other parameters are as given in Table 1.1. In this situation, one
may find one, two or three EFM components in the FOF laser. Because both thetop and the
bottom part of the envelope given by (2.9) intersect the diagonal, the EFMcomponent around
a solitary laser frequencyωs = 0 is always present. In the presence of the two filters, one may
find additional EFM components, which exist around the central frequencies of the filters as
given by∆1 and∆2; note that (2.9) has two obvious extrema forωs = ∆1 andωs = ∆2. Each
additional EFM component comes with its own pair of saddle-node bifurcationpoints, given
geometrically by the condition that an extremum of (2.9) intersects the diagonalωs = Ω(ωs);
see figure 2.1.
Figure 2.6 shows EFM components for nonzero detunings and fixeddCp = 0; more specif-
ically, we fix ∆1 = 0.2 and increase∆2 in (a) to (d). Each case is shown by two panels, one
showing envelope and solution curve, and the other the corresponding EFM-components and
EFMs. One can imagine this situation as a single FOF laser with detuning∆1, which is subject
to the influence of the second filter loop. If the detuning∆2 of the second filter is below or
above a critical value then the influence of the second filter is negligible and one observes only
two EFM-components. However, for intermediate values of∆2 this is no longer the case. For

26 Chapter 2. Classification of EFM structure
−0.2 0 0.2−0.05
0
0.06
−0.2 0 0.2−0.05
0
0.06
−0.2 0 0.2−0.5
0
0.5
−0.2 0 0.2−0.5
0
0.5
−0.2 0 0.2−0.05
0
0.06
−0.2 0 0.2−0.05
0
0.06
−0.2 0 0.2−0.5
0
0.5
−0.2 0 0.2−0.5
0
0.5(a1)
(a2)
(c1)
(c2)
(b1)
(b2)
(d1)
(d2)
ωs
ωs
ωs
ωs
ωs
ωs
ωs
ωs
Ns
Ns
Ns
Ns
T (ωs)
T (ωs)
T (ωs)
T (ωs)
.
.
Figure 2.6. Envelope and solution curve fordCp = 0 (a1)-(d1) and the corresponding EFM-
components and EFMs (blue dots) of the 2FOF laser, were∆1 = 0.2 is fixed and in panels (a)-(d)
∆2 takes the values−0.2, 0, 0.158 and0.2, respectively; hereΛ1 = Λ2 = 0.015, τ1 = τ2 = 500 and
the other parameters are as given in Table 1.1.
∆2 = −0.2 as in figure 2.6 (a1) and (a2), the two detunings have equal magnitude butopposite
signs. Hence, there are three EFM components, the central one nearωs = 0 being quite small.
When∆2 is increased, the left-most EFM component moves towards largerωs and then merges
with the central one; see figure 2.6 (b1) and (b2) for∆2 = 0. As∆1 is increased further so that

2.3. Classification of the EFM surface fordτ = 0 27
it is well in betweenωs = 0 andωs = 0.2, we find again a situation with three EFM compo-
nents; see figure 2.6 (c1) and (c2) for∆2 = 0.158. Finally, for∆1 = ∆2 = 0.2 we again find
only two EFM components; see figure 2.6 (d1) and (d2). Now the amplitudes of envelope and
solution curve are much higher, which is due to maximal constructive interference between the
two filter fields sincedCp = 0.
Note that the filters are quite narrow (Λ1 = Λ2 = 0.015), namely much narrower than the
detuning∆1 = 0.2 between the laser and the first filter. As a result, in figure 2.6 (a), (c) and(d)
the EFM-component around the solitary laser frequency has an elliptical shape, as known from
COF systems [61, 46]. This is the case because flanks of the both filters transmittance profiles
nearsωs = 0 are quite flat, meaning that all frequencies around the solitary laser frequency
are fed back with approximately the same low feedback strength. Therefore, this situation
resembles the effect of weak COF [46]. In figure 2.6 (b) for∆2 = 0, on the other hand, the
EFM-component around the solitary laser frequency has a ‘bulge’ — much as one finds in
figure 2.2 (a) — which is the result of the frequency selective feedbackfrom the second filter.
For a fixed value of the widthΛ = Λ1 = Λ2 of both filters, one obtains a bifurcation
diagram in the(∆1, ∆2)-plane that consists of regions where the 2FOF laser system has one,
two or three EFM-components fordCp = 0. The regions are bounded by curves that can be
computed by means of numerical continuation. Namely, the number of the EFM components
changes when two saddle-node points (black dots in figure 2.1) come together. This happens
when the envelope given byΩe(ωs) from (2.9) is tangent to the diagonal. Hence, the conditions
that are continued in∆1 and∆2 to obtain the boundary curves are,
Ω(ωs) = ωs anddΩe(ωs)
dωs= 1.
Figure 2.7 shows the bifurcation diagram in the(∆1, ∆2)-plane for six different values of
Λ. Open regions are labelled with the number of EFM components that one findsfor dCp = 0
for the respective values of the detunings∆1 and∆2. Notice the two symmetries of the panels
of figure 2.7, given by reflection across the diagonal∆1 = ∆2, and reflection across the
anti-diagonal∆1 = −∆2 (which we already encountered in figure 2.6 (a)). The boundary
curves are coloured orange and grey for presentation purposes only. Figure 2.7 (a) shows
the limiting special case ofΛ = 0, which corresponds to an infinitely narrow filter so that
EFM-components consist of single EFMs. The bifurcation diagram in the(∆1, ∆2)-plane for
this case can be obtained analytically by substituting in Eq. (2.9)ωs = ∆1 andωs = ∆2
respectively. The coordinates of the vertical and horizontal lines in figure 2.7 (a) are given by
κ√
1 + α2 and the end points at the diagonal by2κ√
1 + α2; compare with [28]. Figure 2.7
(b) for Λ = 0.001 shows how the limiting case unfolds forΛ > 0. The black parts of curves in
figure 2.7 (a) open up to reveal new open regions. AsΛ is increased, the bifurcation diagram
deforms, but does initially not change qualitatively; see figure 2.7 (c) forΛ = 0.01, which is

28 Chapter 2. Classification of EFM structure
−0.8 0 0.8−0.8
0
0.8
2
1
22JJQQs
2JJ]QQk
3AAAAU
HHHY
−0.8 0 0.8−0.8
0
0.8
2
1
22JJ
QQQs
2J
JJ]Q
Qk
−0.8 0 0.8−0.8
0
0.8
1 2 1 2 1
2 2 3 2
1 2 1 2 1
2 3 2 2
1 2 1 2 1
2
3
−0.8 0 0.8−0.8
0
0.8
1 1 2 1
1 1 2 12
2 3 2
2 3 2
2
2
1 2 1 1
−0.8 0 0.8−0.8
0
0.8
1 2 2 1
2 3 3 23
32 3 3 2
1 2 2 1
−0.8 0 0.8−0.8
0
0.8
1 2 1 2 1
2 3 2 3 23
1 2 2 13
2 3 2 3 2
1 2 1 2 1
2
2
SS
SSSo
1
∆1
∆1
∆1
∆1
∆1
∆1
∆2
∆2
∆2
∆2
∆2
∆2
(a)
(c)
(e)
(b)
(d)
(f)
.
.
Figure 2.7. Regions in the(∆1, ∆2)-plane with a one, two or three EFM components of the 2FOF laser
for dCp = 0. From (a) to (f)Λ takes the valuesΛ = 0, Λ = 0.001, Λ = 0.01, Λ = 0.06, Λ = 0.12 and
Λ = 0.14.
the case from figure 2.8 (a). However, asΛ is increased further, the bifurcation diagram does
change qualitatively because the different curves move sufficiently relative to one another to

2.3. Classification of the EFM surface fordτ = 0 29
‘disentangle’; see figure 2.7 (d) forΛ = 0.06, where there are now no longer regions with three
EFM components. For larger values ofΛ, the curves cease to extend to infinity and are now
confined to a compact region of the(∆1, ∆2)-plane; as figure 2.7 (e) forΛ = 0.12 illustrates,
this implies that there is now a single large and connected region with one EFM component.
For even larger values ofΛ, there are six non-overlapping curves, each bounding a small region
where one finds two EFM components; see figure 2.7 (f) forΛ = 0.14. WhenΛ is increased
even further, the small regions disappear and one finds a single EFM component for any point
in the(∆1, ∆2)-plane. Physically the filters are now so wide that they do not provide sufficient
differentiation of the feedback light in frequency; hence, the 2FOF laser is effectively a COF
laser.
Figure 2.8 (a) is a three-dimensional bifurcation diagram in(∆1, ∆2, Λ)-space that rep-
resents the entire transition of the bifurcation diagram in the(∆1, ∆2)-plane fordCp = 0 as
the filter widthΛ is changed. Shown are surfaces (coloured orange and grey as in figure 2.7)
that divide this parameter space into regions with one, two or three EFM-components. The bi-
furcation diagrams in figure 2.7 are horizontal cross sections through figure 2.8 (a); the shown
(semitransparent) cross section forΛ = 0.01 yields figure 2.7 (c). Notice that the grey surfaces
in figure 2.8 (a) extend to higher values of∆ than the orange surfaces, which can be explained
as follows. FordCp = 0 the two filter fields interfere constructively, so that for∆1 ≈ ∆2
the amplitude of the solution curve of (2.3) is larger than that around a single filter. Hence,
a second EFM-component around the central frequencies of both filters may exist for higher
values ofΛ, and the maximum of the grey surfaces is exactly at the diagonal where∆1 = ∆2.
Above all surfaces (for sufficiently largeΛ) the 2FOF laser is effectively a COF laser and only
one EFM-component exists.
Figures 2.8 (b) and (c) show that the three-dimensional bifurcation diagram in panel (a)
brings out important special cases where the 2FOF laser reduces to the single FOF laser in a
nontrivial way. Figure 2.8 (b) shows the two-dimensional bifurcation diagram in the(∆1, Λ)-
plane for∆2 = 0.82. Also shown in light grey is the corresponding bifurcation diagram of
the single FOF laser (with detuning∆1) that one obtains for the limit that∆2 = ∞ (when the
second filter does not influence the system any more); compare with [28, Fig. 3(a)]. The close-
ness of the two bifurcation diagrams in figure 2.8 (b) shows that for∆2 ≥ 0.82 the influence
of the second filter is already so small that it does not influence the number of EFM compo-
nents. Figure 2.8 (c) shows the projection onto the(∆1, Λ)-plane of the diagonal section for
∆1 = ∆2 through the surfaces in figure 2.8 (a). Along the diagonal the 2FOF laser reduces
to the single FOF laser with the effective parameters as given by (2.11); in fact, the boundary
curve in figure 2.8 (c) is exactly that from [28, Fig. 3(a)] for the corresponding effective param-
eters, namelyκeff = 2κ1 for dCp = 0. Since this curve scales linearly withκ [28], it is exactly
twice the size as the light grey curve in figure 2.8 (b).

30 Chapter 2. Classification of EFM structure
−0.6 0 0.6 0
0.21
−0.35 0 0.350
0.13
1 2 1 2 1 1 2 1 2 1
∆2 ∆1
Λ
-0.82 -0.82
0.82 0.82
0 0
0
0.21
∆1
Λ Λ
∆1 = ∆2
(a)
(b) (c)
.
.
Figure 2.8. Panel (a) shows surfaces (orange and grey) that divide the(∆1, ∆2, Λ)-space into regions
with one, two and three EFM-components of the 2FOF laser fordCp = 0; in the shown (semitranspar-
ent) horizontal cross section forΛ = 0.01 one finds the bifurcation diagram from figure 2.7 (c) . Panel
(b) shows the bifurcation diagram in the(∆1, Λ)-plane for fixed∆2 = 0.82; the light grey curve is the
boundary curve for the limiting single FOF laser for∆2 = ∞. Panel (c) shows the projection onto the
(∆1, Λ)-plane of the section along the diagonal∆1 = ∆2 through the surfaces in panel (a).
2.3.2 EFM surface types withdCp-independent number of EFM components
We now turn to the question of how the EFM surface itself changes with∆1 and∆2, where
we first consider the case that the EFM surface is such that the associated number of EFM
components is independent ofdCp.
Figure 2.9 shows two examples of EFM surfaces in(ωs, dCp, Ns)-space for the special
case that∆1 = −∆2. Panel (a) shows three copies of the fundamental unit of the EFM surface

2.3. Classification of the EFM surface fordτ = 0 31
−0.1
0
0.1
−3
0
3−0.02
0
0.02
−0.2
0
0.2
−4
0
4−0.04
0
0.04(a) (b)
ωs ωs
dCp
πdCp
π
Ns Ns
.
.
Figure 2.9. The EFM surface in(ωs, dCp, Ns)-space showing caseB for ∆1 = ∆2 = 0 (a), and
showing caseBBB for ∆1 = 0.16, ∆2 = −0.16 (b), whereΛ = 0.015.
for ∆1 = ∆2 = 0. The EFM surface is connected atdCp = π and its integer multiples;
hence, it is a single connected component that extends over any2π interval of dCp, and one
finds a single EFM component for anydCp; compare with figure 2.4 (a) and (b). Figure 2.9 (b)
is for sufficiently large (opposite) detunings when the EFM surface consists of three disjoint
connected components that extend over any2π interval ofdCp. Hence, for anydCp one finds
three EFM components, one around the solitary laser frequencyωs = 0 and the other two
around the central frequenciesωs = ∆1,2 of the filters; compare with figure 2.6 (a). Notice
that, since∆1 = −∆2, the central connected component aroundωs = 0 is also connected at
dCp = π and its integer multiples.
We now turn to the question of where in the(∆1, ∆2)-plane one can find EFM surfaces
that have adCp-independent number of EFM components. To investigate this question, we
consider how the bifurcation diagram in figure 2.7 (c), for the representative value ofΛ =
0.01, with regions of one, two or three EFM components in the(∆1, ∆2)-plane for a fixed
dCp = 0 changes whendCp is varied over the interval[−π, π]. In the process the boundary
curves between regions move in the(∆1, ∆2)-plane and then return to their original positions.
Figure 2.10 shows the resulting curves (again in orange and grey) in the(∆1, ∆2)-plane for
Λ = 0.01, where thedCp-interval [−π, π] is covered in 60 equidistant steps. As a function
of dCp the curves now cover overlapping (orange and grey) regions in the(∆1, ∆2)-plane,
meaning that in these regions the number of EFM components depends on the value ofdCp.
By contrast, in the open white regions in the(∆1, ∆2)-plane of figure 2.10 the number of
EFM is independent of the value ofdCp. This means that the projection of the EFM surface
consists of either one, two or three bands that extend over the entiredCp-interval [−π, π]. In
total there are four such types (up to symmetry) of EFM surface, and theirrepresentatives in
terms of projections of the EFM surface onto the(ωs, dCp)-plane are shown in figure 2.11;

32 Chapter 2. Classification of EFM structure
BB
BB
BBB
BBB
BB
BB
BBBB
B BB
BBBB
B BB B BB B
B
BBB
BBB
BB
BBB
BBB
BB
BB
∆1
∆2
−0.55
0
0.55
−0.55 0 0.55
.
.
Figure 2.10. Boundary curves (orange or grey) in the(∆1, ∆2)-plane forΛ = 0.01 for 61 equidistant
values ofdCp from the interval[−π, π]; compare with figure 2.7 (c). In the white regions the 2FOF
laser has one, two or three EFM components independently of the value ofdCp, as is indicated by the
labelling with symbolsB andB; representatives of the four types of EFM components can be found in
figure 2.11.
for the respective values of∆1 and∆2 see Table 2.1. Each such band in the projection is
represented in figures 2.10 and 2.11 by the letterB. Furthermore,B denotes the band around
the frequency of the solitary laser,ωs = 0, and is later referred to as the central band. It plays
a special role because it corresponds to a part of the EFM surface that always extends over the
entiredCp-interval [−π, π]; moreover,B can be found for any value of detuningΛ of the two
filters, even in the COF limit of an infinitely wide filter; see the discussion of figure 2.8 (a) in
section 2.3.1.

2.3. Classification of the EFM surface fordτ = 0 33
(a)
B
(b)
BB
(c)
BBB
(d)
BBB
.
.
Figure 2.11. The four simple banded types of EFM-surface of the 2FOF laserin the labelled regions of
figure 2.10, represented by the projection (shaded) onto the(ωs, dCp)-plane; the blue boundary curves
are found directly from (2.16). For notation and the corresponding values of∆1 and∆2 see Table 2.1;
in all panelsωs ∈ [−0.3, 0.3] anddCp ∈ [−π, π].
name Cmin Cmax panel ∆1 ∆2 Λ
B 1 1 figure 2.11 (a) 0.080 -0.270 0.01
BB 2 2 figure 2.11 (b) 0.140 -0.270 0.01
BBB 3 3 figure 2.11 (c) 0.210 0.130 0.01
BBB 3 3 figure 2.11 (d) 0.210 -0.130 0.01
Table 2.1. Notation and parameter values for the types of EFM-surface in figure 2.11. The second and
third column show the minimal numberCmin and the maximal numberCmax of EFM components (for
suitable fixeddCp) of the type; note that in all cases the number of EFM components is independent of
dCp .
The notation we use here is more specific than simply counting the number of EFMcom-
ponents; for example, it distinguishes the caseBBB, where the filters are detuned to both sides
of the laser frequencyωs = 0, from the casesBBB andBBB (which are related by symme-
try), where both filters are detuned on the same side of the laser frequency. Notice also that
type BB differs physically from typeBB in terms of whether the second bandB is towards
higher or lower frequencies with respect to the laser frequency (that is, for negative or positive
ω). Nevertheless, these two types are related to each other mathematically, because they are
each other’s images under the symmetry transformation(∆1, ∆2) 7→ (−∆1, −∆2). Indeed
any type that is not symmetric itself comes as a symmetric pair, and it is sufficient toshow only
one type of such a pair in figure 2.11. Note that the two EFM surfaces in figure 2.9 are of type
B andBBB, respectively.
2.3.3 Transitions of the EFM surface
Consider a path in the(∆1, ∆2)-plane that takes one from a white region to another white
region, where the number EFM components does not depend on the value of dCp. It is clear
from figure 2.10 that any such path necessarily leads through (at leastone) (grey or orange)

34 Chapter 2. Classification of EFM structure
region where the EFM surface is such that the number of EFM components does actually
depend on the value ofdCp. For example, a single bandB may change into two bandsBB,
and the question arises what changes of the EFM surface itself are involved in this transition.
The point of view we take here is that the classification of the EFM surface into different
types is generated by five (local) transitions of codimension one, which we introduce now. Each
such transition changes the nature of the associated EFM components one encounters when
dCp is changed over[−π, π]. More specifically, we find four generic singularity transitions
that change the EFM surface topologically as a surface in three-dimensional space; as a result,
the number of EFM components changes locally. Furthermore, we considera cubic tangency
of the EFM surface with respect to a planedCp = const, which also changes the number of
EFM components locally.
The four singularity transitions
The codimension-one singularity transitions are characterised by the factthat an isolated sin-
gularity of the parametrised EFM surface is crossed at an isolated point ofa curve in the
(∆1, ∆2)-plane. To be more specific, letδ be the bifurcation parameter that parametrises a
curve in the(∆1, ∆2)-plane, where we assume that the respective bifurcation curve is crossed
transversely atδ = 0. We can then view the EFM surface in(ωs, dCp, Ns)-space locally near
δ = 0 as given by level setsF (ωs, dCp, Ns) = δ of a functionF : R3 → R. The singularity
is then given by the condition that grad(F ) = 0; generically, the Hessian at this point is non-
singular, which means that the singularity is of codimension one [1, 26, 53].In this case, the
surface is locally quadratic and has the normal form
F (u, v, w) = ±u2 ± v2 ± w2 = δ, (2.17)
where the signs are given by the signs of the eigenvalues of the Hessian at the singularity. If
all signs are the same then one is dealing with the transition through an extremum, that is, a
minimum or a maximum, of the surface; we speak of a minimax transition [41]. Otherwise,
the singularity is a saddle. The unfolding of such a saddle on a two-dimensional surface is
well know; see, for example, [2]. It is the transition form a one-sheetedhyperboloid via a
cone to a two-sheeted hyperboloid; we speak of a saddle transition [41].Different cases in
our context arise depending on how the cone associated with the saddle point is aligned in
(ωs, dCp, Ns)-space.
There are four distinct singularity transition of the EFM surface in(ωs, dCp, Ns)-space.
M the minimax transition through an extremum (a local minimum or maximum). The min-
imax transitionM of the EFM surface is illustrated in figure 2.12, where, in terms of

2.3. Classification of the EFM surface fordτ = 0 35
the projection onto the (ωs, dCp)-plane, it results in the creation or disappearance of an
island. The locus ofM in the (∆1, ∆2)-plane is represented by orange curves in what
follows.
SC the saddle transitions in the direction of theCp-axis. The saddle transitionSC of the EFM
surface is illustrated in figure 2.13, where, in terms of the projection onto the (ωs, dCp)-
plane, it results in a transition between an island and a band. The locus ofSC in the
(∆1, ∆2)-plane is represented by blue curves in what follows.
Sω the saddle transitions in the direction of theωs-axis. The saddle transitionSω of the EFM
surface is illustrated in figure 2.14, where, in terms of the projection onto the (ωs, dCp)-
plane, it results for example, in a transition between a band with a hole and two separate
bands. The locus ofSω in the (∆1, ∆2)-plane is represented by green curves in what
follows.
SN the saddle transitions in the direction of theNs-axis. The saddle transitionSN of the
EFM surface is illustrated in figure 2.15, where, in terms of the projection ontothe
(ωs, dCp)-plane, it results in the creation or disappearance of a hole in a band. The locus
of SN in the(∆1, ∆2)-plane is represented by red curves in what follows.
Figures 2.12–2.15 illustrate how the minimax transitionM and the three saddle transitions
SC , Sω andSN lead to changes in the EFM-surface. In each of these figures, we showin
the left column the relevant local part of the EFM surface in(ωs, dCp, Ns)-space before, at
and after the bifurcations. The right column shows how the projection of theEFM surface
onto the(ωs, dCp)-plane (shown over adCp-interval of 4π) changes accordingly; the local
regions where the change occurs are highlighted. In figures 2.12–2.15all the presented surfaces
have been rendered from continuations of the EFMs as solutions of equations (1.1)–(1.4); the
projections, on the other hand, were obtained directly from (2.16).
Figure 2.12 illustrates the minimax transitionM , where a compact piece of the EFM-
surface in(ωs, dCp, Ns)-space shrinks to a point. Panel (b1) is very close to the bifurcation;
note that after the bifurcation the piece is simply gone, which is why we do not present a sep-
arate illustration for this situation. In projection onto the(ωs, dCp)-plane, the local, compact
piece of the EFM-surface is an ‘island’ that shrinks and then disappears in a minimax transi-
tion of the projection; note that there are infinitely many such islands due to the translational
symmetry indCp; see panels (a2) and (b2).
Figure 2.13 illustrates the saddle transitionSC . The local mechanism for this change of
the EFM-surface in(ωs, dCp, Ns)-space is shown in panels (a1)–(c1). The surface in fig-
ure 2.13 (a1) is a one-sheeted hyperboloid. It develops a pinch point and, hence, becomes a
cone at the moment of bifurcation in figure 2.13 (b1); note that the cone (orrather its axis of

36 Chapter 2. Classification of EFM structure
−0.05 0 0.3−2
0
1.3
2
−0.05 0 0.3−2
0
1.3
2
(a1) (a2)
(b1)(b2)
ωs
ωs
dCp
π
dCp
π
Ns
Ns
ωs
ωs
dCp
π
dCp
π
.
.
Figure 2.12. Minimax transitionM of the EFM-surface in (ωs, dCp, Ns)-space, where a connected
component of the EFM surface (a1) shrinks to a point (b1). Panels (a2) and (b2) show the corresponding
projection onto the (ωs, dCp)-plane of the entire EFM surface; the local region where thetransitionM
occurs is highlighted by dashed lines and the projections ofthe part of the EFM surface in panels (a1)
and (b1) is shaded grey. HereΛ = 0.01, ∆1 = 0.4, and∆2 = 0.28 in (a) and∆2 = 0.28943 in (b).
rotation) is aligned with thedCp-axis. After the bifurcation, the EFM-surface is a two-sheeted
hyperboloid so that it consists locally of two parts; see figure 2.13 (c1). As the projections onto
the(ωs, dCp)-plane in panels (a2)–(c2) show, the overall result is the division of a ‘band’ into
a ‘string of islands.’ Note that the saddle transitionSC manifests itself as a saddle transition of
the projection, where the relevant (shaded) part of the surface is aligned with thedCp-axis.
Figure 2.14 illustrates the saddle transitionSω. Locally near the point of bifurcation we
again find that the EFM-surface in(ωs, dCp, Ns)-space changes from a one-sheeted hyper-
boloid in panel (a1), via a cone in panel (b1) to a two-sheeted hyperboloid in panel (c1). How-
ever, now the cone is aligned with theω-axis. As the projections onto the(ωs, dCp)-plane in
panels (a2)–(c2) show, overall we find that a single band with a ‘string of holes’ changes into
two separate bands. The saddle transitionSω manifests itself also as a saddle transition of the
projection, but now the relevant (shaded) part of the surface is aligned with theωs-axis.
Figure 2.15 illustrates the saddle transitionSN . In panel (a1) there are two sheets, with
different and separate values ofNs, of the EFM-surface in(ωs, dCp, Ns)-space. At the bifur-
cation point the two sheets connect locally in a single point. In the process, a‘hole’ is created

2.3. Classification of the EFM surface fordτ = 0 37
−0.05 0 0.26−2
0.2
0.9
2
−0.05 0 0.26−2
0.2
0.9
2
−0.05 0 0.26−2
0.2
0.9
2
(a1)(a2)
(b1)(b2)
(c1)(c2)
ωs
ωs
ωs
dCp
π
dCp
π
dCp
π
Ns
Ns
Ns
ωs
ωs
ωs
dCp/π
dCp/π
dCp/π.
.
Figure 2.13. Saddle transitionSC of the EFM-surface in (ωs, dCp, Ns)-space, where locally the
surface changes from a one-sheeted hyperboloid (a1) to a cone aligned in thedCp-direction (b1) to a
two-sheeted hyperboloid (c1). Panels (a2)–(c2) show the corresponding projection onto the (ωs, dCp)-
plane of the entire EFM surface; the local region where the transitionSC occurs is highlighted by
dashed lines and the projections of the part of the EFM surface in panels (a1)–(c1) is shaded grey. Here
Λ = 0.01, ∆1 = 0.4, and∆2 = 0.23 in (a),∆2 = 0.232745 in (b) and∆2 = 0.24 in (c).
in the EFM-surface, which then grows in size; see panels (b1) and (c1). If one considers a
small neighbourhood of the emerging hole, then one realises that the transition is locally that
from a two-sheeted hyperboloid in panel (a1), via a cone aligned along the Ns-axis in panel
(b1) to a one-sheeted hyperboloid in panel (c1). The projections onto the (ωs, dCp)-plane in
panels (a2)–(c2) clearly show how a string of holes appears in the saddle transitionSN . Note
that this bifurcation is a minimax transition of the projection but, in contrast to transition M ,

38 Chapter 2. Classification of EFM structure
−0.05 0 0.17−2
−0.6
0
0.6
2
−0.05 0 0.17−2
−0.6
0
0.6
2
−0.05 0 0.17−2
−0.6
0
0.6
2
(a1)
(a2)
(b1)
(b2)
(c1)
(c2)
ωs
ωs
ωs
dCp
π
dCp
π
dCp
π
Ns
Ns
Ns
ωs
ωs
ωs
dCp
π
dCp
π
dCp
π
.
.
Figure 2.14. Saddle transitionSω of the EFM-surface in (ωs, dCp, Ns)-space, where a connected com-
ponent (a1) pinches (b1) and then locally disconnects (c1);here the associated local cone in panel (b1)
is aligned in theωs-direction. Panels (a2)–(c2) show the corresponding projection onto the (ωs, dCp)-
plane of the entire EFM surface; the local region where the transitionSω occurs is highlighted by
dashed lines and the projections of the part of the EFM surface in panels (a1)–(c1) is shaded grey. Here
Λ = 0.01, ∆1 = 0.4, and∆2 = 0.13 in (a),∆2 = 0.133535 in (b) and∆2 = 0.135 in (c).
the projection of the surface is now ‘on the outside’ so that locally a hole is created instead of
an island.
It is an important realisation that the loci of the four singularity transitionsM , SC , Sω
andSN can be computed effectively, because it can be expressed as an implicit formula by
considering a suitable derivative of the envelope equation (2.9) with respect to the parameter in
question. More specifically, one follows a fold with respect todCp of the boundary curve of the

2.3. Classification of the EFM surface fordτ = 0 39
−0.05 0 0.15 −2
0
0.81.1
2
−0.05 0 0.15 −2
0
0.81.1
2
−0.05 0 0.15−2
0
0.81.1
2
(a1)
(b1)
(c1)
(a2)
(b2)
(c2)
ωs
ωs
ωs
dCp
π
dCp
π
dCp
π
Ns
Ns
Ns
ωs
ωs
ωs
dCp
π
dCp
π
dCp
π
.
.
Figure 2.15. Saddle transitionSN of the EFM-surface in (ωs, dCp, Ns)-space, where two sheets that
lie on top of each other in theNs direction (a1) connect at a point (b1) and then create a hole in the
surface (c1); here the associated local cone in panel (b1) isaligned in theN -direction. Panels (a2)–(c2)
show the corresponding projection onto the (ωs, dCp)-plane of the entire EFM surface; the local region
where the transitionSN occurs is highlighted by dashed lines and the projections ofthe part of the
EFM surface in panels (a1)–(c1) is shaded grey. HereΛ = 0.01, ∆1 = 0.4, and∆2 = 0.0.11 in (a),
∆2 = 0.11085 in (b) and∆2 = 0.1115 in (c).
projection of the EFM surface onto the(ωs, dCp)-plane. Such adCp-fold bound an interval
of dCp-values, which is either an island or a hole of the projection. When thedCp-fold is
continued along a curve (parametrised byδ) in the(∆1, ∆2)-plane, say,∆2 for fixed∆1, then
a singularity transition corresponds to a fold with respect to the continuation parameterδ. Such
a fold with respect to the parameterδ can be detected and then followed as a boundary curve

40 Chapter 2. Classification of EFM structure
−0.075 0 0.031
1.1
−0.075 0 0.031
1.1
−0.075 0 0.031
1.1
(a1)(a2)
(b1)(b2)
(c1)(c2)
ωs
ωs
ωs
dCp
π
dCp
π
dCp
π
Ns
Ns
Ns
ωs
ωs
ωs
dCp
π
dCp
π
dCp
π
.
.
Figure 2.16. Cubic tangencyC of the EFM-surface in (ωs, dCp, Ns)-space, where a part of the surface
(a1) becomes tangent to a planedCp = const (b1) and then develops a bulge (c1). The unfolding
of the cubic tangency into twodCp-folds can be seen clearly in the projections onto the (ωs, dCp)-
plane in panels (a2)–(c2). HereΛ = 0.015, and(∆1,∆2) = (−0.03,−0.0301) in (a), (∆1,∆2) =
(−0.04,−0.0401) in (b) and(∆1,∆2) = (−0.05,−0.051).
in the (∆1, ∆2)-plane. Note that this continuation approach makes no difference between
the casesM , SC , Sω andSN of singularity transitions. However, which of the singularity
transitions one is dealing with can readily be identified by checking the (projections of the)
EFM surface at nearby parameter point in the(∆1, ∆2)-plane. In this way, the loci of the
singularity transitions have been computed numerically to yield the complicated structure of
boundary curves in figure 2.17.

