Better Engineering through Better Models
55
Better Engineering through Better Models Edward A. Lee Robert S. Pepper Distinguished Professor UC Berkeley Plenary Talk International Conference on Complex Systems Engineering (ICCSE) November 9, 2015. Storrs, CT, USA
Transcript of Better Engineering through Better Models

Better Engineering through Better Models
Edward A. Lee Robert S. Pepper Distinguished Professor UC Berkeley Plenary Talk International Conference on Complex Systems Engineering (ICCSE) November 9, 2015. Storrs, CT, USA

!"#$%&'"%()$"%*&+',-./'&%"012&'3'45%.&5-',0!""•! #$%&'"("!"#$%&'()•! #)*+,-./)0"("*#+',%&$)•! 1&2,'3-$"("-'./0#)6'&",.7*1/'&$8%•! 4352'&-&"657"12+3+424$)•! 85$029')0),5"657"5%,/6"•! 8:;)'3-9*5"657"*#+',%&$)•! <2)0)*3&5")="52.:&">2:),?@"657"72&'(%0#)8.29:)•! A3;9"+&'=)'*.02&"657"72;)<+/=9#)•! 8?.+-.%3:3-$"657">/?/'0'@%(%0#)•! A3;9"2)00&2/63-$"657"-/&4=%0#)'+6)!=%A'&#)•! 12.:.%3:3-$"657">/(%'@%(%0#)'+6)!=/6%&0'@%(%0#)•! B.C5".0?"D&;,:./)05"657"5/&"+%&'()!2$$%@%(%3/$)!&&'9./'&8%#$%&'E+9$532.:"5$5-&*5".'&"=,0?.*&0-.::$"?3F&'&0-"=')*"2)*+,-./)0.:"5$5-&*5".0?"=')*"+9$532.:"5$5-&*57"G9&$"'&H,3'&"0&C"&0;30&&'30;"*)?&:5"-9.-"&*%'.2&"-&*+)'.:"?$0.*325".0?".:;)'3-9*32"2)*+,-./)07"
Automotive
Biomedical
Military
Energy
Manufacturing
Avionics
Buildings
2
#$%&'EI9$532.:"1$5-&*5">#I1@"J0?&':3&5"*,29")="-9&"30?,5-'3.:"&2)0)*$"

The order and timing of events matters a lot when interacting with physical processes. The system at the right orchestrates hundreds of microcontrollers to deposit ink on paper flying through the printer at 100 km/h with micron precision.
Lee, Berkeley 3
This Bosch Rexroth printing press is a cyber-physical factory using Ethernet and TCP/IP with high-precision clock synchronization (IEEE 1588) for real-time control.
G3*30;"I')%:&*5"B))*"B.';&"30"#$%&'EI9$532.:"1$5-&*5"

K0"G935"G.:L!"M)2,5")0"N)?&:5"
Lee, Berkeley 4

N)?&:5"657"D&.:3-$"
K0"-935"&O.*+:&P"-9&",26/(%+9).=',/;2=B)35"2.:2,:,5".0?"Q&C-)0R5":.C57""C%6/(%0#"35"9)C"C&::"-9&"*)?&:".0?"3-5"-.';&-"*.-29"
Lee, Berkeley 5
The model
The target (the thing being modeled).

Solomon Wolf Golomb
Engineers all too often conflate the model with its target.
You will never strike oil by drilling through the map!
Lee, Berkeley 6
Keep Clear the Distinction Between the Model and its Target"
But this does not in any way diminish the value of a map!

129&*./2")="."53*+:&"#I1"
Lee, Berkeley 7
What kinds of models should we use? Let’s look at the most successful kinds of models from the cyber and the physical worlds.

1)SC.'&"35"."N)?&:"
I9$532.:"1$5-&*" D26/()
-%+9(/E0"=/'6/6)%,?/='3A/)?=29=',$)Lee, Berkeley 8
I9$532.:"1$5-&*"
-%+9(/E0"=/'6/6)%,?/='3A/)?=29=',$)

1)SC.'&"'&:3&5")0".0)-9&'"*)?&:"-9.-".%5-'.2-5"-9&"9.'?C.'&"
I9$532.:"1$5-&*" Model
Instruction Set Architectures (ISAs) Lee, Berkeley 9
Image: Wikimedia Commons Waterman, et al., The RISC-V Instruction Set Manual, UCB/EECS-2011-62, 2011