2.3. Classification of the EFM surface fordτ = 0 41
The cubic tangency
Due to the special role of the parameterdCp we also consider here a fifth local mechanism that
changes the type of the EFM surface.
C the cubic tangencyC of the EFM surface, is defined by the condition that the first and
second derivatives with respect toωs of equation (2.9) for the envelope ofΩ(ωs) both
vanish at an isolated point, and the third derivative is nonzero. The cubictangencyC of
the EFM surface is illustrated in figure 2.16, where, in terms of the projection onto the
(ωs, dCp)-plane, it results in the creation of a pair of local extrema ofdCp that form a
bulge of the EFM surface. The locus ofC in the(∆1, ∆2)-plane is represented by black
and grey curves in what follows.
Figure 2.16 illustrates the cubic tangencyC. Before the transition the EFM surface in
(ωs, dCp, Ns)-space is such that it does not featuredCp-folds of the boundary curve in pro-
jection onto the(ωs, dCp)-plane; see panels (a1) and (a2). At the moment of transition the
EFM surface is such that the boundary curve of the envelope has a cubic tangency with a curve
dCp = const; see panels (b1) and (b2). This cubic tangency of the boundary curve unfolds into
a pair of a local minimum and a local maximum ofdCp for nearby values ofωs; see panels (c1).
This pair of extrema corresponds to a ‘bulge’ of the EFM surface; see panels (c1). As a result,
there is now an interval ofdCp-values where one finds two distinct EFM components. Note
that the locusC of cubic tangency can be computed by numerical continuation of the condition
that the first two derivatives with respect toωs of the envelope equation (2.9) are zero.
2.3.4 The EFM surface bifurcation diagram in the(∆1, ∆2)-plane for fixed Λ
For a fixed value ofΛ the five transitionsM , SC , Sω, SN andC of codimension one give rise
to boundary curves that divide the(∆1, ∆2)-plane into a finite number of regions. Each such
region defines a type of the EFM surface and, overall, we speak of the EFM surface bifurcation
diagram in the(∆1, ∆2)-plane.
We first consider in figure 2.17 the EFM surface bifurcation diagram forthe caseΛ = 0.01.
As in figure 2.10, the white regions correspond to the band-like types of theEFM surface from
section 2.3.2 with adCp-independent number of EFM components. In the grey regions, on the
other hand, one finds new EFM surface types. In figure 2.17 we labelledthose types that are
associated with transitions between the band-like EFM surface types; thereare a total of 15
additional types, and their representatives are shown in figure 2.18; for notation and parameter
values of the individual panels see Table 2.2. As before, the symbolB denotes a connected

42 Chapter 2. Classification of EFM structure
hB
Bh
hB Bh
hhB
hhBB
hh
Bhh
HHH
BBB
hBh
HHHhBh
BBB
BB
BB
BhB BBh
hBB BhB
hBI BI
LL
LBhI
BBh
BBI
IBB
BBI
BB
BB
BBBB
B
hB
Bh
!!! hBI
BI
aaaBhI
B
hB
Bh
aaaIhB
IB
!!!IBh
JJJIIB
IB
IB IBB
IBB
JJ
JBII
BI
BIBBI
BBI
LLLIhB IB
IBh IBB
AAAIBI
AA
AIBI
IB
IB BBBhB B Bh
IB
B BBhB B Bh
BB BI
BI
BB
BB
BBB
BBB
hBB
BB
BB
hBBBB
BBh
BI
M SC Sω SN SN Sω SC M
∆1
∆2
−0.55
0
0.55
−0.55 0 0.55
.
.
Figure 2.17. EFM surface bifurcation diagram in the(∆1, ∆2)-plane forΛ = 0.01 with regions of
different types of the EFM surface; see figure 2.18 for representatives of the labelled types of the EFM
surface and Table 2.2 for the notation. The main boundary curves are the singularity transitionsM
(orange curves),SC (blue curves),Sω (green curves) andSN (red curves). The locus of cubic tangency
(black curves) can be found near the diagonal; also shown is the anti-diagonal.
component of the EFM surface in the form of a band in projection onto the (ωs, dCp)-plane
that extends over the entireCp-range[−π, π].
There are two noteworthy features of the EFM surface types in figure 2.18. First of all,
there are connected components of the EFM surface that do not extend over the entireCp-range
[−π, π]; we use the symbolI to refer to them because their projection onto the(ωs, dCp)-plane
consists of an ‘island’ whendCp ∈ R/2πZ (infinitely many islands in the covering space when
dCp ∈ R). Owing to the underlying symmetry(∆1, ∆2) 7→ (−∆1, −∆2), we again represent

2.3. Classification of the EFM surface fordτ = 0 43
(a)
BI
(b)
BII
(c)
IBI
(d)
Bh
(e)
IBh
(f)
IhB
(g)
Bhh
(h)
hBh
(i)
BBI
(j)
BBI
(k)
BhB
(l)
BBh
(m)
hBB
.
.
Figure 2.18. Additional types of EFM-surface of the 2FOF laser in the labelled regions of figure 2.17,
represented by the projection (shaded) onto the (ωs, dCp)-plane; the blue boundary curves are found
directly from (2.16). For notation and the corresponding values of∆1 and∆2 see Table 2.2; in all panels
ωs ∈ [−0.3, 0.3] anddCp ∈ [−π, π].
in the notation the position of an island with respect to the central bandB. As second new
feature is the fact that a band may have up to two (periodically repeated) holes. Similarly to the
islands, we reflect in the notation the position of a hole with respect to the central frequency of
the laser (atωs = 0). Namely, we indicate with left and right subscripts whether a hole is to
the left or to the right ofωs = 0; for example, we distinguish the caseBhh from hBh. We
observe that islands never have holes for any values of the parametersas considered here; this
means that the symbolI does never have a subscript.
In figure 2.18 we again show only one representative for any pair that isrelated by sym-
metry. Obtaining a representative of the symmetric counterpart corresponds to a reflection of
the respective image in the lineωs = 0; this operation is reflected in the notation by reversing
the symbol string representing the EFM surface type. In figure 2.17 this symmetry operation
corresponds to reflection in the antidiagonal of the(∆1, ∆2)-plane. Notice also the symmetry

44 Chapter 2. Classification of EFM structure
name Cmin Cmax panel ∆1 ∆2 Λ
BI 1 2 figure 2.18 (a) 0.255 -0.270 0.01
BII 1 3 figure 2.18 (b) 0.260 0.210 0.01
IBI 1 3 figure 2.18 (c) 0.254 -0.251 0.01
Bh 1 2 figure 2.18 (d) 0.100 -0.270 0.01
IBh 1 3 figure 2.18 (e) 0.100 -0.250 0.01
IhB 1 3 figure 2.18 (f) -0.100 0.250 0.01
Bhh 1 3 figure 2.18 (g) 0.160 0.110 0.01
hBh 1 3 figure 2.18 (h) 0.095 -0.110 0.01
BBI 2 3 figure 2.18 (i) 0.250 0.190 0.01
BBI 2 3 figure 2.18 (j) 0.250 -0.130 0.01
BhB 2 3 figure 2.18 (k) 0.210 0.100 0.01
BBh 2 3 figure 2.18 (l) 0.180 0.130 0.01
hBB 1 3 figure 2.18 (m) 0.210 -0.100 0.01
Table 2.2. Notation and parameter values for the types of EFM-surface in figure 2.18; the second and
third column show the minimal numberCmin and the maximal numberCmax of EFM components (for
suitable fixeddCp) of the type.
of the EFM surface bifurcation diagram given by reflectio in the diagonal;it corresponds to an
exchange of the two filters and, hence, does not change the EFM surface type.
The outer part of the EFM surface bifurcation diagram in figure 2.17, away from the diag-
onal, is characterised by grey intersecting strips, which are each bounded by a pair of curves
of singularity transitions. These strips must be crossed in the(∆1, ∆2)-plane to move between
different white regions of band-like types of the EFM surface. As an example, consider a suf-
ficiently large fixed value of one of the detunings, say, of∆1, while the other detuning,∆2, is
allowed to change. The grey strip bounded by the pair of curvesM andSC is responsible for
the transition from a single bandB to two bandsBB via the appearance of a string of islands
that then merge into the new bandB. The pairSN andSω, on the other hand, also results in
a transition fromB to BB, but via the appearance of a string of holes inB that then merge to
form a gap that splits off the new bandB. Note that the illustrations of the singularity transi-
tions in figures 2.12–2.15 are all for∆1 = 0.4; hence, they also illustrate the transition fromB
to BB via SN andSω and back toB via SC andM as∆2 is increased from, say,∆2 = 0.
The grey strips in figure 2.17 are unbounded and extend all the way to infinity. This follows
from the fact that the limit∆i → ±∞ reduces to the single FOF laser in a nontrivial way, as
was discussed in section 2.3.1. More specifically, for the chosen value ofΛ = 0.01 the curve
in the (∆1, Λ)-plane of figure 2.8 (b) is intersected four times, and this accounts for the four
stripes one finds for∆2 → ±∞ (and similarly for∆1 → ±∞).

2.3. Classification of the EFM surface fordτ = 0 45
−0.12 0 0.12 −3
−2
−1
0
1
−0.12 0 0.12 −3
−2
−1
0
1 (a) (b)
ωs ωs
dCp
πdCp
π
.
.
Figure 2.19. Projection of the EFM-surface onto (ωs, dCp)-plane forΛ = 0.01. Panel (a) is for
∆1 = −∆2 = 0.003 and panel (b) is for∆1 = −∆2 = 0.08.
The anti-diagonal is shown in figure 2.17 because along it one finds special, degenerate
cases of the EFM surface. There are two different cases, and they are shown in figure 2.19.
Along the red part of the anti-diagonal we find a degenerate saddle transition SN . At the
moment of transition the upper and lower sheets of the EFM surface touch ata single, isolated
point (and its2π-translates indCp); see figure 2.19 (a). However, as figure 2.17 shows, on
either side of the red part of the anti-diagonal we find the symmetrically relatedpair hB and
Bh, which each features a hole. Hence, when the red part of the anti-diagonal is crossed, the
hole shrinks and then reappears on the other side of the lineωs = 0; physically, the hole is on
the side of the filter that is detuned furthest from the solitary laser frequency. From a bifurcation
point of view, along the red part of the anti-diagonal the EFM surface changes locally from a
two-sheeted hyperboloid to a cone and back to a two-sheeted hyperboloid, rather than to a
one-sheeted hyperboloid; compare with figure 2.15 for the non-degenerate saddle transition
SN .
Along the grey part of the anti-diagonal, on the other hand, we find a degenerate saddle
transitionSC . Notice that the EFM surface type on either side of this grey curve is the same
and invariant under the symmetry operation∆1 7→ −∆2. Figure 2.19 (b) shows the moment
of transition for the case that the anti-diagonal bounds the two regions of EFM surface type
hBh in figure 2.17. In this transition the two holes (and their2π-translates indCp) touch to
form a lemniscate in figure 2.19 (b). This means that the EFM surface is connected (locally)
at isolated points withωs = 0. We also found this degenerate type of connection of the EFM
surface at such isolated points in figure 2.9 — for the case that the surface is of typeB, and
for the case that it is of typeBBB. In effect, along the grey part of the anti-diagonal the EFM
surface changes locally from a one-sheeted hyperboloid to a cone andback to a one-sheeted
hyperboloid, rather than to a two-sheeted hyperboloid; compare with figure 2.13 for the non-
degenerate saddle transitionSC .

46 Chapter 2. Classification of EFM structure
B Bh
Bh
bBhh
bBhh
bBb
h
bBbh
Bbb
Bbb
Bbb
Bbbb
Bbbb
Bb
Bb
Bb
Bbb
Bbbh
Cd
SC
SN
Ca
DCNC
∆1
∆2
0
0.1
0 0.1.
.
Figure 2.20. Enlargement near the center of the(∆1, ∆2)-plane of figure 2.17 with (blue) curves
of SC transition, (red) curves ofSN transition, and (black) curvesCa and (grey) curvesCd of cubic
tangency; see figure 2.21 for representatives of the labelled types of the EFM surface and Table 2.3 for
the notation.
The locus of cubic tangency in the(∆1, ∆2)-plane
In figure 2.17 one finds (black) curves of cubic tangency near the diagonal in the central region
of the(∆1, ∆2)-plane. To understand their role for the EFM surface bifurcation diagram, we
show in figure 2.20 an enlargement of the(∆1, ∆2)-plane near the central (white) region where
the EFM surface is of typeB. Recall that this central region must exist as a perturbation of the
special case of the EFM surface for∆1 = ∆2 = 0 in figure 2.9 (a); from the physical point
of view, this type of EFM surface exists (forκ 6= 0) as the continuation of the solitary laser
mode forκ = 0. Note that forΛ = 0.01, as in figures 2.17 and 2.20, this central region is quite
small; however, as we will see in section 2.4, it may grow considerable when the filter widthΛ
is increased.
The central (white) region of EFM surface typeB in figure 2.20 is bounded entirely by
curves of cubic tangency. Therefore, as the filters are detuned awayfrom the solitary laser
frequency, the first transformation of the EFM-surface that gives rise to an additional EFM-
component is a cubic tangency. We find it convenient to distinguish two different types of

2.3. Classification of the EFM surface fordτ = 0 47
(a)
Bb
(b)
Bbb
(c)bBb
(d)
Bbbb
(e)bBbb
(f)bbBbb
(g)
Bbbbb
(h)
BIb
(i)
BIbb
(j)
hBb
(k)
Bbh
(l)
hBbb
(m)
Bbbh
(n)
BBb
(o)
BBbb
.
.
Figure 2.21. Additional types of EFM-surface of the 2FOF laser that feature bulges, represented by the
projection (shaded) onto the (ωs, dCp)-plane; the blue boundary curves are found directly from (2.16).
Where necessary, insets show local enlargements. The corresponding regions in the(∆1, ∆2)-plane
can be found in figures 2.20, 2.25 and 2.29; for notation and the corresponding values of∆1, ∆2 andΛ
see Table 2.3. In all panelsωs ∈ [−0.3, 0.3] anddCp ∈ [−π, π].
cubic tangency. The (black) curvesCa are invariant under reflection in the anti-diagonal; they
correspond to cusp points of the orange curves in figures 2.7 and 2.10.The (grey) curvesCd are
invariant under reflection in the anti-diagonal; they correspond to cusp points of the grey curves
in figures 2.7 and 2.10. The (black) cubic tangency locusCa consists of two elongated and self-
intersecting closed curves, one above and one below the diagonal; see figure 2.17. The (grey)
cubic tangency locusCd also consists of two self-intersecting closed curves, but they cross the
diagonal and one lies above and the other below the anti-diagonal; see figure 2.20 and note that
the locusCd is too small to be visible in figure 2.17.
Crossing either of the boundary curvesCa andCd from inside the central (white) region
labelledB in figure 2.20 results in the appearance of a bulge of the EFM surface. Werepresent
this in our notation of this region asBb by a superscriptb; as before, whether the superscript

48 Chapter 2. Classification of EFM structure
name Cmin Cmax panel ∆1 ∆2 Λ
Bb 1 2 figure 2.21 (a) -0.0200 0.2000 0.098
Bbb 1 2 figure 2.21 (b) 0.1320 0.1300 0.010bBb 1 3 figure 2.21 (c) -0.2400 0.2300 0.098
Bbbb 1 3 figure 2.21 (d) 0.1400 0.1300 0.010bBbb 1 3 figure 2.21 (e) -0.2300 0.2170 0.098bbBbb 1 3 figure 2.21 (f) -0.2140 0.2150 0.098
Bbbbb 1 3 figure 2.21 (g) -0.2350 0.1780 0.020
BIb 1 3 figure 2.21 (h) 0.2100 0.1900 0.010
BIbb 1 3 figure 2.21 (i) 0.2150 0.1850 0.098
hBb 1 3 figure 2.21 (j) -0.2120 0.2400 0.098
Bbh 1 3 figure 2.21 (k) 0.1300 0.1161 0.010
hBbb 1 3 figure 2.21 (l) -0.2120 0.2200 0.098
Bbbh 1 3 figure 2.21 (m) 0.1337 0.1161 0.010
BBb 2 3 figure 2.21 (n) 0.2100 0.1600 0.010
BBbb 2 3 figure 2.21 (o) 0.1530 0.1355 0.010
Table 2.3. Notation and parameter values for the types of EFM-surface in figure 2.21; the second and
third column show the minimal numberCmin and the maximal numberCmax of EFM components (for
suitable fixeddCp) of the type.
appears on the left or on the right of the central bandB indicates its position with respect to
the solitary laser frequency given byωs = 0. As figure 2.20 shows, we find a complicated
EFM surface bifurcation diagram consisting of an interplay of cubic tangency curvesCa andCd
with saddle-transition curvesSC andSN . The four sets of curves divide the(∆1, ∆2)-plane
into regions of additional EFM surface types, which are all characterised by a certain number
of bulges as represented in the notation. The corresponding EFM surface types are shown in
projection onto the (ωs, dCp)-plane in figure 2.21 (a), (b), (d), (k) and (m); for notation and
parameter values of the individual panels see Table 2.3. Note that near thecentral region of the
(∆1, ∆2)-plane the EFM surface is subject to the interaction of both filters near the frequency
of the laser, which means that there are no other bands or islands.
Figure 2.20 also shows that crossing the saddle-transition curveSC may result in the cre-
ation of a hole, which happens, for example, in the transition fromBbbb to Bbh. This new
mechanism for the creation of a hole is illustrated in figure 2.22 for the simpler case of a tran-
sition fromBbb to Bh; see also figure 2.21 (b) and figure 2.18 (d). In figure 2.22 (a1) and (a2)
there are two bulges; one of the bulges is rather small, indicating that it has just been created
in a nearby cubic tangency. At the saddle transitionSC in figure 2.22 (b) we find that the two
bulges connect locally in the central point of a cone that is aligned in thedCp-direction. In

2.3. Classification of the EFM surface fordτ = 0 49
−0.065 0 0.040.9
1.2
−0.065 0 0.040.9
1.2
−0.065 0 0.040.9
1.2
(a1)
(b1)
(c1)
(a2)
(b2)
(c2)
ωs
ωs
ωs
dCp
π
dCp
π
dCp
π
Ns
Ns
Ns
ωs
ωs
ωs
dCp
π
dCp
π
dCp
π
.
.
Figure 2.22. Global manifestation of local saddle transitionSC of the EFM-surface where two bulges
connect to form a hole. Panels (a1)–(c1) show the relevant part of the EFM surface and panels (a2)–
(c2) the corresponding projection onto the(ωs, dCp)-plane. HereΛ = 0.015 and∆2 = −0.02, and
∆1 = −0.0248 in (a),∆1 = −0.02498 in (b) and∆1 = −0.0252 in (c).
contrast to the case shown in Figure 2.13, the geometry of the EFM surfaceis now such that
this bifurcation leads to the creation of a hole; see panels (c1) and (c2). This hole can then
disappear again when the (red) curveSN in figure 2.20 is crossed; for example, this happens in
the transition fromBbh to Bb.
The connection between cubic tangency and the singularity transitions is given by codimension-
two points on the locus of cubic tangency. This feature is prominent in figure 2.20, where
curvesSN (red) andSC (blue) of saddle transition end at (purple) points on the (grey) curve
Cd. In figure 2.23 we present a local unfolding of such a codimension-two point, which is char-

50 Chapter 2. Classification of EFM structure
4
4 − 1
C
1 1 − 2
SN
2 2 − 3
SC
3
3 − 4
C
SN
SC
CDCNC
1
2
3
4
DCNC
∆1
∆2
.
.
Figure 2.23. Sketch of the bifurcation diagram in the(∆1, ∆2)-plane near the (purple) codimension-
two pointDCNC on the curveC of cubic tangency, from which the (red) curveSN and the (blue) curve
SC of saddle transition emanate; compare with figures 2.20 and 2.29 (a) and (b).
4
4 − 1
C
1 1 − 2
M2 2 − 3
Sω
3
3 − 4
C
M
Sω
CDCMω
1
2
3
4
DCMω
∆1
∆2
.
.
Figure 2.24. Sketch of the bifurcation diagram in the(∆1, ∆2)-plane near the (golden) codimension-
two pointDCMω on the curveC of cubic tangency, from which the (orange) curveM and the (green)
curveSω of saddle transition emanate; compare with figures 2.17 and 2.28.