4&-&'*30.2$"
1)*&"*)?&:30;"='.*&C)'L5"5,++)'-"-9&"2)05-',2/)0")="6/0/=,%+%$3&"*)?&:57"
"8"*)?&:"35"6/0/=,%+%$3&)3=P";36&0"-9&"303/.:"5-.-&".0?"-9&"30+,-5P"-9&"*)?&:"?&T0&5"&O.2-:$")0&"%&9.63)'7"
"4&-&'*3035/2"*)?&:30;"='.*&C)'L5"9.6&"+')6&0"&O-'&*&:$"6.:,.%:&"30"-9&"+.5-7"
Lee, Berkeley 10

#)053?&'"530;:&E-9'&.?&?""3*+&'./6&"+');'.*5"
G9&"-.';&-")="-9&"*)?&:"35"0)0?&-&'*3035/2">&:&2-')05".0?"9):&5"5:)5930;".'),0?"30"53:32)0@7"
This program defines exactly one behavior, given the input x. Note that the modeling framework (the C language, in this case) defines “behavior” and “input.”
Lee, Berkeley 11 Lee, Berkeley

4&-&'*3035/2"N)?&:5"=)'"-9&""I9$532.:"13?&")="#I1"
I9$532.:"1$5-&*" D26/()
Signal Signal
*%F/=/+3'()<G4'32+$)Lee, Berkeley 12
Image: Wikimedia Commons

Signal Signal
13 Image: Wikimedia Commons Lee, Berkeley
8"N.U)'"I')%:&*"=)'"#I1!"#)*%30./)05")="4&-&'*3035/2"N)?&:5".'&"Q)0?&-&'*3035/2"
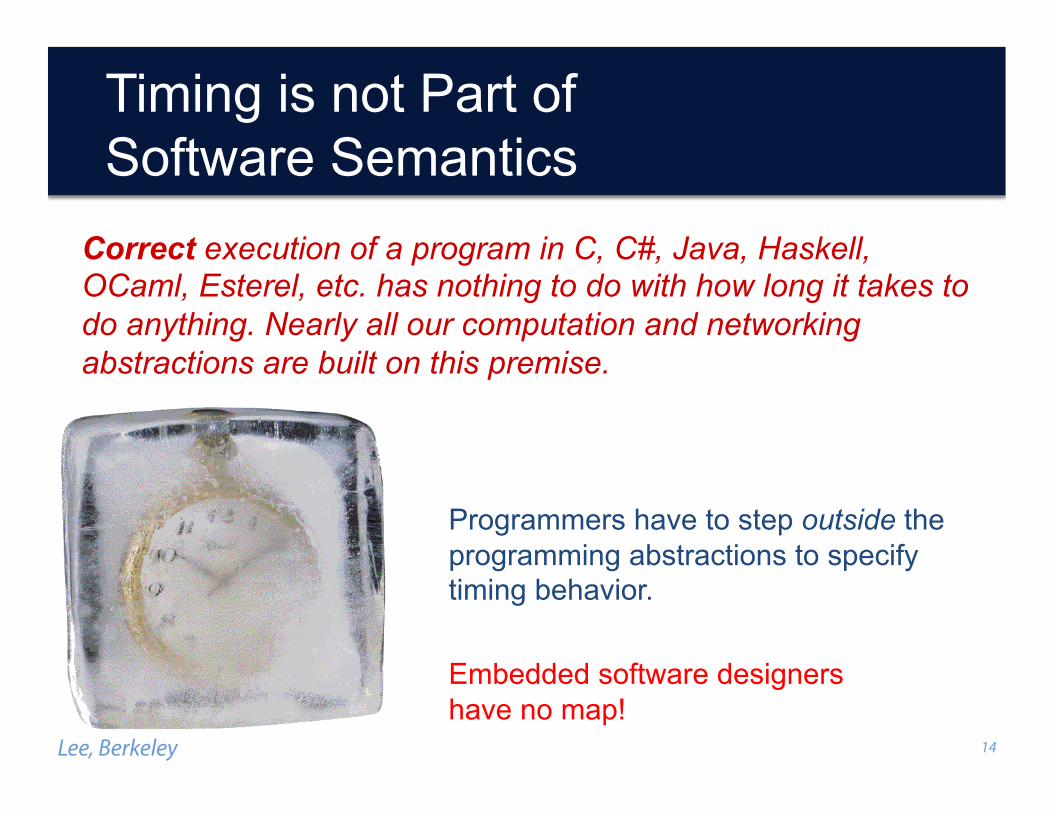
Correct execution of a program in C, C#, Java, Haskell, OCaml, Esterel, etc. has nothing to do with how long it takes to do anything. Nearly all our computation and networking abstractions are built on this premise.
Programmers have to step outside the programming abstractions to specify timing behavior. Embedded software designers have no map!
Lee, Berkeley 14
Timing is not Part of Software Semantics"