2.3. Classification of the EFM surface fordτ = 0 51
acterised by the fact that the envelope curve given by (2.9) has a cusppoint. When making a
circle around the codimension-two pointDCNC on the curveC, starting at region 1, one finds
that a hole appears near the boundary of EFM surface in the saddle transitionSN ; compare with
figure 2.22. The hole then disappears in the saddle transitionSC . As a result, there are now
two bulges, that is, pairs of local maxima and minima with respect todCp, which disappear one
after the other when the cubic tangency curveC is crossed twice to complete the circle back to
region 1. This unfolding can indeed be found locally in figure 2.20, but note that it involves
the EFM surface of typeBb as that corresponding to region 1 in figure 2.23; hence, region 2
corresponds toBbh, region 3 toBbbb, and region 4 toBbb.
A second case of a codimension-two point on the curve of cubic tangencycan be found in
figure 2.17, where the curvesM (orange) andSω (green) end at (golden) points on the (black)
curveCa. The local unfolding of such a codimension-two point is presented in figure 2.24;
it is again characterised by a cusp point on the envelope curve given by(2.9), but this time
the cusp points the other way with respect to the EFM surface. When making acircle around
the codimension-two pointDCNC on the curveC, starting at region 1, an island is created
when the minimax transitionM is crossed; this island then merges with the remainder of
the EFM surface in the saddle transitionSω. As a result, there are again two bulges, which
disappear one after the other when the curveC is crossed twice to complete the circle back
to region 1. This unfolding can be found locally in figure 2.17, where EFM surface of type
BI corresponds to region 1 in figure 2.23; hence, region 2 correspondsto BII, region 3 to
BIbb, and region 4 toBIb. Note that, in terms of the envelope curve (2.9), the unfolding
in figure 2.24 is topologically equivalent to that in figure 2.23. However, thetwo unfoldings
differ in where (the projection of) the EFM surface lies with respect to the boundary; hence, the
respective panels of figure 2.23 and figure 2.24 (where the EFM surface is always on the left)
can be transformed into one another by exchanging the colours blue and white in the regions,
followed by a reflection.
Note that figure 2.21 shows the comprehensive list, in order of increasingcomplexity, of
EFM surface types that feature bulges — of which there are quite a few more than we identified
in figure 2.20. Additional EFM surface types can be found near the diagonal of the(∆1, ∆2)-
plane, but further away from the central point∆1 = ∆2 = 0. Figure 2.25 (a) shows the
respective enlargement of the EFM surface bifurcation diagram from figure 2.17, which fea-
tures an interaction of cubic tangency curvesCa with saddle-transition curvesSC andSω. We
find five additional EFM surface types with bulges, representatives of which in the (ωs, dCp)-
plane are also shown in figure 2.21 (h), (i), (k), (n) and (o); for notation and parameter values of
the individual panels see again Table 2.3. Note, in particular, that crossing the saddle-transition
curveSω may lead to secondary bands or islands with bulges.
To obtain the remaining cases of EFM surface types with bulges in figure 2.21it is nec-
essary to change the filter width parameterΛ. As an example of how new regions of EFM

52 Chapter 2. Classification of EFM structure
Bbb
BI
Bbh
Bbh
Bbb
b
Bbb
b
Bbbh
Bbbh
Bhh
Bhh
BBb
BBb
BIb
BIb
BBbb
BBbb
BBh
BBh
@@BIbb
@@BIbb
Sω SC Ca
Bbb
BI
BIb
BIb
BIbb
BIbb
Bbbb
Bbbb Bbbbb
Bbbbb
Bbbh
Bbbh
Bbh
Bbh
BBbb
BBbb
Sω SC Ca(a)
∆1
∆2
0.12
0.17
0.12 0.17
(b)
∆1
∆2
0.25
0.150.15 0.25
.
.
Figure 2.25. Enlargement near the diagonal of the(∆1, ∆2)-plane with (blue) curves ofSC transi-
tion, (green) curves ofSω transition, andSC transition, and (black) curvesCd of cubic tangency; see
figure 2.21 for representatives of the labelled types of the EFM surface and Table 2.3 for the notation.
Panel (a) is forΛ = 0.01 as figure 2.17, and panel (b) is forΛ = 0.02
surface types are created in a subtle way with changingΛ, figure 2.25 (b) shows a similar en-
largement as panel (a), but now forΛ = 0.02. Notice that the relative position of the curveSω
has changed in such a way that one finds a region where the EFM surface is of typeBbbbb; see
figure 2.21 (g). The location in(∆1, ∆2, Λ)-space of all EFM surface types in figure 2.21 can
be found in Table 2.3; we will encounter more types in the next section.
2.4 Dependence of the EFM surface bifurcation diagram on the
filter width Λ
We now consider more globally how the EFM surface bifurcation diagram in the (∆1, ∆2)-
plane changes with the common filter widthΛ. Figure 2.7 already indicated that substantial
changes to the regions of band-like EFM types must be expected. In particular, for sufficiently
largeΛ the grey and orange curves in figure 2.7 do not extend to infinity in the(∆1, ∆2)-plane
any longer. To study this phenomenon we compactify the(∆1, ∆2)-plane by the stereographic
change of coordinates
∆i =∆i
|∆i| + η, η > 0. (2.18)
Note that (2.18) transforms the(∆1, ∆2)-plane to the square[−1, 1]×[−1, 1] in the(∆1, ∆2)-
plane, where∆i = ±1 corresponds to∆i = ±∞; we speak of the(∆1, ∆2)-square from now

2.4. Dependence of the EFM surface bifurcation diagram on the filter widthΛ 53
0
0
0
0
0
0
0
0
0
0
0
0
B
BB
B
BB
B
BB
BB
BB
BB
B
B
B
BB
B
BB
B
BB
BBB@@
BB
BB
BBB@@
BB
BBB
BBB
B
BB
B
BB
B
BB
BB
BB
BB
B
B
B
BB
B
BB
B
BB
BBB@@
BB
BB
BBB@@
BB
B
B
B
B
B
B
B
B
B
B bB
bBB
B bB
bBB
B bB bBB
B bB bBB
B
B
B
B
BCa
Cd
B
Ca
Cd
B
Ca
Cd
∆1
∆1
∆1
∆1
∆1
∆1
∆2
∆2
∆2
∆2
∆2
∆2
(a)
(c)
(e)
(b)
(d)
(f)
.
.
Figure 2.26. EFM surface bifurcation diagram in the compactified(∆1, ∆2)-square,[−1, 1]× [−1, 1],
showing regions of band-like EFM surface types; compare with figure 2.10. The boundary of the square
corresponds to∆i = ±∞; from (a) to (e)Λ takes valuesΛ = 0.01, Λ = 0.015, Λ = 0.06, Λ =
0.098131, Λ = 0.1 andΛ = 0.13.
on. The parameterη is the value of∆i that is mapped to∆i = 0.5, and we choseη = 0.4 to
ensure that the main structure of the EFM surface bifurcation diagram in the(∆1, ∆2)-plane

54 Chapter 2. Classification of EFM structure
is represented well in the(∆1, ∆2)-square.
Figure 2.26 shows the EFM surface bifurcation diagram in the(∆1, ∆2)-square in the style
of figure 2.10, where (orange and grey) boundary curves are shown for 61 equidistant values
of dCp from the interval[−π, π]. The (white) regions of band-like EFM surface types are
labelled; see Table 1.1. Also shown are the cubic tangency curvesCa (black) andCd (grey).
Figure 2.26 (a) forΛ = 0.01 is simply the compactified version of figure 2.10 in the
(∆1, ∆2)-square. Notice that the (orange and grey) stripes now end at discretepoints at the
sides of the square. Namely, for∆i = ±∞ the respective filter does not influence the laser
any longer, so that the system reduces to single FOF laser on the sides of the (∆1, ∆2)-square.
Hence, the end points of the stripes are exactly the four intersection points of the line Λ =
0.01 with the light grey limiting curve in figure 2.8 (b). AsΛ is increased, the areas of other
EFM surface types covered by (orange and grey) curves expandsand four (symmetry-related)
smaller regions of band-like EFM surface typesBBB andBBB disappear; see figure 2.26 (b).
As Λ is increased further, additional regions of band-like EFM surface types disappear; see
figure 2.26 (b). In the process the pairs of (orange and grey) stripesmove closer together,
owing to the fact that the four intersection points with the light grey curve in figure 2.8 (b) do
the same. Moreover, the (black and grey) cubic tangency curves extend over a much larger
region of the(∆1, ∆2)-square; hence, the region near∆1 = ∆2 = 0 where one finds EFM
surface typeB opens up considerably.
Figure 2.26 (d) is forΛ = 0.098131, which is the approximate value ofΛ where one
finds the cusp points of the grey limiting curve in figure 2.8 (c). This value canbe computed
analytically as
ΛC =2
3√
3κ√
1 + α2 (2.19)
from the formula in [28] for the single FOF laser. In the context of the EFM surface bifurcation
diagram, this values corresponds to a bifurcation at infinity of the(∆1, ∆2)-plane and, hence,
a bifurcation at the boundary of the(∆1, ∆2)-square. More specifically, forΛ = ΛC the pairs
of orange and grey stripes now end at single points. the cubic tangency curvesCa (black) and
Cd (grey) extend all the way to the boundary of the square. Notice further that the central region
of EFM surface typeB is no longer bounded by curves of cubic tangency but is now joined
up with four, previously separated regions of the same type. ForΛ > ΛC the stripes do no
longer extend to the boundary of the square. As a result, one now finds orange and grey pairs
of islands that are bounded almost entirely by (black and grey) cubic tangency curves. The
complement of these islands is a single connected (white) region of EFM surface typeB; see
figure 2.26 (e). WhenΛ is increased further, these islands become smaller; see figure 2.26 (f).

2.4. Dependence of the EFM surface bifurcation diagram on the filter widthΛ 55
(a1) (a2) (a3)
(b1) (b2) (b3)
DCNC
DCMω
DCMω
DCNC
SC
SN
SC
SN
SC
SN
Ca CaCa
Sω M
B
Bh
BB
Bbb
Bb
BI
B B
Bh
Bbb
Bb
BB
Bh
Bbb
Bb
B
IB
BB
bbB
bB
hB
B B
I bB
bbB
bB
BB
I bB
bbB
bBSω
M
Sω
M
Sω
M
Cd CdCd
SC SN
∆1 ∆1 ∆1
∆1 ∆1 ∆1
∆2 ∆2 ∆2
∆2 ∆2 ∆2
.
.
Figure 2.27. Sketch of EFM surface bifurcation diagram near the boundary∆2 = −1 of the
(∆1, ∆2)-square in the transition throughΛ = ΛC . Panels (a1)–(a3) show the transition involving
the (black) curveCa of cubic tangency that bounds the orange islands, and panels(b1)–(b3) show the
transition involving the (grey) curveCd of cubic tangency that bounds the grey islands; compare with
figure 2.26 (c)–(e).
2.4.1 Unfolding of the bifurcation at infinity
As we know from section 2.3.4, the boundaries of the orange and grey regions are formed not
only by the curvesCa andCd of cubic tangency, but also by the singularity transitionsM , SC ,
Sω andSN . Figure 2.27 shows how these boundary curves interact in the transition through
Λ = ΛC in a neighbourhood of the respective point on the boundary of the(∆1, ∆2)-square.
There are two cases: one for the orange regions and one for the greyregions in figure 2.26.
Row (a) of figure 2.27 shows the transition for the grey regions, which involves the (grey)
cubic tangency curveCd; labels in the regions indicate the respective EFM surface type. Before
the bifurcation forΛ < ΛC the grey region extends to two points on the boundary of the
(∆1, ∆2)-square. As we have seen in figure 2.17, these points are the limits of the pairof
curvesM andSC and of the the pair of curvesSω andSN , respectively; see figure 2.27 (a1).
Notice further that the singularity transition curvesSN andSC end at a (purple) codimension-
two pointDCNC on the cubic tangency curveCd; compare with figure 2.23. The EFM surface
types in the respective regions are also shown. WhenΛC is approached, the two limit points
of the pairs of curvesM andSC andSω andSN approach each other. At the same time,
the codimension-two point, and the curveCa with it, approach the boundary of the(∆1, ∆2)-
square; as a result, the curvesSN andSC become shorter. At the moment of transition at

56 Chapter 2. Classification of EFM structure
B B
BBb
BbbBb
BI
M
Sω
DCMω
DCMω
Cd0.26
0.26
0.97
0.97∆1
∆2
.
.
Figure 2.28. Grey island forΛ = 0.1 in the(∆1, ∆2)-plane with regions of non-banded EFM surface
types; compare with figure 2.26 (e).
Λ = ΛC , shown in figure 2.27 (a2), the grey region is bounded by the minimax transition curve
M and by one branch of the cubic tangency curveCd, which both end at a single point on the
boundary. The curveSω and a second branch ofCd also end at this point on the boundary. For
Λ > ΛC , as in figure 2.27 (a3), all curves detach from the boundary of the(∆1, ∆2)-square;
furthermore, the singularity transition curvesM andSω are now attached to the cubic tangency
curveCd at a (golden) codimension-two pointDCMω; compare with figure 2.24. Hence, the
grey island created in this transition, which is invariant under reflection in thediagonal, is
bounded by the curvesCd andM .
Row (b) of figure 2.27 shows the transition for the orange regions, whichinvolves the
(black) cubic tangency curveCa; again, the respective EFM surface type are indicated. This
transition is very similar to that in figure 2.27 (a), but notice that it now involvesa (golden)
codimension-two pointDCMω on the curveCa for Λ < ΛC , and a (purple) codimension-
two pointDCNC for Λ > ΛC . As a result of this transition the orange island created in this
transition, which is invariant under reflection in the anti-diagonal, is bounded by the curvesCa
andSN .
2.4.2 Islands of non-banded EFM surface types
The grey islands are associated with the diagonal where∆1 = ∆2, along which the 2FOF laser
reduces to the single FOF laser with effective feedback rate given by (2.11). Hence, the width
of the grey islands along the diagonal is determined by the intersection points of the horizontal

2.4. Dependence of the EFM surface bifurcation diagram on the filter widthΛ 57
line for the given value ofΛ with the curve in figure 2.8 (c). A grey island forΛ = 0.1 is shown
in figure 2.28. It contains regions of (non-banded) EFM surface types Bb, Bbb andBI, which
are bounded by the cubic tangency curveCd and singularity transition curvesM (orange) and
Sω (green); the latter curves end at two (golden) pointsDCMω on the curveCd. WhenΛ is
increased, the grey islands remain topologically the same and simply shrink downto a point.
This happens whenΛ has the value of the cusp points of the curve in figure 2.8 (c), which can
again be computed analytically from the formula in [28] for the single FOF laseras
ΛI = 2 ΛC =4
3√
3κ√
1 + α2 ≈ 0.196261. (2.20)
Furthermore, we can conclude from the single FOF limit along the diagonal that the two sym-
metric grey islands disappear at
∆1 = ∆2 = ∆Id =8√
2
3√
3κ√
1 + α2 ≈ 0.555111. (2.21)
For Λ > ΛI the EFM surface bifurcation diagram in the(∆1, ∆2)-square — and, hence, also
in the(∆1, ∆2)-plane — does no longer contain (grey) islands that are symmetric with respect
to the diagonal.
The orange islands that exist forΛ > ΛC are associated with the anti-diagonal where
∆1 = −∆2. Figure 2.29 (a) shows an orange island forΛ = 0.1 with regions of (non-banded)
EFM surface types; see also the enlargement in the inset panel. Apart from the cubic tangency
curveCa, we find curvesSC (blue) andSN (red) of singularity transition. Two curvesSC
emerge from a boundary point of the island on the anti-diagonal where four branches ofCa
connect in a pair of cusps. The two curvesSC follow two branches ofCa closely and end at
two (purple) pointsDCNC on the curveCa. The two curvesSN emerge from a different point
on the anti-diagonal and also followsCa closely to the same two end points. The (red) section
of the anti-diagonal in between the two points from which the curvesSC andSN emerge,
respectively, corresponds to a degenerate saddle transitionSN . The remainder of the anti-
diagonal corresponds to a degenerate saddle transitionSC ; see the discussion in section 2.3.4.
Overall, we find a quite complicated but consistent structure of the orange island. It features the
(non-banded) EFM surface typesBh, hBh, Bb, Bbb, hBb, bBb, hB
bb, bBbb andbbBbb, of which
the last five EFM types with bulges are new; compare with figure 2.21.
As Λ is increased, the orange island undergoes topological changes. First,the (purple)
end points of the curvesSC andSN move across a branch of the cubic tangency locusCa.
As a result, the entire island is now bounded byCa and the regionsBh and Bbb (and their
symmetric counterparts) disappear; see figure 2.29 (b). The next qualitative change concerns
the cubic tangency locusCa, which loses two intersection points, resulting in the loss of two
(symmetrically related) regions of EFM typesbB and Bb; see figure 2.29 (c). WhenΛ is

58 Chapter 2. Classification of EFM structure
B
B
bB
Bb
bbBbBb
bBb
SN DCNC
DCNC
SC
Ca
hB/bbB AA
hBh
bBbb
bbBhB
b
hBbb
ZZbbBbb
bBh
hbB
.
.
B
B
Bb
bB
hbB
bBh
bBb
bB
Bb
SC
Ca
SNDCNC
DCNC
.
.
B
B
Bb
bB
hB
Bh
bBb
Ca
SC
.
.
B
B
Bb
bB
hB
Bh
Ca
SC
.
.
∆1 ∆1
∆2
∆2
(c)
-0.45
-0.05
0.05 0.45
(d)
0.15 0.35-0.35
-0.15
(a)
-0.97
0.28
0.28 -0.97
(b)
0.05 0.45-0.45
-0.05
.
.
Figure 2.29. Orange island in the(∆1, ∆2)-plane with regions of non-banded EFM surface types; the
inset in panel (a) shows the details of curves and regions. From (a) to (d)Λ takes the valuesΛ = 0.1,
Λ = 0.145, Λ = 0.166 andΛ = 0.179; compare panel (a) with figure 2.26 (e).
increased further, two intersection points of curvesCa on the anti-diagonal come together and
merge into a point where four branches ofCa connect. The result is the loss of regionbBb; see
figure 2.29 (d). We found that the orange island does not undergo further qualitative changes,
but rather shrinks down to a point and disappears. This happens atΛ =≈ 0.196261, and
this numerical value agrees up to numerical precision with that forΛI from (2.20). In fact,
consideration of (2.9) for∆1 = −∆2 confirms this observation; furthermore, the position of
where the islands disappear can be computed as
∆1 = −∆2 = ∆Ia = ∆Id/4 =2√
2
3√
3κ√
1 + α2 ≈ 0.138778. (2.22)

2.5. The effect of changing the delay difference∆τ 59
Overall we conclude that forΛ > ΛI there are no islands at all, so that the entire(∆1, ∆2)-
plane consists of a single region of EFM typeB. Physically, this means that the two filters are
so wide that they reflect light of different frequencies effectively in the same way; hence, the
feedback is no longer frequency selective, and the 2FOF laser is a 2COF laser for sufficiently
largeΛ.
2.5 The effect of changing the delay difference∆τ
Equation (2.16) for the boundary of the projection of the EFM surface onto the(ωs, dCp)-plane
expressesdCp as a function ofωs. In this equation the delay time differencedτ appears only
as the coefficient of the linear term ofωs; hence, a nonzero value ofdτ introduces a shearing
of the EFM surface with a shear rate of exactlydτ .
This shearing of the EFM surface can be made explicit for the special case that∆1 = ∆2,
when still considering a single filter widthΛ for both filters. Namely, then we can define the
center line of the projection of the EFM surface as the line through the points where the inverse
cosine term in (2.16) vanishes. The equation for this center line is then simply
dCp(ωs) = −dτωs, (2.23)
which is simply the line with slopedτ through the origin of the(ωs, dCp)-plane. Since the
ωs-range of the EFM surface does not change withdτ , a nonzerodτ indeed leads to a shear
with a shear rate equal to the slope of the center line of the projection of the EFM surface.
We conclude that an EFM surface fordτ 6= 0 can be obtained simply by considering the
corresponding EFM surface fordτ = 0 and shearing it with a shear rate ofdτ . As a result of
this shearing, EFM components may be present fordτ 6= 0 that are not present fordτ = 0.
Figure 2.30 illustrates this effect with the example of the EFM surface for∆1 = ∆2 = 0
andΛ = 0.015 with τ1 = 500 andτ2 = 600, so that the shear rate isdτ = 100. Notice
that this EFM surface is the sheared version of the corresponding EFM surface fordτ = 0 in
figure 2.5, which is of typeB. The EFM surface in figure 2.30 still consists of all2π-translates
of a basic unit, which are connected at the points wheredCp = π + 2kπ for k ∈ Z; however,
now the basic unit of the EFM surface extends over adCp-range of more than2π. While
there is always a single EFM component for any value ofdCp for the case thatdτ = 0, due
to the shear fordτ = 100 we now find up to three EFM components in figure 2.30. Each of
those EFM components belongs to a different 2π-translated copy of the basic unit of the EFM
surface. Physically, this is due to beating between two frequencies that are associated with the
two feedback loops, of different delay times; see Eqs. (2.2)–(2.4).

60 Chapter 2. Classification of EFM structure
−0.1 0 0.1−0.02
0
0.02
−0.1 0 0.1−0.02
0
0.02
−0.1 0 0.1−0.02
0
0.02
−0.1 0 0.1−0.02
0
0.02
(a)
0.02
Ns
0
-0.023
dCp
π
0
-1
-3-0.1
0ωs
0.1
(b)
(d)
(c)
(e)
ωs
ωs
ωs
ωs
Ns Ns
Ns Ns
.
.
Figure 2.30. The EFM surface (a) forκ = 0.05, ∆1 = ∆2 = 0, Λ = 0.015, andτ1 = 500 andτ2 = 600
so thatdτ = 100, and its intersection with the planes defined bydCp = 0 anddCp = −π; compare
with figure 2.5. Panels (b)–(e) show the EFM-components fordCp = 0, dCp = −π/2, dCp = −π and
dCp = −3π/2, respectively; the blue dots are the EFMs forC1
p as given by (2.12).
As is shown in figure 2.30 (b)–(e), the exact number of EFM components depends on the
value ofdCp. More specifically, fordCp = 0 there are three EFM-components, owing to the
fact that the corresponding plane in(ωs, dCp, Ns)-space intersects three copies of the basic
unit of the EFM surface; see figure 2.30 (a) and (b). AsdCp is changed the EFM components
change. FordCp = −π/2 as in panel (c), there are still three EFM components (the right and

2.5. The effect of changing the delay difference∆τ 61
−0.1 0 0.1−0.02
0
0.02
−0.1 0 0.1−0.02
0
0.02
−0.1 0 0.1−0.5
0
0.5
−0.1 0 0.1−0.5
0
0.5(a1)
(a2)
(b1)
(b2)
ωs
ωs
ωs
ωs
T (ωs) T (ωs)
Ns Ns
.
.
Figure 2.31. Solution curves of the transcendental equation (2.3) and corresponding EFM components
for dCp = 0, where the dots show the actual EFMs forC1
p=0; hereκ = 0.05, ∆1 = ∆2 = 0, Λ = 0.015,
τ1 = 500, anddτ = 200 in panels (a) anddτ = 300 in panels (b). The inset of panel (b2) shows that
the EFM components are in fact disjoint.
central EFM components are not connected), but left of the two outer ones has become smaller
and right one larger. WhendCp is decreased further, the left EFM component disappears (in a
minimax transition when the planedCp = const passes through the end point of the respective
part of the EFM surface). FordCp = −π as in figure 2.30 (d), the two remaining EFM
components connect at the origin of the(ωs, Ns)-plane to form a single EFM component in the
shape of a figure eight. We remark that, because fordCp = −π equation (2.9) is equal to 0 at
ωs = 0, this case for the 2FOF laser corresponds to the situation described in [64] where single
FOF laser is resonant to the minimum of the Fabry-Pérot filter reflectance profile. The single
EFM component then splits up again into two EFM components fordCp < −π. A new EFM
component appears (again in a minimax transition) on the right, that is, for positive ωs, so that
there are again three EFM components; see figure 2.30 (e) fordCp = −3π/2.
Notice that, since the detunings of both filters are equal, the EFM surface in figure 2.30 (a)
is invariant under the anti-diagonal symmetry operation(ωs, dCp, Ns) 7→ (−ωs, −dCp, −Ns).
As a result, panel (b) and (d) are invariant under rotation overπ of the (ωs, Ns)-plane, while
panels (c) and (e) are symmetric counterparts.
Figure 2.31 shows that with an increased shear of the EFM surface of type B, more EFM
components can be found; specifically, up to five fordτ = 200 and up to seven fordτ = 300.
This is illustrated in figure 2.31 by the EFM solution curve inside its envelope (toprow) and

62 Chapter 2. Classification of EFM structure
−0.15 0 0.16−3.3
−1.6
0
1.5
−0.15 0 0.16−0.03
0
0.04
−0.15 0 0.16−3.3
−1.6
0
1.5
−0.15 0 0.16−0.03
0
0.04
(a1) (a2)
(b1) (b2)
ωs
ωs
Ns
Ns
dCp
π
dCp
π
ωs
ωs
.
.
Figure 2.32. The EFM surface of typehBB for dτ = 0 (a1) and its EFM components fordCp = −1.6π
(a2), and the corresponding sheared EFM surface fordτ = 230 (b1) and its EFM components for
dCp = −1.6π (b2). Hereκ = 0.05, ∆1 = 0.13, ∆2 = −0.1, Λ = 0.01, andτ1 = 500.
by the respective EFM components in the(ωs, Ns)-plane (bottom row). Figure 2.31 clearly
shows that for sufficiently largedτ any number of EFM components can be found, even when
the EFM surface fordτ = 0 is of the simplest possible typeB.
Finally, figure 2.32 shows the effect of shearing on the more complicated EFM surface of
typehBB. As panels (a1) and (a2) show, this EFM surface type fordτ = 0 may give rise to
up to three EFM components. When it is sheared with a sheer rate ofdτ = 230, however, one
may find up to six EFM components. Notice that this increase in the number of possible EFM
components is due to the shearing of the strongly undulating boundary of central band, as well
as to the shearing of the holes in it, which now extend over adCp range of more than2π.
2.6 Conclusion and outlook
We presented a comprehensive study of the EFM structure of the 2FOF in dependence on the
parameters of the two filtered feedback loops. The main object of study is theEFM surface
in (ωs, dCp, Ns)-space, which is a generalisation of the EFM components for the single FOF
laser. A combination of analysis and extensive numerical continuations of EFMs allowed us

2.6. Conclusion and outlook 63
to present the EFM surface bifurcation diagram in the(∆1, ∆2)-plane for the special case that
the delay time differencedτ is zero. More specifically, we considered five transitions through
critical points and a cubic tangency with respect to the phase differencedCp between the two
filter loops, which emerged as a key parameter. These transition give rise toboundary curves
that divide the(∆1, ∆2)-plane into regions of different EFM surface types. We then studied
how the EFM surface bifurcation diagram in the(∆1, ∆2)-plane depends on the widthΛ of
the two filters. Finally, nonzerodτ was shown to cause a shearing of the corresponding EFM
surface fordτ = 0, and this may give rise to any number of EFM components.
Our classification of the EFM surface is justified by physical properties ofthe 2FOF laser,
which translate to specific properties of the transcendental equations forthe EFMs. For exam-
ple, there are no islands with holes. What is more, the classification of the EFMsurface as
induced by the five singularity transitions considered was motivated by the fact that they could
all be shown to lead to changes of the number of EFM components over substantial ranges of
the relevant parameters, in particular,dCp.
In a way, the influence of the two filter loops on the laser can be consideredas the feed-
back from a single feedback loop with a complicated filter profile — with several maxima and
minima of the transmittance as a function of the frequency of the light. This filter profile is the
result of interference between the two filter fields. This point of view provides a connection to
studies that considered the output of a laser subject to feedback from anon-Lorentzian, more
complicated filter profile, such as the periodic filter profiles in [50, 64]. In the case of [64],
feedback is considered from a Fabry-Pérot cavity not only close to thetransmittance maxi-
mum, but over a large spectral range that encompasses several maxima and minima of the
transmittance. In [50], on the other hand, filtered feedback with severalmaxima and minima of
the transmittance arise due to side ‘bumps’ of a fibre Bragg grating filter profile. As we have
observed, the observations in [50] and [64] correspond in the 2FOF laser simply to a change
from constructive to destructive interference between the two filter fieldsvia a variation of the
filter phase differencedCp. A further analysis of the connections between the 2FOF laser and
feedback from other types of filters is an interesting question for future research.
Obviously, an important practical issue is to determine when the EFMs are actually stable.
In other words, the next step in the analysis of the 2FOF laser, which is the subject of the next
chapter, is hence the investigation of regions of their stability on the EFM surface.


Chapter 3
EFM stability regions
In the previous chapter we investigated analytically and numerically the structure of external
filtered modes (EFMs) – constant amplitude and frequency solutions to Eqs.(1)–(4). Our
analysis shows that, in the conveniently chosen(ωs, Ns, dCp)-space, EFMs exist on a compli-
cated two-dimensional surface that may consist of up to three disjoint components that are2π
periodic in thedCp-direction.
The EFM surface illustrates how frequencyωs and population inversionNs of the EFMs
depend on the feedback phasesC1p andC2
p , with all other parameters fixed. In other words,
the EFM surface represents all the possible states that an EFM can take for all the possible
values ofC1p andC2
p , for given values of the other parameters. The important parameter here
is the feedback phase differencedCp = C2p − C1
p , so that it is most convenient to consider the
two-dimensional EFM surface in(ωs, Ns, dCp)-space; see section 2.2.
In this chapter we analyse the stability of the EFMs. In particular, we use bifurcation analy-
sis to uncover regions of stable EFMs on the two-dimensional EFM surfacein (ωs, Ns, dCp)-
space. These regions are bounded by codimension-one saddle-nodeand Hopf bifurcation
curves, which meet or intersect at codimension-two saddle-node Hopf,Bogdanov-Takens and
Hopf-Hopf bifurcation points.
As is the case for the EFMs themselves, their stability depends on all laser, filters and
feedback loop parameters. Here we show how the number, shape, and extent of the stability
regions depend on the filters and feedback loops parameters. More specifically, we consider
their dependence on the feedback ratesκ1 andκ2, filter widthsΛ1 andΛ2, the filter frequency
detunings∆1 and∆2, and the delay timesτ1 andτ2. We explain the uncovered changes of
the EFM stability regions in terms of higher codimension bifurcations in conjunction with the
changing geometry of the EFM surface.
To analyse the stability of the EFMs we fix all the system parameters except thefeedback
phasesC1p andC2
p . By means of numerical continuation we then calculate the EFM surface
65

66 Chapter 3. EFM stability regions
together with information about stability of the EFMs. This allows us to render theEFM surface
in (ωs, Ns, dCp)-space with stability information on it. Throughout, regions with stable EFMs
are marked as hatched green patches on the EFM surface; the remaining grey area represents
unstable EFMs. In fact, to indicate the stable EFMs area on three-dimensional image of the
EFM surface we use the actual stable parts of the computed EFM branches. In other words,
each green line on the semitransparent grey EFM surface is the result ofa single numerical
continuation.
To explain and illustrate our results, we also consider the two-dimensional projections of
the EFM surface onto the(ωs, dCp)-plane and the(ωs, Ns)-plane. In section 2.3 we used the
(ωs, dCp)-projections to present our classification into different types of the EFM surface. As
before, the white regions on the(ωs, Ns)-plane are regions where no EFM exist. The boundary
of the projections of the EFM surface onto the the(ωs, dCp)-plane is found directly from Eq.
(2.16) and is now coloured in grey instead of blue. The blue region that represented the inside
of the projection in section 2.3 is now divided into regions of stable and unstable EFMs that
are coloured green and grey, respectively. This colouring of the(ωs, dCp)-projections is in
agreement with the colouring of the EFM surface itself. For clarity, we use solid green filling
to indicate the stable EFM regions in the projections, instead of hatching.
As in chapter 2, both the top and the bottom sheet of the EFM surface are projected onto the
(ωs, dCp)-plane; this means that each typical (non-boundary) point in the(ωs, dCp)-projection
of the EFM surface correspond to two EFMs with differentNs values. We show that the EFM
stability region extends mostly over the bottom sheet of the EFM surface, which corresponds
to higher gain modes. However, for some parameter values stable EFMs canalso be found
on the top sheet of the EFM surface. In those rare cases when the two stable EFM regions are
separated byNs i.e. lay above one another, the corresponding area in the(ωs, dCp)-projections
is coloured in dark green.
The boundary of a region of stable EFMs involves a number of saddle-node bifurcations
and Hopf bifurcation curves that are connected at codimension-two bifurcations points. These
bifurcations form curves on the EFM surface in(ωs, Ns, dCp)-space. Those curves intersect
at Hopf-Hopf and saddle-node Hopf bifurcations. At points where thesaddle-node and Hopf
bifurcation curves merge, and the Hopf bifurcation curve ends, Bogdanov-Takens bifurcations
are located. Note that for clarity, out of all codimension-two bifurcations,we only label the
Bogdanov-Takens bifurcations.
Throughout this chapter saddle-node bifurcation curves are depictedas blue curves on the
EFM surface and the Hopf bifurcation curves are shown as red curves on the EFM surface.
Moreover, for the purpose of this analysis we calculate only the bifurcation curves that are
part of the boundary of the EFMs stability regions, or are useful to explain their changes. All
regions and curves in the projections of the EFM surface onto the(ωs, Ns)-plane, are coloured
in the same way as in the(ωs, dCp)-projections.

3.1. Dependence of EFM stability onκ 67
In chapter 2 we showed that the geometrical and topological properties ofthe EFM surface
depend strongly on the filters and feedback loop parameters. In this chapter we analyse how the
stability regions interact with the singularity transitions of the EFM surface in(ωs, Ns, dCp)-
space. As a guideline in this challenging task we use the classification of the EFM surfaces
introduced in section 2.3. In particular, we are interested in changes of theEFM stability
regions associated with the saddle transitions of the EFM surface. Clearly,changes of the
stable EFM regions must be expected as a result of changes of the EFM surface topology.
However, there may also be changes to the EFM stability regions that are dueto changes of the
EFM surface geometric properties.
In what follows we analyse separately the dependence of the EFM surface on the common
feedback rateκ, the common filter widthΛ, the filter detunings∆1 and∆2, and the difference
dτ between the delay times. To uncover the information on the stability of EFMs, we first fix
parameters at conveniently chosen values and compute the EFM surface with relevant informa-
tion on the EFMs stability. Next, we vary the parameter under investigation, andobserve how
the EFM stability regions transform with changes of the EFM surface in(ωs, Ns, dCp)-space.
This chapter is structured as follows. In section 3.1 we analyse how regions of stable EFMs
change with an increase of the feedback rateκ. Next, in section 3.2 we present how the stable
regions are affected by the transition from the 2FOF laser to the COF laser as Λ → ∞. Both
these chapters show that, although topologically the EFM surface remains unchanged of type
B, the stability of EFMs is substantially affected byκ as well asΛ. Moreover, we use the
results from sections 3.1 and 3.2 to choose convenient values ofκ andΛ for the following
sections. Section 3.3 shows how the regions of stable EFMs split as the EFM surface gradually
transforms fromB via hBh andBBB to IBI with increasing filter frequency detunings∆1
and∆2. In section 3.4 we explain how the EFM stability is affected by shearing of the EFM
surface that is introduced by decreasingdτ . Finally, we briefly describe the kinds of periodic
solutions originating from the Hopf bifurcations in section 3.5, and discuss possible physical
consequences of the transformations of the EFMs stability regions in section4.1.
3.1 Dependence of EFM stability onκ
We start our analysis with the 2FOF laser with two identical filters with equal delay times. In
section 2.2 we showed that in this case the EFM surface is of the simplest typeB, and con-
sist of infinitely manydCp-periodic compact units that are connected with each other in the
points,(ωs, Ns, dCp) = (0, 0, (2n + 1)π) with n ∈ Z. In this section, we explain the depen-
dence of the EFM surface in(ωs, Ns, dCp)-space on the feedback rateκ. While increasingκ
causes an expansion of the EFM surface in theωs andNs directions, its topology is unaffected.
Nevertheless, we demonstrate that the expansion of the EFM surface leads to a change in the

68 Chapter 3. EFM stability regions
number, extent, and type of boundaries of the EFM stability regions. What ismore, we show
that above a particular value ofκ, despite further expansion of the EFM surface, the(ωs, Ns)-
projection of the EFM stability region remains unchanged. For this study, we fix Λ = 0.015,
∆1 = 0, ∆2 = 0, anddτ = 0.
Figure 3.1 (a1)–(c1) shows the fundamental2π interval of the EFM surface forκ = 0.01
in (a), κ = 0.015 in (b) andκ = 0.025 in (c). In panels (a2)–(c2) and (a3)–(c3) we show
projections of the stability regions of EFMs onto the(ωs, Ns)-plane and onto the(ωs, dCp)-
plane, respectively.
In figure 3.1 (a)–(c) the boundary between regions of stable EFMs andunstable EFMs al-
ways consist of seven Hopf bifurcation curves and one saddle-nodebifurcation curve. Intersec-
tions of those codimension-one bifurcation curves are codimension-two Hopf-Hopf and saddle-
node Hopf bifurcation points. Note that for these parameter values considered Bogdanov-
Takens bifurcations do not occur.
Increasingκ results in an expansion of the EFM surface in theωs andNs directions; see
panels (a1)–(c1). To understand the expansion of the EFM surface,it is enough to notice that
Ns scales linearly withκ; see Eq. (2.5). Moreover, for∆1 = ∆2 = 0, a common filter width
Λ, anddτ = 0, the extrema ofωs are given by
ωexts = ±1/2
√−2 Λ2 + 2 Λ
√Λ2 + 16κ2 + 16κ2α2. (3.1)
Concurrently with the monotonic growth of extrema ofωs, the EFM stability region changes.
When the oval shaped Hopf bifurcation curve around the point(ωs, dCp) = (0, 0) in figure 3.1
(a3) — the one that forms the lower boundary of the stability region in panel (a2) — intersects
with two other Hopf bifurcation curves, then the single region of stable EFMsfrom panel (a)
splits into two; see figure 3.1 (b). A further increase ofκ causes the separation distance of those
two regions to grow; compare figure 3.1 rows (b) and (c). What is more, although the range of
dCp in which stable EFMs exist decreases and the whole EFM surface grows,the projection
of the EFM stability regions onto the(ωs, Ns)-plane in panels (b) and (c) stays unchanged.
These results are in agreement with the observation that the 2FOF laser canbe reduced to a
FOF laser; see also section 2.2.
The expansion of the EFM surface in theωs andNs directions is the simplest geometrical
effect caused by a change of filter and feedback loop parameters. Weshowed that, although the
topology of the EFM surface remains unchanged of typeB, increasingκ results in a shrinking
of the stable EFM regions in the(ωs, dCp)-plane. Considering that we are interested in the
dependence of the EFMs stability region on parameters, in all following sections we fix the
feedback rate atκ = 0.01 — a representative value at which the region of stable EFMs extends
over the whole fundamental2π interval ofdCp.

3.1. Dependence of EFM stability onκ 69
−0.04 0 0.04−0.008
0
0.008
−0.04 0 0.04−1
0
1
−0.04 0 0.04−0.008
0
0.008
−0.04 0 0.04−1
0
1
−0.04 0 0.04 −0.008
0
0.008
−0.04 0 0.04−1
0
1
(a1)
κ = 0.01
(a2)
(a3)
(b1)
κ = 0.015
(b2)
(b3)
(c1)
κ = 0.025
(c2)
(c3)
ωs
ωs
ωs
ωs
ωs
ωs
Ns
Ns
Ns
dCp
π
dCp
π
dCp
π
0
0
0
0
0
0
0
0
0
ωs
ωs
ωs
dCp/π
dCp/π
dCp/π
Ns
Ns
Ns
.
.
Figure 3.1. Dependence of the EFM surface on the feedback rateκ (as indicated in the panels); here
∆1 = ∆2 = 0, Λ = 0.015 anddτ = 0. Panels (a1)–(c1) show the EFM-surface in(ωs, Ns, dCp)-space
(semitransparent grey) together with information about the stability of the EFMs. Panels (a2)–(c2) show
corresponding projections of the EFM surface onto the(ωs, Ns)-plane and panels (a3)–(c3) onto the
(ωs, dCp)-plane. Regions of stable EFMs (green) are bounded by Hopf bifurcations curves (red) and
saddle node bifurcation curves (blue). In panels (a1)–(c1)ωs ∈ [−0.065, 0.065], dCp/π ∈ [−1, 1] and
Ns ∈ [−0.013, 0.013].

70 Chapter 3. EFM stability regions
−0.11 −0.05 0 0.05 0.011−0.021
−0.01
0
0.01
0.021
Λ = 0.5
Λ = 0.025
Λ = 0.015
Λ = 0.001
Λ = 0.005
ωs
Ns
.
.
Figure 3.2. Dependence of the EFM surface on the filter widthΛ = Λ1 = Λ2 (as indicated); here
∆1 = ∆2 = 0, κ = 0.01 anddτ = 0. Light grey regions with black envelopes are projections, for five
different values ofΛ, of the EFM surface onto the(ωs, Ns)-plane.
3.2 Dependence of EFM stability onΛ
In sections 2.3.1 and 2.4 we showed that, asΛ → ∞, the 2FOF laser approaches the COF laser
limit. More specifically, we showed that increasingΛ leads to the simplification of the topology
of the EFM surface — regions corresponding to EFM surface types other thenB shrink and
disappear. We now explore the dependence of EFM stability regions on thefilter width Λ.
We demonstrate that the fast growth of the EFM surface that leads to the simplification of its
topology, results also in changes of the EFM stability. In particular, we showthat the stable
EFM region expands with increasing filter width; for sufficiently highΛ it is bounded by a
single saddle-node bifurcation curve and a single Hopf bifurcation curve. Throughout this
section we fixκ = 0.01, ∆1 = 0, ∆2 = 0, anddτ = 0. Notice that, as in the previous
section, for∆1 = 0 and ∆2 = 0 copies of the EFM surface are connected at the points
(ωs, Ns, dCp) = (0, 0, (2n + 1)π) with n ∈ Z.
Figure 3.2 illustrates the expansion of the EFM surface with increasingΛ. The black lines
are the envelopes of five projections of the EFM surface (grey) onto the(ωs, Ns)-plane for
different values ofΛ, as indicated on the figure. Note that the range ofωs of the EFM surface
for Λ = 0.5 is ten times larger then the range of theωs of the EFM surface forΛ = 0.001. Note
also that all the envelopes have two common points atωs = 0. The difference between theωs-
range of the envelope forΛ = 0.5 and for the EFM components of COF laser is|max(ωCOFs )−
min(ωCOFs )|−|max(ωΛ=0.5
s )−min(ωΛ=0.5s )| = 0.004; hereωΛ=0.5
s is given by Eq. (3.1) and
ωCOFs = ±κ
√1 + α2. This shows that already forΛ = 0.5 the 2FOF laser with two identical
filters with equal delay times is very close to the COF limit ofΛ = ∞.

3.2. Dependence of EFM stability onΛ 71
We now investigate how the region of stable EFMs is affected by this expansion of the
EFM surface withΛ. Figure 3.3 (a1)–(d1) shows the fundamental2π interval of the EFM
surface together with the EFM stability information forΛ = 0.001 in (a), Λ = 0.005 in (b),
Λ = 0.025 in (c) andΛ = 0.5 in (d). In panels (a2)–(d2) we show corresponding projections of
the EFM surface onto the(ωs, Ns)-plane. Projections of the EFM surfaces from figure 3.3 onto
the(ωs, dCp)-plane are shown in figure 3.4. Black dots indicate codimension-two Bogdanov-
Takens bifurcation points; curves and regions are coloured as in figure3.1.
Given the expansion of the EFM surface, each row in figure 3.3 and corresponding panel
in figure 3.4 is presented over a different range of theωs andNs axes. (This is in contrast to
figure 3.2, where the(ωs, Ns)-projections of all the EFM surfaces from Figure 3.3 (a)–(d) are
shown together on the same scale.) Note also that, figure 3.2 also includes the projection of the
EFM surface from figure 3.1 (a) forΛ = 0.015.
With increasingΛ the region of stable EFMs and its boundary undergo several complicated
transitions; see figures 3.3 (a)–(d) and 3.4 (a)–(d). Figures 3.3 (a) and 3.4 (a), forΛ = 0.001,
show the EFM stability region bounded by one saddle-node bifurcation curve (blue) and three
Hopf bifurcation curves (red). Moreover, in addition to Hopf-Hopf (HH) and saddle-node Hopf
(SH) bifurcation points located at the intersections of the codimension-one bifurcation curves,
one can also find Bogdanov-Takens (BT) bifurcation points; see figure3.3 (a) and (b).
Further, in figures 3.3 (b) and 3.4 (b), forΛ = 0.005, the picture becomes more complicated
and the number of the Hopf bifurcation curves involved in the boundary increases to five. Next,
for sufficiently highΛ, the boundary of the stable EFM regions again simplifies, and consist
of a single saddle-node bifurcation curve at the top and a single Hopf bifurcation curve at the
bottom. Moreover, the region of stable EFMs expands and covers most of the projection of the
EFM surface onto the(ωs, dCp)-plane; see figures 3.3 (c) and 3.4 (c) forΛ = 0.025.
Finally, in figures 3.3 (d) and 3.4 (d), we show that with a further increaseof Λ the EFM
stability region remains qualitatively unchanged. In comparison to figures 3.3(c) and 3.4 (c),
we observe a further expansion of the EFM surface and growth of the region of unstable EFMs
in the direction of positiveωs.

72 Chapter 3. EFM stability regions
−0.011 0 0.011 −0.005
0
0.005
−0.025 0 0.025 −0.005
0
0.005
−0.05 0 0.05−0.01
0
0.01
−0.11 0 0.11−0.021
0
0.021
(a1)
Λ = 0.001
(a2)
(b1)
Λ = 0.005
(b2)
(c1)
Λ = 0.025
(c2)
(d1)
Λ = 0.5
(d2)
ωs
ωs
ωs
ωs
Ns
Ns
Ns
Ns
0
0
0
0
0
0
0
0
0
0
0
0
ωs
ωs
ωs
ωs
dCp/π
dCp/π
dCp/π
dCp/π
Ns
Ns
Ns
Ns
.
.
Figure 3.3. Dependence of the stability region on the EFM surface on the common filter widthΛ (as
indicated in the panels); here∆1 = ∆2 = 0, κ = 0.01 anddτ = 0. Panels (a1)–(d1) show the EFM-
surface in(ωs, Ns, dCp)-space (semitransparent grey) together with information about the stability of
the EFMs. Panels (a2)–(d2) show corresponding projectionsof the EFM surface onto the(ωs, Ns)-
plane. Black dots indicate codimension-two Bogdanov-Takens bifurcation points; curves and regions
are coloured as in figure 3.1. In panels (a1)–(d1)dCp ∈ [−π, π], and the ranges ofNs andωs are as in
panels (a2)–(d2).

3.2. Dependence of EFM stability onΛ 73
−0.011 0 0.011 −1
0
1
−0.025 0 0.025 −1
0
1
−0.05 0 0.05 −1
0
1
−0.11 0 0.11 −1
0
1
(a) (b)
(c) (d)
ωs ωs
ωs ωs
dCp
πdCp
π
dCp
πdCp
π
.
.
Figure 3.4. Projections of the EFM surfaces presented in figure 3.3 (a1)–(d1) onto the(ωs, dCp)-
plane. Black dots indicate codimension-two Bogdanov-Takens bifurcation points; curves and regions
are coloured as in figure 3.1.
By increasingΛ we move between two limiting cases. ForΛ = 0.001 our findings are in
qualitative agreement with results for thlocus semiconductor laser subject tooptical injection
[72], whose locking region is bounded by the saddle-node curve and two Hopf curves that
originate from the BT points. On the other hand, forΛ = 0.5 we are in agreement with the
findings for the COF laser [57, 30, 43, 47, 38]. The region of stable EFMs is shifted towards the
lower values of the population inversionNs which correspond to a stable maximum gain modes
in the COF laser [47]. Moreover, similarly to the COF laser case, stable EFMsin figure 3.3 (d)
become unstable in Hopf bifurcation that give rise to relaxation oscillations [43, 47, 62]; see
section 3.5.
Figures 3.3 and 3.4 showed that the number of the Hopf bifurcation curvesthat form the
boundary of the EFMs stability regions depends strongly onΛ. However, the details of these
changes are not shown by these figures. To explain the observed transitions in more detail, we
now consider changes to the number of Hopf bifurcation curves bounding the EFMs stability
regions, as well as to the number and type of the codimension-two bifurcations points involved

74 Chapter 3. EFM stability regions
in the boundary.
Figure 3.5 shows how the boundary of the region of stable EFMs changeswith an increase
of the filter width fromΛ = 0.001 to Λ = 0.025. Our findings are presented in the(ωs, Ns)-
projections of the EFM surface. Black dots indicate codimension-two BT bifurcation points;
curves and regions are coloured as in figure 3.1. For clarity, the different Hopf bifurcations
curves are labeledH1 to H5 in panels (a)–(b) andH1 to H7 in panels (e)–(j).
The number of the Hopf bifurcation curves changes due to transitions of the EFM surface
for fixed Λ through extrema and saddles of the Hopf surfaces in(C1p , dCp, Λ)-space, which
also manifest themselves in(ωs, Ns, Λ)-space — called also minimax transitions and saddle
transitions, respectively [17]. Moreover, changes of type and number of codimension-two
bifurcation points on the boundary of stable EFM region are associated withtransitions through
codimension-three points, as discussed below.
In figure 3.5 (a)–(d) we show how with increasingΛ the number of the Hopf bifurcations
curves that form the boundary of the EFMs stability region increases from three to five. Ad-
ditionally, we show that the change in the number of Hopf bifurcation curvesconstituting the
boundary of EFMs stability regions is followed by the disappearance of four BT bifurcation
points and the emergence of four HH bifurcation points and four SH bifurcation points. Note
that in the(ωs, Ns)-projections only half of the mentioned codimension-two points is visible;
compare with figure 3.4.
Figure 3.5 (a)–(b) are projections of the EFM surface onto the(ωs, Ns)-plane forΛ =
0.003 andΛ = 0.004. In comparison to figure 3.3 (a) we show two additional Hopf bifurcation
curves,H4 andH5, that become part of the boundary in figure 3.5 (c) forΛ = 0.005. Note that
H4 andH5 intersect with saddle-node curve at SH points.
In figure 3.5 (a) and (b) the left part of the boundary of the stable EFM region involves
a single Hopf curveH2 that ends at two BT points; only one of which is seen in the view in
figure 3.5. In contrary in panel (c) it involves two Hopf curvesH2 andH4 that intersect at HH
points. This change is due to two separate transitions: first, theH2 andH4 curves connect at a
degenerate HH point and then the BT point moves through a SH point; at the degenerate HH
point H2 andH4 curves are tangent to each other. Such codimension-three points, where the
SH and the BT points meet (also called Bogdanov-Takens-Hopf points), occur also for the FOF
laser, as is mentioned in [17].
Note that, after passing the SH point, the BT points disappear. This happensdue to the
following transition. AsΛ is increased the two BT points move further along the saddle-node
curve and meet at its end; compare with figure 3.4 (a) and (b). At this pointthe BT points at
the two ends of Hopf curveH2 merge, so thatH2 is tangent to the saddle-node curve. At such
degenerate BT point [17, 10] two BT points merge and the Hopf curveH2 detaches from the

3.2. Dependence of EFM stability onΛ 75
−0.025 0 0.025 −0.005
0
0.005
−0.025 0 0.025 −0.005
0
0.005
−0.025 0 0.025 −0.005
0
0.005
−0.025 0 0.025 −0.005
0
0.005
(a)
Λ = 0.003
H1
H4
H2
H3
H5
(b)
Λ = 0.004
H1
H4
H2
H3
H5
(c)
Λ = 0.005
H1
H4
H2
H3
H3
H5
H5
(d)
Λ = 0.006
H1
H4
H2
H3
H5
ωs ωs
ωs ωs
Ns Ns
Ns Ns
.
.
Figure 3.5. Projections of the EFM surface onto the(ωs, Ns)-plane, for increasing filter widthΛ as
indicated in the panels; here∆1 = ∆2 = 0, κ = 0.01 anddτ = 0. Black dots indicate codimension-two
Bogdanov-Takens bifurcation points; curves and regions are coloured as in figure 3.1.
saddle-node curve; in the(ωs, Ns)-projection in figure 3.5 only one of the BT points moving
along the saddle-node curve is visible.
The transitions through the codimension-three points at theH2 andH4 curves and at the
H3 andH4 curves, do not occur concurrently. In the enlargement in figure 3.5 (c) we show that
there still exist BT points at the ends ofH3; compare with figure 3.4 (b). However, the Hopf
bifurcation curvesH3 andH5 passed through degenerate HH points, and four new HH points
appeared; only two of which are seen in the view in figure 3.5.
Figure 3.5 (d) shows the projections of the EFM surface onto the(ωs, Ns)-plane forΛ =
0.006. Note that the BT points at the ends of theH3 have merged and disapeared after passing
through Bogdanov-Takens-Hopf points and later through a degenerate BT point. In this way,
the left boundary (H2 andH4) and the right boundary (H3 andH5) of the stable EFM region
are again qualitatively the same.
In Figure 3.5 (e)–(f) we show that with a further increase ofΛ, toΛ = 0.015 the number of

76 Chapter 3. EFM stability regions
−0.05 0 0.05−0.01
0
0.01
−0.05 0 0.05−0.01
0
0.01
−0.05 0 0.05−0.01
0
0.01
−0.05 0 0.05−0.01
0
0.01
−0.05 0 0.05−0.01
0
0.01
−0.05 0 0.05−0.01
0
0.01
(e)
Λ = 0.01
H1
H2
H3H4
H5
H6
H7
(f)
Λ = 0.014
H1
H2
H3
HHH4
H5
H6
H7
(g)
Λ = 0.017
H1
H2
H3
HHH4
H5
H6
H7
(h)
Λ = 0.02
H1
H2
H3
H5
H6
H7
(i)
Λ = 0.023
H1
H5
H6
H7
(j)
Λ = 0.025
H1
ωs ωs
ωs ωs
ωs ωs
Ns Ns
Ns Ns
.
.
Figure 3.5 (continued). Projections of the EFM surface onto the(ωs, Ns)-plane, for increasing filter
width Λ as indicated in the panels; here∆1 = ∆2 = 0, κ = 0.01 anddτ = 0. Black dots indicate
codimension-two Bogdanov-Takens bifurcation points; curves and regions are coloured as in figure 3.1.
Hopf bifurcation curves that form the boundary of the EFMs stability region increases to seven.
Moreover, the number of codimension-two bifurcation points grows to six. In figure 3.5 (e) for
Λ = 0.01, we show two additional Hopf bifurcation curves,H6 andH7, that become part of the
boundary of the stable EFMs region in panel (f) forΛ = 0.014; H6 andH7 become involved

3.3. Dependence of EFM stability on∆ 77
in the boundary after they pass through a degenerate HH point. However, while the filter width
Λ continues to increase, the number of Hopf bifurcation curves forming the boundary of EFMs
stability regions decreases and the codimension-two bifurcation points gradually disappear;
see figure 3.5 (g)–(i). In figure 3.5 (g)–(i) the boundary of the EFMs stability region simplifies
in a complicated series of transitions of Hopf bifurcation curves (2)–(7).First, we find sad-
dle and minimax transitions of the Hopf surfaces in(C1p , dCp, Λ)-space, which also manifest
themselves in(ωs, Ns, Λ)-space. Furthermore, there are transitions through degenerate HH
points at which two different Hopf curves disconnect, and transitions through degenerate SH
points, at which Hopf bifurcation curves disconnect from saddle-node bifurcation curves; at a
degenerate SH point the Hopf bifurcation curve is tangent to the saddle-node bifurcation curve
[17, 36]. All the mentioned transitions lead to the region of stable EFMs extending over the
wholeωs-range; it is now bounded at the top by the saddle-node curve and at thebottom by
Hopf bifurcation curve (1); see figure 3.5 (j) forΛ = 0.025. Moreover it does not include any
codimension-two bifurcation points.
In summary, the investigation of the dependence of the EFM surface and region of stable
EFMs on the common filter widthΛ is in qualitative agreement with findings for both limit
cases,Λ → 0 andΛ → ∞. We showed that with increasingΛ, the region of stable EFMs
undergoes many complicated transformations. For sufficiently highΛ it extends over the whole
ωs-range, and is bounded at the top by the saddle-node curve and at the bottom by Hopf curve.
We analysed here only the EFM surface of the simplest typeB for ∆1 = 0 and∆2 = 0.
To analyse the dependence of EFMs stability on filter detuning∆1 and∆2 in the next
section we fix the filter width at a representative value,Λ = 0.005. Namely, the boundary of
the EFM stability region in figures 3.3 (b) and 3.4 (b) involves only five Hopf curves, and it
includes all three kinds of codimension-two bifurcation points. Moreover,from sections 2.3.1
and 2.4 we conclude that for this value ofΛ it is possible to find many different types of the
EFM surface.
3.3 Dependence of EFM stability on∆
In the two previous sections we only considered the case that the EFM surface is of the sim-
plest typeB. More specifically we analysed only EFM stability regions on the EFM surface
corresponding to the point(∆1, ∆2) = (0, 0) in the EFM surface bifurcation diagram in the
(∆1, ∆2)-plane presented in sections 2.3.4–2.4. We showed that the regions of stable EFMs
change with increasingκ andΛ, even tough the topology of the EFM surface itself remains
unaffected. In particular, we observed a splitting and separation of the stable EFM region
with increasingκ. Moreover we showed that with increasingΛ the EFM surface expands and

78 Chapter 3. EFM stability regions
boundary of the stable EFM region simplifies. These results are in agreement with our find-
ings in section 2.4, where we show that with increasingΛ the 2FOF laser approaches the COF
laser limit, which results in a diminishing influence of the filters detunings on the topology of
the EFM surface and, hence, on the stability of EFMs. Based on our findings, throughout this
section we fixκ = 0.01 andΛ = 0.005 — values that are representative for the 2FOF laser,
and for which the EFM stability region extends over the wholedCp-range; as before we keep
dτ = 0.
To analyse the dependence of the stable EFM regions on the filter detunings∆1 and∆2,
we now calculate the EFM surface with corresponding information on the EFMs stability for
several representative regions from the EFM surface bifurcation diagram in the(∆1, ∆2)-
plane. Our goal is to give an overview of changes of EFM stability regionsassociated with
the singularity transitions of the EFM surface in(ωs, dCp, Ns)-space, as were described in
sections 2.3.3 and 2.3.4.
The starting point of our considerations is the EFM surface in figure 3.3 (b), for κ =
0.01, Λ = 0.005, ∆1 = 0, ∆2 = 0 anddτ = 0; it has a single region of stable EFMs centred
around the solitary laser frequency, represented in here byωs = 0. We first fix ∆2 = 0
and increase∆1; in this way we move along the horizontal line∆2 = 0 in the EFM surface
bifurcation diagram in the(∆1, ∆2)-plane. With increasing∆1, we first observe that the kind
of connection between the 2π-periodic fundamental units of the EFM surface change. Next,
after passing the point where the curvesC andSC meet, a hole in the EFM surface appears and
its type changes fromB to Bh; a point of this kind can be found in the enlargement of the EFM
surface bifurcation diagram in the(∆1, ∆2)-plane in figure 2.20. We further increase∆1 to
a value at which, even thought the EFM surface remains unchanged of typeBh, the region of
stable EFMs splits into two stable EFM regions that extend over the whole rangeof dCp — we
refer to such a region as a ‘band of stable EFMs’. This transition is described in section 3.3.1.
Next we fix∆1 = 0.024 which is the maximum value of the first transition, and we move
vertically down in the EFM surface bifurcation diagram in the(∆1, ∆2)-plane by decreasing
∆2 to ∆2 = −0.037. Along this path we first pass through theSN -transition where a second
hole is created and the EFM surface changes to typehBh. We show that for typehBh around
each of the filter central frequencies a band of stable EFMs exists; see section 3.3.2. With a
further decrease of∆2 we pass through theSω-transition where the EFM surface splits into
two components and changes to typeBB. Interestingly, we find that theSω-transition does not
affect the qualitative structure of stable EFMs regions.
To find a new band of stable EFMs we fix∆2 = −0.037 and increase∆1 again. The third
stable EFM band around the central laser frequency is created just before we pass through the
secondSω-transition, after which the EFM surface consists of three components andits type
changes toBBB. Changes of the stable EFM regions associated with bothSω-transitions are
described in section 3.3.3.