Lee, Berkeley 15
G9&"N)?&:"

Lee, Berkeley 16 Image: Wikimedia Commons
USB interface
JTAG and SWD interface
graphicsdisplay
CAN bus interface
Ethernet interface
analog(ADC)inputs
micro-controller
removable flash
memoryslot
PWM outputs
GPIO connectors
switchesconnected
to GPIO pinsspeakerconnected toGPIO or PWMG9&"D&.:3-$"

Lee, Berkeley 17
G9&"N)?&:"35"0)-"*,29"*)'&"?&-&'*3035/2"-9.0"-9&"'&.:3-$"
5"/),26/(%+9)('+94'9/$)"'A/)6%$H2%+0I)
%+&2,?'3@(/)$/,'+3&$)

Lee, Berkeley 18 Image: Wikimedia Commons
1$5-&*"?$0.*325"&*&';&5"=')*"-9&"+9$532.:"'&.:3V./)0"
USB interface
JTAG and SWD interface
graphicsdisplay
CAN bus interface
Ethernet interface
analog(ADC)inputs
micro-controller
removable flash
memoryslot
PWM outputs
GPIO connectors
switchesconnected
to GPIO pinsspeakerconnected toGPIO or PWM
J)(/'6%+9)02)')K?=2020#?/)'+6)0/$0L)
$0#(/)2.)6/$%9+)
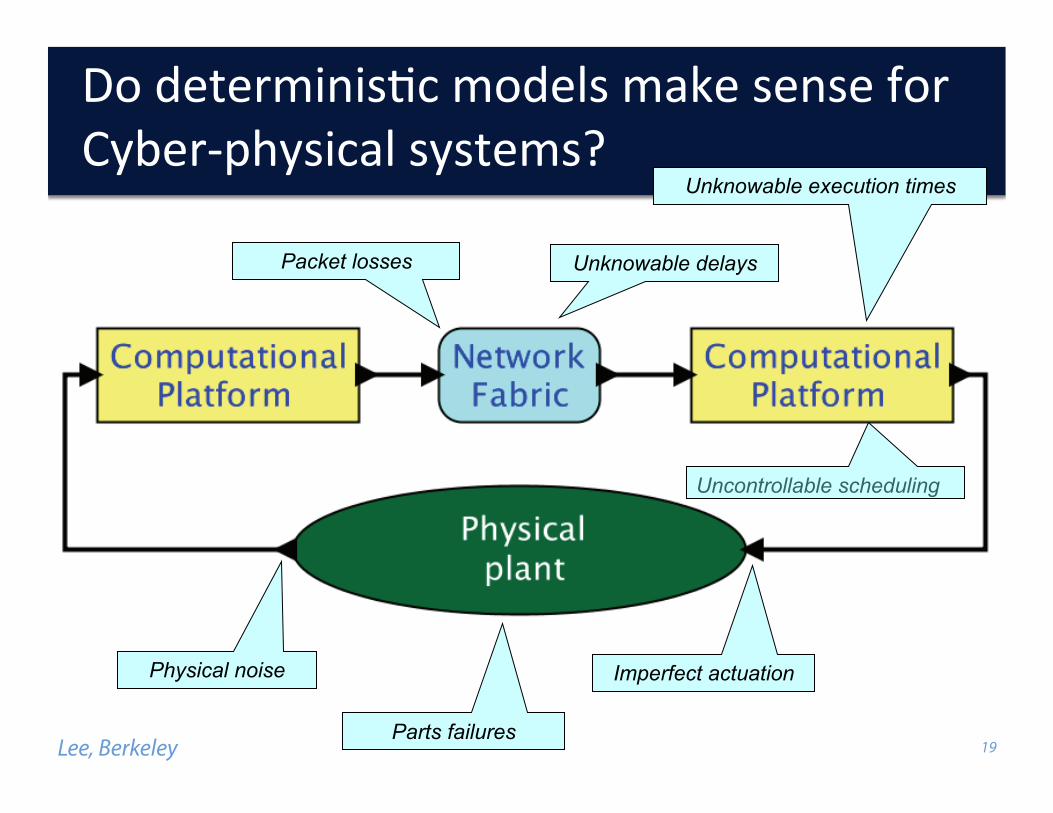
4)"?&-&'*3035/2"*)?&:5"*.L&"5&05&"=)'"#$%&'E+9$532.:"5$5-&*5W"
Lee, Berkeley 19
Physical noise Imperfect actuation
Parts failures
Unknowable delays Packet losses
Unknowable execution times
Uncontrollable scheduling

M+)0"/).'&/)2.)$4&")+2+6/0/=,%+%$,I)62/$)%0),'B/)$/+$/)02)0'(B)'@240)6/0/=,%+%$3&)
,26/($).2=)&#@/=E?"#$%&'()$#$0/,$N)
Lee, Berkeley 20

•! K0"$&%/+&/P"-9&"6.:,&")="."*)?&:":3&5"30"9)C"C&::"3-5"%&9.63)'"*.-29&5"-9.-")="-9&"+9$532.:"5$5-&*7"
•! K0"/+9%+//=%+9P"-9&"6.:,&")="-9&"+9$532.:"5$5-&*":3&5"30"9)C"C&::"3-5"%&9.63)'"*.-29&5"-9.-")="-9&"*)?&:7"
Lee, Berkeley 21
In engineering, model fidelity is a two-way street!
For a model to be useful, it is necessary (but not sufficient) to be able to be able to
construct a faithful physical realization.
N)?&:"M3?&:3-$"D&6353-&?"

8"N)?&:"
Lee, Berkeley 22

8"I9$532.:"D&.:3V./)0"
Lee, Berkeley 23

N)?&:"M3?&:3-$"
•! G)"."$&%/+3$0P"-9&"*)?&:"35"X.C&?7"
•! G)".0"/+9%+//=P"-9&"+9$532.:"'&.:3V./)0"35"X.C&?7"
KR*".0"&0;30&&'Y"M)'"#I1P"C&"0&&?"%&Z&'"*)?&:5"C3-9":&55"X.C&?"+9$532.:"'&.:3V./)057"
Lee, Berkeley 24