3.3. Dependence of EFM stability on∆ 79
Finally we choose values of∆1 and∆2 at which the side components of the EFM surface
split into ‘islands’ —dCp periodic disjoint compact objects. In other words, the type of the
EFM surface changes fromBBB first into IBB and then intoIBI. The splitting of the side
components of the EFM surface results in a division of the bands of stable EFMs into ‘islands of
stable EFMs’. What is more, the stable EFM regions extend over the whole range ofdCp over
which the side island of the EFM surface exist. On the other hand, the central band of stable
EFMs around the free laser frequency expands to fill a larger area ofthe central component of
the EFM surface; see section 3.3.4.
Overall, we show that detuning the filters from the solitary laser frequencyresults in
changes of the EFM surface type, which in turn is coupled to changes of the stability struc-
ture of EFMs. From a bifurcation theory point of view, this means that the stability boundaries
of the stable EFM regions which consist of saddle-node and Hopf bifurcations curves, must
change. We show that such changes are due to minimax and saddle transitions of the saddle-
node and Hopf bifurcation surfaces in(C1p , dCp, ∆1)-space and(C1
p , dCp, ∆2)-space. In
such transition boundary curves of the EFM stability regions emerge or disappear and con-
nect differently, and this results in transformations of the stable EFM regions. Associated
codimension-two and codimension-three bifurcations points (where the boundary curves also
interact with each other) are mentioned as necessary, but their detailed discussion is beyond the
scope of the analysis presented in this section.
3.3.1 Influence of hole creation on EFM stability
For∆1 = 0 and∆2 = 0 the EFM surface consist of infinitely many compact objects connected
at the points(ωs, Ns, dCp) = (0, 0, (2n + 1)π), wheren ∈ Z. In this section we increase∆1
for fixed ∆2 = 0. The first effect of increasing∆1 from ∆1 = 0 is a change of the nature of
the connection between thedCp-periodic units of the EFM surface. A further increase of∆1
result in the transition of the EFM surface from typeB to typeBh.
Figure 3.6 (a)–(c) illustrates how a hole is created in the EFM surface due tothe saddle tran-
sitionSC ; compare figure 2.22. Figure 3.6 (a1)–(c1), shows the EFM surface in(ωs, dCp, Ns)-
space over a4π-interval ofdCp. Figure 3.6 (a2)–(c2) present enlargements of the narrow con-
nection between the fundamental units of the EFM surface. All curves andregions in figure 3.6
(a2)–(c2) are coloured as in figure 3.1. Note that for clarity panels (a1)–(c1) are shown without
the information about the stability of the EFMs. The axes ranges for all the panels can be found
in Table: 3.1.
In figure 3.6 (a), for∆1 = 0.0005, we show that the fundamental units of the EFM surface
are no longer connected at single points; instead they are connected along closed loops. The
small white curve in the middle of panel (a1) illustrates that connection. In fact, it is a small

80 Chapter 3. EFM stability regions
(a1)
∆1 = 0.0005
(a2)
(b1)
∆1 = 0.0007 (b2)
(c1)
∆1 = 0.005
(c2)
ωs
ωs
ωs
dCp/π
dCp/π
dCp/π
Ns
Ns
Ns
0
0 0
0
0
0
0 0
0
0
0
0 0
0
Ns
Ns
Ns
dCp/π
dCp/π
dCp/π
ωs
ωs
ωs
.
.
Figure 3.6. Influence of local saddle transitionSC , where two bulges connect to form a hole, on the
stability of the EFMs; here∆2 = 0, κ = 0.01, Λ = 0.005 anddτ = 0. Panels (a1)–(c1) shows
two copies of the fundamental2π-interval of the EFM surface for different values of a detuning∆1, as
indicated in the panels. Panels (a2)–(c2) show enlargements of the region where the hole is formed. In
panels (a1)–(c1) the limit of thedCp-axis corresponds to a planar section that goes through middle of
the hole in panels (a2)–(c2). For the specific axes ranges seeTable 3.1; curves and regions are coloured
as in figure 3.1.

3.3. Dependence of EFM stability on∆ 81
panel min(ωs) max(ωs) min(dCp) max(dCp) min(Ns) max(Ns)
figure 3.6 (a) -0.0250 0.0250 -3.0000 1.0000 -0.0050 0.0050
figure 3.6 (a1) -0.0050 0.0050 -1.0520 -0.9975 -0.0010 0.0010
figure 3.6 (b) -0.0250 0.0250 -3.0500 0.9800 -0.0050 0.0050
figure 3.6 (b1) -0.0048 0.0048 -1.0575 -1.0386 -0.0010 0.0010
figure 3.6 (c) -0.0230 0.0250 -3.3300 0.7100 -0.0045 0.0050
figure 3.6 (c1) 0 0.0050 0.6650 0.7460 -0.0008 0.0018
Table 3.1.Axes ranges for all the panels in figure 3.6
closed elliptical curve, which correspond to the narrow neck in the enlargement in figure 3.6
(a2) of the EFM surface in the vicinity of that curve.
Figure 3.6 (b), for∆1 = 0.0007, shows that for only a slightly higher value of∆1 a hole
in the EFM surface is created. Therefore, for some range ofdCp the EFM surface is connected
along two disjoint closed loops. This is illustrated by the two white ellipses in the middleof
panel (b1). In other words we take a constantdCp planar section through the middle of the hole
shown in panel (b2).
Figure 3.6 (c), for∆1 = 0.005, shows that increasing∆1 causes an expansion of the EFM
surface. The expansion is most substantial at the range ofdCp at which the constantdCp planar
section through the EFM surface consist of two disjoint closed loops. Notethe considerable
growth of the two closed intersection curves in comparison with panel (b1).The enlargement
in figure 3.6 (c2) shows the hole, through which the constantdCp section in panel (c1) is taken.
We again consider only a small range ofωs near the hole in the EFM surface. Note that, due to
the growth of the EFM surface and in contrast to figure 3.6 (b2), the EFM surface in panel (c2)
is not shown over its entireωs-range.
The stability information shown in figure 3.6 (a2)–(c2), clearly demonstratesthat the ap-
pearance of the hole strongly affects the stability of the EFMs. For example,a new Hopf
bifurcation curve appears in panel (a2); in panel (b2) a region of unstable EFMs emerges at the
edge of the hole; and in panel (c2) the whole structure of stable EFMs becomes more compli-
cated; compare with figure 3.3 (b) and figure 3.4 (b) which show the EFM surface with stability
information before detuning the filter,∆1 = 0.
We now explain the nature of those stability changes in more detail. Figure 3.7 (a)–(c) show
projections of the EFM surface corresponding to the EFM surfaces presented in the figure 3.6
(a)–(c). Figure 3.7 (a1)–(c1) show the projection of the EFM surfaceover a [0, 2π] range
of dCp; in this way the connection between the fundamental units of the EFM surfaceand
the hole are presented in the centre of the figure. Panels (a2)–(b2) show enlargements, near

82 Chapter 3. EFM stability regions
−0.025 0 0.025 0
1
2
−0.003 0 0.003 0.94
1.03
−0.025 0 0.025 0
1
2
−0.004 0 0.004 0.92
0.98
−0.024 0 0.026 0
1
2
0 0.005 0.45
0.85
(a1)(a2)
(b1) (b2)
(c1) (c2)
ωs ωs
ωs ωs
ωs ωs
dCp
πdCp
π
dCp
πdCp
π
dCp
πdCp
π
.
.
Figure 3.7. Projections with stability information of the EFM surface in figure 3.6 onto the(ωs, dCp)-
plane, shown for increasing filter detuning∆1 = 0.0005 (a), ∆1 = 0.0007 (b) and∆1 = 0.005 (c);
here∆2 = 0, κ = 0.01, Λ = 0.005 anddτ = 0. To illustrate the changes in the EFM surface, panels
(a1)–(c1) show the2π interval of the EFM surface that is shifted byπ with respect to the fundamental
2π interval of the EFM-surface. Panels (a2)–(c2) show enlargements of the central part of panels (a1)–
(c1). Curves and regions are coloured as in figure 3.1; dark green colour indicates that there are two
stable regions on the EFM surface that lie above one another in theNs direction.

3.3. Dependence of EFM stability on∆ 83
the connection between the two units of the EFM surface, of the region of the(ωs, dCp)-
projection of the EFM surface from Figure 3.7 (a1)–(c1). Recall that, we colour regions in
dark green where stable EFMs exist on the bottom and on the top sheet of the EFM surface. In
other words, dark green indicates areas, where for a set values ofωs anddCp, two stable EFMs
with different values of population inversionNs exist. The dark green areas can be found in the
following regions of the EFM surface: at the edge of the hole, at the outeredges of the EFM
surface, and at the narrow necks of the central component of the EFMsurface; in the vicinity of
connections between the fundamental units of the EFM surface. The othercurves and regions
in figure 3.7 are coloured as in figure 3.1.
Figure 3.7 (a), for∆1 = 0.0005, shows that with opening the connection between the
fundamental units of the EFM surface, the saddle-node curve underwent a saddle connection
and changed from a closed loop periodically translated along thedCp axis to two infinitely
long 2π-periodic curves that extend along the outer edges of the(ωs, dCp)-projection of the
EFM surface. Note that inside a substantial ‘bulge’ of the right saddle-node curve in figure 3.7
(a2), as well as along the edge of the projection of the EFMs surface, theEFM stability region
exists on both the bottom and the top sheet of the EFM surface. Additionally, inside the bulge
a new Hopf curve ends at two BT points that emerged due to an increase ofthe filter detuning
∆1.
Figure 3.7 (b), for∆1 = 0.0007, shows how the stability of the EFMs changes after the
creation of the hole in the EFM surface. Note that the hole indicates a region inthe(ωs, dCp)-
plane where EFMs do not exist and, hence, also no stable EFMs can be found. Panel (b2) shows
that, as the result of passing through a saddle point of the saddle-node bifurcation surface in
(ωs, dCp, ∆1)-space, the bulge from panel (a2) detaches and forms a new closed saddle-node
curve that surrounds the hole. As a result at the edge of the hole, a region of unstable EFMs
appears.
In figure 3.7 (c), for∆1 = 0.005, we show that increasing∆1 is associated with several
trends in changes of the EFM stability region. First, the connection betweendCp-periodic
units of the EFM surface expands in theωs direction; this results in an expansion of the EFM
stability region in theωs direction. Second, the Hopf curve around the point(ωs, dCp) = (0, 0)
in panels (a1) and (b1) shrinks and shifts away from the point(ωs, dCp) = (0, 0) in panel (c1);
this is the curve that formed the lower boundary of the regions of stable EFMs in section 3.1
and 3.2. Together with that Hopf curve the region of unstable EFMs bounded by it shrinks as
well. Finally, the hole and the region of unstable EFMs around it grows inωs as well asdCp
directions.
Note that, the growth of the hole with increasing∆1 is much slower than the expansion of
the region of unstable EFMs around it. In figure 3.7 (b) the hole is the most important change
to the stable EFM region. The situation changes in figure 3.7 (c): here the stable EFM region

84 Chapter 3. EFM stability regions
−0.02
0
0.033
−2.38−2
−1
0
11.63
−0.004
0
0.007
ωs
dCp/π
Ns
.
.
Figure 3.8. The EFM surface with stability information for filters detunings∆1 = 0.024 and∆2 = 0.
Hereκ = 0.01, Λ = 0.005 anddτ = 0; curves and regions are coloured as in figure 3.1.
is affected by the expanding region of unstable EFMs; its area is severaltimes larger than the
area of the hole. The expansion of the region of unstable EFMs is associated with a change
of its boundary. In panel (b) it is bounded by a single saddle-node curve. In figure 3.7 (c) the
boundary of the region of unstable EFMs around the hole involves the samesingle saddle-node
bifurcation curve and additionally two Hopf bifurcation curves. One of theHopf curves is the
Hopf curve from panel (b) and the second one appeared in a minimax transition of the Hopf
bifurcation surface.
We now show how, with a further increase of∆1, those trends lead to a division of the
single stable EFM region into two bands of stable EFMs. Figure 3.8, presentsEFM surfaces
in (ωs, dCp, Ns)-space over the4π-interval of dCp. All regions and curves are coloured as
in figure 3.1. (Note that thedCp-range is slightly larger then4π due to surface rendering
requirements.) In figure 3.8 we show that for∆1 = 0.024 (and∆2 = 0) the EFM surface of
type Bh has two bands of stable EFMs; one of the EFM stability bands is centred around the
solitary laser frequency and the other one around the central filter frequency (aroundωs = ∆1).
The two bands of stable EFMs are separated by the hole. There are also very small additional
regions of stable EFMs: one near the left end of the EFM surface (for negativeωs) and one at
the edge of the hole.
The splitting of the single stable EFM region into two regions of stable EFMs that form
bands expanding over the whole range ofdCp is explained in more details in figure 3.9. This

3.3. Dependence of EFM stability on∆ 85
transitions does not involve a topological change of the EFM surface itself, but of the saddle-
node and Hopf curves that bound the EFM stability regions. At such codimension-two points
the Hopf curves bounding EFM stability regions can appear, disappear or can change the way
they are connected.
More specifically, figure 3.9 (a)–(f) shows how stability regions of EFMschange with an
increase of∆1 from ∆1 = 0.065 to ∆1 = 0.024, while the second filter is fixed at∆2 = 0.
Panels (a)–(f) show projections of the EFM surface onto the(ωs, dCp)-plane over[0, 2π] dCp-
range. Changes of the structure of the EFMs stability regions are results of minimax and saddle
transitions of the Hopf curves. In effects the single region of stable EFMsin panel (a) divides
into four regions of stable EFMs in panel (f). Two of them extend over thewhole range ofdCp,
and two exist for very limited ranges ofdCp. Note that for all projections in figure 3.9 (a)–(f)
the EFM surface remains of the typeBh.
In figure 3.9 (a), we show that for∆1 = 0.0065 the closed Hopf curve, visible in the
top half of the panel shrinks significantly in comparison to the same curve for∆1 = 0.005
in figure 3.7 (c1). This closed Hopf curve disappears in a minimax transition of the Hopf
bifurcation surface, for slightly higher value of∆1; see panel (b) for∆1 = 0.0085. Note
also, that figure 3.9 (a) and (b) shows that the region of unstable EFMs surrounding the hole
continues to grow with increasing∆1.
Figure 3.9 (c) to (f) illustrate a division of the single EFM stability region into four regions
of stable EFMs. Each of the partition of the stable EFM region occurring in between panels (c)
to (f) is associated with a saddle transitions of Hopf bifurcation curves. The saddle transition
of the Hopf curves occurring in between panels (c) and (d) results in a separation of the EFM
stability region into two bands of stable EFMs, one around the solitary laser frequencyωs = 0
and another associated with the central filter frequency. Both those regions extend over the
whole range ofdCp. Next in panel (e) there is new small region of stable EFMs that lies on the
edge of the hole; this region detached from the right band of stable EFMs.Although this region
is too small to be detected in experiments, we emphasise its existence because it expands into
a stable EFM band for other values of∆1 and∆2; see section 3.3.3. Finally for∆1 = 0.024
in panel (f) a small region of stable EFMs detaches from the left stable EFMband, which
increases the total number of stable EFM regions to four. Note that, the(ωs, dCp)-projection
in figure 3.9 (f) corresponds to the EFM surface in figure 3.8.

86 Chapter 3. EFM stability regions
−0.024 0 0.026 0
1
2
−0.024 0 0.026 0
1
2
−0.023 0 0.031 0
1
2
−0.023 0 0.031 0
1
2
−0.022 0 0.032 0
1
2
−0.022 0 0.034 0
1
2
(a) (b)
(c) (d)
(e) (f)
ωs ωs
ωs ωs
ωs ωs
dCp
πdCp
π
dCp
πdCp
π
dCp
πdCp
π
.
.
Figure 3.9. Projections of the EFM surface with stability information onto the(ωs, dCp)-plane for
increasing filter detuning∆1 = 0.0065 (a), ∆1 = 0.0085 (b), ∆1 = 0.0165 (c), ∆1 = 0.0175 (d),
∆1 = 0.0215 (e) and∆1 = 0.024 (f). Here∆2 = 0, κ = 0.01, Λ = 0.005 anddτ = 0; curves and
regions are coloured as in figure 3.7.
3.3.2 Influence ofSN -transition on EFM stability
We now explore how the structure of the stable EFM regions is affected by the change of the
EFM surface from typeBh to type hBh. To reach the parameter range for which the EFM

3.3. Dependence of EFM stability on∆ 87
−0.033
0
0.033
−2.65−2
−1
0
11.41
−0.007
0
0.007
ωs
dCp/π
Ns
.
.
Figure 3.10. The EFM surface with stability information for filters detunings∆1 = 0.024 and∆2 =
−0.025. Hereκ = 0.01, Λ = 0.005 anddτ = 0; curves and regions are coloured as in figure 3.1.
surface is of typehBh we fix ∆1 = 0.024 and decrease∆2 until the second hole in the EFM
surface appears; the second hole is the result of aSN saddle transition; see figure 2.15 in sec-
tion 2.3.3. We find that for the EFM surface of typehBh two bands of stable EFMs exists. The
bands are centred around the central filter frequencies associated with∆1 and∆2. Addition-
ally, we show that at the edges of the holes, a small stable EFM region can befound. This
region is centred around the solitary laser frequency, represented here byωs = 0.
Figure 3.10, for∆1 = 0.024 and∆2 = −0.025, shows the EFM surface in(ωs, dCp, Ns)-
space over the4π-interval ofdCp. (In fact, thedCp axis range is slightly larger then4π due to
surface rendering requirements.) All regions and curves are coloured as in figure 3.1.
Figure 3.10 shows the EFM surface ofhBh type on which two ‘bands of stable EFMs’
exist; both these bands are bounded by Hopf curves. Each band is centred around the central
frequency of one of the filters. Additionally, a stable EFM region exists in thecentre of the
EFM surface at the edges of the holes. This region is bounded by Hopf and saddle-node
bifurcation curves and it is centred around the central laser frequency. We now show that
qualitatively the same structure of the EFM stability regions exists before the second hole
appears. Moreover we present the structure of the EFM stability regionsfor the transition
through the anti-diagonal∆1 = −∆2 in the EFM surface bifurcation diagram in the(∆1, ∆2)-
plane presented in figure 2.17.
Figure 3.11 (a)–(d) presents how the stability structure of the EFMs change for fixed∆1 =

88 Chapter 3. EFM stability regions
−0.026 0 0.033 1
2
3
−0.034 0 0.033 1
2
3
−0.034 0 0.033 1
2
3
−0.034 0 0.033 1
2
3
(a) (b)
(c) (d)
ωs ωs
ωs ωs
dCp
πdCp
π
dCp
πdCp
π
.
.
Figure 3.11. Projections of the EFM surface with stability information onto the(ωs, dCp)-plane for
increasing filter detunings∆2 = −0.012 (a),∆2 = −0.023 (b), ∆2 = −0.024 (c), ∆2 = −0.025 (d).
Here∆1 = 0.024, κ = 0.01, Λ = 0.005 anddτ = 0; curves and regions are coloured as in figure 3.7.
0.024 and for values of∆2 in the range∆2 ∈ [−0.012, −0.037]. In figure 3.11 (a)–(d) we show
the projection of the EFM surface onto the(ωs, dCp)-plane over the range ofdCp ∈ [π, 3π].
In figure 3.11 (a), for∆2 = −0.012, the EFM surface is still of the typeBh, the same
type as in figure 3.9 (a)–(f). There are four regions of stable EFMs in panel (a). Two bands of
stable EFMs centred at the central filter frequencies and two small EFM stability regions at the
edge of the hole relatively close to the solitary laser frequency. Each of stable EFM bands is
bounded by a pair of Hopf bifurcation curves. The boundary of the stable EFM regions at the
edge of the hole involves single Hopf curve and a single saddle-node curve.
In figure 3.11 (b), for∆2 = −0.023, a second hole appeared in the EFM surface due
to theSN -transition; the EFM surface is now of typehBh. Concurrently, a new saddle-node
bifurcation curve emerges in the minimax transition; see the small blue loop in the half-plane
whereωs < 0, in figure 3.11 (b). Note that, while the structure of the bands of stable EFMs
associated with the filters remains qualitatively unchanged, the two stable EFM regions at the
edge of the hole merge and expand; compare with figure 3.11 (a).

3.3. Dependence of EFM stability on∆ 89
Figure 3.11 (c) shows the(ωs, Ns)-projection of the EFM surface for∆1 = 0.024 and
∆2 = −0.024; that is, on the anti-diagonal∆1 = −∆2 in the EFM surface bifurcation diagram
in the (∆1, ∆2)-plane. The mirror symmetry of the figure 3.11 (c) with respect toωs = 0
is due to∆1 = −∆2; note that the two holes are connected in single points atωs = 0.
Additionally the two saddle-node curves from panel (b) merged into a singlecurve in the saddle
transition; the new saddle-node curve surrounds both holes. The central region of stable EFMs
is spread symmetrically along the edges of the holes. The symmetry of the EFM surface for
∆1 = −∆2 result in the emergence of a highly degenerated multiple Hopf bifurcation point at
the connection of the two holes; at this point the central Hopf curve intersects itself multiple
times. Decreasing∆2 to ∆2 = −0.025 results in the unfolding of the multi-Hopf point into
several Hopf-Hopf points. Moreover, together with the separation of the holes the saddle-node
bifurcation curve divides into two curves in another transition through the saddle in the saddle-
node surface in(C1p , dCp, ∆2)-space; see panel (d).
In figure 3.11 (a)–(d) we investigated how the stability structure of EFMs changes while
the EFM surface transforms from typeBh to typehBh. We showed that although the topology
of the EFM surface changes significantly the structure of the regions of stable EFMs remains
qualitatively unchanged. In figure 3.11 (a)–(d) we uncovered that there exist three main regions
of stable EFMs. Two associated with the central filter frequencies forming bands that extend
over whole range ofdCp, and one associated with the solitary laser frequency that expands
with an increasing detuning of the filters.
The structure of the EFM stability regions that emerged in figure 3.11 (a)–(d) suggests that
the EFM stability region centred around theωs = 0 in figure 3.9 (f) can be considered as the
region of stable EFMs associated with the second filter (hereωs = 0 corresponds to∆2 = 0).
Moreover, in a similar way the single region of stable EFMs in figure 3.7 can beconsidered as
the overlapping bands of stable EFMs associated with both filters.
3.3.3 Influence ofSω-transition on EFM stability
We now explore other regions of the EFM surface bifurcation diagram in the (∆1, ∆2)-plane
and investigate how the basic structure of the EFM stability regions uncovered in section 3.3.2
changes as the EFM surface undergoes twoSω-transitions. In particular we observe that, as the
EFM surface transforms from typehBh through typeBBh to typeBBB, the bands of stable
EFMs associated with the central filters frequencies remain qualitatively unchanged. What is
more, we show that, as we increase detuning of the filters,∆1 in the positive direction and∆2
in the negative direction, the expansion of the stable EFM region centred around the solitary
laser frequency progresses, and a third band of stable EFMs appears.
In figure 3.12 we present the EFM surfaces of typeshB (a), BB (b), BBh (c) andBBB
(d), together with stability information. We show that, despite the splitting of the EFMsurface

90 Chapter 3. EFM stability regions
−0.042
0
0.033
−2.9−2
−1
0
11.15−0.009
0
0.007
−0.042
0
0.033
−3.4−3
−2
−1
00.75
−0.009
0
0.007 (b)
(a)
ωs
ωs
dCp/π
dCp/π
Ns
Ns
.
.
Figure 3.12. The EFM surface with stability information for∆2 = −0.035 (a), ∆2 = −0.037 (b).
Here∆1 = 0.024, κ = 0.01, Λ = 0.005 anddτ = 0; curves and regions are coloured as in figure 3.1.
into up to three components, on each of those components at least one bandof stable EFMs
exist. Figure 3.12 (a)–(d) shows EFM surfaces in(ωs, dCp, Ns)-space over the4π-interval of
dCp. (Note that, due to surface rendering requirements, thedCp axes range in figures 3.12 (a),
(b) and (d) is slightly larger then4π.) All regions and curves are coloured as in figure 3.1.
To observe the firstSω-transition, we decrease∆2 while keeping∆1 = 0.024 fixed; this is

3.3. Dependence of EFM stability on∆ 91
−0.043
0
0.043
−2.89−2
−1
0
11.11−0.009
0
0.009
−0.043
0
0.043
−3.93−3
−2
−1
00.09−0.009
0
0.009 (d)
(c)
ωs
ωs
dCp/π
dCp/π
Ns
Ns
.
.
Figure 3.12 (continued). The EFM surface with stability information for∆1 = 0.035 (c),∆1 = 0.036
(d). Here∆2 = −0.037, κ = 0.01, Λ = 0.005 anddτ = 0; curves and regions are coloured as in
figure 3.1.
as in section 3.3.2. In figure 3.12 (a) and (b), we illustrate the effect of theSω-transition, where
the EFM surface changes from typehB to typeBB. Note that, although the topology of EFM
surface changes, the structure of the stable EFM regions remains qualitatively the same.
Panel (a), for∆2 = −0.035, presents the EFM surface of typehB with two bands of