#9.0;30;"-9&"[,&5/)0"
G9&"H,&5/)0"35"+20"C9&-9&'"?&-&'*3035/2"*)?&:5"2.0"?&52'3%&"-9&"%&9.63)'")="2$%&'E+9$532.:"5$5-&*5">C3-9"93;9"T?&:3-$@7""G9&"H,&5/)0"35"C9&-9&'"C&"2.0"%,3:?"2$%&'E+9$532.:"5$5-&*5"C9)5&"%&9.63)'"*.-29&5"-9.-")="."?&-&'*3035/2"*)?&:">C3-9"93;9"+')%.%3:3-$@7"
Lee, Berkeley 25
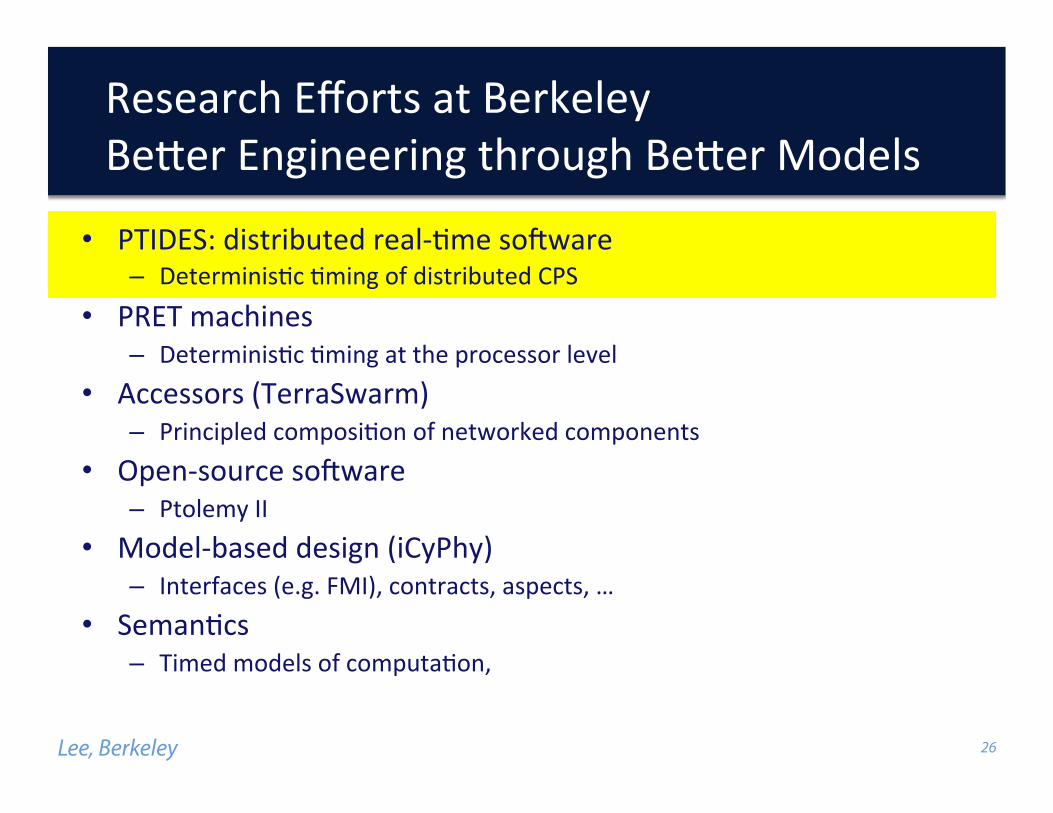
D&5&.'29"<F)'-5".-"\&'L&:&$"\&Z&'"<0;30&&'30;"-9'),;9"\&Z&'"N)?&:5"
•! IGK4<1!"?35-'3%,-&?"'&.:E/*&"5)SC.'&"–! 4&-&'*3035/2"/*30;")="?35-'3%,-&?"#I1"
•! ID<G"*.2930&5"–! 4&-&'*3035/2"/*30;".-"-9&"+')2&55)'":&6&:"
•! 822&55)'5">G&''.1C.'*@"–! I'3023+:&?"2)*+)53/)0")="0&-C)'L&?"2)*+)0&0-5"
•! ]+&0E5),'2&"5)SC.'&"–! I-):&*$"KK"
•! N)?&:E%.5&?"?&53;0">3#$I9$@"–! K0-&'=.2&5">&7;7"MNK@P"2)0-'.2-5P".5+&2-5P"Y"
•! 1&*.0/25"–! G3*&?"*)?&:5")="2)*+,-./)0P"
Lee, Berkeley 26
Lee, Berkeley 27
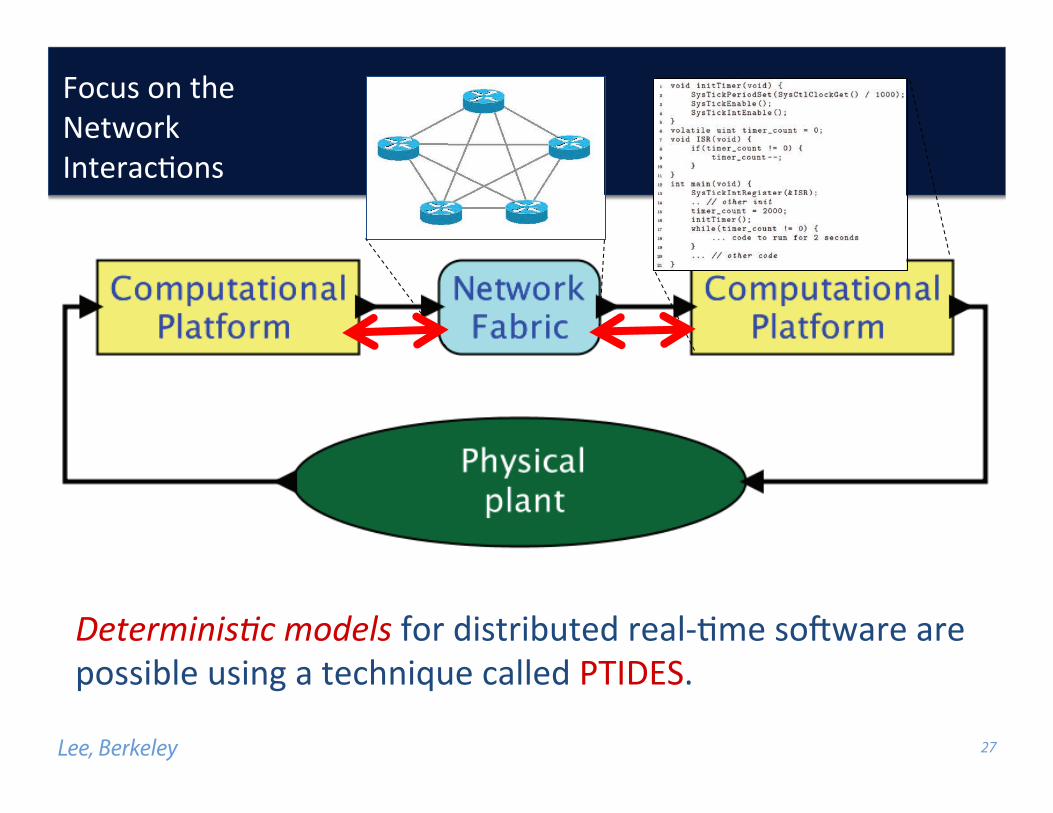
M)2,5")0"-9&"Q&-C)'L"K0-&'.2/)05"
*/0/=,%+%$3&),26/($"=)'"?35-'3%,-&?"'&.:E/*&"5)SC.'&".'&"+)553%:&",530;"."-&2903H,&"2.::&?"IGK4<17""