92 Chapter 3. EFM stability regions
stable EFMs centred at the central filter frequencies and a stable EFM region at the edge of
the hole. The structure of the EFM stability region is virtually the same as in figure3.10. In
figure 3.12 (b), for∆2 = −0.037, we show that theSω-transition does not change the stable
EFM regions. Note, however that the region of stable EFMs around the central laser frequency
keeps expanding with decreasing of∆2.
We now fix∆2 = −0.037 and increase∆1; in this way, we find parameter values at which
the EFM surface of typeBBh changes to typeBBB. In figure 3.12 (c) and (d), for∆1 = 0.035
and for∆1 = 0.036, we show that with increasing∆1 the region of stable EFMs around the
central laser frequency expands further. In fact, in both panels (c)and (d), three bands of stable
EFMs exist. A further increase of∆1 to the value at which the EFM surface undergoes another
Sω transition and separates into three components does not qualitatively affect the structure of
stable EFM bands.
The expansion of the stable EFM region around the central laser frequency can be explained
by the observation that, as the detuning of the filters increases, the frequencies close to the cen-
tral laser frequency are subject to weaker feedback from the flanksof the filters transmittance
profiles. Recall that in section 3.1 we showed that the region of stable EFMsis larger for lower
values the of feedback rateκ. This observations is also in agreement with the findings in [17].
To sum up, in figure 3.12 (a)–(d) we investigated how the stability structure of EFMs
changes while the EFM surface transforms fromBh throughhBh to BB. In particular, we
showed that, although theSω-transition strongly affects the topology of the EFM surface, it
does not change the qualitative structure of the stable EFM regions. Moreover in figure 3.12
(c) and (d) we showed that detuning both filters further away from central laser frequency result
in the creation of a third band of stable EFMs.
Figure 3.13 shows details of how the region of stable EFMs around the central laser fre-
quency transforms into a band of stable EFMs. Panels (a)–(f) show that,while the EFM surface
changes fromhB intoBBB, the only significant change of the stability structure of the EFMs is
the transformation of the central region of stable EFMs into a band that extends over the whole
range ofdCp. We first further decrease∆2 in panels (a) and (b). Then we fix∆2 = −0.037
at the value from panel (b), and we increase∆1 up to∆1 = 0.036,in panels (c)–(f). Panels
(a)–(f) show the(ωs, dCp)-projection of the EFM surface over the range ofdCp ∈ [π, 3π]; all
regions and curves are coloured as in figure 3.1.
Figure 3.13 (a) shows that, with decreasing∆2, one hole from figure 3.11 (d) disappears
together with the saddle-node curve surrounding it; simultaneously the otherhole expands
substantially. Concurrently with the hole, the stable EFM region laying at its edge expands as
well. As the EFM surface transforms from typehB to typeBB, the periodically shifted loops
of the closed saddle-node curve connect in the saddle transition and transform to two infinitely
long2π periodic curves. Note that, in panel (b), with decreasing∆2 the expansion of the stable

3.3. Dependence of EFM stability on∆ 93
−0.043 0 0.033 1
2
3
−0.043 0 0.033 1
2
3
−0.043 0 0.035 1
2
3
−0.043 0 0.037 1
2
3
−0.043 0 0.041 1
2
3
−0.043 0 0.043 1
2
3
(a) (b)
(c) (d)
(e) (f)
ωs ωs
ωs ωs
ωs ωs
dCp
πdCp
π
dCp
πdCp
π
dCp
πdCp
π
.
.
Figure 3.13. Projections of the EFM surface with stability information onto the(ωs, dCp)-plane for
∆1 = 0.024, ∆2 = −0.036 (a), ∆1 = 0.024, ∆2 = −0.037 (b), ∆1 = 0.026, ∆2 = −0.037 (c),
∆1 = 0.029, ∆2 = −0.037 (d), ∆1 = 0.035, ∆2 = −0.037 (e) and∆1 = 0.036, ∆2 = −0.037 (f).
Hereκ = 0.01, Λ = 0.005 anddτ = 0; curves and regions are coloured as in figure 3.7.
EFM region aroundωs = 0 progresses. Figure 3.13 (a) and (b) show the(ωs, dCp)-projection
of the transition depicted in figure 3.12 (a) and (b).
We now fix ∆2 and start increasing∆1. Figure 3.13 (c), for∆1 = 0.026, shows the

94 Chapter 3. EFM stability regions
(ωs, dCp)-projection of the EFM surface of typeBBh. TheSN -transition is again associated
with the minimax transition of a saddle-node curve and, as before, it does not affect the qualita-
tive structure of the stable EFM regions. With a further increase of∆1 the hole and saddle-node
curve around it expands. We also observe a further growth of the stable EFM region centred at
the central laser frequency; see panel (d).
In figure 3.13 (e) we show that, after several transitions through degenerate Hopf-Hopf
bifurcation points and several transitions through saddle points of the Hopf bifurcation surface
in (ωs, dCp, ∆1)-space, infinitely many copies of the region of stable EFMs around the laser
frequency connect with themselves along thedCp-axis to form a band of stable EFMs that
extends over the whole range ofdCp. As a result, in figure 3.13 (e) three bands of stable
EFMs are present: one around the central laser frequency and one around each of the central
filter frequencies. Note that the closed saddle-node curve surrounding the hole connects, in the
saddle transition, with the saddle-node curve along the edge the EFM surface.
Finally, in figure 3.13 (f) after a furtherSω-transition, the EFM surface consist of three
disjoint components; and it is of typeBBB. Similarly to theSω-transition between figure 3.13
(a) and (b), the qualitative structure of the stable EFM regions appears tobe unaffected by this
transition. Note that in the saddle transition that accompanied theSω-transition the saddle-
node curve passing throughωs = 0 transformed into loops surrounding points(ωs, dCp) =
(0, (2n+1)π with n ∈ Z, and infinitely long2π-periodic curve along the left edge of the right-
most component of the EFM surface. Moreover, the closed saddle-node bifurcation curve in
figure 3.13 (f) is shifted byπ with respect to figure 3.1.
In this section, we showed that although theSω-transitions change the topology of the
EFM surface significantly, they do not affect the qualitative structure ofthe stable EFM re-
gions. Moreover, we showed that with increasing detuning of the filters from the solitary laser
frequency the region of stable EFMs aroundωs = 0 expands and transform into an additional
band of stable EFMs. Therefore, on each disjoint component of the EFMsurface of typeBBB
there exists one band of stable EFMs.
3.3.4 Influence ofSC-transition on EFM stability
We now show how the structure of stable EFM regions from section 3.3.3 changes with detun-
ing the filters further away from the central laser frequency. In other words, we investigate what
happens to the three bands of stable EFMs as the EFM surface undergoes theSC-transition
where its side components split intodCp-periodic islands; the EFM surface type changes from
BBB to IBI in the process.
Figure 3.14 shows the EFM surfaces in(ωs, dCp, Ns)-space together with the stability
information over the4π-interval ofdCp. In panel (a), for∆1 = 0.044 and∆2 = −0.049, the

3.3. Dependence of EFM stability on∆ 95
−0.055
0
0.055
−3.65−3
−2
−1
00.35−0.011
0
0.01
−0.055
0
0.055
−3.38−3
−2
−1
00.64
−0.011
0
0.01 (b)
(a)
ωs
ωs
dCp/π
dCp/π
Ns
Ns
.
.
Figure 3.14. The EFM surface with stability information for∆1 = 0.044 (a), ∆1 = 0.050 (b). Here
∆2 = −0.049, κ = 0.01, Λ = 0.005 anddτ = 0; curves and regions are coloured as in figure 3.1.
EFM surface is of typeIBB and in panel (b), for∆1 = 0.050 and∆2 = −0.049, it is of
typeIBI. (Note that thedCp axes range in panel (b) is slightly larger then4π due to surface
rendering requirements.) All regions and curves are coloured as in figure 3.1.
In figure 3.14 we show that, after the outer component of the EFM surfacedivides into
disjoint islands, stable EFM region still extends over the whole bottom sheet of the islands.

96 Chapter 3. EFM stability regions
−0.05 0 0.046 0
1
2
−0.051 0 0.046 0
1
2
−0.053 0 0.048 0
1
2
−0.054 0 0.054 0
1
2
(a) (b)
(c) (d)
ωs ωs
dCp
πdCp
π
ωs ωs
dCp
πdCp
π
.
.
Figure 3.15. Projections of the EFM surface with stability information onto the(ωs, dCp)-plane for
∆1 = 0.039, ∆2 = −0.041 (a), ∆1 = 0.039, ∆2 = −0.045 (b), ∆1 = 0.044, ∆2 = −0.049 (c)
and∆1 = 0.050, ∆2 = −0.049 (d). Hereκ = 0.01, Λ = 0.005 anddτ = 0; curves and regions are
coloured as in figure 3.7.
Moreover, at the narrow necks of the central component of the EFM surface the stable EFM
region extends over the bottom as well as the top sheet of the EFM surface. Similarly to the
first, the secondSC-transition has this type of local influence on the regions of stable EFMs. In
panel (b) both outer components of the EFM surface have formed islandswith the stable EFM
region extending over their whole bottom sheet. Note that the islands at negative ωs-values are
virtually unaffected by theSC-transition of the right-most component of the EFM surface.
Figure 3.15 (a)–(d) show how the EFM stability regions change with a further increase of
filters detuning. We present the EFM surface as a projection onto the(ωs, dCp)-plane over the
range ofdCp ∈ [0, 2π]; all regions and curves are coloured as in figure 3.7.
Panels (a), for∆1 = 0.039 and ∆2 = −0.041, and (b), for∆1 = 0.039 and ∆2 =
−0.045, show that, with increasing detuning of the filters, the expansion of the region of stable
EFMs continues. The Hopf bifurcation curves that bound regions of unstable EFMs in the
central component of the EFM surface shrink and disappear in a seriesof saddle and minimax

3.4. Dependence of EFM stability ondτ 97
transitions; as a consequence also the regions of unstable EFMs on the bottom sheet of the
EFM surface shrink and disappear. In figure 3.15 (c), for∆1 = 0.044 and∆2 = −0.049, the
left component of the EFM surface underwent theSC-transitions and divided into islands. In
other words, the EFMs centred around the left filter frequency exist only for a limited range of
dCp values. Nevertheless, the region of stable EFMs extends over the whole range ofdCp for
which the EFM island exist. Note that theSC-transition is accompanied by a saddle transition
of saddle-node bifurcation curves. After this transitions the boundary ofthe EFM stability
region on the island involves the closed saddle-node bifurcation curve and two Hopf bifurcation
curves. Finally, the same happens to the right component of the EFM surface in panel (d).
Note that the narrow neck of the EFM surface’s central component in figure 3.15 (d) is
shifted almost byπ with respect to figure 3.7 (a). This is an effect of thearctan in Eq. (2.4)
approaching the value±π/2 with increasing∆1 and decreasing∆2. The change in the phase
of thecos terms in Eq. (2.5) results in a shift fromπ to 0 of the value at which the destructive
interference occur.
To conclude, in section 3.3 we found that for two feedback loops of equallength,dτ = 0
and for suitable, and experimentally accessible values of the feedback rate κ = 0.01 and the
filter width Λ = 0.005, stable EFM regions have the following structure. There exist two bands
of stable EFMs that are centred around the central filter frequencies. These bands of stable
EFMs overlap each other for low values of the detunings of filters and, hence, are effectively
indistinguishable. The structure of the stable EFM bands unfolds with the increasing detuning
of the filters away from the central laser frequency. After the bands are separated, the qualitative
structure of stable EFM regions remains unaffected by theSN andSω transitions of the EFM
surface. With a further increase of the filters detuning, the bands of stable EFMs associated
with the central filters frequencies split into islands, concurrently with the outer components
of the EFM surface; this happens atSC-transitions and then the islands and the EFM stability
regions disappear with them inM -transitions. A third significant region of stable EFMs is
centred around solitary laser frequency. The size of this region increases with the detuning of
the filters, and for sufficiently large filter detunings a third stable EFM band iscreated. This
band of stable EFMs exist even after the side components of the EFM surface disappear in the
M -transition.
3.4 Dependence of EFM stability ondτ
So far in this chapter we discussed the stability of EFMs only for the case of the 2FOF laser
with equal delay times, that is, fordτ = 0. In this section we study how the regions of stable
EFMs change with increasing differencedτ = τ2−τ1 between the two delay times. This is the

98 Chapter 3. EFM stability regions
final part of our analysis of the dependence of EFM stability regions on the filter and feedback
loop parameters.
In section 2.5 we explained in detail that changingdτ causes a shearing of the EFM surface
in (ωs, dCp, Ns)-space along thedCP -axis, with respect to the invariant plane defined by
ωs = 0. What is more, we showed that the shearing and the other changes of the geometry
and topology of the EFM surface are independent of each other. In other words, to uncover the
EFM surface for the case of the 2FOF laser with two different delay times, itis sufficient to
find the respective EFM surface fordτ = 0, and shear with thedτ shear rate.
Shearing of the EFM surface substantially changes the structure of the intervals of stable
EFMs that one finds for the fixeddCp. However, similarly to the case of the EFM surface
itself, the overall structure of the EFM stability regions in the(ωs, dCp)-plane can effectively
be determined by finding the EFM stability regions fordτ = 0 and shearing them.
As a concrete example, we now analyse how the EFM stability regions on the simplest EFM
surface of typeB change as we increasedτ . To this end, we fixτ1 = 500 and by changingτ2 in
the interval[506, 750] we increase difference between the delay times todτ = 250. Throughout
this section we fix the other filter parameters at the values corresponding to the EFM surface
in figure 3.1 (a), that is, toκ = 0.01, Λ = 0.015, and∆1 = ∆2 = 0. In particular, we show
that even for the simplest EFM surface of typeB, the shearing of the EFM surface results in
the possibility of finding an arbitrary number of bands of stable EFMs in the(ωs, dCp)-plane.
Figure 3.16 shows projections of the EFM surface with stability information ontothe
(ωs, dCp)-plane for increasingdτ . All curves and regions are coloured as in figure 3.7. Addi-
tionally, black dots indicate codimension-two Bogdanov-Takens bifurcationpoints. Figure 3.16
(a)–(d) shows that the stable EFM region is sheared concurrently with theEFM surface. In pan-
els (a) and (b), fordτ = 6 anddτ = 14, we show that initially the EFM stability region changes
rather subtly. In figure 3.16 (c), fordτ = 62, the basic unit of the EFM surface starts to extent
over the 2π dCp-range. Hence, for somedCp-range, two stable EFM intervals separated by
interval with no EFMs exist; for example two such intervals exist fordCp/π = 0.85. Each
of those intervals belongs to a different 2π-translated copy of the basic EFM surface unit. In
panel (d), fordτ = 62, the EFM surface is sheared so much that parts of four 2π-translated
copies of the basic EFM surface unit can be seen over the the 2π dCp-interval. As a result, for
example fordCp/π = 0.5, indicates four intervals of stable EFMs exist. Those stable EFM
intervals are separated by intervals with no EFMs as well as by intervals of unstable EFMs.
Additionally, the shearing of the stable EFM regions with increasingdτ is associated with
minor topological changes of their outer boundary. In figure 3.16 (a), similarly to figure 3.1 (a),
the outer boundary involves six Hopf bifurcation curves and a single saddle-node bifurcation
curve. However, due to the shearing the structure of this outer boundary changes. Note that,
in the bottom right corner of figure 3.16 (a), the boundary involves only two Hopf bifurcation

3.4. Dependence of EFM stability ondτ 99
−0.04 0 0.04 0
1
2
−0.04 0 0.04 0
1
2
−0.04 0 0.04 0
1
2
−0.04 0 0.04 0
1
2
(a) (b)
(c) (d)
ωs ωs
ωs ωs
dCp
πdCp
π
dCp
πdCp
π
.
.
Figure 3.16. Projections of the EFM surface with stability information onto the(ωs, dCp)-plane for
increasing delay time in the second feedback loopτ2 = 506 (a), τ2 = 514 (b), τ2 = 562 (c) and
τ2 = 750 (d); hereτ1 = 500, κ = 0.01, Λ = 0.015 and ∆1 = ∆2 = 0. Black dots indicate
codimension-two Bogdanov-Takens bifurcation points; curves and regions are coloured as in figure 3.7.
curves; the third Hopf curve is no longer involved in the boundary after itpassed through the
Hopf-Hopf point; compare with figure 3.1 (a).
In figure 3.16 (b), we show that, as the shearing of the stable EFM region progresses, four
BT bifurcation points appear on the saddle-node curve. As those BT bifurcation points move
along the saddle-node curve with increasingdτ , the overall structure of the outer boundary of
the stable EFM region simplifies. In panel (c), a new Hopf bifurcation curve emerged from the
point (ωs, dCp) = (0, 1), when the saddle-node curve passed through a tangency with the line
dCp = 1. Additionally, after passing through a saddle point on the saddle-node bifurcation
surface in(ωs, dCp, dτ)-space, the saddle-node curve changed from a closed loop into two
infinitely long curves. In panel (d), fordτ = 250, the boundary of the EFM stability regions
involves only Hopf curves and is more complicated than in panel (c). Note that the inner
boundary of the EFM stability region is always formed by the closed elliptical Hopf curve
surrounding the points(ωs, dCp) = (0, 2nπ) with n ∈ Z.

100 Chapter 3. EFM stability regions
Overall we conclude that the main effect of varyingdτ is the shearing of the EFM stability
regions that can be found fordτ = 0. Additionally, the shearing and the other transformations
of the EFM stability regions — presented in sections 3.1–3.3 — are independent of each other.
In other words, all previous cases of the EFM stability regions fordτ = 0 can be sheared
similarly. As a result of the shearing, even for the EFM surface of the simplest type B, any
number of stable EFM intervals, for fixeddCp can be obtained for sufficiently largedτ , such
stable EFM intervals are separated by intervals where no EFMs exist at all.
3.5 Different types of bifurcating oscillations
The existence of different kinds of intensity oscillations in lasers with opticalfeedback is well
documented; extensive theoretical as well as experimental studies of this subject can be found,
for example in [48, 24, 22, 18]. As in the FOF laser, in the 2FOF system two main types of
oscillations bifurcate from Hopf bifurcation points: relaxation oscillations (ROs), which are
common in semiconductor lasers subject to external perturbation, and frequency oscillations
(FO) which are typical for semiconductor lasers subject to filtered opticalfeedback.
ROs are characterised by a periodic exchange of energy between the optical fieldE and the
population inversionN , which result in oscillations of the laser intensity and (for non-zeroα)
of the laser frequency; a typical RO frequency has a value of several GHz [19]. In FOs, on the
other hand, the laser frequency oscillates with a high amplitude at a frequency on the order of
the external round trip time1/τ , while the intensity of the laser remains almost constant [17,
18]. This is unexpected in a semiconductor laser, in light of strong amplitude-phase coupling
via the linewidth enhancement parameterα [18, 23]. The different mechanisms behind ROs
and FOs manifest themselves in the different time scales of the two kinds of oscillations: the
fast RO arises due to fast processes inside the semiconductor laser, and the slow FO arise due
to interaction of the semiconductor laser with light travelling in the external filtered feedback
loops; time light travels in external loops is orders of magnitude larger then thetimescale of
the processes inside the laser.
Considering that the existence of ROs and FOs in the single FOF laser has been studied
theoretically and confirmed experimentally [17, 19], we expect to find both ROs as well as
FOs in the 2FOF laser. From a bifurcation theory point of view, both types of oscillations are
periodic orbits that originate from Hopf bifurcations [38, 42]. We foundmany Hopf bifurcation
curves in sections 3.1–3.4, from which periodic solution bifurcate. We nowdiscuss which of
those Hopf bifurcations in the(ωs, dCp)-plane give rise to ROs and which to FOs; in this way,
we determine where in the(ωs, dCp)-plane one can expect to find ROs and FOs.
To analyse periodic orbits emanating from Hopf bifurcation points we use again numerical
continuation. We continue the bifurcating periodic solutions with DDE-BIFTOOL [11]. Note

3.5. Different types of bifurcating oscillations 101
0 5 10 15 20 251.7
1.9
2.1
0 100 200 300 400 5001.7
1.9
2.1
0 5 10 15 20 25−2.5
0
2.5
0 100 200 300 400 500−2.5
0
2.5
0 5 10 15 20 251.4
1.9
0 100 200 300 400 5001.4
1.9
0 5 10 15 20 25−2.5
0
2.5
0 100 200 300 400 500−2.5
0
2.5
0 5 10 15 20 251.4
1.9
0 100 200 300 400 5001.4
1.9
0 5 10 15 20 25−2.5
0
2.5
0 100 200 300 400 500−2.5
0
2.5
(a1)
(a2)
(a3)
(a4)
(a5)
(a6)
(b1)
(b2)
(b3)
(b4)
(b5)
(b6)
t t
t t
t t
t t
t t
t t
φF2 φF2
IF2 IF2
φF1 φF1
IF1 IF1
φL φL
IL IL
.
.
Figure 3.17. Example of relaxation oscillations (a) and frequency oscillations (b) found in the EFM
stability diagram in figure 3.7 (c); for∆1 = 0.005, ∆2 = 0, κ = 0.01, Λ = 0.005 anddτ = 0. RO are
found at(ωs, dCp/π) = (0.0035, 1.828), and FO at(ωs, dCp/π) = (0.0031, 0.802). The different
rows show from top to bottom: the intensityIL and the frequencyφL = dφL/dt of the laser field, the
intensityIF1 and the frequencyφF1 = dφF1/dt of the first filter field, and the intensityIF2 and the
frequencyφF2 = dφF2/dt of the second filter field. Note the different time scales for ROs and FOs.
that, the numerical continuation with calculation of stability information for periodicorbits is
computationally much more expensive than the respective calculations for EFMs (which are
steady states). This is why a complete analysis of bifurcating oscillations and their stability
regions is beyond the scope of this work. Rather we show, by continuation of particular bifur-
cating periodic orbits, where generally ROs and FOs can be found for the2FOF laser.
As a starting point, we now investigate the types of periodic solutions bifurcating from
the different types of Hopf bifurcation curves in figure 3.7 (c); for∆1 = 0.005, ∆2 = 0,
κ = 0.01, Λ = 0.005 anddτ = 0. We start our analysis with this case, because beside the
Hopf bifurcation curves that emerged with the appearance of the hole, theboundary of the EFM
stability region in figure 3.7 (c) still includes all the Hopf bifurcation curves that one can find
for the 2FOF laser with two identical filters with equal delay times. To determine what kind

102 Chapter 3. EFM stability regions
of periodic solutions emanate from the Hopf bifurcation curves in figure 3.7(c), we analyse
frequencies and amplitudes of the periodic solutions that bifurcate from them; at each Hopf
bifurcation curve we start a sufficient number of continuations to be able todetermine the type
of oscillations that bifurcate from it.
Figure 3.17 shows example of ROs (a) and of FOs (b) that can be found for suitable
(ωs, dCp) in figure 3.7 (c); the ROs are for point(ωs, dCp/π) = (0.0035, 1.828), and the
FOs for(ωs, dCp/π) = (0.0031, 0.802). Note that the ROs and FOs exist for the sameωs-
range, but for differentdCp. In respective column of figure 3.17 we show, from top to bottom,
time series of the laser intensityIL, of the laser frequencyφL = dφL/dt, of the first filter
intensityIF1, of the first filter frequencyφF1 = dφF1/dt, of the second filter intensityIF2,
and of the second filter frequencyφF2 = dφF2/dt. Note the difference in time scales between
columns (a) and (b).
In figure 3.17 (a) we show typical ROs: both the laser intensityIL (a1) and the laser
frequencyφL (a2) oscillate at a frequency of 4.2 GHz. At the same time, both filter fields
hardly show any dynamics — the amplitudes of oscillation of the filter fields (a3)–(a6) are at
least one order of magnitude smaller then the amplitude of oscillations of the laserfield. The
fact that the filter fields are practically not involved in the oscillations is consistent with the
general observations that ROs are typical for semiconductor lasers withany type of feedback.
It appears that the role of the feedback loops is merely to decrease the losses, which exicites
the ROs that already exist in damped form in the free-running semiconductor laser.
In figure 3.17 (b) we show an example of the FOs. Here, the laser frequency φL (b2)
oscillates with an amplitude comparable to the oscillations of the laser frequencyφL in the case
of ROs (a2). However, the laser intensityIL (b1) is practically constant — it oscillates with
an amplitude that is two orders of magnitude smaller than the amplitude for ROs in panel (a1).
Moreover, in contrast to ROs both filter fields (b3)–(b6) oscillate with significant amplitudes.
Frequency of the FOs is on the order of1/τ . Note that both filter intensitiesIF1 (b3) and
IF2 (b5) oscillate in antiphase with each other. Moreover, the laser frequencyφL (b2) is in
antiphase with the oscillations of both filter frequenciesφF1 (b4) andφF2 (b6). This shows
that for the 2FOF laser both filter fields are generally involved in FOs.
The boundary of the EFM stability region in figure 3.7 (c) involves seven Hopf bifurcation
curves: one is located in the centre of the upper half, slightly to the left fromωs = 0, two
surround the hole and four form the outer boundary. Most of those Hopf bifurcation curves
give rise to the FOs. In fact, the only Hopf bifurcation curve at which the ROs excite is the
closed Hopf bifurcation curve located in the centre of the upper half of figure 3.7 (c1).
We analysed the Hopf bifurcation curves from figure 3.1 (a), figure 3.3(b) and (d), fig-
ure 3.12 (a) and (c), figure 3.14 (b) and figure 3.16 (d) as well. This allows us to conclude that

3.5. Different types of bifurcating oscillations 103
FOs bifurcate from most of the Hopf bifurcation curves shown in the figures in sections 3.1–
3.4. Similarly to other laser systems with optical feedback, ROs only appear around the solitary
laser frequency — in our case represented byωs = 0 — and only for sufficiently low levels
of the population inversionNs. In particular this fact can be observed in section 3.1, where
we consider the dependence of the EFM stability regions on the common feedback rateκ. In
section 3.1 in figure 3.1 thedCp-periodic copies of RO Hopf bifurcation curves surround the
points(ωs, dCp) = (0, 2n)π with n ∈ Z, and they form the lower boundary of the EFM sta-
bility region in the(ωs, Ns)-projections; see figure 3.1 (a2)–(c2). Note that all the other Hopf
bifurcation curves give rise to FOs. The RO Hopf bifurcation curve onlyappears as a closed
curve in the middle of the EFM stability region for sufficiently largeκ; see figure 3.1 (a3).
Furthermore, the expansion of the RO Hopf bifurcation curve with increasing κ results in the
growth of the region where ROs exists. These observations agree generally with findings for
ROs in other laser systems with optical feedback [17, 22, 38].
To explain how the regions of existence of different periodic solutions depend onΛ we now
consider the Hopf bifurcation curves presented in figures 3.3 and 3.4 in section 3.2. Similarly
to figure 3.1 (a3)–(c3), thedCp-periodic copies of RO Hopf bifurcation curves in figure 3.4
(a)–(d) surround the points(ωs, dCp) = (0, 2nπ) with n ∈ Z; these curves form the lower
boundary of the EFM stability region in the(ωs, Ns)-projections in figure 3.3 (a2)–(d2). All
the other Hopf bifurcation curves give rise to FOs. With increasingΛ, all the Hopf bifurcation
curves that give rise to the FOs gradually disappear; details are described in section 3.2. The
single Hopf bifurcation curve in figure 3.3 (c) and (d) is the one at which ROs bifurcate. This
means that for sufficiently highΛ no FOs exist in the 2FOF system. This result is in good
agreement with the observation that, as theΛ → ∞, the 2FOF laser reduces to the COF laser,
where one does not observe FO [5, 29, 31].
We now explain, with help of figures from section 3.3, that with increasing modulus of
∆1 and∆2 the RO Hopf bifurcation curve disappears. As for the case of the 2FOF laser with
two identical filters with equal delay times presented in sections 3.1 and 3.2, forlow values of
filter detuning∆1, as in figure 3.7 (a) and (b), thedCp-periodic copies of RO Hopf bifurcation
curves surround the points(ωs, dCp) = (0, 2nπ) with n ∈ Z. With increasing∆1, this
RO Hopf bifurcation curve shrinks and shifts away from the points(ωs, dCp) = (0, 2nπ) with
n ∈ Z. In figure 3.7 (c1), for∆1 = 0.005, only one copy of the whole RO Hopf curve is visible
and it is located in the upper half of the(ωs, dCp)-plane. As the result of a further increase
of ∆1, the RO Hopf bifurcation curve disappears. All remaining Hopf bifurcation curves give
rise to FOs; see figure 3.9 (a) and (b). What is more, we checked that allperiodic solutions
emanating from all the Hopf bifurcation curves involved in EFM stability regionboundaries in
figures 3.8–3.15 are FOs.
To summarise, we found that for moderate values ofκ andΛ and filter detunings∆1 and
∆2 of sufficiently large modulus all periodic solutions emanating from the Hopf bifurcation

104 Chapter 3. EFM stability regions
curves bounding EFM stability regions are FOs. In contrast, ROs bifurcate from the closed
Hopf bifurcation curve that exist only if the solitary laser frequency is subject to sufficiently
high feedback from the centre of the filter profile.

Chapter 4
Overall summary
Research presented in this thesis was motivated by the application of an 2FOFlaser as a pump
laser for optical communication systems. Since in such applications the main concern is sta-
ble operation of the laser source, in our analysis we focused on structure and stability of the
external filtered modes (EFMs). The EFMs are solutions of Eqs. (1.1)–(1.4) which physi-
cally correspond to constant-intensity monochromatic laser operation. We first investigated
the structure of the EFMs; in other words, we determined how the regions ofexistence of the
EFMs depend on the parameters of the 2FOF laser. We then used the uncovered structure of
the EFMs as a guideline for the analysis of their stability. What is more, we wereable to relate
changes of the EFM stability with changes of the EFM structure. Finally, we briefly studied
the types of periodic solutions bifurcating from the boundaries of the EFM stability regions.
We now present an overall summary of our work and discuss the possibilityof an experimental
confirmation of our results.
The well established way of analysing the structure of the solutions of the single FOF
laser is the investigation of EFM components — closed curves that are loci ofEFMs in the
(ωs, Ns)-plane. EFMs trace an EFM component with a changing phase of the feedback field.
The relevance of EFM components is that they show how many disjointωs frequency ranges are
available for stable laser operation. In contrast to the single FOF laser, where one can observe
at most two EFM components, we showed that, due to the transcendental nature of Eq.(2.9)
— the envelope of Eq.(2.3) for frequenciesωs of the EFMs — in the 2FOF laser system it
is possible to observe an arbitrary number of EFM components. Moreover, the analysis of
Eq.(2.9) showed that the number of EFM components in the 2FOF laser depends strongly on
the parameterdCp — the difference between the feedback phases of the two filtered fields.
Therefore, in chapter 2 we introduced the EFM surface in(ωs, dCp, Ns)-space, as a natural
generalization of an EFM component for the 2FOF laser. This provided a useful framework
for the analysis of the dependence of structure and stability of EFMs on the2FOF laser’s two
feedback loops and their filter parameters. Similarly to EFM components, the EFM surface
105

106 Chapter 4. Overall summary
provides information on how the structure of solutions depend on the phaserelations of the
filtered fields. Note that the feedback phase depends on subwavelengthchanges of the length
of the feedback loops and, hence, it is very difficult to control in real-life implementations.
Therefore, the feedback phase is the key parameter of interest in analysis of EFMs.
By considering the structure of Eq. (2.9) we found out that the dependence of the EFM
surface on the filter detunings∆1 and∆2 and the common filter widthΛ can be analysed
separately from its dependence on the differencedτ between the delay times. Therefore, we
first explored topological changes of the EFM surface with the former filter parameters. To this
end, we employed singularity theory; in particular, we distinguished five different mechanisms
through which the EFM surface can change locally: four singularity transitions and a cubic
tangency of the EFM surface with respect to a planedCp = const. What is more, we used
loci of those transitions in the(∆1, ∆2)-plane to compute, by numerical continuation, the
EFM surface bifurcation diagrams in the(∆1, ∆2)-plane. We then analysed, how this diagram
depends on change of the common filter widthΛ. This allowed us to present a complete
classification of all possible types of the EFM surface for the case of equal feedback rates
κ = κ1 = κ2. Furthermore, we used a stereographic change of coordinates to compactify the
EFM surface bifurcation diagrams in the(∆1, ∆2)-plane to analyse different ways in which
the 2FOF laser can be reduced in a nontrivial way to the single FOF laser and to the COF
laser. Finally, we showed that a nonzero differencedτ 6= 0 between the delay times causes a
shearing of the EFM surface along thedCp-axis; the topological structure of the single instance
of the EFM surface is preserved under this transformation. It is due to thisshearing of the
EFM surface that one can find an arbitrary number of the EFM componentsin the 2FOF laser;
for dτ = 0 there are at most three EFM components: one exist always around solitary laser
frequency, and the other two can appear around the filter central frequencies.
The findings presented in chapter 2 also show that the 2FOF laser is a modelsystem, which
can be used to connect different kinds of laser systems subject to optical feedback. In particular,
for Λ → ∞ the 2FOF laser reduces to the 2COF laser. It is also possible to increase thewidth of
only one of the filters, and this will result in a system with FOF and COF branches.Moreover,
by setting∆1 = ∆2 or by shifting one of the filter central frequencies∆i to infinity the
system reduces further to the FOF laser or to the COF laser, respectively. On the other hand,
for nonzerodτ one can investigate the transition between a laser subject to feedback froma
minimum of filter profile (as in [64]) and a laser subject to feedback from a filter maximum, as
here.
In chapter 3 we analysed the stability of the EFMs. We first investigated how the stability
of the EFMs depends on the common feedback rateκ and the common filter widthΛ. We next
examined how it is affected by the geometrical and topological transitions of the EFM surface
when the filter detunings∆1 and∆2 are changed. Finally, we showed that, similarly to the
EFM surface, changingdτ results in shearing of the EFM stability regions. Analogously, to

4.1. Physical relevance of findings 107
other laser system subject to optical feedback, stable EFMs of the 2FOF laser become unstable
in Hopf bifurcations; from those Hopf bifurcation two kinds of stable periodic solutions may
arise: the well-known relaxation oscillations, and frequency oscillations which are typical for
lasers with filtered feedback.
In the next section we discuss our findings from chapter 3, in conjunctionwith predictions
concerning outcomes of possible experiments with the 2FOF laser.
4.1 Physical relevance of findings
Detailed experimental studies of how the dynamics of a semiconductor laser depend on feed-
back parameters are very challenging. Nevertheless, multiparameter experimental studies of
the dynamics of the single FOF lasers were performed successfully [22, 23]. What is more, due
to advance in experimental techniques it is possible today to compare theoretical and experi-
mental two-parameter bifurcation diagrams of laser systems; see for example[48, 65, 71]. Even
though those state-of-the-art studies concern lasers with an optical injection, similar methods
might be used to analyse the 2FOF lasers.
In this section, we first discuss how the different parameters of the 2FOFlasers may be
changed in an experiment. Next, we present what features of the EFM structure presented
in Chapters.2 and 3 may be most promising to verify experimentally. Finally, we show two
examples that demonstrate the high degree of multistability in the 2FOF laser.
4.1.1 Experimental techniques for the control of parameters
The 2FOF laser can be realized in experiments either by means of optical fibres with embedded
fiber Bragg gratings or by two open air (unidirectional) feedback loops withFabry-Pérot filters;
see figure 1.1. In both setups, most of the 2FOF laser parameters can be controlled in a very
precise way. In particular, all the filter and feedback loop parameters that are analysed in this
thesis, are directly accessible and can be set for an experiment. Some of the parameters, such as
the feedback phasesC1p andC2
p or feedback rateκ, can be modified almost continuously during
measurements. However, to control some of the other parameters it is necessary to modify the
experimental setup. For example, to change the filter widthΛ or the filter detunings∆1, and
∆2 it may be necessary to introduce filtering elements with different characteristics.
To explore the EFM surface experimentally — the main object of our studies — itis nec-
essary to control the feedback phases in both feedback loops. In previous experiments with
the FOF laser and the COF laser two methods of controlling the feedback phase were used. In
[19] the feedback phase is controlled by changing the length of feedback loop on the optical

108 Chapter 4. Overall summary
wavelength scale (nanometres) with a piezo actuator, and in [30] it is controlled by changing
the laser pump current, which results in shifting the solitary laser frequency; note that [30]
concerns the COF laser.
It is important to realize that for the 2FOF laser any changes of the solitary laser frequency
affects simultaneously not only both feedback phasesC1p andC2
p but, more importantly, also
both filter detunings. In other words, scanning through the solitary laser frequency concurrently
changes the EFM-components and positions of EFMs on them; for each value of the solitary
laser frequency one observes a new set of EFMs that is given by instantaneous filter detunings
and instantaneous feedback phases that change simultaneously in both feedback loops. There-
fore, to vary the feedback phasesC1p andC2
p in the 2FOF laser it would be more practical to
use piezo actuators. Similarly, in an experimental setup with optical fibres the parametersC1p
andC2p can be controlled via thermal expansion of glass. The fibre temperature ofa section
of an optical fibre can be controlled either by immersing it in a water bath, or bylocally heat-
ing an optical fibre with a resistance wire heater. Note that to changedCp continuously in an
experiment it is enough to control one of the feedback phases, eitherC1p or C2
p .
The other parameters of the 2FOF laser can be changed in the following way: the feedback
rateκ can be controlled with a variable attenuator and a half-wave plateλ/2 [19], or by a
neutral density filter [23]; the filter widthΛ and the filter detuning∆1 and∆2 can be changed
by using different Fabry-Pérot resonators with different distancesbetween their mirrors [22];
or by exploiting strain and temperature sensitivity of fibre Bragg gratings to control location of
maximum and width of its reflection profile [66]. Finally, changing the feedback loop lengths
directly changes the delay timesτ1 andτ2, and in consequencedτ .
4.1.2 Expected experimental results
In experimental studies of a semiconductor laser with feedback one observes only stable cw-
solutions. Therefore, the stability analysis presented in chapter 3 allows usto make some
qualitative predictions about possible experimental results. Generally, weshowed there that
the core of the structure of the EFM stability regions, is formed by the two stableEFM bands
centred around the filters central frequencies. More importantly, we uncovered that those two
bands of stable EFMs appear to be quite robust against a wide range of parameter changes.
In other words, we showed that for large, experimentally relevant parameters ranges, multiple
regions of stable EFMs exist in the 2FOF laser system. Note that, since similarly tothe EFM
components, the large part of the EFM surface consists of unstable EFMs, the structure of the
EFM surface can only be checked indirectly. Nevertheless, although theunstable EFMs cannot
be observed directly in an experiment, it has been shown that they may play avery important
role in shaping the overall dynamics of the laser output [25, 30, 54, 55, 58].

4.1. Physical relevance of findings 109
We now list the features of the CW-states and of the basic periodic solutions of the 2FOF
laser that are most likely to be observe in an experiment; we base our predictions on findings
presented in this thesis and on experimental results for the FOF laser.
A first experimental test of the results from chapter 3 could be a confirmation of the de-
structive interference between the two filter fields. Recall that, for the two identical feedback
loops with equal delay times, the feedback fields cancel each other fordCp = (2n + 1)π with
n ∈ Z. Therefore, for different values ofdCp, and a fixed value ofκ, one should be able to
obtain for the 2FOF laser results as in [22], which illustrate the dependenceof the EFMs of
the single FOF laser on the feedback strength. In other words, one should be able to show
experimentally that the 2FOF laser can be reduced, in a non-trivial way to the single FOF laser
with effective feedback rate controlled bydCp; see section 2.1.2.
A main feature of the stability figures in chapter 3 are bands of stable EFMs centred around
the filter central frequencies. In such a band, stable EFMs exist only for some specific values
of the feedback phasesC1p andC2
p . Therefore, due to fact thatdCp depends on both feedback
phasesC1p andC2
p , each of the stable EFM bands on the EFM surface have to be considered
separately. In particular, to follow a stable EFM on a specific band, one has to fix feedback
phase in the feedback loop associated with this band, and change thedCp by means of the
feedback phase in the other feedback loop. The stable EFMs manifest themselves in an ex-
periment as plateaus of the feedback intensity (different feedback intensities imply different
frequencies of the laser light); see [19, Fig. 3]. Therefore, to confirm the existence of stable
EFM bands, it is first necessary to set the parameters of the experimentalsetup, in such way
that the laser is locked to one of the stable EFMs; then, it can be shown experimentally that
such an EFM exists over several 2π cycles of changingdCp and one is indeed dealing with a
stable EFM band. On the other hand, if the existence of the EFM is limited to some finite range
of the parameterdCp, then one can say that the measured EFM exists on an island of stable
EFMs. Note that, due to the periodic nature of the edges of stable EFM regions, it might be
difficult to distinguish between a narrow stable EFM band and a large stable EFM island.
By combining all the informations about the existence of stable EFM bands andislands,
one might be able to reconstruct the main features of the EFM stability structureas presented in
the chapter 3. More specifically, one should be able to distinguish between the EFM stability
structure involving two wide stable EFM bands as in figures 3.10–3.13; the EFM stability
structure consisting of three stable EFM bands as in figure 3.15 (b); and the EFM stability
structure consisting of combination of stable EFM bands and islands as in figure 3.14 and
figure 3.15 (c) and (d). Furthermore, cases in which the stability structurefrom chapter 3 is
closely aligned with the EFM surface, allow for indirect confirmation of the classification of
the EFM surface into different types presented in chapter 2; an example of such an alignment
is figure 3.14.

110 Chapter 4. Overall summary
Finally, one may also investigate existence of bifurcating FOs and ROs for different pa-
rameter values. A strong confirmation of our results would be to demonstrate the absence of
ROs for moderate values of the common feedback rateκ and the common filter widthΛ and
the filter detunings∆1 and∆2 of sufficiently large modulus; see section 3.5.
4.1.3 Existence of multistability
A next step, which is a necessary to fully describe stability of the EFMs, is theinvestigation
how many stable EFMs coexist for fixed parameters; i.e. for givenC1p andC2
p . Similarly to
the single FOF laser [17, 31], also in the 2FOF laser one can expect to findmultistability for
chosen fixed parameters, that is, including fixed feedback phasesC1p andC2
p . To confirm this
hypothesis, we first show that the total number of coexisting EFMs depends on the parameters
C1p anddCp. We then analyse the stability of individual EFMs, computed for two different sets
of fixed parameters.
Figure 4.1 shows regions in the(C1p , dCp)-plane in which different numbers of EFMs ex-
ist simultaneously; this figure is for∆1 = 0.050, ∆2 = −0.049, κ = 0.01, Λ = 0.005 and
dτ = 0, and the corresponding EFM surface of typeIBI is shown in figure 3.14 (b). Bound-
aries between the regions in figure 4.1 are given by saddle-node bifurcation curves (blue).
Figure 4.1 (a) shows the regions with different numbers of coexisting EFMs over a fundamen-
tal 2π-interval of C1p . The labelling of the regions provides not only information about the
number of EFMs on each EFM component, but also about the number of EFMcomponents
and their relative positions. To emphasize the connection between EFM components and the
EFM surface, we structured the labels in figure 4.1 (a) to be similar to the labelsfor the types
of the EFM surface. More specifically, the hat over a number indicates thenumber of EFMs on
the EFM component centred around the solitary laser frequency. Furthermore, the the numbers
without hats indicate the number of the EFMs on the EFM components centred around the
filter central frequencies; the total number of EFMs for a given parameter values is simply the
sum of numbers of a region label. Note that, the positions of the numbers withouthats indicate
locations of the other EFM components with respect to the central one. In other words, once
the EFM surface is known, it is possible to encode its structure in labels of theregions in the
(C1p , dCp)-plane.
A single EFM, in regions labelled1, corresponds to the solitary laser solution. The total
number of the EFMs on the central EFM component is always odd and new EFMs are formed
in pairs on saddle-node bifurcations curves [31, 38]. We can expectmultistability in all regions
in figure 4.1 (a) with more then one EFM. However, the best regions to look for a high degree
of multistability are the two small regions labelled2 + 1 + 2 and2 + 3 + 2. For the parameter
values in those regions, EFMs exist concurrently on all three EFM components; in the other
regions, EFMs exist at most on two EFM components. Note that, by considering dCp as a

4.1. Physical relevance of findings 111
0 1 20
1
2
−5 −4 −3 −2 −1 0 1 20
1
2
2 + b1
2 + b12 + b1
2 + b1
2 + b1 + 2
b1b1
b1 b1
b1
2 + b3
@@2 + b3
@@2 + b3
2 + b3 + 2
2 + b5
2 + b5
b3
b3
b3
b3 + 2
b5b5
b1 + 2
b1 + 2(a)
(b)
C1
p/π
C1
p/π
dCp
π
dCp
π
.
.
Figure 4.1. Regions in the(C1
p , dCp)-plane with different numbers of coexisting EFMs, as indicated
by the labelling. Panel (a) shows the regions on a fundamental 2π-interval ofC1
p , while panel (b) shows
it in the covering space (over several 2π-intervals ofC1
p ). Boundaries between regions are saddle-node
bifurcation curves (blue); also shown in panel (b) are periodic copies of the saddle-node bifurcation
curves (light blue). Labels Here∆1 = 0.050, ∆2 = −0.049, κ = 0.01, Λ = 0.005 anddτ = 0; these
parameter values are those for the EFM surface in figure 3.14 (b).
kind of effective feedback strength (as has been argued in section 2.1.1), it is possible to see
similarities between our findings and results on the number of coexisting EFMs for the single
FOF laser as presented, for example, in [31].
Figure 4.1 (b) illustrates how the regions in the(C1p , dCp)-plane can be related to the
projection of the EFM surface onto the(ωs, dCp)-plane. In figure 4.1 (b) we show the dark
blue saddle-node bifurcation curves from panel (a) over several 2π-intervals ofC1p ; since, each
saddle-node bifurcation curve is presented over different 2π-intervals ofC1p the curves do not

112 Chapter 4. Overall summary
−0.045 0 0.045−0.01
0
0.01
−0.055 0 0.055−0.011
0
0.011
ωs
ωs
Ns
Ns
(a)
(b)
.
.
Figure 4.2. EFM-components (grey) in the(ωs, Ns)-plane with stability information. Panel (a) is for
dCp = π, ∆1 = 0.050, ∆2 = −0.049, and panel (b) is fordCp = −π, ∆1 = 0.036, ∆2 = −0.037;
furthermore,κ = 0.01, Λ = 0.005 anddτ = 0. Stable segments of the EFM-components (green)
are bounded by the Hopf bifurcations (red dots) or by the saddle-node bifurcation (blue dots). The
actual stable EFMs forC1
p = 1.03π (a) andC1
p = 0.9π (b) are the black full circles; open circles are
unstable EFMs. The EFM components in panel (a) correspond toa constantdCp-section through the
EFM surface in figure 3.14 (b), and those in panel (b) to a constantdCp-section through the EFM surface
in figure 3.12 (d).
intersect. More importantly, the relative positions of the dark blue curves in figure 4.1 (b)
correspond to the structure of the saddle-node bifurcation curves in figure 3.15 (d), and hence,
the two figures can easily be related. Note that multiple periodic copies of the saddle-node
bifurcation curves in figure 4.1 (b) are coloured light blue. More generally, figure 4.1 shows
that, as in the case of the single FOF laser, the actual number of coexisting EFMs depends
strongly on the phase relation between the feedback and laser fields.
Figure 4.2 confirms the existence of multistability in the 2FOF system by analysing the
positions of the individual EFMs along the EFM components with stability information, for

4.1. Physical relevance of findings 113
two different sets of fixed parameters. Figure 4.2 (a) corresponds to the constantdCp-section,
for dCp = π, through the EFM surface of typeIBI in figure 3.14 (b); figure 4.2 (b) corresponds
to a constantdCp-section fordCp = −π through the EFM surface of typeBBB in figure 3.12
(d). There are stable segments (green) on each of the three EFM components in panels (a)
and (b); they are bounded either by the saddle-node bifurcations (bluedots) or by the Hopf
bifurcations (red dots). The black circles in figure 4.2 are the EFMs forC1p = 1.03π (a) and
for C1p = 0.9π (b); full circles indicate stable EFMs and open circles unstable EFMs.
The EFMs in figure 4.2 (a) are computed for parameter values from the region labelled
2 + 3 + 2 in figure 4.1 (a); in this case four of the EFMs are stable and lie within the respective
three stable segments of the EFM components. Note that the stable EFMs on the outer EFM
components lie very close to the boundaries of the respective stable segments. In fact, as can
be seen in figure 4.1 (a), for slightly different value ofC1p , EFMs exist only on two out of
three EFM components. In figure 4.2 (b) we show a more convincing example of multistabil-
ity, where three of the EFMs are stable and clearly lie well within the respective three stable
segments of the EFM components.
Figure 4.2 suggest that multistability is a rather common feature of the 2FOF laser, so that
it should be possible to observe it in experiments; for example as hysteresis[20]. What is
more, this figure demonstrates that the stability results presented in chapter 3 are indeed an
essential basis for the exploration of multistability in the 2FOF laser. A thoroughanalysis of
multistability of EFMs and investigation of stability of periodic solutions in the 2FOF laser are
a logical next step in the study of the 2FOF laser.


Bibliography
[1] V.I. A RNOLD, The theory of singularities and its applications, Accademia Nazionale
dei Lincei, Pisa, 1993.
[2] A. A SOK, About the cover: the mathematics imagery of Lun-Yi Tsai, Bulletin of the
AMS, 47(4) (2010), pp 695–697.
[3] J. CHEN, X. WU, J. GE, A. HERMERSCHMIDT, AND H. J. EICHLER, Broad-are laser
diode with 0.02 nm bandwidth and diffraction limited output due to double external
cavity feedback, Appl. Phys. Lett., 85(4) (2004), pp 1104–1106.
[4] M. CHI , N-S. BOGH, B. THESTRUP ANDP. M. PETERSEN, Improvement of the beam
quality of a broad-area diode laser using double feedback from two external mirrors,
Appl. Phys. Lett., 85 (2004), pp 1107–1109.
[5] J. S. COHEN, R. R. DRENTEN, AND B. H. VERBEECK, The effect of optical feedback
on the relaxation oscillation in semiconductor lasers, IEEE J. Quantum Electron., 24
(1988), pp. 1989–1995.
[6] B. DAHMANI , L. HOLLBERG, AND R. DRULLINGER, Frequency stabilization of semi-
conductor lasers by resonant optical feedback, Opt. Lett., 12 (1987), pp. 876–878.
[7] D. H. DETIENNE, G. R. GRAY, G. P. AGRAWAL , AND D. LENSTRA, Semiconduc-
tor laser dynamics for feedback from a finite-penetration-depth phase-conjugate mirror,
IEEE J. Quantum Electron., 33 (1997), pp. 838–844.
[8] O. DIEKMANN , S. A. VAN GILS, S. M. VERDUYN LUNEL AND H.-O. WALTHER,
Delay Equations: Functional-, Complex- and Nonlinear Analysis, Springer-Verlag, New
York, 1995.
[9] B. DOCTER, J. POZO, S. BERI, I. V. ERMAKOV, J. DANCKAERT, M. K. SMIT, AND
F. KAROUTA, Discretely tunable laser based on filtered feedback for telecommunication
applications, IEEE J. Sel. Topics Qunat. Electronics, 16(5) (2010), pp. 1405–1412.
113

114 BIBLIOGRAPHY
[10] F. DUMORTIER, R. ROUSSARIE, J. SOTOMAYOR, AND H. ZOLADEK, Bifurcations of
Planar Vector Fields. Nilpotent Singularities and Abelian Integrals, Lecture Notes in
Math. 1480, Springer-Verlag, Berlin, 1991.
[11] K. ENGELBORGHS, T. LUYZANINA , AND G. SAMAEY , DDE-BIFTOOL v. 2.00 user
manual: A Matlab package for bifurcation analysis of delay differential equations, Tech.
report tw-330, Department of Computer Science, K. U. Leuven, 2001.
[12] K. ENGELBORGHS, T. LUZYANINA AND D. ROOSE, Numerical bifurcation analysis of
delay differential equations using DDE-BIFTOOL, ACM Transactions on Mathematical
Software, 28 (2002), pp. 1–21.
[13] I. V.. ERMAKOV, V. Z. TRONCIU, P. COLET, AND C. R. MIRASSO, Controlling the
unstable emission of a semiconductor laser subject to conventional optical feedback with
a filtered feedback branch, Optics Express, 17(11) (2009), pp. 8749–8755.
[14] T. ERNEUX, A. GAVRIELIDES, K. GREEN AND B. KRAUSKOPF, External cavity
modes of semiconductor lasers with phase-conjugate feedback, Phys. Rev. E, 68 (2003),
p. 066205.
[15] T. ERNEUX, M. YOUSEFI, AND D. LENSTRA, The injection laser limit of lasers subject
to filtered optical feedback, in Proc. European Quantum Electronics Conf., 2003.
[16] H. ERZGRÄBER ANDB. KRAUSKOPF, Dynamics of a filtered-feedback laser: influence
of the filter width, Optics Letters, 32 (2007), pp. 2441–2443.
[17] H. ERZGRÄBER, B. KRAUSKOPF, AND D. LENSTRA, Bifurcation analysis of a semi-
conductor laser with filtered optical feedback, SIAM J. Appl. Dyn. Sys., 6 (2007), pp. 1–
28.
[18] H. ERZGRÄBER, B. KRAUSKOPF, D. LENSTRA, A. P. A. FISCHER, AND G. VEMURI,
Frequency versus relaxation oscillations in semiconductor laser with coherent filtered
optical feedback, Phys. Rev. E, 73, (2006), p. 055201(R).
[19] H. ERZGRÄBER, D. LENSTRA, B. KRAUSKOPF, A. P. A. FISCHER, AND G. VEMURI,
Feedback phase sensitivity of a semiconductor laser subject to filtered optical feedback:
experiment and theory, Phys. Rev. E, 76 (2007), p. 026212.
[20] B. FARIAS, T. P.DE SILANS , M. CHEVROLLIER, AND M. ORIÁ, Frequency bistability
of a semiconductor laser under a frequency-dependent feedback, Phys. Rev. Lett., 94
(2005), p. 173902.
[21] S. G. FISCHER, M. AHMED, T. OKAMOTO, W. ISHIMORI, AND M. YAMADA , An
improved analysis of semiconductor laser dynamics under strong optical feedback, IEEE
J. Quantum Electron., 9 (2003), pp. 1265–1274.