IGK4<1!"4352'&-&E<6&0-"1&*.0/25"("1$029')03V&?"#:)2L5"
Lee, Berkeley 28
Time-stamped events that are processed in time-stamp order.
This MoC is widely used in simulation and HDLs.
Given time-stamped inputs, it is a deterministic concurrent MoC.
A few texts that use the DE MoC

#:)2L"1$029')03V./)0"
•! QGI"•! ^I1"•! _`aa"•! G1Q"
Lee, Berkeley 29

:;$",.1"!"4352'&-&E&6&0-">4<@"*)?&:5".'&"=)'*.:"5$5-&*"5+&23T2./)05"-9.-"9.6&".0.:$V.%:&"?&-&'*3035/2"%&9.63)'57"J530;".";:)%.:P"2)0535-&0-"0)/)0")="/*&P"4<"2)*+)0&0-5"2)**,032.-&"63."/*&E5-.*+&?"&6&0-57"4<"*)?&:5"9.6&"+'3*.'3:$"%&&0",5&?"30"+&'=)'*.02&"*)?&:30;".0?"53*,:./)0P"C9&'&"/*&"5-.*+5".'&"."*)?&:30;"+')+&'-$"%&.'30;"0)"'&:./)0593+"-)"'&.:"/*&"?,'30;"&O&2,/)0")="-9&"*)?&:7"K0"-935"+.+&'P"C&"&O-&0?"4<"*)?&:5"C3-9"-9&"2.+.%3:3-$")="'&:./0;"2&'-.30"&6&0-5"-)"+9$532.:"/*&Y"
30 Lee, Berkeley
Ptides – A Robust Distributed DE MoC for IoIT Applications

Time stamp value is a deadline
Time stamp value is time of measurement
Actors wrap sensors
Actors wrap actuators
Lee, Berkeley 31
Ptides: First step: Time stamps bind to real time at sensors and actuators"

Ptides: Second step: Time-stamped messages.
Messages carry time stamps that define their
interleaving
Actors specify computation
Lee, Berkeley 32

Ptides: Third step: Network clock synchronization
GPS, NTP, IEEE 1588, TSN, time-triggered busses, ! they all work. We just need to bound the clock synchronization error.
Assume bounded clock error
Assume bounded clock error e
Assume bounded clock error e
Clock synchronization gives global meaning to
time stamps
Messages are processed in time-stamp order
Lee, Berkeley 33

Assuming perfect clock synchronization, this gives a deterministic model of overall closed-loop dynamics.
Ptides: Fourth step: Specify latencies in the model
Model includes manipulations of time stamps, which control
latencies between sensors and actors
Actuators may be designed to interpret input time stamps as the time at which to
take action. Feedback through the physical world Lee, Berkeley
34

Ptides: Fifth step: Safe-to-process analysis (ensures determinacy)
Safe-to-process analysis guarantees that events are processed in time-stamp order, given some assumptions.
Assume bounded network delay d
Assume bounded clock error
Assume bounded clock error e
An earliest event with time stamp t here can be safely merged when real time exceeds t + s + d + e – d2
Assume bounded clock error e
Assume bounded sensor delay s
Application specification of
latency d2 Technical: Need to have deadlines on network interfaces, to guarantee time-stamp order irrespective of execution times of actors. Lee, Berkeley 35

All of the assumptions are achievable with today’s technology, and are requirements anyway for hard-real-time systems. The Ptides model makes the requirements explicit.
Lee, Berkeley 36
So Many Assumptions?"
You will never strike oil by drilling through the map!
Violations of the requirements are detectable as out-of-order events and can be treated as faults.
Non-Synchronized Clocks

A “fault” is a violation of assumptions in the model.
! after an event here with a later time stamp has been processed, then one or more assumptions was violated.
If an event arrives here with an earlier time
stamp!
As with any model, the physical world may not conform to its rules. Violations should be treated as faults.
Lee, Berkeley 37
Handling Faults"

^));:&"1+.00&'"b"8"D&306&0/)0")="IGK4<1"
^));:&"30?&+&0?&0-:$"?&6&:)+&?"."6&'$"53*3:.'"-&2903H,&".0?".++:3&?"3-"-)"?35-'3%,-&?"?.-.%.5&57"
Lee, Berkeley 38
Proceedings of OSDI 2012

^));:&"1+.00&'"b"8"D&306&0/)0")="IGK4<1"
Lee, Berkeley 39
Distributed database with redundant storage and query handling across data centers.
Update to a record comes in. Time stamp t1.
Query for the same record comes in. Time stamp t2.

^));:&"1+.00&'"b"8"D&306&0/)0")="IGK4<1"
Lee, Berkeley 40
Query for the same record comes in. Time stamp t2.
If t2 < t1, the query response should be the pre-update value. Otherwise, it should be the post-update value.
Update to a record comes in. Time stamp t1.

^));:&"1+.00&'!"c9&0"-)"D&5+)0?W"
Lee, Berkeley 41
Query for the same record comes in. Time stamp t2.
When the local clock time exceeds t2 + e + d, issue the current record value as a response.
Synchronize clocks with error bound e.
Communication latency bound b.
Update to a record comes in. Time stamp t1.

^));:&"1+.00&'!"M.,:-d"
Lee, Berkeley 42
Query for the same record comes in. Time stamp t2.
If after sending a response, we receive a record update with time stamp t1 < t2 declare a fault. Spanner handles this with a transaction schema.
Synchronize clocks with error bound e.
Communication latency bound b.
Update to a record comes in. Time stamp t1.

1&&"\))L"
1&&"•! #9.+-&'"a!""
4352'&-&E<6&0-"N)?&:5"•! #9.+-&'"_e!""
N)?&:30;"G3*&?"1$5-&*5"
M'&&"?)C0:).?".-!"9Z+!ff+-):&*$7)';f5$5-&*5"
Lee, Berkeley 43 43

Lee, Berkeley 44
IGK4<1"4&.:5"C3-9"Q&-C)'L"K0-&'.2/)05"
O40);"'0)'@240)%+0/='&32+$);%0")0"/)?"#$%&'()?('+0N""

Lee, Berkeley 45
c9.-".%),-"-935"#$%&'EI9$532.:"\),0?.'$W"

D&5&.'29"<F)'-5"\&Z&'"<0;30&&'30;"-9'),;9"\&Z&'"N)?&:5"
•! IGK4<1!"?35-'3%,-&?"'&.:E/*&"5)SC.'&"–! 4&-&'*3035/2"/*30;")="?35-'3%,-&?"#I1"
•! ID<G"*.2930&5"–! 4&-&'*3035/2"/*30;".-"-9&"+')2&55)'":&6&:"
•! 822&55)'5"–! I'3023+:&?"2)*+)53/)0")="0&-C)'L&?"2)*+)0&0-5"
•! ]+&0E5),'2&"5)SC.'&"–! I-):&*$"KK"
•! N)?&:E%.5&?"?&53;0">3#$I9$@"–! K0-&'=.2&5">&7;7"MNK@P"2)0-'.2-5P".5+&2-5P"Y"
•! 1&*.0/25"–! G3*&?"*)?&:5")="2)*+,-./)0P"
Lee, Berkeley 46