BIBLIOGRAPHY 115
[22] A. P. A. FISCHER, O. ANDERSEN, M. YOUSEFI, S. STOLTE, AND D. LENSTRA, Ex-
perimental and theoretical study of semiconductor laser dynamics due tofiltered optical
feedback, IEEE J. Quantum Electron., 36 (2000), pp. 375–384.
[23] A. P. A. FISCHER, M. YOUSEFI, D. LENSTRA, M. CARTER, AND G. VEMURI, Ex-
perimental and theoretical study of semiconductor laser dynamics due tofiltered optical
feedback, IEEE J. Sel. Top. Quantum Electron., 10 (2004), pp. 944–954.
[24] A. FISCHER, M. YOUSEFI, D. LENSTRA, M. CARTER, AND G. VEMURI, Filtered
optical feedback induced frequency dynamics in semiconductor lasers, Phys. Rev. Lett.,
92 (2004), p. 023901
[25] I. FISCHER, G. H. M. VAN TARTWIJK, A. M. L EVINE, W. ELSÄSSER, E. GÖBEL,
AND D. LENSTRA, Fast pulsing and chaotic itinerancy with a drift in the coherence
collapse of semiconductor lasers, Phys. Rev. Lett., 76 (1996), pp. 220–223.
[26] M. GOLUBITSKY AND D. G. SCHAEFFER, Singularities and Groups in Bifurcation
Theory, volume 1, Springer-Verlag, 1985.
[27] K. GREEN AND B. KRAUSKOPF, Bifurcation analysis of a semiconductor laser subject
to non-instantaneous phase-conjugate feedback, Opt. Commun., 231 (2004), pp. 383–
393.
[28] K. GREEN AND B. KRAUSKOPF, Mode structure of a semiconductor laser subject to
filtered optical feedback, Opt. Commun., 258 (2006), pp. 243–255.
[29] B. HAEGEMAN, K. ENGELBORGHS, D. ROOSE, D. PIEROUX, AND T. ERNEUX, Sta-
bility and rupture of bifurcation bridges in semiconductor lasers subject to optical feed-
back, Phys. Rev. E, 66 (2002), p. 046216.
[30] T. HEIL , I. FISCHER, W. ELSÄSSER, B. KRAUSKOPF, K. GREEN, A. GAVRIELIDES,
Delay dynamics of semiconductor lasers with short external cavities: Bifurcation sce-
narios and mechanisms, Phys. Rev. E, 67 (2003), p. 066214.
[31] G. HEK AND V. ROTTSCHÄFER, Semiconductor laser with filtered optical feedback:
from optical injection to conventional feedback, IMA J. Appl. Math., 72 (2007), pp. 420–
450.
[32] C. HENRY, Theory of the linewidth of semiconductor lasers, IEEE J. Quantum Electron.,
18 (1982), pp. 259–264.
[33] D. M. KANE AND K. A. SHORE (EDS.), Unlocking Dynamical Diversity: Optical
Feedback Effects on Semiconductor Lasers, Wiley, 2005.

116 BIBLIOGRAPHY
[34] B. KRAUSKOPF, Bifurcation analysis of lasers with delay, in Unlocking Dynamical
Diversity: Optical Feedback Effects on Semiconductor Lasers, D. Kane and K. Shore,
eds., pp. 147–183, Wiley, 2005.
[35] B. KRAUSKOPF, H. ERZGRÄBER AND D. LENSTRA, Dynamics of semiconductor
lasers with filtered optical feedback, in Semiconductor Lasers and Laser Dynamics II,
D. LENSTRA, M. PESSA AND I. H. WHITE, eds., Proceedings of SPIE 6184, 61840V,
2006.
[36] B. KRAUSKOPF, AND C. ROUSSEAU, Codimension-three unfoldings of reflectionally
symmetric planar vector fields, Nonlinearity, 10 (1997), pp. 1115–1150.
[37] B. KRAUSKOPF, G.R. GRAY, AND D. LENSTRA, Semiconductor laser with phase-
conjugate feedback: Dynamics and bifurcations, Phys. Rev. E, 58 (1998), pp. 7190–
7197.
[38] B. KRAUSKOPF AND D. LENSTRA (EDS.), Fundamental Issues of Nonlinear Laser
Dynamics, AIP Conference Proceedings 548, AIP, Melville, New York, 2000.
[39] B. KRAUSKOPF, H. OSINGA, AND J. GALÁN -V IOQUE, eds.,Numerical Continuation
Methods for Dynamical Systems, Pathfollowing and boundary value problems, Springer,
Dordrecht, 2007.
[40] B. KRAUSKOPF, G. H. M. VAN TARTWIJK AND G. R. GRAY, Symmetry properties of
lasers subject to optical feedback, Opt. Commun., 177 (2006), pp. 347–353.
[41] B. KRAUSKOPF, C. M. LEE, AND H. OSINGA, Codimension-one tangency bifurca-
tions of global Poincaré maps of four-dimensional vector fields, Nonlinearity, 22 (2009),
pp. 1091–1121.
[42] YU. A. KUZNETSOV, Elements of Applied Bifurcation Theory, Springer-Verlag, New
York, 1995.
[43] R. LANG AND K. KOBAYASHI, External optical feedback effects on semiconductor
injection laser properties, IEEE J. Quantum Electron., 16 (1980), pp. 347–355.
[44] L. L ARGER, P.-A. LACOURT, S. POINSOT, AND M. HANNA , From flow to map in
an experimental high-dimensional electro-optic nonlinear delay oscillator, Phys. Rev.
Lett., 95 (2005), p. 043903.
[45] D. LENSTRA, M. VAN VAALEN , AND B. JASKORZYNSKA, On the theory of a single-
mode laser with weak optical feedback, Physica B+C, 125 (1984), pp. 255–264.

BIBLIOGRAPHY 117
[46] D. LENSTRA AND M. YOUSEFI, Theory of delayed optical feedback in lasers, in Fun-
damental Issues of Nonlinear Laser Dynamics, B. Krauskopf and D. Lenstra, eds., AIP
Conference Proceedings 548, pp. 87–111, AIP, Melville, New York,2000.
[47] A. M. L EVINE, G. H. M. VAN TARTWIJK, D. LENSTRA, AND T. ERNEUX, Diode
lasers with optical feedback: Stability of the maximum gain mode, Phys. Rev. A 52
(1995), R3436–R3439.
[48] B. E. MARTÍNEZ-ZÉREGA, R. JAIMES-REATEGUI, A. N. PISARCHIK AND J. M. LIU,
Experimental study of self-oscillation frequency in a semiconductor laser with optical
injection, J. Phys.: Conf. Ser., 23 (2005), pp. 62–67.
[49] J. MORK, B. TROMBORG, AND J. MARK, Chaos in semiconductor lasers with optical
feedback: theory and experiment, IEEE J. Quantum Electron., 28 (1992), pp. 93–108.
[50] A. NAUMENKO, P. BESNARD, N. LOIKO, G. UGHETTO, J. C. BERTREUX, Character-
istics of a semiconductor laser coupled with a fiber Bragg grating with arbitrary amount
of feedback, IEEE J. Quantum Electron., 39 (2006), pp. 1216–1228.
[51] M. N IZETTE AND T. ERNEUX, Optical frequency dynamics and relaxation oscillations
of a semiconductor laser subject to filtered optical feedbackin Semiconductor Lasers
and Laser Dynamics II, D. Lenstra, M. Pessa and Ian H. White, eds., Proceedings of
SPIE 6184-32, 2006.
[52] Oclaro,data sheets for grating-stabilized 980nm pump laser modules; LC94 300mW,
PLC94 Rev 3.1 August 2009; LC96 600mW, PLC96 Rev 4.1 August 2009.
[53] T. POSTON AND I. STEWART Catastrophe Theory and its Applications, Pitman Publish-
ing Ltd., 1978.
[54] F. ROGISTER, P. MÉGRET, O. DEPARIS, M. BLONDEL, AND T. ERNEUX, Suppression
of low-frequency fluctuations and stabilization of a semiconductor laser subjected to op-
tical feedback from a double cavity: theoretical results, Opt. Lett., 24 (1999), pp. 2441-
2443.
[55] F. ROGISTER, D. W. SUKOW, A. GAVRIELIDES, P. MÉGRET, O. DEPARIS, AND
M. BLONDEL, Experimental demonstration of suppression of low-frequency fluctua-
tions and stabilization of an external-cavity laser diode, Opt. Lett. 25 (2000), pp. 808–
810.
[56] D. ROOSE ANDR. SZALAI , Continuation and bifurcation analysis of delay differential
equations, in Numerical Continuation Methods for Dynamical Systems, Pathfollowing
and boundary value problems, B. Krauskopf, H. Osinga, and J. Galán-Vioque, eds.,
pp. 359–399, Springer, Dordrecht, 2007.

118 BIBLIOGRAPHY
[57] V. ROTTSCHÄFER AND B. KRAUSKOPF, The ECM-backbone of the Lang-Kobayashi
equations: a geometric picture, Int. J. Bifurcation and Chaos, 17 (2007), pp. 1575-1588.
[58] T. SANO, Antimode dynamics and chaotic itinerancy in the coherence collapse of semi-
conductor lasers with optical feedback, Phys. Rev. A, 50 (1994), pp. 2719–2726.
[59] J. SONKSEN, M. AHMAD , N. STORCH, H. KRAUSE, S. BLOM , A. PÖTZL, AND
H. HILLMER , Controlling and tuning the emission of a semiconductor optical amplifier
for sensor application by means of fiber Bragg gratings,Proceedings of the 8th WSEAS
Int. Conf. on Microelectronic, Nanoelectronics, Optoelectronics (2009), pp. 59-62.
[60] J. SONKSEN, M. AHMAD , N. STORCH, H. KRAUSE, S. BLOM , A. PÖTZL, AND
H. HILLMER , Aufbau eines faserbasierten Laserresonators mit zwei Fabri-Pérot Kav-
itäten und einer gemeinsamen aktiven Zone für Sensonrikanwendungen ,DGaO Pro-
ceedings 2008; ISSN: 1614-8436.
[61] G. H. M. VAN TARTWIJK AND D. LENSTRA, Semiconductor lasers with optical injec-
tion and feedback, Quantum Semiclass. Opt., 7 (1995), pp. 87–143.
[62] B. TROMBORG, J. OSMUNDSEN, AND H. OLESEN, Stability analysis for a semicon-
ductor laser in an external cavity, IEEE J Quantum Electron., 20 (1984), pp. 1023–1032.
[63] V. Z. TRONCIU, C. R. MIRASSO, AND P. COLET, Chaos-based communications using
semiconductor lasers subject to feedback from an integrated double cavity, J. Phys. B:
At. Mol. Opt. Phys, 41 (2008), p. 155401.
[64] V. Z. TRONCIU, H.-J. WÜNSCHE, M. WOLFRUM AND M. RADZIUNAS, Semiconduc-
tor laser under resonant feedback from a Fabry-Perot resonator: Stability of continuous-
wave operation,Phys. Rev. E, 73 (2006), p. 046205.
[65] S. VALLING , B. KRAUSKOPF, T. FORDELL AND A. L INDBERG, Experimental bifur-
cation diagram of a solid state laser with optical injection, Optics Communications, 271
(2007), pp. 532–542.
[66] H. VENGHAUS (ED.), Wavelength Filters in Fibre Optics, Springer, Berlin, 2006.
[67] S. M. VERDUYN LUNEL AND B. KRAUSKOPF, The Mathematics of Delay Equations
with an Application to the Lang-Kobayashi Equations, in Fundamental Issues of Non-
linear Laser Dynamics, B. Krauskopf and D. Lenstra, eds., AIP Conference Proceedings
548, pp. 66-87, AIP, Melville, New York, 2000.
[68] S. WIECZOREK, B. KRAUSKOPF, AND D. LENSTRA, A unifying view of bifurcations in
a semiconductor laser subject to optical injection, Opt. Commun., 172 (1999), pp. 279–
295.

BIBLIOGRAPHY 119
[69] S. WIECZOREK, B. KRAUSKOPF, AND D. LENSTRA, Sudden chaotic transitions in an
optically injected semiconductor laser, Opt. Lett, 26 (2001), pp. 816–818.
[70] S. WIECZOREK, B. KRAUSKOPF, AND D. LENSTRA, Unnested islands of period dou-
blings in an injected semiconductor laser, Phys. Rev. E, 64 (2001), p. 056204.
[71] S. WIECZOREK, T. B. SIMPSON, B. KRAUSKOPF, AND D. LENSTRA, Bifurcation
transitions in an optically injected diode laser: theory and experiment, Optics Commu-
nications, 215 (2003), pp. 125–134.
[72] S. WIECZOREK, B. KRAUSKOPF, T. B. SIMPSON, AND D. LENSTRA, The dynami-
cal complexity of optically injected semiconductor lasers, Physics Reports, 416 (2005),
pp. 1–128.
[73] J. YE, H. LI , AND J. G. MCINERNEY,, Period-doubling route to chaos in a semicon-
ductor laser with weak optical feedback, Phys. Rev. A, 47 (1993), pp. 2249–2252.
[74] M. YOUSEFI AND D. LENSTRA, Dynamical behaviour of a semiconductor laser with
filtered external optical feedback, IEEE J. Quantum Electron., 35 (1999), pp. 970–976.
[75] M. YOUSEFI, D. LENSTRA, A. FISCHER, AND G. VEMURI, Simulations of a semi-
conductor laser with filtered optical feedback: deterministic dynamics and transitions
to chaos, in Physics and Simulation of Optoelectronic Devices X, P. Blood, M. Osinski,
and Y. Arakawa, eds., Proceedings of SPIE 4646, pp. 447–452, 2002.
[76] M. YOUSEFI, D. LENSTRA, AND G. VEMURI, Nonlinear dynamics of a semiconductor
laser with filtered optical feedback and the influence of noise, Phys. Rev. E, 67 (2003),
p. 046213.
[77] M. YOUSEFI, D. LENSTRA, G. VEMURI, AND A. P. A. FISCHER, Control of nonlinear
dynamics of a semiconductor laser with filtered optical feedback, IEEE Proc. Optoelec-
tron., 148 (2001), pp. 223–237.


Appendix A
How to construct the EFM surface
In our work we present structure and stability information of the EFMs by means of showing
the EFM surface in(ωs, dCp, Ns)-space. Since, explicit and easily solvable equations for the
EFMs and their stability do not exist, we find them numerically and we use state-of-the-art
numerical techniques to determine their properties.
The process of constructing the EFM surface can be split into several steps. First, for the
chosen parameter values, we compute a sufficient number of constantdCp sections through
the EFM surface. We then use this computed data to render the EFM surface. Finally, we add
computed stability information to the EFM surface and its two dimensional projections. Each
of the steps is automated as much as is practical; to calculate and render the EFMsurface in an
efficient way, we developed a set of interactive MATLAB scripts and functions.
Recall that, to present the classification of different types of the EFM surfaces in sec-
tion 2.3, it was enough to use Eq. (2.16), which describes the boundary ofthe EFM surface
projection onto the(ωs, dCp)-plane independently of any state variables of the 2FOF laser.
The advantage of this approach is that it allowed for the fast computation ofthe (ωs, dCp)-
projections of the EFM surface for a wide range of the system parameters, in particular, for
different values of the filter detunings∆1 and∆2. However, equation (2.16) for the(ωs, dCp)-
projection boundary does not provide any information on EFMs stability. Furthermore, in
section 2.1 we showed that the EFMs themselves can be calculated as solutionsof the tran-
scendental equations (2.3)–(2.8) and, hence, these could be used to follow EFMs with changing
parameters with any numerical continuation package. However, Eqs. (2.3)–(2.8) also do not
provide the EFM stability information. In fact, to analyse EFM stability it is necessary to con-
tinue the solutions of the full DDE system (1.1)–(1.4); to this end, we use the MATLAB pack-
age DDE-BIFTOOL [11]. The EFM stability information, uncovered with DDE-BIFTOOL,
can be presented either on the EFM surface itself or in any conveniently chosen EFM surface
projection. We now describe our numerical strategy to deal with the mathematical challenges
associated with the analysis of the EFM structure of Eqs. (1.1)–(1.4).
121

122 Appendix A
A.1 Dealing with the S1-symmetry of the 2FOF laser model
In section 1.1 we mentioned that the system (1.1)–(1.4) shares symmetry properties with many
other systems with coherent optical feedback. Namely, system (1.1)–(1.4) has anS1-symmetry,
meaning that the equations are equivariant under any elementb ∈ S1, which is physically a
rotation with a specific phase. This equivariance is the result of the fact that Eq. (1.1) is linear
in E and thatE enters Eq. (1.2) only as its modulus|E| [29, 34, 40]. As a consequence,
solutions of Eqs. (1.1)–(1.4) are group orbits under theS1-symmetry; trajectories in the group
orbit run entirely parallel, and differ only in their phases; see Eq. (1.5).In other words, one can
obtain infinitely many trajectories of the system (1.1)–(1.4) by multiplyingE, F1 andF2 by
any complex number of modulus one; this is true even for chaotic trajectories [40]. Since the
symmetry cannot be simply divided out from the equations, to resolve the phase indeterminacy
of Eqs.(1.1)–(1.4) we consider intersection of the group orbits with the fixed six-dimensional
hyper-half plane
S = (E, N, F1, F2) | Im(E) = 0 and Re(E) ≥ 0 ; (A.1)
these intersections are also called the trace [34, 40]. Note that, the trace ofgroup orbits of Eqs.
(1.1)–(1.4) consist of isolated trajectories which can be studied with numerical continuation.
In practice to analyse the trace of the 2FOF laser by continuation with DDE-BIFTOOL,
it is necessary to transform Eqs.(1.1)–(1.4) into a system in which the phase indeterminacy is
expressed explicitly. To this end, we substitute ansatz
(E, N, F1, F2(t)) =(Eeibt, N, F1e
ibt, F2eibt)
(A.2)
into (1.1)–(1.4) and divide through by an exponential factor, which results in the transformed
system
dE
dt= (1 + iα)N(t)E(t) − ibE(t) + κ1F1(t) + κ2F2(t), (A.3)
TdN
dt= P − N(t) − (1 + 2N(t))|E(t)|2, (A.4)
dF1
dt= Λ1E(t − τ1)e
−iC1p + (i∆1 − Λ1 − ib)F1(t), (A.5)
dF2
dt= Λ2E(t − τ2)e
−iC2p + (i∆2 − Λ2 − ib)F2(t). (A.6)
Hereb is an extra free parameter that allows for direct parametrisation of all trajectories in a
group orbit [17, 29, 40, 56]. In other words, each value ofb correspond to one trajectory from

A.2. Computation and rendering of the EFM surface 123
the group orbit. Note that solutions of system (A.3)–(A.6) have the same stability properties as
the solutions of system (1.1)–(1.4). In particular, they have a trivial additional zero eigenvalue,
which must be taken into account for the appropriate stability and bifurcationanalysis of the
solutions [17, 40, 45].
Eqs. (A.3)– (A.6) are of a form in which, by uniquely determining the parameter b, the
phase indeterminacy can be resolved. This can be achieved by requiring, for example, that
Im(E) = 0 in Eq. (A.3); in this way, continuous-wave states of Eqs. (A.3)– (A.6) indeed cor-
respond to the trace of solutions of (1.1)– (1.4). In other words, a one-dimensionalS1-family
of solutions in the seven-dimensional physical space is transformed into a pair consisting of
the one-dimensional trajectory in a six-dimensional sub-space, and associated unique value of
the phase parameterb; for example, a cw-state, which is a circular periodic trajectory of pe-
riod 2π/b in (E, N, F1, F2(t))-space, transforms into an isolated point in the six-dimensional
sub-space with associated frequencyb. Furthermore, by considering cw-states the numerical
strategy gains physical interpretation: the free parameterb is equivalent to the frequencyωs of
an EFM; see section 2.1.
Implementation of the above strategy in DDE-BIFTOOL is straight forward: inaddi-
tion to defining system (A.3)–(A.6) in the form of seven real equations in filesys_rhs.m,
one also needs to specify the condition Im(E) = 0 as an extra equation in the separate file
sys_cond.m. An example of using the same approach to continue solutions of two linearly
coupled oscillators with DDE-BIFTOOL is presented in [12]. More generally, the method
demonstrated here make use of the fact that finding a unique solution of a system of equations
requires that the number of equations and number of unknowns must be equal.
A.2 Computation and rendering of the EFM surface
Generally, to construct the EFM surface in(ωs, dCp, Ns)-space we first compute a number
of sections that are uniformly distributed along the 2π dCp-range considered. Next we use
this computed data to render the EFM surface. Recall, that a constant-dCp section through the
EFM surface in(ωs, dCp, Ns)-space corresponds to the EFM components, which are closed
curves traced by the EFMs with changing feedback phase; see section 2.1.1. To compute the
necessary slices, that is the EFM components, we continue the EFMs with DDE-BIFTOOL
[11]. To ensure thatdCp is fixed, we substituteC2p = C1
p + dCp in Eqs. (A.3)–(A.6). In this
way, by continuation of a single EFM, in the continuation parameterC1p , over several multiples
of 2π, we indeed obtain constantdCp sections through the EFM surface in(ωs, dCp, Ns)-
space. Note that to construct the EFM surface without the stability informationone could also
use Eqs. (2.10) and (2.16).

124 Appendix A
We now present more detailed information on computing and plotting the EFM surface.
First we use the boundary equation (2.16) to find the values ofωs, in dependence ondCp, at
the edges of the bands and holes of the EFM surface. Since, the EFM components are closed
loops, we only need half of the boundary points; for example, those at theleft ends of the EFM
components. We obtain at most three such boundary values ofωs for each value ofdCp. Since,
Eq. (2.16) gives the(ωs, dCp)-projection of a single instance of the EFM surface, even for
dτ 6= 0 there are at most three boundary values ofωs for each value ofdCp. (Recall that, the
extra EFM components that appear in case ofdτ 6= 0 belong to 2π-shifted copies of the basic
instance of the EFM surface.) Typically, to construct the EFM surface, for dτ = 0, in chapter
3, we use 150 values ofdCp that are distributed uniformly along thedCp interval of length 2π.
However, the actual number and distribution of the points along thedCp-axis depends on the
type of the EFM surface and is specified by the user.
After finding ωs anddCp values of the starting points, we setC1p = 0 and use Eq. (2.5)–
(2.8) to compute initial values of the other state variables. SinceC1p = 0 is a guess, we use the
DDE-BIFTOOL correction routine to correct the values ofC1p and the state variables; during
this correction the values ofωs anddCp are kept fixed.
For the purpose of surface rendering, we want all the EFM componentsto be computed in
one direction, e.g. clockwise. Therefore, a second point for the continuation must be specified
in a careful way. We proceed by taking the first point (computed in the previous step), and apply
a small positive perturbation to the corrected value ofC1p . Next, we correct values of the state
variables of the second point to ones that correspond to the new value ofC1p . Having those two
points allows us to define and continue with DDE-BIFTOOL the respective branch of EFMs.
Moreover, all the branches are continued in the same direction — of increasing C1p . As the
result of the above procedure, we now have a set of uniformly distributed constantdCp sections
through the EFM surface. Each of these sections may consist of up to three EFM components.
Typically, the procedure is run from a script in MATLAB; after setting up all the script and
continuation accuracy parameters it takes around one hour to calculate allthe sections needed
to construct one instance of the EFM surface. Note that chosing the continuation accuracy to
be to low may lead to gaps in the computed sections of the EFM surface, or evento erroneous
switching between disjoint EFM components.
The rendering of the EFM surface proceeds as follows. We first assign all the computed
EFM components to the particular bands and island of the EFM surface. In case that band (or
island) of the EFM surface has holes or bulges, we divide the EFM components assigned to
this band (or island) into smaller groups which we further assign to local bands and islands.
To this end, we consider intervals of the 2π dCp-range within which the number of the EFM
components isdCp-independent. Note that this rendering step is directly associated with the
EFM surface type. For example, to construct EFM surface of typeBBh in figure 3.12 (c), we
considered separately the left bandB and and the right band with holeBh. Furthermore, we

A.3. Determining the stability of EFMs 125
divided the EFM components associated with the bandBh into four groups: the first group cor-
responded to a single band before the hole, two other groups corresponded to separate bands on
the left and right side of the hole, and the last group was assigned to a single band past the hole.
We then use these groups of the EFM components to generate separate meshes to represent
each local segment of the EFM surface. To fill gaps between segments ofthe EFM surface ob-
tained in this way, or to close discontinuities at the edges we compute some additional branches
of the EFMs as necessary.
For each of the EFM component group we generate a separate mesh. We first check that
each of them EFM components in the group is a single closed loop, and we trim it otherwise
(since,C1p is 2π-periodic it is possible to go along the EFM component more than once); here
m is the number of EFM components in the group. Next, we rewrite the values ofωs, dCp and
Ns of each point of an EFM component from the DDE-BIFTOOL solution branch structure
into a 3 × k matrix K, wherek is the number of points along the branch. Furthermore, we
apply constant arclength interpolation along each curve defined byK; in result we obtain a
new3 × l matrix L that consist ofl uniformly spaced mesh points. Finally, we split each of
them matricesL into rows, and construct three separatem× l mesh matrices, forωs, dCp and
Ns, which are used to plot the EFM surface; recall that,l is the number of mesh points (after
arclength interpolation) andm is the number of EFM components in the considered group.
On the basis of the above algorithm we developed a MATLAB function that automatically
generates the mesh for the group of the EFM components corresponding toa band or an island
of the EFM surface; the mesh is plotted with built-in MATLAB functions —surf andlight
with appropriate parameters. We process each band or island of the EFM surface separately,
and later plot them one by one in the same figure. A typical size of the mesh representing the
whole EFM surface (over a 4π dCp-range) in chapter 3 is about3 × 300 × 1500 points.
We used these computations to construct all of the EFM surfaces in chapters 2 and 3. To
show the EFM surface near singularity transitions as presented in section 2.3.3 in figures 2.12–
2.15 and in section 2.3.4 in figure 2.16 and figure 2.22, we first selected parameter values most
suitable for the computation of the EFM surface near the singularity transition.To this end, we
analysed the EFM surface bifurcation diagram in the(∆1, ∆2)-plane. To confirm our choice
of parameters we reviewed quite a large number of projections of the EFM surface onto the
(ωs, dCp)-plane near the transition; recall that, the projections are computed quickly with the
projection boundary equation (2.16). We then used the above procedure to calculate and render
the relevant parts of the EFM surface.
A.3 Determining the stability of EFMs
In chapter 3 we also showed figures of the EFM surface with stability information. These were
obtained as follows. We compute the stability of EFMs along EFM components with DDE-

126 Appendix A
BIFTOOL. However, computations of the EFM stability information are much morecomputa-
tionally expensive than computations of the EFMs themselves. More specifically, for optimally
chosen stability computation parameters, it takes around half a second to compute the stability
of a single EFM; that is around 20 times longer than the computation of the EFM itself. There-
fore, we compute information on EFM stability only for half of the EFM components used
to construct the EFM surface, that is, typically 75 over the 2π dCp-interval. Furthermore, we
limit the number of points along an EFM component for which we run computationsto 150.
In spite of these restriction, it takes around three hours to calculate the stability information for
a single instance of the EFM surface. Note that chosing the accuracy parameters for a stability
computation to be to low may lead to errors in the determination of stable EFM regions. To
ensure appropriate accuracy of their computation we checked the alignment of the stable seg-
ments of the EFM components with their known boundaries given by independently computed
saddle-node and Hopf bifurcation curves. Additionally, we also checked the consistency of the
saddle-node and Hopf bifurcation curves themselves.
The saddle-node and Hopf bifurcation curves are computed separatelyas two-parameter
continuations inC1p andC2
p ; starting points are conveniently chosen from saddle-node and Hopf
bifurcations found at the computed EFM components. Note that, to continue thesaddle-node
bifurcations it is necessary to use solutions of the transcendental system(2.3)–(2.8); namely
the transformed system Eqs. (A.3)-(A.6) always has an extra eigenvalue 0. On the other hand,
Hopf bifurcation curves are continued in the full DDE system Eqs. (A.3)-(A.6).
Once the EFM surface is rendered and the stability information is calculated, we overlay the
computed stable segments of the EFM components and the saddle-node and Hopf bifurcation
curves onto the EFM surface. This is done with a set of MATLAB scripts that trim and plot the
bifurcation curves modulo 2π, and with a set of modified DDE-BIFTOOL plotting routines;
these modifications allow us to plot the solution branches in three dimensions.