The hardware out of which we build computers is capable of delivering “correct” computations and precise timing!
The synchronous digital logic abstraction removes the messiness of transistors. ! but the overlaying software abstractions discard the timing precision.
// Perform the convolution. for (int i=0; i<10; i++) { x[i] = a[i]*b[j-i]; // Notify listeners. notify(x[i]); }
Lee, Berkeley 47

PRET Machines – Giving Software the Capabilities their Hardware Already Has.
•! PREcision-Timed processors = PRET •! Predictable, REpeatable Timing = PRET •! Performance with REpeatable Timing = PRET
= PRET + Computing
With time
// Perform the convolution. for (int i=0; i<10; i++) { x[i] = a[i]*b[j-i]; // Notify listeners. notify(x[i]); }
http://chess.eecs.berkeley.edu/pret
Lee, Berkeley 48

ID<G"N.2930&5"
1,**.'$")="ID<G!"#)0-')::30;"/*30;")="5)SC.'&"C3-9"93;9"+'&2353)0"35"+)553%:&"C3-9"0)":)55")="+&'=)'*.02&7"""M)'"?&-.3:5!"K063-&"*&"%.2L7"]'"5&&"9Z+!ff29&557&&257%&'L&:&$7&?,f+'&-"
Lee, Berkeley 49

Y"80?"-9&'&"35"*)'&"Y"
•! IGK4<1!"?35-'3%,-&?"'&.:E/*&"5)SC.'&"–! 4&-&'*3035/2"/*30;")="?35-'3%,-&?"#I1"
•! ID<G"*.2930&5"–! 4&-&'*3035/2"/*30;".-"-9&"+')2&55)'":&6&:"
•! 822&55)'5">G&''.1C.'*@"–! I'3023+:&?"2)*+)53/)0")="0&-C)'L&?"2)*+)0&0-5"
•! ]+&0E5),'2&"5)SC.'&"–! I-):&*$"KK"
•! N)?&:E%.5&?"?&53;0">3#$I9$@"–! K0-&'=.2&5">&7;7"MNK@P"2)0-'.2-5P".5+&2-5P"Y"
•! 1&*.0/25"–! G3*&?"*)?&:5")="2)*+,-./)0P"
Lee, Berkeley 50

4&-&'*3035*W"
•! G9&"'&.:"C)':?"35"93;9:$",0+'&?32-.%:&7"•! 1)P".'&"?&-&'*3035/2"*)?&:5",5&=,:W"
–! K5"5$029')0),5"?3;3-.:":);32",5&=,:W""–!8'&"305-',2/)0E5&-".'293-&2-,'&5",5&=,:W"–! 130;:&E-9'&.?&?"3*+&'./6&"+');'.*5W""–!43F&'&0/.:"&H,./)05W"
Lee, Berkeley 51
For a model to be useful, it is necessary (but not sufficient) to be able to be able to
construct a faithful physical realization.

Avoid Building on Weak Foundations
The semantics of a modeling framework is the foundation for the models. Weak foundations result in less useful models. Deterministic models offer more solid foundations.
Lee, Berkeley 52
4&-&'*3035*W"
4&-&'*3035/2"*)?&:5"?)"0)-"&:3*30.-&"-9&"0&&?"=)'"')%,5-P"=.,:-E-):&'.0-"?&53;057"
K0"=.2-P"-9&$"/+'@(/"5,29"?&53;05P"%&2.,5&"-9&$"*.L&"3-"*,29"2:&.'&'"C9.-"3-"*&.05"-)"9.6&"."=.,:-d"
Lee, Berkeley 53
Modeling in an Artificial Universe Components of a model interact in an artificial universe. The modeling framework provides the laws of physics of that universe. Nonnegotiable requirement: The laws of physics must be the same to every observer. Desirable properties: •! Determinism •! Understandability Not necessary: The laws need not be those of the physical world. We are free to invent.
Lee, Berkeley 54

#)02:,53)0"
#I1"?&*.0?5"0&C"C.$5")="*)?&:30;7""K-"'&H,3'&5"6/0/=,%+%$3&)*)?&:5"-9.-"&*%'.2&"3,/P"-);&-9&'"C3-9".'%0".4("+9$532.:"'&.:3V./)057)
55 55
Raffaello Sanzio da Urbino – The Athens School
See: Lee, "The Past, Present, and Future of Cyber-Physical Systems: A Focus on Models," Sensors, 15(3), February, 2015. (Open Access)